Document
Werbung

Messtechnik
—————————————Teil-Skript zu den Vorlesungen—————————————
Grundlagen der Messund Regelungstechnik
——————————————————————————sowie——————————————————————————
Grundlagen der Mess- und
Automatisierungstechnik
Stand: 1. 10. 2002, letzte Bearbeitung durch T. Weber
Prof. Dr.-Ing. H. Fißan
Gerhard-Mercator-Universität GH Duisburg
Prozess- und Aerosolmesstechnik
Bismarckstr. 81
47057 Duisburg
LITERATURLISTE..........................................................................................................................5
1
EINFÜHRUNG ..........................................................................................................................7
1.1
1.2
AUFGABE DER MESSTECHNIK ...............................................................................................................................7
ENTWICKLUNG DER MESSTECHNIK.......................................................................................................................9
1.3
EINTEILUNG DER MESSTECHNIK .........................................................................................................................10
1.4
1.5
DEFINITIONEN VON HÄUFIG IN DER MESSTECHNIK BENUTZTEN BEGRIFFEN .......................................................10
ZERLEGUNG DER MESSEINRICHTUNG IN IHRE KOMPONENTEN ...........................................................................11
1.6
1.7
MESSVERFAHREN ...............................................................................................................................................14
MESSGRÖßEN ......................................................................................................................................................19
2
BESCHREIBUNG DES VERHALTENS VON MESSEINRICHTUNGEN UND DEREN
KOMPONENTEN ...........................................................................................................................24
2.1
2.2
2.3
MESSNORMALE ...................................................................................................................................................24
BESCHREIBUNG DES STATISCHEN VERHALTENS VON MESSEINRICHTUNGEN UND DEREN KOMPONENTEN .........34
BESCHREIBUNG DES DYNAMISCHEN VERHALTENS VON MESSEINRICHTUNGEN UND DEREN KOMPONENTEN .....38
2.3.1
2.3.2
3
Sprungantwort eines Messgerätes mit Verzögerung.................................................................................38
Sprungantwort eines Systems mit Totzeit .................................................................................................40
MESSFEHLER ........................................................................................................................42
3.1
DEFINITION VON MESSFEHLERN .........................................................................................................................42
3.2
3.3
FEHLERURSACHEN ..............................................................................................................................................45
STATISCHE FEHLER.............................................................................................................................................47
3.3.1
Statische Fehler unter Normalbedingungen .............................................................................................48
3.4
3.3.2
Statische Fehler bei Abweichungen von Normalbedingungen .................................................................52
DYNAMISCHE FEHLER ........................................................................................................................................54
3.5
3.4.1
Graphische Ermittlung der Übertragungsfunktion...................................................................................63
BEGRENZUNG DYNAMISCHER FEHLER ................................................................................................................64
3.6
4
4.1
4.2
ZUFÄLLIGE FEHLER ............................................................................................................................................66
3.6.1
Bestimmung zufälliger Fehler ..................................................................................................................68
3.6.2
Mittelwert, Schätzwert und Standardabweichung ....................................................................................69
3.6.3
3.6.4
Der zufällige Fehler in der Wahrscheinlichkeitsrechnung .......................................................................71
Kovarianz .................................................................................................................................................76
3.6.5
Mittelwerte aus der Stichprobe und der Verteilung..................................................................................78
FEHLERFORTPFLANZUNG...............................................................................................82
FEHLERFORTPFLANZUNG DER SYSTEMATISCHEN MESSFEHLER ..........................................................................82
FEHLERFORTPFLANZUNG ZUFÄLLIGER MESSFEHLER ..........................................................................................84
4.2.1
Berechnung der Standardabweichung eines mit zufälligen Fehlern behafteten Messergebnisses ...........85
4.2.2
Überprüfung der Aussagefähigkeit der Schätzwerte
x̂ und s .................................................................88
4.3
MESSUNSICHERHEIT BEI BEKANNTEN GARANTIEFEHLERGRENZEN .....................................................................90
4.4
FORTPFLANZUNG VON FEHLERGRENZEN ............................................................................................................90
5
5.1
STRUKTUREN VON MESSEINRICHTUNGEN ...............................................................93
KETTENSTRUKTUR ..............................................................................................................................................93
2
5.2
PARALLELSTRUKTUR ..........................................................................................................................................94
5.3
KREISSTRUKTUR .................................................................................................................................................96
6
SENSOREN, AUFNEHMER, FÜHLER, SONDEN, GEBER ............................................99
6.1
ALLGEMEINES ÜBER FÜHLER ..............................................................................................................................99
6.2
6.3
ANFORDERUNGEN AN FÜHLER ..........................................................................................................................100
EINTEILUNG DER FÜHLER .................................................................................................................................100
6.4
FÜHLER FÜR GEOMETRISCHE GRÖßEN ..............................................................................................................101
6.4.1
Widerstandsgeber zur Längen- und Winkelmessung ..............................................................................101
6.5
6.4.2
6.4.3
Induktive Geber ......................................................................................................................................104
Kapazitive Geber ....................................................................................................................................111
6.4.4
Hall-Sonde..............................................................................................................................................118
FÜHLER FÜR MECHANISCHE GRÖßEN ................................................................................................................122
6.5.1
Dehnungsmessstreifen (DMS) ................................................................................................................122
6.5.2
6.5.3
6.6
6.7
FÜHLER ZUR TEMPERATURMESSUNG ................................................................................................................136
6.6.1
Thermoelement .......................................................................................................................................136
6.6.2
Vergleichsstelle für Temperaturen .........................................................................................................141
6.6.3
6.6.4
Widerstandsthermometer........................................................................................................................142
Heißleiter................................................................................................................................................145
FÜHLER FÜR CHEMISCHE SUBSTANZEN UND ZUR GASANALYSE .......................................................................146
6.7.1
Kohlendioxidmesser nach dem Wärmeleitverfahren ..............................................................................147
6.7.2
6.8
7
Magnetischer Sauerstoffmesser ..............................................................................................................147
6.7.3
Ionisations-Rauchmelder........................................................................................................................148
FÜHLER FÜR STRÖMUNGSTECHNISCHE GRÖßEN................................................................................................150
6.8.1
6.8.2
6.9
Piezoelektrischer Fühler.........................................................................................................................128
Magnetoelastischer Kraftmessfühler ......................................................................................................133
Hitzdrahtanemometer .............................................................................................................................150
Induktions-Durchflussmesser .................................................................................................................151
FÜHLER ZUR STRAHLUNGSMESSUNG ................................................................................................................153
6.9.1
Photoelement und -diode........................................................................................................................153
6.9.2
Photozelle ...............................................................................................................................................157
6.9.3
Photomultiplier.......................................................................................................................................158
MESSUMFORMER ..............................................................................................................159
7.1
7.2
AUFGABE DER MESSUMFORMER .......................................................................................................................159
MESSVERSTÄRKER............................................................................................................................................159
7.3
7.2.1
Störgrößen bei Messverstärkern.............................................................................................................161
BRÜCKENSCHALTUNGEN ..................................................................................................................................163
7.3.1
7.3.2
Abgleich-Widerstandsmessbrücke ..........................................................................................................163
Ausschlag-Widerstandsmessbrücke........................................................................................................165
7.3.3
Wechselstrom-Messbrücken ...................................................................................................................170
7.4
TRÄGERFREQUENZ-BRÜCKE UND -VERSTÄRKER ..............................................................................................175
7.4.1
Beispiel zur Trägerfrequenzbrücke.........................................................................................................177
8
ANZEIGEGERÄTE ..............................................................................................................179
8.1
KOMPENSATOREN .............................................................................................................................................179
8.1.1
8.1.2
Einfache Kompensation mit Spannungsteiler .........................................................................................179
Kompensationsschreiber ........................................................................................................................180
3
8.2
8.1.3
Doppelte Kompensation .........................................................................................................................181
8.1.4
Lindeck-Rothe-Kompensator ..................................................................................................................182
8.1.5
Gleichstromkompensation ......................................................................................................................182
ELEKTRISCHE MESSWERKE ..............................................................................................................................183
8.2.1
8.2.2
Drehspulmesswerk..................................................................................................................................183
Kernmagnetmesswerk.............................................................................................................................186
8.2.3
Elektrodynamisches Messwerk ...............................................................................................................188
4
Literaturliste
/l/
Kronmüller, H.
Methoden der Messtechnik
Shaker-Verlag Karlsruhe 1979
Standort: 41 WFB 1538
/2/
Schrüfer, E.
Elektrische Messtechnik: Messung elektrischer und nicht elektrischer Größen
Carl Hanser Verlag, München
Standort: 43 XXA 1481(2)
/3/
Felderhoff, R. Elektrische Messtechnik
Carl Hanser Verlag
Standort: 43 XXA 1203(4)
/4/
Jüttmann, H.
Grundlagen des elektrischen Messens nichtelektrischer Größen
VDI-Verlag Düsseldorf
Standort: 45 XXL 1062
151
Merz, L.
Grundkurs der Messtechnik
Band 1: Das Messen elektrischer Größen
Standort: 41 WFB 1083-1
Band 2: Das elektrische Messen nichtelektrischer Größen
Standort:
41 WFB 1083-2
R. Oldenbourg Verlag, München 1973 1974
/6/
Kronmüller, H.
Prozeßmeßtechnik
Standort: 41 WFB 1106
Band 1: Elektrisches Messen nichtelektrischer Größen
Standort: 41 WFB 1106-1
Springer Verlag
/7/
Kautsch, R.
Messelektronik nichtelektrischer Größen Band 1: Grundlagen
Standort: 41 XY.L 1004-1
Band 2: MessAhler und Messverfahren
Standort: 41 XY.L 1004-2
Band 3: Messgrößen und Messeinrichtungen
Standort: 41 XXL 1004-3
Hans Holzmann Verlag
/8/
Wolff, I.
Grundlagen der Elektrotechnik, 2. Auflage 1980
H. Wolff Verlag
Standort: 45 XVP 2230
5
/9/
Kuchling, H.
Physik, Formel und Gesetze,
17. Auflage 1982 Buch- und Zeit-Verlagsgesellschaft mbH
Standort:
07 UAP 2627
/10/
Tränkler, Hans-Rolf
Taschenbuch der Messtechnik mit Schwerpunkt Sensortechnik
Oldenbourg, 1992
ISBN 3-486-22230-0
Preis: 49.80DM
/l1/
Kronmüller, Heinz
Methoden der Messtechnik
Schnäcker-Verlag, 1988
ISBN 3-922200-50-8
Preis: 48.OODM
/12/
Krist, Thomas
Mess-, Steuerungs-, Regelungstechnik: Formeln, Daten, Begriffe,- Ar Beruftsausbildung, Studium, Praxis
Hoppenstedt-Technik-Tab.-Verlag, 1991
ISBN 3-87807-151-5
Preis: 28.OODM
Standort: 45 WFM 1672
/13/
Felderhoff, Rainer
Elektrische und elektronische Messtechnik: analoge und digitale Messsysteme - Messgeräte Messverfahren
Hanser Verlag 1993
ISBN 3-446-17454-0
/14/
Prock, Johannes
Einführung in die Prozeßmeßtechnik
B.G. Teubner Verlag, Stuttgart, 1997
ISBN3-519-06198-8
/15/
Hoffmann, J.
Messen nichtelektrischer Größen
Springer Verlag, Heidelberg, 1996
Standort: 43 XXL 1517
/16/
Lerch, R.
Elektrische Messtechnik: Analoge, digitale und computergestützte Verfahren
Springer Verlag, Heidelberg, 1996
Standort: 42/43 XXA 1732
/17/
Lerch, R., Kaltenbacher, M., Lindinger, F.
Übungen zu Elektrischen Messtechnik:
Springer Verlag, Heidelberg, 1996
Standort:
42/43
XXA
6
174
1 Einführung
1.1 Aufgabe der Messtechnik
Aufgabe der Messtechnik ist das Messen. Messen heißt, eine physikalische Größe (z. B. Druck)
nach Zahl und Einheit zu erfassen und darzustellen:
Messgröße =ˆ Zahl ⋅ Einheit
X = x⋅N
(1.1)
Die Zahl x gibt an, wie oft die Vergleichsgröße (Einheit) N abgetragen oder aufgewendet werden
muss, um den betreffenden Wert X der zu messenden Größe zu erreichen. Beim Messen wird also
immer der Wert einer Größe mit dem einer Vergleichsgröße (Einheit) verglichen.
Bei einer Längenmessung mit einem Maßstab wird abgezählt, wie oft sich die Teilung des Maßstabes auf der zu messenden Länge abtragen lässt.
Bei der Volumenmessung einer Flüssigkeit wird der Behälter, in dem sich die Flüssigkeit befindet,
mit einem Hohlmaß ausgeschöpft und die Zahl der vollen Hohlmaße bestimmt.
Nach dem Bisherigen sind zwei Voraussetzungen für eine Messung nötig:
1. Die Messgröße muss eindeutig definiert sein.
2. Die Vergleichsgröße (Einheit) oder das Normal müssen durch eine Konvention festgelegt
werden.
Bei Größen wie Länge oder Zeit scheint die erste Forderung selbstverständlich, spricht man aber
von einer Raumtemperatur, wird man einen oder mehrere Orte im betreffenden Raum festlegen
müssen, deren Temperatur als repräsentativ für den Raum gilt. Auch wird ein Wirkungsgrad eines
Motors definiert werden müssen. Ähnliches gilt für die Normale. Eine „Elle“ als Länge des Unterarmes eines Menschen ist kein gutes Längennormal, wenn sich verschieden große Menschen dieses
Normals bedienen.
Die „Conférence Générale des Poids et Mesures“ (CGPM) legt in ständiger Arbeit Basisnormale
fest, die sich nach dem Grundsatz der einfachen Realisierung und Anwendung und nach dem jüngsten Stand der Technik richten.
7
Zur Zeit sind sieben voneinander unabhängige, sogenannte absolute oder Basisnormale von der
CGPM festgelegt worden. Die sieben zu den Basisnormalen gehörenden Basiseinheiten sind in
Tabelle 1.1 dargestellt:
Tabelle 1.1: SI-Basiseinheiten
Basisgröße
Name
Zeichen
Länge
das Meter
m
Masse
das Kilogramm
kg
Zeit
die Sekunde
s
Elektr. Stromstärke
das Ampère
A
Temperatur
das Kelvin
K
Lichtstärke
die Candela
cd
Stoffmenge
das Mol
mol
Weitere Einheiten können aus den Basiseinheiten durch Produkt- oder Quotientenbildung abgeleitet
werden.
Ein kohärentes Maßsystem ist ein System, bei dem alle aus den Basiseinheiten abgeleiteten Einheiten mit dem Zahlenwert 1 versehen sind.
Das System der CGPM mit den sieben Basiseinheiten und den daraus kohärent abgeleiteten Einheiten, trägt den Namen „Système International d'Unités“. In der Umgangssprache redet man von
den SI-Einheiten.
Für die Bildung der abgeleiteten Einheiten und der Kohärenz hier ein Beispiel: Die abgeleitete Einheit „Kraft“ erhält einen eigenen Namen, das Newton [N]. Es errechnet sich aus der Beziehung
„Kraft ist gleich Masse mal Beschleunigung“ zu
1N = 1
kg ⋅ m
s2
Die Zahl sieben der gewählten SI-Basiseinheiten ist weitgehend willkürlich. Andere Maßsysteme
leiten alle notwendigen Einheiten aus einer geringeren Zahl von Basiseinheiten ab (z. B. im cgsSystem mit der Länge [centimetre], der Masse [gramme] und der Zeit [second]).
8
1.2 Entwicklung der Messtechnik
Die Entwicklung der Messtechnik innerhalb der letzten 100 bis 150 Jahre ist gekennzeichnet durch:
1. Steigerung der Messgenauigkeit
Höchste Messgenauigkeit bei der Längenmesstechnik wird z. B. durch den Einsatz von
Laser-Interferometern als
Längenvergleichsnormal erreicht. Die inkrementale
Längenmessung wird mit der Wellenlänge des He-Ne-Lasers (λ = 632,8 nm) als
Normalinkrement durchgeführt.
2. Übergang von der vergleichenden mechanischen Messung zur elektrischen Messung nichtelektrischer Größen
Eine wesentliche Reduzierung der Messunsicherheit wird durch den Einsatz elektrischer und
optischer Sensoren erreicht.
3. Verlagerung von der Einzelmessung zur Funktionsmessung
Es wird nicht das produzierte Werkstück vermessen, sondern es wird die Maschine auf Übereinstimmung mit einer vorgegebenen Funktion überprüft; Fehleranalyse; Korrekturverfahren
(Beispiel: Vorschubmessung an einer Drehbank); Verlagerung des Messvorganges in den Bearbeitungsablauf (prozessbegleitende oder online Messtechnik).
4. Einsatz von Messwertverarbeitern
Möglichkeiten von Messwertverarbeitern:
•
Datenumrechnung (Eichung)
•
Datendarstellung (Kurven)
•
Datenanalyse (Fehler)
•
Kontrolle der Messtechnik (Verstärkung)
•
Steuerung des Messvorganges
•
Datenspeicherung
•
Datenrückführung (Regelungstechnik)
•
Kommunikation mit Dateien und Datenbanksystemen
5. Sensorik
Sensoren sind kleine Messfühler, deren Fertigung mit Methoden der Mikroelektronik erfolgt.
Durch Miniaturisierung und Massenproduktion, die zu sehr niedrigen Herstellungskosten
führt, werden zusätzliche Einsatzbereiche geschaffen.
9
1.3 Einteilung der Messtechnik
Prinzipiell kann man mehrere Kriterien für eine Untergliederung heranziehen; z. B.
1. nach den Messgrößen
2. nach der Art der Messtechnik
3. nach den Ausgangssignalen der Geber
Man kann unterteilen nach der Art der Messgrößen in:
Messtechnik für nichtelektrische (z. B. Druck) und elektrische Größen, wobei nach der Art der
Messtechnik die Messtechnik nichtelektrischer Größen noch unterteilt werden kann in:
•
Mechanische Messtechnik und
•
Elektrische Messtechnik nichtelektrischer Größen
Der Messvorgang lässt sich in einem idealisierten Blockschaltbild darstellen:
Messgröße
(Eingangsgröße x)
Prozess
anzeigende Größe
(Ausgangsgröße y)
Messeinrichtung
Normal
Abbildung 1.1: Idealisierter Messvorgang im Blockschaltbild
Die Messgröße x, das Signal, wird aus dem Prozess der Messeinrichtung zugeführt, d.h. der
Messwert wird erfasst. In der Anzeige y wird der Messwert dargestellt. Die Messeinrichtung enthält
und speichert die Information über das Normal. Man kann auch sagen, in der Messeinrichtung ist
das Normal verkörpert. Messeinrichtungen haben die Struktur einer gerichteten Wirkungskette.
Zeichnet man das Strukturbild einer Messeinrichtung im Detail, erkennt man, wie die Messgröße
von Baugruppe zu Baugruppe in eine andere Messgröße umgeformt wird bis endlich die
Ausgangsgröße vorliegt. Im idealisierten Bild wirken auf die Messeinrichtung nur die Messgröße
und das Normal. Störeinflüsse jeder Art sind hier nicht in Betracht gezogen.
1.4 Definitionen von häufig in der Messtechnik benutzten Begriffen
Die Messgröße ist die physikalische Größe, deren Wert durch die Messung erfasst werden soll.
Der Anzeigebereich einer Messeinrichtung ist der Bereich der Messwerte, der am
Anzeigeinstrument abgelesen werden kann.
10
Der Messbereich ist der Teil des Anzeigebereiches, für den der Fehler innerhalb der vereinbarten
Fehlergrenzen liegt.
Die Messgrenze kennzeichnet den Wert, bis zu dem die Messeinrichtung ohne bleibende Schäden
bei tolerierbaren Fehlern eingesetzt werden kann.
Die Überlastungsgrenze kennzeichnet den Wert, bei dessen Überschreitung die Messeinrichtung
bleibende Veränderungen bis zur Zerstörung erfährt.
Der Messwert ist der aus der Anzeige ermittelte Wert der Messgröße. Er wird als Produkt aus Zahlenwert und Einheit der Messgröße angegeben. Er kann gleich der Ausgabe sein.
Das Messergebnis wird im allgemeinen aus mehreren Messungen nach einer bestimmten Auswertevorschrift gewonnen. Im einfachsten Fall ist ein einzelner Messwert bereits das Messergebnis.
Die Messeinrichtung ist die Gesamtheit der zum Zweck der Messung benutzten Elemente. Dazu
gehören Fühler, Rechengeräte, Verstärker und die Ausgabegeräte zur Darstellung der Messgröße.
Das Messsystem umfasst neben der Messeinrichtung auch diejenigen Teile des Prozesses, welche
durch den Messvorgang beeinflusst werden.
Das Messgerät ist eine Baueinheit, welche Teil oder Ganzes der Messeinrichtung sein kann.
Die Messkette ist eine häufig gewählte Struktur für eine Messeinrichtung. Die Messgeräte werden
hierbei hintereinander geschaltet.
Das Messprinzip ist der zur Messung benutzte physikalische Effekt.
Das Messverfahren gibt die Funktionsweise der Messeinrichtung an. Man unterscheidet analoge
und digitale, und auch direkte und indirekte Messverfahren.
1.5 Zerlegung der Messeinrichtung in ihre Komponenten
Messfühler
Der Messfühler (Geber, Sensor, Aufnehmer) dient zur Erfassung und Umwandlung der elektrischen
oder nichtelektrischen Messgröße in ein Signal. Dieses Signal kann in unterschiedlichen Größen
vorliegen:
11
•
Thermoelement als Messfühler; die gemessene Temperaturdifferenz wird als elektrische
Spannung abgebildet
•
Dehnungsmessstreifen (DMS); z. B. Ausdehnung von Werkstücken wird in eine elektrische
Widerstandsänderung umgewandelt
•
Piezokristall; eine mechanische Kraft bewirkt Ladungsverschiebung. Dadurch entsteht
elektrische Ladung.
•
Induktive Messfühler; die Verschiebung des Eisenkerns in einer Spule bewirkt eine Induktivitätsänderung
•
Kapazitive Messfühler; eine Verschiebung des Dielektrikums oder eine Abstandsänderung
der Kondensatorplatten bewirkt eine Kapazitätsänderung
•
Ionisationskammer; bei der Gasionisation, hervorgerufen durch α-, β- oder γ- Strahlung, wird
als Folge des Ionenflusses ein elektrischer Strom geliefert
Da der Messfühler dem physikalischen Raum die Messgröße entnimmt und sie in ein Signal abbildet, bezeichnet man Messfühler auch als Übertragungsglieder.
Messumformer
Die von Messfühlern gelieferten Signale sind meist sehr schwach und von verschiedener Art. Deshalb werden den Gebern Messumformer nachgeschaltet, welche die Aufgabe haben, das Signal zu
verstärken und zu normieren. Dabei werden folgende Forderungen an den Messverstärker gestellt:
•
Der Verstärker soll ein genügend großes Frequenzband mit gleichem Verstärkungsfaktor
übertragen
V
100%
3dB 70,7%
0
•
102
106
104
Bandbreite bei 3 dB
108
f / [Hz]
Der Verstärker muss auch über längere Zeiträume gleichbleibende Eigenschaften aufweisen.
Diese Forderung ist die Voraussetzung für die Reproduzierbarkeit von Messergebnissen,
12
(konstant trotz schwankender Umgebungstemperatur oder Netzspannung und eine möglichst
geringe Drift)
•
Das Ausgangssignal eines Messumformers soll die Eigenschaft einer eingeprägten Größe
haben, d.h. die Ausgangsgröße soll in gewissen Grenzen unabhängig von der Anzahl und der
Art der angeschlossenen Geräte sein.
Anzeige
Die Anzeige ist bei anzeigenden Messgeräten gegeben durch den an einer Skala abgelesenen Stand
der Marke. Die Anzeige kann als Zahlenwert, in Einheiten der Messgröße, in Skalenteilen, in Längeneinheiten, bei digitalen Anzeigen in Ziffernschritten angegeben werden.
Zur Beschreibung des Messvorgangs lassen sich die oben aufgeführten Komponenten in Blockschaltbildern darstellen.
Beispiele:
1. Manometer (Mechanische Messtechnik nichtelektrischer Größen)
Druck
mech.
Messgröße
Manometer
Weg
Getriebe
Winkel
Zeiger
MU
normiertes
Signal
A
F
Fühler
Messumformer
Anzeiger
2. Dehnungsmessstreifen (Elektrische Messtechnik nichtelektrischer Größen)
Dehnung
mech.
Messgröße
Widerstandsänderung
elektr.
Signal
F
DMS
Spannung
normiertes
Signal
MU
Wheatstonesche Brücke
A
Spannungsmesser
3. Spannungsmesser (Messtechnik elektrischer Größen)
Spannung
elektr.
Meßgröße
Drehspule
F
MU
Winkel
Zeiger
normiertes
Signal
A
Diese Komponenten sind häufig in einem Gerät zusammengefasst.
13
1.6 Messverfahren
Das Messverfahren gibt die Funktionsweise der Messeinrichtung an. Die Anwendung eines Messprinzips führt auf Messverfahren, die sich in die direkten und indirekten Messverfahren einteilen
lassen.
Beim direkten Messverfahren wird der gesuchte Messwert durch unmittelbaren Vergleich mit
einem Bezugswert derselben Messgröße gewonnen.
Beispiel: Bei einer Handelswaage wird die unbekannte Masse mit der bekannten Masse der Gewichtssteine verglichen.
Unter die direkten Messverfahren werden auch solche eingeordnet, bei welchen man den Messwert
unmittelbar aus der Anzeige ohne zusätzliche Berechnung erhält.
Dahinter steht die Auffassung, dass hier vor der Messung ein Vergleich mit einem Normal durchgeführt wurde, der in der Skalenteilung festgehalten wird.
Beispiel: Die Messung einer elektrischen Spannung mit Hilfe eines Drehspulmessgerätes, die unter
den gleichen Bedingungen wie beim Justieren mit dem Spannungsnormal erfolgt.
Beim indirekten Messverfahren wird die Messgröße über physikalische Zusammenhänge auf
eine andere Größe zurückgeführt und aus dem Wert dieser Größe ermittelt.
Beispiel: Druckmessung mit dem U-Rohr. Normal ist die Längenteilung der Höhendifferenz der
Quecksilbermenisken in den Schenkeln. Die Beziehung zwischen dem Druck p und der Anzeige h
ist durch die hydrostatische Grundgleichung gegeben:
p = g ⋅ ρ ⋅h
(1.2)
(g Erdbeschleunigung, ρ Dichte des Quecksilbers, h Höhe der Quecksilbersäule). Hier wird nicht
mit einem Normaldruck justiert. Die Grundgleichung liefert die Beziehung zwischen der
Messgröße „Druck“ und der Anzeigegröße „Quecksilbersäulenlänge“.
Zu den indirekten Messverfahren gehören auch die Fundamentalverfahren zum Erfassen der abgeleiteten Einheiten aus den Basiseinheiten.
Beispiel: Die abgeleitete Einheit „Druck“ kann mit Hilfe eines Kolbenmanometers aus der Masseneinheit gewonnen werden. Dabei drückt ein beweglicher Kolben der Fläche A auf eine Hydrau14
likflüssigkeit. Der Kolben ist mit der Masse m belastet, die Kraft auf den Kolben im Schwerefeld
der Erde ist m ⋅ g (g Erdbeschleunigung). Im statischen Zustand ist die Druckkraft gleich der
Schwerkraft, es gilt für den Druck p:
p⋅ A = m⋅g
(1.3)
Nach der Ausgabeeinrichtung lassen sich analoge und digitale Verfahren unterscheiden:
Ein Messverfahren heißt analog, wenn - zumindest im Prinzip - jedem möglichen Wert der
Messgröße im Messbereich ein bestimmter Wert der Ausgangsgröße entspricht. Ein Messverfahren heißt digital, wenn das Ausgangssignal in Ziffern angezeigt oder verarbeitet wird.
Beide Verfahren sollen unter verschiedenen Gesichtspunkten verglichen werden. Bei analogen Verfahren wird die Messgröße, d.h. Maßzahl mal Einheit, in eine andere physikalische Größe umgeformt.
Beispiel: Im Drehspulmesswerk wird die Größe „elektrischer Strom“ in die Größe „Winkelausschlag des Zeigers“ umgesetzt.
Im digitalen Verfahren wird die Maßzahl allein verarbeitet und in Form von Ziffern zur Anzeige
gebracht.
15
Abbildung 1.2: Die Funktion Messgröße/Ausgangsgröße beim digitalen Verfahren
Beispiel: An der Tanksäule wird einfach gezählt, wie oft ein Probevolumen in den Tank abgefüllt
wurde und diese Zahl im Zähler angezeigt. Digitale Verfahren quantisieren das Ausgangssignal.
Die Größe der Quanten ist durch die letzte Ziffer der Anzeige gegeben.
Beim digitalen Verfahren ist durch die Ziffernanzeige die Güte der Ablesung definiert, sie erfolgt
praktisch fehlerfrei. Für eine analoge Anzeige gilt dies nicht.
Dort muss der Ablesende eine Analog-Digital-Umsetzung vornehmen, seine Fähigkeit zu
interpolieren wird beansprucht.
Abbildung 1.3: Beispiele für analoge und digitale Anzeigen
Die analoge Anzeige ist aber übersichtlicher. Der Wert der Messgröße lässt sich grob mit einem
flüchtigen Blick erfassen. Ebenso klar gibt ein analoger Schreiber den Trend einer Messgröße wieder. In Schaltwarten sind deshalb analoge Geräte weit verbreitet. Oft werden Messgrößen, die in
digitaler Form vorliegen, auf besonderen Ausgabeeinrichtungen graphisch, d.h. in dem Fall analog,
dargestellt.
Die digitale Messwertverarbeitung arbeitet mit Zahlen. Mit dem nötigen Aufwand kann die Verarbeitung praktisch fehlerlos geschehen. Die Verarbeitung der Daten geschieht meist auf der Basis
des Zählens, d.h. die Zahlen werden nacheinander oder sequentiell verarbeitet. Mit größerer Genauigkeit nimmt die Verarbeitungszeit zu. Die analogen Verfahren arbeiten kontinuierlich und
simultan.
Bei der Messwertübertragung sind die digitalen Verfahren vorteilhaft. Sie sind gegen Störeinflüsse
viel unempfindlicher als die analogen Verfahren. Die Güte von analogen Signalen hängt sehr von
den Drift- und Rauscheigenschaften der elektronischen Bauteile ab, weiter von Fremdfeldeinstreuungen. Das Auszählen einer Impulsfolge mit zwei Signalzuständen „Ein“ und „Aus“ dagegen ist
selbst noch bei einem hohen Störpegel möglich.
Digitale Geräte arbeiten fast alle mit elektrischer Hilfsenergie. Sie benutzen elektronische und auch
feinwerktechnische Baugruppen. Die Digitaltechnik ist mit elektronischen Mitteln besonders einfach zu realisieren. Die Messtechnik hat aber die Aufgabe, sehr verschiedene physikalische Größen
16
zu erfassen und darzustellen. Für diese Grundaufgabe sind aber kaum Prinzipien bekannt, die eine
konsequente digitale Lösung ermöglichen. Fast alle Vorgänge der Physik verlaufen im allgemeinen
kontinuierlich, ihre Beschreibung geschieht mit Differentialgleichungen. Deshalb wird auch voraussichtlich in Zukunft die Erfassung einer nichtelektrischen Messgröße analog erfolgen und erst
diese, in ein elektrisches Analogsignal umgeformte Größe, mit elektronischen Mitteln digitalisiert
und digital weiterverarbeitet werden können.
Kontinuierlich arbeitende Verfahren sind in der Lage, ohne Unterbrechung Messwerte zu liefern.
Diskontinuierlich arbeitende Verfahren geben nur zu bestimmten, oft äquidistanten Zeitpunkten,
einen neuen Messwert. Sie werden auch als „getastete Systeme“ bezeichnet.
Diskontinuierliche Systeme enthalten mindestens eine Baugruppe, die nur zu diskreten Zeitpunkten
arbeitet.
Es leuchtet sofort ein, dass bei getasteten Systemen Information verloren geht. Ein Gaschromatograph etwa, der im Abstand von einigen Minuten eine Analyse ausgibt, kann keine Aussage über
den Verlauf der interessierenden Stoffkonzentrationen für die Zeit zwischen zwei Analysenausgaben treffen. Oder: Ein Drehzahlmesser, der volle Umdrehungen erfasst, kann nicht Aufschluss über
Änderungen der Drehgeschwindigkeit geben, die innerhalb einer Umdrehung vorkommen.
Die Analog-Digital-Umsetzung wird bei den meisten Messgeräten in diskontinuierlich arbeitenden
Systemen durchgeführt. Gleichgültig nach welchem Verfahren gearbeitet wird, bringt die
Quantisierung der Zifferanzeige bei steigender oder fallender Eingangsgröße immer erst dann einen
neuen Messwert, wenn sich diese mindestens um den Quantisierungsschritt geändert hat. Meist
interessieren kurzzeitige Messwertänderungen kaum. In den Fällen lässt sich die Abtastzeit dem
Messproblem so anpassen, dass der Informationsverlust unerheblich bleibt.
Bei der Diskussion von Messverfahren wird oft vom Ausschlag- und Kompensationsverfahren gesprochen. Kennzeichnend für das Ausschlagverfahren ist im Blockschaltbild eine gerichtete Wirkungskette. Die Messgröße kann in mehreren Stufen in die Ausgangsgröße umgeformt werden.
Jede Stufe enthält eine Normalmaßverkörperung, welche die Umsetzung der jeweiligen
Eingangsgröße in die Ausgangsgröße definiert.
Kompensationsverfahren stellen sich im Blockschaltbild als geschlossener Wirkungs- oder Regelkreis dar. Die Messgröße selbst oder eine abgeleitete Größe wird mit der Maßverkörperung direkt
verglichen. Der Abgleich ist beendet, wenn die Differenz zwischen Messgröße und Maßverkörperung unwesentlich klein geworden ist.
17
Abbildung 1.4: Ausschlagverfahren am Beispiel des Drehspulinstrumentes
Ein Beispiel für das Ausschlagverfahren ist das Drehspulinstrument (siehe Abbildung 1.4). Messgröße ist der Strom I. Das Signal „Strom I“ wird in der Spule, die sich im Magnetfeld B befindet, in
das Signal „Drehmoment MI umgeformt. Dieses Drehmoment MI wirkt auf die Messfeder und erzeugt den Messausschlag α, der als Anzeige benutzt wird. Im stationären Zustand ist das Drehmoment des Stromes MI gleich dem Richtmoment der Feder D ⋅ α. Man kann sagen, das Richtmoment
der Feder ist das Normal oder die Maßverkörperung. Ausschlagverfahren arbeiten oft ohne Hilfsenergie. Die Energie oder die Leistung, die für den Messvorgang benötigt wird, wird dem Prozess
entnommen.
Im Kompensationsverfahren (Abbildung 1.5) wird die Messgröße oder eine daraus abgeleitete
Größe mit einem Normal verglichen und die Differenz zu Null gemacht. Dieser „Nullabgleich“
kann vom Menschen oder selbsttätig von der Einrichtung bewerkstelligt werden. Ein klassisches
Beispiel ist die Waage, bei der so lange Gewichte, bzw. Normale aufgelegt werden, bis die Differenz Messgröße/Gewicht genügend klein ist.
18
Abbildung 1.5: Kompensationsverfahren am Beispiel der Waage
Zweckmäßig werden unter Kompensationsverfahren Methoden verstanden, bei denen im geschlossenen Wirkungskreis Hilfsenergiequellen existieren, die den Vergleich Messgröße/Normal erledigen. Die Hilfsenergiequellen haben daneben oft noch die Wirkung, dass die zum Durchsteuern der
Einrichtung notwendige Energie oder Leistung erheblich kleiner als bei vergleichbaren Ausschlagverfahren wird. Die Rückwirkung der Messeinrichtung auf den Prozess kann deshalb beim
Kompensationsverfahren oft vernachlässigt werden.
1.7 Messgrößen
Nichtelektrische Messgrößen
Tabelle 1.2: Messprinzipien für nichtelektrische Messgrößen
nichtelektrische Messgrößen
1. Weg (Länge, Dehnung, Füllhöhe)
eingesetzte Messprinzipien
nichtelektrische
elektrische
Messlatte
Widerstand
Schwimmer
Verdrängungskörper
Induktion
Kapazität
Druckmessung
Wägung
Ultraschall
Absorption von Strahlung
2. Winkel
Messwinkel
Widerstand
Induktion
Magnetismus
Hallsonde
Feldplatte
19
3. Kraft
Dehnungsmessung
piezoelektrischer Effekt
magnetoelastischer Effekt
4. Druck
Flüssigkeitssäulen
Kolbendruckmessung
Widerstand
Federdruckmessung
Dehnungsmessung
5. Vakuum
Temperaturmessung
Widerstand
Ionisation
7. Durchfluss
Induktion
Wirkdruck
Schwebkörperprinzip
Drehzahlmessung
8. Beschleunigung
Dehnungsmessung
9.Drehmoment
Dehnungsmessung
10. Temperatur
Flüssigkeitssäulen
Strahlung
Widerstand
Thermoelement
11. Konzentration
Maßanalyse
Wärmeleitung
Infrarotabsorption
Magnetismus
Elektrische Messgrößen
Die elektrischen Grundmessgrößen sind der Strom [A] und die Spannung [V]. Alle anderen elektrischen Größen wie z. B. der Widerstand oder die Leistung lassen sich aus der Messung der beiden
Größen ableiten.
Gleich- und Wechselgrößen
Messgrößen können unterschieden werden nach Gleich- und Wechselgrößen.
Die Gleichgrößen sind dadurch gekennzeichnet, dass ihre Augenblickswerte innerhalb des Beobachtungszeitraums zeitlich konstant sind.
Beispiele: Gleichstrom, statische Kräfte.
Wechselgrößen hingegen zeichnen sich durch zeitabhängige Beträge und sich ändernde Richtungen
aus.
Beispiele: Netzspannung 230 V, 50 Hz,
Drehmoment an der Antriebswelle eines PKW's.
Mischgrößen setzen sich aus der Überlagerung von Gleich- und Wechselgrößen zusammen.
Zur eindeutigen Beschreibung von periodischen Wechselgrößen werden einige charakterisierende
Angaben benötigt.
20
Der Augenblickswert ist ein momentaner Wert der Messgröße zum Zeitpunkt t. Der Augenblickswert einer zeitabhängigen Größe wird durch den für sie üblichen Formelbuchstaben (DIN 1304)
dargestellt. Soll die Zeitabhängigkeit hervorgehoben werden, kann dies durch ein eingeklammertes
t, z. B. U(t) oder durch die Verwendung von Kleinbuchstaben u geschehen.
U(t)
U~
Umax
USS
U=
0
t
T
Abbildung 1.6: Begriffsbestimmung bei Wechselgrößen am Beispiel eines sinusförmigen
Verlaufs
Der Scheitelwert ist der größte Betrag des Augenblickswertes und kann durch den Index max oder
durch das Zeichen ^ über dem Formelbuchstaben gekennzeichnet werden.
Der Spitze-Spitze-Wert ist der Unterschied zwischen größtem und kleinstem Augenblickswert.
Er wird durch den Index ss (Spitze-Spitze) oder pp (peak-peak) gekennzeichnet.
Mittelwerte periodisch zeitabhängiger Größen
In der Messtechnik treten häufig Mittelwertbildungen auf. Die natürliche Trägheit der Messgeräte
sorgt z. B. für eine Mittelwertbildung. Es können verschiedene Mittelwerte unterschieden werden.
Der zeitlich lineare Mittelwert ist durch die folgende Gleichung definiert:
u=
1
T
∫
T
0
U (t ) dt =
1
T
∫
T
0
u dt
(1.4)
U(t) ist der zeitliche Verlauf der Spannung und T deren Periodendauer. Zur Kennzeichnung des
zeitlich linearen Mittelwertes verwendet man einen Querstrich über dem Formelzeichen (z. B. u ).
Für periodisch zeitabhängige Wechselgrößen ist dieser Wert gleich Null, für Gleichgrößen ist er
gleich dem Augenblickswert, für Mischgrößen ist er gleich dem Gleichanteil.
21
Der Gleichrichtwert ist der zeitlich lineare Mittelwert des Betrages der Wechselgröße u:
u =
1
T
∫
T
0
u dt
(1.5)
Bei einer reinen sinusförmigen Wechselspannung u = U max ⋅ sin(ω t ) beträgt der Gleichrichtwert u :
u =
2
⋅ U max
π
(1.6)
Der Effektivwert (quadratischer Mittelwert) einer periodisch zeitabhängigen Größe kann durch den
Index eff oder durch Großbuchstaben allein, dargestellt werden.
Er ist definiert als:
ieff = I =
1 T 2
i dt
T ∫0
(1.7)
Der Effektivwert I einer periodisch abhängigen Größe I(t) ist gleich demjenigen Wert einer Gleichgröße I_ welche in der Zeit T die gleiche Wärmemenge entwickelt wie die periodische Größe. Die
Wärmemenge, die in der Zeit T erzeugt wird, ist:
periodischen Größe
∫
T
0
Gleichgröße
I 2 (t ) R dt
=
I 2 (t ) R T
I2
=
1
T
∫
T
0
I 2 (t ) dt
(1.8)
.
(1.9)
Der Effektivwert ist der praktisch wichtigste Mittelwert für alle elektrischen Wechselgrößen. Wenn
kurzerhand angegeben wird, die Netzspannung betrage 230 V, so meint man damit den Effektivwert der Wechselspannung.
Der Effektivwert einer sinusförmigen Wechselspannung u = U max ⋅ sin(ω t ) ist:
U=
1
2
U max
(1.10)
22
Weitere Literatur zur Einführung
1. DIN 1313
Apr. 1978
2. DIN 1301
Dez. 1993
3. DIN 1319
Jan. 1995
4. DIN 1319
Jan. 1985
5. DIN 1319
Feb. 1995
6. DIN 1319
Dez.. 1995
7. DIN 5483
Jun. 1983
8. DIN 5483
Sep. 1982
9. DIN 5483
Sep. 1994
10. DIN 40110
Mrz. 1985
Größensysteme und Einheitensysteme
Einheiten.
Grundbegriffe der Messtechnik, Blatt 1
Grundbegriffe der Messtechnik, Blatt 2
Grundbegriffe der Messtechnik, Blatt 3
Grundbegriffe der Messtechnik, Blatt 4
Formelzeichen für zeitabhängige Größen, Blatt 1
Formelzeichen für zeitabhängige Größen, Blatt 2
Formelzeichen für zeitabhängige Größen, Blatt 3
Wechselstromgrößen
23
2 Beschreibung des Verhaltens von Messeinrichtungen und deren
Komponenten
2.1 Messnormale
Messgröße x
Messeinrichtung
Ausgangsgröße y
Normal
Bei abgleichenden Messverfahren benötigt man zum Messen der unbekannten Größe eine genau
bekannte Vergleichsgröße, das sogenannte Messnormal. Es ist außerdem zur Eichung bzw.
Kalibrierung und zur Kontrolle der anzeigenden Messgeräte erforderlich. In der elektrischen
Messtechnik gibt es sehr genaue Normale für Spannung, Widerstand, Kapazität, Induktivität und
Frequenz.
Spannungsnormale
Klassisches Spannungsnormal Weston-Normalelement; Galvanisches Element mit zeitlich sehr
konstanter Leerlaufspannung aber geringer Belastbarkeit:
• Leerlaufspannung U0:
1,01865 V bei 20°C
• Temperaturkoeffizient αT:
4⋅10-5 / K
• maximal entnehmbarer Strom:
10 µA
• Arbeitstemperaturbereich:
+ 10 °C ÷ + 40 °C
U = U 0 (1 + α T (T − T0 ))
Eine Normale für größeren Temperaturbereich ist die
Zenerdiode im Sperrbetrieb → Zenerdiodennormal
IL
Ig
UN
Abbildung 2.1: Zenerdiodennormal (Konstante Spannung an der Zenerdiode)
24
Zenerdiode
Bei Zenerdioden ist die Durchbruchspannung genau spezifiziert. Sie werden daher zur Stabilisierung von Gleichspannungen eingesetzt. Die Z-Diode ist in Sperrrichtung parallel zum Widerstand
geschaltet. Wenn der Spannungsabfall am Widerstand die Durchbruchspannung der Z-Diode erreicht, wird die Z-Diode stromführend. Von diesem Arbeitspunkt an bleibt der Strom über den
Widerstand konstant. Strom- oder Spannungszunahmen führen zu höheren Strömen durch die ZDiode.
Widerstandsnormale
Auch die Widerstandsnormale können wie folgt unterschieden werden:
• hochgenaue Normalwiderstände (Normen-Institute)
• Gebrauchsnormale
Die hochgenauen Normalwiderstände besitzen eine Toleranz von ± 10-6. Gebrauchsnormale genügen geringeren Genauigkeitsanforderungen und werden in folgenden Ausführungen hergestellt:
Gebrauchsnormale oder Messwiderstände
10-5 Ω ÷ 106 Ω
Drahtwiderstände
10 Ω ÷ 10 Ω
Schichtwiderstände
10 Ω ÷ 10 Ω
Kohlemassewiderstände
9
7
13
} höhere Toleranzen
Die Schichtwiderstände und die Kohlemassewiderstände werden allerdings nur mit wesentlich höheren Toleranzen gebaut, als sie bei Drahtwiderständen möglich sind. Drahtwiderstände sind in den
meisten Fällen aus Manganin oder Konstantan gefertigt, deren charakteristische Daten in der
Tabelle 2.1 aufgeführt sind.
Tabelle 2.1: Drahtwiderstände aus Manganin und Konstantan
Manganin
Konstantan
86% Cu, 12% Mn, 2% Ni
54% Cu, 45% Ni, 1% Mn
0,43 Ωmm2/m
0,50 Ωmm2/m
Thermospannung gegen Kupfer
+ 1⋅10-6 V/K
- 40⋅10-6 V/K
Temperaturbeiwert des Widerstandes bei 20°C
+ 0,01⋅10-3 1/K
- 0,03⋅10-3 1/K
300°C
400°C
Zusammensetzung
Spez. Widerstand bei 20°C
Höchste Betriebstemperatur
25
Wie bei allen Widerständen ist der Widerstandswert von der Temperatur abhängig. Der funktionale
Zusammenhang zwischen Temperaturänderung und Widerstandsänderung kann für kleine Temperaturschwankungen durch die folgende lineare Näherung beschrieben werden:
R = R0 ⋅ [1 + α T ⋅ (T − T0 )]
(2.1)
R0 : Widerstand bei der Temperatur T0
R : Widerstand bei der Temperatur T
αT : Temperaturkoeffizient oder Temperaturbeiwert des verwendeten Materials
Der Temperaturbeiwert ist in der Regel ebenfalls eine Funktion der Temperatur. Diese Abhängigkeit kann durch thermische Behandlungen, z. B. Tempern beeinflusst werden. Dies wird vor allem
bei neuen Widerständen durchgeführt, um die alterungsbedingte Drift zu beschleunigen und um
mechanische Spannungen zu beseitigen. Zwei Nachteile der oben erwähnten Legierungen sind
noch zu erwähnen:
• die Korrosionsempfindlichkeit von Manganin
• die hohe Thermospannung von Konstantan gegen Kupfer
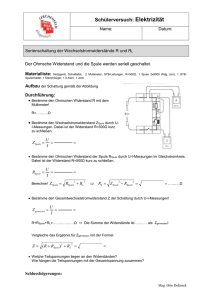
Forderungen an die Konstruktion von gewickelten Widerstandsnormalen:
1. Die Wicklung muss ohne Zugspannung aufgebracht werden, damit Gefügeveränderungen vermieden werden.
2. Gleiche Wärmeausdehnung von Wicklungskörper und Wicklung. Es dürfen bei Temperaturveränderungen keine Kräfte auf den Wicklungsdraht ausgeübt werden, da sonst ein Effekt wie
beim Dehnungsmessstreifen DMS auftritt
3. Die verwendeten Materialien müssen ein Tempern zulassen.
4. Die Wicklungen sind durch Einbettungen von der Umgebung zu isolieren. Diese Maßnahme
dient in erster Linie dem Korrosionsschutz.
5. Für die Wechselstrommesstechnik sind gewickelte Widerstände möglichst induktions- und
kapazitätsarm zu bauen.
Bei einlagiger unifilarer Wicklung, d.h. in eine Richtung gewickelte Widerstände, sind die Wicklungskapazitäten zwar minimal, jedoch ist die Induktivität relativ hoch. Aus diesem Grund sind zylindrische Wicklungskörper durch flache Formen zu ersetzen, um möglichst kleine Spulenquerschnitte zu erhalten.
26
In der Praxis wird jedoch die bifilare Wicklungsmethode vorgezogen. Die gegenläufige Wicklungsart reduziert zwar die Induktivität des Widerstandes, erhöht aber zwangsläufig die Wicklungskapazität. Die Kapazitätserhöhung bleibt bei niederohmigen Widerständen mit relativ wenigen Windungen in tolerierbaren Grenzen, so dass Widerstände bis ca. 100 Ω bifilar gewickelt werden. Präzisionswiderstände über 100 Ω werden in der Chaperon-Wicklungsart hergestellt. Bei dieser Wicklung wird die Gesamtwicklung in Gruppen zu je zwei gegenläufigen Lagen aufgeteilt.
Im einfachsten Fall lässt sich ein realer Widerstand durch die in Abbildung 2.2 gezeigte
Ersatzschaltung beschreiben.
R
L
C
Abbildung 2.2: Ersatzschaltbild eines gefertigten Widerstandes
Die Komponenten sind als die idealen Bauelemente Gleichstromwiderstand R, Induktivität L und
Kapazität C zu verstehen. Der komplexe Widerstand (Impedanz Z) errechnet sich für diese Ersatzschaltung zu:
Z=
R + jω L
1 − ω 2 L C + jω C R
(2.2)
Den Phasenwinkel ϕ, um den der Strom gegenüber der Spannung durch das Bauelement
verschoben wird, erhält man aus der Darstellung der Impedanz nach Betrag und Phase zu:
ω L(1 − ω 2 LC ) − ω CR 2
R
ϕ = arctan
(2.3)
Sollen die Widerstände bei einer Frequenz oberhalb 20 kHz eingesetzt werden, sind nur
Schichtwiderstände geeignet. Diese Widerstände werden aus Kohle oder Metallen hergestellt. Die
Bauart weist deutlich geringere Kapazitäten auf als gewickelte Widerstände.
Charakteristische Daten für diese Schichtwiderstände und Kohlemassewiderstände sind in Tabelle
2.2 angegeben.
27
Tabelle 2.2: Schicht- und Kohlemassewiderstände
Type
Kohleschicht
Metallschicht
Kohlemasse
Ausgeführte Widerstandswerte in [Ω]
10 ÷106
30÷2⋅106
108÷1012
± 0,3
± 0,1
± 0,2
- 3⋅10-4
+ 2,5⋅10-5
- 10-3
Kleinste Toleranz in [%]
Temperaturkoeffizient in [1/K]
Normalwiderstände unter 10 Ω besitzen neben den Klemmen für die Stromzuführung (S - S') zwei
weitere Klemmen, die Spannungs- und Potentialklemmen (U - U') genannt werden. Sie werden
benötigt, um Fehler durch Übergangswiderstände bei der Stromzuführung zu vermeiden. Die Übergangswiderstände rü (Abbildung 2.3) liegen in der Größenordnung von 10-2 Ω bis 10-3Ω und
verfälschen somit den Sollwert des Widerstandes.
S
I
rü
RN
rü
S'
I.RN
U
U'
Abbildung 2.3: Ersatzschaltbild eines Normalwiderstandes mit Übergangswiderständen
Durch die Potentialklemmen, die möglichst nahe an den Widerstandsenden angebracht sind, wird
dieser Fehler vermieden, da wie im Abbildung 2.3 gezeigt, die Spannung zwischen den Klemmen
U und U' genau der Spannung entspricht, die der Strom I am Normalwiderstand RN erzeugt. Der
Einfluss der Übergangswiderstände, die beim Anschluss von Spannungsmessgeräten auch an den
Potentialklemmen auftreten, muss bei der Spannungsmessung gering bleiben. Daher sollte die
Spannungsmessung mit kleiner Stromentnahme erfolgen, das heißt, es sind möglichst Spannungsmessgeräte mit hohem Eingangswiderstand zu benutzen.
Normalkapazitäten
Normalkondensatoren sollen nach Möglichkeit reine Kapazitäten sein. Ableitverluste, hervorgerufen durch den endlichen ohmschen Widerstand des Dielektrikums und dielektrische Verluste, die
sich bei hohen Frequenzen bemerkbar machen, müssen deshalb sehr klein sein. Im Ersatzschaltbild
des Kondensators (Abbildung 2.4) werden diese Verluste durch einen Parallelwiderstand Rp
dargestellt. Zur Charakterisierung der Verluste im Kondensator ist die Angabe des Verlustfaktors δ
= 1/ω CRp gebräuchlich.
28
Rp
C
Abbildung 2.4: Ersatzschaltbild eines Kondensators
In Tabelle 2.3 sind einige Daten für verschiedene Dielektrika zusammengestellt.
Tabelle 2.3: Daten einiger Kondensatorausführungen
Luft
Pressglas
Glimmer
Styroflex
Ausgeführte Kapazitätswerte in [pF]
1 ÷ 105 102 ÷ 104
103 ÷ 106
50 ÷106
Kleinste Toleranz in [%]
± 10-2
± 3 ÷10-2
± 10-1
± 10-1
tanδ für 50 Hz
> 10-5
> 0,5⋅10-3
> 0,5⋅10-3
> 0,5⋅10-3
Max. Betriebsspannung in [kV]
ca. 2
900
0,35
0,35
Normalinduktivitäten
Induktivitäten lassen sich, im Vergleich zu Kapazitäten, viel schwieriger in annähernd idealer
Weise herstellen. Aus diesem Grund ist der Einsatz von Normalinduktivitäten nach Möglichkeit zu
vermeiden (Umwandlung der Schaltung - Duale Netzwerke). Für Zwecke der Messtechnik werden
Normale zwischen 100 µH und 10 H mit einer Genauigkeit von ± 0,02% gefertigt.
Frequenznormale
Als Frequenznormale werden Quarzoszillatoren infolge ihrer hohen Qualität (104 ÷ 106) und wegen
des geringen Temperaturkoeffizienten vom Quarzresonator eingesetzt. In der Nähe der
Resonanzfrequenz kann ein Schwingquarz durch die in Abbildung 2.5 dargestellte Ersatzschaltung
beschrieben werden.
Li
Ri
Ci
C0
Abbildung 2.5: Ersatzschaltung für einen Schwingquarz
Ein Schwingquarz verhält sich wie ein elektrischer Schwingkreis mit sehr hoher Güte. Wird der
Schwingquarz durch äußere elektrische Spannungen zu mechanischen Schwingungen angeregt und
29
erreicht dabei die Schwingungsfrequenz die Eigenfrequenz des Quarzes, so gerät der Schwingquarz
in Resonanz. Diese Resonanzfrequenz ist sehr genau definiert (über Ci, Ri, Li) und äußerst konstant
(Temperaturkoeffizient sehr klein).
•
Reihenschwingkreis (bestehend aus Widerstand, Kondensator und Spule):
Güte: QR =
•
1
ω
Zk ω 0 L
=
=
= 0
R
R
ω 0 CR ∆ω
Parallelschwingkreis (bestehend aus Widerstand, Kondensator und Spule):
Güte: QP =
R
ω
Yk
=
= ω 0 CR = 0
∆ω
G ω0L
Je höher die Güte eines Schwingkreises ist, desto besser ist die Filterwirkung des Schwingkreises
im Bereich der Resonanzkreisfrequenz. Ein Schwingquarz mit einer hohen Güte schwingt mit einer
sehr geringen Frequenzabweichung mit der Resonanzkreisfrequenz ω 0. Dieses Verhalten wird
durch die folgende Abbildung 2.6 verdeutlicht, in der die Bandbreite ∆ω bezüglich der Resonanzkreisfrequenz ω 0 dargestellt ist.
|Y(ω0)|
|Y(ω0)|
√2
|Y|
∆ω
ω1 ω0 ω2
ω
GUETE.DS4, 1/1, DiSe
Abbildung 2.6: Darstellung der Güte eines Schwingkreises
Die dynamischen Ersatzgrößen Li, Ri, Ci werden nur durch den mechanisch schwingenden Resonator bestimmt, sie stellen die Gegengrößen zum mechanischen Feder-Masse-System dar. Die stati30
sche Kapazität C0 wird durch die Quarz-, die Halterungs- und die äußeren Schaltkapazitäten gebildet. Frequenznormale werden häufig in der Messtechnik verwendet, um konkrete Abtastzeiten bei
nicht kontinuierlichen Messungen zu erhalten.
Messnormale für nicht elektrische Größen
Nicht für alle nichtelektrischen Größen gibt es Normale. Im allgemeinen ist die Messung einer
Größe wie Druck, Kraft oder Massenstrom auf die Messung einer nichtelektrischen Basisgröße
zurückzuführen. Bedingt durch die Fehler, die schon in den verschiedenen Messgeräten vorhanden
sind, wird aber von vornherein die Genauigkeit elektrischer Normale nicht erreicht. Es muss
unbedingt beachtet werden, dass einige nichtelektrische Größen nicht auf Basisgrößen
zurückgeführt werden können. Die Problematik wird am Beispiel der Kalibrierung eines
Massenstrommessgerätes für Gase verdeutlicht.
Beispiel: Kalibrierung eines Massenstrommessgerätes für Gase
Der Massenstrom eines Gases kann über die Dichte und den Volumenstrom dargestellt werden als
m& = ρ ⋅ V&
ρ:
(2.4)
Dichte des Mediums
Zur Kalibrierung ist es notwendig, ρ und V& auf Basisgrößen zurückzuführen. Für ein ideales Gas
gilt:
pV = mRT
(2.5)
ρ=
m
V
(2.6)
ρ=
p
RT
(2.7)
Mit
ergibt sich
Hierbei ist R ein Gaskonstante und T die absolute Temperatur, die mit einem idealen Gasthermometer als Primärstandard gemessen werden kann.
31
Der Druck p setzt sich zusammen aus
p=
F
A
(2.8)
Er kann beispielsweise mit einer Kraft, die auf einen Kolben wirkt, auf Basisgrößen zurückgeführt
werden. Durch diese Vorgehensweise wäre es gelungen, die Dichte ρ unserer Ausgangsgleichung
auf Basisgrößen zurückzuführen. Die Bestimmung des Volumenstroms erfolgt mit einem
Durchflussmesser (Rotameter). Der Querschnitt eines Durchflussmessers sieht wie folgt aus:
Rohr
Schwebekörper
Nut
Strömungsrichtung
DURFLUME.DS4, 1/2, DiSe
Abbildung 2.7: Querschnitt eines Durchflussmessers
Er besteht aus einem senkrecht angeordneten Rohr mit drei Nuten, deren Querschnittsfläche mit
größer werdender Höhe des Rohrs größer wird. Die nach innen ragenden Teile der Nuten sind dabei
immer gleich lang und halten einen Schwebekörper in der Mitte des Zylinders. Bei der Durchströmung des Rohres wird der Schwebekörper hochgehoben, bis es zu einem mechanischen Gleichgewicht kommt. Die Kräftebilanz am Schwebekörper ist in Abbildung 2.8 dargestellt und kann mit
folgenden Gleichungen aufgestellt werden:
Auftriebskraft:
FA = VSk ρ g g
(2.9)
Gewichtskraft:
FG = VSk ρ Sk g
(2.10)
FW =
ρ g w2
(2.11)
ASk CSk
2
w ist hier die Geschwindigkeit des Gases, Csk stellt den sogenannten Widerstandsbeiwert (Cw-Wert)
des Schwebekörpers dar, der nur experimentell ermittelt werden kann.
Widerstandskraft:
32
FA FW
FG
Strömungsrichtung
Abbildung 2.8: Kräftebilanz am Schwebekörper eines Durchflussmessers
Im mechanischen Gleichgewicht ergibt sich als Kräftebilanz:
FW = FG − FA
ρw 2
2
ASk CSk = VSk g ( ρ Sk − ρ g )
(2.12)
Für den Volumenstrom gilt:
V& = w( AR − ASk )
(2.13)
Mit w aus der oben genannten Kräftebilanz ergibt sich der Volumenstrom zu:
V& =
ρ Sk − ρ g
2VSk g 1
( AR − ASk )
ρg
ASk
CSk
(2.14)
An dieser Endgleichung für den Volumenstrom wird die Problematik der verwendeten Volumenstrommessung deutlich. Die Gleichung enthält noch den Widerstandsbeiwert Csk, der nur experimentell bestimmt werden kann. Da Csk nicht auf Basisgrößen zurückgeführt werden kann, kann ein
solches Gerät durch Kalibrierung nie zu einem Primärstandard werden. Dies geht grundsätzlich nur
dann, wenn alle Größen auf Basisgrößen zurückgeführt werden können. Deshalb können das
Volumenstrommessgerät und auch unser Ausgangsgerät, der Massenstrommesser, nur zu einem Sekundärstandard durch Kalibrierung mit einem Primärstandard werden.
33
2.2 Beschreibung des statischen Verhaltens von Messeinrichtungen und deren
Komponenten
Man unterscheidet bei Messgeräten zwischen statischen und dynamischen Übertragungseigenschaften. Je nach dem, ob sich die Eingangsgröße langsam oder schnell ändert, verhalten sich
Messeinrichtungen bzw. deren Komponenten unterschiedlich. Hier wird zunächst davon ausgegangen, dass die Änderung der Eingangsgröße langsam erfolgt, so dass das Gerät folgen kann. Zu
jedem Zeitpunkt ist das System im Gleichgewicht. Dann spielen nur die statischen
Übertragungseigenschaften des Gerätes eine Rolle, welche durch die Kennlinie beschrieben
werden. Die Abhängigkeit des Ausgangssignals y von der Eingangsgröße x bezeichnet man als
Kennlinie.
Lineares Verhalten: z. B. Widerstandsthermometer
Temperatur =ˆ Messgröße x
Widerstand =ˆ Ausgangssignal y
y
4
3
1
2
x
Abbildung 2.9: Kennlinie eines Widerstandsthermometers
Zur Beschreibung der Kennlinie in Abbildung 2.9 gilt:
Bei der Temperatur T = 0°C hat das Widerstandsthermometer
bereits einen endlichen Widerstand
2 Messbereich:
Es wird meistens nur ein Teilbereich der Kennlinie benutzt
(z. B. Messgenauigkeit für kleine Widerstände zu gering)
3 Messgrenze:
Der Einsatz des Messfühlers ist bis zur Messgrenze ohne große Fehler
möglich
4 Überlastungsgrenze: Der Fühler wird bei Messgrößen oberhalb der Überlastungsgrenze zerstört
1 Nullpunkt:
34
Nichtlineares Verhalten: z. B. optischer Schichtdickenmesser
y
P
P: Proportionalitätsbereich
M: Meßbereich
F : Funktionsbereich
M
F
x
Abbildung 2.10: Kennlinie eines optischen Schichtdickenmessers
Der Messbereich liegt nach Möglichkeit im linearen Bereich der Kennlinie; wenn dies z. B. durch
die physikalischen Gegebenheiten eines Sensors nicht erfüllbar ist, können analoge oder digitale
Linearisierungsschaltungen die Kennlinie im Messbereich linearisieren.
Lineares Verhalten:
y
y0
∆y
∆x
x
Abbildung 2.11: Lineare Kennlinie
35
Beschreibung der Kennlinie:
Ansatz einer allgemeinen Geradengleichung
y = y 0 + mx
(2.15)
Häufig ist y0 = 0. Dann ist
y = mx
(2.16)
Das Anstiegsmaß m (Steigung der Kennlinie) wird als Empfindlichkeit E bezeichnet.
E=
∆y
∆x
(2.17)
Nichtlineares Verhalten:
Ein Gerät mit nichtlinearem Verhalten hat eine gekrümmte Kennlinie. Die Empfindlichkeit E ändert sich mit der Eingangsgröße x. So gilt z. B. für die Empfindlichkeit im Punkt xp:
E=
dy
dx
(2.18)
xp
y
xp
x
Abbildung 2.12: Nichtlineare Kennlinie mit der Empfindlichkeit im Punkt xp
Für die Praxis ist die Empfindlichkeit folgendermaßen definiert:
Die Empfindlichkeit ist das Verhältnis der am Messgerät beobachteten Anzeige- oder Ausgangsgrößenänderung ∆y, zu der sie verursachenden Veränderung der Messgröße ∆x:
36
E=
∆y
∆x
.
Die Empfindlichkeit kann über den Messbereich hinweg verschiedene Werte annehmen.
Bei einer Strichskala ist die Empfindlichkeit E:
E=
∆e
∆M
(2.19)
∆e: Weg auf der Strichskala in Längeneinheiten
∆M: Änderung der Messgröße (z. B. ∆T)
Bei einer digitalen Skala ist
E=
∆Z
∆M
(2.20)
∆Z: Änderung der Zahl
Diese Definitionen sind für den Messgerätebenutzer von Interesse. Der Messgerätebauer
interessiert sich für den Winkelwert W:
W=
∆M
∆α
(2.21)
∆α: Winkeländerung des Zeigers
Linearisierung:
Ersatz der Kennlinie durch ihre Tangente
Bei kleinen Messbereichen (geringe Abweichungen vom Arbeitspunkt) und bei geringen Ansprüchen an die Genauigkeit kann die Kennlinie durch ihre Tangente angenähert werden. Es entsteht
die Aufgabe, die Gleichung der Tangente im Arbeitspunkt zu finden. Dazu wird der analytische
Ausdruck für die Kennlinie um den Arbeitspunkt in einer Taylorreihe entwickelt und diese nach
dem linearen Glied abgebrochen.
Beispiel: Kennlinie eines Heißleiters
Auflösungsvermögen
Ebenfalls aus der Kennlinie ableitbar ist das Auflösungsvermögen, das eine weitere charakteristische Kenngröße darstellt. Wird eine sich stetig ändernde Eingangsgröße auch durch eine sich stetig
ändernde Ausgangsgröße wiedergegeben, ist das Auflösungsvermögen unendlich und nur durch
37
Störgrößen, wie z. B. Eigenrauschen, begrenzt. Häufig folgt das Ausgangssignal einem sich stetig
ändernden Eingangssignal nur nach ganz definierten Eingangsgrößenänderungen.
Beispiel:
Abtasten eines Strichmaßstabes (z. B. Werkzeugmaschine, A/D-Wandlung) Der Taster, der sich
kontinuierlich über den Maßstab bewegt, ruft nur dann eine Änderung der Ausgangsgröße hervor,
wenn ein Teilstrich des Maßstabes überfahren wird. Das Auflösungsvermögen dieses (Weg-) Messsystems ist demnach durch den Abstand zweier Teilstriche auf dem Maßstab gekennzeichnet.
2.3 Beschreibung des dynamischen Verhaltens von Messeinrichtungen und
deren Komponenten
Im allgemeinen stellt man an ein Messgerät die Forderung, dass es verzögerungsfrei über die Messgröße informiert. Doch das Ausgangssignal kann nicht beliebig schnell dem Eingangssignal folgen,
da in dem Messgerät
•
Reibungs-, Dämpfungswiderstände überwunden,
•
Massen beschleunigt oder abgebremst,
•
Ladungen zu- oder abgeführt,
•
Energiespeicher gefüllt oder geleert
werden müssen. Für die Beurteilung der dynamischen Eigenschaften von Messgeräten ist das zeitliche Verhalten wesentlich. Soll das Ausgangssignal y(t) als eine Funktion des sich zeitlich ändernden Eingangssignals x(t) dargestellt werden, so gehen außer den Signalen auch ihre 1. und 2.
Ableitungen nach der Zeit in die Rechnungen ein. Das heißt, um das dynamische Verhalten eines
Messgerätes zu beschreiben, ist die Differentialgleichung (DGL) zwischen dem Eingangssignal und
dem Ausgangssignal aufzustellen. Die Lösung der DGL entspricht einer Beschreibung des Systems
durch ein Modell und wird „Übertragungsfunktion“ genannt.
Zur Darstellung der dynamischen Übertragungseigenschaften wird in der Praxis, zur Anregung des
Messgerätes, häufig die „Sprungfunktion“ als Testsignal verwendet. Die entsprechende Antwortfunktion des Gerätes heißt „Sprungantwort". Die Übertragungsfunktion definiert eindeutig das
Übertragungsglied (Messeinrichtung), die Sprungantwort nicht.
2.3.1 Sprungantwort eines Messgerätes mit Verzögerung
Messgeräte, die einen Energiespeicher haben, werden durch eine Differentialgleichung 1. Ordnung
charakterisiert. Eine analytische Darstellung der Übertragungsfunktion durch Lösung der DGL,
wird in der Fehlerbetrachtung zum dynamischen Verhalten vorgestellt.
38
Beispiele für verzögerungsbehaftete Komponenten in der Messtechnik sind Temperaturfühler
(Mantel-Thermoelemente, NTC-Sensoren), elektromagnetische Übertragungsglieder (Hall-Generatoren) und auch Operationsverstärker.
x(t)
x1
0
t0
0
t0
t
y(t)
kx1
63%
t0 + Ts
Abbildung 2.13: Sprungantwort eines Messsystems
k =ˆ Übertragungsfaktor
t
mit
Verzögerung
(VZ-1-Glied)
Das dynamische Verhalten dieser Messgeräte, bzw. ihre Sprungantwort wird durch die Ersatzzeitkonstante Ts charakterisiert. Zur graphischen Ermittlung von Ts geht man nach Möglichkeit nicht
von der Anfangstangente aus, da sie nur ungenau angelegt werden kann. Zur exakten Bestimmung
von Ts betrachtet man die Stelle auf der Zeitachse, an der die Sprungantwort auf 63% ihres Endwertes angestiegen ist.
39
x(t)
x1
0
t0
0
t0
t
y(t)
kx1
t
Ts
Abbildung 2.14: Sprungantwort eines schwingungsfähigen Systems (VZ-2-Glied)
Messgeräte mit zwei gekoppelten Energiespeichern lassen sich durch eine Differentialgleichung 2.
Ordnung beschreiben. Hierzu gehören z. B. Messfühler mit Feder-Masse-Systemen (Drehspulwerk,
Beschleunigungsmesser).
Kenngrößen für das dynamische Verhalten dieser Verzögerungsglieder 2. Ordnung sind der dimensionslose Dämpfungsfaktor D und die Zeitkonstante T. Nicht alle Messgeräte lassen sich durch VZ1- oder VZ-2-Glieder beschreiben. Einige folgen nur ungefähr dem mathematischen Modell, andere
entsprechen Differentialgleichungen höherer Ordnung.
2.3.2 Sprungantwort eines Systems mit Totzeit
Abschließend soll an dieser Stelle nur noch das Verhalten von Totzeitgliedern behandelt werden.
40
x(t)
x1
0
t0
t
y(t)
kx1
0
t0
t0 + Tt
t
Abbildung 2.15: Sprungantwort eines Messgerätes mit der Totzeit Tt
Beim Totzeitglied erscheint am Ausgang das Eingangssignal unverändert, jedoch um die Totzeit Tt
verzögert.
41
3 Messfehler
Im Folgenden werden die Eingangsgröße als x und die Ausgangsgröße als y dargestellt.
3.1 Definition von Messfehlern
Bevor von Fehlern gesprochen werden kann, muss klar herausgestellt werden, welche Größe bei
einem Prozess oder Messgegenstand als Messgröße verstanden werden soll. Bei einfachen
Aufgaben wie etwa bei den Abmessungen eines Werkstückes entsteht darüber kaum eine
Diskussion. Hat aber z. B. die Messgröße auf dem Messgegenstand von Ort zu Ort verschiedene
Werte, wird man sich auf eine Messung an einer oder mehrerer Stellen als repräsentative Messorte
einigen. Für den Fall, dass ein mittlerer Wert der Messgröße gefragt ist, wird man die Messwerte
einiger weniger Stellen mitteln und diesen Wert als Ersatz für den echten Mittelwert nehmen.
Einige Beispiele: Um Überbeanspruchungen durch Wärmeausdehnung zu vermeiden, wird die
Temperatur von Dampfturbinengehäusen überwacht. Als repräsentative Messorte werden solche
ausgewählt, die bei instationären Vorgängen untereinander große Temperaturunterschiede aufweisen.
Bei der Bestimmung des Heizwertes von festen Brennstoffvorräten wird der Heizwert einer zufälligen Probe kaum interessieren. Man wird um erhebliche Fehler zu vermeiden, mehrere Proben aus
dem Brennstoffvorrat entnehmen und nach statistischen Methoden einen mittleren Heizwert des
Vorrates schätzen. Von solchen Fehlern, die durch die Messaufgabe bedingt sind, soll hier nicht
weiter die Rede sein. Zur Beurteilung einer bestimmten Messeinrichtung nehmen wir an, dass die
Messgröße mit einem bekannten Wert an der zu untersuchenden Messeinrichtung anliegt.
Die Verwendung der Vorsilben „Soll“ und „Ist“ sind in Anlehnung an die DIN 1319 Teil 3 im Bereich der Messtechnik zu vermeiden. Es sind ausschließlich die Begriffe „Richtig“ und „Falsch“,
„Messwert“ und „Anzeigewert“ zu benutzen.
Man unterscheidet zwischen:
•
systematischen Fehlern (statisch und dynamisch)
•
und zufälligen Fehlern.
Bei zufälligen Fehlern ist keine Aussage über Größe und Vorzeichen möglich; z. B. elektronisches
Rauschen oder Ableseungenauigkeit. Zufällige Fehler können durch Mittelwertbildung mehrerer
Messungen beseitigt werden.
42
Systematische Fehler können zumindest abgeschätzt werden. Die einmal festgestellte Kennlinie
(Eichung) eines Messgerätes wird auch als richtige Kennlinie bezeichnet. Bei Messungen treten
Abweichungen von der richtigen Kennlinie auf. Es ergibt sich eine von der richtigen Kennlinie
abweichende falsche Kennlinie. Die Differenz zwischen richtiger und falscher Kennlinie wird als
Fehlerkurve bezeichnet.
Falsche Kennlinie: gemessene Kennlinie nach Eliminierung der zufälligen Fehler.
Richtige Kennlinie: Kennlinie des Normals
Falsche
Kennlinie
Richtige
Kennlinie
y
Fehlerkurve
x
Abbildung 3.1: Richtige und falsche Kennlinie mit Fehlerkurve
Beispiel: Bestimmung der Leerlaufspannung U0 einer Spannungsquelle mit Innenwiderstand Ri.
Der eingesetzte Spannungsmesser entnimmt der Quelle den Strom Iv.
Damit beträgt die Klemmenspannung U k = U 0 − I v ⋅ Ri .
Definitionen zur Angabe von systematischen Fehlern sind in der DIN 1319 festgelegt.
y
Falsche
Kennlinie
yf
Richtige
Kennlinie
yr
xf
xr
Abbildung 3.2: Richtige und falsche Kennlinie
43
x
Als absoluten Fehler einer Ausgangsgröße bezeichnet man die Differenz zwischen der falschen
Ausgangsgröße und der richtigen Ausgangsgröße.
Fabs , y = y f − y r
(3.1)
wobei hier oft auch nur Beträge betrachtet werden. Entsprechend gilt für die Eingangsgröße:
Fabs = x f − xr
(3.2)
Fehler sind sowohl für das Ausgangssignal als auch für das Eingangssignal angebbar. Fehler werden am besten in den Einheiten der Messgröße angegeben (besser ∆T als ∆U bei Thermoelementen).
Bezieht man den absoluten Fehler auf einen bestimmten Wert, spricht man vom relativen Fehler:
Frel =
Fabs
⋅ 100%
x
(3.3)
Bezugswerte x:
1. Messbereichsendwert (z. B. 1% v. E.)
2. Messbereichsumfang (z. B. 1% v. U.)
3. richtiger Wert (z. B. 1% v. xr)
In Zweifelsfällen ist der Bezugswert zusammen mit dem relativen Fehler anzugeben.
a)
G
xf
b)
N
x
Gn
G
xf
xr
xr
Abbildung 3.3: Zwei Möglichkeiten, den richtigen Wert festzustellen
Als richtiger Wert kann der angezeigte Wert eines besonders zuverlässigen Messgerätes Gn
(Normal), eines Präzisionsgerätes, dienen, das etwa kurz zuvor mit einem Normal überprüft wurde
(Abbildung 3.3 a). Stehen Maßverkörperungen (Normale) zur Verfügung, wird die
Maßverkörperung als Messgröße auf die Messeinrichtung gegeben, der angezeigte Wert xa
abgelesen und als richtiger Wert xr der auf der Maßverkörperung angegebene angenommen
(Abbildung 3.3 b).
44
3.2 Fehlerursachen
Jede Messung ist fehlerhaft. Der Grund liegt in bestimmten Eigenschaften des Messgegenstandes,
in der Unvollkommenheit der Messeinrichtung und des Messverfahrens, in wechselnden
Umwelteinflüssen und in Fehlern des Beobachters.
Eine Messeinrichtung ist ein System von Baugruppen, die auf vielerlei Weise mit der Umgebung in
Verbindung sind, oder anders ausgedrückt, mit der Umgebung in Wechselwirkung stehen. Der
Ausdruck „Wechselwirkung“ impliziert, dass die Beeinflussung Umgebung /Maßeinrichtung eine
gegenseitige ist. Die Umgebung zeigt Veränderungen durch die Messeinrichtung und umgekehrt.
Bestenfalls kann die gegenseitige Beeinflussung klein gehalten werden, aber vermieden werden
können solche Einflüsse in realen Systemen nie.
Umwelt
Meßobjekt
Meßgerät
Meßwertverarbeitung
Hilfsenergie
Abbildung 3.4: Rückwirkungen des Messgerätes
Wechselwirkung zwischen Messobjekt und Messgerät:
Eine Messung ist stets mit Energie- und Informationsfluss zwischen Messobjekt und Messgerät
verbunden. Rückwirkungen des Messgerätes auf das Messobjekt, der Messwertverarbeitung auf das
Messgerät oder des Messgerätes auf die Hilfsenergie sollten vermieden werden.
Ein wichtiger Fehler, der von Anfängern oft übersehen wird, ist der Fehler, der durch die Wechselwirkung Messeinrichtung/Prozess über die Messgröße selbst entsteht. Jede Messeinrichtung
braucht für den Messvorgang Energie oder Leistung, die dem Prozess entzogen wird. Der Wert der
Messgröße im Prozess mit angeschlossener Messeinrichtung unterscheidet sich von dem Wert, der
ohne Messeinrichtung erreicht worden wäre. Die Größe dieses Fehlers hängt davon ab, welche
Messgrößenänderung der Energieaustausch im Prozess hervorruft. Die Fachleute nennen diesen
Fehler Rückwirkung der Messeinrichtung auf den Prozess oder den Messgegenstand. Die
45
Wechselwirkung Prozess/Messeinrichtung begründet auch die Notwendigkeit den Begriff
„Messsystem“ zu verwenden.
Beispiel: Kaltes Thermometer im Topf mit heißem Wasser
Energie fließt aus dem Wasser auf das Thermometer
⇒ Thermometer wird wärmer
⇒ Wasser wird kälter
⇒ Temperaturausgleich
⇒ Messgröße wird verfälscht
Rückwirkung des Messgeräts auf das Messobjekt
Außer der Messgröße stehen zahlreiche Größen aus der Umwelt mit der Messeinrichtung in
Wechselwirkung. Solche Störgrößen sind etwa Fremdfeldeinstreuungen, die Umgebungstemperatur, die Luftfeuchtigkeit, Erschütterungen und Vibrationen des Fundaments, Staub, korrosive Gase
und dgl. Zur Beschreibung der Messeinrichtung gehört die Angabe des Einflusses dieser Störgrößen als Fehler.
Neben diesen „äußeren Störgrößen“ unterscheidet der Praktiker noch „innere Störgrößen“. Es handelt sich dabei um über lange Zeiträume verlaufende Vorgänge, die vor der Beobachtungszeit durch
Wechselwirkung mit der Umwelt hervorgerufen wurden. Auch wenn man die Messeinrichtung
vollständig von der Umgebung abschirmen könnte, würden diese inneren Störgrößen noch
Auswirkungen auf die Anzeige bewirken. Dazu zwei Beispiele:
Viele Geräte enthalten als Maßverkörperung eine Messfeder (Drehspulinstrument, Federwaage).
Durch die Fertigung der Feder, durch die Messvorgänge vor dem Beobachtungszeitpunkt sind Vorgänge im Federmaterial ausgelöst worden, die sich später in der Anzeige bemerkbar machen.
Im Sprachgebrauch wird dies als „Alterung“ der Feder bezeichnet.
Bei der Herstellung von photoelektrischen Bauelementen (Fotokathodenröhren) werden Wirkungen
auf das Bauelement eingeleitet, die sich auch später im Betrieb z. B. als geringer werdende Empfindlichkeit zeigen.
An der Schnittstelle „Messeinrichtung/Empfänger“ tritt wie bei der Schnittstelle
„Prozess/Messeinrichtung“ eine Wechselwirkung auf. Die Empfängereigenschaften beeinflussen
den Wert der Ausgangsgröße. Bei anzeigenden Messeinrichtungen ist dieser Fehler unmerklich
klein. Der Empfänger „das Auge“ hat praktisch keinen Einfluss auf die Anzeige.
Die letzte Fehlerquelle ist der Beobachter selbst. Falsche Bedienung und Ablesefehler sind die
wesentlichen Fehlerursachen. Von einer idealen Messeinrichtung wird verlangt, dass sich unter den
46
vielen Einflussgrößen allein die Messgröße in der Ausgangsgröße abbildet. Dies ist nach dem oben
Gesagten unmöglich. Es leuchtet damit ein, dass zur Beschreibung der Eigenschaften einer
Messeinrichtung die Aufzählung vieler einzelner Fehler - das sind die Auswirkungen der einzelnen
Einflussgrößen - unerlässlich ist.
3.3 Statische Fehler
Zur technischen Beschreibung einer Messeinrichtung gehören viele Angaben wie etwa
Messbereich, Abmessungen, Einbauvorschriften, Energieversorgung, Betriebsbedingungen und
dgl.. Sehr wichtig sind Angaben über die Fehler, die einen Vergleich mit ähnlichen Geräten
ermöglichen und die sicherste Auskunft über die Güte des Gerätes geben.
Die Grundaufgabe der Messtechnik ist es, eine stationäre Messgröße zu erfassen. Die Länge eines
Werkstückes ändert sich z. B. während der Messzeit nicht. Die sich im eingeschwungenen Zustand
einstellenden Fehler werden als statische Fehler bezeichnet.
Bei vielen Messaufgaben werden aber zeitlich dicht aufeinanderfolgende Messwerte benötigt. Ein
Beispiel dafür ist etwa der Druckverlauf im Zylinder eines Verbrennungsmotors. Nur sehr viele
oder kontinuierliche Messungen geben Aufschluss über das Ansaugen, Komprimieren, Zünden und
Ausblasen. Das Signal der Messeinrichtung soll der Messgröße verzögerungslos folgen.
Abweichungen werden als dynamische Fehler bezeichnet.
Fehler können auch nach ihrer Ursache eingeteilt werden. Bei der Beurteilung einer Messeinrichtung allein wird man die Fehler, die abhängig vom Prozess und dem Empfänger sind, als nicht spezifisch für die Messeinrichtung und ebenso die Fehler durch den Beobachter weglassen und allein
Fehler nach inneren und äußeren Störgrößen unterscheiden.
Man unterscheidet Fehler unter Normalbedingungen, bei denen die Umwelteinflüsse weitgehend
ausgeschaltet sind und Fehler bei Abweichungen von den Normalbedingungen, bei denen diese im
einzelnen untersucht werden.
Wir erhalten damit als Kennwerte zur Beurteilung einer Messeinrichtung folgende Fehler: Statische
Fehler unter Normalbedingungen werden für stationäre Messgrößen bei eingeschwungener
Messeinrichtung ermittelt. Die Störgrößen der Umgebung sind dabei unverändert konstant oder auf
Null zu halten. Als Normalbedingungen gelten die Bedingungen, wie sie sich im Prüffeld befinden
(z. B. T= 0°C; p = 1,01325 bar).
Statische Fehler bei Abweichungen von Normalbedingungen werden für stationäre Messgrößen bei
eingeschwungener Messeinrichtung ermittelt. Für jede wichtige Störgröße ist eine definierte
47
Abweichung von den Normalbedingungen herzustellen und die Auswirkung auf die Ausgangsgröße
als Fehler festzustellen.
Dynamische Fehler werden mit Hilfe von zeitlich veränderlichen Testsignalen der Messgröße festgestellt. Üblich ist als Testsignal die Sprungfunktion. Die Versuche finden unter Normalbedingungen statt.
Dynamische Fehler ändern sich im allgemeinen bei Abweichungen von den Normalbedingungen
nur wenig. Es ist deshalb ausreichend, die dynamischen Fehler allein unter Normalbedingungen
festzustellen.
Der Leser erkennt, dass die Beschreibung einer Messeinrichtung eine sehr aufwendige, langwierige
und umfangreiche Aufgabe ist. Alle diese Kennwerte genügen jedoch nicht, das Verhalten einer
Messeinrichtung vollständig zu beschreiben. Es bleibt ein Rest von Fehlern, die dem Beobachter
als zufällig erscheinen.
3.3.1 Statische Fehler unter Normalbedingungen
Die Normalbedingungen sind zweckmäßig zu definieren. Man wird dazu die im Untersuchungsraum vorliegenden Bedingungen nehmen und die Störgrößen wie Temperatur, Feuchte und dgl.
konstant, andere wie z. B. Fremdfelder und Vibrationen fernhalten. Vor der Untersuchung muss die
Messeinrichtung für die vorgesehene Aufgabe tauglich gemacht werden, sie wird „justiert“ oder
„abgeglichen“.
Unter Justieren oder Abgleichen versteht man einen Eingriff in das Gerät oder seine Maßverkörperung mit dem Ziel, den Messbereich auf den vorgesehenen Bereich der Ausgabeeinrichtung, des
Ausgangssignals oder der Anzeige abzubilden.
Beispiel: Eine digitale Temperaturanzeige soll etwa im Messbereich 20 ÷ 100°C auf einen Messbe-
reich von 0 ÷ 100% gebracht werden.
Beispiel: Das Ausgangssignal eines elektrischen Druckmessumformers, Messbereich 0 ÷ 1 bar, soll
zwischen 4 und 20 mA liegen. Eine vorhandene Skala eines Zeigerinstrumentes soll auf möglichst
kleine Fehler justiert werden.
Vom Justieren oder Abgleichen zu unterscheiden ist das Eichen und Kalibrieren. Das Eichen ist
eine gesetzliche Maßnahme, das durch eine Prüfbehörde erfolgt. Das Kalibrieren erfolgt vor Ort
häufig durch Vergleich mit Sekundärstandards. Messgeräte haben meistens mindestens zwei Möglichkeiten für einen Justiereingriff, nämlich die Möglichkeit, den Messbereich zu verschieben und
ihn größer oder kleiner zu machen. Beim Drehspulinstrument z. B. ist die Fesselung der Messfeder
48
als Nullpunktrücker ausgebildet, ein Parallelwiderstand zur Drehspule dient zur Veränderung des
Messbereiches.
Im folgenden werden einige Arten systematischer Fehler vorgestellt:
• Kalibrier- und Abgleichfehler
Abgleichfehler: Unrichtiges Einstellen der für den Abgleich vorgesehenen Justierelemente eine
Messgerätes
a) Nullpunktsabgleichfehler
b) Übersetzungsfehler, Verstärkung
Kalibrierfehler: Benutzung einer falschen „richtigen Kennlinie“ (z. B. Einflussgröße nicht gleich
groß wie im Kalibrierexperiment)
Kalibrierfehler
y
Richtige
Kennlinie
Nullpunktsabgleichsfehler
Übersetzungsfehler
Verstärkungsfehler
x
Abbildung 3.5: Kalibrier- und Abgleichfehler
Zur Justierung der Kennlinie sind zwei Verfahren üblich: Bei der Fixpunktjustierung wird Messanfang und Messende mit dem vorgesehenen Anfangs- und Endwert des Ausgangssignals vollständig
zur Deckung gebracht. Im Messanfang und Messende ist damit der Fehler Null.
Bei der Toleranzbandjustierung wird die Kennlinie so justiert, dass der größte Fehler im
Messbereich möglichst klein wird. Der Fehler wird im Vergleich zur Fixpunktjustierung auf die
Hälfte reduziert.
49
Fixpunkteinstellung
Toleranzbandeinstellung
ye
ye
y
y
ya
ya
xa
xa
xe
x
xe
x
Abbildung 3.6: Fixpunkt- und Toleranzbandjustierung
In der Praxis wird der Fixpunktjustierung der Vorzug gegeben, weil die Justierung erheblich weniger arbeitsaufwendig ist.
•
Fehler durch irreversible Änderungen (irreversibel =ˆ nicht umkehrbar)
y
x
Abbildung 3.7: Fehlerkurve durch irreversible Änderungen
Ursachen:
Grundsatz:
•
Alterung der Werkstoffe, plastische Verformung, chemische Umsetzungen, (innere
Störgrößen).
Messgeräte sollen möglichst frei sein von bleibenden Umwandlungen infolge der
Einwirkung von Mess- und Einflussgrößen. Ein hochwertiges Messgerät hat eine
hohe Reproduzierbarkeit.
Fehler durch reversible Änderungen (z. B. Hysterese magnetischer Werkstoffe)
50
Werden für dieselbe Eingangsgröße unterschiedliche Ausgangsgrößen ermittelt, und zwar abhängig
davon, ob die Eingangsgröße nach fallender oder steigender Eingangsgröße bestimmt wurde, besitzt das Messgerät eine Hysterese oder Umkehrspanne.
Zur Feststellung der Hysterese wird die Messgröße langsam vom Messanfang bis zum Messende
gesteigert und wieder langsam auf den Messanfang zurückgenommen. Die größte dabei auftretende
Differenz H der Kennlinie wird auf die Messspanne bezogen und als Hysterese h angegeben:
h=
H
⋅100%
xe − x a
(3.4)
Die Umkehrspanne wird ähnlich wie die Hysterese ermittelt. Die Messgröße wird aber dazu nur um
einige wenige Prozent geändert. Der größte Fehler U zwischen Auf- und Abwärtsgang wird auf die
Messspanne bezogen und als Umkehrspanne u angegeben.
u=
U
⋅ 100%
xe − x a
(3.5)
Hysterese
Reibung
ye
y
Umkehrspanne
H
y
Lose
ya
U
xa
x
xe
x
Abbildung 3.8: Hysterese und Umkehrspanne
Beide Erscheinungen können viele Ursachen haben. Eine Umkehrspanne ist immer dann vorhanden, wenn im Messsystem Hemmungen existieren, die es hindern, bei stationärer Messgröße den
Gleichgewichtszustand einzunehmen. Solche Hemmungen sind z. B. mechanische Reibung und
Lose. Im Bild sind Umkehrspannen durch Reibung und Lose eingezeichnet. Bei Reibung ändert
sich die Anzeige sprunghaft, wenn die größere Haftreibung überwunden wird.
Existiert eine Umkehrspanne, wird man auch eine Hysterese messen. Das gleiche gilt nicht umgekehrt. Oft wird Hysterese durch innere Störgrößen hervorgerufen, wie z. B. durch die elastische
51
Nachwirkung von Messfedern. Die Größe der Hystereseschleife ist in solchen Fällen abhängig von
der Größe und der Dauer der Belastung, sie verschwindet für kleine Messgrößenänderungen.
• Mangelnde zeitliche Konstanz
Hält man die Eingangsgröße eines Messgerätes konstant, so verändert sich trotzdem oft im Laufe
der Zeit die Ausgangsgröße. Das Messgerät driftet.
Kurzzeitdrift:
z. B. durch Temperatureinflüsse
Langzeitdrift:
z. B. durch Alterung
Nullpunktdrift:
Verschiebung des Nullpunktes
Übersetzungsdrift: Verdrehung der Kennlinie
3.3.2 Statische Fehler bei Abweichungen von Normalbedingungen
Hier wird die Wirkung der vielen Störgrößen aus der Umgebung auf die Messeinrichtung beschrieben. Beispiele für solche Störgrößen sind: die Temperatur, der Temperaturgradient, die Feuchte,
mechanische Erschütterungen, Stöße, Überlastung weit über den Messbereich hinaus, Änderungen
der Hilfsenergie, der Bürde und dgl..
Bei diesen Untersuchungen wird die Messgröße auf konstantem Wert gehalten, die interessierenden
Störgrößen systematisch nacheinander geändert und die Wirkung auf die Ausgangsgröße im Beharrungszustand beschrieben.
Nach ihrer Wirkung auf die Messeinrichtung lassen sich superponierende und deformierende Störgrößen unterscheiden. Superponierende Störgrößen bewirken im Ausgang der Messeinrichtung
ein zusätzliches Störsignal, das sich dem Messsignal überlagert. Deformierende Störgrößen verändern das Übertragungsverhalten der Messeinrichtung.
y
y
Zi1
ye1-ye0
Zi0
Zi1
ye0-ya0
Zi0
y1-y0
xa
x
ya1-ya0
xa
xe
x
xe
Abbildung 3.9: Superponierende und deformierende Fehler
Bei den superponierenden Störgrößen wirkt die Störgröße wie ein zusätzliches Messsignal. Solche
Störeinflüsse können mit einer einzigen Messung erfasst werden, z. B. am Messanfang. Der
52
Messwert wird konstant gehalten. Ist beim Normalwert der Störgröße zi0 der Messwert y0, bei einer
Abweichung mit dem Wert der Störgröße zi1 der Messwert y1, gibt man als Fehler die Differenz
beider Messwerte bezogen auf die Ausgangsspanne und die Störgrößenänderung ∆z i = z i1 − z i 0 an.
Fsup =
y1 − y 0
( xe − xa )∆z i
.
(3.6)
Meist reicht es bei deformierenden Störgrößen aus, die mittlere relative Empfindlichkeitsänderung
bezogen auf die Störgrößenänderung ∆zi anzugeben:
Fd =
E − E0
∆E
= i
E0 ⋅ ∆z i E0 ⋅ ∆z i
.
(3.7)
Dazu wird die mittlere Empfindlichkeit bei Normalbedingungen gebildet:
E0 =
ye 0 − y a 0
xe − x a
.
(3.8)
Ebenso die mittlere Empfindlichkeit nach einer Änderung der Störgröße von zi0 auf zi1:
E1 =
ye1 − ya1
xe − x a
.
(3.9)
Für den deformierenden Fehler Fd gilt mit diesen Beziehungen:
Fd =
E1 − E0
E0
⋅
( y − y a1 ) − ( y e 0 − y a 0 ) 1 ( y e1 − y e0 ) − ( y a1 − y a 0 ) 1
1
⋅
⋅
=
= e1
ye0 − y a0
ye0 − y a0
∆z i
∆z i
∆z i
(3.10)
Man erkennt in (3.10) dass für superponierende Störgrößen Fd gleich Null ist. In dem Fall ist für
beliebige Werte i, j des Ausgangssignals yi1 − yi 0 = y j1 − y j 0 .
Ein klassisches Beispiel für eine superponierende Störgröße ist die Einstreuung einer fremden
Wechselspannung in die Signalleitung. Eine Temperaturänderung kann dagegen deformierend auf
eine Messfeder wirken, wenn sich der die Kennlinie bestimmende Elastizitätsmodul mit der
Temperatur ändert.
53
3.4 Dynamische Fehler
Bei der Beschreibung des dynamischen Verhaltens von Messgeräten in Kapitel 2.3 sind die Übertragungseigenschaften verschiedener Messgeräte vorgestellt worden. Als Testsignal wurde beispielhaft eine Sprungfunktion auf den Eingang x(t) des Messgerätes gelegt. Der Vollständigkeit halber
werden noch weitere mögliche anregende Funktionen mit ihren entsprechenden Antwortfunktionen
genannt:
anregende Funktionen:
Sprungfunktion
Sinusfunktion
Stoßfunktion
Antwortfunktion:
Sprungantwort /
Übergangsfunktion
Sinusantwort;
Amplituden- und Phasengang,
Frequenzgang
Stoßantwort /
Gewichtsfunktion
Diese Funktionen können jeweils als gleichwertige Testsignale angesehen werden, um das Zeitverhalten eines Messgerätes zu charakterisieren.
Im Experiment könnte man eine Sprungfunktion auf ein Messgerät wie folgt realisieren:
•
Thermoelement ins Wasser fallen lassen,
•
Drucksprung durch einen Schalter
54
p1
p2
Normal
Schalter
N
Testgerät
2-Kanal
Schreiber
Abbildung 3.10: Drucksprungmessung an einem Testgerät
Hierbei müssen folgende Bedingungen eingehalten werden:
•
die Schaltzeit für die Messgröße muss um eine Größenordnung kleiner sein als die
Einstellzeit des Testgerätes
•
die Schreibereinstellzeit muss ebenfalls erheblich kleiner sein als die Schaltzeit
Zur Beschreibung des dynamischen Verhaltens eines Messgerätes ist die Differentialgleichung zwischen Eingangs- und Ausgangssignal notwendig. Die höchste Ableitung des Ausgangssignals bestimmt die Ordnung der beschreibenden DGL.
Verzögerungsglied 1. Ordnung
Beispiel: Eintauchen eines Thermoelements in Eiswasser
Um das dynamische Verhalten eines Messgerätes zu verdeutlichen, wird ein Thermoelement, das
sich in Luft bei Raumtemperatur befindet, in Eiswasser eingetaucht. Die Messung der Temperatur
des Wassers mittels des Thermoelements erfolgt dynamisch, da das Messgerät zeitverzögert auf die
geänderten Temperaturverhältnisse in der unmittelbaren Umgebung des Thermoelements reagiert.
Durch den Temperaturunterschied findet ein Wärmefluss statt, bei dem sich die Temperatur des
Thermoelements an die Temperatur des Eiswassers anpasst.
Dieser Wärmefluss ist durch folgende Beziehung gekennzeichnet:
55
dQ = c p m∆ϑ
(3.11)
dQ =ˆ Wärmemenge
c p =ˆ spezifische Wärmekapazität
m =ˆ Masse der Perle
ϑ =ˆ Temperatur der Perle
ϑ f =ˆ Temperatur des Fluids
α
=ˆ Wärmeübergangskoeffizient
A =ˆ Übergangsfläche
Der Wärmetransport zwischen der Oberfläche eines festen Körpers und einem relativ zu ihr
bewegten strömenden Medium wird Wärmeübergang genannt. Für den hierbei auftretenden
Wärmestrom gilt nach Newton:
dQ
dQ
dϑ
Q& =
= αA(ϑ f − ϑ ) bzw.
= cpm
.
dt
dt
dt
(3.12)
Gleichsetzen der beiden Gleichungen ergibt:
cpm
⇒
dϑ
= αA(ϑ f − ϑ )
dt
αAϑ + c p m
(3.13)
dϑ
= αAϑ f
dt
(3.14)
Nach Einführung von Konstanten folgt:
⇒
a 0ϑ
+
a1ϑ& = e0ϑ f
(3.15)
Diese Beziehung lässt sich durch die Substitution x := ϑ f und y := ϑ allgemein ausdrücken:
⇒
a0 y +
a1 y& = e0 x .
(3.16)
Für ein Messgerät mit einem Energiespeicher, ein VZ-1-Glied, gilt demnach folgende
Differentialgleichung:
a0 y + a1 y& = e0 x
(3.17)
56
a0, a1 und e0 sind konstante Koeffizienten.
Division durch a0:
y+
e
a1
y& = 0 x
a0
a0
(3.18)
Im stationären Fall ( y& = 0 für t → ∞ ) gilt:
y=
e0
x
a0
(3.19)
wobei k = e0 / a0 der Empfindlichkeit entspricht (s. Gl. 2.17).
Aus Gl. (3.18) folgt, dass der Koeffizient a1 / a0 die Einheit einer Zeit haben muss .
a1
=T
a0
(3.20)
T =ˆ Zeitkonstante
Einsetzen der Gl. (3.19) und Gl. (3.20) in Gl. (3.18):
y + Ty& = kx
(3.21)
Für die homogene Differentialgleichung
y + Ty& = 0
gilt:
t
y h (t ) = C ⋅ exp −
T
(3.22)
mit C als Integrationskonstanten.
Die partikuläre Lösung im stationären Fall ( y& = 0 ) lautet:
y p = kx .
(3.23)
Da das Messgerät als ein lineares System angenommen wird, setzt sich die vollständige Lösung aus
der Summe der Gl. (3.22) und (3.23) zusammen:
57
t
y (t ) = y h + y p = kx + C exp −
T
(3.24)
Für die Integrationskonstante C folgt aus den Anfangsbedingungen:
y(t=0) = 0
C = -kx
Somit gilt:
t
y (t ) = kx ⋅ 1 − exp − .
T
(3.25)
Beispiel: Auf den Eingang eines Messgerätes wird eine Sprungfunktion gegeben.
Eingangssignal:
x=0
für
t≤0
x = x1
für
t>0
Ausgangssignal:
t
y (t ) = kx1 ⋅ 1 − exp −
T
y(t)
kx1
0.63 kx1
0
t/T
1
Abbildung 3.11: Sprungfunktion mit Sprungantwort
Übertragungsfunktion:
y (t )
t
= k ⋅ 1 − exp −
x
T
(3.26)
Vergleich mit Gl. 3.13 und Resubstitution ergibt:
α A
⋅ t
c
m
p
ϑ (t ) = ϑ f 1 − exp −
58
⇒
αA
cpm
=
1
T
Vorteil: Unabhängig vom zeitlichen Verlauf der Eingangsgröße x.
63% des Grenzwertes sind nach einer, 95% nach drei und 99,5% nach fünf Zeitkonstanten erreicht.
Verzögerungsglied 2. Ordnung
Messgeräte mit zwei gekoppelten Energiespeichern, VZ-2-Glieder, lassen sich durch Differentialgleichungen 2. Ordnung beschreiben:
a0 y + a1 y& + a2 &y& = e0 x
(3.27)
a0, a1, a2 und e0 sind konstante Koeffizienten.
Division durch a0:
y+
e
a1
a
y& + 2 &y& = 0 x
a0
a0
a0
(3.28)
Beharrungszustand:
y& = 0
&y& = 0
e
y = 0x
a0
k = e0 / a0 entspricht der Empfindlichkeit.
a2
= T2
a0
(3.29)
a1
= 2 DT
a0
(3.30)
D =ˆ Dämpfungsfaktor
Die partikuläre Lösung im stationären Fall ( y& = 0 ) lautet:
y p = kx .
Zur Lösung der homogenen Differentialgleichung
y + 2 DTy& + T 2 &y& = 0
Mit der charakteristischen Gleichung
1 + 2 DTr + T 2 r 2 = 0
und den Eigenwerten
59
D 1
±
D2 −1
T T
wird eine Fallunterscheidung notwendig. Je nach Dämpfungsfaktor D gilt:
r1, 2 = −
0 ≤ D < 1 r1 und r2 konjugiert komplexes Zahlenpaar
D>1
D=1
r1 und r2 reelle Zahlen
r1 = r2 ; reell
Hier soll zunächst der aperiodische Grenzfall D = 1 betrachtet werden:
1
T
Lösung der homogenen Differentialgleichung:
r1 = r2 = −
t
t
y h (t ) = C1 exp − + C 2 t exp −
T
T
(3.31)
Vollständige Lösung:
t
t
y (t ) = kx + C1 exp − + C 2t exp −
T
T
Anfangsbedingungen:
y(t=0)
=
0
C1
=
-kx
y& (t = 0)
=
0
C2
=
− kx
⇒
⇒
1
T
y(t)
kx
D=0,3
D=0,7
1
D=1
D=3
0
Abbildung 3.12:
t/T
Einschwingvorgang
Dämpfungsfaktoren
eines
60
idealen
Messgerätes
für
verschiedene
Somit gilt im Falle D = 1 :
t
t t
y (t ) = kx ⋅ 1 − exp − − exp −
T
T T
(3.32)
T +t
t
= kx ⋅ 1 −
exp −
T
T
Bei einem Dämpfungsfaktor D = 1 wird einerseits das Schwingen, andererseits auch das allzu langsame Heranstreichen an den Beharrungswert vermieden. Diesen Vorgang bezeichnet man als
„aperiodischen Grenzfall“. In der Praxis wird im allgemeinen D ≅ 0,7 gewählt. Hierbei treten zwar
noch tolerierbare Überschwingungen auf, aber die Einstellung des Endwertes erfolgt schneller.
Sprungantwort im periodischen (d. h. schwingenden) Fall 0 ≤ D < 1:
D
Dt
sin(ω d t )
y (t ) = kx ⋅ 1 − exp −
⋅ cos(ω d t ) +
T
1− D2
(3.33)
mit der Eigenfrequenz des gedämpften Systems
ωd =
y(t)
T1
kx1
0
1
1− D2
T
t0
Toleranzband
yü
t
τ
Abbildung 3.13: Sprungantwort eines Messsystems bei einer schwingenden Einstellung
T1 =ˆ Zeit die vergeht, bis der stationäre Wert zum ersten Mal erreicht wird.
τ =ˆ Zeit die vergeht, bis ein Toleranzband von z. B. 1%der Sprunghöhe nicht mehr verlassen
wird.
yü =ˆ maximale Überschwingweite
ym =ˆ maximale Überschwingweite, angegeben in Prozent der Sprunghöhe.
61
ym =
yü
⋅100%
kx1
Viele Messeinrichtungen, die statisch eine gute Kennlinie haben, erweisen sich bei dynamischen
Messungen als stark nichtlinear. Eine Messeinrichtung zeigt ein lineares Verhalten, wenn dem kfachen Testsignal zu jedem Zeitpunkt auch das k-fache Ausgangssignal entspricht.
Sprungantwort im aperiodischen Fall D > 1:
t
t
T1
T2
exp − +
exp −
y (t ) = kx ⋅ 1 −
T1 T2 − T1
T2
T1 − T2
(3.34)
mit
T1 =
T2 =
T
D − D2 −1
T
D + D2 −1
T1 entspricht der Zeitkonstanten eines Verzögerungsgliedes 1. Ordnung. T2 stellt ein weiteres nachgeschaltetes Verzögerungsglied dar.
y(t)
Ts
Wendetangente
kx1
0
t
t0
Tt
Abbildung 3.14: Sprungantwort eines realen Messsystems bei einer aperiodischen Einstellung
62
Ts =ˆ Ersatz-Zeitkonstante
Zeit zwischen den Schnittpunkten der Wendetangente mit der Null-Linie und dem stationären
Wert.
Tt =ˆ Ersatz-Totzeit
Verzugszeit zwischen dem Sprungeinsatz und dem Schnittpunkt der Wendetangente mit der
Null-Linie.
Weitere Fälle:
Sprungantwort eines Messgerätes mit der Totzeit Tt:
y (t ) = 0
für t < t 0 + Tt
y (t ) = kx1
für t ≥ t 0 + Tt
(3.35)
x(t)
x1
0
t0
0
t0
t
y(t)
kx1
t0 + Tt
t
Abbildung 3.15: Sprungantwort eines Messgerätes mit der Totzeit Tt
3.4.1 Graphische Ermittlung der Übertragungsfunktion
Die Übertragungsfunktion ist das Verhältnis von der Ausgangsgröße y zur Messgröße x in Abhängigkeit von der Zeit. Sie erlaubt eine vergleichende Beurteilung des dynamischen Verhaltens, auch
wenn sich die Messgröße nicht ideal sprunghaft ändert. In dem Beispiel zur graphischen Ermittlung
(Bild 3.16) wurde die Sprungantwort eines VZ-2-Gliedes mit der Dämpfungskonstante D = 1
(aperiodisches System) gewählt.
63
Legt man im Punkt der größten Steigung der Sprungantwort eine Tangente an, so bestimmt der
Schnittpunkt dieser Tangente mit der Abszisse die Ersatztotzeit Tt. Die Ersatzzeitkonstante Ts ist
gegeben durch den Schnittpunkt dieser Tangente mit der Zeitachse und der Asymptote der Übertragungsfunktion. Beide Ersatzzeiten sind Beurteilungsgrößen für das dynamische Verhalten.
x
Meßgröße
t
t=0
y
Ausgangssignal
t=0
t
Übertragungsfunktion
y
x
t=0
t
TS
Tt
Abbildung 3.16: Ermittlung der Übertragungsfunktion (reales, aperiodisches System)
3.5 Begrenzung dynamischer Fehler
Die Zeitkonstanten und Grenzfrequenzen der Messgeräte müssen zu den Änderungsgeschwindigkeiten der Messgrößen passen. Dabei dürfen eventuell vorhandene Oberwellen nicht vergessen
werden. Der Arbeitsbereich der Messgeräte liegt zwischen einer unteren und oberen
Grenzfrequenz. Die untere Grenzfrequenz kann Null oder von Null verschieden sein.
64
1. untere
für Gleich- und Wechselgrößen geeignet
Grenzfrequenz = 0:
2. untere
Grenzfrequenz ≠ 0:
nur für Wechselgrößen geeignet (z. B. piezoelektrischer Kraftaufnehmer)
Fehler bei Abtast- und Haltegliedern (Sample and Hold)
Zur Umwandlung analoger Signale in digitale wird vor dem A/D-Wandler häufig ein Abtast- und
Halteglied verwendet. Durch das Abtasten und Halten entsteht aus einem kontinuierlich verlaufenden Signal eine Art Treppenkurve. In der Zeit, in der ein abgetasteter Messwert gehalten wird, kann
sich die analoge Funktion weiterentwickeln. Der umgesetzte Wert weicht von dem aktuellen ab und
die Differenz bedeutet einen Messfehler, der nicht zu groß werden darf. Er hängt von der Änderungsgeschwindigkeit des Signals und der Abtastrate ab.
a)
y(t)
F
b)
Ta
t
F
t
Abbildung 3.17: a) Originalfunktion, b) abgetastete Funktion, Fehlerverlauf
Angenommen wird ein sinusförmiges Messsignal y(t) mit dem Scheitelwert ŷ , das sich mit der
Kreisfrequenz ω ändert,
y (t ) = yˆ sin(ωt ) = yˆ sin( 2π f t ) .
Für die Änderungsgeschwindigkeit dy/dt gilt:
65
(3.36)
dy
= yˆω cos(ωt ) = yˆ 2πf cos(2π f t )
dt
(3.37)
mit ihren Extrema bei cos(ω t) = ±1.
dy
dt
= y& max = yˆ ω
(3.38)
max
In der Zeit Ta zwischen zwei Abtastungen ändert sich damit das Signal maximal um F,
F ≤ yˆωTa .
(3.39)
Wird das abgetastete Signal in ein n Bit enthaltendes Digitalwort umgesetzt, so ist der
Quantisierungsfehler ∆q (besser Quantisierungsstufe).
∆q =
Messbereich 2 yˆ
= n
2n
2
.
(3.40)
Soll sich das Messsignal zwischen zwei Abtastungen um höchstens 1 Bit ändern, so darf sich das
Messsignal in dieser Zeit um höchstens ∆q ändern. Diese Forderung führt zu dem Ansatz
∆q
F
≤
yˆωTa
≤
Ta
≤
fa
≥ ω 2(n-1) = 2π f 2(n-1) = 2nπ f
2 yˆ
2n
1
ω 2 ( n −1)
Die Abtastfrequenz fa = 1/Ta muss größergleich der (π⋅2n)-fachen Signalfrequenz f sein.
Beispiel: Bei einer Auflösung von 8 bit müsste die Abtastfrequenz mindestens das (π⋅28 =) 804-
Fache der Signalfrequenz betragen.
3.6 Zufällige Fehler
Messfehler lassen sich in systematische und zufällige Fehler einteilen. Erhält man bei wiederholten
Messungen das gleiche Ergebnis, spricht man von systematischen Fehlern, bei voneinander im Betrag und Vorzeichen abweichenden Messwerten von zufälligen Fehlern.
66
Die Fehler einer Messreihe können, abhängig vom Standpunkt des Beobachters oder den Versuchsbedingungen, zu den zufälligen oder zu den systematischen Fehlern zählen. Dies macht man sich
am besten an einigen Beispielen klar:
•
Ein Spannungsmesser werde an ein Spannungsnormal angeschlossen und im
Laboratorium über den Tag verteilt mehrere Messungen durchgeführt. Die Ergebnisse der
Messungen unterscheiden sich im Betrag und im Vorzeichen. Es treten also zufällige
Fehler auf.
•
Eine eingehende Untersuchung lässt vermuten, dass ein Zusammenhang zwischen den Ergebnissen und den Temperaturänderungen besteht. Die Versuche werden im Temperaturschrank mit verschiedenen Temperaturen wiederholt, ebenso werden die Messungen im
Laboratorium bei gleichzeitiger Registrierung der Temperatur noch einmal durchgeführt.
Es zeigt sich, dass die Fehler eindeutig von der Raumtemperatur abhängen. Es sind jetzt
systematische Fehler.
Beide Beispiele lassen etwas Grundsätzliches erkennen: Mit verfeinerten Versuchsbedingungen
und besserer Systemkenntnis werden immer mehr zufällige Fehler zu systematischen. Das Standardbeispiel der Wahrscheinlichkeitsrechnung für ein zufälliges Ereignis, das Würfeln, braucht
grundsätzlich kein zufälliges Ereignis zu sein. Ist die Geschwindigkeit, die Richtung, der Drehimpuls des Würfelns beim Wurf bekannt, lässt sich das Ergebnis nach den Gesetzen der Mechanik
berechnen. Der Aufwand, die Versuchsbedingungen festzulegen, ist in diesem Fall aber sehr hoch.
Im folgenden Beispiel soll nun dargestellt werden, in welcher Weise die Fehlereinteilung vom
Standpunkt des Beobachters abhängen kann.
•
Die Untersuchung soll Aufschluss über die Temperaturfehler von Spannungsmessern geben, die in einer Fertigung produziert werden. Dazu werden nach dem oben genannten
Beispiel die einzelnen Geräte der Produktion in einem Temperaturschrank untersucht und
die Temperaturfehler festgestellt. Zeigen sich von Exemplar zu Exemplar abweichende
Ergebnisse, wird man von zufälligen Fehlern sprechen. Fehler, die in dem oben genannten
Beispiel als systematisch eingeteilt wurden, werden hier im Zusammenhang mit einer anderen Aufgabe zu zufälligen Fehlern.
Bei empfindlichen analogen Messverfahren werden auch bei vollkommener Systemkenntnis und
sehr verfeinerten Versuchsbedingungen von Messung zu Messung Schwankungserscheinungen
beobachtet, die grundsätzlicher Art sind. Diese Erscheinungen, die den zufälligen Fehlern zuzurechnen sind, werden als „Rauschen“ bezeichnet. Die Ursache für das Rauschen liegt in der kor67
puskularen Natur der Materie und der Energie. Die Materie ist aus Molekülen und Atomen aufgebaut, Energie wird nach den Erkenntnissen der Quantentheorie nur in diskreten Portionen, den
Quanten, übertragen.
Jedes reale System, auch eine Messeinrichtung, steht mit der Umwelt in Wechselwirkung. Es wird
in jedem Augenblick Energie oder auch Materie transportiert oder ausgetauscht. Wegen des korpuskularen Charakters geht dies nur unter Schwankungserscheinungen vor sich. Grundsätzlich wirken sich diese Schwankungserscheinungen auch auf das Messsignal aus und sind dort mit empfindlichen Messprinzipien nachweisbar.
Manche Messgrößen sind streng genommen keine determinierten Größen. Der Druck eines Gases
z. B. ist die mittlere zeitliche Impulsänderung der auf die Messmembran aufprallenden
Gasmoleküle. Es ist klar, dass sich diese Reaktionskraft „Druck“ in jedem Augenblick ändert. Mit
Kondensatormikrophonen ist dies unschwer nachzuweisen.
3.6.1 Bestimmung zufälliger Fehler
Einen einmal gemessenen, zufälligen Fehler anzugeben, ist sinnlos. Bei der nächsten Messung ist
ein anderes Ergebnis zu erwarten. Zur Beurteilung von zufälligen Fehlern wird man mehrere Messungen heranziehen müssen.
xr
x
xi
x
a)
t
T1
xi
x x
r
b)
T1
x
t
Abbildung 3.18: Beispiele für kontinuierlich registrierte Messwerte bei konstanter
Messgröße und gleichbleibenden Versuchsbedingungen
Hier wird angenommen, dass die Messgröße ihren Wert in der Versuchszeit nicht ändert und die
Anzeige laufend registriert wird oder fortlaufend in diskreten Zeitpunkten die Messwerte x abgelesen werden. Zwei Beispiele zeigt der Registrierstreifen in Abbildung 3.18. Die Versuchsbedingun68
gen werden während der Versuchszeit konstant gehalten, der „Charakter“ der Fehler bleibt in dieser
Zeit gleich.
Wie nun die Messungen auszuwerten sind und wie der zufällige Fehler anzugeben ist, wird im folgenden beschrieben.
3.6.2 Mittelwert, Schätzwert und Standardabweichung
Betrag und Vorzeichen nicht vorhersehbarer Fehler können im einzelnen nicht angegeben werden.
Aus den Messwerten wird der mittlere Wert der Messgröße x in der Versuchszeit T gebildet. In
der Praxis ist nur eine begrenzte Anzahl n von Messungen durchführbar. Der daraus berechnete
Mittelwert x ist dann nur ein Schätzwert x̂ .
x=
1 n
⋅ ∑ xi = xˆ
n i =1
für n < ∞
(3.41)
Die Differenz zum richtigen Wert xr wird als systematischer Fehler bezeichnet.
Fs = x − xr
(3.42)
Der zufällige Fehler wird durch die Streubreite um den mittleren Wert x charakterisiert. Dazu
kann ein Histogramm dienen.
Polygon durch
Klassenmitte
h
h=
∆x
ν∆x
( ν+1 )+∆x
nν
n∆x
x
Abbildung 3.19: Beispiel für ein Histogramm
Ein Histogramm oder eine Häufigkeitsverteilungsdichte erhält man, indem man die Messwerte xi
nicht nach ihrer zeitlichen Reihenfolge wie beim Registrieren ordnet, sondern Klassen der Breite
∆x bildet und feststellt, wie viele Messwerte nν, z. B. in die Klasse
69
[ν∆x; (ν + 1)∆x[
fallen. Als Abszisse trägt man den Messwert ν ∆x, als Ordinate die relative Häufigkeitsdichte
hv =
nν
n∆x
auf. Die Gesamtzahl der Messungen beträgt n = ∑ nν .
Der in Klassen eingeteilte Bereich von x sollte alle Messwerte umfassen. Die Klassenbreite ∆x ist
so zu wählen, dass der Polygonzug durch die Klassenmitte eine einigermaßen glatte Kurve gibt
(Abbildung 3.19).
Für jedes Histogramm ist die Fläche A zwischen Kurve und Abszisse A = 1. Es gilt für die Treppenkurve, die flächengleich mit dem Polygonzug ist:
A = ∆x ⋅ ∑
ν
nν
∑ nν = 1
=
n∆x
n
(3.43)
Wäre im Idealfall eine unendliche Anzahl von Messungen möglich, könnte das Ergebnis durch eine
Mittelwertbildung vollständig vom Zufall befreit werden, so dass gälte:
x=
1 n
⋅ ∑ xi = x r
n i =1
für n → ∞
(3.44)
Dann ist:
n
∑ (x
i =1
i
− xr ) = 0
i
− x r ) 2 = minimal .
und
n
∑ (x
i =1
Als Maß für die Streuung der Werte dient die Varianz σ2:
σ2 =
1 n
⋅ ∑ ( xi − x r ) 2 für n → ∞
n i =1
Die positive Quadratwurzel der Varianz wird Standardabweichung σ genannt.
70
(3.45)
Ein Schätzwert σ̂ für σ kann nach Gl. (3.45) nicht bestimmt werden, da der wahre Wert xr nicht
bekannt ist. Man kann nur mit dem Schätzwert x̂ aus Gl. (3.41) rechnen. In diesem Fall wird ein
erwartungstreuer, unverzerrter Schätzwert der Standardabweichung s erhalten, wenn die Summe
der Abstandsquadrate nicht durch n, sondern nur noch durch die Zahl der Vergleichsmessungen n-1
geteilt wird. Schätzwert der Varianz:
s2 =
n
n
1
1
⋅ ∑ ( xi − xˆ ) 2 =
⋅ ∑ ( xi − x ) 2
n − 1 i =1
n − 1 i =1
für n > 1
(3.46)
Standardabweichung s und Varianz s2 der Stichprobe sind von großer praktischer Bedeutung. Ist
z. B. die Standardabweichung aus früheren Versuchen oder aus Versuchen mit ähnlichen Anordnungen bekannt, kann man, auch wenn nur eine einzige aktuelle Messung vorliegt, auf die Unsicherheit dieser Messung aufgrund der bekannten Standardabweichung schließen.
Alle in Abbildung 3.18 registrierten Messwerte haben etwa die gleiche Varianz. Doch unterscheidet
sich der Fall a) erheblich von Fall b). Bei b) ist ein Messwert xi in gewisser Weise vom vorhergehenden abhängig. Man sagt die aufeinanderfolgenden Werte sind miteinander korreliert oder statistisch abhängig. Das Signal hat eine „Erhaltungstendenz“, der Messwert ändert sich von Messung zu
Messung nicht sehr stark.
Die Norm schreibt für die Auswertung von Messwerten vor, dass nur voneinander unabhängige
Messwerte verwendet werden sollen. Dies lässt sich nicht immer mit Sicherheit erreichen. Im Fall
abhängiger Messungen bringt die Verwendung von Gl. (3.41) und Gl. (3.46) unsicherere Ergebnisse. Steht z. B. in Abbildung 3.18 die Messzeit T1 zur Verfügung, so wird im Fall b) der
Mittelwert x erheblich zu hoch, die Varianz s2 viel zu klein ermittelt.
3.6.3 Der zufällige Fehler in der Wahrscheinlichkeitsrechnung
Ein Mittel, zufällige Ereignisse zu beschreiben, ist in der Wahrscheinlichkeitsrechnung die Dichte
der Wahrscheinlichkeitsverteilung p(x). Der Ausdruck p ( x) ⋅ ∆x ist die Wahrscheinlichkeit, dass
die zufällige Größe X im Bereich [x; x + ∆x] liegt. Wahrscheinlichkeitsdichten können in
Einzelfällen aus den Versuchsbedingungen hergeleitet werden; öfter kann der Typ der Verteilung
angegeben werden. Die für die Verteilung wichtigen Parameter müssen dann aus Stichproben
experimentell bestimmt werden. Für die grundsätzlichen Überlegungen wird angenommen, dass die
Dichte explizit bekannt ist.
Die Verbindung der Theorie zum Experiment geschieht über verschiedene Grenzwertsätze, z. B.
über das Bernoullische Gesetz der großen Zahlen. Versuchsergebnisse, ermittelt aus großen Stich71
proben, unterscheiden sich mit Sicherheit nur um ein Geringes von den Ergebnissen nach der
Wahrscheinlichkeitsrechnung.
Ein einfaches Beispiel: Das Histogramm geht mit wachsendem Stichprobenumfang in die Dichte
der Wahrscheinlichkeitsverteilung über.
Ist die Dichte der Verteilung p(x) gegeben, lässt sich der Mittelwert µ der Messgröße x leicht
errechnen. Der Messwert ist eine stochastische Größe, die viele Werte annehmen kann. Betrachten
wir den Wertebereich bei x, [x…X…x + ∆x], so ist die Wahrscheinlichkeit, dass der Messwert in
diesem Bereich liegt p(x)⋅∆x, und der Beitrag zum Mittelwert ergibt x⋅p(x)⋅∆x. Der Mittelwert µ,
bzw. der Erwartungswert E{x} für alle Werte der Messgröße errechnet sich, wenn die Summe durch
ein Integral ersetzt wird, zu:
µ = E{x} = ∫ x ⋅ p( x)dx
(3.47)
Es wird nun angenommen, dass dieser Mittelwert µ das bestmögliche Messergebnis darstellt, das
mit Hilfe der Messeinrichtung überhaupt gewonnen werden kann.
Wie kommt man zu dieser Annahme?
Im Eingang zu Kapitel 3.6 ist gezeigt worden, dass manche Messgrößen bei genauerer Betrachtung
keine determinierten Größen sind, sondern, wie der Druck auf das Kondensatormikrophon, als
Mittelwerte anzusehen sind. Oder: man nimmt an, dass dem Signal a, welches die Messeinrichtung
liefert, ein stochastisches Störsignal z überlagert ist. Für das Störsignal wird man erwarten dürfen,
dass sich positive und negative Fehler im Mittel aufheben, d.h.
x=a+z
E{z} = 0 = ∫ z p ( z ) dz = ∫ ( x − a ) p ( x − a ) d ( x − a ) = µ − a
(3.48)
Ist dem Ausgangssignal der Messeinrichtung ein Störsignal mit dem Mittelwert Null überlagert, so
ist das Messergebnis der Mittelwert oder der Erwartungswert des Signals.
Die Voraussetzung liegt oft nicht vor. Ist z. B. das Eingangssignal der Messeinrichtung von einem
starken Störsignal überlagert, und hat das Gerät eine Kennlinie, die gekrümmt ist, tritt im Ausgangssignal ein Fehler auf, dessen Mittelwert nicht zu Null wird. Bei Rauschuntersuchungen wird
im allgemeinen der Pegel des Störsignals so niedrig sein, dass die Kennlinie im beanspruchten Bereich immer als linear gelten kann. Auch kann durch Mittelung kein systematischer Fehler eliminiert werden. Ein systematischer Fehler wird, gleichgültig wie oft gemessen wird, im Mittel nie zu
72
Null (vgl. Gl. (3.42)). Solche Fehler können nur durch Prüfen mit einem Normal oder einem Präzisionsinstrument festgestellt werden.
In Gl. (3.47) erkennt man, dass der Mittelwert der Messgröße durch die Dichte der Verteilung
gegeben ist. Umgekehrt ist natürlich die Verteilung durch verschiedene Mittelwerte bestimmt. Zur
Kennzeichnung der Verteilung reichen hier zwei Mittelwerte aus.
1. Das erste Moment oder der Schwerpunkt µ der Verteilung ist definiert durch
µ = E{x} = ∫ x ⋅ p( x)dx
(3.49)
2. Die Varianz oder das Zentralmoment 2. Ordnung σ2 ist definiert durch
σ 2 = E{( x − µ ) 2 } = ∫ ( x − µ ) 2 p( x)dx
(3.50)
σ2
p(x)
(x-µ)2
p(x)
(x-µ)2 p(x)
µ
x
Abbildung 3.20: Mittelwert und Varianz einer stochastischen Variablen x
Der Begriff „Schwerpunkt“ macht anschaulich, wo sich die Größe im Mittel befinden wird. Die
Varianz gibt einen Anhalt über die Breite der Dichte (Abbildung 3.20). Die schraffierte Fläche
stellt die Varianz der Variablen x dar.
Jetzt ist noch die Frage zu beantworten, wie sicher eine einzelne Messung ist. Dazu muss der Begriff „Statistische Sicherheit“ eingeführt werden. Die Statistische Sicherheit P(c) gibt die Wahrscheinlichkeit in Prozent an, mit welcher der Messwert im Toleranzband µ - cσ… µ + cσ liegt:
P(c) = P{ x − µ < cσ } ⋅100%
73
(3.51)
Ist die Dichte bekannt, errechnet sich P(c) zu:
P (c ) = ∫
µ + cσ
µ − cσ
p ( x)dx ⋅100%
(3.52)
Waren genügend viele und von einander unabhängige Einflussgrößen wirksam und wurden genügend viele Einzelmessungen durchgeführt, so sind die Messwerte normalverteilt. Die Normal- oder
Gaußsche Verteilung kommt in der Messtechnik sehr häufig vor. Ihre Dichte ist gegeben durch:
( x − µ )2
1
p ( x) =
⋅ exp−
2σ 2
σ 2π
(3.53)
Hierbei beschreibt µ den Mittelwert oder Schwerpunkt der Verteilung.
68,3%
p(x)
95,5%
µ-2σ
µ
µ-σ
µ+σ
µ+2σ
x
Abbildung 3.21: Gaußsche Verteilung
Bei einer normierten Darstellung gibt die Fläche unter der Kurve die Wahrscheinlichkeit für das
Auftreten eines Wertes in einem bestimmten Bereich an. Die Gesamtfläche unter der Kurve ist
dann gleich eins. Der Einfluss der Parameter µ und σ2 auf Lage und Gestalt der durch Gl. (3.53)
gegebenen Kurve erkennt man in Abbildung 3.21; die Kurve verläuft symmetrisch zu der durch
x = µ gegebenen Geraden, sie besitzt an den Stellen µ - σ und µ + σ Wendepunkte und hat bei
x = µ ein Maximum mit dem Funktionswert
1
σ 2π
.
74
Stellt sich nun das Problem wie groß die Wahrscheinlichkeit P für das Auftreten eines Messwertes
im Bereich µ - cσ…µ + cσ ist, so ergibt sich die Lösung aus der Integration der Normalverteilung
zwischen µ - cσ…µ + cσ :
P
µ + cσ
=
∫µ
=
µ + cσ
(x − µ)2
2
⋅∫
exp −
dx
2σ 2
σ 2π µ
− cσ
p ( x)dx
(3.54)
Lösung des Integrals über Substitution:
t=
x−µ
σ 2
dx = σ 2 dt
⇒
mit x − µ = ε = cσ eingesetzt in die Integrationsgrenzen gilt:
tε =
ε
σ 2
=
c
2
Damit folgt:
P(t ε ) =
2
π
tε
[ ]
⋅ ∫ exp − t 2 dt = erf (t ε )
0
(3.55)
Dieses Integral wird als Fehlerintegral bezeichnet und ist in tabellierter oder graphischer Form in
der Literatur zu finden.
100
(%)
80
70
60
P( tε ) 50
40
30
20
10
0
0
0,5
1,0
Abbildung 3.22: Gaußsches Fehlerintegral
75
1,5
c
2,0
2,5
3,0
Damit kann man auch formulieren, dass mit einer 50%igen Wahrscheinlichkeit der einzelne
Messwert im Bereich µ ± 0,675σ liegt.
50,0% liegen im Bereich µ ± 0,675σ
68,3% liegen im Bereich µ ± σ
95,5% liegen im Bereich µ ± 2σ
99,7% liegen im Bereich µ ± 3σ
Die Standardabweichung ist ein Maß für die Messunsicherheit. In Verbindung mit der gewünschten
Wahrscheinlichkeit wird man die Messunsicherheit als cσ angeben, wobei das Vielfache c der
Standardabweichung aus dem Kurvenverlauf in Abbildung 3.22 entnommen wird.
3.6.4 Kovarianz
Im Abschnitt 3.6.2 war von der „Erhaltungstendenz“ eines Signals die Rede (Abbildung 3.18).
Gemeint war dort offenbar, dass ein Signalwert x(t) zur Zeit t sich bis zur Zeit t + T nicht allzu sehr
ändert, also x = x(t) ≈ x(t + T) ist. Dieser Sachverhalt lässt sich in der Wahrscheinlichkeitsrechnung
durch die Kovarianzfunktion beschreiben. Die Kovarianzfunktion K zweier stochastischer Größen
u und v mit dem Mittelwert E{u} = E{v} = µ ist gegeben durch:
K u ,v (T ) = E{(u − µ )(v − µ )} = ∫∫ (u − µ )(v −µ ) p (u , v;T )dudv
(3.56)
und ist ein Maß dafür, wie zwei Zufallsgrößen u und v voneinander abhängen. u und v werden als
unkorreliert bezeichnet, wenn
K u ,v (T ) = 0
ist.
p(u, v ;T) ist die Dichte der Verbundwahrscheinlichkeit der beiden Variablen u und v nach der Zeit
T.
Aus der Wahrscheinlichkeitsrechnung ist das Theorem von Bayes bekannt. Danach lässt sich die
Verbundwahrscheinlichkeit p(u, v) aufspalten in eine Marginalwahrscheinlichkeit p(u) und eine
bedingte Wahrscheinlichkeit p(v/u):
p (u , v) = p (u ) ⋅ p (v / u ) = p (v) ⋅ p (u / v) .
76
Die bedingte Wahrscheinlichkeit p(v/u)∆v beschreibt die Wahrscheinlichkeit, mit der das Signal zur
Zeit t + T im Bereich [v; v + ∆v] liegt, wenn zur Zeit t der Signalwert u = u(t) anliegt. Auf die
Berechnung von bedingten Wahrscheinlichkeiten wird hier nicht eingegangen, es lohnt aber, sich
den Verlauf dieser Dichten anschaulich klar zu machen. Dies illustriert Abbildung 3.23 anhand von
Signalen mit großer und kleiner Erhaltungstendenz (siehe Abbildung 3.18).
große
Erhaltungstendenz
u,υ
u,υ
T
u
υ
u
u
T
u=µ
t
p(υ/u)
p(υ/u)
u
p(υ/u)
u
p(υ/u)
kleine
Erhaltungstendenz
u,υ
u
T
u
u=µ
u
υ
t
u
p(υ/u)
p(υ/u)
p(υ/u)
u
p(υ/u)
Abbildung 3.23: Signale mit großer und kleiner Erhaltungstendenz und einige Dichten der
bedingten Wahrscheinlichkeit
Bei Signalen mit großer Erhaltungstendenz wird der Signalwert v = u(t + T) überwiegend in der
Nähe der Bedingung u = u(t) liegen. Die bedingte Wahrscheinlichkeit p(v/u) wird demnach ihren
Schwerpunkt in der Nähe der Bedingung u haben. Die Dichte der bedingten Wahrscheinlichkeit
p(v/u) wird schmal und spitz und sehr abhängig von der Lage der Bedingung u sein.
Bei Signalen mit kleiner Erhaltungstendenz werden die Signalwerte v = u(t + T) fast unabhängig
von der Bedingung u = u(t) sein und sich eben um den Mittelwert µ gruppieren. Zwei Extremfälle
sind denkbar:
1. Der Signalwert v ist starr an den Wert von u gebunden, und nach einem Wert u tritt immer ein
Wert v = u. Die bedingte Wahrscheinlichkeitsdichte geht dann in die Impulsfunktion über:
p (v / u ) = δ (v − u ) .
77
2. Die Größen v und u sind voneinander unabhängig. Dann ist die bedingte Wahrscheinlichkeit
unabhängig von der Bedingung u und es gilt:
p (v / u ) = p (v ) .
Man erhält damit und mit Gl. (3.56) die Extremwerte für Ku,v(T).
zu 1.:
K u ,v (T ) = ∫∫ (u − µ)(v − µ)δ (v − u ) p (u )dudv
= ∫ (u − µ) 2 p (u )du
(3.57)
=σ2
zu 2.:
K u ,v (T ) = ∫∫ (u − µ)(v − µ) p (u ) p (v)dudv
= ∫ (u − µ ) p (v)du ⋅ ∫ (v − µ) p (v)dv
(3.58)
=0
Die Kovarianzfunktion der Größen u = u(t) und v = u(t + T) liegt im Bereich
K u ,v (T ) ≤ σ 2
Über die Rolle des Parameters T in der Kovarianzfunktion muss noch gesprochen werden: Bei
einem registrierten Signal u(t) hängt der Wert der Kovarianzfunktion offensichtlich von der Wahl
von T ab. Wähle ich T groß, haben auch im Registrierstreifen b) aus Abbildung 3.18 die Werte x(t)
und x(t + T) nichts miteinander zu tun, die Erhaltungstendenz ist auch dann gering. Wähle ich T
sehr klein, ε > T > 0, ε → 0, ist sowohl im Streifen a) als auch b) in Abbildung 3.18 die
Erhaltungstendenz stark. Die Erhaltungstendenz dient bei gegebenem T dem Vergleich verschiedener Signale untereinander! Offen ist noch die Frage, wie man in der Praxis zu dem Mittelwert
und der Varianz kommt, oder wie der Zusammenhang der Stichprobenmittelwerte mit denen aus
der Verteilung ist.
3.6.5 Mittelwerte aus der Stichprobe und der Verteilung
Wir haben vorausgesetzt, dass unser Messvorgang stationär abläuft. Die einzelnen Messwerte, die
zum Stichprobenmittelwert addiert werden, sind zufällige Größen. Gehören alle Werte xi aus der
Stichprobe, die zu verschiedenen Zeitpunkten genommen worden sind, zu einer Verteilung oder
78
Grundgesamtheit - in der Statistik nennt man einen solchen Prozess ergodisch -, lässt sich der
Erwartungswert von x̂ berechnen. Es gilt mit Gl. (3.41):
1 n 1 n
1 n
1
E{xˆ} = E ∑ xi = ∑ E{xi } = ∑ µ = ⋅ n ⋅ µ = µ
n i =1
n
n i =1 n i =1
(3.59)
Man sagt, die Schätzung x̂ von µ ist „erwartungstreu“.
Wie ändert sich nun die Varianz von x̂ mit zunehmendem Stichprobenumfang? Die Rechnung
ergibt:
σ x̂2
1 n
1 n
2
= E ( xˆ − µ ) = E{( xˆ − µ )( xˆ − µ )} = E ∑ xi − µ ∑ x j − µ
n i =1
n j =1
{
}
1 n
1 n
1 n
= E ∑ ( xi − µ ) ∑ (x j − µ ) = E 2 ∑ [( xi − µ )(x j − µ )]
n j =1
n i =1
n i , j =1
=
1
n
2
n
∑ E{(xi − µ )(x j − µ )} =
i , j =1
1
n
2
(3.60)
n
∑K
i , j =1
xi x j
1. Bei starrer Bindung von xi und xj gilt:
2
K xi x j = σ
σ x2ˆ =
1
n
2
n
∑K
i , j =1
xi x j
=
1
n
2
n
∑σ
2
=
i , j =1
1
n
2
⋅ n2 σ 2 = σ 2
2. Bei statistischer Unabhängigkeit von xi und xj gilt:
2
K xi x j = σ
für i = j bzw. T = 0
K xi x j = 0
für i ≠ j
n
1 n 2 n 1 n 2 1
1 n
1 n
σ2
σ = 2 ∑ K xi x j = 2 ∑ K xi x j + ∑ K xi x j = 2 ∑σ + ∑ 0 = 2 ∑σ = 2 nσ 2 =
n i , j =1
n i , j =1
n i =1
n
n
i , j =1
i , j =1
n ii =, jj=1
i≠ j
i≠ j
i= j
2
xˆ
σ2
n
(3.61)
→ 0 für n → ∞
Bei unabhängigen Messungen strebt mit größer werdender Stichprobe der Stichprobenmittelwert
gegen den Mittelwert der Verteilung. Die Varianz des Stichprobenmittelwertes geht dabei gegen
Null. In der Statistik sagt man, die Schätzung x̂ von µ ist konsistent oder x̂ geht im Mittel gegen µ
und schreibt hierfür lim x̂ = µ.
79
Es gilt der Satz:
Der Stichprobenmittelwert x̂ Gl. (3.41) geht mit wachsendem Stichprobenumfang gegen den Mittelwert µ, wenn die einzelnen Messungen xi voneinander unabhängig sind. Weiter wird in der Statistik gezeigt, dass der Stichprobenmittelwert die beste lineare Rechenvorschrift für µ ist und dass
bei Normalverteilung des Fehlers der Stichprobenmittelwert x̂ optimal zur Bestimmung von µ ist.
Wie ist nun der Zusammenhang zwischen der Varianz der Stichprobe E{s 2} und der Varianz aus
der Verteilung σ? Mit Gl. (3.46) und Gl. (3.58) erhält man:
E{s 2} =
n
n
1
1
2
2
E ∑ ( xi − xˆ ) =
E ∑ [( xi − µ ) + (µ − xˆ )]
n − 1 i =1
n − 1 i =1
=
n
n
n
1
2
2
E ∑ ( xi − µ ) + 2∑ [( xi − µ )(µ − xˆ )] + ∑ (µ − xˆ )
n − 1 i =1
i =1
i =1
Es folgt mit Gl. (3.41):
n
j =1
n
1
1
µ − xˆ = − ∑ x j + µ = − ∑ (x j − µ )
n
n
j =1
und damit
E{s 2} =
n
1
1 n
2
E ∑ (xi − µ ) − ∑ [( xi − µ )(x j − µ )] .
n − 1 i =1
n i , j =1
n
Für unabhängige Messungen xi und xj gilt
∑ [(x − µ )(x
i
i , j =1
E{s 2} =
j
− µ )] = 0 und daher:
1
[nσ 2 − 0] = n σ 2 .
n −1
n −1
Für unabhängige Messwerte xi gibt die Stichprobenvarianz eine erwartungstreue Rechenvorschrift
für die Varianz an. In der Statistik wird gezeigt, dass die Stichprobenvarianz mit größer werdender
Stichprobe im Mittel gegen die Varianz geht: lim s2 = σ 2. Sind die Messwerte voneinander abhängig, wird die Varianz durch die Stichprobenvarianz zu klein geschätzt.
Der wichtige Punkt „Unabhängigkeit der Messwerte“ wurde eingehend behandelt, weil in der
Praxis sehr oft leichtfertig damit umgegangen wird. Ein Beispiel soll darauf noch einmal
hinweisen:
80
Ein Messgerät zeigt im Prüffeld eine sehr geringe Stichprobenvarianz, in der verfahrenstechnischen
Anlage dagegen liegt die Stichprobenvarianz erheblich höher. Der Grund dafür kann beispielsweise
in einem Temperaturfehler liegen, der sich bei der gleichbleibenden Temperatur im Prüffeld nicht
auswirkt. Die Messwerte sind im Prüffeld nicht voneinander unabhängig. In der Anlage dagegen
wirken sich die durch Tageszeiten und Wetter bedingten Temperaturschwankungen, die zufälligen
Charakter haben, voll auf das Messergebnis aus.
81
4 Fehlerfortpflanzung
4.1 Fehlerfortpflanzung der systematischen Messfehler
Nur im einfachsten Fall ist der Messwert das Messergebnis. Hier sollen nun Messergebnisse y und
ihre Fehler untersucht werden. Die Größe y sei der direkten Messung nicht zugänglich. Sie ist aber
eine bekannte Funktion der messbaren und mit den Fehlern ∆xi behafteten Größen xi;i=1,…,n.
y = f ( x1 , x2 ..., xn )
(4.1)
Wo kommt es vor, dass das Ergebnis von mehreren Messwerten xi abhängig ist? Zum Beispiel bei
der Dichte ρ=f(T,p) oder dem Wirkungsgrad eines Dampferzeugers. Dieser wird durch den Heizwert und den Durchfluss des Brennstoffes sowie durch die Dampftemperatur und den Druck in vielen Einzelmessungen bestimmt.
Die Einzelfehler ∆xi führen zu einem Gesamtfehler ∆y, der berechnet werden soll. ∆y wird angesetzt als Differenz zwischen dem fehlerbehafteten und fehlerfreien, „richtigen“ Funktionswert.
∆y = y − y r
= f ( x1 + ∆x1 , x2 + ∆x2 ,... xn + ∆xn ) − f ( x1 , x2 .... xn )
(4.2)
Mit Hilfe der nach dem linearen Glied abgebrochenen Taylorreihe der Funktion y lässt sich die Differenz ∆y aus den partiellen Ableitungen und den als klein angenommenen Änderungen ∆xi berechnen: (also ∆xi << xi ;
∆xi sind vorzeichenbehaftet)
∆y =
∂f
∂f
∆x1 + ...
∆x n
∂x1
∂x n
∂f
=∑
∆x i
i =1 ∂x i
(4.3)
n
für
∆xi << xi
In diese Gleichung sind die Einzelfehler ∆xi mit ihren Vorzeichen einzusetzen und der fehlerbehaftete Messwert ist entsprechend zu korrigieren.
y r = y − ∆y
(4.4)
Beispiele:
1. Ist die zu berechnende Größe y z. B. eine Linearkombination der gemessenen Größen xi,
82
y = a1 x1 + a2 x2 + ...an xn
so ist
∆y = a1∆x1 + a2 ∆x2 + ... + an ∆xn
Der absolute Gesamtfehler ∆y ist also die Summe der mit den Koeffizienten ai multiplizierten
absoluten Einzelfehler ∆xi.
2. Multiplikation:
y = a1 x1α1 ⋅ a2 x2α 2 ...an xnα n
n
= ∏ ai ⋅ xiα i
i =1
Partielle Ableitung von y nach x1 ist
∂y
= α 1a1 x1α1 −1 ⋅ a2 x2α 2 ...a n xαn n
∂x1
= y⋅
α1
x1
Allgemein wird für die xi erhalten:
α
∂y
= y⋅ i
∂xi
xi
(4.5)
n
∆x
∆y = y ∑ α i i
xi
i =1
(4.6)
Mit Gl. (4.3) gilt:
oder
∆y n ∆xi
= ∑ α i
y
xi
i =1
Der relative Gesamtfehler ∆y/y ergibt sich also als Summe der mit den Exponenten αi multiplizierten relativen Einzelfehler. In allen anderen Fällen wird entsprechend Gl. (4.3) verfahren!
83
4.2 Fehlerfortpflanzung zufälliger Messfehler
Wie schon bei der Fortpflanzung systematischer Fehler muss auch für die zufälligen Fehler der
Einfluss auf das Messergebnis untersucht werden. Der Messung zugänglich sind die mit zufälligen
Fehlern behafteten Messgrößen x1,x2,…,xn.
y = f ( x1 , x2 ,..., xn )
(4.7)
Aufgrund der Fehler werden wiederholte Messungen der Größen x1 , x2 ,..., xn durchgeführt.
x1 sei m-mal gemessen. Dann gilt für den Fehler:
∆x1 j = x1 j − x1r
mit
x1 =
1 m
⋅ ∑ x1 j
m j =1
für k Messwerte von x2 gilt ebenso:
∆x2 v = x2 v − x2 r
mit
x2 =
1 k
⋅ ∑ x2 v
k v =1
Für ein beliebig herausgegriffenes Messwertepaar x1j und x2ν ist yjν:
y jv = f (x1 j , x2 v )
= f (x1 + ∆x1 j , x2 + ∆x2 v )
(4.8)
f(x1j,x2ν) wird durch die nach dem ersten Glied abgebrochene Taylorreihe ersetzt:
y jv = f ( x1 , x 2 ) +
∂f ( x1 , x 2 )
∂f ( x1 , x 2 )
∆x 2v
∆x1 j +
∂x 2
∂x1
(4.9)
Der Mittelwert y der yjν - Werte ergibt sich zu:
y=
1 1 m k
⋅ ∑∑ y jv
m k j =1 v =1
11 m k
∂f ( x1 , x2 )
∂f ( x1 , x2 )
∆x2v
∆x1 j +
=
⋅ ∑∑ f ( x1 , x2 ) +
∂x2
∂x1
m k j =1 v =1
84
(4.10)
= f ( x1 , x2 ) +
1 ∂f ( x1 , x2 ) m
1 ∂f ( x1 , x2 ) k
⋅ ∑ x2 v
⋅ ∑ ∆x1 j +
m ∂x1
k ∂x2
j =1
v =1
= f ( x1 , x 2 )
da gemäß der Definition des Mittelwertes die Summen der Abweichungen
∑ ∆x
1j
und ∑ ∆x2ν zu
Null werden. Der Mittelwert y der zu berechnenden Größe ergibt sich aus den Mittelwerten x der
gemessenen Größen.
y = f ( x1 , x2 ,..., x n )
(4.11)
In der Regel ist die Berechnung von y aus den Mittelwerten xi einfacher, als wenn erst alle
Einzelmessergebnisse y bestimmt werden.
4.2.1 Berechnung der Standardabweichung eines mit zufälligen Fehlern behafteten Messergebnisses
Zunächst wird angenommen, dass unendlich viele Einzelmessungen durchgeführt wurden und dass
die wahren Standardabweichungen σ1 und σ2 der beiden Messgrößen x1 und x2 bekannt sind.
Berechnet werden soll die Standardabweichung σy der y- Werte. Nach der Definition von σ aus
Kapitel 3, Gl. (3.45) folgt für σy:
2
σy =
11 m k
⋅ ∑∑ ( y jv − yr )
m k j =1 v =1
(4.12)
Das richtige Messergebnis wird durch yr symbolisiert:
y r ≈ y = f (x1 , x 2 )
(4.13)
mit Gl. (4.9) gilt für yjν - yr:
y jν − y = f ( x1 , x2 ) +
∂f ( x1 , x2 )
∂f ( x1 , x2 )
∆x1 j +
∆x2v − f ( x1 , x2 )
∂x1
∂x2
∂f ( x1 , x 2 )
∂f ( x1 , x 2 )
∆x 2 v
∆x1 j +
=
∂x 2
∂x1
85
(4.14)
Dieser Ausdruck wird quadriert:
(y
− y)
2
jν
∂f ( x1 , x2 )
∂f ( x1 , x2 )
=
∆x1 j +
∆x2v
∂x1
∂x2
2
+ 2⋅
2
∂f ( x1 , x2 )
∂f ( x1 , x2 )
∆x1 j ⋅
∆x2v
∂x1
∂x2
Nach Gl. (4.12) muss nun aufsummiert werden:
∑∑ ( y
m
2
k
j =1 v =1
jv
− y)
∂f ( x1 , x2 )
∆x1 j
= ∑∑
∂x1
j =1 v =1
m
k
2
∂f ( x1 , x2 )
+ ∑∑
∆x2v
∂x2
j =1 v =1
m
k
2
(4.15)
m k
∂f ( x1 , x2 )
∂f ( x1 , x2 )
+ 2 ⋅ ∑∑
∆x1 j ⋅
∆x2 v
∂x1
∂x2
j =1 v =1
∑∑ (∆x
m
Für unabhängige Messungen von x1 und x2 gilt
k
1j
j =1 v =1
⋅ ∆x 2v ) = 0 . Daher kann der letzte
Summenterm der obigen Gleichung zu null gesetzt werden. Es gilt dann:
∑∑ ( y
m
2
k
j =1 v =1
jv
− y)
∂f ( x1 , x2 )
= k ⋅
∂x 1
2
∑ (∆x )
j =1
∂f ( x1 , x2 )
+ m ⋅
∂x 2
2
m
2
1j
(4.16)
2
k
∑ (∆x )
v =1
2v
Mit
2
1 m
σ = ⋅ ∑ (∆x1 j )
m j =1
2
1
2
und
1 k
σ = ⋅ ∑ (∆x 2 v )
k v =1
2
2
(4.17)
ist Gl. (4.16):
∂f ( x1 , x2 )
∂f ( x1 , x2 )
σ = km ⋅
σ 1 + km ⋅
σ 2
∂x1
∂x2
2
2
2
y
Nach Division durch k⋅m und anschließende Wurzelziehung folgt für σy aus Gl. (4.12):
86
(4.18)
∂f ( x1 , x2 ) 2 ∂f ( x1 , x2 ) 2
σ 1 +
σ 2
σ y =
∂
x
∂
x
1
2
2
2
(4.19)
Diese Gleichung bezeichnet man als Gaußsches Fehlerfortpflanzungsgesetz für zufällige Fehler.
Nach Aufhebung der Beschränkung von zwei Variablen gilt:
∂y 2
σ y = ∑ σ i2
i =1 ∂xi
n
(4.20)
In der Praxis sind die Standardabweichungen σi nicht bekannt, sondern nur die Schätzwerte si, da in
der Praxis nicht unendlich viele Messwerte vorliegen. Der Schätzwert der Standardabweichung der
y-Werte lautet:
∂y 2
si2
s y = ∑
i =1 ∂xi
n
(4.21)
Beispiele:
1. y ist eine lineare Funktion
y = ax1 + bx2 + cx3
∂y
∂y
∂y
und
analog
=a;
∂x2
∂x3
∂x1
;
Standardabweichung:
s y = a 2 s12 + b 2 s22 + c 2 s32
2. y ist eine rationale Funktion
x ⋅x
y= 1 2
x3
;
∂y x2 y
=
=
∂x1 x3 x1
2
;
∂y
x2 y2
= 22 = 2
x3 x1
∂x1
;
∂y
x2 ⋅ x2 y2
= 1 4 2 = 2
x3
x3
∂x3
∂y
analog
∂x2
x ⋅x
y
∂y
=− 1 2 2 =−
x3
x3
∂x1
Schätzwert der Standardabweichung:
sy= y ⋅
s12 s 22 s32
+
+
x12 x22 x32
87
2
4.2.2 Überprüfung der Aussagefähigkeit der Schätzwerte x̂ und s
Bei der Auswertung von Messergebnissen stellt sich unweigerlich die Frage: Wie nahe liegt der
Mittelwert beim wahren bzw. richtigen Wert? Die Antwort soll in Form einer Wahrscheinlichkeit
angegeben werden. Es müssen daher die Grenzen eines Bereiches ermittelt werden, innerhalb dessen sich der richtige Wert mit einer bestimmten statistischen Sicherheit befindet. Voraussetzung
hierfür sei, dass unendlich viele Messwerte existieren und dass der Mittelwert µ sowie die
Standardabweichung σ der Verteilung bekannt sind.
Es werden von der Messgröße k Messwerte (1 << k << ∞) aus unendlich vielen Messwerten
stichprobenartig bestimmt. Die erste Stichprobe der Messgröße x ergibt einen Mittelwert x1 .
Entsprechend liefert die zweite Stichprobe den Mittelwert x2 usw. Es gilt jedoch x1 ≠ x2 ≠ K ≠ xn .
Die Mittelwerte xi weichen weniger voneinander ab als die Messwerte. Durch die Mittelwerte xi
x und die Standardabweichung
wird eine neue Verteilung gebildet, die durch den neuen Mittelwert ~
σ ~x charakterisiert wird:
1
~
x = ⋅ ( x1 + x2 + ... + xn )
n
(4.22)
1 n
= ⋅ ∑ xi
n i =1
Bei hinreichend vielen Stichproben wird sich ~
x nicht vom Mittelwert µ aller Einzelmesswerte unterscheiden. Die Einzelmesswerte stammen aus einer Verteilung mit der Standardabweichung σ.
Jeder Mittelwert xi hat bei ausreichendem Stichprobenumfang ebenfalls die Standardabweichung σ. Mit
x 1
∂~
=
∂x1 n
und insgesamt n Mittelwerten errechnet sich die Standardabweichung σ ~x aus:
2
σ ~x2 = ⋅ (σ 2 + σ 2 + ... + σ 2 ) =
1
n
1
⋅ nσ 2
2
n
zu:
σ ~x =
σ
n
⋅
(4.23)
88
Die Standardabweichung der Verteilung der Mittelwerte ist um 1
n kleiner als die der
Einzelmesswerte. Mit einer Wahrscheinlichkeit von 68,3% (c = 1; cσ ~x = σ ~x = σ
n ) liegt also ein
Mittelwert im Bereich
σ
~
x±
n
Für den Fehler gilt mit 68,3% Wahrscheinlichkeit
σ
~
x − xi ≤
n
(4.24)
In der Praxis kann nur mit dem Schätzwert s gerechnet werden. Sinngemäß gilt dann, dass der richtige Wert mit einer Wahrscheinlichkeit von
50,0% um höchstens ± 0,675 s
68,3% um höchstens ± 1 s
n
95,5% um höchstens ± 2 s
n
99,7% um höchstens ± 3 s
n
n
vom gefundenen Mittelwert xi abweicht.
Für den mittleren Fehler ∆x des Mittelwertes gilt (Wahrscheinlichkeit von 68,3%):
s
∆x = ~
x−x =
n
(4.25)
Das Messergebnis x wird in der Form des Mittelwertes mit seinen Grenzen (Vertrauensbereich) angegeben:
x = x ±c
s
cs
= x 1 ±
n
x n
wobei der Faktor c entsprechend der gewünschten Aussagewahrscheinlichkeit gewählt wird.
89
(4.26)
4.3 Messunsicherheit bei bekannten Garantiefehlergrenzen
Eine Analyse von systematischen und zufälligen Fehlern erfolgt nur in speziellen Fällen. Häufig
werden Fehlerbetrachtungen anhand der Garantiefehlergrenze oder der Klassengenauigkeit durchgeführt. Ein Messgerätehersteller garantiert beispielsweise, dass die Fehler, der mit dem Messgerät
unter festgelegten Bedingungen ermittelten Messwerte, innerhalb der angegebenen Grenzen liegen.
Diese Garantiefehlergrenze gibt somit die äußerste Abweichung vom richtigen Wert, bzw. die
maximal mögliche Unsicherheit des Messwertes an.
(± )G =
Unsicherheit ∆x
Meßbereichsendwert X
(4.27)
Daraus folgt:
∆x = X ⋅ G
∆x X
= ⋅G
x
x
;
(4.28)
Die relative Unsicherheit des Messwertes nimmt mit dem Verhältnis X/x zu. Daher resultiert auch
die Forderung, den Messbereich immer weitestgehend auszunutzen.
4.4 Fortpflanzung von Fehlergrenzen
y wird aus den gemessenen Größen x1, x2,…, xn berechnet. Die Garantiefehlergrenzen G1,G2,…,Gn
und die Messbereichsendwerte X1,X2,…,Xn seien bekannt. Damit sind auch die Unsicherheiten
∆x1=X1G1 usw. bekannt. Wie groß ist nun die mögliche Unsicherheit des Messergebnisses
y=f(x1,x2,…,xn)?
Für die maximal mögliche Unsicherheit ∆y* gilt:
n
∆y * = ∑
i =1
∂f
∆xi
∂xi
für ∆xi << xi
(4.29)
Bei zweiseitigen Fehlergrenzen wird wegen des unbekannten Vorzeichens mit den Beträgen gerechnet. Entsprechend gilt für die relative Unsicherheit (siehe Gl. (4.6)):
y = a1 x1α1 ⋅ a 2 x2α 2 ⋅ K ⋅ a n xαn n
∆xi X i
∆x
∆y n
Gi ;
=
= ∑α i i
xi
xi
y
xi
i =1
90
n
n
∆y *
∆x
X
= ∑ i α i = ∑ i Giα i
y
i =1 xi
i =1 xi
(4.30)
Das Messergebnis wird dann angegeben als:
∆y *
yr = y ± ∆y = y 1 ±
y
*
(4.31)
Die durch ±∆y* abgesteckten Grenzen werden als maximale oder „sichere“ Ergebnisfehlergrenzen
bezeichnet. Es ist aber als unrealistisch anzusehen, dass xi um die volle Garantiefehlergrenze Gi
verfälscht ist und dass alle Einzelfehler in die gleiche Richtung wirken.
Realistischer ist, die wahrscheinlichen Fehlergrenzen zu ermitteln. Hierbei ist die Verteilung der
Fehler nicht bekannt. Diese Unsicherheit wird als wahrscheinliche Unsicherheit ∆y** bezeichnet.
Sie kann nicht mathematisch begründet berechnet werden. Daher wird hier die Rechenvorschrift für
die Standardabweichung bei Messergebnissen übernommen.
∂f 2
si2
s y = ∑
i =1 ∂xi
n
Wird Gl. (4.21) auf die Fehlergrenzen bezogen, gilt:
2
∂f
∆y = ∑
∆xi =
i =1 ∂xi
n
**
∂f
X i Gi
∑
i =1 ∂xi
n
2
(4.32)
bzw.
∆y **
=
y
2
∆xi
α i =
∑
i =1 xi
n
Xi
Giα i
∑
i =1 xi
n
2
(4.33)
Das Messergebnis wird angegeben als:
∆y **
yr = y ± ∆y ** = y 1 ±
y
91
(4.34)
Es erscheint wichtig an dieser Stelle noch einmal auf den Unterschied zwischen dem Fehler bei der
Messung und der Unsicherheit eines Messergebnisses hinzuweisen! Der Messfehler beruht beispielsweise auf Störeinflüssen bei der Messung oder Ablesefehlern bei der Auswertung. Die Unsicherheit eines Messergebnisses ist der Bereich, der z. B. durch die feste Garantiefehlergrenze
eines Messgerätes oder durch die bekannte Unsicherheit bei der Übertragung einer Messgröße
zustande kommt. Die Unsicherheit des Messergebnisses lässt sich daher von vornherein
bestimmen.
92
5 Strukturen von Messeinrichtungen
Für die Messung einer Größe sind in der Regel mehrere Messgeräte erforderlich, die eine Messeinrichtung oder ein Messsystem bilden. Die Art und Weise, wie die Messgeräte verschaltet und die
Signale verknüpft sind, wird als Struktur der Messeinrichtung bezeichnet. Diese ist für das statische
und dynamische Verhalten der Messeinrichtung maßgebend und bestimmt, wieweit äußere Störgrößen und Änderungen der Messgeräteparameter das Messergebnis beeinflussen können.
5.1 Kettenstruktur
Bei der sehr häufig angewandten Kettenstruktur sind die Messgeräte hintereinander geschaltet. Sie
bilden eine Kette. Die Messeinrichtung enthalte beispielsweise drei Messgeräte mit den folgenden
statischen Übertragungsgleichungen:
y1=k1x1
y2=k2x2
y3=k3x3.
Das Ausgangssignal des vorausgehenden Geräts ist jeweils das Eingangssignal des nachfolgenden,
y1=x2;y2=x3 und der Messwert y3wird:
y3 = k1k 2 k3 x1 .
Bei der Messkette multiplizieren sich die Übertragungsfaktoren der einzelnen Messgeräte. Der
Übertragungsfaktor K der Messeinrichtung ergibt sich als das Produkt der einzelnen Faktoren ki:
K = k1k 2 K k n .
(5.1)
Die Empfindlichkeit E der Messkette lässt sich ebenso aus den Geräteempfindlichkeiten
bestimmen.
Die im vorausgegangenen Abschnitt entwickelten Rechenregeln zur Fortpflanzung von Fehlergrenzen sind sinngemäß auch auf Messeinrichtungen anzuwenden. Sind die Übertragungsfaktoren ki mit
den Unsicherheiten ∆ki behaftet, so ist nach Gl. (4.33) die wahrscheinliche, relative Unsicherheit
des Übertragungsfaktors K der gesamten Messkette
∆y **
=
y
n
∂f
∑ ∂x
i =1
i
∆xi
93
2
2
∆k
∆k ∆k
∆K **
= 1 + 2 + ... + n
K
k1 k 2
kn
2
(5.2)
.
5.2 Parallelstruktur
Differenzbildung zur Gleichtaktunterdrückung
Eine Messeinrichtung ist parallel strukturiert, wenn mindestens zwei Größen gleichzeitig oder
nacheinander mit demselben Übertragungsfaktor k gemessen und verarbeitet werden. Die
Einrichtung von Abbildung 5.1 zum Beispiel verarbeitet die beiden Eingangssignale x1und x2und
liefert die Signale
y1 = kx1
y = y1 − y 2
x1
;
y 2 = kx2
= k ( x1 − x2 ) .
k
(5.3)
y1
x2
k
y
y2
Abbildung 5.1: Messanordnung mit Differenzstruktur zur Gleichtaktunterdrückung
Durch die Differenzbildung wird im einfachsten Fall der Nullpunkt unterdrückt und der Messbereich damit besser ausgenutzt. Ist x1 z. B. eine zu messende Spannung zwischen 0 und 250V und
interessieren nur Spannungswerte größer als 200V, so kann durch Verwendung einer Referenzspannung x2= 200V der Messbereich entsprechend eingeengt werden.
Die Referenzgröße muss dabei nicht konstant bleiben. So besteht z. B. bei der Messung geringer
radioaktiver Strahlung das Problem, dass ein Detektor jeweils die Summe aus der natürlichen und
künstlichen Radioaktivität erfasst. Wird jetzt ein zweiter Detektor zur Messung allein der natürlichen Strahlung benutzt und wird dessen Signal als „Nulleffekt“ von dem des ersten Detektors
abgezogen, so ist das entstehende Differenzsignal ein Maß für die Stärke der künstlichen Quelle.
Die Differenzbildung ist des weiteren geeignet, unerwünschte Einflüsse auf die Messgeräte zu korrigieren. Ist die Messgröße x1 beispielsweise der Wert eines Widerstandes, der von R0 ausgehend
sich infolge einer Temperaturänderung um ∆RT und infolge einer Dehnung um ∆Rε ändert, und
wird als Messgröße x2 derselbe Widerstand genommen und nur der Temperaturänderung
ausgesetzt, so hängt die Differenz y der beiden Signale
y = y1 − y 2
= k (R0 + ∆RT + ∆Rε ) − k (R0 + ∆RT )
94
= k∆Rε
nur noch von der Dehnung ab. Der Grundwiderstand R0 und seine Zu- oder Abnahme mit der Temperatur gehen explizit nicht in das Messergebnis ein.
Ein Spezialfall ist die Verwendung sogenannter Differentialaufnehmer, deren Signale sich in Abhängigkeit von einer Messgröße gegensinnig ändern. So lässt sich z. B. eine Strecke smessen,
indem der Abgriff eines Potentiometers um diese Strecke verstellt und die Differenz der
abgegriffenen Widerstände gebildet wird. Von der Mittelstellung des Potentiometers ausgehend
nimmt der Widerstand der einen Potentiometerhälfte um ∆R zu, der der anderen um ∆R ab. Das
Messsignal
R
R
y = k + ∆R − k − ∆R = 2k∆R
2
2
ist also doppelt so groß wie bei Verwendung einer Potentiometerhälfte und einer Nullpunktsunterdrückung von R/2. Darüber hinaus ist die Kennlinie der Differentialaufnehmer in einem gewissen
Bereich auch dann linear, wenn die der Geberhälften gekrümmt ist.
In diesen Beispielen haben sich die jeweils gleichen Signalanteile durch Differenzbildung gegenseitig aufgehoben. Nur die unterschiedlichen Anteile lieferten einen Beitrag zum Ausgangssignal.
Die Messeinrichtungen sind unempfindlich gegen Gleichtaktstörungen. Additive Störungen fallen
heraus. Beispiele für diese Strukturen sind die Differenzverstärker und die Brückenschaltungen.
Verhältnisbildung zur Eliminierung der Messgeräteempfindlichkeit
Die Differenz der Messsignale muss nicht kontinuierlich, sondern kann auch zu diskreten Zeitpunkten gebildet werden. Diese Vorgehensweise soll anhand der Schaltung in Abbildung 5.2 erläutert
werden, bei der drei Messsignale nacheinander über einen Schalter an das Messgerät angeschlossen
werden können. Unterstellt wird, dass das Messgerät schon ohne Eingangssignal das
Ausgangssignal y0 liefert (fehlerhafter Nullpunkt) und den Übertragungsfaktor k besitzt. Werden als
Eingangssignale xi z. B. 0, die zu messende Größe x und eine bekannte Referenzgröße xR gewählt,
so werden nacheinander die folgenden Ausgangssignale yi erhalten:
1. Schritt: x1=0
2. Schritt: x2=x
3. Schritt: x3=xR
y1=y0
y1=y0+kx
y3=y0+kxR
95
y1
x1
x2
k
x3
y2
y3
Abbildung 5.2: Serielle Messstellenabfrage und -verarbeitung
Die Signale yi werden abgespeichert und weiterverarbeitet. Wird y1 von y2 subtrahiert, so fällt ein
eventueller Nullpunktsfehler heraus und die Differenz ist proportional zu x. In der gleichen Weise
kann auch y3 hinsichtlich des Nullpunkts korrigiert werden:
y 2 − y1 = y * = kx
y3 − y1 = y R* = kxR .
Wird jetzt noch das Verhältnis der korrigierten Signale gebildet, so kürzt sich der Übertragungsfaktor k heraus und die zu messende Größe x ist gleich dem Referenzsignal xR, multipliziert mit
dem Verhältnis aus den korrigierten Messwerten y* und y *R :
y*
kx
=
*
y R kx R
;
x = xR
y*
y R*
(5.4)
Durch die Verwendung einer Referenzgröße und die Bildung des Verhältnisses gehen die Messgeräteempfindlichkeit und ihre Änderung nicht mehr in das Messergebnis ein (multiplikative Störgrößen fallen heraus). Ein bekanntes Beispiel für diese Struktur ist der Zweirampen-Umsetzer.
5.3 Kreisstruktur
Prinzip
Kennzeichen der Kreisstruktur ist die Rückführung eines Signals vom Ausgang an den Eingang der
Schaltung (Abbildung 5.3). Das rückgeführte Signal
xG=kG·y
wird im Summationspunkt 1 entweder zum Eingangssignal addiert (Vorzeichen + ) oder von diesem subtrahiert (Vorzeichen -). Die Rückführung des Signals mit einem positiven Vorzeichen,
96
x
+-
k1
y
xG
kG
Abbildung 5.3: Kreisstruktur einer Messeinrichtung mit dem zurückgeführten Signal xG
die Mitkopplung, kann zu schwingungsfähigen Systemen führen. Diese Systeme oszillieren auch
dann noch, wenn das (zum Anstoßen benötigte) Eingangssignal nicht mehr vorhanden ist. Die
zweite Betriebsweise, die Gegenkopplung, in der das rückgeführte Signal abgezogen wird, liegt den
Messverstärkern und allgemein allen Kompensationsverfahren zugrunde. Ist k1 der Übertragungsfaktor der Messeinrichtung im Vorwärtszweig und kG der im Rückführungskreis, so hängen Eingangs- und Ausgangssignal wie folgt zusammen:
y = k1 ( x − xG ) = k1 ( x − kG y ),
y=
k1
x
1 + k1kG
(5.5)
und die Empfindlichkeit E der Messeinrichtung wird
E=
k1
1
1
dy
=
=
≈
dx 1 + k1 k G 1 k1 + k G k G
für k1 → ∞ .
(5.6)
Solange der Übertragungsfaktor k1 groß genug ist, um seinen Kehrwert gegenüber kG vernachlässigen zu können, beeinflusst er nicht die Empfindlichkeit der Messeinrichtung. Diese wird allein bestimmt durch den Übertragungsfaktor kG in Rückwärtsrichtung, der im allgemeinen durch stabile
passive Bauelemente realisiert werden kann. Die große Verstärkung k1 in Vorwärtsrichtung erzwingt praktisch die Gleichheit von x und xG,
x − xG ≈ 0
.
(5.7)
Kompensations- und Ausschlagverfahren
Der geschlossene Wirkungskreis einer gegengekoppelten Messeinrichtung bedeutet immer eine
Kompensationsmessung. Die Messgröße wird mit einer Referenz verglichen und die Messung ist
durchgeführt, wenn die Differenz genügend klein geworden ist. Für die Genauigkeit ist der Übertragungsfaktor kG im Rückwärtszweig maßgebend.
Von diesem Kompensationsverfahren ist das Ausschlagverfahren zu unterscheiden, das der Kettenstruktur zugrunde liegt. Dort laufen die Signale nur in Vorwärtsrichtung, ohne eine Rückführung.
97
Die Genauigkeit der Messkette wird bestimmt durch die Genauigkeit aller in der Kette liegenden
Glieder.
Messeinrichtungen mit Kreisstruktur benötigen immer eine Hilfsenergie, um das rückgeführte
Signal, die Vergleichsgröße, zu erzeugen. Dafür wird dem Messobjekt keine Energie entzogen, da
ja die Mess- und die Vergleichsgröße gleich groß sind. Bei den Kompensationsverfahren ist eine
Rückwirkung vom Messgerät auf das Messobjekt praktisch nicht vorhanden. Eine Spannung z. B.
kann gemessen werden, ohne die Quelle mit einer Stromentnahme zu belasten.
98
6 Sensoren, Aufnehmer, Fühler, Sonden, Geber
6.1 Allgemeines über Fühler
Als Fühler oder Messaufnehmer bezeichnet man das erste Glied einer Messkette, das eine
nichtelektrische Messgröße oder eine elektrische Feldgröße in ein elektrisches Signal umformt
(siehe Abbildung 6.1). Fühler sind die „Sinnesorgane“ der Messtechnik. Sie haben die Aufgabe, die
zu untersuchenden Zustände der Umwelt zu erfassen und einer elektrischen Auswertung zugänglich
zu machen.
Die vielfältigen Möglichkeiten sind für die zahlreichen Messaufgaben in der Prozess- und
Automatisierungstechnik nur dann optimal nutzbar, wenn eine möglichst breite Palette einfach
handhabbarer, zuverlässiger und preiswerter Sensoren zur Verfügung steht. Die Sensortechnik
gehört zu den Teilgebieten der Messtechnik, die zur Zeit das größte Entwicklungspotential besitzt.
Dabei zeichnet sich die Tendenz ab, Halbleitereffekte zu nutzen und die Messaufnehmer mit
anderen Funktionseinheiten der Signalverarbeitung bis hin zum Mikrocomputer („intelligente“
Sensoren) zu integrieren.
Meßgröße
Sonde
Fühler
Geber
Signal
(elektr.)
Meßobjekt
y
x
Sensor
Meßaufnehmer
Abbildung 6.1: Sensor als erstes Glied in einer Messkette
Wie im Abbildung 6.1 schematisch dargestellt ist, besteht der Sensor selbst häufig aus einer Messkette, deren einzelne Glieder die Messinformation schrittweise umformen und aufbereiten. Der die
Messgröße aufnehmende Teil des Sensors, der mit dem Messobjekt in unmittelbarem Kontakt steht,
wird als Fühler oder Sonde bezeichnet. Der das elektrische Ausgangssignal erzeugende Teil ist der
Geber. Sinngemäß bezeichnet man Sensoren zum Beispiel als „Temperaturfühler“, „Feldsonde“,
„Geschwindigkeitsaufnehmer“, „Wegsensor“, oder „Spannungsgeber“. Bezeichnungen wie „Kraftgeber“ sind widersinnig und sollten vermieden werden.
99
6.2 Anforderungen an Fühler
Die wichtigsten technischen Anforderungen, die an Sensoren gestellt werden, sind ein gutes dynamisches Verhalten, eine hohe Empfindlichkeit und eine gute Abschirmung gegen Störgrößen. Die
Forderung nach einer linearen Kennlinie tritt zunehmend in den Hintergrund, da es mit relativ einfachen Mittel der analogen Elektronik und insbesondere der Mikrocomputertechnik möglich ist,
nichtlineare Kennlinien zu linearisieren. Ein gutes dynamisches Verhalten ist Voraussetzung, um in
kürzester Zeit den stationären Endwert zu erreichen. Eine zu geringe Empfindlichkeit kann wegen
der notwendigen Nachverstärkung zusätzliche Fehler verursachen. Ein niedriger resultierender Gesamtfehler des Sensors ist von Bedeutung, wenn z. B. eine genaue Temperatur- oder Lageregelung
erforderlich ist.
Weiterhin dürfen Sensoren möglichst geringe Einfluss- und Störeffekte aufweisen. Eine
Einflussgröße kann entweder durch geeignete Maßnahmen konstant gehalten werden oder aber der
Einfluss wird in der Auswertung korrigiert. Daneben können sich mechanische Erschütterungen
und Schwingungen als Störgrößen auswirken, ebenso wie elektromagnetische Einflüsse
unterschiedlich vertragen werden (Elektromagnetische Verträglichkeit, EMV).
Neben diesen Einflusseffekten existieren gewöhnlich Grenzwerte für die Umgebungsbedingungen,
die nicht überschritten werden dürfen, wenn ein zuverlässiger Betrieb angestrebt wird. Die zulässigen mechanischen und thermischen Beanspruchungen sind gewöhnlich durch z. B. bestimmte maximale Beschleunigungswerte bzw. Temperaturbereiche begrenzt.
6.3 Einteilung der Fühler
Jeder Fühler basiert auf einem physikalischen Effekt, bei dem die Ausgangsgröße eine Funktion
der Messgröße ist. Messgrößen werden unterteilt in nichtelektrische und elektrische Messgrößen.
Elektrische Messgrößen sind im wesentlichen Strom, Spannung, Widerstand und Frequenz. Die
Strahlung (elektromagnetische Wellen) kann aber auch noch dazu gerechnet werden.
Nichtelektrische Messgrößen können unterteilt werden in:
1.
2.
3.
4.
5.
geometrische und kinematische Größen: z. B. Dehnung, Drehzahl
mechanische Größen: z. B. Kraft, Schwingung
Temperatur
Konzentrationen: z. B. Gasanalysen
strömungstechnische Größen: z. B. Geschwindigkeit, Volumenstrom
Die Einteilung der Messfühler in dieser Vorlesung wird entsprechend der Messgrößen gewählt.
Man könnte die Messfühler auch nach ihrem Ausgangssignal in Fühler mit mechanischem oder
100
elektrischem Ausgangssignal einteilen; ebenso lassen sich aktive und passive Messfühler
unterscheiden.
Ein aktiver Sensor erzeugt ohne externe Energiequelle unmittelbar ein Spannungs-, Ladungs- oder
Stromsignal und gibt Leistung an das nachfolgende Messglied ab. Durch die Leistung, welche dem
Messobjekt entzogen wurde, entsteht grundsätzlich eine Rückwirkung auf das Messobjekt, die
einen systematischen Fehler zur Folge hat. Mit aktiven Fühlern sind statische Messungen nur
möglich, wenn im stationären Zustand Leistung vom Messobjekt an den Sensor abgegeben werden
kann.
Bei passiven Sensoren beeinflusst die Messgröße zunächst eine elektrische Zustandsgröße, beispielsweise einen Widerstand oder eine Kapazität. Solche Sensoren werden entsprechend als
Widerstandsgeber und kapazitive Geber bezeichnet. Passive Geber benötigen immer eine Hilfsenergie und zeigen daher in der Regel keine energetische Rückwirkung auf das Messobjekt.
Man unterscheidet auch direkte und indirekte Messfühler. Ein direkt arbeitender Fühler liegt vor,
wenn die zu ermittelnde Größe unmittelbar in ein entsprechendes Ausgangssignal umgewandelt
wird.
Beispiel: Manometer; der Druck bewirkt die Verformung einer Feder. Diese Verformung wird
direkt als Weg- oder Winkeländerung angezeigt.
Ein indirekt arbeitender Fühler liegt vor, wenn zur Ermittlung der Messgröße technologische,
physikalische, mathematische oder mechanische Zusammenhänge herangezogen werden.
Beispiel: Drehmomentmessung mit Hilfe von Dehnungsmessstreifen. Direkt gemessen wird die
Oberflächendehnung. Aus den Gesetzmäßigkeiten zwischen Oberflächendehnung (Torsionswinkel), Schubspannung und den eingeleiteten Kräften wird das Moment bestimmt.
6.4 Fühler für geometrische Größen
6.4.1 Widerstandsgeber zur Längen- und Winkelmessung
Die in der Elektrotechnik verwendeten Werkstoffe unterscheiden sich sehr hinsichtlich ihrer elektrischen Leitfähigkeit. Ihr ohmscher Widerstand kann Werte in dem weiten Bereich von mehr als
20 Zehnerpotenzen annehmen. Sehr niedrige Widerstände sind bei Leitern, sehr hohe bei isolierenden Werkstoffen zu messen.
In der Messtechnik nutzt man die Änderung des elektrischen Widerstandes, aufgrund einer mechanischen, thermischen, magnetischen oder optischen Einwirkung. Über die Widerstandsmessung
wird die die Widerstandsänderung verursachende Größe erfasst. Die Widerstandsaufnehmer sind
passive Bauteile, da zur Messung jeweils eine Spannungs- oder Stromversorgung notwendig ist.
101
Widerstandsaufnehmer werden zur Längen- und Winkelmessung verwendet. Sie bestehen jeweils
aus einem Potentiometer, dessen Abgriff von der zu messenden Größe verstellt wird.
Abgriff
0
Rx ; x
Rg ; l
Abbildung 6.2: Potentiometer
Der Draht soll über seine Länge l einen gleichbleibenden Widerstand aufweisen. Durch den veränderlichen Abgriff um den zu messenden Weg x längs des Leiters, wird x indirekt gemessen. Der
direkt gemessene Widerstand Rx eines Drahtes ist der Länge x proportional und dem Drahtquerschnitt A umgekehrt proportional.
Rx =
ρ⋅x
A
= f (x )
(6.1)
ρ =ˆ spezifischer Widerstand
Als Schleifkontakt werden häufig Drahtbürsten aus einer Gold-Legierung benutzt. Der Übergangswiderstand zwischen Widerstandsdraht und Abgriff kann schon bei geringsten Anpresskräften niedriger als 0,5 Ω gehalten werden.
Eine lineare Kennlinie liegt vor, wenn der Drahtquerschnitt und der spezifische Widerstand über
die Länge konstant sind. Liegt eine nichtlineare Verteilung des Widerstandsdrahtes über der Länge
vor (durch Veränderung des Durchmessers des gewickelten Widerstandes oder durch Spreizung der
Windungen), so handelt es sich um ein Funktionspotentiometer mit einer nichtlinearen Kennlinie.
Statische Eigenschaften
Bei einem einfachen Draht liegt der Vorteil im Preis, und er besitzt eine große Auflösung (10-2 mm
bzw. Winkelgrad). Nachteilig ist der kleine Widerstand Rg (< 10Ω), da eine endliche Drahtdicke
notwendig ist. In einigen Anwendungsfällen bringt auch der Abgriff des Widerstandes Probleme
mit sich. Der Schleifkontakt kann den Widerstandsdraht beschädigen oder zerstören. Mechanische
Erschütterungen können den Abgriff völlig vom Draht lösen.
Bei wendelförmiger Anordnung werden Widerstandswerte von Rg = 100 Ω ÷ 100 kΩ erreicht.
102
Als Nachteil wirkt sich das kleine und endliche Auflösungsvermögen bedingt durch die Drahtbreite
aus.
Eine aufgedampfte Widerstandsschicht lässt sich heutzutage leicht und preiswert herstellen und
man kann mit dieser Bauart große Widerstandswerte realisieren.
Die allgemeinen Nachteile der Widerstandsaufnehmer sind zunächst der relativ große Kraftaufwand gegen die mechanische Reibung, so dass sie durch ihre Trägheit nicht für dynamische Vorgänge geeignet sind. Hinzu kommt der Temperatureinfluss auf den spezifischen Widerstand
(ρ=ρ(T)) und die ständige Versorgung der Fühler mit Hilfsenergie.
In Tabelle 6.1 sind verschiedene Widerstandswerkstoffe, die zur Potentiometerherstellung eingesetzt werden, aufgelistet.
Tabelle 6.1: Widerstandswerkstoffe
PotentiometerKonstantan
SilberPalladium
PotentiometerGold-Legierung
Zusammensetzung
50% Nickel,
50% Kupfer
(Mangan)
50% Palladium,
50% Silber
70% Gold, 20% Silber,
4% Unedelmetall
Temperaturbeiwert αT in 1/K
1,7⋅10-5
23⋅10-5
11,4⋅10-5
0,5
0,3
0,31
Spezifischer
Widerstand
in Ω mm /m
2
Sonstige
Eigenschaften
Drähte bis zu 10 µm
Drähte bis 17 µm
Durchmesser, gute
Durchmesser,
Korrosionsbeständigkeit korrosionsbeständig wie
Platin
Drähte bis zu 10 µm
Durchmesser, sehr
korrosionsbeständig
Der Temperaturbeiwert αT des Werkstoffes geht wie folgt in die Widerstandsberechnung ein (erste
Näherung):
R = R0 (1 + α T ⋅ ∆T )
(6.2)
Ausführungsformen
Der am meisten verbreitete Widerstands-Längenfühler ist der Schleifdrahtfühler (siehe Abbildung
6.3). Auf einen mit Lack isolierten Trägerdraht wird ein Widerstandsdraht gewickelt. Ein Schleifer,
103
dessen Position durch die zu messende Länge festgelegt ist, greift einen der gemessenen Länge
proportionalen Widerstandswert ab. Als Stromabnehmer dienen Drahtbürsten aus Platin-Iridium
oder besondere Gold-Legierungen.
S
ca. 2 mm
Trägerdraht
Isolation
Wicklung
Abbildung 6.3: Aufbau eines Schleifdraht-Längenfühlers
6.4.2 Induktive Geber
In derselben Weise, wie verschiedene nichtelektrische Größen den ohmschen Widerstand von
Messaufnehmern beeinflussen und dadurch messbar werden, können auch Induktivitäten durch
nichtelektrische Größen gesteuert werden. Bei diesen induktiven Fühlern wird die Änderung der
Induktivität L als Ausgangssignal betrachtet. Die Induktivität einer Spule wird in „Henry“ [H]
angegeben.
i
U
L
Sie hängt von dem Quadrat der Windungszahl w und dem magnetischen Widerstand Rm einer Spule
ab.
L=
w2
Rm
(6.3)
In den magnetischen Widerstand einer Spule mit geschlossenem Eisenkern gehen die Weglänge l
der Feldlinien, die von diesen durchsetzte Fläche A, die magnetische Feldkonstante µ0 und die
Permeabilitätszahl µr ein:
Rm =
L=
l
(6.4)
µ0µr A
w2 µ 0 µ r A
l
µ0 =ˆ magnetische Feldkonstante, µ0 = 1,256⋅10-6 Vs/Am
104
µr =ˆ relative Permeabilitätszahl (Materialkonstante ohne Einheit)
Die Größen, die bei den induktiven Gebern beeinflusst werden, sind die Weglänge l der Feldlinien
oder die relative Permeabilitätszahl µr.
L = f (magn. Flüsse)
Die magnetische Feldstärke H eines stromdurchflossenen Leiters wird mit Hilfe des Durchflutungsgesetzes bestimmt.
r r
∫ H ds = i
(6.5)
Am Beispiel der Zylinderspule mit w Windungen folgt somit für die magnetische Feldstärke im
Innern der Spule:
H=
w⋅i
l
(6.6)
Entsprechend diesen Überlegungen gilt für die magnetische Flussdichte B, welche die magnetische
Wirkung beschreibt:
B = µ0 ⋅ µr ⋅ H
(6.7)
Für den magnetischen Fluss φ durch die Fläche A ergibt sich dann:
φ = B⋅ A
(6.8)
Mit den Gl. (6.3) bis (6.8) kann man für die Induktivität einer Zylinderspule auch schreiben:
L=
w2 µ0 µ r A w ⋅φ
=
l
i
(6.9)
Tauchanker-Geber
In der einfachsten Form besteht ein induktiver Längenaufnehmer aus einer Spule, in die ein verschiebbarer Eisenkern eintaucht (Abbildung 6.4).
105
Eisenspule
Luftspule
Eisenkern
lFe
lLu
Abbildung 6.4: Spule mit verschiebbarem Eisenkern
Die magnetischen Feldlinien verlaufen in drei unterschiedlichen Bereichen, nämlich in Eisen
(lFe;AFe), in Luft innerhalb der Spule (lLu;ALu) und schließlich auf ihrem Rückweg in Luft außerhalb
der Spule (la;Aa). Für die magnetische Feldstärke in diesem Kreis gilt dann nach Gl. (6.5):
r r
H
∫ ds = H Fe ⋅ lFe + H Lu ⋅ lLu + H a ⋅ la = w ⋅ i
(6.10)
Der magnetische Widerstand dieser Tauchkernspule ist:
Rm =
l Fe
µ 0 ⋅ µ r ⋅ AFe
+
l Lu
la
+
µ 0 ⋅ ALu µ 0 ⋅ Aa
.
(6.11)
Der erste Term auf der rechten Seite kann wegen µr = 103 ÷ 104 von Eisen vernachlässigt werden.
Auch der dritte Term spielt kaum eine Rolle, da die Querschnittsfläche Aa sehr viel größer ist als
die Fläche im Innern der Spule. Damit ist für den magnetischen Widerstand nur die eisenfreie
Strecke lLu im Innern der Spule bestimmend
Rm ≈
l Lu
µ 0 ⋅ ALu
,
und die Induktivität
L=
w 2 w 2 ⋅ µ 0 ⋅ ALu
k
≈
=
Rm
l Lu
l Lu
(6.12)
mit k=w2µ0ALu wird um so größer, je weiter der Eisenkern in die Spule eintaucht. Diese Formel
lässt auf eine hyperbelförmige Kennlinie schließen. Die Empfindlichkeit:
E=
w 2 ⋅ µ 0 ⋅ ALu
dL
L
=−
=−
2
dl Lu
l Lu
l Lu
106
(6.13)
nimmt ebenfalls zu mit abnehmendem lLu.
Die relative Induktivitätsänderung und die relative Wegänderung stehen im gleichen Verhältnis
zueinander, jedoch mit unterschiedlichem Vorzeichen:
dl
dL
= − Lu
L
l Lu
(6.14)
In Abbildung 6.5 ist eine Füllhöhenmessung mit Schwimmer und induktiver Übertragung dargestellt.
1 Hauptbehälter
2 Niveaugefäß
3 Schwimmer
mit Eisenkern
4 Spule
5 Absperrventil
6 Verstärker
7 Anzeige
6
4
7
5
1
11
5
2
Abbildung 6.5: Füllhöhenmessung mit Schwimmer und induktiver Übertragung
Differential-Tauchankergeber
Zwei getrennte Spulen mit einem gemeinsamen beweglichen Eisenkern stellen einen DifferentialTauchankergeber dar. Der Eisenkern taucht in seiner Mittelstellung gleich tief in beide Spulen ein.
Wird er verschoben, so wird die Induktivität der einen Spule erhöht und die der anderen vermindert.
107
L1
L2
∆l
Eisenkern
Abbildung 6.6: Differential-Tauchankergeber
Um die Wegänderung des Tauchankers zu messen, werden die beiden Spulen L1 und L2 zu einer
Halbbrücke verschaltet. Diese liefert eine Diagonalspannung, die proportional zur Verschiebung ∆l
ist. Die Kennlinie dieser Messeinrichtung ist eine Gerade. Die Differenzbildung in der Halbbrücke
hat weiterhin den Vorteil, dass von außen auf beide Spulen gleich einwirkende Störungen weitgehend eliminiert werden.
Querankergeber
Für die Messung kleiner Wegstrecken um 0,1 mm werden vorwiegend Querankergeber benutzt.
Spule
lFe
Queranker
x
Abbildung 6.7: Querankergeber
Die Spule ist auf dem Schenkel eines U-förmigen Eisenkerns montiert. Der magnetische Kreis wird
durch einen Queranker geschlossen, der sich im Abstand x vom Kern befindet.
Annahme: Es treten keine Streuungen auf, d.h. der ganze magnetische Fluss φ fließt weitestgehend
nur im Eisen und zweimal durch den Luftspalt x. Der Querschnitt im Eisen und im Luftspalt sei
gleich groß.
Wenn φ konstant ist, folgt mit φ=B⋅A bei konstanten Querschnitt A, dass auch B konstant ist. Also
gilt am Übergang Eisen-Luft:
108
B = µ0 ⋅ µ r ⋅ H Fe = µ0 ⋅ H Lu
(6.15)
φ = B ⋅ A = µ0 ⋅ H Lu ⋅ A
(6.16)
Damit ist der Fluss φ:
Die magnetische Feldstärke im Luftspalt HLu wird mit Hilfe des Durchflutungsgesetzes bestimmt.
r r
l
iw = ∫ H ds = H Fe l Fe + H Lu ⋅ 2 x = H Lu Fe + 2 x
µr
⇒ H Lu
i⋅w
=
l Fe
+ 2x
µr
(6.17)
Für den magnetischen Fluss φ folgt somit
φ=
µ0 ⋅ i ⋅ w
l Fe
+ 2 x
µr
⋅A ,
und die Induktivität L der Spule ist
w ⋅ φ w 2 ⋅ µ0 ⋅ A
=
L=
= f (x )
i
lFe
+ 2 x
µr
(6.18)
2x
l Fe
+
µ0 ⋅ A µ0 ⋅ µr ⋅ A
(6.19)
bzw.
Rm =
Der letzte Term darf wieder wegen der großen Permeabilitätszahl µr vernachlässigt werden, so dass
folgende Näherung gilt
L≅
w2 ⋅ µ0 ⋅ A
2x
(6.20)
109
Die Induktivität dieser Spule mit Queranker ist umgekehrt proportional zur Breite des Luftspaltes x.
Differential-Querankergeber
Auch in der Queranker-Bauform sind Differentialgeber verfügbar. Hier haben zwei sich gegenüberliegende Spulen mit U-förmigen Kernen ein gemeinsames Joch, dass bei seiner Bewegung den
einen Luftspalt vergrößert und den anderen entsprechend verringert. Die bei dem DifferentialTauchanker diskutierten Ergebnisse sind voll auf den Differential-Querankergeber zu übertragen.
x0
Abbildung 6.8: Differential-Querankergeber
Induktiver Winkelfühler
Die Wirkung der induktiven Winkelfühler beruht auf dem Induktionsgesetz. Über eine Erregerspule, die mit einer konstanten Wechselspannung versorgt wird, kann in einem magnetischen Kreis
ein Wechselfluss erzeugt werden. In einer beweglichen Aufnehmerspule wird aufgrund des Wechselflusses eine Spannung induziert, deren Größe vom Betrag des die Spule senkrecht durchsetzenden Flusses und damit vom Stellungswinkel der Aufnehmerspule abhängig ist.
In Abbildung 6.9 sind zwei verschiedene induktive Winkelfühler dargestellt.
a) Schwenkspulsystem; Winkelbereich: nur 6°
b) Drehspulsystem; Winkelbereich: ± 45°
110
Drehspule
Schwenkspule
a)
b)
Abbildung 6.9: Induktive Winkelfühler: a) Schwenkspulsystem; b) Drehspulsystem
Die in den vorausgegangenen Abschnitten besprochenen induktiven Geber werden zur berührungslosen Messung von Wegen und Winkeln und indirekt auch zur Messung all der Größen benutzt, die sich als Wege oder Winkel darstellen lassen. Der Messbereich kann vielen Erfordernissen
angepasst werden und geht von etwa 1 µm (Auflösung 0,01 µm) bis zu ungefähr 1 m. Anwendungen finden induktive Längen- und Winkelfühler bei der Messung der Relativdehnung zwischen
Turbinenwelle und Gehäuse, bei der Dickenmessung von Folien und bei der Überwachung der
Ventilstellung in Hochdruck-Dampfleitungen.
Nachteile eines induktiven Gebers sind:
•
die nichtlineare Kennlinie,
•
die Hilfswechselspannung, die zum Messen der Induktivität benötigt wird,
•
der ohmsche Widerstand neben der Induktivität,
•
macht,
•
eine zusätzliche Kapazität, die sich aber nur bei sehr hohen Frequenzen bemerkbar
die Kraftwirkung auf den Anker.
6.4.3 Kapazitive Geber
Die Kapazität C eines Plattenkondensators hängt von der elektrischen Feldkonstanten ε0, der
Dielektrizitätszahl εr, der Plattenfläche A und dem Plattenabstand a ab. Mit der Kapazität C wird
das Speichervermögen für elektrische Ladungen Q in Abhängigkeit von der angelegten Spannung
U angegeben.
111
Q = C ⋅U
(6.21)
εr
a
Abbildung 6.10: Plattenkondensator
C=
ε 0ε r A
(6.22)
a
Eine Veränderung des Plattenabstands, der Plattenfläche oder der Dielektrizitätszahl führt zu einer
Änderung der Kapazität. Damit lassen sich über eine Kapazitätsmessung alle die Effekte überwachen, die eine oder mehrere der drei genannten Größen beeinflussen. Kapazitive Geber dienen in
erster Linie zur Weg-, Füllstands- und Schichtdickenmessung.
Änderung des Plattenabstandes
Die Kapazität eines Kondensators ist umgekehrt proportional zum Plattenabstand. Wird er verkleinert, so wird die Kapazität vergrößert und umgekehrt. Die entsprechende Empfindlichkeit E eines
Kondensators ist
E=
ε ε A
C
dC
= − 0 2r = −
a
da
a
(6.23)
Sie ist also besonders groß bei kleinen Plattenabständen. Aus einer Umstellung der letzten Gleichung folgt:
dC
da
=−
C
a
(6.24)
Ähnlich wie in Gl. (6.14) ist die relative Kapazitätsänderung proportional der relativen Plattenabstandsänderung. Die Messgröße x ist hier die Längenänderung des Plattenabstands.
112
a+x
a
0
Abbildung 6.11: Längenänderung des Plattenabstands um x
Ca + x
a
1
=
=
Ca
a + x 1+ x
a
(6.25)
Man sieht keinen linearen Zusammenhang zwischen Änderung des Abstandes und Kapazitätsänderung.
Der Blindwiderstand XC (Reaktanz) des Kondensators
Xc =
1
jωC
(6.26)
zeigt einen linearen Zusammenhang zwischen der Plattenabstandsänderung x und Reaktanzänderung.
X c (a + x ) =
1 a+x
⋅
jω ε 0ε r A
(6.27)
Beim Differential-Kondensator, der aus zwei Kondensatoren mit einer gemeinsamen, beweglichen
Mittelplatte besteht, wird diese Mittelplatte von a0 ausgehend um x verschoben. Dabei vergrößert
sich der Abstand des einen Plattenpaares und der des anderen nimmt entsprechend ab.
U
εr
εr
x
a0
a0
Abbildung 6.12: Differential-Kondensator
Da es sich hier um eine elektrische Parallelschaltung zweier Kondensatoren handelt, ist die Gesamtkapazität die Summe der Einzelkapazitäten.
113
C = C1 + C2
(6.28)
Wird nun die mittlere Platte um x verschoben, so vergrößert sich die Kapazität C1 und die Kapazität
C2 wird verkleinert.
C1 =
C2 =
ε 0ε r A
(6.29)
a0 − x
ε 0ε r A
(6.30)
a0 + x
Damit folgt für die Gesamtkapazität:
C = ε 0ε r A ⋅
(a0 + x ) + (a0 − x ) = ε ε
a −x
2
0
0 r
2
A⋅
2 a0
a − x2
2
0
(6.31)
Werden die beiden Hälften des Differential-Kondensators in die diagonalen Zweige einer Messbrücke gelegt, so ist die Diagonalspannung der Brücke streng proportional zur Änderung des Plattenabstands x. Im Kapitel „Messumformer“ werden diese Zusammenhänge noch im einzelnen vorgestellt.
Kondensatoren mit verschiebbaren Elektroden werden ähnlich wie induktive Geber zu Weg- und
Winkelmessungen benutzt. Nach dem gleichen Prinzip arbeiten die Kondensatormikrophone, die
Schallschwingungen in elektrische Signale umformen.
Änderung der Plattenfläche
Neben dem Plattenabstand lässt sich besonders einfach die Überdeckung, d.h. die wirksame Fläche
der Kondensatorplatten ändern. Befinden sich Platten mit der Breite b0 und der Länge l0 im Abstand a0 einander gegenüber, so hat dieser Kondensator eine maximale Kapazität C0 von
C0 =
ε 0ε r b0l0
(6.32)
a0
Wird nun die eine Kondensatorplatte so an der anderen vorbeigeschoben, dass beide sich nur noch
teilweise mit der Länge l überdecken, so nimmt die Kapazität von C0 auf C ab.
114
l0
b0
a0
l
Abbildung 6.13: Parallelverschiebung der Kondensatorplatten
C=
ε 0ε r b0
a0
⋅l =
C0
⋅l
l0
(6.33)
Die Kapazität ist der Länge l proportional. Damit eignet sich auch diese Kondensatoranordnung für
Wegmessungen. Die Kondensatorplatten müssen bei ihrer Bewegung exakt geführt werden, um
ihren Abstand genau einzuhalten. Anderenfalls würden Kapazitätsänderungen aufgrund von Abstandsänderungen das Messergebnis verfälschen.
Weniger empfindlich gegen diesen störenden Einfluss sind die Bauformen, die eine verschiebbare
Mittelelektrode enthalten. Die Abhängigkeit der Kapazität von der Plattenoberfläche wird z. B. bei
den bekannten Drehkondensatoren ausgenutzt.
In der Verfahrenstechnik wird aufgrund dieses Effekts der Füllstand von elektrisch leitenden Flüssigkeiten gemessen. In die Flüssigkeit wird eine zylindrische Elektrode mit einem isolierenden
Überzug eingetaucht (siehe Abbildung 6.14). Die Elektrode und die umgebende elektrisch leitende
Flüssigkeit stellen einen Zylinderkondensator mit der Isolationsschicht als Dielektrikum dar. Die
Kapazität eines Zylinderkondensators ist
C=
2πε 0ε r l
r
ln a
ri
mit l der Elektrodenlänge, ri dem Radius der Innenelektrode und ra dem Radius der Außenelektrode. Die Kondensatorfläche und damit die Kapazität der Anordnung ist um so größer, je höher der
Behälterfüllstand ist.
115
Abbildung 6.14: Höhenstandsmessung bei Leitenden Flüssigkeiten
Geometrische Änderung des Dielektrikums eines Kondensators
Das folgende Bild stellt einen Kondensator mit geschichtetem Dielektrikum dar.
α0
εr1
a1
εr2
a2
Abbildung 6.15: Kondensator mit geschichtetem Dielektrikum
a0 = a1 + a2
Die Anordnung kann als Reihenschaltung von zwei Kapazitäten C1 und C2 aufgefasst werden,
deren Gesamtkapazität zu bestimmen ist.
1
1
1
1 a1 a2
=
+
=
+
C C1 C2 ε 0 A ε r1 ε r 2
C=
a1
ε0 A
ε r1
+
a2
εr2
Mit εr1 = 1 (Luft) ist
116
(6.34)
C=
ε0 A
a1 +
a2
εr2
=
ε0A
a0 − a 2 +
a2
(6.35)
εr2
C ist abhängig von der Dielektrizitätszahl εr2 und der Dicke a2 des zweiten Dielektrikums. Ist eine
dieser Größen bekannt, so kann die andere aus einer Messung der Kapazität ermittelt werden.
Diese Methode wird zur berührungslosen Schichtdickenmessung angewendet. Papier- und Kunststofffolien, synthetische Fasern und Fäden, deren Dicke zu bestimmen ist, werden zwischen zwei
Kondensatorplatten hindurchgezogen. Die Dielektrizitätszahl der zu untersuchenden Stoffe ist bekannt, so dass aus der gemessenen Kapazität die Dicke des Materials berechnet werden kann.
Das nächste Bild zeigt einen Kondensator mit einem in der Eintauchtiefe variablen Dielektrikum.
l
a0
εr2
εr1
l0
Abbildung 6.16: Kondensator mit variablem Dielektrikum
Diese Anordnung kann als eine Parallelschaltung von zwei Kondensatoren mit der Plattenbreite b0
angesehen werden.
C = C1 + C2
=
=
ε 0ε r1b0 (l0 − l ) ε 0ε r 2b0l
a0
ε 0b0
a0
+
a0
(ε r1 (l0 − l ) + ε r 2l )
(6.36)
Mit dem Dielektrikum Luft (εr1 = 1) folgt für die Kapazität C0 des leeren, luftgefüllten
Kondensators:
C0 =
ε 0b0 l0
a0
so dass gilt:
117
ε −1
∆C C − C 0 l 0 − l ε r 2 l
=
=
+
−1 = r2
⋅l
C0
C0
l0
l0
l0
(6.37)
Dieses Prinzip wird zur Füllstandsmessung bei elektrisch nichtleitenden Flüssigkeiten und Schüttgütern angewendet. In das zu kontrollierende Medium werden zwei Kondensatorplatten eingeführt,
die mit zunehmender Füllung mehr und mehr überdeckt werden. Siehe hierzu Abbildung 6.17.
εr
Abbildung 6.17: Höhenstandsmessung bei isolierenden Flüssigkeiten
6.4.4 Hall-Sonde
Eine Hall-Sonde besteht aus einem Plättchen, dessen Dicke d klein ist gegenüber seiner Länge l
und seiner Breite b. Dieses Plättchen wird so in ein Magnetfeld B gebracht, dass es von den
Feldlinien senkrecht durchsetzt wird. Bei einem Steuerstrom I in Längsrichtung des Festkörpers
kann an seinen Seiten eine Spannung, die sogenannte Hall-Spannung UH, abgegriffen werden.
b
I
B
l
Abbildung 6.18: Hall-Sonde
118
UH
Die Ladungsträger, die sich aufgrund des elektrischen Stroms I durch den Festkörper bewegen,
werden senkrecht zur Magnetfeldrichtung abgelenkt (Lorentz-Kraft Fm). Für ein mit der Geschwindigkeit v bewegtes Elektron mit der Elementarladung e0 beträgt die Lorentz-Kraft
Fm = e0 ⋅ v ⋅ B .
(6.38)
In dem Festkörper findet eine Ladungstrennung statt, und es bildet sich zwischen den Seitenflächen
ein elektrisches Feld E aus, das eine Gegenkraft Fe auf die Elektronen zur Folge hat:
Fe = e0 ⋅ E
(6.39)
Stehen die beiden Kräfte im Gleichgewicht gilt E = v⋅B und die Hall-Spannung an dem Plättchen
der Breite b ergibt sich zu
UH = E ⋅ b = b ⋅ v ⋅ B
(6.40)
Die Geschwindigkeit v der Elektronen ist über ihre Konzentration n mit der Stromdichte S verknüpft. Bei einem Steuerstrom I durch die Querschnittsfläche des Plättchens folgt für die Stromdichte:
S=
I
= n ⋅ v ⋅ e0
b⋅d
(6.41)
Wird die letzte Gleichung nach v aufgelöst und in Gl. (40) eingesetzt, erhält man für die Hall-Spannung den Ausdruck
UH =
I ⋅B
I ⋅B
= RH ⋅
n ⋅ e0 ⋅ d
d
(6.42)
RH ist die sogenannte Hall-Konstante der Sonde. Die Hall-Konstante ist eine materialabhängige
Größe.
RH =
1
n ⋅ e0
Bei einem konstanten Steuerstrom durch den Festkörper folgt also ein linearer Zusammenhang zwischen magnetischer Flussdichte B und Hall-Spannung UH.
119
I=konst
UH
B
Abbildung 6.19: Kennlinie einer Hall-Sonde
Die Hall-Spannung nimmt mit der Elektronenkonzentration ab und mit der Elektronengeschwindigkeit zu. Aus diesen Gründen werden für Hall-Sonden hauptsächlich Halbleitermaterialien verwendet.
Konzentration der Ladungsträger
Material
n/[cm-3]
Cu
8,7⋅1022 Metall
InSb
1,1⋅1016 Halbleiter
GaAs
9⋅106
Halbleiter
Ändert man den Winkel zwischen der Richtung des Steuerstroms I und den magnetischen Feldlinien, die den Festkörper durchsetzen, wirkt sich das auf die Hall-Spannung aus. Daher kann die
Hall-Sonde auch zur Winkelmessung eingesetzt werden.
In der potentialfreien Strommessung findet die Hall-Sonde weitere Anwendung. Der Messstrom
wird durch einen Elektromagneten geschickt, dessen magnetische Flussdichte B vom Messstrom
abhängig ist. Diese magnetische Induktion wird mit der Hall-Sonde bestimmt. Bei einem konstanten Steuerstrom ist UH ein Maß für den Messstrom.
Abbildung 6.20 zeigt eine Kompensationsanordnung zur Eliminierung des Einflusses des Eisenkreises auf die Messgenauigkeit.
120
+
-
I1
N1
I2
N2
Abbildung 6.20: Kompensationsmessung mit einer Hall-Sonde
Auf dem Eisenkern befinden sich zwei Spulen, die erste mit der Windungszahl N1 und dem zu messenden Strom I1, die zweite mit der Windungszahl N2 und dem Kompensationsstrom I2. Die zweite
Spule ist so angeschlossen, dass ihr Magnetfeld dem der ersten Spule entgegenwirkt. Die resultierende magnetische Induktion wird mit einem Hall-Sensor erfasst. Durch einen u / i Verstärker wird
der Strom I2 so lange nachgeregelt, bis es zur Kompensation kommt N1I1 = N2I2. Der Strom I2 ist
dann ein Maß für den gesuchten Strom I1.
Wird die Leistung eines Verbrauchers mit Hilfe einer Hall-Sonde gemessen, erzeugt der vom Verbraucherstrom IV durchflossene Leiter in einem Eisenkern die magnetische Induktion B. Der
Steuerstrom I sei proportional der am Verbraucher anliegenden Spannung UV.
IV
I
UH
Abbildung 6.21: Leistungsmessung mit einer Hall-Sonde
Die entstehende Hall-Spannung UH ist proportional der im Verbraucher umgesetzten Leistung PV.
U H = k ⋅ U V ⋅ I v = K ⋅ Pv
(6.43)
121
6.5 Fühler für mechanische Größen
6.5.1 Dehnungsmessstreifen (DMS)
Allgemeine Funktion:
Der elektrische Widerstand eines Drahtes ändert sich reversibel unter dem Einfluss einer Dehnung
(kleine relative Längenänderung ε = ∆l / l). Der elektrische Widerstand eines Drahtes ist:
R=
ρ ⋅l
(6.44)
A
ρ =
ˆ spezifischer Widerstand [Ω mm2/m]
Widerstand eines Stoffes von 1 mm2 Querschnitt und 1 m Länge
=ˆ Länge des Drahtes [m]
A =
ˆ Querschnittsfläche des Drahtes [mm2]
l
Bei Zugbeanspruchung verformt sich der Draht. Er wird um ∆l länger und ∆d dünner.
l
d
∆l
∆d
Abbildung 6.22: Formänderung eines gestreckten Drahtes der Länge l
Auch der spezifische Widerstand kann sich um ∆ρ durch reversible Änderung des Drahtaufbaus
ändern. Die relative Widerstandsänderung dR/R ergibt sich aus Gl. (6.44) durch logarithmieren:
ln R = ln ρ + ln l − ln A
(6.45)
und anschließender Differentiation
1
1
1
1
dR = dρ + dl − dA
R
ρ
l
A
(Beweis für Gl. (6.46): Integration ergibt Gl. (6.45)
Für kleine, endliche Änderungen kann man mit Gl. (6.46) auch schreiben:
122
(6.46)
∆R ∆ρ ∆l ∆A
=
+
−
R
ρ
l
A
d.h.
∆R
∆l
= f( )
R
l
(6.47)
Die Querschnittsflächenänderung ∆Α ist hierbei negativ einzusetzen, da sich der Querschnitt A verkleinert. Die geometrische Änderung des Drahtes ist eine stoffspezifische Eigenschaft, die mit der
Poissonschen Zahl µ (Stoffkonstante) angegeben wird.
∆d
∆l
= −µ
d
l
(6.48)
Sie liegt zwischen 0,2 und 0,5. Bleibt das Volumen des Drahtes erhalten, so ist µ = 0,5.
Berechnung von ∆Α/Α:
Der Drahtquerschnitt vor der Belastung ist
A=
π ⋅d2
(6.49)
4
Durch Differentiation erhält man die Änderung der Querschnittsfläche mit dem Durchmesser
dA π
= d
dd 2
(6.50)
Für endliche Änderungen ist damit
∆A π
4
2 ∆d
= d ⋅ ∆d ⋅
=
2
A 2
π ⋅d
d
(6.51)
Mit der Poissonschen Zahl µ ist
∆A
∆l
= −2 µ
A
l
(6.52)
Man klammere auf der rechten Seite von Gl.(6.47)
∆l
aus:
l
∆R ∆ρ l
∆A l ∆l
=
+1−
⋅
R ρ ∆l
A ∆l l
123
(6.53)
In Gl. (6.53) wird Gl (6.52) eingesetzt und umgestellt:
∆R
∆ρ l ∆l
∆ρ
⋅ = 1 + 2 µ +
⋅ε
= 1 + 2µ +
R
ρ ∆l l
ρ ⋅ ε
(6.54)
Die relative Widerstandsänderung hängt außer von der zu messenden Dehnung ε, von der Poissonschen Zahl µ und dem Verhältnis der relativen Änderung des spezifischen Widerstandes zu ε ab.
Wenn ρ konstant und damit ∆ρ = 0 ist, gilt:
∆R
= (1 + 2 µ ) ⋅ ε
R
(6.55)
Beim Dehnungsmessstreifen ist die Messgröße x die Dehnung ε = ∆l / l und das Ausgangssignal y
ist R +∆R. Mit Gl. (6.54) folgt somit für die Kennlinie des Dehnungsmessstreifens:
∆ρ
R + ∆R = R + R1 + 2 µ +
⋅ε
ρ ⋅ ε
(6.56)
Im allgemeinen Fall ist der Dehnungsmessstreifen ein nichtlinearer Fühler.
Es handelt sich um einen linearen Fühler, wenn entweder ∆ρ = 0 oder ∆ρ / (ρε) konstant ist. Dann
ist das Anstiegsmaß der Kennlinie (Empfindlichkeit) für ∆ρ = 0:
y − y0
= 1 + 2µ
x
(6.57)
∆ρ
m = 1 + 2 µ +
ρ ⋅ε
(6.58)
m=
für ∆ρ / (ρε) = konstant gilt:
Das Anstiegsmaß wird bei Dehnungsmessstreifen auch mit k - Faktor bezeichnet.
Ausführungsformen von Dehnungsmessstreifen
Es gibt Draht- und Foliendehnungsmessstreifen. Der Draht wird mäanderförmig auf einen Träger
gebracht (siehe Abbildung 6.23: Ausführungsformen von Foliendehnungsmessstreifen). Er wird
mit Nitrozellulose-Klebstoff oder Kitt auf Phenolharzbasis befestigt. Als Trägerwerkstoffe dienen
Papier bei T < 70°C und Asbest bei T <400°C. Foliendehnungsmessstreifen werden aus dünn
gewalzten Metallfolien mit einem photochemischen Ätzverfahren hergestellt und auf
124
Kunstharzträgern aufgebracht. Mit dieser Technologie können auch komplexere Messgitterformen
rationell hergestellt werden (siehe Abbildung 6.23: Ausführungsformen von ).
Die Auswahl der Form des Foliendehnungsmessstreifen erfolgt in Abhängigkeit vom zu untersuchenden Belastungsfall (z. B. Zug oder Torsion).
Bei den Foliendehnungsmessstreifen können die Wendeschleifen dicker ausgeführt werden. Im
Falle einer Verformung in Querrichtung ergibt sich dann eine vernachlässigbar kleine Querempfindlichkeit.
Abbildung 6.23: Ausführungsformen von Foliendehnungsmessstreifen
5
3
1
4
2
2
5
1
1 Meßgitter
2 Abdeckung
3 Anschlußdrähte
4 Klebstoff
5 Meßobjekt
3
4
Abbildung 6.24: Aufbau eines aufgeklebten Dehnungsmessstreifens
125
Hysterese und Linearität von DMS
Wird ein aufgeklebter Dehnungsmessstreifen nach Aushärtung der Klebung erstmalig belastet, d.h.
gedehnt oder gestaucht, so steigt die relative Widerstandsänderung ∆R/R linear zu ε bis zu einem
Wert a linear an. Darüber hinaus ist der Anstieg nicht linear. Bei nachfolgender Entlastung verläuft
die Kurve nahezu parallel zum Anstieg, es bleibt jedoch nach völliger Entlastung eine scheinbare
Dehnung, die sogenannte Hysterese- Dehnung εH zurück. Bereits beim zweiten Lastwechsel findet
eine weitestgehende Annäherung des An- und Abstieges statt. Die dann noch verbleibende
Abweichung von der Geraden wird als Linearitätsabweichung bezeichnet.
∆R
a
R
εH
Abbildung 6.25: Hysterese- Dehnung
Kriechen von DMS
Die Dehnung des Prüfkörpers wird über die Klebeschicht und das Trägermaterial auf das
Messgitter übertragen, welches dann im gleichen Sinne gedehnt wird. Ausschlaggebend für die
Genauigkeit der Messung ist die Verbindung zwischen Prüfkörper und DMS. Fehler entstehen,
wenn der gedehnte Widerstandsdraht unter Belastung langsam wieder in seine Ursprungslage
zurückkriecht, weil die Klebeschicht und das Trägermaterial nachgeben oder ermüden (kein ideal
elastischer Klebstoff). Es wird eine zeitabhängige Prüfkörperdehnung vorgetäuscht, die zudem
auch noch temperatur- und dehnungsabhängig ist.
Statische und dynamische Eigenschaften
DMS werden sinnvollerweise nur in elastischen Bereichen eingesetzt. Bei den gebräuchlichsten
Materialien ist damit die Dehnung auf ε < 10-3 festgelegt. Bei dynamischer Beanspruchung wird
der Bruch durch Ermüdung des Trägermaterials ( 104 - 107 Lastwechsel) verursacht. Drähte und
Folien werden durch Schubspannungen, die an der Oberfläche der DMS angreifen, gedehnt. Das
Verhältnis Oberfläche O zu Querschnitt A ist bei einem Draht:
O
4
l
= dπ l ⋅ 2
=4
A
d ⋅π
d
(6.59)
126
Beispiel: Für einen Draht mit der Länge l = 50 mm und dem Durchmesser d = 0,02 mm gilt
O / A = 104. Das Verhältnis O/A ist sehr groß, d.h., dass relativ kleine Schubspannungen an der
Oberfläche große Normalspannungen im Querschnitt hervorrufen. Der eingebettete Draht wird da-
mit zwangsläufig verformt.
Einflussgrößen
Die Temperatur bewirkt eine Temperaturdehnung und eine Änderung des spezifischen elektrischen
Widerstandes. Der Temperatureinfluss kann minimiert werden durch die Wahl eines Werkstoffes
(Konstantan) mit geringem Temperatureinfluss, durch temperaturkompensierte DMS (Mischung
verschiedener Stoffe mit positiven und negativen Temperaturkoeffizienten) und durch geeignete
Kompensationsschaltungen mehrerer DMS.
Werkstoffe für Dehnungsmessstreifen
In Tabelle 6.2 sind die wichtigsten Werkstoffe bzw. Legierungen für Dehnungsmessstreifen mit
ihren k-Faktoren und Stoffgrößen aufgeführt.
Tabelle 6.2: Werkstoffe für Dehnungsmessstreifen
Konstantan
Zusammensetzung
k - Faktor
Platin
54% Cu,
45% Ni,
1% Mn
2,0
6,0
Karma
Platin-Iridium
74% Ni,
20% Cr,
3% Fe, 3% Al
90% Pt,
10% Ir
2,0
6,0
< 200
5⋅10-3
Thermischer
Ausdehnungskoeffizient
[1/K]
1,2⋅10-5
Temperaturkoeffizient des
Widerstandes
[1/K]
-3⋅10-5
1,3⋅10-3
1⋅10-4
3,8⋅10-3
0,49
0,1
1,6
0,25
Spezifischer
Widerstand in
Halbleiterwekstoffe
1,3⋅10-5
2
[Ωmm /m]
Ergänzende Bemerkungen zu den einzelnen Werkstoffen:
Platin-Iridium:
Es ist sehr empfindlich (k = 6). Es ist bis zu hohen Temperaturen einsetzbar
(T < 1000°C).
Platin:
Es ist ein sehr teures Material.
127
Konstantan:
Karma:
Es ist hysteresefrei und linear. Es hat einen thermischen Ausdehnungskoeffizienten wie Stahl. Dadurch wird ein Loslösen der Streifen aufgrund
unterschiedlicher Ausdehnung, infolge thermischer Belastung, vermieden.
Der Temperaturkoeffizient des elektrischen Widerstandes ist klein und somit auch der Temperatureinfluss.
Es hat einen hohen spezifischen Widerstand. Es ist daher einsetzbar für
kleine Dehnungsmessstreifen (∆R ~ R).
Halbleiterwerkstoffe: Sie sind nicht ganz linear und zeigen einen starken Temperatureinfluss. Der
angegebene Faktor ist ein mittlerer Wert. Er ist auch temperaturabhängig.
Der thermische Ausdehnungskoeffizient und der Temperaturkoeffizient des elektrischen Widerstandes müssen möglichst klein sein, um den Temperatureinfluss gering zu halten. Je größer der
spezifische Widerstand ist, desto kleiner kann der Dehnungsmessstreifen ausgelegt werden, wobei
noch eine meßbare Widerstandsänderung erreicht werden muss. Man muss auch beachten, dass der
Einfluß des Isolationswiderstandes um so größer wird, je hochohmiger das Messgitter selbst ist.
Typische Nennwiderstände von DMS liegen in der Größenordnung von 120 Ω, 350 Ω und 600 Ω.
Halbleiter-Dehnungsmessstreifen
Der wesentliche Unterschied zwischen Halbleiter-Dehnungsmesser und Ohmschen
Dehnungsmessstreifen besteht darin, dass an Stelle des Widerstandsdrahtes ein langgestreckter
Halbleiter-Einkristall verwendet wird. Auch hier gilt die Kennlinie:
∆R
∆ρ l ∆l
= 1 + 2µ +
⋅
R
ρ ∆l l
(6.60)
Während bei den Ohmschen DMS der Volumeneffekt (1 + 2 µ) überwiegt, macht sich bei den
Halbleitermessaufnahmen der Ausdruck
∆ρ l
ρ ∆l
stark bemerkbar, so dass 1 + 2 µ praktisch vernachlässigbar ist. Die k-Werte liegen zwischen ca.
100 und 200. Halbleitermessaufnehmer besitzen damit gegenüber herkömmlichen DMS eine
wesentlich größere Messempfindlichkeit. Ein Nachteil ist ihre Nichtlinearität und der hohe Preis.
6.5.2 Piezoelektrischer Fühler
Piezoelektrisch wirksame dielektrische Stoffe sind elektrisch polarisiert, d.h. die positiven und
negativen Ladungen sind unsymmetrisch verteilt. Bei einer Dehnung oder Stauchung von diesen
128
Stoffen ändern sich die Dipolmomente und durch die damit verbundene Änderung der Polarisation
werden an der Oberfläche Ladungen frei. Die Anzahl der Ladungen ist ein Maß für die mechanische Kraft. Feuerzeuge und Gasanzünder arbeiten nach diesen Prinzip. Stoffe mit diesen dielektrischen Eigenschaften sind: Quarz, Turmalin, Bariumtitanat.
Der piezoelektrische Effekt ist reversibel. Ein dielektrischer Stoff unterliegt in einem elektrischen
Feld einer Verformung (Elektrostriktion). Geschieht die Polarisation eines dielektrischen Körpers
durch Temperaturänderung liegt ein pyroelektrischer Effekt vor.
F
Metallisierte
Oberfläche
[Elektrode]
++++++++++++
Einkristall
-----------------
F
Abbildung 6.26: Aufbau eines piezoelektrischen Gebers
Wirkt eine Kraft auf die Quarzscheibe, so wird die Ladung Q frei.
Q = P⋅ A
(6.61)
Die elektrische Polarisation P wird als Ladung pro Flächeneinheit definiert.
Ohne elektrisches Feld gilt:
P = k ⋅σ
(6.62)
σ
=ˆ
mechanische Spannung [N/mm2]
k
=ˆ
Piezomodul; k = 2,3⋅10-12 As/N für Quarz
Mit Gl. (6.61), (6.62)und σ = F / A folgt
Q = P ⋅ A = k ⋅σ ⋅ A = k ⋅ F
129
(6.63)
Die Ladung nimmt proportional zur wirkenden Kraft zu. Der Quarz lässt sich als
Plattenkondensator auffassen, der sich unter dem Einfluss der Kraft F infolge der freigesetzten
Ladung Q auf die Spannung Uq auflädt.
Uq =
Q P⋅ A P⋅d
=
=
ε 0ε r
Cq
Cq
(6.64)
d =ˆ Elekrodenabstand
Es handelt sich um einen aktiven Geber (keine Hilfsspannung). Das Ersatzschaltbild eines derartigen Quarzes ist eine Stromquelle mit dem Kurzschlussstrom
i=
dQ
dF
=k⋅
dt
dt
(6.65)
sowie dem Innenwiderstand Rq und der Kapazität Cq .
K1
i
Rq
Cq
Uq
Abbildung 6.27: Ersatzschaltbild eines piezoelektrischen Gebers
Der Widerstand berechnet sich aus den Abmessungen und dem spezifischen Widerstand, die Kapazität aus den Abmessungen und der relativen Dielektrizitätszahl.
Rq =
Cq =
d ⋅ρ
A
(6.66)
ε 0ε r A
(6.67)
d
Zeitverhalten
Die durch die wirkende Kraft getrennten Ladungen bleiben nicht beliebig lange auf den Elektroden
sitzen, sondern versuchen sich über den Innenwiderstand Rq und über den Innenwiderstand des
angeschlossenen Messumformers bzw. der Zuleitungen auszugleichen. Für den Knoten K1 gilt:
130
dU q
dQ U q
−
− Cq
=0
dt Rq
dt
(6.68)
Die Lösung obiger inhomogener Differentialgleichung 1. Ordnung setzt sich aus der partikulären
und homogenen Lösung zusammen. Die partikuläre Lösung ist Uq,p = 0 .
Die Lösung der homogenen Gleichung
U q ,h = K ⋅ e
(
− t / RqCq
)
geschieht mit Hilfe der Randbedingung Uq(t = 0) = Q0 / Cq. K ist somit Q0 / Cq.
F
0
t
Uq
Q0 /Cq
0
RqCq
t
Abbildung 6.28: Sprungantwort eines piezoelektrischen Gebers
Die gesamte Lösung lautet:
Uq =
−t
Q0
⋅ exp
für t > 0
Cq
R
C
q
q
(6.69)
Die Zeitkonstante ist:
τ = Rq Cq
(6.70)
Die Empfindlichkeit des Gebers kann dadurch erhöht werden, dass man zwei Kristallscheiben gemäß Abbildung 6.29 zusammenschaltet.
F
Schirm des
Messkabels
+++++++
------------------+++++++
131
F
Abbildung 6.29: Aufbau eines piezoelektrischen Aufnehmers mit zwei Kristallen
Jede Quarzscheibe liefert die Ladung Q, so dass insgesamt 2Q Ladungen entstehen. Die
Kapazitäten der beiden Scheiben liegen parallel und die Gesamtkapazität des Aufnehmers ist
doppelt so groß wie die einer Scheibe.
2i
Rq
2
2Cq
Uq
Abbildung 6.30: Ersatzschaltbild eines piezoelektrischen Aufnehmers mit zwei Kristallen
Wird bei dem Aufnehmer mit zwei entgegengesetzten Kristallen nicht die erzeugte Ladung, sondern die Spannung gemessen, so ist sie mit
Uq =
2Q
Q
=
2Cq C q
auch nicht größer als bei dem einfachen Aufnehmer aus Abbildung 6.26.
Piezoresistiver Effekt
Die Änderung des spezifischen Widerstandes eines Festkörpers unter dem Einfluss mechanischer
Deformation wird als piezoresistiver Effekt bezeichnet. Er findet Anwendung bei piezoresistiven
Drucksensoren, bei denen wie bei kapazitiven Drucksensoren die Verformung einer Membrane
gemessen wird. Beim piezoresistiven Drucksensor sind Widerstände aus piezoresistivem Material
in die Membrane eingearbeitet, die unter dem Einfluß der Materialdehnung beim Durchbiegen der
Membrane ihren Widerstand ändern.
•
Membran → Messung der Verformung
•
Widerstände aus piezoresistivem Material werden in die Membrane eingearbeitet
⇒ z. B. durch lokale Dotierung einer monokristallinen Siliziummembran
(piezoresistive Eigenschaften von Silizium)
Vorteil gegenüber kapazitiven Drucksensoren:
132
Ein piezoresistiver Drucksensor liefert als Ausgangssignal eine elektrische Spannung, die mit einfachen Mitteln messbar ist. Ein kapazitiver Drucksensor ist nur in Verbindung mit einer geeigneten
integrierten oder externen Ausleseelektronik einsetzbar, da kleine Kapazitäten mit herkömmlichen
Mitteln nur schwer messbar sind.
6.5.3 Magnetoelastischer Kraftmessfühler
Der magnetoelastische Effekt:
Der magnetoelastische Effekt kennzeichnet den Zusammenhang zwischen magnetischen und
mechanischen Eigenschaften ferromagnetischer Materialien. Er lässt sich auf zweierlei Weise nutzen:
Magnetostriktion:
Formänderung eines ferromagnetischen Materials durch Einwirkung eines äußeren Magnetfeldes.
Magnetoelastik:
Änderung der magnetischen Eigenschaften unter Einwirkung äußerer Materialspannungen.
Beide Effekte können auf eine Ausrichtung der Weiß'schen Bezirke in ferromagnetischen Materialien zurückgeführt werden. Bei magnetoelastischen Fühlern wird die Veränderung der relativen
Permeabilität µr infolge der mechanischen Spannung σ ausgenutzt, um die Induktivität L einer
Spule zu verstimmen. Über diese Verstimmung sind die im Eisenkern herrschenden Spannungen zu
erkennen. Für die Kraft F, welche auf den Eisenkern wirkt, gilt:
F = A ⋅σ
(6.71)
wobei A die Querschnittsfläche ist.
Der Zusammenhang zwischen L und µr ist linear und lautet für eine einfache Spule mit Eisenkern
und w Windungen:
w2 µ0 µ r AEi
L=
l
AEi =ˆ
µ0
µr
l
=ˆ
=ˆ
=ˆ
(6.72)
Querschnittsfläche des Eisenkerns
magnetische Feldkonstante; µ0 = 1,256 ⋅10-6 Vs/Am
Permeabilitätszahl (Materialkonstante)
Länge der Spule
133
Im Gegensatz dazu ist der Zusammenhang zwischen der mechanischen Spannung σ und der Permeabilität µr leicht nichtlinear.
30
%
25
20
∆µγ 15
µγ
10
5
0
0
50
150 N/mm2 200
100
σ
Abbildung 6.31: Änderung von µr bei einer Ni-Fe-Legierung in Abhängigkeit von σ
Der magnetoelastische Geber in Abbildung 6.32 kann nur die Veränderung der Spuleninduktivität
L messen, da er ohne Hilfsstrom betrieben wird.
F
Φ;H;B
σ
A
L
µr
Abbildung 6.32: Magnetoelastischer Kraftmessfühler
Der Pressduktor in Abbildung 6.33 besteht aus einem Blechpaket, in dem zwei sich kreuzende Spulen angeordnet sind. Erzeugt man nun in einer der beiden Spulen ein magnetisches Wechselfeld, so
bilden sich die Feldlinien gemäß der Abbildung 6.34 aus.
Dabei wird in der zweiten Spule, der Sekundärspule, im unbelasteten Zustand keine Spannung induziert (Uind = 0). Belastet man nun dieses Blechpaket durch äußere Kräfte, so sinkt als Folge des
magnetoelastischen Effektes die Permeabilität, wodurch eine Ablenkung der magnetischen Feldlinien quer zur Kraftrichtung erfolgt. Durch diese Verzerrung schneiden nun die Feldlinien die Se134
kundärspule und induzieren somit in ihr eine Spannung, die annähernd proportional der Belastung
ist.
F
3
2
1
U
1 Spule
2 Spule
3 Blechpaket
F
Abbildung 6.33: Pressduktor (Magnetischer Kraftmessfühler)
135
F=0
F=0
a) mechanisch belasteter
Zustand
a) mechanisch unbelasteter
Zustand
Abbildung 6.34: Feldlinienverlauf in einem Pressduktor
6.6 Fühler zur Temperaturmessung
6.6.1 Thermoelement
Zwei unterschiedliche Materialien A und B bilden folgenden Stromkreis:
U
A
A
U1
U2
B
1;T1
2;T2
Abbildung 6.35: Prinzipschaltung eines Thermoelements
A ist mit B an der Stelle 1 und B ist mit A an der Stelle 2 verlötet oder verschweißt. Die Temperaturen der Verbindungsstellen sind T1 und T2. Unterscheiden sich diese, so entsteht zwischen den
Klemmen eine Spannung U, die sogenannte Thermospannung. An der Berührungsstelle zweier
Metalle treten Elektronen von einem in das andere Metall über. Maßgebend für diesen Vorgang ist
die Austrittsarbeit der Elektronen. Das Metall mit der geringeren Austrittsarbeit gibt Elektronen ab
und wird positiv. Auf der Grenzfläche beider Metalle bildet sich ein elektrisches Feld, dem zufolge
werden Elektronen wieder zurückgezogen. Stellt sich an dem Berührungspunkt 1 ein stabiler Zu136
stand ein, bildet sich die Kontaktspannung U1, die nach der Boltzmann-Verteilung der Temperatur
T1 und dem Verhältnis der Elektronenzahldichten nA und nB proportional ist:
k
n
U l = ⋅ ln A ⋅ T1 = K AB ⋅ T1
nB
e0
(6.73)
Die in der Klammer stehenden Terme lassen sich zu einer Materialkonstanten KAB zusammenfassen.
Für die Lötstelle 2 gilt entsprechend:
U 2 = K BA ⋅ T2
(6.74)
Die Summe der beiden Kontaktspannungen U1 und U2 ergibt die Thermospannung U.
Aus der Maschengleichung
U1 + U 2 − U = 0
(6.75)
U = U1 + U 2 = K AB ⋅ T1 + K BA ⋅ T2
(6.76)
folgt:
Bei Temperaturgleichheit (T1 = T2) tritt keine Thermospannung auf, U=0.
U1 = −U 2
K AB ⋅ T1 = − K BA ⋅ T1
(6.77)
K AB = − K BA
Der allgemeine Fall ist aber, dass T1 ≠ T2 ist.
Damit folgt aus der letzten Beziehung für die Berechnung der Thermospannung
U = U 1 + U 2 = K AB ⋅ (T1 − T2 )
(6.78)
Die entstandene Thermospannung hängt von den Werkstoffen A und B ab und wächst mit der Temperaturdifferenz T1 - T2 zwischen den Verbindungsstellen 1 und 2.
137
Um die Materialkonstante KAB nicht für alle möglichen Werkstoffkombinationen angeben zu müssen, hat man die thermoelektrische Spannungsreihe zusammengestellt. Hier wurden die Empfindlichkeiten der einzelnen Materialien gegenüber Platin für eine Temperaturänderung von 0°C auf
100°C ermittelt.
Tabelle 6.3: Thermoelektrische Spannungsreihe
Material X
KXPt in [mV/100 K]
Konstantan (CuNi)
Nickel (Ni)
Palladium (Pd)
Platin (Pt)
Wolfram (W)
Platinrhodium (PtRh)
Kupfer (Cu)
Manganin (CuMnNi)
Eisen (Fe)
Nickelchrom (NiCr)
Silizium (Si)
-3,47…-3,04
-1,94…-1,2
-0,28
0,0
0,7
0,65
0,7
0,57…0,82
1,9
2,2
44
Thermoelektrische Spannungsreihe
Die thermoelektrische Spannungsreihe gibt die Spannung an, die an einem Thermopaar anliegt,
wenn der eine Schenkel aus Platin und der andere aus dem zu untersuchenden Werkstoff besteht.
Dabei befindet sich die Messstelle auf einer Temperatur von 100°C und die Vergleichsstelle auf
einer Temperatur von 0°C. Die gemessene Thermospannung ist charakteristisch für das Material
des zweiten Thermoschenkels.
Die Thermoempfindlichkeit von einem Stoff A zu einem Stoff B, beschrieben durch die Materialkonstante KAB, ergibt sich dann als Differenz der Empfindlichkeit KAPt und KBPt.
K AB = K APt − K BPt
(6.79)
Für ein Thermoelement mit Schenkeln aus Eisen (Fe) und Konstantan (Ko) wird dementsprechend
K FeKo = K FePt − K KoPt = 1,9
mV
mV
mV
− − 3,47
= 5,37
100 K
100 K
100 K
(6.80)
Die Thermospannungen gebräuchlichster Thermopaare bei der Vergleichsstellentemperatur von
0°C sind in DIN 43710 angegeben.
138
Die Gl. (6.78) gibt einen streng linearen Zusammenhang zwischen Temperaturdifferenz und Thermospannung an. Eine sehr ausführliche Ableitung des thermoelektrischen Effektes zeigt jedoch,
dass Polynome höherer Ordnung notwendig sein können. Diese sind der DIN IEC 584 oder DIN
43710 zu entnehmen. In Abbildung 6.36 sind die Nichtlinearitäten gebräuchlicher Thermopaare zu
erkennen.
80
NiCr-CuNi
mV
Fe-CuNi
60
NiCr-Ni
U 40
20
Pt 30%Rh-Pt 6%Rh
-270
0
-10
300
600
900 1200 1500 °C 1800
T
Abbildung 6.36: Kennlinien von Thermoelementen
Tabelle 6.4: Werkstoffe und Eigenschaften von Thermoelementen
Werkstoffe
KupferKonstantan
Zusammensetzung
Messbereich [°C]
Cu - 55% Cu 45% Ni
-200…+500
Eisen
Konstantan
- Fe
55% Cu 45% Ni
Nickelchrom
Nickel
- 85% Ni 12% Cr 3% Zusätze
–Ni
Platinrhodium
Platin
- 90% Pt
Pt
10% Rh
-
Sonstige Eigenschaften
Anwendung
besonders
Temperaturen
bei
tiefen
-200+500
Bei
hohen
Temperaturen und in
nicht
oxidierender
Atmosphäre
0…1000
Für oxidierende Gase
beständig
sehr genau,
0…1300
empfindlich
(…1600 mit begrenzter
Wasserstoff
Lebensdauer)
Schwefel
gegen
und
Die Thermospannungen der gefertigten Thermopaare dürfen von den Grundwerten der Norm bis zu
einem maximalen Wert abweichen. In der DIN IEC 584 sind die einzelnen Grenzabweichungen für
139
verschiedene Thermopaare und Temperaturbereiche definiert. Die Tabelle 6.4 zeigt für gängige
Thermoelemente den einsetzbaren Messbereich und sonstige Eigenschaften.
In der Praxis wird meist von den Thermodrähten A, B zunächst auf die Messleitungen übergegangen. Da die zusätzlichen Messleitungen nicht aus den Thermoelementmaterialien bestehen, entsteht
in diesen Verbindungsstellen zum Messgerät eine Thermospannung.
T1
C
A
U1
Tm
Um
U
U2
C
B
T2
Abbildung 6.37: Thermoelementkreis mit drei unterschiedlichen Materialien A,B,C
Für den gezeigten Kreis ergibt sich die Spannung U als Summe der drei Einzelspannungen:
U1 = KCA ⋅ T1 = (K CPt − K APt ) ⋅ T1
U m = K AB ⋅ Tm = (K APt − K BPt ) ⋅ Tm
U 2 = K BC ⋅ T2 = (K BPt − K CPt ) ⋅ T2
(6.81)
U = K CPt (T1 − T2 ) + K APt (Tm − T1 ) + K BPt (T2 − Tm )
(6.82)
zu
Für den Fall, dass die Temperaturen der Verbindungsstellen 1 und 2 gleich sind, gilt
T1 = T2 = T0
und es bleibt folgender Ausdruck übrig:
U = K APt (Tm − T0 ) + K BPt (T0 − Tm )
= K AB (Tm − T0 )
(6.83)
Das Thermoelement liegt auf der Messtemperatur Tm. Die Thermospannungen an den
Messleitungen heben sich gegenseitig auf, solange die Verbindungsstellen dieselbe Temperatur
T1 = T2 = T0 haben. U hängt dann nur von der Materialpaarung A,B des Thermoelements und von
der Temperaturdifferenz Tm - T0 ab. Bei der Überbrückung eines größeren Abstandes zwischen
140
Thermoelement und Messeinrichtung durch Ausgleichsleitungen müssen folgende Gesichtspunkte
berücksichtigt werden:
•
Ausgleichsleitungen gleicher thermoelektrischer Eigenschaften wie Thermodrähte,
damit keine Thermospannungen an den Verbindungsstellen selbst entsteht,
•
es ist ein größerer Querschnitt zu wählen, damit der elektrische Widerstand möglichst
klein wird.
U
Cu
Cu
T0
1
A
2
B
Tm
Abbildung 6.38: Ausführung eines Thermoelements mit der Vergleichsstellentemperatur T0
6.6.2 Vergleichsstelle für Temperaturen
Die Thermospannung ist proportional der Temperaturdifferenz zwischen Tm der heißen Lötstelle
und T0 der Anschlusspunkte. Zur Bestimmung von TmµßT0 bekannt sein. Hierzu benötigt man entweder eine Thermostatschaltung oder eine Korrekturschaltung. Bei der Thermostatschaltung wird
die Temperatur im Innern eines Thermostaten auf einen konstanten Wert von 50, 60 oder 0°C geregelt. Dort sitzen die Klemmen, in denen die Thermodrähte mit den Kupferleitungen verbunden
sind.
U
T0
Tm
Abbildung 6.39: Vergleichsstelle mit einem Thermostaten
141
Wird die Korrekturschaltung angewendet, so darf die Temperatur der Vergleichsstelle schwanken. Bei einer Änderung von T0 wird eine Zusatzspannung Ud erzeugt und zur Thermospannung U
addiert, so dass die Summe Ud + U konstant bleibt. Dazu wird eine Brücke mit einem temperaturempfindlichen Widerstand ausgestattet und für eine bestimmte Umgebungstemperatur T0 abgeglichen, so dass Ud (T0) = 0 ist. Ändert sich T0, so wird die Brücke verstimmt, und die Brückenspannung nimmt mit T0 zu. Umgekehrt dazu verhält sich die entstandene Thermospannung. Diese
wird mit steigender Umgebungstemperatur kleiner und bei fallender entsprechend größer. Die
Brücke ist so ausgelegt, dass sie dieselbe Empfindlichkeit wie das zugehörige Thermoelement
erreicht. Dadurch gleichen sich die beiden gegenläufigen Effekte aus und die Summe Ud + U ist so
groß wie das Signal eines Thermoelements, dessen Vergleichsstelle konstant auf T0 gehalten wird.
Ud + U
Ud
U
Abbildung 6.40: Vergleichsstelle mit einer Korrekturschaltung
Ausführungsformen von Thermoelementen
Thermoelementpaare können unmittelbar mit den zu messenden Stoff in Berührung gebracht werden. Die Thermoelemente werden mit Schutzrohren versehen, die mechanische Beschädigungen
und Korrosion vermeiden sollen. Die Schutzrohre sind aus Messing, Stahl oder Keramik.
In der elektrischen Ersatzschaltung ist die Thermospannung gleich der Leerlaufspannung einer
Spannungsquelle zu setzen. Der Innenwiderstand der Quelle liegt zwischen einigen Ohm bis zu kΩ.
Das Zeitverhalten des Thermoelements hängt vom Wärmeübergang von dem zu messenden
Medium auf den Temperaturfühler und von dessen Wärmekapazität und Wärmeleitfähigkeit ab. In
einer strömenden Flüssigkeit ist die Anzeigeverzögerung geringer als in einem stehenden Gas. Das
Zeitverhalten wird durch eine Differentialgleichung 1.Ordnung beschrieben.
6.6.3 Widerstandsthermometer
Häufiger als die in dem letzten Abschnitt vorgestellten Thermoelemente werden Widerstandsthermometer eingesetzt. Sie nutzen die Abhängigkeit des elektrischen Widerstandes von der Temperatur aus. In Metallen beruht ihre Wirkungsweise auf den frei beweglichen Elektronen, die bei zunehmender Temperatur mit den stärker schwingenden Metallionen zusammenstoßen. Die Bewegung der Elektronen wird behindert, was eine Steigerung des ohmschen Widerstands zur Folge hat.
142
Besitzt ein metallischer Leiter bei der Temperatur T0 den Widerstand R0, so nimmt er bei der Temperatur T den Widerstand RT an.
4
Heißleiter
Kaltleiter
RT
R0
3
Ni
2
Pt
1
0
-100
-50
0
+50
+100 °C +150
T
Abbildung 6.41: Physikalische Kennlinien der Temperaturabhängigkeit des elektrischen
Widerstandes verschiedener Werkstoffe
Die folgende Beziehung stellt den Ansatz für die Kennlinie eines Widerstandsthermometers dar.
[
RT = R0 1 + A(T − T0 ) + B(T − T0 )
RT
R0
A und B
=ˆ
=ˆ
=ˆ
2
]
(6.84)
Widerstand bei der Temperatur T
Widerstand bei der Vergleichstemperatur T0
Materialkonstanten
Der Zahlenwert der Materialkonstanten A ist ungefähr drei Zehnerpotenzen größer als der von B, so
dass bei geringen Temperaturdifferenzen der letzte Term der obigen Gleichung vernachlässigt werden darf.
Beispiele: Platin (-200°C bis 850°C)
A = 3,908⋅10-3°K-1; B = -0,58⋅10-6 K-2
Nickel (-60°C bis 180°C)
A = 5,48⋅10-3 K-1; B = 7,85 = 10-6 K-2
Für kleine Temperaturmessbereiche (von 0 - 100°C) kann auch mit dem mittleren Temperaturbeiwert α gearbeitet werden. Die Gl. (6.84) geht dann über in
143
RT = R0 [1 + α (T − T0 )]
(6.85)
Die hier angegebenen Werte beziehen sich auf ein Temperaturintervall zwischen 0 und 100°C, und
sie sind abhängig vom Reinheitsgrad des jeweiligen Metalls.
Platin
α = 3,85⋅10-3 K-1 … 3,92⋅10-3 K-1
Nickel α = 6,17⋅10-3 K-1 … 6,75⋅10-3 K-1
Kupfer α = 4,26⋅10-3 K-1 … 4,33⋅10-3 K-1
Die Empfindlichkeit E des metallischen Leiters ist:
E=
dRT
Ω
= R0α
dT
K
(6.86)
In der Technik werden überwiegend Nickel- und Platin-Widerstandsthermometer eingesetzt, da sie
mit konstanten und reproduzierbaren Widerstandswerten hergestellt werden können. Die Widerstandswerte sind genormt und betragen 100 Ω bei 0°C.
Ausführungsformen von Widerstandsthermometern
Platinwiderstandsthermometer
Ein Platindraht wird auf einem dünnen Glasröhrchen angebracht. Zum Schutz wird der Draht mit
einem weiteren Glasröhrchen umgeben. Bei einer anderen Variante liegen die Wicklungen lose in
zwei Kapillarrohren, so dass Spannungen im Draht vermieden werden.
Nickelwiderstandsthermometer
Der Nickeldraht wird auf ein Isoliermaterial gewickelt. Das Einschmelzen der Drähte wäre zu
teuer. Damit ist dieses Widerstandsthermometer äußeren Einflüssen gegenüber empfindlicher.
Filmwiderstandsthermometer
Das Filmwiderstandsthermometer besitzt statt einem Draht einen aufgedampften Film. Die Vorteile
dieses Widerstandsthermometers liegen in der einfacheren Fertigung, den kleineren Abmessungen
und im besseren Zeitverhalten.
Der Messstrom durch den Messwiderstand muss genügend klein gehalten werden, damit durch die
Eigenerwärmung des Fühlers die Messung nicht verfälscht wird (I < 10 mA). Die Empfindlichkeit
der Widerstandsthermometer ist weitaus höher als bei den Thermoelementen. Je kleiner das Wider144
standsthermometer ist, desto kleiner ist der erlaubte Messstrom. Die dynamische Eigenschaften des
Messfühlers, insbesondere die Einstellzeit, hängen vom Messstrom ab. Es ist ein Kompromiss zwischen dem zulässigen Messstrom und der erreichbaren Einstellzeit zu schließen. Das Widerstandsthermometer liefert eine über die räumliche Ausdehnung des Messfühlers gemittelte Temperatur,
wogegen das Thermoelement praktisch punktförmig misst.
6.6.4 Heißleiter
Bei Halbleitern sind die Valenzelektronen fester an die Atomkerne gebunden als bei Metallen. Die
Zahl der freien Ladungsträger ist zunächst gering, nimmt aber mit steigender Temperatur zu. Dadurch erniedrigt sich der elektrische Widerstand der Halbleiter. Diese in verschiedensten Formen
hergestellten Sensoren werden als NTC-Widerstände (Widerstände mit negativen Temperaturkoeffizienten), Heißleiter oder Thermistoren bezeichnet. In Abbildung 6.41 ist die Temperaturabhängigkeit des elektrischen Widerstandes verschiedener Werkstoffe gezeigt. Für die Abhängigkeit
des elektrischen Widerstandes R in [Ω] von der Temperatur T in [K] gilt näherungsweise die Formel
1 1
RT = R0 exp b −
T T0
b
R0
RT
=ˆ
=ˆ
=ˆ
(6.87)
Materialkonstante
Widerstand bei der Temperatur T0
Widerstand bei der Temperatur T
Mit K0 = R0⋅exp[-b/T0] lässt sich Gl. (6.87) umformen zu
b
RT = K 0 ⋅ exp
T
(6.88)
Daraus ergibt sich für die Empfindlichkeit E
E=
dRT
b
Ω
b b
= K 0 ⋅ exp ⋅ − 2 = − 2 R0
dT
K
T
T T
(6.89)
Mit steigender Temperatur werden die Widerstandsänderungen immer geringer und der Temperaturkoeffizient α ist
α=
1 dRT
1
b b
RT − 2 ≈ − 2
=
R0 dT
R0 T T
(6.90)
Hier gilt (RT / R0 ≈ 1). Der Temperaturkoeffizient eines Heißleiters ist also negativ und stark von
der Temperatur abhängig.
145
V
T
R= U =25
66 0
5 K
kΩ
102
T
U
R= =30
50 0 K
kΩ
T
U=
R= 350
8
kΩ K
U(I)-Kennlinie des Heißleiters
101
U
100
1
P=
0m
W
10-1
10-2
10-1
100
101 mA 102
I
Abbildung 6.42: U(I)-Kennlinien eines Heißleiters
Wird ein Strom wird durch den Heißleiter geschickt und der Spannungsabfall gemessen, besteht
zunächst eine Proportionalität zwischen durchfließenden Strom I und abfallender Spannung U. Die
Leistungszufuhr ist so gering, dass der Widerstand nur durch die Umgebungstemperatur bestimmt
wird. Mit zunehmenden Strom erwärmt sich der Heißleiter, sein Widerstand nimmt ab und die
Spannung steigt damit weniger schnell als der zugehörige Strom. In einem kleinen Bereich wird die
Stromzunahme durch eine Widerstandsabnahme kompensiert und die Spannung bleibt ungefähr
konstant. Wird die Widerstandsabnahme größer als die Stromzunahme, fällt die Spannung wieder.
Bei höheren Umgebungstemperaturen ist der Widerstand des Heißleiters geringer und die Erwärmung beginnt erst bei größeren Strömen. Die Temperaturmessungen sind nur in dem ohmschen
Bereich der Kennlinie möglich. Nur dort ist der Widerstand des Heißleiters ein Maß für die Umgebungstemperatur.
6.7 Fühler für chemische Substanzen und zur Gasanalyse
Die typischen Messprinzipien, welche zur Gasanalyse ausgenutzt werden, beruhen entweder auf
den unterschiedlichen Wärmeleitfähigkeiten oder auf den Absorptionseigenschaften der zu
analysierenden Gase. Die bei der Messung eingesetzten Fühler benutzen häufig die Temperatur als
Zwischengröße, die dann in ein elektrisches Ausgangssignal umgeformt wird.
146
6.7.1 Kohlendioxidmesser nach dem Wärmeleitverfahren
Beim Kohlendioxidmesser (Rauchgasprüfer) wird die Wärmeleitfähigkeit von CO2 mit der von
Luft verglichen. Ein elektrisch beheizter Draht nimmt eine um so höhere Temperatur an, je geringer
die Wärmeleitfähigkeit des ihn umgebenden Gases ist. Jeder Temperatur entspricht ein bestimmter
Widerstandswert des Heizdrahtes. Das Vergleichsgas Luft ist den gleichen Einflussgrößen
(Temperatur, Feuchtigkeit) unterworfen wie das Messgas. In Abbildung 6.43 ist ein Kammerblock
eines Kohlendioxidmessers dargestellt. Als Messschaltung wird eine Wheatstonesche Brücke
benutzt, deren Widerstände aus Platindrähten bestehen. Je zwei dieser geheizten Messdrähte
befinden sich in den Kammern die mit dem Messgas (CO2) bzw. mit dem Vergleichsgas gefüllt
sind.
Vergleichskammern
Meßkammern
Vergleichsgas
( Luft )
Meßgas
( Rauchgas )
Abbildung 6.43: Kammerblock eines Kohlendioxidmessers
Gängige Kohlendioxidmesser sind für Messbereiche von 0 bis 20 Vol.% ausgelegt. Dabei entsprechen 20 Vol.% CO2 einem Temperaturanstieg um 6°C und einer Zunahme des Widerstands um
etwa 0,2 Ω.
Als Nachteil dieses Messverfahrens ist festzuhalten, dass es als Analyseverfahren wenig selektiv ist
und nur für binäre Gasgemische geeignet ist. Der Einfluß von Fremdgasen ist allerdings eineichbar,
wenn ihre Konzentration konstant bleibt.
6.7.2 Magnetischer Sauerstoffmesser
Ähnlich wie beim Kohlendioxidmesser wird auch beim magnetischen Sauerstoffmesser ein Hitzdraht als Fühler benutzt. Das Messprinzip wird hier durch den Paramagnetismus des Sauerstoffs
unterstützt. Unter den technisch wichtigen Gasen ist nur der Sauerstoff magnetisierbar, dieser
Effekt nimmt aber mit zunehmender Temperatur ab.
147
Meßgas
magnetischer
Wind
bifilarer
Hitzdraht
N
S
WeicheisenPolschuh
Dauermagnet
Abbildung 6.44: Messkammer eines magnetischen Sauerstoffmessers
Das Messgerät besteht aus vier miteinander verbundenen Messkammern, von denen zwei mit Permanentmagneten ausgestattet sind. Jede Kammer enthält einen Hitzdraht aus Platin, der elektrisch
auf etwa 300°C aufgeheizt wird. Durch die Hitzdrähte stellt sich in jeder Messkammer eine gleich
große Konvektionsströmung ein, die den jeweiligen Platindraht in gleicher Weise abkühlt.
Abbildung 6.44 zeigt einen Schnitt durch die Messkammer eines magnetischen Sauerstoffmessers.
Enthält das Messgas Sauerstoff, so wird die Strömung in den Kammern mit Permanentmagneten
beschleunigt, da die Dauermagneten den Sauerstoff anziehen. Durch die Erwärmung am Hitzdraht
verliert der Sauerstoff an Magnetisierbarkeit und kalter Sauerstoff, der seine paramagnetischen
Eigenschaften noch besitzt, drängt nach. Der Hitzdraht erfährt durch den zusätzlichen „magnetischen Wind“ eine stärkere Abkühlung und die Widerstandsänderung wird in einer Brückenschaltung gemessen.
Dieses Messverfahren ist gegenüber Fremdgasen sehr selektiv. Die übrigen Einflussgrößen wie
z. B. Druck und Temperatur können durch schaltungstechnische Maßnahmen in der Brücke
kompensiert werden.
6.7.3 Ionisations-Rauchmelder
Der Ionisations-Rauchmelder wird in automatischen Brandmeldeanlagen eingesetzt. Er besteht aus
zwei luftgefüllten Ionisationskammern, in denen ein radioaktives Präparat einen Strom von ca.
20 pA erzeugt. Die erste Kammer dient als Messkammer und wird von Raumluft durchströmt, während die zweite Kammer luftdicht abgeschlossen sein muss, da sie als Bezugskammer benutzt wird.
Bei einem auftretenden Brand werden sich in der Messkammer Ionen auf den Rauchpartikeln anla148
gern. Die sehr viel schwereren Rauchpartikel bewegen sich in dem elektrischen Feld viel langsamer
als die Ionen, was eine Reduzierung des Stroms in der Messkammer nach sich zieht.
Die Mess- und Vergleichskammer liegen hintereinander an einer Versorgungsspannung Uv. Infolge
dieser Reihenschaltung fließt durch beide Kammern immer derselbe Strom.
Ih
Um
Uv
Ur
Abbildung 6.45: Schaltbild eines Ionisations-Rauchmelders
Im Normalfalle sind die Kennlinien (Im, Ir) der Kammern gleich und die Versorgungsspannung teilt
sich etwa zur Hälfe auf beide Kammern auf (Arbeitspunkt a).
149
Im
Ir
Ir
Im1
a
Im2
b
0
∆Um
Um
Uv
Uv
Ur
0
Abbildung 6.46: Kennlinien eines Ionisations-Rauchmelders
Gelangen Rauchpartikel in die Messkammer, verschiebt sich die Kennlinie und der Strom geht von
Im1 auf Im2 zurück. b ist der neue Arbeitspunkt. Dass hat eine Zunahme der Spannung um ∆Um an
der Messkammer und entsprechend eine Abnahme der Spannung an der Bezugskammer zur Folge.
Die Spannungsänderung ist das Messsignal, was ausgewertet wird. Stromänderungen aufgrund von
Luftdruck- oder Temperaturschwankungen, die sich auf beide Kammern auswirken, verschieben
nicht die Aufteilung der Versorgungsspannung und bleiben ohne Einfluß auf die Messung.
6.8 Fühler für strömungstechnische Größen
Bei der Messung einer Strömung oder
Volumendurchfluss bzw. der Volumenstrom
eines
Durchflusses
sind
grundsätzlich
der
V
V& =
t
m3
s
(6.91)
m
t
kg
s
(6.92)
und der Massenstrom
m& =
zu unterscheiden. Sie sind über die Dichte miteinander verknüpft (siehe Gl. 2.16).
6.8.1 Hitzdrahtanemometer
Das Hitzdrahtanemometer ist ein thermischer Massenstrommesser, bei dem ein beheizter Widerstandsdraht einer Gasströmung ausgesetzt und von dieser abgekühlt wird. Die abgeführte Wärme
150
ist proportional der Massenstromdichte [kg⋅m-2⋅s-1], aus der nach Multiplikation mit dem Rohrquerschnitt der gesamte Massenstrom [kg⋅s-1] folgt. Der Massendurchfluss wird also ohne eine zusätzliche Dichtemessung bestimmt. Der Hitzdraht liegt als Widerstand in einer Brücke und die Messungen selbst werden entweder bei konstantem Heizstrom oder bei konstanter Temperatur des
Hitzdrahtes durchgeführt. Im ersten Fall wird die Brückendiagonalspannung direkt gemessen. Im
zweiten Fall ist die Brückendiagonalspannung die Eingangsgröße eines Reglers, der der Temperaturverstimmung entgegenwirkt. Gemessen wird hier der Reglerausgangsstrom, der ein Maß für die
Strömungsgeschwindigkeit ist. Ein wichtiger Vorteil dieses Verfahrens ist das bessere dynamische
Verhalten während der Messung.
Differential-Hitzdrahtanemometer
Das Differential-Hitzdrahtanemometer erweitert den Messbereich in Richtung kleinerer Strömungsgeschwindigkeiten. Volumenströme der Größenordnung von 10-4 mm3⋅s-1 können noch erfaßt werden.
Das Differenzial-Anemometer besteht aus zwei dünnen, in der Strömung hintereinanderliegenden
Platindrähten, die beide beheizt werden. Sie sind thermisch gekoppelt, so dass bei einer Gasströmung das von dem ersten Draht erwärmte Gas zu dem zweiten Draht gelangt. Durch die Strömung
wird der erste Draht abgekühlt, der zweite wird erwärmt. Beide sind in der Messbrücke verschaltet,
deren Diagonalspannung für kleine Volumenströme linear von der Durchflussgeschwindigkeit v
abhängt.
U0
1
1
2
Ud
2
Abbildung 6.47: Differential-Hitzdrahtanemometer mit Brückenschaltung
6.8.2 Induktions-Durchflussmesser
Die Wirkungsweise des Induktions-Durchflussmessers beruht auf der Leitfähigkeit von Flüssigkeiten. Sie enthalten Ionen mit der Ladung q als Ladungsträger, die sich mit der strömenden Flüssigkeit bewegen. Besitzen die Ionen die Geschwindigkeit v und strömen sie durch ein senkrecht zu
ihrer Bewegungsrichtung stehendes magnetisches Feld B, so werden sie mit der Kraft
151
Fm = q ⋅ v ⋅ B
(6.93)
zur Seite abgelenkt. An den Wandungen des Rohres mit dem Durchmesser d sitzen isoliert Elektroden, an denen die abgelenkten Ionen abfließen können. Es entsteht ein elektrisches Feld E mit der
auf eine Ladung q wirkenden Kraft
Fe = q ⋅ E
(6.94)
Aus den obigen Gleichungen folgt
q⋅v⋅B = q⋅E = q⋅
U
d
(6.95)
somit gilt für die induzierte Spannung
U = d ⋅v⋅B
(6.96)
Das darauf basierende Durchflussmessverfahren über die magnetische Induktion ist im Prinzip im
folgenden Bild dargestellt.
U
.
V°
B
d
IV
B
Elektroden
V
ν
Abbildung 6.48: Prinzip der induktiven Durchflussmessung
Die strömende Flüssigkeit wird hier als Leiter angesehen, d.h., sie muss eine Mindestleitfähigkeit
von etwa 0,1 mS/m besitzen. Die meisten technischen Flüssigkeiten erfüllen diese Anforderungen,
z. B. Leitungswasser mit etwa 50 bis 80 mS/m. Destilliertes Wasser liegt mit etwa 0,1 mS/m an der
Grenze, Kohlenwasserstoffe sind ungeeignet.
152
Der wesentliche Vorteil liegt in dem linearen Zusammenhang und in der Tatsache, dass keine
Druckminderung durch Drosselgeräte oder Strömungskörper auftritt. Der Volumendurchfluss V&
als Produkt von Rohrquerschnitt π⋅d2/4 und der Geschwindigkeit v beträgt dann
π ⋅d2 ⋅v π d
V& =
= ⋅ ⋅U
4
4 B
(6.97)
Im Allgemeinen ist die induzierte Spannung U gering. Sie beträgt z. B. bei B = 0,1 T , d = 0,1 m
und v = 0,1 m/s nur 1 mV.
6.9 Fühler zur Strahlungsmessung
Photoelement und Photodiode gehören zusammen mit der Photozelle, dem Photomultiplier und
dem Photowiderstand zu den optoelektronischen Messgrößenumformern. Als Einheiten der lichttechnischen Größen verwendet man das Lumen und das Lux, die sich von der Basiseinheit Candela
ableiten lassen.
Das Lumen lm ist die Einheit des Lichtstromes Φ und das Lux lx ist die Einheit der Beleuchtungsstärke Ev. Die Beleuchtungsstärke Ev ist das Verhältnis aus dem Lichtstrom Φ und der beleuchteten
Fläche A:
Ev =
Φ
A
;
1lx =
1lm
m2
6.9.1 Photoelement und -diode
Das Photoelement ist ein Halbleiter mit einer p- und einer n-leitenden Zone. An der Schnittstelle
diffundieren die Defektelektronen (Löcher) in den n-leitenden Bereich und die Leitungselektronen
in den p-leitenden Bereich.
p
n
+
Defekt- und Leitungselektronen rekombinieren, so dass eine Zone ohne freie Ladungsträger, die
Sperrschicht, entsteht. Zudem bleiben zwei unkompensierte, geladene Bereiche über, zwischen
denen die sogenannte Diffusionsspannung UD liegt.
153
p
UD
+
+
n
-
Sperrschicht
Wird nun die Sperrschicht von Lichtquanten genügend hoher Energie getroffen, werden Elektronenbindungen zerstört und Elektronen werden vom Valenzband in das Leitungsband gehoben. Die
dadurch entstandenen Elektron-Loch-Paare werden durch das elektrische Feld in der Sperrschicht
(Raumladungszone) getrennt und fließen wieder zur n- bzw. p-leitenden Zone.
p
UD
n
+
Sperrschicht
In der Sperrschicht wird ein von der Beleuchtung abhängiger Driftstrom erzeugt. Er ist proportional
der Beleuchtungsstärke und kann gemessen werden, indem der pn-Halbleiter, mit Elektroden versehen, zu einem Stromkreis verbunden wird (innerer lichtelektrischer Effekt).
p
Anode
n
+
-
Kathode
IAK
Abbildung 6.49: Aufbau eines Photoelements
Als Halbleitermaterial dient neben Selen und Kupferoxydul heute hauptsächlich Silizium und Germanium. Die Eigenschaften des Photoelements sollen anhand seiner Kennlinien diskutiert werden.
Dargestellt sind in Abbildung 6.50 die Kennlinien für den gesamten möglichen Betriebsbereich.
Die im IV. Quadranten des Kennlinienfeldes verlaufenden Kurven charakterisieren die Betriebsart
„Element“. Möglich ist beim Elementbetrieb die Messung des Kurzschlußstromes IK bei UAK = 0.
Die entsprechenden Werte sind auf der negativen Ordinatenachse dargestellt. Der
Kurzschlussstrom steigt linear mit der Beleuchtungsstärke.
154
Wird die Leerlaufspannung UL des Elements gemessen, so fließt kein Strom IAK = 0. Für die verschiedenen Beleuchtungsstärken ergeben sich die auf der positiven Abzissenachse angegebenen
Spannungen. Sie steigen mit dem Logarithmus der Beleuchtungsstärke.
IAK
UAK I
AK
60
µA
40
II
I
20
UAK
0
-5
-4
-3
-2
EV=600 lx
0
-1
0.1
0.2
0.5
0.3
V
-20
EV=1200 lx
-40
EV=1800 lx
-60
R=10kΩ
R=10kΩ
III
IV
Abbildung 6.50: Kennlinienfeld einer Si-Photodiode
Dieses Verhalten lässt sich im Ersatzschaltbild durch eine Stromquelle darstellen, bei der nicht nur
der Kurzschlussstrom IK, sondern auch der Innenwiderstand Rq von der Beleuchtungsstärke
abhängt. Die Leerlaufspannung UL ergibt sich als Produkt aus dem Kurzschlussstrom IK und dem
Innenwiderstand Rq:
U L = I K ⋅ Rq
(6.98)
und steigt so weniger schnell als der Kurzschlussstrom.
IK
Rq
Cq
UL
Abbildung 6.51: Ersatzschaltbild eines Photoelements
Kurzschlussstrom (Ordinate) und Leerlaufspannung (Abszisse) begrenzen den Betriebsbereich
eines Photoelements. Dazwischen kann praktisch jeder Arbeitspunkt erreicht werden, indem das
Element mit einem Widerstand R belastet wird. In diesem Fall kann entweder der im Kreis
155
fließende Strom IR oder die am Widerstand abfallende Spannung UR gemessen werden. Beide
Größen hängen nichtlinear von der Beleuchtungsstärke ab.
IR
UR
UL
IK
b)
a)
c)
Abbildung 6.52: Betriebsarten vom Photoelement
a) Elementbetrieb, Messung des Kurzschlussstroms IK
b) Elementbetrieb, Messung der Leerlaufspannung UL
c) Elementbetrieb, Strom- oder Spannungsmessung in einem Kreis mit Lastwiderstand
Betrieb als Photodiode
Im Diodenbetrieb wird eine Spannung in Sperrrichtung an den Aufnehmer gelegt. Die im III. Quadranten des Kennlinienfeldes verlaufenden Kurven charakterisieren die Betriebsart „Diode“. Dadurch ändert sich, wie die Kennlinien zeigen, nicht der vom Aufnehmer gelieferte Strom. Ein
Lastwiderstand kann jetzt relativ groß gewählt werden, ohne dass der lineare Zusammenhang zwischen der Beleuchtungsstärke und dem im Messkreis fließenden Strom oder der am Widerstand
abfallenden Spannung verloren geht. Noch wichtiger aber ist, dass durch die Spannung in
Sperrrichtung die Breite der Raumladungszone zunimmt, womit die Kapazität der Diode sinkt.
Dadurch verbessert sich ihr Zeitverhalten. Photoelemente können Frequenzen von höchstens
einigen kHz folgen, wogegen Photodioden Frequenzen im MHz-Bereich zu messen gestatten.
IR
UR
+
-
Abbildung 6.53: Diodenbetrieb, Messung des Stromes oder der am Lastwiderstand abfallenden Spannung
156
6.9.2 Photozelle
Die Photozelle besteht aus einer evakuierten Glasröhre mit einer Kathode K und einer Anode A.
Treffen auf die Kathode Lichtquanten, deren Energie größer als die Austrittsarbeit der Elektronen
ist, so werden Elektronen freigesetzt (äußerer Photoeffekt). Die Elektronen werden unter dem Einfluß einer zwischen Kathode und Anode angelegten Spannung in Richtung Anode beschleunigt und
führen zu einem im äußeren Kreis messbaren Strom. Dieser ist bei einer bestimmten Wellenlänge
ein Maß für die Zahl der auftreffenden Lichtquanten und damit ein Maß für die Beleuchtungsstärke.
IR
15 4 MΩ
-
A
R=0
µA
UR
+
2 MΩ
10
0.5 lm
5
0.25 lm
I
K
0.05 lm
a)
b)
0
0
20
40
U
60
80 V 100
Abbildung 6.54: a) Aufbau und b) Kennlinie einer Photozelle
Hat die an der Photozelle anliegende Spannung eine bestimmte Größe erreicht, so ist der Strom
unabhängig von der Spannung und nimmt mit der Beleuchtungsstärke zu. Auch bei einer Belastung
der Photozelle mit einem Arbeitswiderstand R ist sowohl der im Stromkreis fließende Strom als
auch die am Arbeitswiderstand abfallende Spannung direkt proportional der Beleuchtungsstärke.
Die Empfindlichkeit ist konstant und beträgt etwa 10-3 µA/lx. Infolge der kurzen Laufzeit der
Elektronen zwischen Kathode und Anode sind die Photozellen sehr schnell; Lichtfrequenzen von
109 Hz können verarbeitet werden. Eine Verstärkung der Empfindlichkeit erreicht man durch Verwendung einer gasgefüllten Photozelle. Die Elektronen ionisieren auf ihrem Weg von Kathode zu
Anode Gasmoleküle. Dadurch werden weitere Elektronen frei, und es fließt ein größerer Strom.
Bezüglich der statischen Eigenschaften wird eine 3 bis 10-fach höhere Empfindlichkeit erreicht
aber auch eine geringere Lebensdauer bei hohen Spannungen. Der Nachteil gegenüber der evakuierten Photozelle liegt in der dynamischen Eigenschaft, da Frequenzen um 1000 Hz die oberen
Grenzen bilden.
157
6.9.3 Photomultiplier
Der Photomultiplier enthält zunächst wie die Hochvakuumphotozelle eine lichtempfindliche Kathode. Darüber hinaus sind jetzt mehrere Elektroden (Dynoden) vorhanden, die in Richtung Anode
an einer jeweils höheren Spannung liegen. Die in der Kathode von den Lichtquanten freigesetzten
Elektronen werden zur ersten Dynode beschleunigt. Dort wird der Effekt der „Sekundärelektronenemission“ wirksam. Jedes auftreffende Elektron löst im Mittel z Sekundärelektronen aus. Dieser
Vorgang setzt sich von Dynode zu Dynode fort, so dass bei insgesamt N Dynoden der Ausgangsstrom iA um den Faktor zN größer ist, als der Photostrom iK der Kathode:
i A = z N ⋅ iK
(6.99)
Der Photomultiplier ist sehr empfindlich. Verstärkerfaktoren bis zu 108 werden erreicht, und einzelne Lichtquanten können als Impulse nachgewiesen werden. In Abbildung 6.55 ist der Photomultiplier schematisch dargestellt.
2U
4U
6U
Photokathode
Anode
+
0
U
3U
Abbildung 6.55: Photomultiplier (schematisch)
158
5U
7U
7 Messumformer
7.1 Aufgabe der Messumformer
Bei der Signalumformung wird durch das entsprechende Glied der Messkette das Eingangssignal x
in ein Ausgangssignal y mit anderen Signalcharakteristiken umgewandelt. Dabei wird in jedem
Falle angestrebt, dass die zu übermittelnde Information möglichst unverändert vom Eingangs- auf
das Ausgangssignal übertragen werde.
Wie schon zu Beginn dieser Vorlesung erwähnt, besteht die Hauptaufgabe der Messumformer in
der Verstärkung und Normierung der von den Fühlern gelieferten, meist sehr kleinen
Ausgangssignale. Zugleich erfüllen Messumformer damit zusammenhängende Nebenaufgaben, wie
die Anpassung der elektrischen oder mechanischen Signale an den Eingang des Messverstärkers
und die Korrektur von Einflussgrößen, mit denen der Fühler behaftet ist.
Die Ausgangssignale der Fühler, d.h. die Eingangssignale der Messumformer, sind sehr verschiedenartig. Als elektrische Eingangssignale sind möglich:
Spannung U,
Strom I,
Widerstand R,
Ladung Q,
Frequenz f,
z. B. beim Thermoelement, beim induktiven Durchflussmesser;
z. B. bei der Ionisationskammer;
z. B. beim Widerstandsthermometer, beim DMS;
z. B. beim piezoelektrischen Sensor;
z. B. beim induktiven Drehzahlfühler und anderen digital anfallenden
Messgrößen.
Ein mechanisches Eingangssignal kann der Ausschlagwinkel α sein, den ein mechanisches Messwerk liefert.
7.2 Messverstärker
Die Brückendiagonalspannung Ud einer Wheatstoneschen Brücke entsteht als Differenz der ungefähr gleichgroßen Teilspannungen U1 und U2.
U d = U1 − U 2
(7.1)
Zur Verstärkung dieser oft sehr kleinen Spannungsdifferenz bieten sich verschiedene Messverstärker an. An einen Messverstärker werden die folgenden Forderungen gestellt:
159
•
Eine Rückwirkung des Messverstärkers auf die Messgröße sollte nach Möglichkeit nicht
auftreten. Seinen Eingangswiderstand muss man daher so auslegen, dass eine möglichst
geringe Belastung der Quelle (Messfühler) auftritt.
•
Bei einem Spannungsverstärker ist der Eingangswiderstand hochohmig im Vergleich zum
Innenwiderstand der Quelle auszulegen.
•
Bei einem Stromverstärker sollte der Eingangswiderstand entsprechend niederohmig im
Vergleich zum Innenwiderstand der Quelle ausfallen.
•
Das Ausgangssignal des Messverstärkers darf durch die weiteren angeschlossenen Geräte
nicht verändert werden (eingeprägtes Ausgangssignal).
Der Verstärkungsfaktor ist definiert als das Verhältnis von Ausgangs- zu Eingangsgröße. Das setzt
voraus, dass die Ausgangsgröße nur von der Eingangsgröße abhängt.
V=
y
x
(7.2)
x
y
Abbildung 7.1: Schaltsymbol eines Messverstärkers
Wir betrachten den Verstärker als einen von der Messgröße gesteuerten Generator. Im idealisierten
Fall erfolgt die Steuerung ohne eine Leistungsübertragung. Bei einer Spannungsmessung ist der
Eingangswiderstand des Verstärkers unendlich groß (Re → ∞), entsprechend gilt für eine Strommessung Re = 0. Der Verstärker benötigt immer eine externe Energieversorgung aus der auch die
am Verstärkerausgang abgegebene Leistung kommt.
U1
Re
VxU1
U2=V .U1
Abbildung 7.2: Ersatzschaltbild eines idealen Spannungsverstärkers
160
Außer den oben genannten Forderungen sollte ein Messverstärker auch die folgenden
Eigenschaften besitzen:
1. eine hohe Stabilität des Nullpunkts,
2. eine gute Reproduzierbarkeit,
3. und gute dynamische Übertragungseigenschaften.
7.2.1 Störgrößen bei Messverstärkern
Von besonderer Bedeutung im Hinblick auf Messfehler sind die Störeinflüsse, welche vor allem
aus der Umgebung auf Messobjekt und Messeinrichtung einwirken. Die Störgrößen z können am
Verstärkereingang, am Verstärker selbst und am Ausgang angreifen.
z1
z2
z3
y
x
Abbildung 7.3: Störgrößen bei Messverstärkern
Die Störgröße z1 am Eingang kann durch induktive Einstreuungen oder durch Thermospannungen
an der Eingangsschaltung hervorgerufen werden. Diese Störgröße wirkt sich besonders stark aus!
Zum einen weil das Eingangssignal gewöhnlich sehr energieschwach ist und zum zweiten, weil
diese Störgröße mit dem Nutzsignal verstärkt wird. Da sich diese Störgröße zum Eingangssignal
addiert, am Eingang liegt also x + z1 an, wird sie als additive Störgröße bezeichnet.
Umgebungseinflüsse, die eine Änderung der Bauelementeigenschaften und Schwankungen der
Versorgungsspannung und somit eine Änderung der Verstärkung bewirken, werden als multiplikativen Störgrößen bezeichnet. In Abbildung 7.3 sind sie durch z2 symbolisiert.
Eine weitere Art der multiplikativen Störgröße tritt am Ausgang des Messverstärkers auf, z. B. hervorgerufen durch Änderungen des Verbraucherwiderstandes. Da additive Störgrößen im Verstärker
und am Ausgang vernachlässigbar klein sind, werden sie bei der Beschreibung des Verstärkerverhalten nicht berücksichtigt.
y = ( x + z1 ) ⋅ V ( z2 ; z3 )
(7.3)
161
Um eine Verringerung des additiven Störgrößeneinflusses zu erreichen, werden
•
störungsarme Eingangsschaltungen,
•
Abschirmungen der Zuleitungen,
•
hochwertige Bauelemente,
•
konstante Hilfsspannungsquellen,
• und Modulationsverstärker zur Reduzierung der Nullpunktdrift
verwendet.
In Abbildung 7.4 ist ein solcher Modulationsverstärker als Blockschaltbild gegeben. Die Eingangsspannung wird in eine Wechselspannung umgewandelt, verstärkt und anschließend gleichgerichtet.
Die im Wechselspannungsverstärker entstehende Gleichspannungsdrift wird nicht mit verstärkt,
sondern durch Kondensatoren eliminiert.
Wechselspannungsverstärker
Modulator
(Chopper)
Phasenabhängiger
Gleichrichter
=
~
x
=
~
~
y
~
Modulationsfrequenz
Abbildung 7.4: Blockschaltbild eines Modulationsverstärkers
Eine Reduzierung der multiplikativen Störgrößen wird durch die Gegenkopplung erreicht. Die
Ausgangsgröße y wird zum Eingang des Verstärkers zurückgeführt und dort der Eingangsgröße x
entgegenschaltet.
x
_
x10
V0
y
y
y
y.G
G
Abbildung 7.5: Schaltbild eines gegengekoppelten Verstärkers
162
Die Verstärkung des offenen Verstärkers, ohne Gegenkopplung, ist
y = V0 ⋅ x10
(7.4)
Für das Eingangssignal x10 des offenen Verstärkers gilt
x10 = x − yG
(7.5)
y = ( x − yG )V0
(7.6)
Mit Gl. (7.4) folgt
Die Verstärkung des gegengekoppelten Verstärkers bestimmt sich somit zu:
V=
y ( x − yG )V0
=
x
x
y
= V0 ⋅ 1 − G
x
=
=
V0
1 + V0 ⋅ G
1
1
+G
V0
(7.7)
Hat der offene Verstärker eine sehr große Verstärkung (V0 → ∞), so gilt
y 1
=
(7.8)
x G
Die tatsächliche Verstärkung V des gegengekoppelten Messverstärkers ist in diesem Fall nur noch
V=
von dem Übertragungsfaktor G im Rückwärtszweig abhängig. Multiplikative Einflüsse, welche die
Verstärkung V0 des offenen Verstärkers ändern, gehen nicht in die Verstärkung V der
gegengekoppelten Anordnung ein. Additive Störgrößen können durch diese Folgeregelung nicht
eliminiert werden.
7.3 Brückenschaltungen
7.3.1 Abgleich-Widerstandsmessbrücke
Die 1843 von Wheatstone erstmals verwendete Messbrücke besteht aus vier Widerständen R1 bis
R4.
163
Sie sind so angeschlossen, dass sich zwei parallel geschaltete Spannungsteiler ergeben, die an der
Brückenspeisespannung U0 liegen.
U0
R2
R1
U1
Ud
U3
R4
R3
Abbildung 7.6: Wheatstonesche Messbrücke
Am Widerstand R1 fällt die Teilspannung
U1 = U 0 ⋅
R1
R1 + R2
(7.9)
ab und am Widerstand R3 wird die Teilspannung
U3 = U0 ⋅
R3
R3 + R4
(7.10)
abgegriffen. Die Diagonalspannung Ud der Brücke ergibt sich aus der Differenz der beiden Teilspannungen
U d = U 3 − U1 = U 0 ⋅
R2 R3 − R1R 4
(R1 + R2 ) ⋅ (R3 + R4 )
(7.11)
Ist die Diagonalspannung Ud der Brücke gleich null, so bezeichnet man die Brücke als abgeglichen.
Daraus folgt unmittelbar die Abgleichbedingung, da der Zähler der obigen Gleichung zu null wird.
R2 R3 = R1R 4
(7.12)
Diese Brückenschaltung kann auf unterschiedliche Art und Weise eingesetzt werden. Als AbgleichWiderstandsmessbrücke dient sie zur Bestimmung unbekannter Widerstände.
164
U0
R1
Rx
R4
Ud
R3
Abbildung 7.7: Abgleich-Widerstandsmessbrücke
Der gesuchte Widerstand Rx wird mit drei bekannten Widerständen in einer Brücke verschaltet,
wobei mindestens einer dieser drei Widerstände einstellbar ist. Wird der variable Widerstand R3 so
verändert, dass die Brücke abgeglichen ist (Ud = 0), folgt für den gesuchten Widerstand Rx
Rx =
R1 ⋅ R4
R3
(7.13)
7.3.2 Ausschlag-Widerstandsmessbrücke
Eine andere Möglichkeit die Brückenschaltung einzusetzen, bietet das Ausschlagverfahren. Die
Brücke ist in diesem Fall so ausgelegt, dass sie bei einem bestimmten Wert des interessierenden
Widerstandes abgeglichen ist. Änderungen dieses Widerstandes haben einen Ausschlag der Diagonalspannung zur Folge.
U0
Rx
R4
R1
Ud
R3
Abbildung 7.8: Widerstandsmessbrücke im Ausschlagverfahren
Die Diagonalspannung ist ein Maß für die Widerstandsänderung. Ein weiterer Vorteil des Ausschlagverfahrens besteht in der zeitlich kontinuierlichen Messung des Widerstandes. Eine Änderung des gesuchten Widerstandes mit der Zeit Rx = Rx(t) ergibt eine Diagonalspannung Ud = Ud(t),
die ebenfalls eine Funktion der Zeit ist.
Berechnet man die Diagonalspannung Ud nach Gl. (7.11) für die in Abbildung 7.8 dargestellte
Brückenschaltung mit den drei gleich großen Widerständen R, so gilt
165
U 0 Rx − R
=
⋅
2 Rx + R
1
R
U d = U 0 −
2 R + Rx
(7.14)
Um die Abhängigkeit der Diagonalspannung von Rx genauer zu untersuchen, werden verschiedene
Werte für den Widerstand Rx eingesetzt:
Rx = 0 :
Ud = −
Rx = R :
Ud = 0
Rx → ∞ :
U0
2
Ud = +
U0
2
U0
2
Ud
0
1
2
3
4
U0
2
Rx
R
Abbildung 7.9: Verlauf der Kennlinie in Abhängigkeit von Rx / R
Die Kennlinie verläuft also gekrümmt und die Empfindlichkeit dUd / dRx ist auch in der Nähe des
Arbeitspunktes Rx = R nicht konstant.
Die Höhe der Diagonalspannung ist immer ein Maß für die Verstimmung der Brücke. Wie stark die
Brücke verstimmt wird, hängt aber nicht nur von der Größe der Widerstände ab, sondern auch von
ihrer Anordnung in der Brückenschaltung. Die verschiedenen Anordnungen werden dabei als
Viertel-, Halb- oder Vollbrücke bezeichnet, je nachdem, ob 1 Widerstand, ob 2 oder alle 4 Widerstände einstellbar sind. Die Speisespannungen der einzelnen Brückenschaltungen seien jeweils
konstant. Es sollen die Diagonalspannungen für die verschiedenen Anordnungen berechnet werden.
Viertelbrücke
Die nicht näher bezeichneten Widerstände in der Brücke haben den Wert R und sind nicht variabel.
Widerstände, die mit einem + gekennzeichnet sind besitzen den Wert R + ∆R und entsprechend die
mit — markierten den Wert R - ∆R.
166
U0
R1
R2
+
Ud
R4
R3
Abbildung 7.10: Viertelbrücke
Ausgehend von der Grundgleichung für die Diagonalspannung (Gl.7.11)
Ud = U0 ⋅
R2 R3 − R1R4
(R1 + R2 ) ⋅ (R3 + R4 )
folgt mit R1 = R3 = R4 = R und R2 = R + ∆R aus Abbildung 7.10
Ud
(
R + ∆R )R − R 2
= U0 ⋅
(2 R + ∆R )2 R
= U0 ⋅
∆R
4 R + 2 ∆R
(7.15)
Im Nenner kann bei kleinen Widerstandsänderungen ∆R gegenüber R vernachlässigt werden, so
dass sich die Gleichung auf
Ud ≈
U 0 ∆R
4 R
(7.16)
reduzieren lässt. Die Diagonalspannung ist nur angenähert proportional zur Widerstandsänderung
∆R bezogen auf den Anfangswiderstand R.
Halbbrücke
U0
R2
+
R4
U0
R1
Ud
R2
+
R3
R4
_
+
a)
b)
Abbildung 7.11: Mögliche Verschaltungen der Halbbrücke
167
R1
Ud
R3
Werden in einer Messbrücke zwei veränderliche Widerstände eingesetzt, ist die entstehende Diagonalspannung doppelt so groß wie bei der Viertelbrücke. Am Beispiel der im Fall b) dargestellten
Halbbrücke folgt dann in bekannter Weise
Ud = U0 ⋅
(R + ∆R )R − R(R − ∆R ) = U ⋅ 2 R∆R
0
2
(2 R + ∆R ) ⋅ (2 R − ∆R )
4 R 2 − (∆R )
(7.17)
Bei kleinen Widerstandsänderungen ∆R gegenüber R folgt somit
Ud ≈
U 0 ∆R
2 R
(7.18)
Vollbrücke
U0
R1
R2
_
+
R4
_
Ud
R3
+
Abbildung 7.12: Vollbrücke
Die Schaltungsanordnung in Abbildung 7.12 zeigt eine mit vier variablen Widerständen ausgestattete Vollbrücke mit der vierfachen Empfindlichkeit einer Viertelbrücke.
Ud = U0
∆R
R
(7.19)
Brücke, mit konstantem Strom gespeist
Bei den bisher vorgestellten Brückenschaltungen wurde davon ausgegangen, dass die Speisespannung U0 stets konstant ist. Die Speisung der Brücke kann aber auch durch einen konstanten Strom
I0 erfolgen, der in der Parallelschaltung von (R1 + R2) mit (R3 + R4) zu einem Spannungsabfall
U0(I0) führt.
168
U0(I0)
R2
R4
R1
Ud
I0
R3
Abbildung 7.13: Brücke mit konstanter Stromspeisung
Der Spannungsabfall an der Parallelschaltung berechnet sich wie folgt
U 0 = I 0 [(R1 + R2 )
= I0
(R3 + R4 )]
(R + R2 ) ⋅ (R3 + R4 )
⋅ 1
(7.20)
R1 + R2 + R3 + R4
Wird dieser Ausdruck für U0 in die Grundgl. (7.11) der Diagonalspannung eingesetzt, ergibt sich
die Diagonalspannung der stromgespeisten Brücke zu
Ud = I0 ⋅
(R1 + R2 ) ⋅ (R3 + R4 ) ⋅
R1 + R2 + R3 + R4
R2 R3 − R1 R4
= I0 ⋅
R1 + R2 + R3 + R4
R2 R3 − R1 R4
(R1 + R2 ) ⋅ (R3 + R4 )
(7.21)
Sie ist proportional zu dem Speisestrom I0. Der Zähler ist derselbe wie bei der spannungsgespeisten
Brücke, aber im Nenner steht jetzt die Summe aller Widerstände.
Es werde nun angenommen, dass die in den Bildern Abbildung 7.10 bis Abbildung 7.12 dargestellten Brückenschaltungen durch eine Konstantstromquelle versorgt würden. Entsprechende Berechnungen zeigen, dass die Diagonalspannungen dann nicht mehr von ∆R/R, sondern nur noch von ∆R
allein abhängen.
Viertelbrücke:
Ud ≈
I0
⋅ ∆R
4
(7.22)
Ud ≈
I0
⋅ ∆R
2
(7.23)
U d = I 0 ⋅ ∆R
(7.24)
Halbbrücke:
Vollbrücke:
169
7.3.3 Wechselstrom-Messbrücken
Es lassen sich in der Realität keine idealen kapazitiven und induktiven Bauelemente produzieren.
Kondensatoren und Spulen besitzen immer einen rein ohmschen Widerstandsanteil, der beim
Stromdurchfluss zu Energieverlusten führt. In den Ersatzschaltbildern für Induktivitäten und Kapazitäten werden die rein ohmschen Widerstände (auch Wirkkomponente genannt) in Reihe oder
parallel zum Blindwiderstand gezeichnet. Der Blindwiderstand X ist abhängig von der Frequenz ω
der angelegten Spannung U.
UR
U
UL
I
UR
L
U
ϕ
R
C
IC
I
UL
IR
U
IC
I
ϕ
IR
I
U
RP
Abbildung 7.14: Reihen- und Parallel-Ersatzschaltung mit Zeigerdiagramm für verlustbehaftete induktive und kapazitive Widerstände
Der Scheinwiderstand Z (Impedanz) ist eine komplexe Größe und besteht aus der Wirkkomponente
R und dem Blindanteil X.
Z = R + jX
;
Z 2 = R2 + X 2
;
ϕ = arctan
(7.25)
In Polarform geschrieben
Z = Z ⋅ e jϕ
X
R
(7.26)
Je nach Art des Bauelements wird für einen induktiven Blindwiderstand XL = ω L und
entsprechend für einen kapazitiven XC = -1/ω C eingesetzt.
170
Wechselstrom-Abgleichbrücke
Die Funktionsweise einer Wechselstrom-Abgleichbrücke unterscheidet sich nur geringfügig von
der der Wheatstoneschen Messbrücke für Gleichgrößen.
U0
Z2
Z1
Ud
Z4
Z3
Abbildung 7.15: Wechselstrombrücke mit Scheinwiderständen
Ähnlich der in Kapitel 7.3.1 hergeleiteten Abgleichbedingung für ohmsche Widerstände gilt hier
für die Impedanzen
Z 2 Z 3 = Z1Z 4 .
(7.27)
Teilt man diese Scheinwiderstände nach Real- und Imaginärteil auf, folgt
(R2 +
jX 2 ) ⋅ (R3 + jX 3 ) = (R1 + jX 1 ) ⋅ (R4 + jX 4 ) .
(7.28)
Um diese Gleichung zu erfüllen, müssen auf jeder Seite Real- und Imaginärteil gleich groß sein.
Nach dem Ausmultiplizieren ergibt sich für den Realteil
R2 R3 − X 2 X 3 = R1R4 − X 1 X 4
(7.29)
X 2 R3 + X 3 R2 = X 1 R4 + X 4 R1 .
(7.30)
und den Imaginärteil
Die Bedingung für den Brückenabgleich kann ebenso in Polarform angegeben werden:
Z 2 Z 3 ⋅ e j (ϕ 2 +ϕ 3 ) = Z1 Z 4 ⋅ e j (ϕ 1 +ϕ 4 ) .
(7.31)
Es müssen in diesem Fall das Produkt der Beträge
Z 2 Z 3 = Z1 Z 4
(7.32)
171
und die Summe der Winkel gleich sein:
ϕ 2 + ϕ 3 = ϕ1 + ϕ 4
(7.33)
Beim Abgleich einer Wechselstrombrücke sind also zwei Bedingungen zu erfüllen. Die Brücke
benötigt mindestens zwei unabhängige Eingriffsmöglichkeiten, also zwei einstellbare Komponenten.
Kapazitätsmessbrücke nach Wien
Mit der Wienschen Kapazitätsmessbrücke können verlustbehaftete Kondensatoren vermessen werden. Bei der in Abbildung 7.16 gezeigten Brückenschaltung sind der Blindwiderstand der Kapazität
C2 und der Wirkwiderstand R2 die gesuchten Größen. Das Ersatzschaltbild für den verlustbehafteten Kondensator hätte ebenso durch eine Reihenschaltung dargestellt werden können.
Messobjekt
U0
C2
C1
Ud
R2
R1
R4
R3
Abbildung 7.16: Kapazitätsmessbrücke nach Wien
Mit
Z1 =
R1
jω C1 R1 + 1
Z2 =
;
R2
jω C 2 R2 + 1
folgt nach Gl. (7.27) für den Abgleich der Brücke
R2
R1
⋅ R3 =
⋅ R4 ,
jω C 2 R2 + 1
jω C1 R1 + 1
oder in übersichtlicherer Schreibweise
R2 R3 + jω C1 R1 R2 R3 = R1 R4 + jω C 2 R1 R2 R4 .
172
(7.34)
Aus der Gleichsetzung des Realteils ergibt sich
R2 =
R4
R1 .
R3
(7.35)
so dass mit R1 der Wert von R2 bestimmbar ist. Eine Änderung der Kapazität C1 bewirkt, wie aus
der Gleichsetzung des Imaginärteils ersichtlich,
C2 =
R3
C1
R4
(7.36)
eine Einstellung der Kapazität C2.
Für den Fall, dass eine Messbrücke aus zwei Widerstandsaufnehmern und zwei konstanten ohmschen Widerständen besteht, diese Brücke aber an eine Wechselspannung gelegt wird
(Trägerfrequenzmessbrücke), müssen bei den Widerstandsaufnehmern Erdungs- und
Leitungskapazitäten beachtet werden. Die Widerstandsaufnehmer besitzen hier eine Wirk- und eine
Blindkomponente und können wie in Abbildung 7.16 gezeigt, als Brücke dargestellt werden.
Daraus wird jetzt schon ersichtlich, dass die Trägerfrequenzmessbrücke auch bei ohmschen
Widerständen hinsichtlich der Wirk- und Blindkomponente abzugleichen ist.
Induktivitätsmessbrücke nach Maxwell
Zur Messung verlustbehafteter Induktivitäten kann die Induktivitätsmessbrücke nach Maxwell eingesetzt werden. In dem gewählten Beispiel sind die Blind- und Wirkkomponente durch eine Reihenschaltung verknüpft. L2 und R2 seien die gesuchten Größen und die bekannte Vergleichsinduktivität L1 ist nicht einstellbar.
U0
Messfühler
R2
L2
R4
L1
Ud
Abbildung 7.17: Induktivitätsmessbrücke nach Maxwell
173
R1
R3
Es soll gezeigt werden, dass die Brücke mit den beiden ohmschen Widerständen R1 und R3 abgeglichen werden kann. Nach der Abgleichbedingung für die Brücke gilt
(R2 + jω L2 ) ⋅ R3 = (R1 + jω L1 ) ⋅ R4
.
(7.37)
Daraus folgen für den Real- und Imaginärteil
R2 =
R4
R1
R3
;
L2 =
R4
L1 .
R3
(7.38)
Der Abgleich der Brücke ist, wie gefordert, durch die Einstellung der Widerstände R1 und R3 erfüllbar.
Wechselstrom-Ausschlagbrücke
Die Impedanzänderungen der induktiven oder kapazitiven Aufnehmer werden oft in Ausschlagbrücken gemessen. Dabei werden die Wirkwiderstände der Aufnehmer als konstant angesehen und
vernachlässigt, so dass nur die Blindwiderstände zu untersuchen sind.
U0
jX2
R0
jX1
Ud
R0
Abbildung 7.18: Wechselstrombrücke im Ausschlagverfahren
Gemäß Gl. (7.11) entsteht in der Brücke die Diagonalspannung
Ud =U0
j ( X 2 − X 1 ) ⋅ R0
U (X − X1 )
= 0⋅ 2
.
j ( X 2 + X 1 ) ⋅ 2 R0
2 X 2 + X1
(7.39)
Entsprechend gilt bei einer Viertelbrücke mit X1 = X0 und X2 = X0 + ∆X für die Diagonalspannung
Ud =
U ∆X
U0
∆X
⋅
≈ 0
2 2 X 0 + ∆X
4 X0
174
.
(7.40)
Die bereits vorgestellten Differentialaufnehmer werden vorzugsweise in Halbbrücken verschaltet.
Bei einem induktiven Differentialaufnehmer mit X1 = ω (L0 - ∆L) und X2 = ω (L0 + ∆L) ist nach
Gl. (7.39) die Diagonalspannung Ud linear proportional zur Induktivitätsänderung ∆L.
Ud =
U 0 ω ( L0 + ∆L − L0 + ∆L ) U 0 ∆L
⋅
=
.
2 ω (L0 + ∆L + L0 − ∆L )
2 L0
(7.41)
Bei kapazitiven Aufnehmern ergibt sich mit X1 = -1/ω C1 und X2 = -1/ω C2 für die Diagonalspannung der Brücke
1 1
1
−
+
C 2 C1 U 0 C1 − C 2
U ω
Ud = 0 ⋅
=
⋅
2 1 1
2 C1 + C 2
1
−
−
ω C 2 C1
.
(7.42)
Wird eine Halbbrücke aus Differentialkondensatoren aufgebaut und verändern die Kapazitäten wie
folgt ihren Wert:
C1 = C0 − ∆C
C 2 = C0 + ∆C ,
;
(7.43)
folgt für die Diagonalspannung dieser Anordnung
Ud =
U 0 C0 − ∆C − C0 − ∆C
U ∆C
⋅
=− 0
2 C0 − ∆C + C0 + ∆C
2 C0
.
(7.44)
Auch hier ist die Ud(∆C)-Kennlinie eine Gerade.
7.4 Trägerfrequenz-Brücke und -Verstärker
Die Brückendiagonalspannung Ud muss in vielen Anwendungsfällen zusätzlich verstärkt werden.
Bei Brückenschaltungen die mit Gleichspannung oder Gleichstrom versorgt werden, treten durch
die Offsetdrift des Messverstärkers und durch evtl. Thermospannungen, hervorgerufen durch unterschiedliche Materialien an den Anschlusspunkten, Schwierigkeiten bei dem Auflösungsvermögen
auf. Offset- und Thermospannungen sind Gleichgrößen, die von einem Wechselspannungsverstärker nicht übertragen werden. Eine störungsfreie Messung mit verbesserter Auflösung lässt sich erzielen, wenn die Brücke mit einer Wechselspannung U0(t) gespeist, und die Diagonalspannung
Ud(t) von einem Wechselspannungsverstärker übertragen wird.
175
TFG
U0(t)
R0+∆R
R0
u
Ud(t)
~
R0
R0
u
ua
a
S2
b
Wechselspannungsverstärker
Abbildung 7.19: Schaltbild einer Trägerfrequenzmessbrücke; TFG Trägerfrequenzgenerator
Die im Bild dargestellte Viertelbrücke enthält vier gleiche Widerstände R0, von denen einer im
Verlauf der Untersuchungen seinen Wert um ±∆R ändern wird. Die Brücke liegt an der Wechselspannung
U 0 (t ) = u 0 = uˆ0 sin ω 0 t .
(7.45)
Wird die Brücke um +∆R verstimmt, folgt für die Diagonalspannung
U d (t ) = u d =
uˆ 0 sin ω 0t ∆R
.
4
R0
(7.46)
Die Speisespannung lässt sich als Trägerspannung auffassen, die durch die Widerstandsänderung
∆R moduliert wird. Verkleinert sich der variable Widerstand auf R0 - ∆R, entsteht die Diagonalspannung
ud =
uˆ sin ω 0 t ∆R
uˆ 0 sin ω 0t (− ∆R )
=− 0
.
4
4
R0
R0
(7.47)
Das Minuszeichen im letzten Ausdruck bedeutet eine Phasenverschiebung von 180° zwischen der
Diagonalspannung und der Speisespannung. Immer dann wenn das Vorzeichen der Widerstandsverstimmung wechselt, springt die Phase der Diagonalspannung um π. Der Wechselspannungsverstärker vervielfacht diese Diagonalspannung. Seine Ausgangsspannung wird gleichgerichtet, um
die die Brücke verstimmende Widerstandsänderung zu erkennen. Zur Messung von positiven und
negativen Widerstandsänderungen werden gesteuerte Gleichrichter eingesetzt, die von einem TFGSignal gesteuert werden und die Phasenlage erkennen.
176
7.4.1 Beispiel zur Trägerfrequenzbrücke
Abbildung 7.20:Signalverläufe an einer Trägerfrequenzmessbrücke
177
In der Brücke wird während der Messungen ein Widerstand um den Faktor ±∆R geändert. Die
Brücke wird mit der Spannung
ut = uˆt sin ω 0t
(7.48)
versorgt (Abb. 7.21,Abschnitt I). Wird die Brücke um ∆R verstimmt (Abschnitt II), so entsteht die
Diagonalspannung
ud =
∆R
uˆt sin ω 0 t
4 R0
(Abschnitt III)
(7.49)
Die Speisespannung ut dient als sogenannte Trägerspannung, die durch die Widerstandsänderung
moduliert wird. Bei Abnahme des Widerstandes um -∆R (Abschnitt II) entsteht eine
Diagonalspannung von
ud = −
∆R
uˆt sin ω 0t (Abschnitt III)
4 R0
(7.50)
Das Minuszeichen entspricht einer Phasendifferenz von 180° zwischen der Trägerspannung ut und
der Diagonalspannung ud. Wenn sich das Vorzeichen der Brückenverstimmung ändert, springt die
Phase der Diagonalspannung um 180°. Eine Wechselspannungsverstärker verstärkt ud.
Mit Hilfe des gesteuerten Gleichrichters wird diese Wechselspannung gleichgerichtet, um die
Widerstandsänderung ermitteln zu können. Der gesteuerte Gleichrichter erlaubt nicht nur die Höhe
der Widerstandsänderung zu erkennen, sondern auch das Vorzeichen. Ein Doppelweggleichrichter
wäre für diese Anwendung ungeeignet, da hierbei das Vorzeichen der Widerstandsänderung nicht
ermittelt werden könnte. Der gesteuerte Gleichrichter wird ebenfalls mit der Trägerfrequenz
angesteuert, so dass der Schalter S2 zwischen a und b umschaltet (Abschnitt IV). Hieraus ergibt
sich die gleichgerichtete Ausgangsspannung ua (Abschnitt V). Die Einhüllende dieser
Ausgangsspannung lässt eindeutig die Höhe und das Vorzeichen der Widerstandsänderung
erkennen (Abschnitt V im Vergleich mit Abschnitt II).
Ist der Trägerspannung ut ein Offsetfehler überlagert (ut,0 Abschnitt VI), so ist dieser Fehler auch in
der Diagonalspannung ud,0 wiederzufinden (Abschnitt VII). Allerdings wird der fehlerhafte
Gleichanteil vom Wechselspannungsverstärker nicht verstärkt (Abschnitt VIII identisch mit
Abschnitt V). Dieser Fehler wird also nicht bis zum Ausgang übertragen, so dass Störungen durch
Gleichgrößen im Idealfall keinen Fehler im Messsignal erzeugen.
178
8 Anzeigegeräte
8.1 Kompensatoren
Die Kompensatoren verhindern die Rückwirkung eines Mess- oder Anzeigegerätes auf die zu messende Größe. Insbesondere die Ausschlagmessgeräte belasten die Strom- oder Spannungsquelle des
Messobjekts. Die Kompensatoren ermöglichen, Spannungen und Ströme leistungslos zu erfassen,
da die zur Messung benötigte Energie einer Hilfsquelle entnommen wird. Es wird eine Vergleichsgröße gebildet. Diese ist von der zu messenden Größe abzuziehen und die Differenz aus Mess- und
Vergleichsgröße wird von einem Nullinstrument angezeigt. Man verändert die Vergleichsgröße
solange, bis die Differenz ausreichend klein geworden ist. Das Nullinstrument sollte im Bereich des
Nullpunkts seine maximale Empfindlichkeit besitzen.
8.1.1 Einfache Kompensation mit Spannungsteiler
Die Wirkungsweise dieses Gleichspannungskompensators soll anhand von Abbildung 8.1 erklärt
werden.
IN
G
R0
RN
R
UR
Ux
Abbildung 8.1: Gleichspannungskompensation
Die zu messende Spannung Ux ist der Vergleichsspannung UR aus der Hilfsspannungsquelle UN
entgegengeschaltet.
U N = R0 ⋅ I N
UR =
;
UR = R ⋅ IN
R
UN
R0
(8.1)
Der Abgriff des Spannungsteilers wird solange verändert, bis das Galvanometer G den Wert Null
anzeigt. In diesem Fall wird dem Messobjekt keine Leistung entzogen und die zu messende Spannung Ux ist genauso groß wie die Vergleichsspannung UR.
179
Ux =UR =
R
UN
R0
(8.2)
Die Kompensationsspannung UN muss mit geringer Unsicherheit bekannt sein, daher sind hier
Normalspannungsquellen erforderlich. Das gleiche gilt für die Widerstände R und R0, was sich am
leichtesten durch Präzisionswiderstandsdekaden realisieren lässt.
8.1.2 Kompensationsschreiber
In der oben dargestellten Spannungskompensation wird der Abgleich noch manuell getätigt. Würde
das Null-Galvanometer durch einen Null-Verstärker ersetzt, kann mit dessen Ausgangssignal ein
Stellantrieb für den Potentiometerabgriff angesteuert werden. Bei positiven Spannungsdifferenzen
wird der abgegriffene Widerstand vergrößert und entsprechend bei negativen Spannungsdifferenzen verkleinert. Koppelt man den Stellantrieb für den Potentiometerabgriff mit einer Schreibfeder
können die Änderungen aufgezeichnet werden.
IN
UN
Ux - UR
Schreib- M
feder
Ux
R0
R
UR
Abbildung 8.2: Kompensationsschreiber
Zeitabhängige Vorgänge erfordern oft ein zeitabhängiges Aufzeichnen der Messgrößen. Die
Gründe hierfür sind eine nachträgliche Kontrolle, ein rechtzeitiges Erkennen von Extremwerten
und verschiedene Informationen über den Prozessablauf. Bestandteil dieser Messgeräte ist immer
eine Zeitbasis, die für eine konstante Relativgeschwindigkeit zwischen dem schreibenden Element
und dem Medium, auf das geschrieben wird, sorgt. Ausgangsgröße dieser Geräte ist dann der
Ausschlag des schreibenden Elementes.
Für langsame Zeitvorgänge bis zu maximal 100 Hz ist der Kompensationsschreiber einsetzbar.
Seine Vorteile liegen in der hohen Genauigkeit und der großen Empfindlichkeit. Aufgezeichnet
wird auf einer linearen Skala. Durch den Stellantrieb sind hohe Einstellkräfte verfügbar, so dass
Möglichkeiten zum Anschluss von Grenzwertschaltern u.a. gegeben sind.
Es treten die gleichen Einflussgrößen auf wie bei den Messverstärkern, nur kommt hier noch die
notwendige Konstanz der Kompensationsspannungsquelle hinzu.
180
8.1.3 Doppelte Kompensation
Die doppelte Kompensationsschaltung vermeidet eine Belastung der Normalspannungsquelle UN,
indem man die Schaltung durch eine zusätzliche Hilfsspannungsquelle Uh erweitert.
Rv
Ih
G
RN
U0
Uh
s
UN
Ux
Abbildung 8.3: Doppelte Kompensation
In den Schaltungen nach Abbildung 8.1 und Abbildung 8.2 wird zwar der unbekannten
Spannungsquelle Ux kein Strom entnommen, dagegen fließt ein dauernder Strom aus der
Normalspannungsquelle über den Kompensationswiderstand. Dies wird hier vermieden, da
zunächst ein beliebiger Hilfsstrom Ih eingestellt wird, der den Spannungsabfall des Normalelements
am Widerstand RN kompensiert.
U N = RN ⋅ I h
(8.3)
Im abgeglichenen Zustand wird am Spannungsteiler R der Widerstandswert RN abgegriffen, d.h.
keine Belastung der Normalspannungsquelle UN. Der zweite Schritt besteht darin, die zu messende
Spannung Ux über den Schalter S in den Messkreis zu schalten und bei unverändertem Hilfsstrom Ih
zu kompensieren. Dann gilt:
U x = RN′ ⋅ I h
(8.4)
und
Ux = UN ⋅
RN′
RN
(8.5)
Die Größe des Hilfsstromes kommt also im Messergebnis nicht vor. Wesentliches Kennzeichen der
doppelten Kompensation ist, dass weder der Normalspannungsquelle UN noch der unbekannten
Spannungsquelle Ux im abgeglichenen Zustand Strom entnommen wird. Dieses Verfahren dient der
Bestimmung von Leerlaufspannungen.
181
8.1.4 Lindeck-Rothe-Kompensator
Diese Kompensationsschaltung verzichtet auf ein Spannungsnormal und stellt den Kompensationsstrom mit einen Präzisionsstrommesser ein, wodurch sie schaltungstechnisch besonders einfach
wird.
Rv
Ih
UN
A
U0
G
R0
Ux
Abbildung 8.4: Lindeck-Rothe-Kompensator
Die Hilfsspannungsquelle UN liefert den Kompensationsstrom Ih, der den festen Kompensationswiderstand R0 und den Vorwiderstand Rv durchfließt. Die unbekannte Spannung Ux wird mit dem
Spannungsabfall U0 am Kompensationswiderstand verglichen. Der Vorwiderstand wird solange
verändert, bis das Galvanometer Null anzeigt und es gilt:
U x = U 0 = R0 ⋅ I h
(8.6)
Der sich dabei einstellende Strom Ih wird an dem Strommesser A abgelesen, er ist proportional der
unbekannten Spannung. Die Unsicherheit des Lindeck-Rothe-Kompensators wird durch die
Unsicherheit des Strommessinstrumentes A bestimmt.
8.1.5 Gleichstromkompensation
Mit dem Spannungskompensator konnten Spannungen gemessen werden, ohne dass ein Strom über
das Nullinstrument floss. Mit dem Stromkompensator gelingt die Strommessung, ohne dass eine
Spannung an den Messklemmen abfällt. Die Wirkungsweise wird anhand der sogenannten Saugschaltung im folgenden Bild erklärt.
182
Rv
Ih
R1
A
1
Ix
Ih-Ix
Uh
R0
∆U
G
Ix
2
Abbildung 8.5: Saugschaltung zur Stromkompensation
An den Messklemmen 1 und 2 fällt genau dann keine Spannung mehr ab, wenn ∆U = 0 ist. In diesem Fall gilt:
R1 ⋅ I x = R0 ⋅ ( I h − I x )
(8.7)
Über den Widerstand Rv kann der Hilfsstrom Ih so eingestellt werden, dass die obige Gleichung erfüllt wird. Das Galvanometer G zeigt beim Nullabgleich an, dass die Spannung ∆U verschwunden
ist. Für die Ströme in der Schaltung folgt:
Ix =
R0
⋅ Ih
R0 + R1
R
I h = 1 + 1 ⋅ I x
R0
;
(8.8)
8.2 Elektrische Messwerke
Dieser Abschnitt befasst sich mit der Wirkungsweise der verschiedenen Messwerke. Dabei wird
auch auf Details eingegangen, die für eine sachgemäße Anwendung wichtig sind. Die hier im einzelnen vorgestellten Messwerke nutzen die zwischen zwei magnetischen Feldern wirkende Kraft
zur Messung von Strömen aus. Die magnetischen Felder können sowohl von stromdurchflossenen
Leitern, als auch durch ferromagnetische Werkstoffe hervorgerufen werden. Durch Kombination
dieser Möglichkeiten entstehen Messwerke mit speziellen Vor- und Nachteilen, die von ihrer Wirkungsweise her Strommessgeräte sind.
8.2.1 Drehspulmesswerk
Das Drehspulinstrument enthält eine bewegliche Spule, die in dem radialhomogenen Feld eines
Dauermagneten aufgehängt ist. Auf einen vom Strom I durchflossenen Leiter der Länge l, der senkrecht in einem Magnetfeld der Induktion B steht, wirkt die sogenannte Lorentzkraft F:
183
F = I ⋅ B ⋅l
(8.9)
F
Abbildung 8.6: Wirkung der Lorentzkraft
Diese Kraft steht immer senkrecht auf der durch Stromrichtung und Feldrichtung bestimmten
Ebene. Da das Magnetfeld des in Bild 8.7 skizzierten Drehspulmesswerkes Radialsymmetrie
besitzt, ist die Induktion B im Luftspalt unabhängig vom Winkel α. Die Kraft F tritt an beiden
Seiten der Spule auf und ist proportional der Windungszahl w. Damit ist das elektrische Moment:
M el = 2 ⋅ w ⋅
d
⋅l ⋅ I ⋅ B = w⋅d ⋅l ⋅ I ⋅ B .
2
(8.10)
Damit dieses Moment nicht wie beim Gleichstrommotor zu einer dauernden Umdrehung der Spule
führt, ist diese durch eine Feder gefesselt. Das mechanische Moment, durch die Feder mit der
Federkonstanten D verursacht, ist direkt proportional zum Ausschlagwinkel α.
M me = D ⋅α
(8.11)
Fließt kein Strom, so wird die Spule über die Feder in der Nullstellung α = 0° gehalten. Beim
Stromdurchgang wird dann die Spule soweit abgelenkt, bis das elektrische und mechanische
Moment im Gleichgewicht sind.
M me = M el
(8.12)
Das führt zur Kennlinie
α=
w⋅ d ⋅l
⋅B⋅I .
D
(8.13)
Der Zeigerausschlag nimmt also linear mit dem Strom zu. Die Empfindlichkeit
184
E=
dα w ⋅ d ⋅ l ⋅ B
=
dI
D
(8.14)
ist daher konstant.
Abbildung 8.7: Drehspulmesswerk
Im Abbildung 8.7 sind die Drehmomente über den Ausschlagwinkel aufgetragen. Man kann jedem
Ausschlagwinkel α einen Strom I zuordnen. Mit dem Drehspulinstrument lassen sich Ströme von
10-9 A messen. Dabei wird in der Spule nur eine geringe Leistung umgesetzt. Drehspulinstrumente
mit Permanentmagneten zeichnen sich durch ihren geringen Eigenverbrauch aus, da das magnetische Feld nicht von der Messgröße erzeugt wird.
185
Eigenschaften des Drehspulmesswerkes:
Das Drehspulinstrument ist ein Strommesser. Es wird aber auch zur Spannungsmessung benutzt,
indem der über das Messinstrument fließende Strom mit dessen Innenwiderstand multipliziert und
das Ergebnis als Spannung direkt angezeigt wird.
In dem Messwerk sind Bauteile wie Spule, Dauermagnet und Feder eingesetzt, deren Eigenschaften
sich mit der Temperatur ändern. Die Einflüsse auf die Federkonstante und auf die Induktion des
Permanentmagneten sind so gering, dass sie vernachlässigt werden können. Bedeutsamer ist dagegen die Zunahme des elektrischen Widerstandes der Kupferspule von R0 auf RT bei einer Temperaturerhöhung von T0 auf T. Diese Widerstandsänderung führt beim Einsatz als Spannungsmesser
zu einer fehlerhaften Anzeige, da eine Zunahme des Widerstandes eine Abnahme des Spulenstromes und entsprechend einen verminderten Ausschlag bewirkt.
Fehlerhafte Anzeigen können auch auftreten, wenn die Geräte nicht in ihrer vorgeschriebenen Gebrauchslage benutzt werden. Lageabhängige Reibung oder Kippfehler werden vermieden, indem
die Messwerke nach den Sinnbildern auf der Skala aufgestellt werden.
⊥
=ˆ
senkrechte Nennlage
;
=ˆ
waagerechte Nennlage
∠60° =ˆ
schräge Nennlage
8.2.2 Kernmagnetmesswerk
Beim Kernmagnetmesswerk ist der Dauermagnet im Inneren der Drehspule als zylindrischer
Körper angeordnet. Nach außen wird der Luftspalt von einem rohrförmigen Eisenmantel mit
weichmagnetischen Eigenschaften umschlossen. Während die Drehspulmesswerke mit
Außenmagnet im zylindrischen Luftspalt eine konstante magnetische Induktion aufweisen, liegt im
Kernmagnetinstrument ein radiales Magnetfeld mit sinusförmiger Amplitude vor. Für die radiale
Komponente der Induktion im Luftspalt Br(γ) gilt:
Br (γ ) = Bmax ⋅ cos γ
.
(8.15)
Hier ist γ = 0° der Winkel, bei dem Br am größten ist. Bezeichnet man den Winkel zwischen der
Magnetisierungsrichtung des Dauermagneten (γ = 0°) und der Ruhelage des Spulenrähmchens
(Strom durch die Drehspule I = 0 und Ausschlagwinkel α = 0° mit β und setzt diese in Gl. (8.15)
ein, so ergibt sich:
Br (α ) = Bmax ⋅ cos(α − β ) .
186
(8.16)
Damit ist das elektrisch erzeugte Drehmoment
M el = w ⋅ d ⋅ l ⋅ I ⋅ Bmax ⋅ cos(α − β ) .
(8.17)
Aus dem Momentengleichgewicht Mel = Mme folgt für den Skalenverlauf
I=
D ⋅α
.
w ⋅ d ⋅ l ⋅ Bmax ⋅ cos(α − β )
(8.18)
Die Kennlinie ist nichtlinear. Durch Wahl des Winkels β können unterschiedliche Formen der
Kennlinie erzeugt werden.
Abbildung 8.8: Kernmagnetmesswerk
187
8.2.3 Elektrodynamisches Messwerk
Das Prinzip des elektrodynamischen Messwerkes ist gleich dem des Drehspulinstrumentes. Der
wesentliche Unterschied im Aufbau ist ein Elektromagnet, der den Dauermagnet des
Drehspulmesswerks ersetzt. (Messung von Leistung)
N
IF
ω1
S
Abbildung 8.9: Elektrodynamisches Messwerk
Ist der magnetische Widerstand des Eisenkreises zu vernachlässigen, und fließt der Strom IF durch
die Feldspule mit w1 Windungen, so ist die magnetische Induktion B in dem Luftspalt der Breite a
B=
µ0 ⋅ w1
a
⋅ IF
.
(8.19)
Von diesem Feld wird auf die bewegliche, von dem Strom ISp durchflossene Spule mit w2 Windungen und den Abmessungen d , l eine Kraft ausgeübt, woraus das elektrische Moment
M el =
µ0 ⋅ w1 ⋅ w2 ⋅ d ⋅ l
a
⋅ I F ⋅ I Sp
(8.20)
resultiert.
Das Rückstellmoment Mme = D⋅α wird wie bei dem Drehspulinstrument durch eine Feder erzeugt.
Bei Gleichheit der Momente ist der Ausschlagwinkel α
α=
µ0 ⋅ w1 ⋅ w2 ⋅ d ⋅ l
a⋅D
⋅ I F ⋅ I Sp = k ⋅ I F ⋅ I Sp
(8.21)
wenn in dem Proportionalitätsfaktor k alle bekannten Größen zusammengefasst werden.
Das elektrodynamische Messwerk ist ein multiplizierendes Instrument und zeigt das Produkt
zweier Ströme an. Es wird daher häufig zur Leistungsmessung eingesetzt. Das Produkt aus
Spannung U und Strom I an einem Verbraucher wird gemessen, indem der Verbraucherstrom I
188
über die Feldspule (Strompfad) fließt und der Spulenstrom ISp (Spannungspfad) immer proportional
der anliegenden Spannung ist.
IF
I
ISp
U
Rv
Verbraucher
Abbildung 8.10: Leistungsmessung
Der Strom durch die Drehspule ist:
I Sp =
Rsp
Rv
=ˆ
=ˆ
U
RSp + Rv
(8.22)
Widerstand der Drehspule
Vorwiderstand
Der Spulenstrom ISp ist sehr viel kleiner als IF, so dass IF ≈ I gilt und das Messwerk näherungsweise
die Leistung am Verbraucher anzeigt.
α=
µ 0 ⋅ w1 ⋅ w2 ⋅ d ⋅ l
a ⋅ D ⋅ (RSp + Rv )
⋅ I F ⋅U =
k ⋅ I F ⋅U
RSp + Rv
(8.23)
Dies gilt auch für Wechselgrößen. Das Messwerk zeigt aufgrund seiner Trägheit den linearen, zeitlichen Mittelwert des Produktes von Spannung und Strom an.
189