theoretische informatik - Technische Universität Braunschweig
Werbung

THEORETISCHE INFORMATIK
Vorlesungsskript
Jiřı́ Adámek
Institut für Theoretische Informatik
Technische Universität Braunschweig
April 2006
Inhaltsverzeichnis
1 Endliche Automaten
1
1.1 Mathematische Grundbegriffe . . . . . . . . . . . . . . . . . . . . . .
2
1.2 Definition der endlichen Automaten . . . . . . . . . . . . . . . . . .
6
1.3 Nichtdeterministische Automaten . . . . . . . . . . . . . . . . . . . .
10
1.4 Reguläre Sprachen . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
1.5 Minimierung von Automaten . . . . . . . . . . . . . . . . . . . . . .
21
1.6 Nerode-Äquivalenz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
1.7 Beweise der Regularität . . . . . . . . . . . . . . . . . . . . . . . . .
27
1.8 Moore- und Mealy-Automaten . . . . . . . . . . . . . . . . . . . . .
30
2 Kontextfreie Sprachen und Kellerautomaten
33
2.1 Die Idee einer formalen Grammatik . . . . . . . . . . . . . . . . . . .
33
2.2 Kontextfreie Grammatik . . . . . . . . . . . . . . . . . . . . . . . . .
34
2.3 Ableitungsbäume . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
2.4 Kontextfreie und reguläre Sprachen . . . . . . . . . . . . . . . . . . .
43
2.5 Eigenschaften kontextfreier Sprachen . . . . . . . . . . . . . . . . . .
48
2.6 Nullierbare Variablen . . . . . . . . . . . . . . . . . . . . . . . . . . .
54
2.7 Chomsky-Normalform . . . . . . . . . . . . . . . . . . . . . . . . . .
56
2.8 Algorithmen für formale Sprachen . . . . . . . . . . . . . . . . . . .
61
2.9 Kellerautomaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
2.10 Kellerautomaten und kontextfreie Sprachen . . . . . . . . . . . . . .
68
3 Turingmaschinen
73
3.1 Definition einer Turingmaschine . . . . . . . . . . . . . . . . . . . . .
73
3.2 Modifikationen von Turingmaschinen . . . . . . . . . . . . . . . . . .
79
3.2.1
TM mit mehreren finalen Zuständen . . . . . . . . . . . . . .
79
3.2.2
TM mit zusätzlichem Gedächtnis . . . . . . . . . . . . . . . .
79
3.2.3
TM mit erweitertem Bandalphabet . . . . . . . . . . . . . . .
80
3.2.4
TM mit mehrspurigem Band . . . . . . . . . . . . . . . . . .
80
3.2.5
TM mit mehreren Bändern . . . . . . . . . . . . . . . . . . .
82
3.3 Entscheidbare Probleme und rekursive Sprachen . . . . . . . . . . .
85
i
ii
INHALTSVERZEICHNIS
3.4 Nichtdeterministische Turingmaschinen . . . . . . . . . . . . . . . . .
90
3.5 Berechenbare Funktionen . . . . . . . . . . . . . . . . . . . . . . . .
93
4 Churchsche These
97
4.1 RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
97
4.2 RAM-Berechenbarkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.3 Grammatiken und Turingmaschinen . . . . . . . . . . . . . . . . . . 103
4.4 Chomsky-Hierarchie . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.5 Rekursive Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . 110
5 Unentscheidbare Probleme
117
5.1 Universelle Turingmaschine . . . . . . . . . . . . . . . . . . . . . . . 117
5.2 Das Halteproblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.3 Weitere unentscheidbare Probleme . . . . . . . . . . . . . . . . . . . 124
5.3.1
Das Akzeptanzproblem . . . . . . . . . . . . . . . . . . . . . 124
5.3.2
Akzeptanz des leeren Wortes . . . . . . . . . . . . . . . . . . 125
5.3.3
Ist eine TM ein Algorithmus? . . . . . . . . . . . . . . . . . . 126
5.3.4
Satz von Rice . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
5.3.5
Minimierung von Turingmaschinen . . . . . . . . . . . . . . . 129
6 Komplexität von Algorithmen
131
6.1 Beispiele effizienter Algorithmen . . . . . . . . . . . . . . . . . . . . 132
6.2 Komplexitätsklasse P
. . . . . . . . . . . . . . . . . . . . . . . . . . 138
6.3 Berechnungsprobleme und Reduzierbarkeit . . . . . . . . . . . . . . . 142
6.4 Robustheit der Klasse P . . . . . . . . . . . . . . . . . . . . . . . . . 147
6.4.1
TM mit zusätzlichem Gedächtnis . . . . . . . . . . . . . . . . 148
6.4.2
TM mit mehrspurigem Band . . . . . . . . . . . . . . . . . . 148
6.4.3
Mehr-Band TM . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.4.4
RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.5 Geometrische Algorithmen und reelle RAM . . . . . . . . . . . . . . 150
6.6 Komplexitätsklasse N P . . . . . . . . . . . . . . . . . . . . . . . . . 161
6.7 N P-Vollständigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
6.8 Weitere N P-vollständige Probleme . . . . . . . . . . . . . . . . . . . 168
6.9 Komplexitätsklasse coN P . . . . . . . . . . . . . . . . . . . . . . . . 172
6.10 Komplexität von Optimierungsproblemen . . . . . . . . . . . . . . . 174
6.11 Approximation von Optimierungsproblemen . . . . . . . . . . . . . . 180
6.12 Raumkomplexität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
7 Parallele Algorithmen
7.1 Algorithmen für eine PRAM
191
. . . . . . . . . . . . . . . . . . . . . . 191
7.2 Simulationen von PRAM Modellen . . . . . . . . . . . . . . . . . . . 198
INHALTSVERZEICHNIS
iii
7.3 Komplexitätsklasse N C . . . . . . . . . . . . . . . . . . . . . . . . . 199
7.4 Boolesche Schaltkreise und PRAMs . . . . . . . . . . . . . . . . . . . 202
7.5 Netzwerk-Modelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
7.5.1
Ring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
7.5.2
Zweidimensionales Gitter . . . . . . . . . . . . . . . . . . . . 213
7.5.3
Hypercube . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
iv
INHALTSVERZEICHNIS
Kapitel 3
Turingmaschinen
Weder endliche Automaten noch Kellerautomaten sind genügend starke Berechnungsmodelle, denn sie sind nicht fähig, selbst so einfache Sprachen wie z. B.
{an bn cn ; n ≥ 1} zu akzeptieren. Wir führen jetzt ein Modell einer Maschine ein,
die eine sehr starke Leistung hat, obwohl die Definition nicht komplizierter als die
der Kellerautomaten ist: die Turingmaschinen. Diese Maschinen wurden von Alan
Turing in den dreißiger Jahren als Formalisierung des intuitiven Begriffs des Algorithmus eingeführt. Turing versuchte zu zeigen, dass jeder Rechenprozess, den ein
Mensch aufgrund einer (endlichen, eindeutigen) Anweisung durchführen kann, auch
automatisch von einer Maschine durchgeführt werden kann. Was einem menschlichen Rechner zur Verfügung steht, ist eine endliche Liste von Instruktionen, die
zusammen mit den Daten in seinem Gedächtnis eine endliche Menge von (inneren)
Zuständen formt. Außerdem hat er einen unbeschränkten Raum, in dem er lesen,
schreiben und überschreiben darf. Das kann (zweidimensional) durch einen beliebig erweiterbaren Papierstoß realisiert werden, oder äquivalent, falls alle Zeilen als
Erweiterungen der ersten angesehen werden, als ein (eindimensionales) unendliches
Band. Das formale Modell ist dann dem eines Kellerautomaten ähnlich: anstelle des
Kellers gibt es hier ein Band, auf dem sich ein read-and-write-Kopf unbeschränkt
bewegt.
Die Leistungsfähigkeit von Turingmaschinen ist trotzdem unvergleichlich größer als
die der Kellerautomaten. Es zeigt sich, dass die Klasse aller Probleme, die mit Turingmaschinen gelöst werden können, dieselbe ist wie die Klasse aller Probleme, die
moderne Rechner mit modernen Programmiersprachen lösen können. Die Churchsche These, die wir später genauer erläutern, behauptet, dass die Turingmaschine
sogar ein ganz allgemeines Modell des Begriffs des Algorithmus ist. Also kann ein
Problem genau dann mit einem Algorithmus gelöst werden, wenn eine Turingmaschine es lösen kann. Diese These kann nicht bewiesen werden (der Begriff des Algorithmus ist eben doch nur intuitiv), aber sie wurde mehrmals überzeugend dadurch
untermauert, dass andere – oft grundsätzlich verschiedene – Berechnungsmodelle
dieselbe Klasse lösbarer Probleme ergeben.
3.1
Definition einer Turingmaschine
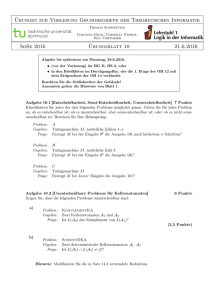
Eine Turingmaschine besteht – analog zum Kellerautomaten – aus inneren Zuständen, externem Speicher und einer Betriebseinheit, die aufgrund des momentanen
Zustandes und des gerade gelesenen Symbols entscheidet, welcher der nächste Zustand ist und wie der Speicher geändert wird. Im Vergleich zu Kellerautomaten
73
74
KAPITEL 3. TURINGMASCHINEN
hat hier der Speicher den Typ eines (unbeschränkten) Bandes, auf dem sich ein
Lese-/Schreibkopf frei bewegt:
...
a b b a
...
⇑
Band
ww Kopf
ww
w
w
ww
ww
w
{w
w
Betriebseinheit
• q0
q3 •
•
• q1
• q2
(Obwohl das Band unbeschränkt ist, ist zu jedem Zeitpunkt nur ein endlicher Teil
beschrieben; der Rest ist leer.) Noch ein Unterschied im Vergleich zu den Kellerautomaten: wir arbeiten zuerst nur mit deterministischen Turingmaschinen, denn sie
sind (wie im Fall der endlichen Automaten) genauso leistungsfähig wie die nichtdeterministischen. Das beweisen wir später. Die Übergangsfunktion δ einer Turingmaschine entscheidet aufgrund des momentanen Zustandes q und des gerade gelesenen
Bandsymbols s, ob
1. sich der Zustand zu q 0 ändert und sich der Kopf nach links (L) oder rechts
(R) bewegt oder
2. sich der Zustand zu q 0 ändert und der Kopf das momentane Bandsymbol mit
einem neuen Symbol s0 überschreibt.
Das beschreiben wir als Funktion
δ(q, s) = (q 0 , s0 ),
wobei s0 = L, R oder s0 ∈ Σ ist.
(Σ ist das gegebene Eingabealphabet). Wir müssen aber auch Bandfelder, die nicht
beschriftet sind, behandeln. Dazu führen wir ein Spezialsymbol
#
(Blank)
ein, das unbeschriftete Felder bezeichnet. In der Formel δ(q, s) = (q 0 , s0 ) sind q und
q 0 also Zustände, s ein Symbol aus Σ ∪ {#} und s0 ein Symbol aus Σ ∪ {#,L,R}.
Obwohl die Turingmaschine, wie wir sie jetzt definieren, deterministisch ist, gibt es
neben 1. und 2. noch eine weitere Möglichkeit für ihr Verhalten, nämlich dass
3. die Maschine im Zustand q auf dem Bandsymbol s hält und die Berechnung
endet.
Formal wird dies dadurch beschrieben, dass δ(q, s) nicht definiert ist.
Hier ist δ also eine partielle Funktion. Es gibt einen wichtigen Grund für diesen
dritten Fall: der Kopf der Turingmaschine ist kein read-only-Kopf (wie im Fall
der endlichen Automaten und Kellerautomaten). Der Impuls, eine Berechnung zu
beenden, erfolgt hier also nicht durch das Ende der Eingabe.
Im Vergleich mit den DEA oder Kellerautomaten ergibt sich eine kleine Vereinfachung: es genügt ein finaler Zustand, wir brauchen keine Menge F ⊆ Q (vergleiche
3.2 unten).
Definition. Eine Turingmaschine (TM) ist ein Fünftupel
M = (Q, Σ, δ, q0 , qF )
wobei
3.1. DEFINITION EINER TURINGMASCHINE
Q
Σ
δ
q0 ∈ Q
qF ∈ Q
75
eine endliche Menge (aller Zustände),
eine endliche Menge (das Eingabealphabet), die die Symbole L, R und
# nicht enthält,
eine partielle Funktion (die Übergangsfunktion) mit Definitionsbereich
Q × (Σ ∪ {#}) und Wertebereich Q × (Σ ∪ {#,L,R}),
der Initialzustand und
der Finalzustand ist.
Notation. Wir schreiben statt δ(q, s) = (q 0 , s0 ) oft nur
(q, s) → (q 0 , s0 )
und sprechen von Übergangsregeln. Wir bezeichnen durch Σ die Menge Σ =
Σ ∪ {#}.
Beispiel 1. Teilbarkeit durch 5. Der Algorithmus, der für eine Zahl entscheidet, ob
sie durch 5 teilbar ist, ist einfach: akzeptiert werden Zahlen mit der letzten Ziffer 0
oder 5. Wir lesen also die Eingabe s1 . . . sn bis wir das letzte beschriebene Feld sn
erreichen (also: bis # erscheint und dann einen Schritt zurück). Falls sn = 0 oder
5, gehen wir in den Finalzustand qF über:
(q0 , i) → (q0 , R)
für i = 0, 1, . . . , 9 (wir lesen weiter)
(q0 , #) → (q1 , L) einen Schritt zurück und in den neuen Zustand q1
(q1 , 0) → (qF , 0)
falls sn = 0 oder 5, ist der letzte Zustand qF
(q1 , 5) → (qF , 5)
Genauer: die folgende TM
M = ({q0 , q1 , qF }, {0, 1, . . . , 9}, δ, q0 , qF ),
deren Übergangsregeln oben aufgelistet sind, akzeptiert die Sprache aller Wörter
über Σ = {0, 1, . . . , 9}, die mit 0 oder 5 enden. Beispiel einer Berechnung: für die
Eingabe 132 wird die TM die folgenden Schritte machen:
... # # 1 3 2 # # # #
...
Initialkonfiguration
⇑
q0
... # # 1 3 2 # # # #
...
⇑
q0
... # # 1 3 2 # # # #
...
⇑
q0
... # # 1 3 2 # # # #
...
⇑
q0
... # # 1 3 2 # # # #
...
Haltekonfiguration
⇑
q1
Da kein Übergang (q1 , 2) → definiert ist, hält hier die Turingmaschine. Die Eingabe
132 wird nicht akzeptiert, da q1 nicht der Finalzustand ist.
76
KAPITEL 3. TURINGMASCHINEN
Die Berechnung von Eingaben formalisieren wir jetzt.
Konfigurationen: Eine Konfiguration einer Turingmaschine ist die vollständige
Information über die TM zu einem Zeitpunkt der Berechnung; sie wird durch (1)
den momentanen Zustand q, (2) den Inhalt des Bandes und (3) die Position des
Kopfes bestimmt. Also ist (1) ein Element der Menge Q. Wir können (2) und (3)
zusammenfassen, indem wir sagen, welches Wort u links vom Kopf steht, welches
Wort v rechts steht und welches Symbol a aus Σ = Σ ∪ {#} der Kopf liest. Dabei
ist u entweder leer, oder hat das erste Symbol aus Σ und die weiteren aus Σ:
∗
u ∈ Σ × Σ ∪ {ε}.
∗
Analog v ∈ Σ × Σ ∪ {ε}. Eine Konfiguration ist also ein Quadrupel
∗
∗
(q, u, a, v), wobei q ∈ Q, u ∈ Σ × Σ ∪ {ε}, a ∈ Σ und v ∈ Σ × Σ ∪ {ε}.
Die Menge
∗
∗
K = Q × (Σ × Σ ∪ {ε}) × Σ × (Σ × Σ ∪ {ε})
heißt Konfigurationsmenge.
Die üblichere (und übersichtlichere) Schreibweise ist, u, a, v zu konkatenieren und a
zu unterstreichen:
(q, uav).
In Beispiel 1 in Abschnitt 3.1 hat die Berechnung also die Konfigurationen
(q0 , 132)
(q0 , 132)
(q0 , 132)
(q0 , 132#) und
(q1 , 132)
Berechnung: Die Eingabe
s1 s2 . . . sn ∈ Σ ∗
wird immer so auf das Band geschrieben, dass die Buchstaben ohne Leerzeichen
hintereinander stehen. Der Kopf wird auf den ersten Buchstaben gestellt und der
Zustand ist initial. Mit anderen Worten heißt das: wir erwarten am Anfang, dass
die Konfiguration die folgende Form hat:
(∗) (q0 , s1 s2 . . . sn ),
wobei s1 . . . sn ∈ Σ∗ .
Der Fall der leeren Eingabe ε ∈ Σ∗ (also n = 0) entspricht der Konfiguration
(q0 , #).
Konfigurationen der Form (∗) heißen Initialkonfigurationen.
Falls die Turingmaschine eine Konfiguration
(q, s1 s2 . . . si−1 si si+1 . . . sn )
erreicht hat, gibt es zwei Möglichkeiten: entweder ist δ(q, si ) nicht definiert, dann
heißt die Konfiguration Haltekonfiguration, oder es gilt
δ(q, si ) = (q 0 , s0 ) mit s0 ∈ {L,R} ∪ Σ,
dann definieren wir die Folgekonfiguration wie folgt:
1. falls s0 =L, dann ist die Folgekonfiguration
(q 0 , s1 s2 . . . si−1 si si+1 . . . sn )
2. falls s0 =R, dann ist die Folgekonfiguration
(q 0 , s1 s2 . . . si−1 si si+1 . . . sn )
3. falls s0 ∈ Σ, dann ist die Folgekonfiguration
(q 0 , s1 s2 . . . si−1 s0 si+1 . . . sn ).
Diese Definition ist in Tabelle 3.1 zusammengefasst.
3.1. DEFINITION EINER TURINGMASCHINE
Konfiguration
(q, s1 s2 . . . si−1 si si+1 . . . sn )
(q, s1 s2 . . . si−1 si si+1 . . . sn )
(q, s1 s2 . . . si−1 si si+1 . . . sn )
(q, s1 s2 . . . si−1 si si+1 . . . sn )
δ(q, si )
(q 0 , L)
(q 0 , R)
(q 0 , s0 )
nicht definiert
77
Folgekonfiguration
(q , s1 s2 . . . si−1 si si+1 . . . sn )
(q 0 , s1 s2 . . . si−1 si si+1 . . . sn )
(q 0 , s1 s2 . . . si−1 s0 si+1 . . . sn )
keine (Haltekonfiguration)
0
Tabelle 3.1: Definition der Folgekonfiguration der TM
Bemerkung 1. Wie ist der Fall 1 zu verstehen, falls i = 1 gilt? Die Folgekonfiguration zu (q0 , s1 . . . sn ) ist natürlich (q 0 , #s1 . . . sn ). Analog folgt im Fall 2 aus i = n,
dass die Folgekonfiguration (q 0 , s1 . . . sn #) ist.
Notation. Die Relation Folgekonfiguration“ auf der Menge K aller Konfiguratio”
nen bezeichnen wir mit dem Symbol `. Also ergibt der 1. Fall
(q, s1 s2 . . . si−1 si si+1 . . . sn ) ` (q 0 , s1 s2 . . . si−1 si si+1 . . . sn )
usw. Die reflexive und transitive Hülle dieser Relation wird mit `∗ bezeichnet; d.h.,
K `∗ K 0 bedeutet, dass K und K 0 zwei Konfigurationen sind, die entweder gleich
sind oder dass es Konfigurationen
K = K 0 , K1 , . . . , K n = K 0
mit Ki−1 ` Ki für i = 1, . . . , n gibt. Wir sagen, dass die Konfiguration K 0 von K
berechenbar ist.
In Beispiel 1 in Abschnitt 3.1 gilt
(q0 , 132) ` (q0 , 132) ` . . . ` (q1 , 132)
und, die letzte Konfiguration hat keine Folgekonfiguration, da sie eine Haltekonfiguration ist.
Definition. Für jede Turingmaschine ist die Berechnung einer Eingabe s1 s2 . . . sn
∈ Σ∗ eine endliche oder unendliche Liste von Konfigurationen:
K0 ` K1 ` K2 ` . . .
wobei
1. K0 die Initialkonfiguration mit K0 = (q0 , s1 s2 . . . sn ) ist, und
2. falls die Liste endlich ist, ist die letzte Konfiguration eine Haltekonfiguration.
Wir sagen, dass die Turingmaschine die Eingabe genau dann akzeptiert, wenn ihre
Berechnung endlich ist und der Zustand der letzten Konfiguration final ist.
Bemerkung 2. Die Berechnung einer Eingabe w hat also drei mögliche Ergebnisse:
1. die TM hält und akzeptiert w,
2. die TM hält und akzeptiert w nicht,
3. die TM hält nicht (und akzeptiert w deshalb nicht).
Am Anfang ist die Eingabe kompakt“, also ohne Unterbrechung (durch #) auf dem
”
Band geschrieben. Im Verlauf der Berechnung kann # an jeder Stelle erscheinen.
Beispiel 2. In Beispiel 1 in Abschnitt 3.1 haben wir die Berechnung der Eingabe
132 beschrieben. Die letzte Konfiguration ist (q1 , 132). Da q1 nicht final ist, wird
132 nicht akzeptiert.
Auch das leere Wort wird nicht akzeptiert: hier haben wir eine 1-Schritt-Berechnung,
denn (q0 , #) ist eine Haltekonfiguration, und q0 ist nicht final.
78
KAPITEL 3. TURINGMASCHINEN
Diese Turingmaschine hält auf jede Eingabe (eine wichtige Eigenschaft, wie wir
später erfahren werden) und akzeptiert genau die Eingaben, deren letztes Symbol
0 oder 5 ist.
Definition. Für jede Turingmaschine M = (Q, Σ, δ, q0 , F ) bezeichnen wir mit
L(M )
die Sprache aller Wörter über Σ, die M akzeptiert.
Beispiel 3. Eine Turingmaschine, die die Sprache aller Wörter
[an bn cn ]
für n ≥ 1
über Σ = {a, b, c, [, ]} akzeptiert. (Diese Sprache ist nicht kontextfrei – beweisen sie
es!)
Wir simulieren den folgenden primitiven Algorithmus:
(i) lösche ein a und gehe nach rechts, solange ein a gelesen wird,
(ii) lösche ein b und gehe nach rechts, solange ein b gelesen wird,
(iii) lösche ein c und gehe nach links; am Ende:
(iv) akzeptiere genau dann, wenn alle Felder zwischen [ und ] leer sind.
Schritt (i) wird wie folgt implementiert:
1. (q0 , [ ) → (q1 ,R)
2. (q1 , a) → (q2 , #)
3. (q2 , #) → (q2 ,R)
4. (q2 , a) → (q2 ,R)
Schritt (ii) analog:
5. (q2 , b) → (q3 , #)
6. (q3 , #) → (q3 ,R)
7. (q3 , b) → (q3 ,R)
und Schritt (iii) wie folgt:
8. (q3 , c) → (q4 , #)
9. (q4 , x) → (q4 ,L)
für x = #, a, b
10. (q4 , [ ) → (q1 ,R)
11. (q1 , #) → (q1 ,R)
Schritt (iv) entspricht der Situation, in der im Zustand q1 am Ende das Symbol ]
gelesen wird:
12. (q1 , ] ) → (qF , ] )
Das heißt, dass die folgende TM:
M = ({q0 , q1 , q2 , q3 , q4 , qF }, {a, b, c, [, ]}, δ, q0, qF ),
mit δ durch 1. bis 12. gegeben, die Sprache {[an bn cn ] ; n ≥ 1} akzeptiert.
Beispiel einer Berechnung: das Wort [aac] wird wie folgt berechnet:
(q0 , [aac] ) ` (q0 , [aac] ) ` (q1 , [#ac] ) ` (q1 , [#ac] ) ` (q1 , [#ac] )
und die TM hält, denn es ist kein Übergang (q1 , c) →? definiert. Das Wort [aac]
wird also nicht akzeptiert.
3.2. MODIFIKATIONEN VON TURINGMASCHINEN
3.2
79
Modifikationen von Turingmaschinen
Wir behaupteten in der Einleitung zu diesem Kapitel, dass Turingmaschinen zu
einer starken Leistung fähig sind. Das ist auf den ersten Blick nicht leicht zu erkennen. Aber wir führen jetzt kompliziertere Maschinen ein, mit deren Hilfe schon recht
komplizierte Sprachen akzeptiert werden können. Anschließend zeigen wir, dass sich
alle diese neuen Maschinen auf den einfachen Fall reduzieren lassen. (Das ist keine
Überraschung: erinnern wir uns an die Churchsche These, die behauptet, dass sich
alle Berechnungsmodelle auf TM reduzieren lassen!)
3.2.1
TM mit mehreren finalen Zuständen
Wir können das Konzept der Turingmaschinen zu einer Maschine M = (Q, Σ, δ, q0 ,
F ) verallgemeinern, die der obigen entspricht, nur ist F ⊆ Q eine Menge finaler
Zustände. Jede solche Maschine kann durch die folgende TM
M 0 = (Q ∪ {qF }, Σ, δ 0 , q0 , qF )
simuliert werden: qF ist ein neuer Zustand, und δ 0 besteht aus allen Übergangsregeln, die in δ enthalten sind, und zusätzlich werden in δ 0 noch die folgenden Regeln
(q, s) → (qF , s)
aufgenommen, wobei q ∈ F ein Zustand ist, für den δ(q, s) undefiniert ist. (Also
führen Haltekonfigurationen (q, s) von M , bei denen q final ist, zu Haltekonfigurationen (qF , s) von M 0 .)
3.2.2
TM mit zusätzlichem Gedächtnis
Wir können die Definition einer TM so modifizieren, dass die Maschine in jedem
Schritt zusätzlich einen Zugriff auf ein Gedächtnis hat, wobei Symbole eines endlichen Alphabets A = {a1 , . . . , am } gespeichert werden. Die Übergangsfunktion δ
entscheidet jetzt aufgrund (1) des Zustandes, (2) des gelesenen Symbols aus Σ∪{#}
und (3) des gespeicherten Symbols aus A. Für Initialkonfigurationen nehmen wir
an, dass ein ausgewähltes Symbol a0 ∈ A gemerkt wird.
Beispiel 1. Die Sprache aller Wörter, deren erstes Symbol nie wieder vorkommt,
also
L = {s1 . . . sn ∈ Σ∗ ; s1 6= si für i = 2, . . . , n},
kann durch eine TM mit zusätzlichem Gedächtnis wir folgt akzeptiert werden: die
TM liest das erste Symbol und speichert es im Gedächtnis (also A = Σ, d.h., das
zusätzliche Gedächtnis kann ein Symbol aus Σ speichern). Dann vergleicht die TM
die anschließend gelesenen Symbole mit dem gespeicherten und hält und akzeptiert
nicht, falls sie eine Übereinstimmung feststellt. Sobald die TM das Blanksymbol
liest, hält sie und akzeptiert. Diese TM braucht nur zwei Zustände: q0 , initial und
final, in dem s1 gespeichert wird, und q1 , in dem nach rechts gegangen und mit dem
Speicher verglichen wird.
Bemerkung 1. Eine TM mit zusätzlichem Gedächtnis ist eigentlich eine TM in
dem vorher definierten Sinne, deren Zustandsmenge das kartesische Produkt
Q×A
ist (d. h. die Menge aller Paare (q, a), wobei q ein Zustand und a ∈ A ist). Die
Übergänge der Maschine sind also von (q, a) ∈ Q × A und s ∈ S abhängig. Der
Initialzustand ist (q0 , a0 ), und alle Zustände (qF , a), a ∈ A, sind final.
Zum Beispiel gilt für die Maschine aus Beispiel 1 in Abschnitt 3.1, dass A = Σ (mit
s0 ∈ Σ beliebig gewählt) und die Zustandsmenge
Q = {q0 , q1 } × Σ = {(qi , s); i = 0, 1 und s ∈ Σ}
80
KAPITEL 3. TURINGMASCHINEN
ist. Wir können sie wie folgt als normale“ TM beschreiben, wobei der Initialzustand
”
(q0 , s0 ) auch final ist:
M = (Q, Σ, δ, (q0 , s0 ), (q0 , s0 ))
mit den folgenden Übergangsregeln:
((q0 , s0 ), s) → ((q1 , s), R)
für alle s ∈ Σ
((q1 , s), s0 ) → ((q1 , s), R)
für alle s0 ∈ Σ, s0 6= s
((q1 , s), #) → ((q0 , s0 ), #).
Zum Beispiel wird die Eingabe stt(t 6= s) wie folgt berechnet:
((q0 , s0 ), stt) ` ((q1 , s), stt) ` ((q1 , s), stt) ` ((q1 , s), stt#) ` ((q0 , s0 ), stt#).
Hier hält die TM und akzeptiert.
3.2.3
TM mit erweitertem Bandalphabet
Manchmal ist es geschickt, zusätzliche (Hilfs-)Symbole auf das Band schreiben zu
dürfen, die nicht zum Eingabealphabet gehören. Das bedeutet, dass außer dem
Eingabealphabet Σ noch ein Bandalphabet Γ mit Σ ⊆ Γ gegeben wird und die
Übergangsfunktion δ mit allen Symbolen aus Γ arbeitet, d.h., δ ist eine partielle
Funktion mit Definitionsbereich Q×(Γ∪{#}) und Wertebereich Q×(Γ∪{#, L, R}).
Eine TM mit erweitertem Bandalphabet ist also ein 6-Tupel
M = (Q, Σ, Γ, δ, q0 , qF )
wobei Σ ⊆ Γ das Eingabealphabet und
δ : Q × (Γ ∪ {#}) → Q × (Γ ∪ {#, L, R})
eine partielle Funktion ist. Die Sprache, die M akzeptiert, ist die Sprache
L(M ) ⊆ Σ∗
aller Wörter über dem (kleineren) Eingabealphabet Σ, für die M im Finalzustand
hält.
Beispiel 2. Eine 1-Band TM, die die Sprache {an bn cn ; n ≥ 1} akzeptiert. Hier
haben wir Σ = {a, b, c}, und wir benutzen Γ = {a, b, c, [, ]}. Die TM wird erst die
Eingabe mit [ und ] umklammern:
(q0 , a) → (q0 , L)
(q0 , #) → (q0 , [ )
(q0 , [ ) → (q1 , R)
(q1 , x) → (q1 , R) füR x = a, b, c
(q1 , #) → (q1 , ] ).
Jetzt kann sie die TM von Beispiel 3 in Abschnitt 3.1 simulieren.
Bemerkung 2. Für jede TM mit erweitertem Bandalphabet M gibt es eine ( nor”
male“) TM, die M simuliert. Das Eingabealphabet der neuen TM ist das Bandalphabet Γ von M . Wir überprüfen zuerst (unter Verwendung eines zusätzlichen
Gedächtnisses, das Σ beinhaltet), ob jedes Symbol der Eingabe in Σ liegt. Falls
nein, hält die TM und akzeptiert nicht. Falls ja, wird weiter wie bei M berechnet.
3.2.4
TM mit mehrspurigem Band
Wir arbeiten hier mit einer Modifikation von TM, die darin besteht, dass das Band
in k Spuren unterteilt wird, die alle gleichzeitig gelesen werden. Stellen wir uns erst
vor, dass k = 2 ist. Wir schreiben Symbole aus dem Eingabealphabet Σ = Σ1 auf
Spur 1 und Symbole eines Hilfsalphabetes Σ2 auf Spur 2:
... # 0 1 0 0 1 # # # ...
... # # a # b # # a # ...
⇑
3.2. MODIFIKATIONEN VON TURINGMASCHINEN
81
Die Maschine entscheidet in jedem Schritt abhängig vom Zustand und dem Inhalt
beider Spuren (1) was der nächste Zustand wird und (2) ob sich der Kopf bewegt
oder beide Spuren gleichzeitig überschrieben werden.
Eine 2-Spur-TM ist eigentlich eine TM im vorher definierten Sinne, deren Bandalphabet aus Paaren (s1 , s2 ), mit s1 ∈ Σ1 und s2 ∈ Σ2 , geformt wird. Die einzige
Ausnahme ist das Paar (#, #), das jetzt als Blank-Symbol dient. Also ist eine 2Spur-TM einfach eine TM mit dem Eingabealphabet
Σ = Σ1 × Σ2 − {(#, #)}.
Analoges gilt für k-spurige Maschinen, die auf der i-ten Spur Symbole aus Σi tragen
(i = 1, . . . , k): das sind also die normalen“ TM mit Eingabealphabet
”
Σ = Σ1 × Σ2 × · · · × Σk − {(#, #, . . . , #)}
und mit dem Blanksymbol (#, #, . . . , #).
Beispiel 3. Primzahltest
Wir zeigen, wie man eine 3-spurige TM konstruiert, die die Sprache L aller Primzahlen (in binärer Darstellung) akzeptiert. Hiermit kann man auch gut die Idee
von Turing illustrieren, dass jeder Algorithmus mit einer TM automatisiert werden kann. Wir verwenden hier den primitiven Algorithmus, der jede Zahl n durch
alle Testzahlen 2, 3, 4, . . . , n − 1 teilt und n akzeptiert, falls alle Divisionen einen
positiven Rest ergeben.
EINGABESPUR
TESTZAHLSPUR
HILFSSPUR
...
...
...
1 0 1 1 1
1 0 1
1 0 1 1 1
⇑
q0
...
...
...
Die Spuren der TM sind (1) Eingabespur, die während der Berechnung unverändert
bleibt, (2) Testzahlspur, die am Anfang mit 1 beschriftet wird und in jedem Berechnungsdurchgang um eins vergrößert wird (sodass in dem ersten Berechnungsdurchgang durch 2 dividiert wird, im zweiten mit 3, usw.) und (3) eine Hilfsspur. Wir
schreiben am Anfang also die gegebene Zahl n = 1, 2, 3, . . . auf Spur 1, die Zahl 1
auf Spur 2 und nichts auf Spur 3. Der Initialzustand q0 überprüft (durch Vergleich
mit Spur 2), ob auf Spur 1 eine Zahl n ≥ 2 steht. Im Fall von n = 0 oder n = 1,
wird der Zustand q0 zu
q− , einem nicht-finalen Haltezustand
verändert. (Also werden 0 und 1 nicht akzeptiert.) Falls n ≥ 2 ist, werden Berechnungsdurchgänge rekursiv durchgeführt, die man wie folgt beschreiben kann:
Anfang eines Berechnungsdurchganges: Spur 1 wird auf Spur 3 kopiert. Die Zahl
auf Spur 2 wird um 1 vergrößert. Die Spuren 1 und 2 werden verglichen und falls
die Zahlen gleich sind, wird der Zustand zu
q+ , einem finalen Haltezustand
geändert (die Eingabe wird also akzeptiert, denn keine Zahl kleiner n, die n teilt,
wurde gefunden).
Rumpf eines Berechnungsdurchganges: Die Zahl von Spur 3 wird durch die auf Spur
2 dividiert (z.B. durch wiederholte Subtraktion).
Ende eines Berechnungsdurchganges: Jetzt steht auf Spur 3 der Rest der Eingabe
modulo der Testzahl. Falls der Rest 0 ist, wird der Zustand zu q− verändert. Falls
der Rest positiv ist, wird der Kopf nach links zum ersten Symbol 1 von Spur 1
geschoben und ein neuer Berechnungsdurchgang beginnt.
Es ist leicht einzusehen, dass sich diese informale Beschreibung der Turingmaschine
relativ einfach durch eine formal definierte TM realisieren lässt.
82
3.2.5
KAPITEL 3. TURINGMASCHINEN
TM mit mehreren Bändern
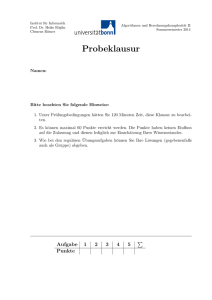
Die nächste Modifikation von TM ist eine Maschine, die mehrere Bänder hat und
bei der auf jedem Band ein Lese-/Schreibkopf steht. Die k Köpfe bewegen sich
unabhängig voneinander und schreiben auch unabhängig voneinander auf ihren individuellen Bändern. Die Kontrolle ist aber zentral (durch den gegebenen Zustand):
Band 1
...
...
⇑X Kopf 1
Band 2
...
• q0
q4 •
...
eeee•2 q1
•ee
•
q3
•
q2
⇑Z Kopf 2
SCHEMA EINER 2-BAND TM
Das bedeutet, dass der Übergangsfunktion δ hier der Zustand q und die k gelesenen
Symbole
k
(s1 , s2 , . . . , sk ) ∈ Σ
zur Verfügung stehen. (Wir bezeichnen mit Ak = A × A × · · · × A die Menge
aller k-Tupel von Elementen aus A). Hier ist Σ die Menge aller Bandsymbole von
allen k Bändern. Als Ergebnis haben wir einen neuen Zustand q 0 und ein k-Tupel
von Symbolen aus {L,R} ∪ Σ ∪ {#}. Das heißt, dass δ eine partielle Funktion mit
Urbildbereich Q × (Σ ∪ {#})k und Wertebereich Q × (Σ ∪ {#,L,R})k ist.
Definition. Eine k-Band-Turingmaschine ist ein Fünftupel M = (Q, Σ, δ, q0 , qF ),
die wie eine TM definiert wird, nur ist δ jetzt eine partielle Funktion mit Urbildbereich Q × (Σ)k und Wertebereich Q × (Σ ∪ {L,R})k .
Die Berechnung durch eine k-Band TM ist analog zum Fall einer 1-Band TM definiert. Eine Konfiguration hat die Form
(q, u1 a1 v1 , u2 a2 v2 , . . . , uk ak vk ),
wobei q der Zustand und ui ai vi der Inhalt des i-ten Bandes bezeichnet. Falls
δ(q, a1 . . . ak ) definiert ist, wird die Folgekonfiguration individuell auf jedem Band
berechnet. Falls δ(q, a1 . . . ak ) undefiniert ist, heißt die Konfiguration Haltekonfiguration. Band 1 dient als Eingabeband, das heißt, die Initialkonfiguration für eine
Eingabe s1 . . . sn ist
(q0 , s1 . . . sn , #, #, . . . , #)
|
{z
}
(k−1)−mal
Die Eingabe wird akzeptiert, falls die Maschine eine Haltekonfiguration mit dem
finalen Zustand erreicht.
Beispiel 4. Eine 2-Band TM, die die Sprache
{an bn cn ; n ≥ 1}
akzeptiert.
Die TM hat ein Eingabeband (Band 1) und ein Hilfsband (Band 2). Band 1 bleibt
unverändert, Band 2 ist am Anfang leer.
3.2. MODIFIKATIONEN VON TURINGMASCHINEN
Band 1
83
a a ... a b b ... b c c ... c # #
⇑
Band 2
# # # ...
⇑
Initialkonfiguration
Erste Etappe der Berechnung: Solange der Kopf 1 a liest, schreibt Kopf 2 a, und
beide Köpfe bewegen sich ein Feld nach rechts. Nur am Anfang schreibt Kopf 2 ein
x anstelle von a.
Band 1
a a ... a b b ... b c c ... c # #
⇑
Band 2
x a ... a # # # ...
⇑
Zweite Etappe: Hier bewegen sich Kopf 1 und Kopf 2 gleichzeitig in entgegengesetzte
Richtungen: Kopf 1 nach rechts und Kopf 2 nach links, bis Kopf 1 c und Kopf 2
x liest. Falls Kopf 1 während dieser Bewegung immer b und Kopf 2 immer a liest,
gehen wir zur dritten Etappe über; falls nicht, hält die TM in einem nicht-finalen
Zustand (Eingabe nicht akzeptiert).
Band 1
. . . ## a a . . . a b b . . . b c c . . .
⇑
Band 2
... # x a ... a # # # ...
⇑
Dritte Etappe: Beide Köpfe bewegen sich gleichzeitig nach rechts, bis Kopf 1 # liest.
Falls in jedem dieser Schritte außer dem letzten Kopf 1 c und Kopf 2 a liest und
falls beide Köpfe im letzten Schritt # lesen, dann hält die TM im finalen Zustand
qF (Eingabe akzeptiert). Falls nicht, hält die TM und akzeptiert nicht.
Formal können wir die Übergänge wie folgt beschreiben:
Erste Etappe:
(q0 , a, #) → (q1 , a, x)
(q1 , a, x) → (q1 , R, R)
(q1 , a, #) → (q1 , a, a)
(q1 , a, a) → (q1 , R, R)
Zweite Etappe: (q1 , b, #) → (q2 , R, L)
(q2 , b, a) → (q2 , R, L)
(q2 , c, x) → (q2 , R, R)
Dritte Etappe: (q2 , c, a) → (q2 , R, R)
(q2 , #, #) → (qF , #, #).
Das sind alle Übergänge für die 2-Band TM mit Bandalphabet Σ̂ = {a, b, c, x}
und Eingabealphabet Σ = {a, b, c}, die die Sprache aller an bn cn (n ≥ 1) akzeptiert.
(Vergleichen Sie das mit Beispiel 3 in Abschnitt 3.1).
Beispiele von Berechnungen: Die Eingabe aabbcc wird wie folgt berechnet:
84
KAPITEL 3. TURINGMASCHINEN
(q0 , aabbcc, #) ` (q0 , aabbcc, x)
` (q0 , aabbcc, x#)
` (q0 , aabbcc, xx)
` (q0 , aabbcc, xx#)
` (q0 , aabbcc, xx#)
` (q0 , aabbcc, xx#)
` (q0 , aabbcc, xx#)
` (q0 , aabbcc#, xx#)
` (qF , aabbcc#, xx#)
und wird akzeptiert. Die Eingabe aabcc wird wie folgt berechnet:
(q0 , aabcc, #) ` (q0 , aabcc, x)
` (q0 , aabcc, x#)
` (q0 , aabcc, xx)
` (q0 , aabcc, xx#)
` (q0 , aabcc, xx)
` (q0 , aabcc, xx#)
und wird nicht akzeptiert.
Bemerkung 3. Simulation einer 2-Band-TM durch eine 1-Band-TM
Sei M = (Q, Σ, δ, q0 , F ) eine 2-Band-TM. Wir konstruieren eine 1-Band-TM mit
zusätzlichem Gedächtnis, M , die die Maschine M Schritt für Schritt simuliert. Das
Band von M ist 4-spurig:
Band 1
... a a b
... # # #
... 0 1 0
... ⇑ # #
a a b a a
⇑
Band 2
0 1 0
⇑
Maschine M
a
⇑
#
#
a
#
#
#
#
#
#
#
#
#
#
#
#
#
#
#
#
#
#
#
...
...
...
...
Maschine M
Band 1 der Maschine M wird auf die Spur 1 von M kopiert, die Kopfposition des
Kopfes von Band 1 steht auf der Spur 2. Analog wird Band 2 auf Spur 3 von M
kopiert und die Kopfposition des Bandes auf Spur 4. Das Eingabealphabet von M
ist also
Σ = (Σ ∪ {#}) × {⇑, #} × (Σ ∪ {#}) × {⇑, #} − {(#, #, #, #)},
wobei (#, #, #, #) das Blank-Symbol ist.
Die Zustände von M und M sind dieselben. Die Maschine M muss sich die letzten
von Kopf 1 und Kopf 2 gelesenen Symbole merken, also hat sie ein zusätzliches
Gedächtnis der Form (s1 , s2 , x), wobei si ∈ Σi ∪ {#} das aktuelle Symbol von Band
i (= 1, 2) der Turingmaschine M ist und x ∈ {l, r} aussagt, ob Kopf 2 (also das
Symbol ⇑ auf Spur 4)links oder rechts von Kopf 1 (dem Symbol ⇑ auf Spur 2)
steht.
1. Anfang der Simulation: Auf Spur 1 steht die Eingabe v1 v2 . . . vn von M , die
Spuren 2 - 4 sind leer. Wir schreiben je ein ⇑ auf die Spuren 2 und 4 unter v1
von Spur 1.
SPUR
SPUR
SPUR
SPUR
1
2
3
4
...
...
...
...
#
#
#
#
v1 v2 . . . vn #
⇑ # ...
# # ...
⇑ # ...
...
...
...
...
3.3. ENTSCHEIDBARE PROBLEME UND REKURSIVE SPRACHEN
85
2. Berechnungsschritt: Am Anfang der Simulation einers Schrittes von M steht
der Kopf von M unter dem Symbol ⇑ auf Spur 2. Das gerade gelesene Symbol
von Spur 1 wird als s1 im zusätzlichen Gedächtnis gespeichert. Danach sucht
der Kopf von M das Symbol ⇑ auf Spur 4: entweder stehen die beiden Symbole ⇑ untereinander, sonst suchen wir links bzw. rechts, falls im zusätzlichen
Gedächtnis x = l bzw. x = r steht. Sobald ⇑ gefunden ist, wird das gerade
gelesene Symbol von Spur 3 als s2 gespeichert. Aufgrund des Zustandes q von
M und des Paares (s1 , s2 ) im zusätzlichen Gedächtnis werden jetzt die Kopfpositionssymbole auf den Spuren 3 und 4 so bewegt, wie die Maschine M die
Köpfe bewegt, und die Symbole auf den Spuren 1 und 3 werden so überschrieben, wie M die Symbole auf beiden Bändern überschreibt. (Das geschieht in
endlich vielen Schritten der Kopfbewegung von M .) Die Eingabe x ∈ {l, r}
im Gedächtnis wir aktualisiert und der Kopf wird nach ⇑ auf Spur 2 bewegt.
3. Ende der Simulation: Die Maschine M hält genau dann, wenn eine Haltekonfiguration von M erreicht wird. Und M akzeptiert genau dann, wenn M
akzeptiert.
Satz 1. Für jede k-Band-TM gibt es eine (1-Band-) TM, die dieselbe Sprache
akzeptiert.
Beweis. Für k = 2 folgt der Beweis aus der gerade beschriebenen Simulation und
dem Fakt, dass eine 4-spurige TM mit zusätzlichem Gedächtnis durch eine TM
simuliert werden kann (siehe Kapitel 3.2.2). Für k > 2 ist der Beweis analog und
wird dem Leser überlassen.
3.3
Entscheidbare Probleme und rekursive Sprachen
Wie oben erwähnt, repräsentiert eine TM eine formale Darstellung des Begriffs eines
Algorithmus, indem sie eine beliebige Eingabe berechnet (und entweder akzeptiert
oder nicht). Die Frage ist, ob wir nur terminierende Algorithmen betrachten dürfen,
oder ob wir auch Algorithmen erlauben, die unendlich lange berechnen. Im Berechnungsmodell der TM entsprechen den terminierenden Algorithmen die TM, die auf
jede Eingabe halten. Das bedeutet, dass das Nichtakzeptieren immer dadurch erfolgt, dass die TM in einem nichtfinalen Zustand hält. Die allgemeineren, nicht
terminierenden Algorithmen werden von allgemeinen TM repräsentiert.
Probleme, die ein terminierender Algorithmus löst, heißen entscheidbar . Die entsprechenden formalen Sprachen werden entweder entscheidbar oder rekursiv genannt. Die allgemeineren Sprachen heißen semientscheidbar oder (aus Gründen, die
wir später erklären) rekursiv aufzählbar:
Definition. Eine Sprache L heißt rekursiv oder entscheidbar , falls es eine Turingmaschine M gibt, die L akzeptiert und auf jede Eingabe hält. Eine Sprache L
heißt rekursiv aufzählbar oder semientscheidbar , falls es eine Turingmaschine
M gibt, die L akzeptiert.
Beispiel 1. Die folgenden Sprachen sind rekursiv, denn die oben konstruierten TM
halten auf jede Eingabe:
1. Die Sprache aller durch 5 teilbaren Zahlen (siehe Beispiel 1 in Abschnitt 3.1).
2. Die Sprache aller Primzahlen (siehe Beispiel 3 in Abschnitt 3.2.4).
86
KAPITEL 3. TURINGMASCHINEN
3. Die Sprache {an bn cn ; n ≥ 1} (siehe Beispiel 4 in Abschnitt 3.2.5 und Satz 1
in Abschnitt 3.2.5).
Beispiel 2. Eine Sprache Lcode, die nicht rekursiv aufzählbar ist.
Es ist nicht möglich, ein natürliches“ Beispiel einer nicht rekursiv aufzählbaren
”
Sprache zu finden, da alle natürlichen“ Beispiele durch irgendeinen Algorithmus
”
beschrieben werden. Aber vorausgesetzt, dass wir eine Codierung für alle TM mit
dem Bandalphabet {0, 1} haben (eine solche Codierung wird in Kapitel 5.1 ausführlich beschrieben), können wir eine konkrete Sprache, die nicht rekursiv aufzählbar
ist, konstruieren. Wir nehmen also an, dass es für jede Turingmaschine M mit Bandalphabet {0, 1} ein Wort c(M ) über {0, 1} gibt, sodass der Code c(M ) die Sprache
der Turingmaschine M vollständig beschreibt. Das heißt, dass für alle Turingmaschinen M und M 0 gilt:
c(M ) = c(M 0 ) ⇒ L(M ) = L(M 0 ).
Mit Lcode bezeichnen wir die Sprache aller Codewörter w = c(M ) solcher Turingmaschinen M , die ihr eigenes Codewort nicht akzeptieren:
Lcode = {w; w = c(M ) für eine Turingmaschine M mit w ∈
/ L(M )}.
Diese Sprache ist nicht rekursiv aufzählbar.
Beweis. Die Annahme, dass es eine Turingmaschine M̂ mit L(M̂) = Lcode gibt,
führt zu einem Widerspruch. Für das Codewort ŵ = c(M̂ ) dieser Maschine M̂
zeigen wir nämlich, dass (a) aus ŵ ∈
/ Lcode folgt ŵ ∈ Lcode und (b) aus ŵ ∈ Lcode
folgt ŵ ∈
/ Lcode. Dann ist weder ŵ ∈ Lcode noch ŵ ∈
/ Lcode wahr.
Zu (a): Da ŵ ∈
/ L(M̂) und ŵ = c(M̂ ), folgt aus der Definition von Lcode, dass
ŵ ∈ Lcode.
Zu (b): Da ŵ ∈ Lcode , gibt es M mit ŵ = c(M ) und ŵ ∈
/ L(M ). Aus c(M ) = c(M̂ )
folgt aber L(M ) = L(M̂); es gilt also ŵ ∈
/ L(M̂) = Lcode.
Bemerkung 1. Jede rekursive Sprache ist selbstverständlich rekursiv aufzählbar,
und jede kontextfreie Sprache ist rekursiv, wie sofort bewiesen wird.
REGULÄR
KONTEXTFREI
REKURSIV
REKURSIV AUFZÄHLBAR
ALLE SPRACHEN
Beispiel 4 in Abschnitt 3.2.5 zeigt, dass die Sprache L = {an bn cn ; n ≥ 1} rekursiv
(aber nicht kontextfrei) ist. Ein Beispiel einer Sprache, die rekursiv aufzählbar aber
nicht rekursiv ist, wird in Kapitel 5 vorgeführt. Dort zeigen wir, dass ein solches
Beispiel die Sprache
Lhalt
aller Wörter c(M )w ist, wobei M eine Turingmaschine und w ein Eingabewort ist,
3.3. ENTSCHEIDBARE PROBLEME UND REKURSIVE SPRACHEN
87
auf das die Turingmaschine M hält. (Das bedeutet, dass das Halteproblem“ nicht
”
entscheidbar ist.)
Beispiel 3. Jede kontextfreie Sprache ist rekursiv. Wir können nämlich den CYKAlgorithmus (Kapitel 2.7) durch eine Turingmaschine, die auf jede Eingabe hält, wie
folgt implementieren. Die TM hat zwei Bänder : Band 1 ist das Eingabeband und
auf Band 2 werden die Mengen Vi,j berechnet. Die TM hat ein zusätzliches Gedächtnis, in dem die Regeln der Grammatik gespeichert werden. Das Bandalphabet von
Band 1 ist also Σ, und Kopf 1 ist ein Lesekopf. Band 2 hat als Bandalphabet die
Potenzmenge 2V aller Mengen von Variablen. Die Felder von Band 2 sind mit zwei
Indizes nummeriert, wir nehmen also an, dass es für jedes Paar i, j = 1, 2, 3, . . .
genau ein Feld xij auf Band 2 gibt.
Band 1
(Eingabeband)
. . . s1 s2 s3 s4 . . . sn
Band 2
(Hilfsband für Vi,j )
...
x11 x12 x22 x13 x23 x33 x14
...
. . . xnn . . .
Im ersten Schritt werden die Felder xi1 , i = 1, . . . , n (wobei n die Länge der Eingabe
ist) mit Vi,1 = {A ∈ V ; A → si ist eine Regel} und die Felder xij , 1 < j ≤ n − i + 1
mit ∅ beschriftet. Der rekursive Schritt wird wie im CYK-Algorithmus durchgeführt:
nachdem alle Felder xi,1 , . . . , xi,j−1 (i ≤ n) beschriftet wurden, wird xi,j mit Vi,j =
{A ∈ V ; A → BC für B ∈ Vi,k und C ∈ Vi+k,j−k , wobei k < j} beschriftet. Am
Ende überprüft die TM, ob im Feld x1n eine Menge, die S enthält, steht oder nicht.
Bemerkung 2. Ein direkter Weg wäre, jeden Kellerautomaten durch eine TM zu
simulieren. Das stieße aber auf die Schwierigkeit, dass Kellerautomaten nichtdeterministisch sind. Wir führen den entsprechenden Begriff für TM in Abschnitt 3.4
ein.
Satz 1. Falls L und L0 rekursive Sprachen sind, sind auch die Sprachen
L + L0 , L ∩ L0 , LL0 und L∗
rekursiv.
Beweis. Sei M eine TM, die L akzeptiert, und M 0 eine TM, die L0 akzeptiert. Wir
nehmen an, dass M und M 0 auf jede Eingabe halten.
1. L + L0 . Diese Sprache wird von einer 2-Band TM akzeptiert, die auf Band 1
die Maschine M und gleichzeitig auf Band 2 die Maschine M 0 simuliert. Falls
beide Maschinen halten, ist der Zustand der neuen Maschine genau dann final,
wenn einer der entsprechenden Zustände (von M oder M 0 ) final ist.
2. L∩L0 . Der Beweis ist analog zu 1., nur ist ein Zustand genau dann final, wenn
beide Zustände (von M sowie von M 0 ) final sind.
3. LL0 . Hier benutzen wir eine 4-Band-Turingmaschine M . Band 1 ist ein Eingabeband mit einem read-only-Kopf. Auf Band 2 steht die Zahl i der Etappe
(am Anfang i = 0). Auf Band 3 wird M simuliert, und auf Band 4 wird M 0
simuliert. Jede Eingabe s1 . . . sn der Länge n wird in n + 1 Etappen berechnet. Die i-te Etappe besteht daraus, dass das Wort s1 . . . si auf Band 3 und
das Wort si+1 . . . sn auf Band 4 kopiert werden, und dann simuliert unsere
TM die Maschine M auf Band 2 und die Maschine M 0 auf Band 3, bis beide
Maschinen M und M 0 halten. Falls sie beide akzeptieren, hält auch M und
akzeptiert. Falls M oder M 0 nicht akzeptiert und i < n, wird die nächste
Etappe mit i := i + 1 durchgeführt. Falls M oder M 0 nicht akzeptiert und
i = n, hält M und akzeptiert nicht.
88
KAPITEL 3. TURINGMASCHINEN
4. L∗ . Dieser Beweis ist analog zu 3. Zunächst prüft M , ob das Eingabeband leer
ist und akzeptiert gegebenenfalls. Ansonsten erzeugen wir auf Band 2, statt
nur einer Zahl i allein, alle möglichen aufsteigenden Listen (i0 , i1 , . . . , ir ) von
Zahlen mit
0 = i 0 < i1 < i2 < · · · < i r = n
wobei r = 1, . . . , n.
Band 3 simuliert M : wir kopieren erst s1 s2 . . . si1 auf Band 3 und, falls die
Simulation in einem finalen Zustand von M hält, si1 +1 si1 +2 . . . si2 auf Band 3
und, falls die Simulation wieder in einem finalen Zustand hält, si2 +1 . . . si3 auf
Band 3 usw. Falls alle Simulationen in finalen Zuständen von M halten, wird
die Eingabe von M akzeptiert. Falls irgendeine der Simulationen in einem
nichtfinalen Zustand hält, beginnt eine neue Etappe (mit der nächsten Liste
auf Band 2). Wenn alle Listen auf Band 2 durchgegangen worden sind, ohne
dass bis dahin M akzeptiert hat, hält M in einem nichtfinalen Zustand.
Bemerkung 3. Die Bezeichnung rekursiv aufzählbar“ für die von TM akzeptier”
ten Sprachen stammt von einer anderen Weise, wie TM angewendet werden können:
zur Erzeugung von Sprachen. Wir beginnen mit dem leeren Band, also mit der Konfiguration
(q0 , ###)
und lassen die TM berechnen (bis sie hält, oder unendlich lange, falls sie nie hält).
Alle Konfigurationen, die den finalen Zustand qF haben, werden durchsucht und
das Wort w rechts vom Lesekopf wird notiert; die Konfiguration hat also die Form
(qF , vsw) (v ∈ Σ∗ , s ∈ Σ), und wir notieren w. Die Sprache aller Wörter w, die so
auf dem Band erzeugt werden, wird mit G(M ) bezeichnet. Formale Definition:
G(M ) = {w; w ∈ Σ∗ und es existieren v ∈ Σ∗ und s ∈ Σ
mit (q0 , ###) `∗ (qF , vsw)}
Wir nennen G(M ) die von M aufgezählte Sprache.
Beispiel 4. Die TM
M = ({q0 , q1 , qF }, {|}, δ, q0, qF )
mit den Übergangsregeln
(q0 , |) → (q1 , L)
(q0 , #) → (q0 , |)
(q1 , |) → (qF , L)
(q1 , #) → (q1 , |)
(qF , #) → (q0 , |)
berechnet die leere Eingabe wie folgt:
(q0 , ###) ` (q0 , #|#)
` (q1 , #|#)
` (q1 , #||#)
` (qF , #||#)
also || ∈ G(M )
` (q0 , #|||#)
` (q1 , #|||#)
` (q1 , #||||#)
` (qF , #||||#) also |||| ∈ G(M )
` (q0 , #|||||#)
..
.
Wir sehen, dass M die Sprache aller positiven geraden Zahlen aufzählt.
Satz 2. Jede Sprache G(M ), die von einer Turingmaschine M aufgezählt wird, ist
rekursiv aufzählbar.
Beweis. Wir konstruieren eine 2-Band Turingmaschine M 0 , die die Sprache G(M )
akzeptiert. Band 1 ist ein read-only-Eingabeband. Auf Band 2 wird die Maschine
3.3. ENTSCHEIDBARE PROBLEME UND REKURSIVE SPRACHEN
89
M simuliert (mit einem zu Beginn leeren Band 2). Jedesmal, wenn M ihren finalen
Zustand erreicht, überprüft die Maschine M 0 , ob das Wort rechts des Kopfes auf
Band 2 mit der Eingabe auf Band 1 übereinstimmt. Falls ja, hält M 0 und akzeptiert.
Falls nein, geht die Simulation auf Band 2 weiter. Dann gilt L(M 0 ) = G(M ).
Satz 3. Jede rekursiv aufzählbare Sprache L kann durch eine Turingmaschine aufgezählt werden, d.h. hat die Form L = G(M ) für eine Turingmaschine M .
Beweis.
1. Für jede rekursive Sprache L zeigen wir, dass L von einer TM aufgezählt werden kann. Wir haben also eine Turingmaschine M0 mit
L = L(M0 ),
die auf jede Eingabe hält. Wir konstruieren eine 4-Band-TM M , die die Sprache L aufzählt (und dann simulieren wir M mit einer 1-Band-TM).
...
|
{z
...
k−mal
...
...
Band 1: L(M0 ) wird aufgezählt
}
Band 2: Schrittzähler
Band 3: Alle Wörter der Länge ≤ k über Σ
werden erzeugt
Band 4: Simuliert M0 mit Eingabe aus Band 3
Am Anfang sind alle Bänder leer. Die Maschine M schreibt in Etappe Nummer
k die Zahl k auf Band 2 (am Anfang ist k = 0) und erzeugt auf Band 3
systematisch alle Wörter s1 . . . sn über Σ mit n ≤ k.
Jedes Wort s1 . . . sn auf Band 3 wird von M auf Band 4 kopiert, und anschließend simuliert M auf Band 4 die Maschine M0 mit dieser Eingabe. Falls
s1 . . . sn von M0 akzeptiert wird, wird das Wort auf Band 1 kopiert, der Kopf
wird ein Feld links von s1 gestellt und der Zustand zu qF geändert. Danach
wird Band 1 wieder gelöscht. Falls s1 . . . sn nicht akzeptiert wird, wird das
nächste Wort auf Band 3 erzeugt, oder, falls schon alle geprüft wurden, die
nächste Etappe (k := k + 1 auf Band 2) wird begonnen.
Es ist klar, dass die Maschine M auf Band 1 die Sprache L(M0 ) aufzählt.
2. Für jede rekursiv aufzählbare (aber nicht notwendigerweise rekursive) Sprache
zeigen wir, dass L von einer TM aufgezählt werden kann. Der Unterschied zum
Fall 1. ist der, dass M0 hier nicht immer halten muss. Wir lösen dieses Problem,
indem wir die Simulation von M0 immer nur für höchstens k Schritte (wobei
k der Inhalt des Bandes 2 ist) erlauben. Das heißt: falls M0 auf die Eingabe
aus Band 3 in höchstens k Schritten hält und akzeptiert, aktivieren wir den
Kopf auf Band 1 wie oben. Falls M0 entweder in höchstens k Schritten hält
und nicht akzeptiert, oder nach k Schritten noch nicht gehalten hat, gehen
wir zum nächsten Wort auf Band 3 (oder zur nächsten Etappe) über.
90
3.4
KAPITEL 3. TURINGMASCHINEN
Nichtdeterministische Turingmaschinen
Analog zum Fall nichtdeterministischer Automaten führen wir hier nichtdeterministische TM ein. Statt einer partiellen Funktion δ : Q × Σ → Q × Σ ∪ {L,R} haben
wir hier eine Relation δ:
Definition. Eine nichtdeterministische Turingmaschine M (NTM) ist ein
Fünftupel M = (Q, Σ, δ, q0 , qF ), das wie eine TM definiert wird, außer dass hier δ
eine Relation
δ ⊆ [Q × Σ] × [Q × (Σ ∪ {L,R})]
ist.
Wir schreiben, wie oben,
(q, s) → (q 0 , s0 )
falls die Relation δ das Quadrupel (q, s, q 0 , s0 ) enthält. Der ganze Unterschied bezüglich der Notation zwischen einer TM und einer nichtdeterministischen TM ist,
dass für eine deterministische TM für zwei beliebige Übergangsregeln
(q, s) → (q 0 , s0 ) und (q, s) → (q 0 , s0 )
gilt, dass, falls die linken Seiten gleich sind (q = q und s = s), auch die rechten
Seiten gleich sein müssen (q 0 = s0 und s0 = s0 ). Für nichtdeterministische TM gilt
keine solche Einschränkung.
Beispiel 1. stochastischer Zahlengenerator.
Wir beschreiben eine nichtdeterministische Turingmaschine M , die auf ihr Band
entweder eine beliebige Zahl n ≥ 1 (in binärer Form) schreibt und hält oder nie
hält. Im Initialzustand q0 schreibt M eine 1 und geht zum Zustand q1 , in dem die
folgende Wahl getroffen wird: entweder wird der Haltezustand qF erreicht, oder es
wird ein neues Symbol 0, 1 geschrieben und (unter Verwendung eines Hilfezustandes
q2 ) der Kopf nach rechts bewegt.
Formal:
M = ({q0 , q1 , q2 , qF }, {0, 1}, δ, q0, qF )
wobei δ durch die folgenden Übergangsregeln beschrieben wird:
(q0 , #) → (q0 , 1)
(q0 , 1) → (q1 , R)
(q1 , #) → (q2 , 0)
(q1 , #) → (q2 , 1)
(q1 , #) → (qF , #)
(q2 , i) → (q1 , R)
für i = 0, 1.
Beispiel:
3.4. NICHTDETERMINISTISCHE TURINGMASCHINEN
...
91
...
⇑
q0
...
1
⇑
q0
...
...
1
...
⇑
q1
...
1 0
⇑
q2
...
...
1 0
...
⇑
q1
...
1 0 1
⇑
q2
...
...
1 0 1
...
⇑
q1
...
1 0 1
...
⇑
qF
Konfigurationen und die Berechnung von Eingaben sind genauso definiert wie für
die (deterministischen) TM. Hier hat eine Eingabe natürlich nicht nur eine, sondern
mehrere Berechnungen.
Definition. Eine nichtdeterministische Turingmaschine M akzeptiert die Eingabe
w ∈ Σ∗ , falls es für w mindestens eine Berechnung gibt, so dass M nach endlich vielen Schritten eine Haltekonfiguration mit dem finalen Zustand erreicht. Die Sprache
aller Eingaben, die M akzeptiert, wird mit L(M ) bezeichnet.
Bemerkung 1. Die k-Band-TM lassen sich analog zu den nichtdeterministischen
k-Band-TM verallgemeinern: hier ist δ eine Relation
k
δ ⊆ [Q × Σ ] × [Q × (Σ ∪ {L,R})k ].
Beispiel 2. Test der Zerlegbarkeit.
Wir zeigen eine nichtdeterministische 3-Band-TM, die die Sprache L ⊆ {|}∗ aller
zerlegbarer Zahlen, also Zahlen der Form
n = pq mit p > 1 und q > 1
akzeptiert.
Wie in Beispiel 3 in Abschnitt 3.2.4 hat M ein Eingabeband, ein Testzahlband und
ein Hilfsband. Im Initialzustand schreibt M die Zahl zwei (||) auf Band 2 (jede
Testzahl ist größer oder gleich ||) und verändert den Zustand zu q1 . In q1 , dem
einzigen nichtdeterministischen Zustand, gibt es zwei Möglichkeiten: entweder wird
ein neuer Strich auf Band 2 geschrieben, und der Zustand q1 bleibt, oder der Zustand
verändert sich zu q2 .
Im Zustand q2 wird wie folgt deterministisch berechnet:
92
KAPITEL 3. TURINGMASCHINEN
1. Die Zahl n auf Band 1 wird mit der Zahl m auf Band 2 verglichen. Falls n ≤ m
ist, hält die Maschine, ohne zu akzeptieren.
2. Falls n > m, wird n auf Band 3 kopiert.
3. Band 2 wird von Band 3 abgezogen, bis auf Band 3 der Rest der Division von
n durch die Testzahl steht. Dann hält die Maschine.
4. Falls Band 3 leer ist, wird die Eingabe akzeptiert, falls Band 3 nicht leer ist,
wird sie nicht akzeptiert.
Wir sehen, dass die Testzahl m eine beliebige Zahl m = 2, 3, 4, . . . sein kann. Die
Eingabe n wird genau dann akzeptiert, wenn es ein m < n gibt, das n teilt.
Beispiel 3. Simulation eines Kellerautomaten
Wir können einfach jeden Kellerautomaten durch eine nichtdeterministische 2Band-Turingmaschine M simulieren, bei der auf Band 1 die Eingabe des Kellerautomaten und auf Band 2 der Kellerinhalt steht. M hat ein zusätzliches Gedächtnis, in
dem die Übergangsregeln des Kellerautomaten notiert werden. Am Anfang schreibt
die NTM das Symbol k0 auf Band 2. Jede Übergangsregel
(q, s, k) → (q 0 , k1 . . . kn ), s ∈ Σ,
des Kellerautomaten wird wie folgt simuliert:
Band 1
Band 2
. . . s s0 s00 . . .
⇑
. . . k k 0 k 00 . . .
⇑
Übergang
. . . s s0 s00 . . .
⇑
k1 . . . kn k 0 k 00 . . .
⇑
Falls die Maschine M im Zustand q die Symbole s (Band 1) und k (Band 2) liest,
ändert sie ihren Zustand zu q 0 , bewegt den Kopf 1 einen Schritt nach rechts und
macht folgendes auf Band 2:
1. Falls n 6= 0 (also k1 . . . kn 6= ε), wird k von kn überschrieben, und der Kopf 2
schreibt, sich nach links bewegend, die Symbole kn−1 , . . . , k1 .
2. Falls n = 0, löscht Kopf 2 das Symbol k und bewegt sich einen Schritt nach
rechts.
Analog wird jede spontane Übergangsregel
(q, #, k) → (q 0 , k1 . . . kn )
simuliert: der einzige Unterschied ist, dass hierbei Kopf 1 stehenbleibt.
Satz 1. Jede NTM kann durch eine (deterministische) TM simuliert werden.
Beweis. Sei M eine NTM, und sei r eine Zahl, so dass es für jedes Paar (q, s) aus
Q × (Σ ∪ {#}) höchstens r Übergänge (q, s) → (q 0 , s0 ) gibt. Dann können wir die
Übergänge durchnummerieren:
(q, s) → (q 0 i , s0 i ) für i = 1, 2, . . . , r
(Wiederholungen sind erlaubt). Die einzige Ausnahme ist δ(q, s) = ∅ (Haltekonfiguration).
Wir simulieren M mit einer 4-Band-TM wie folgt: Band 1 ist das Eingabeband mit
einem read-only Kopf. Auf Band 2 werden systematisch alle Zahlen k = 0, 1, 2, 3, . . .
3.5. BERECHENBARE FUNKTIONEN
93
geschrieben, sie geben die Länge der Berechnung vor. Auf Band 3 werden systematisch alle k-Tupel aus Zahlen 1, . . . , r erzeugt (k = 1, 2, 3, . . . ). Auf Band 4 werden
für jeden Eintrag
i1 i2 . . . i k
von Band 3 die ersten k Takte der Maschine M simuliert, aber in jedem Takt
wählen wir den Übergang, dessen Index auf Band 2 steht. Also wird im Takt n der
Übergang (q, s) → (q 0 in , s0 in ) gewählt, wobei q der momentane Zustand ist und s
das gerade gelesene Symbol. In einer Haltekonfiguration von M mit q = qF hält
M und akzeptiert die Eingabe, andernfalls, also auch bei Haltekonfigurationen mit
q 6= qF wird k erhöht und die Simulation fortgesetzt. Es gibt also die folgenden
Möglichkeiten für die Berechnung einer Eingabe w:
1. M hält auf w nach k Schritten für irgendeine Zahl k und akzeptiert w, d.h.,
es gibt eine akzeptierende Berechnung der Länge k von w. Dann hält auch M
auf w und akzeptiert w (mit einem der r k möglichen Inhalte von Band 3);
2. M akzeptiert w nicht, d.h., alle von M bei Eingabe w erreichbaren Haltekonfigurationen haben einen von qF verschienedenen Zustand. Dann hält M nie,
denn M schreibt immer länger werdende k-Tupel (k = 1, 2, 3, . . . ) auf Band
2. Damit gehört w weder zu L(M ) noch zu L(M).
Es folgt, dass L(M ) = L(M).
Korollar 1. Jede von einer nichtdeterministischen TM akzeptierte Sprache ist rekursiv aufzählbar.
Satz 2. Falls L und L0 rekursiv aufzählbare Sprachen sind, sind auch die Sprachen
L + L0 , L ∩ L0 , LL0
und
L∗
rekursiv aufzählbar.
Beweis. Für L + L0 und L ∩ L0 ist der Beweis gleich dem für rekursive Sprachen
(siehe Satz 1 in Abschnitt 3.3).
LL0 : sei M eine TM, die L akzeptiert, und M 0 eine TM, die L0 akzeptiert. Wir
definieren eine nichtdeterministische 4-Band-TM M , die LL0 akzeptiert. Band 1 ist
das Eingabeband mit der Eingabe s1 s2 . . . sn , auf Band 2 schreibt M nichtdeterministisch eine Zahl i = 0, 1, 2, . . . , auf Band 3 wird M mit Eingabe
s1 s2 . . . si
simuliert, und auf Band 4 wird M 0 mit Eingabe
si+1 . . . sn
simuliert. Die Maschine M akzeptiert genau dann, wenn sowohl M als auch M 0
halten und akzeptieren.
L∗ : Dieser Beweis ist analog zu LL0 , nur werden auf Band 2 statt nur einer Zahl
i nichtdeterministisch Listen (i0 , i1 , . . . , ir ) von Zahlen mit 0 ≤ i0 < i1 < · · · <
ir ≤ n geschrieben, und auf Band 3 wird M mit Eingabe s1 . . . si , si1+1 . . . si2 ,
. . . , sir−1+1 . . . sir simuliert. Falls M alle diese Eingaben akzeptiert, hält M und
akzeptiert.
3.5
Berechenbare Funktionen
Wie im Fall endlicher Automaten, können auch Turingmaschinen nicht nur als Akzeptoren von Sprachen, sondern als Maschinen für die Berechnung von Funktionen
betrachtet werden. Hier benötigen wir sogar keine Modifikation der Maschine, denn
94
KAPITEL 3. TURINGMASCHINEN
sie kann das Ergebnis einfach auf das Band schreiben. Allgemein können wir Berechnungen von Funktionen von Σ∗ nach Γ∗ formalisieren, wobei Σ das Alphabet
ist, in dem die Eingaben codiert werden, und Γ das Alphabet der Ausgaben.
Definition. Wir sagen, eine Turingmaschine M berechnet die Funktion
f : Σ ∗ → Γ∗
falls das Eingabealphabet von M die Menge Σ ∪ Γ enthält, die Maschine M auf jede
Eingabe w aus Σ∗ hält und der Bandinhalt dann gleich f (w) ist.
Beispiel 1. Die Funktion
f (n) = 2n,
wobei n unär (über Σ = {|}) dargestellt ist, wird von der folgenden TM berechnet:
falls das erste Symbol # ist (also n = 0), hält die TM. Falls das erste Symbol | ist,
löscht die Maschine dieses Symbol, geht nach links, schreibt | vor das letzte Symbol
| am linken Wortrand, geht nach rechts und schreibt das gelöschte Symbol | wieder
(q0 , |) → (q1 , #)
(q1 , #) → (q2 , L)
(q2 , |) → (q2 , L)
(q2 , #) → (q3 , |)
hin usw.:
(q3 , |) → (q3 , R)
(q3 , #) → (q4 , |)
(q4 , |) → (q0 , R)
Genauer, die TM
M = ({q0 , q1 , q2 , q3 , q4 , qF }, {0, 1}, δ, q0, qF ),
deren Übergangsfunktion δ oben gegeben ist, berechnet die Funktion f (n) = 2n.
Beispiel 2. Die Funktion
f : Σ∗ → {|}∗
der Länge der Worte
f (s1 s2 . . . sn ) = n (unär dargestellt)
wird von der folgenden TM berechnet:
M = ({q0 }, Σ ∪ {|}, δ, q0 , q0 ),
wobei δ wie folgt definiert wird
(q0 , x) → (q0 , |)
für alle x ∈ Σ
(q0 , |) → (q0 , R)
Bemerkung.
1. Wie im Fall von Sprachenakzeptanz können wir auch für Funktionen den Begriff der TM modifizieren und zum Beispiel eine Mehrband-TM
benutzen. Es ist dann üblich, Band 1 als Eingabeband und Band 2 als Ausgabeband (mit Inhalt f (w), nachdem die TM hält) zu verwenden.
2. Der Finalzustand spielt bei Berechnungen keine Rolle (und könnte, für diese
Anwendung der TM, aus der Definition entfernt werden).
3. Für Funktionen zweier (oder mehrerer) Variablen werden die verschiedenen
Variablen voneinander durch eine leere Zelle getrennt. Also zum Beispiel eine
Funktion f (w1 , w2 ) zweier Variabler aus Σ∗ mit Werten in Γ∗ wird von einer
TM berechnet, falls die TM auf jede Eingabe w1 #w2 mit Bandinhalt f (w1 , w2 )
hält.
Beispiel 3. Addition. Wir wollen die Funktion
f (n, m) = n + m (unär dargestellt)
durch eine TM berechnen: es genügt, das erste Symbol |“ zu streichen und die
”
Lücke, die die zwei Variablen voneinander trennt, durch |“ zu ersetzen:
”
3.5. BERECHENBARE FUNKTIONEN
95
(q0 , |) → (q1 , #)
(q0 , #) → (qF , R)
(q1 , #) → (q2 , R)
(q2 , |) → (q2 , R)
(q2 , #) → (qF , |)
Genauer, die TM
M = ({q0 , q1 , q2 , qF }, {|}, δ, q0, qF )
mit der oben definierten Übergangsfunktion δ berechnet die Addition in unärer
Darstellung.
Beispiel 4. Multiplikation. Die Funktion
f (n, m) = n ∗ m (unär dargestellt)
kann von der folgenden 2-Band-TM berechnet werden:
Band 1 ist das Eingabeband, aus Band 2 schreibt die Maschine n-mal hintereinander die Zahl m, das heißt, m Symbole |“. Dann hält sie und hat auf Band 2
”
(Ausgabeband) die Zahl n ∗ m.
Definition. Eine Funktion (einer oder mehrerer Variablen) von Σ∗ nach Γ∗ heißt
berechenbar oder Turing-berechenbar, falls sie durch eine TM berechnet werden
kann.
Beispiele 1. f (n) = 2n, f (n, m) = n + m, f (n, m) = n ∗ m und die Funktion
f : Σ∗ → N , die die Länge berechnet, sind berechenbar.
Bemerkung.
4. Wer der Churchschen These glaubt, erwartet, dass jede durch
einen (terminierenden) Algorithmus gegebene, voll-definierte Funktion durch
eine TM berechenbar sein muss: man implementiert einfach den Algorithmus
auf einer TM.
5. Für partiell definierte Funktionen f : Σ∗ → Γ∗ können wir auch den Begriff
von Berechnung durch eine TM einführen: die Situation, bei der f (w) nicht
definiert ist, entspricht der Berechnung der Eingabe w, wobei die TM nicht
hält:
Definition. Eine TM berechnet die partielle Funktion f : Σ∗ → Γ∗ , falls ihr Eingabealphabet Σ ∪ Γ enthält und die TM auf jede Eingabe w aus Σ∗ genau dann hält,
wenn f (w) definiert ist, und sie dann den Bandinhalt f (w) hat. Solche Funktionen
heißen partiell-berechenbar .
Beispiel 5. Division.
Die Funktion
n : m (ganzzahlig) falls m 6= 0
f (n, m) =
undefiniert
falls m = 0
kann von der folgenden 2-Band-TM berechnet werden: Band 1 ist das Eingabeband,
auf Band 2 schreibt die TM erst n und dann versucht sie, m Striche auf Band 2
wegzuwischen“. Falls dies nicht möglich ist, hält sie. Falls es jedoch möglich ist,
”
versucht die Maschine erneut, m Striche auf Band 2 zu löschen und so weiter.
Beispiel 6. Eine unberechenbare Funktion β :
→
.
Diese Funktion, die als busy beaver“ (fleißiger Biber) bekannt ist, ist wie folgt
”
definiert:
β(0) = 0
und für jedes n > 0 ist
β(n) = k,
96
KAPITEL 3. TURINGMASCHINEN
falls k die größte Zahl ist, die eine TM mit n Zuständen auf die leere Eingabe
schreiben kann. D.h., die TM hält auf der leeren Eingabe mit |k auf dem Band. Wir
können β(n) einfach bestimmen, wenn wir alle TM mit n Zuständen durchgehen
(und die, die auf die leere Eingabe nicht halten, ausschließen). Die TM mit der
einzigen Übergangsregel (q0 , #) → (q0 , |) schreibt | auf die leere Eingabe. Daraus
folgt
β(1) ≥ 1.
Aber jede Maschine mit nur einem Zustand, die mehr als einen Strich auf die leere
Eingabe schreibt, hält nie. Also gilt β(1) = 1. Bei zwei Zuständen darf δ nur auf
drei Elementen der vierelementigen Menge Q × Σ definiert sein, damit die Maschine
hält. Daraus folgt sofort
β(2) = 2.
Im allgemeinen gilt
(∗) β(n + 2) > β(n) für jedes n.
In der Tat, falls β(n) = k, d.h., falls eine Turingmaschine M mit n Zuständen |k
schreibt, konstruieren wir eine Turingmaschine, M 0 , die n + 2 Zustände hat und
|k+1 schreibt – woraus β(n + 2) ≥ k + 1 > β(n) folgt. Wir fügen zwei neue Zustände
q 0 und q 00 zu den Zuständen von M hinzu. Hält M im Zustand q auf einem Feld |,
so ergänzen wir M um drei neue Übergangsregeln:
(q, |) → (q 0 , L)
(q 0 , |) → (q 0 , L)
(q 0 , #) → (q 00 , |).
Hält dagegen M im Zustand q auf einem Feld #, so kann sich dieses Feld wegen
der Maximalität von β(n) nur direkt neben dem Ergebnis |k von M befinden. Wir
können M nun um die Übergangsregel (q, #) → (q 00 , |) ergänzen. In jedem Fall hält
die Maschine M 0 im Zustand q 00 , nachdem sie |k+1 geschrieben hat.
Satz 1. Für jede berechenbare Funktion f (n) gibt es eine Konstante r mit der
Eigenschaft, dass
β(n + r) ≥ f (n) für alle n.
Beweis. f (n) wird von einer Turingmaschine M berechnet. Sei r die Zahl aller
Zustände von M . Wir konstruieren für jede Zahl n eine Turingmaschine Mn , die
n + r Zustände hat und f (n) Striche auf die leere Eingabe schreibt – damit ist
β(n + r) ≥ f (n) bewiesen. Zu den Zuständen von M werden n neue Zustände q 0
(initial), q 1 , . . . , q n−1 hinzugefügt, sodass Mn auf die leere Eingabe n-mal einen |
schreibt und sich dabei nach links bewegt:
für i = 0, . . . , n − 1
(q i , #) → (q i , |)
(q i , |)
→ (q i+1 , L) für i = 0, . . . , n − 2
(q n−1 , |) → (q0 , |)
Der letzte Übergang bedeutet, dass von jetzt an die Maschine M (mit der Eingabe
|n ) simuliert wird – sie schreibt also |f (n) und hält.
Korollar 1. Die busy-beaver-Funktion β(n) ist nicht Turing-berechenbar.
Falls nämlich β(n) berechenbar wäre, müsste auch β(2n) berechenbar sein (wir
hätten eine TM, die erst die Zahl aller |0 e der Eingabe verdoppelt, siehe Beispiel 1
und dann die TM für β(n) simuliert). Dann würde es eine Konstante r geben mit
β(n + r) ≥ β(2n) für alle n.
Speziell ergibt n = r + 2
β(2r + 2) ≥ β(2r + 4),
ein Widerspruch zu (∗).
Bemerkung 1. Obwohl β(1) = 1, β(2) = 2 und β(3) = 3, gilt β(10) > 4000 (es
existiert eine DTM mit 10 Zuständen, die 4098 schreibt und hält. Dazu benötigt
die TM über 200 Mio. Berechnungsschritte).
Kapitel 4
Churchsche These
Die Churchsche These behauptet, dass die intuitive Klasse aller berechenbaren
”
Funktionen“ mit den formal definierten Turing-berechenbaren Funktionen übereinstimmt. Diese These kann zwar nicht bewiesen werden, aber sie lässt sich untermauern, indem man beweist, dass andere natürliche formale Darstellungen des
Algorithmenbegriffs dasselbe Ergebnis liefern. Z. B. kann eine Funktion mit Hilfe von PASCAL genau dann auf einem modernen Rechner implementiert werden,
wenn sie Turing-berechenbar ist. In diesem Kapitel zeigen wir verschiedene Modelle
des Algorithmenbegriffs und beweisen, dass alle diese Modelle äquivalent zu Turingmaschinen sind. Es ist trotzdem möglich, dass irgendwann ein neues, generell
akzeptables Modell für Algorithmen gefunden wird, das allgemeiner als Turingmaschinen ist – aber niemand hält so etwas heute für wahrscheinlich.
Die Tatsache, dass moderne Rechner und Turingmaschinen dieselbe Mächtigkeit besitzen, illustrieren wir an RAMs (oder Registermaschinen), die realen Rechnern viel
näher als Turingmaschinen stehen. Wir beweisen exakt, dass Turing-berechenbare
und RAM-berechenbare Funktionen dieselben Klassen formen.
Ein Modell ganz anderen Stils ist die formale Grammatik, eine Verallgemeinerung
kontextfreier Grammatiken. Wir beweisen, dass eine Sprache genau dann von einer
solchen Grammatik erzeugt werden kann, wenn sie von einer Turingmaschine akzeptiert werden kann. Schließlich widmen wir uns den rekursiven Funktionen und
zeigen auch hier, dass diese genau die Turing-berechenbaren Funktionen sind.
4.1
RAM
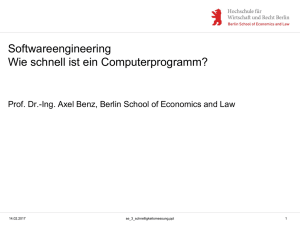
Eine RAM, d.h. Random-Access-Maschine (oder Registermaschine) ist ein Modell
einer Berechnung, die realen Rechnern dadurch näher steht als TM, dass sie Programm und Datei separat behandelt. Gemeinsam mit TM hat dieses Modell aber die
präzise mathematische Definition und die Annahme, dass eine unbegrenzte Speicherkapazität zur Verfügung steht. Die einzelnen Register haben die Fähigkeit, beliebig
große Zahlen zu enthalten.
97
98
KAPITEL 4. CHURCHSCHE THESE
Eingabeband
Zeile:
0
READ 0
1
LOAD 3
13 0 1 0
⇑
2
/ BZ
k
|
...
STOP
{z
}
Programm
STEUEREINHEIT
o
SPEICHER
/ R0 R1 R2 . . .
↑
Akkumulator
⇓
2 0 14
Ausgabeband
SCHEMA EINER RAM
Eine RAM besteht aus den folgenden Komponenten:
1. Eine Steuereinheit, die über ein Programm verfügt. Ein Programm ist eine
durchnummerierte Liste von Befehlen, die weiter unten aufgeführt sind. Die
Steuereinheit enthält ein Register, das Befehlszähler (BZ) heißt und dessen
Inhalt <BZ>= i eine natürliche Zahl ist. Das bedeutet, dass der Befehl Nr. i
auszuführen ist.
2. Einen Speicher , der aus durchnummerierten Registern R0, R1, R2, . . . besteht. Jedes Register Ri enthält eine natürliche Zahl <Ri>. Das Register R0
heißt Akkumulator .
3. Einem Eingabeband, das aus Feldern besteht. Jedes Feld enthält eine natürliche Zahl. (Ein Feld, das 0 enthält, wird als leer angenommen – das entspricht
unserer Darstellung N = {|}∗ .) Auf dem Eingabeband steht ein read-only
Kopf, der nur lesen und sich dann sofort ein Feld nach rechts bewegen kann.
Die gelesene Zahl wird mit <read> bezeichnet.
4. Einem Ausgabeband, das aus Feldern besteht und auf dem ein write-only Kopf
steht, der nur ein Feld beschriften und sich anschließend sofort ein Feld nach
rechts bewegen kann.
Die RAM arbeitet taktweise: in jedem Takt wird der Befehl aus der Zeile <BZ>
durchgeführt.
Anfang der Berechnung: Die Eingabe steht auf dem Eingabeband, das Ausgabeband
ist leer, und alle Register (einschließlich des Befehlszählers und des Akkumulators)
sind leer (Zahl 0).
Ende der Berechnung: Die Berechnung endet, falls
1. die Instruktion STOP durchgeführt wird oder
2. eine GOTO m Instruktion durchgeführt wird, obwohl kein Befehl die Nummer
m hat.
4.1. RAM
99
Hier ist die Liste aller Befehle:
Befehl
Wirkung
READ
<R0>:=<read>, <BZ>:=<BZ> + 1, der Lesekopf bewegt
sich nach rechts
WRITE
Der Schreibkopf schreibt <R0> und bewegt sich nach
rechts, <BZ>:=<BZ> + 1.
LOAD i
<R0>:=<Ri> und <BZ>:=<BZ> + 1
STORE i
<Ri>:=<R0> und <BZ>:=<BZ> + 1
ADD i
<R0>:=<Ri> + <R0> und <BZ>:=<BZ> + 1
PRED
<R0>:=pred <R0> und <BZ>:=<BZ> + 1. Hier gilt:
pred (n + 1) = n und pred 0 = 0.
GOTO m
<BZ>:= m
m
falls Ri = 0
IF Ri = 0 GOTO m <BZ>:=
<BZ>
+
1
sonst
m
falls <Ri> > 0
IF Ri > 0 GOTO m <BZ>:=
<BZ> + 1 sonst
STOP
Maschine hält.
Bemerkung 1. Für indirekte Adressierung dürfen wir ∗i (statt i) benutzen,
z.B. hat LOAD ∗i die Wirkung <R0>:=<<Ri>> (also wird im Akkumulator der
Inhalt des Registers, dessen Adresse in Ri steht, gespeichert). Analog für STORE ∗i
und ADD ∗i. Außerdem benutzen wir !i statt i für Konstanten: z.B. hat STORE !i
die Wirkung <R0>:= i und <BZ>:=<BZ> + 1.
Die obige Liste von Befehlen ist kurz, um das Modell übersichtlich zu gestalten,
aber weitere Befehle lassen sich leicht programmieren:
Beispiel 1. SUCC i. Wir wollen den Befehl benutzen, der den Inhalt des Registers
Ri um eins erhöht. SUCC i ist dann dieses Unterprogramm:
LOAD !1
o[1 in den Akkumulator]
ADD i
[<Ri>:=<Ri> +1]
STORE i
Beispiel 2. PRED i. Der Befehl, der die Wirkung <Ri>:=<Ri> −1, falls <Ri>
> 0 ist, hat, lässt sich analog programmieren.
Beispiel 3. SUB i. Der Befehl, der die folgende Wirkung <Ri> − <R0>, falls
<Ri> ≥ <R0> und R0 := 0 ansonsten hat, hat das folgende Programm:
0. IF R0 = 0 GOTO 4
1. PRED
2. PRED i
3. GOTO 0
4. LOAD i
Beispiel 4. IF Ri = k GOTO m. Für jede Konstante k können wir diesen Sprungbefehl durch das folgende Unterprogramm ersetzen:
LOAD !k
SUB i
STORE i
IF Ri = 0 GOTO m
Beispiel 5. Multiplikation. Die Funktion f (n, m) = n ∗ m kann wie folgt programmiert werden: wir speichern erst die Eingabe n in R1 und m in R2:
100
KAPITEL 4. CHURCHSCHE THESE
0. READ
1. STORE 1
2. READ
3. STORE 2
Jetzt wird R1 solange zu R3 (= Speicher des Ergebnisses) addiert, bis <R2>= 0 ist,
wobei bei jedem Schritt <R2>:=<R2> − 1 gesetzt wird. Falls <R2>= 0, springen
wir zur Zeile a, die den WRITE-Befehl ausführt:
4. IF R2 = 0 GOTO a
5. LOAD 1
6. ADD 3
7. STORE 3
8. PRED R2
9. GOTO 4
a = 10. LOAD 3
11. WRITE
Beispiel 6. Simulation einer Turingmaschine.
Für jede TM können wir ein Programm für RAM schreiben, das die Arbeit der TM
Schritt für Schritt simuliert. Wir nehmen an, dass die Zustände der TM durchnummeriert sind:
Q = {q0 , q1 , . . . , qn }, wobei q0 der Initialzustand ist,
sowie auch die Symbole des Bandalphabetes:
def.
Σ = {s1 , s2 , . . . , sm } und s0 = #.
Schließlich werden auch die Felder des Bandes durchnummeriert: 0 für das erste
Feld der Eingabe und 1, 2, 3, . . . für die weiter rechts stehenden Felder. Um die
Notation zu vereinfachen, nehmen wir an, dass die TM die Felder links von 0 nie
besucht. (Sonst könnten wir z.B. die Felder rechts von 0 nur mit geraden Zahlen
nummerieren und die links von 0 stehenden mit ungeraden Zahlen.)
Um die Simulation zu vereinfachen, nehmen wir weiter an, dass die TM ein Spezialsymbol @ benutzt, das immer als letztes Symbol auf dem Band steht. Die Eingabe
si0 . . . sik hat also die Form
...
s i0 s i1 s i2
s ik @ # # . . .
k k+1k+2
0 1 2
Bei der obigen Nummerierung von Σ sei @ = sm . Die Eingabe wird im Eingabeband
der RAM entsprechend codiert:
...
i0 i1 i2
ik m 0 0 . . .
Die Register der RAM spielen die folgende Rolle:
R0
(Akkumulator)
R1
(Zustand)
enthält i, falls die TM im Zustand qi ist
R2
(Kopfposition) enthält k + 2, falls der Kopf am Feld k steht
R(3 + i) (Bandinhalt)
enthält t, falls im Feld i das Symbol st steht.
Das Programm der RAM, das die TM simuliert, besteht aus drei Teilen:
Teil 1 sorgt dafür, dass die Eingabe
...
s i0 s i1 s i2
s in @ = s m
...
in die Register R3, R4, . . . , R(3 + n) und R(3 + n + 1) gelesen wird. Wir lesen also
(mit READ) die Eingaben so lange, bis m (der Index von @ = sm ) gelesen wird. Dabei
lassen wir die Register R1 und R2 zunächst leer. Es ist einfach, so ein Programm
mit Hilfe der obigen Beispiele 1 bis 3 in Abschnitt 4.1 zu schreiben:
0. LOAD !3
1. STORE 2
4.1. RAM
2.
3.
4.
5.
6.
101
READ
STORE ∗2
IF R0 = m GOTO 7
SUCC 2
GOTO 2
Teil 2 (in den gesprungen wird, falls die Eingabe m ist) beginnt damit, das der Kopf
nach links gestellt wird (<R2>:= 4) und der Zustand q0 (<R1>:= 0) ist.
Dann werden die einzelnen Zeilen der Übergangstabelle programmiert. In dem Fall,
dass kein Übergang existiert, wird zu Teil 3 (Ausgabe) gesprungen.
Teil 3 des Programms schreibt <R3>, <R4>, . . . , bis es auf die Zahl <Rk>:= m
(d.h. auf das Endsymbol @) stößt. Dann hält es:
Zeile Befehl
k LOAD !3
k + 1 STORE 4
[Am Anfang: <R6>= 3]
k + 2 LOAD 2
k + 3 WRITE
k + 4 SUCC 2
k + 5 IF R0 = m GOTO (k + 7)
k + 6 GOTO (k + 2)
k + 7 STOP
Beispiel 7. RAM-Simulation einer einfachen TM.
Die folgende TM realisiert die Funktion SUCC:
M = ({q0 , q1 }, {|, @}, δ, q0, q1 )
mit den folgenden Übergängen
(1) (q0 , |) → (q0 , R)
(2) (q0 , @) → (q1 , |)
(3) (q1 , |) → (q1 , R)
(4) (q1 , #) → (q1 , @)
Die Simulation hat die drei oberen Teile, wobei Teil 2 wie folgt die vier Übergänge
simuliert:
Zeile Befehl
Kommentar
7. LOAD !3
8. STORE 2
Initialposition des Kopfes (+ 3)
9. LOAD ∗2
n R0 steht das momentan gelesene Symbol
10. IF R1 = 0 GOTO a a-Übergänge (1), (2) (Zustand q0 )
11. IF R0 = 1 GOTO b Hier Zustand q1 , b-Übergang (3)
12. IF R0 = 0 GOTO c Hier Zustand q1 , c-Übergang (4)
13. GOTO k
Zustand q1 , Symbol @-Sprung in den Teil 3
a = 14. IF R0 = 1 GOTO d d-Übergang (1)
15. IF R0 = 2 GOTO e e-Übergang (2)
d = 16. SUCC 2
Kopf nach rechts
GOTO 9
e = 17. LOAD !1
Statt @ = 2 wird | = 1 geschrieben
18. STORE ∗2
19. STORE 1
Zustand q1
20. GOTO 9.
b = 21. SUCC 2
Kopf nach rechts
22. GOTO 9.
c = 23. LOAD !2
24. STORE ∗2
25. GOTO k
Also ist Zeile k = 26 der Anfang von Teil 3
102
4.2
KAPITEL 4. CHURCHSCHE THESE
RAM-Berechenbarkeit
Definition. Eine RAM berechnet eine Funktion f (n1 , n2 , . . . , nk ), deren Variablen
und Werte in liegen, falls die RAM auf die Eingabe n1 , n2 , . . . , nk hält und auf dem
Ausgabeband m (nur eine Zahl) steht, wobei f (n1 , . . . , nk ) = m. Eine Funktion, die
von einer (geeignet programmierten) RAM berechnet werden kann, heißt RAMberechenbar .
Beispiel 1. Die Funktionen
f (n, m) = n + m und f (n, m) = n ∗ m
sind RAM-berechenbar.
Das Programmieren von RAMs ist zwar im Vergleich zu modernen Programmiersprachen aufwendig und kompliziert, trotzdem ist es nicht schwer zu zeigen, dass
jede Funktion, die sich mit einem PASCAL-Programm berechnen lässt, auch in einer
RAM programmiert werden kann.
Obwohl Turingmaschinen weniger realistisch als RAMs sind (und viel einfacher),
sind sie keineswegs schwächer:
Satz 1. Jede RAM-berechenbare Funktion ist Turing-berechenbar.
Beweis. Wir haben ein RAM-Programm für die Funktion f (a1 , . . . , ak ), und wir
simulieren es mit einer 6-Band TM mit zusätzlichem Gedächtnis wir folgt:
...
ak $
Band 1 (Eingabeband)
$ a1 $ a2 $
Band 2 (Speicher)
$ $ 1 $
Band 3 (Akkumulator)
<R0>
Band 4 (Befehlszähler)
<BZ>
<R1> $$ 2 $
<R2>
$ $ ...
Band 5 (Hilfsband)
Band 6 (Ausgabeband)
f (a1 , . . . , ak )
Die TM hat also das Bandalphabet Σ = {|, $}, und die Eingabe der RAM wird
mit Trennungssymbolen $ auf Band 1 geschrieben. Band 2 enthält den Speicher
der RAM: falls Register Ri benutzt wurde und momentan n enthält, finden wir auf
Band 2 die Kombination
$ $ i $ n $$,
was <Ri>= n bedeutet.
(Wir können aber mehrere solcher Kombinationen mit demselben i auf Band 2
finden. In diesem Fall nehmen wir nur die, die am weitesten rechts steht). Band
3 enthält den Inhalt des Akkumulators und Band 4 den des Befehlszählers. Band
6 ist das Ausgabeband. Das (endliche) Programm der RAM ist im zusätzlichen
Gedächtnis der TM gespeichert.
Anfang der Simulation: Alle Bänder außer Band 1 sind leer. Speziell wird Befehl
Nr. 0 (<BZ>= 0) simuliert.
Simulation der Befehle: Es wird immer der Befehl, dessen Zeilennummer auf Band
4 steht, simuliert. Wir zeigen einige Beispiele:
READ
Auf Band 1 steht der Kopf unter $, jetzt bewegt er sich, bis er auf dem
nächsten $ stehen bleibt, wobei die Zahl ai auf Band 3 geschrieben
wird. Danach wird der Befehlszähler (Band 4) um 1 erhöht.
STORE i Auf Band 2 wird nach dem letzten Symbol $ die Kombination i $ n $
$ geschrieben, wobei n der Inhalt des Akkumulators (Band 3) ist.
4.3. GRAMMATIKEN UND TURINGMASCHINEN
STORE ∗i
103
Auf Band 3 steht eine Zahl n. Diese soll in das Register Rj, wobei
j der Inhalt von Ri ist, gespeichert werden. Also sucht der Kopf auf
Band 2 die (am weitesten rechts stehende) Konfiguration
$ $ i $ j $ $,
und wenn er sie gefunden hat, schreibt er j auf das Hilfsband 5. Jetzt
schreibt die TM auf Band 2 hinter das letzte Symbol $ die Kombination j $ n $ $.
Der Leser sollte jetzt keine Schwierigkeiten haben, jeden Befehl der RAM entsprechend zu simulieren. Wenn die RAM hält, hält auch die TM (nachdem sie die
Instruktion WRITE simuliert hat). Sie hat dann f (a1 , . . . , ak ) auf dem Ausgabeband.
Korollar 1. RAM-berechenbare und Turing-berechenbare Funktionen sind dieselben.
In der Tat ist jede Turing-berechenbare Funktion RAM-berechenbar: siehe Beispiel
6 in Abschnitt 4.1.
4.3
Grammatiken und Turingmaschinen
In Kapitel 2 sprachen wir von kontextfreien Grammatiken, die es erlauben, eine Variable durch ein Wort zu ersetzen. Das ist ein Spezialfall einer Grammatik (auch
unbeschränkte Grammatik oder Grammatik des Typs 0 genannt), die es allgemein
erlaubt, ein Wort durch ein anderes zu ersetzen. Es zeigt sich, dass diese Grammatiken genau die rekursiv aufzählbaren Sprachen definieren. In diesem Sinn erhalten
wir also ein vollkommen neues Modell von Sprachen, die Turing-akzeptierbar sind.
Definition. Eine Grammatik G ist ein Quadrupel G = (Σ, V, S, R), wobei Σ das
Alphabet aller Terminalsymbole, V das Alphabet aller Variablen (zu Σ disjunkt),
S ∈ V das Startsymbol und R eine endliche Menge an Paaren (α, β) von Wörtern
über Σ ∪ V mit α 6= ε ist.
Bemerkung 1. Elemente (α, β) aus R werden mit
α→β
bezeichnet und werden Produktionen oder Ersetzungsregeln genannt. Die Anwendung einer Regel α → β auf ein Wort w ist genau dann möglich, wenn w die
Form
w = w0 αw00
(w0 , w00 Wörter über Σ ∪ V )
hat. Das Ergebnis der Anwendung ist das Wort
w0 βw00 .
Notation.
1. Mit ⇒ bezeichnen wir die Anwendung einer einzigen Regel; also
schreiben wir für zwei Wörter u, w in (Σ ∪ V )∗
u ⇒ v,
falls es eine Regel α → β in R und Wörter u1 , u2 in (Σ ∪ V )∗ gibt, so dass
u = u1 αu2 und v = u1 βu2 .
2. Mit ⇒∗ bezeichnen wir die reflexive und transitive Hülle der Relation ⇒.
Definition. Für jede Grammatik G heißt die Menge aller Wörter über Σ, die vom
Startsymbol ableitbar sind, die Sprache L(G) erzeugt durch G. Kürzer:
L(G) = {w ∈ Σ∗ ; S ⇒∗ w}.
Alle oben definierten Begriffe verallgemeinern die in Kapitel 2 eingeführten Begriffe
für kontextfreie Sprachen. Aber die allgemeinen Grammatiken erzeugen Sprachen,
die nicht kontextfrei sein müssen:
104
KAPITEL 4. CHURCHSCHE THESE
Beispiel 1. Eine Grammatik für die Sprache
{|, ||, ||||, . . . } = {2n ; n ∈ }
(die nicht kontextfrei ist! ). Die Idee ist, dass wir mit dem Wort [A] anfangen und
die Zahl von A’s verdoppelt werden kann. Dafür verwenden wir eine Variable D, die
links auftauchen kann (also [ → [D) und rechts verschwinden kann (also D] → ]),
und die auf ihrem Weg nach rechts A verdoppelt: DA → AAD. Am Ende bekommen
wir [AA · · · A], wobei die Anzahl der A’s gleich 2n ist. Jetzt brauchen wir nur die
Klammern zu entfernen und A in | umwandeln. Formal:
G = ({|}, {S, A, D, [, ]}, S, R),
wobei R die folgenden Produktionen sind:
(1) S → [A]
(2) [
→ [D
(3) D] → ]
(4) DA → AAD
(5) [
→ε
(6) ]
→ε
(7) A → |
Es gilt:
L(G) = {2n ; n ∈ }.
Beweis. Erst zeigen wir, wie 2n abgeleitet wird, also {2n ; n ∈
S ⇒ [A]
Regel (1)
⇒∗ [Dn A]
Regel (2) n-mal
⇒ [Dn−1 AAD]
Regel (4) 1-mal
⇒∗ [Dn−2 AAAAD2 ] Regel (4) 2-mal
..
.
⇒∗
⇒∗
⇒
⇒
⇒
n
[A2 Dn ]
n
[A2 ]
n
A2 ]
n
A2
n
2
Regel
Regel
Regel
Regel
Regel
} ⊆ L(G):
(4) n-mal
(3) n-mal
(5)
(6)
(7)
Ist umgekehrt w eine Zahl ist, also ein Wort über {|} mit S ⇒∗ w, beweisen wir
w = 2n , das heißt L(G) ⊆ {2n ; n ∈ }. Sei
S ⇒ w1 ⇒ w2 ⇒ · · · ⇒ w k ⇒ w
eine Ableitung von w. Bezeichnen wir durch m die Anzahl von Indizes i, für welche
die Regel (2) die Basis für wi ⇒ wi+1 ist. Da wk kein D enthält, musste die Regel
(3) genau m-mal angewandt werden. Dabei wurde die Anzahl der A’s bei jedem
Durchgang“ eines D’s (von links also [D, nach rechts, d. h. D]) immer verdoppelt,
”
da dieser Durchgang nur auf Grund der Regel (4) möglich ist. Am Anfang gibt es
genau ein A: aus S ⇒ w1 folgt w1 = [A]. Also entstehen im Laufe der Ableitung
genau 2m Symbole A. Da das terminale Symbol | nur durch die Regel (7) erscheinen
kann und wk = w keine Variablen enthält, beweist dies, dass
m
w = |2 .
Beispiel 2. Eine Grammatik für die (nicht kontextfreie) Sprache L = {an bn cn ;
n ≥ 1}. Sei
G = ({a, b, c}, {B, C, S}, S, R)
die Grammatik mit den Regeln
(1) S → aBC | aSBC
(2) CB → BC
(3) aB → ab
(4) bB → bb
(5) bC → bc
(6) cC → cc
4.3. GRAMMATIKEN UND TURINGMASCHINEN
105
Das Wort an bn cn , n ≥ 1, liegt in L(G), da es sich wie folgt ableiten lässt:
S ⇒∗ an−1 S(BC)n−1 [Regel S → aSBC, (n − 1)-mal angewendet]
⇒ an (BC)n
[Regel S → aBC]
⇒∗ a n B n C n
[Regel BC → CB, (n − 1)-mal angewendet]
⇒ an bB n−1 C n
[Regel aB → ab]
⇒∗ a n bn C n
[Regel bB → bb, (n − 1)-mal angewendet]
⇒
⇒∗
an bn cC n−1
a n bn cn
[Regel bC → bc]
[Regel cC → cc, (n − 1)-mal angewendet]
Umgekehrt beweisen wir, dass nur Wörter der Form an bn cn ableitbar sind. In der
Tat: falls w ein Wort ist, das von S ableitbar ist und keine Variable enthält, beweisen
wir das folgende:
1. Die Anzahl von a’s im Wort w ist dieselbe wie die von b’s und dieselbe wie die
von c’s . In der Tat, die Regeln (2) - (6) ändern die Anzahl der Buchstaben a,
b/B oder c/C nicht, und Regel (1) erhöht alle drei dieser Zahlen gleichzeitig
um 1.
2. Alle a’s stehen links im Wort w, das heißt, w hat die Form w = an v (und v
besteht aus n b’s und n c’s ). Keine der Regeln (1) - (6) ändert nämlich die
linke Position von a.
3. Das Wort w enthält nicht die Kombination cb (das heißt, w hat nicht die Form
w = ucbv). Um das zu beweisen, betrachten wir die Regeln (3) - (6): diese
ändern weder Anzahl noch Position der Buchstaben a, b/B oder c/C im Wort,
sie wandeln nur B → b oder C → c um. Wir können daher annehmen, dass
in der Ableitung S ⇒∗ w zuerst nur die Regeln (1) und (2) benutzt werden,
und dann erst werden die Regeln (3) - (6) angewendet. Genauer: es gibt eine
Ableitung:
S ⇒ w1 ⇒ w2 ⇒ · · · ⇒ wi ⇒ · · · ⇒ wk = w,
wobei für S ⇒ · · · ⇒ wi nur die Regeln (1) und (2) angewendet werden und
für wi ⇒ · · · ⇒ wk nur die Regeln (3) - (6). Dann unterscheiden sich die
Wörter wi und wk nur dadurch, dass an der Stelle im Wort, an der b steht,
wi den Buchstaben B hat und dasselbe gilt analog für c/C. Das Wort wi
enthält die Kombination CB nicht, denn keine der Regeln (3) - (6) kann B in
b umwandeln, falls vor diesem B entweder C oder c steht. Es folgt, dass das
Wort w = wk die Kombination cb nicht enthält.
4. w = an bn cn , denn in 2. haben wir ein Wort v mit n b’s, n c’s und ohne die
Kombination cb – das einzige Wort ist v = bn cn .
Beispiel 3. Simulation einer TM.
Wir zeigen jetzt, wie die Arbeit einer TM vollständig von einer Grammatik simuliert
werden kann. Erinnern wir uns an das Konzept von Konfigurationen (q, u, a, v) aus
Kapitel 3.1:
...
...
a
} ⇑|
{z
}
v
q
Die Konfigurationen werden jetzt statt (q, uav) durch das Wort [uqav] über Σ ∪ Q ∪
{[, ], #} bezeichnet. Also ist die Initialkonfiguration mit Eingabe s1 . . . sn das Wort
[q0 s1 . . . sn ].
|
{z
u
Die Arbeit der TM wird durch die Relation ` ( Folgekonfiguration“) beschrieben.
”
Wir konstruieren jetzt eine Grammatik G, in der für zwei Konfigurationen gilt:
106
KAPITEL 4. CHURCHSCHE THESE
[uqav] ` [u0 q 0 a0 v 0 ] genau dann, wenn [u0 q 0 a0 v 0 ] ⇒ [uqav].
(Also beschreibt die Ableitung in der Grammatik G die Berechnung rückwärts.)
Wir benutzen die Bandsymbole Σ der TM als terminale Symbole und die folgenden
Variablen:
V = Q ∪ {S, #, [, ]};
wir setzen V ∩ Σ = ∅ wie üblich voraus. Also
G = (Σ, V, S, R),
und die Produktionen R entsprechen den Möglichkeiten von ` (siehe Tabelle 3.1 in
Abschnitt 3.1):
1. Für jede Übergangsregel (q, s) → (q 0 , s0 ) der TM mit s0 in Σ ∪ {#} haben
wir die Folgekonfigurationen [uqsv] ` [uq 0 s0 v], und wir benötigen also die
Produktion (in der Gegenrichtung)
(1) q 0 s0 → qs.
2. Für jede Übergangsregel (q, s) → (q 0 , R) der TM haben wir die Folgekonfigurationen
[uqsv] ` [usq 0 v] falls v 6= ε
und
[uqs] ` [usq 0 #] falls v = ε.
Wir benötigen dafür die Produktionen
(2) sq 0 → qs
(3) sq 0 #] → qs]
3. Für jede Übergangsregel (q, s) → (q 0 , L) brauchen wir die Produktionen
(4) q 0 s0 s → s0 qs
∀s0 ∈ Σ ∪ {#}
0
(5) [q #s → [qs
Nehmen wir jetzt an, dass die TM ein Wort s1 . . . sn über Σ akzeptiert, und
dass sie ihr Eingabeband löscht, bevor sie hält. Dann haben wir eine Berechnung, die mit der Initialkonfiguration [q0 s1 . . . sn ] beginnt und mit der
Finalkonfiguration [qF #] endet. Das heißt, aufgrund der Produktionen (1) (5) gibt es eine Ableitung (in der Gegenrichtung!)
[qF #] ⇒ . . . ⇒ [q0 s1 . . . sn ].
Wir fügen jetzt drei Produktionen hinzu, so dass wir dann vom Startsymbol
S das Wort s1 . . . sn ableiten:
(6) S → [qF #]
(7) [q0 → ε
(8) ] → ε
Wir haben also die Grammatik
GM = (Σ, V ∪ {#, [, ], S}, S, R)
mit den Produktionen (1) - (8). Wir beweisen jetzt, dass sie die Sprache L(M )
erzeugt.
Satz 1. Falls M eine TM ist, die ihr Band immer löscht, bevor sie hält, dann gilt
für die obige Grammatik GM , dass L(M ) = L(GM ).
Beweis.
1. Jedes Wort w = s1 . . . sn , das M akzeptiert, ist aus GM ableitbar, das heißt, L(M ) ⊆ L(GM ). In der Tat, für eine gegebene Berechnung,
die in der Konfiguration [q0 s1 . . . sn ] beginnt und in [qF #] endet, seien k0 =
[q0 s1 . . . sn ] ` k1 ` . . . ` kM = [qF #] die Konfigurationen der Berechnung.
Dann gilt
S ⇒ [qF #] ⇒ kM −1 ⇒ kM −2 ⇒ · · · ⇒ k1 ⇒ [q0 s1 . . . sn ] ⇒∗ s1 . . . sn ,
wobei am Anfang die Produktion (6) und am Ende die Produktionen (7) und
(8) verwendet wurden. Also gehört s1 . . . sn zu L(GM ).
4.3. GRAMMATIKEN UND TURINGMASCHINEN
107
2. Sei w = s1 . . . sn ein Wort, das von S ableitbar ist. Wir haben eine Ableitung
der Form
S ⇒ [qF #] ⇒ w1 ⇒ w2 ⇒ . . . ⇒ wM = s1 . . . sn .
Wir dürfen annehmen, dass die Regeln (7) und (8) (die bestimmt angewendet
wurden, da w1 die beiden Klammern enthält, aber wM nicht) erst am Ende
der Ableitung angewendet wurden, also wM −2 = [q0 s1 . . . sn ]. Für die Ableitung w1 ⇒∗ wM −2 wurden nur die Regeln (1) - (6) angewendet. Es ist also
hinreichend, zu zeigen, dass, falls für zwei Konfigurationen w und w 0 , w0 ` w
aufgrund von (1) - (6) gilt, dann folgt daraus w ` w 0 .
(a) Falls die Produktion (1) angewendet wurde, gilt w 0 = [uq 0 s0 v] und w =
[uqsv], wobei qs → q 0 s0 eine Übergangsregel ist. Dann ist w 0 eine
Folgekonfiguration von w.
(b) Falls die Produktion (2) angewendet wurde, gilt w 0 = [usq 0 v] und w =
[uqsv]. Wieder ist w 0 eine Folgekonfiguration von w.
(c) Falls die Produktion (3) angewendet wurde, gilt w 0 = [usq 0 #] und w =
[uqs], und auch diesmal ist w 0 eine Folgekonfiguration von w. Analog mit
den Produktionen (4) und (5).
Also für w1 = [qF #] und wM −2 = [q0 s1 . . . sn ] folgt aus w1 ⇒∗ wM −2 , dass
wM −2 `∗ w1 . Das bedeutet, dass die TM auf die Eingabe s1 . . . sn hält und
akzeptiert. Also gehört s1 . . . sn zu L(M ).
Korollar 1. Für jede rekursiv-aufzählbare Sprache L gibt es eine Grammatik, die
L erzeugt.
Beweis. Es gibt eine TM, die L akzeptiert. Sei M eine Modifikation dieser TM,
die sich nur dadurch unterscheidet, dass M ihr Band löscht, bevor sie hält. Dann
gilt
L = L(M ) = L(GM ).
Beispiel 4. Die folgende TM akzeptiert die Sprache aller ungeraden Zahlen (über
Σ = {|}):
M = ({q0 , q1 , q2 }, {|}, δ, q0, qF )
mit Übergängen
(q0 , |) → (q1 , #)
(q1 , #) → (qF , R)
(qF , |) → (q2 , #)
(q2 , #) → (q0 , R)
Dieser TM entspricht die folgende Grammatik
GM = ({|}, {q0 , q1 , q2 , #, [, ], S}, S, R)
mit den Produktionen
S
→ [qF #]
q1 #
→ q0 |
#qF
→ q1 #
#qF #] → q1 #]
q2 #
→ qF |
#q0
→ q2 #
#q2 #] → q2 #]
[q0
→ε
]
→ε
Satz 2. Jede von einer Grammatik erzeugte Sprache ist rekursiv-aufzählbar.
108
KAPITEL 4. CHURCHSCHE THESE
Beweis. Wir wollen zeigen, dass für jede Grammatik G die Sprache L(G) von einer
TM akzeptiert werden kann. Wir benutzen eine nichtdeterministische 2-Band-TM,
die alle Produktionen von G in einem zusätzlichen Gedächtnis hat. Band 1 ist ein
read-only Eingabeband. Auf Band 2 schreibt die TM zu Beginn das Startsymbol S.
In jedem Berechnungsschritt zerlegt die TM nichtdeterministisch das Wort w auf
Band 2 in drei Wörter:
w = upv
u, p, v ∈ (Σ ∪ V )∗ mit p 6= ε.
Zum Beispiel ist am Anfang die einzige mögliche Zerlegung u = ε, p = S und
v = ε. Jetzt wählt die TM nichtdeterministisch eine Produktion von G von der Form
p → q (falls keine solche Produktion existiert, hält die TM in einem nichtfinalen
Zustand). Dann schreibt die TM das Wort w 0 = uqv auf Band 2 und vergleicht
Band 1 mit Band 2. Falls die Inhalte gleich sind, hält die TM und akzeptiert. Falls
sie nicht gleich sind, wird der neue Berechnungsschritt (Zerlegung des Wortes w 0 in
drei Wörter usw.) gestartet.
Es ist klar, dass die Eingabe auf Band 1, falls sie von S ableitbar ist, nach endlich
vielen Berechnungsschritten (die der Ableitung der Eingabe aus S entsprechen)
akzeptiert wird. Falls umgekehrt die Eingabe nicht zu L(G) gehört, ist jede mögliche
Berechnung entweder unendlich oder hält und akzeptiert nicht.
4.4
Chomsky-Hierarchie
In den 50er Jahren hat der berühmte Linguist Noah Chomsky formale Grammatiken
eingeführt und spezielle Typen untersucht, von denen wir in diesem Skript schon
einige kennengelernt haben:
Grammatiken vom Typ 3 sind genau die regulären Grammatiken, die wir in Kapitel
2.4 eingeführt haben. Also die, die nur Produktionen der Form
A → b1 . . . bn oder A → b1 . . . bn B
(A, B sind Variablen und b1 , . . . , bn terminale Symbole) haben dürfen. Wie wir aus
2.4 wissen, erzeugen die regulären Grammatiken genau die regulären Sprachen.
Grammatiken vom Typ 2 sind genau die kontextfreien Grammatiken aus Kapitel 2.
Hier haben die Produktionen die Form
A → a 1 . . . an
(A ist eine Variable, a1 , . . . , an sind terminale Symbole oder Variablen). Die entsprechenden Sprachen sind die kontextfreien Sprachen.
Grammatiken vom Typ 1 werden auch kontextsensitive Grammatiken genannt. Wir
werden sie jetzt einführen und untersuchen. Die Produktionen haben hier die Eigenschaft, dass die Länge der linken Seite der Produktionen kleiner gleich der Länge
der rechten Seite ist.
Grammatiken vom Typ 0 heißen auch uneingeschränkte Grammatiken (weil es keine Einschränkung für die Produktionen gibt) oder einfach Grammatiken. Diese
haben wir in Abschnitt 4.3 eingeführt. Sie entsprechen genau den rekursiv-aufzählbaren Sprachen.
Definition. Eine Grammatik heißt kontextsensitiv oder Typ-1-Grammatik, falls
in jeder Produktion
α → β
die Länge von α kleiner gleich der Länge von β ist. Eine Sprache heißt kontextsensitiv, falls sie von einer kontextsensitiven Grammatik erzeugt werden kann. Daraus
folgt, dass eine kontextsensitive Sprache nie ε enthält. (Einige Autoren erlauben
deswegen auch die Regel S → ε in kontextfreien Grammatiken. Wir aber nicht!)
4.4. CHOMSKY-HIERARCHIE
109
Beispiel 1. Die Sprache {an bn cn ; n ≥ 0}, die nicht kontextfrei ist (siehe 1 in
Abschnitt 2.4) ist kontextsensitiv. In der Tat ist die Grammatik in Beispiel 1 in
Abschnitt 4.3 offensichtlich kontextsensitiv.
Beispiel 2. Jede kontextfreie Sprache, die ε nicht enthält, ist kontextsensitiv. Das
folgt aus der Chomsky-Normalform, die immer kontextsensitiv ist, siehe 2.7.
Bemerkung 1. Der Name kontextsensitiv“ stammt von der folgenden Form der
”
Produktionen:
uAw → uvw,
wobei A eine Variable und v ein nicht leeres Wort über Σ ∪ V ist. Jede derartige
Produktion erlaubt uns, A durch v zu ersetzen, falls sich A im Kontext u?w befindet.
Es zeigt sich, dass jede kontextsensitive Sprache mit Hilfe dieser Regeln gegeben
werden kann:
Satz 1. Jede kontextsensitive Sprache kann von einer Grammatik mit Produktionen
uAw → uvw,
(A Variable; u, v, w Wörter in (Σ ∪ V )∗ und v 6= ε) erzeugt werden.
Beweis. Sei G eine kontextsensitive Grammatik. Jede Produktion
A1 A2 . . . An → B 1 B2 . . . Bm
(n ≤ m)
wird durch Produktionen des obigen Typs ersetzt. Wir nehmen an, dass Ai Variablen sind. (Sonst ersetzen wir Ai durch Variable Ai ∗ und fügen die Produktionen
Ai ∗ → Ai hinzu.) Falls n = 2, ersetzen wir
A1 A2 → B 1 B2 . . . Bm
(m ≥ 2)
durch die folgenden vier Produktionen, die neue Variablen C1 und C2 enthalten:
A1 A2
→ C 1 A2
C1 A2
→ C 1 C2
C1 C2 B3 . . . B m → C 1 B2 B3 . . . B m
C1 B2 B3 . . . B m → B 1 B2 B3 . . . B m .
Jede dieser Produktionen hat die gewünschte Form. Und es ist klar, dass diese
Ersetzung keinen Einfluss auf die erzeugte Sprache hat.
Analog ersetzen wir für n = 3
A1 A2 A3 → B 1 B2 . . . Bm
(m ≥ 3)
durch sechs Produktionen mit neuen Variablen C1 , C2 , C3 wie folgt:
A1 A2 A3
→ C 1 A2 A3
C1 A2 A3
→ C 1 C2 A3
C1 C2 A3
→ C 1 C2 C3
C1 C2 C3 B4 . . . B m → C 1 C2 B3 B4 . . . B m
C1 C2 B3 B4 . . . B m → C 1 B2 B3 B4 . . . B m
C1 B2 B3 B4 . . . B m → B 1 B2 B3 B4 . . . B m
Usw. für alle n ≥ 2.
Beispiel 3. Eine Grammatik für {an bn cn ; n ≥ 1}, die nur Produktionen vom Typ
uAw → uvw hat. Wir nehmen die Grammatik aus Beispiel 2 in Kapitel 4.3 und
wenden die Prozedur des obigen Beweises darauf an. Statt
CB → BC
schreiben wir
CB → C1 B
C1 B → C 1 C2
C1 C2 → BC2
BC2 → BC
Bemerkung 2. Die Entscheidung, ob für einen gegebenen gerichteten Graphen
G und zwei Knoten x, y ein Pfad von x nach y führt, kann mit einem einfachen
110
KAPITEL 4. CHURCHSCHE THESE
Algorithmus durchgeführt werden: wir berechnen die Menge M aller Knoten z, für
die ein Pfad von x nach z führt wie folgt. Initialwert: M := {x}. Rekursiv setzen wir
M := M ∪ E(M ), wobei E(M ) die Menge aller Endknoten w der Kanten (v, w) ∈ E
mit v ∈ M bezeichnet. Der Algorithmus endet, wenn M nicht mehr wächst, und
dann ist die Antwort genau dann JA, wenn y ∈ M ist.
Satz 2. Jede kontextsensitive Sprache ist rekursiv.
Beweis. Für jede kontextsensitive Grammatik G wollen wir einen Algorithmus finden, der für ein beliebiges Wort w entscheidet, ob w in L(G) liegt. Keine Ableitung
von w benutzt Wörter länger als n, der Länge von w. Es genügt also, einen Graphen
zu konstruieren, dessen Knoten alles Wörter über Σ ∪ V einer Länge ≤ n sind und
genau die Relation ⇒ zwischen diesen Wörtern formen. Dieser Graph lässt sich mit
einem einfachen brute-force“-Algorithmus konstruieren, der alle möglichen Pro”
duktionskombinationen durchgeht. Jetzt reicht es, einen Algorithmus zu benutzen,
der entscheidet, ob im Graph ein Pfad von S zu w führt.
Schlussbemerkung. Die folgende Hierarchie von Klassen von Sprachen, die ε nicht
enthalten, heißt Chomsky-Hierarchie:
regulär ⊂ kontextfrei ⊂ kontextsensitiv ⊂ rekursiv ⊂ rekursiv-aufzählbar.
Jede dieser Sprachklassen ist ein echter Teil der nächst höheren: die Sprache {0n 1n ;
n ≥ 1} ist kontextfrei, aber nicht regulär (siehe 1.8 und 2.1), die Sprache {an bn cn ;
n ≥ 0} ist kontextsensitiv, aber nicht kontextfrei. Im nächsten Kapitel zeigen wir
eine Sprache Lhalt , die rekursiv aufzählbar, aber nicht rekursiv ist. Es gibt auch
rekursive Sprachen, die nicht kontextsensitiv sind, das beweisen wir aber nicht.
4.5
Rekursive Funktionen
Berechenbare Funktionen können auch ganz anders modelliert werden, als mit Maschinen, die sie berechnen: wir gehen von sehr einfachen Funktionen (z.B. den konstanten Funktionen und der Nachfolgerfunktion succ) aus und wenden dann Rekursion und Verknüpfung an. Wir erhalten eine sehr reiche Kollektion von Funktionen,
die primitiv-rekursiv heißen. Es zeigt sich, dass jede primitiv-rekursive Funktion
Turing-berechenbar ist. Leider gilt die umgekehrte Aussage nicht: es gibt Turingberechenbare Funktionen, die nicht primitiv-rekursiv sind. Deshalb wird noch ein
Minimierungsoperator µ eingeführt. Funktionen, die sich mit primitiver Rekursion
und Minimierung ableiten lassen, heißen rekursiv (oder auch µ-rekursiv). Daraus ergibt sich eine neue Charakterisierung von Turing-berechenbaren Funktionen: es sind
genau die rekursiven Funktionen. Das ist eine weitere Bestätigung der Churchschen
These.
Wir wollen also erst aus einfachen Funktionen, die Basisfunktionen heißen, mit Hilfe
von Verknüpfung und Rekursion weitere Funktionen definieren. Die Fakultätsfunktion definiert man z.B. rekursiv mit Multiplikation, die Multiplikation wiederum
rekursiv mit Addition und die Addition rekursiv mit der Nachfolgerfunktion succ.
Hier endet aber diese Kette: succ ist eine der Basisfunktionen. Wir arbeiten hier
mit k-stelligen Funktionen natürlicher Zahlen, d.h. mit Funktionen
f : k → , wobei k = × · · · × (k-mal), für k = 1, 2, 3, . . . .
f hat also k Variablen im Bereich . Die konstante Funktion Ki mit
Ki (n) = i für alle n
gilt als 0-stellig, da sie von keiner Variablen abhängt. Nicht-konstante Funktionen
sind k-stelllig für k ≥ 1.
Besonders einfache k-stellige Funktionen sind die Projektionen π1k , . . . , πkk : die Projektion πik ordnet jedem k-Tupel sein i-tes Element zu,
4.5. REKURSIVE FUNKTIONEN
111
πik (n1 , n2 , . . . , nk ) = ni .
Für k = 2 gibt es z.B. zwei Projektionen
π12 (n, m) = n und π22 (n, m) = m.
Für k = 1 ist π11 (n) = n die Identitätsfunktion.
Definition. Die folgenden Funktionen heißen Basisfunktionen:
1. die Nachfolgerfunktion succ (mit succ(n) = n + 1)
2. die Nullfunktion K0 (mit dem einzigen Wert 0) und
3. die Projektionen πik für alle 1 ≤ i ≤ k, k = 1, 2, 3, . . . .
Aus den Basisfunktionen können weitere Funktionen mit Hilfe der Verknüpfung
definiert werden:
Beispiel 1. Konstante Funktionen. Die konstante Funktion K1 entspricht der Verknüpfung von K0 mit succ:
K1 = succ(K0 ).
Analog
K2 = succ(K1 ) = succ(succ(K0 ))
usw.
Beispiel 2. Die Funktion f (n) = n + 2 für alle n ∈
succ mit sich selbst:
f (n) = succ(succ(n)).
ist die Verknüpfung von
Beispiel 3. Die Funktion g(n, m) = m + 2 (für alle n, m ∈ ) ist eine Verknüpfung
der zweiten Projektion π22 (n, m) (die n wegfallen lässt) und der Funktion f aus
Beispiel 2:
g(n, m) = f (π22 (n, m)) = succ(succ(π22 (n, m)).
Bemerkung 1.
1. Im Allgemeinen definieren wir die Verknüpfung mehrstelliger
Funktionen wie üblich: falls
(k ≥ 1)
f: k →
eine k-stellige Funktion ist und
g1 , . . . , gk : m →
(m ≥ 0)
k m-stellige Funktionen sind, ist die Verknüpfung von f mit g1 , . . . , gk die
m-stellige Funktion
h: m → ,
die durch
h(n1 , . . . , nm ) = f (g1 (n1 , . . . , nm ), g2 (n1 , . . . , nm ), . . . , gk (n1 , . . . , nm ))
für alle (n1 , . . . , nm ) auf m definiert wird.
2. Neben der Verknüpfung wollen wir die sogenannte primitive Rekursion verwenden, um neue Funktionen zu erzeugen. Zum Beispiel lässt sich die Fakultätsfunktion f (n) = n! mit Hilfe primitiver Rekursion durch die Multiplikation h(n, m) = n ∗ m und den Initialwert 1 = f (0) wie folgt definieren:
f (0) = 1;
f (n + 1) = h(n, f (n)) = n ∗ f (n).
Die Definition einer einstelligen Funktion f (n) durch primitive Rekursion hat
zwei Bestandteile: eine Konstante k und eine zweistellige Funktion h(n, m).
Dann definiert man
f (0) = k
und
f (n + 1) = h(n, f (n)).
112
KAPITEL 4. CHURCHSCHE THESE
Allgemeiner:
Definition. Wir sagen, dass eine k-stellige Funktion f (n1 , . . . , nk ) durch primitive
Rekursion mit Hilfe einer (k − 1)-stelligen Funktion g und einer (k + 1)-stelligen
Funktion h definiert ist, falls für alle n1 , . . . , nk−1 , m ∈ gilt
f (n1 , . . . , nk−1 , 0) = g(n1 , . . . , nk−1 ) und
f (n1 , . . . , nk−1 , m + 1) = h(n1 , . . . , nk−1 , m, f (n1 , . . . , nk−1 , m)).
Beispiel 4. Addition. Es gilt
n+0=n
und
n + (m + 1) = succ(n + m).
Also ist add(n, m) = n + m durch primitive Rekursion mit
g(n) = n = π11 (n)
und
h(n, m, i) = succ i = succ(π33 (n, m, i))
definiert. In der Tat gilt
add(n, 0) = g(n)
add(n, m + 1) = h(n, m, add(n, m)).
Beispiel 5. Die Multiplikation ist die (primitiv-)rekursive Funktion:
n∗0 = 0
n ∗ (m + 1) = (n ∗ m) + m.
Genauer: für mal(n, m) = n ∗ m definieren wir
g(n) = K0
und
h(n, m, i) = add(m, i) = add(π23 (n, m, i), π33 (n, m, i)).
Dann gilt
mal(n, 0) = g(n)
mal(n, m + 1) = h(n, m, mal(n, m)).
Definition. Eine Funktion heißt primitiv-rekursiv , falls sie durch endlich viele
Anwendungen von Verknüpfung und primitiver Rekursion auf die Basisfunktionen
definiert werden kann.
Mit anderen Worten ist die kleinste Klasse von Funktionen, die alle Basisfunktionen enthält und unter Verknüpfung und primitiver Rekursion abgeschlossen ist, die
Klasse aller primitiv-rekursiver Funktionen.
Beispiele: Kn , f (n) = n + 2, g(n, m) = m + 2, add(n, m) und mal(n, m) sind
primitiv-rekursiv.
Beispiel 6. Die Fakultätsfunktion m! ist primitiv-rekursiv, da sie mit der folgenden
primitiven Rekursion definiert werden kann:
0! = 1
(m + 1)! = mal(m + 1, m!).
Hier ist also g = K1 und h(x, y) = mal(x + 1, y) = mal(succ(π12 (x, y), π22 (x, y)). Da
g und h beide primitiv-rekursiv sind, ist auch m! primitiv-rekursiv.
Beispiel 7. Die
Vorgängerfunktion in der Form
0
falls n = 0
f (n) =
n − 1 falls n > 0
ist primitiv-rekursiv:
f (0) = 0 = K0
f (n + 1) = n = π12 (n, f (n)).
Also g = K0 und h(n, m) = π12 (n, m).
4.5. REKURSIVE FUNKTIONEN
113
Beispiel 8. Diemodifizierte Subtraktion
n − m falls n ≥ m
n −̇ m =
0
falls n < m
ist primitiv-rekursiv:
n −̇ 0 = n
n −̇ (m + 1) = f (n −̇ m) für f aus Beispiel 7.
Hier gilt also g(n) = n und h(n, m, i) = f (π33 (n, m, i)) = f (i).
Bemerkung 2. Die Klasse aller primitiv-rekursiven Funktionen ist so mächtig,
dass es nicht einfach ist, ein Beispiel einer Funktion außerhalb dieser Klasse zu
finden (siehe Beispiel 9). Deswegen ist der folgende Satz eine neue Bestätigung der
Stärke von Turingmaschinen.
Satz 1. Jede primitiv-rekursive Funktion ist Turing-berechenbar.
Beweis. Es genügt, zu beweisen, dass gilt:
1. alle Basisfunktionen sind Turing-berechenbar,
2. die Verknüpfung Turing-berechenbarer Funktionen ist Turing-berechenbar,
und
3. die primitive Rekursion, die mit zwei Turing-berechenbaren Funktionen arbeitet, ergibt eine Turing-berechenbare Funktion.
Dann sind alle primitiv-rekursiven Funktionen Turing-berechenbar.
(1) ist trivial und (2) auch: Die Verknüpfung f (g(n)) wird z.B. von einer 2-BandTM berechnet, wobei Band 1 die Funktion g(n) berechnet und das Ergebnis als
Eingabe der Funktion f auf Band 2 kopiert.
Wir wollen also (3) beweisen, d.h., dass es für die Funktion f mit
f (n1 , . . . , nk , 0) = g(n1 , . . . , nk )
und
f (n1 , . . . , nk , m + 1) = h(n1 , . . . , nk , m, f (n1 , . . . , nk , m))
eine TM gibt, falls Mg und Mh zwei TM sind, die g und h berechnen.
Unsere TM hat fünf Bänder:
Band 1 (Eingabeband)
Band 2 (Schrittzähler)
n1 $ n2 $
...
$ nk
m
Band 3 (simuliert Mg )
FUNKTION g
Band 4 (simuliert Mh )
FUNKTION h
Band 5 (Ausgabeband)
ZWISCHENERGEBNIS
Die Berechnung von f erfolgt in Schritten Nr. m = 0, 1, 2, . . . , die auf Band 2 gezählt
werden und die wie folgt ablaufen:
Band 2 enthält 0, auf Band 3 wird n1 , . . . , nk−1 (von Band 1)
Schritt 0:
kopiert und g(n1 , . . . , nk−1 ) wird berechnet. Das Ergebnis wird
auf Band 5 geschrieben.
Schritt m + 1: Falls nk der Inhalt von Band 2 ist, hält die TM. (Band 5 enthält
dann das Ergebnis.) Falls nicht, wird auf Band 4 die Eingabe
n1 $ . . . $ n k $ m $ j
geschrieben. j = f (n1 , . . . , nk−1 , m) ist der Inhalt von Band 5,
m der von Band 2. Jetzt wird h(n1 , . . . , nk , m, j) berechnet und
das Ergebnis auf Band 5 geschrieben. Der Inhalt von Band 2
wird um eins erhöht.
114
KAPITEL 4. CHURCHSCHE THESE
Bemerkung 3. Nicht jede Turing-berechenbare Funktion ist primitiv-rekursiv. In
der Tat sind alle primitiv-rekursiven total (d.h. überall definiert), und es gibt partielle Turing-berechenbare Funktionen.
Aber auch alle totalen Turing-berechenbaren Funktionen sind leider nicht primitivrekursiv. Das können wir abstrakt wie folgt zeigen: alle primitiv-rekursiven Funktionen können wir systematisch aufzählen, z.B. setzen wir f0 = K0 , f1 = succ, f2 = π11 .
Mit den gegebenen Funktionen f0 , . . . , fi machen wir alle möglichen Verknüpfungen
und primitiven Rekursionen. Dabei entstehen fi+1 , . . . , fj , dann ist fj+1 die nächste
noch nicht eingenommene Projektion, usw. Diese Aufzählung kann bestimmt eine
TM durchführen. Dann ist die Funktion
P (n) = 1 + fn (n, n, . . . , n)
Turing-berechenbar. Aber P ist nicht primitiv-rekursiv: falls nämlich P = fn , haben
wir
P (n) = 1 + fn (n) 6= fn (n) – ein Widerspruch.
Es ist U. Ackermann 1928 gelungen, ein viel konkreteres Beispiel einer Funktion anzugeben, die nicht primitiv-rekursiv ist, sich aber mit einem einfachen Algorithmus
berechnen läßt. Die Funktion, die man heute Ackermann-Funktion nennt, ist eine
von R. Peter und R. M. Robinson später entdeckte Vereinfachung der ursprünglichen Idee:
Beispiel 9. Die Ackermann-Funktion A : 2 →
ist wie folgt definiert:
A(0, m) = m + 1
A(n + 1, 0) = A(n, 1) und
A(n + 1, m + 1) = A(n, A(n + 1, m)).
Es gilt also
A(0, 0) = 1,
A(0, 1) = 2,
A(1, 0) = A(0, 1) = 2,
A(0, 2) = 3,
A(1, 1) = A(0, A(1, 0)) = A(0, 2) = 3,
A(2, 0) = A(1, 1) = 3,
usw. Wir erhalten einen Algorithmus, um jeden Wert A(n, m) zu berechnen: alle
möglichen Paare (n, m) werden so aufgezählt, dass der Wert A(n, m) direkt aus den
vorigen Werten berechnet wird:
(0, 0), (0, 1), (1, 0), (0, 2), (1, 1), (2, 0), . . . , Das können wir durch eine TM realisieren, und wir sehen also, dass die Ackermann-Funktion TM-berechenbar ist.
Trotzdem ist sie nicht primitiv-rekursiv! Man kann nämlich beweisen, dass sie
schneller wächst, als jede primitiv-rekursive Funktion.
Es gilt z.B. folgendes, wie sich leicht durch Induktion über m beweisen lässt:
A(1, m) = m + 2
A(2, m) = 2m + 3
A(3, m) = 2m+3 − 3
..
2
..
2
A(4, m) = 22 − 3, wobei 22 m + 2 Exponentiationen hat.
Zum Beispiel
16
A(4, 1) = 216 − 3 und A(4, 2) = 22 − 3 > 101000 .
Bemerkung 4. Wir wollen jetzt die Klasse aller primitiv-rekursiven Funktionen
durch eine neue Operation ergänzen, um alle berechenbaren Funktionen repräsentieren zu können. Das wird der Minimierungsoperator µ sein, der z.B. jeder 2-stelligen
Funktion f (n, m) die 1-stellige Funktion
µf (n) = min{m; f (n, m) = 0}
zuordnet. Hier müssen wir aber aufpassen: µf ist nicht immer definiert, da es für
eine Zahl n geschehen kann, dass f (n, m) 6= 0 für alle m ∈ . Deshalb arbeiten
4.5. REKURSIVE FUNKTIONEN
115
wir jetzt mit partiellen Funktionen (das ist nicht überraschend, denn die Turingberechenbaren Funktionen sind im allgemeinen auch partiell).
Definition. Für jede partielle (k +1)-stellige Funktion f (n1 , . . . , nk , nk+1 ) bezeichnen wir mit µf die folgende partielle k-stellige Funktion:
µf (n1 , . . . , nk ) ist die kleinste Zahl i mit f (n1 , . . . , nk , i) = 0;
falls keine solche Zahl i existiert, ist µf (n1 , . . . , nk ) undefiniert.
Eine Funktion heißt rekursiv (oder µ-rekursiv), wenn sie durch die Basisfunktionen
und endlich viele Anwendungen von
1. Verknüpfung,
2. primitiver Rekursion und
3. Minimierung µ
definiert werden kann.
Beispiel 10. Diepartielle Vorgängerfunktion
n − 1 falls n > 0
pred(n) =
undef. für n = 0
ist rekursiv, denn für die Funktion
f (n, m) = (succ m) −̇ n
(siehe Beispiel 8) gilt
pred(n) = µ((succ m) −̇ n).
Beispiel 11. Die Subtraktion
n − m falls n ≥ m
sub(n, m) =
undef. falls n < m
ist rekursiv: wir haben
sub(n, 0) = n
sub(n, m + 1) = pred(sub(n, m)),
also ist sub primitiv-rekursiv durch g(n) = π11 (n) und h(n, m, i) = pred(i) =
pred(π33 (n, m, i)) definiert (g und h sind rekursiv).
Beispiel 12. Die
Division
k
falls n = mk
n:m=
undef. falls n nicht durch m teilbar ist
ist rekursiv. Der erste Versuch wäre, n : m als µ(n − m ∗ k) zu definieren, denn
n − m ∗ k = 0 genau dann, wenn k = n : m. Das ergibt leider 0 : 0 = 0. Deswegen
müssen wir n − m ∗ k durch n − (succ(pred(m)) ∗ k ersetzen:
n : m = µf (n, m)
für
f (n, m, k) = n − succ(pred(m)) ∗ k = sub(n, mal(succ(pred(m))), k).
Jetzt gilt: die Division durch m = 0 ist undefiniert, für m > 0 ist f (n, m, k) =
n − m ∗ k und µf (n, m) = n : m genau dann, wenn n : m definiert ist.
Satz 2. Jede rekursive Funktion ist Turing-berechenbar.
Beweis. Es genügt zu den Punkten 1. - 3. aus Satz 1 einen vierten Punkt hinzuzufügen:
4. Falls f Turing-berechenbar ist, so ist es auch µf .
116
KAPITEL 4. CHURCHSCHE THESE
Sei M eine TM, die f berechnet. Wir konstruieren eine 3-Band TM für µf wie folgt:
n1 $ n2 $ . . . $ nk
Band 1 (Eingabeband)
Band 2 (Schrittzähler)
i
Band 3 (simuliert M )
FUNKTION f
Am Anfang wird i = 0 auf Band 2 geschrieben, und dann wird auf Band 3 immer
f (n1 , . . . , nk , i) berechnet. Falls das Ergebnis 0 ist, hält die TM, und Band 2 enthält
die Ausgabe. Falls das Ergebnis nicht 0 ist, wird Band 2 um 1 erhöht (i := i + 1),
und f (n1 , . . . , nk , i) wird erneut berechnet, usw.
Satz 3. (Ohne Beweis) Jede Turing-berechenbare Funktion ist rekursiv.
Schlussbemerkung: Wir sehen, dass viele Modelle dieselbe Klasse von entscheidbaren
Problemen beschreiben:
• Turingmaschinen (und alle ihre Modifikationen),
• RAMs,
• Grammatiken,
• rekursive Funktionen.
Das ist eine Untermauerung der Churchschen These.
Überlegen Sie sich, warum die Bemerkung nach Satz 1 nicht auf µ-rekursive Funktionen verallgemeinert werden kann (was Satz 3 widerlegen würde!). Die Regel
P (n) = 1+fn(n), ergibt nämlich keinen Algorithmus, der die Funktion P berechnet,
da fn partielle Funktionen sind!
Kapitel 5
Unentscheidbare Probleme
Es gibt wichtige praktische Fragen, die sich von keinem Algorithmus lösen lassen.
Beispiel: die Entscheidung, ob ein gegebenes Programm (sagen wir in PASCAL)
auf eine gegebene Eingabedatei hält. Es wäre von größter praktischer Bedeutung,
einen Algorithmus zur Verfügung zu haben, der als Eingabe ein Paar (P, D) hat,
wobei P ein PASCAL-Programmcode und D eine Datei für P ist, und das die
richtige Ausgabe hält“ oder hält nicht“ ergibt. Solch ein Algorithmus existiert aber
”
”
nicht. Das beweisen wir für eine Variante, die (statt mit PASCAL-Programmen) mit
Turingmaschinen arbeitet. Außerdem zeigen wir weitere Beispiele unentscheidbarer
Probleme.
Der formale Beweis, dass es vernünftige“ und wichtige Fragen gibt, die einfach kein
”
Algorithmus lösen kann, ist eines der wichtigsten Ergebnisse in diesem Skript, denn
daraus folgt, dass man bei dem Versuch, eine Aufgabe zu lösen, immer darauf achten
muss, dass die Aufgabe keine Variante eines unlösbaren Problems ist. Wir beginnen
aber mit einem positiven Ergebnis: es gibt eine universelle Turingmaschine, also
eine, die (wie moderne Rechner) programmiert werden kann.
5.1
Universelle Turingmaschine
Wir konstruieren jetzt eine universelle (oder programmierbare“) TM, die bei Ein”
gaben der Form
(c, w)
c – Algorithmus, w – Datei
die Datei w entsprechend des Algorithmus c berechnet. Da wir Algorithmen als
Turingmaschinen interpretieren, können wir genauer sagen: eine universelle Turingmaschine Mu erhält als Eingabe ein Wort
c(M )w,
wobei c(M ) eine passende Codierung der (beliebigen) Turingmaschine M und w
ein (beliebiges) Eingabewort für M ist. Dann berechnet Mu die Eingabe und liefert
genau dasselbe Ergebnis, das die Maschine M auf Eingabe w liefert. Das können
wir entweder in der Akzeptor-Variante interpretieren, also Mu hält genau dann
auf c(M )w, wenn M auf w hält, und dann akzeptiert Mu genau dann, wenn M
akzeptiert, oder in der Rechner-Variante, also Mu führt für c(M )w zu der gleichen
Ausgabe wie M für w. Es zeigt sich, dass die Maschine Mu , die wir jetzt beschreiben,
beide Rollen erfüllt.
117
118
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
Bemerkung 1.
1. Jede TM kann durch eine TM mit dem Bandalphabet Σ =
{0, 1} simuliert werden. Wir codieren die ursprünglichen Eingabesymbole si
und das ursprüngliche Blanksymbol wie folgt:
Symbol #
s1
s2
...
sk
Code
01 011 013 . . . 01k+1
Die neue Maschine hat also nur an den noch nicht beschrifteten Feldern Blanksymbole. Die einzelnen Übergänge werden wie folgt simuliert:
(a) ein Schritt nach rechts wird durch eine Bewegung des Kopfes unter die
nächste 0 nach rechts simuliert; analog für links
(b) Überschreibung von si und sj wird dadurch simuliert, dass 01j+1 statt
01i+1 geschrieben wird. Dazu müssen, falls z.B. i = 1 und j = 2, alle
Symbole 0, 1 rechts vom Lesekopf ein Feld nach rechts geschoben werden
(und vorher muss die momentane Kopfposition gespeichert werden – z.B.
dadurch, dass die momentan gelesene 0 gelöscht wird).
2. Eigentlich kann jede TM durch eine TM mit Σ = {|} simuliert werden. Die
Idee ist gleich, aber die Details sind aufwendiger.
Wir beschränken uns auf TM mit dem binären Bandalphabet Σ = {0, 1}. Also
hat die universelle Turingmaschine Mu sowie alle simulierten Maschinen M dieses
Eingabealphabet.
Codierung c(M ) von Turingmaschinen M : Für jede TM
M = (Q, {0, 1}, δ, q0, q1 )
deren Zustände
Q = {q0 , q1 , . . . , qn−1 }
so durchnummeriert sind, dass q0 der Initialzustand und q1 der Finalzustand ist,
definieren wir ein Codewort
c(M ) ∈ {0, 1}∗
wie folgt. Wir benutzen 0i um die Zahl i zu codieren und 1 als Trennungssymbol. Das
Wort c(M ) hat die folgende Form: Am Anfang steht 111 als Trennungssymbol, dann
folgt 0n , das die Anzahl n aller Zustände bezeichnet. Dann werden die einzelnen t
Übergangsregeln aus R durch binäre Wörter w1 , . . . , wt codiert, wie später erklärt
wird, und durch eine 1 voneinander getrennt. Am Ende schreiben wir wieder 111.
Der Code hat also die Form
c(M ) = 1110n1w1 1w2 1 . . . 1wt 111.
Um die Übergangsregeln zu codieren, schreiben wir für Zustände 10i+1 statt qi und
codieren die Symbole L, R, #, 0, 1 wie folgt
Symbol
Code
L
10
R
100
#
10000
0
104
1
105
Die Übergangsregel
erhält also den Code
(qi , 0) → (qj , L)
w = 10i+1 104 10j+1 10,
die Übergangsregel
den Code
(qi , #) → (qj , 0)
w = 10i+1 103 10j+1 104
usw.
5.1. UNIVERSELLE TURINGMASCHINE
119
Beispiel 1. Wir codieren die Maschine M1 mit Zuständen q0 , q1 und Übergangsregeln
(q0 , 1) → (q1 , R)
(q1 , #) → (q1 , 1)
wie folgt:
c(M1 ) = 111001w11w2 111
wobei w1 der Code für (q0 , 1) → (q1 , R) ist:
w1 = 10105100100
und w2 der Code für (q1 , #) → (q1 , 1) ist:
w2 = 100103100105.
Insgesamt ergibt sich
c(M1 ) = 111001101051001001100103100105111.
Wir bemerken, dass einzelne Übergangsregeln voneinander durch 11 getrennt werden. Jede Turingmaschine wird durch ihren Code vollständig beschrieben.
Beispiel 2. Falls eine Turingmaschine den Code
c(M2 ) = 1110001101051010311010310101100104103 100111
hat, muss es die Maschine
M2 = ({q0 , q1 , q2 }, {0, 1}, δ, q0, q1 )
mit den Übergangsregeln
(q0 , 1) → (q0 , #)
(q0 , #) → (q0 , L)
(q1 , 0) → (q2 , R)
sein.
Bemerkung 2. Erinnern wir uns an die in Kapitel 3 eingeführte Sprache
Lcode = { c(M ) | M ist eine TM, die c(M ) nicht akzeptiert } .
Zum Beispiel das Wort c(M1 ) in Beispiel 1 ist ein Codewort einer TM. Akzeptiert
diese TM das Wort c(M1 ) ? Wir haben Konfigurationen
(q0 , 111 . . . 111) ` (q1 , 111 . . . 111)
| {z }
| {z }
c(M1 )
c(M1 )
und da kein Übergang (q1 , 1) →? definiert ist, hält M1 im Finalzustand q1 . Das
Wort c(M1 ) wird also akzeptiert, das heißt,
c(M1 ) ∈
/ Lcode.
In Beispiel 2 wird c(M2 ) von M2 wie folgt berechnet: erst löscht der Kopf das erste
Symbol 1 und dann bewegt er sich immer nach links. Also hält M2 nicht, deswegen
akzeptiert sie das Wort c(M2 ) nicht, woraus folgt
c(M2 ) ∈ Lcode.
120
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
Wie in Abschnitt 3.3 bewiesen, ist die Sprache Lcode nicht rekursiv-aufzählbar. Das
bedeutet, dass kein Algorithmus entscheiden kann, ob eine beliebige TM ihr eigenes
Wort akzeptiert oder nicht.
In konkreten Fällen ist diese Entscheidung trotzdem möglich. Die Unentscheidbarkeit von Lcode (oder eines beliebigen anderen Problems) bezieht sich immer nur auf
die Klasse aller möglichen Eingaben, nie auf einen Einzelfall.
Universelle Turingmaschine Mu Wir konstruieren jetzt eine universelle Turingmaschine Mu . Also reagiert sie auf die Eingabe c(M )w, wobei M eine TM und w
ein Wort über {0, 1} ist, wie folgt:
1. Mu hält genau dann, wenn M auf das Wort w hält,
2. Mu akzeptiert genau dann, wenn M das Wort w akzeptiert
3. falls M gehalten hat, hat Mu auf Band 1 dasselbe Ausgabewort wie M .
Die Maschine Mu wird als eine 3-Band TM beschrieben, aber wir wissen, dass das
unwichtig ist, weil wir eine 1-Band TM konstruieren können, die Mu simuliert.
BAND 1
BAND 2
# 1 1 1
|
...
{z
c(M )
1 1 1 1 0 1 ...
} |
{z
w
1 # #
}
...
Enthält c(M )
0 0 ...
|
{z
BAND 3
i+1
0
}
Zustand qi
Band 1 enthält am Anfang die Eingabe c(M )w und die Bänder 2 und 3 sind, wie
üblich, leer. Zur Vorbereitung auf die Simulation führt Mu die folgenden Schritte
aus:
1. c(M ) wird von Band 1 auf Band 2 kopiert und auf Band 1 gelöscht,
2. der Kopf von Band 1 wird auf das erste Symbol von w gestellt
3. Auf Band 3 wird 0 geschrieben (Zustand q0 ), und der Kopf wird auf die 0
gestellt.
BAND 1
# 1 0 1 ...
|
{z
1 # #
}
...
{z
1 1 1
}
⇑
BAND 2
c(M )
1 1 1
|
⇑
BAND 3
# 0 #
⇑
c(M )
...
5.1. UNIVERSELLE TURINGMASCHINE
121
Dann wird M in rekursiven Schritten wie folgt simuliert (so dass das Band von M
identisch mit dem Band 1 von Mu ist und der Zustand von M gleich qi ist, wobei
0i+1 auf Band 3 von Mu steht):
Simulation von M : Der Kopf von Band 1 liest s = #, 0 oder 1, also ein Symbol,
das den Code 10p hat, wobei p = 3 (#), p = 4 (0) oder p = 5 (1) gilt.
Jetzt beginnt der Kopf auf Band 2 eine systematische Suche nach der Kombination
10i+1 10p ,
wobei i + 1 die Zahl der 0’en auf Band 3 ist. Falls die Kombination 10i+1 10p nicht
gefunden wurde, hat die Maschine M keine Übergangsregel (qi , s) →?, deshalb hält
M . Also hält auch Mu (wenn sie die rechte Gruppe 111 auf Band 2 erreicht hat,
ohne die gesuchte Kombination zu finden). Mu akzeptiert genau dann, wenn Band
3 den Inhalt 00 hat, d.h., genau dann, wenn M im Finalzustand q1 gehalten hat.
Falls die Kombination 10i+1 10p gefunden wurde, liest der Kopf auf Band 2 weiter
bis zur nächsten Gruppe 11. Wir haben jetzt das Wort
10i+1 10p 10j+1 10r 11 . . .
auf Band 2 und das bedeutet, dass eine Übergangsregel von M die Form
(qi , s) → (qj , s0 )
s0 hat den Code 10r (r = 1, . . . , 5)
hat. Die Maschine Mu ändert den Bandinhalt von Band 3 zu 0j+1 und bewegt den
Kopf auf Band 1 nach links oder rechts, falls r = 1 oder 2 ist, oder Mu überschreibt
s mit
#(falls r = 3), 0 (r = 4) oder 1 (r = 5).
Jetzt ist Mu für den nächsten Simulationsschritt vorbereitet.
Bemerkung 3.
1. Die obige Codierung kann auch auf nichtdeterministische Turingmaschinen mit dem Bandalphabet {0, 1} angewendet werden.
2. Es ist einfach zu entscheiden, ob ein binäres Wort v der Code einer (deterministischen oder nichtdeterministischen) TM ist. Die Codierungen sind nämlich
alle von der Form
(1)
v = 1110n1w1 1w2 1 . . . 1wt 111,
wobei w1 , . . . , wt verschiedene Wörter der Form
(2) 10i+1 10p 10j+1 10r mit i, j = 0, . . . , n − 1, p = 3, 4, 5 und r = 1, 2, 3, 4, 5
sind. Umgekehrt ist jedes Wort v, das (1) und (2) erfüllt, der Code einer TM.
Mit anderen Worten ist die Sprache aller Codierungen von allen nichtdeterministischen TM rekursiv. Auch die Sprache aller Codierungen aller deterministischen TM
ist rekursiv: hier muss der Algorithmus nur noch für alle Paare k, k 0 = 1, . . . , t von
Indizes mit
wk = 10i+1 10p 10j+1 10r
und
wk0 = 10i + 110p 10j
überprüfen, ob j = j 0 und r = r0 .
0
+1
10r
0
122
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
5.2
Das Halteproblem
Gibt es einen Algorithmus, der für jedes Paar
(Algorithmus c, Datei w)
entscheidet, ob c auf die Datei w hält? Aus Abschnitt 5.1 wissen wir, dass es einen
Algorithmus gibt, der auf die Eingabe (c, w) das Ergebnis von c auf die Datei w
berechnet - das macht die universale Turingmaschine! Dennoch ist die Antwort auf
die obige Frage, die als Halteproblem bekannt ist, negativ. Auch dann, wenn wir uns
nur auf die Algorithmen beschränken, die von TM mit dem Bandalphabet {0, 1}
repräsentiert werden, ist die Antwort negativ. Für diese Maschinen M haben wir
die Codierung c(M ) aus Abschnitt 5.1, und wir können das Halteproblem präziser
formulieren: ist die Sprache
Lhalt = { v | v = c(M )w für ein binäres Wort w und eine Turingmaschine M ,
die auf Eingabe w hält }
rekursiv?
Wir beweisen, dass Lhalt nicht rekursiv (also das Halteproblem nicht entscheidbar)
ist, sie aber rekursiv-aufzählbar ist. Daraus folgt, dass das Komplement Lhalt nicht
rekursiv-aufzählbar ist. Das bedeutet, dass das Problem, ob ein Algorithmus c auf
die Datei w nicht hält, nicht einmal mehr semi-entscheidbar ist.
Bemerken wir, dass in jedem Wort v = c(M )w der Code c(M ) eindeutig bestimmt
ist (aufgrund der Trenngruppen 111 am Anfang und Ende von c(M )) und also auch
w eindeutig bestimmt ist. Es gibt einen Algorithmus, der überprüft, ob u diese Form
hat – siehe Bemerkung in Abschnitt 5.1.
Bemerkung 1. Viele (auch ungelöste!) mathematische Probleme kann man umformulieren zu Fragen, ob eine leicht konstruierbare TM auf eine Eingabe hält.
Beispiel 1. Beispiel einer TM mit sehr interessantem Halteproblem. Es ist ziemlich
trivial, eine 5-Band-TM zu konstruieren, die auf Band 2 systematisch alle Zahlen
n = 3, 4, 5, . . . schreibt und für jede Zahl n auf die Bänder 3 - 5 systematisch alle
Zahlen a, b, c ≥ 2 schreibt und dann auf Band 1 die Zahl
an + b n − c n
berechnet. Falls diese Zahl 0 ist, hält die TM. Falls nicht, berechnet die TM den
nächsten Quadrupel (n, a, b, c). Die Entscheidung, ob diese Turingmaschine M auf
die leere Eingabe hält, das heißt, ob
c(M ) ∈ Lhalt
gilt, ist bestimmt höchst kompliziert: dies ist äquivalent zum Beweis des berühmten
Satzes von Fermat!
Satz 1. Die Sprache Lhalt ist rekursiv-aufzählbar.
Beweis. Die folgende Turingmaschine akzeptiert Lhalt :
TURINGMASCHINE M0
v
EINGABE / Hat v die Form
v = c(M )w für
eine TM M ?
JA
/ Hält Mu auf
Eingabe v?
NEIN
NEIN
v nicht akzeptiert
v nicht akzeptiert
JA
/ v akzeptiert
5.2. DAS HALTEPROBLEM
123
Also überprüft M0 , ob die Eingabe die Form c(M )w hat (siehe Bemerkung in 5.1),
und falls das der Fall ist, simuliert sie die universale Turingmaschine Mu . Die Eingabe v wird genau dann von M0 akzeptiert, wenn v = c(M )w und Mu (akzeptierend
oder nicht akzeptierend) auf die Eingabe v hält. Äquivalent dazu ist: genau dann,
wenn M auf die Eingabe w hält. Kürzer: L(M0 ) = Lhalt .
Satz 2 (Unentscheidbarkeit des Halteproblems). Die Sprache Lhalt ist nicht rekursiv.
Beweis. Die Annahme, dass Lhalt rekursiv ist, führt zu einem Widerspruch: es
folgt, dass die Sprache
Lcode = {w; w = c(M ) für eine Turingmaschine M mit w ∈
/ L(M )}
rekursiv-aufzählbar ist. Das ist aber falsch, siehe Beispiel 2 in Kapitel 3.3.
Sei Mhalt eine TM, die Lhalt akzeptiert und auf jede Eingabe hält. Dann lässt sich
in der Tat eine TM konstruieren, die die Sprache Lcode akzeptiert:
TURINGMASCHINE Mcode
w
EINGABE / Hat w die Form
w = c(M ) für
eine TM M ?
NEIN
JA / Akzeptiert
Mhalt Eingabe
ww?
JA / Akzeptiert
Mu Eingabe
ww?
NEIN
w nicht akzeptiert
JA / w nicht
akzeptiert
NEIN
w akzeptiert
w akzeptiert
Das heißt, dass die Turingmaschine Mcode eine Eingabe w wie folgt berechnet:
1. Mcode überprüft, ob w = c(M ) für eine Turingmaschine M gilt (siehe Bemerkung in 5.1).
2. Falls ja, wiederholt Mcode die Eingabe und schreibt also
ww = c(M )w
auf das Band.
3. Jetzt simuliert Mcode die Maschine Mhalt bis sie hält.
(a) Falls Mhalt die Eingabe ww nicht akzeptiert, hält Mcode und akzeptiert
w. In diesem Fall hält nämlich die Maschine M nicht auf die Eingabe w
(denn c(M )w ∈
/ Lhalt ); also wird w von M nicht akzeptiert – es folgt
w ∈ Lcode.
(b) Falls Mhalt akzeptiert, simuliert Mcode die universale TM auf dieselbe
Eingabe ww. Da c(M )w ∈ Lhalt gilt, hält M auf die Eingabe w, also hält
die universale TM auf die Eingabe c(M )w. Mcode akzeptiert genau dann,
wenn Mu nicht akzeptiert.
Die Turingmaschine Mcode hält auf jede Eingabe: der erste Schritt hält (denn die
Sprache aller Codes ist rekursiv, siehe 5.1), der zweite hält nach unserer Voraussetzung von Mhalt , und der letzte hält, denn Mu erhält nur solche Eingaben ww, die
von Mhalt akzeptiert werden, das heißt Eingaben c(M )w mit w = c(M ), so dass M
auf w hält (oder äquivalent: Mu hält auf die Eingabe c(M )w = ww).
Welche Eingaben w akzeptiert Mcode? Genau die der Form w = c(M ), wobei entweder
124
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
• M auf w nicht hält, d.h., Mhalt akzeptiert die Eingabe c(M )w nicht, oder
• M auf w hält und nicht akzeptiert, d.h., Mu akzeptiert die Eingabe c(M )w
nicht.
Also gilt: w ∈ L(Mcode) genau dann, wenn w = c(M ) und w ∈
/ L(M ); oder kürzer:
L(Mcode) = Lcode, ein Widerspruch.
Korollar 1. Das Problem, ob eine TM nicht hält, ist nicht semi-entscheidbar. D.h.,
die Sprache Lhalt ist nicht rekursiv-aufzählbar.
Beweis. Das folgt aus Satz ??? : falls Lhalt und Lhalt rekursiv-aufzählbar wären,
wäre Lhalt rekursiv.
5.3
Weitere unentscheidbare Probleme
Wir zeigen jetzt weitere Probleme, die nicht entscheidbar sind. Wir benutzen ständig
die Codierung c(M ) von (deterministischen und nichtdeterministischen) Turingmaschinen M aus Kapitel 5.1. Auch alle Modifikationen von Turingmaschinen mit
Bandalphabet {0, 1} aus Abschnitt 3.2 sind damit codiert. Falls M z.B. eine nichtdeterministische k-Band TM ist, bezeichnen wir mit c(M ) den Code einer 1-BandTM, die M simuliert. Auch für jeden Kellerautomaten erhalten wir eine Codierung,
in dem Sinne, dass wir ihn mit einer nichtdeterministischen 2-Band TM simulieren
(Beispiel 3 in Kapitel 3.4) und den Code der TM verwenden.
Wir werden eine TM, die auf jede Eingabe hält und die Sprache L akzeptiert, kurz
Algorithmus für L nennen.
5.3.1
Das Akzeptanzproblem
Erinnern wir uns an den CYK-Algorithmus (Kapitel 2.8), der für jede kontextfreie Grammatik G mit Terminalsymbolen aus {0, 1} und jedes Wort w über {0, 1}
entscheidet, ob w in L(G) liegt. Daraus folgt, dass das Akzeptanzproblem für Kellerautomaten entscheidbar ist; mit anderen Worten haben wir einen Algorithmus,
der für jeden Kellerautomaten M und jedes Wort w entscheidet, ob M das Wort w
akzeptiert. Oder kürzer: die Sprache
L(K)
acc = {u; u = c(M )w für einen Kellerautomaten M und ein Wort w aus L(M )}
(K)
ist rekursiv. In der Tat kann ein Algorithmus, der Lacc entscheidet, wie folgt konstruiert werden:
1. Wir überprüfen, ob die Eingabe u die Form u = c(M )w, wobei M ein Kellerautomat ist, hat – vergleiche die Bemerkung in 5.1.
2. Für den gegebenen Kellerautomaten M konstruieren wir eine kontextfreie
Grammatik G(M ), die die Sprache L(M ) erzeugt.
3. Der CYK-Algorithmus wird auf G(M ) und w angewendet.
(K)
Falls also M0 eine TM ist, die diesen Algorithmus repräsentiert, gilt Lacc = L(M0 ).
Im Kontrast hierzu zeigen wir jetzt, dass das Akzeptanzproblem für Turingmaschinen, also die Frage, ob eine gegebene Turingmaschine ein gegebenes Eingabewort
akzeptiert, unentscheidbar ist. Kürzer: die Sprache
Lacc = {u; u = c(M )w für eine Turingmaschine M und ein Wort w aus L(M )}
5.3. WEITERE UNENTSCHEIDBARE PROBLEME
125
ist nicht rekursiv.
Wir merken erst an, dass es zu jeder Turingmaschine M eine Turingmaschine M
gibt, die sich von M nur darin unterscheidet, dass finale und nichtfinale Zustände
ausgetauscht werden. (Genauer: wenn wir in M die finalen und nichtfinalen Zustände
austauschen, erhalten wir eine TM mit mehreren finalen Zuständen, und M ist eine TM, die M simuliert, siehe Abschnitt 3.2.1) Der Übergang von M zu M lässt
sich offensichtlich durch einen (kleinen) Algorithmus implementieren. Das bedeutet,
dass es eine Turingmaschine M̂ gibt, die auf die Eingabe c(M ) die Ausgabe c(M )
berechnet. Es gilt
w ∈ L(M) genau dann, wenn M auf die Eingabe w hält und nicht akzeptiert.
Wir beweisen jetzt, dass die Annahme, dass Lacc rekursiv ist, zu einem Widerspruch
führt: wenn Lacc rekursiv wäre, würde folgen, dass Lhalt rekursiv ist. In der Tat:
falls Lacc von einer Turingmaschine Macc akzeptiert wird, die auf jede Eingabe hält,
können wir die folgende Turingmaschine Mhalt konstruieren, die Lhalt akzeptiert und
auf jede Eingabe hält:
TURINGMASCHINE Mhalt
u
u nicht akzeptiert
O
EINGABE
Hat u die Form
u = c(M )w für
eine TM M ?
NEIN
NEIN
Akzeptiert
JA /
NEIN/ c(M ) wird
Macc Eingabe
von M̂
c(M )w?
berechnet
Akzeptiert
/ Macc Eingabe
JA
u nicht akzeptiert
c(M )w?
JA
u akzeptiert
u akzeptiert
Diese TM akzeptiert genau die Eingaben u = c(M )w, für die gilt, dass
• entweder M akzeptiert w (d.h., Macc akzeptiert c(M )w), oder
• M akzeptiert w (d.h., Macc akzeptiert c(M )w).
Das heißt, genau die Eingaben c(M )w, für die M auf die Eingabe w hält. Kürzer:
L(Mhalt ) = Lhalt . Darüber hinaus hält Mhalt auf jede Eingabe – ein Widerspruch
zu Satz 2 aus Kapitel 5.2.
5.3.2
Akzeptanz des leeren Wortes
Eine noch einfachere Frage ist, ob eine TM die leere Eingabe akzeptiert. Auch diese
Frage ist aber unentscheidbar, d.h., die Sprache
Lε = {c(M ); M ist eine TM die ε akzeptiert}
ist nicht rekursiv.
Wir merken erst an, dass es für jede Turingmaschine M und jedes Wort w eine
Turingmaschine Mw gibt, die das leere Wort genauso berechnet wie M das Wort
w. Mw schreibt erst das Wort w = s1 . . . sn von links nach rechts auf ihr Band
(mit Hilfe von n neuen Zuständen q1 , . . . , qn , wobei qn der Initialzustand von Mw
ist) und dann geht sie in den Initialzustand q0 der Maschine M über und beginnt
126
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
die Berechnung wie M . Das bedeutet, dass zu den Übergangsregeln von M die
folgenden Regeln hinzugefügt werden:
(qn , #) → (qn , sn )
(qn , sn ) → (qn−1 , L)
(qn−1 , #) → (qn−1 , sn−1 )
(qn−1 , sn−1 ) → (qn−2 , L)
..
.
(q1 , #) → (q1 , s1 )
(q1 , s1 ) → (q0 , s1 )
(Jetzt steht der Kopf im Zustand q0 am Anfang des Wortes w = s1 . . . sn .)
Offensichtlich kann der Übergang von (M, w) zu Mw durch einen Algorithmus implementiert werden, d.h., es gibt eine Turingmaschine M̂, die auf die Eingabe c(M )w
die Ausgabe c(Mw ) berechnet.
Die Annahme, dass Lε rekursiv ist, führt zu einem Widerspruch: daraus würde
folgen, dass Lacc rekursiv ist. In der Tat haben wir, falls Mε ein Algorithmus für Lε
ist, den folgenden Algorithmus für Lacc :
TURINGMASCHINE Macc
u
EINGABE / Hat u die Form
u = c(M )w für
eine TM M ?
JA /
c(Mw ) wird
von M̂
berechnet.
NEIN
Akzeptiert
/ Mε Eingabe NEIN/ u nicht
c(Mw )?
akzeptiert
JA
u nicht akzeptiert
u akzeptiert
Es ist klar, dass Mε die Eingabe u = c(M )w genau dann akzeptiert, wenn Mw
das leere Wort akzeptiert und das geschieht genau dann, wenn M das Wort w
akzeptiert. Das heißt, genau dann, wenn die Eingabe u = c(M )w in Lacc liegt.
Kürzer: L(Macc ) = Lacc . Außerdem hält Macc auf jede Eingabe – ein Widerspruch
zu 5.3.1
5.3.3
Ist eine TM ein Algorithmus?
Auch diese Frage, d.h., das Problem, ob eine gegebene TM auf jede Eingabe hält,
ist unentscheidbar. Mit anderen Worten ist die Sprache
Lalg = {c(M ); M ist eine TM, die auf jede Eingabe hält}
nicht rekursiv.
Wir merken erst an, dass es für jede Turingmaschine M eine Turingmaschine M 0
gibt, die jede Eingabe so berechnet wie M die Eingabe ε: M 0 löscht erst das Band
und dann simuliert sie M . Offensichtlich kann der Übergang von M zu M 0 durch
einen Algorithmus durchgeführt werden.
Die Annahme, dass Lalg rekursiv ist, führt zu einem Widerspruch: daraus würde
folgen, dass Lε rekursiv ist. In der Tat haben wir den folgenden Algorithmus für
Lε , falls Malg ein Algorithmus für die Sprache Lalg ist:
5.3. WEITERE UNENTSCHEIDBARE PROBLEME
127
TURINGMASCHINE Mε
u
u akzeptiert
O
EINGABE
JA
Hat u die Form
u = c(M ) für
eine TM M ?
JA /
c(M 0 ) wird
von M̂
berechnet.
NEIN
Akzeptiert
/ Malg Eingabe
JA
c(M 0 )?
u nicht akzeptiert
c(M 0 )?
NEIN
NEIN
Akzeptiert Mu
/ die Eingabe
u nicht akzeptiert
u nicht akzeptiert
Die Maschine Mε hält auf jede Eingabe u: nur im letzten Schritt müssen wir aufpassen, ob Mu auf die Eingabe c(M 0 ) hält (äquivalent: ob M 0 auf die Eingabe ε
hält) – das folgt daraus, dass Malg die Eingabe c(M 0 ) akzeptiert. Und eine Eingabe
u wird genau dann von Mε akzeptiert, wenn u = c(M ) für eine Turingmaschine,
für die gilt: M 0 hält auf jede Eingabe und M 0 akzeptiert ε. Das ist äquivalent dazu,
dass M auf ε hält und akzeptiert. Also
u ∈ L(Mε ) genau dann, wenn u = c(M ) ∈ Lε .
Das steht im Widerspruch zu 5.3.2
5.3.4
Satz von Rice
Ist es entscheidbar, ob für eine Turingmaschine M die akzeptierte Sprache L(M )
• regulär,
• kontextfrei, oder
• nichtleer
ist?
Alle drei Antworten sind negativ. In der Tat gilt ein überraschend allgemeiner Satz
in diesem Gebiet. Sei S eine beliebige Eigenschaft formaler Sprachen (z.B. regulär,
kontextfrei, nicht leer, usw.) Wir fragen, ob es entscheidbar ist, dass eine TM eine
Sprache mit der Eigenschaft S akzeptiert. Kürzer, ob die Sprache
LS = {c(M ); M ist eine TM und L(M ) hat die Eigenschaft S}
rekursiv ist. Das ist selbstverständlich der Fall, falls S trivial ist, d.h.,
• entweder hat jede Sprache L(M ) die Eigenschaft S, oder
• keine Sprache L(M ) hat die Eigenschaft S.
Die drei oben erwähnten Eigenschaften sind bestimmt nicht trivial. Der folgende
Satz ergibt also die negativen Antworten:
Satz 1 (Satz von Rice). Für jede nichttriviale Eigenschaft S von Sprachen ist es
unentscheidbar, ob für eine Turingmaschine M die Sprache L(M ) die Eigenschaft
S hat. Kürzer: die Sprache LS ist nicht rekursiv.
128
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
Beweis.
1. Nehmen wir erst an, dass die leere Sprache ∅ die Eigenschaft S nicht
hat. Da S nicht trivial ist, gibt es eine Turingmaschine M0 , so dass gilt
L(M0 ) hat die Eigenschaft S.
Für jede Turingmaschine M und jedes Wort w konstruieren wir die folgende
Turingmaschine M w :
TURINGMASCHINE M w
u
JA
EINGABE / Akzeptiert M0
die Eingabe u?
/ Akzeptiert M
die Eingabe w?
NEIN
JA /
u akzeptiert
NEIN
u nicht akzeptiert
u nicht akzeptiert
Es gilt
L(M w ) =
(
L(M0 ) falls M die Eingabe w akzeptiert
∅
falls M die Eingabe w nicht akzeptiert
Der Übergang von (M, w) zu M w kann offensichtlich durch einen Algorithmus implementiert werden. Es gibt also eine Turingmaschine M̂ , die auf die
Eingabe c(M )w die Ausgabe c(M w ) berechnet.
Die Annahme, dass LS rekursiv ist, führt zu einem Widerspruch: es würde
folgen, dass Lacc (5.3.1) rekursiv ist. In der Tat erhalten wir, falls MS ein
Algorithmus für die Sprache LS ist, den folgenden Algorithmus für Lacc :
TURINGMASCHINE Macc
u
u nicht akzeptiert
O
EINGABE
NEIN
Hat u die Form
u = c(M )w für
eine TM M ?
NEIN
JA /
c(M w ) wird
von M̂
berechnet.
Akzeptiert
/ MS Eingabe
c(M w )?
JA
u nicht akzeptiert
u nicht akzeptiert
In der Tat akzeptiert Macc genau die Wörter c(M )w, für die MS die Eingabe
c(M w ) akzeptiert, d.h., für die die Sprache L(M w ) die Eigenschaft S hat. Es
gilt:
L(M w ) hat die Eigenschaft S ⇐⇒ M akzeptiert w,
denn für L(M w ) haben wir nur zwei Möglichkeiten: L(M w ) = L(M0 ) und
L(M0 ) hat die Eigenschaft S, oder L(M w ) = ∅, und ∅ hat die Eigenschaft S
nicht. Also: Macc akzeptiert genau die Wörter c(M )w, die in Lacc liegen. Da
Macc auf jede Eingabe hält, bekommen wir einen Widerspruch zu 5.3.1.
2. Nehmen wir an, dass die leere Sprache ∅ die Eigenschaft S hat. Sei S die
komplementäre Eigenschaft (das heißt, die Negation von S), die genau die
Sprachen haben, die die Eigenschaft S nicht haben. Speziell hat ∅ also nicht
die Eigenschaft S, und S ist sicher nichttrivial. Aus (1) folgt, dass LS nicht
rekursiv ist. Daraus folgt, dass die Sprache LS (aller Wörter, die nicht in
LS liegen) nicht rekursiv ist, denn LS ist der Durchschnitt von LS und der
5.3. WEITERE UNENTSCHEIDBARE PROBLEME
129
Sprache aller Codes {c(M ); M eine TM}. Die letztere Sprache ist rekursiv,
siehe Bemerkung in 5.1 Falls also auch LS rekursiv wäre, müsste LS rekursiv
sein. Aus Satz ??? folgt, dass LS nicht rekursiv ist.
5.3.5
Minimierung von Turingmaschinen
Wir zeigen, dass es im Gegensatz zu endlichen Automaten keinen Minimierungsalgorithmus für Turingmaschinen gibt. Für jede TM (die, wie oben, das Bandalphabet
{0, 1} hat) bezeichnen wir mit fM die partielle Funktion, die M wie folgt berechnet: falls M die Eingabe n (binär) hat, und falls M hält, ist fM (n) die Zahl, die
auf dem Band steht, wenn alle Blanksymbole und eventuell am Anfang stehende
Nullen ignoriert werden. Ein Minimierungsalgorithmus für Turingmaschinen ist ein
Algorithmus A, der jeder Turingmaschine M eine Turingmaschine A(M ) mit der
minimalen Anzahl von Zuständen zuordnet, die dieselbe Funktion berechnet,
fM (n) = fA(M ) (n)
für alle n.
Beispiel 1. Für jede Turingmaschine M , die die Identitätsfunktion berechnet, d.h.,
fM (n) = n für alle n ∈ erfüllt, hat die Turingmaschine A(M ) nur einen Zustand.
Denn die Identitätsfunktion kann von einer TM mit einem einzigen Zustand und
keiner Übergangsregel realisiert werden.
Satz 2. Es gibt keinen Minimierungsalgorithmus für Turingmaschinen.
Beweis. Wir merken erst an, dass es für jede Turingmaschine M und jedes Wort
w möglich ist, die folgende Turingmaschine M(w) zu konstruieren
TURINGMASCHINE M(w)
n
EINGABE /
(binär)
Hält M auf die
NEIN /
M(w) lässt n ausgeben
Eingabe w in
höchstens n Schritten?
JA
M(w) schreibt Ausgabe 0
Also simuliert M(w) die Turingmaschine M auf die Eingabe w für k ≤ n Schritte,
bis M hält, und dann schreibt M(w) die Ausgabe 0; falls M in n Schritten nicht
hält, schreibt M(w) die Ausgabe n. Der Übergang von M und w zu M(w) kann
offensichtlich von einer Turingmaschine M̂ durchgeführt werden (M̂ ist eine einfache
Modifikation der universalen TM). Also ist M̂ eine TM, die auf die Eingabe c(M )w
die Ausgabe c(M(w) ) liefert. Es gilt:
fM(w) (n) = n,
falls M auf Eingabe w nicht hält,
d.h., die Machine M(w) berechnet die Identitätsfunktion. Also gilt für jeden Minimierungsalgorithmus A,
A(M(w) ) hat 1 Zustand, falls M auf w nicht hält.
Umgekehrt gilt: falls M auf Eingabe w hält, ist fM(w) nicht die Identitätsfunktion.
Es gilt also:
M hält nicht auf Eingabe w ⇐⇒ A(M(w) ) berechnet die Identitätsfunktion.
130
KAPITEL 5. UNENTSCHEIDBARE PROBLEME
Die Annahme, dass es einen Minimierungsalgorithmus A gibt, führt zu einem Widerspruch: es folgt, dass die Sprache Lhalt rekursiv-aufzählbar ist (siehe Korollar in
5.2). In der Tat akzeptiert die folgende Turingmaschine M ∗ die Sprache Lhalt :
TURINGMASCHINE M ∗
u
EINGABE / Hat u die Form
u = c(M )w für
eine TM M ?
JA /
c(M(w) ) wird
von M̂
berechnet.
/
M(w) wird
von A
minimiert.
/
NEIN
u nicht akzeptiert
/
Hat A(M(w) )
nur einen
Zustand?
NEIN
JA
/
Berechnet A(M(w) )
die
Identitätsfunktion?
JA /
u akzeptiert
NEIN
u nicht akzeptiert
u nicht akzeptiert
(Die letzte Entscheidung, ob eine TM mit nur einem Zustand die Identitätsfunktion
berechnet, lässt sich bestimmt mit einem kleinen Algorithmus durchführen.) Die
Maschine M ∗ hält auf jede Eingabe und akzeptiert alle Wörter u = c(M )w, wobei
M(w) die Identitätsfunktion berechnet. Da fM(w) genau dann die Identitätsfunktion
ist, wenn M auf die Eingabe w nicht hält, gilt
M ∗ akzeptiert c(M )w ⇐⇒ M hält nicht auf w.
Kürzer: L(M ∗ ) = Lhalt , ein Widerspruch.
Kapitel 6
Komplexität von
Algorithmen
Bisher haben wir uns die Frage gestellt, ob ein Problem entscheidbar (d.h. mit
Hilfe eines Algorithmus lösbar) ist. Jetzt wollen wir auch die Effizienz von Algorithmen diskutieren. Es gibt wichtige Aufgaben, wie z.B. jeden Graphen mit der
kleinstmöglichen Zahl an Farben zu färben (ohne dass eine Kante gleichfarbige Knoten verbindet), für die es zwar Algorithmen gibt, aber kein effizienter Algorithmus
bekannt ist.
Wir führen zuerst die Klasse P aller Probleme ein, die effizient lösbar sind; z.B. das
Problem, jeden Graphen, für den es möglich ist, mit zwei Farben zu färben. Effi”
zient“ bedeutet: in polynomialer Zeit durchführbar. Genauer: ein Problem gehört
der Klasse P an, falls es mit einem Algorithmus lösbar ist, für den es ein Polynom
p(m) gibt, so dass für jede Eingabe der Größe m die Lösung in p(m) Zeiteinheiten
gefunden werden kann. Es zeigt sich, dass die Klasse P nicht von dem Modell der
Berechnung abhängt: es kann eine Turingmaschine, eine RAM oder eine moderne
Workstation sein. (Natürlich wird für diese drei Modelle das ausgewählte Polynom
p(n) ganz verschieden sein, d.h., der Grad der Effizienz“ hängt sehr von der kon”
kreten Implementierung ab. Aber die prinzipielle Möglichkeit, die Zeit durch ein
Polynom zu beschränken, ist implementierungsunabhängig.)
Danach wird die Klasse N P aller Probleme eingeführt, für die wenigstens die Überprüfung, ob eine gegebene Datei das Problem löst, effizient ist. Z.B. das Problem,
jeden Graphen, für den es möglich ist, mit drei Farben zu färben: es ist kein effizienter Algorithmus bekannt, aber die Überprüfung, ob eine vorgeschlagene Färbung
wirklich drei Farben benutzt und keine Kante zwischen gleichfarbigen Knoten ergibt, ist effizient. Leider ist es bis heute nicht bekannt, ob P = N P. Aber es sind
viele Probleme bekannt, die N P-vollständig“ sind - für diese gilt: wäre eines dieser
”
Probleme effizient lösbar, wären es alle anderen auch, denn dann folgt P = N P. Das
erwähnte Problem der Dreifärbung von Graphen ist, wie wir beweisen werden, N Pvollständig. Es scheint sehr unwahrscheinlich, dass dieses Problem effizient lösbar
ist, aber falls ja, würde daraus folgen, dass viele andere wichtige Probleme (z.B.
Traveling Salesman Problem) effizient lösbar wären.
Dieses Kapitel hat, wie die vorigen, theoretischen Charakter; z.B. benutzt die Klasse P beliebige Polynome zur Zeiteinschränkung und das ist nicht realistisch“, falls
”
das Polynom einen zu großen Exponenten hat. Dennoch hat Komplexitätstheorie
wichtige praktische Aspekte. Stellen Sie sich vor, dass Ihr Chef Sie damit beauftragt
hat, ein Programm zu schreiben, das überprüft, ob eine vorgeschlagene Produktspe131
132
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
zifikation realisierbar ist. Trotz einigen Wochen intensiven Versuchens ist es Ihnen
nicht gelungen, das Programm zu schreiben. Was jetzt? Wenn Sie die Produktspezifikation analysieren und feststellen, dass sie sehr allgemein formuliert ist, liegt es
vielleicht an der Allgemeinheit und nicht an Ihrer Unfähigkeit. Es wäre z.B. toll,
wenn Sie zeigen können, dass das von Ihnen verlangte Programm eigentlich auch
das Halteproblem lösen könnte – dann können Sie Ihrem Chef beweisen, dass er
unlösbare Aufgaben erteilt. Das ist aber leider nicht sehr wahrscheinlich, denn das
Halteproblem ist doch sehr allgemein. Also versuchen Sie zu zeigen, dass Ihr Programm eines von den hunderten N P-vollständiger Problemen lösen würde – das
zeigt nicht, dass die Aufgabe prinzipiell nicht effektiv implementierbar wäre, aber
dass es schon einer Schar ausgezeichneter Programmierer nicht gelungen ist, einen
effizienten Algorithmus zu entwickeln.
6.1
Beispiele effizienter Algorithmen
In diesem Abschnitt illustrieren wir eine genaue Analyse der Effizienz von Algorithmen an einigen wichtigen Beispielen von Graphen-Algorithmen. Ein gerichteter
Graph G = (V, E), wobei V die Menge aller (n) Knoten und E die Menge aller Kanten (d.h. geordneten Paaren von Knoten) ist, wird gewöhnlich durch seine
n × n-Adjazenzmatrix
(aij )
repräsentiert, wobei
aij =
(
1 falls (i, j) eine Kante in E ist
0 sonst
Oder durch Adjazenzlisten, d.h., durch n lineare Listen, wobei die i-te Liste alle Knoten j mit (i, j) ∈ E enthält und die heads (Listenköpfe) in einem Array
gespeichert werden. Beispiel: für den gerichteten Graphen
89:;
?>=<
1
O
89:;
?>=<
/ 2
89:;
?>=<
3 _?
?
89:;
?>=<
5 o
89:;
?>=<
??
??
? 4
haben wir die Adjazenzmatrix der Gesamtgröße m = n2
0
0
0
0
1
1
1
0
0
0
0
1
0
1
0
0
1
0
0
0
0
0
0
1
0
und die Adjazenzlisten der Gesamtgröße m = n + k
6.1. BEISPIELE EFFIZIENTER ALGORITHMEN
133
1
/ 2
2
/ 2
/ 4
4
/ 5
/ 3
5
/ 1
/ 3
3
Beispiel 1 (Topologisches Sortieren). In Abschnitt 2.7 haben wir den folgenden
Algorithmus für das topologische Sortieren eines gerichteten Graphen G = (V, E)
beschrieben:
1: {(1) Initialisierung}
2: i := 0
3: W := V {W – die Menge der noch nicht bearbeiteten Knoten}
4: {(2) Rekursionsschritt}
5: while ein Knoten x ∈ W ohne Vorgänger existiert do
6:
i := i + 1;
7:
ord(x) = i;
8:
W := W − {x}
9:
Löschen des Knotens x aus dem Graphen
10: od
Wie lange dauert dieser Algorithmus für einen Graphen mit n Knoten? Nehmen
wir an, dass eine Eintragung in die Liste ord sowie die Modifikation der Variablen
i und W eine konstante Zahl A von Zeiteinheiten dauert. Um einen Knoten x ohne
Vorgänger zu finden, suchen wir in der Adjazenzmatrix eine Spalte mit lauter Nullen; das dauert Km2 Zeiteinheiten, wobei K eine Konstante ist und m die aktuelle
Knotenzahl ( m = n, n − 1, . . . , 1), und die Entfernung eines Knotens dauert eine
konstante Zahl L von Zeiteinheiten. Dann ist die gesamte Zahl von Zeiteinheiten
für diesen Algorithmus
T = 2A +
n
X
(Km2 + 3A + L) > Cn3
für eine Konstante C.
m=1
Dieser Algorithmus kann viel effizienter implementiert werden. Diesmal stellen wir
den Graphen mittels Adjazenzlisten dar. Wir bezeichnen für jeden Knoten v mit
IN [v]
(ein Array, v = 1, . . . , n)
die Zahl aller Kanten mit dem Endknoten v und wir setzen
U = {v; v ∈ V und IN [v] = 0}.
Algorithmus für Topologisches Sortieren
Eingabe: Gerichteter Graph G = (V, E) mit n Knoten und k Kanten
Ausgabe: Topologische Sortierung ord : V → {1, . . . , n} von G, falls G azyklisch
ist
1: {(1) Initialisierung}
2: i := 0 {i – die letzte Zahl, die ord benutzt hat}
3: U := ∅ {U - die Menge aller Knoten v mit IN [v] = 0}
4: IN [1] := 0, . . . , IN [n] := 0
134
5:
6:
7:
8:
9:
10:
11:
12:
13:
14:
15:
16:
17:
18:
19:
20:
21:
22:
23:
24:
25:
26:
27:
28:
29:
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
for alle Knoten v in V do
for alle Knoten w mit einer Kante (v, w) in E do
IN [w] := IN [w] + 1
end for
end for
for alle Knoten v in V do
if IN [w] = 0 then
U := U ∪ {v}
end if
end for
{(2) Rekursionsschritt}
while U einen Knoten v enthält do
U := U − v
i := i + 1
ord(v) := i
for alle Knoten w mit (v, w) ∈ E do
IN [w] := IN [w] − 1
if IN [w] = 0 then
U := U ∪ {w}
end if
end for
od
{(3) Ausgabe}
Falls n = i, ist ord eine topologische Sortierung von G.
Falls n > i, ist die Ausgabe ein Code dafür, dass G nicht azyklisch ist.
Korrektheit: Für jeden azyklischen Graphen G ist ord eine topologische Sortierung
von G. Das folgt daraus, dass jeder azyklische Graph einen Knoten ohne Vorgänger
hat. Deshalb ist U 6= ∅, solange nicht alle Knoten sortiert worden sind. Für jede
Kante (v, w) von G gilt: falls in einem Durchgang der Schleife 16–26 der Wert
ord(v) := i zugeordnet wird, hat vor diesem Durchgang IN [w] einen Wert ≥ 1.
Deswegen wird der Wert ord(w) erst in einem Durchgang i + k, k ≥ 1, zugewiesen
und es folgt ord(v) < ord(w).
Zeitkomplexität: Wir wollen die Zahl der Zeiteinheiten bestimmen, die dieser Algorithmus für Graphen mit n Knoten und k Kanten braucht. Das hängt von der
Implementierung ab. Wir nehmen an, dass die mengentheoretischen Operationen
(insert, delete) so implementiert werden, dass sie eine konstante Zahl A von Zeiteinheiten brauchen, und auch jede Zuweisung A Zeiteinheiten benötigt.
Dann dauert die Initialisierung:
Zeile
2.
3.
4.
5.–9.
10.–14.
Zeitkomplexität
A
A
An
n + Ak
2An
(3A + 1)n + Ak Zeiteinheiten
Nur die Zeilen 5.–9. benötigt eine Erklärung: bezeichnen wir mit k(v) die Zahl aller
Nachfolger von v. Die Implementierung mit Adjazenzlisten erlaubt
Pn eine Durchführung
der Schleife 6.–8. in Zeit Ak(v). Die ganze Schleife dauert n + v=1 Ak(v) = n + Ak
Zeiteinheiten.
Im Rekursionsschritt dauert 20.–25. 3Ak(v) Schritte. Da die Rekursion n-mal wie-
6.1. BEISPIELE EFFIZIENTER ALGORITHMEN
135
derholt wird, benötigt sie
17.
18.
19.
20.–25.
An
An
An
3Ak
3A(n + k) Zeiteinheiten
Die Zeitkomplexität des Algorithmus ist also
(6A + 1)n + 4Ak Zeiteinheiten.
Bemerkung 1. Die Konstante A hängt von der konkreten Implementierung ab.
Um von solchen Details in unserer Analyse absehen zu können, führen wir, für jede
Funktion t(n), die Klasse
O(t(n))
(gelesen: O von t(n)“)
”
ein, die aus allen Funktionen f (n) besteht, die nicht schneller als t(n) wachsen (für
große Werte von n):
Definition. O(t(n)) bezeichnet die Klasse aller Funktionen f (n), für die es Konstanten n0 und C gibt, so dass
f (n) ≤ Ct(n)
für alle n ≥ n0 .
Beispiel 2.
1. Der Algorithmus für topologische Sortierung hat eine lineare
Zeitkomplexität
O(n + k)
Es gilt (6A + 1)n + 4Ak ≤ C(n + k), wobei C = 6A + 1, für alle n ≥ 0.
2. Jedes quadratische Polynom gehört zur Klasse
O(n2 ).
In der Tat, für
f (n) = a + bn + cn2 =
a
b
+
+
c
n2
n2
n
gilt: falls n ≥ max{a, b}, ist f (n)leq(2 + c)n2 . Es genügt also, n0 = max{a, b}
und C = 2 + c zu setzen.
3. Allgemeiner enthält die Klasse
O(nk )
alle Polynome des Grades k.
4. Die exponentielle Funktion 2n gehört nicht zu der Klasse O(nk ), denn
lim
n→∞
2n
= ∞.
nk
Bemerkung 2. Falls Graphen als Adjazenzmatrizen implementiert werden, benötigt
jeder Algorithmus für das topologische Sortieren mindestens
n2
Schritte
2
136
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
In der Tat muss jeder Algorithmus für jedes der n2 Paare (i, j) entweder aij oder
aji in der Adjazenzmatrix durchsuchen. (Stellen wir uns vor, dass ein Algorithmus
A weder aij noch aji durchsucht. Für den Graphen G mit n Knoten und keiner
Kante ergibt A ein topologisches Sortieren. Bezeichnen wir mit G den Graphen, der
genau zwei Kanten i → j und j → i enthält. Dann wird G mit dem Algorithmus A
genau wie G bearbeitet, obwohl G zyklisch ist. Das ist ein Widerspruch.)
Also ist auch bei dieser Implementierung die Zeitkomplexität linear in der Größe
n2 der Eingabe.
Beispiel 3 (2-FÄRBUNG). Wir wollen einen (ungerichteten) Graphen G mit zwei
Farben, z.B. rot und blau, so färben, dass keine zwei benachbarten Knoten gleichfarbig sind. Es ist klar, dass das für Graphen, die ein Dreieck enthalten, unmöglich
ist. Allgemeiner: für einen Graphen mit einem Zyklus ungerader Länge existiert
keine solche Färbung.
In dem Fall, dass G keine Zyklen ungerader Länge hat, läßt sich ein einfacher Algorithmus wie folgt angeben: wir wählen einen Knoten v und färben ihn rot. Alle
Nachbarn von v werden blau gefärbt – da G kein Dreieck enthält, verursacht diese
Färbung keine Probleme. Dann werden alle Nachbarn der zuletzt gefärbten Knoten
rot gefärbt - da G kein Dreieck und keinen Zyklus aus fünf Kanten enthält, verursacht auch dies keine Probleme. So wird fortgefahren, bis die ganze Komponente
von v (d.h., alle Knoten, die mit v durch einen ungerichteten Weg verbunden sind)
gefärbt ist. Dann wählen wir wieder einen beliebigen, noch nicht gefärbten, Knoten,
der rot gefärbt wird, usw. Wir beschreiben diesen Algorithmus formal. Die Mengen
aller (schon) roter oder blauer Knoten werden mit ROT und BLAU bezeichnet, die
Menge aller zuletzt gefärbten Knoten mit F .
Algorithmus für 2-Färbung
Eingabe: Ungerichteter Graph G = (V, E)
Ausgabe: Eine 2-Färbung V = ROT ∪ BLAU , falls es eine gibt.
1: {1. Initialisierung}
2: ROT := ∅
3: BLAU := ∅
4: F := ∅
5: {2. Rekursionsschritt}
6: while V 6= ∅ do
7:
wähle v aus V
8:
V := V − {v}
9:
ROT := ROT ∪ {v}
10:
F := F ∪ {v}
11:
while F 6= ∅ do
12:
wähle w in F
13:
for alle Knoten u ∈ V mit (u, w) ∈ E do
14:
if w ∈ ROT then
15:
BLAU := BLAU ∪ {u}
16:
else
17:
ROT := ROT ∪ {u}
18:
end if
19:
F := F ∪ {u}
20:
V := V − {u}
21:
end for
22:
F := F − {w}
23:
od
24: od
6.1. BEISPIELE EFFIZIENTER ALGORITHMEN
25:
26:
137
{3. Ausgabe}
Falls ROT oder BLAU eine Kante aus E enthalten, ist die Ausgabe ein Code
dafür, dass G keine 2-Färbung hat. Falls weder ROT noch BLAU eine Kante
enthält, ist dies die gesuchte 2-Färbung.
Korrektheit: In jedem Schritt des Algorithmus gilt für jeden Knoten v: entweder
v ∈ V oder v ∈ ROT oder v ∈ BLAU . Da am Ende V = ∅ gilt, ist also jeder
Knoten entweder rot oder blau gefärbt. Falls weder ROT noch BLAU eine Kante
enthält, haben wir eine 2-Färbung gefunden.
Es bleibt zu zeigen, dass G Zyklen ungerader Länge hat, falls ROT eine Kante
enthält (analog für BLAU). Sei v der Knoten in 7. Wir beweisen, dass jeder Knoten,
der in 17. rot (oder in 15. blau) gefärbt wird, einen Weg von gerader (oder ungerader)
Länge nach v hat, wobei die Länge des leeren Weges“ von v nach v gleich 0 gesetzt
”
wird. Am Anfang der Schleife ab 11. ist das klar, denn der einzige roten Knoten ist
v, und blaue gibt es nicht. Jeder Durchgang dieser Schleife erhält diese Eigenschaft:
falls w rot ist und also einen Weg der Länge 2k nach v hat, wird jeder blau zu
färbende Knoten u (für den eine Kante (u, w) gegeben ist) einen Weg der Länge
2k + 1 nach v haben. Analoges gilt, falls w blau ist.
Sei (u, u0 ) eine Kante in ROT . Wir haben einen Kreis, der mit einen Weg der Länge
2k von u nach v beginnt, dann mit einem Weg der Länge 2k 0 von v nach u0 weitergeht
und mit der Kante (u0 , u) endet. Dieser Kreis hat die ungerade Länge 2k + 2k 0 + 1
und enthält also einen Zyklus ungerader Länge (denn ein Kreis, der nur Zyklen von
gerader Länge enthält, hat selbst gerade Länge). Analog läßt sich für eine Kante in
BLAU argumentieren.
Zeitkomplexität: Falls Graphen als Adjazenzlisten implementiert werden und die
mengentheoretischen Operationen konstante Zeit erforden, hat dieser Algorithmus
eine lineare Zeitkomplexität O(n + k) (wobei n die Zahl aller Knoten und k die Zahl
aller Kanten ist).
In der Tat benötigt die Initialisierung die Zeit O(1). Die Färbung einer Komponente
K (die Zeilen 8.–23.), deren Zahl von Kanten k(K) ist, dauert O(k(K)), da jede
Kante nur einmal durchsucht wird. Falls der Graph G genau r Komponenten hat,
gilt k = k(K1 ) + · · · + k(Kr ) und die r Durchgänge der Schleife 6.–24. dauern
O(n + k) Schritte.
Die Überprüfung, ob ROT oder BLAU eine Kante enthalten, benötigt auch die
lineare Zeit O(n + k). Insgesamt wird der Algorithmus also in O(n + k) Schritten
durchgeführt.
Beispiel 4 (3-FÄRBUNG). Die analoge Aufgabe, einen gegebenen Graphen mit
drei Farben zu färben, ist viel schwieriger. Kein effizienter Algorithmus ist bekannt
– und später werden wir Gründe dafür kennenlernen, weshalb es unwahrscheinlich
ist, dass ein effizienter Algorithmus existiert.
Ineffizient können wir einfach alle möglichen Färbungen ausprobieren. Das ist bestimmt ein Algorithmus – aber er braucht O(3n ) Schritte, da es 3n Färbungsmöglichkeiten gibt. Und das ist sehr aufwendig.
Beispiel 5 (GERICHTETER WEG). Für zwei Knoten v und w eines gerichteten
Graphen ist ein Weg der Länge d von v nach w eine Liste
v = v 0 , v1 , . . . , vd = w
von Knoten, so dass
(vi−1 , vi ) eine Kante für i = 1, . . . , d ist.
138
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Jeder Knoten hat einen (leeren) Weg der Länge 0 zu sich selbst.
Seien ein gerichteter Graph G und zwei Knoten v und w gegeben, dann entscheiden
wir in linearer Zeit O(n + k), ob ein Weg von v nach w führt. Sei M die Menge aller
Knoten zu denen ein Weg von v führt.
Algorithmus für gerichteter Weg
Eingabe: Ein gerichteter Graph G = (V, E) und zwei Knoten v und w
Augabe: JA, falls ein gerichteter Weg von v nach w führt, ansonsten NEIN
{Initialisierung:}
M := {v}
{Rekursionsschritt:}
while eine Kante (x, y) mit x ∈ M und y ∈
/ M existiert do
M := M ∪ {y}
E := E − {(x, y)}
od
{Ausgabe:}
JA, falls w ∈ M , NEIN falls w 6∈ M .
Zeitkomplexität: Falls der Graph mit Adjazenzlisten implementiert ist, dauert dieser
Algorithmus O(n + k) Schritte, denn jede Liste wird höchstens einmal durchsucht.
6.2
Komplexitätsklasse P
Alle Probleme, die ein Rechner mit polynomialer Zeitkomplexität lösen kann, formen die Klasse P. Genauer: ein Entscheidungsproblem gehört zu P, falls es einen
Algorithmus gibt, der für jede Eingabe der Länge n in höchstens p(n) Zeiteinheiten
entscheidet, ob die Antwort JA oder NEIN ist, wobei p(n) ein (gegebenes) Polynom ist. Es entsteht die Frage: welche Implementierung haben wir hier im Sinn?
Die Antwort ist: die Klasse P ist von der Implementierung unabhängig. Verschiedene Implementierungen können natürlich verschiedene Zeitkomplexitäten haben
(wie im Fall des TOPOLOGISCHEN SORTIERENS in 6.1 gezeigt wurde); d.h.,
das Polynom p(n) wird für jede Implementierung individuell gewählt werden. Aber
die Existenz eines Polynomes ist unabhängig von der Implementierung. Das zeigen
wir, indem wir Turingmaschinen als Implementierungsmodell nehmen und dann beweisen, dass dieselbe Klasse P auch z.B. mit RAM als Modell entsteht. Der Beweis
für andere Berechnungsmodelle folgt analog.
Definition. Wir sagen, dass eine deterministische TM eine Zeitkomplexität t(n)
hat, wobei t(n) eine Funktion aus der Menge
ist, falls die TM für jede Eingabe
der Länge n in höchstens t(n) Schritten hält.
Beispiel 1. Die Sprache L ⊆ {0, 1}∗ aller Wörter, die keine zwei benachbarten
Einsen enthalten, kann von der folgenden TM akzeptiert werden: M bleibt solange
im Initialzustand q0 , wie sie Nullen liest, also (q0 , 0) → (q0, R). Falls M eine 1 liest,
geht sie in den Zustand q1 über: (q0 , 1) → (q1, R). Falls nach der 1 gleich eine 0
folgt, gehen wir zurück zum Zustand q0 , falls aber noch eine 1 gelesen wird, hält
die Maschine im (nichtfinalen) Zustand q1 . Und falls das Blanksymbol gelesen wird,
hält die Maschine im finalen Zustand qF . Hier ist eine vollständige Beschreibung
von M :
M = ({q0 , q1 , qF }, {0, 1}, δ, q0, qF )
6.2. KOMPLEXITÄTSKLASSE P
139
wobei δ durch die folgenden Übergangsregeln bestimmt wird:
(q0 , 0) → (q0 , R)
(q0 , 1) → (q1 , R)
(q0 , #) → (qF , #)
(q1 , 0) → (q0 , R)
(q1 , #) → (qF , #)
Jede Eingabe der Länge n liest die TM von links nach rechts und hält spätestens
bei dem Symbol # hinter dem Eingabewort, also nach höchstens n + 1 Schritten.
Sie hat also die Zeitkomplexität
t(n) = n + 1.
Bemerkung 1.
1. Im Kapitel 3 haben wir verschiedene Varianten von TM eingeführt (zum Beispiel mit zusätzlichem Gedächtnis, mit mehreren Bändern,
usw.). Die Definition der Klasse P (s.u.) ist unabhängig davon, welche der
Varianten als TM gemeint ist; das beweisen wir exakt im Abschnitt 6.4.
2. Zeitkomplexität ist nicht eindeutig definiert (denn sie ist nur eine Abschätzung
für die Anzahl der Berechnungsschritte). Genau genommen ist jede Funktion
t0 (n) mit t0 (n) ≥ n+1 für alle n auch eine Zeitkomplexität der TM aus Beispiel
1.
Beispiel 2. Die Sprache aller Palindrome (siehe Abschnitt 2.1, Beispiel 3) wird von
der folgenden Turingmaschine M akzeptiert. Die Maschine M hat ein zusätzliches
Gedächtnis (siehe 3.2.2) für die Symbole aus Σ und vier Zustände: q0 , Initialzustand,
qR und qL (für die Bewegung nach links oder rechts des Kopfes der Turingmaschine)
und qF , einen finalen Zustand.
Zustand q0 : Falls # gelesen wird, hält die TM und akzeptiert. Falls ein Symbol aus
Σ gelesen wird, speichert die TM es im Gedächtnis, löscht es und geht zu qR über.
Zustand qR bewegt den Kopf nach rechts bis er # liest, dann bewegt sich der Kopf
einen Schritt nach links. [Problem: nach dem Löschen des ersten Symbols steht die
TM im Zustand qR auf einem #; daher wird ein spezielles Löschsymbol benötigt.]
Falls das jetzt gelesene Symbol mit dem Gedächtnis übereinstimmt, wird es gelöscht
und die TM geht zu qL über; falls nicht, hält die TM und akzeptiert nicht. [Problem:
zum Löschen am rechten Rand brauchen wir einen weiteren Zustand, etwa qC .]
Zustand qL bewegt den Kopf nach links bis er # liest [bzw. das neue Löschsymbol],
dann bewegt er den Kopf einen Schritt nach rechts und geht zu q0 über.
Wie lange dauert die Berechnung einer Eingabe der Länge n? Der Übergang q0 → qR
dauert einen Schritt und der Übergang qR → qL dauert n + 2 Schritte. Es dauert
also
1 + (n + 2) + n = 2n + 3
Schritte, bis wieder q0 erreicht wird. Jetzt beginnt dieselbe Berechnung mit einem
Wort der Länge n − 2. Der Zustand q0 wird also in 2(n − 2) + 3 Schritten wieder
erreicht. (Wir nehmen immer den schlechtesten Fall an, hier also den Fall, dass die
Eingabe wirklich ein Palindrom ist.) Die gesamte Berechnungszeit beträgt höchstens
t(n) = (2n + 3) + (2n − 1) + · · · + 5 + 1
Schritte. Diese Summe ist gleich n2 + 4n + 4, wie durch Induktion leicht bewiesen
werden kann (?). Das bedeutet, dass unsere TM die Zeitkomplexität
t(n) = n2 + 4n + 4
140
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
hat.
Bemerkung 2. Wir können für die Sprache aller Palindrome eine fast doppelt
so schnelle TM konstruieren, indem wir die beiden ersten Buchstaben speichern
(und löschen) und sie mit den beiden letzten vergleichen (und diese dann auch
löschen). Eine noch schnellere TM würde drei (oder vier usw.) Buchstaben auf
einmal vergleichen. Wir können also eine fast k-mal schnellere TM für ein beliebig
großes k konstruieren. Wir beobachten, dass jede dieser TM eine Zeitkomplexität
hat, die von einem quadratischen Polynom repräsentiert wird.
Den gleichen Beschleunigungsprozess können wir mit jeder TM machen, indem wir
stets in einem Schritt k Felder gleichzeitig lesen und bearbeiten. Aus diesem Grund
ist nicht die Funktion t(n) selbst interessant, nur die Geschwindigkeit des Wachs”
tums“ von t(n), also die Klasse O(t(n)).
Definition. Wir bezeichnen mit
P
die Klasse aller formalen Sprachen, die von einer TM mit polynomialer Zeitkomplexität akzeptiert werden können. Genauer: eine Sprache L gehört zur Klasse P, falls
es eine Turingmaschine M und ein Polynom p(n) gibt, so dass
L = L(M )
und M hält auf Eingaben der Länge n in höchstens p(n) Schritten.
Bemerkung 3. Erinnern wir uns daran, dass
Entscheidungsproblem ≡ formale Sprache.
Genau genommen müssen wir ein Entscheidungsproblem erst codieren (z.B. binär,
mit Symbolen 0 und 1). Dann bezeichnet L ⊆ {0, 1}∗ die Sprache aller Codierungen
der Eingaben, auf die die Entscheidung JA ist. Weiter nehmen wir immer an, dass
die Codierung von Problemen vernünftig“ ist.
”
Wenn nämlich jemand freiwillig eine extrem lange Codierung der Eingabe benutzt,
kann er auch ein kompliziertes Problem in linearer Zeit p(n) = n, wobei n die
unvernünftige“ Codelänge ist, lösen. Die folgenden Regeln sind als vernünftig“
”
”
anzusehen:
1. Zahlen werden binär oder dezimal repräsentiert. (Nicht unär!)
2. Graphen werden durch Adjazenzmatrizen oder Adjazenzlisten dargestellt (siehe Abschnitt 6.1).
3. Mengentheoretische Operationen (Insert, Delete, Vereinigung, Durchschnitt)
werden so implementiert, dass ihre Ausführung eine konstante Zahl von Zeiteinheiten dauert.
Beispiel 3 (PALINDROM). Die Entscheidung, ob ein Wort ein Palindrom ist, ist
ein Problem der Klasse P, denn die TM aus Beispiel 2 hat die Zeitkomplexität
O(n2 ).
Beispiel 4 (2-FÄRBUNG). Das Problem, ob ein Graph mit zwei Farben gefärbt
werden kann, gehört zur Klasse P. In Abschnitt 6.1 haben wir dafür einen Algorithmus mit linearer Zeitkomplexität beschrieben. Es ist nicht kompliziert, den
Algorithmus mit einer TM zu implementieren und zu beweisen, dass diese TM polynomiale Zeitkomplexität hat.
6.2. KOMPLEXITÄTSKLASSE P
141
Beispiel 5 (2-ERFÜLLBARKEIT und 3-ERFÜLLBARKEIT). Analog zu der Situation der 2-Färbung und 3-Färbung haben wir hier ein anderes wichtiges Beispiel der Probleme, deren leichtere Variante zu P gehört und deren schwierige
(wahrscheinlich) nicht. Es handelt sich um Boolesche Formeln über den Variablen
x1 , . . . , xn . Die einfachsten Formeln sind die Variablen xi selbst und ihre Negationen ¬xi - diese Formeln heißen Literale. Die komplizierteren Formeln werden mit
Hilfe der üblichen logischen Operationen, z.B. Konjunktion ∧, Disjunktion ∨ und
Implikation → erzeugt.
Jede Disjunktion von Literalen heißt Klausel .
Beispiele:
x ∨ y ∨ ¬z
¬x.
und
Jede Boolesche Formel phi hat eine konjunktive Normalform (KNF), d.h., φ =
φ1 ∧ φ2 ∧ · · · ∧ φn ist eine Konjunktion der Klauseln φ1 , . . . , φn . Z.B. hat die Formel
φ = (x → y ∧ z) ∧ (¬x → ¬z)
die folgende KNF: wir benutzen die Äquivalenz von
a→b
und
¬a ∨ b
und erhalten
φ = (¬x ∨ (y ∧ z)) ∧ (x ∨ ¬z)
Da ¬x ∨ (y ∧ z) äquivalent zu (¬x ∨ y) ∧ (¬x ∨ z) ist (de Morgansches Gesetz), gilt
φ = (¬x ∨ y) ∧ (¬x ∨ z) ∧ (x ∨ ¬z).
Das ist also eine Boolesche Formel, deren Klauseln je zwei Literale enthalten.
Eine Formel φ heißt erfüllbar , falls die Variablen so mit true oder false belegt
werden können, dass φ den Wert true annimmt. Beispiel: die obige Formel ist
erfüllbar, denn für
x = true, y = true, z = true
gilt φ = true.
Es ist kein effizienter Algorithmus bekannt, der für jede Boolesche Formel unterscheidet, ob sie erfüllbar ist. Das Problem m-ERFÜLLBARKEIT ist: Gegeben,
eine Boolesche Formel φ in konjunktiver Normalform, wobei jede Klausel m Literale enthält, ist φ erfüllbar? Wir definieren die Größe der Eingabe φ als n + k, wobei
n die Anzahl aller Variablen und k die Anzahl aller Klauseln von φ ist.
2-ERFÜLLBARKEIT gehört zur Klasse P. Wir könnten hier einen effizienten Algorithmus angeben, aber einfacher ist es zu zeigen (in Abschnitt 6.3), dass es eine
effiziente Reduktion dieses Problems auf ein anderes Problem der Klasse P gibt –
daraus folgt dann indirekt, dass 2-ERFÜLLBARKEIT zur Klasse P gehört.
3-ERFÜLLBARKEIT ist dagegen schwierig: in Abschnitt 6.4 zeigen wir, dass dieses
Problem N P-vollständig ist, also genauso schwierig wie 3-FÄRBUNG.
Beispiel 6 (UNIVERSALITÄT REGULÄRER AUSDRÜCKE). Das ist ein (rares)
Beispiel eines leicht zu formulierenden Problems, für das bewiesen wurde, dass es
nicht effizient lösbar ist. Reguläre Ausdrücke haben wir in Kapitel 1 eingeführt: sie
werden aus Buchstaben des Alphabets Σ, z.B. Σ = {a, b}, und Symbolen ∅ und mit
Hilfe der Operatoren +, ·, und ∗ erzeugt. Jetzt arbeiten wir mit komprimierter
Notation: statt xx . . . x (n-mal) schreiben wir x ↑ n (n binär), z.B.
xxxxx = x ↑ 101
142
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Der reguläre Ausdruck
(aaa + b∗ )(aaa + b∗ )
ergibt also in komprimierter Notation
(a ↑ 11 + b∗ ) ↑ 10.
Ein regulärer Ausdruck über dem Alphabet Σ heißt universal , falls die dadurch
definierte Sprache die ganze Sprache Σ∗ ist. Z.B. ist der obige reguläre Ausdruck
(über Σ = {a, b}) nicht universal, aber (a∗ ↑ 11 + b∗ ) ↑ 10 ist universal. Jeder
reguläre Ausdruck über Σ ist also ein Wort über dem Alphabet
Σ ∪ {∗, +, (, ), 0, 1, ↑}
und die Länge dieses Wortes ist dann die Größe der Eingabe.
Satz 1. Das Problem, zu entscheiden, ob ein gegebener regulärer Ausdruck in komprimierter Notation über {a, b} universal ist, gehört nicht zu P.
Den Beweis kann der Leser unter 13.15 im Buch von Hopcroft und Ullman (siehe
Einleitung [?]) finden.
6.3
Berechnungsprobleme und Reduzierbarkeit
Die Komplexitätsklasse P wurde für Entscheidungsprobleme eingeführt. Analog
können wir für Berechnungsprobleme die Klasse
FP
einführen, die alle in polynomialer Zeit lösbaren Probleme enthält.
Beispiel 1. 2-FÄRBUNG ist das Problem, zu jedem 2-färbbaren Graphen eine
2-Färbung zu berechnen. Darunter verstehen wir, wie üblich, eine Funktion
f : {0, 1}∗ → {0, 1}∗ ,
die jedem binären Code w = c(G) eines Graphen G einen binären Code f (w) seiner
2-Färbung zuordnet, falls G eine 2-Färbung hat.
So eine Funktion kann in linearer Zeit berechnet werden, siehe Beispiel 3 in 6.1.
Wir verwenden wieder TM als Berechnungsmodell. Wir sagen, dass eine TM eine
Funktion
f : Σ ∗ → Γ∗
(Σ, Γ zwei Alphabete)
berechnet, falls die TM für jede Eingabe s1 s2 . . . sn (aus Σ∗ ) nach endlich vielen
Schritten mit dem Wort f (s1 . . . sn ) (aus Γ∗ ) auf dem Band hält, siehe Abschnitt
3.5
Definition. Wir bezeichnen mit FP die Klasse aller Funktionen f : Σ∗ → Γ∗ ,
die von einer TM in polynomialer Zeit berechnet werden können. D.h., für die eine
Turingmaschine M und ein Polynom p(n) existieren, so dass M auf jede Eingabe
s1 . . . sn aus Σ∗ in höchstens p(n) Schritten hält und f (s1 . . . sn ) auf das Band
schreibt.
6.3. BERECHNUNGSPROBLEME UND REDUZIERBARKEIT
143
Beispiel 2 (STARKE KOMPONENTEN). Zwei Knoten eines gerichteten Graphen
G können genau dann in beiden Richtungen durch einen gerichteten Weg verbunden
werden, wenn sie in einem Kreis des Graphen liegen. Wir sagen dann, dass die beiden
Knoten in derselben starken Komponente liegen.
Genauer: eine starke Komponente von G ist eine maximale Menge von Knoten,
die durch gerichtete Wege (in beiden Richtungen) miteinander verbunden werden
können. Beispiel: der folgende Graph
b
<•E
yy EEEE
y
y
EE
yy
"
a • oy
l
l l• c
l
l
lll lll
ul
/
o
E
•
d EE
• e
EE yyyy
EE yy
" |y
•
f
hat drei starke Komponenten: {a, b, c}, {d, e} und {f }.
Aufgrund des Algorithmus aus Beispiel 5 in 6.1 können wir einen trivialen Algorithmus finden, der für einen Graphen mit n Knoten und k Kanten in der Zeit
O(n2 (n + k)) die starken Komponenten aufzählt: wir wählen einen Knoten v und
fragen für jeden Knoten w, ob ein Weg von v zu w sowie ein Weg von w nach v
führt. Das braucht O(2(n + k)) = O(n + k) Schritte für jeden Knoten w, also insgesamt O(n(n + k)) Schritte. Damit wird die starke Komponente von v in der Zeit
O(n(n + k)) bestimmt. Außerdem gibt es höchstens n starke Komponenten, also ist
die gesamte Komplexität O(n2 (n + k)).
Es existiert ein Algorithmus, der die starken Komponenten in linearer Zeit O(n + k)
berechnet. Diesen werden wir hier aber nicht vorführen.
Bemerkung 1. Starke Komponenten jedes Graphen G formen einen neuen gerichteten Graphen G. Genauer, die Knoten von G sind die starken Komponenten v der
Knoten v von G. Und für zwei starke Komponenten v, w von G gilt:
(v, w) ist eine Kante von G genau dann, wenn v 6= w und ein gerichteter Weg von
v nach w führt in G.
Zum Beispiel ergibt sich aus dem obigen Graphen G der folgende Graph
• {a, b, c}
• {d, e}
• {f }
Es ist klar, dass der neue Graph G azyklisch ist (denn jeder Kreis von G kann zu
einem Kreis aus G ergänzt werden, der dann mehrere starke Komponenten verbinden würde, das ist jedoch nicht möglich). Aufgrund von Beispiel 1 in 6.1 können
also die starken Komponenten jedes gerichteten Graphen so sortiert werden, dass
ord(v) ≤ ord(w)
für jede Kante (v, w) von G.
Bemerkung 2. Wir wollen verschiedene Entscheidungsprobleme bezüglich ihrer
Komplexität vergleichen. Wann kann man sagen, dass ein Problem L ⊆ Σ∗ nicht
schwieriger ist, als ein Problem L0 ⊆ Γ∗ ? Falls wir eine Übersetzung f haben, die
alle Instanzen des ersten Problems (d.h., Wörter über Σ) in Instanzen des zweiten
144
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
(Wörter über Γ) überführt, so dass die Lösungen von L genau den Lösungen von
L0 entsprechen und f selbst effizient berechenbar ist:
Definition. Wir sagen, dass eine Sprache L ⊆ Σ∗ in polynomialer Zeit auf eine
Sprache L0 ⊆ Γ∗ reduzierbar ist, falls es eine Funktion f : Σ∗ → Γ∗ der Klasse
FP mit
x ∈ L genau dann, wenn f (x) ∈ L0
(für alle x ∈ Σ∗ )
gibt.
Aufpassen! Die Voraussetzung, dass die Reduktion f zur Klasse FP gehört, ist der
Kern dieser Definition! Es ist nämlich trivial, eine beliebige Funktion f zu definieren,
für die gilt x ∈ L genau dann, wenn f (x) ∈ L0 : man wähle zwei Wörter w ∈ L0
und w0 ∈
/ L0 und setze
(
w falls x ∈ L
f (x) =
w0 falls x ∈
/L
Beispiel 3 (KANTEN-2-FÄRBBARKEIT). Wir wollen für einen gegebenen ungerichteten Graphen G wissen, ob sich seine Kanten derart blau und rot färben lassen,
so dass Kanten mit gemeinsamen Knoten nie gleichfarbig sind. [Achtung: Wir haben gerade ein Entscheidungproblem formuliert; das zugehörige Berechnugsproblem
besteht darin, eine legitime Kantenfärbung zu konstruieren, oder festzustellen, daß
keine existiert. Insofern können wir das Entscheidungprobem auf dem Umweg über
das Berechnungsproblem lösen.] Dieses Entscheidungsproblem können wir wie folgt
auf das Problem von 2-Färbbarkeit (von Knoten) reduzieren: für jeden ungerichteten Graphen G = (V, E) bezeichnen wir mit Ĝ = (E, H) den dualen Graphen,
dessen Knoten die Kanten von G sind, und zwei Kanten von G formen in Ĝ eine
Kante (also gehören sie zu H) genau dann, wenn sie in G benachbart sind. Beispiel:
3
•???
??
?
•2
1•
5•
•4
G
•?(2, 3)
???
??
(1, 3) •
• (1, 2)
•(2, 4)
Ĝ
Es gilt: jede 2-Färbung von Ĝ ergibt eine Kanten-2-Färbung von G und umgekehrt.
Folglich ist Ĝ genau dann 2-färbbar, wenn dies für G gilt.
Ist diese Reduktion in polynomialer Zeit durchführbar? Das heißt, gehört die Funktion f : {0, 1}∗ → {0, 1}∗, die jedem Code wG eines Graphen G den Code f (wG ) = wĜ
des dualen Graphen zuordnet, zu FP? Falls die Graphen als Adjazenzmatrizen implementiert werden, wird zu einer Matrix M die folgende Matrix f (M ) zugeordnet:
die Zeilen und Spalten von f (M ) sind mit allen Paaren (i, j) markiert, wobei i ≤ j
und Mij = 1. Und f (M ) hat eine 1 in der Position von Zeile (i, j) und Spalte (i0 , j 0 )
genau dann, wenn i = i0 oder j = j 0 . Das können wir in linearer Zeit O(m), wobei
m die Größe der Eingabe ist (m = n2 für Graphen mit n Knoten), berechnen.
Satz 1. Falls eine Sprache L0 zur Klasse P gehört, gehören zu P auch alle Sprachen, die sich in polynomialer Zeit auf L0 reduzieren lassen.
Beweis. Wir haben eine Turingmaschine M0 , die L0 ⊆ Γ∗ akzeptiert, und eine
polynomiale Zeitkomplexität p(n) hat. Für jede Sprache L ⊆ Σ∗ und jede Funktion
f : Σ∗ → Γ∗ der Klasse FP, die x ∈ L ⇐⇒ f (x) ∈ L0 erfüllt, zeigen wir, dass
6.3. BERECHNUNGSPROBLEME UND REDUZIERBARKEIT
145
die Sprache L zu P gehört. Sei M eine Turingmaschine mit polynomialer Zeitkomplexität q(n), die f berechnet. Wir benutzen die folgende 2-Band Turingmaschine
M̃ :
BAND 1: Eingabeband
(Simulation von M )
s1 s2
...
sn
BAND 2: Simulation von M0
Auf Band 1 wird erst M simuliert, so dass die Eingabe x = s1 s2 . . . sn , nachdem
M gehalten hat, das Wort f (x) auf Band 1 ergibt. Das Wort wird jetzt auf Band
2 kopiert und M0 wird simuliert. Falls M0 akzeptiert, akzeptiert auch M̃, und
umgekehrt.
Die Maschine M̃ akzeptiert ein Wort x ∈ Σ∗ genau dann, wenn M0 das Wort f (x)
akzeptiert, d.h., genau dann, wenn f (x) ∈ L0 gilt. Das ist äquivalent zu x ∈ L. Es
gilt also L = L(M̃ ). Für Eingaben der Länge n hält M nach höchstens q(n) Schritten
und beschriftet höchstens q(n) Felder. In q(n) Schritten kopieren wir das Wort auf
Band 2 und dann hält M0 in höchstens p(q(n)) Schritten. Die Zeitkomplexität von
M̃ ist also
2q(n) + p(q(n)).
Dieser Ausdruck ist ein Polynom, also gilt L(M̃) ∈ P.
Beispiel 4. 2-ERFÜLLBARKEIT kann in polynomialer Zeit auf STARKE KOMPONENTEN (Beispiel 2) reduziert werden; deswegen gehört 2-ERFÜLLBARKEIT
zu P. [Achtung: STARKE KOMPONENTEN ist ein Berechnungsproblem; das zugehörige Entscheidungsproblem, das in Wirklichkeit Ziel unserer Reduktion ist,
fragt, ob für einen gerichteten Graphen, dessen Knotenmenge V disjunkte Vereinigung zweier isomorpher Mengen V 0 und V 00 ist, und für eine Bijektion f : V 0 → V 00
die Knoten v 0 ∈ V 0 und f (v 0 ) ∈ V 00 immer in verschiedenen starken Komponenten
liegen.] Wir beschreiben die Reduktion.
Für jede Formel φ in konjunktiver Normalform mit 2 Literalen je Klausel konstruieren wir einen gerichteten Graphen Gφ wie folgt:
Knoten: für jede Variable x von φ hat Gφ zwei Knoten, markiert mit x und ¬x.
Kanten: für jede Klausel α ∨ β von φ gibt es zwei Kanten in G:
β
¬β
¬α
α
/•
/•
•
•
und
Beispiel: für die Formel
φ = (x ∨ y) ∧ (¬x ∨ z) ∧ (¬z ∨ ¬y)
haben wir den Graphen
! z
y
_@@ ? • @@ •
@@
@@
@@
@@
@ @
•
• ¬z
¬x • a
¬y
x•
Diese Konstruktion ist eine Reduktion in polynomialer Zeit, denn es gilt
146
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
1. φ ist erfüllbar genau dann, wenn x und ¬x in verschiedenen starken Komponenten von G liegen (für jede Variable x), und
2. die Funktion f , die jeder Formel φ den Graphen Gφ zuordnet, hat eine lineare
Zeitkomplexität.
Es ist klar, dass (2) gilt: falls φ eine Formel der Größe n (= Anzahl aller Variablen
+ Anzahl aller Klauseln) ist, benötigt die Konstruktion von Gφ die Zeit O(n). Wir
beweisen (1).
1. Sei φ erfüllbar. Wir haben also eine Belegung der Variablen, so dass jede
Klausel von φ den Wert true hat (d.h., für jede Klausel α ∨ β gilt α = true
oder β = true). Es folgt, dass von einem true Knoten in Gφ keine Kante
zu einem false Knoten führt. (Für die Kante ¬α → β gilt, falls ¬α = true,
dass β = true sein muss, denn α ∨ β ist eine Klausel von φ; analoges gilt für
¬β → α.) Falls die Variable x den Wert true hat, führt in Gφ also kein Weg
zu ¬x; falls x = false ist, führt kein Weg von ¬x zu x. In beiden Fällen liegen
x und ¬x in verschiedenen starken Komponenten.
2. Seien x und ¬x immer in verschiedenen starken
Komponenten. Wir erinnern an die obige Bemerkung 1: die starken Komponenten v der Knoten v des Graphen Gφ können so sortiert werden, dass für
jede Kante v → w von G ord(v) ≤ ord(w) gilt. Wir belegen die Variablen wie
folgt:
x = true genau dann, wenn ord(¬x) < ord(x)
(d.h., x hat genau dann den Wert true, wenn die starke Komponente von
¬x vor der starken Komponente von x liegt). Wir müssen beweisen, dass für
jede Klausel α ∨ β entweder α = true oder β = true gilt (denn dann gilt
φ = true).
Nehmen wir an, dass α = false, d.h.,
ord(α) ≤ ord(¬α),
dann beweisen wir β = true. Da Gφ die Kante ¬α → β enthält, gilt ord(¬α) ≤
ord(β) und da er auch die Kante ¬β → α enthält, gilt ord(¬β) ≤ ord(α). Also
ord(¬β) ≤ ord(α) ≤ ord(¬α) ≤ ord(β).
Damit ist bewiesen, dass
ord(¬β) < ord(β)
(denn die Komponenten ¬β und β sind wohl verschieden), also β = true.
Konkrete Beispiele: Die Formel oben ist erfüllbar, denn die starken Komponenten
des Graphen Gφ sind
{x, z, ¬y}
und
{¬x, y, ¬z}.
Die Formel
(y ∨ x) ∧ (¬y ∨ z) ∧ (¬z ∨ x) ∧ (¬x ∨ ¬t) ∧ (t ∨ ¬x)
ist nicht erfüllbar, denn der entsprechende Graph
6.4. ROBUSTHEIT DER KLASSE P
147
/ •z jj •t
x • _@vUUUU y? •
j
j
@@ UUUU
jjj
UUj
@@
Uj
Uj
UUUU
jj
j
@
j
j
UUUU
jjjj@
¬x •T tj ¬y • o
6 • ¬z * • ¬t
hat eine einzige starke Komponente.
Notation. Für zwei Sprachen L und L0 schreiben wir
L / L0
falls L auf L0 in polynomialer Zeit reduzierbar ist. (Das Zeichen / ist dem Zeichen
≤ ähnlich und deutet an, dass die Komplexität von L kleiner gleich der von L0 ist.)
Satz 2. Die Relation / ist transitiv: für Sprachen Li ⊆ Σ∗i (i = 1, 2, 3) gilt
L1 / L2 / L3 =⇒ L1 / L3 .
Beweis. Aus L1 / L2 folgt, dass eine Funktion f1 : Σ∗1 → Σ∗2 der Klasse FP
x ∈ L1 ⇐⇒ f1 (x) ∈ L2 erfüllt; aus L2 / L3 folgt, dass eine Funktion f2 : Σ∗2 → Σ∗3
der Klasse FP y ∈ L2 ⇐⇒ f2 (y) ∈ L3 erfüllt. Sei
h : Σ∗1 → Σ∗3 ,
h(x) = f2 (f1 (x))
die Verknüpfung von f1 und f2 . Es gilt
x ∈ L1 ⇐⇒ f1 (x) ∈ L2 ⇐⇒ h(x) = f2 (f1 (x)) ∈ L3 .
Also bleibt nur zu zeigen, dass h(x) in der Klasse FP liegt. In der Tat: die Funktion
fi (i = 1, 2) wird durch eine TM Mi in polynomialer Zeit pi (n) berechnet. Dann
wird die Funktion h(x) = f2 (f1 (x)) durch die folgende TM berechnet:
x
/ M1
f1 (x)
/ M2
/ f2 (f1 (x))
Für Wörter x der Länge n macht M1 höchstens p1 (n) Schritte und schreibt also
höchstens p1 (n) Symbole. Das Wort f1 (x) hat daher die Länge ≤ n + p1 (n). Dann
dauert die Berechnung von M2 höchstens p2 (n + p1 (n)) Schritte. Insgesamt braucht
die obige TM höchstens
p1 (n) + p2 (n + p1 (n))
Schritte, und das ist ein Polynom – also liegt h in FP.
Natürlich ist die Relation / reflexiv, aber sie ist nicht antisymmetrisch.
6.4
Robustheit der Klasse P
Die Definition der Klasse P war auf dem Modell von TM aufgebaut. Sie ist aber von
diesem Modell unabhängig, wie wir jetzt demonstrieren werden. Zuerst zeigen wir,
dass, falls verschiedene Modifikationen von TM benutzt worden wären, die Klasse
P dieselbe geblieben wäre. Die Zeitkomplexität ist für k-Band-TM genau wie oben
für TM definiert.
148
6.4.1
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
TM mit zusätzlichem Gedächtnis
Erinnern wir daran, dass eine TM mit zusätzlichem Gedächtnis die Möglichkeit
eines Zugriffs auf ein Gedächtnis hat, in dem Symbole eines endlichen Alphabets
A gespeichert werden, siehe 3.2.2. Dies ist allerdings eine normale“ TM mit der
”
Zustandsmenge Q × A. Für die Definition der Klasse P ist es also unerheblich, ob
wir TM oder TM mit zusätzlichem Gedächtnis als Berechnungsmodell anwenden.
6.4.2
TM mit mehrspurigem Band
Auch dieses Modell ändert die Klasse P nicht, denn wie in 3.2.3 gezeigt wurde, ist
eine TM mit k-spurigem Band eine normale“ TM mit dem Bandalphabet
”
Σ = (Σ1 ∪ {#}) × · · · × (Σk ∪ {#}) − {(#, . . . , #)}.
6.4.3
Mehr-Band TM
In 3.2.4 haben wir das Modell einer k-Band-TM eingeführt: die TM hat k Bänder
mit k unabhängigen Lese- und Schreibköpfen, aber mit einer Steuereinheit, die
aufgrund des gegebenen Zustandes und der k gelesenen Symbole die Aktivität der
k Köpfe steuert. Wir haben in 3.2.4 bewiesen, dass jede k-Band-TM durch eine TM
simuliert werden kann. Jetzt beweisen wir, dass dies in polynomialer Zeit möglich
ist:
Satz 1. Jede k-Band-TM mit einer Zeitkomplexität t(n) ≥ n kann durch eine 1Band-TM mit einer Zeitkomplexität O(t(n)2 ) simuliert werden.
Beweis. Wir führen den Beweis für k = 2 durch, der allgemeine Fall läßt sich ganz
analog durchführen. Wir gehen von der Simulation, die in Kapitel 3 (siehe 3.2.2)
beschrieben wurde, aus. Jeder Berechnungsschritt der Simulation hat drei Unterabschnitte. Abschnitt 1 (der Anfang) dauert einen Schritt, Abschnitt 2 (Kopfbewegung nach rechts oder links) benötigt höchstens O(t(n)) Schritte, denn der Kopf
wird unter das nächste Symbol ⇑ bewegt und in der Zeit t(n) kann die k-BandTM auf jedem Band höchstens O(t(n)) neue Felder beschreiben. Im Abschnitt 3
wird die Berechnung von Kopf i simuliert (in konstanter Zeit für i = 1, 2) und der
Kopf wird zwischen die beiden Symbole ⇑ (in O(t(n)) Schritten bewegt. Jeder Simulationsdurchgang dauert also höchstens O(t(n)) Schritte. Da wir höchstens t(n)
Durchgänge benötigen, hat die 1-Band-TM die Zeitkomplexität O(t(n)2 ).
Korollar 1. Jede Sprache, die von einer k-Band-TM mit polynomialer Zeitkomplexität akzeptiert wird, gehört zur Klasse P.
Beweis. Falls t(n) ein Polynom ist, ist auch t(n)2 ein Polynom.
Bemerkung 1. Mit anderen Worten würde die Klasse P die gleiche bleiben, falls
wir bei der Definition von P anstelle der TM die k-Band-TM benutzt hätten. Das
gilt auch für die Klasse FP.
6.4.4
RAM
In Kapitel 4 haben wir RAM als ein realistischeres Berechnungsmodell als TM eingeführt. Dann haben wir bewiesen, dass die Modelle RAM und TM die gleiche Leistung haben. Das gilt auch für die entsprechenden Klassen FP der in polynomialer
Zeit berechenbaren Funktionen. Zuerst müssen wir aber erklären, was Zeitkomplexität für RAMs bedeutet. Es gibt zwei Varianten:
6.4. ROBUSTHEIT DER KLASSE P
149
Uniforme Zeitkomplexität. Hierbei gilt analog zu TM, dass jede Durchführung
eines Befehls einem Schritt entspricht. Trotz der Analogie zu TM ist diese Variante nicht realistisch genug: ein Feld der RAM kann nämlich eine beliebig große
Zahl enthalten. Wir können z.B. die ganze Eingabe s1 . . . sn als eine (sehr große)
Zahl i codieren und i in einem Feld speichern – dann hat die Eingabe einfach die
Größe 1. Deshalb hat uniforme Zeitkomplexität nur geringere theoretische Bedeutung (obwohl sie manchmal benutzt wird mit der Voraussetzung, dass die Codierung
vernünftig“ durchgeführt wurde).
”
Logarithmische Zeitkomplexität zählt die Anzahl aller Ziffern, die die Operanden des Befehls berechnen. Also, falls in einem Feld eine Zahl n steht, hat n die
Größe
dig(n) = kleinste ganze Zahl größer oder gleich log n
(dig(n) ist die Zahl aller Ziffern von n.)
Jeder Befehl zählt als k+1 Schritte, wobei k die Summe der Größen“ der Operanden
”
ist. Z.B. der Befehl STORE i dauert
1 + dig(i) + dig(n) Schritte, wobei hR0i = n.
Und STORE ∗i dauert
1 + dig(i) + dig(n) + dig(m) Schritte, wobei hR0i = n und hRii = m.
Satz 2. Jede RAM mit logarithmischer Zeitkomplexität t(n) kann von einer MehrBand TM mit der Zeitkomplexität O(t(n)2 ) simuliert werden.
Beweis. In Satz 1 in 4.2 haben wir gezeigt, wie man eine RAM einem Programm
von p Zeilen von einer 6-Band-TM simulieren kann. Wir müssen nur beweisen, dass
diese TM die Zeitkomplexität O(t(n)2 ) hat.
Für jede Eingabe der Länge n dauert die Berechnung der RAM höchstens t(n)
Schritte, und es werden höchstens t(n) Befehle durchgeführt. Daraus folgt, dass
jedes Register eine Zahl mit O(t(n)) Ziffern enthält. Wir zeigen, dass jeder Befehl
in höchstens O(t(n)) Schritten mit der TM simuliert wird – daraus folgt, dass die
ganze Berechnung nur O(t(n)2 ) Schritte dauert. Es ist klar, dass auf jedem Band
der TM höchstens O(t(n)) Felder beschriftet werden.
Der Beweis, dass jeder Befehl in O(t(n)) Schritten simuliert wird, muß für alle
möglichen Befehle einzeln durchgeführt werden. Wir nehmen zur Illustration den
Fall
STORE ∗i
(detailliert im Beweis von Satz 1 in 4.2 beschrieben); die Zeitkomplexität der anderen Befehle läßt sich analog schätzen. Zuerst sucht der Kopf auf Band 2 die
Kombination
$ $ i $ j $ $.
Da auf Band 2 höchstens O(t(n)) Felder beschriftet worden sind, dauert die Suche
höchstens O(t(n)) Schritte. Dann schreibt die TM die Zahl j auf Band 5, dazu
werden auch O(t(n)) Schritte benötigt, denn j hat O(t(n)) Ziffern. Da 3t(n) =
O(t(n)), sehen wir, dass STORE ∗i in O(t(n)) Schritten simuliert wird.
Korollar 2. Jede RAM mit polynomialer logarithmischer Zeitkomplexität berechnet
eine Funktion der Klasse FP.
Beweis. In der Tat wird eine RAM, falls sie die Zeitkomplexität t(n) hat, wobei
t(n) ein Polynom ist, von einer Mehr-Band-TM mit der Zeitkomplexität O(t(n)2 )
150
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
simuliert und diese wird wiederum von einer Turingmaschine M mit der Zeitkomplexität O(n2 + (t(n))4 ) simuliert. Dann berechnet M dieselbe Funktion wie die
RAM, und da n2 + t(n)4 ein Polynom ist, folgt daraus, dass die Funktion zu FP
gehört.
Schlußbemerkung: Die Klasse P ist unabhängig von unserer Wahl des Berechnungsmodells: wir konnten, statt TM, eine beliebige deterministische Variante von TM
nehmen, um dieselbe Klasse zu beschreiben. Auch RAM, obwohl es ein viel stärkeres Modell ist, ergibt für Zahlenfunktionen keine größere Klasse von Funktionen,
die polynomiale Zeitkomplexität haben, als die Klasse FP.
6.5
Geometrische Algorithmen und reelle RAM
Viele Algorithmen, speziell in der Computer-Graphik, arbeiten mit geometrischen
Objekten in der Ebene oder im Raum, und für ihre Komplexität wird ein modifiziertes Berechnungsmodell benutzt: RAM, die mit reellen Zahlen arbeitet.
Reelle RAM ist genau wie RAM (siehe 4.1) definiert, nur enthält jedes Register
und jedes Feld des Ein- und Ausgabebandes eine reelle Zahl. Auch die Liste aller
Operationen ist gleich (zum Beispiel LOAD i, LOAD ∗i, LOAD !i für eine beliebige
natürliche Zahl i), aber die Operanden von ADD sind reelle Zahlen.
Wie in Kapitel 4 gezeigt wurde, sind weitere Operationen (für RAM oder reelle
RAM) einfach zu programmieren, zum Beispiel die Multiplikation von zwei Zahlen.
Wir nehmen ferner an, dass Multiplikation und Division an einer reellen RAM so
programmiert werden, dass sie in O(1) Schritten durchgeführt werden.
Für die uniforme Komplexität im Fall der reellen RAM definieren wir die Größe
der reellen Zahl x = n10−m als dig(n) + dig(m).
Beispiel 1 (LINIE). Eingabe: Punkte a, b und r der Ebene, a 6= b
Ausgabe: JA, falls r auf der Linie L(a, b), von a und b bestimmt, liegt.
Falls ( )x und ( )y die x- und y-Koordinaten bezeichnen, ist die Antwort genau dann
JA, wenn
bx − a x
rx − a x
=
ry − a y
by − a y
(im Fall ry 6= ay und by 6= ay ) oder ganz allgemein: genau wenn
(rx − ax )(by − ay ) = (bx − ax )(ry − ay ).
Diese Entscheidung dauert nur O(1) Schritte auf einer reellen RAM.
Beispiel 2 (ÜBER DER LINIE). Eingabe: Punkte a, b und r in der Ebene mit
ax 6= bx
Ausgabe: JA, falls r über der Linie L(a, b) liegt.
b
oo
o
•
o
ooo
ooo
o
o
oo
ooo
o
o
•
ooa
OOO
r
•O
•
a OOOOO
OOO
OOO
OOO b
O•OO
r über L(a, b), mit k > 0
r über L(a, b), mit k < 0
r
•
6.5. GEOMETRISCHE ALGORITHMEN UND REELLE RAM
151
Falls die Linie L(a, b) die Gleichung y = kx + q hat, liegt r genau dann über dieser
Linie, wenn
ry > krx + q.
Auch diese Entscheidung dauert O(1) Schritte.
Beispiel 3 (DAS INNERE EINES POLYGONS). Eingabe: Ein konvexes Polygon
P und ein Punkt r.
Ausgabe: Entscheidung, ob r im Inneren von P liegt.
Bemerkung 1. Ein Polygon P ist eine Liste von Punkten, die als die Ecken von
P bezeichnet werden. Ein Polygon P = (v0 , v1 , . . . , vn−1 ) heißt simple, falls sich die
Strecken L(vi , vi+1 ) (wobei i + 1 modulo n berechnet wird) nur in den erwarteten“
”
Ecken schneiden, d.h., der Durchschnitt von L(vi , vi+1 ) und L(vj , vj+1 ) mit i 6=
j ist vi , falls j + 1 = i, oder vj , falls i + 1 = j, und ansonsten leer. Falls wir
aus der Ebene die Strecken eines simplen Polygons P entfernen, erhalten wir zwei
zusammenhängende Teile, einen gebundenen, der das Innere von P genannt wird,
und einen weiteren, der als das Äußere von P bezeichnet wird.
Ein simples Polygon P heißt konvex , falls sein Inneres jede Strecke enthält, deren
Endpunkte es enthält. Beispiele:
•H
HHHH
HH
HH
•
•//
//
//
//
//
//
•
j
j
/ jjjj
•jj
Konvexes Polygon
•FF
FFFF
FF
F
•
•11
11
11
• RRRRR 11
R
11 •
1 •
Nichtkonvexes Polygon
•H
}} HHHH
}
HH
}}
HH
}}
}
•
}
\\
\\
\\\\\\\\\\ •
•
rrr
rrr •G
GG GG •
Nichtsimples Polygon
Ein konvexes Polygon wird als eine Liste v0 , v1 , . . . , vn−1 von Punkten angegeben,
wobei wir annehmen, dass die Orientierung im Uhrzeigersinn erfolgt und keine zwei
benachbarten Ecken auf der gleichen Linie liegen:
v1
•XXXXXX
w
•++ v2
www
w
v0 •
++
•
·
vn−1 •F
·
FF
F aaaaa ·
•
•
vn−2
Um unseren Algorithmus zu vereinfachen, nehmen wir zusätzlich an, dass die xKoordinaten der Punkte v0 , . . . , vn−1 voneinander verschieden sind.
Algorithmus für das INNERE EINES POLYGONS
1. Wir wählen einen Punkt p im Inneren von P .
2. Die Halblinien von p zu den Ecken v0 , . . . , vn−1 teilen die Ebene in n Sektoren.
Wir bestimmen den Sektor, in dem sich der gegebene Punkt r befindet, in
O(log n) Schritten wie folgt.
152
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
'
'
v0 'U
• UUUUUUv1 k k
U k
'
k •k
Dp k _ _ _•;_; _ _•'k
D vi+1 ;;
D
;; ;eeeeee•D
D
•
• v
D
a
i
Wir suchen also i0 = 0, . . . , n − 1, so dass r im Sektor (vi0 , p, vi0 +1 ) liegt (hier
wird i0 + 1 modulo n berechnet, d.h., (n − 1) + 1 = 0). Wir wenden binäres
Suchen an: falls wir, für jedes i = 0, . . . , n − 1, in konstanter Schrittzahl O(1)
entscheiden, ob i0 kleiner, gleich oder größer als i ist, berechnen wir i0 in
O(log n) Schritten. Falls r rechts von p liegt (rx ≥ px ) brauchen wir nur die
Ecken rechts von p betrachten. Sei also vi eine solche Ecke:
y
y
y
y
y
v i0 y
•y/
y ///
r
•
y
//
e
y
/ e e e e e
y
e
e
•
y
e e v
y Oe e
e
i0 +1
•O
OO
OO
•
vi O O O
OO
Falls r über L(p, vi ) liegt, gilt i0 > i. Falls r unter L(p, vi ), aber über L(p, vi+1 )
liegt, gilt i0 = i . Und falls r unter L(p, vi+1 ) liegt, gilt i0 < i. Diese Entscheidung benötigt eine konstante Zahl von Schritten. Analoges gilt für a links von
p (rx ≤ px ).
3. Falls der Sektor (vi , p, vi+1 ), in dem r liegt, berechnet worden ist, gilt: r liegt
genau dann im Inneren des Polygons P , wenn es im Inneren des Dreiecks
(vi , p, vi+1 ) liegt. Dies bestimmen wir in konstanter Zahl O(1) von Schritten.
(Sei αx + βy + γ = 0 die Gleichung der Linie L(vi , vi+1 ). Dann liegt r genau
dann im Inneren des Dreiecks, wenn αx + βy + γ dieselben Zeichen für die
Koordinaten von r und p hat.)
Zeitkomplexität Der Algorithmus wird in
O(1) + O(log n) + O(1) = O(log n)
Schritten durchgeführt.
Beispiel 4 (KONVEXE HÜLLE). Eingabe: Punkte v1 , . . . , vn in der Ebene mit
paarweise verschiedenen x-Koordinaten.
Ausgabe: Konvexe Hülle, d.h., das kleinste Polygon, das alle Punkte enthält.
Bemerkung 2. Jede Ecke der konvexen Hülle ist einer der gegebenen Punkte.
Das kann man sich leicht am Gummiband-Modell klarmachen: stellen wir uns ein
elastisches Gummiband vor, das so gestreckt wird, dass es alle gegebenen Punkte
enthält, und anschließend losgelassen wird. Es formt dann die konvexe Hülle.
6.5. GEOMETRISCHE ALGORITHMEN UND REELLE RAM
153
Die Ausgabe des folgenden Algorithmus ist also eine Liste mit Punkten vi (für einige
i = 1, . . . , n), die die konvexe Hülle, im Uhrzeigersinn orientiert, repräsentiert.
Algorithmus für die KONVEXE HÜLLE
1. Sortieren
Wir sortieren die gegebenen Punkte nach ihren x-Koordinaten. Weiter nehmen
wir also an, dass vi für alle i = 1, . . . , n links von vi+1 steht.
2. Berechnung der oberen Hülle
Der Punkt v1 liegt links von allen anderen Punkten und der Punkt vn liegt
rechts – also sind v1 und vn bestimmt in der konvexen Hülle enthalten. Die
konvexe Hülle besteht aus (a) einer Liste mit Punkten von v1 zu vn , die wir
die obere Hülle nennen und (b) einer Liste mit Punkten von vn zu v1 , der
unteren Hülle.
In dem folgenden Beispiel
v8
f
f
•TTTTT
f
f
fff
TTTT
v4 fffffffff
TTTT v12
•
obere Hülle
•//
v6
//
•
//
v10
// v
•
14 a a a a a
v
va1 &a• a2 a a a a• av5 a a a a a a a a a a• a a
a
a
a
•
a a a
&&
&&
•
&&
v7
untere Hülle
&&
•
&&
v11 nnn•
v13
n
•XXXXXXX
nnn
XXXXX
n
n
v3
XXXXX nnnn
X•n
v9
ist die obere Hülle
v1 , v4 , v8 , v12 , v14
und die untere Hülle ist
v14 , v13 , v9 , v3 , v1 .
Die Berechnung der oberen Hülle verfolgt die folgende divide-and-conquer
Strategie:
2a Die Punkte v1 , . . . , vn werden in zwei ungefähr gleich große Teile aufgeteilt.
Nehmen wir an, dass n gerade ist, dann arbeiten wir mit der linken Hälf”
te“ v1, . . . , vn/2 und der rechten Hälfte“ vn/2+1 , . . . , vn . Für beide Hälften
”
bestimmen wir rekursiv die obere Hülle.
154
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
q j0
p i0
_ _ _ _ _ _jj_•L_L _ _ _ _ _ _ _ _ _ _ _ _ _ _ j_j•_LL_ _ _ _ _ _
j
j
LLL .
LLL .
.
.
jj
jj
L ..
L ..
. . •jjjj
. . •jjjj
•**
•**
**
**
**
**
•
•
p2 •
q
•
•
2
•))
•))
•
))
))
))
))
•
•
)
)
•
•
• p s q1 •
v1 = p 1
qt = v n
obere Hülle für v1 , . . . , vn/2
obere Hülle für vn/2+1 , . . . , vn
Wir bezeichnen die obere Hülle von v1 , . . . , vn/2 mit
p1 , p2 , . . . , ps
und die obere Hülle für vn/2+1 , . . . , vn mit
q1 , q2 , . . . , qt .
2b Wir berechnen die obere Tangente der beiden gefundenen oberen Hüllen: das
ist das Segment L(pi0 , qj0 ), so dass alle Punkte p1 , . . . , ps , q1 , . . . , qt unter ihm
liegen.
2c Die obere Hülle der Punkte v1 , . . . , vn ist
p1 , p2 , . . . , pi0 , qj0 , qj0 +1 , . . . , qt .
3. Berechnung der unteren Hülle
Dies geschieht analog zu (2).
4. Die konvexe Hülle ergibt sich aus der oberen Hülle gefolgt von der unteren
Hülle.
Zeitkomplexität: Schritt (1) hat die Zeitkomplexität O(n log n). Wir zeigen jetzt,
dass auch Schritt (2) diese Zeitkomplexität hat; analoges gilt für Schritt (3). Da
(4) in n Zeiteinheiten geschrieben werden kann, ist damit bewiesen, dass der ganze
Algorithmus die Zeitkomplexität
O(n log n)
hat. Wir zeigen später, dass dies optimal ist.
Zeitkomplexität von Schritt (2): Sie hängt von der Zeitkomplexität von (2b) ab.
Wir zeigen, dass die obere Tangente in O(log n) Schritten gefunden werden kann.
Dann folgt, falls Schritt (2) in t(n) Zeiteinheiten berechnet wird, dass die Schritte
(2a) - (2c) die folgende Zeitkomplexität haben:
(2a)
(2b)
(2c)
2t( n2 )
O(log n)
O(n)
Zeiteinheiten
Zeiteinheiten
Zeiteinheiten
Es gibt also Konstanten n0 und K, so dass
n
für alle n ≥ n0 gilt t(n) ≤ 2t( ) + K.
2
6.5. GEOMETRISCHE ALGORITHMEN UND REELLE RAM
155
Da die Gleichung t(n) = 2t( n2 ) + K · n die Lösung t(n) = K · n · log n hat, ist damit
bewiesen, dass Schritt 2 die Zeitkomplexität O(n log n) hat.
Wie wird die obere Tangente berechnet? Wir zeigen zuerst, wie man für jeden
Punkt pi (i = 1, . . . , s) in der Zeit O(log t) die obere Tangente von pi zu den Punkten
q1 , . . . , qt berechnet, also wie man den Index j(i) findet, so dass alle Punkte q1 , . . . , qs
unter der Linie L(pi , qj(i) ) liegen.
qq
q
q
qq
q
j•:
qjjqjjjj :::
q
j
j
::
j
ii•QQQQQ
q•jqj
::
iiii
Q
i
i
q
Q
q
:
•
j(i)
q
•,,
q
•((
qj+1
,
q
•
,,
q
((
q
, q
((
•
q' \ \ \ \ \ pi •\
((
''
•\ \ \ \ \ \ \ \ \
qj
((
''
'
(
•
• qj−1
•
•
Das können wir in der Zeit O(log t) durch binäres Suchen zwischen j = 1, . . . , t
berechnen, falls wir für jedes j in konstanter Zeit O(1) bestimmen, ob j(i) größer,
gleich oder kleiner als j ist. In der Tat:
• falls qj−1 und qj+1 unter L(pi , qj ) liegen gilt j = j(i),
• falls qj−1 über L(pi , qj ) liegt gilt j > j(i),
• falls qj+1 über L(pi , qj ) liegt gilt j < j(i).
Analog kann man zeigen, dass in der Zeit O(log n) die globale obere Tangente
L(pi0 , qj0 ) berechnet werden kann. Hier müssen wir für jedes Paar (i, j) entscheiden,
welcher der 9 Fälle (i = i0 , j = j0 oder i = i0 , j < j0 usw.) zutrifft. Jetzt bestimmen
wir i0 durch binäres Suchen zwischen i = 1, . . . , s: für jedes i benötigen wir die Zeit
O(log t), um j(i) zu berechnen, und dann nur konstante Zeit, um zu entscheiden,
ob i0 größer, gleich oder kleiner als i ist:
q j0
e e
e e e
e
R
e
•
R
e e e RRRRR
e e e
•//
p i0 e e e e e
//
e
e
O
•
l
O
//
q• q
OOO
lll
q
l
j(i)
/
l
l
q l
,
•
l
q
•&&
•
,
p
i+1
q
•
,,
q
&&
q
,
pi q
&&
•
$
q
• &&
•
$
q
$$
q
&&
$$
•
•
•
pi−1 •$
$
•
•
• falls pi−1 und pi+1 unter L(pi , qj(i) ) liegen, gilt i = i0 ,
• falls pi−1 über L(pi , qj(i) ) liegt, gilt i < i0 ,
• falls pi+1 über L(pi , qj(i) ) liegt, gilt i > i0 .
156
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Daraus folgt, dass wir mit binärem Suchen i0 in der Zeit
O((log t)(log s)) = O(log(t + s)) = O(log n)
finden können. Es gilt j0 = j(i0 ).
Bemerkung 3. Der obige Algorithmus für die KONVEXE HÜLLE ist optimal. Wir
können nämlich SORTIEREN auf KONVEXE HÜLLE in linearer Zeit reduzieren
– deshalb kann kein Algorithmus schneller als Ω(n log n) sein.
In der Tat formen wir mit gegebenen Zahlen x1 , . . . , xn in linearer Zeit die n Punkte
v1 , . . . , vn der Kurve y = x2 mit den gegebenen x-Koordinaten:
y = x2
x3
x1
x4 x2
Da die Kurve y = x2 konvex ist, enthält die konvexe Hülle der Punkte v1 , . . . , vn
jeden dieser Punkte. Also antwortet jeder Algorithmus A, der das Problem KONVEXE HÜLLE löst, auf die Eingabe v1 , . . . , vn mit der Ausgabe vi1 , vi2 , . . . , vin , die
eine Orientierung der gegebenen Punkte im Uhrzeigersinn repräsentiert. Sei k der
Index, für den vik der letzte Punkt (nach rechts) ist, dann gilt
xik > xik+1 > · · · > xin > xi1 > xi2 > · · · > xik−1
Wir können k in linearer Zeit O(n) bestimmen und also in der Zeit n + t(n) + n
sortieren, wobei t(n) die Zeit ist, die A benötigt, um die konvexe Hülle zu berechnen.
Es gilt also t(n) = Ω(n log n).
Beispiel 5 (PLANARE 3-FÄRBBARKEIT). Eingabe: Ein planarer Graph (das
heißt, ein Graph, dessen Knoten Punkte der Ebene sind, und dessen Kanten Linien
sind, die sich nur in den Knoten schneiden).
Ausgabe: Entscheidung, ob der Graph mit drei Farben gefärbt werde kann.
Bemerkung 4.
1. Wir wissen, dass für Graphen im allgemeinen 2-FÄRBBARKEIT leicht“ und 3-FÄRBBARKEIT sehr schwierig“ ist, wie genau später
”
”
bewiesen wird. Es folgt, dass zum Beispiel 4-FÄRBBARKEIT auch sehr
”
schwierig“ sein muß: eine triviale Reduktion
3-FÄRBBARKEIT / 4-FÄRBBARKEIT
6.5. GEOMETRISCHE ALGORITHMEN UND REELLE RAM
157
erfolgt, wenn zu dem gegebenen Graphen G ein neuer Knoten a hinzugefügt
und mit allen alten Knoten verbunden wird. Der neue Graph G ist genau dann
a
•$*7$*7
$$ **77
$$ ** 777
$$ ** 77
•2 ** 77
222** •
22** •2 22 2 G
fff•
2f
• ff
xyz{
~}|
Graph G
4-färbbar, wenn G 3-färbbar ist (denn a muß eine andere Farbe haben als
jeder Knoten x 6= a). Und die Konstruktion von G verlangt nur lineare Zeit.
2. Für planare Graphen ist 2-FÄRBBARKEIT leicht“ (denn das gilt für alle
”
Graphen) und 4-FÄRBBARKEIT noch leichter: nach dem berühmten Satz ist
jeder planare Graph 4-färbbar! Um so erstaunlicher ist die folgende Reduktion,
die zeigt, dass PLANARE 3-FÄRBBARKEIT mindestens so schwierig ist wie
allgemeine 3-FÄRBBARKEIT:
Reduktion: 3-FÄRBBARKEIT / PLANARE 3-FÄRBBARKEIT
Eingabe: ein beliebiger Graph G.
Den können wir immer in polynomialer Zeit in der Ebene repräsentieren (ohne zu
verlangen, dass die Kanten sich nicht überschneiden). Genauer:
1. für die n Knoten von G wählen wir (beliebig) n verschiedene Punkte der Ebene
und
2. die Kante (u, v) von G wird durch eine Linie von Punkt u nach v repräsentiert,
so dass kein Knoten außer u, v auf der Linie liegt, und falls sich zwei Linien
außer einem Knoten schneiden, liegt der Schnittpunkt auf keiner weiteren
Linie des Graphen.
Ein Beispiel einer solchen Repräsentation ist im Bild 6.1 gezeigt.
Ausgabe: ein planarer Graph G∗ , der genau dann 3-färbbar ist, wenn G 3-färbbar
ist.
Für die Konstruktion des Graphen G∗ benutzen wir den Hilfsgraphen H in Abbildung 6.2.
Dieser Graph ist 3-färbbar, Abbildung 6.3 zeigt drei Beispiele von Färbungen mit
den Farben 1, 2, 3.
Lemma 1. Jede 3-Färbung von H färbt N und S mit denselben Farben, analog für
O und W .
Beweis. Nehmen wir an, dass N mit 1 und S mit 2 gefärbt wird. Wie wird der
Mittelpunkt M gefärbt?
Farbe 1: wählt man für die vertikalen Nachbarn von M die Farben 2 (oben) und 3
(unten), dann bleibt für die horizontalen Nachbarn keine Farbe übrig (Bild (6.4a)).
Färbt man dagegen beide vertikalen Nachbarn mit Farbe 3, so muß der rechte
horizontale Nachbar die Farbe 2 erhalten, während der Knoten zwischen S und O
die Farbe 1 erhalten muß. Dies erzwingt die Farbe 2 für den Knoten O. Aber nun
kann der Knoten zwischen N und O nicht mehr gefärbt werden (Bild (6.4b)).
158
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
(6.1a) Adjazenzmatrix
(6.1b) Erste Repräsentation
(6.1c) Zweite Repräsentation
0
0
0
1
1
1
0
0
0
1
1
1
0
0
0
1
1
1
1
1
1
0
0
0
1
1
1
0
0
0
•?O?OO •?? oo•
??OOO o?o?o
o?o?o?oOoOOO?O??
o
? OO?
o
•o
•
•
1
1
1
0
0
0
•
•??
???
??
•
•
•
•
Abbildung 6.1: Zwei Repräsentationen eines (nichtplanaren) Graphen
N
•??
???
??
•
•
?
•???
??
???
??
??
?O
?
M
W
•??
•??
•
•
•
??
??
??
??
?
??
•
•??
•
??
??
??
•
S
Abbildung 6.2: Graph H
1
•???
?
2 3 ???3
• •?? • ?
??? ???
?
1 2 1
•?? •?? • • •
?? ??? 2 1
?? ?
•? • •
3 ??3? 2
?
•
(6.3a)
1
2
•???
?
3 1 ???3
• •?? • ?
??? ???
?
1 2 3
•?? •?? • • •
?? ??? 2 1
?? ?
•? • •
3 ??1? 3
?
•
(6.3b)
2
3
•???
?
2 1 ???2
• •?? • ?
??? ???
?
1 3 2
•?? •?? • • •
?? ??? 3 1
?? ?
•? • •
2 ??1? 2
?
•
(6.3c)
3
Abbildung 6.3: 3-Färbungen von H
Farbe 2 entfällt aus demselben Grund.
Farbe 3 - hier haben die vertikalen Nachbarn von M die Farben 2, 1 (Bild (6.4b),
was für die horizontalen Nachbarn keine Farbe übrigläßt.
Konstruktion von Graphen G∗ Gegeben ist ein Graph G, repräsentiert durch Punkte und Linien in der Ebene. Auf jeder Kante (u, v), die durch andere Kanten geschnitten wird (Bild 6.5a) füge neue Knoten hinzu, von u aus hinter jedem Schnittpunkt, wie in Bild 6.5b angedeutet; der letzte erhält das Label O. Für die Linien
6.5. GEOMETRISCHE ALGORITHMEN UND REELLE RAM
1
•???
2 ??
• •?? •???
? ?
? 1 ??? ??
•
?? •?? • • •
?? ??? ?
?? ?
•?? • •
?3?
?
•
(6.4a)
2
1
•???
3 ?? ?
• •?? •???
? ?
1 ??? ??
• • •
?? •?
•
?? ???? 2 3
?? ?
•?? • •
?3? 1
?
•
(6.4b)
2
159
1
•???
2 ??
• •?? •???
?? ??
? •? 3 • ??• ?•
•?
?? ??
?? ??? ?
•??? • •
?1?
?
•
(6.4c)
2
Abbildung 6.4: Färbungsversuche des Graphen H
von u0 nach v 0 , die (u, v) schneiden, wird jeweils ein Knoten mit dem Label S hinzugefügt, von u0 aus hinter dem Schnitt mit (u, v).
(6.5a)
u
•
v
•
v
•
v
•
u0
(6.5b)
u•
u0
•
•
•
O
•
S
v
0
•
•
•
u0
S
v
0
O
•
•
•
•
S
O
•
v0
•??
•??
•??
???
???
???
??
??
??
(6.5c)
?
?
?
?
?
?
•?
O • ?=
O •
O • ?=
?? W
?? W
u = W ???
??
??
??
??
??
?
•
•
•
Abbildung 6.5: Konstruktion von G∗
Daraufhin werden die Überschneidungen durch eine Kette von Hilfsgraphen H,
verbunden an den Knoten O bzw. W , ersetzt, wie in Bild 6.5c angedeutet. Konkretes
Beispiel: für den Graphen in 6.1c) haben wir erst den folgenden Graphen
160
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
•
•
•??
???
??
??
??
??
??
u
•
•
•
•
S
v
N
•
W
und dann den planaren Graphen G∗
v
7
•
• 77
77
77
77
77
77
7
u V=V O
• 11 VVVV 777 •
V
•1 VV 7 1
q•11VVV 11 VqVq• N
q 1 VV q • q 11 qqq•q
qq•q11 qq•q1VqVVV 11 qq•
q
1 V q
•VqVVVV1V •111 S
•VVVVV1 •
•
W
Eigenschaften von G∗
1. G∗ ist planar. In der Tat, alle Schnittpunkte von Linien wurden durch Kopien
von H überbrückt und es entstehen keine neuen.
2. Falls G∗ 3-färbbar ist, ist auch G 3-färbbar. Man benutzt dieselben Farben
der Knoten wie in G∗ . Falls eine Linie (u, v) von G keinen Schnittpunkt in
G aufweist, dann ist (u, v) auch eine Linie von G∗ und deswegen haben u, v
verschiedene Farben. Andernfalls schneidet (u, v) andere Linien, was wie in
Bild 6.5 durch H eliminiert wird. Dann hat u(= W ) dieselbe Farbe wie jeder
O-Knoten von 6.5b, siehe Lemma oben. Da v und der benachbarte O-Knoten
von G∗ verschiedene Farben haben, sind auch die Farben von u und v verschieden. Ganz analog verfährt man mit Linien (u0 , v 0 ), die (u, v) schneiden:
u0 hat dieselbe Farbe wie S, die sich von der Farbe von v 0 unterscheiden muß
(dies gilt auch, wenn eine entlang der Knoten N und S verbundene Kette von
Kopien von H entlang von (u0 , v 0 ) auftritt.
3. Falls G 3-färbbar ist, ist auch G∗ 3-färbbar. Wir färben in G∗ erst die alten“
”
Knoten von G mit den Farben 1, 2, 3. Danach werden für eine G-Kante (u, v)
in 6.5b alle O-Knoten mit denselben Farben wie u gefärbt. Als letztes färben
wir die Knoten des angeklebten Graphen H wie folgt.
Die Farbe von 0 und W ist schon gegeben, zum Beispiel Farbe 1. Die anderen
Farben hängen von der Färbung des Anfangsknotens u0 = N der Linie (u0 , v 0 )
ab, deren Überbrückung H präsentiert (Bild 6.6).
6.6. KOMPLEXITÄTSKLASSE N P
u0
•??? 1•??? •???
u?
?
? ?
?1
•??
•?
•?
•
1 ?? 1 ??11 ??
•
•
•
(6.6a)
3•
•
v
v0
161
u0
•??? 2•??? •???
u?
?
? ?
?1
•?
•??
•?
•
1 ?? 1 ??21 ??
•
•
•
(6.6b)
3•
•
v
v0
Abbildung 6.6: Färbung einer Kopie des Graphen H
(a) Falls u0 Farbe 1 hat (siehe 6.6a), benutzen wir die Färbung von Bild 6.3a.
(b) Falls u0 die Farbe 2 oder 3 hat, (siehe 6.6b), benutzen wir die Färbung
von Bild 6.3b bzw. 6.3c.
4. Die Konstruktion von G∗ aus G dauert O(k 2 ) Schritte, wobei k die Zahl
aller Kanten von G ist (falls G schon in der Ebene repräsentiert wird, was
auch in polynomialer Zeit durchgeführt wird). In der Tat müssen wir für
jede Kante höchstens k Schneidungen überbrücken, und das dauert (da eine
Überbrückung in konstanter Zeit O(1) durchgeführt wird) O(k) Schritte pro
Kante.
6.6
Komplexitätsklasse N P
Probleme, die grundsätzlich schwieriger zu lösen sind als die der Klasse P, die sich
aber trotzdem in polynomialer Zeit von einer nichtdeterministischen TM lösen lassen, formen die Komplexitätsklasse N P. Intuitiv kann man N P wie folgt erklären:
falls ein Entscheidungsproblem die Eigenschaft hat, dass man in polynomialer Zeit
überprüfen kann, ob eine angebotene“ Lösung wirklich die Aufgabe löst, gehört
”
das Problem zu N P. Bevor wir N P formal definieren, zeigen wir diese intuitive
Erklärung an einem Beispiel.
Beispiel 1 (ZERLEGBARKEIT). Wir sollen entscheiden, ob für eine Zahl n (Eingabe) eine Zerlegung in ein Produkt n = pq zweier kleinerer Zahlen existiert. Obwohl
das ein Problem ist, dass in der Mathematik seit tausenden von Jahren behandelt
wurde, gibt es keinen effizienten Algorithmus dafür. Wir wissen also nicht, ob ZERLEGBARKEIT zu P gehört. Aber dieses Problem gehört offensichtlich zu N P:
falls uns jemand Zahlen p und q nennt, können wir effizient überprüfen, ob sie eine
Lösung bilden, d.h., ob das Produkt pq der Eingabe gleicht.
Das letzte kann mit einer nichtdeterministischen TM wie folgt gelöst werden: Band 1
ist das Eingabeband. Auf Band 2 wird nichtdeterministisch eine Zahl p geschrieben
und auf Band 3 nichtdeterministisch eine Zahl q. Die NTM multipliziert p mit q und
vergleicht pq mit Band 1: falls pq auf Band 1 steht, hält die NTM und akzeptiert,
falls nicht, hält sie und akzeptiert nicht. Für jede Zahl n, die zerlegbar ist, gibt es
eine Berechnung, die n in linearer Zeit akzeptiert.
Definition. Wir sagen, dass eine nichtdeterministische Turingmaschine M die
Zeitkomplexität p(n) hat, falls es für jede Eingabe der Länge n, die M akzeptiert, eine akzeptierende Berechnung gibt, die höchstens p(n) Berechnungsschritte
benötigt.
Mit N P bezeichnen wir die Klasse aller Sprachen (oder Entscheidungsprobleme), die
von einer NTM mit polynomialer Zeitkomplexität akzeptiert (oder gelöst) werden
können. Genauer: eine Sprache L gehört zu N P, falls es eine NTM und ein Polynom
p(n) gibt, so dass die NTM die Zeitkomplexität p(n) hat und L akzeptiert.
162
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Beispiel 2.
1. Jedes Problem der Klasse P gehört zu N P.
2. ZERLEGBARKEIT ist ein Problem der Klasse N P; es ist nicht bekannt, ob
es zur Klasse P gehört.
3. ERFÜLLBARKEIT (siehe Beispiel 5 in 6.2) ist ein Problem der Klasse N P:
für jede Boolesche Formel f (x1 , . . . , xn ) und jede potentielle Lösung“, d.h.
”
jede (beliebig berechnete) Belegung aller Variablen x1 , . . . , xn , können wir
effizient entscheiden, ob der Wert von f true oder false ist. Es ist einfach,
eine NTM mit polynomialer Zeitkomplexität zu konstruieren, die das Problem
ERFÜLLBARKEIT löst: Band 1 ist ein Eingabeband, auf dem ein Code der
Formel f (x1 , . . . , xn ) gespeichert wird. Auf Band 2 erzeugt die NTM nichtdeterministisch n Werte 0 oder 1. Dann berechnet sie den Wert von f mit diesen
n Variablenwerten (mit 1 = true und 0 = false).
4. TRAVELING SALESMAN PROBLEM (TSP) ist ein Problem der Klasse
N P mit großer praktischer Relevanz. Die Eingabe ist eine Liste S1 , . . . , Sn
von Städten und eine Matrix von Zahlen
d(i, j) ≥ 0 für i, j = 1, . . . , n
die die Distanz von Si zu Sj repräsentieren (oder die Kosten der Reise von
Si nach Sj ). Die Aufgabe ist, zu entscheiden, ob alle Städte besucht werden
können, ohne dass die gesamten Kosten eine gegebene Zahl k überschreiten.
Das heißt: die Eingabe besteht aus Zahlen k und dij für i, j = 1, . . . , n. Die
Lösung ist eine Rundfahrt, d.h. eine Permutation (i1 , i2 , . . . , in ) der Zahlen
1, . . . , n, so dass
d(i1 , i2 ) + d(i2 , i3 ) + · · · + d(in−1 , in ) + d(in , i1 ) ≤ k.
(∗)
Auch für dieses Problem gibt es keinen effizienten Algorithmus. Aber das
Problem gehört sicher zu N P: falls eine Permutation gegeben wird, benötigt
die Überprüfung der Ungleichung (∗) nur lineare Zeit.
Satz 1. Jede NTM mit der Zeitkomplexität p(n) kann von einer TM mit der Zeitkomplexität
O(K p(n) )
wobei K eine Konstante ist
simuliert werden.
Beweis. Im Beweis des Satzes 1 in 3.4 haben wir eine Simulation einer nichtdeterministischen Turingmaschine M durch eine deterministische 3-Band Turingmaschine
M gezeigt. Wir beweisen, dass M die Zeitkomplexität O(r2p(n) ) für eine Konstante
r hat, falls M die Zeitkomplexität p(n) hat. Danach simulieren wir M mit einer
(1-Band) TM, deren Komplexität O(n2 + (r2p(n) )2 ) ist, siehe Satz 1 in 6.4. Da
(r2p(n) )2 = r4p(n) , setzen wir K = r 4 : die Funktion n2 + r4p(n) gehört zu O(K p(n) ).
Sei, wie im Beweis des Satzes 1 in 3.4, eine Numerierung der Übergänge (q, s) →
(qi , si ) für i = 1, . . . , r gegeben. Für jede Eingabe der Länge n brauchen wir nur die
ersten p(n) Berechnungsschritte der Maschine M zu simulieren. Die Maschine M
erzeugt systematisch alle Listen aus Zahlen
i1 i2 . . . i k
mit k ≤ p(n) (und 1 ≤ is ≤ r für s = 1, . . . , k)
auf Band 2 – die Anzahl dieser Listen ist
r + r2 + r3 + · · · + rp(n) ∈ O(rp(n) ).
Für jede Liste wird M (in k ≤ p(n) Schritten) simuliert, also dauert die ganze Simulation einer Eingabe höchstens O(p(n)r p(n) ) Schritte. Es gilt p(n)r p(n) ∈ O(r2p(n) ).
6.7. N P-VOLLSTÄNDIGKEIT
163
Korollar 1. Jedes Problem der Klasse N P kann von einem Algorithmus mit exponentieller Zeitkomplexität
K p(n)
K – Konstante, p(n) – Polynom
gelöst werden.
6.7
N P-Vollständigkeit
Wir haben oben erwähnt, dass kein effizienter Algorithmus für Probleme wie ZERLEGBARKEIT oder TSP bekannt ist. Mit anderen Worten ist es nicht bekannt, ob
diese Probleme in der Klasse P liegen. Eigentlich ist auch die folgende allgemeine
Frage bisher unbeantwortet:
Offenes Problem: Gilt P = N P?
Trotz intensiver Bemühungen vieler Wissenschaftler und trotz vieler Nebenergebnisse zu diesem Thema ist die Antwort noch nicht bekannt. Es gibt aber Probleme,
die in der Klasse N P eine besondere Stellung haben: wenn man für eines dieser
Probleme feststellen würde, dass es zu P gehöre, so würde jedes Problem der Klasse N P zu P gehören – also wäre die Antwort auf die obige Frage positiv. Solche
Probleme (zu denen z.B. TSP gehört) heißen N P-vollständig. Erinnern wir uns an
den Begriff der Reduktion in polynomialer Zeit (6.3):
Definition. Eine Sprache L heißt N P-hart, falls es für jede Sprache L0 der Klasse
N P eine Reduktion auf L in polynomialer Zeit gibt, oder kürzer:
L0 ∈ N P =⇒ L0 / L.
Eine Sprache, die N P-hart ist und zu N P gehört, heißt N P-vollständig .
Satz 1. Falls eine N P-harte Sprache in P liegt, gilt P = N P.
Beweis. Sei L eine N P-harte Sprache in P. Für jede Sprache L0 in N P gibt es
eine Reduktion auf L in polynomialer Zeit. Aus L ∈ P folgt also L0 ∈ P (Satz 1 in
6.3). Damit ist P = N P bewiesen.
Satz 2 (Cookscher Satz.). ERFÜLLBARKEIT ist N P-vollständig.
Beweis.
1. ERFÜLLBARKEIT ist ein Problem der Klasse NP: siehe Beispiel 2
Nr. 3 in Abschnitt 6.6.
2. Für jede Sprache L in N P zeigen wir, dass L auf ERFÜLLBARKEIT in
polynomialer Zeit reduzierbar ist. Wir haben eine Turingmaschine M mit
polynomialer Zeitkomplexität p(n), die L akzeptiert. Wir können für M , ohne
Beschränkung der Allgemeinheit, das folgende annehmen:
(a) Die Zustände von M sind wie folgt durchnumeriert:
q0 (initial), q1 (final), q2 , . . . , qm .
Der finale Zustand q1 ist ein Haltezustand.
def
(b) Die Bandsymbole von M sind s1 , . . . , sk und s0 = #.
(c) Die Zellen des Bandes sind mit ganzen Zahlen durchnumeriert. Die Eingabe steht in den Zellen 1, . . . , n.
164
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Zelle Nr.: −2 −1
...
#
#
0
1
2
#
s i1
s i2
n n+1 n+2 n+3
...
s in
#
#
#
...
⇑
q0
Initialkonfiguration
(d) Die Übergänge sind mit y = 1, 2, . . . , d durchnumeriert und wie folgt in
eine Tabelle geschrieben:
y Übergang Nr. y
1 (qi(1) , sj(1) ) → (qi0 (1) , sj 0 (1) )
2 (qi(2) , sj(2) ) → (qi0 (2) , sj 0 (2) )
..
..
.
.
d (qi(d) , sj(d) ) → (qi0 (d) , sj 0 (d) )
Hier ist sj(y) ein Bandsymbol und sj 0 (y) ist entweder L, R oder ein Bandsymbol.
Bemerkung 1. In der Zeit p(n) kann die TM höchstens p(n) Felder beschriften, also genügt es, die Bandzellen Nr. −p(n), −p(n) + 1, . . . , 0, 1, . . . , p(n) zu
betrachten.
Die Reduktion der Sprache L auf ERFÜLLBARKEIT bedeutet, dass für jedes
Wort w über Σ eine Boolesche Formel φw konstruiert wird, so dass
φw ist erfüllbar ⇐⇒ w ∈ L
und dass die Konstruktion in polynomialer Zeit durchgeführt wird. Die Aussage w ∈ L bedeutet, dass es eine Berechnung des Wortes w durch M gibt,
die im Zustand q1 hält. Eine solche Berechnung können wir durch eine Formel φw eindeutig beschreiben, wenn wir die folgenden Booleschen Variablen
einführen:
NAME BEDEUTUNG: ist true belegt genau dann, wenn UMFANG
qit
Zur Zeit t hat M den Zustand qi .
t = 0, . . . , p(n)
i = 0, . . . , m
krt
Zur Zeit t steht der Kopf im Feld r
t = 0, . . . , p(n)
r = −p(n), . . . , p(n)
stj,r
Zur Zeit t steht im Feld r das Symbol sj
t = 0, . . . , p(n)
j = 0, . . . , k
r = −p(n), . . . , p(n)
uty
Zur Zeit t wird der Übergang Nr. y durchgeführt
t = 0, . . . , p(n) − 1
y = 1, . . . , d
Mit Hilfe dieser Variablen können wir alle Bedingungen einer akzeptierenden
Berechnung von w formal darstellen:
(a) Initialisierung. Zur Zeit t = 0 ist die folgende Belegung true:
q00
k10
s0i1 ,1 , . . . , s0in ,n
s00,b
(Initialzustand q0)
(initiale Kopfposition 1)
(die gegebene Eingabe w = si1 . . . sin in Feldern 1, . . . , n)
für alle b = −p(n), . . . , p(n) außer b = 1, . . . , n
(das Symbol s0 = # in allen Zellen des Bandes außer der Eingabe)
6.7. N P-VOLLSTÄNDIGKEIT
165
Jede von diesen Variablen formt eine Klausel von φw , also ist der Anfang
von φw :
(1)
φw =
q00
∧
k10
∧
n
^
p(n)
s0ib ,b
b=1
∧
^
b=−p(n)
b6=1,...,n
s00,b ∧ . . .
(b) Akzeptanz von w. Eine weitere Klausel von φw gewährleistet, dass w
zum Zeitpunkt t = 1, . . . , p(n) akzeptiert wird, d.h., der Zustand ist q1
(finaler Haltezustand). Das ist die Klausel
p(n)
q11 ∨ q12 ∨ · · · ∨ q1
(2)
(die genau dann true ist, wenn q1t für einen Zeitpunkt t true ist).
(c) Randbedingungen. Wir müssen auch sicherstellen, dass zu jedem Zeitpunkt t die TM
i.
ii.
iii.
iv.
genau einen Zustand hat,
in jedem Feld genau ein Symbol steht,
der Kopf genau eine Position hat und
genau ein Übergang (falls es sich um keine Haltekonfiguration handelt) durchgeführt wird.
Z.B. verlangt (i), dass φw für jeden Zeitpunkt t = 0, 1, . . . , p(n) die folgende Klausel hat:
(3)
m
_
i=0
t
qit = q0t ∨ q1t ∨ · · · ∨ qm
(also: es gibt einen Zustand zum Zeitpunkt t), sowie die Klauseln
(4)
qit → ¬qit0
für alle i 6= i0
(also: zwei Zustände qi und qi0 können nicht gleichzeitig vorhanden sein).
Analoges gilt für (ii)–(iv).
(d) Übergänge. Nehmen wir an, dass die Zeile y der Übergangstabelle die
Bewegung des Kopfes nach links darstellt:
ZEILE y: (qi(y) , sj(y) ) → (qi0 (y) , L)
(Bewegung nach rechts oder Überschreibung des Bandsymbols werden
analog behandelt). Dann müssen wir zu der Konjunktion von φw Klauseln hinzufügen, die gewährleisten, dass uty die erwartete Auswirkung
zum Zeitpunkt t hat:
Falls der Kopf im Feld r steht, wird er als nächstes im Feld r − 1 stehen:
(5)
t+1
(uty ∧ krt ) → kr−1
für alle r = −p(n) + 1, . . . , p(n).
Der Zustand zum Zeitpunkt t muß qi(y) sein und der zum Zeitpunkt t + 1
muß qi0 (y) sein, also hat φw zwei Klauseln
(6)
t
uty → qi(y)
und
uty → qit0 (y)
Falls der Kopf im Feld r steht, muß das Symbol im Feld r gleich sj(y)
sein:
(7)
(uty ∧ krt ) → stj(y),r
für alle r = -p(n), . . . , p(n)
166
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Alle Bandsymbole bleiben unverändert:
(8)
(uty ∧ stj,r ) → st+1
j,r
für alle j = 0, . . . , k
und alle r = −p(n), . . . , p(n) − 1.
Wenn alle Klauseln (5)–(8) zu φw hinzugefügt worden sind, wird der
Übergang Nr. y korrekt ausgeführt. Damit ist die Konstruktion von φw
vollständig.
Es gilt:
φw ist erfüllbar ⇐⇒ M akzeptiert die Eingabe w.
In der Tat ergibt jede akzeptierende Berechnung von w eine Belegung der
Variablen von φw für die alle Teile der Konjunktion true sind, also w = true:
wir setzen qit = true, falls die Berechnung M zur Zeit t den Zustand qi
hatte, analog mit krt und stj,r ; wir setzen uty = true, falls der Übergang Nr.
y im Schritt t durchgeführt wurde. Umgekehrt beschreibt jede Belegung der
Variablen von φw , für die alle Teile der Konjunktion von φw true sind, eine
akzeptierende Berechnung von w.
Wie viel Zeit benötigen wir, um φw zu konstruieren?
Der Teil (1) braucht O(p(n)) Symbole (also O(p(n)) Zeiteinheiten), dasselbe
gilt für den Teil (2). Es läßt sich leicht zeigen, dass die Randbedingungen nur
O(p(n)2 ) Symbole benötigen. Der letzte Teil, der die d Übergänge repräsentiert, braucht
O(p(n))
O(1)
O(p(n))
O(p(n))
Symbole
Symbole
Symbole
Symbole
für
für
für
für
(5)
(6)
(7) und
(8),
und da d eine Konstante ist, brauchen wir für den letzten Teil O(p(n)) Symbole. Also reichen insgesamt
O(p(n)2 ) Symbole.
Es folgt, dass die Konstruktion von φw höchstens O(p(n)2 ) Schritte verlangt.
Bemerkung 2. Die Idee, dass eine Sprache L genau dann zu N P gehört, wenn
angebotene Lösungen in polynomialer Zeit überprüft werden können, läßt sich sich
durch den Begriff Zertifikat formalisieren. Z.B. ist für 3-FÄRBUNG ein Zertifikat
eines ungeordneten Graphen eine Färbung (korrekt oder nicht) seiner Knoten mit
drei Farben. Wir formen die Sprache Lcheck aller Wörter wz, wobei w ein Code
eines Graphen ist und z ein Code seines Zertifikates, das korrekt ist. Diese Sprache
gehört der Klasse P an, denn für jeden Graphen und jede Färbung ist die Korrektheit effizient überprüfbar. Wichtig ist hier, dass die angebotenen Lösungen nicht
komplizierter“ zu codieren sind als die Eingaben selbst. Genauer: für die Wörter
”
wz (w – Eingabe, z - Zertifikat) nehmen wir an, dass die Länge z des Wortes z
durch p(w), wobei p(n) ein Polynom ist, begrenzt werden kann:
Definition. Für eine Sprache L ⊆ Σ∗ heißt eine Sprache Lcheck eine Zertifikatensprache, falls
1. Lcheck in P liegt und
2. es gibt ein Polynom p(n), so dass für jedes Wort w über Σ der Länge n gilt:
w ∈ L ⇐⇒ wz ∈ Lcheck für irgendein Wort z der Länge ≤ p(n).
6.7. N P-VOLLSTÄNDIGKEIT
167
Satz 3. Eine Sprache gehört genau dann zur Klasse N P, wenn sie eine Zertifikatensprache hat.
Beweis.
1. Gegeben eine Zertifikatensprache Lcheck ⊆ Γ∗ für L ⊆ Σ∗ *, wir
beweisen, dass L ∈ N P.
Sei M eine Turingmaschine mit polynomialer Zeitkomplexität q(n), die Lcheck
akzeptiert. Dann haben wir die folgende nichtdeterministische Turingmaschine
M ∗ , die L akzeptiert:
Band 1
Eingabeband
w1 w2
...
wn
Band 2
Erzeugung von z
z1
z2
...
zk
Band 3
Simulation von M
w1 w2
...
wn z1
für k ≤ p(n)
z2
...
zk
Auf Band 1 steht die Eigabe w der Länge n. Auf Band 2 wird nichtdeterministisch ein Wort z über der Länge k ≤ p(n) geschrieben. Dann werden
w und danach z auf Band 3 kopiert, und die Maschine M wird simuliert;
falls M hält und akzeptiert, hält auch M ∗ und akzeptiert. Es folgt also,
dass M ∗ genau die Wörter w akzeptiert, für die es ein Wort z der Länge
≤ p(n) mit wz ∈ Lcheck gibt – also akzeptiert M ∗ die Sprache L. Die Erzeugung von z dauert 2k ∈ O(p(n)) Schritte und die Simulation von M dauert
q(n+k) ∈ O(q(p(n))) Schritte, also hat M ∗ eine polynomiale Zeitkomplexität.
2. Für jede Sprache L ⊆ Σ∗ der Klasse N P konstruieren wir eine Zertifikatensprache. Wir haben eine nichtdeterministische Turingmaschine M mit polynomialer Zeitkomplexität p(n), die L akzeptiert. Für jedes Wort w ∈ L der
Länge n gibt es eine Boolesche Formel φw der Länge O(p2 (n)), die die Berechnung von w vollständig beschreibt – siehe den obigen Beweis des Cookschen
Satzes. Da φw eine Formel in KNF ist, ist sie ein Wort aus den Symbolen
∨, ∧, (, ), x0, x1, x10, . . . , xi
(i ≤ p(n)2 )
wobei i binär dargestellt wird, also ein Wort über
Γ = {∨, ∧, (, ), x, 0, 1}.
Das Wort w hat die Länge O(p2 (n)). Genauer gibt es nur eine Konstante
K, so dass für jedes Wort w ∈ L der Länge n die Berechnung von w durch
eine Formel φw der Länge ≤ Kp2 (n) repräsentiert wird. Nehmen wir der
Einfachheit halber an, dass Γ ∩ Σ = ∅. Dann ist die folgende Sprache Lcheck
über Σ ∪ Γ eine Zertifikatensprache für L: Lcheck besteht aus allen Wörtern
wφ, wobei w ein Wort über Σ (der Länge n) ist und φ eine Boolesche Formel
der Länge ≤ Kp2 (n), die eine akzeptierende Berechnung von w beschreibt,
ist.
(a) Lcheck gehört zu P.
In der Tat, für jedes Wort u der Länge m über Σ ∪ Γ überprüfen wir,
i. ob u = wφ für w ∈ Σ∗ und φ ∈ Γ∗ , wobei w die Länge n und φ die
Länge ≤ Kp2 (n) hat und
168
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
ii. falls ja, ob φ = φw die Formel aus dem Beweis des Cookschen Satzes
ist.
Das kann in linearer Zeit O(m) überprüft werden.
(b) w ∈ L ⇐⇒ es gibt ein Wort wφ ∈ Lcheck, so dass φ die Länge ≤ Kp2 (n)
hat, wobei n die Länge von w ist.
Das folgt aus der Konstruktion von Lcheck.
6.8
Weitere N P-vollständige Probleme
Satz 1. Sei L eine N P-vollständige Sprache. Dann ist jede Sprache in N P, auf
die L in polynomialer Zeit reduziert werden kann, auch N P-vollständig.
Beweis. Sei L0 ⊆ Γ∗ eine Sprache der Klasse N P, und sei f : Σ∗ → Γ∗ eine
Reduktion von L ⊆ Σ∗ auf L0 in polynomialer Zeit. Wir beweisen, dass L0 N Pvollständig ist.
Für jede Sprache L0 ⊆ (Σ0 )∗ der Klasse N P gibt es eine Reduktion g : (Σ0 )∗ → Σ∗
von L0 nach L in polynomialer Zeit. Es genügt zu zeigen, dass die zusammengesetzte
Abbildung f (g(x)) von (Σ0 )∗ nach Γ∗ eine Reduktion in polynomialer Zeit von L0
nach L0 ist. Damit ist die N P-Vollständigkeit von L0 bewiesen.
Für jedes Wort x über Σ gilt
x ∈ L0 ⇐⇒ g(x) ∈ L ⇐⇒ f (g(x)) ∈ L0 ,
also müssen wir nur zeigen, dass f (g(x)) eine Funktion der Klasse FP ist. Sei M
eine TM, die f berechnet und die polynomiale Zeitkomplexität p(n) hat, und sei
M eine TM, die g berechnet und die polynomiale Zeitkomplexität q(n) hat. Dann
haben wir eine 2-Band Maschine M ∗ , die auf Band 1 die Maschine M simuliert
(in q(n) Schritten) und das Ergebnis auf Band 2 kopiert, wo sie die Maschine M
simuliert (in p(q(n)) Schritten). Das Ergebnis von M ∗ auf Band 2 ist das Wort
f (g(x)), das in O(p(q(n))) Schritten berechnet wurde.
Beispiel 1 (3-ERFÜLLBARKEIT). Wir wissen, dass 2-ERFÜLLBARKEIT zu P
gehört. Trotzdem ist 3-ERFÜLLBARKEIT, d.h., das Problem der Erfüllbarkeit für
Formeln, die in KNF höchstens drei Literale je Klausel enthalten, NP-vollständig:
1. 3-ERFÜLLBARKEIT gehört zu N P – klar.
2. Für ERFÜLLBARKEIT existiert eine Reduktion in polynomialer Zeit auf
3-ERFÜLLBARKEIT:
In der Tat kann jede Klausel aus vier Literalen
a1 ∨ a 2 ∨ a 3 ∨ a 4
mit zwei Klauseln aus je drei Literalen
(a1 ∨ a2 ∨ b) ∧ (¬b ∨ a3 ∨ a4 )
ersetzt werden. Es ist klar, dass a1 ∨ a2 ∨ a3 ∨ a4 genau dann erfüllt ist, wenn die
letzte Formel mit b = true oder b = false erfüllt. Analog wird
a1 ∨ a 2 ∨ a 3 ∨ a 4 ∨ a 5
mit drei Klauseln ersetzt:
(a1 ∨ a2 ∨ b) ∧ (¬b ∨ a3 ∨ c) ∧ (¬c ∨ a4 ∨ a5 )
usw. Diese Übersetzung dauert lineare Zeit O(n), denn für jede Klausel der Länge
n benötigen wir n − 2 Klauseln der Länge 3.
6.8. WEITERE N P-VOLLSTÄNDIGE PROBLEME
169
Beispiel 2 (3-FÄRBUNG.). Dies ist das Problem, ob ein gegebener Graph mit
drei Farben gefärbt werden kann. Während 2-FÄRBUNG zu P gehört (Beispiel
3 in 6.1), zeigen wir jetzt, dass 3-FÄRBUNG N P-vollständig ist. Also gilt auch
hier: falls jemand einen effizienten Algorithmus für 3-FÄRBUNG findet, beweist er
P = N P!
1. 3-FÄRBUNG ist in N P. Falls eine 3-Färbung der Knoten vorgeschlagen wird,
können wir in linearer Zeit entscheiden, ob sie korrekt ist.
2. 3-ERFÜLLBARKEIT läßt sich in polynomialer Zeit auf 3-FÄRBUNG reduzieren.
Um den zweiten Teil zu beweisen, benutzen wir den folgenden Hilfsgraphen
b
•
a
•
c
•
•??
•
??
??
?
•
•??
•
??
??
??
•
d
Hilfsgraph
Wenn seine Knoten mit drei Farben, z.B. weiß, schwarz, blau gefärbt werden gilt:
(1)
Falls a, b und c schwarz sind, muß d auch schwarz sein.
(Das ist leicht zu überprüfen, denn falls b und c schwarz sind, ist keiner der beiden
Knoten direkt unter b und c schwarz und die Spitze des rechten Dreiecks muß also
schwarz sein. Dasselbe gilt dann für das linke Dreieck.)
(2)
Falls a oder b oder c weiß ist, darf d weiß sein.
Genauer: färben wir a, b, c so mit den drei Farben, so dass mindestens einmal weiß
benutzt wird, dann läßt sich der ganze Hilfsgraph so färben, dass d weiß wird. (Das
ist auch leicht zu überprüfen).
Wir konstruieren jetzt für jede Boolesche Formel φ mit Klauseln aus drei Literalen
einen Graphen Gφ , so dass
φ ist erfüllbar ⇐⇒ Gφ ist 3-färbbar.
Der Graph Gφ hat drei verschiedene Typen von Knoten. Typ 1 sind drei Knoten,
die mit den drei Farben markiert werden und ein Dreieck formen:
•B
S •OOOO
OOO
OOO
OOO
•
W
170
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Typ 2: für jede Variable x der Formel φ wird ein extra Dreieck an den Knoten B
angehängt. Die beiden freien Knoten dieses Dreiecks werden mit x und ¬x markiert.
Z.B. erhalten wir, falls φ nur die Variablen x, y, z hat, den folgenden Graphen:
x
¬x
•??
•
?? y
¬y
??•7
??77 z ¬z •
??77•- •
??77--
?7?-
•B
S •OOOO
OOO
OOO
OOO
•
W
Typ 3: für jede Klausel α ∨ β ∨ γ der Formel φ nehmen wir den obigen Hilfsgraphen:
β
•
α
•
γ
•
•??
•
??
??
?
•
•
•??
??
??
??
•
W
und die vier Knoten, die mit α, β, γ, W markiert sind, werden mit den gerade markierten Knoten des Typs 2 identifiziert. Beispiel: für
φ = y ∨ ¬x ∨ ¬z
(1 Klausel)
erhalten wir den Graphen
x
¬x
•OOO
o•
o
o
OOO
ooo
OOO
y
¬y
ooo
OOO
o
o
o
OOO •JJJ
tt• oo
OOO JJ
tt ooooo
t
¬z
OOO JJJ z
tt oo
OOO JJ •::
• tttotooo
OOOJJJ :
o
OOJOJ::
ttototXoo
OJOJO:J: tto
o • XXXXX
o
XXXXXX eeeeeeeeeee•
O•t
oB
S •WWWWWWW
•ee
WWWWW
WWWWW •SSSS
j
j •
WWWWW SSSS
jjjj
j
j
WWWWWSSS
j
WWWSWSWS
jjj
WSWSW jjjjj
•
W
Wir beweisen zuerst:
φ erfüllbar =⇒ Gφ ist 3-färbbar.
6.8. WEITERE N P-VOLLSTÄNDIGE PROBLEME
171
Für die gegebene Belegung der Variablen mit φ = true färben wir wie folgt:
1. S, B und W wie angedeutet (schwarz, blau, weiß),
2. Knoten des Typs 2 sind weiß, falls ihr Wert true ist, und schwarz, falls der
Wert false ist,
3. in jedem der Hilfsgraphen ist mindestens einer der Knoten a, b, c weiß gefärbt,
deshalb können wir eine Färbung finden, die auch d weiß färbt finden, siehe
(2) oben.
Umgekehrt beweisen wir:
Gφ 3-färbbar =⇒ φ erfüllbar.
Wir können, ohne Beschränkung der Allgemeinheit, annehmen, dass die gegebene
Färbung die Knoten des Typs 1 wie angedeutet färbt. Wir setzen dann
x = true ⇐⇒ der x-Knoten des Typs 2 ist weiß.
Wir beweisen, dass φ = true, d.h., dass in jeder Klausel α ∨ β ∨ γ von φ eines
der Literale α, β, γ true ist. Da kein Knoten des Typs 2 blau gefärbt werden kann
(wegen der Kante zu B), sind sie schwarz oder weiß. Aufgrund der Eigenschaft (1)
des Hilfsgraphen können nicht α, β, γ gleichzeitig schwarz sein – also ist α, β oder
γ true.
Es ist klar, dass für eine Formel φ der Größe
n = Anzahl aller Variablen + Anzahl aller Klauseln
die Konstruktion des Graphen Gφ in linearer Zeit O(n) durchführbar ist.
Beispiel 3. k-FÄRBUNG ist NP-vollständig für jedes k ≥ 3. Wir können z.B. 3FÄRBUNG auf 4-FÄRBUNG in polynomialer Zeit wie folgt reduzieren: ein Graph
G ist genau dann 3-färbbar, wenn der folgende Graph
y•'7E7ENeuer Knoten
yy ''' 7E7EE
y
y 7 E
yy ' 7 EE
yy '' 777 EEE
y
''
y
77 EEE
yy •
•
•
•y • •
G
4-färbbar ist.
Bemerkung 1. Ein Graph ist planar , falls er so in der Ebene gezeichnet werden
kann, dass die Kanten sich nicht überkreuzen. Das k-Färbungsproblem für planare
Graphen ist
1. trivial für k ≥ 4, denn jeder planare Graph ist 4-färbbar, aber trotzdem
2. N P-vollständig für k = 3 (vergl. Bemerkung 4 in Abschnitt 6.5).
Wir erinnern daran, dass ein Hamiltonscher Kreis in einem ungerichteten Graphen
ein Kreis ist, der jeden Knoten genau einmal besucht. Das Problem HAMILTONSCHER KREIS hat als Eingabe einen Graphen G und wir sollen entscheiden, ob G
einen Hamiltonschen Kreis hat.
172
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Beispiel 4. (ohne Beweis) HAMILTONSCHER KREIS ist ein N P-vollständiges
Problem.
Beispiel 5. TSP ist N P-vollständig. Wir haben in Beispiel 2 Nr. 4 in Abschnitt
6.6 bemerkt, dass TSP zur Klasse N P gehört. Es ist also genug, eine Reduktion
von HAMILTONSCHER KREIS auf TSP in polynomialer Zeit zu finden. Das ist
trivial: für jeden Graphen G mit Knoten 1, . . . , n setzen wir
(
1 falls (i, j) eine Kante ist
dij =
2 sonst
Dann hat dieses TSP genau dann eine Lösung mit Gesamtkosten n, wenn G einen
Hamiltonschen Kreis hat.
Schlußbemerkung: Für hunderte von Problemen (einschließlich praktisch sehr wichtiger wir z.B. TSP oder 3-FÄRBUNBG) ist heute bekannt, dass sie N P-vollständig
sind. Das Problem ZERLEGBARKEIT (Beispiel 1) ist eines der wenigen Probleme,
für die nicht bekannt ist, ob sie N P-vollständig sind. Es gilt aber, falls P 6= N P,
dass in N P Probleme existieren, die nicht N P-vollständig sind (ohne Beweis).
6.9
Komplexitätsklasse coN P
Definition. Mit coN P bezeichnen wir die Klasse aller Sprachen L, für die gilt: die
komplementäre Sprache liegt in N P:
L ∈ coN P ⇐⇒ L ∈ N P
Beispiel 1 (PRIMZAHL). Eingabe: Zahl n
Ausgabe: JA genau dann, wenn n eine Primzahl ist.
Dies ist also komplemaentär zu ZERLEGBARKEIT, deswegen
PRIMZAHL ∈ coN P.
Beispiel 2 (GÜLTIGKEIT). Eingabe: Boolsche Formal φ in KNF.
Ausgabe: JA genau dann, wenn φ gültig ist, d.h. für jede Belegung der Variablen
gilt φ = true.
Dies ist ein Problem in coN P, denn eine Belegung mit φ = false ist ein Zertifikat
für die komplementäre Sprache!
Bemerkung 1.
1.
P ⊆ coN P.
In der Tat, bei einer deterministischen TM genügt es, die finalen und nichtfinalen Zustände zu vertauschen.
2. coN P ist unter Reduktion abgeschlossen:
L0 ∈ coN P, L / L0 =⇒ L ∈ coN P
Es gilt nämlich L / L0 : wir haben doch f : Γ∗ → Σ∗ in FP, so dass
w ∈ L ⇐⇒ f (w) ∈ L0 ,
und dies bedeutet
w ∈ L ⇐⇒ f (w) ∈ L0 .
6.9. KOMPLEXITÄTSKLASSE CON P
173
Definition. Eine Sprache L0 heißt coN P-vollständig , falls sie in coN P liegt und
L ∈ coN P =⇒ L / L0 .
Beispiel 3. GÜLTIGKEIT ist coN P-vollständig.
in der Tat, gegeben L ∈ coN P, dann gibt es weil L ∈ N P, eine Reduktion in
polynomialer Zeit von L auf ERFÜLLBARKEIT. Sei f diese Reduktion: jedem
Wort w wird eine Formel f (w) zugeordnet mit
w ∈ L ⇐⇒ f (w) erfüllbar.
Eine Formel φ ist genau dann gültig, wenn ¬φ immer false, d.h. unerfüllbar ist. Sei
jetzt g die folgende Funktion:
g(w) = ¬f (w)
Aus f ∈ FP folgt bestimmt g ∈ FP. Und
w ∈ L ⇐⇒ w ∈
/L
⇐⇒ f (w) nicht erfüllbar
⇐⇒ g(w) gültig
Offenes Problem: Gilt N P = coN P ? Die Antwort ist ja, falls GÜLTIGKEIT in
N P liegt:
Satz 1. Falls N P 6= coN P, endhält N P keine coN P-vollständige Sprache.
Beweis. Sei L0 coN P-vollständig. Wir beweisen, dass
L0 ∈ N P =⇒ L ∈ N P für alle L ∈ coN P
d.h., falls L0 ∈ N P, gilt coN P ⊆ N P):
Es gibt Reduktion f in polynomialer Zeit von L nach L0 (da L ∈ coN P). Gegeben
eine NTM M , die L0 in polynomialer Zeit akzeptiert, die Kombination
Band 1
f berechnet
Band 2
M simuliert
ergibt eine NTM, die L in polynomialer Zeit akzeptiert, also L ∈ N P.
Und
L0 ∈ N P =⇒ L ∈ coN P für alle L ∈ N P
(d.h., N P ⊆ coN P): hier existiert eine Reduktion f von L auf L0 , und die obige
NTM akzeptiert in polynomialer Zeit die Sprache L, das beweist L ∈ N P, also
L ∈ coN P.
Bemerkung 2. Für PRIMZAHL gilt auch
PRIMZAHL ∈ N P,
aber dies ist ein nichttriviales Ergebnis, dessen Beweis hier nicht durchgeführt wird.
Die Klasse
N P ∩ coN P
aller Probleme, die effektives Zertifikat für Antwort JA sowie für Antwort NEIN
habe, enthält also interssante Probleme. Wir wissen, dass sie P enthält.
Offenes Problem Gilt P = N P ∩ coN P?
174
6.10
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Komplexität von Optimierungsproblemen
Viele Probleme sind weder als Entscheidungsprobleme, noch als Berechnungsprobleme zu verstehen, sondern als Probleme, die für einen maximalen (oder minimalen)
Wert eines Parameters eine Konstruktion verlangen. Solche Maximierungs- oder
Minimierungsprobleme heißen Optimierungsprobleme.
Beispiel 1 (MINIMALE FÄRBUNG). Eingabe: Ungerichteter Graph G
Ausgabe: Eine Färbung von G mit minimaler Zahl von Farben.
Gibt es eine effiziente Lösung dieses Problems? Bestimmt nicht (falls P 6= N P),
denn jeder Algorithmus für MINIMALE FÄRBUNG kann natürlich 3-FÄRBUNG
lösen. Für jedes Minimierungsproblem M haben wir das zugrunde liegende Entscheidungsproblem, dessen Eingabe ein Paar (x, y) ist, wobei x die Eingabe von
M und y eine Zahl ist. Die Entscheidung lautet: hat P eine Lösung der Eingabe
x mit einem Parameter ≤ y? Es ist klar, dass ein Minimierungsproblem, das eine
effiziente Lösung hat, die Eigenschaft hat, dass das zugrunde liegende Entscheidungsproblem zu P gehört.
Analoges gilt für Maximierungsprobleme.
Beispiel 2 (MAXIMALES MATCHING). Eingabe: Ungerichteter Graph G Ausgabe: Eine maximale Menge von Kanten, die voneinander disjunkt sind.
Dies ist ein Optimierungsproblem mit vielen praktischen Anwendungen. Der Name stammt von der Anwendung, wobei eine Gruppe von Männern und Frauen die
Knotenmenge von G formen und eine Kante einen Mann x mit einer Frau y genau
dann verbindet, wenn sie ein potentielles Paar formen. Die Aufgabe ist dann, die
größte Menge von aktuellen Paaren zu bilden, für die kein(e) Teilnehmer(in) mehrmals auftritt. Dieser Graph ist offensichtlich 2-färbbar; oft wird das MAXIMALE
MATCHING Problem nur für 2-färbbare Graphen untersucht.
Es gibt einen effizienten Algorithmus, der MAXIMALES MATCHING löst. Die
Grundidee ist, dass jedes Matching M durch einen erweiternden Weg verbessert
werden kann. Für das gegebene Matching M heißt eine Kante des Graphen G frei ,
falls sie nicht in M liegt, und ein Knoten heißt frei, falls er kein Endknoten einer
Kante in M ist.
Definition. Für ein Matching M im Graphen G heißt ein Weg in G erweiternd ,
falls seine Endknoten frei sind und seine Kanten abwechselnd frei und unfrei sind.
Beispiel 3. Im Graphen G
x1 •/OOO
•
// OO
O
O
//
OOO OO
/
O
•
x2 •OOO//
O/OO
// O
OO
/ O
OOO
x3 •OOO
// ooo
•
OOOO
o
//oo
ooO/
ooo
O/OOO
x4 •
oo /// O•
//
//
x •
•
5
hat das Matching M :
y1
y2
y3
y4
y5
6.10. KOMPLEXITÄT VON OPTIMIERUNGSPROBLEMEN
x1 •
• y1
x2 •
• y2
x3 •
• y3
x4 •
• y4
x5 •
• y5
175
den folgenden erweiternden Weg: x4 , y1 , x1 , y2 , x2 , y3 , x3 , y4 .
Satz 1. Falls ein Matching M einen erweiternden Weg W hat, gibt es ein größeres
Matching M 0 , das aus M dadurch ensteht, dass die freien und unfreien Kanten von
W ausgetauscht werden.
Beweis. M 0 ist ein Matching, denn für die inneren Knoten x des Weges W gibt es
genau eine Kante in M , auf der x liegt, und die wird in M 0 mit genau einer Kante
von W ausgetauscht. Für die beiden Endknoten von W (die in M frei sind) gibt es
auch genau eine Kante in M 0 .
Da beide Endknoten des Weges W frei sind, hat W mehr freie als unfreie Kanten,
also hat M 0 mehr Kanten als M .
Im obigen Beispiel erhalten wir das Matching
x1 •OOO
•
OOO
OOO O
OO
O•
x2 •OOO
OOO O
O
OOOOO
x3 •OOO
•
OOOO
OOO
OOO
x4 •
•
y1
y2
y3
y4
• y5
x5 •
Dieses Matching hat immer noch erweiternden Wege, etwa x5 , y2 , x1 , y5 , oder auch
x5 , y3 , x2 , y2 , x1 , y5 . Diese liefern die neuen Matchings
x1 •/
•
//
//
/
•
x2 •OOO//
O/OO // O
OO / O
OO
x3 •OOO
// O•
O /
OO
O
O
/O/
/O/OOO
x4 •
// •
//
//
x5 •
•
y1
y2
y3
y4
y5
bzw.
x1 •/
•
//
//
/
•
x2 • //
// /
/
x3 •OOO
//
•
OOOO//
O
/
O/OO
// OO•
x4 •
//
//
/
x5 •
•
y1
y2
y3
y4
y5
für die es keine erweiternden Wege mehr gibt – deshalb sind sie maximal:
176
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Satz 2. Jedes Matching, für das es keinen erweiternden Weg gibt, ist maximal.
Beweis. Mit anderen Worten sollen wir für jedes Matching M zeigen, dass, falls es
ein größeres Matching M ∗ gibt, M einen erweiternden Weg hat.
Sei G der Graph, dessen Knoten die Knoten von G sind und dessen Kanten alle
Kanten in
(M − M ∗ ) ∪ (M ∗ − M )
sind, d.h. alle Kanten, die in genau einem der Matchings M und M ∗ liegen. Jeder
Knoten von G liegt auf höchstens zwei Kanten. Das bedeutet, dass G eine disjunkte
Vereinigung von Zyklen und (maximalen) Wegen ist. Da sich in jedem Zyklus die
Kanten von M und M ∗ abwechseln, gilt: in jedem Zyklus ist die Zahl von Kanten
aus M gleich der Zahl der Kanten aus M ∗ . Andererseits hat G mehr Kanten aus M ∗
als aus M , da M ∗ mehr Elemente als M enthält. Es gibt also einen maximalen Weg
W in G, auf dem mehr Kanten aus M ∗ als aus M liegen. Das bedeutet, dass beide
Endkanten von W in M ∗ liegen. Da der Weg W maximal ist, sind seine Endknoten
frei im Matching M . Also ist W ein erweiternder Weg für M.
Algorithmus für MAXIMALES MATCHING
Eingabe: Ungerichteter Graph G = (V, E)
Ausgabe: Maximales Matching M ⊆ E
1: Initialisierung M := ∅
2: while ein erweiternder Weg W für M existiert do
3:
M := M 0 für M 0 aus Satz 1
4: od
Korrektheit: folgt aus Satz 1 und 2. Am Ende des while-Zyklus (der aufgrund von
Satz 1 konvergiert) hat M keinen erweiternden Weg und ist also maximal.
Zeitkomplexität: hängt natürlich von der Zeitkomplexität des Suchen des erweiternden Weges in Zeile 2 ab. Es sind Algorithmen bekannt, die für Graphen mit
n Knoten und k Kanten die Zeitkomplexität O(nk) haben. Dann hat der ganze
Algorithmus oben Zeitkomplexität O(nk).
Beispiel 4 (MAXFLOW). Das Problem MAXIMALES MATCHING ist ein Spezialfall des MAXFLOW Problems: gegeben seien ein gerichteter Graph G und zwei
Knoten s (source) und t (target), wir suchen den maximalen Fluß Kanten-disjunkter
Wege von s nach t. (Die Wege dürfen also gemeinsame Knoten haben, aber keine
gemeinsamen Kanten.) Auch hier wird die Lösung mit Hilfe von erweiternden Wegen berechnet. Gegeben ein Fluß H mit Wegen von s nach t, eine Kante von G
heißt frei , falls sie auf keinem Weg von H liegt. Ein erweiternder Weg für H ist
eine Liste
s = v0 , v1 , . . . , vn−1 , vn = t
von Knoten von G, so dass für jedes i = 1, . . . , n gilt
• entweder ist (vi−1 , vi ) eine freie Kante von G, oder
• (vi , vi−1 ) ist eine unfreie Kante von G.
Wir erweitern H, indem alle freien Kanten (vi−1 , vi ) unfrei werden und alle unfreien
Kanten (vi , vi−1 ) frei werden.
Beispiel: Sei G der Graph und H der mit dickeren Linien gekennzeichneter Fluß wie
folgt:
6.10. KOMPLEXITÄT VON OPTIMIERUNGSPROBLEMEN
177
x aaaaa0B x0
•?a?? •G BB
??? 0 BBB
y ??y]]]]]BB
].•> t
/B
s •
•BB •
??
B
||
??
B
|
?? BB ||
?]] ]]] B ||
]•
.|
•
z
z0
Der folgende erweiternde Weg
s, y, z 0 , z, x0 , x, y 0 , t
führt zum folgenden Fluß:
x
x0
/C
FC
•?DD
•
D
C
y DDDD y 0 CCCC
D!]]]]] C!
]•
.
/BB •
s •
??
•
z= t
B
z
??
B
z
?? BBB zzz
?
Bzz
/
•
•
z
z0
Auch für MAXFLOW gibt es einen Algorithmus, der aufrund erweiternder Wege in
der Zeit O(nk) das Problem löst.
Um das Konzept eines Optimierungsproblems zu formalisieren, nehmen wir an, dass
die Eingabe sowie potentielle Lösungen in demselben Alphabet Σ codiert werden.
Z.B. nehmen wir für MINIMALE FÄRBUNG an, dass die Eingabe G binär (z.B.
als Adjazenzmatrix) codiert wird, also über Σ = {0, 1}. Jede Färbung mit k Farben
1, 2, . . . , k kann auch über Σ codiert werden, z.B. als das Wort 0i1 10i2 1 . . . 10in 1,
wobei der Knoten 1 mit der Farbe i1 gefärbt wird, der Knoten 2 mit der Farbe i2 ,
usw. Wir haben eine Relation L auf der Menge Σ∗ aller Wörter, wobei
vLw
bedeutet, dass die Instanz v des Problems durch w gelöst wird. D.h., dass v einen
Graphen G codiert, w eine Färbung codiert und diese Färbung für G korrekt ist.
Schließlich haben wir einen Parameter c(v, w), den wir optimieren wollen, und der
von der Eingabe v und der Lösung w abhängen kann. Wir betrachten also eine
Funktion
c:L→
Für MINIMALE FÄRBUNG ist
c(v, w) = Anzahl der in w verwendeten Farben.
Allgemein:
Definition.
bei
1. Ein Optimierungsproblem ist ein 5-Tupel (Σ, E, A, L, c), wo-
Σ ein Alphabet ist (in dem Eingaben und Lösungen codiert werden),
E eine Sprache über Σ ist (aller möglichen Eingaben),
A eine Sprache über Σ ist (aller möglichen Lösungen oder Ausgaben)
178
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
L ⊆ E × A ist eine Relation auf der Menge Σ∗ (insbesondere folgt aus vLw
sofort v ∈ E und w ∈ A) und
c eine Funktion (Kostenfunktion) ist, die jedem Paar (v, w) ∈ L die Kosten
c(v, w) ∈ N der Lösung w zur Eingabe v zuordnet.
2. Eine Turingmaschine löst das Minimierungsproblem (Maximierungsproblem) (Σ, E, A, L, c), falls sie für jede Eingabe v ∈ E mit einer Ausgabe
w ∈ A hält, für die gilt
(a) vLw und
(b) c(v, w) ≤ c(v, w 0 ) (c(v, w) ≥ c(v, w 0 )) für alle w0 ∈ A mit vLw0 .
Die Relation L kann auch mit ihrer charakteristischen Funktion χL : E × A →
{true, false} identifiziert werden.
Beispiel: die TM, die den oberen Algorithmus für MAXIMALES MATCHING implementiert, ist eine Lösung des Problems. Wie erwähnt, hat diese TM eine polynomiale Zeitkomplexität. Deswegen gehört MAXIMALES MATCHING zur folgenden
Klasse:
Definition. Die Klasse PO besteht aus allen Optimierungsproblemen (das heißt,
allen Minimierungs- und Maximierungsproblemen) (Σ, E, A, L, c), für die gilt:
1. E und A sind Sprachen der Klasse P (d.h., wir haben eine effiziente Prozedur,
die entscheidet, ob ein Wort eine Ein- oder Ausgabe codiert)
2. es gibt ein Polynom p(x), so daß jedes Paar (u, v) ∈ L der Bedingung |v| ≤
p(|u|) genügt (d.h., zu einer Eingabe kann es nur “kurze” Lösungen geben);
3. χL : E × A → {true, false} ist eine Funktion der Klasse FP
4. c ist eine Funktion der Klasse FP und
5. es gibt eine TM mit polynomialer Zeitkomplexität, die das Optimierungsproblem löst.
Beispiel 5. MINMALE FÄRBUNG gehört nicht zu PO, falls P 6= N P, denn
3-FÄRBUNG ist ein N P-vollständiges Problem.
Beispiel 6. MAXIMALES MATCHING gehört zu PO.
In der Tat
1. gibt es Algorithmen, die in linearer Zeit entscheiden, ob ein binäres Wort einen
Graphen oder ein Matching codiert
2. ist jedes Matching als Teilmenge der Kantenmenge linear in der Eingabegröße
beschränkt
3. gibt es einen Algorithmus, der in linearer Zeit entscheidet, ob eine Menge von
Knoten ein Matching ist
4. kann die Bewertung der Zahl c(w, v) aller Knoten des Matching v in linearer
Zeit durchgeführt werden und
5. haben wir einen effizienten Algorithmus für die Lösung von MAXIMALES
MATCHING oben gezeigt.
6.11. APPROXIMATION VON OPTIMIERUNGSPROBLEMEN
179
Bemerkung 1. Für jedes Minimierungsproblem
(Σ, E, A, L, c)
definieren wir das zugrunde liegende Entscheidungsproblem: gegeben ein Paar
(w, n) mit w ∈ E und n ∈ , gibt es eine Lösung v ∈ A, so dass
(∗)
vLw
und
c(w, v) ≤ n?
Für jedes Minimierungsproblem der Klasse PO gehört das zugrunde liegende Entscheidungsproblem zur Klasse P. In der Tat können wir für jede Eingabe (w, n)
in polynomialer Zeit die entsprechende minimale Lösung v finden, berechnen wir
in polynomialer Zeit den Wert c(w, v) und schließlich entscheiden wir in der Zeit
O(log n), ob dieser Wert kleiner gleich n ist.
Analog für Maximierungsprobleme: hier wird die Ungleichung von (∗) umgedreht.
Umgekehrt gilt also: falls P 6= N P, enthält PO kein Optimierungsproblem, dessen
zugrunde liegendes Entscheidungsproblem N P-vollständig ist.
Beispiel 7 (MINIMALES TSP). (siehe 6.6, Beispiel 2 Nr. 4)
Eingabe: w = (di,j )i,j=1,...,n , wobei di,j ∈
Stadt j sind.
die Kosten des Weges von Stadt i zu
Ausgabe: Permutation v = (i1 , i2 , . . . , in ), die die Kosten
c(w, v) = di1 ,i2 + di2 ,i3 + · · · + din−1 ,in + din ,i1
minimiert.
Diese Aufgabe gehört nicht zu PO, falls P 6= N P, denn wir wissen, dass das zugrunde liegende Entscheidungsproblem N P-vollständig ist.
6.11
Approximation von Optimierungsproblemen
Falls es für ein Optimierungsproblem keinen effizienten Algorithmus gibt, der die
optimale Lösung findet, können wir versuchen, eine suboptimale Lösung effizient zu
konstruieren.
Beispiel 1. MINIMALE KNOTEN-ÜBERDECKUNG
Eingabe: Ungerichteter Graph
Ausgabe: Minimale Menge D an Knoten, so dass jede Kante einen Knoten aus D
enthält.
Es ist bekannt, dass das zugrunde liegende Entscheidungsproblem (ob eine Knotendeckung mit höchstens n Knoten existiert) N P-vollständig ist. Eine suboptimale
Lösung kann wie folgt beschrieben werden:
Algorithmus für KNOTEN-ÜBERDECKUNG
Eingabe: Ungerichteter Graph G
Ausgabe: Eine Knotenüberdeckung D
1: D := ∅
2: V := die Menge aller Knoten von G
3: E := die Menge aller Kanten von G
4: while E eine Kante (x, y) enthält do
5:
D := D ∪ {x, y}
180
6:
7:
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
E := E − {v : v eine Kante mit Endknoten x oder y}
od
Korrektheit: Wir konstruieren hier eine Menge D von Knoten mit der Eigenschaft,
dass jede im Schritt 6 entfernte Kante einen Endknoten in D hat. Da am Ende alle
Kanten entfernt worden sind, ist D eine Knotenüberdeckung.
Zeitkomplexität ist linear, denn jede Kante des Graphen wird von dem Algorithmus
nur einmal besucht.
Beziehung zum Optimum: Bezeichnen wir für jeden Graphen G mit opt(G) die minimale Größe einer Knoten-Überdeckung und mit c(G) die Größe der Überdeckung,
die unser Algorithmus konstruiert. Es gilt
c(G) ≤ 2opt(G).
In der Tat hat der Algorithmus die folgende Eigenschaft: D wird mittels paarweise
disjunkter Kanten des Graphen G konstruiert. Jede Überdeckung D0 muß wenigsten einen Endknoten von jeder dieser Kanten enthalten, also muß D0 mindestens
halbsoviele Elemente wie D haben.
Definition. Sei (Σ, E, A, L, c) ein Optimierungsproblem. Ein ε-approximierender
Algorithmus (ε ≥ 0 eine reelle Zahl) ist ein Algorithmus der Klasse P, der für jede
Eingabe w ∈ E eine Ausgabe v ∈ A mit vLw berechnet, so dass der relative Fehler
von c(w, v) im Vergleich zum optimalen Wert opt(w) kleiner gleich ε ist; d.h., es gilt
kc(w, v) − opt(w)k
≤ ε.
opt(w)
Beispiel 2. Für MINIMALE KNOTEN-ÜBERDECKUNG haben wir einen 1approximierenden Algorithmus gefunden: es gilt c(w, v) ≤ 2opt(v), also
kc(w, v) − opt(w)k
≤ 1.
opt(w)
Dieser Algorithmus ist nicht ε-approximierend für ε < 1, denn schon für den Graphen mit zwei Knoten und einer Kante gilt opt = 1, c(w, v) = 2.
Beispiel 3 (SIT (Scheduling Independent Tasks)). Es sollen Aufgaben W1 , . . . , Wn
mit gegebener zeitlicher Dauer t1 , . . . , tn durch k Maschinen bewältigt werden. Wir
nehmen an, dass jede Maschine unabhängig von den anderen jede Aufgabe bearbeiten kann. Unsere Ziel ist es, einen Plan (schedule) zu erstellen, d.h. jeder Arbeit Wi
(i = 1, . . . , n) eine Maschine S(i) = 1, . . . , k zuzuordnen, so dass der Zeitbedarf T
zur Erledigung
aller Aufgaben minimal ist. Die Laufzeit der Maschine m(= 1, . . . , k)
P
beträgt ti , wobei über alle i mit S(i) = m summiert wird. Der Zeitbedarf ist somit
T = max{
X
S(i)=1
ti , . . . ,
X
S(i)=k
ti }.
Da die Zahl k der Maschinen konstant ist, bezeichnen wir das Problem als SIT(k).
Wir haben also:
Eingabe von SIT(k): Zahlen t1 , . . . , tn .
Ausgabe von SIT(k): eine Funktion
S : {1, . . . , n} → {1, . . . , k},
6.11. APPROXIMATION VON OPTIMIERUNGSPROBLEMEN
für die die Zahl
T = max{
X
ti , . . . ,
S(i)=1
X
S(i)=k
181
ti }
minimal ist.
Ein 1/3-approximierender Algorithmus A für SIT(k)
Der folgende Algorithmus erledigt erst die längsten Arbeiten und erst dann die
kürzeren. Außerdem zieht er die am wenigsten benutzten Maschinen vor. Wir benutzen die Hilfsvariable
Tm = die Zeit, die Maschine m bisher gearbeitet hat
Eingabe: Zahlen t1 , . . . , tk
Ausgabe: Funktion S : {1, . . . , n} → {1, . . . , k}
1: sortiere die gegebenen Zeiten, so dass t1 ≥ t2 ≥ · · · ≥ tn
2: for m = 1 to k do
3:
Tm := 0
4: end for
5: for i = 1 to n do
6:
m := ein Index mit Tm = min{T1 , . . . , Tk }
7:
S(i) := m
8:
Tm := Tm + ti
9: end for
Korrektheit: In der zweiten Schleife ab Zeile 5 wird jede Aufgabe Wi einer Maschine
S(i) zugeordnet.
Zeitkomplexität: Das Sortieren in Zeile 1 dauert O(n·log n) Zeiteinheiten, die Initialisierung in Zeilen 2–4 dauert O(1) Einheiten, jeder der n Durchläufe der Schleife ab
Zeile 5 dauert O(1) Zeiteinheiten (insbesondere besitzt die Menge, deren Minimum
in Zeile 6 zu bestimmen ist, immer k Elemente). Insgesamt wird der Zeitbedarf des
Algorithmus durch das Sortieren in Zeile 1 dominiert und betragt
O(n log n).
Dies ist also ein Algorithmus der Klasse P.
Approximierung: Dieser Algorithmus ist 1/3-approximierend. Anstatt dies hier zu
beweisen, zeigen wir (für ein beliebig kleines ε > 0) einen ε-approximierenden Algorithmus für SIT(k).
Beispiel 4 (Ein ε-approximierender Algorithmus für SIT(k)). Die Idee ist einfach:
wir wählen eine geeignete“ Konstante und verteilen die ersten r (längsten) Aufga”
ben optimal – z.B. suchen wir aus allen k r möglichen Zuordnungen die beste aus.
Den Rest berechnen wir mit dem Algorithmus aus Beispiel 3. Wir werden zeigen,
dass jede Wahl
(1)
r>
k−1
ε
einen ε-approximierbaren Algorithmus ergibt. Für eine ausgewählte Konstante r
beschreiben wir also den entsprechenden Algorithmus.
Approximierender Algorithmus Ar für SIT(k):
1: sortiere t1 ≥ t2 ≥ · · · ≥ tn
2: finde für die Eingabe t1 , . . . , tr die optimale Planung Sopt : {1, . . . , r} → {1, . . . , k}
3: for m = 1 to k do
182
4:
5:
6:
7:
8:
9:
10:
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
P
Tm := Sopt (i)=m ti
end for
for i = r + 1 to n do
m := ein Index mit Tm = min{T1 , . . . , Tk }
S(i) := m
Tm := Tm + ti
end for
Korrektheit: klar
Zeitkomplexität: Für jede Konstante r hat dieser Algorithmus dieselbe Zeitkomplexität O(n · log n) wie oben in Beispiel 3. Genauer: der Algorithmus braucht die
Zeit
O(n log n + k r+1 ).
Für jede Konstante r ist dies einfach O(n log n). Wenn aber ε in (1) gegen Null
geht, wächst r und die Zeitkomplexität steigt exponentiell.
In der Tat kann die optimale Zuordnung in Zeile 2 wie folgt gefunden werden: wir
durchsuchen alle k r möglichen Zurodnungen: für jede Zuordnung S berechnen wir
in der Zeit O(k) die gesamte Bearbeitungszeit T (S), die die m Arbeiten unter der
Planung S dauern, und dann finden wir in der Zeit O(k r ) das Minimum aller T (S).
Schritt 2 dauert also O(k · k r ) Zeiteinheiten.
O(k k/ε )
Zeiteinheiten und der Algorithmus hat also die Zeitkomplexität O(n · log n + k M +1 ).
Approximierung: Wir beweisen, dass unser Algorithmus ε-approximierbar ist, falls
(1) gilt:
(2)
aus r ≥
T − Topt
k
folgt
≤ε
ε
Topt
Beweis. T sei der Zeitbedarf der Zuordnung, die unser Algorithmus findet. Es
muß mindestens eine Aufgabe Wi geben, die genau zur Zeit T beendet wird. Falls
i ≤ r, ist Wi eine der optimal zugeordneten Aufgaben W1 , . . . , Wr – also stimmt der
Zeitbedarf T (zufällig) mit dem (optimalen) Zeitbedarf für die ersten r Aufgaben
überein und ist folglich selber optimal, T = Topt , was (2) beweist. Wir können also
(3)
i>r
annehmen. Also erfolgt die Zuordnung der Aufgabe Wi durch den obigen Algorithmus A. Die Aufgabe Wi beginnt zur Zeit T − ti . Daraus folgt, dass alle k Maschinen
im Zeitraum [0, T − ti ) durchgängig beschäftigt sind. Falls es nämlich eine Maschine
geben sollte, deren Tätigkeit zur Zeit T0 < T − ti aufhört, würde der Algorithmus
A die Aufgabe Wi auf dieser Maschine zum Zeitpunkt T0 beginnen lassen (denn
A bevorzugt die weniger beschäftigten Maschinen) und somit würde Wi nicht zur
Zeit T enden. Die Gesamtarbeitszeit aller k Maschinen im Zeitraum [0, T − ti ), also
einem Intervall der Länge T − ti , beträgt also k(T − ti ). Aber der Algorithmus A
verplant nur Aufgaben Wj mit j < i in diesem Zeitraum (da Wi selbst erst zur Zeit
T − ti anfängt). Im Intervall [0, T − ti ) werden also nur die Aufgaben W1 , . . . , Wi−1
bearbeitet. Die Gesamtarbeitszeit k(T − ti ) ist also höchstens so groß wie die Zeit
t1 + · · · + ti−1 , die die Bearbeitung der Aufgaben W1 , . . . , Wi−1 verlangt:
(4)
k(T − ti ) ≤ t1 + · · · + ti−1 .
Es gilt also
(5)
T ≤
t1 + · · · + ti−1
+ ti .
k
6.11. APPROXIMATION VON OPTIMIERUNGSPROBLEMEN
183
Anderseits dauern alle n Aufgaben insgesamt t1 + · · · + tn Zeiteinheiten. Die optimale Zuordnung ergibt einen Zeitbedarf von Topt Zeiteinheiten, dabei sind die k
Maschinen maximal kTopt Zeiteinheiten aktiv (falls alle die ganze Zeit beschäftigt
sind). Daraus folgt
kTopt ≥ t1 + · · · + tn .
(6)
Dann gilt
Topt ≥
(7)
t1 + · · · + t n
t1 + · · · + ti−1
≥
.
k
k
Die Kombination von (5) und (7) ergibt
T − Topt ≤
t1 + · · · + ti−1
t1 + · · · + ti−1
+ ti −
= ti
k
k
Aus (2) wissen wir, dass ti ≤ tr (denn i > r), also
T − Topt ≤ tr .
(8)
Jetzt benutzen wir (6) nochmals: da t1 ≥ t2 · · · ≥ tn , gilt
Topt ≥
t1 + · · · + t n
t1 + · · · + t r
r · tr
≥
≥
k
k
k
und kombiniert mit (8), bekommen wir
T − Topt
k
tr
≤ r·tr = .
Topt
r
k
(9)
Da r ≥
k
ε
ist, folgt
k
r
≤ ε, also ist (9) die gewünschte Ungleichung.
Satz 1. Für kein ε > 0 gibt es einen ε-approximierenden Algorithmus für TSP,
falls P 6= N P.
Beweis. Wir wissen, dass HAMILTONSCHER KREIS ein N P-vollständiges Problem ist. Wir beweisen, dass wir einen Algorithmus A der Klasse P für HAMILTONSCHER KREIS finden können, falls ein ε-approximierender Algorithmus Aε
für TSP gegeben ist – es folgt, dass P = N P. Ein ungerichteter Graph G als Eingabe
wird von A wie folgt bearbeitet:
Der Algorithmus Aε wird auf das TSP angewendet mit n Städten und
(
1
falls (i, j) eine Kante von G ist
di,j =
2 + dεne falls nicht,
wobei dεne die kleinste ganze Zahl ≥ εn ist. Bezeichnen wir mit c die Kosten der
Tour, die Aε findet. Der Algorithmus A liefert die Antwort
JA genau dann, wenn c ≤ (1 + ε)n.
Korrektheit des Algorithmus A: wir beweisen
G hat einen Hamiltonschen Kreis ⇐⇒ c ≤ (1 + ε)n.
In der Tat:
184
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
1. Jeder Hamiltonsche Kreis von G besteht aus n Kanten, also betragen die
Kosten copt = n. Da Aε ε-approximierend ist, gilt also
c−n
≤ε
n
und somit
c ≤ (ε + 1)n.
2. Falls die gefundene Rundreise der Bedingung c ≤ (1 + ε)n genügt, zeigen wir,
dass sie nur Kanten aus G enthält, also einen Hamiltonschen Kreis in G bildet.
Dazu reicht es, c < 2 + dεne + (n − 1) zu beweisen, denn jede Rundreise, die
mindestens einmal die Kanten von G verläßt, kostet mindestens 2 + dεne (=
Kosten einer Kante außerhalb von G) plus n−1 (die untere Grenze der Kosten
der anderen n − 1 Kanten). Wegen εn < dεne + 1 folgt
c ≤ (ε + 1)n < n + dεne + 1 = 2 + dεne + (n − 1).
Zeitkomplexität des Algorithmus A: für den Algorithmus Aε existiert ein Polynom
p(n), so dass Aε die Rundreise in der Zeit p(n) findet. Dann dauert die Bearbeitung
des Graphen G höchstens O(n2 ) Schritte für die Konstruktion von TSP und dann
p(n) Schritte für Aε , insgesamt also O(n2 + p(n)) Schritte. Das bedeutet, dass A
in der Klasse P liegt – im Widerspruch zur N P-Vollständigkeit von HAMILTONSCHEM KREIS.
Zusammenfassung: Für Optimierungsprobleme, für die wir keinen effizienten Algorithmus finden können, können wir versuchen, approximierbare Algorithmen zu
finden. Es gibt Aufgaben, die sogar für jedes ε einen ε-approximierbaren Algorithmus besitzen, z.B. SIT(k). Leider gibt es aber wichtige Optimierungsaufgaben, die
keinen ε-approximierbaren Algorithmus erlauben, z.B. TSP.
6.12
Raumkomplexität
Bisher haben wir einen Algorithmus als effizient betrachtet, falls er wenig Zeit
braucht. Ein anderer wichtiger Gesichtspunkt ist der Speicherbedarf eines Algorithmus. Wie die Zeitkomplexität ist auch die Raumkomplexität prinzipiell von der
Implementation unabhängig, falls wir nur die Frage stellen, ob polynomial großer
Speicher genügt. Deswegen können wir wieder Turingmaschinen als Berechnungsmodell verwenden. Wir sagen, dass eine TM die Raumkomplexität s(n) hat, wobei s(n) eine Funktion über der Menge
aller natürlichen Zahlen ist, falls für
jede Eingabe w der Länge n die TM hält und der Kopf höchstens s(n) Bandfelder
durchgegangen ist.
Definition. Wir bezeichnen mit
PSPACE
die Klasse aller formalen Sprachen, die von einer TM mit polynomialer Raumkomplexität akzeptiert werden können. Genauer: eine Sprache L gehört zur Klasse
PSPACE, falls es eine Turingmaschine M und ein Polynom p(n) gibt, so dass
L = L(M ) und M hat die Raumkomplexität p(n).
Bemerkung 1.
1. Die vorher eingeführten Klassen P und N P werden oft
PT IME und N PT IME
bezeichnet, um sie von PSPACE zu unterscheiden.
6.12. RAUMKOMPLEXITÄT
185
2. Es gilt
PT IME ⊆ PSPACE
denn in einem Schritt kann eine TM nur ein Bandfeld besuchen. Es folgt, dass
Probleme wie 2-FÄRBUNG, 2-ERFÜLLBARKEIT usw. in PSPACE liegen.
3. Das Problem der UNIVERSALITÄT REGULÄRER AUSDRÜCKE (Beispiel
6 in 6.2) gehört nicht zur Klasse PSPACE.
4. Die Klasse N PSPACE “, die zu N PT IME analog wäre, brauchen wir nicht
”
einzuführen:
Satz 1 (Savitch-Satz). Jede nichtdeterministische Turingmaschine mit polynomialer Raumkomplexität kann durch eine (deterministische) Turingmaschine mit polynomialer Raumkomplexität simuliert werden.
Beweis. Sei M eine NTM mit Raumkomplexität p(n) > n, dann konstruieren wir
eine (deterministische) Turingmaschine M ∗ , mit der Raumkomplexität O(p2 (n)),
die dieselbe Sprache akzeptiert. Wir können annehmen, dass M das Band löscht,
bevor sie im finalen Zustand hält. Dann ist (qF , #) die einzige akzeptierende Konfiguration.
Es gibt eine Konstante C, so dass die Berechnung eines Wortes der Länge n höchstens
2Cp(n)
Konfigurationen durchläuft. In der Tat haben die Konfigurationen die Form
(q, s1 . . . si . . . sp(n) ),
wobei q ein Zustand ist, s1 . . . sp(n) ist der Inhalt des Bandes und i ist die Kopfposition. Falls die Maschine
r Zustände
und
m Symbole in Σ ∪ {#}
hat, ist die Zahl der Konfigurationen gleich r (für Zustände q) mal p(n) (für Kopfpositionen i) mal der Zahl mp(n) aller Wörter s1 . . . sp(n) über Σ ∪ {#}. Es gilt
rp(n)mp(n) < rmp(n) mp(n) = rm2p(n) < 2Cp(n)
für eine geeignete Konstante C.
Es folgt, dass für jedes von M akzeptierte Wort s1 . . . sn sn eine akzeptierende
Berechnung von höchstens 2Cp(n) Schritten existiert. In der Tat, nehmen wir die
kürzeste akzeptierende Berechnung von s1 . . . sn , dann wird keine der 2C p(n) Konfigurationen wiederholt. Es gilt:
M akzeptiert s1 . . . sn genau dann, wenn (q0 , s1 . . . sn ) `∗ (qF , #).
Und das können wir durch die Begrenzung 2Cp(n) der Zahl der Schritte wie folgt
verschärfen:
Für zwei Konfigurationen K und K 0 schreiben wir
REACH(K, K 0 , i) = true
186
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
falls in höchstens 2i Berechnungsschritten aus der Konfiguration K die Konfiguration K 0 erreicht werden kann. (Z.B. bedeutet REACH(K, K 0 , 0), dass die Konfiguration K 0 in höchstens einem Schritt aus Konfiguration K erreicht werden kann –
d.h., entweder K = K 0 oder K 0 ist eine Folgekonfiguration von K.). Es gilt
M akzeptiert s1 . . . sn genau dann,
wenn REACH(K, K 0 , Cp(n)) = true für K = (q0 , s1 . . . sn ), K 0 = (qF , #)
Es genügt also, einen Algorithmus zu finden, der die Antwort REACH(K, K 0 , i)
mit polynomialer Raumkomplexität für alle Paare K, K 0 von Konfigurationen und
alle Zahlen i = 0, . . . , Cp(n) berechnet. Die Idee ist, dass es für i = 0 nur die
Überprüfung ist, ob K 0 eine der Folgekonfigurationen ist, die in O(1) Zeiteinheiten
berechnet wird, und aus dem Fall REACH(−, −, i) können wir REACH(−, −, i +
1) wie folgt berechnen: Seien K, K 0 Konfigurationen, für die REACH(K, K 0 , i +
1) = true ist. Also gibt es eine Berechnung in 2i+1 = 2 · 2i Schritten; sei K die
Konfiguration, die aus K in dieser Berechnung in 2i Schritten erreicht wird – dann
gilt REACH(K, K, i) = true und REACH(K, K 0 , i) = true. Umgekehrt: falls es
eine Konfiguration K gibt mit
REACH(K, K, i) = true = REACH(K, K 0 , i),
gilt bestimmt REACH(K, K 0 , i + 1).
Die Antwort REACH(K, K 0 , i) kann für i = 0, . . . , Cp(n) also rekursiv durch den
folgenden deterministischen Algorithmus berechnet werden:
i = 0 : Antwort true genau dann, wenn K = K 0 oder K ` K 0 .
i + 1 : Antwort true genau dann, wenn es eine Konfiguration K gibt mit
REACH(K, K, i) ∧ REACH(K, K 0 , i) = true.
Für i = 0 muß dieser Algorithmus nur die zwei Konfigurationen K, K 0 (Wörter
der Länge p(n) + 1) speichern, also ist der Raumbedarf O(p(n)). Für i + 1 müssen
wir, für den rekursiven Ablauf, i speichern, und neben den Eingaben K und K 0
wird die lokale Variable K gespeichert. Dann wird REACH(K, K, i) überprüft.
Falls die Antwort true ist, können wir denselben Raum (!) wieder benutzen, um
REACH(K, K 0 , i) zu überprüfen. Da i ≤ Cp(n) und K, K 0 , K Wörter der Länge
p(n) + 1 sind, wird in einem Schritt der Rekursion Raum O(p(n)) genügen. Die
Rekursion hat Cp(n) Schritte, also brauchen wir insgesamt Raum O(Cp2 (n)).
Korollar 1. N PT IME ⊆ PSPACE
Beweis. In der Tat sagt uns der Savitch-Satz, dass PSPACE = N PSPACE. Und
N PT IME ⊆ N PSPACE ist analog zur Bemerkung 1 Nr. 2 oben.
Bemerkung 2. Die Klasse PSPACE enthält also alle Probleme, für die es (Zeit-)
effizient entscheidbar ist, ob eine angebotene Lösung wirklich das Problem löst. Z.
B. TSP, 3-FÄRBBARKEIT usw. Es ist nicht bekannt, ob N PT IME = PSPACE
gilt.
Wir zeigen jetzt ein interessantes Beispiel eines Prolems, für das nicht klar ist, ob es
zu N PT IME gehört, da es keinen vernünftigen Begriff von angebotener Lösung“
”
gibt, das aber zu PSPACE gehört.
Beispiel 1 (QUANTIFIZIERTE BOOLESCHE FORMELN).
Eingabe: Eine quantifizierte Boolesche Formel φ ohne freie Variablen.
6.12. RAUMKOMPLEXITÄT
187
Ausgabe: JA genau dann, wenn φ den Wert true hat.
Bisher sprachen wir nur über Boolesche Formeln ohne Quantoren (∀x), (∃x). Die
quantifizierten Booleschen Formeln, QBF, in Variablen xi (i = 1, . . . , n) können wie
folgt definiert werden:
1. Jede Variable xi ist eine QBF
2. Die Konstanten true und false sind QBF
3. Falls E1 , E2 zwei QBF sind, sind auch
E1 ∨ E2 , E1 ∧ E2 , E1 → E2 und ¬E2
QBF’n.
4. Falls E eine QBF ist, sind auch
(∀x)E und (∃x)E
(für jede Variable x) QBF’n.
Das heißt: die Menge aller QBF ist die kleinste Menge, für die 1 – 4 gilt. Beispiel:
E = (∀x)(∃y)(x → ((∀x)(¬y ∨ x))).
Dies ist eine geschlossene QBF, dass heißt, alle Variablen werden quantifiziert (der
innere Quantor (∀x) wirkt über die Formel (¬y ∨ x), der äußere über (∃y)(x →
((∀x)(¬y ∨ x))) ). Jede geschlossene Formel hat einen Wert, den wir bekommen, indem wir für jede quantifizierte Variable die Belegung mit true oder false betrachten.
Zum Beispiel in E müssen wir, aufgrund des äußeren (∀x), die zwei Formeln
E1 = (∃y)(true → ((∀x)(¬y ∨ x)))
und
E2 = (∃y)(false → ((∀x)(¬y ∨ x)))
bewerten: falls beide Werte true sind, ist E true (sonst false). Also
W ERT (E) = W ERT (E1) ∧ W ERT (E2)
Um den Wert von E1 zu bewerten, müssen wir die Werte von
E11 = true → ((∀x)(¬true ∨ x))
und
E12 = true → ((∀x)(¬false ∨ x))
kennen: falls einer der Werte true ist, ist E1 true (sonst false), also
W ERT (E1 ) = W ERT (E11 ) ∨ W ERT (E12 ).
Der Wert von E11 ist false: betrachten wir die Belegung x = true. Aber der Wert
von E12 ist true, da ¬false ∨ x = true ∨ x den Wert true hat für x = false, true.
Also
W ERT (E1 ) = false ∨ true = true.
Analog kann man zeigen, dass W ERT (E2 ) = true, also
W ERT (E) = true.
188
KAPITEL 6. KOMPLEXITÄT VON ALGORITHMEN
Im allgemeinen definieren wir die Menge V ar(E) aller freien Variablen einer QBF
wie folgt:
V ar(xi ) = {xi }
V ar(true) = V ar(false) = ∅
V ar(E1 ∨ E2 ) = V ar(E1 ) ∪ V ar(E2 ), analog mit ∧, →
V ar(¬E) = V ar(E)
V ar((∀x)E) = V ar((∃x)E) = V ar(E) − {x}
Eine QBF heißt geschlossen, falls sie keine freien Variablen hat, falls also V ar(E) =
∅. Den Wert
W ERT (E)
einer geschlossenen QBF definieren wir wie folgt:
W ERT (true) = true
W ERT (false) = false
W ERT (E1 ∨ E2 ) = W ERT (E1 ) ∨ W ERT (E2), analog mit ∧, →
W ERT (¬E) = ¬W ERT (E)
W ERT ((∀x)E) = W ERT (E(true/x)) ∧ W ERT (E(false/x))
W ERT ((∃x)E) = W ERT (E(true/x)) ∨ W ERT (E(false/x))
Hier ist
E(true/x)
die QBF, die wir aus E bekommen, indem alle freien Vorkommen der Variablen x
durch true ersetzt werden, analog E(false/x).
Bemerkung 3. Das Problem QBF gehört zur Klasse PSPACE.
In der Tat existiert ein Algorithmus mit Raumkomplexität O(n2 ), wobei n die Länge
des Wortes E ist, der entscheidet, ob E true ist. Hier bezeichnet E eine geschlossene
Boolesche Formel. Den Wert
W ERT (E) = true oder false
berechnen wir rekursiv wie folgt
• falls E = true, ist W ERT (E) = true
• falls E = false, ist W ERT (E) = false
• falls E = ∀xi (E 0 ) oder E = ∃xi (E 0 ), berechnen wir erst (rekursiv) den Wert
von E(true/xi ) Dann speichern wir das Ergebnis (in 1 Bit) und auf demselben
Raum (!) berechnen wir E(false/xi ), speichern das Ergebnis (wieder 1 Bit)
und entscheiden, ohne zusätzlichen Raum, den Wert von E aufgrund dieser
zwei Werte.
Algorithmus für QBF
Eingabe: E, eine QBF ohne freie Variablen.
Ausgabe: der Wert von E, W ERT (E), rekursiv berechnet:
W ERT (true) := true;
W ERT (false) := false;
W ERT (∀xi (E)) := W ERT (E(true/xi )) ∧ W ERT (E(false/xi ));
W ERT (∃xi (E)) := W ERT (E(true/xi )) ∨ W ERT (E(false/xi ));
6.12. RAUMKOMPLEXITÄT
189
Korrektheit: Jede QBF kann in die Form mit Quantoren nach außen gebracht werden. Falls die Formel in dieser Form keine freien Variablen besitzt, muß sie eine der
4 Typen oben sein. Die Rekursion erfolgt nach der Zahl k aller Quantoren von E.
Für k = 0 ist E = true oder E = false, falls k > 0 ist, gilt E = ∀xi (E) oder
E = ∃xi (E), wobei für E die Zahl aller Quantoren k − 1 ist. Nach k Rekursionsschritten wird also W ERT (E) berechnet sein.
Raumkomplexität: Sei E eine QBF der Länge n. Die Zahl k aller Quantoren in
E erfüllt k < n. Die Rekursion hat also Tiefe n und in jedem rekursiven Schritt
brauchen wir, wie oben erklärt wurde, nur Raum um 2 Bit größer als der Raum
des nächsten Schrittes. Das Wort E hat Länge n, also haben die in der Rekursion
gespeicherten Wörter Länge O(n), was mit n rekursiven Schritten Raum O(n2 )
verlangt.
Offenes Problem: Liegt QBF in N PT IME?
In der Tat scheint dies unwahrscheinlich, denn QBF ist PSPACE-vollständig ,
das heißt für jedes Problem der Klasse PSPACE gibt es eine Reduktion auf QBF
in polynomialer Zeit (!). Falls also QBF ∈ N PT IME ist, folgt N PT IME =
PSPACE.