Anleitung Deutsch
Werbung

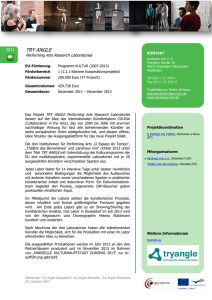
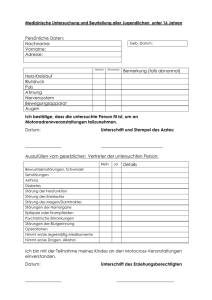
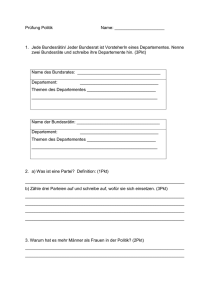
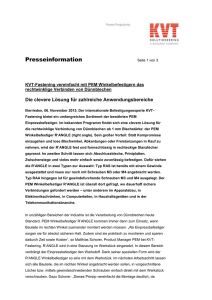
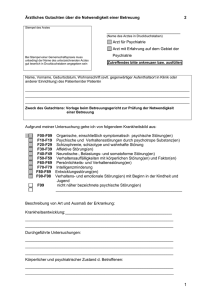
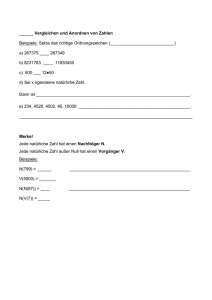
Firmware version: 2.1 GUI version: 2.1 Board version: siehe Abbildung Der Anschluss an einen Computer Man verbindet das Controllerboard mit dem PC mit einem USB-Kabel und natürlich den Sensor mit dem entsprechenden Kabel mit dem Board. Informationen zum Treiber, falls gewünscht findet man unter „CP2102“. Unter Windows installiert sich der Treiber automatisch. GUI findet man hier : http://www.simplebgc.com/eng/downloads/ ggf. ist ein Firmware Update nötig siehe auch dort. Die GUI läuft als Java Anwendung. Und sieht dann so aus (wenn man die Sprache auf Deutsch umgestellt hat): 26/07/13 1 Flyduino.net Eigentlich ist diese Benutzeroberfläche selbsterklärend ! Hilfe liefert auch häufig der Inhalt des Fensters unten, der auf die Maus reagiert. Beschreibung der Parameter PID controller Einstellung erfolgen separat für jede Achse. • • P (proportional) bestimmt die Reaktion auf die Störung. Je größer die Störung je schneller die Antwort. Man kann es auch erklären als eine Verstärkung des Sensorsignals bevor es an die Motoren geliefert wird. Wie soll es eingestellt werden: langsam beginnend bei Null erhöhen bis eine gute Stabilität erreicht ist. Sollte der Wert zu hoch werden kann sich das System aufschwingen (sichtbare Schwingungen). Wichtig! Falls Vibrationen vom Hauptrahmen an das Kameragestell weitergeleitet werden, kann dass zu einem Selbstaufschwingen und Instabilität führen. Daher sollten Schwingungsdämpfer guter Qualität verwendet werden. Falls nur niederfrequente Scchwingungen auftreten sollten kann man sie unterrdrücken, in dem man die D-Parameter erhöht. Erhöhe D um 1 bis 2 Einheiten falls dann die Vibrationen aufhören, kann man P weiter erhöhen. • D (differentiell) definiert die Beschränkung der Reaktion auf die Störung. Es hilft, niederfrequente Schwingungen zu vermeiden. Man sollte den Wert so nahe bei Null als möglich zu halten. • I (integral) definiert die Reaktionszeit auf die Kommandos vom Empfänger. Ein niedriger Wert ergibt langsame und sanfte Reaktionen an den Operator, allerdings verlangsamt es dann auch die Bewegungen bei großen Abweichungen. In der Sektion Motor Configuration: • • Power definiert die Leistung für jeden Motor. Man kann Werte zwischen 0 und 255 einstellen, wobei 255 dem Maximum der zurverfügungstehenden Leistung entspricht. Die Grundregeln zur Einstellung lauten: • Motoren nicht überhitzen! Zu hohe Temperatur (über 80°C) können die magnetischen Eigenschaften dauerhaft schädigen. • Niedrige Leistung heißt auch geringes Drehmoment – gimbal kann seine Position verlieren und kann dies nicht wieder ausgleichen. • Falls du die PID-Werte eingestellt hast und dich dann entscheidest die Leistungswerte her aufzusetzen, solltest du die PID-Werte korrigieren, denn Leistung und Verstärkung verhalten sich proportional. • Umkehren – legt die Richtung der Motordrehrichtung fest. Es ist wichtig die richtige Einstellung zu wählen. • Eine automatische Einstellung ist möglich. Um die Selbsteinstellung zu starten setze die Werte für P,I und D auf Null, stelle die “Power” entsprechend den oben genannten Vorgaben (oder als generelle Vorgabe auf den Wert 100) ein. Richte die Kamera-Platte horizontal aus ( das mag nicht ganz präzise gelingen weil der Magnetfeldsensor in Zufallsposition ist) und betätige dann die AUTO Taste. Die Kamera wird ein wenig hin und her zucken während der Kalibrierung. • Anzahl POLE – hier wird die Anzahl der Pole des Motor eingegeben. Die AUTO Prozedur erkennt meistens die Anzahl richtig. Man kann die Anzahl auszählen. 26/07/13 2 Flyduino.net Typischerweise sind es 14 Pole. • Externer FC Wert – Diese Einstellungen sind nötig wenn eine Verbindung zum Flugcontroller hergestellt wird. Diese Verbindung hilft die Qualität der Stabilisierung zu verbessern. Viele Flugcontroller haben Ausgänge für Kamera-Gimbal Servos für die Roll und Pitch Achsen. Man sollte diese Ausgänge etwas auf einen Bereich von + 30°bis - 30° einstellen. 26/07/13 3 Flyduino.net • RC min.angle, RC max.angle ( im Reiter RC Settings) – definiert den Einstellbereich des Winkels der Kameraneigung von Minimum zum Maximum, der vom Empfänger kontrolliert wird. Um die Steuerungssignale (control) zu invertieren, setze die ersten Werte einfach größer als die zweiten. Z.B. wenn die Kamera von horizontal (0°) nach senkrecht abwärts (90°) geneigt werden soll, setze min.angle=0, max.angle=90 (oder 90..0 für inverse) • 26/07/13 4 Flyduino.net Hier ein Bild zur Illustration des Software-Updates. Und natürlich hilft auch die englische Version des Manuals!!! Ist allerdings mit den Bildern zurzeit nicht auf dem neuesten Stand. Siehe also hier: http://www.simplebgc.com/files/v10/SimpleBGC_manual_1_2_eng.pdf 26/07/13 5 Flyduino.net