Funktionale Datenstrukturen
Werbung

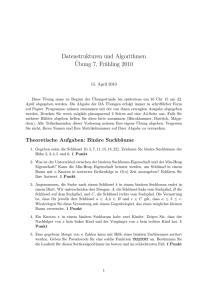
Funktionale Datenstrukturen In diesem Kapitel behandeln wir die Implementierung ausgewählter Datenstrukturen in Haskell. Wir haben bereits Listen zur Darstellung von Sequenzen kennengelernt sowie Suchbäume zur Darstellung von Mengen vergleichbarer Elemente. Queues Listen entsprechen im Wesentlichen der Stack-Abstraktion, was die folgende StackImplementierung verdeutlicht: type Stack a = [a] emptyStack :: Stack a emptyStack = [] isEmptyStack :: Stack a -> Bool isEmptyStack = null push :: a -> Stack a -> Stack a push = (:) top :: Stack a -> a top = head pop :: Stack a -> Stack a pop = tail Alle definierten Operationen haben konstante Laufzeit. Eng verwandt mit Stacks sind Queues. Während Stacks nach dem Last-In First-Out (LIFO) Prinzip funktionieren, arbeiten Queues nach dem First-In First-Out (FIFO) Prinzip. Die Elemente einer Queue werden also in der Reihenfolge entnommen, in der sie eingefügt wurden. Auch Queues könnten wir in Haskell als Listen implementieren: type Queue a = [a] emptyQueue :: Queue a emptyQueue = [] isEmptyQueue :: Queue a -> Bool isEmptyQueue = null 1 enqueue :: a -> Queue a -> Queue a enqueue x q = q ++ [x] next :: Queue a -> a next = head dequeue :: Queue a -> Queue a dequeue = tail Wie die Operationen top und pop haben auch next und dequeue konstante Laufzeit in der Größe des Arguments. Die Laufzeit von enqueue ist aber linear, da die ++-Funktion mit der gegebenen Queue als erstem Argument aufgerufen wird. Hätten wir Queues als Listen in umgekehrter Reihenfolge dargestellt, dann könnten wir enqueue mit konstanter Laufzeit (durch (:)) implementieren müssten für next und dequeue aber die last bzw. die init-Funktion verwenden, die beide lineare Laufzeit haben. Können wir eine Implementierung von Queues angeben, die sowohl enqueue als auch next und dequeue in konstanter Laufzeit erlaubt? Da wir sowohl auf den Anfang (wegen enqueue) als auch auf das Ende der Liste (wegen next und dequeue) in konstanter Zeit zugreifen wollen, verwenden wir für die Darstellung zwei Listen: data Queue a = Queue [a] [a] emptyQueue :: Queue a emptyQueue = Queue [] [] isEmptyQueue :: Queue a -> Bool isEmptyQueue (Queue xs ys) = null xs && null ys Die erste Liste enthält die ältesten Elemente, also die, die als nächstes entfernt werden, die zweite Liste hingegen enthält die neuesten Elemente, also die, die als letztes eingefügt wurden und zwar in umgekehrter Reihenfolge. Um einer Queue ein Element hinzuzufügen, können wir es daher vorne der zweiten Liste hinzufügen. Um eines zu entfernen, nehmen wir es aus der ersten Liste. enqueue :: a -> Queue a -> Queue a enqueue x (Queue xs ys) = Queue xs (x:ys) next :: Queue a -> a next (Queue (x:_) _) = x dequeue :: Queue a -> Queue a dequeue (Queue (_:xs) ys) = Queue xs ys 2 Die Implementierungen von next und dequeue sind noch unvollständig. Beide Funktionen liefern kein Ergebnis, wenn die erste Liste leer ist, die zweite aber nicht. Dieser Fall erfordert es, die zweite Liste, die die Elemente ja in umgekehrter Reihenfolge speichert, komplett zu durchlaufen, um das nächste Element zu entfernen. Um diesen ungünstigen Fall zu vermeiden, legen wir eine Invariante für den QueueDatentyp fest: Wenn die erste Liste leer ist, ist auch die zweite leer. Gilt diese Invariante, so finden wir bei dequeue das zu entfernende Element immer in der ersten Liste, da diese immer ein Element enthält, wenn die zweite eines enthält. Die oben gezeigten Implementierungen von enqueue und dequeue erhalten diese Invariante aber nicht aufrecht: Nach dem Einfügen eines Elementes in eine leere Queue ist die erste Liste leer, die zweite aber nicht. Außerdem tritt diese Situation ein, wenn die erste Liste vor dem Aufruf von dequeue einelementig ist. Wir implementieren daher eine Konstruktor-Funktion queue, die sicher stellt, dass die zweite Liste leer ist, falls die erste leer ist: queue :: [a] -> [a] -> Queue a queue [] ys = Queue (reverse ys) [] queue xs ys = Queue xs ys Da die Elemente in der zweiten Liste in umgekehrter Reihenfolge gespeichert werden, müssen wir die zweite Liste umdrehen, bevor wir sie als neue erste Liste verwenden. Mit der queue-Funktion können wir enqueue und dequeue wie folgt definieren: enqueue :: a -> Queue a -> Queue a enqueue x (Queue xs ys) = queue xs (x:ys) dequeue :: Queue a -> Queue a dequeue (Queue (x:xs) ys) = queue xs ys Im Unterschied zu den vorherigen Definitionen haben wir die queue-Funktion statt des Queue-Konstruktors in den rechten Regelseiten verwendet. Um zu testen, ob eine Queue leer ist, brauchen wir dank der Invariante nur noch zu testen, ob die erste Liste leer ist: isEmptyQueue :: Queue a -> Bool isEmptyQueue (Queue xs _) = null xs 3 Die Implementierung der next-Funktion ist jetzt korrekt, da die Invariante verhindert, dass die zweite Liste Elemente enthält, wenn die erste Liste leer ist. Trotz des Aufrufs von queue in enqueue, hat enqueue konstante Laufzeit: Der potentiell teure Aufruf von reverse passiert nur dann, wenn die erste Liste xs leer ist, und in dem Fall ist auf Grund der Invariante auch ys leer also das Argument von reverse einelementig. Die Laufzeit von dequeue ist im schlechtesten Fall jedoch noch immer linear: Falls die erste Liste einelementig ist und die zweite n − 1 Elemente enthält, benötigt der queue Aufruf (auf Grund des reverse Aufrufs) n − 1 Schritte. Dieser Fall tritt zum Beispiel dann ein, wenn n Elemente hintereinander mit enqueue einer leeren Queue hinzugefügt werden. Haben wir gegenüber der einfachen Implementierung mit einer einzigen Liste überhaupt etwas gewonnen? Zwar ist die pessimale Laufzeit von dequeue linear, die amortisierte Laufzeit der beiden Operationen ist aber konstant. Bei amortisierter Laufzeit betrachtet man nicht die Laufzeit einer einzigen Operation sondern die Laufzeit mehrerer Operationen hintereinander: Wenn beliebige n QueueOperationen hintereinander ausgeführt werden und die Gesamtlaufzeit dabei immer in O(n) liegt, dann ist die amortisierte Laufzeit der Operationen konstant. Dabei können einzelne Aufrufe der Operationen durchaus schlechtere Laufzeit haben, solange dabei nie die Gesamtlaufzeit beeinträchtigt wird. Wir betrachten beispielhaft die folgende Hintereinanderausführung mehrerer QueueOperationen: dequeue (dequeue (dequeue (enqueue 1 (enqueue 2 (enqueue 3 emptyQueue))))) Mit der einfachen Implementierung ergibt sich daraus dequeue (dequeue (dequeue ((([] ++ [3]) ++ [2]) ++ [1]))) Da ++ linksassoziativ aufgerufen wird, ist hier die Gesamtlaufzeit quadratisch in der Anzahl der eingefügten Elemente also auch quadratisch in der Anzahl der verwendeten Operationen. Die amortisierte Laufzeit der beiden Queue-Operationen ist also linear, denn die n-fache Anwendung einer Operation mit linearer Laufzeit führt zu quadratischer 4 Gesamtlaufzeit. In diesem Fall ist die amortisierte Laufzeit der Operationen also nicht besser als die pessimale. Betrachten wir das selbe Beispiel mit der zweiten Queue-Implementierung ergibt sich (verkürzt): = = = = = = = = deq (deq (deq (enq 1 (enq 2 (enq 3 e))))) deq (deq (deq (enq 1 (enq 2 (q [] [3]))))) deq (deq (deq (enq 1 (enq 2 (Q [3] []))))) deq (deq (deq (enq 1 (Q [3] [2])))) deq (deq (deq (Q [3] [1,2]))) deq (deq (q [] [1,2])) deq (deq (Q [2,1] [])) -- teuer! deq (Q [1] []) Q [] [] Die Gesamtlaufzeit dieser Aufrufe ist linear in der Anzahl der Operationen, da fast alle Schritte konstante Laufzeit haben. Nur ein Schritt hat lineare Laufzeit, die Gesamtlaufzeit bleibt aber linear in der Anzahl der Operationen. Daher ist die amortisierte Laufzeit der Operationen (anders als die pessimale Laufzeit) konstant. Diese Aufrufkette verdeutlicht, dass der teure reverse-Aufruf nur selten auftritt. Im Allgemeinen muss jedes eingefügte Element genau einmal “durch reverse hindurch” bevor es wieder entfernt wird. Die reverse-Aufrufe sind so selten, dass die Gesamtlaufzeit einer beliebigen Folge von Queue-Operationen immer lineare Gesamtlaufzeit hat. Obwohl die pessimale Laufzeit von dequeue linear ist, ist die gezeigte QueueImplementierung auf Grund der konstanten amortisierten Laufzeit der Operationen sehr brauchbar. Arrays In vielen imperativen Programmiersprachen werden Arrays bereit gestellt. Imperative Arrays erlauben die Abfrage und Manipulation von Elementen an einer gegebenen Position mit konstanter Laufzeit. In Haskell gibt es eine (im Modul Data.Array) vordefinierte Anbindung an Arrays, die es erlaubt, ein Element an einer gegebenen Position in konstanter Zeit abzufragen und Arrays in linearer Zeit aus Listen zu erzeugen. Allerdings hat die Operation zum Ändern eines Index lineare Laufzeit. Sie kopiert das gesamte Array, da Seiteneffekte in reinen funktionalen Sprachen wie Haskell nicht erlaubt sind. Insbesondere soll auch das alte Array nach dem Update unverändert zur Verfügung stehen. Können wir Arrays mit konstanter Laufzeit auch rein funktional implementieren? Wir definieren dazu den folgenden Datentyp: 5 data Array a = Entry a (Array a) (Array a) Wir stellen zunächst fest, dass alle Werte dieses Typs unendlich sind, da es keinen Fall für das leere Array gibt, doch dazu später mehr. Auch Indizes scheinen im Array-Datentyp nicht dargestellt zu werden. Die Idee dieser Implementierung ist, dass der zu einem bestimmten Index gehörige Wert an einer bestimmten Position im von Entry-Knoten erzeugten Binärbaum steht. Zum Beispiel steht das Element mit dem Index Null an der Wurzel, links davon ist ein Array mit allen ungeraden Indizes und rechts davon eines mit allen geraden Indizes. Die Teil-Arrays haben ihrerseits die selbe Struktur: Zieht man von den Indizes eins ab und dividiert das Ergebnis (mit ganzzahliger Division) durch zwei steht an der Wurzel die Null, links davon gerade Indizes und rechts ungerade. Insgesamt ergibt sich dadurch die folgende Verteilung der Indizes: 0 3 7 ... 11 ... 1 2 5 4 9 ... 13 ... 8 ... 6 12 ... 10 ... 14 ... ... Abbildung 1: Indizes in einem funktionale Array Diese Verteilung erlaubt es, die Abfrage eines Elementes effizient zu implementieren: (!) :: Array a -> Int -> a Entry x odds evens ! n | n == 0 = x | odd n = odds ! m | even n = evens ! m where m = (n-1) ‘div‘ 2 6 Wenn der Index Null ist, steht das gesuchte Element an der Wurzel. Wenn nicht suchen wir rekursiv im linken oder rechten Teil-Array, je nachdem, ob der Index ungerade (dann links) oder gerade ist (dann rechts). Der neue Index wird dabei dekrementiert und halbiert. Um zum Beispiel das Element an Position 9 nachzuschlagen, steigen wir rekursiv in den linken Teilbaum ab, da die 9 ungerade ist und suchen dort rekursiv den Index 4. Dieser ist gerade, deshalb suchen wir rekursiv im rechten Teilbaum den Index 1. Dieser Index ist wieder ungerade, also suchen wir im linken Teilbaum den Eintrag mit Index Null geben also die Wurzel dieses Teilbaums aus. Auch die Funktion zum Ändern eines Eintrags lässt sich auf diese Weise implementieren: update :: Array a -> Int -> a -> Array a update (Entry x odds evens) n y | n == 0 = Entry y odds evens | odd n = Entry x (update odds m y) evens | even n = Entry x odds (update evens m y) where m = (n-1) ‘div‘ 2 Je nachdem, ob der Index gerade oder ungerade ist, steigen wir wieder rekursiv in das rechte oder linke Teil-Array ab und manipulieren einen entsprechend angepassten Index. Die update-Funktion erzeugt dabei ein neues Array, lässt also das Argument anders als Array-Updates in imperativen Sprachen unverändert. update kopiert aber nicht das ganze Array sondern nur den Pfad von der Wurzel zum gesuchten Element. Gemeinsame Teile im Argument und Ergebnis werden geteilt, also nicht kopiert. Die Laufzeit der (!) und update-Funktionen ist logarithmisch in der Größe des Index, also insbesondere unabhängig von der Array-Größe. Wenn man ehrlich ist, ist auch in imperativen Sprachen der Array-Zugriff nicht konstant sondern logarithmisch in der Indexgröße, da alle (logarithmisch vielen) Bits des Index angesehen werden müssen, um den richtigen Eintrag zu finden. Der Vorteil funktionaler Arrays ist, dass sowohl die neue als auch die alte Variante eines Arrays nach einem Update verfügbar sind. Der zusätzliche Speicherbedarf ist dabei logarithmisch in der Indexgröße. Mit imperativen Arrays verwendet man in diesem Fall meist eine Kopie, benötigt also linearen zusätzlichen Speicherbedarf in der Array-Größe. Wie wir bereits festgestellt haben, sind alle Werte vom Typ Array a unendlich. Es stellt sich also die Frage, wie wir endliche Arrays darstellen. Das leere Array ist ein unendliches Array, das nur Fehlermeldungen enthält: emptyArray :: Array a emptyArray = Entry err emptyArray emptyArray 7 where err = error "accessed non-existent entry" Wir können aus einer Liste ein Array machen, indem wir sukzessive update auf ein leeres Array anwenden: fromList :: [a] -> Array a fromList = foldl insert emptyArray . zip [0..] where insert a (n,x) = update a n x Die Laufzeit von fromList ist O(n log n). Allerdings werden in dieser Variante viele Entry-Konstruktoren erzeugt und durch spätere update Aufrufe wieder ersetzt. Die folgende Implementierung vermeidet dies, indem sie die Eingabeliste in zwei Teile, nämlich die Elemente mit ungeradem und die mit geradem Index, aufteilt. fromList :: [a] -> Array a fromList [] = emptyArray fromList (x:xs) = Entry x (fromList ys) (fromList zs) where (ys,zs) = split xs Die split-Funktion berechnet aus einer Liste zwei, indem sie die Elemente abwechselnd der einen und der anderen hinzufügt: split :: [a] -> ([a],[a]) split [] = ([],[]) split [x] = ([x],[]) split (x:y:zs) = (x:xs,y:ys) where (xs,ys) = split zs Diese Variante von fromList hat zwar auch die Laufzeit O(n log n) erzeugt aber keine unnötigen Entry-Knoten, die sie später wieder verwirft und ist deshalb schneller. Es ist sogar möglich, fromList mit linearer Laufzeit zu implementieren (Okasaki ’97). Die hier gezeigte Implementierung von Arrays ist (mit einer weiteren wichtigen Optimierung, auf die wir hier nicht eingehen) im Modul Data.IntMap implementiert. Array-Listen Arrays erlauben anders als Listen einen effizienten Zugriff auf Elemente an einem beliebigen Index. Listen bieten anders als Arrays effiziente Funktionen zum Entfernen des ersten 8 Elements und Hinzufügen eines neuen ersten Elements. Die Funktionen (:) und tail hätten mit der beschriebenen Array-Implementierung lineare Laufzeit, da sich durch sie die Indizes aller Einträge verschieben. Array-Listen bieten wie Arrays einen effizienten Zugriff auf beliebige Elemente und wie Listen effiziente Funktionen zum Hinzufügen und Entfernen des ersten Elements. Ihre interne Darstellung ähnelt der von Binärzahlen. Eine Array-Liste ist eine Liste vollständiger, nur an Blättern beschrifteter Binärbäume, deren Höhe ihrer Position in der Liste entspricht. Hier sind beispielhaft Listen der Länge eins bis fünf dargestellt: o | 5 .-----o / \ 4 5 o-----o | / \ 3 4 5 .-----.-----o / \ /\ /\ 2 3 4 5 o-----.-----o | / \ 1 /\ /\ 2 3 4 5 Eine Array-Liste der Länge n enhält genau an den Positionen einen vollständigen Binärbaum, an denen die Binärdarstellung von n eine 1 hat (wenn man mit dem niedrigstwertigen Bit anfängt). Ein Binärbaum an Position i in der Liste enthält dabei genau 2i Elemente. Eine Array-Liste ist also eine Liste optionaler Binärbäume, wobei das letzte Element immer vorhanden sein muss. Eine Liste wie o-----.-----. | 7 ist also nicht erlaubt. Insgesamt ergeben sich die folgenden Invarianten: 9 1. Der letzte Baum ist nicht leer. 2. Jeder Binärbaum ist vollständig. 3. Ein Baum an Position i hat 2i Elemente. Diese Darstellung erlaubt es, alle erwähnten Operationen in logarithmischer Laufzeit zu implementieren. Wir stellen Array-Listen als Werte des folgenden Datentyps dar. type ArrayList a = [Bit a] data Bit a = Zero | One (BinTree a) data BinTree a = Leaf a | Fork (BinTree a) (BinTree a) Die leere Array-Liste ist die leere Liste. empty :: ArrayList a empty = [] Dank der ersten Invariante genügt es für den Leerheitstest, zu testen, ob die Liste von Bits leer ist. Eine nicht-leere Liste nur aus Zeros ist nicht erlaubt. isEmpty :: ArrayList a -> Bool isEmpty = null Wir wollen nun eine Funktion (<:) für Array-Listen definieren, die sich wie (:) für Listen verhält, also ein neues erstes Element hinzufügt. Da sich die Länge der ArrayListe dabei um eins erhöht, ist die (<:)-Funktion dem Inkrementieren einer Binärzahl nachempfunden. Wenn das niedrigste Bit Null ist, wird es auf eins gesetzt, wenn es eins ist, wird es auf Null gesetzt und die restlichen Bits werden inkrementiert. (<:) :: a -> ArrayList a -> ArrayList a x <: l = cons (Leaf x) l Wir verwenden eine Hilfsfunktion cons auf Binärbäumen, da wir im rekursiven Aufruf mehrere Elemente auf einmal zum Inkrementieren benutzen: cons cons cons cons :: BinTree a -> ArrayList a -> ArrayList a u [] = [One u] u (Zero : ts) = One u : ts u (One v : ts) = Zero : cons (Fork u v) ts 10 Statt einfach nur die Bits zu manipulieren, fügen wir einer Eins einen Binärbaum entsprechender Größe hinzu. Die Invarianten erhalten wir dadurch aufrecht, dass wir im rekursiven Aufruf einen doppelt so großen Baum verwenden, wie im Aufruf selbst. Die Bäume werden dabei nicht durchlaufen, also ist die Laufzeit von cons durch die Länge der Liste von Binärbäumen beschränkt. Diese ist wegen der ersten Invariante logarithmisch in der Länge der Array-Liste. Das folgende Beispiel zeigt die Schrittweise Anwendung von (<:). ghci> 3 <: empty [One (Leaf 3)] ghci> 2 <: it [Zero,One (Fork (Leaf 2) (Leaf 3))] ghci> 1 <: it [One (Leaf 1),One (Fork (Leaf 2) (Leaf 3))] Statt head und tail definieren wir, um Namenskonflikte zu vermeiden, Funktionen first und rest. Wir definieren diese Funktionen mit Hilfe einer einzigen Funktion, die beide Ergebnisse berechnet. first :: ArrayList a -> a first l = x where (Leaf x, _) = decons l rest :: ArrayList a -> ArrayList a rest l = xs where (_, xs) = decons l Die Funktion decons arbeitet wie cons auf Binärbäumen statt Bits. Sie ist dem Dekrementieren einer Binärzahl nachempfunden und liefert den Teilbaum zurück, der zum niedrigsten Bit gehört, das nicht Null ist. Bäume aus höherwertigen Bits werden dabei aufgeteilt. Der linke Teil wird als erste Komponente des Ergebnisses zurück geliefert, der andere Teil wird vor das Ergebnis der rekursiven Dekrementierung gehängt. decons :: ArrayList a -> (BinTree a, ArrayList a) decons [One u] = (u, []) decons (One u : ts) = (u, Zero : ts) decons (Zero : ts) = (u, One v : ws) where (Fork u v, ws) = decons ts Die erste Regel sorgt dafür, dass die erste Invariante, dass der letzte Eintrag der Liste von Bits nicht Null ist, aufrecht erhalten wird. Auch die anderen Invarianten bleiben 11 erhalten. Die Implementierung verlässt sich auf die Invarianten, da nur durch sie sicher gestellt ist, dass das Pattern-Matching auf Fork beim rekursiven Aufruf nicht fehlschlägt. Auch das Patten-Matching in first ist nur auf Grund der Invarianten sicher. Die Laufzeit von decons, also auch von first und rest ist durch die Anzahl der Bits beschränkt also logarithmisch in der Länge der Array-Liste. Hier ist ein Beispielaufruf auf eine vier-elementige Liste: decons .-----.-----o / \ /\ /\ 1 2 3 4 let (Fork u v, ws) = decons .-----o / \ /\ /\ 1 2 3 4 in (u, One v : ws) let (Fork u v, ws) = let (Fork u’ v’, ws’) = decons o / \ /\ /\ 1 2 3 4 in (u’, One v’ : ws’) in (u, One v : ws) let (Fork u v, ws) = let Fork u’ v’ = o / \ /\ /\ 1 2 3 4 ws’ = [] in (u’, One v’ : ws’) in (u, One v’ : ws’) let Fork u v = o / \ 1 2 ws = [One o ] / \ 3 4 in (u, One v : ws) 12 (1, o-----o ) | / \ 2 3 4 Wir definieren nun Funktionen zum Zugriff auf Elemente anhand ihres Index. Wie bei Arrays erlaubt (!) ein Element abzufragen. (!) :: ArrayList a -> Int -> a l ! n = select 1 l n Wir verwenden eine Hilfsfunktion select, die als zusätzlichen Parameter die Größe des nächsten Binärbaums mitführt. select :: Int -> ArrayList a -> Int -> a Diese Größe wird in jedem rekursiven Aufruf verdoppelt. Wenn das erste Bit Null ist, suchen wir in den restlichen Bits weiter. select size_t (Zero : ts) n = select (2*size_t) ts n Wenn das erste Bit Eins ist, entscheiden wir anhand der Größe des nächsten Binärbaums, ob wir das gesuchte Element in ihm finden oder rekursiv abteigen. Wenn der gesuchte Index kleiner als die Größe des nächsten Binärbaums ist, suchen wir in diesem, sonst rekursiv in den restlichen Bits, mit einem entsprechend angepassten Index. select size_t (One t : ts) n | n < size_t = selectBinTree (size_t‘div‘2) t n | otherwise = select (2*size_t) ts (n-size_t) Die Berechnung des Größenparameters ist dabei nur korrekt, wenn die Invarianten gelten. Wenn man zum Beispiel die Nullen bei der Darstellung wegließe, könnte man den Index nicht mehr auf diese Weise berechnen. Die Funktion selectBinTree verwenden wir, um ein Element in einem vollständigen Binärbaum zu suchen. Auch sie hat einen Größenparameter, der hier die Größe des linken Teilbaums des Arguments beschreibt, oder Null ist, wenn das Argument in Blatt ist. 13 selectBinTree :: Int -> BinTree a -> Int -> a selectBinTree 0 (Leaf x) 0 = x selectBinTree size_u (Fork u v) n | n < size_u = selectBinTree (size_u‘div‘2) u n | otherwise = selectBinTree (size_u‘div‘2) v (n-size_u) Wie bei select, verwenden wir auch hier den Größenparameter, um zu entscheiden, ob wir in den linken Teilbaum absteigen oder ihn überspringen. Die Laufzeit von select ist beschränkt durch die Anzahl der Bits plus die Größe des größten Binärbaums. Beides ist logarithmisch in der Länge der Array-Liste, also auch die Laufzeit von (!). Auch das Pattern-Matching in selectBinTree ist nur dann sicher, wenn die Invarianten gelten, also der Binärbaum vollständig ist. Schließlich definieren wir noch eine Funktion modify zur Manipulation eines Elements an einem Index. Zusätzlich zum Index bekommt diese Funktione einen Funktions-Parameter übergeben, der auf das zu ändernde Element angewendet wird. modify :: Int->(a->a)->ArrayList a->ArrayList a modify = update 1 Auch modify verwendet eine Hilfsfunktion mit zusätzlichem Größenparameter. Die Implementierung dieser Funktion ähnelt der von select, baut aber die komplette Liste wieder auf, während sie zum gesuchten Element absteigt. Wenn das erste Bit Null ist, verarbeiten wir rekursiv die restlichen Bits. update size_t n f (Zero : ts) = Zero : update (2*size_t) n f ts Wenn nicht, entscheiden wir uns wieder fürs Absteigen oder Überspringen und verwenden im ersten Fall die Funktion updateBinTree. update size_t n f (One t : ts) | n < size_t = One (updateBinTree (size_t‘div‘2) n f t):ts | otherwise = One t : update (2*size_t) (n-size_t) f ts updateBinTree steigt in den Binäybaum wie select, liefert aber den veränderten Baum zurück, statt nur das gesuchte Element. 14 updateBinTree 0 0 f (Leaf x) = Leaf (f x) updateBinTree size_u n f (Fork u v) | n < size_u = Fork (updateBinTree (size_u‘div‘2) n f u) v | otherwise = Fork u (updateBinTree (size_u‘div‘2) (n-size_u) f v) Trotzdem ist die Laufzeit von update wie die von select nur logarithmisch, da wesentliche Teile des Binärbaums und auch der Liste von Binärbäumen geteilt, also nicht kopiert, werden. Obwohl wir uns bemüht haben, die Invarianten bei der Definition der Operatoren aufrecht zu erhalten, ist die Implementierung komplex genug, dass Fehler nicht ausgeschlossen sind. Um uns zu vergewissern, dass die Invarianten tatsächlich erhalten bleiben, können wir die definierten Funktionen testen. Dazu verwenden wir QuickCheck, damit wir nur die Eigenschaften und nicht die Test-Eingaben selbst definieren müssen. Das Prädikat isValid prüft, ob eine gegebene Array-Liste die geforderten Invarianten erfüllt. isValid :: ArrayList a -> Bool isValid l = (isEmpty l || nonZero (last l)) && all zeroOrComplete l && and (zipWith zeroOrHeight [0..] l) Die Funktion nonZero testet, ob ein Bit Eins ist, zeroOrComplete testet ob ein Bit Null ist oder der enthaltene Baum vollständig und zeroOrHeight testet, ob ein Bit Null ist oder der enthaltene Baum die gegebene Höhe hat. Statt die Anzahl der Blätter zu zählen, genügt es bei einem vollständigen Baum, die Höhe zu berechnen. Wir verzichten hier auf die Angabe der Hilfsfunktionen. Deren Definitionen sowie geeignete Eigenschaften zum Testen der Operationen stehen im Modul PartialArrayList. Nach der Definition eines geeigneten QuickCheck-Generators für Array-Listen, können wir automatisch testen, ob unsere Implementierung korrekt ist. Alle gezeigten Funktionen sind korrekt implementiert, es wäre aber ein leichtes gewesen, Fehler einzubauen. Zum Beispiel sieht die folgende Regel für die cons-Funktion auf den ersten Blick korrekt aus, ist es aber nicht: cons u (One v : ts) = cons (Fork u v) ts Ebenso ist das folgende keine korrekte Regel für decons: decons (One u : ts) = (u, ts) 15 Obwohl QuickCheck gute Dienste leistet, solche Fehler zu finden, wäre es schön, wenn wir sie gar nicht erst machen könnten. Das Problem ist, dass unser Datentyp für ArrayListen Werte erlaubt, die keine gültigen Array Listen sind. Besser wäre, wenn wir den Typ so definieren könnten, dass gar keine ungültigen Array-Listen dargestellt werden können. Dann wären die obigen Fehler Typfehler und würden schon zur Kompilier-Zeit erkannt. Auf den ersten Blick ist unklar, we man eine so komplexe Invariante wie die für ArrayListen im Typsystem kodieren kann. Dies ist aber tatsächlich möglich. Wir beginnen mit einer einfachen Idee, die es uns später erlaubt, die erste Invariante sicher zu stellen, dass am Ende der Liste immer ein Baum steht. Dazu verwenden wir statt normaler Listen einen eigenen Listendatentyp, der sicher stellt, dass am Ende immer ein Element steht. So einen Datentyp für nicht-leere Listen könnte man wie folgt definieren: data NEList a = End a | Cons a (NEList a) Schwieriger ist es, sicherzustellen, dass alle Einträge einer Liste vollständige Binärbäume einer festen, in jedem Schritt um eins wachsenden Höhe sind. Der folgende Datentyp für Array-Listen stellt dies sicher. Da wir intern nicht-leere Listen von Bäumen verwenden, stellen wir die leere Array-Liste durch einen eigenen Konstruktor dar: data ArrayList a = Empty | NonEmpty (TreeList a) Eine Liste von Bäumen ist entweder einelementig oder beginnt mit einem Bit gefolgt von weiteren Bäumen. data TreeList a = Single a | Bit a :< TreeList (a,a) Bemerkenswert ist hierbei der sich ändernde Typparameter von TreeList. Datentypen, die in ihrer Definition mit veränderten Typparametern verwendet werden, nennt man nicht-regulär oder nested data types. Der Effekt dieser Definition ist, dass die Restliste einer TreeList Int nicht Ints sondern Paare von Ints enthält! Die Restliste der Restliste enthält Paare von Paaren von Ints und so weiter. Dadurch wird die Baumstruktur der enthaltenen Binärbäume durch die Paar-Konstruktoren erzeugt, wie die folgenden Beispiele zeigen: Single 1 Zero :< Single (2,3) One 1 :< Zero :< Single ((2,3),(4,5)) 16 Alle diese Werte sind vom Typ TreeList Int, der Bit-Datentyp ist also nun wie folgt definiert und enthält keine expliziten Binärbäume mehr: data Bit a = Zero | One a Der Versuch, eine ungültige Array-Liste zu bauen, wird jetzt vom Typchecker verhindert: ghci> Zero :< Single (42 :: Int) Couldn’t match expected type ‘(a, a)’ against inferred type ‘Int’ Die Funktionen auf Array-Listen lassen sich wie folgt auf den neuen Datentyp übertragen. Die leere Array-Liste wird durch Empty dargestellt: empty :: ArrayList a empty = Empty isEmpty :: ArrayList a -> Bool isEmpty Empty = True isEmpty _ = False Um ein Element vorne an eine Array-Liste anzuhängen, definieren wir wieder eine Funktion (<:). Wir behandeln zunächst leere Array-Listen gesondert: (<:) :: a -> ArrayList a -> ArrayList a x <: Empty = NonEmpty (Single x) x <: NonEmpty l = NonEmpty (cons x l) Die Funktion cons definieren wir wieder in Anlehnung an das Inkrementieren einer Binärzahl: cons cons cons cons :: a -> TreeList a -> TreeList a x (Single y) = Zero :< Single (x,y) x (Zero :< xs) = One x :< xs x (One y :< xs) = Zero :< cons (x,y) xs Wenn wir bei dieser Definition in der ersten oder letzten Regel die Null vergessen, führt das zu einem Typfehler: 17 Occurs check: cannot construct the infinite type: a = (a, a) Bemerkenswert ist der rekursive Aufruf von cons in der letzten Regel. Sein erstes Argument ist vom Typ (a,a) und die Liste xs ist vom Typ TreeList (a,a). Wenn der Typ einer Funktion im rekursiven Aufruf ein anderer ist, als der beim umgebenden Aufruf, nennt man das polymorphe Rekursion. Diese wird typischerweise bei nicht-regulären Datentypen verwendet, die ja eine rekursive Komponente mit veränderten Typparametern haben. Der Typ einer polymorph rekursiven Funktion1 kann nicht inferiert werden, wir dürfen die Typsignatur von cons also nicht weglassen. Tun wir es doch, bekommen wir den eben gezeigten Typfehler. Zur Definition von first und rest behandeln wir einelementige Array-Listen gesondert und verwenden dann wieder eine Hilfsfunktion decons, die die Ergebnisse von first und rest auf einmal berechnet. first :: ArrayList a -> a first (NonEmpty (Single x)) = x first (NonEmpty l) = fst $ decons l rest :: ArrayList a -> ArrayList a rest (NonEmpty (Single _)) = Empty rest (NonEmpty l) = NonEmpty . snd $ decons l decons wird nie mit einelementigen Listen aufgerufen, entspricht also dem Dekrementieren einer Binärzahl größer als zwei. decons decons decons decons where :: TreeList a -> (a, TreeList a) (One x :< xs) = (x, Zero :< xs) (Zero :< Single (x,y)) = (x, Single y) (Zero :< xs) = (x, One y :< ys) ((x,y),ys) = decons xs Da vor jeden Aufruf von decons die einelementige Liste gesondert behandelt wird, ist diese partielle Definition von decons sicher. Auch hier bekämen wir wieder Typfehler, wenn wir im Ergebnis Listen erzeugen würden, die die Invarianten verletzen oder die Typsignatur wegließen. Die Definition der Funktionen zum Zugriff auf einen beliebigen Index wird durch die neue Darstellung dadurch erschwert, dass wir die Funktionen zum Absteigen in die 1 im Gegensatz zum Typ einer (nur) polymorphen, rekursiven Funktion 18 vollständigen Binärbäume nicht mehr so leicht definieren können. Unterschiedlich große Binärbäume haben unterschiedliche Typen, wir können also keine einzige Funktion schreiben, die Bäume beliebiger Größe akzeptiert. Eine mögliche Lösung des Problems ist es, die Funktion zum Nachschlagen eines Blattes in einem Binärbaum als zusätzlichen Parameter mitzuführen. Der Typ dieser Funktion ändert sich nämlich genau wie der Typ der TreeList, die wir verarbeiten. Die Funktion (!) ist wie folgt definiert: (!) :: ArrayList a -> Int -> a Empty ! _ = error "ArrayList.!: empty list" NonEmpty l ! n = select 1 sel l n where sel x m | m == 0 = x | otherwise = error $ "ArrayList.!: invalid index " ++ show n Wir verwenden wieder eine Hilfsfunktion select, die die Größe des nächsten Binärbaums mitführt. Zusätzlich führt sie nun aber auch noch eine Funktion sel mit, die ein Blatt in diesem Binärbaum nachschlagen kann. Im ersten Aufruf hat die sel-Funktion den Typ a -> Int -> a, dieser ändert sich aber in rekursiven Aufrufen wie der Typ der TreeList. Dadurch, dass wir sel lokal definieren, können wir den ursprünglichen Index n im Fehlerfall ausgeben. Der Index m muss Null sein, da ein einelementiger Binärbaum nur am Index Null ein Element enthält. Der Typ der select-Funktion zeigt, dass die übergebene Funktion als Argument genau den Typ nimmt, den die TreeList (als erstes) enthält. select :: Int -> (b -> Int -> a) -> TreeList b -> Int -> a In der Definition von select behandeln wir zunächst den Fall einer einelementigen Liste: select _ sel (Single x) n = sel x n Hierbei ignorieren wir den Größenparameter, da die Funktion sel die Größe den Binärbaums kennt und den Index nachschlagen kann. Die zweite Regel verwendet wie vorher den Größenparameter, um zu entscheiden, ob der nächste Baum übersprungen werden soll. Zusätzlich übergeben wir im rekursiven Aufruf eine angepasste Funktion, die einen Wert in einem doppelt so großen Binärbaum nachschlägt. 19 select size_x sel (bit :< xs) n = case bit of Zero -> select (2*size_x) descend xs n One x -> if n < size_x then sel x n else select (2*size_x) descend xs (n-size_x) where descend (l,r) m | m < size_x = sel l m | otherwise = sel r (m-size_x) Da der Teilbaum, den descend als Argument erhält, doppelt so groß ist wie x, entspricht die Größe von x genau der Größe des linken Teilbaums dieses Arguments. Die descendFunktion entscheidet anhand dieser Größe, ob sie in den linken oder rechten Teilbaum des Binärbaums absteigt und verwendet statt eines rekursiven Aufrufs die vorher übergebene Funktion sel, die für halb so große Bäume definiert wurde. Die modify-Funktion definieren wir analog dazu auch durch eine Hilfsfunktion update mit zwei Zusatzparametern: einem für die Größe des nächsten Baums und einem zum Verändern eines solchen Baums. modify :: Int->(a->a)->ArrayList a->ArrayList a modify _ _ Empty = error "ArrayList.modify: empty list" modify n f (NonEmpty l) = NonEmpty $ update 1 upd n l where upd m x | m == 0 = f x | otherwise = error $ "ArrayList.modify: invalid index " ++ show n Die upd-Funktion für einen einelementigen Baum, wendet die gegebene Funktion auf diesen Baum, der ja nur durch seine Beschriftung selbst dargestellt wird, an. Bei ungültigen Indizes liefert sie eine Fehlermeldung mit dem ursprünglichen Index. Die update-Funktion nimmt als Argument eine solche upd-Funktion, die die Elemente der übergeben TreeList manipuliert. update :: Int -> (Int -> a -> a) -> Int -> TreeList a -> TreeList a Die Regel für einelementige Listen, wendet diese upd-Funktion auf das Element der Liste an: 20 update _ upd n (Single x) = Single $ upd n x Die zweite Regel definiert wie select eine abgewandelte Funktion descend für den rekursiven Aufruf, die die ursprüngliche upd Funktion verwendet. update size_x upd n (bit :< xs) = case bit of Zero -> Zero :< update (2*size_x) descend n xs One x -> if n < size_x then One (upd n x) :< xs else bit :< update (2*size_x) descend (n-size_x) xs where descend m (l,r) | m < size_x = (upd m l, r) | otherwise = (l, upd (m-size_x) r) Damit ist die Implementierung typsicherer Array-Listen komplett. Wir brauchen nun nicht mehr QuickCheck zu verwenden, um zu testen, ob die Invarianten eingehalten werden, da dies schon durch die Typprüfung sichergestellt ist. Wir sollten natürlich trotzdem Tests schreiben, die die Korrektheit der Operationen prüfen. Nur weil die Invariante aufrecht erhalten wird, heißt das noch nicht, dass die Funktionen die Reihenfolge der Elemente nicht aus Versehen verändern oder falsche Elemente manipuliert werden. Tests, die die Korrektheit der Implementierung überprüfen, stehen im Modul ArrayList, das auch die hier gezeigte Implementierung enthält. Tries Im Kapitel über Arrays haben wir gesehen, wie man Indizes effizient Werte zuordnen kann, ohne die Indizes explizit zu speichern. Ein Array haben wir dabei als Baum dargestellt, in dem jede Position implizit einem Index entsprach. Dabei war die Entfernung dieser Position von der Wurzel des Baumes genau die Länge der Binärdarstellung des Index. In diesem Kapitel werden wir Datenstrukturen, sogenannte Tries2 , kennen lernen, die diese Idee für andere Schlüssel als Zahlen verwenden. Die Idee hinter Tries steht im Kontrast zur expliziten Darstellung der Schlüssel in einem Suchbaum oder einer sortierten Liste. Eine Zuordnung von beliebigen vergleichbaren Schlüsseln zu beliebigen Werten kann man als Liste von Paaren darstellen, wie hier am Beispiel von Char-Schlüsseln: 2 Trie kommt von retrieve wird aber dennoch von einigen, zur Unterscheidung von tree, wie try ausgesprochen. 21 type CharMap a = [(Char,a)] Die leere Zurodnung ist die leere Liste. emptyCharMap :: CharMap a emptyCharMap = [] Wir schlagen einen Wert in einer CharMap nach, indem wir den zugehörigen Wert zum gegebenen Schlüssel suchen und liefern Nothing zurück, falls kein Wert zu diesem Schlüssel gespeichert ist: lookupChar :: Char -> CharMap a -> Maybe a lookupChar _ [] = Nothing lookupChar c ((c’,x):xs) | c == c’ = Just x | otherwise = lookupChar c xs Um einen neuen Eintrag zu speichern, fügen wir ihn vorne an die CharMap an und löschen den alten Eintrag aus ihr. insertChar :: Char -> a -> CharMap a -> CharMap a insertChar c x xs = (c,x) : deleteChar c xs Löschen können wir einen Eintrag, indem wir nur solche Einträge behalten, die ein anderes Zeichen als Schlüssel enthalten. deleteChar :: Char -> CharMap a -> CharMap a deleteChar c = filter ((c/=) . fst) Effizienter wäre eine Implementierung mittels eines Suchbaums, die man immer dann verwenden kann, wenn es eine Ordnung auf dem Typ der Schlüssel gibt. Wir lernen nun eine weitere Möglichkeit kennen, Werte Schlüsseln zuzuordnen, die sich an der Struktur der Schlüssel orientiert. Als erstes Beispiel verwenden wir Strings als Schlüssel. Statt die Ordnung auf Strings auszunutzen und einen Suchbaum zu verwenden, nutzen wir deren Struktur, um Werte an bestimmte Positionen in einem Baum zu schreiben. Zum Beispiel speichert der folgende Baum die Zuordnung "to" "tom" "tea" "ten" -> -> -> -> 17 42 11 10 22 t o e 17 m 42 a n 11 Abbildung 2: String-Trie 23 10 In disem Baum enthalten manche Knoten Werte und andere nicht. Der zu einem Wert gehörige Schlüssel kann an den Kanten, die von der Wurzel zu diesem Wert führen, abgelesen werden. Jede StringMap ist also ein Knoten und besteht aus einem optionalen Wert und einer Zuordnung von Zeichen zu kleineren StringMaps, die die Zuordnung vom Restwort zu einem Wert speichern: data StringMap a = StringMap (Maybe a) (CharMap (StringMap a)) Hierbei verwenden wir die oben definierte CharMap, um die Kanten in dem Baum zu speichern. Die obige Beispielzuordnung wird mit diesem Datentyp wie folgt dargestellt: StringMap Nothing [(’t’,StringMap Nothing [(’o’,StringMap (Just 17) [(’m’,StringMap (Just 42) [])]) ,(’e’,StringMap Nothing [(’a’,StringMap (Just 11) []) ,(’n’,StringMap (Just 10) [])])])] Die leere StringMap speichert keinen Wert (ein Wert an der Wurzel wäre der Eintrag, der dem leeren String zugeordnet ist) und eine leere Zuordnung von Zeichen zu StringMaps. emptyStringMap :: StringMap a emptyStringMap = StringMap Nothing emptyCharMap Zum Nachschlagen eines zu einem String gespeicherten Wertes untersuchen wir die Struktur des Schlüssels. lookupString :: String -> StringMap a -> Maybe a Wenn der Schlüssel der leere String ist, geben wir den an der Wurzel gespeicherten Eintrag zurück: lookupString [] (StringMap a _) = a Wenn der Schlüssel aus einem ersten Zeichen c und restlichen Zeichen cs besteht, suchen wir aus der CharMap die zu c gehörige StringMap heraus und suchen in dieser rekursiv den Schlüssel cs. Durch die Verwendung der Maybe-Monade ist das Gesamtergebnis Nothing, wenn die CharMap keinen Eintrag für c enthält. 24 lookupString (c:cs) (StringMap _ b) = lookupChar c b >>= lookupString cs Um einen Wert unter einem String einzufügen, speichern wir ihn an der Wurzel, wenn der String leer ist, insertString :: String -> a -> StringMap a -> StringMap a insertString [] x (StringMap _ b) = StringMap (Just x) b oder wir fügen der CharMap unter dem ersten Zeichen c einen Eintrag hinzu, der die alten Einträge enthält und zusätzlich den neuen unter den restlichen Zeichen cs. insertString (c:cs) x case lookupChar c b Nothing -> insertChar c (insertString Just m -> insertChar c (insertString (StringMap a b) = StringMap a $ of cs x emptyStringMap) b cs x m) b Diese Definition verwendet die Funktion lookupChar, und fügt je nach deren Ergebnis die restlichen Zeichen entweder in die leere StringMap oder oder in die nachgschlagene ein. Da die rechten Seiten des case-Ausdrucks sich nur im letzten Argument von insertString unterscheiden, können wir Code-Duplikation vermeiden, indem wir die Fallunterscheidung in dieses Argument hineinziehen: insertString (c:cs) x (StringMap a b) = StringMap a (insertChar c (insertString cs x (maybe emptyStringMap id (lookupChar c b))) b) Die Funktion maybe :: b -> (a -> b) -> Maybe a -> b ist in der Prelude vordefiniert. Die Laufzeit von insertString ist (wenn wir von der Laufzeit der ineffizient implementierten CharMap absehen) linear in der Länge des als Schlüssel übergebenen Strings. Anders als bei Suchbäumen, deren Laufzeit logarithmisch in der Anzahl der gespeicherten Werte ist, ist die Laufzeit von Trie-Funktionen unabhängig von der Größe des Tries. Da auch Suchbaum-Implementierungen den Schlüssel ansehen müssen, um ihn zu vergleichen, hängt auch deren Laufzeit von der Größe der Schlüssel ab, so dass die Laufzeit 25 von Trie-Operationen theoretisch besser ist. Oft ist aber der Vergleich eines Schlüssels nicht so teuer wie der Abstieg entsprechend seiner Struktur in einem Trie. Welche Datenstruktur in der Praxis besser ist, hängt vom Anwendungsbeispiel ab, insbesondere davon, wie dicht die Datenstruktur besetzt ist. Beim Löschen eines Eintrags gehen wir ähnlich vor wie zum Einfügen, um den gesuchten Schlüssel zu finden. deleteString :: String -> StringMap a -> StringMap a Wenn der Schlüssel der leere String ist, löschen wir den Eintrag an der Wurzel. deleteString [] (StringMap _ b) = StringMap Nothing b Ansonsten entfernen wir aus der unter dem ersten Zeichen gespeicherten StringMap den Reststring. deleteString (c:cs) (StringMap a b) = case lookupChar c b of Nothing -> StringMap a b Just m -> StringMap a (insertChar c (deleteString cs d) b) Auch hier können wir die Duplikation gemeinsamer Teile der rechten Seiten vermeiden, indem wir die maybe-Funktion verwenden. deleteString (c:cs) (StringMap a b) = StringMap a (maybe b (\d -> insertChar c (deleteString cs m) b) (lookupChar c b)) Sowohl die insertString als auch die deleteString Funktion verwenden abgesehen vom rekursiven Aufruf die lookupChar Funktion zusammen mit insertChar, um die StringMap mit dem Reststring zu verändern. Eleganter wäre, wenn man dazu nicht zwei Funktionen verwenden müsste, die die CharMap beide durchlaufen, sondern eine einzige Funktion updateChar zum Verändern einer CharMap verwenden könnte. Da wir mit updateChar sowohl Elemente einfügen als auch entfernen wollen, geben wir ihr den folgenden Typ. 26 updateChar :: Char -> (Maybe a -> Maybe a) -> CharMap a -> CharMap a Das erste Argument ist das Zeichen, dessen Eintrag geändert werden soll und das zweite eine Funktion, die die Änderung vornimmt. Sowohl der Argument- als auch der Ergebnistyp dieser Funktion ist Maybe a. Um einen Wert einzufügen, übergeben wir dieser Funktion Nothing, um eines zu löschen, liefert diese Funktion Nothing. Zum Ändern einer leeren CharMap rufen wir also die übergebene Funktion mit Nothing auf und tragen das Ergebnis dieses Aufrufs in die CharMap ein, wenn es nicht Nothing ist. updateChar c upd [] = maybe [] (\x -> [(c,x)]) (upd Nothing) Bei einer nicht-leeren CharMap übergeben wir Just x an upd, falls x unter dem Zeichen c gespeichert ist, und Ändern den Eintrag unter c gemäß des Ergebnisses dieses Aufrufs. Es ist also nicht nur möglich vorhandene Einträge zu löschen sondern auch, sie zu verändern. updateChar c upd ((c’,x):xs) | c == c’ = maybe xs (\y -> (c,y):xs) (upd (Just x)) | otherwise = (c’,x) : updateChar c upd xs Statt updateChar zu verwenden, um insertString und deleteString zu definieren, definieren wir eine Funktion updateString, mit deren Hilfe wir beide Funktion definieren können. Angenommen, updateString wäre schon definiert, dann könnten wir insertString und deleteString wie folgt definieren. insertString s x = updateString s (const (Just x)) deleteString s = updateString s (const Nothing) Der Typ der Funktion updateString entspricht dem von updateChar. updateString :: String -> (Maybe a -> Maybe a) -> StringMap a -> StringMap a Um den unter dem leeren String gespeicherten Wert zu ändern, wenden wir die übergebene upd-Funktion auf diesen an. 27 updateString [] upd (StringMap a b) = StringMap (upd a) b Bei einem nicht-leeren String wenden wir updateChar und geschachtelt updateString an. Dabei übergeben wir den updateString Aufruf als upd-Funktion an updateChar und kombinieren diesen dazu mit Funktionen, die dafür sorgen, dass er einen Maybe-Wert als Argument nimmt und als Ergebnis liefert. updateString (c:cs) upd (StringMap a b) = StringMap a (updateChar c (Just . updateString cs upd . maybe emptyStringMap id) b) Die neuen Implementierungen von insertString und deleteString durchlaufen die CharMaps seltener. Das allgemeinere update-Verfahren hat, so wie wir es implementiert haben, aber auch einen Nachteil. Beim Löschen eines nicht vorhandenen Werts, wird ein Eintrag für den gelöschten Schlüssel erzeugt (und mit Nothing belegt), auch wenn dieser vorher gar nicht vorhanden war: ghci> deleteString "a" emptyStringMap StringMap Nothing [(’a’,StringMap Nothing [])] Die alte Implementierung hat dieses Problem zwar nicht, entfernt allerdings auch keine vorhandenen Einträge, wenn sie leer sind. Mit der alten (wie mit der neuen) Implementierung von deleteString ergibt sich: ghci> let a=insertString "a" 42 emptyStringMap ghci> deleteString "a" a StringMap Nothing [(’a’,StringMap Nothing [])] Um leere Zweige im Baum zu vermeiden, kann man die Implementierung der updateFunktionen anpassen (siehe Übung). Verallgemeinerte Tries Die Idee, die Struktur der Schlüssel auszunutzen und ihnen feste Positionen in einer Datenstruktur zuzuordnen, lässt sich auf andere Datentypen verallgemeinern. Wir lernen nun zwei Beispiele kennen, die das verdeutlichen. Zunächst betrachten wir einen Datentyp für Binärzahlen, um den Zusammenhang zwischen Tries und den zuvor definierten 28 Arrays zu klären. Später betrachten wir als Beispiel eines komplizierteren rekursiven Datentyps Bäume als Schlüssel. Positive Binärzahlen können als Werte des folgenden Datentyps dargestellt werden. data Nat = One | O Nat | I Nat One ist die Darstellung der Zahl 1 oder allgemeiner des höchst-wertigen Bits einer beliebigen positiven Zahl. Führende Nullen (also auch die Zahl 0) können mit diesem Datentyp nicht dargestellt werden. Der äußerste Konstruktor ist immer das niedrigste Bit. Zum Beispiel wird die Zahl 6 als O (I One) dargestellt. Die Trie-Struktur für diesen Datentyp enthält Knoten mit drei Einträgen: • einem für den Eintrag des Schlüssels One, • eine NatMap für die restlichen Bits der Schlüssel, die mit O beginnen, und • eine NatMap für die restlichen Bits der Schlüssel, die mit I beginnen. data NatMap a = NatMap (Maybe a) (NatMap a) (NatMap a) Dieser Datentyp kann aus der Deklaration des Nat-Datentyps abgeleitet werden. Der NatMap-Konstruktor hat für jeden Konstruktor des Nat-Typs ein Argument. Die Typen der Argumente des NatMap-Konstruktors ergeben sich aus den Typen der Argumente der entsprechenden Nat-Konstrutoren. Hier hat der One-Konstruktor kein Argument, der NatMap-Konstruktor hat also an der entsprechenden Stelle einen Wert vom Typ Maybe a. Die beiden anderen Konstruktoren haben jeweils ein Argument vom Typ Nat, der NatMap-Konstruktor hat also an den entsprechenden Stellen Argumente vom Typ NatMap a. An der Wurzel einer NatMap steht der Eintrag, der zu One gehört, Darunter stehen die NatMaps, die zu allen geraden bzw. ungeraden Schlüsseln gehören. Das folgende Bild zeigt die Schlüssel der ersten vier Ebenen einer NatMap. Wenn wir die Einträge in ihre Dezimaldarstellung konvertieren, ergibt sich fast das Bild der Indizes in unserer Array-Implementierung, nur dass die Schlüssel alle um eins größer sind als die Array-Indizes, die bei Null anfangen, statt bei eins. Wie ein Array ist auch eine NatMap immer unendlich. Anders als ein Array enthält eine NatMap aber den Wert Nothing (statt eines Laufzeitfehlers) an Positionen, die keinem Wert zugeordnet sind. Die leere NatMap definieren wir also wie folgt. emptyNatMap :: NatMap a emptyNatMap = NatMap Nothing emptyNatMap emptyNatMap 29 1 O I 01 O 001 O 0001 I 0011 I O 011 101 O 0101 11 I O 0111 1001 I 111 I 1011 O 1101 I 1111 Abbildung 3: Nat-Trie Die Funktion zum Nachschlagen eines Schlüssels in einer NatMap folgt, wie die Definition des NatMap-Datentyps selbst, der Struktur der Werte vom Typ Nat. lookupNat lookupNat lookupNat lookupNat :: Nat -> NatMap a -> Maybe a One (NatMap a _ _) = a (O n) (NatMap _ b _) = lookupNat n b (I n) (NatMap _ _ c) = lookupNat n c Wenn der Schlüssel One ist, wird das erste Argument geliefert, wenn er mit O beginnt, wird lookupNat rekursiv auf das zweite Argument angewendet und, wenn er mit I beginnt, auf das dritte. Die insert- und delete-Funktionen definieren wir wieder mit Hilfe einer verallgemeinerten update-Funktion. insertNat :: Nat -> a -> NatMap a -> NatMap a insertNat n = updateNat n . const . Just deleteNat :: Nat -> NatMap a -> NatMap a deleteNat n = updateNat n (const Nothing) Auch updateNat folgt wie lookupNat der Struktur der Nat-Werte. updateNat :: Nat -> (Maybe a -> Maybe a) 30 -> NatMap a -> NatMap a updateNat One upd (NatMap a b c) = NatMap (upd a) b c updateNat (O n) upd (NatMap a b c) = NatMap a (updateNat n upd b) c updateNat (I n) upd (NatMap a b c) = NatMap a b (updateNat n upd c) Anders als bei StringMaps brauchen wir uns hier nicht um leere Zweige zu kümmern (können wir auch gar nicht!), da diese durch die unendliche Struktur der NatMap-Werte nicht zu vermeiden sind. Die Darstellung von NatMaps ist anders als die von StringMaps nicht redundant. Die NatMaps entsprechen also, abgesehen von der Index-Verschiebung und den exliziten Nothing-Einträgen, genau unseren Arrays. Auch die Laufzeiten der Funktionen sind identisch. Der Array-Zugriff hat logarithmische Laufzeit in der Größe des Index, der NatMap-Zugriff hat lineare Laufzeit in der Größe der gegebenen Binärzahl. Da die Größe einer Binärzahl logarithmisch in der Größe der dargestellten Zahl ist, entsprechen sich diese Laufzeiten. Neben den definierten Funktionen sind weitere denkbar. Zum Beispiel können wir eine map-Funktion für NatMaps angeben, die eine Funktion auf die Wert einer NatMap anwendet, indem wir eine Instanz der Klasse Functor definieren. Auch eine Funktion, die eine NatMap in eine Liste ihrer Schlüssel/Wert-Paare umwandelt, wäre nützlich. Leider können wir keine solche Funktion definieren, die terminiert, da NatMaps immer unendlich groß sind, selbst, wenn sie nur endlich viele Schlüssel/Wert-Paare enthalten. Wir können aber eine Monoid-Instanz definieren, bei der die Verknüpfung die Vereinigung zweier NatMaps berechnet. Dabei soll die Implementierung von mappend die Einträge der linken NatMap bevorzugen, wenn beide Argumente einen Eintrag zum selben Schlüssel enthalten. instance Monoid (NatMap a) where mempty = emptyNatMap NatMap a1 b1 NatMap (a1 (b1 (c1 c1 ‘mappend‘ NatMap a2 b2 c2 = ‘mplus‘ a2) ‘mappend‘ b2) ‘mappend‘ c2) Auch den Schnitt zweier NatMaps könnten wir auf diese Weise berechnen. 31 Nat-Werte als Schlüssel sind etwas einfacher als Strings, im Folgenden betrachten wir etwas kompliziertere Schlüssel, nämlich Bäume: data Tree = Leaf String | Fork Tree Tree Die Blätter solcher Bäume sind mit Strings beschriftet, innere Knoten haben genau zwei Nachfolger und sind unbeschriftet. Die zu diesem Typ gehörende Trie-Struktur ist eine Baum-Struktur, in der jede Position zu einem Baum vom Typ Tree gehört. Die Schlüssel für eine TreeMap sind Trees. data TreeMap a = TreeMap (StringMap a) (TreeMap (TreeMap a)) Wieder ergibt sich die Definition des TreeMap-Typs aus der des Tree-Typs. Der TreeMapKonstruktor hat zwei Argumente, da der Tree-Typ zwei Konstruktoren hat. Das erste Argument ist eine StringMap, da das (einzige) Argument des ersten Tree-Konstruktors Leaf vom Typ String ist. Der zweite Tree-Konstruktor Fork hat zwei Argumente, die beide vom Typ Tree sind. Das zweite Argument des TreeMap-Konstruktors hat daher den Typ TreeMap (TreeMap a). Mehrere Argumente eines Konstruktors werden also in der Trie-Struktur zu geschachtelten Tries entsprechender Typen. Dieses Muster haben wir auch bei der Definition der StringMap benutzt, wo das zu (:) gehörige Argument den Typ CharMap (StringMap a) hat. Anders als bei der StringMap ist durch Anwendung dieses Musters auf den TreeDatentyp der Typ TreeMap ein Nested Datatype. Statt auf die Typvariable a wird zumindest ein Vorkommen des TreeMap-Typkonstruktors auf einen anderen Typ, nämlich TreeMap a angewendet. Nested Datatypes sind uns schon bei der Definition von ArrayListen begegnet, wo wir sie ausgenutzt haben, um Invarianten der Darstellung im Typsystem zu kodieren. Wie dort brauchen wir auch hier polymorphe Rekursion, um rekursive Funktionen auf TreeMaps zu definieren. Zunächst definieren wir die leere TreeMap. emptyTreeMap :: TreeMap a emptyTreeMap = TreeMap emptyStringMap emptyTreeMap Schon hier hat der rekursive Aufruf von emptyTreeMap einen anderen Typ als der umgebende Aufruf. Der Typ von emptyTreeMap kann also nicht inferiert werden und wir dürfen die Typsignatur nicht weglassen. Die lookup-Funktion folgt wieder der Struktur des Schlüssels, der jetzt vom Typ Tree ist. 32 lookupTree :: Tree -> TreeMap a -> Maybe a lookupTree (Leaf s) (TreeMap a _) = lookupString s a lookupTree (Fork l r) (TreeMap _ b) = lookupTree l b >>= lookupTree r In der ersten Regel verwenden wir einfach lookupString um die Beschriftung des gegebenen Blattes in der zugehörigen StringMap nachzuschlagen. In der zweiten Regel schachteln wir zwei Aufrufe von lookupTree in der Maybe-Monade, wenn einer fehlschlägt, schlägt also der gesamte Aufruf fehl. Der erste rekursive Aufruf wendet lookupTree mit einem anderen Typ an als der umgebende Aufruf, der den gleichen Typ hat wie der zweite rekursive Aufruf. Das Egebnis des ersten rekursiven Aufrufs ist eine TreeMap auf die wir wieder lookupTree aufrufen. Auch lookupTree ist also polymorph rekursiv. Ebenso verhält es sich mit der updateTree-Funktion. updateTree :: Tree -> (Maybe a -> Maybe a) -> TreeMap a -> TreeMap a updateTree (Leaf s) upd (TreeMap a b) = TreeMap (updateString s upd a) b updateTree (Fork l r) upd (TreeMap a b) = TreeMap a (updateTree l (Just . updateTree r upd . maybe emptyTreeMap id) b) In der ersten Regel rufen wir die updateString-Funktion mit der Beschriftung des gegebenen Blattes auf, in der zweiten schachteln wir zwei rekursive Aufrufe von updateTree mit unterschiedlichen Typen und passen den inneren so an, dass er Maybe-Werte nimmt und liefert. Die insert und delete-Funktionen definieren wir wie üblich. insertTree::Tree -> a -> TreeMap a -> TreeMap a insertTree t = updateTree t . const . Just deleteTree :: Tree -> TreeMap a -> TreeMap a deleteTree t = updateTree t (const Nothing) Zum Beispiel liefert der Aufruf 33 insertTree (Fork (Leaf "a") (Leaf "bc")) 42 emptyTreeMap das Ergebnis TreeMap emptyStringMap (TreeMap (StringMap Nothing [(’a’, StringMap (Just (TreeMap (StringMap Nothing [(’b’, StringMap Nothing [(’c’, StringMap (Just 42) [])])]) emptyTreeMap)))]) emptyTreeMap) Verkürzt und etwas übersichtlicher lässt sich dieses Ergebnis wie folgt darstellen: Die Konstruktoren des als Schlüssel verwendeten Baums werden also von links nach rechts der Reihe nach verwendet, um die zugehörige Position im Trie zu finden. Der Abstand eines Eintrags von der Wurzel des Tries entspricht der Größe des als Schlüssel verwendeten Baums. Die Laufzeiten von lookupTree und updateTree sind entsprechend linear in der Größe des als Schlüssel verwendeten Baums. 34 Leaf Fork emptyStringMap Leaf Fork emptyTreeMap 'a' Leaf Fork emptyTreeMap 'b' 'c' 42 Abbildung 4: Beispiel einer ‘TreeMap‘ 35