Kapitel 3: Drehimpuls in der Quantenmechanik
Werbung

Kapitel 3:
Drehimpuls in der Quantenmechanik
Übersicht:
3.1 Definition und Eigenschaften der Drehimpulsoperatoren
3.2 Leiteroperatoren
3.3 Matrixdarstellung der Drehimpulsoperatoren
3.4 Kopplung von Drehimpulsen
Literatur:
P.W. Atkins, Molecular Quantum Mechanics, 5. ed.: Kapitel 4
H. Primas, U. Müller-Herold, Elementare Quantenchemie: Kapitel 3
R.N. Zare, Angular Momentum, Wiley 1988
3.1 Definition und Eigenschaften der Drehimpulsoperatoren
Drehimpulsoperatoren sind Bestandteil der Hamiltonoperatoren von vielen
quantenmechanischen Problemen (molekulare Drehbewegung, Stoss- und
Reaktionsprozesse, elektronische Bewegung, etc.). Wir beschäftigen uns zunächst
mit ihren Eigenschaften und ihrer Matrixdarstellung.
Gemäss dem Korrespondenzprinzip leitet sich der QM Drehimpulsoperator J~ˆ
wie folgt her (siehe auch PC II):
2 3 2 3 2 3
Jˆx
p̂x
x̂
J~ˆ = ~rˆ ⇥ p~ˆ , 4Jˆy 5 = 4ŷ 5 ⇥ 4p̂y 5
(3.1.1)
p̂z
ẑ
Jˆz
Ortsoperator
Impulsoperator
mit x̂ = x und p̂x = (~/i )@/@x , analog für die y- und z- Komponenten.
Auswerten des Vektorprodukts in Gl. (3.1.1) ergibt:
Jˆx = ŷ p̂z ẑ p̂y , Jˆy = ẑ p̂x x̂ p̂z , Jˆz = x̂ p̂y ŷ p̂x
(3.1.2)
Der Operator für das Betragsquadrat des Drehimpulses Ĵ2 (das Quadrat der Länge
des Drehimpulsvektors) ist definiert als:
2 def ~
ˆ
J = Jˆ · J~ˆ = Jˆx2 + Jˆy2 + Jˆz2
(3.1.3)
Die Drehimpulsoperatoren gehorchen den folgenden Vertauschungsrelationen:
def
[Jˆx , Jˆy ] = Jˆx Jˆy
Jˆy Jˆx = i ~Jˆz
bzw.
[Jˆy , Jˆz ] = i ~Jˆx , [Jˆz , Jˆx ] = i ~Jˆy
(3.1.4)
Kommutator
[Jˆ2 , Jˆi ] = 0,
(3.1.5)
i 2 {x, y , z }
wie man leicht aus den Vertauschungsrelationen für die Orts- und Impulsoperatoren
[x̂, p̂x ] = i ~,
[ŷ , p̂y ] = i ~,
[ẑ, p̂z ] = i ~
(3.1.6)
sowie Gl. (3.1.2) herleiten kann. Ausserdem gilt:
[Jˆ2 , Jˆi ] = 0,
(3.1.7)
i 2 {x, y , z }
d.h. Ĵ2 vertauscht mit den Drehimpulskomponenten Ĵx, Ĵy und Ĵz.
Eigenwerte:
Jˆ2 |J, Mi = ~2 J(J + 1)|J, Mi
J=0, 1, 2, ...
(3.1.8)
Jˆz |J, Mi = ~M|J, Mi
M=-J, -J+1, ... , +J
(3.1.9)
Da Ĵx, Ĵy und Ĵz gemäss Gl. (3.1.4) nicht untereinander vertauschen, kann immer nur
eine Komponente des Drehimpulsvektors exakt bestimmt werden. Man wählt
konventionsgemäss Ĵz. Da Ĵ2 und Ĵz gemäss Gl. (3.1.7) vertauschen, können sowohl
die Länge des Drehimpulsvektors als auch seine z-Komponente gleichzeitig exakt
bestimmt werden.
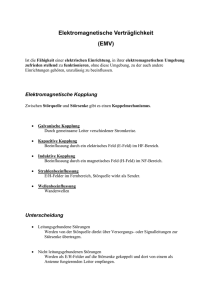
Eigenfunktionen |J, Mi ⌘ YJ,M (✓, ) :
Die Eigenfunktionen der Drehimpulsoperatoren Ĵ2 und Ĵz sind die aus der Lösung
des Wasserstoffatom-Problems bekannten Kugelflächenfunktionen YJ,M(θ,Φ):
J=0
1
2
3
|M|=0
Quelle: Wolfram Mathworld
1
2
3
Analytische Ausdrücke:
(3.1.10)
✓ ◆1/2
1
Y0,0 =
4⇡
✓ ◆1/2
3
Y1,0 =
cos(✓)
4⇡
✓ ◆1/2
3
Y1,±1 = ⌥
sin(✓) exp(±i )
8⇡
✓
◆1/2
5
Y2,0 =
3 cos2 (✓) 1
16⇡
✓ ◆1/2
15
Y2,±1 = ⌥
cos(✓) sin(✓) exp(±i ))
8⇡
✓
◆1/2
15
Y2,±2 =
sin2 (✓) exp(±2i ))
32⇡
usw.
3.2 Leiteroperatoren
Zum Aufstellen der Matrizen der Drehimpulsoperatoren definiert man nun die
folgenden Leiteroperatoren:
Jˆ+ = Jˆx + i Jˆy
Erzeugungs- (Aufsteige-) Operator
daraus folgt:
Jˆx = 12 (Jˆ+ + Jˆ )
Jˆ = Jˆx
i Jˆy
(3.2.1)
Vernichtungs- (Absteige-) Operator
Jˆy =
Eigenschaften der Leiteroperatoren: → Tafel
1 ˆ
2i (J+
Jˆ )
(3.2.2)
3.3 Matrixdarstellung der Drehimpulsoperatoren
Herleitung → Tafel
Zusammenfassung der Matrixelemente der Drehimpulsoperatoren:
hJ, M 0 |Jˆ2 |J, Mi = ~2 J(J + 1)
hJ, M 0 |Jˆz |J, Mi = ~M
p
1|Jˆ |J, Mi = ~ J(J + 1)
hJ, M 0 |Jˆx |J, Mi =
1
2
hJ, M 0 |Jˆy |J, Mi =
1
2i
(3.3.3)
M 0 ,M
p
hJ, M + 1|Jˆ+ |J, Mi = ~ J(J + 1)
hJ, M
(3.3.2)
M 0 ,M
M(M + 1)
(3.3.11)
1)
(3.3.12)
M(M
hJ, M 0 |Jˆ+ |J, Mi + hJ, M 0 |Jˆ |J, Mi
(3.3.13)
hJ, M 0 |Jˆ+ |J, Mi
(3.3.14)
hJ, M 0 |Jˆ |J, Mi
Alle anderen Matrixelemente sind gleich Null !
3.4 Kopplung von Drehimpulsen
Wir betrachten zwei Subsysteme mit Drehimpulsen J~1 und J~2 . Diese können zu
einem Gesamtdrehimpuls J~ koppeln.
Bsp.: ein ungepaartes Elektron in einem Atom: Spin-Bahn-Kopplung (s. PC III):
• J~1 : Bahndrehimpuls ~` .
• J~2 : Elektronenspin-Drehimpuls ~s .
• J~ : totaler Drehimpuls.
Basis: |J1 , M1 i ⌘ |`, m` i
Basis: |J2 , M2 i ⌘ |s, ms i
Basis: |J, Mi
Physikalisch entstehen Drehimpulskopplungen durch die Wechselwirkungen
von magnetischen Momenten, die mit der Drehbeweung von geladenen
Teilchen einhergehen.
Die Kopplung der Drehimpulse impliziert nichts anderes als eine Kopplung der
betreffenden (Dreh)Bewegungen. Drehimpulskopplungen treten immer auf,
sobald mehrere Drehimpulse in einem System vorhanden sind
(Bahndrehimpuls, Spindrehimpuls, Rotationsdrehimpuls, etc.).
Drehimpulskopplungen werden oft mit einem Vektormodell visualisiert. J~ ergibt
sich hierbei aus der Vektorsumme von J~1 und J~2. In Operatorschreibweise:
J~2
J~1
J~ˆ = J~ˆ1 + J~ˆ2
M2
Jˆx = Jˆ1,x + Jˆ2,x
Jˆy = Jˆ1,y + Jˆ2,y
J~
M1
d.h.:
z
(3.4.1)
Jˆz = Jˆ1,z + Jˆ2,z
M
Man betrachtet nun zwei Grenzfälle:
•
Schwache Kopplung zwischen J~1 und J~2 : J~1 , J~2 sind in guter Näherung
unabhängig voneinander (ungekoppelte Darstellung).
Gemeinsame Basis der Drehimpulse: |J1 , M1 , J2 , M2 i = |J1 , M1 i|J2 , M2 i (3.4.2)
•
Starke Kopplung zwischen J~1 und J~2 : J~1 , J~2 sind nicht mehr unabhängig
voneinander (gekoppelte Darstellung).
(3.4.3)
Gemeinsame Basis der Drehimpulse: |J1 , J2 , J, Mi
Die Basen |J1 , M1 , J2 , M2 i und |J1 , J2 , J, Mi sind durch eine Basistransformation
miteinander verbunden:
X
|J1 , J2 , J, Mi =
C(J1 , M1 , J2 , M2 ; J, M) |J1 , M1 , J2 , M2 i
(3.4.4)
M1 ,M2
wobei die Koeffizienten C(J1,M1, J2, M2 ; J, M) Vektorkopplungskoeffizienten
(Clebsch-Gordan (CG)-Koeffizienten) genannt werden. CG-Koeffizienten findet
man in Tabellenwerken oder können mit Mathematica berechnet werden.
Bem.: in der Literatur werden CG-Koeffizienten auch oft als sog. Wigner 3JSymbole ausgedrückt:
✓
◆
( 1)J1 J2 M
J1 J2 J
= p
C(J1 , M1 , J2 , M2 ; J, M)
(3.4.5)
M1 M2 M
2J + 1
Wigner 3J-Symbol
CG-Koeffizient
Die möglichen Werte für J ergeben sich aus der Drehimpulserhaltung:
J = J1 + J2 , J1 + J2
1, ..., |J1
J2 |
(Clebsch-Gordan-Reihe)
M = M1 + M2
Beispiele → Tafel, Übung 3 und später in der Vorlesung
(3.4.6)