Versuchsskript zum Massenträgheitsmoment
Werbung

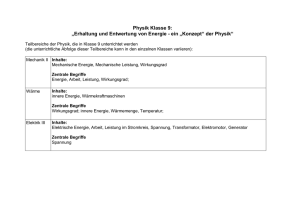
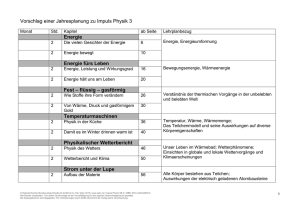
HAW Hamburg Fakultät Life Sciences - Physiklabor Physikalisches Praktikum Bestimmung von Massenträgheitsmomenten I. Allgemeines Zur Beschreibung der Drehbewegung starrer Körper um eine feste Achse führt man anstelle der translatorischen Größen Weg s , Geschwindigkeitv und Beschleunigung a die analogen Größen Winkel , Winkelgeschwindigkeit und Winkelbeschleunigung ein. In der Dynamik wird das Grundgesetz der Mechanik (2. Newtonsches Axiom). F m a (1) durch ein entsprechendes Gesetz in der Form M J (2) ersetzt , wobei M r F (3) das Drehmoment und J r 2 dm (4) das sogenannte Massenträgheitsmoment sind. Für einfach geformte (regelmäßige) Körper lässt sich das Integral J r 2 dm direkt lösen. Die auf Seite 2 folgende Tabelle enthält Beispiele für verschiedene Massenträgheitsmomentberechnungen unter der Voraussetzung, dass die Drehachse jeweils durch den Massenmittelpunkt (Schwerpunkt) geht. Mit Hilfe der Tabelle kann man aus der Form, den Abmessungen und der (homogen verteilten) Masse des betreffenden Körpers das Massenträgheitsmoment JS ermitteln. II. Der Satz von Steiner Geht die Drehachse nicht durch den Massenmittelpunkt des Drehkörpers, errechnet sich das Massenträgheitsmoment J Js m s 2 nach dem Satz von Steiner wie folgt: (5) Hierin bedeuten: JS : Massenträgheitsmoment des Körpers bezogen auf eine Drehachse, die durch den Massenmittelpunkt geht. m : (homogen verteilte) Masse des Körpers s : senkrechter Abstand der Drehachse vom Massenmittelpunkt des Körpers J : resultierendes Massenträgheitsmoment Ist der Abstand s sehr viel größer als die geometrischen Abmessungen des Körpers, gilt nach dem Satz von Steiner näherungsweise J m s2 (6) m ist die homogen verteilte Masse des Körpers. Der Index "s" beim Massenträgheitsmoment bezieht sich auf eine Drehachse durch den Massenmittelpunkt des Körpers. 1 Tabelle 1: Massentägheitsmomente einfacher Körper1 1 Paus: Physik in Experimenten und Beispielen. 1. Auflage. Leipzig: Hanser Verlag, 2002 2 III. Harmonische Drehschwingungen Verbindet man eine Spiralfeder, für die das lineare Drehmomentengesetz M D ( D* steht für die Winkelricht- größe der Feder) gilt, mit einem drehbar gelagerten, starren Körper mit dem Massenträgheitsmoment J in geeigneter Weise, erhält man ein System, das nach Anregung (Energiezufuhr) harmonische Drehschwingungen der Form t 0 cos 0 t ausführt. Man nennt 0 die Amplitude zum Zeitpunkt t = 0 und 0 2 f 2 / T0 die Eigenkreisfrequenz des Schwingsystems. Wird das Pendel nach einer Auslenkung losgelassen, so vollführt es Drehschwingungen, welche bei Vernachlässigung der Reibung durch die Differentialgleichung2 D J beschrieben wird. Die Lösung der Differentialgleichung beschreibt harmonische Schwingungen mit der Schwingungsdauer oder Periodendauer T0. T0 2 J (7) D Diese Beziehung zeigt, dass man bei bekannter Winkelrichtgröße D* und ermittelter Periodendauer T0 mit einem solchen System Massenträgheitsmomente bestimmen kann. IV. Bestimmung der Winkelrichtgröße über die Schwingungsdauer Dazu werden zwei Schiebereiter symmetrisch auf den gekerbten Stab geschoben. Für zwei verschiedene Schwerpunktabstände s1 und s2 (s1>s2 ) bestimmt man die Schwingungszeiten T1 und T2 (T1>T2 ). Das gesamte Trägheitsmoment Jges setzt sich aus den Systemkomponenten zusammen: J ges JStab JDrillachse 2JRe iter 2msi ² J1 JStab JDrillachse 2Js ,Re iter 2ms12 ; T1 2 J1 D J2 JStab JDrillachse 2Js ,Re iter 2ms22 ; T2 2 J2 D (8.1) (8.2) (8.3) JStab JDrillachse 2Js ,Re iter J1 2ms12 Umstellen der Gleichung (8.1) nach J2 J1 2ms 2ms 2 1 und Einsetzen in Gleichung (8.2) mit ergibt sich (8.4) (8.5) (8.6) 2 2 T12 T2 und J2 D 2 2 2 4 4 2 2 T T D 2 2 D 1 2 2m(s12 s22 ) 4 4 T2 T2 T2 T2 D 2 2 D 1 2 D 2 2 1 2 2m(s12 s22 ) 4 4 4 4 J1 D D 8 2 m s T 2 1 2 1 s22 T22 Achtung: m ist die Masse eines Reiters Gekerbte Stange Lichtschranke Schiebereiter Winkelscheibe Drillachse Zähler / PC Abb.: 1 Drillachse auf einem Stativfuß zur Ausmessung von Trägheitsmomenten 2 Das Aufstellen der Funktionsgleichung in 4 Schritten und das Lösen der Gleichung finden Sie im E‐Learning‐Modul ‘Physik Praktikum XX (JM) ….‘ . 3 (8.7) (8.8) V. Messabweichung und Messunsicherheit1 (DIN 1319) Jedes Messergebnis wird verfälscht durch Unvollkommenheiten der Messgeräte, der Messverfahren und des Messgegenstandes, in zweiter Linie auch durch Einflüsse der Umwelt und des Beobachters sowie durch während der Messung nicht erfassbare und nicht beeinflussbare Änderungen der Messgeräte, des Messgegenstandes, der Umwelt und des Beobachters. Das Ergebnis y einer Messreihe setzt sich aus dem Mittelwert y , der zunächst von erfassbaren systematischen Messabweichungen befreit worden ist, und einer Messunsicherheit u zusammen: y = c ± u Die Messunsicherheit u ist die Summe eines abgeschätzten Betrages f für nicht erfasste oder nicht erfassbare systematische Unsicherheiten (hier: Δys) und der Standardabweichung des Mittelwertes (hier m oder Δyz ). Man erhält u durch die Addition der Absolutbeträge beider Anteile. Setzt sich ein Mittelwert y aus mehreren Einzelmessgrößen x1,........,xn zusammen, errechnet sich die systematische Unsicherheit Δys einer Funktion y = F ( x1, x2,............,xn ) bei ausreichend kleinen systematischen Unsicherheiten Δxi der Einzelgrößen x1, x2,.........,xn folgendermaßen: Fortpflanzung für systematische Unsicherheiten: n F i 1 xi ys xi (9) Unter Mittelwert wird hier das arithmetische Mittel verstanden : 1 y n n yi (10) i 1 Ein Fortpflanzungsgesetz für zufällige kleine Unsicherheiten lautet : F yz xi i 1 x i n 2 (11) Die Standardabweichung der Messwerte n sy y i y 2 i 1 (12) n 1 beschreibt die Streuung der Messwerte um den Mittelwert y. 68,3% aller Messwerte liegen bei einer zufälligen Verteilung (Gaußsche Normalverteilung) im Intervall y - sy und y + sy. Aus der Standardabweichung der Messwerte erhält man die Standardabweichung des Mittelwertes zu sy (13) my n Mit einer Wahrscheinlichkeit von 68,3% liegt der wahre Wert im Intervall y - my und y + my, vorausgesetzt, dass der Mittelwert von systematischen Messabweichungen befreit ist. Mit zunehmender Probenanzahl n wird dieses Intervall immer kleiner, d. h., dass mit zunehmender Wahrscheinlichkeit der Mittelwert zunehmend besser mit dem wahren Wert übereinstimmt. Von den behandelten Messabweichungen und der Messunsicherheit sind begrifflich streng die Geräteunsicherheiten zu unterscheiden. Die Messgeräteunsicherheiten in der praktischen Messtechnik sind die vereinbarten oder garantierten äußersten Abweichungen , die nach oben und nach unten von der Sollanzeige bzw. Nennmaß zugelassenen sind. Messgeräteunsicherheiten können einseitig positiv oder negativ oder ± sein und dürfen nicht überschritten werden, unabhängig von der Messunsicherheit, mit der der Messwert bestimmt werden kann (Garantie-, Eichfehlergrenzen). 1 Eine ausführliche Darstellung finden Sie im Skript: Fehler‐ und Ausgleichsrechnung im Physikpraktikum Hilfen zum Experiment finden Sie im E‐Learning‐Modul ‘Physik Praktikum XX (JM) ….‘. 4 VI. Messdatenauswertung Beispiel Bestimmung der konstanten Geschwindigkeit v durch Ermittlung der Messstrecke s und der Zeit t, v = s/t. Die Strecke s wird mit einem Klappmaßstab bestimmt, die Zeit t wird mit der Stoppuhr gemessen. Die Messunsicherheiten der Messgeräte betragen: Δs = ± 5,0 mm, Δt = ± 0,010 s. Tabelle 2: Strecken und Zeiten zur Ermittlung der konstanten Geschwindigkeit v. Auswertung Arithmetisches Mittel: v = 0,4908 m/s n si in m ti in s vi in m/s 1 0,7650 1,540 0,4968 2 0,7640 1,540 0,4961 Standardabweichung der Messwerte: sv = 0,0094 m/s 3 0,7650 1,540 0,4968 Standardabweichung des Mittelwertes: mv = 0,0030 m/s 4 0,7630 1,560 0,4891 Fortpflanzung für systematische Unsicherheiten: 5 0,7640 1,540 0,4961 v 6 0,7660 1,570 0,4879 v s = (0,0032 + 0,0032) m/s = 0,0064 m/s 7 0,7670 1,560 0,4917 8 0,7650 1,540 0,4968 9 0,7660 1,560 0,4910 10 0,7640 1,640 0,4659 s = 0,7649 m t = 1,559 s v s s v t t 1 s s t t 2 t Gesamtunsicherheit: u vs mv = (0,0064 +0,0031) m/s = 0,0095 m/s Das Endergebnis lautet gemäß DIN 1319: v = (0,4908 ± 0,0095) m/s oder v = 0,4908 (1 ± 2,0 %) m/s Hinweis Gerundete numerische Ziffern sind mit 2 signifikanten Ziffern anzugeben. Sie sind aufzurunden. Das Messergebnis ist an derselben Stelle wie die zugehörige Unsicherheit zu runden. Beispiel: R = 245,5716 Ω mit uR = 0,4526 Ω R = (245,57 ± 0,46) Ω VII. Aufgaben für die Vorbereitung2 (Bitte zu Hause schriftlich vorbereiten) 1. Beschreiben Sie möglichst kurz, was Sie unter einem Massenträgheitsmoment und einer Winkelrichtgröße verstehen. 2. Eine Spiralfeder wird um 90° verdreht, während eine Kraft von 2,0 N im rechten Winkel im Abstand von 10,0 cm vom Drehpunkt wirkt. Wie groß ist D*? 3. Die Periodendauer des Drehsystems Stab/Spiralfeder hängt vom Massenträgheitsmoment JS des Stabes und von der Winkelrichtgröße D* der Spiralfeder ab. Welchen Einfluss hat die Anfangsauslenkung auf die Periodendauer To? 4. Wie können Sie mit Hilfe des Satzes von Steiner die Masse eines Körpers bestimmen? 5. Arbeiten Sie das Skript zur Fehlerrechnung durch. Rechnen Sie die Beispiele im Skript durch. Hinweis : Die Vorbereitung ist nicht dem Protokoll als Anhang beizufügen. 2 Nutzen Sie die Hilfen und Kontrollfragen mit Lösungen im E‐Learning‐Modul ‘Physik Praktikum XX (JM) ….‘. 5 VIII. Aufgaben für den Labortermin 1. Statische Bestimmung der Winkelrichtgröße D* Ihrer Spiralfeder (Bitte Drehpendel und gekerbte Stange verwenden). 2. Berechnen Sie das Massenträgheitsmoment des Stabes JS (Zylinder) aus der Form, den Abmessungen und der Masse. 3. Bestimmen Sie das Massenträgheitsmoment JS des verwendeten Stabes mit Hilfe des Drehpendels. Vergleichen Sie das Massenträgheitsmoment mit dem Ergebnis der Aufgabe 2. 4. Bestimmen Sie die Massenträgheitsmomente für Stab plus Reiter bei unterschiedlichen Abständen der Reiter zur Drehachse. Zeichnen Sie die Funktion JReiter= f(s²) in einem Diagramm und tragen Sie eine mittlere Gerade durch die Messpunkte ein. Bestimmen Sie die Gleichung dieser Funktion mithilfe der RGP-Funktion3 von Excel. 4.a Darf man das Massenträgheitsmoment der Reiter für s >100 mm mit der Näherung (JReiter auf Stab m s 2 ) beschreiben? Bestimmen Sie dazu aus dem Diagramm die Masse der Reiter [mReiter = ΔJ/Δ(s2)] und das Massenträgheitsmoment der Reiter um den Schwerpunkt (JS,Reiter ). Darf man JS,Reiter vernachlässigen? Hierbei sind die vernachlässigten Größen mit den Unsicherheiten zu vergleichen. 4.b Vergleichen Sie mReiter = ΔJ/Δ(s2) mit dem Ergebnis der Wägung. 5. Dynamische Bestimmung der Winkelrichtgröße D*. Beachten Sie Messdaten der Aufgabe 4. 6. Der Stab ändert seine Winkelgeschwindigkeit während des Schwingungsvorganges ständig. 6.a Wann hat der Stab seine maximale Winkelgeschwindigkeit Unsicherheit der Winkelgeschwindigkeit. max ? Berechnen Sie max und bestimmen Sie die 6.b Wie groß ist ωmax , wenn Sie den gekerbten Stab ohne Reiter mit einer Anfangsauslenkung von 90° verwenden? Bestimmen Sie ωmax einerseits aus To und andererseits aus einem Experiment / t . Bestimmen Sie deren Unsicherheiten und vergleichen Sie beide Werte. IX. Anwendungen (Bitte eine der folgenden Aufgaben wählen.) 1. Bei allen Schwingungsversuchen haben Sie das Massenträgheitsmoment von Achse und Feder des Drehpendels nicht berücksichtigt. Wie groß ist es etwa? Wie können Sie es messen? Welchen Einfluss hat es auf Ihr Ergebnis in Aufgabe VIII,4? 2. Welchen Einfluss hat die Reibung auf Ihre Messergebnisse? Welche Art von Reibung kommt bei den Schwingungsversuchen vor? Für eine geschwindigkeitsproportional gedämpfte Schwingung4 gilt: 0 e t cos(d t ) Untersuchen Sie, ob der Schwingungsvorgang des Stabes auf der Drillachse (Aufgabe VIII,4) eine geschwindigkeitsproportional gedämpfte Schwingung ist. Bestimmen Sie dazu die Abklingkonstante . 3 Das E‐Learning‐Modul ‘Physik Praktikum XX (JM) WiSe2011‘ zeigt in einfachen Beispielen die Möglichkeiten von Excel. Neben der Steigung und dem Achsenversatz können Sie ohne Mehraufwand auch deren Unsicherheiten ermitteln. Selbstverständlich kann man diese Daten auch mithilfe des Fehlerskriptes berechnen. 4 Das Aufstellen der Funktionsgleichung in 4 Schritten und das Lösen der Gleichung finden Sie im E‐Learning‐Modul ‘Physik Praktikum XX (JM) ….‘. 6 3. Es gibt alte Pendeluhren mit folgendem Pendel: 5o B m A Abb.2: Stark vereinfachtes Uhrenpendel. Es wird nur um kleine Winkel ausgelenkt. Berechnen Sie T0 aus der Funktionsgleichung als Funktion der Längen A und B. Welche Länge B müsste ein Pendel haben, dessen Masse im Schwerpunkt vereinigt ist ( A = 0), um mit gleicher Schwingungsdauer zu schwingen? * * * Stichwörter Drehung eines starren Körpers, Massenträgheitsmoment, Winkelrichtgröße, harmonische Schwingung, Eigenfrequenz, Newtonsche Reibung, Gleitreibung, Fehlerrechnung Literatur5 Dobrinski; Krakau; Vogel: Physik für Ingenieure. 12. Auflage. Stuttgart: B.G.Teubner Hering; Martin; Stohrer: Physik für Ingenieure. 8. Auflage. Heidelberg: Springer, 2002 Stuart; Klages: Kurzes Lehrbuch der Physik, Springer, 17. Auflage, 2002 Lindner: Physik für Ingenieure. 17. Auflage. Leibzig: Hauser, 2006 Paus: Physik in Experimenten und Beispielen. 2. Auflage. München: Hauser, 2002 Tipler; Mosca: Physik für Wissenschaftler und Ingenieure. 2. Auflage. München: Spektrum, 2006 Walcher: Praktikum der Physik. 9. Auflage. Stuttgart: B.G.Teubner, 2006 Geräte6 Spiralfeder, Probekörper, Zähler, Lichtschranke, Messschieber, Federwaage, PC incl. Messdatenerfassung Stichwörter Drehung eines starren Körpers, Massenträgheitsmoment, Winkelrichtgröße, harmonische Schwingung, Kreisfrequenz, Newtonsche Reibung, innere Reibung, Gleitreibung, Fehlerrechnung Eine Protokollvorlage können Sie aus dem E-Learning-Modul ‘Physikpraktikum‘ herunterladen. 15.05.2012, J. Martens 5 6 Die aufgeführten Literaturquellen und E‐Books zur Physik finden Sie im E‐Learning‐Modul ‘Physik Praktikum XX (JM) ….‘. Geräteanleitungen und Fotoaufnahmen finden Sie im E‐Learning‐Modul ‘Physik Physik Praktikum XX (JM) ….‘. 7 8