Herbst 2014 - Institut für Mechanik
Werbung

TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2014
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 1 von 3)
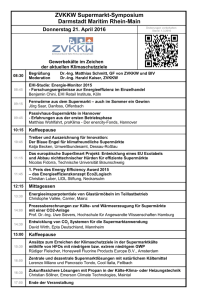
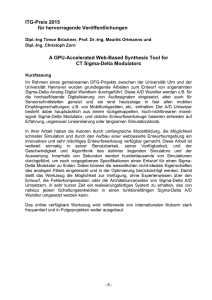
Das dargestellte System besteht aus homogenen, starren Körpern, welche durch dehnstarre Seile miteinander verbunden sind. Die jeweiligen Massen und Abmessungen sind der
Zeichnung zu entnehmen, wobei das Massenträgheitsmoment der gesamten abgesetzten
Rolle 4 bezüglich des zugehörigen Schwerpunktes D durch θ4 gegeben ist und die Rolle
2 als masselos angesehen werden soll. Der Kreisring 1 rollt dabei zu jedem Zeitpunkt
schlupffrei ab und die Seile sind stets gespannt.
ϕ3
m3
C r3
3
m4 , θ4
ϕ4
4
β
g
D
2
B
M0
r4
R4
ϕ2
2 r2
1
m1
y
α
x1
ϕ1
A
r1
x
µ0
Erweitern Sie die folgenden Skizzen der Teilkörper 1, 3 und 4 zu vollständigen Freikörperbildern (inklusive etwaiger Auflagerreaktionen). (2,0 Punkte)
Massenträgheitskräfte und -momente wurden hier nicht bewertet!
S1
m4 g
m3 g
θ1
θ3
Cx
m1 g
Dx
H1
N1
θ4
S3
S3
S2 C y
Dy
M0
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 3)
a)
Geben Sie die Impulsbilanz (Kräftesatz) des Kreisrings 1 bezüglich der x1 -Koordinate an.
(1,0 Punkte)
m1 ẍ1 = S1 + H1 − m1 g sin(α)
b)
Geben Sie die Drehimpulsbilanz (Drallsatz) des Kreisrings 1 bezüglich des Schwerpunkts
und der ϕ1 -Koordinate an. Spezifizieren Sie das zu verwendende Massenträgheitsmoment
mittels der gegebenen Größen. (1,0 Punkte)
Θ1 ϕ̈1 = −S1 r1 + H1 r1
mit Θ1 = m1 r12
c)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 3 bezüglich der y-Koordinate an. (1,0
Punkte)
m4 ÿ4 = Cy − m3 g − S2 − S3 cos(β)
| {z }
=0
d)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 4 bezüglich des Schwerpunkts und
der ϕ4 -Koordinate an. (1,0 Punkte)
Θ4 ϕ̈4 = S3 r4 − M0
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 3 von 3)
e)
Geben Sie die folgenden kinematischen Bindungen zwischen den Geschwindigkeiten der
einzelnen Koordinaten und der Geschwindigkeit des Freiheitsgrades x1 an. (2,0 Punkte)
ϕ̇1 (ẋ1 ) = −
x˙1
r1
ϕ̇2 (ẋ1 ) = −2
ẋ1
r2
ϕ̇3 (ẋ1 ) = −2
ẋ1
r3
ϕ̇4 (ẋ1 ) = −2
ẋ1
r4
Berechnen Sie die von dem Moment M0 vom Zeitpunkt t = 0 bis zum Zeitpunkt t =
t1 verrichtete Arbeit WM0 . Das System befindet sich anfänglich in Ruhe (x1 (t = 0) =
0, ẋ1 (t = 0) = 0) und es gilt x1 (t1 ) = a. (2,0 Punkte)
WM0 =
ˆ
M0 dϕ = 2 M0
a
r4
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 3)
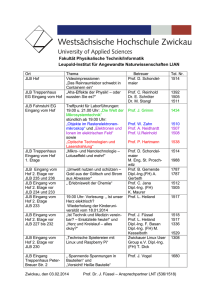
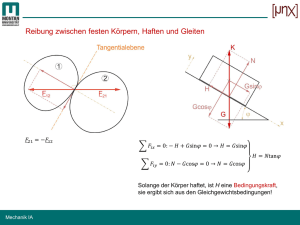
Die unten gezeigte Bahn besteht aus zwei reibungsbehafteten Ebenen (Gleitreibungskoeffizient µ, Länge l) sowie zwei als reibungsfrei anzunehmenden Kreisbögen (Öffnungswinkel
α). Im Punkt D befindet sich das Ende einer elastischen Feder (Federsteifigkeit c), welche in der dargestellten Lage entspannt ist. Bis zu einem Zeitpunkt t ≤ t0 wird ein als
Punktmasse anzusehender Körper (Masse m) im Punkt O in Ruhe gehalten. Dann wird
dieser los gelassen, wobei vorausgesetzt werden soll, dass sich der Körper anschließend
tatsächlich in Bewegung setzt (Hangabtriebskraft größer als Haftreibungskraft).
m
O
µ
l
α
g
r
A
µ
NN
B
y
C
l
ϕ
r
x
D
c
α
a)
O
Geben Sie die potenzielle Energie (Lageenergie) Epot
des Körpers im Punkt O bezüglich
des angegebenen Nullniveaus NN an. (1,0 Punkte)
O
Epot
= m g (r (1 − cos(α)) + l sin(α))
Geben Sie die verrichtete Reibarbeit WROA auf der Strecke zwischen den Punkten O und
A an. (1,0 Punkte)
WROA = −µ m g l cos(α)
TU Dortmund
Herbst 2014
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 3)
Berechnen Sie die Geschwindigkeit vB der Masse im Punkt B. (1,5 Punkte)
vB =
p
2 g (r (1 − cos(α)) + l sin(α) − µ l cos(α))
b)
Die Geschwindigkeit des Körpers im Punkt B ist nun durch v̄B > 0 vorgegeben. Berechnen
Sie die Geschwindigkeit im Punkt C. Verwenden Sie nicht den oben berechneten Wert
für vB . (1,0 Punkte)
vC =
p
v̄B2 − 2 µ g l
c)
Die Geschwindigkeit des Körpers im Punkt C ist nun durch v̄C > 0 vorgegeben. Geben Sie
zunächst die Funktion der Geschwindigkeit v(ϕ) des Körpers in Abhängigkeit des Winkels
ϕ an. Verwenden Sie nicht den oben berechneten Wert für vC . (1,5 Punkte)
v(ϕ) =
p
v̄C2 + 2 g r (1 − cos(ϕ))
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 3 von 3)
Geben Sie des Weiteren die Funktion der Normalkraft N(ϕ) zwischen Körper und Bahn
in Abhängigkeit des Winkels ϕ an. (1,5 Punkte)
v̄C2
N(ϕ) = m g (3 cos(ϕ) − 2) −
r
Geben Sie die Bedingung für den Öffnungswinkel α an, so dass der Körper an keiner Stelle
der kreisförmigen Bahn zwischen den Punkten C und D den Kontakt zu dieser verliert.
(1,0 Punkte)
α ≤ arccos
2
v̄C2
+
3gr 3
d)
Die Geschwindigkeit des Körpers im Punkt D ist nun durch vD > 0 vorgegeben. Geben
Sie die Gleichung zur Bestimmung der Stauchung ∆l der Feder an. Ein Auflösen dieser
Gleichung nach ∆l ist nicht erforderlich. (1,5 Punkte)
1
1
2
c ∆l2 − m g ∆l sin(α) = m v̄D
2
2
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 1 von 2)
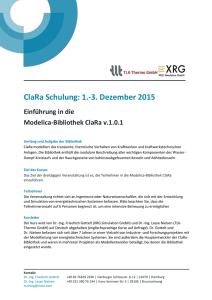
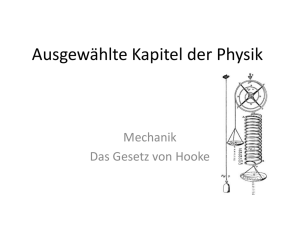
Das dargestellte System besteht aus zwei
starren Kreisscheiben (Masse M1 bzw. M2 ,
Radius jeweils R), welche über eine starre
Stange (Masse m, Länge l) verbunden
sind und schlupffrei auf dem Untergrund
abrollen. Die Bewegung findet auf einer
schiefen Ebene (Neigungswinkel α) und
unter Einfluss der Erdbeschleunigung g
statt. Die wie dargestellt angeknüpfte Feder
ist für den nicht näher spezifizierten Wert
ξ = ξ0 entspannt. Beachten Sie, dass ξ = 0
nicht die statische Ruhelage beschreibt.
g
ξ
M2 , R
c
M1 , R
m, l
α
NN
x
a)
Geben Sie den Zusammenhang zwischen den Geschwindigkeiten ξ˙ und ẋ an. (1,0 Punkte)
˙ ẋ) =
ξ(
ẋ
cos α
b)
Bestimmen Sie die potentielle Energie Epot in Abhängigkeit der Koordinate ξ und den
gegebenen Größen bezogen auf das dargestellte Nullniveau NN. (3,0 Punkte)
Epot (ξ) = M1 g [ ξ sin α + R1 cos α ] + m g
+ M2 g [ ( ξ + l ) sin α + R cos α ] +
l
ξ+
2
sin α + R cos α
1
c [ ξ0 − ξ ]2
2
Herbst 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 2 von 2)
c)
Bestimmen Sie die kinetische Energie Ekin in Abhängigkeit der Koordinate ξ und den
gegebenen Größen. Beachten Sie, dass insbesondere die Massenträgheitsmomente nicht
als gegeben angesehen werden können. (2,0 Punkte)
˙ = 1 M1 ξ˙2 + 1 m ξ˙2 + 1 M2 ξ˙2
Ekin (ξ)
2
2
2
" ˙ #2
" ˙ #2
1 1
ξ
ξ
1 1
2
2
+
+
M1 R
M2 R
2 2
R
2 2
R
| {z } | {z }
| {z } | {z }
θ1
θ2
ϕ̇2
ϕ̇2
1
2
d)
Für einen nicht näher spezifizierten Sonderfall und unter Verwendung einer abweichenden
Koordinate η ergeben sich im Folgenden die Energien des Systems zu
Epot (η) = 3 m g η sin(α) + 1/2 c η 2
,
Ekin (η) = 2 m η̇ 2
.
Stellen Sie basierend auf diesen Energien die Bewegungsgleichung dieses Sonderfalls bezüglich η auf. (2,0 Punkte)
4 η̈ +
c
η + 3 g sin α = 0
m
Bestimmen Sie, basierend auf obiger Bewegungsgleichung, die Eigenkreisfrequenz ω0 sowie
die Periodendauer T der Eigenschwingung des Systems. (2,0 Punkte)
ω0 =
r
c
4m
T = 2π
r
4m
c
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Frühjahr 2014
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
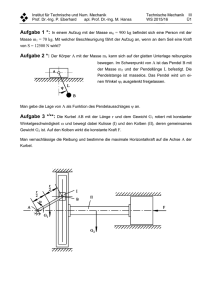
Aufgabe 1 (Seite 1 von 3)
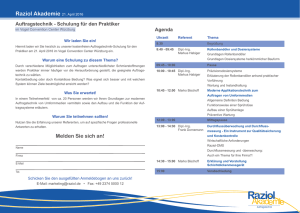
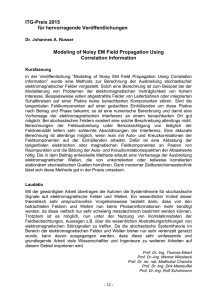
Das dargestellte System besteht aus homogenen, starren Körpern, die durch dehnstarre
Seile miteinander verbunden sind und sich im Schwerefeld der Erde (Erdbeschleunigung
g) befinden. Die jeweiligen Massen, Massenträgheitsmomente und Abmessungen sind der
Zeichnung zu entnehmen. Rolle 2 wird von dem konstanten Drehmoment M0 angetrieben.
Der Haftreibungskoeffizient zwischen der Rolle 1 — welche zu allen Zeitpunkten schlupffrei
abrollt — und der schiefen Ebene (Neigungswinkel α) beträgt µ0 . Das Massenträgheitsmoment der gesamten abgesetzen Rolle 3 ist durch θ3 gegeben.
x1
ϕ2
ϕ1
g
m2
m1
1
2
r2
r1
m3 , θ3
M0
3
µ0
r3
α
ϕ3
R3
x3
4
m4
x4
a)
Tragen Sie im nachfolgenden Bild sämtliche fehlenden Kräfte bzw. Momente ein. Die Auflagersymbole sollen in der Zeichnung beibehalten und nicht freigeschnitten werden. (1,5
Punkte)
θ2 ϕ̈2
m3 ẍ3
S1
θ1 ϕ̈1
S1
m1 ẍ1
H1
S4
S2
M0
m2 g
S2
S3
m4 ẍ4
θ3 ϕ̈3
m1 g
N1
m4 g
m3 g
S3
TU Dortmund
Frühjahr 2014
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 3)
b)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 1 bezüglich der der x1 -Koordinate an.
(1,0 Punkte)
S1 + H1 − m1 g sin(α) − m1 ẍ1 = 0
c)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 1 bezüglich ihres Schwerpunktes und
der ϕ1 -Koordinate an. Spezifizieren Sie θ1 mittels der gegebenen Größen. (1,0 Punkte)
−H1 r1 − 21 m1 r12 ϕ̈1 = 0
d)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezüglich ihres Schwerpunktes und
der ϕ2 -Koordinate an. Spezifizieren Sie θ2 mittels der gegebenen Größen. (1,0 Punkte)
M0 + [S2 − S1 ] r2 − 21 m2 r22 ϕ̈2 = 0
e)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 3 bezüglich der x3 -Koordinate an. (1,0
Punkte)
S3 − S2 − S4 + m3 g − m3 ẍ3 = 0
f)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezüglich ihres Schwerpunktes
und der ϕ3 -Koordinate an. (1,0 Punkte)
S4 R3 − S2 r3 − θ3 ϕ̈3 = 0
TU Dortmund
Frühjahr 2014
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 3 von 3)
g)
Geben Sie die Impulsbilanz (Kräftesatz) der Masse 4 bezüglich der x4 -Koordinate an. (1,0
Punkte)
m4 g − S3 − m4 ẍ4 = 0
h)
Geben Sie die (Winkel-)Geschwindigkeiten ẋ1 , ϕ̇1 , ẋ3 , ϕ̇3 , ẋ4 in Abhängigkeit von ϕ̇2 an.
(2,5 Punkte)
ẋ1 = r2 ϕ̇2
r2
ϕ̇1 = ϕ̇2
r1
R3 r2
ẋ3 =
ϕ̇2
R3 + r3
r2
ϕ̇2
ϕ̇3 =
R3 + r3
R3 r2
ẋ4 =
ϕ̇2
R3 + r3
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 2)
Eine Punktmasse m befindet sich auf der dargestellten Bahn und wird aus der Ruhe durch
eine vorgespannte Feder auf reibungsfreiem Untergrund bis zum Punkt A beschleunigt.
Die geraden Abschnitte der Bahn sind reibungsbehaftet (Reibkoeffizienten µ1 bzw. µ2 )
während die kreisförmigen Abschnitte (Radien R1 bzw. R2 ) reibungsfrei sind.
µ=0
E
y
µ2
α
g
R2
D
x
l2
∆x
µ1
R1
c
C
ϕ
m
N.N.
µ=0
l1
µ=0
A
B
a)
Berechnen Sie die Geschwindigkeit der Punktmasse im Punkt A in Abhängigkeit der
aufgebrachten Federstauchung ∆x.
vA =
r
c
∆x
m
Geben Sie weiterhin die Geschwindigkeit der Punktmasse im Punkt B in Abhängigkeit
von ∆x an, nachdem diese über den rauhen (Reibkoeffizient µ1 ) Bahnabschnitt AB der
Länge l1 geglitten ist.
vB =
r
c
[∆x]2 − 2µ g l1
m
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 2)
b)
Berechnen Sie den Betrag der Bahngeschwindigkeit v(ϕ) der Punktmasse im Verlauf des
ersten reibungsfreien Kreisbogens BC in Abhängigkeit des Winkels ϕ und einer als bekannt anzunehmenden Geschwindigkeit vB im Punkt B.
Setzen Sie nicht die Geschwindigkeit vB aus dem vorigen Aufgabenteil ein!
v(ϕ) =
q
vB2 − 2 R1 g [1 − cos(ϕ)]
Geben Sie weiterhin die Geschwindigkeit der Punktmasse im Punkt D in Abhängigkeit
von vB an, nachdem diese über den rauhen (Reibkoeffizient µ2 ) Bahnabschnitt CD der
Länge l2 geglitten ist.
q
vD = vB2 − 2 g [R1 [1 − cos(ϕ)] + l2 sin(α) + l2 µ2 cos(α)]
c)
Die beiden Bahnabschnitte AB und CD seien nun als reibungsfrei (µ1 = µ2 = 0) anzunehmen, die Punktmasse wird nochmals mit der Feder am Anfang der Bahn beschleunigt.
Berechnen Sie die Vorspannkraft der Feder F0 so, dass die Punktmasse im oberen Kreisbogen DE (Radius R2 ) nicht von der Bahn abhebt.
v
uc
2
vD = u
u m [∆x] −2 g [R1 [1 − cos(ϕ)] + l2 sin(α)
t| {z }
F02
cm
mit
2
m vD
≤ m g cos(α)
R2
p
F0 = c m g [R2 cos(α) + 2 [R1 [1 − cos(ϕ)] + l2 sin(α)]]
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 1 von 3)
Im dargestellten System wird ein Körper der Masse m reibungsfrei in einer Nut geführt
und ist durch eine Feder (Federsteifigkeit c) und einen Dämpfer (Dämpfungskonstante
d) innerhalb der Nut gestützt. Über eine starre, masselose Stange der Länge l ist der
Körper mit einer drehbaren Scheibe (Radius R, Masse M) exzentrisch (Exzentrizität e)
verbunden. Die Feder ist in der Lage ϕ = 0 ungespannt. Die Erdbeschleunigung ist zu
vernachlässigen.
c
ϕ
m
x
l
d
R
e
M
a)
Bestimmen Sie mittels der gegebenen Größen die kinetische und potentielle Energie des
Gesamtsystems. Verwenden Sie dazu die Koordinaten ϕ und x. (2,0 Punkte)
1
1
Ekin = MR2 ϕ̇2 + m ẋ2
2
2
1
Epot = c x2
2
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 2 von 3)
b)
Bestimmen Sie die virtuelle Arbeit δW der nichtkonservativen Lasten in Abhängigkeit der
Koordinate x. (1,0 Punkte)
δW = −ẋ d δx
c)
Geben Sie die kinematische Beziehung der Koordinate x als Funktion von ϕ für große
Auslenkungen an. (2,5 Punkte)
x(ϕ) = l
1−
r
e2
1 − 2 sin2 ϕ
l
!
+ e (1 − cos ϕ)
mit cos(arcsin(a)) =
√
1 − a2
d)
In dem unten dargestellten System rollt eine Scheibe (Masse M, Radius R) schlupffrei auf
dem Untergrund ab. Eine Feder (Federsteifigkeit c) ist exzentrisch (Exzentrizität e) an
der Scheibe angebracht. An ihrem äußeren Rand ist die Scheibe des Weiteren mit einem
Dämpfer (Dämpfungskonstante d) verbunden. In der dargestellten Ruhelage der Scheibe
(ϕ̇ = 0) ist die Feder ungespannt. Die Erdbeschleunigung ist zu vernachlässigen.
ϕ
d
e y
x
R
c
M
Frühjahr 2014
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 3 von 3)
Bestimmen Sie die Bewegungsdifferentialgleichung des Systems bezüglich der Koordinate
ϕ unter der Annahme kleiner Auslenkungen. Geben Sie unbedingt wesentliche Zwischenschritte an, welche zur Lösung der Aufgabe notwendig sind. (3,5 Punkte)
ϕ̈ + ϕ̇
2 c e2
8d
+ϕ
=0
3M
3 R2 M
Wie lauten die Eigenkreisfrequenz ω0 und der Abklingkoeffizient δ des Systems? (1,0
Punkte)
ω0 =
r
2 c e2
3 R2 M
δ=
4d
3M
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2013
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Körpern, die durch dehnstarre,
schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der Erde
(Erdbeschleunigung g) befinden. Die jeweiligen Massen und Abmessungen der Körper
sind der Zeichnung zu entnehmen. Es wird davon ausgegangen, dass die Massen 1 und 6
auf rauhen schiefen Ebenen gleiten.
ϕ2
R2
g
m
x1
1
r2
m2
r5
ϕ5
m5
x6
m
6
β
α
R3
x3
C
m3
ϕ3
x4
m4
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 3)
a)
Zeichnen Sie ein vollständiges Freikörperbild (2 Punkte)
m5 g
m2 g
S5
Ax
S3
m1 g
S2
S3
m6 g
H
6
m3 g
Bx
S4
H
1
N
1
S2
S6
6
S
1
Ay
Dy
N
S1
Dx
m4 g
S4
b)
Geben Sie die Impulsbilanz (Kräftesatz) der Masse 1 bezüglich der x1 -Koordinate an.
(1 Punkt)
m1 ẍ1 = −S1 − H1 + m1 g sinβ
c)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezüglich ihres Schwerpunktes
und der ϕ2 -Koordinate an. Spezifizieren Sie das Massenträgheitsmoment θ2 mittels der
gegebenen Größen, wobei der kleinere Radius r2 zu vernachlässigen ist. (1 Punkt)
1
m R2 ϕ̈
2 2 2 2
= S1 R2 − S2 r2
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 3 von 3)
d)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 3 bezüglich der x3 -Koordinate an.
(1 Punkt)
m3 ẍ3 = S2 + S3 − S4 − m3 g
e)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezüglich des Punktes C und der
ϕ3 -Koordinate an. Spezifizieren Sie die Massenträgheitsmomente θ3 mittels der gegebenen
Größen. (1 Punkt)
1
m R2 ϕ̈
2 3 3 3
+ m3 R32 ϕ̈3 = 2S2 R3 − m3 gR3 − S4 R3
f)
Geben Sie die Impulsbilanz (Kräftesatz) der Masse 6 bezüglich der x6 -Koordinate an.
(1 Punkt)
m6 ẍ6 = S5 − m6 g sinα − H6
g)
Es sei nun das folgende modifizierte System
gegeben. Geben Sie ϕ˙2 , ϕ˙3 und x˙3 in Abhängigkeit von x˙1 für das modifizierte System
an. (3 Punkte)
ϕ2
R2
x1 m1
ϕ˙2 (x˙1 ) =
ẋ1
R2
ẋ1 r2
ϕ˙3 (x˙1 ) =
2R2 R3
ẋ1 r2
x˙3 (x˙1 ) = −
2R2
g
r2
m2
β
R3
x3
m3
ϕ3
x4
m4
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 2)
Ein punktförmiger Körper der Masse m gleitet von einer Kraft F angetrieben auf einer
reibungsbehafteten schiefen Ebene vom Punkt O zum Punkt A. Auf dem reibungsbehafteten Abschnitt beträgt der Gleitreibungskoeffizient µ. Die Kraft F wirkt ausschließlich
im Abschnitt O − A auf das System ein. Sämtliche Kreisbögen weisen den Radius r auf.
B
A
ϕ0
C
r
r
ϕ0
D
∆l
c
µ
g
α
α
m
N.N.
O
l1
F
a)
Berechnen Sie die Größe der richtungstreuen, zeitlich konstanten Kraft F , derart dass der
Massenpunkt im Punkt A die Geschwindigkeit vA erreicht. Der Massenpunkt befindet sich
im Punkt O in Ruhe. (3 Punkte)
F = 12 mvA2 cosl α + m g (µ cos α + sin α)
b)
Wie groß muss der Betrag der Geschwindigkeit vA mindestens sein, damit der Massenpunkt den Punkt B erreicht? (1 Punkt)
Hinweis: Es soll hier davon ausgegangen werden, dass die Kraft F nicht mehr auf die
Masse einwirkt und diese ständigen Kontakt zur Bahn haben soll.
vA ≥
p
2gr (1 − sin ϕ0 )
TU Dortmund
Herbst 2013
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 2)
c)
Wie groß darf die Geschwindigkeit vA des Massenpunkts maximal sein, damit der Massenpunkt die Bahn auf seinem Weg vom Punkt A zum Punkt B nicht verlässt? (3 Punkte)
vA ≤
√
gr sin ϕ0
d)
Der Betrag der Geschwindigkeit der Punktmasse im Punkt A ist nun durch vA so vorgegeben, dass beide Kriterien aus den vorherigen Teilaufgaben erfüllt sind. Geben Sie die
Geschwindigkeit des Massenpunktes in Abhängigkeit der Geschwindigkeit vA im Punkt D
an. (1 Punkt)
vD = vA
e)
Im Punkt D stößt der Massenpunkt gegen eine starre Kontaktplatte, die mit einer Feder
der Steifigkeit c verbunden ist. Legen Sie die Steifigkeit der Feder c so aus, dass sich
eine maximale Stauchung der Feder von ∆l einstellt. Der Betrag der Geschwindigkeit der
Punktmasse im Punkt D ist durch vD gegeben. (2 Punkte)
c=
2 )
(2mg∆l sin α+mvD
2
∆l
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 1 von 2)
Ein System aus starren, homogenen Stäben (Länge 2 l und Länge l) und einer starren,
homogenen Kreisscheibe (Radius l/2) ist im Punkt A drehbar gelagert. Die Komponenten
sind starr aneinander befestigt und das System ist darüber hinaus mit den dargestellten
Federn und Dämpfern (Materialkonstanten sind der Zeichnung zu entnehmen) verbunden.
Im Punkt B wird das System durch eine zeitabhängige Kraft F (t) belastet, wobei in der
gezeichneten Ausgangslage F (t = 0) = 0 gilt und die Federn ungespannt sind. Der Einfluss der Schwerkraft ist zu vernachlässigen.
l
d
l
D
C
c
l/2
F (t)
2m
8m
B
m
y
ϕ
l
l
cT
x
A
a)
Berechnen Sie das Massenträgheitsmoment θ(A) des Systems bezüglich des Punktes A. (1
Punkt)
θ(A) = 28 m l2
b)
Geben Sie die horizontale Verschiebung xB des Punkte B sowie die horizontale Geschwindigkeitskomponente ẋD des Punktes D in Abhängigkeit von ϕ und ϕ̇ für große Auslenkungen des Systems an.( 2 Punkte)
xB =
√
10/2 l [− sin(ϕ + arctan(1/3)) + sin(arctan(1/3))]
√
ẋD = − 5 l ϕ̇ cos(ϕ + arctan(1/3))
Herbst 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 2 von 2)
c)
Geben Sie die potentielle Energie Epot bezüglich des Drehwinkels ϕ für große Auslenkungen des Systems an. (1 Punkt)
Epot = 1/2 cT ϕ2 + 5/2 c l2 [sin(arctan(1/2) − ϕ) − sin(arctan(1/2))]2
Das Massenträgheitsmoment des Systems sei nun als θ gegeben. Geben Sie die BewegungsDifferentialgleichung bezüglich des Drehwinkels ϕ für große Auslenkungen des Systems an.
(3 Punkte)
ϕ̈ + 5 d l2/θ ϕ̇ cos(ϕ + arctan(1/2))2 + cT /θ ϕ
+ 5 c l2/(2 θ) [2 cos(arctan(1/2) − ϕ) [sin(arctan(1/2 − ϕ)) − sin(arctan(1/2))]]
√
= 10 F (t) l/(2 θ) cos(ϕ + arctan(1/2))
d)
Es ist nun folgende Bewegungs-Differentialgleichung für große Auslenkungen in φ gegeben:
4 θ φ̈ + 3 d l2 cos(φ) φ̇ + c l2 7 sin(φ) cos(φ) + sin(φ) + 2 sin(φ)2 = l cos(φ) F (t)
Geben Sie die linearisierte Form der gegebenen Bewegungs-Differentialgleichung für kleine
Auslenkungen (φ ≪ 1) an. (1 Punkt)
φ̈ + 3 d l2 /θ φ̇ + 2 c l2 /θ φ = F (t) l/(4 θ)
Geben Sie für F (t) = F0 cos(Ω t) die Weg-Zeit-Funktion φ(t) für den eingeschwungenen
Zustand an. Spezifizieren Sie dazu die Konstanten der allgemeinen Lösung: (2 Punkte)
φ(t) = C cos(Ω t − φ0 )
q
2
2
2
2
2
C = F0 l/ 4 θ 4 δ Ω + [ω − Ω ]
tan(φ0 ) = 2 δ Ω/(ω 2 − Ω2 )
δ = 3 d l2/(8 θ)
p
ω = 2 c l2 /θ
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Frühjahr 2013
Frühjahr 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Körpern, die durch dehnstarre,
schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der Erde
(Erdbeschleunigung g) befinden. Die beiden den Freiheitsgraden ϑ1 und ϑ2 zugeordneten Planetenrollen (je Radius r3 , Masse m3 ) sind an einen ortsfest drehbar gelagerten
Planetenträger (Gesamtmasse M2 ) angeknüpft und rollen in einem rauhen Hohlzylinder
schlupffrei ab. Das Seil wird über eine in Punkt A gelagerte Stufenrolle (Masse M1 ) gelenkt und von einem Masseklotz (Masse M0 ) gezogen.
R1
ls
r1
α
ϑ2
µ
r3 , m3
M2
ψ
eϕ
r2
R2
A
ϕ
r3 , m3
er
x0
M0
g
ϑ1
µ
a)
Zeichnen Sie ein Freikörperbild ohne Trägheitskräfte.
G1ϕ
G1r
S2
N1
α
H1
M2 g
G1ϕ
m3 g
G1r
M1 g
α
g S
2
Ax
G2r
G2ϕ
Bx
H2
Ay S1
S1
By
G2ϕ
m3 g
G2r
N2
M0 g
TU Dortmund
Frühjahr 2013
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 3)
Geben Sie die Impulsbilanz (Kräftesatz) des Klotzes (Masse M0 ) bzgl. der x0 -Koordinate
an.
M0 ẍ0 = M0 g − S1
Geben Sie die Drehimpulsbilanz (Drallsatz) der in Punkt A gelagerten Stufenrolle bezüglich ihres Schwerpunktes und der ψ-Koordinate an. Die schwerpunktsbezogene Massenträgheit sei als θ1 gegeben und soll hier nicht spezifiziert werden.
θ1 ψ̈ = S1 r1 − S2 R1
Geben Sie die Drehimpulsbilanz (Drallsatz) des ortsfest drehbar gelagerten Planetenträgers (Gesamtmasse M2 ) bezüglich seines Schwerpunktes und der ϕ-Koordinate an. Die
schwerpunktsbezogene Massenträgheit sei als θ2 gegeben und soll hier nicht spezifiziert
werden.
θ2 ϕ̈ = S2 r2 − G1ϕ [R2 + ls ] − G2ϕ [R2 + ls ]
b)
Spezifizieren Sie nun das schwerpunktsbezogene Massenträgheitsmoment θ2 des Planetenträgers. Der Planetenträger besteht aus einer Stufenrolle (kleine Stufung: Radius r2 ,
Masse M2 /3, große Stufung: Radius R2 , Masse 2 · M2 /3) und zwei angeschweißten Stäben
(je Länge ls , Masse ms ).
"
2 #
l
1 M2 2 1 2
1
s
r +
M2 R22 + 2
ms ls2 + ms
+ R2
θ2 =
2 3 2 23
12
2
Frühjahr 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 3 von 3)
c)
Geben Sie die Winkelgeschwindigkeit ϑ̇1 in Abhängigkeit von ϕ̇ an.
ϑ̇1 (ϕ̇) = ϕ̇
R2 + ls
r3
d)
Geben Sie nun die Winkelgeschwindigkeiten ψ̇, ϕ̇, ϑ̇1 und ϑ̇2 in Abhängigkeit von ẋ0 an.
ψ̇(ẋ0 ) =
ẋ0
r1
ϕ̇(ẋ0 ) = ψ̇
R1
R1
= ẋ0
r2
r1 r2
ϑ̇1 (ẋ0 ) = ẋ0
ϑ̇2 (ẋ0 ) = ϑ̇1
R1 [R2 + ls ]
r1 r2 r3
(s.o.)
Frühjahr 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 2)
Ein punktförmiger Körper der Masse m beginnt im Punkt O aus der Ruhelage heraus
eine glatte, schiefe Ebene (Länge L, µ = 0) herunterzugleiten. Im Punkt 1 geht die schiefe Ebene tangential in eine rauhe Kreisbahn über (Gleitreibungskoeffizient µ, Radius r,
Winkel θ). Die Geschwindigkeit zwischen Punkt 1 und 2 ist mittels eines äußeren Antriebs
konstant gehalten, so dass in diesem Bereich v = const. und insbesondere |v 1 | = |v 2 | = v
gilt.
Die rauhe Kreisbahn mündet im Punkt 2 tangential in eine rauhe, schiefe Ebene (Neigungswinkel β, Länge L, µ=0). Im Punkt 3 befindet sich ein punktförmiger Körper der
Masse 2 m, welcher dort in Ruhe gehalten wird. Im Punkt 3 geht die glatte, schiefe Ebene
tangential in eine glatte Kreisbahn über (µ=0). Im Punkt 4 befindet sich das Ende einer
elastischen Feder (Steifigkeit/Federkonstante c). Das System befindet sich im Schwerfeld
der Erde (Erdbeschleunigung g).
L
m
g
O
1 µ
r θ
H
ψ
2
L
L/4
α
β
`
2m
3
ϕ
r C
β
4
x
N.N.
a)
O
Geben Sie die potentielle Energie Epot
im Punkt O bezüglich des vorgegebenen Nullniveaus
N.N. in Abhängigkeit der Größen m, g, H, r und ϕ an.
O
Epot
= m g [H + r (1 − cos(ϕ/2))]
TU Dortmund
Frühjahr 2013
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 2)
b)
Geben Sie die Reibkraft R(ψ) als Funktion von ψ unter Berücksichtigung der Vorgabe
|v1 | = v bzgl. des Punktes 1 an.
Hinweis: Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!
R(ψ) = µ [m g cos(π/2 − (θ + α) + ψ) − m v 2 /r]
Berechnen Sie die auf der Strecke von Punkt 1 zu Punkt 2 verrichtete Reibarbeit WR .
WR = µ m [−v 2 θ + g r cos(α) − g r cos(θ + α)]
c)
Nehmen Sie an, dass nun |v3 | = v am Punkt 3 vorgegeben ist. Geben Sie den Betrag
der Geschwindigkeit beider Massen v̄1 (für Masse m) und v̄2 (für Masse 2 m) unmittelbar
nach dem vollplastischen Stoß an.
Hinweis: Mit Ausnahme des Kraftstoßes sind alle etwaigen Kräfte während des Stoßvorgangs zu vernachlässigen!
|v̄1 | = v/3
|v̄2 | = v/3
d)
Bestimmen Sie die Federsteifigkeit/Federkonstante c derart, dass die maximale Stauchung
der Feder l/5 betragen soll. Nehmen Sie hier an, dass nur ein Körper der Masse 3 m
Kontakt mit der Feder hat. Die Geschwindigkeit dieser Masse ist im Punkt 4 zu v4 =
|v4 | = 6 v vorgegeben.
v 2 − 30 m g sin β
C = 2700 m
2
L
L
Frühjahr 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Lösung 3 (Seite 1 von 2)
Das dargestellte System befindet sich im Schwerefeld der Erde (Erdbeschleunigung g).
Das masselose Seil rollt schlupffrei über zwei homogene Kreisscheiben (Massen M, m und
Radien R, r). Dessen Ende ist mit einer Parallelschaltung einer Feder (Federsteifigkeit c)
und eines Dämpfers (Dämpfungskonstante d) verbunden. Das Seil soll als stets gespannt
angenommen werden. Die Feder ist in der Ausgangslage ungespannt.
c
d
M, R
g
h
y
N.N.
m, r
Geg.: m, M, r, R, c, d, g.
a)
Geben Sie die gesamte kinetische Energie Ekin sowie die gesamte potenzielle Energie Epot
des Systems in Abhängigkeit des Freiheitsgrades y an.
Ekin = ẏ 2 (M + 34 m)
Epot = 2cy 2 − mgy + Mgh
4
Frühjahr 2013
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Lösung 3 (Seite 2 von 2)
b)
Geben Sie die zugehörige Bewegungs-Differentialgleichung an.
3
mÿ
2
+ 2M ÿ + 4cy − mg + 4dẏ = 0
4
c)
Bei vernachlässigter Schwerkraft und Federsteifigkeit (g = c = 0) sowie einem bestimmten, nicht näher aufgeführten Verhältnis zwischen den Massen hat die Bewegungsdifferentialgleichung die Form
5 m ÿ + d ẏ = 0.
Geben Sie y(t) für die Anfangsbedingungen y(t = 0) = 0, ẏ(t = 0) =
d
m
an.
d
y(t) = 5 − 5e(− 5m )t
2
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Herbst 2012
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 1 von 2)
Ein System aus starren, homogenen Stäben ist im Punkt A drehbar gelagert und des Weiteren mit den dargestellten Federn und Dämpfern (Materialkonstanten sind der Zeichnung
zu entnehmen) verbunden. Im Punkt D ist zusätzlich eine Punktmasse (Masse m) angebracht. Im Punkt E wird das System durch eine zeitabhängige Kraft F (t) belastet, wobei
in der gezeichneten Ausgangslage F (t = 0) = 0 gilt und die Federn ungespannt sind. Der
Einfluss der Schwerkraft ist zu vernachlässigen.
y
d
D
l
m
ϕ
F (t)
m
cT
B
C
x
E
c
l
A
l
4m
d
2l
a)
Berechnen Sie das Massenträgheitsmoment θ(A) des Systems bezüglich des Punktes A.
θ(A) =
20
m l2
3
b)
Geben Sie die vertikale Verschiebung yB des Punktes B sowie die Geschwindigkeitskoordinate ẋD des Punktes D in Abhängigkeit von ϕ und ϕ̇ für große Auslenkungen des Systems
an.
yB = sin(ϕ) l
ẋD = ϕ̇ cos(ϕ) l
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 2)
c)
Das Massenträgheitsmoment des Systems sei nun als θ gegeben. Geben Sie für die Annahme kleiner Auslenkungen (ϕ ≪ 1) die Bewegungs-Differentialgleichung bezüglich des
Drehwinkels ϕ an.
ϕ̈ +
5 d l2
c l 2 + cT
2 l F (t)
ϕ̇ +
ϕ=
θ
θ
θ
Nennen Sie die Bedingung für die Federkonstante c, so dass sich für das gegebene System
eine schwach gedämpfte Schwingung ergeben würde.
25 d2 l4 − 4 cT θ
c>
4 θ2 l2
Spezifizieren Sie für F (t) = F0 cos(Ω t) die Konstanten C und ϕ0 der allgemeinen Lösung
ϕ(t) = C cos(Ω t − ϕ0 )
für den eingeschwungenen Zustand.
5 d l2
δ=
C= p
2θ
θ 4 δ 2 Ω2 + [ ω 2 − Ω2 ]2
r
2
2δΩ
c l + cT
ω=
ϕ0 = arctan
2
2
ω −Ω
θ
2 l F0
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Körpern, die durch dehnstarre, schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der
Erde (Erdbeschleunigung g) befinden. Die jeweiligen Massen und Abmessungen sind der
Zeichnung zu entnehmen. Es wird davon ausgegangen, dass die Rollen 1 und 3 auf rauhen
Ebenen schlupffrei abrollen. Dabei wird Rolle 1 von dem konstanten Drehmoment M0 die
schiefe Ebene hinauf angetrieben. Die Umlenkrolle in Punkt A ist als masselos anzusehen.
1 2
ϕ1
R1
x1
g
ϕ2
M0
r1
m1
m2
3
x3
r2
A
r3
α
ϕ3
m3
x4
4
m4
a)
Zeichnen Sie ein vollständiges Freikörperbild
M0
m1 g
m3 g
S2
S3
S1
H1
H3
S3
N3
N1
S1
S2
m4 g
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 3)
b)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 1 bezüglich der x1 -Koordinate an.
−S1 + H1 − m1 g sin(α) = m1 ẍ1
c)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 1 bezüglich ihres Schwerpunktes
und der ϕ1 -Koordinate an. Nehmen Sie θ1 als gegeben an.
M0 − S1 r1 − H1 R1 = θ1 ϕ̈1
d)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 2 bezüglich ihres Schwerpunktes
und der ϕ2 -Koordinate an. Spezifizieren Sie θ2 mittels der gegebenen Größen.
S2 r 2 − S1 r 2 =
1
m2 r22 ϕ̈2
2
e)
Geben Sie die Impulsbilanz (Kräftesatz) der Rolle 3 bezüglich der x3 -Koordinate an.
S3 − S2 − H3 = m3 ẍ3
f)
Geben Sie die Drehimpulsbilanz (Drallsatz) der Rolle 3 bezüglich ihres Schwerpunktes
und der ϕ3 -Koordinate an. Spezifizieren Sie θ3 mittels der gegebenen Größen.
H 3 r 3 − S2 r 3 =
1
m3 r32 ϕ̈3
2
g)
Geben Sie die Impulsbilanz (Kräftesatz) der Masse 4 bezüglich der x4 -Koordinate an.
S3 − m4 g = m4 ẍ4
TU Dortmund
Herbst 2012
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 3 von 3)
h)
Geben Sie die (Winkel-)Geschwindigkeiten ẋ1 , ϕ̇2 , ẋ3 , ϕ̇3 und ẋ4 in Abhängigkeit von ϕ̇1
an.
ẋ1 (ϕ̇1 ) = ϕ̇1 R1
R1 + r1
r2
R1 + r1
ẋ3 (ϕ̇1 ) = −ϕ̇1
2
R1 + r1
ϕ̇3 (ϕ̇1 ) = −ϕ̇1
2 r3
R1 + r1
ẋ4 (ϕ̇1 ) = ϕ̇1
2
ϕ̇2 (ϕ̇1 ) = −ϕ̇1
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 1 von 2)
Eine punktförmiger Körper der Masse m rutscht aus seiner Ruhelage (Höhe h bezüglich
N.N.) im Punkt O eine reibungslose Ebene hinab. Auf seinem Weg über die Punkte A
bis H passiert er 2 reibungsbehaftete Teilabschnitte mit den Gleitreibungskoeffizienten µ1
und µ2 . Sämtliche Kreisbögen weisen den Radius r auf.
y
m
O
g
I
x
D
µ1
α r
C
l2
E
r α
F
h
l1
α
rθ
N.N.
l3
B
α γ
G φ
µ2
γ
r H
A
a)
Berechnen Sie den Betrag der Geschwindigkeit der Punktmasse zwischen den Punkten A
und B als Funktion des Winkels θ.
v(θ)A→B =
p
2g[h − r (1 − Cos(θ))]
b)
Berechnen Sie den Betrag der Geschwindigkeit der Punktmasse im Punkt C.
vC =
p
2g[h − r(1 − Cos(α)) − l1 (Sin(α) + µ1 Cos(α))]
Herbst 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 2 von 2)
c)
Der Betrag der Geschwindigkeit der Punktmasse im Punkt C ist nun durch vC vorgegeben,
wobei diese als groß genug vorausgesetzt ist, um Punkt D zu erreichen. Geben Sie die
Geschwindigkeit der Punktmasse in Abhängigkeit der Größe vC in den Punkten F und G
an.
vF = vC
vG =
p
vC2 + 2gl3(Sin(α) − µ2 Cos(α))
d)
Im Punkt G stößt die Punktmasse mit dem gegebenen Geschwindigkeitsbetrag vG gegen
einen masselosen Stab, welcher mit einer Drehfeder (Federkonstante cT ) verbunden ist.
Berechnen Sie die Winkelgeschwindigkeit der Punktmasse zwischen den Punkten G und
H.
φ̇ =
q
2
[gr(1
r2
2
− Sin(γ)) + 21 vG
− gr(1 − Sin(γ + φ)) −
1
c φ2 ]
2m T
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Frühjahr 2012
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 1 von 2)
Ein starrer Stab (Länge 2 l, Masse m) ist
wie dargestellt gelagert. Die im Punkt A befindliche Drehfeder weist die Federsteifigkeit
(Federkonstante) cT , der im Punkt B angeschlossene viskose Dämpfer die Dämpferkonstante d auf. Im Punkt C ist ein System aus
parallel und seriell geschalteten Federn (Federsteifigkeiten bzw. /-konstanten c1 bis c4 )
angebracht. Zudem wird das unter dem Einfluss des Schwerefelds (Erdbeschleunigung g)
stehende System im Punkt C durch eine zeitabhängige Kraft F (t) belastet. Für den Zeitpunkt t = t0 = 0 gelte F (t0 ) = 0 sowie, dass
sämtliche Federn ungespannt sind.
c1
C
F (t)
l
c3
c2
c4
g
B
d
m
l
ϕ
y
cT
x
A
a)
Geben Sie die effektive Steifigkeit (Federkonstante) ceff des Federsystems in Abhängigkeit
der Werte c1 , c2 , c3 und c4 an.
ceff = c1 +
1
1
1
+ c +c
c2
3
4
b)
Berechnen Sie das Massenträgheitsmoment θ(A) des Stabes bezüglich des Punktes A.
θ(A) = 4/3 m l2
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 1 (Seite 2 von 2)
c)
Geben Sie die den Betrag der Geschwindigkeit vB des Punktes B sowie die horizontale
Verschiebung xC des Punktes C in Abhängigkeit von ϕ und ϕ̇ für große Auslenkungen
des Systems an.
vB = ϕ̇ l
xC = −2 l sin(ϕ)
Die effektive Steifigkeit (Konstante) des Federsystems ist nun durch den Wert c vorgegeben, ebenso ist der Wert für das Massenträgheitsmoment des Stabes bezüglich des Punktes
A als θ festgelegt. Für die Federkonstante der Drehfeder gilt des Weiteren cT = m g l.
Leiten Sie für die Annahme kleiner Auslenkungen ϕ ≪ 1 die Bewegungs-Differentialgleichung
des Systems bezüglich des Drehwinkels ϕ her.
ϕ̈ +
d l2
θ
ϕ̇ +
4 c l2
θ
ϕ=
2 F (t) l
θ
Nennen Sie die systemspezifische Bedingung für die Dämpferkonstante d, so dass sich für
F (t) ≡ 0 und ϕ(t0 ) 6= 0 eine schwach gedämpfte Schwingung ergeben würde.
d<4
p
θ c/l2
Geben Sie für die Vorgaben F (t) = F0 cos(Ω t) die Weg-Zeit-Funktion ϕ(t) für den eingeschwungenen Zustand an. Nennen Sie zunächst die allgemeine Lösung und spezifizieren
Sie dann die darin enthaltenen Konstanten.
ϕ(t) = A cos(Ω t − ϕ0 )
mit:
A = √ 2 2 2F0 l 2 2 2
θ
4 δ Ω +[ω −Ω ]
δΩ
tan(ϕ0 ) = ω22 −Ω
2
d l2
δ = 2θ
p
ω = 2 l c/θ
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 1 von 3)
Das dargestellte System besteht aus homogenen, starren Körpern, die durch dehnstarre,
schlupffrei abrollende Seile miteinander verbunden sind und sich im Schwerefeld der Erde (Erdbeschleunigung g) befinden. Die jeweiligen Massen und Abmessungen der Körper sind der Zeichnung zu entnehmen. Die
abgesetze Rolle 3 weist eine Unwucht (Exzentrizität e, Masse me ) auf, deren Lage im
Ausgangszustand durch ϕ3 = 0 gegeben ist.
Die Walze 4 rollt schlupffrei auf einer rauhen
Ebene ab und wird dabei von dem konstanten Drehmoment M0 angetrieben.
e
me
g
R3
r3
m3
ϕ3
x2
2
m2
ϕ4
r4
M0
4
m4
x4
3
ϕ2
r2
x1
1
r1 m1
a)
Ergänzen Sie die hier dargestellten Teilkörper des Systems zu vollständigen Freikörperbildern.
S2
S3
S4
m4 g
M0
H
S1 + m2 g
S1
S4
m1 g
S3
me g
N
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 2 von 3)
b)
Geben Sie den Impulssatz (Kräftesatz) der Rolle 1 bezüglich der x1 -Koordinate an.
S1 − m1 g = m1 ẍ1
Geben Sie den Impulssatz (Kräftesatz) der Rolle 2 bezüglich der x2 -Koordinate an.
S2 + S3 − S1 − m2 g = m2 ẍ2
Geben Sie den Drehimpulssatz (Drallsatz) der Rolle 2 bezüglich ihres Schwerpunktes und
der ϕ2 -Koordinate an.
S3 r 2 − S2 r 2 =
1
2
m2 r22 ϕ̈2
Geben Sie den Drehimpulssatz (Drallsatz) der Rolle 3 bezüglich des Drehzentrums und
der ϕ3 -Koordinate an.
S4 r3 − S3 R3 + me g e cos(ϕ3 ) = ( 21 m3 R32 + me e2 ) ϕ̈3
Geben Sie den Impulssatz (Kräftesatz) der Walze 4 bezüglich der x4 -Koordinate an.
− S4 + H = m4 ẍ4
Geben Sie den Drehimpulssatz (Drallsatz) der Walze 4 bezüglich ihres Schwerpunktes und
der ϕ4 -Koordinate an.
− S4 r4 − H r4 + M0 =
1
2
m4 r42 ϕ̈4
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 2 (Seite 3 von 3)
c)
Geben Sie ϕ̇2 , ẋ2 , ϕ̇3 , ϕ̇4 und ẋ4 in Abhängigkeit von ẋ1 an.
ϕ̇2 (ẋ1 ) = ẋ1 / r2
ẋ2 (ẋ1 ) = ẋ1
ϕ̇3 (ẋ1 ) = 2 ẋ1 / R3
ϕ̇4 (ẋ1 ) = ẋ1 r3 / (R3 r4 )
ẋ4 (ẋ1 ) = ẋ1 r3 / R3
d)
Betrachten Sie nun die rechts dargestellte
Walze (Masse m, Radius r) auf einer um den
Winkel α geneigten Ebene. Sie befindet sich
im Schwerefeld der Erde (Erdbeschleunigung
g), wird von dem konstanten Drehmoment
M0 angetrieben und rollt schlupffrei auf der
rauhen Ebene ab.
g
x
ϕ
r
M0
m
α
√
Die Walze bewege sich mit ẋ(t = 0) = 2 r g fort und es gelte x(t = 0) = − r. Wie groß
muss M0 sein, so dass zum Zeitpunkt t∗ die Zusammenhänge ẋ(t∗ ) = 0 und x4 (t∗ ) = 3 r
gelten?
M0 = m g r [sin(α) −
3
]
4
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 1 von 2)
Eine punktförmige Masse m beginnt im Punkt O aus der Ruhelage heraus eine rauhe,
schiefe Ebene (Neigungswinkel α, Länge l, Gleitreibungskoeffizient µ) herunterzugleiten.
Im Punkt A geht die schiefe Ebene tangential in eine glatte Kreisbahn über (µ = 0).
Diese mündet im Punkt B tangential in eine rauhe, schiefe Ebene (Neigungswinkel β,
Länge l, Gleitreibungskoeffizient µ). Im Punkt C geht die schiefe Ebene in eine glatte
Bahn über, die im Punkt D tangential in eine glatte, schiefe Ebene (Neigungswinkel γ,
Länge a, µ = 0) übergeht. Am Ende dieser schiefen Ebene ist eine Feder (Federkonstante
c, ungespannte Länge a/6) befestigt. Das System befindet sich im Schwerefeld der Erde
(Erdbeschleunigung g).
O
x1
m
l
g
α
µ=0
A
µ
ϕ r
B
h
x2
l
µ
a
c
x3
β
C
D
γ
a/6
N.N.
µ=0
a)
O
Geben Sie die potentielle Energie Epot
im Punkt O bezüglich des vorgegebenen Nullniveaus
N.N. an.
O
Epot
= m g h oder m g [l (sin(α) + sin(β)) + r (cos(α) − cos(β))]
Berechnen Sie den Betrag |v A | der Geschwindigkeit im Punkt A.
|vA | =
p
2 g l [sin(α) − µ cos(α)]
Frühjahr 2012
TU Dortmund
Fakultät Maschinenbau
Institut für Mechanik
Prof. Dr.-Ing. A. Menzel
Prof. Dr.-Ing. J. Mosler
Aufgabe 3 (Seite 2 von 2)
b)
Der Betrag der Geschwindigkeit im Punkt A sei nun als |v A | = vA gegeben. (Hinweis:
Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!)
Geben Sie den Betrag der Geschwindigkeit der Punktmasse auf der Bahn zwischen den
Punkten A und B in Abhängigkeit von ϕ an.
|v|(ϕ) =
p
vA2 − 2 g r [cos(ϕ) − cos(α)]
Wie groß darf vA maximal sein, so dass die Punktmasse nicht von der Kreisbahn abhebt?
vA ≤
p
g r [3 cos(β) − 2 cos(α)]
c)
Der Betrag der Geschwindigkeit im Punkt B sei nun als |v B | = vB gegeben. (Hinweis:
Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen!)
Bestimmen Sie die Gesamtenergie des Massepunktes bei x2 = l/2.
Eges (x2 = l/2) =
1
2
m vB2 + m g l [sin(β) − µ cos(β) / 2]
Bestimmen Sie den Betrag der Geschwindigkeit im Punkt D.
|vD | =
p
vB2 + 2 g l [sin(β) − µ cos(β)]
d)
p
Der Betrag der Geschwindigkeit im Punkt D sei nun als |vD | = vD = 5/3 g a sin(γ)
vorgegeben. (Hinweis: Nicht mit dem Ergebnis der vorherigen Teilaufgabe weiterrechnen! Die gegebene Geschwindigkeit ergibt sich nicht aus dem System!)
Um welchen Betrag ∆a wird die Feder gestaucht?
∆a = 0