Kinematik - ETH Zürich
Werbung

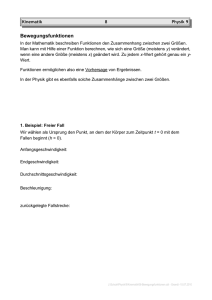
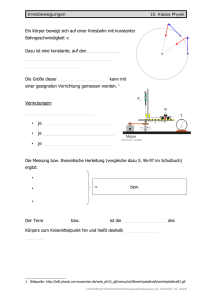
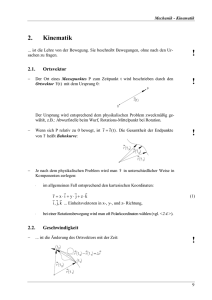
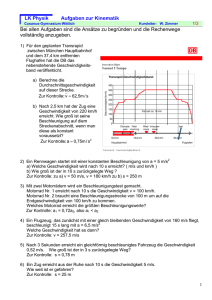
Kinematik Kapitel 2 2.1 Bewegung Kinematik Die Bewegungsvorgänge finden im Raum und in der Zeit statt. Ein Körper kann sich von einem Ort zu einem anderen Ort bewegen. Ein frei beweglicher Körper hat im Raum drei Freiheitsgrade. D. h., der Körper kann sich in drei unabhängige Richtungen bewegen: oben, unten, rechts, links, vorwärts und zurück. Ein Körper ist relativ zu einem anderen in Bewegung, wenn sich seine Lage im Raum, gemessen relativ zum zweiten Körper, mit der Zeit verändert. Andererseits sagt man, dass sich ein Körper relativ in Ruhe befindet, wenn sich seine relative Lage mit der Zeit nicht verändert. Sowohl Ruhe wie Bewegung sind relative Begriffe. Wir beginnen mit der klassischen Mechanik. Eine genaue Beschreibung der Bewegungsvorgänge ist wichtig für ein Verständnis der physikalischen Welt. Ein Haus und ein Baum sind z.B. relativ zur Erde in Ruhe, aber sie sind relativ zur Sonne in Bewegung. Viele Wissenschaftler haben zum Fortschritt der klassichen Mechanik beigetragen, wie zum Beispeil, Archimedes (-287– -212), Galileo Galilei (1564-1642), Copernicus (1473-1543), Tycho Brahé (15461601) und J. Kepler (1571-1630). Der bekannteste Schöpfer der klassischen Mechanik ist natürlich Sir Isaac Newton (1642-1727). Seine drei Newtonschen Gesetze sowie sein Gravitionsgesetz bilden die Basis der gesamten Mechanik. Wenn ein Zug durch eine Station fährt, sagen wir, dass sich der Zug relativ zur Station in Bewegung befindet. Ein Passagier des Zuges könnte aber genausogut sagen, dass sich die Station relativ zum Zug in Bewegung befindet, und zwar in entgegengesetzter Richtung. 2.1.1 Massenpunkte oder Teilchen Die physikalischen Gesetze, die der Bewegung zugrunde liegen, werden wir nachher im Rahmen der Dynamik studieren. Um unsere Betrachtung von Bewegung zu vereinfachen, beginnen wir zunächst mit Gegenständen, deren Position im Raum durch die Angabe der Koordinaten eines Punktes beschrieben werden kann. Einen solchen Gegenstand nennen wir ein Teilchen. Im Rahmen der Kinematik wird die Bewegung eines Teilchens rein geometrisch charakterisiert. Physik 51 52 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung Kinematik Man spricht auch von Massenpunkt und meint damit einen idealisierten Körper, dessen Masse in einem Punkt konzentriert ist. Wir studieren die Bewegung makroskopischer Körper, die als solche Massenpunkte betrachtet werden können. In diesem Fall verstehen wir als Massenpunkt einen Körper, dessen räumliche Ausdehnung als vernachlässigbar betrachtet werden soll. Für manche Zwecke ist es z.B. sinnvoll, die Erde als Teilchen zu betrachten: in diesem Fall bewegt sich das Teilchen “Erde” auf einer fast kreisförmigen Bahn um die Sonne. Der Begriff des Massenpunktes ist natürlich eine Idealisierung, und ob eine Masse als Massenpunkt betrachtet werden kann, hängt vom Problem ab. Stroboskopisches Bild der Bewegung eines Balls. In diesem Bild ist das Zeitintervall Dt zwischen den Blitzen lang, so dass es schwierig ist, die Bewegung zu verstehen. Figur 1. 2.1.2 Beschreibung der Bewegung: die stroboskopische Lampe Mit einer stroboskopischen Lampe, können wir die Position eines Körpers zu verschiedenen Zeiten beobachten. Das Zeitintervall (Dauer) zwischen zwei Blitzen der stroboskopischen Lampe wird Dt genannt. Mit der stroboskopischen Methode können wir eine Liste von Positionen zu verschiedenen Zeiten aufstellen. Diese Liste wird die Bewegung beschreiben. Gleich wie in Figur 1, aber mit kleinerem Dt, es ist leichter, die Bewegung zu verstehen. Figur 2. Physik 53 54 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung Kinematik Wie man in der Abb. 1 sehen kann, wird die Bewegung mit schlechter Genauigkeit beschrieben, wenn das Zeitintervall Dt zwischen den Blitzen der Lampe gross ist. Wenn das Zeitintervall kleiner gemacht wird, ist die Bewegung besser beschrieben, wie in Abb. 2 dargestellt ist. Wenn das Zeitintervall Dt gegen null geht, wird man eine kontinuierliche (funktionale) Beziehung zwischen der Lage und der Zeit gewinnen. s1 (a) (b) Die Verbesserung der Beschreibung mit kleiner werdenden Zeitintervallen ist in Abb. 3 dargestellt. s2 s1 (c) s1 (d) s1 (e) s1 (f) Die Bewegung wird besser charakterisiert, je kleiner das Zeitintervall Dt ist. a) Dt=1/15 s, b) Dt=10/15 s, c) Dt=6/15 s, d) Dt=3/15 s, e) Dt=2/15 s, f) Dt=1/15 s. Figur 3. Physik 55 56 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in einer Dimension Kinematik 2.2 Bewegung in einer Dimension Wenn wir annehmen, dass sich der Körper zur Zeit t1 bei der Position x1 und zur späteren Zeit t2 bei x2 befindet, so ist die Verschiebung: Dx ∫ x 2 - x1 = x ( t2 ) - x ( t1 ) Am Anfang beschränken wir uns auf die Bewegung in einer Dimension. D.h., dass die Bewegung des Körpers geradlinig ist, seine Bahn ist eine gerade Linie. Die Verschiebung kann natürlich einen positiven oder negativen Wert besitzen, abhängig von der Bewegungsrichtung. Einfache Beispiele: 1. 2. 3. ein Auto, das auf einer ebenen, geraden und schmalen Strasse fährt; ein Flugzeug, das auf einer bestimmten Höhe fliegt; ein Zug, der auf einer geraden Strecke fährt. Verschiebung Dx x2 x1 Bei der Bewegung entlang einer geraden Linien gibt es nur zwei mögliche Richtungen: die positive und die negative. –20 Siehe Abb. 4. –15 –10 –5 0 5 10 15 Ursprung Positive Richtung Man führt auf dieser Geraden zunächst ein Koordinatensystem ein, in dem man einen Ursprung O und eine positive Richtung wählt. Negative Richtung Die übliche Konvention mit positiven x-Werten nach der rechten Seite des Urspunges wird verwendet. Figur 4. Jedem Punkt auf der Geraden entspricht eine Zahl x, die den Abstand des Punktes vom Ursprung angibt. Bewegung in einer Dimension. Definition der Verschiebung. 2.2.1 Der Begriff der Geschwindigkeit Der Begriff der Geschwindigkeit ist uns aus dem Alltag vertraut. Wir können ihn von einer Analyse der stroboskopischen Bilder verstehen. Wenn der Körper sich bewegt, wird sich seine Lage mit der Zeit verändern. Dann kann der Ort x des Körpers mit der Zeit t durch eine funktionale Beziehung in Zusammenhang gebracht werden: Die stroboskopischen Bilder stellen nicht nur die Bewegung dar, sondern, weil das Zeitintervall zwischen den Blitzen der Lampe konstant ist, auch die Geschwindigkeit, mit der der Körper sich bewegt. x ∫ x ( t) (wir sagen, dass die Koordinate x von der Zeit t abhängt). Siehe Abb. 5 und 6. Physik 20 x (m) 57 58 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in einer Dimension Kinematik Dt Dt Dt Dt Wir definieren die mittlere Geschwindigkeit (oder Durchschnittsgeschwindigkeit) als Dt vm ∫ Zeit: t1 t2 t3 t4 t5 t6 Ort: x1 x2 x3 x4 x5 x6 Dx x 2 - x1 x ( t2 ) - x ( t1 ) = = Dt t2 - t1 t2 - t1 wobei Dx die Verschiebung des Körpers darstellt und Dt die verstrichene Zeit. Siehe Abb. 7. –20 –15 Figur 5. –10 –5 0 5 10 15 20 x (m) Die MKS-Einheit der Geschwindigkeit ist Meter pro Sekunde (m/s). Die Verschiebung kann sowohl positive als auch negative Werte annehmen. Die mittlere Gewschindigkeit kann auch positive oder negative Werte annehmen, je nachdem, ob x2 grösser oder kleiner als x1 ist. Ein positiver Wert entspricht einer Bewegung nach rechts, ein negativer Wert einer Bewegung nach links. Bewegung eines Wagens mit konstanter Geschwindigkeit. Dt Dt Dt Dt Dt Zeit: t1 t2 t3 t4 t5 t6 Ort: x1 x2 x3 x4 x5 x6 Dt v1= –20 –15 Figur 6. –10 –5 0 5 10 15 Dt v 2= x3–x2 Dt Dt x4–x3 Dt v3= –10 –5 x1 x 2 0 x3 v4 = Dt x5–x4 Dt Dt v5= x6–x5 Dt 20 x (m) –20 Bewegung eines Wagens mit sich verändernder Geschwindigkeit. –15 Figur 7. Physik x2–x1 Dt 59 60 5 10 x4 Definition der mittleren Geschwindigkeit Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) 15 x5 20 x (m) x6 Kinematik Bewegung in einer Dimension Als Folge der Definition der mittleren Geschwindigkeit folgt die Beziehung für die zurückgelegte Verschiebung Dx in einem Zeitintervall Dt: Dieses Verhältnis entspricht genau der mittleren Geschwindigkeit im Zeitintervall Dt und wir haben eine geometrische Bedeutung der Geschwindigkeit gewonnen. Dx = v m Dt Die mittlere Geschwindigkeit entspricht der Steigung der Geraden, die die Punkte (x1,t1) und (xi,ti) (i=2,3,4,...) verbindet. oder x 2 - x1 = v m ( t2 - t1 ) fi x 2 = v m ( t2 - t1 ) + x1 In der eindimensionalen Bewegung kann das Teilchen sich nur nach rechts oder links bewegen. Das Vorzeichen der Geschwindigkeit wird dann positiv oder negativ sein. Wie erwartet, ist die Geschwindigkeit ein Mass für den in einem bestimmten Zeitintervall zurückgelegten Abstand. Um die momentane Geschwindigkeit in einem Punkt zu bestimmen, müssen wir das Zeitintervall Dt so klein “wie möglich” machen. In der Sprache der Mathematik bedeudet das, dass wir den Grenzwert des Quotienten berechnen. Der zurückgelegte Abstand Dx ist zum Zeitintervall Dt und zur Geschwindigkeit vm proportional. 2.2.2 Die momentane Geschwindigkeit Das wird in der Form v = lim v m = lim Wenn die funktionale Beziehung zwischen x und t bekannt ist, kann die Bewegung des Körpers als Funktion der Zeit geplottet werden. Siehe z.B. Abb. 8. Dt Æ 0 Dx Dt geschrieben. Dieser Grenzwert ist aber gleich der Ableitung1 von x nach der Zeit, d. h., Die Kurve des Orts eines Körpers als Funktion der Zeit wird als das “Weg-Zeit-Diagramm” oder die x-t-Kurve bezeichnet. v ( t) = Die Verschiebung Dx=xi-x1 (wobei i=2,3,4) und das entsprechende Zeitintervall Dt=ti-t1 (wobei i=2,3,4) zwischen verschiedenen Punktpaaren (i=2,3,4) sind in der Abbildung eingetragen. dx dt 1. Die Geschwindigkeit, die als ein Grenzwert definiert ist, wird heute im Bereich der Physik nicht mehr als ein fundamentales Konzept der Mechanik betrachtet. Wir werden später sehen, dass ein solcher Grenzwert im Bereich der Quantenphysik nicht mehr benutzt werden kann. Die Definition der momentanen Geschwindigkeit soll “nur” als ein Begriff verstanden werden, der sehr nützlich ist für die Beschreibung der Bewegung von makroskopischen Körpern. Diese Definition soll nur benutzt werden in Fällen, in denen der Effekt der sogenannten Unschärferelation von Heisenberg nicht bemerkt werden kann. Diese wird im Kapitel 14 der Quantenphysik genauer studiert. Die Strecke zwischen zwei Punkten ist die Hypotenuse des rechtwinkligen Dreiecks mit den Katheten Dx und Dt. Das Verhältnis Dx/Dt ist demnach die Steigung dieser Strecke. Physik Dt Æ 0 61 62 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in einer Dimension Kinematik Es folgt daraus, dass die momentane Geschwindigkeit v(t) des Körpers zu jeder Zeit t durch die Ableitung der Funktion x(t) nach der Zeit t gewonnen werden kann. x x-t-Kurve 140 x3,t3 Beispiel: Ein Körper bewegt sich auf solche Weise entlang der xAchse, dass seine Position zu jedem Zeitpunkt durch 120 x ( t) = 5 t 2 + 1 100 Dx x1,t1 gegeben ist, wobei x in Metern und t in Sekunden angegeben ist. 1. x ( 3) - x (2) 46 - 21 = 25 m / s = 3- 2 3- 2 60 Tangente 40 Mittlere Geschwindigkeit im Zeitintervall zwischen 2 s und 2,1 s: vm = 3. Dt 80 Mittlere Geschwindigkeit im Zeitintervall zwischen 2 s und 3s: vm = 2. x4,t4 x2,t2 x (2,1) - x (2) 23, 05 - 21 = = 20, 5 m / s 2,1 - 2 0,1 20 Mittlere Geschwindigkeit im Zeitintervall zwischen 2 s und 2,001 s: 0 0 1 2 3 4 5 6 7 4. Mittlere Geschwindigkeit im Zeitintervall zwischen 2 s und 2,00001 s: Figur 8. Die x-t-Kurve (oder “Weg-Zeit”-Diagramm). x (2, 00001) - x (2) 21, 0002 - 21 = = 20, 001 m / s vm = 2, 00001 - 2 0, 00001 5. Momentane Geschwindigkeit: v= Physik dx = 10 t fi dt 8 9 t x (2, 001) - x (2) 21, 02 - 21 = = 20, 005 m / s vm = 2, 001 - 2 0, 001 v ( t = 2) = 20 m / s 63 64 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in einer Dimension Kinematik 2.2.3 Der Begriff der Beschleunigung Beispiel: Bewegung eines Lifts Die Beschleunigung basiert auf folgendem Konzept: Die Beziehungen zwischen Position, Geschwindigkeit und Beschleunigung sind in Abb. 9 dargestellt, im Fall der Bewegung eines Liftes. Wenn sich die momentane Geschwindigkeit eines Körpers mit der Zeit verändert, dann sagen wir, der Körper werde beschleunigt. 1. 2. Die mittlere Beschleunigung in einem bestimmten Zeitintervall Dt ist als das Verhältnis Dv/Dt definiert am = 3. Dv v ( t2 ) - v ( t1 ) = Dt t2 - t1 wobei Dv = v 2 – v 1 die Änderung der momentanen Geschwindigkeit im Zeitintervall Dt=t2–t1 ist. Man bemerkt, dass die Änderung der Geschwindigkeit in den Zeitintervallen Dt1 (von t=1 bis t=3s) und Dt2 (von t=8 bis t=9s) gleich sind, aber mit entgengesetztem Vorzeichen. Weil Dt2 halb so gross ist wie Dt1, ist die Beschleunigung während Dt2 doppelt so gross, wie während Dt1, Im MKS-System wird die Beschleunigung als Meter pro Sekunde im Quadrat ausgedrückt ( m § s 2 ) . Wie bei der Geschwindigkeit definieren wir nun die momentane Beschleunigung als Grenzwert der mittleren Beschleunigung für immer kleiner werdende Zeitintervalle: a( t) = lim Dt Æ 0 In Abb. 9a) ist die x(t)-Kurve des Liftes gezeigt, wenn er sich nach oben entlang der x-Achse bewegt. In b) die Geschwindigkeit v(t) des Liftes. Sie ist die zeitliche Ableitung der x(t)-Kurve. In c) die Beschleunigung. Sie ist die zeitliche Ableitung der v(t)Kurve. Sie ist positiv wenn die Geschwindigkeit zunimmt, und negativ wenn die Geschwindigkeit abnimmt. Dieser Effekt in einem Lift ist uns vertraut, weil unser Körper diese Beschleunigungen spürt. Dv dv = Dt dt Die Beschleunigung ist damit als die zeitliche Ableitung der Geschwindigkeit definiert. Da die Geschwindigkeit selbst als Ableitung des Ortes x nach der Zeit definiert ist, ist die Beschleunigung die zweite Ableitung von x nach t, geschrieben als a( t) = Physik dv d Ê dx ˆ d 2 x = Á ˜∫ dt dt Ë dt ¯ dt 2 65 66 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in einer Dimension Kinematik Lage x (m) 2.3 Integration der Bewegung Wir haben gesehen, wie man die Geschwindigkeitsfunktion v(t) und die Beschleunigungsfunktion a(t) durch Ableitung der Ortsfunktion x(t) nach der Zeit t gewinnen kann. 20 Integration der Bewegung: Das umgekehrte Problem ist, die Funktion x(t) zu finden, wenn die Geschwindigkeit v(t) oder die Beschleunigung a(t) gegeben ist. 10 Dazu müssen wir Integration anwenden. 0 0 2 4 6 8 10 Geschwindigkeit (m/s) Zeit t (s) Wenn wir wissen, wie sich die Geschwindigkeit mit der Zeit ändert, d.h., wenn wir v=v(t) kennen, dann können wir die Position x zu jedem Zeitpunkt durch Integration erhalten. Es gilt 4 3 v(t ) = 2 1 2 4 6 8 fi dx = v(t )dt Um die physikalische Bedeutung dieser Gleichung zu verstehen, muss man sich errinern, dass vdt die Verschiebung des Körpers innerhalb des kleinen Zeitintervalls dt darstellt. 0 0 dx dt 10 2 Beschleunigung (m/s ) Zeit t (s) Jetzt werden wir sehen, dass die Positionsfunktion x(t) die Stammfunktion von v(t) ist. 2 Wir nehmen an, dass sich der Körper zur Zeit t0 im Punkt x0 befindet. Um die Position des Körpers zur Zeit t zu berechnen, integrieren wir dx=v(t)dt von t0 bis t: 0 -2 t Ú v (t¢)dt¢ = -4 0 2 4 6 8 10 t0 Zeit t (s) x( t ) Ú x( t0 ) x( t ) dx = Ú dx = x (t) - x x0 wobei t’ als Integrationvariable betrachtet wird. Figur 9. Physik Beispiel der Bewegung eines Liftes. 67 68 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) 0 Integration der Bewegung Kinematik a) Gleichförmige, geradlinige Bewegung. Wenn sich ein Körper in gleichförmiger, geradliniger Bewegung befindet, ist seine Geschwindigkeit v konstant. Daher ist Damit folgt t x ( t) = Ú v ( t¢ ) dt¢ + x 0 v(t ) = Konst. fi t0 dv =0 dt fi a( t ) = 0 Wir wissen aus der Mathematik, dass d.h., es gibt keine Beschleunigung! Es folgt für konstante Geschwindigkeit v(t)=v0, dass der Stammfunktion eine beliebige Integrationskonstante hinzugefügt werden muss, um die allgemeine Lösung zu erhalten. Die Konstante x0 ist durch die Position des Körpers zu einem bestimmten Anfangszeitpunkt gegeben, der gewöhnlich bei t=0 gewählt wird. Diese Angabe dieser Konstante wird deshalb Anfangsbedingung genannt. t t0 t0 t0 mit x0=x(t0). b) Gleichförmig beschleunigte, geradlinige Bewegung. Die Bewegung eines Teilches mit konstanter Beschleunigung kommt in der Natur häufig vor. So fallen z.B. alle Gegenstände aufgrund der Gravitation senkrecht nach unten. t und t = x 0 + v 0 ( t - t0 ) Da wir zweimal integrieren müssen um x(t) aus a(t) zu erhalten, treten nun zwei Konstanten x0 und v0 auf. Diese Konstanten sind durch die Anfangsbedingungen der Geschwindigkeit und der Position des Teilchens gegeben: v ( t) = Ú a( t¢ ) dt¢ + v 0 t x ( t) = x 0 + Ú v ( t¢ ) dt¢ = x 0 + v 0 Ú dt¢ x ( t) = Ú v ( t¢ ) dt¢ + x 0 Wenn sich ein Körper in gleichförmig beschleunigter geradliniger Bewegung befindet, ist seine Beschleunigung a(t)=a0 konstant. Es folgt daher t0 2.3.1 Einige spezielle Bewegungsvorgänge t t t0 t0 v ( t) = v 0 + Ú a( t¢ ) dt¢ = v 0 + a0 Ú dt¢ Wir werden nun zwei wichtige Bewegungen betrachten. = v 0 + a0 ( t - t0 ) Die Bewegungsgleichungen, die wir hier herleiten, werden immer wieder benötigt werden. mit v0=v(t0). Physik 69 70 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Integration der Bewegung Kinematik 2.3.2 Beschleunigung durch die Gravitation Für den Ort erhalten wir damit In der Nähe der Erde spürt jeder Körper die sogenannte Erdbeschleunigung. Diese Beschleunigung wird durch eine Anziehung zwischen der Erde und dem Körper (Gravitationskraft) verursacht. t x ( t) = x 0 + Ú v ( t¢ ) dt¢ t0 t = x 0 + Ú (v 0 + a0 ( t¢ - t0 )) dt¢ Wenn der Luftwiderstand als vernachlässigbar betrachtet werden kann, beobachten wir, dass jeder Körper, unabhängig von seinem Gewicht, dieselbe Erdbeschleunigung erfährt. Wir nennen diese Beschleunigung die Erdbeschleunigung g. t0 1 = x 0 + v 0 ( t - t0 ) + a0 ( t - t0 ) 2 2 Die Richtung dieser Beschleunigung ist nach unten zum Erdzentrum gerichtet. Der Betrag ist Wenn wir x0=0, v0=0 und t0=0 setzen, werden die Gleichung vereinfacht Lage x (m) 1 x (t ) = a0 t 2 2 v(t ) = a0 t g ª 9, 8 m / s2 a(t ) = a0 Wenn wir uns von der Erde entfernen, wird die Gravitationsbeschleunigung abnehmen. Zum Beispiel, in einer Höhe von ª2500 km, ist die Erdbeschleunigung ungefähr halb so gross, wie auf der Erdoberfläche, oder gª5 m/s2. 40 20 0 0 2 4 6 8 Auf anderen Planeten ist die Beschleunigung verschieden. Zum Beispiel, auf dem Mond ist g nur ungefähr 1/6 der Erdbeschleunigung, d.h. 10 Geschwindigkeit (m/s) Zeit t (s) 10 7.5 gMond ª 1, 67 m / s 2 5 2.5 0 0 2 4 6 8 10 2 Beschleunigung (m/s ) Zeit t (s) 2 Demonstrationsexperiment: Fallversuch. Die Fallzeit eines Gegenstandes, der aus verschiedenen Höhen fallen gelassen wird, wird gemessen. Aus diesen Messungen bemerken wir, dass die Fallzeit proportional zur Quadratwurzel der Höhe ist. 1.5 1 0.5 0 0 2 4 6 8 10 Zeit t (s) Figur 10. Physik Bewegung mit konstanter Beschleunigung 71 72 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Integration der Bewegung Kinematik Gleichförmig beschleunigte Bewegung: h= 1 2 1 2 a t = gt 2 0 2 fi t= 2h g Fallversuch 0.6 0.5 Tabelle 1 zeigt eine Liste von gerechneten Fallzeiten mit einer Erdbeschleunigung g=9.81m/s2. Fallzeit (s) TABLE 1. Tabelle der Fallzeiten. Höhe h (m) Fallzeit (s) 0.1 0.1428 0.2 0.2020 0.3 0.2474 0.4 0.2856 0.5 0.3193 0.6 0.3498 0.7 0.3778 0.8 0.4039 0.9 0.4284 1.0 0.4516 1.1 0.4736 1.2 0.4947 0.4947 0.4736 0.4516 0.4284 0.4 0.4039 0.3778 0.3498 0.3193 0.3 0.2856 0.2474 0.2 0.202 0.1428 Physik 0.1 0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 Höhe (m) Plot der Beziehung zwischen den Höhen und den Fallzeiten im Fallversuch. Eine Beschleunigung g=9.81m/s2 wurde verwendet. Figur 11. 73 74 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen Kinematik 2.4 Bewegung in mehreren Dimensionen Die Verschiebungsvektoren S i stellen die Bewegung des Balles im Raum dar. Der Verschiebungsvektor S 1 entspricht der Bewegung zwischen dem 1. und 2. Blitz einer stroboskopischen Lampe, der Jetzt betrachten wir die Bewegung eines Körpers in mehreren Dimensionen. Wir werden dieselben Begriffe, die wir für die eindimensionale Bewegung eingeführt haben, aber in komplizierterer Form wieder verwenden: Verschiebung, Geschwindigkeit und Beschleunigung werden nun als Grössen aufgefasst, die Vektoren sind. Vektor S 2 zwischen dem 2. und 3. Blitz, usw. Die Trajektorie oder die Bahnkurve des Körpers im Raum wird als die Liste von Verschiebungsvektoren dargestellt. Die Kurve repräsentiert den Weg, den der Körper durchläuft. Wir verwenden noch einmal eine stroboskopische Lampe, um die Position des Körpers zu verschiedenen Zeiten zu beobachten. (Die Bahnkurve sollte nicht verwechselt werden mit den Weg-ZeitKurven auf den vorherigen Seiten.) Mit der stroboskopischen Methode können wir die Ortslagen im Raum zu verschiedenen Zeiten rekonstruieren. 2.4.1 Der Ortsvektor Abb. 12 zeigt einen Ball, der sich entlang einer Kurve im Raum bewegt. Das Bild stellt ein stroboskopisches Bild dar. Die Indizes von 1 bis 9 entsprechen den Blitzen der stroboskopischen Lampe. s2 s1 2 1 Der Ursprung ist als der Nullpunkt des Koordinatensystems definiert. Mit Hilfe eines mehrdimensionalen Koordinatensystems, können die Punkte auf der Bahnkurve durch die Koordinaten dargestellt werden. s3 3 4 s4 s8 s5 5 Der Ortsvektor ist als die Verschiebung zwischen dem Ursprung und dem Punkt im Raum definiert. 9 s7 s6 6 Figur 12. Wir werden ein Koordinatensystem definieren, relativ zu welchem die Bewegung beschrieben wird. 8 7 Abb. 13 zeigt, wie die Verschiebungsvektoren S i , die früher definiert Verschiebungsvektoren. Dieses Bild stellt die Bewegung des Balles wurden, mit Hilfe der Ortsvektoren r i dargestellt werden können: r r r Si ∫ ri +1 - ri i = 1, 2, 3, 4,... im Raum dar. Der Verschiebungsvektor S 1 entspricht der Bewegung zwischen dem 1. und 2. Blitz einer stroboskopischen Lampe, S 2 zwischen dem 2. und 3. Blitz, usw. Physik 75 76 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen r1 Kinematik r3 r2 s2 s1 2 y s3 r4 3 1 heitsvektoren zu berechnen. Im Abb. 13 haben wir z.B. die 2dimensionalen kartesischen Koordinaten verwendet: r r r r r ∫ r ( t) = x ( t)ex + y ( t)ey 4 s4 r5 s5 5 r6 r 7 6 s8 Wir bemerken, dass im kartesischen Koordinatensystem die Basisvektoren fest sind, d.h., sie sind zeitlich konstant. 9 s7 s6 8 7 ey Ursprung O Figur 13. Man kann auch die Kugelkoordinaten verwenden: r r r r ∫ r ( t) = r( t)er ( t) x ex In diesem Fall hängt der Einheitsvektor vom Punkt ab. Der Einheitsvektor er wird deshalb von der Zeit abhängen. Darstellung der Verschiebungsvektoren S i und der Ortsvektoren ri . Die Koordinate r(t) wird nur den radialen Freiheitsgrad darstellen. Die anderen Freiheitsgrade werden durch die Änderung der Richtung des Einheitsvektors er berücksichtigt. Wie im Fall der Bewegung in einer Dimension, wird die Bewegung umso besser beschrieben, je kleiner das Zeitintervall Dt ist. 2.4.2 Der Geschwindigkeitsvektor Deshalb betrachten wir den Grenzfall, für den Dt nach null geht. Die Lage des Teilchens wird damit als eine funktionale Beziehung zwischen den Ortsvektoren und der Zeit beschreiben. Diese Beziehung entspricht der Bahnkurve des Körpers und wird als r r r ∫ r ( t) Um einen mittleren Geschwindigkeitsvektor zu erhalten, nehmen wir einen Verschiebungsvektor und dividieren ihn durch das Zeitintervall Dt, d.h. r r r r Si ( ri +1 - ri ) vi ∫ = (i = 1, 2, 3,...) ti +1 - ti Dt geschrieben (Vergleich mit Kap. 2.2). Wir haben in Kap. 1.5 gesehen, dass mit Hilfe einer Vektorbasis Vektoren durch ihre Komponenten dargestellt werden können. Siehe Abb. 14. Der Geschwindigkeitsvektor zeigt in die Richtung der Bewegung und sein Betrag ist gleich der mittleren Geschwindigkeit. Im Fall des Ortsvektors können wir auch eine bestimmte Basis verwenden, um die Komponenten als Projektionen auf gegebene Ein- Physik 77 78 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen Kinematik Die momentane Geschwindigkeit ist ein Vektor, der tangential zur Bahn ist, und der durch die zeitliche Ableitung des Ortsvektors gegeben ist: r r dr v ( t) = dt i S i = r i + 1 —r i ri r i +1 0 S0 1 0 —r i ) (r Si = i +1 Vi = t t ey ex v0 = a) Figur 14. v0 v0 v0 = S0 Dt b) S0 Dt Dt = 0.1 Sec Dt = 0.4 Sec Definition des Geschwindigkeitsvektors. S0 In Abb. 15 sehen wir, dass der Betrag des Verschiebungsvektors nicht gleich dem tatsächlich durchlaufenen Weg ist, der entlang der Kurve gemessen wird. Der Betrag des Verschiebungsvektors ist kleiner als diese Distanz. 1 v0 01 v ~i momentane Geschwindigkeit S0 v0 = Wenn wir jedoch immer kleiner werdende Zeitintervalle betrachten, dann nähert sich der Betrag der Verschiebung der tatsächlichen Strecke an, die das Teilchen entlang der Kurve zurücklegt. c) S0 Dt Dt = 0.025 Sec v ~i = d) Dt Si Dt 0 Sec Die Richtung des mittleren Geschwindigkeitsvektors nähert sich dabei der Richtung der Tangente an die Kurve an. Figur 15. Definition der momentanen Geschwindigkeit. Wir haben gesehen, dass die Berechnung der mittleren Geschwindigkeit, wenn Dt nach null geht, zu einer zeitlichen Ableitung führt. Physik 79 80 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen Kinematik Um die Ableitung zu bestimmen, verwenden wir die Ergebnisse des Kap. 1.5.4 (wir betrachten 2 Dimensionen): r r r dr d r xe + yey = v ( t) = dt dt x r r dey dex dy r dx r e +x = + ey + y dt dt dt dt x dx r dy r e + e = dt x dt y und damit r r r der d cosfex + sin fey = dt dt r r dey r r de d d = (cosf ( t))ex + cosf x + (sin f ( t))ey + sin f dt dt dt dt df r df r e e + cosf = - sin f dt y dt x df r e = dt f ( ( ) wobei wir verwendet haben, dass die kartesischen Einheitsvektoren festgelegt sind. In ähnlicher Weise kann man beweisen, r def df r = - er dt dt Wir können damit den Geschwindigkeitsvektor so ausdrücken: r r r dx r dy r e + e v ( t) = v x ( t)ex + v y ( t)ey = dt x dt y Mit diesen Ergebnissen ist der Geschwindigkeitsvektor im Kugelkoordinatensystem gleich r r df r de dr r dr r v ( t) = er + r r = er + r ef dt dt dt dt wobei vx(t) und vy(t) die Komponenten der Geschwindigkeit sind. In Kugelkoordinaten wurde die Geschwindigkeit so berechnet: r r r r r de dr dr r r ( t) = rer fi v ( t) = = er + r r dt dt dt Wir können das Ergebnis so interpretieren: Wir müssen nun die zeitliche Ableitung des Basisvektors bestimmen. Wir können die kartesischen Koordinaten verwenden! Es gilt (Siehe Kap. 1.5.6), r r r ÏÔer = cosfex + sin fey r r Ìr ÔÓef = - sin fex + cosfey Physik ) 81 1. Der erste Term ist die radiale Geschwindigkeit. Sie ist wie erwartet in die Richtung er gerichtet. 2. Der zweite Term ist die Geschwindigkeitskomponente senkrecht zu er in Richtung von ef . 3. Der Betrag der Geschwindigkeit in Richtung von ef ist gleich r 82 df dt Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen Kinematik Im Allgemeinen werden sich beide Komponenten r und f in einer beliebigen Bahnkurve ändern. In diesem Fall tragen beide Terme bei und der Geschwindigkeitsvektor ist durch die Summe von zwei Vektoren, die in die Richtung von er resp. ef zeigen, gegeben. Andererseits, wenn der Geschwindigkeitsvektor denselben Betrag und dieselbe Richtung hat, nennen wir dies eine Bewegung mit konstanter Geschwindigkeit. Siehe Abb. 16a). Abb. 16b) und c) zeigen solche Arten von Beschleunigung. In b) ändert sich nur der Betrag der Geschwindigkeit, und in c) nur die Richtung. Wir bemerken, dass der Geschwindigkeitsvektor “per Definition” zur Bahnkurve tangential ist. Wir betrachten die zwei folgenden Fälle: 1. a) Wenn r=Konst., ist der Geschwindigkeitsvektor gleich r df r df r df r dr r v ( t) = er + r ef = 0 + r ef = r ef dt dt dt dt 2. b) D.h., nur der zweite Term trägt zur Geschwindigkeit bei und er entspricht der tangentialen Geschwindigkeit. Dies ist z.B. der Fall bei der Kreisbewegung (Siehe Kap. 2.6). Wenn f=Konst., ist der Geschwindigkeitsvektor gleich V1 V1 V3 V2 V2 V4 V3 V5 V4 V6 V5 V1 V2 c) V3 V4 r dr r df r dr r dr r v ( t) = er + r ef = er + 0 = er dt dt dt dt a) Bewegung mit konstanter Geschwindigkeit. b) und c) sind beschleunigte Bewegungen. Figur 16. D.h., die Geschwindigkeit ist radial gerichtet. Der momentane Beschleunigungsvektor ist der Grenzwert der mittleren Beschleunigung, wenn das Zeitintervall gegen null geht. D.h., der momentane Beschleunigungsvektor ist die zeitliche Ableitung des Geschwindigkeitsvektors. 2.4.3 Der Beschleunigungsvektor Der Vektor der mittleren Beschleunigung wird definiert als das Verhältnis der Änderung der Geschwindigkeit zum Zeitintervall Dt: r r r r r (v - v ) (v - v ) (i = 1, 2, 3,...) ai ∫ i +1 i = i +1 i Dt ti +1 - ti Man muss beachten, dass der Geschwindigkeitsvektor seinen Betrag, seine Richtung oder beides ändern kann. Von Beschleunigung spricht man, wenn der Geschwindigkeitsvektor in irgendeiner Weise variiert. Physik V7 83 84 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Bewegung in mehreren Dimensionen Kinematik wobei wir die folgenden Ergebnisse verwendet haben: r r def der df r df r ef und = = - er dt dt dt dt Um die Ableitung zu bestimmen, verwenden wir die Ergebnisse des Kap. 1.5.4 (wir betrachten 2 Dimensionen): r r r r dv d v ( t)ex + v y ( t)ey a ( t) = = dt dt x r r dey dex dv y r dv x r e + vy e + vx = + dt dt y dt dt x dv x r dv y r e + e = dt x dt y 2 2 d xr d yr = 2 ex + 2 ey dt dt ( ) Die Beschleunigung kann so ausgedrückt werden: Ê d 2 r Ê df ˆ 2 ˆ r Ê dr df r d 2f ˆ r + r 2 ˜ ef a ( t ) = Á 2 - r Á ˜ ˜ er + Á 2 Ë dt ¯ ¯ dt ¯ Ë dt dt Ë dt Diese allgemeine Form sieht kompliziert aus! Wir werden sie später in mehr Einzelheiten studieren (Siehe Kap. 2.6 und Kap. 11.3). wobei wir verwendet haben, dass die kartesischen Einheitsvektoren festgelegt sind. Wir können damit den Beschleunigungsvektor so ausdrücken: r r r dv r dv y r d 2 x r d 2 y r e e + e = a( t) = ax ( t)ex + ay ( t)ey = x ex + dt dt y dt 2 x dt 2 y wobei ax(t) und ay(t) die Komponenten der Beschleunigung sind. In Kugelkoordinaten wird die Beschleunigung so berechnet: r r df r ˆ dv d Ê dr r = Á e + r ef ˜ = a ( t) = dt ¯ dt dt Ë dt r r r 2 df def d 2f r d r r dr der dr df r ef + r 2 ef + r = 2 er + + dt dt dt dt dt dt dt dt 2 d 2f r d 2 r r dr df r dr df r Ê df ˆ r ef + r 2 ef - rÁ ˜ er ef + = 2 er + Ë dt ¯ dt dt dt dt dt dt Physik 85 86 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Zerlegung der Bewegung Kinematik wobei 2.5 Zerlegung der Bewegung Wir wollen jetzt die Bewegungsgleichung von zweidimensionalen Bewegungen integrieren. r r r0 = r (0) Diese Bewegungsgleichung wird mit den Komponenten geschrieben als: Für eine Bewegung mit gleichförmiger Beschleunigung (d.h., ein konstanter Beschleunigungsvektor a(t)=a0), finden wir die folgende vektorielle Gleichung: r r r 1r r ( t) = r0 + v 0 t + a0 t 2 2 r r 1 1 = ( x 0 + v 0 x t + a0 x t 2 )ex + ( y 0 + v 0 y t + a0 y t 2 )ey 2 2 r r r v ( t) = v 0 + Ú a( t¢ ) dt¢ t 0 Wir diskutieren nun eine wichtige Folgerung dieser Gleichungen: r r = v 0 + a0 Ú dt¢ t Die Bewegungsgleichungen sagen voraus, dass die senkrechten x- und y- Komponenten der Bewegung unabhängig voneinander sind. 0 r r = v 0 + a0 t mit Für eine mehrdimensionale Bewegung werden wir ein ähnliches Resultat finden: r r v 0 = v (0) Eine beliebige Bewegung kann immer in unabhängige Komponenten zerlegt werden. Nun fügen wir 2-dimensionale kartesische Einheitsvektoren ein: r r r r r v ( t) = v 0 x ex + v 0 y ey + a0 x ex + a0 y ey t r r = (v 0 x + a0 x t)ex + (v 0 y + a0 y t)ey ( ) In der Praxis wird man versuchen, unabhängige Komponenten zu wählen, die die einfachste Beschreibung der Bewegung erlauben. Wir können z.B. verstehen, dass Kugelkoordinaten nicht am besten geeignet sind, um eine geradlinige Bewegung zu beschreiben. Mit einer ähnlichen Herleitung findet man für den Ortsvektor: r r r r ( t) = r0 + Ú v ( t¢ ) dt¢ t Wir bemerken, dass diese Zerlegung in unabhängige Komponenten nicht ganz trivial ist. Sie muss mit Versuchen überprüft werden. 0 r r 1r = r0 + v 0 t + a0 t 2 2 Physik 87 88 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Zerlegung der Bewegung Kinematik 2.5.1 Demonstrationsexperiment: Wurf im bewegten System Das Teilchen erfährt während des Fluges eine konstante nach unten gerichtete Beschleunigung (Erdbeschleunigung) r r r a( t) = a0 = - gey ( g > 0) Eine wichtige Anwendung der Bewegung in zwei Dimensionen ist die eines Teilchens, das in die Luft geworfen oder geschossen wird und sich dann frei bewegen kann. Der Anfangsgeschwindigkeitsvektor ist definiert als: r r r r v 0 = v ( t = 0) = v 0 x ex + v 0 y ey In diesem Versuch wird geprüft, ob die horizontalen und vertikalen Komponenten der Bewegung unabhängig voneinander sind. Wir zerlegen die Bewegung in die zwei unabhängige Komponenten: Ein Ball (das Teilchen) wird von einem Wagen aus senkrecht in die Luft geworfen. Siehe Abb. 17. x-Achse (// e x ): Ï Ôax ( t) = a0 x = 0 Ô Ìv x ( t) = v 0 x + a0 x t = v 0 x Ô 1 2 Ô x ( t) = x 0 + v 0 x t + a0 x t = x 0 + v 0 x t 2 Ó fi Das Teilchen bewegt sich gleichförmig in x-Richtung Y-Achse (// e y ): Figur 17. Ï Ôay ( t) = - g Ô Ìv y ( t) = v 0 y + a0 y t = v 0 y - gt Ô 1 1 2 2 Ô y ( t) = y 0 + v 0 y t + a0 y t = y 0 + v 0 y t - gt 2 2 Ó Wurf im bewegten System. fi Das Teilchen bewegt sich in gleichförmig beschleunigter Bewegung in y-Richtung. Um diese Bewegung zu bestimmen, betrachten wir eine zweidimensionale Bewegungsgleichung. Physik 89 90 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Zerlegung der Bewegung Kinematik Das Teilchen wird vom Wagen aus senkrecht in die Luft geworfen. 2.5.2 Demonstrationsexperiment: Schuss auf fallende Platte Wenn der Wagen in Ruhe ist, bewegt sich der Ball senkrecht nach oben und fällt dann zu seiner ursprünglichen Position zurück. Ein zweites Beispiel für die Zerlegung der Bewegung ist der Schuss auf eine fallende Platte. Wenn der Wagen sich horizontal mit konstanter Geschwindigkeit bewegt, bewegt sich der Ball zum höchsten Punkt seiner Flugbahn, um dann wieder zurückzukehren. Der Ball wird vom Wagen wieder aufgefangen. Man zielt mit der Kanone (Siehe Abb. 18) auf die Platte, die mit einem Elektromagneten gehalten wird. Wenn man schiesst, wird der Stromkreis im Elektromagneten unterbrochen, und die Platte fällt nach unten. Die maximale Höhe der Flugbahn hängt von der senkrechten Geschwindigkeit ab, die dem Ball beim Abwurf mitgegeben wird. Die vertikale Bewegung hat nichts zu tun mit der horizontalen. Im höchsten Punkt der Bahnkurve ist die vertikale Geschwindigkeit gleich null: v y = 0 . Wir nehmen an, dass die Kugel zur Zeit tmax diesen Punkt erreicht. Wir müssen nur die vertikale Komponente der Bewegungsgleichung betrachten: v y = v 0 y - gtmax ∫ 0 fi v 0 y = gtmax fi tmax = v0y g Wenn wir diesen Wert in den Ausdruck für y einsetzen, erhalten wir 2 y max = y 0 + v 0 y v0y 1 Ê v0y ˆ 1 v0y - gÁ ˜ = y 0 + 2 g g 2 Ë g¯ Figur 18. Wie können wir eine Bedingung für das Zusammentreffen von Kanonenkugel und fallende Platte formulieren ? Gäbe es keine Erdbeschleunigung, würde die Platte nicht fallen (!), und die Kugel der Kanone würde entlang einer geraden Linie fliegen. Wir bemerken, dass diese Gleichungen unabhängig von der horizontalen Anfangsgeschwindigkeit v 0x sind. Physik Die verwendete Kanone, um auf die fallende Platte zu schiessen. 2 91 92 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Zerlegung der Bewegung Kinematik Die Bewegungsgleichung der Kugel würde in diesem Fall (d.h. keine Erdbeschleunigung) lauten: r r r a0 = 0 fi v K ( t) = v 0 r r r fi rK ( t) = r0 + v 0 t Wir müssen nun die Komponenten verwenden, um die Richtung der Kanone durch einen Winkel bezüglich der horizontalen Achse zu definieren. Es muss gelten, r r r v 0 ∫ v 0 x ex + v 0 y ey r r r r fi v 0 x TTreffen ex + v 0 y TTreffen ey = Dex + hey Ïv 0 x TTreffen = D fi Ì Ó v 0 y TTreffen = h Hier haben wir angenommen, dass die Kugel zur Zeit t=0 abgeschossen wird. Wir nehmen auch als Ursprung des Koordinatensystems den Ort an, wo die Kugel abgeschossen wird. Um die Bewegung in der einfachsten Weise zu beschreiben, wählen wir die vertikale und die horizontale Richtungen als Richtungen der y- und x-Achsen: y h O tan q = v0y h = v0x D abgeschossen werden muss. Wenn der Winkel diese Bedingung erfüllt, wird die Kugel die Platte treffen. r v0 D v0y h = v0x D D.h., dass die Kugel unter einem Winkel D=horizontaler Abstand zwischen Kanone und Platte h=Höhe der Platte Platte fi Jetzt betrachten wir den Fall mit mit der Erdbeschleunigung. Der Effekt der Erdbeschleunigung muss in die Bewegungsgleichung der Kugel eingefügt werden: r r r r r a0 = g fi v K ( t) = v 0 + gt r r 1r fi rK ( t) = v 0 t + gt 2 2 x Der Ortsvektor der Kugel ist schliesslich gleich (Beachte: keine Erdbeschleunigung): r r rK ( t) = v 0 t Andererseits ist die Bewegungsgleichung der Platte gleich r r r r r a0 = g und v 0 = 0 fi v P ( t) = gt r r 1r fi rP ( t) = r0,P + gt 2 2 Um die Platte zu treffen, muss man die Kanone richten, so dass, r r r r rK (TTreffen ) = v 0TTreffen = Dex + hey wobei D der horizontale Abstand zwischen der Kanone und der Plattte ist, h die Höhe der Platte, und TTreffen die (noch nicht bestimmte) Zeit des Treffens. Physik 93 94 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Zerlegung der Bewegung Kinematik Der Ort des Treffens ist gegeben durch wobei r0,P der Ortsvektor der Platte zur Zeit t=0 ist. Die Bedingung für das Treffen der Kugel auf die Platte wird folgendermassen gegeben r r rK (TTreffen ) = rP (TTreffen ) r 1r fi v 0TTreffen + g TTreffen 2 r r fi v 0TTreffen = r0,P ( oder r r r v 0 ∫ v 0 x ex + v 0 y ey fi ) 2 und Ïv 0 x TTreffen = D Ì Óv 0 y TTreffen = h r 1r = r0,P + g TTreffen 2 ( ) r r 1r rP ( t) = r0,P + g TTreffen 2 ( r Ê gÊ D ˆ = Dex + Á h - Á r Á 2 Ë v 0 cosq ˜¯ Ë 2 ( ) ˆr ˜˜ ey ¯ Wäre die Anfangsgeschwindigkeit der Kugel grösser, würde sie die Platte an einem höheren Punkt treffen. v0y h fi = v0x D Die physikalischen Gründe für das Treffen der Platte und der Kugel sind: – beide spüren dieselbe Erdbeschleunigung g, so dass beide Bewegungsgleichungen den Teil Unabhängig von der Geschwindigkeit des Geschosses werden die Platte und das Geschoss aufeinandertreffen. 1r + gt 2 2 Wir können die Zeit des Treffens so bestimmen: Physik r 1Ê D ˆ r g = r0,P + Á r 2 Ë v 0 cosq ˜¯ 2 r r r r0,P = Dex + hey TTreffen = 2 2 r r 1Ê D ˆ r = Dex + hey + Á r - gey 2 Ë v 0 cosq ˜¯ 2 Aber dies wird immer der Fall sein, weil wir den Winkel der Kanone so gewählt haben, dass diese Bedingung erfüllt ist! v 0 x TTreffen = D fi ) enthalten. – die vertikale Bewegung ist unabhängig von der horizontalen, die für Platte und Geschoss ja verschieden sind. D D = r v 0 x v 0 cosq 95 96 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Die gleichförmige Kreisbewegung Kinematik In der gleichförmigen Kreisbewegung wird der Winkel proportional zur Zeit sein. Wir schreiben: 2.6 Die gleichförmige Kreisbewegung f ( t) = wt Kreisbewegungen kennen wir aus der Natur und aus dem täglichen Leben. Zum Beispiel: 1. 2. 3. 4. wobei w die Winkelgeschwindigkeit2 ist. Die Winkelgeschwindigkeit ist konstant für eine gleichförmige Kreisbewegung. Die Bewegung der Erde um die Sonne oder die des Mondes um die Erde sind ungefähr Kreisbahnen. Autos bewegen sich auf Kreisbögen, wenn sie um Kurven fahren. Räder drehen sich im Kreis. Ein Ball, der an einen Faden gebunden ist und sich so bewegt, dass der Faden gespannt ist. Die Bahnkurve des Balles wird damit auf einen Kreis gezwungen. Das Teilchen bewegt sich im Gegenuhrzeigersinn um den Kreis mit konstanter Geschwindigkeit. Die Anfangsposition zur Zeit t=0 ist r=(r,0). Das Teilchen hat einen ganzen Umlauf durchgeführt, wenn f (T ) = wT = 2p Eine Kreisbewegung wird durch den folgenden Ortsvektor beschrieben: r r r r ( t) = r(cosf ( t))ex + r(sin f ( t))ey wobei T die Periode des Umlaufs ist. T ist die für einen vollen Umlauf auf dem Kreis benötigte Zeit. Die Einheit der Winkelgeschwindigkeit ist ein Winkel pro Zeiteinheit. D.h., z.B. Radian pro Sekunde, oder Grad pro Sekunde. wobei f der Winkel ist, und r ist der konstante Radius des Kreises. Dass der Radius wirklich konstant ist, können wir durch die Berechnung des Betrags des Ortsvektors beweisen: r r r r ( t) = r(cosf ( t))ex + r(sin f ( t))ey Die Geschwindigkeit ist gleich: r r r r dr d r(coswt)ex + r(sin wt)ey v ( t) = = dt dt r r d d = r (coswt)ex + r (sin wt)ey dt dt r r = rw (- sin wt)ex + rw (coswt)ey ( = r 2 cos2 f ( t) + r 2 sin 2 f ( t) = r 2 (cos2 f ( t) + sin 2 f ( t)) = r = Konst. wobei wir die folgende gewöhnliche Beziehung benutzt haben, die für einen beliebigen Winkel a gilt: Wir können auch beweisen, dass die Geschwindigkeit senkrecht zum Radius ist. cos2 a + sin 2 a ∫ 1 2. Wir werden die Winkelgeschwindigkeit in Kap. 5 und 7 weiter diskutieren. Wenn der Radius konstant ist, ist die Bahnkurve wirklich ein Kreis. Physik 97 ) 98 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Die gleichförmige Kreisbewegung Kinematik Schliesslich wird die Beschleunigung berechnet. Es gilt, r r r r dv d rw (- sin wt)ex + rw (coswt)ey = a ( t) = dt dt r r = rw w (- coswt)ex - w (sin wt)ey r r = -w 2 r(coswt)ex + r(sin wt)ey r = -w 2 r Wir berechnen das Skalarprodukt zwischen dem Ortsvektor und dem Geschwindigkeitsvektor: r r r r r r v ◊ r = rw (- sin wt)ex + rw (coswt)ey ◊ r(coswt)ex + r(sin wt)ey ( )( = r 2w[(- sin wt)(coswt) + (coswt)(sin wt)] ) ( =0 Dass der Betrag des Ortsvektors sich mit der Zeit nicht ändert, kann durch die Berechnung der zeitlichen Ableitung des Betragsquadrats des Ortvektors (Siehe Kap. 1.5.4) bewiesen werden: r r dr r r d r r d r2 r ) = (r ◊ r ) = 2r ◊ = 2r ◊ n = 0 ( dt dt dt ( ) ) ) Die Beschleunigung zeigt zum Zentrum des Kreises. Diese Ergebnisse könnten wir auch mit Hilfe der Kugelkoordinaten herleiten. Die generelle Gleichung der Geschwindigkeit ist: r df r df r dr r v ( t) = er + r ef = 0 + r ef dt dt dt r = rwef wobei wir angenommen haben, dass der Geschwindigkeitsvektor zum Ortsvektor senkrecht ist (d.h., das Skalarprodukt verschwindet). In diesem Fall zeigt die Gleichung, dass die zeitliche Ableitung des Betrags des Ortsvektors sich nicht ändern wird. Der Betrag ist eine Konstante. wobei wir angenommen haben, dass die radiale Komponente sich mit der Zeit nicht ändert. Wegen der Definition des Einheitsvektors ist die Geschwindigkeit senkrecht zum Radius (Siehe Abb. 13 und folgende in Kap. 1.5). Man sieht auch, dass der Betrag der Geschwindigkeit konstant ist: r r r v ( t) = rw (- sin wt)ex + rw (coswt)ey In ähnlicher Weise können wir den Ausdruck der Beschleunigung herleiten: = r 2w 2 (sin 2 wt + cos2 wt) = rw = Konst. Ê d 2 r Ê df ˆ 2 ˆ r Ê dr df r d 2f ˆ r + r 2 ˜ ef a ( t ) = Á 2 - r Á ˜ ˜ er + Á 2 Ë dt ¯ ¯ dt ¯ Ë dt dt Ë dt r r 2 = 0 - r(w ) er + (0 + 0)ef 2r = - r(w ) er r = -w 2 r ( Physik ( 99 100 ) Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Die gleichförmige Kreisbewegung Kinematik Wir betrachten die gleichförmige Kreisbewegung, d.h. den Fall, in dem der Betrag des Geschwindigkeitsvektors konstant ist: r v = v = Konst. 2.6.1 Geometrische Herleitung Wir können die gleichförmige Kreisbewegung auch geometrisch betrachten. Eine stroboskopische Analyse einer solchen Bewegung zeigt die Verschiebungsvektoren. Siehe Abb. 19b). Wie früher definieren wir Dt als das Zeitintervall zwischen zwei Blitzen der stroboskopischen Lampe. Der momentane Geschwindigkeitsvektor ist in Abb. 19 dargestellt. Er ist zur Bahnkurve tangential. Wir schreiben diesen Vektor als r r r v = v 0 x ex + v 0 y ey Weil v=Konst., sind die Beträge aller Verschiebungsvektoren in der stroboskopischen Analyse gleich. und seinen Betrag als r v = v = v 02x + v 02y Mit den Verschiebungsvektoren erhalten wir die mittleren Beschleunigungsvektoren als r r r r S2 / Dt - S1 / Dt r v2 - v1 = a2 = Dt Dt ( Wir bemerken, dass sich die Richtung dieses Vektors mit der Zeit ändert. Das heisst, das Teilchen muss beschleunigt werden, um auf der Kreisbahn zu bleiben. Ball Fa n de S3 S2 S4 Damit gilt V S1 r r r S -S a2 = 2 2 1 Dt Figur 19. Gleichförmige Kreisbewegung eines Balles. a) Links: der Faden. b) Rechts: Die stroboskopische Analyse der Bewegung mit Verschiebungsvektoren. Physik ) wobei wir die Definition der mittleren Geschwindigkeit benutzt haben: r r r S r S v1 = 1 ; v2 = 2 Dt Dt Wie muss die Beschleunigung des Balles sein? r ) ( 101 102 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Die gleichförmige Kreisbewegung Kinematik Es gilt, Zuerst bemerken wir, dass der Vektor S 2 – S 1 zum Zentrum der Kreisbahn zeigt. Siehe Abb. 20. Deshalb ist die Beschleunigung auch zum Zentrum gerichtet. S3 S2 r r vDt S2 - S1 qª = r vDt wobei r der Radius des Kreises ist. S4 Wir multiplizieren die Gleichung mit v und dividieren beide Seiten durch Dt. Wir erhalten, r r v 2 S2 - S1 r = = a1 Dt 2 r – S1 S1 ( S 2 – S 1) Dieselbe Herleitung gilt für jeden Punkt der Kreisbahn. Wir haben für eine gleichförmige Kreisbewegung gefunden 1. 2. die Beschleunigung zeigt zum Zentrum des Kreises und der Betrag ist konstant in der Zeit und gleich r v2 a (t ) = r Bestimmung der Beschleunigung einer gleichförmigen Kreisbewegung. Figur 20. D.h., dass der Ball zum Zentrum des Kreises beschleunigt wird. In jedem Punkt des Kreises, muss der Beschleunigungsvektor senkrecht zum Geschwindigkeitsvektor sein und zum Zentrum des Kreises zeigen. Um den Betrag der Beschleunigung zu bestimmen, konstruieren wir zwei Dreiecke. Siehe Abb. 21. Zwei Ecken der Dreiecke haben denselben Winkel q. Physik 103 104 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich) Die gleichförmige Kreisbewegung Kinematik 1. S1 1 2 S2 q ( S 2 – S 1) S2 – S1 S2 = VDt q 3 –S1 w= wobei T die Periode des Umlaufs ist. Die (tangentiale) Geschwindigkeit: r r r v = rwef v = v = rw 3. Die (zentripetale) Beschleunigung: (c) r q S1 = VDt r r a = -w 2 r r (a) r 2p T 2. VDt S1 = Die Winkelgeschwindigkeit w: 2 r v2 Ê vˆ a = a = w 2r = Á ˜ r = Ë r¯ r q (b) Herleitung der Formel für den Betrag der Beschleunigung in einer gleichförmigen Kreisbewegung. Figur 21. Während eines Umlaufs legt das Teilchen einen Weg 2pr zurück. Die Periode T wird definiert als die benötigte Zeit, um diesen Weg zurückzulegen. Für v=Konst., gilt T= 2pr v 2.6.2 Zusammenfassung Wir haben wichtige Beziehungen hergeleitet, die im Fall der gleichförmigen Kreisbewegung gelten. Im allgemeinen können wir Winkelvariablen oder lineare Variablen verwenden: Physik 105 106 Physik I&II, WS 02/03-SS03, Prof. A. Rubbia (ETH/Zürich)