E1-05Fo3 - Bionik TU
Werbung

Ingo Rechenberg
PowerPoint-Folien zur 3. Vorlesung „Evolutionsstrategie I“
Globale und lokale Optimumsuche
Vier elementare Strategien auf dem Prüfstand
Weiterverwendung nur unter
Angabe der Quelle gestattet
x
?
4 Strategie
Strategien
Qualitätsmessung
Versuchsobjekt
Verstellbarkeit
1. Globale deterministische Suche
Experimentierkreis
2. Globale stochastische
Suche
3. Lokale deterministische Suche
4. Lokale stochastische Suche
Q
Suche nach dem Optimum
Bei schwach kausalem Weltverhalten
Bei stark kausalem Weltverhalten
m
Z
1
1
m
1. Globale deterministische Suche
Systematisches Scannen des Versuchsfeldes
G ( 2 ) m2
G( n) mn
m
Z
1
1
m
2. Globale stochastische Suche
G ( 2) 2.99 m2
Zielfindung mit 95% Wahrscheinlichkeit
G ( n ) 2.99 mn
Rechnung mit Wahrscheinlichkeitstheorie
1. Versuch Ziel getroffen:
1. Versuch Ziel nicht getroffen:
2. Versuch Ziel nicht getroffen:
3. Versuch Ziel nicht getroffen:
Wz 12
m
W z 1 12
m
W z 1 12
m
W z 1 12
m
(
(
G. Versuch Ziel nicht getroffen: W z 1 12
m
(
G. Versuch Ziel getroffen:
ln (1Wz ) G ln (1 12 )
m
2
3
ln(1 x ) x x x
2
3
2
)
)3
G
Für n Variable
(1 1Wz )
G mn ln
G
)
Wz 1 1 12
m
(
(1 1Wz )
G m2 ln
G
)
ln (1 Wz )
ln (1 12 )
m
ln (1 12 ) 12
m
m
Für Wz = 0.95
G mn 2,996
Text
1. Globale deterministische Suche
2. Globale stochastische Suche
3. Lokale deterministische Suche
4. Lokale stochastische Suche
Definition der
Fortschrittsgeschwindigkeit
j
Zurückgelegter Weg bergan
Zahl der Versuche
j
Zurückgelegter Weg bergan
Zahl der Versuche
Fortschritt d
Z
y
d
x
Linearitätsradius
3. Lokale deterministische Suche
Folgen des steilsten Anstiegs
j
(2)
grad
( n)
grad
j
d
3
d
n 1
Gradientenstrategie
Arbeitsschritt der Länge d in Richtung des steilsten Anstiegs
am Beispiel für 3 Dimensionen:
x neu x alt d
yneu yalt d
z neu zalt d
ΔQx
ΔQx2 ΔQ y2 ΔQz2
ΔQ y
ΔQx2 ΔQ y2 ΔQz2
ΔQz
ΔQx2 ΔQ y2 ΔQz2
2. Nachkomme
Elter
1. Nachkomme
Z
y
d
x
Linearitätsradius
4. Lokale stochastische Suche
Zufallsdriften entlang des steilsten Anstiegs
( 2)
j evo
?
(n)
j evo
?
Plus-Nachkomme
Schwerpunkt
Minus-Nachkomme
Elter
Linearitätsradius
Bestimmung des
linearen Fortschritts
Statistisches Mittel
des Fortschritts
Plus-Nachkomme
Schwerpunkt
Minus-Nachkomme
Elter
Linearitätsradius
Fortschrittsgeschwindigkeit:
jr sr
2
Weil die Hälfte der Kinder
Misserfolge sind !
Statistisches Mittel
des Fortschritts
Schwerpunkt
r
r
sr
2 Dim.
sr 2
r
sr
3 Dim.
1
sr r
2
sr
n Dim.
?
Plus-Nachkomme
Schwerpunkt
Minus-Nachkomme
Elter
Linearitätsradius
Bestimmung des
linearen Fortschritts
Statistisches Mittel
des Fortschritts
Plus-Nachkomme
Schwerpunkt
Minus-Nachkomme
Elter
Linearitätsradius
Fortschrittsgeschwindigkeit:
s
jv v
2
Weil die Hälfte der Kinder
Misserfolge sind !
Statistisches Mittel
des Fortschritts
Schwerpunkt
r
r
sv
sv
sv
2 Dim.
3 Dim.
n Dim.
sv 4 r
sv 3 r
8
?
Aufgabe:
1. Berechnung des Schwerpunkts einer n-dimensionalen Halbkugelschale
2. Berechnung des Schwerpunkts einer n-dimensionalen Vollhalbkugel
Der Weg zum n-dimensionalen Würfel
Strecke – Quadrat – Würfel – Tesserakt
Was ist eine n-dimensionale Kugel ?
Die Fortentwicklung einer konstruktiven mathematischen Idee
a
Beispiel:
Volumenelement
a
a
a
a
a
a
a
2
a
3
a
n
Genannt:
Stecke
Fläche
Volumen
Hypervolumen
P2
Analoge Extrapolationsidee für die
Entfernung D zweier Punkte
P1
P1 { x1 }
P1 { x1 , y1 }
P1 { x1 , y1 , z1 }
P1 { x1 , y1 , z1 ,,1 }
P2 { x2 }
P2 { x2 , y2 }
P2 { x2 , y2 , z2 }
P2 { x2 , y2 , z2 ,,2 }
D ( x2 x1 )2
D ( x2 x1 )2 ( y2 y1 )2
D ( x2 x1 )2 ( y2 y1 )2 ( z2 z1 )2
D ( x2x1)2 ( y2 y1)2 ( z2z1)2 (21)2
Zurück zur Aufgabe:
1. Berechnung des Schwerpunkts einer n-dimensionalen Halbkugelschale
2. Berechnung des Schwerpunkts einer n-dimensionalen Vollhalbkugel
Die 1. Guldinsche Regel
Eine Kurve erzeugt durch Rotation um 360
Grad eine Rotationsfläche. Dann ist die
Oberfläche der Rotationsfläche gleich der
Länge der erzeugenden Kurve mal dem
Weg des Schwerpunktes dieser Kurve.
Paul Guldin (1577 – 1643)
Die 1. Guldinsche Regel
Eine Kurve erzeugt durch Rotation um 360
Grad eine Rotationsfläche. Dann ist die
Oberfläche der Rotationsfläche gleich der
Länge der erzeugenden Kurve mal dem
Weg des Schwerpunktes dieser Kurve.
Paul Guldin (1577 – 1643)
Beispiel:
Ein Halbkreis erzeugt durch Rotation um 360° eine
Kugel. Dann ist die Oberfläche der Kugel gleich der
Länge des Halbkreislinie ( r) mal dem Rotationsweg
des Schwerpunkts des Halbkreislinie.
s
Halbkreis mit dem Radius r
Halbkreislinienschwerpunkt
Schwerpunktsweg
OKugel 2s 1 UKreis
2
Die 2. Guldinsche Regel
Eine Fläche erzeugt durch Rotation um 360
Grad einen Rotationskörper. Dann ist das
Volumen des Rotationskörpers gleich dem
Inhalt der erzeugenden Fläche mal dem
Weg des Schwerpunktes dieser Fläche.
Paul Guldin (1577 – 1643)
Die 1. Guldinsche Regel
Eine Fläche erzeugt durch Rotation um 360
Grad einen Rotationskörper. Dann ist das
Volumen des Rotationskörpers gleich dem
Inhalt der erzeugenden Fläche mal dem
Weg des Schwerpunktes dieser Fläche.
Paul Guldin (1577 – 1643)
Beispiel:
Ein Halbkreis erzeugt durch Rotation um 360° eine
Kugel. Dann ist das Volumen der Kugel gleich dem
Inhalt des Halbkreisfläche (1/2 r 2) mal dem Rotationsweg des Schwerpunkts der Halbkreisfläche.
s
Halbkreis mit dem Radius r
Halbkreisflächenschwerpunkt
Schwerpunktsweg
VKugel 2s 1 FKreis
2
OKugel
2 sr 1 UKreis
2
OKugel
sr
UKreis
VKugel
2 sv 1 FKreis
2
VKugel
sv
FKreis
(2)
UKreis 2 r OKugel
gedeutet als
sr( 2 )
sv( 2 )
(3)
O Kugel
2
OKugel
(3)
VKugel
(2)
VKugel
(3)
O
1 Dimension
D ( x1 x2 )2
Kugel
(n)
( 2)
j
jr
r
2
2
OKugel
2 Dimensionen D
( x1 x2 )2 ( y1 y2 )2
( n 1)
O Kugel
n
2 OKugel
) ( x x )2 ( y y )2 ( z z )2 ( n 1)
3 Dimensionen ( 3
D
1
2
1
2 V
VKugel 1 2
Kugel
(n)
( 2)
j
jv
v
4 Dimensionen
2 VD 2 (x1 x2 )2 ( y1 y2 )2 (z1 z22)2V(u1nu 2 )2
Kugel
Kugel
Oberfläche einer
n-dimensionalen Kugel
Volumen einer
n-dimensionalen Kugel
jr( n )
O
V
(n)
( )
n /2
n
n n R
2Γ 2
( )
n
(
2)
d
(n)
jr
2 (n 1 )
2
n
( 2 )
n
d
(n)
jr
2 (n 1 ) n 1
2
( n 1)
O Kugel
n
2 OKugel
( n 1)
VKugel
(n)
jv
n
2 VKugel
Zur Gammafunktion
n /2
n 1
2 n R
Γ 2
(n)
(verallgemeinerte Fakultät)
(x +1) = x (x), (1) = (2) = 1, (1/2) =
(m) = (m – 1)! für ganzzahlige m
n
(
2)
lim n 1
n (
2 )
Es gilt die asymptotische Formel:
jr( n ) d
2
für n >> 1
jv( n )
d
j
2
1
n
n
2 n n 1
d
1
n
1
2
n
Randverteilte
Zufallszahlen
Volumenverteilte
Zufallszahlen
für große n
Text
1,0
90
r
0,5
1
Volumen-Verteilung
1
20
40
60
80
n
100
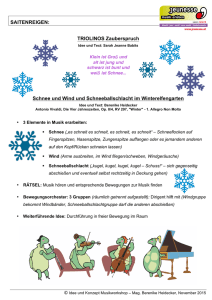
Zur Geometrie der n-dimensionalen Kugel
Text
Gradienten Strategie kontra Evolutionsstrategie
Für n >> 1
( n)
jgrad
d
n
1/n
Gradientenstrategie
(n)
jevo
1
d
2 n
1/ n
Evolutionsstrategie
Text
Der Dumme, der einfach losgeht,
kommt weiter als der Schlaue, der
sitzen bleibt und sich vor lauter
Nachdenken nicht entscheiden kann.
Motto des Evolutionsstrategen
10 klassische Optimierungsstrategien
1. Gauß-Seidel-Strategie
2. Strategie von Hooke und Jeeves
3.
4.
5.
6.
Rosenbrock-Strategie
Strategie von Davis, Swann und Campey (DSC)
Simplex-Strategie von Nelder/Mead
Complex-Strategie von Box
7. Powell-Strategie
8. Newton-Strategie
9. Strategie von Steward
10. Strategie von Davidon, Fletcher und Powell (DFP)
Aktuell: SQP-Verfahren
(Sequential Quadradic Approximation)
x3
x2
x1
Elementare Gradientenstrategie
x3
x2
x1
Extrapolierende Gradientenstrategie
x3
x2
x1
Gauß-Seidel- oder Koordinatenstrategie
x3
3
6
4
7
2
1
5
x2
x1
Simplex-Strategie von Nelder/Mead
Ende
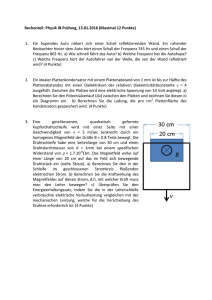
Eine ähnliche Aufgabe: Ein Würfel wird 4 mal hintereinander geworfen. Wie groß
ist die Wahrscheinlichkeit, dass mindestens eine Sechs fällt? – Aufgaben, in
denen das Wort „mindestens „ vorkommt, behandelt man am besten über die
Negation. Die Negation von „mindestens eine Sechs“ ich „keine Sechs“. Die
Wahrscheinlichkeit, mit einem Wurf keine Sechs zu werfen ist 5/6. Die
Wahrscheinlichkeit von „4 mal hintereinander keine Sechs„ ist (5/6)4. Dann ist die
Wahrscheinlichkeit, dass sich bei vier Würfen mindestens eine Sechs zeigt:
1 – (5/6)4 = 0,518
Eine sehr wichtige Aussage der Theorie: Zwei völlig verschiedene Verteilungen
der Mutationen (Gleichmäßig am Kugelrand und gleichmäßig im Kugelvolumen)
ergeben für viele Variable n das gleiche Ergebnis. Das heißt, es lohnt sich nicht,
über Vor- und Nachteile verschiedener Mutationsverteilungen zu sinnieren.
Das Diagramm zeigt, dass in einer hochdimensionalen Hyperkugel sich das
Volumen fast ausschließlich an der Oberfläche der Kugel konzentriert. Das
Innere einer Hyperkugel hat nur sehr wenig Volumen. Ein gleichverteilter Zufallspunkt wird sich deshalb mit großer Wahrscheinlichkeit immer am äußeren Rand
der Hyperkugel befinden.
Die Theorie zeigt: Eine planvoll durchdachte Handlungsweise zum Folgen des Gradientenweges (Gradientenstrategie) muss nicht notwendigerweise effektiver sein
als die Diffusion bergauf durch eine Reihe spontan ausgeführter kleiner Zufallsschritte. Man muss den Gesamtaufwand sehen. Die Gradientenstrategie benötigt n
Vorversuche (genau n+1), die zunächst noch keinen Fortschritt erbringen. Erst
nachdem die Informationen gesammelt wurden folgt der eigentliche Arbeitsschritt,
der nun allerdings den größtmöglichen Gewinn erbringt. Bei der Evolutionsstrategie
ist es umgekehrt. Die Chance für eine großen Gewinn ist bei einem Zufallsschritt
gering. Ein kleiner Gewinn tritt aber im Mittel jedes 2. Mal auf.
Fazit: Die vielen Hilfsoperationen bei einen ausgeklügelten Strategie können zu
einer größeren Verlangsamung des Fortschritts führen als die unvermeidlichen
Abweichungen eines Zufallsschrittes (im linearen Fall ist ja jeder 2. Schritt im Mittel
erfolgreich) von der optimalen Fortschrittsrichtung