Kapitel 5 Kapitel 5: Magnetischer Kreis 5.1 Transformatoren
Werbung

Kapitel 5:
5:
Magnetischer Kreis
5.1 Transformatoren
MK-1
Induktionsgesetz
Induktionsgesetz
Legt man N Leiterschleifen um den sich ändernden Fluss t so lautet das
Induktionsgesetz für die Klemmenspannung uq:
d )t
d<
uq
N
wobei = Nt der Spulenfluss ist.
dt
dt
Die induzierte Spannung ist proportional zur zeitlichen Änderung des
magnetischen Flusses, der die Leiterschleifen durchsetzt.
Die Richtung der induzierten Spannung ergibt sich aus der Lenzschen Regel:
Der durch die induzierte Spannung verursachte Strom ist immer so gerichtet, dass sein Magnetfeld
der Änderung des verursachenden Magnetfeldes entgegen wirkt.
Selbstinduktivität
Fliesst in einer Leiterschleife ein Strom I, so verursacht dieser einen magnetischen Fluss. Schaltet man
den St
de
Strom
o ab, vermindert
e
de t man
a gleichzeitig
g e c e t g den
de magnetischen
ag et sc e Fluss,
uss, b
bis
s zum
u Wert
e t Null.
u Es
se
entsteht
tste t
daher im Augenblick der Stromabschaltung eine hohe Änderungsgeschwindigkeit des Flusses. Durch
diese Flussänderung entsteht an den Klemmen der Leiterschleife eine induzierte Spannung. Diesen
Vorgang nennt man Selbstinduktion.
uq
N
d )t
dt
L
di
d
dt
Induktivität L:
L = N t /i
MK-2
wobei N die Anzahl Windungen der Spule ist.
Magnetische Kopplung
Von magnetischer Kopplung spricht man, wenn der magnetische Fluss einer Spule, oder ein Teil
davon, eine andere Spule durchsetzt.
Gegeninduktivität
Der Strom i1 in Spule 1 erzeugt den Fluss 10. Ein Teilfluss 12 fliesst durch Spule 2 und induziert eine
Spannung u2 in der Spule 2, in Abbildung a) dargestellt. Zur Beschreibung dieses Sachverhaltes wird der
Koppelfaktor k1 definiert:
Koppelfaktor k1 für Spule 2
)12
k1)10
Koppelfaktor k2 für Spule 1
) 21
k2 ) 20
e Gege
Gegeninduktivität
du t tät M12 u
und
d M21 wird
d wie
e
Die
folgt definiert:
M 21
N 2 )12
I1
M 12
N1) 21
I2
Magnetische Kopplung mit Feldverteilung bei Erregung , a) der Spule 1,
b) der Spule 2
Bei isentropen Material gilt:
M 21
M 12
M
p
g in der g
gekoppelten
pp
Spule
p
berechnet sich wie folgt:
g u2
Die induzierte Spannung
M
d
dt 1
u1
M
d
dt 2
MK-3
Magnetische Kopplung
MK-4
i
i
Magnetische Kopplung
Durch den Punkt wird
festgelegt, dass beim
Durchlaufen der Wicklungen von dem Punkt
aus der gemeinsame
K
Kern
i
im
gleichen
l i h
Si
Sinn
umkreist wird.
Die magnetische KopKop
plung von zwei Spulen
wird beispielsweise im
Transformator
ausge
ausgenutzt.
MK-5
Netzwerk mit induktiver Kopplung
Serienschaltung
a) Serien-, b) Gegenserienschaltung von zwei induktiv
gekoppelten Drosseln
Gleichgesinnte Serienschaltung:
Spannung:
U
( R1 jX 1 jZ M R2 jX 2 jZ M ) I
Za I
Gesamtinduktivität:
Lg L1 L2 2M
Gegensinnige Serienschaltung:
Spannung:
U ( R1 jX 1 jZ M R2 jX 2 jZ M ) I
Zb I
Gesamtinduktivität:
Lg L1 L2 2M
MK-6
Netzwerk mit induktiver Kopplung
Parallelschaltung
a) Parallel-,
b) Gegenparallelschaltung
von zwei induktiv
gekoppelten Drosseln
Gleichgesinnte Parallelschaltung
Spannungsgleichungen:
U ( R1 jZ L1 ) I 1 jZ M I 2
U
Teilströme:
R2 jZ L2 jZ M
I1
U
R1 jZ L1 R2 jZ L2 jZ M 2
Gesamtstrom:
R1 jZ L1 R2 jZ L2 j 2Z M
I I1 I 2
U
R1 jZ L1 R2 jZ L2 Z 2 M 2
Gesamtwiderstand:
2
2
U R1 jZ L1 R2 jZ L2 Z M
Z
I
R1 jZ L1 R2 jZ L2 j 2Z M
I2
( R2 jZ L2 ) I 2 jZ M I 1
R1 jZ L1 jZ M
R
1
jZ L1 R2 jZ L2 jZ M 2
U
Gegenseitige Parallelschaltung
Gesamtwiderstand:
2
2
U R1 jZ L1 R2 jZ L2 Z M
Z
I
R1 jZ L1 R2 jZ L2 j 2Z M
MK-7
Magnetische Kopplung
Beispiel: Es sind für folgende Schaltung die Maschengleichungen aufzustellen.
Es gelten natürlich weiterhin die Kirchhoffschen Gesetze.
L1
L4
L2
Zählpfeil für I2 in M12 entgegengesetzt zu I1
Spannungsgleichungen:
ª
§
1 ·º
¬
©
1
1. Teil: U q1 « R1 j ¨ Z L1 ¸ » I 1 jZ M 12 I 2
ZC
2. Teil:
3. Teil:
ª
jZ M 12 I 1 « R2 ¬
L3
¹¼
Wicklungssinn entgegengesetzt,
I2 und I3 jedoch gleich gerichtet
§
1 ·º
j ¨ Z L2 Z L4 ¸ » I 2 jZ M 23 I 3
Z C2 ¹ ¼
©
jZ M 23 I 2 ª¬ R3 j Z L3 Z L5 ¼º I 3
U q 3
MK-8
0
Magnetische Kopplung
Anwendungen der Gegeninduktivität: Æ Transformator
In der Energietechnik beim Leistungstransformator zum Herauf- oder
Heruntertransformieren von Wechselspannungen und –strömen.
strömen
Trenntransformator zur galvanischen Trennung von Netzteilen.
In der Nachrichtentechnik im Übertrager für die breitbandige Anpassung.
In der Messtechnik beim Wandler zum Verringern
g
von Messspannungen
p
g bzw.
Messströmen.
Schaltzeichen des Transformators
Eingangsseite des Transformators
Primäre Wicklung 1
Spannungsquelle angeschlossen
Energie wird zugeführt
Ausgangsseite des Transformators
Sekundäre Wicklung 2
Energie wird entnommen
MK-9
Idealer Transformator
Idealer Transformator
Anordnung: Zwei gleichgesinnte Spulen 1
und 2 mit den Windungszahlen N1 und N2 sind
um den Kern 3 gewickelt.
Eigenschaften der Spulen
Draht soll unendlich dünn sein
Die einzelnen Wicklungen sollen unendlich
dicht aufeinander liegen
Spulen weisen keine Kupferverluste auf
(R1 = 0 und R2 = 0)
Eigenschaften des Kerns
Der Kern soll eine Permeabilität = (magnetischer Widerstand Rm = 0) haben
Weist keine Ummagnetisierungsverluste auf
MK-10
Idealer Transformator mit Primärwicklung 1,
Sekundwicklung 2 und Kern 3
Spannungsübersetzung
Übersetzungsverhältnis
Beim Transformator ist der Kopplungsfaktor k näherungsweise 1.
Der Fluss durchsetzt die beiden gekoppelten Spulen gleich.
~
Das Induktionsgesetz lautet: uq = N dt/dt
Bei sinusförmiger Änderung der Spannung folgt:
uq
uˆq sin Zt ˆ cos Zt )
)t
Mit dem Induktionsgesetzt folgt:
uˆq sin Zt ˆ cos Zt / dt
Nd )
uˆq sin Zt ˆ sin Zt N Z)
uˆq
ˆ
N Z)
Der Effektivwert der Spannung in einer Wicklung: U q
uˆq
2
NZ ˆ
)
2
N 2S f ˆ
)
2
Effektivwerte der Sinusspannungen in den einzelnen Wicklungen: U1
ˆ
2S N1 f )
U2
ˆ
2S N 2 f )
g
der Sinusspannungen:
p
g
Übersetzungsverhältnis
ü
U1
U2
N1
N2
ˆ
2S Nf )
MK-11
Magnetisierungsstrom
Im Leerlauf
Im magnetischen Kreis fliesst der Fluss t mit
mittlerer magnetischer Weglänge lm, magnetischem Querschnitt Am und Permeabilität .
M
Magnetischer
ti h Wid
Widerstand:
t d Rm
lm / P Am Durchflutung: 4t
lm) t / P Am iP N
Rm )t
Magnetisierungsstrom: iP
~
lm)t
N P Am
Bei einem idealen Transformator ist die Permeabilität =. Daraus folgt
folgt, dass der
Magnetisierungsstrom i= 0 ist.
Im Leerlauf,
Leerlauf d.h.
d h wenn zwar die Sinusspannung u1 auf der Primärseite aber auf
der Sekundärseite kein Aussenwiderstand angeschlossen ist, nimmt der ideale
Transformator keinen Strom auf.
MK-12
Stromübersetzung
In der Belastung
Der Transformator wird durch den Widerstand Za
belastet Die Sekundärspannung u2 bringt den
belastet.
Sekundärstrom i2 zum fliessen und erzeugt die
Durchflutung
~
42t i2 N2
Aus dem Durchflutungsgleichgewicht im magnetischen Kern folgt: (analog zur
Maschenregel im elektrischen Stromkreis)
i1N1 i2 N2 iP N1
Beim idealen Transformator gilt: iP
0
Æ
i1N1 i2 N2 0
Somit gilt folgendes Stromübersetzungsverhältnis:
I1
I2
N2
<
N1
1
ü
Die Ströme verhalten sich genau umgekehrt wie die Spannungen.
Sekundärstrom und Sekundärspannung, aber auch der Verbraucherwiderstand treten am
Eingang mit anderen Werten in Erscheinung.
MK-13
Leistungsübertragung
Leistungen
Scheinleistung:
S1 U1 I1 U 2
N1 N 2
I2
N 2 N1
Wirkleistung:
P1
(im idealen Transformator treten keine Verluste auf)
P2
U2 I2
S2
g
Wird vorwiegend
g
in der Energieübertragung
g
g g verwendet, um
Leistungstransformatoren:
bei Fernübertragung die Ströme auf kleinere Werte herunter zu transformieren, wobei die
Übertragungsspannung entsprechend steigt. (z.B. 400kV) Dies reduziert die ohmschen
Verluste der Übertragungsleitung. Vor dem Verbraucher wird die Spannung wider auf
normale Niederspannung der Verbrauchernetze (z
(z.B.
B 400V) herab transformiert
transformiert.
Widerstände
Der Scheinwiderstand Z2 auf der Sekundärseite kann auf die Primärseite als scheinbar
wirksamer Eingangswiderstand Z´2transformiert werden.
Umgesetzte Scheinleistung: S 2
Z 2 I 22
Zugeführte Scheinleistung:
Z 2c I12
Eingangswiderstand: Z1
S1
Idealer Transformator mit
umgerechnetem komplexem
Sekundärwiderstand Z2
S2
Z 2c
MK-14
Widerstandstransformation und Ersatzschaltungen
Widerstände
Widerstände werden q
quadratisch mit dem Übersetzungsverhältnis
g
auf die
Primärseite transformiert:
Z 2c
2
ü2
Z 2c Z 2 I 2 / I1 Z 2ü 2
Z2
Ersatzschaltung
Notation: Sekundärgrössen welche auf die Primärseite umgerechnet sind,
werden mit einem ´ gekennzeichnet, und man darf den idealen Transformator
entfernen. Primärgrössen welche auf die Sekundärseite umgerechnet werden,
werden mit zwei ´´ gekennzeichnet. U c2 U 1
a) Vollständige Schaltung des idealen Transformators,
Transformators b) Ersatzschaltung mit auf die Primärseite umgerechnete
Kenngrössen, c) bzw. auf die Sekundärseite umgerechnete Grössen
MK-15
Widerstandstransformation
Beispiel: In der Sinusstromschaltung befindet sich ein Generator mit der Quellenspannung Uq = 100 V und
einem Innenwiderstand Ri = 10 sowie der Verbraucherwiderstand Ra = 1 k. Durch Anpassung mit einem
Transformator soll die grösstmögliche Leistung auf Ra übertragen werden. Übersetzungsverhältnis ü und
Verbraucherleistung Pa sind zu bestimmen.
Für die Leistungsanpassung gilt: Ri
Rac
ü 2 Ra
Hieraus lässt sich das Übersetzungsverhältnis ü des Transformators bestimmen:
ü
Ri / Ra
1:10
Am Verbraucher liegt dann die Spannung Uq/(2ü) an, so dass folgende Leistung umgesetzt wird:
Pa
U
q
/ 2ü Ra
2
250 W
MK-16
Idealisierter Lufttransformator
Lufttransformator
Es sollen jetzt die idealisierenden Vernachlässigungen schrittweise abgebaut und so zum
realen Transformator übergegangen werden
werden.
Idealisierter Lufttransformator
g = fallen, und berücksichtigen
g wir 0 der Luft.
Lassen wir die Voraussetzung
Der Magnetisierungsstrom ist nicht Null und berechnet sich
wie folgt: ˆ
ˆ
Im)
I mU1
i1
i1P
2
2
2P0 Am N1 2S f P0 Am N1
Mit Einsetzen des magnetischen Widerstandes Rm
und
dd
der IInduktivität
d kti ität
Ring-Lufttransformator
L1
lm / P0 Am N12 / Rm
erhält man für den Magnetisierungsstrom:
i1P
U1 Rm
Z N12
U1
Z L1
U1
X1
Der Magnetisierungsstrom ist ein rein induktiver Strom.
MK-17
Idealisierter Lufttransformator
Das Stromübersetzungsverhältnis wird durch den Magnetisierungsstrom gestört.
I1 / I 2 N 2 / N1 1/ ü
gilt nur noch, wenn I vernachlässigbar klein ist. Alle anderen Eigenschaften des
idealen Transformators und Umrechnungsgleichungen bleiben erhalten.
Im Ersatzschaltbild a) wird dem idealen Transformator
eine Induktivität L1 parallelgeschaltet welche den
Magnetisierungsstrom I1 führt.
Die Sekundärspannung U2 treibt den Sekundärstrom
I2. Der
D Ph
Phasenwinkel
i k l 2 wird
idd
durch
h Za bestimmt.
b ti
t
Der Sekundärstrom I2 auf die Primärseite transformiert
ergibt I c2 I 2 / ü .
Der Magnetisierungsstrom I1 eilt gegenüber U1 um
90° nach und liegt in Phase mit dem von ihm
erzeugten Fluss .
Daraus ergibt sich der Primärstrom I1
a) Ersatzschaltbild und b) Zeigerdiagramm des idealen Lufttransformators
I 1 I 1P I c2
MK-18
Lufttransformator mit Streuung
Lufttransformator mit Streuung
Man spricht von magnetischer Streuung wenn ein Teil des erzeugten magnetischen
Flusses nicht in erwünschter Weise mit der zu induzierten Spule verkettet ist
ist.
Im Leerlauf
Speisung
p
g der Primärseite, Sekundärseite offen
Primärinduktivität:
L1 N12 P0 A1 / lm
Primärer Leerlaufstrom:
U1
U1
I1l
Z L1 X 1l
Fluss durch Spule
p
2:
A2
) 2 )1
A1
Sekundäre Leerlaufspannung:
Ringtransformator
g
mit Streuung
g a)) Draufsicht,,
U1 A2
b) Querschnitt
U 2l
ü A1
Wobei A1 der Querschnitt der äusseren Spule, A2 der Querschnitt der inneren Spule und X1l
der primärer Leerlauf-Blindwiderstand ist.
MK-19
Ersatzschaltbild
Ersatzschaltung
Das Betrachten von Leerlauf und Kurzschluss reicht bei linearen Schaltungen aus, um eine
Ersatzschaltung anzugeben
anzugeben, die alle Belastungsfälle zu erreichen gestattet
gestattet.
Der idealisierte Lufttransformtor mit Streuung ist verlustlos. D.h. die Ersatzschaltung kann
nur Induktivitäten L enthalten.
Für das vorgegebene Übersetzungsverhältnis üN = N1/N2 erhält man die beiden völlig
gleichwertigen Ersatzschaltungen.
A1
A1 A2
X 1l X 1k
X 1l
X 1l
X 1k
1
X 1k
X 1l
1
A1 A2
A1
A2
A1
mit X1l: primärer Leerlauf-Blindwiderstand
X1k: primärer Kurzschluss-Blindwiderstand
A1, A2: Querschnitt der äusseren und inneren
Spule
Ersatzschaltung für idealen Lufttransformator mit Streuung mit idealem Transformator
a) auf Sekundärseite und b) auf Primärseite
MK-20
Transformatoren mit Eisenkern
Transformatoren mit Eisenkern
Da die Permeabilität von Eisen ist sehr viel grösser als die von Luft, kann man mit
einem Eisenkern den Magnetisierungsstrom ganz erheblich verkleinern
verkleinern, was dann
weiterhin die Verluste in den Wicklungen (Kupferverluste ) ebenfalls verringert. Das Eisen
muss jedoch ummagnetisiert werden, wodurch frequenzabhängige Eisenverluste
entstehen.
Transformatoren mit Eisenkern werden hauptsächlich in der Energietechnik zum Übertragen
von grossen Leistungen eingesetzt.
Leerlauf
Der leerlaufende Transformator an einer Sinusspannung verhält sich für Strom und
Leistungsaufnahme wie eine Drossel.
gekrümmten Magnetisierungskennlinie
g
g
den
Der Eisenkern verzerrt dann mit seiner g
Magnetisierungsstrom i und verursacht so Oberschwingungen des Leerlaufstromes IL.
Gleichzeitig muss das Eisen periodisch ummagnetisiert werden, so dass Hysterese- und
Wirbelstromverluste als Eisenverluste auftreten.
Leerlaufstrom:
IL
2
I Fe
I P2
IFe: Eisenverluststrom
I : Magnetisierungsstrom
Der Leerlaufstrom ist erheblich kleiner als beim Lufttransformator.
MK-21
Eisenverluste
Eisenverluste
Eisen wird bei einer Wechseldurchflutung warm, d.h. es entstehen Verluste. Diese
setzten sich aus den Hystereseverlusten und den Wirbelstromverlusten
zusammen.
Hystereverluste
H
t
l t
Befindet sich Eisen im magnetischen Feld wird ein Teil der zugeführten
elektrischen Energie beim Ummagnetisieren der Molekularmagnete irreversibel in
Wärmeenergie umgewandelt
umgewandelt. Dies wird Hysteresearbeit genannt.
genannt
Wirbelstromverluste
Ein magnetischer Wechselfluss erzeugt im Eisen nach dem Induktionsgesetz
Spannungen. Diese verursachen innerhalb des Eisens einen Strom. Dieser Strom
wird als Wirbelstrom bezeichnet.
MK-22
Hystereseverluste
Hystereseverluste
Hystereseschleife
y
Das Aufmagnetisieren des Eisens benötigt eine
grössere Feldstärke H als das Entmagnetisieren.
Beim Magnetisieren mit Strom i wird eine Spannung uq
wirksam: uq N dtd ) t
Energiezufuhr: dWt
idtN dtd ) t
iNd) t
Hysterese des Eisens
H t lAdBt
Flächeninhalt der Hystereseschleife ist ein Mass für die
aufzubringende Hysteresearbeit:
Bˆ
Wm
lA³ HdB
o
Hystereseverluste sind proportional mit der Frequenz f und proportional im Quadrat mit der
Aussteuerung B.
PHysterese f B 2
MK-23
Wirbelstromverluste
Wirbelstromverluste
Wird ein massiver metallischer Leiter von einem magnetischen Wechselfluss t durchsetzt,
entstehen nach uq = dt/dt ~ fB Spannungen,
Spannungen die Wirbelströme zur Folge haben
haben. Diese
verursachen Verluste, die proportional zum Quadrat der Stromstärke sind.
Wirbelstromverluste berechnen sich wie folgt:
VWi
ˆ 2J A / l
f 2)
Wirbelstromverluste sind proportional mit dem Quadrat der Frequenz f und im Quadrat mit
der Aussteuerung B
PWirbelstrom f 2 B 2
ˆ und den
Man kann die Wirbelstromverluste klein halten, indem man den Scheitelwert )
Querschnitt A verringert,
g
sowie den Stromweg
g l verlängert.
g
Zur Reduzierung
g der Ströme
wird das Eisen geblecht. Je höher die Frequenz des Wechselfusses ist, desto feiner wird
das Eisen geblecht.
Wirbelströme i in
einem massiven a)
und einem quer zur
Flussrichtung (+)
geblechten Leiter b)
MK-24
Dreiphasentransformatoren
Zur Transformierung eines dreiphasigen Spannungssystems
können
drei
Einphasentransformatoren
verwendet werden, die auf der Primär- und Sekundärseite in
Stern- oder Dreieck geschaltet sind (Transformatorbank).
Stern
Es ist nun nahe liegend die magnetischen Kreise der
Einphasen-Kerntransformatoren konstruktiv zu vereinen,
wegen der zeitlichen Phasenverschiebung der Spannungen
um je 120° gilt dann für die Summe der Kernflüsse in jedem
Zeitpunkt
) a (t ) ) b (t ) ) c (t )
0
Der Mittelschenkel führt damit keinen Fluss und kann
weggelassen werden.
MK-25
Dreiphasen--Kerntransformatoren
Dreiphasen
Werden die drei verbleibenden Schenkel des
Magnetkernes in eine Ebene geschoben erhält man
den konventionellen Dreiphasen-Kerntransformator.
Prinzipieller Verlauf des Feldes im magnetischen Kreis des
Dreiphasen-Kerntransformators für drei aufeinander folgende
charakteristische Zeitpunkte, die um jeweils T/12 auseinander liegen
(T kennzeichnet die Periode der Netzspannung)
MK-26
Niederspannungsnetz--Schutz des Menschen (1/2)
Niederspannungsnetz
Aus betrieblichen Gründen und um die
Potentialverhältnisse
gegenüber Erde zu definieren ist der Sternpunkt des Transformators des Niederspannungsnetzes geerdet , d.h. mit Metallteilen die die Verbindung Erde herstellen verbunden. Bei Berühren
eines spannungsführenden Teiles kann daher ein Körperstrom
fliessen der ggf. zu Herzkammerflimmern (ungeordnetes Zucken der
einzelnen Muskelfasern des Herzens) und damit zu einer SauerstoffUnterversorgung bzw. akuter Lebensgefahr führt.
Direktes und indirektes Berühren
Körperwiderstand
MK-27
Niederspannungsnetz--Schutz des Menschen (2/2)
Niederspannungsnetz
Die höchstzulässige Berührungsspannung
gegen
Erde
beträgt
50V
Wechselspannung (120V Gleichspannung)
und
ist
durch
eine
entsprechende
Schutzmassnahme sicher zu stellen (z.B.
Schutzisolierung,
Schutzkleinspannung,
Schutzerdung/Fehlerstrom-Schutzschaltung).
Schutzerdung
Für
ü Sc
Schutzerdung
ut e du g wird
d
der vor
de
o Berührungsspannung
e ü u gsspa u g zu
u
schützende Geräteteil (Gehäuse) über einen zusätzlichen Leiter
(Schutzleiter) mit Erde verbunden. Im Fehlerfall würde die
vorgeschaltete Sicherung erst bei einem hinreichend über dem
Nennstrom liegenden Fehlerstrom (>50A) rasch auslösen.
MK-28
Fehlerstrom--Schutzschalter
Fehlerstrom
Es wird daher ein Fehlerstrom-Schutzschalter eingesetzt,
der die mittels eines Summenstromwandlers die Summe
der in den Zuleitungen der geschützten Anlage fliessenden
Ströme überwacht. Tritt ein Köperschluss auf, fliesst ein
Strom über Erde, die Stromsumme ist damit ungleich Null
und der FI-Schalter trennt den fehlerhaften Verbraucher
allpolig vom Netz.
Fehlerstromschutzschaltung (links):
Sobald ein Fehlerstrom über den Schutzleiter fliesst,
schaltet der FI-Schalter ab.
Wenn ein Fehlerstrom fliesst,
fliesst entsteht ein
magnetischer Wechselfluss im Summenstromwandler. In der Auslösespule wird eine
Induktionsspannung erzeugt, die zur Auslösung
führt.
MK-29
Kapitel 5:
Magnetische Kreis
5.2 Gleichstrommaschine
MK-30
Elektrische Maschinen I
Elektrische Maschinen dienen der Umformung elektrischer Energie; Generatoren erzeugen elektrische Energie aus
mechanischer Energie, Motoren wandeln elektrische in mechanische Energie um.
Trotz aller Vielfalt im konstruktiven Detail, nach dem elektrische Maschinen ausgeführt sind, lässt sich ihre
Wirkungsweise stets durch Anwendung von nur drei physikalischen Grundgesetzen verstehen und beschreiben Induktionsgesetz, Durchflutungsgesetz und Kraftwirkungsgesetz.
D magnetische
Das
ti h Feld
F ld
Vektorfeld mit der Verteilung der örtlichen Kraftwirkung eines Magneten.
Eigenschaften des magnetischen Feldes:
- in sich geschlossene Feldlinien (quellenfreies Wirbelfeld). Dies gilt auch für das Magnetfeld eines Stabmagneten,
denn die in den Magnetpolen zunächst endenden Feldlinien können durch das Innere des Magneten fortgesetzt gedacht werden Die Intensität des magnetischen
Feldes wird durch die magnetische Flussdichdichte B beschrieben (B wird auch magnetische
Induktion genannt)
- das magnetische Feld, das von elektrischen
Strömen erregt wird, schliesst sich bevorzugt
über Eisenwege, wo solche zur Verfügung
stehen.
MK-31
Eigenschaften des magnetischen Feldes
Das magnetische Feld wird also durch das Eisen auf den Luftspalt konzentriert, während im übrigen Luftraum
vergleichsweise geringe Induktion herrscht; diese Feststellung erleichtert die quantitative Bestimmung von Feldern in
elektrischen Maschinen, da die geometrische Verteilung des Feldes von vornherein bekannt ist.
Die mathematische Beschreibung von Feldern stützt sich auf Begriffe der Strömungslehre (das Feldlinienbild könnte
die Strömung einer Flüssigkeit darstellen). In Anwendung dieser Analogie definieren wir den magnetischen Fluss
t
³ B dA
A
Für homogene Feldverteilung und Orthogonalität von B und dA, wie für elektrische Maschinen charakteristisch, gilt
t
BA
g Zwischen zwei Feldlinien wird jjeweils derselbe magnetische
g
Fluss g
geführt,, sodass die Feldlinien-dichte
Anmerkung:
ein Mass für die Flussdichte ist.
Ursache des magnetischen Feldes ist der elektrische Strom. Genauer: Die
Induktion B in einem betrachteten Punkt ist als Wirkung einer magnetischen
Erregung H in diesem Punkt zu deuten, es gilt
B
H
wobei = 0.r als Permeabilität bezeichnet wird.
Um eine definierte Induktion B in Eisen hervorzurufen bedarf es einer wesentlich
geringeren magnetischen Erregung H (r,E = 1000…10000,
0 = 4
4·10
10–7Vs/Am) als für die gleiche Induktion B in Luft erforderlich wäre (r,L
r L= 1)
MK-32
Ohmsches Gesetz des magnetischen Kreises
Bestimmung der magnetischen Erregung H bei Kenntnis der erregenden elektrischen Ströme
³ H ds ³ Sd A { ¦ I
A
In Verbindung mit der Beziehung B=H gibt das Durchflutungsgesetz
die Möglichkeit der Ermittlung der elektrischen Feldverteilung in einer
elektrischen Maschine bei gegebenen geometrischen Verhältnissen
und bekannter Stromverteilung.
Das ohmsche Gesetz des magnetischen Kreises lässt sich direkt aus dem Durchflutungsgesetz herleiten:
B
v³ H dl ¦ H l ¦ 4 N I
Es gilt also:
)
4
Rm
mit Rm
l
l
¦ A ¦ R
¦
¦V
m, l
PA
Elektrischer Kreis
Der magnetische Fluss ist hierbei äquivalent zum
elektrischen Strom I,
I die Reluktanz Rm äquivalent zur
Resistivität R, und die magnetische Durchflutung äquivalent zur elektrischen Spannung U.
Die Kirchhoff‘schen Gesetze gelten entsprechend auch
für magnetische Kreise:
Maschenregel:
m, 4 0 Knotenregel:
¦)
0
Der magnetische Widerstand des Eisens (μr gross) ist
gegenüber dem Widerstand in Luft i.A. vernachlässigbar. Der Rechnungsgang setzt voraus, dass
die geometrische Form der Feldverteilung bekannt ist.
Spannungsquelle: U
[V]
Strom:
[A]
I
Ohm. Widerstand: R
[]
Leitwert:
G
[S]
Teilspannung:
U = Rm·I
Magnetischer Kreis
[A]
Durchflutung:
Magnetischer
[Vs]
Fluss:
Magn. Widerstand: Rm [A/Vs]
Magn. Leitwert:
Teilspannung:
Vm = Rm·
[Vs/A]
MK-33
Durchflutungsgesetz
Beispiel: Induktivität mit Eisenkern und Luftspalt
Erregung des Eisenkernes durch den Wicklungsstrom I, die magnetische Induktion B ist auf den Eisenweg konzentriert, der magnetische Fluss ist in erster Näherung im Eisenkreis und im Luftspalt gleich gross.
Gehen wir davon aus dass uns der Fluss bekannt ist, folgen für die
magnetische Induktionen Bi in den einzelnen Abschnitten i mit den
Querschnittsflächen Ai
Bi
)
Ai
und damit für die magnetischen Erregungen
Hi
Bi
Pi
Aus dem Durchflutungsgesetz und unter den Annahmen
4Fe
4L
und
AFe
AL
und somit
BFe
BL
folgt nun
4 N I
B
B
2G l
P0
P0 Pr Fe
und somit
MK-34
B
N I P0
2G lFe / Pr
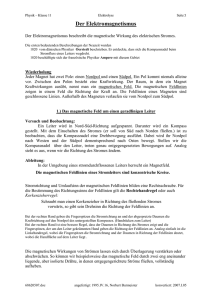
Flussverkettung und Induktionsgesetz
Induktionsgesetz
In einer geschlossenen Leiterschleife entsteht eine elektrische Spannung, sobald sich der mit der Leiterschleife
g
Fluss zeitlich ändert:
verkettete magnetische
uq
w
d )t
dt
d <t
dt
Für die Richtung der induzierten Spannung uq ist zu beachten dass ein durch Induktion hervorgerufener Strom stets
so fliesst
fliesst, dass sein Magnetfeld der induzierten Flussänderung entgegenwirkt
entgegenwirkt.
Die Änderung der Flussverkettung kann verschiedene Ursachen haben:
uq
w
§ w w w i w w x ·
w¨ t t t ¸
w i wt wx wt ¹
© wt
dt
dt
• Transformationsspannung
Feststehendes, aber zeitlich veränderliches Magnetfeld in ruhender Spule (z.B. Transformator)
• Selbstinduktionsspannung
Flussänderung durch den eigenen zeitlich variablen Spulenstrom (z.B. Induktivität)
• Bewegungsspannung
Relativbewegung v zwischen einem zeitlich konstanten Feld und der Spule (z.B. Gleichstrommaschine). Dabei
kann das Magnetfeld räumlich konstant sein oder nicht.
MK-35
Bewegungsspannung (1/2)
Bei rotierenden elektrischen Maschinen erfolgt der Induktionsvorgang meist dadurch, dass zwischen einem
Magnetfeld mit örtlich unterschiedlicher Flussdichte Bx (z.B. Sinusform) und der induzierten Spule eine Relativbewegung besteht (Bewegungsspannung). Die Flussverkettung ist aufgrund der örtlichen Feldänderung /x und der
R l ti
Relativgeschwindigkeit
h i di k it x/t
/ variabel:
i b l
uq
w
dx,t
dt
w
w wx
wx wt
Rotierende Leiterschleife innerhalb eines räumlich konstanten Magnetfelds
Eine Leiterschleife weise N Windungen auf und drehe sich im homogenen Magnetfeld mit der Winkelgeschwindigkeit .
Für den Fluss, der eine Windung durchsetzt gilt:
I
B AA
B A cos D
B A cos(Zt M )
Damit ist die in der Spule induzierte Spannung eine sinusförmige Wechselspannung mit der auch drehzahlabhängigen Amplitude Û:
uind
d\
d
dt
uind
Uˆ sin(Zt M )
N
dI
ddt
N B A Z sin((Zt M )
MK-36
Bewegungsspannung (2/2)
Lineare Bewegung einer Leiterschleife durch ein homogenes Magnetfeld
Ein Rechteckrahmen (l = 3cm, b = 2cm) wird mit der Geschwindigkeit v = 0.5m/s durch ein Magnetfeld bewegt. Das
g
Magnetfeld
g
wird von einem Magneten
g
mit quadratischen Polschuhen ((a = 4cm)) g
gebildet und hat die Flussdichte
homogene
B = 1.5T. Welcher Spannungsverlauf uind(t) tritt auf, wenn sich zur Zeit t = 0 der rechte Draht der Schleife gerade am linken
Rand des Magnetfeldes befindet?
Während des Eintauchens der Schleife ins
Feld
F
ld wächst
ä h t die
di durchflossene
d hfl
Flä h linear
Fläche
li
A l v t
und ebenso der Fluss:
I
Die induzierte Spannung ist wiederum eine Bewegungsspannung und hat einen rechteckförmigen Verlauf mit:
dI
dt
uind
B l v
B A
B l v t
22 5mV
22.5
Werden Polschuhe mit abwechselnd gleichen positiven und negativen Flussdichten aneinandergereiht und entspricht die
g
w)) der Grösse dieser Polschuhe,, so wird die induzierte Spannung
p
g zu:
die Grösse der Leiterschleife ((mit der Windungszahl
uq
2 w Bx l v
oder je Leiter
Bx l v
uq
Die in einem Leiter induzierte Spannung ist in jedem Augenblick der an der Leiterstelle vorhandenen Flussdichte proportional (Bedingung: B, l und v stehen aufeinander senkrecht): Jeder Leiterstab kann als Spannungsquelle aufgefasst
werden!
MK-37
Kraftwirkung (1/3)
Im magnetischen Feld elektrischer Maschinen wirken
• Kräfte auf stromdurchflossene Leiter und
• Kräfte auf Grenzflächen zwischen Gebieten mit verschiedener Permeabilität.
Kraftwirkung auf einen stromdurchflossenen Leiter im Magnetfeld
Ein Stab der Länge l der den Strom I führt erfährt die Kraft F:
In elektrischen Maschinen
bilden Feldrichtung und
stromdurchflossener Leiter
meistens einen rechten
Winkel und somit gilt:
F
JG
F
G G
I l uB
Tangentialkraft F auf einen stromdurchflossenen Leiterstab im Magnetfeld
G
l
I l B
MK-38
Kraftwirkung (2/3)
Kraftwirkung auf Grenzflächen zwischen Gebieten mit verschiedener Permeabilität
Eine magnetische Kraftwirkung tritt weiter an der Grenzfläche eines Stoffes auf, von dem ein magnetisches Feld ausgeht. Diese Flächenkraft ist als Längszug innerhalb des magnetischen Feldes aufzufassen; z.B. gilt für die
senkrecht zur Fläche A eines Magneten bei kleinem Luftspalt und näherungsweise homogenem Feld wirkende
Zugkraft
F
B2
A
2 P0
wobei:
1
2 P0
39.79 104
Am
N
| 40 2 2
V
Vs
T cm
Die Kraft ist so gerichtet, dass sie das Volumen des Stoffes mit der kleineren Permeabilität zu verkleinern sucht.
Bei einem Elektromagneten (siehe unten) ergibt sich also stets eine anziehende Kraft. Bei einer Verlagerung des
Läufers in einem Motor aus der geometrischen Achse bilden diese Kräfte als resultierende radiale Kraft den sog.
magnetischen Zug, der versucht, das Läuferblechpaket an den Ständer heranzuziehen.
a)
b)
MK-39
Kraftwirkung (3/3)
Für den Fall eines stromdurchflossenen Leiters in einer Nut ergibt sich eine Überlagerung von äusserem
Luftspaltfeld und Eigenfeld des Leiters mit einer ungleichen Flussdichte in den benachbarten Zähnen und damit
ungleichen Zugkräften. Es lässt sich zeigen, dass deren Addition F1-F2 zusammen mit der kleinen Komponente FS die
di kt auff den
direkt
d
L it wirkt
Leiter
i kt genau die
di Kraft
K ft ergibt,
ibt die
di auff einen
i
d
denselben
lb
St
Strom
füh d
führenden
L it auff einer
Leiter
i
ungenuteten Läuferoberfläche angreifen würde.
Detailansicht (vergrössert): Kräfte
auf Zahnflanken und Leiter einer
stromdurchflossenen Läufernut
Das Drehmoment entsteht also im wesentlichen durch Kräfte die direkt an den Zahnflanken angreifen und nicht
durch den Druck der Leiterkräfte auf die Nutwandung.
Auch wenn die Leiterstäbe in den Nuten in einem fast feldfreien Bereich liegen, lässt sich das Drehmoment einer
Maschine mit Läuferdurchmesser d trotzdem über die Formel der Kraftwirkung auf einen stromdurchflossenen Leiter
bestimmen:
d n
M
Fi
mit
Fi I li B
2
¦
i 1
MK-40
Gleichstrommaschine
Die prinzipelle Wirkungsweise des Gleichstrommotors erklärt sich
aus der physikalischen Erscheinung der Kraftwirkung F = B·l·I auf
einen stromdurchflossenen Leiter im magnetischen Feld. Man
b öti t danach
benötigt
d
h ein
i Magnetfeld
M
tf ld der
d Flussdichte
Fl
di ht B im
i Luftspalt
L ft
lt der
d
Feldpole und darin drehbar angeordnete Leiter der Länge l die
einen Strom I führen.
Die Stromzufuhr muss dabei so erfolgen, dass stets alle
Leiter eines Polbereiches gleichsinnig durchflossen
sind, d.h. bei Wechsel des Polbereiches muss während
d
der
D h
Drehung
eine
i
U
Umschaltung
h lt
d
der
St
Stromrichtung
i ht
i
im
Ankerleiter erfolgen. Dies erreicht man mechanisch durch
den Stromwender (Kommutator); in den Ankerleitern
fliesst ein zeitlich etwa rechteckförmiger Strom.
Anschlüsse von Anfang und Ende einer aus mehreren Windungen
b t h d
be-stehenden
A k
Ankerwicklungs-Spule
i kl
S l
an zweii benachbarte
b
hb t
Kommutatorseg-mente (Schleifenwicklung)
MK-41
Gleichstrommaschine
Source: Wikipedia
MK-42
Luftspaltfeld
Erregerfeld im Luftspalt einer Gleichstrommaschine im Leerlauf
a)
Feldverlauf zwischen Hauptpol
und
dA
Anker
k
b)
Erregerkurve BLx = f(x) und
Definition des Polbedeckungsfaktors Feldverlauf im Luftspalt einer Gleichstrommaschine unter Last
MK-43
Drehmomentbildung
Für das Drehmoment der Gleichstrommaschine folgt mit dem Ankerstrom je Umfangseinheit, dem sog. Ankerstrombelag A
M
'x
dA
Bm l A
2
wobei
A
IS zA
dA S
Dabei fliesst in zA Leiterstäben jeweils der Stabstrom IS.
Die Addition dieses Momentes je Umfangseinheit über alle 2p Polteilungen (p ist die Polpaarzahl) der Breite p (2p·p
entspricht folglich dem Umfang) ergibt das gesamte innere Moment
Mi
M
2 p W p
'x
Mi
c IA )
d A p A Bm l W p
dA p A )
und somit allgemein
wobei c durch die Konstruktion der jeweiligen Maschine bestimmt wird; Mi ist als Wirkung des elektromag
elektromagnetischen Schubes an der Ankermantelfläche zu verstehen, das an der Welle auftretende Drehmoment unterscheidet sich von Mi um das Reibungsmoment.
Werden zur Konstruktion einer Maschine Eisen und Kupfer verwendet, so darf die Dauerstromdichte J im Leiter
2 und
max. 4-8
4 8 A/mm
A/
d die
di Sättigungsflussdichte
Sätti
fl
di ht BSat max. 1.5T
1
b t
betragen.
D it wird
Damit
i d das
d Dauermoment
D
t der
d Maschine
M
hi in
i
erster Näherung durch das Volumen bestimmt:
Mi
c IA )
c J ACu B AFe
MK-44
Induzierte Spannung
Rotiert ein Gleichstromanker im Ständerfeld mit Luftspalt-Flussdichte B, so wird in den Leiterstäben entlang des
Umfanges eine Spannung Uq = B·l·v induziert. Durch die Reihenschaltung der Spulen addieren sich deren Spannungen
Usp zwischen benachbarten KohleLinks:
bürsten Der Kommutator sorgt dafür,
bürsten.
dafür
Addition der
Spulenspannungen
dass stets der Maximalwert bzw. anUsp durch den
nähernd eine Gleichspannung an den
Stromwender
Ankerklemmen auftritt.
In jeder Windung der Ankerwicklung
wird die mittlere Spannung
U q,w
Bm A Z
Bm 2r l
Rechts:
Kohlebürsten und
Polteilung der
vierpoligen
Gleichstrommaschine
v
r
induziert. Für die Umfangsgeschwindigkeit des Ankers gilt mit der Drehzahl n:
U q,w
und damit
4 p p l Bm n
v Z r
dA S n
2 p W p n
4p)n
Für die innere Ankerspannung, d.h. für die Spannung zwischen benachbarten Bürsten gilt damit allgemein mit
=2·n
Uq
c ) Z
wobei c wieder die von der Drehmomentbildung bekannte Maschinenkonstante bezeichnet.
Die an einem Leiter bzw. in der gesamten Wicklung auftretende elektrische Leistung muss (ideal) gleich der
umgesetzten mechanischen Leistung sein. Dies wird wie folgt bestätigt:
Pi
Mi Z
c I A ) Z
I A U q
MK-45
Motor-- und Generatorbetrieb
Motor
Der Aufbau der Gleichstrommaschine gestattet ohne Änderungen einen Betrieb als Motor oder als Generator,
wobei sich die beiden Betriebsarten hinsichtlich der Richtung des Leistungsflusses unterscheiden.
g induzierte Spannung
p
g zwischen den Bürsten hat beim Generator die Funktion einer
Die in der Ankerwicklung
Quellenspannung, beim Motor wirkt sie als induzierte Spannung der von aussen angelegten Gleichspannung
entgegen. Welchen Betriebszustand die Maschine annimmt richtet sich nach dem Verhältnis von UA/Uq.
Für UA > Uq ist der Ankerstrom p
positiv, die
Maschine läuft im Motorbetrieb.
IA
U A Uq
RA
Dagegen ändert für UA < Uq der Ankerstrom
seine Richtung, es wird mechanische
Leistung aufgenommen und elektrische
abgegeben.
b
b
Ersatzschaltung zur Bestimmung des stationären
Betriebsverhaltens (Strom IA eingezeichnet für Motorbetrieb)
MK-46
Wirkungsgrad der Gleichstrommaschine
Die jeweils verfügbare Leistung unterscheidet sich von der inneren Leistung durch Reibungsverluste, Eisenverluste,
Verluste im Ankerwiderstand und ggf. Erregungsverluste. Entsprechend ist das bei Motorbetrieb abgegebene Drehmoment kleiner als das innere Moment.
Die Verluste widerspiegeln sich im Wirkungsgrad ,
welcher durch das Verhältnis von aufgenommener und
abgegebener Leistung definiert ist:
K
Pab
Pauf
Pauf ¦ PV
Pauf
1
¦P
V
Pauf
Mittlerer Wirkungsgrad von Gleichstrommaschinen:
Leistungsflussdiagramm
Am Leistungsschild eines Motors ist die im Nennpunkt an
der Welle abgegebene mechanische Leistung angegeben.
MK-47
Konstruktion und Ausführungsformen von GM (1/2)
Gleichstrommaschinen höherer Leistung weisen aus Gründen der Platzersparnis eine rechteckige Form auf.
MK-48
Konstruktion und Ausführungsformen von GM (2/2)
Bei Maschinen mit kleineren Leistungen werden anstelle der mit Gleichstrom
erregten Hauptpole Dauermagnete zur Erregung eingesetzt.
Der Kommutator kann durch Leistungstransistoren ersetzt werden (bürstenlose Gleichstrommaschine), wobei die Umschaltung
der Wicklungsanordnung aufgrund der einfacheren Realisierbarkeit
im feststehenden Teil (Stator) erfolgt. Der Betriebsstrom I wird
zyklisch um jeweils 90° weiter-geschaltet, es entsteht ein umlaufendes Ständerfeld dem der permanenterregte Läufer folgt. Vorteile sind
vor allem Wartungsfreiheit, eine hohe Lebensdauer und hohe
Maximaldrehzahl bis 100‘000U/min.
MK-49
Drehzahl/Drehmoment--Kennlinien der GM
Drehzahl/Drehmoment
Für die Abhängigkeit der Drehzahl vom Ankerstrom folgt bei einer
fremderregten Gleichstrommaschine mit
2 n
U A RA I A
c c
und
IA
M
c)
Uq
c ) Z
Uq
U A RA I A
unter Vernachlässigung der Verluste die Beziehung:
n
·
RA
1 § UA
M ¸
¨
2
2 © c (c )
¹
Eine Änderung
g der Ankerspannung
p
g UA oder des Hauptpolfeldes
pp
über
den Erregerstrom beeinflusst die Leerlaufdrehzahl n0. (Im Leerlauf
fliesst kein (Anker)Strom im Rotor).
n0
1 § UA ·
2S ¨© c ) ¸¹
Ankerstellbereich:
U A d U AN bei Nennfeld N für Drehzahlen
0 d n d nN
Feldschwächbereich:
Ankernennspannung UAN bei ) d ) N für Drehzahlen n N d n d nmax
(nmax = 2 .. 4·nN)
MK-50
Drehzahlkennlinienfeld eines fremderregten Motors im
Anker- und Feldstellbereich. Treibt ein Motor eine
Arbeits maschine mit dem Momentenbedarf MW = f(n)
Arbeits-maschine
f( )
an, so ergibt sich die Betriebsdrehzahl aus dem
Schnittpunkt der Drehzahl-Drehmomentkurven,
Universalmotor
Abschliessend sei erwähnt, dass durch eine Reihenschaltung von Erreger und Ankerwicklung ein Motor für
Betrieb an Gleich- und Wechselspannung realisiert werden kann (Universalmotor). Bei Wechselstromspeisung
ändern die drehmomentbildenden Grössen - das von der Ständerwicklung erregte Magnetfeld und der Läuferstrom
gleichzeitig
l i h iti ihre
ih Richtung
Ri ht
, das
d Drehmoment
D h
t behält
b hält somitit stets
t t das
d gleiche
l i h Vorzeichen.
V
i h
~ IA
Prinzipschaltbild des Kommutatorreihenschlussmotors
M
c..I A ~ I A2
n0
1 § UA ·
.
2 ¨© c. ¸¹
Drehmomentverlauf beim Universalmotor
MK-51
Kapitel 5:
Magnetische Kreis
5.3 Drehfeldbildung & Drehstrommotoren
MK-52
3-phasige Systeme - Energieübertragung
Bei der Übertragung und Verteilung elektrischer Energie werden verschiedenste Spannungsniveaus eingesetzt um ein
technisch wirtschaftliches Optimum zu erzielen. Für Endverbraucher liegen in Europa typisch 230/400V Niederspannung,
in kleineren Verteilnetzen und als Generatorspannungen 10...20kV und in Hoch- und Höchstspannungsnetzen 220…750kV
vor. Die unterschiedlichen Spannungsniveaus werden dabei mit Hilfe Transformatoren erzeugt, welche die verschiedenen
Netzteile hinsichtlich Energieübertragung koppeln und eine Potentialtrennung vornehmen.
Die Übetragung erfolgt dabei hauptsächlich mit 3-phasigen Systemen, um eine konstante und effiziente
Leistungsübertragung zu gewährleisten. Die Netzfrequenz beträgt in Europa üblicherweise 50Hz – in anderen Ländern
sind auch 60Hz Systeme gebräuchlich. Verbraucher kleinerer Leistung, wie diese z.B. im Haushalt anzutreffen sind,
werden dabei zwischen Phase und Nullleiter angeschlossen, so dass an diesen eine Spannung von 230V( 400V/3)
anliegt. Die Verbraucher werden dabei auf die 3 Phasen aufgeteilt, um eine gleichmässige Lastverteilung zu erhalten.
MK-53
Drehstromsysteme
Drei sinusförmige
Wechselgrössen ga, gb und gc bilden ein symmetrisches Dreiphasensystem positiver
Phasenfolge, wenn Sie gleiche Frequenz und Amplitude aufweisen und um jeweils 120° (2/3) gegeneinander
phasenverschoben aufeinander folgen
ga
gˆ cos(Zt M g )
gb
gˆ cos(Zt M g 2S / 3)
gb
gˆ cos(Zt M g 4S / 3)
gˆ cos(Zt M g 2S / 3)
Zeigerdarstellung der drei Wechselgrössen
ga, gb, gc, die ein symmetrisches Dreiphasensystem positiver Phasenfolge bilden
Wenn die Ströme und Spannungen dreier Zweipole je ein symmetrisches Dreiphasensystem bilden können
ihre äusseren Zuleitungen leitungssparend in Stern oder Dreieck zusammengeschaltet werden. Die
Einzelzweipole werden als Stränge bezeichnet; handelt es sich um Wicklungen spricht man von Wicklungssträngen.
Die Sternschaltung entsteht aus der Überlegung dass keine Störung eintritt wenn die Einzelstromkreise eine
gemeinsame Rückleitung (Hinleitung) benutzen.
Im Sternpunktleiter (Neutralleiter) fliesst die Stromsumme i N
MK-54
i a ib i c
Leistung im Dreiphasensystem
Die in einem Dreiphasensystem zufliessende Leistung erhält man als Summe der über die Zuleitungen fliessenden
Leistungen
u L1i L1 u L 2 i L 2 u L 3i L 3
p
oder als Summe der Strangleistungen
p ua ia ubib ucic
Mit den Augenblickswerten der StrömeStröme und Spannung folgt
p Uˆ cos Zt Iˆ cos t I Uˆ cos t 2 / 3Iˆ cos t 2 / 3 I Uˆ cos t 2 / 3Iˆ cos t 2 / 3 I Die Augenblicksleistung in einem
1-Phasensystem pulsiert
und daraus der allgemein, d.h. unabhängig von zeitlich konstante Wert der Momentanleistung
p (t )
P
3UI cos I
3U LL I cos I
3U str I str cos I
Die Augenblicksleistung in einem
3-Phasensystem ist konstant
( ist der für alle Stränge gleiche Phasenwinkel
zwischen Strom- und Spannung)
MK-55
Grundzüge der Drehfeldtheorie
Ein besonderes Merkmal der Gleichstrommaschinen war das räumlich feststehende Luftspaltfeld welches in den
rotierenden Ankerleitern zu einer Spannungsinduktion bzw. bei Vorliegen eines Ankerstrombelages zu einer
Drehmomentbildung geführt hat.
Drehstrom-Asynchronmaschinen
Asynchronmaschinen und Drehstrom
DrehstromEine weitere grosse Gruppe von Maschinen, insbesondere Drehstrom
Synchronmaschinen, sind dadurch gekennzeichnet, dass die das Verhalten bestimmende Induktionsverteilung im
Luftspalt eine fortschreitende Welle darstellt. Entsprechend werden diese Maschinen auch als Drehfeldmaschinen
bezeichnet. Die Gründzüge der Drehfeldtheorie werden im Weiteren vor einer detaillierten Behandlung der
Maschinenarten zusammengefasst.
Spannungsinduzierung durch ein Läufergleichfeld
Zur Erzeugung eines dreiphasigen Spannungssystems mit drei gegeneinander um 120° elektrisch verschobenen
Strangspannungen werden im Ständer drei gleiche räumlich versetzte Wicklungen angeordnet. Durch den Läufer wird
ein Gleichfeld erzeugt,
erzeugt das eine sinusförmige Induktionsverteilung längs des Luftspaltes aufbaut.
aufbaut
Dreht sich der Läufer mit
konstanter Geschwindigkeit,
so induziert sein Feld in den
einzelnen Spulen zeitlich
sinusförmige Spannungen
die sich innerhalb jedes Wicklungsstranges zu einem resultierenden Wert addieren.
Die Berechnung des Induktionsvorganges kann über
die Beziehung uq = B.l.v erfolgen.
MK-56
Erzeugung eines Ständerfeldes
Felderregerkurve eines Stranges
Wird ein Strang einer Drehstromwicklung stromdurchflossen, so baut die entsprechende Durchflutung ein magnetisches Feld auf.
4 N I
B
B
2G l
P0
P0 Pr Fe
4 NI
Magnetfeld eines
Ständerwicklungsstranges p=1, q=4
Leiter pro Strang
Felderregerkurve eines Wicklungsstranges
Die Verteilung der Induktion entlang des Luftspaltes kann
über den räumlichen Verlauf der für den Luftspalt zur
Verfügung stehenden magnetische Spannung
Vstr
berechnet werden (unter Annahme unendlich hoher
Permeabilität des Eisens ist der Magnetisierungsbedarf des
Eisens
vernachlässigbar).
Unter
Anwendung
des
Durchflutungssatzes gilt dann
2HM
4 Str
o
VStr
HM
1
4 Str
2
Man bezeichnet VStr = f(x) als Felderregerkurve und
konzentriert zu ihrer Bestimmung den Strom jeder Nut
punktförmig in deren Mitte. Die magnetische Spannung
ändert sich dann innerhalb der 60° elektrisch-Zone eines
Stranges treppenförmig,
treppenförmig da im Abstand einer Nutteilung
jeweils die Amperewindungen einer Nut hinzukommen.
V n1
4
Vn
S
Ermittlung der Durchflutungsverteilung eines Wicklungsstranges
mit zwei hintereinander geschalteten Spulen je Polpaar
MK-57
Felderregerkurve dreier Stränge (1/2)
Strangfeld
Für die Grundwelle der Felderregerkurve folgt für eine kosinusförmigen Strangstrom
§ x
V1x ,t V Str1sin¨ S
© WP
·
¸cosZt
¹
§ x
B1x ,t B1sin ¨ S
© WP
·
¸cosZt
¹
i1
2I cos(Zt )
Die Induktionsverteilung zeigt wie die Felderregerkurve treppenförmigen Verlauf (V = H. = B/.) und pulsiert
ebenfalls mit Netzfrequenz f = /(2). Entsprechend gilt für die Grundwelle
Drehfeld-Erregerkurve
Wird eine dreiphasige Wicklung an ein symmetrisches Drehstromsystem angeschlossen, so bilden die drei Stränge
entsprechend ihrer räumlichen Lage und der zeitlichen Phase der Ströme je eine Felderregerkurve aus.
Bestimmt man die resultierende Felderregerkurve der gesamten Drehstromwicklung durch Überlagerung der
Grundwellen der Stränge (räumlicher Versatz der Strangwicklungen um 2/3 und Phasenverschiebung der Strangströme
um 2/3)
x
Strang U:
VU VStr sin(S
Strang
g V:
VV VStr sin(S
Strang W:
VW
erhält man aus
)cos(Zt )
WP
x
2S
2S
)cos(Zt )
WP 3
3
x 4S
4S
VStr sin(S
)cos(Zt )
WP 3
3
V 1x ,t VU VV VW
MK-58
Felderregerkurve dreier Stränge (2/2)
(Fortsetzung)
nach Anwenden der Additionstheoreme
und Zusammenfassen einen sinusförmigen Gesamtverlauf mit konstanter
Amplitude
V1
§ x
·
3
VStr sin ¨ S
Zt ¸
2
© WP
¹
Die Lage des Maximums der räumlich
sinusförmigen Kurve zur Achse eines
Wicklungsstranges stimmt stets mit der
Lage des entsprechenden Strangstromes im Zeigerdiagramm überein.
In der Zeitspanne (t) = /6 bewegt
sich das Maximum um den Umfangsteil
x = P/6 weiter,
weiter Innerhalb einer Periode
des Ständerstromes der Frequenz f wird
damit der Weg 2P zurückgelegt. Bei p
Polpaaren am Umfang ist damit die
Drehzahl der Drehdurchflutung
Addition der Felderregerkurven (Grundwellen) der 3 Stränge
n
f
p
MK-59
Drehfeld
Entsprechend der Proportionalität zwischen dem
Verlauf der Felderregerkurve und der Flussdichte
gelten die vorgehenden Überlegungen auch für
die resultierende Induktionsverteilung. Die Drehstromwicklung erzeugt somit über die GrundG
wellen der drei Strangdurchflutungen ein räumlich
sinusförmig verteiltes Luftspaltfeld, das wie ein
Gleichfeld eines Läufers rotiert und daher als
Drehfeld bezeichnet wird
Bx ,t B1sin(S
x
WP
Zt )
Wichtig
g ist nochmals festzuhalten, dass die
Entstehung eines Ständerdrehfeldes konstanter
Amplitude an zwei Voraussetzungen gebunden
ist
1) die drei Stränge der Drehstromwicklung
müssen untereinander
i
d
gleich
l i h und
d in
i ihren
ih
Anfängen um 2P/3 versetzt sein;
2) die komplexen Zeiger der drei Wicklungsströme müssen einen symmetrischen
Stern bilden,
bilden d.h.
d h die Ströme müssen
gleiche Amplitude aufweisen und 120°
Phasenverschiebung zeigen.
Sind diese Voraussetzungen nicht erfüllt, entsteht
ein elliptisches Drehfeld mit schwankender
Amplitude und Winkelgeschwindigkeit.
Zur Erzeugung des Drehfeldes durch eine zweipolige, dreisträngige Ständerwicklung mit
einer Spule je Strang:
a)) Anordnung
A d
miti positiven
ii
Z
Zählrichtungen
hl i h
d
der S
Ströme; b) zeitlicher
i li h V
Verlauf
l fd
der S
Strangströme
c) prinzipieller Verlauf des Feldes für die Zeitpunkte wt1, wt1 + 2p/12 und wt1 + 2(2p/12)
MK-60
Synchronmaschine - Einsatzbereiche
S
Synchronmaschinen
h
hi
(SM) sind
i d für
fü die
di Erzeugung
E
elektrischer
l kt i h Energie
E
i von grundlegender
dl
d Bedeutung
B d t
und
d werden
d
hierbei entweder von Dampf- oder Wasserturbinen angetrieben. (Windturbinen weisen noch einen relativ geringen Anteil
an der Deckung des Energiebedarfes auf.) In diesem Zusammenhang spricht man von Turbo- oder
Wasserkraftgeneratoren, wobei sich die Maschinen wegen der unterschiedlichen Drehzahlbereiche beider Anwendungen
in der Läuferkonstruktion wesentlich unterscheiden. Die grössten ausgeführten Generatoren weisen Leistungen bis
1500MW bei über 20kV Nennspannung auf.
Als Antrieb besitzt die SM eine geringere Bedeutung als der kostengünstigere
Asynchronmotor, wird jedoch ebenfalls in Verbindung mit leistungselektronischen
Umrichtern als drehzahlvariabler Antrieb bis zu hohen Leistungen (MW) eingesetzt.
Beispiele sind Hochofengebläse,
Hochofengebläse Antriebe für Zementmühlen,
Zementmühlen Förderanlagen und
Walzgerüste. Darüber hinaus hat der Synchronmotor im Leistungsbereich bis zu
einigen kW Anwendungen als Servoantrieb (Positionieraufgaben) erobert. Durch
Dauermagneterregung im Läufer erhält man hier Antriebe mit einer höheren Leistung
als baugrössengleiche Käfigläufermotoren (ASM), die über Pulsumrichter drehzahlWi kl
Wicklungskopf
k f iim Lä
Läufer
f einer
i
geregelt werden. Weiters wird der Synchronmotor im Bereich kleiner Leistung in hoher
zweipoligen Vollpolmaschine
Stückzahl z.B. für Uhren in der Feinwerktechnik und für Gruppenantriebe in der Textilund Kunstfaserindustrie eingesetzt.
Ausschnitt aus der Stirnansicht des elektromagnetisch
aktiven Teils einer hochpoligen Schenkelpolmaschine in
I
Innenpolausführung.
l
f h
D Ständer
Der
S d trägt eine
i
d i
dreisträngige
i
Einschichtwicklung mit q=2 Spulen je Polpaar und Strang
Läuferquerschnitt zweipoliger Vollpolmaschinen
ohne Nuten im unbewickelten Gebiet
MK-61
Aufbau
Der grundsätzliche
D
d ät li h Aufbau
A fb
d
der
S
Synchronmaschine
h
hi
wurde
d bereits
b it in
i Verbindung
V bi d
mitit den
d
Üb l
Überlegungen
zur
Spannungsinduktion in einer Drehstromwicklung durch ein rotierendes Läufergleichfeld angegeben. Der
Erregerwicklung des Läufers wird i. A. über zwei auf der Welle sitzende Schleifringe Gleichstrom zugeführt. Im
Ständerblechpaket ist eine Drehstromwicklung untergebracht.
Bei Wasserkraftgeneratoren
g
((Drehzahlen typisch
yp
im Bereich n = 93.75 …750U/min,, Läuferdurchmesser zwischen 5m und
15m) wird der Läufer mit Einzelpolen ausgeführt, welche die Schenkel des magnetischen Kreises bilden. Man spricht
daher von einem Schenkelpolläufer; die erforderliche Polpaarzahl folgt aus der Beziehung
f = n.p
mit f = 50Hz als der Frequenz des Energieversorgungsnetzes
(n = 750U/min p = 4,
4 n = 93.75U/min
93 75U/min p = 32).
32)
Prinzipieller Aufbau
Permanenterregter
Läufer (8-polig)
Da für die optimale Ausnutzung einer Dampfturbine eine hohe
Drehzahl wünschenswert ist, werden Turbogeneratoren zur
Versorgung des 50Hz-Netzes als zwei- oder vierpolige Maschinen
(p = 1,2) mit einer Drehzahl von n = 3000U/min oder 1500U/min
gebaut. Um die bei diesen Drehzahlen an der Erregerwicklung
auftretenden
Fliehkräfte
auffangen
zu
können
(Radialbeschleunigungen von mehreren 1000g !), wird diese in die
Nuten eines Walzenläufers eingelegt (Vollpolläufer).
(Vollpolläufer)
Wirkungsweise
Für die folgenden Überlegungen sei die SM mit einer zweipoligen Drehstromwicklung im Ständer ausgestattet.
Legen wir nun an die drei Stränge der Wicklung drei sinusförmige, gegeneinander um 120
120° phasenverschobene
Wechselspannungen, werden die Wicklungen drei Ströme aufnehmen, die ihrerseits um 120° phasenverschoben sind.
Entsprechend der räumlichen Versetzung der Wicklungsstränge um 120° wird damit ein Drehfeld erregt, dessen Stärke
dadurch bestimmt ist, dass die von ihm in den Wicklungen induzierten Spannungen (Selbstinduktion) den aussen
anliegenden Spannungen gerade das Gleichgewicht halten müssen. Die Rotationsgeschwindigkeit des Feldes ist durch
die Frequenz der anliegenden Spannung bestimmt und wird als synchrone Geschwindigkeit bezeichnet.
bezeichnet
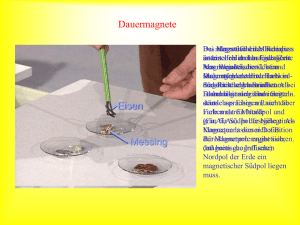
MK-62
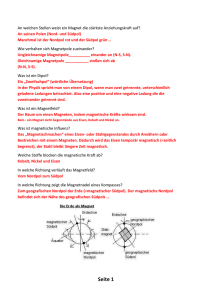
Wirkungsweise
Ausrichtung eines frei drehbaren Stabmagneten in
die Achse des vom Stator her eingeprägten
magnetischen Feldes
Zurückbleiben des Magneten hinter dem Statordrehfeld
unter der Wirkung einer mechanischen Abbremsung
Bringen wir nun einen Stabmagnet in die Bohrung dieser Maschine, hat dieser die Tendenz sich in Richtung des aussen
auf ihn wirkenden Magnetfeldes zu stellen. Denken wir uns das Drehfeld für einen Moment festgehalten, wird sich der
Stabmagnet daher in Feldrichtung stellen und bei Weiterlaufen des Feldes im Bestreben die Ausrichtung beizubehalten mit
rotieren, d.h. synchrone Drehgeschwindigkeit annehmen.
Wir haben damit das Wesen der Synchronmaschine bereits erkannt und überlegen in einem nächsten Schritt die Reaktion
auf den Versuch den Stabmagneten abzubremsen. Der Stabmagnet wird unter Einfluss des bremsenden Momentes etwas
hinter der angestrebten Lage zurückbleiben, dabei jedoch nach wie vor die synchrone Geschwindigkeit beibehalten. Bei
Belastung ändert sich also lediglich die Winkellage des Rotors relativ zum Drehfeld, nicht aber die Drehzahl als
solche.
Bremsen wir den Stabmagneten so, dass wir eine Verlangsamung der Drehzahl erzwingen, wird der Stabmagnet in
Konsequenz seine Lage relativ zum Drehfeld laufend ändern, sodass die elektromagnetische Kraftwirkung ihn abwechselnd
nach vorne zieht und dann wieder zurück. Im Mittel wird also das elektromagnetisch entstehende Drehmoment bei
nicht mehr synchronem (also asynchronem) Lauf Null sein. Das Auftreten dieses Betriebsfalles, d.h. des Abreissens der
Bindung zwischen rotierendem magnetischem Feld und mechanischer Bewegung des Rotors bezeichnet man als Kippen
oder Aussertrittfallen der Synchronmaschine.
Wir werden im weiteren die qualitativ erkannten Eigenschaften der SM mathematisch formulieren und so zu einer
quantitativen Erfassung des Zusammenhanges zwischen Spannungen, Strömen und Drehmoment kommen. Im Sinne der
Kürze bleiben unsere Überlegungen dabei auf die Vollpolmaschine beschränkt.
MK-63
Betriebsarten der Synchronmaschine
Generatorbetrieb. Wird der SM durch eine an die Läuferwelle gekuppelte Turbine ein Antriebsmoment zugeführt, so
will die Maschine ihre Drehzahl steigern. Sowie jedoch durch eine geringfügige Beschleunigung die Läufer- und damit die
Erregerstromachse aus ihrer Leerlaufstellung abweicht, entsteht zwischen Up und der Klemmenspannung
(Netzspannung) U1 der so genannte Polradwinkel . Es bildet sich die Differenzspannung U, die einen ihr um 90°
nacheilenden Ständerstrom I1 hervorruft.
hervorruft Der Strom I1 ist fast ein reiner Generatorwirkstrom,
Generatorwirkstrom d.h.
d h die SM gibt elektrische
Energie an das Netz ab. Der Polradwinkel stellt sich so ein, dass ein Gleichgewicht zwischen der zugeführten
mechanischen Wellenleistung und der abgegebenen Netzleistung besteht. Die synchrone Drehzahl bleibt erhalten(!), im
Unterschied zum Leerlauf werden nur der Zeiger Up bzw. die Läuferachse um den Winkel in Drehrichtung verschoben.
Motorbetrieb. Wird die leer laufende Synchronmaschine an der Welle belastet, so will der Läufer seine Drehzahl
verringern. Sobald jedoch das Polrad und damit die Polradspannung Up hinter der Spannung U1 zurückbleibt, wird
infolge der Spannung U wieder ein Ständerstrom fliessen. Dieser
Strom I1 ist näherungsweise in Phase mit U1, d.h. die Maschine nimmt
elektrische Leistung aus dem Netz auf und entwickelt daher ein
Motormoment, das dem Belastungsmoment das Gleichgewicht hält.
U1 U p
I1
Auch hier bleibt die synchrone Drehzahl erhalten, es entsteht nur eine
jX d
Winkelabweichung < 0 der Läuferachse.
Die elastische Kupplung des Läufers an den Zeiger der Netz
Netzspannung lässt sich durch eine Federverbindung zwischen den Zeigern
U1 und Up veranschaulichen. U1 rotiert unabhängig vom Verhalten der
Maschine mit der durch das Netz und die Polpaarzahl vorgegebenen
Drehzahl. Der Zeiger Up bleibt je nach der eingestellten Last mehr oder
weniger zurück,
zurück sodass die dem Motormoment entsprechende
Federkraft der Belastung das Gleichgewicht halten kann. Beide Zeiger
laufen bis auf die lastabhängige Winkeldifferenz synchron.
MK-64
G
Vereinfachtes
Ersatzschaltbild
Federverbindung zur Darstellung
der elastischen Kupplung zwischen
Ständerdrehfeld und Polrad
Drehmoment
D h
Drehmoment.
t Das
D von der
d Maschine
M
hi entwickelte
t i k lt Drehmoment
D h
t ist
i t über
üb die
di aus dem
d
N t aufgenommene
Netz
f
( d an
(oder
das Netz abgegebene Leistung) und die Synchrondrehzahl einfach berechenbar (P = M.
).
Aus der Stromortskurve folgt für die Wirkkomponente des Ständerstromes
I1 cos I1
Up
Xd
sin G
wobei das negative Vorzeichen eingeführt wird um bei negativem Polradwinkel ein positive Leistung (ein
positives Moment) zu erhalten. Für die Ständerwirkleistung folgt dann
P1
3U1 I1 cos I1
M
P1
2Sn1
und mit
3U1
Up
Xd
sin G
schliesslich für das der Wirkleistung zugeordnete Drehmoment
M
3.U 1 U p
.
. sin G
2Sn1 X d
Das Drehmoment der SM verläuft somit in Abhängigkeit
des Polradwinkels sinusförmig. Für > 0° eilt der Läufer
vor, es besteht Generatorbetrieb, bzw. tritt ein
negatives (dem Antriebsmoment entgegenwirkendes)
Moment der Maschine auf. Bei K = 90° wird das
Kippmoment erreicht. Das Kippmoment begrenzt die
kurzzeitige Überlastungsfähigkeit und lässt sich, wie der
Stromortskurve zu entnehmen durch verstärkte
Erregung (Erhöhung der ideellen Polradspannung)
erhöhen
erhöhen.
Abhängigkeit des
Drehmomentes der
Vollpolmaschine von
Erregerstrom und
Polradwinkel
MK-65
Asynchronmaschine (1/2)
Die Asynchronmaschine
Di
A
h
hi
(ASM) ist
i t eine
i
D hf ld
Drehfeldmaschine
hi
und
d besitzt
b it t daher
d h
i
im
Stä d
Ständer
eine
i
d i tä i
dreisträngige
Drehstromwicklung. Der Läufer kann ebenfalls mit einer Drehstromwicklung (Schleifringläufer) oder als Kurzschlussläufer (Käfigläufer) ausgeführt sein, bei dem Profilstäbe aus Kupfer oder Bronze in den Läufernuten untergebracht sind. Bei kleineren Leistungen wird der Läufer im Spritzgussverfahren mit Aluminium hergestellt .
Links: Einfachste Ausführung einer Asynchronmaschine mit
dreisträngigem Ständer und dreisträngigem Schleifringläufer für
p = 1 und q = 1 Spule je Strang im Ständer und Läufer
Ausschnitt aus der Stirnansicht des elektromagnetisch aktiven Teils einer achtpoligen
Asynchronmaschine mit Schleifringläufer, deren
Ständer eine Einschichtwicklung mit q = 3 und deren
Läufer eine Einschichtwicklung mit q = 2 trägt.
MK-66
Asynchronmaschine (2/2)
Wesentlicher
W
tli h Vorteil
V t il der
d ASM (Käfigläufer)
(Käfi lä f ) gegenüber
üb
d Gleichstrommaschine
der
Gl i h t
hi
(GM) ist
i t der
d einfache
i f h und
d
robuste Aufbau, welcher in geringen Anschaffungs- und Wartungskosten resultiert und ein extrem weites
Anwendungsfeld eröffnet. Kleine ASM mit Leistungen unter 1kW werden in grosser Stückzahl als Einphasenmotor
für Haushalt und Gewerbe gebaut. Im Bereich mittlerer Leistung herrscht der Käfigläufer für 400V Drehspannung vor.
Die grössten Einheiten weisen Leistungen bis 30MW auf und werden mit Spannungen von 3.6kV bis max. 10kV
ausgeführt (Kesselspeisepumpen von Kraftwerken, Turboverdichter in Stahlwerken, chem. Industrie etc.).
Schematische Darstellung des Käfigs
eines Kurzschlussläufers
Funktionsprinzip
Wird die Ständerwicklung an ein Drehspannungssystem gelegt, so nehmen die drei Stränge Ströme auf, die je
eine zeitlich und räumlich phasenverschobene Durchflutung aufbauen. Resultierend bildet sich eine
Drehdurchflutung und damit bei alleiniger Berücksichtigung der Grundwelle ein magnetisches Drehfeld der
Synchrondrehzahl
f1
n1
(für f1 = 50Hz und p = 1 folgt n1 = 50U/s oder n1=3000U/min).
p
MK-67
Drehmoment und Schlupf (1/4)
Da das Drehfeld über den noch stehenden Läufer hinweg läuft, wird in den Leitern der Läuferwicklung eine
Spannung induziert. Unterstellen wir in grober Vereinfachung, dass die Stäbe nur einen ohmschen Widerstand
besitzen, besitzen die Stabströme die gleiche Verteilung wie die induzierten Spannungen. Es entstehen dann nach
F=B.l.I Tangentialkräfte
g
welche über den Läuferradius ein Drehmoment bewirken, das den Läufer in Richtung
g der
Bewegung des Magnetfeldes fortdreht.
EMK-Verteilung in den Stäben eines Käfigläufers zufolge
der Relativbewegung gegenüber dem Drehfeld;
Stabströme, die phasengleich mit den induzierten
Spannungen fliessen, bilden zusammen mit dem Drehfeld
Kräfte, die den Läufer in Richtung des Drehfeldumlaufs
g wollen
bewegen
Erreicht die Motordrehzahl den Wert n, ist die Relativdrehzahl gegenüber dem mit n1 umlaufenden Drehfeld auf den
Betrag
'n
n1 n
zurückgegangen. Für n = n1 ist n = 0, die Spannungsinduktion in den Stäben und damit Stabstrom und Drehmoment
werden zu 0. Die ASM kann daher die Synchrondrehzahl nicht exakt erreichen, da auch im Leerlauf ein geringes
Moment zur Überwindung der Reibung benötigt wird. Der Läufer läuft also nicht synchron, d.h. im Gleichlauf mit dem
Ständerdrehfeld sondern asynchron.
D relative
Der
l i Unterschied
U
hi d zwischen
i h Drehfeld
D hf ld und
d Motordrehzahl
M
d h hl wird
i d als
l Schlupf
S hl f s bezeichnet
b
i h
s
'n
n1
n1 n
n1
((s = 0 steht somit für synchronen
y
Lauf,, s = 1 für Stillstand).
) Für die Betriebsdrehzahl der ASM g
gilt damit
MK-68
n
n1 (1 s)
Drehmoment und Schlupf (2/4)
Ph ik li h anschaulich
Physikalisch
h li h erklärt
klä t sich
i h das
d
Ki
Kippmoment
t daraus,
d
d
dass
mitit wachsendem
h
d
S hl f die
Schlupf
di zeitliche
itli h PhasenPh
verschiebung des Rotorstromes gegenüber der Speisespannung steigt, d.h. der Rotorstrombelag gegenüber dem
Drehfeld eine zunehmende räumliche Phasenverschiebung aufweist und somit schliesslich trotz steigender Amplitude
des Stromes ein abnehmendes Drehmoment gebildet wird.
Einfacher können Kippschlupf und Kippmoment bei Betrachtung des Leistungsflusses verstanden werden: Für s0 gilt
R2´/s , entsprechend tritt keine Luftspaltleistung bzw. kein Drehmoment auf (synchroner Lauf). Gleiches gilt für
den theoretischen Fall s mit R2´/s 0. Demgemäss muss zwischen beiden Betriebspunkten ein Maximum der
Leistungsabgabe bzw. des Drehmomentes auftreten. Der entsprechende Betriebspunkt kann unmittelbar angegeben
werden, wenn X als innere Impedanz der Wechselspannung U1 aufgefasst wird: Es folgt dann aus der für Leistungsanpassung gültigen Gleichheit von innerer Impedanz und Lastimpedanz
Einteilung des Kreisdiagramms
nach Betriebsbereichen
R2'
sk
XV
Verlauf von Drehmoment und
Ständerstrom im Motorbereich
MK-69
Drehmoment und Schlupf (3/4)
E2 Rotor-EMK beim Stillstand des Rotors
X 2 Rotorreaktanz
R t
kt
b
beim
i Still
Stillstand
t dd
des R
Rotors
t
R2 Gesamtwiderstand des Rotors
Für einen Schlupf s:
sE2 Rotor-EMK des Rotors
sX 2 Rotorreaktanz des Rotors
R2 Gesamtwiderstand des Rotors
und der Rotorstrom:
I2 sE2
R22 (sX 2 )2
MK-70
Betriebskennlinie der
Asynchronmaschine
Drehmoment und Schlupf (4/4)
Das Drehmoment kann sich dann berechnen:
M KM
sR
R2
R22 (sX 2 )2
und das maximale Drehmoment entsteht wenn
s sm R2
X2
M max K M
1
2X 2
MK-71
Drehzahlstellung der ASM
Di wichtigsten
Die
i hti t Möglichkeiten
Mö li hk it zur Steuerung
St
d Drehzahl
der
D h hl von ASM lassen
l
sich
i h bereits
b it aus der
d Grundgleichung
G
d l i h
n
n1 (1 s )
f1
(1 s )
p
ablesen.
bl
Fü die
Für
di Änderung
Ä d
d einem
der
i
b t Drehmoment
best.
D h
t zugeordneten
d t Drehzahl
D h hl bestehen
b t h damit
d it folgende
f l
d Verfahren
V f h
1) Vergrösserung des Schlupfes s (z.B. durch Verringerung der Ständer-Speisespannung oder durch Widerstände
im Läuferkreis bei Schleifringläufermotoren)
2) Änderung der Polzahl 2p (Umschaltung der Ständerwicklung)
3)) Änderung
g der Frequenz
q
f1 der Ständer-Speisespannung
p
p
g ((Frequenzumrichterschaltungen
q
g der Leistungselektronik)
g
)
Wir wollen nachfolgend nur kurz auf die Polumschaltung und die Speisefrequenzänderung eingehen.
Polumschaltung
Eine Änderung der Polzahl des ASM bewirkt eine stufenweise Drehzahlverstellung. Der Wechsel der Polzahl kann
grundsätzlich so erfolgen, dass im Ständer in denselben Nuten zwei getrennte Wicklungen unterschiedlicher Polzahl
liegen, von denen jeweils eine in
Betrieb ist. Die grösste praktische Bedeutung hat jedoch die Dahlanderschaltung für eine Änderung der
Dreh-zahl im Verhältnis 2:1. Beim
Übergang auf die kleinere Polzahl
erfolgt eine Umschaltung der Spulengruppen I und II von Reihen- auf
P ll l h lt
Parallel-schaltung,
womitit sich
i h die
di
angegebene Strangdurchflutung einstellt.
Polumschaltbare Motoren werden z.B.
für
Werkzeugmaschinen,
Aufzüge,
Pumpen und Gebläse verwendet.
MK-72
Stern--DreieckStern
Dreieck-Anlauf von ASM
Wird eine stillstehende ASM an volle Spannung geschaltet, fliesst nach Abklingen des transienten Einschaltvorganges
bei noch stillstehender Maschine der 4 bis 7-fache Nennstrom. Die hohe Strombelastung kann zu
Spannungseinbrüchen des Netzes führen. Am öffentlichen Versorgungsnetz dürfen daher nur ASM bis zu einigen kW
g direkt eingeschaltet
g
werden. Für g
grössere Maschinen sind Massnahmen zur Absenkung
g des Einschaltstromes,
Leistung
z.B. eine Stern-Dreieckschaltung, vorzusehen.
Die ASM wird zunächst in Stern angefahren und nach dem Hochlauf in Dreieck umgeschaltet. Gegenüber dem
Normalbetrieb (Dreieckschaltung) beträgt die Strangspannung bei Sternschaltung nur das 1/3-fache des Nennwertes,
womit das Anzugsmoment auf 1/3 des Betrages bei Dreieckschaltung zurückgeht. Gleichzeitig sinkt auch der
Anlaufstrom in der Zuleitung auf 1/3 des Normalwertes.
Normalwertes
Rechts:
Strom- und Momentenverlauf bei Stern-Dreieckanlauf:
nY Betriebsdrehzahl bei Sternschaltung,
n Betriebsdrehzahl
B t i b d h hl bei
b iD
Dreiecksschaltung,
i k
h lt
--- Verlauf des Lastmomentes Mw
Unten:
Spannungen und Ströme bei Stern-Dreieckanlauf
Stern Dreieckanlauf
MK-73
Literatur--Quellen
Literatur
[1] W. Leonhard: „Regelung in der elektrischen Antriebstechnik“ - Erste Auflage. B. G. Teubner, Stuttgart ,
1974
[2] H. Eckhardt: „Grundzüge der elektrischen Maschine“ – Erste Auflage. B. G. Teubner, Stuttgart, 1982
[3] H. Kleinrath: „Grundlagen elektrischer Maschinen“ - Erste Auflage. Akademische Verlagsgesellschaft,
Wiesbaden, 1975
[4] R. Fischer: „Elektrische Maschinen“ – 6. Auflage. Carl Hanser Verlag, München/Wien, 1986
[5] G. Müller: „Grundlagen elektrischer Maschinen“ – Erste Auflage. VCH Verlagsgesellschaft mbH,
Weinheim, 1994
MK-74