Kapitel 4 Stochastische Grundlagen
Werbung

Kapitel 4
Stochastische Grundlagen
An dieser Stelle möchte ich auf einige stochastische Grundlagen eingehen, die bisher
im Kapitel 3 Anwendung gefunden haben und im Folgenden Anwendung finden werden. Grundproblem ist die Ordnung von Zufallsvariablen in der Zeit. Die Darstellung
orientiert sich an Elliott and Kopp (1999).
4.1
Filtrationen und Stoppzeiten
Sei (Ω, F, P ) ein Wahrscheinlichkeitsraum und der Zeitparameter t sei in [0, T ] oder
[0, ∞], namentlich T .
Das übliche Modell für mit der Zeit zunehmende Information ist die
Definition 1: Filtration IF = (Ft , t ∈ T ). Wobei Ft eine aufsteigende Folge von
Unter-σ-Algebren Ft ⊂ F ist1 .
Weitere Annahmen:
a) IF ist vollständig, d. h. jede Null-Menge in F gehört auch zu F0 (also zu jeder
Ft ).
b) IF ist rechts-stetig, d. h. Ft =
1
T
s>t
Fs .
Ft stellt die Menge der Ereignisse dar, die in t beurteilt werden kann, im Sinne von ist
”
eingetreten/ist nicht eingetreten“. Ft ist somit die Menge von Mengen, denen in t0 ≤ t eine
Eintrittswahrscheinlichkeit für t zugewiesen werden kann.
47
48
KAPITEL 4. STOCHASTISCHE GRUNDLAGEN
Xt
6
2/3
1
1/3
((
((((
¡Q Q
¡
Q 1/3
¡
Q
QQ
¡
¡
aa
aa1/3 ÃÃÃ
aÃÃ
1/3
-
t1
t2
t3
t
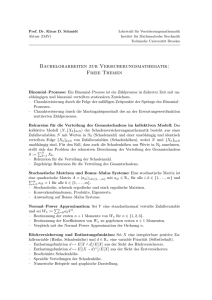
Abbildung 4.1: Zustände eines stochastischen Prozesses und deren Wahrscheinlichkeit
Bemerkung:
1. Ft stellt die Geschichte eines Prozesses bis zum Zeitpunkt t dar. Wenn ein Ereignis
(eine Menge) A ∈ F Ft -messbar ist, also A ∈ Ft , dann hängt es nur davon ab, was
bis zum Zeitpunkt t passiert. Z. B. ist das Ereignis Der DAX liegt bis zum 1.1.2008
”
unter 5000“ nicht messbar für t = 1.1.2006.
2. (Ω, Ft , P ) sei wieder ein W-Raum.
Beispiel:
Man betrachte einen stochastischen Prozess, der drei Pfade zu drei Zeitpunkten
realisieren kann, wie in Abbildung 4.1 dargestellt.
Der Grundraum Ω ist die Menge von drei Elementen ω1 , ω2 , ω3 , die die Pfade beschreiben. Wir wollen hier das Maß P betrachten, das jedem ω dieselbe Wahrscheinlichkeit, also P (ωi ) = 1/3, i=1,2,3, zuweist. Wir wollen die zufälligen Ausprägungen des Prozesses zu den Zeitpunkte t1 , t2 und t3 mit X1 , X2 und X3 bezeichnen. Die möglichen Ausprägungen sind hier X1 = x11 , X2 ∈ {x21 , x22 } und
X3 ∈ {x31 , x32 , x33 }. Der Prozess wird messbar bezüglich der Filtration:
• F1 = {{X1 = x11 }, ∅}
49
4.1. FILTRATIONEN UND STOPPZEITEN
• F2 = {{X1 = x11 }, {X1 = x11 , X2 = x21 }, {X1 = x11 , X2 = x22 }, ∅} = F1 ∪
{z
} |
{z
} |
{z
}
|
Ω
{{ω1 , ω2 }, {ω3 }}
{ω1 ,ω2 }
{ω3 }
• F3 = {{X1 = x11 }, . . . , {X1 = x11 , X2 = x21 , X3 = x32 }, . . .} = F2 ∪{{ω1 }, {ω2 }}.
|
{z
}
{z
}
|
Ω
{ω2 }
Die zusätzliche Information, die im Zeitpunkt t2 nun vorliegt, führt z. B. zu einer
veränderten Prognose für die Ausprägung des Prozesses im Zeitpunt t3 . So ist z. B.
¶
µ
1
1
x31 + x32 + I{X2 =x22 } x33 .
E(X3 | F2 ) = I{X2 =x21 }
2
2
Häufig schreibt man auch E(X3 | X2 ), wenn die σ-Algebra F2 wie hier die klein-
ste ist, die X2 messbar macht. Man nennt F2 die von X2 erzeugte σ-Algebra, bzw.
σ{X2 }. In Worten besagt obige Darstellung, dass wenn X2 den Wert x21 angenommen hat, für X3 nur noch x31 und x32 (mit gleicher Wahrscheinlichkeit) in Frage
kommen. Wenn X2 den Wert x22 angenommen hat, kommt für X3 nur noch x33 in
Frage. Dies unterscheidet sich von EX3 = 31 x31 + 13 x32 + 13 x33 , insbesondere ist das
Erste eine Zufallsvariable, das Zweite nicht.
Was man in der Finanzstochastik darübr hinaus häufig braucht, ist ein Zufallsmechanismus auf den t’s.
Definition 2: Eine Zufallsvariable T auf Ω mit Werten in T heißt Stoppzeit, falls
∀t ≥ 0 gilt
{ω : T (ω) ≤ t} = {T ≤ t} ⊂ Ft .
Bemerkung: Der Wertebereich von T ist T , die dazugehörige σ-Algebra ist die
Borel’sche.
Bemerkung: Das Ereignis {T ≤ t} hängt nur von dem ab, was bis zum Zeitpunkt
t passiert.
Beispiel:
T := Das erste Mal, dass der Wechselkurs EUR/USD > 1, 5 ist.“
”
- Der Wertebereich ist in T (F0 ist heute).
- Die Frage Ist T ≤ t?“ kann in t beantwortet werden, also kann ihr aus heutiger
”
50
KAPITEL 4. STOCHASTISCHE GRUNDLAGEN
Sicht eine Wahrscheinlichkeit, nämlich P ({ω : T (ω) ≤ t}) zugewiesen werden, d. h.
sie ist Ft -messbar.
Gegenbeispiel:
T := Der DAX wird immer unter 7000 bleiben“ kann in (keinem) Punkt t beant”
wortet werden, es kann kein Maß zugewiesen werden, außerdem bilde T nicht nach
T ab.
T := Das letzte Mal vor einem Datum (in der Zukunft), dass ein anderes Ereignis
”
eintreten wird“ ( Das letzte Mal vor 2010, dass der DAX über 5000 liegt“) kann vor
”
2010 nicht beantwortet werden, also ist es nicht Ft -messbar für t < 2010.
Grundlegende Eigenschaften:
1. T (ω) ≡ t ∀ ω ∈ Ω ist Stoppzeit. (Bew.: {T ≤ t} = Ω ∈ Ft )
2. Falls T Stoppzeit ist, dann sind auch T + s mit s ∈ IR+ Stoppzeit. (Übung)
3. Falls T und S Stoppzeiten sind, dann auch T ∧ S (min(T, S)) und T ∨ S
(max(T, S)) Stoppzeiten.
Beweis: Wegen 1. und der Abgeschlossenheit von σ-Algebren gegen Schnitte
und Komplemente gilt
{T ∧ S ≤ t} = {T ≤ t} ∪ {S ≤ t} = {{T ≤ t}c ∩ {S ≤ t}c }c ∈ Ft
und
{T ∨ S ≤ t} = {T ≤ t} ∩ {S ≤ t} ∈ Ft .
¤
Definition: Sei T eine Stoppzeit bezüglich {Ft }. Dann ist die σ-Algebra FT die
Menge der Ereignisse, die bis zur Zeit T passieren, d. h. A ∈ F, so dass
A ∩ {T ≤ t} ∈ Ft ∀t.
(Sowohl A tritt ein, als auch {T ≤ t}, jeweils symbolisiert durch Mengen von ω’s,
die in Ω enthalten sind.)
Übung: Zeige, dass FT eine σ-Algebra ist.
4.2. STOCHASTISCHE PROZESSE
51
Man kann sich FT nicht sequentiell erzeugt vorstellen: Falls T (ω1 ) = s1 , so folgt
nicht FT = Fs1 .
Theorem 4.1.1 Seien S und T Stoppzeiten2 .
• Wenn S ≤ T , dann FS ⊂ FT .
Beweis:
Sei
B ∈ FS ⇒ B ∩ {T ≤ t}
S≤T
=
∈
{T ≤ t}
B ∩ {S ≤ t} ∩
| {z }
{z
}
|
∈Ft weil B ∈ FS
∈Ft weil T Stoppzeit
Ft weil Ft σ-Algebra
⇒ B ∈ FT
¤
4.2
Stochastische Prozesse
Definition: Ein stetiger stochastischer Prozess X nimmt Werte im Maßraum (E, E)
an und ist eine Familie von Zufallsvariablen {Xt } auf (Ω, F, P ) mit Index t und
Werten in (E, E).
Beispiel: Für jedes ω gibt es einen Ölpreisverlauf (Pfad) in T . Für jedes t stellt
Xt (ω) eine mögliche Realisation des Ölpreises im Punkt t dar.
Äquivalenz von Prozessen
Wie bei (endlich multivariaten) reelwertigen Zufallsvariablen, kann man sich die
Frage nach der Gleichheit zweier stochastischer Prozesse stellen. Wir wollen hier
differenzierter von der Äquivalenz von stochastischen Prozessen sprechen und drei
verschieden starke Definitionen auflisten.
2
T ist hier zu unterscheiden von T als rechter Grenze von T .
52
KAPITEL 4. STOCHASTISCHE GRUNDLAGEN
Sei E = IR und E = B, die Borel’sche σ-Algebra auf IR. Wähle die finit-dimensionale
Fraktion Xt1 , . . . , Xtn , ti ∈ T und A ⊂ IRn .
Dann ist
ΦX
Xt1 ,...,Xtn (A) = P ({ω ∈ Ω | (Xt1 (ω), . . . , Xtn (ω)) ∈ A})
die n-dimensionale Wahrscheinlichkeitsverteilung auf der Familie {t1 , . . . , tn }.
Definition: X, Y seien stochastische Prozesse und es gelte
Y
ΦX
t1 ,...,tn (A) = Φt1 ,...,tn (A) ∀{t1 , . . . , tn }.
Dann sind X und Y äquivalent, oder auch haben dieselbe Verteilung“. Das ist nicht
”
sehr stark, da wir uns auf (endliche) abzählbare Teilmengen des T beschränken.
Stärker ist:
Definition: X, Y seien stochastische Prozesse auf (Ω, F, P ) mit Werten in (E, E).
X und Y heißen ununterscheidbar (engl indistinguishable“) falls
”
für fast alle ω ∈ Ω gilt Xt (ω) = Yt (ω) ∀t ∈ T .
Definition: X, Y wie in der letzten Definition. Gilt
Xt = Yt f.s. ∀t
so nennt man Y Modifikation von X.
Die beiden Definitionen unterscheiden sich in den Nullmengen. Im letzten Fall darf
die Nullmenge von t abhängen, im ersten Fall nicht. Bei abzählbarer Zeitmenge
(Indexmenge) unterscheiden sich die Definitionen nicht.
Martingale
Eine wichtige Familie von stochastischen Prozessen stellen die Martingale dar. Für
eine umfassende Darstellung, die im Rahmen dieser Einführung nicht angemessen
ist, siehe z. B. Musiela and Rutkowski (1997).
4.2. STOCHASTISCHE PROZESSE
53
Definition: Sei {Ft }, t ≥ 0, eine Filtration auf dem messbaren Raum (Ω, F) und
sei {Xt } ein stochastischer Prozess auf (Ω, F) mit Werten in (E, E). Dann heißt X
adaptiert an {Ft } falls Xt Ft -messbar ist ∀ t.
Definition: Sei (Ω, F, P ) ein W-Raum mit Filtration {Ft }, t ∈ [0, ∞]. Ein reel-
wertiger adaptierter stoch. Prozess {Mt } heißt Supermartingal (Submartingal) bzgl.
der Filtration {Ft } wenn
a) E[|Mt |] < ∞ ∀ t
b) E[Mt | Fs ] ≤ Ms für s ≤ t (E[Mt | Fs ] ≥ Ms )
Falls E[Mt | Fs ] = Ms für s ≤ t nennt man {Mt } Martingal.
Bemerkung: E[Mt ] = E[M0 ] wegen E[Mt ] = E[E[Mt | F0 ]] = E[M0 ].
Beispiel: Brown’sche Bewegung
Eine Standard Brown’sche Bewegung {Bt }, t ≥ 0 ist ein reelwertiger stochasti-
scher Prozess mit stetigem Pfad und stationären, normalverteilten, unabhängigen
Inkrementen, d. h.:
a) B0 = 0 f.s.
b) t → Bt (ω) ist stetig für fast alle ω ∈ Ω.
c) Für t > s ist Bt − Bs Gauß-Variable mit Erwartungswert 0 und Varianz t − s
und ist unabhängig von Fs = σ{Bu : u ≤ s}.
Theorem 4.2.1 Sei {Bt } Standard Brown’sche Bewegung bzgl. der Filtration {Ft }.
Dann gilt:
1. {Bt } ist Ft -Martingal
2. {Bt2 − t} ist Ft -Martingal
3. {eσBt −(
σ2
t)
2
} ist Ft -Martingal
54
KAPITEL 4. STOCHASTISCHE GRUNDLAGEN
Beweis: Die Bedingung a) aus der Martingaldefinition wird hier nicht untersucht.
1. Bt = Bs + Bt − Bs , E[Bt − Bs | Fs ] = 0, da Bt − Bs unabhängig von Fs und
E = 0 ist. Somit gilt E[Bt | Fs ] = Bs .
¤
2. Übung
3. Bemerkung: Falls Z ∼ N (0, 1), d. h. mit Dichte f (z) =
dann ist die Moment-erzeugende Funktion
Z
λ2
z2
1
EeλZ = √
eλz e− 2 dz = e 2 .
2π IR
2
z
√1 e− 2
2π
und λ ∈ IR,
(Siehe z. B. Johnson et al. (1994).)
Nun ist für s < t
E[eσBt −
σ2 t
2
| Fs ] = eσBs −
= eσBs −
= eσBs −
= eσBs −
σ2 t
2
σ2 t
2
σ2 t
2
σ2 s
2
E[eσ(Bt −Bs ) | Fs ]
E[eσ(Bt −Bs ) ] da Bt − Bs ∼ N (0, t − s) gilt
e
σ 2 (t−s)
2
.
¤