einem File - Fakultät für Physik
Werbung

Theoretische Physik IV
Nicolas BORGHINI
Fakultät für Physik
Universität Bielefeld
18. Juli 2013
N.BORGHINI
Theoretische Physik IV
Inhaltsverzeichnis
A
I
II
III
IV
Hydrodynamik
1
Grundbegriffe über kontinuierliche Medien
I.1 Systeme in lokalem thermodynamischem Gleichgewicht
I.2 Kontinuierliche Medien . . . . . . . . . . . . . . . . . .
I.2.1 Mechanische Spannung . . . . . . . . . . . . . .
I.2.2 Fluide . . . . . . . . . . . . . . . . . . . . . . .
I.3 Klassifizierungen der Fluide . . . . . . . . . . . . . . .
I.3.1 Flüssigkeit und Gas . . . . . . . . . . . . . . .
I.3.2 Viskoses Fluid, ideales Fluid . . . . . . . . . . .
I.3.3 Newtonsches Fluid, nicht-Newtonsches Fluid .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Geschwindigkeitsfelder in einem kontinuierlichen Medium
II.1 Lagrangesche Betrachtungsweise, Eulersche Betrachtungsweise
II.2 Definitionen . . . . . . . . . . . . . . . . . . . . . . . . . . . .
II.3 Beschleunigung eines Fluidteilchens . . . . . . . . . . . . . . .
II.4 Lokale Verteilung der Geschwindigkeiten . . . . . . . . . . . .
II.4.1 Wirbelvektor, Verzerrungstensor . . . . . . . . . . . .
II.4.2 Bedeutung der Koeffizienten des Verzerrungstensors .
II.5 Klassifizierung der Strömungen . . . . . . . . . . . . . . . . .
II.5.1 Geometrische Kriterien . . . . . . . . . . . . . . . . . .
II.5.2 Physikalische Kriterien . . . . . . . . . . . . . . . . . .
II.5.3 Kinematische Kriterien . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
4
5
5
6
6
7
7
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
8
8
8
9
9
9
10
12
12
12
13
Grundgleichungen der nicht-relativistischen Hydrodynamik
III.1 Reynolds’scher Transportsatz . . . . . . . . . . . . . . . . . . . .
III.1.1 Geschlossenes System, offenes System . . . . . . . . . . .
III.1.2 Substantielle Ableitung einer extensiven Größe . . . . . .
III.2 Massen- bzw. Teilchenzahlerhaltung: Kontinuitätsgleichung . . .
III.2.1 Integrale Formulierungen . . . . . . . . . . . . . . . . . .
III.2.2 Lokale Formulierungen . . . . . . . . . . . . . . . . . . . .
III.3 Impulssatz: Euler-Gleichung, Navier–Stokes-Gleichung . . . . . .
III.3.1 Substantielle Ableitung des Impulses . . . . . . . . . . . .
III.3.2 Ideales Fluid: Euler-Gleichung . . . . . . . . . . . . . . . .
III.3.3 Nicht-ideales Fluid: Navier–Stokes-Gleichung . . . . . . .
III.4 Energieerhaltung und Entropiebilanz . . . . . . . . . . . . . . . .
III.4.1 Energiebilanz in idealen Fluiden . . . . . . . . . . . . . .
III.4.2 Energiebilanz in Newtonschen Fluiden . . . . . . . . . . .
III.4.3 Entropiebilanz in Newtonschen Fluiden . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
14
14
14
15
16
16
16
17
17
18
21
24
24
24
25
.
.
.
.
.
.
.
28
28
28
28
28
29
30
30
Strömungen eines idealen Fluids
IV.1 Hydrostatik . . . . . . . . . . . . . . . . . .
IV.1.1 Inkompressibles Fluid . . . . . . . .
IV.1.2 Fluid in thermischem Gleichgewicht
IV.1.3 Isentropische Verteilung . . . . . . .
IV.1.4 Archimedisches Prinzip . . . . . . .
IV.2 Stationäre Lösungen . . . . . . . . . . . . .
IV.2.1 Bernoulli-Gleichung . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ii
N.BORGHINI
IV.2.2 Anwendungen der Bernoulli-Gleichung
IV.3 Erhaltung der Zirkulation . . . . . . . . . . .
IV.4 Potentialströmung . . . . . . . . . . . . . . .
IV.4.1 Geschwindigkeitspotential . . . . . . .
IV.4.2 Inkompressible Potentialströmungen .
IV.5 Wellen . . . . . . . . . . . . . . . . . . . . . .
IV.5.1 Schallwellen . . . . . . . . . . . . . . .
IV.5.2 Stoßwellen . . . . . . . . . . . . . . . .
IV.5.3 Schwerewellen . . . . . . . . . . . . . .
V
VI
Theoretische Physik IV
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
33
34
34
34
35
35
37
40
Strömungen eines Newtonschen Fluids
V.1 Statik und stationäre Strömungen eines dissipativen Fluids .
V.1.1 Statisches viskoses Fluid . . . . . . . . . . . . . . . .
V.1.2 Ebene Couette-Strömung . . . . . . . . . . . . . . .
V.1.3 Strömung zwischen zwei ruhenden Platten . . . . . .
V.1.4 Strömung in einem Rohr . . . . . . . . . . . . . . . .
V.2 Ähnlichkeitsgesetz . . . . . . . . . . . . . . . . . . . . . . .
V.3 Strömungen mit kleiner Reynolds-Zahl . . . . . . . . . . . .
V.3.1 Relevanz. Bewegungsgleichung . . . . . . . . . . . .
V.3.2 Eigenschaften der Lösungen . . . . . . . . . . . . . .
V.3.3 Strömung um eine Kugel . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
43
43
43
43
44
45
46
47
47
48
49
Hydrodynamik des relativistischen Fluids
VI.1 Grundgleichungen der relativistischen Fluiddynamik . . . . . . . .
VI.1.1 Teilchenzahlerhaltung . . . . . . . . . . . . . . . . . . . . .
VI.1.2 Energieimpulserhaltung . . . . . . . . . . . . . . . . . . . .
VI.1.3 Vierergeschwindigkeit einer Strömung. Lokales Ruhesystem
VI.1.4 Ideales relativistisches Fluid . . . . . . . . . . . . . . . . . .
VI.1.5 Dissipatives relativistisches Fluid . . . . . . . . . . . . . . .
VI.2 Nicht-relativistischer Limes . . . . . . . . . . . . . . . . . . . . . .
VI.2.1 Teilchenzahlerhaltung . . . . . . . . . . . . . . . . . . . . .
VI.2.2 Energieimpulserhaltung . . . . . . . . . . . . . . . . . . . .
VI.2.3 Entropieerhaltung . . . . . . . . . . . . . . . . . . . . . . .
VI.3 Beispiel einer relativistischen Strömung: Bjorken flow . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
52
52
52
52
53
54
56
58
59
59
60
60
Literaturverzeichnis
61
B
63
Elektrodynamik einer Punktladung
VII Wiederholung zum Elektromagnetismus
VII.1 Grundlagen der klassischen Elektrodynamik .
VII.1.1 Dynamische Variablen . . . . . . . . .
VII.1.2 Maxwell–Lorentz-Gleichungen . . . .
VII.1.3 Potentiale. Eichungen . . . . . . . . .
VII.1.4 Energieimpulstensor . . . . . . . . . .
VII.1.5 Einheiten . . . . . . . . . . . . . . . .
VII.2 Kovariante Formulierung der Elektrodynamik
VII.2.1 Viererstrom . . . . . . . . . . . . . .
VII.2.2 Feldstärketensor . . . . . . . . . . . .
VII.2.3 Viererpotential . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
65
65
65
65
66
67
67
68
68
68
69
iii
N.BORGHINI
Theoretische Physik IV
VII.2.4 Eichtransformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VII.2.5 Energieimpulstensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VIII Lagrange-Formulierung der Elektrodynamik
VIII.1 Freie Punktladung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VIII.2 Punktladung in einem elektromagnetischen Feld . . . . . . . . . . . . .
VIII.3 Elektromagnetisches Feld mit Quellen . . . . . . . . . . . . . . . . . . .
VIII.3.1 Klassische Feldtheorie. Hamilton’sches Prinzip . . . . . . . . . .
VIII.3.2 Standard Lagrange-Dichte des freien elektromagnetischen Felds
VIII.3.3 Energieimpulstensor . . . . . . . . . . . . . . . . . . . . . . . .
IX
Klassische Theorie der Strahlung
IX.1 Green’sche Funktion der vierdimensionalen Poisson-Gleichung
IX.2 Retardierte Potentiale . . . . . . . . . . . . . . . . . . . . . .
IX.3 Potentiale und Felder einer bewegten Punktladung . . . . . .
IX.3.1 Liénard–Wiechert-Potentiale . . . . . . . . . . . . . .
IX.3.2 Elektrisches und magnetisches Feld . . . . . . . . . . .
IX.3.3 Abgestrahlte Leistung . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
70
70
.
.
.
.
.
.
72
72
72
74
74
75
75
.
.
.
.
.
.
79
79
81
82
82
83
85
Literaturverzeichnis
89
C
91
X
XI
Elektrodynamik in Materie
Elektrostatik und Magnetostatik in Materie
X.1 Elektrostatik von elektrischen Leitern . . . . . . . . . . . . . . . . . . . . . . .
X.1.1 Konstitutive Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . . .
X.1.2 Leiter im elektrostatischen Gleichgewicht . . . . . . . . . . . . . . . .
X.1.3 Elektrisches Feld außerhalb eines Leiters . . . . . . . . . . . . . . . . .
X.1.4 Elektrostatische Energie eines Systems von elektrischen Leitern . . . .
X.2 Elektrostatik von Dielektrika . . . . . . . . . . . . . . . . . . . . . . . . . . .
X.2.1 Elektrische Kraft auf einen Körper. Polarisationsvektor . . . . . . . . .
X.2.2 Makroskopische elektrostatische Gleichungen. Elektrische Flussdichte .
X.2.3 Felder an der Oberfläche eines Dielektrikums . . . . . . . . . . . . . .
X.2.4 Modelle für die dielektrische Polarisation . . . . . . . . . . . . . . . . .
X.3 Magnetostatik in Materie . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
X.3.1 Magnetisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
X.3.2 Makroskopische magnetostatische Gleichungen. Magnetische Feldstärke
X.3.3 Randbedingungen an der Oberfläche eines magnetischen Materials . .
X.3.4 Modelle für die Magnetisierung . . . . . . . . . . . . . . . . . . . . . .
X.4 Energie von elektrisierter bzw. magnetisierter Materie . . . . . . . . . . . . .
X.4.1 Elektrostatische Energie . . . . . . . . . . . . . . . . . . . . . . . . . .
X.4.2 Energie magnetisierter Materie . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
94
94
94
94
96
97
99
99
100
101
101
103
103
104
104
105
106
106
107
Maxwell-Gleichungen in Materie
109
XI.1 Maxwell-Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
XI.2 Poynting-Vektor. Energiebilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
iv
N.BORGHINI
Theoretische Physik IV
XII Elektromagnetische Wellen in Materie
XII.1 Elektromagnetische Wellen im quasistationären Zustand . . . . . . .
XII.1.1 Wellengleichung . . . . . . . . . . . . . . . . . . . . . . . . .
XII.1.2 Ebene elektromagnetische Wellen in Materie . . . . . . . . .
XII.1.3 Reflexions- und Brechungsgesetz . . . . . . . . . . . . . . . .
XII.2 Elektromagnetische Wellen beliebiger Kreisfrequenz . . . . . . . . .
XII.2.1 Dielektrischer Tensor, dielektrische Funktion . . . . . . . . .
XII.2.2 Mathematische Eigenschaften der elektrischen Suszeptibilität
XII.2.3 Beispiel: elektrischer Leiter . . . . . . . . . . . . . . . . . . .
XII.2.4 Dispersion und Absorption . . . . . . . . . . . . . . . . . . .
XII.2.5 Phasen- und Gruppengeschwindigkeit . . . . . . . . . . . . .
XII.A Einfache Modelle für konstitutive Gleichungen . . . . . . . . . . . .
XII.A.1 Drude-Modell für die elektrische Leitfähigkeit . . . . . . . . .
XII.A.2 Lorentz–Drude-Modell für die elektrische Suszeptibilität . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
112
. 112
. 112
. 113
. 113
. 114
. 115
. 116
. 119
. 119
. 122
. 127
. 127
. 128
XIII Elektrodynamik eines Plasmas
XIII.1 Klassifikation von Plasmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XIII.1.1 Klassisches gegen Quantenplasma, relativistisch gegen nichtrelativistisch
XIII.1.2 Schwach gegen stark wechselwirkendes Plasma . . . . . . . . . . . . . . .
XIII.2 Elektrostatik eines Plasmas . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XIII.3 Plasmaschwingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XIII.3.1 Plasmafrequenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
XIII.3.2 Longitudinale und tranversale Wellen . . . . . . . . . . . . . . . . . . . .
XIII.AAlternative Herleitung des abgeschirmten Potentials . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
129
129
129
130
131
133
133
134
137
XIV Makroskopische Aspekte der Supraleitung
XIV.1 Phänomene der Supraleitung . . . . . . . . . . . . . . . . . . . .
XIV.1.1 Einige experimentelle Ergebnisse . . . . . . . . . . . . .
XIV.1.2 Supraleitung in Anwesenheit eines äußeren magnetischen
XIV.2 Erste Beschreibungen: London- & Pippard-Theorien . . . . . . .
XIV.2.1 London-Theorie . . . . . . . . . . . . . . . . . . . . . . .
XIV.2.2 Pippard-Theorie . . . . . . . . . . . . . . . . . . . . . .
XIV.3 Ginzburg–Laudau-Theorie . . . . . . . . . . . . . . . . . . . . .
XIV.3.1 Landau-Theorie der Phasenübergänge . . . . . . . . . .
XIV.3.2 Ginzburg–Landau-Gleichungen . . . . . . . . . . . . . .
XIV.3.3 Folgerungen der Ginzburg–Landau-Gleichungen . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
138
138
138
138
140
140
141
142
142
143
146
Literaturverzeichnis
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
. . .
Feld
. . .
. . .
. . .
. . .
. . .
. . .
. . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
148
v
N.BORGHINI
Theoretische Physik IV
vi
Teil A
Hydrodynamik
Version vom 18. Juli 2013, 9:54
1
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
I. Grundbegriffe über kontinuierliche Medien
I.1 Systeme in lokalem thermodynamischem Gleichgewicht
Die Fluiddynamik befasst sich mit der Bewegung von Systemen bestehend aus vielen Teilchen,
die sich somit durch die makroskopischen Größen der statistischen Physik bzw. der Thermodynamik beschreiben lassen, und zwar extensive (Entropie, innere Energie, Volumen, Teilchenzahl,
Gesamtimpuls1 . . . ) und intensive (Dichten der extensiven Größen, Temperatur, Druck, chemisches
Potential, mittlere Geschwindigkeit1 . . . ) Variablen. Im Allgemeinen können verschiedene Teile des
Systems sich relativ zueinander bewegen, so dass das System nicht in mechanischem und dadurch
auch nicht in thermodynamischem Gleichgewicht ist. Streng genommen sind die oben genannten
thermodynamischen Zustandsvariablen nicht mehr definiert für das System.
Unter vielen Umständen kann aber noch das System (in Gedanken) in kleine „Zellen“ geteilt
werden, wobei die folgenden Bedingungen erfüllt sind:
(i) einerseits ist jede Zelle groß genug, damit sie als ein thermodynamisches System behandelt
wird — d.h. die relative Schwankung jeder gewöhnlichen thermodynamischen Variable soll
vernachlässigbar sein;
(ii) andererseits variieren die (extensiven) thermodynamischen Variablen nur wenig über die Skala
einer Zelle — d.h. sie dürfen nicht zu groß sein —, damit jede Zelle annähernd homogen ist.
Unter diesen Annahmen können lokale thermodynamische Variablen definiert werden, entsprechend
den jeweiligen Werten in jeder Zelle der extensiven Zustandsgrößen.2 Dabei werden diese lokalen
Variablen durch den Ortsvektor ~r des Schwerpunkts der zugehörigen Zelle gekennzeichnet: S(~r),
U (~r), N (~r), P~ (~r). . .
Diese lokalen thermodynamischen Variablen sind in jeder Zelle proportional zum Volumen der
Zelle. Da das Letztere keine physikalisch Bedeutung hat, ist es sinnvoller, die Dichten der lokalen
Größen zu verwenden: Entropiedichte s(~r), (innere) Energiedichte e(~r), Teilchendichte n (~r) bzw.
Massendichte ρ(~r), usw. Anstatt der Impulsdichte benutzt man eher das Geschwindigkeitsfeld (auch
Strömungsgeschwindigkeit genannt) ~v(~r), das gleich dem Mittelwert der Geschwindigkeiten ~vk der
N (~r) Teilchen (Atome oder Molekülen) in der Zelle ist:
~v(~r) =
N (~
r)
1 X
~vk ,
N (~r)
(I.1)
k=1
Die Impulsdichte ist dann einfach ρ(~r)~v(~r).
Bemerkung: Während die Geschwindigkeiten vk im thermischen Gleichgewicht durch die MaxwellVerteilung gegeben sind, und deshalb bei T = 300 K der Ordnung 102 − 103 m·s−1 sind, kann die
mittlere Geschwindigkeit v(~r) viel kleiner sein.
~ eines Systems oft nicht erwähnt, denn das System wird implizit
In der Thermodynamik wird der Gesamtimpuls P
~ = ~0) beschrieben. Geht man in ein inertiales Bezugssystem über, wo der Gesamtimpuls
in seinem Ruhesystem (P
~ ist, so ändert sich die Entropie des (hier als nicht-relativistisch angenommenen) Systems nicht, während dessen
P
~ 2 /2M wird, mit M dessen Gesamtmasse bzw. U dessen inneren Energie:
Energie E = U + P
~2
P
~ = S(U, ~0).
S U+
,P
2M
Leitet man diese Gleichung nach einer der Komponenten Pi des Impulses ab, so findet man, dass die dazu konjugierte
Variable gleich −vi /T ist, mit vi = Pi /M der i-ten Komponente der mittleren Geschwindigkeiten des Systems und T
der Temperatur.
2
... mit der Ausnahme des Volumens, weil das Volumen einer bestimmten Zelle beliebig und damit physikalisch
irrelevant ist.
1
I. Grundbegriffe über kontinuierliche Medien
3
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Eine wichtige Annahme — die hiernach immer gemacht wird — ist, dass das makroskopische
System sich im lokalen thermodynamischen Gleichgewicht befindet. Dies gilt, wenn die „Fundamentalgleichung“ zwischen der Entropiedichte und den anderen lokalen Dichten die gleiche Form hat,
wie die Beziehung zwischen der Entropie und den extensiven Parametern in einem System im (“globalen“) thermodynamischen Gleichgewicht. Dann kann man die zu den (Dichten der) extensiven
Größen konjugierten intensiven Größen auch lokal definieren: T (~r), P (~r), µ(~r), . . . , mit der üblichen
physikalischen Deutung. Dazu sind in jeder Zelle die Zustandsgleichungen die gleichen wie in einem
System im globalen thermodynamischen Gleichgewicht.
Drückt man die zwei obigen Bedingungen anders aus, so soll nach (ii) die charakteristische
Längenskala einer Zelle viel kleiner als die typische Skala L für die Variationen der physikalischen
Eigenschaften des Systems sein. Infolgedessen kann man eine „coarse-grained“ Beschreibung verwenden, indem die Zellen als punktförmig bzw. der Ortsvektor ~r als ein stetiger Parameter betrachtet
werden. Die lokalen Größen werden dann Felder . Im Allgemeinen hängen die Letzteren auch, neben
dem Ortsvektor, von der Zeit t ab: s(t, ~r), e(t, ~r), n (t, ~r), ρ(t, ~r), ~v(t, ~r), T (t, ~r), P (t, ~r), µ(t, ~r), . . .
Das System wird somit als ein kontinuierliches Medium beschrieben, dessen diskrete mikroskopische
Struktur ignoriert wird.
Umgekehrt darf man in einer solchen kontinuierlichen Modellierung Phänomene bei der atomaren
bzw. molekularen Skala prinzipiell nicht betrachten.
Bemerkungen:
∗ Die oben eingeführte „makroskopische“ Skala L kann eine charakteristische Dimension eines Gefäßes bzw. eines Rohrs sein, in dem das Medium eingeschlossen ist bzw. fließt. Im Fall von Schwingungen im Medium kann L auch einer Wellenlänge entsprechen:
"
#−1
~
∇
X
(t,
~
r
)
L∼
,
=
|X (t, ~r)|
mit X (t, ~r) einer physikalischen Größe. Dann gilt die Beschreibung als ein kontinuierliches Medium
nur bei „großen“ Wellenlängen.
∗ Bedingung (i) besagt insbesondere, dass die typische Längenskala der Zellen viel größer als die
mittlere freie Weglänge3 `mfp der Teilchen sein soll, damit thermodynamisches Gleichgewicht in
jeder Zelle erreicht wird. Wiederum soll `mfp viel kleiner als die Längenskala L sein, d.h. es muss
für die dimensionslose Knudsen-Zahl
`mfp
Kn ≡
1
(I.2)
L
gelten, damit man sinnvoll von einem kontinuierlichen Medium sprechen kann.
Beispielsweise ist die mittlere freie Weglänge `mfp ≈ 0, 1 µm für Luft bei P = 105 Pa, T = 300 K.
Für eine typische Dimension des Systems L ≈ 10 cm ist dann Kn ≈ 10−6 , so dass die Luft als
kontinuierlich betrachtet werden kann.
Der Gegenfall Kn > 1 ist der der verdünnten Medien, z.B. des sogennannten Knudsen-Gases,
worin die Stöße zwischen Molekülen vernachlässigbar sind. Die Strömung solcher Medien wird
nicht durch die Kontinuumsmechanik beschrieben, sondern erfordert andere Beschreibungen wie
z.B. eine freie Molekularströmung oder Molekulardynamik
I.2 Kontinuierliche Medien
Grob betrachtet können kontinuierliche Medien in zwei Klassen ausgeteilt werden, und zwar
einerseits die Festkörper, die Gegenstände der Elastizitätstheorie sind, und andererseits die Fluide,
3
Hier steht mfp für mean free path.
I. Grundbegriffe über kontinuierliche Medien
4
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
die durch die Fluiddynamik beschrieben werden. Der Unterschied zwischen Festkörpern und Fluiden
beruht auf dem hiernach diskutierten Begriff der mechanischen Spannung.
I.2.1 Mechanische Spannung
Es sei ein durch eine abgeschlossene Fläche S abgegrenzter Bereich mit dem Volumen V in einem
kontinuierlichen Medium.
d2 S ~en
d2 F~s
V
S
Auf diesen Bereich wirken zwei Arten von Kräften:
• Volumenkräfte, die in jedem Punkt des Volumens wirken: z.B. die Schwerkraft oder Scheinkräfte (Coriolis-Kraft, Zentrifugalkraft) in nichtinertialen Bezugssystemen;
• Oberflächenkräfte, die auf die Oberfläche wirken.
Wenn d2 F~s die Oberflächenkraft auf ein infinitesimal kleines Oberflächenelement d2 S um den Punkt
M bezeichnet, dann heißt der Vektor
d2 F~s
~τs ≡ 2
(I.3)
d S
mechanische Spannung im Punkt M . Die SI-Einheit der mechanischen Spannung ist das Pascal.
~τs kann in die Summe zweier Komponenten zerlegt werden: einen Vektor senkrecht zu d2 S, die
Normalspannung, und einen Vektor der im Punkt M Tangentialebene, die Tangentialspannung (auch
Scher- oder Schubspannung genannt). Eine nach innen bzw. außen gerichtete Normalspannung wird
als Druck- bzw. Zugsspannung bezeichnet.
Sei ~en der nach außen gerichtete Normaleinheitsvektor im Punkt M und ~r der Ortsvektor diesem
Punkt in einem gegebenen Bezugssystem. Dann ist der Zusammenhang zwischen ~en und ~τs linear:
~τs = ~~σ(~r) · ~en ,
(I.4)
mit ~~σ(~r) einem Tensor zweiter Stufe, dem (Cauchy’schen) Spannungstensor . Komponentenweise
lautet diese Gleichung τs,i = σij en,j für i = 1, 2, 3, mit τs,i bzw. en,j den Komponenten von ~τs
bzw. ~en und σij den Komponenten des Spannungstensors, wobei die Summe über den doppelt
auftretenden Index j = 1, 2, 3 nicht geschrieben wird.
I.2.2 Fluide
Mithilfe des Begriffs der mechanischen Spannung kann die Definition eines Fluids klargestellt
werden:
Ein Fluid ist ein kontinuierliches Medium, das sich deformiert, solange Tangentialspannungen
angewandt werden.
Anders gesagt sind in einem ruhenden Fluid die mechanischen Spannungen definitionsgemäß
unbedingt normal, d.h. der Spannungstensor ist in jedem Punkt diagonal, und im Fall eines isotropen
~σ(t, ~r) = −P (t, ~r) ~~1, mit P (t, ~r) dem hydrostatischen Druck
Fluids proportional zum Einheitstensor: ~
im Punkt ~r zur Zeit t — in einem ruhenden Fluid sind aber Druck und Spannungstensor tatsächlich
zeitunabhängig, da Ruhe ein stationäres Regime ist.
I. Grundbegriffe über kontinuierliche Medien
5
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkungen:
∗ Unter der Wirkung von Tangentialspannungen deformiert sich ein Festkörper ebenfalls. Für eine
gegebene Tangentialspannung wird dennoch nach einer Weile eine Gleichgewichtslage erreicht (sonst
handelt sich nicht um einen Festkörper, sondern um ein Fluid!). Wenn die entsprechende Verformung
völlig verschwindet, nachdem die Spannung nicht mehr angewandt wird, wird der Festkörper als
elastisch bezeichnet. Im Gegenfall spricht man von einem plastischen Festkörper.
∗ Die vorige Bemerkung ist tatsächlich eine Vereinfachung, entsprechend den Zeitskalen des menschlichen
Alltags. Somit können sich Festkörper unseres Alltags — wie z.B. Gesteine des Erdmantels — langfristig —
in diesem Fall über geologische Zeitskalen — wie Flüssigkeiten verhalten. Ob eine gegebene Substanz sich
wie ein Fluid oder ein Festkörper wird manchmal durch eine dimensionslose Zahl, die Deborah-Zahl [1],
charakterisiert, die die typische Zeit für die Response der Substanz zu einer mechanischen Spannung mit der
Beobachtungszeit vergleicht.
I.3 Klassifizierungen der Fluide
I.3.1 Flüssigkeit und Gas
Die alltägliche Erfahrung lehrt, dass es schon zwei unterschiedliche Arten von Fluiden gibt, und
zwar Flüssigkeiten und Gase.
Unter dem thermodynamischen Gesichtspunkt ist der Unterschied zwischen Flüssigkeiten —
die „ein bestimmtes Volumen, aber keine bestimmte Gestalt haben“ — und Gasen — die „den
ganzen zur Verfügung stehenden Raum nehmen“ — nicht immer so klar, insbesondere in der Nähe
des kritischen Punkts am Ende der Dampfdruckkurve. Weit vom kritischen Punkt gibt es aber
ausgeprägte Unterschiede.
• In Flüssigkeiten und Gasen bewegen sich die Moleküle aufgrund der Wärmebewegung ständig.
In einer Flüssigkeit bleibt aber der Abstand zwischen Nachbarmolekülen derselben Ordnung
wie die Größe der Moleküle, während in einem Gas der intermolekulare Abstand groß bezüglich
der Größe der Moleküle ist.
Infolgedessen ist die Teilchendichte bzw. die Massendichte eines Gases deutlich kleiner als die
einer Flüssigkeit.
Beispielsweise gilt für ein ideales Gas n ≈ 1025 − 1026 m−3 (vgl. die Loschmidt-Konstante
NL = NA /(22, 4·10−3 m3 ) = 2, 69·1025 m−3 ), während für eine Flüssigkeit n ≈ 1028 −1029 m−3 .
Ähnlicherweise ist ρLuft = 1, 293 kg·m−3 etwa tausendmal kleiner als ρH2 O = 103 kg·m−3 .
• Flüssigkeiten und Gase unterscheiden sich erheblich in Bezug auf ihre isothermen Kompressibilitäten
1 ∂V
1 ∂ρ
χT = −
=
.
(I.5)
V ∂ P T,N
ρ ∂ P T,N
Für flüssiges Wasser bei T = 20o C gilt χT = 4, 4 · 10−10 Pa−1 : ein Druck von 108 Pa (d.h.
was man im Marianengraben findet) ist also nötig, um eine Variation ∆ρ/ρ von um 4, 4% zu
erhalten.
Für ein ideales Gas ist χT = 1/P , entsprechend 10−5 Pa−1 bei atmosphärischem Druck, so
dass eine Variation ∆ρ/ρ = 4, 4% eine Druckvariation von nur ∆P = 4000 Pa = 40 mbar
erfordert.
Bemerkung: Als Folge des letzteren Unterschieds klingt es verlockend, eine Flüssigkeit meistens
als ein inkompressibles Fluid bzw. ein Gas als kompressibel zu betrachten. In der Praxis ist es aber
nicht so einfach, und die Eigenschaft „kompressibel“ bezieht sich mehr auf die Strömung als auf das
strömende Fluid, s. Abschn. II.5 unten.
I. Grundbegriffe über kontinuierliche Medien
6
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
I.3.2 Viskoses Fluid, ideales Fluid
In einem realen Fluid in Bewegung existieren Tangentialspannungen, so dass die unterschiedlichen Schichten des Fluids nicht „reibungslos“ aufeinander rutschen können, und die Strömung von
der Umwandlung kinetischer Energie in Wärme begleitet ist.
Das Modell eines Fluids, in dem die mechanischen Spannungen immer normal sind, entsprechend der Abwesenheit von inneren Reibungskräften, wird ideales Fluid genannt, im Gegensatz
zum viskosen Fluid .4
Bemerkungen:
∗ Ein ideales Gas ist kein ideales Fluid, sondern ein viskoses Fluid! Es kann aber passieren, dass in
gegebenen Umständen diese Viskosität keine Rolle spielt: dann kann das ideale Gas als ein ideales
Fluid modelliert werden.
∗ Die Näherung eines idealen Fluids kann oft die Eigenschaften einiger Bereiche einer realen Strömung gut darstellen, aber nicht die ganze Struktur der Strömung.
I.3.3 Newtonsches Fluid, nicht-Newtonsches Fluid
Im Allgemeinen hängt der Spannungstensor ~~σ(t, ~r) in einem Punkt eines Fluids von dessen Massendichte
~ v(t, ~r) der partiellen Ableitungen ∂vi (t, ~r)/∂xj der
ρ(t, ~r) und Temperatur T (t, ~r) ab, sowie vom Tensor ∇~
Strömungsgeschwindigkeit.
Ein Fluid weist ein sogenanntes Newtonsches Verhalten, wenn das Fluid isotrop ist, und wenn ~~σ eine
~ v ist. Für übliche Fluide entsprechen diese Bedingungen dem „normalen“ Verhalten.
lineare Funktion von ∇~
Sonst spricht man von nicht-Newtonschen Fluiden: beispielsweise Flüssigkeiten mit einer hohen Viskosität
~ v ab bzw. die Viskosität hängt von ~v ab) oder anisotrope Fluide.
~σ nicht linear von ∇~
(dann hängt ~
Literatur
• Feynman [2, 3] Kapitel 39–1;
• Guyon et al. [4] Kapitel 1.1
• Faber [5] Kapitel 1.1–1.3
• zur Elastizitätstheorie: Feynman [2, 3] Kapitel 38, 39; Landau–Lifshitz, Band VII [6].
4
In seinen Vorlesungen [2, 3] bezeichnet Feynman das ideale Fluid als „trockenes Wasser“ (dry water), und das
viskose Fluid als „nasses Wasser“ (wet water).
I. Grundbegriffe über kontinuierliche Medien
7
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
Dieses Kapitel befasst sich mit der Kinematik der Bewegung — der Strömung — eines Fluids.
Hiernach bezeichnen xi , vi , . . . die kartesischen Koordinaten des Ortsvektors ~r, der Strömungsgeschwindigkeit ~v, . . . in einem gegebenen orthonormalen Bezugssystem.
II.1 Lagrangesche Betrachtungsweise, Eulersche Betrachtungsweise
Die Mechanik des Punktteilchens verwendet gewöhnlich implizit die Lagrangesche Betrachtungsweise, in der man der individuellen Bewegung jedes Teilchens eines Systems (zumindest in Gedanken) folgt. In einem gegebenen Bezugssystem erhält man dann die Position ~r jedes Teilchens in
Abhängigkeit von der Zeit, d.h. die Bahnkurve ~r(t).
In diesem Kapitel wird diese Betrachtungsweise mehrmals benutzt, indem die Bewegung der
Teilchen eines kleinen Fluidelements — das als Fluidteilchen bezeichnet wird — betrachtet wird.
In der Fluiddynamik benutzt man aber meistens eher die Eulersche Betrachtungsweise. Dabei
wird in jedem Punkt ~r die Zeitentwicklung der lokalen makroskopischen Größen, welche die Freiheitsgraden der Theorie darstellen, betrachtet. Die Eulersche Betrachtungsweise ist also die natürliche
Beschreibung für eine Feldtheorie.
Bemerkungen:
∗ Beide Betrachtungsweisen sind wesentlich unterschiedlich:
• in der Lagrangeschen Beschreibung stellt d~r/dt bzw. d2~r/dt2 die Geschwindigkeit bzw. die
Beschleunigung eines Teilchens, dessen Bewegung gefolgt wird;
• in der Eulerschen Betrachtungsweise haben d~r/dt und d2~r/dt2 keine physikalische Bedeutung,
da ~r nur ein Parameter ist, wie die Zeit t, aber keine dynamische Variable.
∗ Die Eulersche Betrachtungsweise wird auch „Raumbeschreibung“ genannt: die Teilchen, die sich
zu sukzessiven Zeitpunkten in einem gegebenen Punkt befinden, sind im Allgemeinen unterschiedlich; der Ort bleibt unverändert. Im Gegensatz wird die Lagrangesche Betrachtungsweise manchmal
als „Materialbeschreibung“ bezeichnet, denn sie folgt den Änderungen der Position eines bestimmten
Stücks Materie.
II.2 Definitionen
Es sei ein Geschwindigkeitsfeld ~v(t, ~r).
• Eine Stromlinie zur gegebenen Zeit t ist eine Feldlinie der Strömungsgeschwindigkeit, d.h. eine
Kurve, die in jedem Punkt ~r tangential zur Geschwindigkeit ~v(t, ~r) im selben Punkt verläuft.
Eine durch λ parametrisierte Stromlinie ~x(λ) ist also eine Lösung von
d~x(λ)
= α(λ)~v(t, ~x(λ))
dλ
∀λ,
(II.1a)
mit α(λ) einer skalaren Funktion, oder äquivalent
dx1
dx2
dx3
=
=
.
v1 (t, ~r)
v2 (t, ~r)
v3 (t, ~r)
(II.1b)
• Es sei dann eine abgeschlossene Kurve. Die Stromlinien, die diese Kurve berühren, bilden eine
schlauchartige Oberfläche, die Stromröhre, die einen Stromfaden einschließt.
• Die sukzessiven Positionen eines (infinitesimal kleinen) Fluidteilchens, das sich ursprünglich
in einem gegebenen Punkt befand, bilden eine Streichlinie.
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
8
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
• Das Geschwindigkeitsfeld wird als gleichförmig in einem Bereich bezeichnet, wenn ~v(t, ~r) denselben Wert in jedem Punkt ~r des Bereichs zur Zeit t annimmt.
In diesem Fall sind die Stromlinien im Bereich parallele Linien.
• Das Geschwindigkeitsfeld bzw. die Strömung wird stationär genannt, wenn ~v(t, ~r) nur vom
Ort aber nicht von der Zeit abhängt.
Die Stromlinien einer stationären Strömung stimmen mit den Strichlinien überein.
II.3 Beschleunigung eines Fluidteilchens
Ein Fluidteilchen sei zur Zeit t im Punkt ~r, wo die Strömungsgeschwindigkeit ~v(t, ~r) beträgt,
und um t + dt im Punkt ~r + d~r, wo die Fluidgeschwindigkeit ~v(t + dt, ~r + d~r) ≡ ~v(t, ~r) + d~v ist.
Unter der Annahme, dass ~v(t, ~r) differenzierbar ist, gilt zur niedrigsten Ordnung
d~v =
∂~v(t, ~r)
∂~v(t, ~r)
∂~v(t, ~r)
∂~v(t, ~r)
dt +
dx1 +
dx2 +
dx3 ,
∂t
∂x
∂y
∂z
d.h.
∂~v(t, ~r)
~ v(t, ~r),
dt + (d~r · ∇)~
(II.2)
∂t
~ = dx1 ∂ + dx2 ∂ + dx3 ∂ eingeführt wurde.
wobei der Operator d~r · ∇
∂x1
∂x2
∂x3
Gemäß der Definition der Strömungsgeschwindigkeit im Punkt ~r zur Zeit t bewegt sich das
Fluidteilchen zwischen t und t + dt — hier verwendet man die Lagrangesche Betrachtungsweise —
d~r = ~v(t, ~r) dt. Dementsprechend stellt das aus Gl. (II.2) resultierende Verhältnis d~v/dt genau
die Beschleunigung ~a(t) des Fluidteilchens dar. In der Fluiddynamik wird dieser Quotient oft als
D~v(t, ~r)/Dt bezeichnet:
d~v =
~a(t) =
• Die lokale Beschleunigung
∂~v(t, ~r) ~ ~v(t, ~r) ≡ D~v(t, ~r) .
+ ~v(t, ~r) · ∇
∂t
Dt
(II.3)
∂~v
folgt aus der Nichtstationarität des Geschwindigkeitsfelds.
∂t
~ v kommt aus der Nichtgleichförmigkeit der Strömung, und wird konvektive
• Der Term (~v · ∇)~
Beschleunigung (oder manchmal Transportbeschleunigung) genannt.
Der Operator
D
∂
~
≡
+~v(t, ~r) · ∇
Dt
∂t
(II.4)
spielt in der Fluiddynamik eine wesentliche Rolle, denn er drückt die Zeitableitung in der Lagrangeschen Betrachtungsweise durch die Felder der Eulerschen Beschreibung aus. D/Dt wird substantielle
Ableitung oder auch konvektive Ableitung genannt, um darauf hinzudeuten, dass man der Bewegung
einer „Substanz“ (eines Fluidteilchens) folgt.
II.4 Lokale Verteilung der Geschwindigkeiten
Es sei ~v(t, ~r) bzw. ~v(t, ~r) + d~v die Fluidgeschwindigkeit im Punkt ~r bzw. ~r + d~r zur selben Zeit t.
II.4.1 Wirbelvektor, Verzerrungstensor
Die Taylor-Entwicklung der Komponente i des Geschwindigkeitsfeldes zur ersten Ordnung lautet
dvi =
3
X
∂vi (t, ~r)
j=1
∂xj
dxj ,
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
9
N.BORGHINI
d.h.
Theoretische Physik IV
Hydrodynamik
~~
d~v = M(t,
~r) · d~r,
∂vi (t, ~r)
~~
bezeichnet.5
wobei M(t,
~r) den Tensor der Mij (t, ~r) ≡
∂xj
Dieser Tensor kann als Summe eines symmetrischen und eines antisymmetrischen Tensors zerlegt
werden:
~
~
~
~
M(t,
~r) = ~D(t, ~r) + ~R(t, ~r),
mit den Komponenten
1 ∂vi (t, ~r) ∂vj (t, ~r)
Dij (t, ~r) =
+
,
2
∂xj
∂xi
Rij (t, ~r) =
1 ∂vi (t, ~r) ∂vj (t, ~r)
−
.
2
∂xj
∂xi
(II.5)
Die drei Zahlen Ω1 (t, ~r) ≡ −R23 (t, ~r), Ω2 (t, ~r) ≡ −R31 (t, ~r) und Ω3 (t, ~r) ≡ −R12 (t, ~r) bilden die
~ ~r), und zwar
Komponenten eines Vektors Ω(t,
~ ~r) = 1 ∇
~ ×~v(t, ~r).
Ω(t,
2
(II.6)
~ ~r) wird Wirbelvektor genannt. Mithilfe des Wirbelvektors kann der Zusammenhang zwischen
Ω(t,
d~r und der Variation der Geschwindigkeitsfeld zwischen zwei benachbarten Punkten geschrieben
werden als
~
~ ~r) × d~r.
d~v = ~D(t, ~r) · d~r + Ω(t,
(II.7)
~
Die Bedeutung des zweiten Terms auf der rechten Seite ist klar: bei verschwindendem ~D(t,r̃)
kommt
~ ~r) × d~r,
~v(t, ~r + d~r) = ~v(t, ~r) + Ω(t,
d.h. genau die Beziehung für die Verteilung der Geschwindigkeiten eines starren Körpers mit dem
~ ~r). Somit characterisiert der Tensor ~~D(t,r̃) die lokale Abweichung
momentanen Rotationsvektor Ω(t,
der Struktur der Strömungsgeschwindigkeit von derjenigen des Geschwindigkeitsfelds für einen star~ ~r). Deswegen wird ~~D(t,r̃) Verzerrungstensor (oder
ren Festkörper mit dem Rotationsvektor Ω(t,
auch Dehnungs- oder Deformationsgeschwindigkeitstensor ) genannt.
Bemerkungen:
~ ~r) = ∇
~ ×~v(t, ~r).
∗ Man definiert noch die Wirbligkeit als ω
~ (t, ~r) ≡ 2Ω(t,
~ ~r) bzw. die Wirbligkeit ω
~ · (∇
~ ×~v) = 0!]
∗ Der Wirbelvektor Ω(t,
~ (t, ~r) stellt ein divergenzloses [∇
(Pseudo-)Vektorfeld dar, dessen Feldlinien die sogenannten Wirbellinien sind. Die letzteren sind
gegeben durch [vgl. Gl. (II.1b)]
dx1
dx2
dx3
=
=
.
Ω1 (t, ~r)
Ω2 (t, ~r)
Ω3 (t, ~r)
(II.8)
II.4.2 Bedeutung der Koeffizienten des Verzerrungstensors
~ ~r) = ~0 angenommen.
Der Einfachheit halber wird in diesem Abschnitt Ω(t,
II.4.2
a Diagonalkoeffizenten
::::::::::::::::::::::::::::
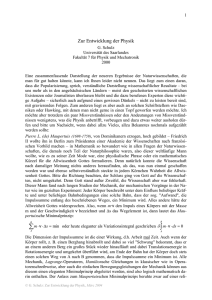
Es seien dx1 , dx2 die Längen zur Zeit t der Seiten eines Elementarrechtecks im Fluid, wie in
Abb. II.1 dargestellt wird. Zunächst wird Dij (t, ~r) = 0 für i 6= j angenommen.
~D(t,r̃) und ~
~R(t,r̃) jeweils
~ v(t, ~r) bezeichnet. Dann lauten die Tensoren ~
Dieser Tensor zweiter Stufe wird auch als ∇~
T T 1
1
~
~
~D(t, ~r) = ∇~
~R(t, ~r) = ∇~
~ v(t, ~r) + ∇~
~ v(t, ~r)
~ v(t, ~r) − ∇~
~ v(t, ~r)
,
,
2
2
T
~ v(t, ~r) dem transponierten Tensor von ∇~
~ v(t, ~r).
mit ∇~
5
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
10
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
x2
δ(dx1 ) = dv1 dt
x2
δ(dx2 ) = dv2 dt
(v2 +dv2 )dt
dx2
v2 dt
x1
x1
v1 dt
dx1
(a)
(v1 +dv1 )dt
(b)
Abbildung II.1: Zeitentwicklung eines Elementarrechtecks in der wirbelfreien Strömung eines Fluids.
(a) zur Zeit t; (b) zur Zeit t + dt, im Fall Dij = 0 für i 6= j.
Zur Zeit t + dt besetzt das Fluidelement ein anderes Rechteck, dessen Seitenlängen gewachsen
sind um
∂vi (t, ~r)
δ(dxi ) = dvi dt =
dxi dt = Dii (t, ~r) dxi dt,
∂xi
so dass die relative Dehnung der Seite i in der Zeit dt durch
δ(dxi )
= Dii (t, ~r) dt
dxi
(II.9)
gegeben ist. Der Diagonalkoeffizient Dii (t, ~r) stellt also die lokale Geschwindigkeit der linearen
Dehnung in der Richtung i dar.
II.4.2
b Volumenänderungen
::::::::::::::::::::::::::::
Das relative Wachstum in dt eines Elementarquaders mit dem Volumen dV = dx1 dx2 dx3 zur
Zeit t ist laut Gl. (II.9) gegeben durch
δ(dV)
δ(dx1 ) δ(dx2 ) δ(dx3 ) =
+
+
= D11 (t, ~r) + D22 (t, ~r) + D33 (t, ~r) dt.
dV
dx1
dx2
dx3
~
Die Spur von ~D(t,r̃), die gerade gleich der Divergenz der Geschwindigkeit ist:
D11 (t, ~r) + D22 (t, ~r) + D33 (t, ~r) =
∂v1 (t, ~r) ∂v2 (t, ~r) ∂v3 (t, ~r) ~
+
+
= ∇ · ~v(t, ~r),
∂x1
∂x2
∂x3
stellt also die lokale Geschwindigkeit der Volumendilatation des Fluids dar. Deswegen wird eine
Strömung in einem Bereich als inkompressibel bezeichnet, wenn das Geschwindigkeitsfeld in diesem
Bereich divergenzlos ist:
~ · ~v(t, ~r) = 0.
inkompressible Strömung ⇔ ∇
(II.10)
II.4.2
c Nichtdiagonale Koeffizenten
:::::::::::::::::::::::::::::::::::
Jetzt wird angenommen, dass D12 (t, ~r) der einzige nicht-verschwindende Koeffizient des Verzerrungstensors ist. Unter dieser Annahme kann die Zeitentwicklung in dt des Elementarrechtecks der
Abb. II.1(a) untersucht werden.
Mit
∂v1 (t, ~r)
∂v2 (t, ~r)
dv1 =
dx2 ,
dv2 =
dx1
∂x2
∂x1
zeigt Abb. II.2, dass ein zur Zeit t gerader Winkel den Wert π/2 − δα zur Zeit t + dt annimmt, mit
δα = δα1 + δα2 ,
δα1 =
dv2 dt
∂v2 (t, ~r)
=
dt,
dx1
∂x1
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
δα2 =
dv1 dt
∂v1 (t, ~r)
=
dt.
dx2
∂x2
11
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
x2
(v1 +dv1 ) dt
δα2
δα1
(v2 +dv2 ) dt
v2 dt
x1
v1 dt
Abbildung II.2: Verformung eines Elementarrechtecks in einer Strömung.
Damit stellt der nichtdiagonale Koeffizient
1 δα
2 dt
die halbe lokale Geschwindigkeit der Winkelverformung um die Richtung x3 dar.
D12 (t, ~r) =
(II.11)
II.5 Klassifizierung der Strömungen
II.5.1 Geometrische Kriterien
Im allgemeinen Fall hängen die charakteristischen Eigenschaften einer Strömung von der Zeit
sowie von den drei Raumkoordinaten ab.
In mehr oder weniger idealisierten Modellierungen ist es aber möglich, dass nur zwei Koordinaten eine Rolle spielen: dann spricht man von einer zweidimensionalen Strömung. Beispielsweise
kann die Strömung von Luft um einen Flugzeugflügel in erster Näherung als zweidimensional betrachtet werden; dann werden in einem zweiten Schritt die Randeffekte bei den Enden des Flügels
berücksichtigt.
Für einige Strömungen, z.B. in Röhren, kann man annehmen, dass die Eigenschaften nur von
einer Koordinate abhängen: dabei handelt es sich um eindimensionale Strömungen. In dieser Näherung werden tatsächlich die Größen durch ihren Mittelwert über den Querschnitt des Rohrs ersetzt.
Andererseits wird zwischen inneren und äußeren Strömungen unterschieden, je nachdem, ob das
Fluid innerhalb fester Wände — z.B. in einer Röhre — oder um einen Körper — z.B. um einen
Flugzeugflügel — strömt.
II.5.2 Physikalische Kriterien
Je nachdem, ob die Kompressibilität des Fluids berücksichtigt werden soll oder nicht, ist die
~ ·~v 6= 0) oder inkompressibel (∇
~ ·~v = 0). Unter gewissen Bedingungen
Strömung kompressibel (∇
kann auch die Strömung eines eigentlich kompressiblen Fluids als inkompressibel betrachtet werden!
In der Praxis spielt die Kompressibilität nur eine Rolle in Bereichen, wo das Fluid „schnell“
strömt, und zwar wo die Mach-Zahl (II.12) nicht sehr klein gegen 1 ist, d.h. (grob gesagt)
Ma & 0.2.
Analog spricht man von viskosen bzw. nicht-viskosen Strömungen.
Andere thermodynamische Kriterien werden auch benutzt: isotherme Strömungen, isentropische
Strömungen, usw.
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
12
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
II.5.3 Kinematische Kriterien
In Abschnitt II.2 wurde schon der Unterschied zwischen gleichförmigen — die Eigenschaften
der Strömung hängen nicht von dem Ort ab — und ungleichförmigen bzw. stationären — d.h.
zeitunabhängigen — und nichtstationären Strömungen eingeführt.
~ ~r) in jedem Punkt der Strömung null ist, dann wird diese als
Wenn der Wirbelvektor Ω(t,
wirbelfreie Strömung (oder Potentialströmung, s. Abschn. IV.4) bezeichnet. Sonst spricht man von
einer Wirbelströmung.
Je nachdem, ob die Strömungsgeschwindigkeit kleiner oder größer als die (lokale) Schallgeschwindigkeit cs ist, spricht man von Unterschall- oder Überschallströmung, entsprechend einer Mach-Zahl
Ma ≡
v
cs
(II.12)
kleiner oder größer als 1.
Wenn das Fluid in Schichten strömt, die sich nicht vermischen, so dass die Stromlinien parallel
zueinander bleiben, wird die Strömung laminar genannt. Im Gegenfall ist die Strömung turbulent.
Literatur
• Feynman [2, 3] Kapitel 39–1
• Guyon et al. [4] Kapitel 3.1, 3.2
• Faber [5] Kapitel 2.4.
II. Geschwindigkeitsfelder in einem kontinuierlichen Medium
13
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
Wie in Kap. I schon diskutiert wurde, sind die Freiheitsgrade zur Charakterisierung einer Strömung
in der Eulerschen Betrachtungsweise Felder . Im Allgemeinen sind fünf Felder nötig: die skalare
Massen- bzw. Teilchendichte, die vektorielle Strömungsgeschwindigkeit, und eine skalare thermodynamische Größe, die mit den restlichen thermodynamischen Größen durch eine Zustandsgleichung
zusammenhängt.
Um die Zeitentwicklungen dieser fünf Felder zu bestimmen, braucht man fünf Gleichungen, die
durch allgemeine Erhaltungssätze geliefert werden. Diese Sätze gelten aber für geschlossene Systeme. Dahingegen stellt ein typischer Bereich in einem strömenden Fluids — abgegrenzt gemäß der
Eulerschen Betrachtungsweise durch eine feste virtuelle Oberfläche — meistens ein offenes System
dar. Um solche offene Systeme systematisch zu behandeln, wird eine durch Reynolds entwickelte
geeignete Formulierung in Abschnitt III.1 dargelegt. Dann wird diese Formulierung zur Massenerhaltung (Abschn. III.2), zum Grundgesetz der Dynamik (Abschn. III.3) und zur Energieerhaltung
(Abschn. III.4) angewendet.
III.1 Reynolds’scher Transportsatz
In diesem Abschnitt wird eine Formel für die substantielle Ableitung einer extensiven Größe
herleitet. Diese Ableitung stellt das geeignete Objekt dar, um die Zeitentwicklung eines sich bewegenden Systems in der Eulerschen Darstellung zu beschreiben.
III.1.1 Geschlossenes System, offenes System
Sei eine beliebige abgeschlossene Oberfläche S, die im Bezugssystem fest bleibt. Eine solche
Oberfläche bzw. das darin eingeschlossene Volumen V wird als „Kontrollfläche“ bzw. „Kontrollvolumen“ bezeichnet.
Das zu den sukzessiven Zeiten t in einer gleichen Kontrollfläche S enthaltene Fluid bildet wegen
des Transports von Materie durch S ein offenes System. Sei Σ das geschlossene System bestehend
aus dem Fluid, das zur Zeit t in V enthalten ist. Zur Zeit t + dt besetzt Σ eine andere Position im
Bezugssystem. In Abb. III.1 kann man drei Gebiete im Raum unterscheiden:
Oberfläche von
Σ zur Zeit t
Oberfläche von Σ
zur Zeit t + dt
2+
-
1
2-
Stromlinien
Abbildung III.1: Zeitentwicklung eines geschlossenen Systems in einer Strömung.
• (1), das gemeinsam zu den Positionen von Σ um t und t + dt ist;
• (2−), das zwischen t und t + dt durch Σ verlassen wurde;
• (2+), das zwischen t und t + dt neu besetzt wird.
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
14
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
III.1.2 Substantielle Ableitung einer extensiven Größe
Sei G (t) eine für das geschlossene System Σ charakteristische extensive Größe. Dieser Größe wird
in jedem Punkt ~r des Raums eine auf die Masseneinheit bezogene intensive Größe g (t, ~r) = d3 G /d3 M
assoziiert. Befindet sich das System zur Zeit t im durch die feste Kontrollfläche S abgegrenzten
Volumen V , so gilt
Z
Z
3
G (t) = g (t, ~r) d M = g (t, ~r) ρ(t, ~r) d3 V ,
(III.1)
V
V
d3 M
mit ρ(t, ~r) = 3 der Massendichte.
d V
Beispielsweise wird der Impuls bzw. die kinetische Energie einer Masse d3 M von Fluid mit der
Geschwindigkeit ~v durch d3 P~ = ~v d3 M bzw. d3 K = v2 d3 M/2 gegeben, so dass die entsprechende
intensive Größe d3 P~ /d3 M = ~v bzw. d3 K/d3 M = v2 /2 ist.
Bemerkung: Diese Beispiele zeigen, dass die Größe G skalar, vektoriell, oder gar ein Tensor beliebiger Stufe sein kann.
Um die substantielle Ableitung DG (t)/Dt von G (t) zu berechnen, muss man die Variation dG
für Σ zwischen t und t + dt bestimmen. Mithilfe der in Abb. III.1 definierten Bereiche (1), (2−),
(2+) ergibt sich
dG = G 1 + G 2+ t+dt − G 1 + G 2− t = dG 1 + dG 2 ,
wobei die Indizes sich auf die jeweiligen Bereiche beziehen, mit
dG 1 = G 1 t+dt − G 1 t ,
dG 2 = G 2+ t+dt − G 2− t .
• dG 1 stellt die durch die Nichtstationarität der Strömung verursachte Änderung von G im
Gebiet (1) dar. Im Limes dt → 0 stimmt der Bereich (1) mit dem Kontrollvolumen V überein:
zur führenden Ordnung gilt also
Z
Z
d
∂
dG (t)
3
3
dt =
g (t, ~r) ρ(t, ~r) d V dt =
g (t, ~r) ρ(t, ~r) d V dt,
(III.2)
dG 1 =
dt
dt V
∂t V
wobei die letzte Gleichung aus der Zeitunabhängigkeit des Kontrollvolumens folgt.
• dG 2 entspricht zum einen dem aus S ausströmenden Fluid (Bereich 2+) und zum anderen der
in S einströmenden Materie (Bereich 2−), d.h. algebraisch dem Fluss von G durch die nach
außen orientierte Oberfläche S.
: -~v
2
d S
|~v| dt
-
Die Menge an der Größe G , die durch ein Oberflächenelement
d2 S in der Zeit dt fließt, gleicht der Menge innerhalb eines
Elementarzylinders der Basis d2 S und der Länge |~v| dt, d.h.
d3 G = g ρ d3 V , mit d3 V = |d2 S~ · ~v| dt, wobei der Vektor d2 S~
normal zum Oberflächenelement ist.
Der Fluss durch die Oberfläche S lautet also
I
I
3
dG 2 =
d G=
g (t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S~ dt.
S
(III.3)
S
Insgesamt geben Gl. (III.2)–(III.3) nach Division durch dt den Reynolds’schen Transportsatz :
Z
I
DG (t)
∂
~
=
g (t, ~r) ρ(t, ~r) d3 V +
(III.4)
g (t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S.
Dt
∂t V
S
Das Interessante an diesem Satz ist folgendes. Die Gesetze der Dynamik gelten für geschlossene
Systeme Σ, und beruhen deshalb auf substantiellen Ableitungen DG /Dt. Der Transportsatz von
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
15
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Reynolds drückt die letzteren durch Größen aus, die sich auf feste Bereiche im Raum beziehen, in
welchen die Materie ein offenes System bildet.
Der erste Term auf der rechten Seite von der Gl. (III.4) stellt eine lokale Ableitung ∂ G /∂t dar,
während der zweite Term konvektiver Natur ist, und dem Fluss von G entspricht.
Bemerkungen:
∗ Im Reynolds’schen Transportsatz (III.4) bezieht sich die Strömungsgeschwindigkeit ~v(t, ~r) auf
ein Bezugssystem, in dem die Kontrollfläche S fest ist.
∗ In der obigen Herleitung wurden die Stetigkeit und Differenzierbarkeit der intensiven Größe g (t, ~r)
und des Geschwindigkeitsfeldes ~v(t, ~r) stillschweigend angenommen. In einigen Strömungen können
Bereiche mit starken Gradienten auftreten, wo die Eigenschaften des Fluids sich über kurze Längen
rasch ändern. Beispiele sind Stoßwellen in Überschallströmungen, oder die Grenzfläche zwischen
zwei unmischbaren Fluiden.
Solche Bereiche werden oft durch Oberflächen modelliert, an denen einige physikalischen Größen
unstetig sein können. Dann müssen diese Unstetigkeiten in der Herleitung eines entsprechenden
Transportsatzes berücksichtigt werden.
III.2 Massen- bzw. Teilchenzahlerhaltung: Kontinuitätsgleichung
Die Masse M bzw. die Teilchenzahl N eines geschlossenen nicht-relativistischen Systems sind
erhalten in der Bewegung des Systems: DM/Dt = 0 bzw. DN/Dt = 0. Dieser Erhaltungssatz
führt mit dem Reynolds’schen Transportsatz zu einer ersten Differentialgleichung für die für eine
Strömung charakteristischen Felder.
III.2.1 Integrale Formulierungen
Der Reynolds’sche Transportsatz mit G = M , entsprechend g (t, ~r) = 1, lautet für eine beliebige
Kontrollfläche S:
Z
I
DM (t)
∂
(III.5)
=
ρ(t, ~r) d3 V +
ρ(t, ~r)~v(t, ~r) · d2 S~ = 0,
Dt
∂t V
S
d.h. die Summe der Zeitableitung von der in V enthaltenen Masse und des Massenstroms durch S
verschwindet. Dabei ist ρ(t, ~r)~v(t, ~r) die Massenstromdichte.
Für G = N , d.h. g (t, ~r) = N/M , ergibt sich gleichfalls
I
Z
DN (t)
∂
3
=
n (t, ~r) d V +
n (t, ~r)~v(t, ~r) · d2 S~ = 0,
(III.6)
Dt
∂t V
S
M
wobei ρ(t, ~r) =
n (t, ~r) benutzt wurde. n (t, ~r)~v(t, ~r) ist die Teilchenstromdichte.
N
Gleichung (III.5) bzw. (III.6) stellt die integrale Formulierung der Massen- bzw. Teilchenzahlerhaltung dar.
Bemerkung: Im Fall einer stationären Strömung zeigt Gl. (III.5), dass der Massenstrom durch
eine beliebige Kontrollfläche S null ist, d.h. der in ein Kontrollvolumen einströmende Massenstrom
muss dem aus dem Kontrollvolumen ausströmenden Massenstrom gleich sein.
III.2.2 Lokale Formulierungen
Das Kontrollvolumen V in Gl. (III.5) bzw. (III.6) ist fest, so dass die Zeitableitung in das Integral
eingezogen werden kann. Außerdem kann das Oberflächenintegral mit dem Gaußschen Satz in ein
Volumenintegral umgewandelt werden, was führt zu
Z ∂ρ(t, ~r) ~ + ∇ · ρ(t, ~r)~v(t, ~r) d3 V = 0,
∂t
V
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
16
N.BORGHINI
bzw.
Hydrodynamik
Z V
Theoretische Physik IV
3
∂ n (t, ~r) ~ + ∇ · n (t, ~r)~v(t, ~r) d V = 0.
∂t
Da diese Integrale für ein beliebig kleines Volumen V gelten, lassen sich die folgenden entsprechenden Kontinuitätsgleichungen herleiten:
∂ρ(t, ~r) ~ + ∇ · ρ(t, ~r)~v(t, ~r) = 0
∂t
(III.7)
bzw.
∂ n (t, ~r) ~ + ∇ · n (t, ~r)~v(t, ~r) = 0.
(III.8)
∂t
Gleichung (III.7) bzw. (III.8) stellt die erste der 5 nötigen (partiellen Differential-)Gleichungen
zur Beschreibung der Zeitentwicklung einer Strömung dar.
Bemerkungen:
∗ Die Form der Kontinuitätsgleichung (III.7) ist unabhängig davon, ob das strömende Fluid ideal
oder dissipativ ist.
~ · ρ(t, ~r)~v(t, ~r) = 0, d.h.
∗ In einer stationären Strömung lautet Gl. (III.7) ∇
~ · ~v(t, ~r) +~v(t, ~r) · ∇ρ(t,
~
ρ(t, ~r) ∇
~r) = 0,
~
~ ·~v(t, ~r) = 0, vgl.
so dass ein homogenes Fluid [∇ρ(t,
~r) = ~0] sich wie ein inkompressibles Fluid [∇
Gl. (II.10)] benimmt.
∗ Ähnlich der obigen Herleitung kann man den Reynolds’schen Satz (III.4) für eine skalare extensive
Größe G allgemein als
Z 3
∂ g (t, ~r) ~ DG (t)
=
+ ∇ · g (t, ~r)~v(t, ~r) d V
Dt
∂t
V
umschreiben. Wenn die Größe G in der Bewegung erhalten bleibt, DG /Dt = 0, dann führt dies zur
lokalen Formulierung des Erhaltungssatzes
∂ g (t, ~r) ~ + ∇ · g (t, ~r)~v(t, ~r) = 0,
(III.9)
∂t
wobei g (t, ~r)~v(t, ~r) die Stromdichte der Größe G ist. Gleichung (III.9) stellt die allgemeine lokale
Form eines Erhaltungssatzes dar.
III.3 Impulssatz: Euler-Gleichung, Navier–Stokes-Gleichung
Für ein geschlossenes System mit dem Gesamtimpuls P~ lautet das Grundgesetz der Dynamik
DP~ (t)
= F~ (t),
Dt
(III.10)
mit F~ der Summe der äußeren Kräfte, die auf das System wirken. Hiernach wird zunächst das linke
Glied dieses Gesetzes mithilfe des Reynolds’schen Transportsatzes umgeschrieben (Abschn. III.3.1).
Dann werden verschiedene Forme für die äußeren Kräfte betrachtet, entsprechend den Modellen des
idealen Fluids (Abschn. III.3.2) und des Newtonschen Fluids (Abschn. III.3.3).
III.3.1 Substantielle Ableitung des Impulses
Nach dem Reynolds’schen Satz (III.4) lautet die linke Seite der Gl. (III.10):
Z
I
DP~ (t)
∂
~
~v(t, ~r) ρ(t, ~r) d3 V + ~v(t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S.
=
Dt
∂t V
S
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
(III.11)
17
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Das Kontrollvolumen V ist fest im Bezugssystem, so dass die Zeitableitung des ersten Terms in
das Integral eingezogen werden kann; dann ist die Zeitableitung des Produkts ρ(t, ~r)~v(t, ~r) durch
die übliche Formel gegeben. Außerdem kann man zeigen, dass der zweite Term der rechten Seite in
Gl. (III.11) als
I
Z
∂ρ(t, ~r)
~ ~v(t, ~r)
~v(t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S~ = dV −~v(t, ~r)
+ ρ(t, ~r) ~v(t, ~r) · ∇
(III.12)
∂t
S
V
umgeschrieben werden kann. Insgesamt gilt also
Z
Z
DP~ (t)
∂~v(t, ~r) ~ ~v(t, ~r) d3 V = ρ(t, ~r) D~v(t, ~r) d3 V .
= ρ(t, ~r)
+ ~v(t, ~r) · ∇
Dt
∂t
Dt
V
V
(III.13)
I
~ ≡ ~v(t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S.
~ Für die Komponente i gibt der
Beweis von Gl. (III.12): es sei J(t)
S
Divergenzsatz
I
Z
~ · vi (t, ~r) ρ(t, ~r)~v(t, ~r) d3 V .
Ji (t) =
vi (t, ~r) ρ(t, ~r)~v(t, ~r) · d2 S~ = ∇
S
V
~ · ρ(t, ~r)~v(t, ~r) + ρ(t, ~r)~v(t, ~r) · ∇v
~ i (t, ~r), worin die Divergenz
Der Nabla-Operator gibt vi (t, ~r) ∇
im ersten Term mithilfe der Kontinuitätsgleichung (III.7) durch minus der Zeitableitung der
Massendichte ersetzt werden kann:
~ vi (t, ~r).
~ · vi (t, ~r) ρ(t, ~r)~v(t, ~r) = −vi (t, ~r) ∂ρ(t, ~r) + ρ(t, ~r) ~v(t, ~r) · ∇
∇
∂t
~ was zu Gl. (III.12) führt.
Diese Gleichung gilt für die drei Komponenten von J,
Bemerkung: Die Herleitung der Gl. (III.13) ist rein kinematisch, und beruht deshalb nicht auf den
Eigenschaften des Fluids oder der Strömung. Insbesondere spielt es keine Rolle, ob das Fluid ideal
oder viskos ist.
III.3.2 Ideales Fluid: Euler-Gleichung
In diesem Paragraph werden zunächst die äußeren Kräfte auf ein Fluidelement im Modell des
idealen Fluids betrachtet. Daraus wird eine lokale Formulierung des Impulssatzes abgeleitet
III.3.2
a Äußere Kräfte in einem idealen Fluid
:::::::::::::::::::::::::::::::::::::::::::::
Die auf der rechten Seite der Gl. (III.10) auftretenden äußeren Kräfte bestehen aus Volumenund Oberflächenkräfte:
I
Z
3
~
~
(III.14)
F (t) = fV (t, ~r) d V + ~τs (t, ~r) d2 S,
S
V
mit f~V der Kraftdichte und ~τs der in Gl. (I.3) eingeführten mechanischen Spannung. Für ein ideales
Fluid ist die letztere definitionsgemäß in jedem Punkt normal zum Oberflächenelement, auf welches
die Oberflächenkraft wirkt, auch wenn das Fluid strömt. Somit gilt
~τs (t, ~r) = −P (t, ~r)~en (~r),
(III.15)
mit P (t, ~r) dem Druck und ~en (~r) dem auswärts gerichteten normalen Einheitsvektor zur Oberfläche
im Punkt ~r. Dementsprechend lautet der Spannungstensor
~
~σ(t, ~r) = −P (t, ~r) ~~1,
(III.16)
bzw. σij (t, ~r) = −P (t, ~r) δij , wie in einem ruhenden Fluid.
Der Beitrag der Oberflächenkräfte in Gl. (III.14) läßt sich dann mithilfe des Divergenzsatzes
berechnen:
I
I
I
Z
2
2
2~
~ P (t, ~r) d3 V .
(III.17)
~τs (t, ~r) d S = − P (t, ~r)~en (~r) d S = − P (t, ~r) d S = − ∇
S
S
S
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
V
18
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkung: In Gl. (III.16) wurde stillschweigend angenommen, dass die mikroskopischen Eigenschaften des Fluids in jedem Punkt isotrop sind, d.h. keine bevorzugte Richtung aufweisen. Im
Rest dieser Vorlesung wird diese Annahme immer gemacht. Für einige Fluide, insbesondere für
Flüssigkristalle in unterschiedlichen Phasen, kann diese Annahme nicht gerechtfertigt sein.
III.3.2
b Euler-Gleichung
:::::::::::::::::::::::::
Insgesamt geben die Gl. (III.10), (III.13), (III.14) und (III.17) den Impulssatz
Z h
Z
i
∂~v(t, ~r) ~ ~v(t, ~r) d3 V =
~ P (t, ~r) + f~V (t, ~r) d3 V .
ρ(t, ~r)
−∇
+ ~v(t, ~r) · ∇
∂t
V
V
Diese Gleichung muss für ein beliebig kleines Volumen V gelten, was zur Identität der Integranden
auf den beiden Seiten führt, d.h. zur Euler-Gleichung
∂~v(t, ~r) ~
~ P (t, ~r) + f~V (t, ~r).
ρ(t, ~r)
(III.18)
+ ~v(t, ~r) · ∇ ~v(t, ~r) = −∇
∂t
Bemerkungen:
∗ Der Term in geschweiften Klammern auf der linken Seite der Euler-Gleichung ist genau die
Beschleunigung (II.3), wie im zweiten Newtonschen Gesetz.
~ v ist die Euler-Gleichung eine nichtlineare partielle Differen∗ Wegen des konvektiven Terms (~v · ∇)~
tialgleichung, die dreien Gleichungen zwischen Strömungsgeschwindigkeit, Massendichte und Druck
entspricht.
∗ Neben dem Grundgesetz der Dynamik (III.10) gilt auch der Drehimpulssatz . In Abwesenheit
von „Volumendrehmomenten“ führt die Drehimpulserhaltung zur Symmetrie des Spannungstensors
~~σ = ~~σT , d.h.
σij = σji , ∀i, j = 1, 2, 3.
(III.19)
Diese Bedingung wird im Spannungstensor (III.16) automatisch erfüllt, und wird hiernach im Ausdruck (III.28a) des Spannungstensors in einem Newtonschen Fluid ebenfalls berücksichtigt.
III.3.2
c Randbedingungen
::::::::::::::::::::::::::
Um das mathematische Problem völlig zu formulieren, muss man auch Randbedingungen festlegen. Diese werden durch die Geometrie des Problems bestimmt.
• Weit von einem Hindernis wird der Strömungsgeschwindigkeit eine gegebene Struktur zugeordnet, wie beispielsweise eine gleichförmige Strömung (vgl. die Strömung weit vom Zylinder
in Abb. IV.3 zum Magnus-Effekt).
• Bei einem Hindernis bzw. bei Wänden muss die normale Komponente der (relativen, falls das
Hindernis sich bewegt) Strömungsgeschwindigkeit verschwinden — d.h. das Fluid kann nicht
in das Hindernis bzw. in die Wände einströmen!
Für die tangentielle Komponente gibt es im Gegenteil im Modell des idealen Fluids keine
physikalisch bedingte Randbedingung. Dies entspricht der Reibungslosigkeit des „trockenen“
idealen Fluids.
III.3.2
d Alternative Formen der Euler-Gleichung
::::::::::::::::::::::::::::::::::::::::::::::::
Die Volumenkräfte sind oft proportional zur Masse, z.B. die Schwerkraft oder die Coriolis- oder
Zentrifugalkraft, was zur Einführung einer Kraftdichte pro Masseneinheit führt:
~g (t, ~r) ≡
d3 F~V (t)
f~V (t, ~r)
=
.
d3 M
ρ(t, ~r)
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
19
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Dann kann die Euler-Gleichung (III.18) umgeschrieben werden als
1 ~
D~v(t, ~r)
=−
∇P (t, ~r) + ~g (t, ~r).
Dt
ρ(t, ~r)
(III.20)
Eine andere Formulierung der Euler-Gleichung ergibt sich unter Verwendung der Identität (der
Kürze halber wird die Zeit- und Ortsabhängigkeit des Geschwindigkeitsfeldes nicht geschrieben)
2
~v
~ ~v,
~
~
~v × ∇ ×~v = ∇
− ~v · ∇
2
die sich entweder aus der üblichen Formel für das doppelte Kreuzprodukt oder komponentenweise
einfach beweisen läßt. Dann gibt Gl. (III.20)
∂~v(t, ~r) ~ ~v(t, ~r)2
~ ~r) = − 1 ∇
~ P (t, ~r) + ~g (t, ~r),
− 2~v(t, ~r) × Ω(t,
(III.21)
+∇
∂t
2
ρ(t, ~r)
wobei der Wirbelvektor (II.6) benutzt wurde. Man erkennt im zweiten Term auf der linken Seite
die kinetische Energie pro Masseneinheit d3 K/d3 M .
Später wird gezeigt (Abschn. VI.1.4 b), dass die Entropie eines strömenden idealen Fluids erhalten ist, was zur Erhaltung der Entropie pro Teilchen führt. Aus der Letzteren folgt dann (s.
Abschn. IV.1.3) die Identität
w(t, ~r)
1
d
=
dP (t, ~r),
ρ(t, ~r)
ρ(t, ~r)
mit w der Enthalpiedichte des Fluids. Deshalb kann der Druckterm auf der rechten Seite der
Gl. (III.21) durch den Gradienten des Verhältnisses w/ρ ersetzt werden:
∂~v(t, ~r) ~ ~v(t, ~r)2
w(t, ~r)
~
~
+∇
− 2~v(t, ~r) × Ω(t, ~r) = −∇
+ ~g (t, ~r).
(III.22)
∂t
2
ρ(t, ~r)
III.3.2
e Die Euler-Gleichung als Bilanzgleichung
:::::::::::::::::::::::::::::::::::::::::::::::
Die Euler-Gleichung kann als eine Bilanzgleichung für die Impulsdichte umgeschrieben werden,
ähnlich der allgemeinen Form (III.9), mit einem rechten Glied entsprechend einer „Impulsquelle“.
Definitionen: Der Komponente i des Impulses werden
• die Impulsdichte ρ(t, ~r) vi (t, ~r) und
(III.23a)
• die Impulsstromdichte (in die Richtung j) πij (t, ~r) ≡ P (t, ~r) δij + ρ(t, ~r) vi (t, ~r) vj (t, ~r) (III.23b)
zugeordnet. Dabei stellt der erste Term in πij den Transport in die Richtung j von Impuls durch
die thermische Bewegung der Moleküle des Fluids dar, während der zweite Term dem konvektiven
Transport durch die makroskopische Strömung entspricht.
Die Euler-Gleichung (III.18) ist äquivalent zu den Bilanzgleichungen (i = 1, 2, 3)
3
X ∂πij (t, ~r)
∂
= f~V (t, ~r).
ρ(t, ~r) vi (t, ~r) +
∂t
∂xj
(III.24)
j=1
Beweis: Der Kürze halber wird die (t, ~r)-Abhängigkeit nicht geschrieben. Dann kommt
3
3
3
X
∂(ρvi ) X ∂πij
∂ρ
∂vi
∂P
∂(ρvj ) X
∂vi
+
=
vi + ρ
+
+
vi
+
ρvj
∂t
∂x
∂t
∂t
∂x
∂x
∂x
j
i
j
j
j=1
j=1
j=1
∂ρ ~
∂vi
~ i + ∂P .
= vi
+ ∇ · (ρ~v) + ρ
+ (~v · ∇)v
∂t
∂t
∂xi
Der erste Term in eckigen Klammern verschwindet dank der Kontinuitätsgleichung (III.7), während der zweite Term gerade die Komponente i der linken Seite der Euler-Gleichung (III.18)
darstellt, d.h. gleich f~V minus dem dritten Term ist.
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
20
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkungen:
∗ Da die thermische Bewegung eine „ungerichtete“ Bewegung ist, trägt sie nicht zur Impulsdichte
ρ(t, ~r)~v(t, ~r) bei, sondern nur zur Impulsstromdichte.
∗ In tensorieller Schreibweise lautet die Impulsstromdichte (III.23b)
~~π(t, ~r) = P (t, ~r)~
~1 + ρ(t, ~r)~v(t, ~r) ⊗~v(t, ~r) = ρ(t, ~r)~v(t, ~r) ⊗~v(t, ~r) − ~~σ(t, ~r),
(III.25)
mit ~~σ(t, ~r) dem Spannungstensor (III.16).
III.3.3 Nicht-ideales Fluid: Navier–Stokes-Gleichung
In einem bewegten realen Fluid gibt es Reibungskräfte, die zum Transport von Impuls zwischen
benachbarten Fluidschichten beitragen, wenn diese Schichten unterschiedliche Geschwindigkeiten
haben. Dementsprechend ist die Impulsstromdichte nicht mehr durch Gl. (III.23b) oder Gl. (III.25)
gegeben, sondern enthält zusätzliche Terme. Somit soll die Euler-Gleichung ersetzt werden.
III.3.3
a Impulsstromdichte eines Newtonschen Fluids
::::::::::::::::::::::::::::::::::::::::::::::::::::
Die Impulsstromdichte (III.23b) des idealen Fluids — mit einem Term proportional zu δij und
einem anderen proportional zu vi (t, ~r) vj (t, ~r) — stellt die allgemeinste mögliche Form eines symmetrischen isotropen Tensors zweiter Stufe dar, der mit der Strömungsgeschwindigkeit konstruiert
werden kann. Erlaubt man noch Terme, die von den räumlichen Ableitungen des Geschwindigkeitsfeldes abhängen, so kann die Impulsstromdichte der folgenden Form sein (der Kurze halber sind die
t und ~r Variablen nicht geschrieben)
∂v
∂vj
∂vi
2 ~
∂v
j
i
0
~ ·~v − ζ
πij = P δij + ρvi vj − η
+
− δij ∇ ·~v − ζδij ∇
−
∂xj
∂xi 3
∂xi ∂xj
2 !
∂vi
∂ 2 vi
,
+O
+ ··· ,
(III.26)
∂xj ∂xk ∂xj
wobei η, ζ und ζ 0 Eigenschaften des Fluids sind. Dabei stellt der ζ 0 -Term einen antisymmetrischen
Beitrag zu πij dar, der verschwindet, wenn kein äußeres Volumendrehmoment auf das Fluid wirkt,
entsprechend der Erhaltung des Drehimpulses.
Gemäß der Diskussion in Abschn. I.1 beruht die Beschreibung eines Fluids als ein kontinuierliches
Medium im lokalen thermodynamischen Gleichgewicht auf der Annahme, dass die für das Medium
charakteristische makroskopischen Größen nur langsam im Raum variieren. Dementsprechend sollen
Gradienten klein sein: der dritte und der vierte Term in Gl. (III.26) sollen einerseits viel kleiner
als die zwei ersten, andererseits viel größer als die Terme mit zwei oder mehr Ableitungen sein.
Vernachlässigt man die Letzteren, so erhält man die „dissipative Fluiddynamik erster Ordnung“, die
definitionsgemäß die Strömung von Newtonschen Fluiden beschreibt, mit der Impulsstromdichte
πij (t, ~r) = P (t, ~r) δij + ρ(t, ~r)vi (t, ~r)vj (t, ~r)
∂vi (t, ~r) ∂vj (t, ~r) 2 ~
~ ·~v(t, ~r),
− η(t, ~r)
+
− δij ∇ ·~v(t, ~r) − ζ(t, ~r)δij ∇
∂xj
∂xi
3
(III.27a)
oder, in tensorieller Schreibweise
~
1
~
~~π(t, ~r) = P (t, ~r)~
~
~
~ ·~v(t, ~r) ~
~1 + ρ(t, ~r)~v(t, ~r) ⊗~v(t, ~r) − 2η(t, ~r) D(t, ~r) − ∇ ·~v(t, ~r) ~1 − ζ(t, ~r) ∇
~1,
3
(III.27b)
~~
mit D(t, ~r) dem Verzerrungstensor [Gl. (II.5)].
Dabei treten zwei neue Transportkoeffizienten auf:
• die (dynamische) Scherviskosität η, multipliziert mit einem spurlosen symmetrischen Tensor;
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
21
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
• die Dehnviskosität (auch Volumenviskosität oder zweite Viskosität genannt) ζ, multipliziert
mit einem Tensor proportional zur Identität.
Die zugehörigen Terme in der zweiten Zeile von Gl. (III.27a) stellen einen diffusiven Transport vom
Impuls dar.
Bemerkungen:
∗ Im Fall eines Newtonschen Fluids sind die Viskositätskoeffizienten η und ζ unabhängig von der
Strömungsgeschwindigkeit; dennoch hängen sie von der Temperatur und dem Druck ab, so dass sie
nicht unbedingt konstant im strömenden Fluid sind.
~ ·~v(t, ~r) = 0, verschwindet der letzte Beitrag zur Impuls∗ In einer inkompressiblen Strömung, ∇
stromdichte (III.27). Somit spielt die Dehnviskosität ζ nur für kompressible Strömungen eine Rolle,
wie deren Bezeichnung suggeriert.5
∗ Der Ausdruck (III.27) der Impulsstromdichte setzt implizit die Isotropie des Fluids voraus, da
die Koeffizienten η, ζ unabhängig von den Richtungen i, j sind.
III.3.3
b Oberflächenkräfte in einem Newtonschen Fluid
::::::::::::::::::::::::::::::::::::::::::::::::::::::
Die Impulsstromdichte (III.27b) für ein nicht-ideales Newtonsches Fluid liefert den Spannungstensor [vgl. (III.25)]
~~σ(t, ~r) = ρ(t, ~r)~v(t, ~r) ⊗~v(t, ~r) − ~~π(t, ~r)
~
1
~
~
~ ·~v(t, ~r) ~1 + ζ(t, ~r) ∇
~ ·~v(t, ~r) ~~1, (III.28a)
= −P (t, ~r)~1 + 2η(t, ~r) ~D(t, ~r) − ∇
3
oder komponentenweise
2
∂vi (t, ~r) ∂vj (t, ~r)
~
+
σij (t, ~r) = − P (t, ~r) + ζ(t, ~r) − η(t, ~r) ∇ ·~v(t, ~r) δij + η(t, ~r)
. (III.28b)
3
∂xj
∂xi
Dementsprechend lautet die mechanische Spannung auf ein ruhendes infinitesimal kleines Flächenelement, das senkrecht auf den Einheitsvektor ~en (~r) in einem Punkt ~r liegt
3 X
2
~ ·~v(t, ~r) δij
~σ(t, ~r) · ~en (~r) =
~τs (t, ~r) = ~
− P (t, ~r) + ζ(t, ~r) − η(t, ~r) ∇
3
i,j=1
∂vi (t, ~r) ∂vj (t, ~r)
+ η(t, ~r)
+
nj (~r)~ei , (III.29)
∂xj
∂xi
mit nj (~r) ≡ ~en (~r) · ~ej der Komponente von ~en (~r) in Richtung j. Dabei erkennt man zwei Teile:
P
• der Term proportional zu
δij nj~ei = ~en ist die Normalspannung auf das Flächenelement,
~ ·~v besteht: in der
die aus dem üblichen Druckterm −P ~en und einem Term proportional zu ∇
kompressiblen Strömung eines viskosen Fluids ist die Normalspannung also nicht durch −P ~en
gegeben, sondern enthält einen zusätzlichen Term, der für ein ruhendes Fluid verschwindet.
Deshalb wird P oft hydrostatischer Druck genannt.
• der Restterm ist die Tangentialspannung, die proportional zur Scherviskosität η ist. Daher liefert die Messung der Tangentialkraft auf ein Oberflächenelement den Wert der Scherviskosität,
s. Abschnitt V.1.2.
Der Spannungstensor (III.28a) lautet noch ~~σ(t, ~r) = −P (t, ~r)~~1 + ~~τ(t, ~r), wobei
2
~
~
~
~ ·~v(t, ~r)~~1
~τ(t, ~r) ≡ 2η(t, ~r) D(t, ~r) + ζ(t, ~r) − η(t, ~r) ∇
(III.30)
3
als viskoser Spannungstensor bezeichnet wird.
5
Infolgedessen ist die Dehnviskosität oft schwierig zu messen, und daher für viele Substanzen nicht gut bekannt [7].
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
22
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Ähnlich wie in Abschn. III.3.2 a können jetzt die äußeren Oberflächenkräfte auf ein durch die
Oberfläche S abgegrenztes Fluidelement berechnet werden. Somit liefert der Stokes’sche Integralsatz
Z
Z
I
I
I
2
3
2
2
~
~
~ · ~~τ (t, ~r) d3 V
~τs (t, ~r) d S = − P (t, ~r)~en (~r) d S + ~τ(t, ~r) · ~en (~r) d S = − ∇P (t, ~r) d V + ∇
V
V
S
ZS
Z S
3
3
~ P (t, ~r) d V + f~Viskosität (t, ~r) d V ,
=− ∇
(III.31a)
V
V
mit der lokalen Reibungskraft
3
X
∂v
(t,
~
r
)
∂
∂v
(t,
~
r
)
2
j
i
~ ζ(t, ~r) − η(t, ~r) ∇
~ ·~v(t, ~r) .
f~Viskosität (t, ~r) =
η(t, ~r)
+
~ej + ∇
∂xi
∂xj
∂xi
3
i,j=1
(III.31b)
III.3.3
c Navier–Stokes-Gleichung
:::::::::::::::::::::::::::::::::
Kombiniert man die oben hergeleitete viskose Kraft (III.31b) kann mit Gl. (III.10), (III.13) und
(III.14), so gibt der Impulssatz für ein Volumen V von Fluid eine Identität zwischen Summen von
Volumenintegralen. Da diese Gleichung für beliebiges V gelten soll, gilt die entsprechende Identität
der Integranden
∂~v(t, ~r) ~ ~v(t, ~r) = −∇
~ P (t, ~r) + f~Viskosität (t, ~r) + f~V (t, ~r)
+ ~v(t, ~r) · ∇
ρ(t, ~r)
(III.32a)
∂t
oder Komponentenweise
∂ P (t, ~r)
∂
2
∂vi (t, ~r) ~
~
+ ~v(t, ~r) · ∇ vi (t, ~r) = −
+
ζ(t, ~r) − η(t, ~r) ∇ ·~v(t, ~r)
ρ(t, ~r)
∂t
∂xi
∂xi
3
3
X ∂
∂vi (t, ~r) ∂vj (t, ~r)
+
η(t, ~r)
+
+ f~V (t, ~r) i
∂xj
∂xj
∂xi
j=1
(III.32b)
für i = 1, 2, 3.
Sind die (impliziten) Zeit- und Ortsabhängigkeit der Viskositätskoeffizienten venachlässigbar, so
können η und ζ aus den Ableitungen herausgezogen werden. Damit ergibt sich die (kompressible)
Navier–Stokes-Gleichung
η
∂~v(t, ~r) ~ ~v(t, ~r) = −∇
~ P (t, ~r) + η4~v(t, ~r) + ζ +
~ ∇
~ ·~v(t, ~r) + f~V (t, ~r).
ρ(t, ~r)
+ ~v(t, ~r) · ∇
∇
∂t
3
(III.33)
Es handelt sich dabei um eine nicht-lineare partielle Differentialgleichung zweiter Ordnung, während
die Euler-Gleichung (III.18) erster Ordnung ist.
Im Fall einer inkompressiblen Strömung vereinfacht sich Gl. (III.33) zur inkompressiblen Navier–
Stokes-Gleichung
∂~v(t, ~r) ~ ~v(t, ~r) = − 1 ∇
~ P (t, ~r) + ν4~v(t, ~r),
+ ~v(t, ~r) · ∇
(III.34)
∂t
ρ
mit ν ≡ η/ρ der kinematischen Scherviskosität.6
Bemerkung: Nimmt man als Anfangspunkt einen Spannungstensor mit Termen zweiter Ordnung in
den Raumableitungen, entsprechend dem Term der zweiten Zeile in der Impulsstromdichte (III.26),
anstatt des Spannungstensors (III.28), so erhält man statt der Navier–Stokes-Gleichung eine partielle Differentialgleichung höherer Ordnung, die Burnett-Gleichung [8]. Der Gültigkeitsbereich jener
Während die Dimension der dynamischen Viskosität ML−1 T−1 ist — entsprechend im SI-Einheitensystem dem
Poiseuille (Pa·s) —, ist die Dimension der kinematischen Viskosität L2 T−1 , die also nur von Ort und Zeit abhängt,
woraus die Bezeichnung folgt.
6
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
23
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
„dissipativen Fluiddynamik zweiter Ordnung“ ist zwar theoretisch größer, da sie prinzipiell stärkere
Gradienten berücksichtigen kann, doch die numerische Implementierung kann ziemlich involviert
sein, so dass eine rein makroskopische Beschreibung nicht unbedingt den besten Ansatz darstellt.
III.3.3
d Randbedingungen
:::::::::::::::::::::::::::
An der Grenzoberfläche zwischen einem viskosen Fluid und einem anderen Körper — sei es
ein Hindernis in der Strömung, eine Wand des Behälters, in dem das Fluid strömt, oder gar ein
anderes viskoses Fluid, das mit dem ersten nicht mischbar ist — muss die Relativgeschwindigkeit
des Fluids bezüglich des Körpers verschwinden. Dies gilt sowohl für die Normal- als auch für die
Tangentialkomponente der Relativgeschwindigkeit, nicht nur für die Normalkomponente wie im Fall
eines idealen Fluids.
III.4 Energieerhaltung und Entropiebilanz
Als fünfte Gleichung, um ein geschlossenes System von Gleichungen für die gekoppelten Entwicklungen von ρ(t, ~r), ~v(t, ~r) und P (t, ~r) zu erhalten, gibt es in der nicht-relativistischen Fluiddynamik
verschiedene Möglichkeiten.
Eine erste mögliche Gleichung ist eine Beziehung zwischen Druck und Massen- bzw. Teilchendichte im Fluid, d.h. eine sogennante „adiabatische Zustandsgleichung“, die zusammen mit der „thermischen“ Zustandsgleichung P = f (e, ρ) eine zweite Relation zwischen den thermodynamischen
Größen bildet, wobei e die inneren Energiedichte bezeichnet.
Beispielsweise gilt für die adiabatischen Zustandsänderungen eines idealen Gases neben der thermischen Zustandsgleichung PV = N kB T auch die Beziehung PV γ = Konstante, mit γ dem Verhältnis
der Wärmekapazitäten bei konstantem Druck (CP ) und konstantem Volumen (CV ) des Gases.
Eine zweite Möglichkeit ist, die aus der Energieerhaltung resultierende Gleichung zu benutzen.
Dabei setzt die Energiebilanz die Zeitableitung der Gesamtenergie — bestehend aus innerer und
kinetischer Energie — in einem Volumen mit minus dem Energiefluss durch die Oberfläche, die das
Volumen abgrenzt, gleich.
III.4.1 Energiebilanz in idealen Fluiden
In idealen Fluiden trägt nur konvektiver Energietransport zum Energiefluss bei, d.h. der Transport einer bewegten Fluidmasse durch die Oberfläche. Dies führt zu7
∂ 1
1
2
2
~
ρ(t, ~r)~v(t, ~r) + e(t, ~r) + ∇ ·
ρ(t, ~r)~v(t, ~r) + e(t, ~r) + P (t, ~r) ~v(t, ~r) = 0,
(III.35)
∂t 2
2
mit e der inneren Energiedichte; e + P im zweiten Term ist die Enthalpiedichte w.
Bemerkung: Diese lokale Form der Energieerhaltung ist deutlich der allgemeinen Form (III.9),
wobei die thermische Bewegung zur Energiestromdichte, nicht aber zur Energiedichte, durch den
Druck beiträgt, ähnlich wie bei der Impulsbilanz.
Man kann zeigen — dies wird in Abschn. VI.1.4 b über relativistische Fluiddynamik sowie als
besonderer Fall in Abschn. III.4.3 bewiesen —, dass in einem idealen, nicht-dissipativen Fluid, die
lokale Energiebilanz (III.35) zur lokalen Erhaltung der Entropie führt, die sich als
∂s(t, ~r) ~ + ∇ · s(t, ~r)~v(t, ~r) = 0,
(III.36)
∂t
ausdrücken lässt, mit s(t, ~r) der Entropiedichte und s(t, ~r)~v(t, ~r) der Entropiestromdichte. In diesem
Fall ist die Strömung isentropisch. Als letzte Gleichung zur Beschreibung der Strömung eines idealen
Fluids ist diese Gleichung manchmal günstiger zu verwenden, als die Energiebilanz (III.35).
7
Diese Gleichung wird später in Abschn. VI.2 über den nichtrelativistischen Limes von relativistischer Fluiddynamik hergeleitet.
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
24
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
III.4.2 Energiebilanz in Newtonschen Fluiden
In einem realen Fluid kann Energie nicht nur konvektiv transportiert werden, sondern es gibt
weitere Transportarten:
• Die Viskosität des Fluids, die zum Impulstransport beiträgt, führt auch zu einem diffusiven
Transport von Energie zwischen
P Fluidschichten mit unterschiedlichen Geschwindigkeiten. Dies
wird durch einen Beitrag − j τij vj zum Strom in Richtung i der Energiedichte berücksichtigt,
mit τij dem viskosen Spannungstensor (III.30).
• In realen Fluiden wird auch Energie aus Bereichen mit höherer Temperatur nach denen mit
niedrigerer Temperatur transportiert, entsprechend Wärmeleitung. Die Letztere lässt sich
~ (t, ~r) (laut der lokalen Formulierung
durch einen Wärmestromvektor ~Q (t, ~r) = −κ(t, ~r) ∇T
8
vom Fourier-Gesetz ) beschreiben, der zur Energiestromdichte beiträgt, mit κ der Wärmeleitfähigkeit des Fluids.
Unter Berücksichtigung dieser weiteren Beiträge lautet die lokale Formulierung der Energieerhaltung
in einem Newtonschen Fluid in Abwesenheit äußerer Volumenkräfte
∂ 1
2
ρ(t, ~r)~v(t, ~r) + e(t, ~r)
∂t 2
1
~ ·
ρ(t, ~r)~v(t, ~r)2 + e(t, ~r) + P (t, ~r) ~v(t, ~r)
+∇
2
(III.37)
~v(t, ~r)2
~
~
− η(t, ~r) ~v(t, ~r) · ∇ ~v(t, ~r) + ∇
2
2η(t, ~r) ~
~
− ζ(t, ~r) −
∇ · ~v(t, ~r) ~v(t, ~r) − κ(t, ~r) ∇T (t, ~r) = 0.
3
Sind die drei Transportkoeffizienten η, ζ und κ Null, so vereinfacht sich diese Energiebilanz zu
Gl. (III.35)
III.4.3 Entropiebilanz in Newtonschen Fluiden
In einem realen Fluid mit nicht-verschwindenden Viskosität und Wärmeleitfähigkeit kann man
erwarten, dass die Umwandlung mechanischer Energie in Wärme zu einer Zunahme der Entropie
führt, vorausgesetzt, dass das Fluid ein geschlossenes System bildet.
Sei ein durch die Oberfläche S abgegrenztes Volumen V von strömendem Fluid mit den Randbedingungen ~v(t, ~r) ·~en (~r) = 0 und ~Q (t, ~r) ·~en (~r) = 0 in jedem Punkt ~r der Oberfläche, wobei ~en (~r)
den Normaleinheitsvektor zu S in ~r bezeichnet. Diese Randbedingungen bedeuten, dass keine Materie bzw. keine Wärme durch die Oberfläche S strömt, d.h. das System innerhalb S ist geschlossen
und isoliert.
Der Kürze halber werden die Variablen t, ~r in der folgenden Herleitung nicht geschrieben.
∂ 1 2
1
2
~ ·
In den zwei ersten Zeilen der Gl. (III.37) können die Termen
ρ~v + ∇
ρ~v ~v durch
∂t 2
2
3
3
X
i 2 X
∂~v 1 ∂ρ 2 1 h~
∂vi
~
~
~v + ∇ · ρ~v ~v +
ρ~v ·
+
ρvi ~v · ∇ vi =
ρvi
+ ~v · ∇ vi
(III.38a)
∂t 2 ∂t
2
∂t
i=1
i=1
ersetzt werden, wobei die Kontinuitätsgleichung (III.7) benutzt wurde.
Die thermodynamische Beziehung U = T S − PV + µN gibt einerseits e + P = T s + µn , woraus
~ · (e + P )~v = T ∇
~ · s~v + µ∇
~ · n~v +~v · s∇T
~ + n ∇µ
~
∇
~ · s~v + µ∇
~ · n~v +~v · ∇
~P
= T∇
(III.38b)
8
Vgl. z.B. Kapitel 4.12 in [9] oder Kapitel 1.2.1 in [4].
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
25
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
folgt, wobei in der zweiten Zeile die Gibbs–Duhem-Relation dP = s dT + n dµ benutzt wurde, und
führt andererseits zu
de = T ds + µ dn .
Die letztere Gleichung folgt aus
U
1
U
de = d
= dU − 2 dV
V
V
V
T
P
S
P
µ
TS
µN
N
=
dS − dV + dN − 2 dV + dV − 2 dV = T d
+ µd
,
V
V
V
V
V
V
V
V
wobei die Relation dU = T dS − P dV + µ dN benutzt wurde.
Mithilfe der Kontinuitätsgleichung für die Teilchenzahl ergibt sich dann
∂e
∂s
∂n
∂s
~ · n~v .
=T
+µ
=T
− µ∇
∂t
∂t
∂t
∂t
(III.38c)
Unter Nutzung der Gl. (III.38a)–(III.38c) lässt sich die Energiebilanz (III.37) umschreiben als
3
X
∂s
∂vi
~
~ · s~v +~v · ∇
~P =
+ ~v · ∇ vi + T
+ T∇
ρvi
∂t
∂t
i=1
X
3
3
X
∂vj
2 ~
∂
∂vi
∂ ~
~ · κ∇T
~
+
− δij ∇ ·~v vi +
ζ ∇ ·~v vi + ∇
. (III.38d)
η
∂xj
∂xj
∂xi 3
∂xi
i,j=1
i=1
Die Multiplikation der Komponente i der Gleichung (III.32b) mit vi gibt
3
X
∂vj
∂vi
∂P
∂
∂vi
2 ~
∂
~
~ · ~v .
ρvi
+ ~v · ∇ vi + vi
=
vi
η
+
− δij ∇ · ~v
+ vi
ζ∇
∂t
∂xi
∂xj
∂xj
∂xi 3
∂xi
j=1
Zieht man diese Gleichung summiert über i = 1, 2, 3 von Gl. (III.38d) ab, so ergibt sich
3
X
∂vj ∂vi
∂vj
∂s
2 ~
~
~ ·~v 2 + ∇
~ · κ∇T
~
T
+ T ∇ · s~v = η
+
− δij ∇ · ~v + ζ ∇
.
∂t
∂xi ∂xj
∂xi 3
(III.39)
i,j=1
Im rechten Glied dieser Gleichung kann man zunächst die Identität
2
3 3 X
∂vj
∂vj
∂vj
∂vi
1 X ∂vi
2 ~
2 ~
+
− δij ∇ · ~v =
+
− δij ∇ · ~v
2
∂xj
∂xi 3
∂xj
∂xi 3
∂xi
i,j=1
(III.40a)
i,j=1
∂vj
∂vi
einsetzen, da in dem Ausmultiplizieren des Quadrats die symmetrischen Terme
und
den
∂xj
∂xi
9
gleichen Beitrag geben, während der Term in δij null gibt.
Dann gilt
~ κ ~ 2
κ∇T
~
~
~
+
∇T .
∇ · κ∇T = T ∇ ·
T
T
(III.40b)
Schließlich führen die Gl. (III.40) und die Energiebilanz (III.39) zu
~ 2
3 ~ 2
X
2
∇T
∂v
ζ
∂s ~
κ
∇T
η
∂v
2
j
i
~ ·
~ ·~v +
~ ·~v + κ
+ ∇ · s~v − ∇
=
+
− δij ∇
∇
. (III.41)
∂t
T
2T
∂xj ∂xi 3
T
T2
i,j=1
Diese Gleichung kann über das Volumen V integriert werden:
• berechnet man die Integrale der Divergenzen auf der linken Seite mit dem Satz von Stokes, so
verschwinden sie wegen der Randbedingungen an der Oberfläche S;
9
Letzteres folgt aus der „Spurlosigkeit“ des Terms in Klammern.
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
26
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
dS
• der Restterm auf der linken Seite ist die Zeitableitung
der Entropie des geschlossenen
dt
Systems;
• wenn die Transportkoeffizienten η, ζ, κ positiv sind, dann sind die drei Terme auf der rechten
Seite ebenfalls positiv.
Somit findet man
dS
≥ 0, in Übereinstimmung mit dem zweiten Hauptsatz der Thermodynamik.
dt
Bemerkungen:
∗ Man kann die obige Herleitung als einen Beweis betrachten, dass die Transportkoeffizienten
unbedingt positiv sein müssen, damit der zweite Hauptsatz gilt.
∗ Wenn die drei Transportkoeffizienten η, ζ, κ null sind, entsprechend dem Fall eines nichtdissipativen Fluids, vereinfacht sich Gl. (III.41) auf die Entropiebilanz (III.36).
Literatur
• Feynman [2, 3] Kapitel 40–2
• Guyon et al. [4] Kapitel 3.3, 5.1, 5.2
• Landau–Lifschitz [10] Kapitel I, § 1,2 und § 6,7
• Fließbach [11] Kapitel 42.
III. Grundgleichungen der nicht-relativistischen Hydrodynamik
27
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
IV. Strömungen eines idealen Fluids
Dieses Kapitel befasst sich mit einigen Lösungen des Systems von Gleichungen (III.8), (III.18)
und (III.35) für die Bewegung eines idealen Fluids. Dabei wird angenommen, dass die Dichte der
~ r) schreiben läßt, wobei Φ insbesondere
äußeren Volumenkräfte sich als f~V (t, ~r) = −ρ(t, ~r)∇Φ(~
das Gravitationspotential sein kann. Im ganzen Kapitel werden kartesische Koordinaten in einem
gegebenen Bezugssystem benutzt.
IV.1 Hydrostatik
Der einfachste Fall ist jener der statischen Lösungen: ∂/∂t = 0, ~v(~r) = ~0, d.h. es gibt keine
Strömung. Dann geht es um die Hydrostatik , dessen einzige nicht-triviale Grundgleichung ist [vgl.
Gl. (III.18)]
1 ~
~ r).
(IV.1)
∇P (~r) = −∇Φ(~
ρ(~r)
In den folgenden Beispielen wird der Fall eines homogenen Schwerefeldes Φ(~r) = gz angenommen, mit g = 9, 8 m· s−2 .
IV.1.1 Inkompressibles Fluid
Sei zunächst ein inkompressibles Fluid10 mit der konstanten, gleichförmigen Massendichte ρ.
Dann lautet Gl. (IV.1)
∂ P (~r)
∂ P (~r)
∂ P (~r)
=
= 0,
= −ρg,
∂x
∂y
∂z
d.h.
P (~r) = P (z) = P 0 − ρgz,
(IV.2)
mit P 0 dem Druck des Referenzpunkts z = 0.
Bekannterweise gilt z.B. in der Tiefe von 10 m unter Wasser (ρ = 103 kg·m−3 )
P (−10 m) = P (0) + 103 × g × 10 ≈ 2 · 105 Pa.
IV.1.2 Fluid in thermischem Gleichgewicht
Es sei jetzt ein Fluid im thermischen Gleichgewicht, d.h. mit gleichförmiger Temperatur T ,
beispielsweise ein ideales Gas, mit der (thermischen) Zustandsgleichung PV = N kB T . Bezeichnet
m die Masse eines Moleküls des Gases, so gilt ρ = mP /kB T , so dass Gl. (IV.1) gibt
∂ P (~r)
∂ P (~r)
=
= 0,
∂x
∂y
d.h.
∂ P (~r)
mg
=−
p(~r),
∂z
kB T
mgz
P (~r) = P (z) = P 0 exp −
,
kB T
und eine ähnliche Exponentialbeziehung für die Teilchendichte n (~r): für die letztere erkennt man
also die statistische Maxwell-Verteilung.
Beispielsweise gilt für Luft (fiktives ideales Gas mit der molaren Masse NA mLuft = 29 g · mol−1 )
kB T /mLuft g = 8, 8 · 103 m für T = 300 K. Auf einer solchen Skala bleibt die Temperatur der
Atmosphäre aber nicht konstant, s. nächsten Paragraf!
10
Genauer gesagt, ein Fluid, das als inkompressibel betrachtet werden kann.
IV. Strömungen eines idealen Fluids
28
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
IV.1.3 Isentropische Verteilung
Die Entropie pro Teilchen s/n eines strömenden idealen Fluids ist erhalten. Hier wird angenommen, dass s/n auch in einem ruhenden idealen Fluid konstant ist.
Für die Enthalpie H = U + PV des Fluids folgt aus der üblichen thermodynamischen Relation
dU = T dS − P dV + µ dN das Differenzial dH = T dS + V dP + µ dN . Bei konstanter Teilchenzahl
N ergibt sich also
H
S
V
d
= Td
+
dP ,
N
N
N
d.h. nach Division durch die Masse eines Moleküls des Fluids
1
w
= dP ,
d
ρ
ρ
(IV.3)
mit w der Enthalpiedichte.
Zusammen mit Gl. (IV.1) gibt diese Beziehung
w(~r)
~
+ Φ(~r) = ~0
∇
ρ(~r)
(IV.4)
w(z)
+ gz = Konstante.
ρ(z)
d.h.
Für ein ideales diatomares Gas gilt U = 52 N kB T , so dass die Enthalpiedichte durch
5
7
w = e + P = n kB T + n kB T = n kB T
2
2
7 kB T
w
=
, mit m der Masse eines Gasmoleküls. Mit Gl. (IV.4) ergibt sich
gegeben ist. Dann ist
ρ
2 m
dT (z)
mg
=−7 .
dz
2 kB
Im Beispiel der Luft beträgt der Term in der rechten Seite 9, 77 · 10−3 K·m−1 = 9, 77 K·km−1 .
Bemerkung: Im Modell der International Standard Atmosphere (ISA) wird ebenfalls eine lineare
Abnahme der Temperatur mit der Höhe angenommen, aber mit einem niedrigeren Temperaturgradienten von 6, 5 K·km−1 in der Troposphäre, um die mögliche Kondensation von Wasserdampf zu
berücksichtigen.
IV.1.4 Archimedisches Prinzip
Sei ein ruhendes Fluid bzw. System mehrerer Fluide F und eine Kontrollfläche S innerhalb F ,
wie in Abb. IV.1 dargestellt wird. Das System von Fluiden innerhalb bzw. außerhalb S sei als Σ bzw.
F~
S
Fluid 2
Fluid 2
Festkörper
G
Fluid 1
Fluid 1
Abbildung IV.1: Gedankenexperiment zur Berechnung des Archimedischen Prinzips.
IV. Strömungen eines idealen Fluids
29
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
F 0 bezeichnet. Σ befindet sich im mechanischen Gleichgewicht, d.h. die volumischen Schwerkräften
auf jedes infinitesimal kleine Element von Σ und die Druckkräften, die durch die Fluide von F 0
geübt werden, gleichen sich aus:
• Die volumischen Schwerkräfte resultieren in eine einzige Kraft F~G , die auf den Gravitationsschwerpunkt G von Σ angewandt wird, und deren Richtung und Stärke gleich denen der
Gewichtskraft des Systems Σ sind.
• Laut der Gleichgewichtsbedingung ist die Resultante der Druckkräfte gleich −F~G :
I
P (~r) dS~ = −F~G .
S
Wird das System Σ durch einen Festkörper ersetzt, während die Fluide F 0 außerhalb S unverändert im selben Gleichgewichtszustand bleiben, so ändern sich die Druckkräfte in F 0 nicht. Die
Resultante der durch F 0 auf den Festkörper geübten Kräfte ist dann immer noch F~ = −F~G und
wird auf den Gravitationsschwerpunkt G des Systems Σ von Fluiden angewendet — auch wenn G
nicht mit dem Schwerpunkt des Festkörpers übereinstimmt. Dies bildet das Archimedische Prinzip.
IV.2 Stationäre Lösungen
In diesem Abschnitt werden stationäre Lösungen der Bewegungsgleichungen für ein ideales Fluid
untersucht: alle partiellen Zeitableitungen verschwinden, die Strömungsgeschwindigkeit ~v(~r) kann
aber nicht Null sein.
IV.2.1 Bernoulli-Gleichung
Sei zunächst eine inkompressible Strömung, d.h. mit konstanter ρ. Die Euler-Gleichung (III.21)
lässt sich dann umschreiben als
2
~
v(~
r
)
P
(~
r
)
~
~ r).
∇
+
+ Φ(~r) = 2~v(~r) × Ω(~
(IV.5)
2
ρ
Sei jetzt d~`(~r) ein Vektor tangential zur Stromlinie im Punkt ~r. Bildet man das Skalarprodukt
~ r)], denn d~`(~r) ist
von d~`(~r) mit Gl. (IV.5), so verschwindet die rechte Seite d~`(~r) · [2~v(~r) × Ω(~
~
~ die Ableitung
definitionsgemäß kollinear zur Strömungsgeschwindigkeit ~v(~r). Dazu stellt d`(~r) · ∇
~
entlang der Richtung von d` dar. Folglich ist die Ableitung des Terms in eckigen Klammern in
Gl. (IV.5) entlang der Richtung einer Stromlinie null, d.h. dieser Term bleibt konstant entlang einer
Stromlinie
~v(~r)2 P (~r)
(IV.6)
+
+ Φ(~r) = Konstante entlang einer Stromlinie,
2
ρ
wobei die Konstante von der Stromlinie abhängt. Gleichung (IV.6) wird als Bernoulli-Gleichung
bezeichnet.
Physikalisch kann man die Bernoulli-Gleichung als eine Formulierung der Erhaltung der Energie
des Fluids entlang einer Stromlinie betrachten: ~v(~r)2 /2 ist die spezifische (d.h. pro Masseneinheit)
kinetische Energie des Fluids, Φ(~r) dessen spezifische potentielle Energie, während P (~r)/ρ der spezifischen Arbeit der Druckkräfte in der Bewegung entspricht. Vgl. auch die letzte Bemerkung unten.
Bemerkungen:
~ r) = ~0 ist die Konstante die gleiche für alle Stromlinien.
∗ In einer wirbelfreien Strömung Ω(~
~ P (~r)/ρ + Φ(~r) = 0, d.h. gerade die Grundgleichung (IV.1)
∗ Im Fall ~v(~r) = ~0 gibt Gl. (IV.5) ∇
der Hydrostatik eines inkompressiblen Fluids.
IV. Strömungen eines idealen Fluids
30
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
∗ Für ein viskoses Fluid nimmt ~v(~r)2 /2 + P (~r)/ρ + Φ(~r) entlang einer Stromlinie ab, entsprechend
der von der Reibung verursachten Umwandlung von kinetischer Energie in Wärme.
∗ Falls die Strömung kompressibel
ist, das Fluid aber noch ideal, kann in der obigen Herleitung
~ P (~r) /ρ(~r) als einen Gradienten umzuschreiben. Damit findet
Gl. (IV.3) benutzt werden, um ∇
man die alternative Form der Bernoulli-Gleichung
~v(~r)2 w(~r)
+
+ Φ(~r) = Konstante entlang einer Stromlinie,
2
ρ(~r)
(IV.7)
mit w(~r) der Enthalpiedichte.
Diese Form der Bernoulli-Gleichung folt auch aus dem Skalarprodukt des oben eingeführten Vektors
d~`(~r) mit der Energieerhaltung (III.35), wenn man im Energieterm die potentielle Energiedichte im
Gravitationsfeld ρ(~r)Φ(~r) berücksichtigt. Folglich bringt die Energieerhaltung nichts Neues.
IV.2.2 Anwendungen der Bernoulli-Gleichung
IV.2.2
a Ausflussgeschwindigkeit aus einem Gefäß. Torricelllis Theorem
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Eine Flüssigkeit sei in einem Gefäß mit einem kleinen Loch an dessen unteren Ende, durch
welches die Flüssigkeit ausströmen kann.
In den Punkten A und B, die auf der gleichen Stromlinie liegen, ist
A
der Druck gleich dem atmosphärischen Druck10 P A = P B = P 0 .
6
Dann gibt die Bernoulli-Gleichung (bei konstantem Druck)
h
B ?
2
v2
vA
+ gzA = B + gzB ,
2
2
mit zA bzw. zB der Höhe des Punkts A bzw. B, d.h.
2
2
vB
= vA
+ 2gh.
Wenn die Geschwindigkeit zum Punkt A verschwindet, ergibt sich Torricellis Theorem
p
vB = 2gh,
was genau gleich der Geschwindigkeit eines Körpers ist, der von einer Höhe h im Gravitationsfeld
frei fällt.
Bemerkung: Um die Bernoulli-Gleichung anwenden zu dürfen muss man zeigen, dass die Strömung
stationär ist. Tatsächlich ist das in guter Näherung der Fall.
IV.2.2 b Venturi-Effekt
Es sei die folgende Anordnung für die eindimensionale Strömung eines inkompressiblen Fluids:
:::::::::::::::::::::::
v1-
@
@
S
s
v2 -
Die Erhaltung des Massenstroms durch den Rohr, gegeben durch die integrale Formulierung der
Kontinuitätsgleichung (III.7), gibt ρSv1 = ρ s v2 , d.h. v2 = (S/s )v1 > v1 .
v2 P 1
v2 P 2
Andererseits gibt die Bernoulli-Gleichung bei konstanter Höhe 1 +
= 2+
.
2
ρ
2
ρ
1/2
P 1 − P 2 S2
Insgesamt ist P 1 > P 2 und der Massenstrom lautet ρS 2
−1
.
ρ
s2
10
Man kann zeigen, dass der Druck im Fluid im Punkt B gleich dem atmosphärischen Druck ist, wenn die Stromlinien lokal parallel zueinander sind (laminare Strömung).
IV. Strömungen eines idealen Fluids
31
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
IV.2.2
c Pitot-Rohr
:::::::::::::::::::
Abbildung IV.2 stellt schematisch die Strömung um einen Pitot-Rohr dar, der zur Messung einer Strömungsgeschwindigkeit über eine Druckmessung dient. Dabei werden drei Stromlinien der
Strömung gezeigt: weit vom Pitot-Rohr ist die Strömung gleichförmig mit der zu messenden Geschwindigkeit ~v. Dazu wird angenommen, dass die Strömung inkompressibel ist.
- Manometer
(
O• 0
O•
I•
-
0
A
•
•
A
-
•
B
-
~v
-
Abbildung IV.2: Strömung um einen Pitot-Rohr.
Der Pitot-Rohr besteht aus zwei langen dünnen konzentrischen Rohren:
• trotz dem Loch im Endpunkt I dringt die Strömung nicht in den inneren Rohr ein, ~vI = ~0;
• im äußeren Rohr gibt es ein anderes Loch in einem Punkt A, der entfernt genug vom Endpunkt
I ist, damit die Strömung in der Nähe von A nicht mehr durch den Endpunkt beeinflusst ist:
~vA = ~vA0 ' ~v, wobei die zweite Gleichung aus der Dünnheit des Rohrs — der damit die
Eigenschaften der Strömung fast nicht stört — folgt. Dazu ist der Druck im äußeren Rohr
gleichförmig, so dass P A = P B .
Unter Vernachlässigung der Höhenunterschiede liefert die Bernoulli-Gleichung erstens
~v2
PO + ρ = PI
2
entlang der Stromlinie OI, sowie
~v2 0
~v2
= P A0 + ρ A
2
2
0
0
entlang der Stromlinie O A . Unter Verwendung von P O0 ' P O , P A0 ' P A und ~vA0 ' ~v liefert die
letztere Gleichung P O ' P A = P B . Somit gilt
P O0 + ρ
so dass die Messung von P I − P B
~v2
PI − PB = ρ ,
2
eine Messung von |~v| liefert.
Bemerkung: Eine Strömung mit der Geschwindigkeit ~v um einen ruhenden Pitot-Rohr ist äquivalent zur Bewegung eines mit der Geschwindigkeit −~v bewegten Pitot-Rohrs in einem ruhenden
Fluid. Somit werden Pitot-Rohre zur Messung der Geschwindigkeit von Flugzeugen benutzt.
IV.2.2
d Magnus-Effekt
:::::::::::::::::::::::
In eine anfangs gleichförmige stationäre Strömung mit der Geschwindigkeit ~v0 wird ein Zylinder
eingeführt, der sich um seine Achse mit der Winkelgeschwindigkeit ω
~ dreht (Abb. IV.3).
Intuitiv kann man erwarten, dass der Zylinder in seiner Rotation die benachbarten Schichten
des Fluids mitreißt.11 Unter diesem Ansatz wird die durch die Rotation bedingte Geschwindigkeit
zu der anfänglichen Strömungsgeschwindigkeit im unteren bzw. oberen Bereich der in Abb. IV.3
dargestellten Strömung addiert bzw. abgezogen.
11
Dies gilt streng genommen für ein ideales Fluid nicht, sondern nur für ein viskoses Fluid! Hier wird also angenommen, dass die durch die Viskosität ermöglichten Tangentialspannungen schwach genug sind, damit die BernoulliGleichung legitim verwendet werden kann.
IV. Strömungen eines idealen Fluids
32
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
ω
~
~v0
Abbildung IV.3: Strömung um einen sich drehenden Zylinder.
Dann ist laut der Bernoulli-Gleichung der Druck höher im oberen Bereich als unter dem Zylinder,
so dass der Zylinder einer nach unten gerichteten resultierenden Kraft unterliegt, entsprechend dem
Magnus-Effekt. (Genauer ist diese Kraft proportional zu ~v0 × ω
~ ).
IV.3 Erhaltung der Zirkulation
Sei jetzt wieder eine beliebige Strömung~v(t, ~r) eines idealen Fluids. Da das Fluid ideal ist, bleibt
in dessen Bewegung die Entropie pro Teilchen s/n erhalten, was zur Gl. (IV.3) führt.
Definition: Sei ~γ (t, λ) eine durch λ ∈ [0, 1] parametrisierte geschlossene Kurve, die sich mit dem
Fluid mitbewegt. Das Integral
I
Γ~γ (t) ≡ ~v(t, ~γ (t, λ)) · d~`
(IV.8)
~γ
heißt Zirkulation der Geschwindigkeit entlang dieser Kurve.
Bemerkung: Nach dem Integralsatz von Stokes ist Γ~γ (t) gleich dem Fluss der Wirbligkeit durch
jede durch ~γ abgegrenzte Fläche S~γ (t):
Z
Z
2
~
~
~
(IV.9)
ω
~ (t, ~r) · d2 S.
Γ~γ (t) =
∇ ×~v(t, ~r) · d S =
S~γ
S~γ
Thomsonscher Satz: Wenn die Volumenkräfte f~V (t, ~r)/ρ(t, ~r) sich als Gradienten von Potentiale
schreiben lassen, dann bleibt die Zirkulation in der Bewegung erhalten.12
Thomsonscher Satz:
DΓ~γ (t)
= 0.
Dt
(IV.10)
Beweis: Der Kürze halber wird die Zeit- bzw. λ-Abhängigkeit nicht geschrieben falls es unnötig
~ angenommen. Dann gilt
ist. Außerdem wird f~V = −ρ∇Φ
Z 1
Z 1 2
DΓ~γ
D
∂~γ (t, λ)
∂ ~γ
∂~γ
∂~v X ∂~v ∂γi
=
·~v(t, ~γ (t, λ)) dλ =
·~v +
·
+
dλ.
Dt
Dt 0
∂λ
∂λ ∂t
∂λ
∂t
∂γi ∂t
0
j
∂~γ (t, λ)
Die Kurve ~γ (t, λ) bewegt sich mit der Flüssigkeit, so dass
= ~v(t, ~γ (t, λ)). Damit gilt
∂t
Z 1
Z 1 2 DΓ~γ
∂~v
∂~γ
∂~v
∂ ~v
∂~γ ~ w
~ ~v dλ =
=
· ~v +
·
+ ~v · ∇
−
·∇
+ Φ dλ
Dt
∂λ
∂λ
∂t
∂λ 2
∂λ
ρ
0
0
" #1 I
~v2
~ w + Φ · d~` = 0,
=
− ∇
2
ρ
~
γ
0
wobei die Gleichung in der ersten Zeile aus der Euler-Gleichung (III.22) folgt, während in der
zweiten Zeile der zweite Term — die Zirkulation eines Gradienten längs einer geschlossenen
Kurve — dank dem Stokes’schen Satz verschwindet.
12
Dieser Satz wird auch manchmal Satz von Kelvin genannt.
IV. Strömungen eines idealen Fluids
33
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkung: Laut diesem Satz bleibt eine Strömung, wenn sie irgendwann überall wirbelfrei ist
[~
ω (t, ~r) = ~0], in der Zukunft ebenfalls wirbelfrei, vgl. Gl. (IV.9).
IV.4 Potentialströmung
IV.4.1 Geschwindigkeitspotential
~ (~r), dessen Rotation
Gemäß einem bekannten Ergebnis der Vektoranalysis kann ein Vektorfeld V
13
überall null ist, als der Gradient eines Skalarfeldes geschrieben werden. Im Fall einer wirbelfreien
~ ×~v(t, ~r) = ~0 kann deshalb die Strömungsgeschwindigkeit als
Strömung ∇
~
~v(t, ~r) = −∇ϕ(t,
~r)
(IV.11)
geschrieben werden, mit ϕ(t, ~r) dem Geschwindigkeitspotential .
Folglich wird eine wirbelfreie Strömung auch Potentialströmung genannt.
Bemerkung: Das Vorzeichen in Gl. (IV.11) entspricht keiner allgemeinen Konvention, sondern
~ = −∇V
~ ) oder der Gravitatiermöglicht die Verwendung von Analogien mit der Elektrostatik (E
~
~
onstheorie (FGravitation = −∇Φ).
Mit dem Geschwindigkeitspotential lautet die Kontinuitätsgleichung (III.7) bzw. die EulerGleichung (III.22)
∂ρ(t, ~r) ~ ~
− ∇ · ρ(t, ~r) ∇ϕ(t,
~r) = 0
(IV.12a)
∂t
bzw.
(
)
2
~
~
~r)
∂ ∇ϕ(t,
~r) ~ ∇ϕ(t,
w(t, ~r)
−
(IV.12b)
+∇
+
+ Φ(t, ~r) = 0.
∂t
2
ρ(t, ~r)
Aus der letzteren Gleichung folgt
2
~
∇ϕ(t,
~r)
∂ϕ(t, ~r)
w(t, ~r)
−
+
+
+ Φ(t, ~r) = Konstante,
∂t
2
ρ(t, ~r)
(IV.13)
wobei die Konstante den gleichen Wert in der ganzen Strömung annimmt. Falls die Strömung stationär ist, so dass die Zeitableitung verschwindet, wird Gl. (IV.13) zur Bernoulli-Gleichung für eine
wirbelfreie Strömung.
IV.4.2 Inkompressible Potentialströmungen
Falls die Strömung inkompressibel ist, vereinfacht sich die Kontinuitätsgleichung (IV.12a) zu
4ϕ(t, ~r) = 0,
(IV.14)
d.h. zur Laplace-Gleichung.
Um die letztere lösen zu können, muss man auch Randbedingungen festlegen, in Übereinstimmung
mit dem in Abschn. III.3.2 c diskutierten Verhalten der Strömungsgeschwindigkeit eines idealen
Fluids.
Beispiel
einer inkompressiblen Potentialsträmung
:::::::::::::::::::::::::::::::::::::::::::::::
Sei die im Bereich x1 > 0, x2 > 0 definierte zweidimensionale stationäre Strömung mit dem Geschwindigkeitsfeld
~v(t, ~r) = k − x1 ~e1 + x2 ~e2 ,
(IV.15)
mit k einer positiven Konstante.
~ · ~v = −k + k = 0, und
Man prüft einfach nach, dass diese Strömung inkompressibel ist: ∇
~ v = ~0; das zugehörige Geschwindigkeitspotential ist ϕ(t, ~r) = k (x2 −x2 )+Konstante.
wirbelfrei: ∇×~
2
2 1
13
... in einem einfach zusammenhängenden Bereich.
IV. Strömungen eines idealen Fluids
34
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Die Äquipotentiallinien sind die Hyperbeln x21 − x22 = const. mit der Asymptote x2 = x1 . Diese
Äquipotentiallinien sind orthogonal zu den Stromlinien, d.h. den Hyperbeln x1 x2 = Konstante, wie
in Abb. IV.4 dargestellt wird.
Abbildung IV.4: Stromlinien (durchgezogene Linien) und Äquipotentiallinien (Strichlinien) für die
Potentialströmung (IV.15).
IV.5 Wellen
Eine wichtige Art von Lösungen der Gleichungen (III.7), (III.18) und (III.35) sind die fortschreitenden Wellen in einem Fluid. Schall- (Abschn. IV.5.1) und Schwerewellen (Abschn. IV.5.3) können
in erster Näherung als kleine Störungen betrachtet werden, und lassen sich somit durch Linearisierung der Bewegungsgleichungen herleiten. Andererseits führt die Nichtlinearität der Euler-Gleichung
zum Phänomen der Stoßwellen (Abschn. IV.5.2).
IV.5.1 Schallwellen
Schallwellen sind kleine adiabatische Dichtestörungen um eine „ungestörte“ Strömung, d.h. sie
beruhen auf die Kompressibilität des Fluids. Der Einfachheit halber werden im Folgenden Störungen
eines gleichförmigen ruhenden idealen Fluids betrachtet.
Die ruhende Hintergrundsströmung löst die Bewegungsgleichungen mit gleichförmigen Feldern
ρ0 , P 0 ,~v0 = ~0, sowie einer Entropie S0 und einer Teilchenzahl N0 . Die Schallwellen werden beschrieben durch Felder
ρ(t, ~r) = ρ0 + ρ0 (t, ~r),
(IV.16a)
P (t, ~r) = P 0 + P 0 (t, ~r),
(IV.16b)
0
~v(t, ~r) = ~0 +~v (t, ~r),
(IV.16c)
mit
ρ0 , |P (t, ~r)| P 0 , entsprechend der erforderten Kleinheit der Störungen. Für die
Geschwindigkeit wird diese Bedingung der Kleinheit durch |~v 0 (t, ~r)| cs mit cs der Schallgeschwindigkeit gegeben, wie unten gezeigt wird.
Werden die Felder (IV.16) in die Gleichungen (III.7), (III.18) eingesetzt, so verschwinden die
Teile der Gleichungen, den die Felder ρ0 , P 0 , ~v0 genügen. Es bleibt dann
∂ρ0 (t, ~r)
~ ·~v 0 (t, ~r) + ∇
~ · ρ0 (t, ~r)~v 0 (t, ~r) = 0,
+ ρ0 ∇
(IV.17a)
∂t
|ρ0 (t, ~r)|
0
IV. Strömungen eines idealen Fluids
35
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
∂~v 0 (t, ~r) 0
0
0
~
~ P 0 (t, ~r) = 0.
ρ0 + ρ (t, ~r)
+ ~v (t, ~r) · ∇ ~v (t, ~r) + ∇
∂t
(IV.17b)
In der Kontinuitätsgleichung kann der dritte Term in erster Näherung vernachlässigt werden, denn
er ist mutmaßlich viel kleiner als die zwei anderen. Ebenfalls können in Gl. (IV.17b) ρ0 (t, ~r) und
der konvektive Term in den geschweiften Klammern weggelassen werden. Anders gesagt werden
ρ0 (t, ~r), P 0 (t, ~r) und ~v 0 (t, ~r) als kleine Größen erster Ordnung betrachtet, und Produkte davon als
kleine Größen höherer Ordnung, die zunächst vernachlässigt werden können. Damit werden die
Gleichungen für die gekoppelten Entwicklungen von ρ0 (t, ~r), P 0 (t, ~r), ~v 0 (t, ~r) linearisiert:
∂ρ0 (t, ~r)
~ ·~v 0 (t, ~r) = 0,
+ ρ0 ∇
(IV.18a)
∂t
∂~v 0 (t, ~r) ~ 0
+ ∇P (t, ~r) = 0.
(IV.18b)
ρ0
∂t
Betrachtet man den Druck P als Funktion von ρ, S und N , so lautet dessen Taylor-Entwicklung
um den Punkt P 0 = P (ρ0 , S0 , N0 ), unter Berücksichtigung der Adiabatizität dS = 0 und der Teilchenzahlerhaltung dN = 0
∂P
∂P
∂P
∂P
0
0
P =
ρ +
dS +
dN =
ρ0 ≡ c2s ρ0 ,
∂ρ S,N
∂S ρ,N
∂N S,ρ
∂ρ S,N
wobei
c2s
∂P
=
∂ρ S,N
(IV.19)
~ P 0 (t, ~r) kann durch
implizit von ρ0 , S0 und N0 abhängt. Damit wird P 0 durch ρ0 ausgedrückt, und ∇
2
0
~
cs ∇ρ (t, ~r) in Gl. (IV.18b) ersetzt werden.
Die darauffolgenden Gleichungen für ρ0 (t, ~r),~v 0 (t, ~r) sind lineare partielle Differentialgleichungen,
die mithilfe der komplexen Fourier-Darstellung gelöst werden können:
h
i
h
i
~
~
~v 0 (t, ~r) = Re ~˜v 0 (ω, ~k) e−iωt+ik·~r ,
ρ0 (t, ~r) = Re ρ̃0 (ω, ~k) e−iωt+ik·~r ,
(IV.20)
mit komplexen ρ̃0 (ω, ~k), ~˜v 0 (ω, ~k), und wobei ω von ~k abhängen kann. Mit diesen Ansätzen geben die
Gleichungen für ρ0 (t, ~r) und ~v 0 (t, ~r)
−iω ρ̃0 (ω, ~k) + iρ0~k · ~˜v 0 (ω, ~k) = 0
−iωρ0 ~˜v 0 (ω, ~k) + ic2~k ρ̃0 (ω, ~k) = 0.
s
Nach Multiplikation der zweiten Gleichung links mit ~k kann dieses System als
!
!
!
0
−ω
ρ0
ρ̃0 (ω, ~k)
=
~k · ~˜v 0 (ω, ~k)
c2s~k 2 −ωρ0
0
umgeschrieben werden.
Neben der trivialen Lösung ρ̃0 (ω, ~k) = 0, ~˜v 0 (ω, ~k) = ~0 — d.h. die Abwesenheit von Störung — existieren nicht-trivialen Lösungen dieser Matrixgleichung nur dann, wenn die Determinante verschwindet,
d.h. wenn (ω 2 − c2s~k 2 )ρ0 = 0. Dies liefert die Dispersionsrelation
ω = ±cs |~k|.
(IV.21)
ρ0 (t, ~r) [und folglich P 0 (t, ~r)] und ~v 0 (t, ~r) sind dann Funktionen von cs t ± ~r · ~e~k , mit ~e~k dem Einheitsvektor in der Richtung von ~k, statt Funktionen von unabhängigen t und ~r. Es handelt sich also
um fortschreitende Wellen, die sich mit der Phasengeschwindigkeit cs ausbreiten. Somit ist cs die
Schallgeschwindigkeit.
IV. Strömungen eines idealen Fluids
36
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkungen:
~
∗ Wenn die Strömung wirbelfrei ist, ~v(t, ~r) = −∇ϕ(t,
~r), dann ist das Geschwindigkeitspotential ϕ
Lösung der Wellengleichung
∂ 2 ϕ(t, ~r)
− c2s 4ϕ(t, ~r) = 0,
∂t2
die aus den Gl. (IV.18) folgt.
∗ Im Allgemeinen ist ~k · ~˜v 0 (ω, ~k) 6= 0, im Gegensatz zum Fall einer elektromagnetischen Welle im
~ = 0, entsprechend der Maxwell–Gauß-Gleichung in Abwesenheit von Ladungen, und
Vakuum (~k · E
~k · B
~ = 0, entsprechend der Maxwell–Thomson-Gleichung): während die elektromagnetischen Wellen
im Vakuum transversal sind, besitzen die Schallwellen auch eine longitudinale Komponente.
Beispiel: Für Luft bei T = 300 K ist cs = 347 m·s−1 .
Luft ist ein diatomares ideales Gas mit dem Druck P = N kB T /V und der inneren Energie
U = 25 N kB T .
∂P
N kB ∂T
V 2 ∂P
V2
N kB T
+
=−
=−
−
.
Dann ist c2s =
∂ρ S,N
mN ∂V S,N
mN
V2
V
∂V S,N
Aus der thermodynamischen Gleichung dU = T dS − P dV + µ dN folgt bei konstanten Entropie
und Teilchenzahl
5
2P
2 N kB T
∂E
∂T
∂T
= − N kB
d.h.
N kB
=−
=−
.
P =−
∂V S,N
2
∂V S,N
∂V S,N
5
5 V
woraus c2s =
7 kB T
folgt, mit mLuft = 29/NA g·mol−1 .
5 mLuft
Auf dem Term in geschweiften Klammern in Gl. (IV.17b) sieht man die jeweiligen Größenordnungen des führenden und des vernachlässigten Terms: ω|~v 0 | bzw. |~k||~v 0 |2 . Damit der Letztere
wirklich viel kleiner als der Erstere ist, muss gemäß Gl. (IV.21) |~v 0 | cs gelten.
IV.5.2 Stoßwellen
Wenn die Amplitude der in Abschnitt IV.5.1 betrachteten Schallwelle groß wird, so dass |~v 0 | cs
nicht mehr gilt, spielen die nicht-linearen Terme in den Bewegungsgleichungen auch eine Rolle. Der
Einfachheit halber wird dies hiernach für den Fall eines eindimensionalen Problems untersucht.
Die Bewegungsgleichungen (IV.17) lauten
∂ρ(t, x)
∂v0 (t, x)
∂ρ(t, x)
+ ρ(t, x)
+ v0 (t, x)
= 0,
∂t
∂x
∂x
∂v0 (t, x)
∂v0 (t, x)
∂ P 0 (t, x)
ρ(t, x)
+ v0 (t, x)
+
= 0.
∂t
∂x
∂x
(IV.22a)
(IV.22b)
Wie in Abschnitt IV.5.1 lässt sich die Variation des Drucks durch die Variation der Massendichte
ausdrücken. Dann kann P 0 (t, x) durch cs (ρ)2 ρ0 (t, x) in der zweiten Gleichung ersetzt werden.14 Die
Ableitung von ρ0 (t, x) nach x stellt auch die Ableitung nach x von ρ(t, x) dar, so dass man zwei
Gleichungen für die zwei unbekannten Funktionen ρ(t, x) und v0 (t, x) = v(t, x) erhält:
∂ρ(t, x)
∂v(t, x)
∂ρ(t, x)
+ ρ(t, x)
+ v(t, x)
= 0,
∂t
∂x
∂x
∂v(t, x)
∂v(t, x)
∂ρ(t, x)
ρ(t, x)
+ v(t, x)
= 0.
+ cs (ρ)2
∂t
∂x
∂x
14
(IV.23a)
(IV.23b)
Hier wird stillschweigend cs (ρ0 ) in der Taylor-Entwicklung oberhalb Gl. (IV.19) durch cs (ρ) ersetzt.
IV. Strömungen eines idealen Fluids
37
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Um diese Gleichungen zu lösen, kann man annehmen, dass die Massendichte und die Strömungsgeschwindigkeit sich parallel zueinander mit der Zeit und dem Ort ändern, denn dies gilt für die
Lösungen der linearisierten Gleichungen — die Schallwellen, in denen ρ(t, ~r) und ~v(t, ~r) die gleiche
Phase (cs |~k|t+~k ·~r) haben. Die Abhängigkeit von v nach t und x kann dann durch eine Abhängigkeit
v(ρ(t, x)) ersetzt werden, mit v(ρ0 ) = 0. Somit lassen sich die partiellen Ableitungen nach t bzw. x
des Geschwindigkeitsfeldes als
∂v(t, x)
dv(ρ) ∂ρ(t, x)
=
∂t
dρ
∂t
bzw.
∂v(t, x)
dv(ρ) ∂ρ(t, x)
=
∂x
dρ
∂x
dv(ρ)
umschreiben und in Gl. (IV.23) einsetzen. Multipliziert man Gl. (IV.23a) mit ρ(t, x)
und zieht
dρ
man dann Gl. (IV.23b) von dem Resultat ab, so ergibt sich
2
2 dv(ρ)
2 ∂ρ(t, x)
ρ
− cs (ρ)
= 0,
dρ
∂x
d.h.
dv(ρ)
cs (ρ)
=±
.
dρ
ρ
(IV.24)
Die simultane Substitution v → −v, x → −x, cs → −cs lässt die Gleichungen (IV.23)-(IV.24)
invariant. Somit kann man nur den Fall des + Vorzeichens in Gl. (IV.24) betrachten. Die Geschwindigkeit ist dann gegeben durch
Z ρ
cs (ρ0 ) 0
dρ ,
v(ρ) =
0
ρ0 ρ
während Gl. (IV.23a) sich umschreiben lässt als
∂ρ(t, x)
∂ρ(t, x) + v ρ(t, x) + cs ρ(t, x)
= 0.
∂t
∂x
(IV.25)
Schreibt man die Massendichte als eine fortschreitende Welle f (x − cw t), so ist deren Phasengeschwindigkeit cw = cs (ρ) + v. Da dv(ρ)/dρ > 0 ist [Gl. (IV.24)], nimmt cw mit wachsender
Massendichte zu: die dichten Bereiche holen die verdünnten ein, wie in Abb. IV.5 dargestellt wird.
Insbesondere kann es einigen Fällen für eine endliche Zeit zu einer Unstetigkeit in einem Punkt x0
der Funktion ρ(t, x) kommen, entsprechend (der Front) einer Stoßwelle.
Um die Eigenschaften der Strömung im Bereich der Stoßwelle weiter zu diskutieren, müssen
zunächst die Verhalten der verschiedenen Größen am Unstetigkeitspunkt präzisiert werden. Der
Kürze halber werden im nächsten Paragraph die t- und ~r-Abhängigkeit der Strömungsfelder nicht
geschrieben.
Sprunggleichungen an Unstetigkeitsflächen
Oben wurde ein Beispiel für die Unstetigkeit einer makroskopischen Eigenschaft des Fluids
an einem Punkt einer eindimensionalen Strömung gefunden. In einer dreidimensionalen Strömung
würde eine Unstetigkeitsfläche, anstatt eines einzigen Punkts, stattfinden.
Sei ein sich mit der Unstetigkeitsfläche mitbewegendes Koordinatensystem, mit ~e1 dem Einheitsvektor senkrecht zur Fläche. Der Bereich vor bzw. hinter der Fläche wird durch (+) bzw. (−)
bezeichnet, d.h. das Fluid, in dem die Stoßwelle propagiert, bewegt sich von dem (+)- nach dem
(−)-Gebiet. Der Sprung einer lokalen Größe g (~r) an der Unstetigkeitsfläche wird definiert als
(IV.26)
g ≡ g + − g −,
:::::::::::::::::::::::::::::::::::::::::
wobei g + bzw. g − den Grenzwert von g im Limes x1 → 0+ bzw. x1 → 0− bezeichnet. Ist eine solche
Größe an der Unstetigkeitsfläche stetig, so verschwindet natürlich ihr Sprung.
IV. Strömungen eines idealen Fluids
38
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
ρ6
t0
-
x
t1 > t0
-
x
t2 > t1
-
x
t3 > t2
-
x
t4 > t3
-
x
Abbildung IV.5: Schematische Darstellung einer Stoßwelle.
Ganz allgemein müssen an einer Unstetigkeitsfläche die Massen- (oder Teilchen-), Energie- und
Impulsströme durch die Fläche — d.h. in die x1 -Richtung — stetig bleiben, entsprechend der lokalen
Erhaltung von Masse (oder Teilchenzahl), Energie und Impuls:
ρv1 = 0,
πi1 = 0 ∀i = 1, 2, 3,
(IV.27)
1 2
ρ~v + e + P v1 = 0.
2
Die Stetigkeit des Massenstroms durch die Fläche lautet auch (ρv1 )− = (ρv1 )+ ≡ j1 . Setzt man
diese Identität in die Sprunggleichungen für die Komponenten π21 = ρv2 v1 bzw. π31 = ρv3 v1 der
Impulsstromdichte, entsprechend dem Strom durch die Unstetigkeitsfläche der Komponenten ρv2
und
parallel zur Fläche, so ergibt sich (v2 )− = (v2 )+ bzw. (v3 )− = (v3 )+ , d.h.
ρv3 des Impulses
v2 = 0 bzw. v3 = 0.15
Wenn man jetzt j1 in die Sprunggleichung für π11 = P + ρv12 einsetzt, ergibt sich
1
1
−
.
(IV.28)
P − − P + = j1 (v1 )+ − (v1 )− = j12
ρ+ ρ−
Mit j1 > 0, entsprechend der Bewegung des Fluids von dem (+)- nach dem (−)-Gebiet, findet
man für P − > P + die Ungleichungen ρ− > ρ+ (Verdichtung des Fluids hinter der Stoßfront) und
(v1 )+ > (v1 )− .
Falls die Sprünge der Größen klein sind, ist die Strömungsgeschwindigkeit vor der Stoßfront
größer als die lokale Schallgeschwindigkeit. Dies folgt aus
j12
P − − P + ρ− ρ+
∂P
ρ−
2
'
> c2s .
(v1 )+ = 2 =
2
ρ− − ρ+ ρ+
∂ρ S,N ρ+
ρ+
15
Hier wurde stillschweigend j1 6= 0 angenommen! Falls dies nicht gilt, heißt es, dass es keinen makroskopischen
Strom von Materie durch die Unstetigkeitsfläche gibt. Dann ist die Sprunggleichung für den Energiestrom automatisch
erfüllt, während [[π11 ]] = 0 die Bedingung [[P ]] = 0 gibt, d.h. der Druck muss kontinuierlich sein. Alle anderen Größen
(ρ, v2 , v3 ...) können einen beliebig großen Sprung haben.
IV. Strömungen eines idealen Fluids
39
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Umgekehrt gilt hinter der Stoßfront (v1 )− < cs .
Dank der Kontinuität der Komponenten v2 , v3 parallel zur Unstetigkeitsfläche vereinfacht sich
die Sprunggleichung für den Energiestrom zu
1 2 e+p
e+ + P + e− + P −
j12 1
1
=
− 2 +
−
= 0.
v1 +
2
2
ρ
2 ρ+ ρ−
ρ+
ρ−
Ersetzt man j12 mithilfe von Gl. (IV.28), so erhält man nach einigen Berechnungen
1
e+
e−
P+ + P− 1
−
+
−
=0
2
ρ+ ρ−
ρ+ ρ−
oder auch
P+ − P−
1
1
w+ w−
+
=
−
,
2
ρ+ ρ−
ρ+
ρ−
mit w = e + P der Enthalpiedichte. Diese äquivalenten Gleichungen stellen eine Beziehung zwischen
thermodynamischen Größen auf den beiden Seiten der Unstetigkeitsfläche dar, die als dynamische
Adiabate oder Rankine–Hugoniot-Adiabate bezeichnet wird.
IV.5.3 Schwerewellen
Dieser Abschnitt befasst sich mit den Wellen an der oberen Oberfläche einer ursprünglich ruhenden Flüssigkeit, bei denen die Gravitation für die Rückkehr zum Gleichgewicht verantwortlich
ist: dabei handelt es sich um Schwerewellen.
Das Problem wird als eine wirbelfreie inkompressible zweidimensionale Strömung modelliert, mit
ϕ(t, x, z) dem zugehörigen Geschwindigkeitspotential, wobei die x- bzw. z-Achse entlang der Propagationsrichtung der Wellen bzw. entlang der vertikalen Richtung ist, mit z = 0 am (der Einfachheit
halber flachen) Boden der Flüssigkeit. Dabei entspricht die Schwerewelle einer kleinen Änderung
der Höhe der oberen Oberfläche, die sich um h0 (t, x) aus der gleichförmigen Gleichgewichtshöhe h0
verschiebt, mit |h0 (t, x)| h0 .
Der Einfachheit halber wird angenommen, dass die durch die Welle verursachte Krümmung der
Flüssigkeitsoberfläche in jedem Punkt klein genug bleibt, damit die Effekte der Oberflächenspannung
vernachlässigbar seien. Somit lauten die Bewegungsgleichungen [Gl. (IV.13) und (IV.14)]
2
~
∇ϕ(t,
x, z)
∂ϕ(t, x, z)
P (t, x, z)
−
+
+
+ gz = Konstante,
(IV.29a)
∂t
2
ρ
4ϕ(t, x, z) = 0,
(IV.29b)
mit gz dem Gravitationspotential.
Hiernach werden Lösungen für das Geschwindigkeitspotential ϕ(t, x, z) und die Gestalt h0 (t, x)
der Oberfläche gesucht. Um das Problem völlig festzulegen, müssen auch die Randbedingungen
präzisiert werden:
• Am Boden kann die Flüssigkeit keine vertikale Bewegung haben:
∂ϕ vz (z = 0) = − = 0.
∂z
(IV.30a)
z=0
• An der Flüssigkeitsoberfläche bleibt der Druck fest: P t, x, z = h0 + h0 (t, x) = P 0 (wobei P 0
z.B. der atmosphärische Druck sein kann).16 Daraus folgt [Gl. (IV.29a)]
"
2 #
~
∇ϕ(t,
x, z)
∂ϕ(t, x, z)
P0
−
+
+ gh0 (t, x) = −
− gh0 + Konstante, (IV.30b)
∂t
2
ρ
0
z=h0 +h (t,x)
wobei die ganze rechte Seite der Gleichung wiederum eine Konstante darstellt.
16
Hier hängt die Bedingung von der angenommenen Vernachlässigbarkeit der Oberflächenspannung ab.
IV. Strömungen eines idealen Fluids
40
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
• An der Flüssigkeitsoberfläche ist die vertikale Komponente vz der Strömungsgeschwindigkeit
gleich der Geschwindigkeit der Oberfläche
Dh0 (t, x)
∂ϕ(t, x, z) =
−
,
∂z
Dt
z=h0 +h0 (t,x)
d.h., unter Nutzung von
D
∂
∂
∂
∂ϕ ∂
=
+ vx
=
−
Dt
∂t
∂x
∂t ∂x ∂x
∂ϕ(t, x, z) ∂h0 (t, x) ∂h0 (t, x) ∂ϕ(t, x, z)
+
−
∂z
∂t
∂x
∂x
= 0.
(IV.30c)
z=h0 +h0 (t,x)
Setzt man den Ansatz ϕ(t, x, z) = f (z) cos(kx−ωt), entsprechend einer fortschreitenden ebenen
Welle mit Amplitude f (z), in Gl. (IV.29b) ein, so ergibt sich die lineare gewöhnliche Differentialgleichung
d2 f (z)
− k 2 f (z) = 0,
dz 2
deren Lösung f (z) = a1 ekz + a2 e−kz ist, mit a1 und a2 zwei Integrationskonstanten. Unter Berücksichtigung der Randbedingung (IV.30a) bei z = 0 ergibt sich a1 = a2 , d.h.
ϕ(t, x, z) = C cosh(kz) cos(kx − ωt),
(IV.31)
mit C einer Konstante.
Um weitere Ergebnisse analytisch zu erhalten, insbesondere die Gestalt der Oberfläche, ist es
nötig, die Bewegungsgleichungen zu vereinfachen. Daher wird angenommen, dass die Welle eine
kleine Störung darstellt, damit die Gleichungen linearisiert werden können. Somit nimmt man an,
~ 2 ∂ϕ/∂t gilt. Dann wird einerseits Gl. (IV.29a) durch
dass (∇ϕ)
−
∂ϕ(t, x, z) P (t, x, z)
P0
+
+ gz =
+ gh0
∂t
ρ
ρ
(IV.32)
ersetzt. Dazu lassen sich die Randbedingungen (IV.30b)–(IV.30c) an der Flüssigkeitsoberfläche als
∂ϕ(t, x, z) −
+ gh0 (t, x) = Konstante,
(IV.33a)
∂t
z=h0
∂h0 (t, x)
∂ϕ(t, x, z) =0
+
∂z
∂t
z=h0
(IV.33b)
umschreiben, wobei die Bedingung |h0 (t, x)| h0 benutzt wurde.
Diese Randbedingungen liefern sofort
2
∂ ϕ(t, x, z)
∂ϕ(t, x, z)
= 0,
+g
∂t2
∂z
z=h0
was mit Gl. (IV.31) zu −ω 2 C cosh(kh0 ) cos(kx − ωt) + gkC sinh(kh0 ) cos(kx − ωt) = 0 führt, d.h.
zur Dispersionsrelation
ω 2 = gk tanh(kh0 ).
(IV.34)
Diese Dispersionsrelation vereinfacht sich in zwei Grenzfällen:
• Für kh0 1, d.h. h0 λ, wobei λ = 2π/k die Wellenlänge bezeichnet, entsprechend dem
Fall von Scherewellen auf der Oberfläche tiefes Wassers, gilt tanh(kh0 ) ' 1. Dann ist ω 2 = gk:
die Phasen- bzw. Gruppengeschwindigkeit der Wellen ist
r
r
ω
g
dω
1 g
, bzw. cg =
=
,
cϕ = =
k
k
dk
2 k
unabhängig von der Tiefe h0 .
IV. Strömungen eines idealen Fluids
41
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
• Für kh0 1, d.h. flaches Wasser mit h0 λ, führt tanh(kh0 ) ' kh0 zu ω 2 = gh0 k 2 , d.h.
p
vϕ = vg = gh0 ,
unabhängig von der Wellenlänge λ, d.h. es gibt keine Dispersion.
Diese Phasengeschwindigkeit sinkt mit abnehmender Tiefe h0 . Folglich kann ein Stau entstehen, ähnlich wie im Fall der Stoßwelle (s. Abschn. IV.5.2), der aber unter Berücksichtigung
der nichtlinearen Terme beschrieben werden kann. Im Gegenteil wurde in der obigen Berechnung insbesondere |h0 (t, x)| h0 angenommen, so dass der Grenzfall h0 → 0 nicht geradeaus
betrachtet werden kann.
Aus Gl. (IV.33a) ergibt sich die Gestalt der Flüssigkeitsoberfläche
ωC
1 ∂ϕ(t, x, z) 0
=
h (t, x) =
cosh(kh0 ) sin(kx − ωt) ≡ h00 sin(kx − ωt),
g
∂t
g
z=h0
ωC
cosh(kh0 ) der Amplitude der Welle, die viel kleiner als h0 sein muss.
g
Bildet man den Gradienten des Potentials (IV.31), so erhält man die Strömungsgeschwindigkeit
mit h00 ≡
kg cosh(kz) 0
h sin(kx − ωt),
ω cosh(kh0 ) 0
kg sinh(kz) 0
vz (t, x, z) = −
h cos(kx − ωt).
ω cosh(kh0 ) 0
vx (t, x, z) =
Die Integration nach der Zeit dieser Funktionen liefert
x(t) = x0 +
kgh00 cosh(kz)
cos(kx − ωt),
ω 2 cosh(kh0 )
z(t) = z0 +
kgh00 cosh(kz)
sin(kx − ωt),
ω 2 cosh(kh0 )
mit x0 , z0 zwei Integrationskonstanten. Wenn x0 ' x und z0 ' z sind, dann stellen x(t) und z(t)
die Komponenten der Bahnkurve eines Fluidteilchens dar, das sich zur Zeit t in der Nähe des
Punkts mit Koordinaten (x, z) befindet, und dessen Geschwindigkeit zur Zeit t somit ungefähr die
Strömungsgeschwindigkeit ~v(t, x, z) ist. Dabei gilt
2
[x(t) − x0 ]2 [z(t) − z0 ]2
kgh00
+
=
,
ω 2 cosh(kh0 )
cosh2 (kz)
sinh2 (kz)
entsprechend der Gleichung einer Ellipse, deren große und kleine Halbachsen mit wachsender Tiefe
h0 − z abnehmen. Im Fall tiefes Wassers gelten für 1 kz . kh0 die Näherungen sinh(kz) '
cosh(kz) ' ekz /2 und die Bahnkurven der Fluidteilchen nah an der Oberfläche sind Kreise.
Schließlich liefert Eq. (IV.32) unter Verwendung des Potentials (IV.31) den Druck
∂ϕ(t, x, z)
0 cosh(kz)
P (t, x, z) = P 0 + ρg(h0 − z) + ρ
= P 0 + ρg h0 − z + h0
sin(kx − ωt) .
∂t
cosh(kh0 )
Literatur
• Feynman [2, 3] Kapitel 40–1, 40–3 & 40–4 und [12, 13] Kapitel 47
• Guyon et al. [4] Kapitel 6
• Faber [5] Kapitel 2.8, 2.14, 3.6, 4
• Landau–Lifschitz [10] Kapitel I § 3, 5, 8–10, 12, Kapitel VIII § 64 & Kapitel IX § 84.
IV. Strömungen eines idealen Fluids
42
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
V. Strömungen eines Newtonschen Fluids
Dieses Kapitel stellt einige einfache Strömungen dissipativer Fluide dar. Im ganzen Kapitel, bis auf
Abschnitt V.1.1, werden äußere Volumenkräfte der Einfachheit halber nicht berücksichtigt.
V.1 Statik und stationäre Strömungen eines dissipativen Fluids
In diesem Abschnitt werden zunächst die Hydrostatik des Newtonschen Fluids, dann ein paar
stationäre inkompressible Strömungen untersucht.
V.1.1 Statisches viskoses Fluid
Ein statisches [~v(t, ~r) = ~0] viskoses Fluid sei im Gravitationspotential Φ(~r). Die gekoppelten
Gleichungen (III.7), (III.33) und (III.37) lauten jeweils
∂ρ(t, ~r)
= 0,
(V.1a)
∂t
entsprechend der Zeitunabhängigkeit der Massendichte ρ(t, ~r),
~ P (t, ~r) = −ρ(t, ~r) ∇Φ(t,
~
∇
~r),
(V.1b)
analog der Grundgleichung (IV.1) der Hydrostatik eines idealen Fluids, und
∂e(t, ~r) ~ ~ (t, ~r) ,
= ∇ · κ(t, ~r)∇T
(V.1c)
∂t
die einen Energietransport ohne Bewegung, d.h. nicht-konvektiv, durch Wärmeleitung beschreibt.
V.1.2 Ebene Couette-Strömung
Der Einfachheit halber werden im Rest dieses Abschnitts nur inkompressible stationäre laminare
Strömungen betrachtet. Da die Massendichte ρ bekannt ist, braucht man nur vier Gleichungen, um
~v(~r) und P (~r) zu bestimmen, z.B. die Kontinuitäts- und Navier–Stokes-Gleichungen
~ ·~v(~r) = 0
∇
(V.2a)
~ ~v(~r) = − 1 ∇
~ P (~r) + ν4~v(~r),
~v(~r) · ∇
ρ
(V.2b)
mit ν der als konstant angenommenen kinematischen Viskosität.
Ein viskoses Fluid ströme zwischen zwei unendlich ausgedehnten ebenen Platten, wie in Abb. V.1
dargestellt wird, wobei die untere Platte ruht, während die obere sich mit der konstanten Geschwindigkeit ~u in ihrer Ebene bewegt.
h
6
?
- ~v(y)
-
~uy
6
-
x
Abbildung V.1: Anordnung der ebenen Couette-Strömung.
Die Invarianz der Geometrie des Problems unter beliebigen Translationen in der (x, z)-Ebene
begründet einen Ansatz ~v(~r) = v(y)~ex für die Strömungsgeschwindigkeit. Setzt man diesen Ansatz
in Gl. (V.2) ein, so kommen
∂v(y)
= 0,
(V.3a)
∂x
∂v(y)
1~
d2 v(y)
v(y)
~ex = − ∇
P (~r) + ν
~ex .
(V.3b)
∂x
ρ
dy 2
V. Strömungen eines Newtonschen Fluids
43
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Dank dem Ansatz ist die erste Gleichung trivial erfüllt, während der Term auf der linken Seite der
zweiten Gleichung null ist. Die Letztere gibt also ∂ P (~r)/∂y = 0 — entsprechend dem Vernachlässigen
der Schwerkraft —, ∂ P (~r)/∂z = 0 — weil das Problem unabhängig von der z-Richtung ist —, und
∂ P (~r)
d2 v(y)
=η
.
(V.4)
∂x
dy 2
Die rechte Seite dieser Gleichung ist unabhängig von x und z. Somit liefert eine einfache Integration
P (~r) = α(y)x + β(y), wobei α, β nur von y abhängen.
Diese Funktionen folgen aus den Randbedingungen: wenn P (x = −∞) = P (x = ∞) = P ∞ gilt,
dann ist α(y) = 0, β(y) = P ∞ und Gl. (V.4) vereinfacht sich zu d2 v(y)/dy 2 = 0, was zu v(y) = γy+δ
führt, mit γ und δ zwei Konstanten.
Bei jeder Platte verschwindet die Geschwindigkeit der Strömung relativ zur jeweiligen Platte:
v(y = h) = |~u|,
v(y = 0) = 0,
woraus δ = 0 und γ = |~u|/h folgen. Insgesamt gilt also die lineare Abhängigkeit
y
~v(~r) = ~u für 0 ≤ y ≤ h.
h
2
Die Kraft d F~s auf ein Flächenelement d2 S folgt aus dem Spannungstensor [vgl. Gl. (III.28b)]
0
−P ∞ η |~hu|
∂vi (~r) ∂vj (~r)
+
= η |~u| −P ∞
σij (~r) = −P (~r)δij + η
0 .
h
∂xj
∂xi
0
0
−P ∞
Die Kraft pro Flächenelement auf die ruhende Ebene y = 0 mit Normaleinheitsvektor ~en (~r) = ~ey ist
|~u|
3
ηh
2
X
~
d Fs (~r)
=
~
τ
(~
r
)
=
σ
(~
r
)
~
e
·
~
e
~
e
=
−P ∞ .
s
ij
j
y i
d2 S
i,j=1
0
Wegen der Reibung wird die Platte durch die Strömung in die x-Richtung mitgezogen.
Bemerkung: Die Tangentialspannung ist η~u/h, proportional zur Scherviskosität: durch eine Messung der Tangentialspannung bei bekannten |~u| und h erhält man also η. In der Praxis wird eher
das zylindrische Analogon dieser Strömung, die Couette–Taylor-Strömung, angewandt.
V.1.3 Strömung zwischen zwei ruhenden Platten
Ein Newtonsches Fluid ströme jetzt in der Anordnung der Abb. V.2, wobei die Platten in die
x-Richtung endlich ausgedehnt sind und ruhen. Außerdem wird ein Druckgradient in die x-Richtung
angewandt.
P1
6
--
h
?
P2 y
--
6
-
x
-
L
Abbildung V.2: Strömung zwischen zwei ruhenden Platten für P 1 > P 2 , d.h. ∆P > 0.
Die Differentialgleichungen zur Bestimmung von ~v(~r) und P (~r) sind dieselben wie im vorigen
Abschnitt V.1.2, Gl. (V.3)–(V.4); jetzt sind aber die Randbedingungen unterschiedlich. Aus P 1 6= P 2
folgt die Existenz eines nicht-verschwindenden Druckgradienten α = ∂ P (~r)/∂x ≡ −∆P /L 6= 0, mit
∆P ≡ P 1 − P 2 dem Druckgefälle. Dann folgt aus Gl. (V.4) die Abhängigkeit
1 ∆P 2
v(y) = −
y + γy + δ,
2η L
mit γ und δ zwei neuen Konstanten.
V. Strömungen eines Newtonschen Fluids
44
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Die Randbedingungen für die Geschwindigkeit bei den Platten lauten
v(y = 0) = 0,
v(y = h) = 0,
1 ∆P
h führt. Die Strömungsgeschwindigkeit ist also gegeben durch
2η L
1 ∆P v(y) =
y(h − y) für 0 ≤ y ≤ h,
2η L
und ist in die Richtung des Druckgradienten gerichtet.
was zu δ = 0 und γ =
V.1.4 Strömung in einem Rohr
Bei der sog. Hagen–Poiseuille-Strömung handelt es sich um die Strömung in einem zylindrischen
Rohr mit endlicher Länge L und Radius a in Anwesenheit eines Druckgradienten (Abb. V.3)
a
P 1 P 2 -z
-
L
Abbildung V.3: Anordnung der Hagen–Poiseuille-Strömung.
p
~ · ~v (~r) = 0 und
Der Ansatz ~v(~r) = v(r)~ez mit r = x2 + y 2 genügt der Kontinuitätsgleichung ∇
liefert für die inkompressiblen Navier–Stokes-Gleichungen
∂ P (~r)
∂ P (~r)
∂x = ∂y = 0
~ P (~r) = η4~v(~r) ⇔
2
2
∇
(V.5)
∂ P (~r)
∂ v(r) ∂ 2 v(r))
d v(r) 1 dv(r)
=η
+
=
η
+
.
∂z
∂x2
∂y 2
dr2
r dr
Der Term auf der rechten Seite der zweiten Zeile hängt nicht von z ab, so dass der Druckgradient
in die z-Richtung gleich einer Konstante ist:
∆P
∂ P (~r)
=−
,
∂z
L
mit ∆P ≡ P 1 − P 2 . Somit lautet die z-Komponente der Navier–Stokes-Gleichung (V.5)
d2 v(r) 1 dv
∆P
+
=−
.
2
dr
r dr
ηL
(V.6)
Um die allgemeine Lösung der entsprechenden homogenen linearen Differentialgleichung zu finden, kann man zunächst χ(r) ≡ dv(r)/dr einführen. Dann genügt χ der Gleichung
dχ(r) χ(r)
+
= 0,
dr
r
was zu ln χ(r) = − ln r + Konstante führt, d.h. χ(r) = A/r mit A einer Konstante. Nach Integration
ergibt sich dann v(r) = A ln r + B mit B einer zusätzlichen Konstante.
∆P
Eine spezielle Lösung der inhomogenen Differentialgleichung ist v(r) = Cr2 mit C = −
, so
4ηL
dass die allgemeine Lösung der Gl. (V.6) gegeben ist durch
∆P 2
v(r) = A ln r + B −
r .
4ηL
Damit die Strömungsgeschwindigkeit bei r = 0 endlich bleibt, muss A = 0 gelten. Außerdem liefert die Randbedingung bei der Rohrwand v(r = a) = 0 die Konstante B = (∆P /4ηL)a2 . Insgesamt
gilt also
∆P 2
v(r) =
a − r2 für r ≤ a.
(V.7)
4ηL
Wie erwartet ist ~v in die gleiche Richtung wie das Druckgefälle gerichtet.
V. Strömungen eines Newtonschen Fluids
45
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Eine einfache Integration liefert den Massenstrom durch das Rohr:
Z a
Z
∆P a 2
∆P a4
πρa4 ∆P
ρv(r) 2πr dr = 2πρ
Q=
a r − r3 dr = 2πρ
=
.
4ηL 0
4ηL 4
8η L
0
(V.8)
Dieses Resultat wird Hagen–Poiseuille-Gleichung genannt und bedeutet, dass der Massenstrom
proportional zum Druckgefälle pro Längeneinheit ist.
Bemerkungen:
∗ Die Hagen–Poiseuille-Gleichung gilt nur unter der Annahme, dass die Strömungsgeschwindigkeit
an der Rohrwand verschwindet. Deshalb ist die experimentelle Bestätigung der Formel — die durch
Hagen (1839) und Poiseuille (1840) experimentell gefunden wurde — ein Beweis der Gültigkeit des
Ansatzes für die Randbedingungen.
∗ Der Massenstrom durch den Querschnitt des Rohrs lässt sich mithilfe der mittleren Strömungsgeschwindigkeit
Z a
1
1
v(r) 2πr dr = v(r = 0)
hvi ≡
2
πa 0
2
als Q = πa2 ρ hvi umschreiben. Dann bedeutet die Hagen–Poiseuille-Gleichung, dass das Druckgefälle
pro Längeneinheit in einer laminaren Strömung proportional zu hvi ist.
Die Beziehung ist ziemlich unterschiedlich in einer turbulenten Strömung: z.B. lieferten Messungen
durch Reynolds [14] die Abhängigkeit ∆P /L ∝ hvi1,722 .
V.2 Ähnlichkeitsgesetz
~ ·~v(t, ~r) = 0 und
Die inkompressible Strömung eines Fluids genügt der Kontinuitätsgleichung ∇
der Navier–Stokes-Gleichung (III.34). Um den Einfluss der Eigenschaften des Fluids ρ und η bzw.
ν auf die Strömung zu bestimmen, ist es günstig, eine dimensionslose Form der Navier–StokesGleichung zu betrachten.
Sei Lc bzw. vc eine charakteristische Länge bzw. Geschwindigkeit für eine gegebene Strömung.
Damit kann man die physikalischen Größen skalieren, um dimensionslose Größen zu erhalten, die
hiernach mit ∗ bezeichnet werden:
~v
~r
t
P − P0
~r ∗ ≡
, ~v∗ ≡ , t∗ ≡
, P∗ ≡
,
Lc
vc
Lc /vc
ρvc2
wobei P 0 irgendeinen charakterischen Wert des Drucks bezeichnet. Somit lässt sich die inkompressible Navier–Stokes-Gleichung umschreiben als
∂~v∗ (t∗ , ~r ∗ ) ∗ ∗ ∗ ~ ∗ ∗ ∗ ∗
~ ∗P ∗ (t∗ , ~r ∗ ) + η 4∗~v∗ (t∗ , ~r ∗ ),
+ ~v (t , ~r ) · ∇ ~v (t , ~r ) = −∇
∗
∂t
ρvc Lc
(V.9)
∗
~ bzw. 4∗ dem Gradienten bzw. Laplace-Operator bezüglich der reduzierten Ortsvariable ~r ∗ .
mit ∇
Diese Gleichung enthält einen einzigen dimensionslosen Parameter, die Reynolds-Zahl
Re ≡
ρvc Lc
vc Lc
=
.
η
ν
(V.10)
Diese Zahl bildet ein Maß für die relative Wichtigkeit der Trägheits- und Reibungskräfte auf ein
Fluidelement oder einen im Fluid untergetauchten Körper: bei großer bzw. kleiner Re sind viskose
Effekte vernachlässigbar bzw. vorherrschend.
Die Lösungen für die Felder ~v∗ , P ∗ bei gegebenen Randbedingungen werden durch die unabhängigen Variablen t∗ , ~r ∗ , die Reynolds-Zahl und die Geometrie des Problems (entsprechend
dimensionslosen Verhältnissen von geometrischen Längen) festgelegt:
~v∗ (t∗ , ~r ∗ ) = f~(t∗ , ~r ∗ , Re),
V. Strömungen eines Newtonschen Fluids
P ∗ (t∗ , ~r ∗ ) = g(t∗ , ~r ∗ , Re),
(V.11)
46
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
mit f~ bzw. g einer vektoriellen bzw. skalaren Funktion. Dann sind Strömungsgeschwindigkeit und
Druck gegeben durch
v t ~r
vc t ~r
~v(t, ~r) = vc f~
, , Re ,
P (t, ~r) = P 0 + ρvc2 g c , , Re .
Lc Lc
Lc Lc
Die letzteren Gleichungen liegen der Modellierung in der Fluiddynamik mithilfe Versuchsmodelle
in reduziertem Maßstab zugrunde: Es seien Lc , vc bzw. LM , vM die charakteristischen Länge und
Geschwindigkeit für die Strömung in realer Größe bzw. im entsprechenden Versuchsmodell, wobei
das gleiche Fluid benutzt wird. Für vM /vc = LM /Lc ist die Reynolds-Zahl für die Modellströmung
gleich der Zahl für die Strömung in realer Größe und beide Strömungen sind ähnlich, d.h. besitzen
die gleichen ~v∗ und P ∗ .
Bemerkungen:
∗ Die Navier–Stokes-Gleichung enthält keinen Parameter mit der Dimension entweder einer Länge
oder einer Geschwindigkeit. Deshalb spiegeln Lc und vc die Randbedingungen wider.
Folglich ist die Reynolds-Zahl ist keine Eigenschaft eines Fluids, sondern eine Eigenschaft einer
gegebenen Strömung dieses Fluids.
∗ Wenn die Strömungsgeschwindigkeit durch die Schwerkraft beeinflusst wird, muss deren Kräftedichte −~g im rechten Glied der inkompressiblen Navier–Stokes-Gleichung (III.34) berücksichtigt
werden. Dementsprechend tritt auf der rechten Seite der
√ dimensionslosen Gleichung (V.9) ein zu2
sätzlicher Term proportional zu 1/Fr auf, mit Fr ≡ vc / gLc der Froude-Zahl , die ein Maß für das
Verhältnis von Trägheitseffekten zu Schwereeffekten darstellt. Dann sind ~v∗ , P ∗ Funktionen von t∗ ,
~r ∗ und von den Parametern Re und Fr.
∗ Die oben diskutierte Abhängigkeit einer „abhängigen Variable“ (~v, P ) von „unabhängigen Variablen“ (t, ~r) und einem dimensionslosen Parameter (Re) stellt ein einfaches Beispiel für das allgemeine
π-Theorem von (Vaschy–)Buckingham [15] in der Dimensionsanalyse dar, vgl. z.B. [16], Kapitel 7.
V.3 Strömungen mit kleiner Reynolds-Zahl
In diesem Abschnitt werden Strömungen bei kleiner Reynolds-Zahl Re studiert, entsprechend
der Vorherrschaft der viskosen Effekte über die Effekte der Trägheit. Solche Strömungen werden
auch Stokes- oder schleichende Strömungen genannt.
V.3.1 Relevanz. Bewegungsgleichung
Die Strömungen mit kleiner Reynolds-Zahl können sehr unterschiedlicher Natur sein, da diese
Zahl drei17 physikalische Größen zusammenbindet, deren Größenordnung um viele Zehnerpotenzen
variieren kann:
• Bewegung mikroskopischer Objekte; dann spiegelt der kleine Wert der Reynolds-Zahl die kleine
Längenskala Lc wider.
– Für die Bewegung in Wasser (η ≈ 10−3 Pa·s) einer Bakterie der Größe Lc ≈ 5 µm mit der
Geschwindigkeit vc ≈ 10 µm·s−1 ist Re ≈ 5 · 10−5 : wenn die Bakterie ihre Propulsionsbewegung stoppt, wird sie sofort durch die Zähigkeit des Wassers(!) abgebremst.18 Ähnlicherweise dienen schleichende Strömungen auch der Beschreibung der Bewegung von
Reptilien in Sand [18].
– Dynamik einer Suspension von Teilchen kleiner Größe.
17
18
Die Massendichte erhält bei Fluiden etwa immer die gleiche Größenordnung.
Eine längere Diskussion der Bewegung einer Bakterie durch einen Nobelpreisträger ist in Ref. [17] zu finden.
V. Strömungen eines Newtonschen Fluids
47
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
• Bewegung geologisches Materials mit kleiner Geschwindigkeit: die kleine vc und die hohe Scherviskosität kompensieren in diesem Fall den möglich großen Wert von Lc .
Beispielsweise entspricht der Bewegung des Erdmantels19 (Lc ≈ 100 km, vc ≈ 10−5 m·s−1 ,
ρ ≈ 5 · 103 kg·m−3 und η ≈ 1022 Pa·s) eine Reynolds-Zahl Re ≈ 10−18 .
Alle diese Beispiele stellen inkompressible Strömungen dar, so dass im Folgenden die Inkompressibilität der Strömung angenommen wird. Der Einfachheit halber werden nur stationäre Strömungen
betrachtet.
Physikalisch bedeutet eine kleine Reynolds-Zahl, dass die Effekte der Trägheit venachlässigbar
~ ~v klein
gegenüber denjenigen der Viskosität sind. Dementsprechend ist der konvektive Term ~v · ∇
gegen den viskosen Term. Unter den weiteren Annahmen der Stationarität und Inkompressibilität
der Strömung vereinfacht sich dann die Navier–Stokes-Gleichung (III.33) zur Stokes-Gleichung
~ P (~r) = η4~v(~r).
∇
(V.12)
Die Navier–Stokes-Gleichung wird also linearisiert.
Unter Verwendung der Relation
~ · ~a(~r) − 4~a(~r)
~ × ~a(~r) = ∇
~ ∇
~ × ∇
∇
(V.13)
und der Definition der Wirbligkeit lässt sich die Stokes-Gleichung als
~ P (~r) = −η ∇
~ ×ω
∇
~ (~r)
(V.14)
umschreiben, wobei die Inkompressibilität der Strömung benutzt wurde. Daraus folgt dann20
4P (~r) = 0.
(V.15)
Bildet man die Rotation der Gl. (V.14), so verschwindet die linke Seite, während für den rechten
Glied die Gl. (V.13) und die Inkompressibilität zu
4~
ω (~r) = ~0
(V.16)
führen, d.h. die Wirbligkeit genügt der Poisson-Gleichung.
V.3.2 Eigenschaften der Lösungen
Aus der Linearität der Stokes-Gleichung folgen verschiedene Eigenschaften deren Lösungen:21
• Einzigartigkeit der Lösung bei gegebenen Randbedingungen.
• Überlagerbarkeit der Lösungen: wenn ~v1 , ~v2 die Gl. (V.12) lösen, dann ist λ1~v1 + λ2~v2 mit
λ1 , λ2 ∈ R ebenfalls eine Lösung, vorausgesetzt die Randbedingungen werden entsprechend
geändert. Die Reynolds-Zahl der neuen Strömung muss aber klein bleiben!
Physikalisch bedeutet die Multiplikation eines Geschwindigkeitsfeld ~v(~r) mit einer Konstante λ die
Änderung des Materienstroms, während die Stromlinien (II.1b) unverändert bleiben.
19
Mithilfe der Massendichte, der Scherviskosität und der typischen Schallgeschwindigkeit cs ≈ 5000 m·s−1 für die
Transversalwellen lässt sich eine charakteristische Zeitskala tMantel = η/ρc2s ≈ 3000 Jahre bilden. Für Bewegungen
mit einer Zeitskala tc tMantel verhält sich der Mantel wie ein Festkörper — z.B. für die Ausbreitung von Wellen
nach einem Erdbeben —, während der Mantel für Bewegungen mit einer „geologischen“ Skala tc tMantel als eine
Flüssigkeit betrachtet werden kann.
20
Trotz ihrer Einfachheit ist Gl. (V.15) in der Praxis nicht die nützlichste, da die Randbedingungen für eine
Strömung sich in den meisten Fällen auf die Geschwindigkeit beziehen, nicht auf den Druck.
21
Beweise können in Ref. [4], Kapitel 8.2.3 gefunden werden.
V. Strömungen eines Newtonschen Fluids
48
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Den Lösungen ~v(~r) und λ~v(~r) entspricht das gleiche dimensionlose Geschwindigkeitsfeld ~v∗ mit
unterschiedlichen charakteristischen Geschwindigkeiten vc bzw. λvc , die wiederum zu unterschiedlichen Reynolds-Zahlen führen. Für diese Lösungen hängt also ~v∗ [Gl. (V.11)] — und dadurchP ∗ ,
Gl. (V.12) — nicht von der Reynolds-Zahl ab, sondern nur von der Variable ~r ∗ : ~v = vc f~ ~r/Lc .
Die Tangentialspannung ist dann aus dimensionalen Gründen η∂vi /∂xj ∼ ηvc /Lc , so dass die
induzierte (Reibungs-)Kraft auf ein Objekt der Größe22 Lc proportional zu ηvc Lc ist, wie hiernach
auf ein Beispiel illustriert wird [vgl. Gl. (V.21)].
V.3.3 Strömung um eine Kugel
Eine Kugel mit dem Radius R wird in eine Flüssigkeit (Massendichte ρ, Scherviskosität η)
eingetaucht, die weit von der Kugel mit der gleichförmigen Geschwindigkeit ~v∞ strömt [Abb. V.4].
Es wird angenommen, dass Re = ρ|~v∞ |R/η klein ist, so dass die Strömung im Bereich der Kugel
als schleichend betrachtet werden kann.
~eϕ
~v∞
~er
ϕ
Abbildung V.4: Stokes-Strömung um eine Kugel.
Man sucht für die Strömungsgeschwindigkeit eine Lösung der Form ~v(~r) = ~v∞ +~u(~r), mit der
Randbedingung ~u(~r) = ~0 für |~r| → ∞. Im Folgenden wird ein Kugelkoordinatensystem mit dem
Ursprungspunkt im Zentrum der Kugel benutzt.
Dank der Linearität der Gleichung (V.16) muss ~u Lösung von
~ ×~u(~r) = ~0
4 ∇
(V.17a)
sein, sowie von
~ ·~u(~r) = 0,
∇
(V.17b)
entsprechend der Inkompressibilität der Strömung.
Um der letzteren Gleichung automatisch zu genügen, wird~u(~r) als die Rotation eines Vektorfeldes
~ (~r) gesucht. Dimensionale Betrachtungen deuten auf die Proportionalität dieses Vektorfeldes mit
V
~v∞ hin. Man macht also den Ansatz23
~ (~r) = ∇
~ × f (r)~v∞ = ∇f
~ (r) ×~v∞ ,
V
mit f (r) einer Funktion von r = |~r|, d.h. f hängt nur vom Abstand zur Kugel ab: außer der Richtung
von ~v∞ , die im Ansatz schon berücksichtigt wird, gibt es keine weitere bevorzugte Richtung, so dass
f kugelsymmetrisch ist.
~ · [f (r)~v∞ ] = ∇f
~ (r) ·~v∞
Somit gilt dank der Relation (V.13) und der Identität ∇
~ ×V
~ (~r) = ∇
~ ∇f
~ (r) ·~v∞ − 4f (r)~v∞ .
~u(~r) = ∇
(V.18)
Die Rotation des ersten Terms im rechten Glied ist null, trägt also nicht beim Einsetzen von ~u(~r)
in Gleichung (V.17a) bei:
~ ×~u(~r) = −∇
~ × 4f (r)~v∞ = −∇
~ 4f (r) ×~v∞ ,
∇
22
Wie in Abschnitt V.2 bemerkt wurde, sind die charakteristischen Skalen durch die Randbedingungen bestimmt.
~ × f (r)~v∞ wäre ~u(~r) immer senkrecht auf ~v∞ , so dass ~v(~r)
Mit dem anscheinend einfacheren Ansatz ~u(~r) = ∇
bei der Kugeloberfläche nicht verschwinden könnte.
23
V. Strömungen eines Newtonschen Fluids
49
N.BORGHINI
so dass
Hydrodynamik
Theoretische Physik IV
~ 4f (r) ×~v∞ = ~0.
4 ∇
~ 4f (r) nur eine KomDa f (r) unabhängig von den Azimutal- und Polarwinkeln ist, hat 4 ∇
ponente entlang der radialen Richtung
mit Einheitsvektor ~er , und kann somit nicht immer parallel zu
~
~v∞ sein. Deshalb muss 4 ∇ 4f (r) selbst verschwinden. Außerdem prüft man komponentenweise
~ 4f (r) = ∇
~ 4[4f (r)] nach, so dass die obige Gleichung sich als
die Identität 4 ∇
4[4f (r)] = Konstante
umschreiben lässt. Die Konstante muss Null sein, da es sich um die vierten Ableitungen von f (r) handelt, während die Geschwindigkeit ~u(~r), die nur von den zweiten Ableitungen abhängt [Gl. (V.18)],
bei r → ∞ verschwindet. Es gilt also 4[4f (r)] = 0.
In Kugelkoordinaten lautet der Laplace-Operator
∂2
2 ∂
`(` + 1)
4= 2 +
,
−
∂r
r ∂r
r2
mit ` einer ganzen Zahl, die vom Winkelanteil abhängt. Wegen der Kugelsymmetrie des Problems für
f soll hier ` = 0 genommen werden. Macht man den Ansatz 4f (r) = C/rα , so wird 4[4f (r)] = 0
nur für α = 0 or 1 erfüllt; mit Gl. (V.18) und der Bedingung ~u(~r) → ~0 für r → ∞ ist nur α = 1
möglich.
Die allgemeine Lösung der linearen Differentialgleichung
4f (r) =
d2 f (r) 2 df (r)
C
+
=
2
dr
r dr
r
(V.19a)
ist dann durch
B C
+ r
(V.19b)
r
2
gegeben, wobei die zwei ersten Terme im rechten Glied die allgemeine Lösung der assoziierten
homogenen Differentialgleichung darstellen, während der dritte Term eine spezielle Lösung der inhomogenen Gleichung ist.
Gleichungen (V.18) und (V.19) führen zum Geschwindigkeitsfeld
~v∞ − 3 ~er ·~v∞ ~er
~r
C ~r
C ~v∞ − ~er ·~v∞ ~er
C
C
~
~u(~r) = ∇ −B 3 +
·~v∞ − ~v∞ = −B
+
− ~v∞
3
r
2r
r
r
2
r
r
~v∞ − 3 ~er ·~v∞ ~er
C ~v∞ + ~er ·~v∞ ~er
−
.
= −B
3
r
2
r
Die Randbedingungen für die Strömungsgeschwindigkeit ~v(~r) = ~v∞ +~u(~r) bei der Kugeloberfläche lauten ~v(|~r| = R) = ~0, d.h.
B
C
3B
C
~v∞ +
1− 3 −
−
~er ·~v∞ ~er = ~0.
3
R
2R
R
2R
f (r) = A +
R3
6B
3R
und C = 2 =
, was führt zu
4
R
2
R3 3R ~v(~r) = ~v∞ −
~v∞ + ~er ·~v∞ ~er − 3 ~v∞ − 3 ~er ·~v∞ ~er .
4r
4r
Dies gilt für jeden ~er vorausgesetzt B =
(V.20)
Das Einsetzen dieser Strömungsgeschwindigkeit in die Stokes-Gleichung (V.12) liefert den Druck
3 ~e ·~v
P (~r) = ηR r 2 ∞ + Konstante.
2
r
Somit erhält man die mechanische Spannung (III.29) in einem Punkt der Oberfläche der Kugel.
Nach Integration ergibt sich die durch die Strömung geübte Kraft auf die Kugel
F~ = 6πRη~v∞ .
(V.21)
Dieses Resultat wird als Stokes-Gesetz bekannt.
V. Strömungen eines Newtonschen Fluids
50
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Bemerkungen:
∗ Das Geschwindigkeitsfeld für die Potentialströmung eines idealen Fluids um eine Kugel mit dem
Radius R ist24
R3 ~v(~r) = ~v∞ + 3 ~v∞ − 3 ~er ·~v∞ ~er .
2r
Die zugehörige Abnahme der Geschwindigkeit ist viel steiler als für eine Stokes-Strömung (V.20),
entsprechend dem Transport von Impuls durch die Viskosität in der Letzteren.
∗ Die Näherung einer durch die Stokes-Gleichung beschriebenen Strömung mit kleiner ReynoldsZahl gilt nur in der Nähe der Kugel.
∗ Im Limes η → 0, d.h. eines idealen Fluids, verschwindet die Kraft auf die Kugel (V.21): dies
stellt ein Beispiel vom d’Alembertschen Paradoxon dar.
∗ Der Proportionalitätsfaktor zwischen Geschwindigkeit und Kraft wird als Beweglichkeit bzw.
Mobilität µ bezeichnet. Laut Gl. (V.21) gilt für eine Kugel in einer Stokes-Strömung µ = 1/(6πRη).
In seinem berühmten Artikel über die Brownsche Bewegung [19] hat Einstein diese Beweglichkeit
mit dem Diffusionskoeffizienten D suspendierter Kugeln in einer ruhenden Flüssigkeit verknüpft:
D = µkB T =
kB T
.
6πRη
Perrin konnte diese Formel (Stokes–Einstein-Gleichung) experimentell bestätigen und dadurch die
Avogadro-Konstante bestimmen und die „diskontinuierliche Struktur der Materie“ nachweisen [20].
Literatur
• Feynman [2, 3] Kapitel 41
• Guyon et al. [4] Kapitel 4 & 8
• Landau–Lifschitz [10] Kapitel II § 15–20 & Kapitel V § 49–50
• Faber [5] Kapitel 6.
24
Dies wird z.B. in Landau–Lifschitz [10] § 10 Problem 2 gezeigt.
V. Strömungen eines Newtonschen Fluids
51
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
VI. Hydrodynamik des relativistischen Fluids
In diesem Kapitel werden die Grundlagen der Dynamik eines relativistischen Fluids in einem flachen Minkowski-Raum mit dem metrischen Tensor ηµν = diag(1, −1, −1, −1) dargelegt. Hiernach
bezeichnet x einen Punkt der Raumzeit mit den kontravarianten Koordinaten (x0 = ct, x1 , x2 , x3 )
bezüglich eines festen Bezugssystems B.
VI.1 Grundgleichungen der relativistischen Fluiddynamik
Wie in der nicht-relativistischen Hydrodynamik sind die Grundgleichungen der Dynamik eines
relativistischen Fluids Bilanzgleichungen (Abschn. VI.1.1 und VI.1.2). Um die Größen, die in den
Grundgleichungen auftreten, durch die üblichen thermodynamischen Variablen auszudrücken, ist
die Einführung einer Strömungsgeschwindigkeit nötig (Abschn. VI.1.3). Je nachdem, ob die Erhaltungsgrößen nur vom Geschwindigkeitsfeld abhängen, oder auch von dessen Gradienten, beschreiben
die Grundgleichungen ideale bzw. dissipative Fluide (Abschn. VI.1.4 und VI.1.5).
VI.1.1 Teilchenzahlerhaltung
Streng genommen ist in einer relativistischen Quanten(feld)theorie die Teilchenzahl nicht erhalten, weil die hohe kinetische Energie der Teilchen die Erzeugung von Teilchen-Antiteilchen-Paaren
ständig erlaubt, die dann wieder miteinander vernichten können. Die Differenz zwischen den Zahlen
von Teilchen und Antiteilchen kann aber konstant bleiben, wenn die Teilchen irgendeine erhaltene
additive Quantenzahl – wie z.B. eine elektrische Ladung oder eine Baryonenzahl — tragen, was
hiernach angenommen wird. Somit steht “Teilchenzahl“ in diesem Kapitel tatsächlich für NettoTeilchenzahl. Dies gilt auch für die Teilchendichte und -stromdichte.
Der Einfachheit halber befasst sich dieses Kapitel mit relativistischen Fluiden bestehend aus
einer einzigen Art von Teilchen, mit der Masse m, zusammen mit deren Antiteilchen.
Die lokale Teilchendichte n(t, ~r) im Fluid ist so definiert, dass n(t, ~r) d3~r die Anzahl von Teilchen
im Volumen d3~r um den Punkt ~r zur Zeit t ist. Da das Volumenelement d3~r vom Bezugssystem
abhängt, muss es auch der Fall für die Teilchendichte n(t, ~r) sein, damit die Teilchenzahl im Volumenelement bezugssystemunabhängig sei. Statt n(t, ~r) wird hiernach auch n(x) geschrieben.
Auf die gleiche Weise wird die Teilchenstromdichte ~(t, ~r) definiert. Zusammen bilden die beiden
einen Viererstrom N(x) mit kontravarianten Koordinaten
N µ (x) = c n(t, ~r), ~(t, ~r) .
(VI.1)
Die Erhaltung der Teilchenzahl in der Bewegung des Systems lautet dann einfach
∂µ N µ (x) = 0,
(VI.2)
∂
dem Vierergradienten.
∂xµ
Hier und im Folgenden wird die Einsteinsche Summenkonvention über doppelt auftretende LorentzIndizes benutzt.
mit ∂µ ≡
Bemerkung: Allgemeiner wird jeder unabhängigen erhaltenen Ladung ein Viererstrom J µ (x) zugeordnet, der einer ähnlichen Gleichung ∂µ J µ (x) = 0 genügt.
VI.1.2 Energieimpulserhaltung
In der Relativitätstheorie bilden Energie und Impuls die Zeit- bzw. Raumkomponenten eines
Vierervektors. Um die lokale Bilanz des Letzteren auszudrücken, müssen die Dichten und Stromdichten der Energie und des Impulses in jedem Punkt x der Raumzeit in einen Vierertensor zweiter
Stufe zusammengesetzt werden, den Energieimpulstensor T(x).
VI. Hydrodynamik des relativistischen Fluids
52
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Dieser Energieimpulstensor wird durch seine 16 kontravarianten Komponenten T µν (x) definiert:
• T 00 (x) ist die Energiedichte;
• cT 0j (x) ist die j-Komponente der Energiestromdichte, mit j = 1, 2, 3;
1 i0
•
T (x) ist die Dichte des i-Komponente des Impulses, mit i = 1, 2, 3;
c
ij
• T (x) für i, j = 1, 2, 3 ist der Impulsstromdichtetensor.
(VI.3)
Die Erhaltung des Energieimpulstensors in Abwesenheit von äußeren Kräften lautet dann
∂µ T µν (x) = 0.
(VI.4)
Dabei entspricht die Gleichung ∂µ T µ0 (x) = 0 der Energieerhaltung, während die Gleichungen
∂µ T µj (x) = 0 für j = 1, 2, 3 die Komponenten der Impulserhaltung darstellen.
Bemerkung: Man kann zeigen, ausgehend aus einer mikroskopischen Beschreibung des Fluids, dass
der Energieimpulstensor symmetrisch ist.
VI.1.3 Vierergeschwindigkeit einer Strömung. Lokales Ruhesystem
Allgemein wird die Vierergeschwindigkeit einer Strömung als ein zeitartiges Vierervektorfeld u(x)
mit dem Betrag c in jedem Punkt x definiert, d.h.
[u(x)]2 = uµ (x)uµ (x) = c2 ,
∀x,
(VI.5)
mit uµ (x) den kontravarianten Komponenten von u(x).
In jedem Punkt x der Strömung kann man dann ein Eigenbezugssystem definieren, das lokale
Ruhesystem, in dem die räumlichen Komponenten der Vierergeschwindigkeit verschwinden
uµ (x)
= (c, 0, 0, 0).
(VI.6)
LR(x)
Das lokale Ruhesystem stellt das Bezugssystem dar, in dem die thermodynamischen Variablen —
Teilchendichte n (x), Energiedichte (x) — definiert sind:
.
(VI.7)
,
(x) ≡ T 00 (x)
n (x) ≡ n(x)
LR(x)
LR(x)
Für die anderen lokalen thermodynamischen Größen wird angenommen, dass sie den gleichen Beziehungen zu n (x) und (x) genügen, als wenn das Fluid im thermodynamischen Gleichgewicht ist: der
Druck P (x) wird durch die mechanische Zustandsgleichung P (x) = P ((x), n (x)) gegeben, die Temperatur T (x) durch die thermische Zustandsgleichung, die Entropiedichte s(x) durch die Gibbs’sche
Fundamentalgleichung, usw.
Bemerkungen:
∗ Die relativistische Energiedichte weicht von der nicht-relativistischen inneren Energiedichte
e ab, denn sie beinhaltet auch die Massenenergien der Teilchen und Antiteilchen, die im nichtrelativistischen Fall nicht berücksichtigt werden.
∗ Um zwischen die bezugssystemabhängigen Größen — z.B. Teilchendichte n(x) oder Energiedichte
T 00 (x) — und den entsprechenden Größen im lokalen Ruhesystem — n (x), (x) — zu unterscheiden,
werden die Letzteren als mitbewegt bezeichnet.
Schreibt man
1
1
1
= N 0 (x)
= 2 N µ (x)uµ (x)
= 2 N µ (x)uµ (x),
LR(x)
LR(x)
LR(x)
c
c
c
so findet man, dass n (x) ein Lorentz-Skalarfeld ist. In ähnlicher Weise gilt
1
1
(x) ≡ T 00 (x)
= 2 uµ (x)T µν (x)uν (x)
= 2 uµ (x)T µν (x)uν (x),
LR(x)
LR(x)
c
c
unabhängig vom Bezugssystem.
n (x) ≡ n(x)
VI. Hydrodynamik des relativistischen Fluids
(VI.8)
(VI.9)
53
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
Sei ~v(x) die Geschwindigkeit relativ zum Bezugssystem B des lokalen Ruhesystems assoziiert
mit dem Fluidelement im Punkt x. Im Bezugssystem B lauten die kontravarianten Koordinaten der
Vierergeschwindigkeit der Strömung
uµ (x) = γ(x)c, γ(x)~v(x) ,
(VI.10)
p
mit γ(x) = 1/ 1 −~v(x)2 /c2 dem zugehörigen Lorentz-Faktor.
Jetzt werden Modelle gebraucht, um die erhaltenen Größen — Vierer-Teilchenstrom N(x) und
Energieimpulstensor T(x) — durch die Vierergeschwindigkeit u(x) und die mitbewegten thermodynamischen Größen auszudrücken.
VI.1.4 Ideales relativistisches Fluid
In einem idealen Fluid gibt es definitionsgemäß keinen dissipativen Strom. Somit kann man für
jeden Punkt x des Fluids ein Bezugssystem finden, in dem die Eigenschaften des Fluids in der Umgebung von x isotrop sind, entsprechend der Annahme des lokalen thermodynamischen Gleichgewicht.
Dieses Bezugssystem stellt dann die natürliche Wahl für das lokale Ruhesystem im Punkt x dar.
VI.1.4 a Vierer-Teilchenstrom und Energieimpulstensor eines idealen Fluids
Im lokalen Ruhesystem assoziiert mit dem Punkt x im Fluid sind die lokalen Eigenschaften des
Fluid isotrop. Daher sollen der Teilchenstrom ~(x), die Energiestromdichte cT 0j (x) in Richtung j,
und die Dichte c−1 T i0 (x) des i-Komponenten des Impulses im lokalen Ruhesystem verschwinden.
Dazu soll der Impulsstromdichtetensor T ij (x) in diesem System diagonal sein. Somit gelten
N 0 (x)
= c n (x),
~(x)
= ~0,
(VI.11a)
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
LR(x)
LR(x)
und
T 00 (x)
= (x),
LR(x)
T ij (x)
= P (x)δ ij ,
LR(x)
= T 0j (x)
T i0 (x)
LR(x)
LR(x)
∀i, j = 1, 2, 3
= 0,
(VI.11b)
∀i, j = 1, 2, 3
wobei die Definitionen (VI.7) berücksichtigt wurden, während P (x) den Druck bezeichnet. In Matrixform lautet der Energieimpulstensor (VI.11b)
(x)
0
0
0
0 P (x)
0
0
.
T µν (x) =
(VI.11c)
0
0
P (x) 0
0
0
0
P (x)
In einem allgemeinen Bezugssystem lauten die Komponenten des Vierer-Teilchenstroms bzw.
des Energieimpulstensors eines idealen Fluids
N µ (x) = n (x)uµ (x),
(VI.12a)
uµ (x) uν (x)
T µν (x) = −P (x)η µν + (x) + P (x)
.
c2
(VI.12b)
bzw.
Gleichung (VI.12a) bzw. (VI.12b) stellt eine Identität zwischen zwei kontravarianten Vierervektoren bzw. kontravarianten Tensoren zweiter Stufe dar, die sich unter Lorentz-Transformationen
identisch transformieren. Da diese Vierervektoren bzw. Tensoren in einem Bezugssystem — dem
lokalen Ruhesystem — übereinstimmen, sind sie gleich in allen Bezugssystemen.
Bemerkungen:
∗ Der Energieimpulstensor (VI.12b) ist offenbar symmetrisch. Beispielsweise bedeutet die Gleichheit T i0 = T 0i , dass 1/c mal die Energiestromdichte in Richtung i gleich c mal der i-Komponente
VI. Hydrodynamik des relativistischen Fluids
54
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
der Impulsdichte ist. Das ist in der Relativitätstheorie möglich, weil die relativistische Energiedichte
die Massenenergie einschließt.
∗ Der Energieimpulstensor (VI.12b) lässt sich noch trivial als
uµ (x) uν (x)
T µν (x) = (x)
− P (x)∆µν (x)
(VI.13a)
c2
umschreiben, wobei der Tensor
uµ (x) uν (x)
(VI.13b)
∆µν (x) ≡ η µν −
c2
eine Projektion auf den dreidimensionalen Vektorraum orthogonal auf uµ (x) bezeichnet.
Man prüft einfach die Identitäten ∆µν (x)∆ν ρ (x) = ∆µρ (x) und ∆µν (x)uν (x) = 0 nach.
∗ Gleichung (VI.12b) bzw. (VI.13a) stellt den allgemeinsten symmetrischen Tensor zweiter Stufe
dar, der mit nur der Vierergeschwindigkeit uµ (x) konstruiert werden kann.
VI.1.4
b Entropiebilanz in einem idealen Fluid
:::::::::::::::::::::::::::::::::::::::::::::
Sei jetzt s(x) die im lokalen Ruhesystem definierte Entropiedichte des Fluids.
Entropieerhaltung
Die Grundgleichungen (VI.2) und (VI.4) führen für ein ideales Fluid automatisch zur Entropieerhaltung
∂µ s(x)uµ (x) = 0,
(VI.14)
mit s(x)uµ (x) dem Vierer-Entropiestrom.
Beweis: Die Beziehung U = T S − PV + µN mit U bzw. µ der inneren Energie bzw. dem
chemischen Potential gibt für die lokalen thermodynamischen Größen = T s − P + µn . Dann
kann diese Energiedichte in den Ausdruck (VI.12b) des Energieimpulstensors eingesetzt werden
(der Kürze halber wird die Abhängigkeit nach x nicht geschrieben):
uν
uµ uν
T µν = −P η µν + (T s + µn ) 2 = −P η µν + T (suµ ) + µ(n uµ ) 2 .
c
c
Der Vierergradient ∂µ dieser Identität lautet
∂µ uν uµ uν ν
µ
µ u
∂µ T µν = −∂ ν P + T (suµ ) + µ(n uµ )
+
s∂
T
+
n
∂
µ
+
T
∂
(su
)
+
µ∂
(
n
u
)
.
µ
µ
µ
µ
c2
c2
c2
Die linke Seite dieser Gleichung verschwindet dank der Energieimpulserhaltung (VI.4). Dann
lässt sich der zweite Term in eckigen Klammern auf der rechten Seite mithilfe der Gibbs–DuhemGleichung s∂µ T + n ∂µ µ = ∂µ P umschreiben. Schließlich kann die Kontinuitätsgleichung (VI.2)
im allerletzten Term benutzt werden. Nach Multiplikation mit uν ergibt sich
ν
uν ∂µ uν
uµ uν uν µ uν u
0 = −uν ∂ ν P + T (suµ ) + µ(n uµ )
+
(∂
P
)
+
T
∂
(su
)
.
µ
µ
c2
c2
c2
Die konstante Normierung uν uν = c2 des Betragsquadrats der Vierergeschwindigkeit führt zu
uν ∂µ uν = 0 für µ = 0, . . . , 3. Somit gibt die obige Gleichung
0 = −uν ∂ ν P + (∂µ P )uµ + T ∂µ (suµ ),
so dass ∂µ (suµ ) = 0 kommt.
Isentropische Verteilung
Aus der Entropieerhaltung (VI.14) folgt die Erhaltung der Entropie pro Teilchen s(x)/n (x), mit
n (x) der mitbewegten Teilchendichte.
Beweis: Die totale Ableitung der Entropie pro Teilchen nach der Zeit lautet
∂ s
d s
~ s = 1 uµ ∂µ s ,
=
+ ~v · ∇
dt n
∂t n
n
γ
n
mit γ dem Lorentz-Faktor. Dann lässt sich der Term auf der rechten Seite einfach berechnen:
s
1 µ
s µ
1
s µ
µ
µ
u ∂µ
= u ∂µ s − 2 u ∂µ n =
u ∂µ s − u ∂µ n .
n
n
n
VI. Hydrodynamik des relativistischen Fluids
n
n
55
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Aus der Kontinuitätsgleichung ∂µ (n uµ ) = 0 folgt uµ ∂µ n = −n ∂µ uµ , so dass
1
1
1
d s
s
uµ ∂µ s + s∂µ uµ =
= uµ ∂µ
=
∂µ (suµ ) = 0,
dt n
γ
n
γn
γn
wobei die Entropieerhaltung benutzt wurde.
VI.1.5 Dissipatives relativistisches Fluid
In einem dissipativen Fluid gibt es zusätzliche Transportarten für die Teilchenzahl und den
Viererimpuls, verursacht durch die räumlichen Gradienten der Strömungsgeschwindigkeit, der Temperatur oder des chemischen Potentials. Diese neuen Transportarten lassen sich durch zusätzliche
Terme berücksichtigen, und zwar in der Form
N µ (x) = n (x)uµ (x) + nµ (x)
(VI.15a)
und
T µν (x) = (x)
uµ (x) uν (x)
− P (x)∆µν (x) + τ µν (x).
c2
(VI.15b)
Dabei sind die nµ (x) bzw. τ µν (x) die kontravarianten Komponenten eines Vierervektors n(x) bzw.
zweimal kontravarianten Tensors τ(x).
VI.1.5 a Tensoralgebra
Damit n (x) noch die mitbewegte Teilchendichte darstellt, darf n(x) im lokalen Ruhesystem keine
0-Komponente haben, vgl. Definition (VI.7). In diesem Bezugssystem gilt daher uµ (x)nµ (x) = 0,
was in allen Bezugssystemen gültig bleibt. Somit lässt sich Gl. (VI.15a) als die Zerlegung eines
Vierervektors in einen Anteil proportional zur Vierergeschwindigkeit der Strömung und einen Anteil
orthogonal dazu interpretieren. Infolgedessen gilt unter Verwendung des Projektions (VI.13b)
::::::::::::::::::::::
nµ (x) = ∆µν (x)Nν (x).
(VI.16)
Physikalisch ist n(x) der Diffusionsstrom, entsprechend dem nicht-konvektiven Strom von Teilchen.
Auf die gleiche Weise darf τ(x) keine 00-Komponente im lokalen Ruhesystem haben, damit T 00 (x)
in diesem System noch gleich der Energiedichte (x) sei. Dies hat zur Folge, dass die Komponenten
τ µν (x) nicht proportional zum Produkt uµ (x)uν (x) sein dürfen. Schreibt man den allgemeinsten
symmetrischen Tensor zweiter Stufe, der diese Bedingung erfüllt, so ist er der Form
τ µν (x) = q µ (x)uν (x) + q ν (x)uµ (x) + Πµν (x),
(VI.17a)
mit uµ (x)q µ (x) = 0, und uµ (x)Πµν (x)uν (x) = 0. Die q µ (x) sind also die Komponenten eines auf u(x)
orthogonalen Vierervektors q(x), der physikalisch die Wärmestromdichte darstellt.
Der symmetrische Tensor zweiter Stufe mit komponenten Πµν (x) lässt sich als Summe eines
spurlosen Tensors25 und einem Tensor proportional zum Projektor (VI.13b) schreiben
Πµν (x) = $µν (x) − Π(x)∆µν (x).
(VI.17b)
Die folgenden Identitäten können dann einfach nachgeprüft werden
q µ (x) = ∆µν (x)Tνρ (x)uρ (x);
1 µν
1 µ
µν
ν
ν
µ
$ (x) =
∆ ρ (x)∆ σ (x) + ∆ ρ (x)∆ σ (x) − ∆ (x)∆ρσ (x) T ρσ (x);
2
3
1 µν
P (x) + Π(x) = − ∆ (x)Tµν (x).
3
(VI.18a)
(VI.18b)
(VI.18c)
25
In der Literatur wird dieser spurlose Anteil oft als π µν (x) bezeichnet. Hier wurde auf diese Notation verzichtet,
um Verwechslung mit dem nicht-relativistischen Impulsstromdichtetensor πij eines idealen Fluids, Gl. (III.23b), zu
vermeiden.
VI. Hydrodynamik des relativistischen Fluids
56
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Der letzteren Gleichung nach spielt Π(x) eine ähnliche Rolle in der Dynamik wie der thermodynamische Druck P (x). Daher wird Π als viskoser Druck bezeichnet.
Wiederum wird $µν viskoser Schertensor gennant, denn er beschreibt den dissipativen Transport
von Energie und Impuls verursacht durch Scherdeformationen.
Bemerkung: Es seien aµν die kontravarianten Koordinaten eines beliebigen Tensors zweiter Stufe.
In der Literatur findet man die Notationen
1
a(µν) ≡ aµν + aνµ ,
2
entsprechend dem symmetrischen Anteil des Tensors, und
1 µν
<µν>
(µ ν)
a
≡ ∆ρ ∆ σ − ∆ ∆ρσ aρσ ,
3
entsprechend der symmetrisierten, spurlosen Projektion auf den Raum orthogonal zur Vierergeschwindigkeit. Unter Verwendung dieser Notationen lautet der dissipative Anteil (VI.17a)
τ µν (x) = q (µ (x)uν) (x) + $µν (x) − Π(x)∆µν (x),
während Gl. (VI.18b) zu $µν (x) = T <µν> (x) wird.
VI.1.5
b Bezugssysteme
:::::::::::::::::::::::
In einem Punkt eines dissipativen relativistischen Fluids können Netto-Teilchenzahl und Energie
in unterschiedliche Richtungen strömen, insbesondere weil Teilchen-Antiteilchen-Paare, die nicht zur
Netto-Teilchenstrom beitragen, teil der Energie transportieren können. Dementsprechend kann man
im Allgemeinen kein bevorzugtes Bezugssystem finden, in dem die lokalen Eigenschaften des Fluids
isotrop sind.
Dies hat zur Folge, dass es keine eindeutige, „natürliche“ Wahl für die Vierergeschwindigkeit u(x)
der Strömung gibt. Im Gegensatz dazu sind verschiedene Definitionen des Geschwindigkeitsfeldes
möglich, entsprechend unterschiedlichen Zusammenhängen zu den transportierten Größen:
• Eine erste Möglichkeit besteht, nach Eckart [21] die Vierergeschwindigkeit proportional zum
Vierer-Teilchenstrom anzunehmen:26
N µ (x)
uµEckart (x) ≡ p
,
(VI.19)
Nν (x)N ν (x)
so dass der Diffusionsstrom n(x) automatisch verschwindet: mit dieser Wahl ist die Teilchenerhaltung einfacher.
Ein Nachteil dieser Definition ist, dass der Netto-Teilchenzahl in einigen Bereichen einer Strömung verschwinden kann (vgl. die Diskussion in Abschn. VI.3 unten), so dass uEckart (x) dort
nicht eindeutig definiert ist.
• Hiernach wird eher die Definition nach Landau und Lifschitz benutzt, deren zufolge die Vierergeschwindigkeit mit der Energiestromdichte verknüpft ist. Ausgehend aus einer beliebigen
Vierergeschwindigkeit u(x) gilt26
T µν (x)uν (x)
uµLandau (x) ≡ p
.
uλ (x)T λ ρ (x)T ρσ (x)uσ (x)
(VI.20)
Mit dieser Definition ist die Wärmestromdichte q(x) Null, so dass der Tensor τ µν (x) sich auf
den viskosen Tensor Πµν (x) reduziert.
Dagegen wird jetzt die Wärmeleitfähigkeit eine Rolle in die Teilchenstromdichte spielen, im
Gegensatz zum nicht-relativistischen Fall.
26
In der englischsprachigen Literatur wird das lokale Ruhesystem entsprechend der Vierergeschwindigkeit (VI.19)
bzw. (VI.20) als Eckart frame bzw. Landau frame bezeichnet.
VI. Hydrodynamik des relativistischen Fluids
57
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
• Schließlich darf man natürlich mit einer allgemeinen Vierergeschwindigkeit u(x) arbeiten, und
die Felder (VI.15a)–(VI.15b) mit Diffusionsstrom und Wärmestromdichte betrachten.
VI.1.5
c Dissipative relativistische Fluiddynamik 1. Ordnung
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Es bleibt nur noch, Modelle — sog. konstitutive Gleichungen — für den Diffusionsstrom N(x),
die Wärmestromdichte q(x) und den viskosen Spannungstensor τ(x) zu finden. Um deren jeweiligen
tensoriellen Strukturen zu erhalten, kann man die Vierergradienten der Vierergeschwindigkeit, der
Temperatur und des chemischen Potentials, sowie den Projektor ∆µν verwenden. Dabei wird der
Vierergradient tatsächlich durch dessen Projektion auf den Raum orthogonal zu u(x) ersetzt,
∇µ (x) ≡ ∆µν (x)∂ν ,
(VI.21)
was im lokalen Ruhesystem im Punkt x den üblichen räumlichen Gradienten darstellt.
Im Folgenden werden nur die konstitutiven Gleichungen für den Fall dissipativer relativistischer
Fluidynamik erster Ordnung eingeführt, wobei nur Ableitungen vom Grad 1 in den dissipativen Größen auftreten, entsprechend der relativistischen Verallgemeinerung der Dynamik von Newtonschen
Fluiden.
Bezeichnet u(x) die Vierergeschwindigkeit der Strömung nach Landau, so lauten der viskose
Druck und der viskose Tensor jeweils
und27
Π(x) = −ζ∇µ (x)uµ (x)
(VI.22a)
2 µν
ρ
$ (x) = η ∇ (x)u (x) + ∇ (x)u (x) − ∆ (x) ∇ (x)uρ (x) .
3
(VI.22b)
µν
µ
ν
ν
µ
Dabei sind ζ und η die Dehn- und Scherviskosität, wie im nicht-relativistischen Fall. Wiederum ist
der Diffusionsstrom gegeben durch
n (x)2 kB T (x)2 µ
µ(x)
µ
,
(VI.22c)
n (x) = κ 2 ∇ (x)
kB T (x)
(x) + P (x)
mit κ der Wärmeleitfähigkeit.
Ein Vorteil der dissipativen relativistischen Fluidynamik erster Ordnung ist, dass sie die Navier–
Stokes-Gleichung und die zugehörige Energiebilanz ganz natürlich verallgemeinern, so dass nur drei
Transportkoeffizienten auftreten. Es wurde aber gezeigt, dass viele Lösungen der relativistischen
Navier–Stokes-Gleichungen tatsächlich instabil sind [22]: eine kleine Störung einer solchen Lösung
wächst exponentiell mit der Zeit, was zur Entstehung starker Gradienten führt, die im Rahmen der
dissipativen Fluiddynamik 1. Ordnung nicht beschrieben werden dürfen.
Folglich muss man im relativistischen Fall dissipative Fluiddynamik zweiter Ordnung — die viel
mehr Transportkoeffizienten enthält — herleiten bzw. verwenden, um das Stabilitätsproblem zu
vermeiden.
Bemerkung: Prinzipiell ist Stabilität kein Problem, auch in dissipativer relativistischer Fluiddynamik 1. Ordnung, wenn man mit einer analytischen Lösung der Bewegungsgleichungen arbeitet.
Nur sehr wenige solche analytische Lösungen sind aber bekannt, und bei numerischen Lösungen ist
das Problem fast unvermeidbar.
VI.2 Nicht-relativistischer Limes
Dieser Abschnitt befasst sich mit dem nicht-relativistischen Limes |~v| c der Grundgleichungen (VI.2), (VI.4) und (VI.14) für ein ideales Fluid. In diesem Limes stimmt die Netto-Teilchendichte
27
Mit der in der Bemerkung am Ende des Paragraphs VI.1.5 a eingeführten Notation gilt $µν (x) = 2η∂ <µ (x)uν> (x).
VI. Hydrodynamik des relativistischen Fluids
58
N.BORGHINI
Theoretische Physik IV
Hydrodynamik
n (x) mit der Teilchendichte überein, weil Teilchen-Antiteilchen-Paarerzeugung vernachlässigbar
wird, so dass es praktisch keine Antiteilchen im Fluid geben kann. Dementsprechend kann man
einfach die Energiedichte als Summe eines Massenanteils — proportional zur Teilchendichte —
und eines kinetischen Anteils schreiben, wobei der Letztere definitionsgemäß die innere Energiedichte
e des Fluids ist:
(x) = e(x) + n (x)mc2 = e(x) + ρ(x)c2 ,
(VI.23)
mit ρ(x) der Massendichte. Schließlich gilt für den Lorentzfaktor
~v(x)4
1 ~v(x)2
+O
.
γ(x) ≈ 1 +
2 c2
c4
(VI.24)
Der Kürze halber wird die x- bzw. (t, ~r)-Abhängigkeit der Felder hiernach nicht geschrieben.
VI.2.1 Teilchenzahlerhaltung
Zur führenden Ordnung in ~v2 /c2 lautet die Vierergeschwindigkeit der Strömung uµ ≈ (c,~v), was
für den erhaltenen Teilchenstrom (VI.12a) zu N µ ≈ (n c, n~v) führt.
Daher lautet die Teilchenzahlerhaltung (VI.2)
3
1 ∂(n c) X ∂(n vi )
∂n ~
0 = ∂µ N ≈
+
=
+ ∇ · (n ~v),
i
c ∂t
∂x
∂t
µ
(VI.25)
i=1
d.h. man findet die Kontinuitätsgleichung (III.8) wieder.
VI.2.2 Energieimpulserhaltung
Die Taylor-Entwicklung der Komponenten des Energieimpulstensors (VI.12b) bis zur Ordnung
O(|~v|/c) gibt unter Berücksichtigung der Gl. (VI.23)
2
~v
T 00 = −P + γ 2 (ρc2 + e + P ) = ρc2 + e + ρ~v2 + O 2
(VI.26a)
c
3
j
vj
|~v|
2 v
0j
j0
2
2
j
T = T = γ (ρc + e + P ) = ρcv + e + P + ρ~v
+O 3
(VI.26b)
c
c
c
2
2
~v
~v
vi vj
ij
ij
2
2
ij
i j
T = P δ + γ (ρc + e + P ) 2 = P δ + ρ v v + O 2 = πij + O 2 ,
(VI.26c)
c
c
c
wobei in der letzten Zeile der dreidimensionale Impulsstromdichtetensor πij eines idealen Fluids,
Gl. (III.23b), eingeführt wurde.
Die Impulserhaltung ∂µ T µj = 0 lässt sich mithilfe der Gl. (VI.26b), (VI.26c) als
3
3
1 ∂(ρcvj ) X ∂πij
|~v|
∂(ρvj ) X ∂πij
|~v|
0=
+
+
O
=
+
+
O
(VI.27)
c ∂t
∂xi
c
∂t
∂xi
c
i=1
i=1
umschreiben, was genau die Gl. (III.24) darstellt, die äquivalent zur Euler-Gleichung in Abwesenheit
äußerer Kräfte ist.
Wiederum entspricht die Energiebilanz der Komponente ν = 0 der Gl. (VI.4), ∂µ T µ0 = 0. Die
relativistische Energie enthält aber, neben der nicht-relativistischen inneren Energie, die Massenenergie, vgl. Gl. (VI.23). Um den nicht-relativistischen Limes der Energieerhaltung zu erhalten,
soll man also n mc2 = ρc2 von abziehen. Diese Subtraktion lässt sich Lorentz-invariant durchführen, indem man bemerkt, dass − ρc2 die 0-Komponente im lokalen Ruhesystem des Vierervektors
T µ0 − ρcuµ darstellt. Statt ∂µ T µ0 = 0 muss die Gleichung ∂µ (T µ0 − ρcuµ ) = ∂µ T µ0 − mc ∂µ N µ = 0
als Anfangspunkt genommen werden. Unter Nutzung der Taylor-Entwicklungen
2
~v
1
ρcu0 = γρc2 = ρc2 + ρ~v2 + O 2
2
c
VI. Hydrodynamik des relativistischen Fluids
59
N.BORGHINI
Hydrodynamik
und
j
j
j
ρcu = γρcv = ρcv +
Theoretische Physik IV
5
|~v|
1 2 vj
ρ~v
+O 3
2
c
c
findet man
0 = ∂µ (T
µ0
2
X
j
3
1 2
~v
1∂ 1 2
v
∂
+O 2 ,
− ρcu ) =
ρ~v + e +
ρ~v + e + P
j
c ∂t 2
∂x
2
c
c
µ
j=1
d.h.
2
~v
∂ 1 2
1 2
~
= 0.
ρ~v + e + ∇ ·
ρ~v + e + P ~v + O
∂t 2
2
c
(VI.28)
Damit wird also die Gl. (III.35) bewiesen.
VI.2.3 Entropieerhaltung
Mit der Näherung uµ ≈ (c, ~v ) lautet die Entropieerhaltung (VI.14)
3
0 = ∂µ (suµ ) ≈
∂s ~
1 ∂(sc) X ∂(svi )
+
=
+ ∇ · (s~v),
i
c ∂t
∂x
∂t
(VI.29)
i=1
d.h. man findet genau die nichtrelativistische Gleichung (III.36).
VI.3 Beispiel einer relativistischen Strömung: Bjorken flow
kommt später
[23]
Literatur
• Landau–Lifschitz [10], Kapitel XV, § 133,134 (ideales Fluid) und § 136 (viskoses Fluid)
• Weinberg [24], Kapitel 2, § 10 (ideales Fluid) und § 11 (viskoses Fluid)
• Andersson & Comer [25]
• Für die Anwendung der relativistischen Fluiddynamik zur Beschreibung von Schwerionenkollisionen s. Ollitrault [26] oder Romatschke [27] (mit einer Einführung in die Fluiddynamik
eines dissipativen Fluids).
VI. Hydrodynamik des relativistischen Fluids
60
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
Literaturverzeichnis
[1] M. Reiner, Phys. Today 17(1) (1964) 62.
[2] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume II :
Mainly Electromagnetism and Matter , definitive Aufl. (Addison Wesley, Reading, 2005).
[3] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 2 : Elektromagnetismus und Struktur der Materie, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München,
2007).
[4] E. Guyon, J.-P. Hulin, L. Petit, C. D. Mitescu, Physical hydrodynamics (University Press,
Oxford, 2001).
[5] T. E. Faber, Fluid dynamics for physicists (University Press, Cambridge, 1995).
[6] L. Landau, E. Lifschitz, Lehrbuch der theoretischen Physik. Band VII : Elastizitätstheorie, 5.
Aufl. (Harri Deutsch, Frankfurt am Main, 1991).
[7] R. E. Graves, B. M. Argrow, J. Thermophys. Heat Tr. 13 (1999) 337–342.
[8] R. K. Agarwal, K.-Y. Yun, R. Balakrishnan, Phys. Fluids 13 (2001) 3061–3085.
[9] P. Hertel, Theoretische Physik (Springer, Berlin & Heidelberg, 2007).
[10] L. Landau, E. Lifschitz, Lehrbuch der theoretischen Physik. Band VI : Hydrodynamik , 5. Aufl.
(Harri Deutsch, Frankfurt am Main, 1991).
[11] T. Fließbach, Lehrbuch zur theoretischen Physik I. Mechanik , 4. Aufl. (Spektrum Akademischer
Verlag, Heidelberg & Berlin, 2003).
[12] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume I : Mainly
Mechanics, Radiation, and Heat, definitive Aufl. (Addison Wesley, Reading, 2005).
[13] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 1 : Mechanik, Strahlung, Wärme, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München, 2007).
[14] O. Reynolds, Phil. Trans. R. Soc. Lond. 174 (1883) 935–982.
[15] E. Buckingham, Phys. Rev. 4 (1914) 345–376.
[16] F. Durst, Grundlagen der Strömungsmechanik (Springer, Berlin & Heidelberg, 2006).
[17] E. M. Purcell, Am. J. Phys. 45 (1977) 3–11.
[18] N. Cohen, J. H. Boyle, Contemp. Phys. 51 (2010) 103–123 [arXiv:0908.2769].
[19] A. Einstein, Annalen Phys. 17 (1905) 549–560.
[20] J. Perrin, Discontinuous structure of matter, 1926.
[21] C. Eckart, Phys. Rev. 58 (1940) 919–924.
[22] W. A. Hiscock, L. Lindblom, Phys. Rev. D 31 (1985) 725–733.
[23] J. Bjorken, Phys. Rev. D 27 (1983) 140–151.
[24] S. Weinberg, Gravitation and Cosmology (John Wiley & Sons, New York, 1972).
VI. Hydrodynamik des relativistischen Fluids
61
N.BORGHINI
Hydrodynamik
Theoretische Physik IV
[25] N. Andersson, G. L. Comer, Living Rev. Rel. 10 (2005) 1–87 [arXiv:gr-qc/0605010].
[26] J.-Y. Ollitrault, Eur. J. Phys. 29 (2008) 275–302 [arXiv:0708.2433].
[27] P. Romatschke, Int. J. Mod. Phys. E 19 (2010) 1–53 [arXiv:0902.3663].
62
Teil B
Elektrodynamik einer Punktladung
Version vom 18. Juli 2013, 9:54
63
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
VII. Wiederholung zum Elektromagnetismus
Dieses Kapitel beginnt mit einem Überblick über die Grundlagen des Elektromagnetismus. Dann
wird die relativistische Formulierung der Elektrodynamik dargelegt.
VII.1 Grundlagen der klassischen Elektrodynamik
Hiernach werden die Grundlagen der klassischen Elektrodynamik im Ortsraum dargelegt.28
VII.1.1 Dynamische Variablen
Bewegte elektrisch geladene Teilchen erzeugen ein elektromagnetisches Feld, das wiederum die
Bahnkurven der Teilchen beeinflusst. Zur Beschreibung eines solchen Systems sind die dynamischen
Variablen
X
• Ladungsdichte ρ(t, ~r) =
qi ni (t, ~r) mit n i der Dichte der Teilchen der Spezies i mit der
elektrischen Ladung qi ; i
X
• Stromdichte ~(t, ~r) =
qi n i (t, ~r)~vi (t, ~r) mit ~vi der mittleren Geschwindigkeit der Teilchen
i
der Spezies i;
~ ~r);
• Elektrisches Feld E(t,
~ ~r).
• Magnetisches Feld (bzw. magnetische Induktion oder magnetische Flussdichte) B(t,
Bemerkung: Hier ist ~r keine dynamische Variable, sondern nur ein kontinuierlicher Parameter, der
die Feldvariablen parametrisiert, genauso wie i die Teilchenvariablen kennzeichnet.
VII.1.2 Maxwell–Lorentz-Gleichungen
~ B)
~ in Anwesenheit der durch die
Die Maxwell-Gleichungen für das elektromagnetische Feld (E,
Ladungs- bzw. Stromdichte ρ bzw. ~ beschriebenen Quellen lauten
~ · E(t,
~ ~r) = 1 ρ(t, ~r)
∇
0
~
~
∇ · B(t, ~r) = 0
~
~ × E(t,
~ ~r) + ∂ B(t, ~r) = ~0
∇
∂t
~
~ × B(t,
~ ~r) − 1 ∂ E(t, ~r) = 1 ~(t, ~r).
∇
c2
∂t
0 c2
(VII.1a)
(VII.1b)
(VII.1c)
(VII.1d)
Kombiniert man die Gl. (VII.1a) und (VII.1d) zusammen, so erkennt man, dass die Ladungsund Stromdichte der Kontinuitätsgleichung
∂ρ(t, ~r) ~
+ ∇ · ~(t, ~r) = 0,
∂t
(VII.2)
genügen, welche die lokale Formulierung der Erhaltung der elektrischen Ladung darstellt.
Schließlich lautet die Lorentz-Kraftdichte auf die Teilchen der Spezies i
~ ~r) +~vi (t) × B(t,
~ ~r) .
f~i (t, ~r) = qi n i (t, ~r) E(t,
(VII.3)
28
Für die Formulierung der klassischen Elektrodynamik im Fourier-Raum der Wellenvektoren, die sich für die
Quantisierung der Theorie besonders eignet, s. z.B. Ref. [1].
VII. Wiederholung zum Elektromagnetismus
65
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Besteht das System von Teilchen aus einer einzigen Punktladung, so wird die Teilchendichte
durch n i (t, ~r) = δ (3) (~r − ~xi (t)) gegeben, mit ~xi (t) der Position zur Zeit t der Ladung, so dass
ρ(t, ~r) = qi δ (3) (~r − ~xi (t)),
~(t, ~r) = qi~vi (t) δ
(3)
(~r − ~xi (t))
mit ~vi (t) der Geschwindigkeit der Punktladung, während die Lorentz-Kraft durch
Z
~
~ ~xi (t)) + ~vi (t) × B(t,
~ ~xi (t))
Fi (t) = d3~r f~i (t, ~r) = qi E(t,
(VII.4a)
(VII.4b)
(VII.5)
gegeben ist.
Die Gleichungen (VII.1), (VII.4) und (VII.5) bilden einen Satz gekoppelter Gleichungen für
~ ~r), B(t,
~ ~r), ~xi (t), ~vi (t)}, die den Zustand zur Zeit t des Systems
die dynamischen Variablen {E(t,
{Punktladung + elektromagnetisches Feld} bestimmen.
Bemerkungen:
∗ Die Maxwell-Gleichungen (VII.1) sind partielle Differentialgleichungen, d.h. die Zeitableitungen
der Felder im Punkt ~r hängen nicht nur von den Feldern in diesem Punkt ab, sondern auch von
deren räumlichen Ableitungen.
∗ Um die Felder in einem Bereich festzulegen, sind auch Randbedingungen nötig.
VII.1.3 Potentiale. Eichungen
~ ~r) und B(t,
~ ~r) können durch ein skalares Potential φ(t, ~r) und ein Vektorpotential
Die Felder E(t,
~
A(t, ~r) ausgedrückt werden:
~ ~r)
∂ A(t,
~ ~r) = −∇φ(t,
~
E(t,
~r) −
,
(VII.6a)
∂t
~ ~r) = ∇
~ × A(t,
~ ~r).
B(t,
(VII.6b)
Dies deutet darauf hin, dass die 6 Komponenten des elektromagnetischen Felds in jedem Punkt ~r
~ ~r) nur 4 reelle Skalare darstellen.
redundant sind, da die Potentialen φ(t, ~r) und A(t,
Setzt man diese Identitäten in die Maxwell–Gauß- und Maxwell–Ampère-Gleichungen (VII.1a)
bzw. (VII.1d) ein, so erhält man die folgenden Bewegungsgleichungen für die Potentiale
1
∂~ ~
ρ(t, ~r) − ∇
· A(t, ~r),
0
∂t
1
1 ∂φ(t, ~r) ~ ~
~
~
A(t, ~r) =
~(t, ~r) − ∇ 2
+ ∇ · A(t, ~r) ,
0 c2
c
∂t
4φ(t, ~r) = −
(VII.7a)
(VII.7b)
1 ∂2
− 4 dem d’Alembert-Operator.
c2 ∂t2
Diese Gleichungen sind partielle Differentialgleichungen zweiter Ordnung, während die MaxwellGleichungen erster Ordnung sind.
mit ≡
Eichinvarianz
:::::::::::::
~ B)
~ und dadurch die Elektrodynamik bleiben invariant unter der EichtransDie Maxwell-Felder (E,
formation
∂χ(t, ~r)
φ(t, ~r) → φ0 (t, ~r) = φ(t, ~r) +
,
(VII.8a)
∂t
~ ~r) → A
~ 0 (t, ~r) = A(t,
~ ~r) − ∇χ(t,
~
A(t,
~r)
(VII.8b)
mit χ(t, ~r) einer beliebigen skalaren Funktion von Ort und Zeit. Somit kann man χ(t, ~r) so wählen,
dass die Gleichungen für die Potentiale irgendeine Symmetrie besitzen oder einfacher werden.
VII. Wiederholung zum Elektromagnetismus
66
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Zwei oft benutzte Eichungen sind die (Lorentz-invariante) Lorenz-Eichung
~ · A(t,
~ ~r) + 1 ∂φ(t, ~r) = 0,
∇
c2 ∂t
(VII.9)
~ · A(t,
~ ~r) = 0,
∇
(VII.10)
und die Coulomb-Eichung
die unter einer Lorentz-Transformation nicht erhalten ist.
In der Lorenz-Eichung lässt sich Gl. (VII.7a) als φ(t, ~r) = ρ(t, ~r)/0 umschreiben, während der
zweite Glied auf der rechten Seite von Gl. (VII.7b) verschwindet. Dann nehmen die zwei Gleichungen
eine symmetrische Form an.
ρ(t, ~r)
In der Coulomb-Eichung vereinfacht sich Gl. (VII.7a) zur Poisson-Gleichung 4φ(t, ~r) = −
0
der Elektrostatik.
Bemerkung: Die Lorenz-Eichung ist „unvollständig“, indem die Potentiale durch die Bedingung
~ der Bedingung (VII.9) genügen, dann erfüllen
nicht völlig festgelegt werden. Wenn Potentiale (φ, A)
~ 0 ) ebenfalls die Bedingung, wenn χ eine
die nach Gl. (VII.8) eichtransformierten Potentiale (φ0 , A
harmonische Funktion [χ(t, ~r) = 0] ist.
VII.1.4 Energieimpulstensor
Die Dichte und Stromdichte der Energie bzw. des Impulses des elektromagnetischen
gegeben durch
i
0 h ~
~ ~r)2
E(t, ~r)2 + c2 B(t,
• Energiedichte des Felds: eem (t, ~r) =
2
~ ~r) = 1 E(t,
~ ~r) × B(t,
~ ~r)
• Energiestromdichte (Poynting-Vektor ): S(t,
µ0
~ ~r) × B(t,
~ ~r)
• Impulsdichte: ~gem (t, ~r) = 0 E(t,
ij
• Impulsstromdichte: Tem
(t, ~r) = 0 Ei (t, ~r)Ej (t, ~r) + c2 Bi (t, ~r)Bj (t, ~r)
1 ~2
2
2~
.
− δij E (t, ~r) + c B(t, ~r)
2
Felds sind
(VII.11a)
(VII.11b)
(VII.11c)
(VII.11d)
ij
Bemerkung: Tem
wird auch als Spannungstensor des elektromagnetischen Felds bezeichnet. Die
hier benutzte Vorzeichenkonvention für diesen Tensor ist nicht universell.
VII.1.5 Einheiten
In dieser Vorlesung werden die Einheiten des SI-Systems benutzt. Dann gelten
• Lichtgeschwindigkeit c = 299792458 m·s−1
1
≈ 8, 854 · 10−12 F·m−1
µ0 c2
• Vakuumpermeabilität µ0 = 4π × 10−7 N·A−2
• Permittivität des Vakuums 0 =
(VII.12)
µ0 wird auch magnetische Feldkonstante genannt.
Im Gauß’schen Einheitensystem wird die Einheit der elektrischen Ladung so definiert, dass
die Coulomb-Kraft durch qq 0 /r2 gegeben wird. Damit erhalten elektrisches und magnetisches
Feld identische Einheiten und die Maxwell-Gleichungen lauten [der Kürze halber wird die (t, ~r)Abhängigkeit der Felder nicht geschrieben]
~ ·E
~ = 4πρ,
∇
~ ·B
~ = 0,
∇
VII. Wiederholung zum Elektromagnetismus
67
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
~
~ ×E
~ + 1 ∂ B = 0,
∇
c ∂t
~
~ ×B
~ − 1 ∂ E = 4π ~.
∇
c ∂t
c
Die Kontinuitätsgleichung bleibt der Form (VII.2) und die Lorentz-Kraft auf eine Punktladung
qi ist gegeben durch
~vi
~
~
~
Fi = qi E +
×B .
c
Eine Formulierung der Maxwell-Gleichungen unabhängig vom Einheitensystem wird in Ref. [2]
dargelegt.
VII.2 Kovariante Formulierung der Elektrodynamik
Hiernach bezeichnet x einen Punkt der Raumzeit mit kontravarianten Koordinaten xµ . Die
Einsteinsche Summenkonvention über doppelt auftretende Lorentz-Indizes wird benutzt.
VII.2.1 Viererstrom
Die Ladungs- und Stromdichte bilden einen Viererstrom mit kontravarianten Koordinaten
j µ (x) = cρ(x), ~(x) .
(VII.13)
Damit lässt sich die Kontinuitätsgleichung (VII.2) umschreiben als
∂µ j µ (x) = 0.
(VII.14)
Bemerkung: In Gl. (VII.13) bezeichnen ρ(x) und ~(x) die Größen in einem festen Bezugssystem,
das sich möglicherweise relativ zu den Ladungen bewegt. Für eine Punktladung mit der Vierergeschwindigkeit uµ lautet der Viererstrom
j µ (x) = ρ0 (x) uµ (x),
mit ρ0 (x) der Ladungsdichte im Ruhesystem der Ladung.
VII.2.2 Feldstärketensor
Um eine relativistisch kovariante Größe zu erhalten, werden das elektrische und das magnetische
Feld zum elektromagnetischen Feldstärketensor kombiniert. Letzterer wird durch
• F 00 (x) = F ii (x) = 0,
Ei (x)
,
c
3
X
• F ij (x) = −F ji (x) ≡ −
ijk Bk (x)
• F i0 (x) = −F 0i (x) ≡
(VII.15)
k=1
ijk
definiert, mit
= ijk dem völlig antisymmetrischen Levi-Civita-Tensor dritter Stufe. F µν (x) ist
deutlich antisymmetrisch.
In Matrixdarstellung gilt
E1 (x)
E2 (x)
E3 (x)
−
−
−
0
c
c
c
E1 (x)
0
−B3 (x)
B2 (x)
c
µν
F (x) =
(VII.16)
.
E2 (x)
B3 (x)
0
−B1 (x)
c
E3 (x)
−B2 (x)
B1 (x)
0
c
VII. Wiederholung zum Elektromagnetismus
68
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Mit dem Viererstrom (VII.13) und dem elektromagnetischen Feldstärketensor (VII.15) lauten
die Maxwell-Gleichungen
1 ν
j (x) ∀ν,
0 c2
∂ µ F νρ (x) + ∂ ν F ρµ (x) + ∂ ρ F µν (x) = 0 ∀µ, ν, ρ.
∂µ F µν (x) =
(VII.17a)
(VII.17b)
Die Lorentz-Kraft auf eine Punktladung q mit der Vierergeschwindigkeit uµ (x) = (γc, γ~v (x)) im
elektromagnetischen Feld ist gegeben durch
dpµ (x)
= qF µν (x)uν (x),
(VII.18)
dτ
mit τ = t/γ der Eigenzeit der Ladung.
Der völlig antisymmetrische Levi-Civita-Tensor 4. Stufe wird definiert durch29
+1 falls (α, β, γ, δ) eine gerade Permutation von (0,1,2,3) ist,
αβγδ
= −1 falls (α, β, γ, δ) eine ungerade Permutation von (0,1,2,3) ist,
0
sonst.
(VII.19)
Für diesen Tensor gilt 0123 = −0123 .
Mithilfe des Levi-Civita-Tensors definiert man den dualen Feldstärketensor für das elektromagnetische Feld, dessen kovariante Komponenten lauten
0
B1 (x)
B2 (x)
B3 (x)
E2 (x)
E3 (x)
−B1 (x)
−
0
1
c
c
ρσ
,
F̃µν (x) = µνρσ F (x) =
(VII.20)
E
(x)
E
(x)
1
2
−B2 (x) − 3
0
c
c
E2 (x)
E1 (x)
−B3 (x)
−
0
c
c
entsprechend dem Austausch von Ei /c und −Bi bezüglich F µν .
Unter Verwendung des dualen Feldstärketensors lassen sich die homogenen Maxwell-Gleichungen
(VII.17b) umschreiben als
∂µ F̃ µν (x) = 0 ∀ν.
(VII.21)
Bemerkungen:
∗ Der duale Feldstärketensor ist deutlich antisymmetrisch.
∗ Invarianten
des elektromagnetischen Felds
::::::::::::::::::::::::::::::::::::::::
Durch Kontraktionen lassen sich zwei Größen finden, die sich unter Lorentz-Transformationen nicht
ändern:
~
~
~ 2
E(x)
E(x)
· B(x)
µν
2
~
und
F̃µν (x)F µν (x) = −4
.
(VII.22)
Fµν (x)F (x) = 2 B(x) −
2
c
c
VII.2.3 Viererpotential
~ bilden einen Potential-Vierervektor mit den
Das skalare Potential φ und das Vektorpotential A
kontravarianten Komponenten
φ(x) ~
µ
A (x) =
, A(x) .
(VII.23)
c
29
Die Vorzeichenkonvention ist hier auch nicht universell: manchmal wird 0123 = +1 genommen.
VII. Wiederholung zum Elektromagnetismus
69
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Der elektromagnetische Feldstärketensor (VII.15) wird dann gegeben durch
F µν (x) = ∂ µ Aν (x) − ∂ ν Aµ (x).
(VII.24)
Dementsprechend stellen
Ei
= F i0 = ∂ i A0 − ∂ 0 Ai = −∂i A0 − ∂0 Ai
c
1 X ijk jk
Bi = −
F = −ijk ∂ j Ak = ijk ∂j Ak
2
j,k
jeweils die i-Komponente der Gleichung (VII.6a) und (VII.6b) dar.
Setzt man Gl. (VII.24) in die inhomogenen Maxwell-Gleichungen (VII.17a) ein, so findet man
die Bewegungsgleichung für die Potentiale lauten
∂µ ∂ µ Aν (x) ≡ Aν (x) =
1 ν
j (x) + ∂ ν ∂µ Aµ (x) ∀ν,
0 c2
(VII.25)
in Übereinstimmung mit den Gleichungen (VII.7).
Bemerkung: Die Beziehung (VII.24) gibt F̃µν (x) = 21 µνρσ F ρσ (x) = µνρσ ∂ ρ Aσ (x), woraus die
homogene Gleichung ∂ µ F̃µν (x) = µνρσ ∂ µ ∂ ρ Aσ (x) = 0 sofort folgt.
VII.2.4 Eichtransformation
In kovarianter Schreibweise lautet die Eichtransformation (VII.8)
µ
Aµ (x) → A0 (x) = Aµ (x) + ∂ µ χ(x),
(VII.26)
mit χ(x) einer skalaren Funktion. Die Lorenz-Eichung-Bedingung (VII.9) lässt sich dann einfach
umschreiben als
∂µ Aµ (x) = 0,
(VII.27)
woraus ihre Lorentz-Kovarianz deutlich ist. In dieser Eichung vereinfachen sich die Bewegungsgleichungen (VII.25) für das Viererpotential zu
Aν (x) =
1 ν
j (x) ∀ν.
0 c2
(VII.28)
Bemerkung: Die Beziehung (VII.24) zeigt sofort, dass der elektromagnetische Feldstärketensor
F µν eichinvariant ist.
VII.2.5 Energieimpulstensor
ij
~ ~gem und Tem
Zusammen bilden die Größen eem , S,
in Gl. (VII.11) den Energieimpulstensor T µν
des elektromagnetischen Felds. In Matrixdarstellung wird dieser gegeben durch
eem (x)
c~gem (x)
µν
.
T (x) = S(x)
(VII.29)
~
ij
−Tem (x)
c
Der Energieimpulstensor lässt sich durch den Feldstärketensor ausdrücken:
1
1 µν
µν
µ
ρν
ρσ
T (x) =
F ρ (x)F (x) + η Fρσ (x)F (x) .
µ0
4
(VII.30)
In dieser Form prüft man einfach, dass dieser Tensor symmetrisch ist.
VII. Wiederholung zum Elektromagnetismus
70
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Literatur
• Feynman [3, 4] Kapitel 18, 25, 27 & 31.8
• Fließbach [5] Kapitel 18
• Griffiths [6] Kapitel 12.3
• Jackson [7] Kapitel 6.1-6.3 & 11.9
• Landau–Lifschitz [8] Kapitel III § 16-18 & 23-25
• Nolting [9] Kapitel 1.1, [10] Kapitel 2.3.
VII. Wiederholung zum Elektromagnetismus
71
N.BORGHINI
Theoretische Physik IV
Elektrodynamik einer Punktladung
VIII. Lagrange-Formulierung der Elektrodynamik
In diesem Kapitel wird gezeigt, dass die Maxwell–Lorentz-Gleichungen der Elektrodynamik sich aus
einem Extremalprinzip herleiten lassen. Dabei wird einem System bestehend aus Punktladungen
in einem elektromagnetischen Feld eine Lagrange-Funktion LM + LF + LM+F zugeordnet, wobei
die drei Beiträge jeweils die freien Punktladungen, das freie Feld und deren Wechselwirkungterm
beschreiben.
VIII.1 Freie Punktladung
Die Lagrange-Funktion eines freien Teilchens der Masse m ist
r
~v (t)2
LM ~x(t), ~v (t) = −mc2 1 − 2 ,
c
(VIII.1)
mit ~x(t) bzw. ~v (t) der Position bzw. der Geschwindigkeit des Teilchens in einem festen Bezugssystem.
Integriert man diese Lagrange-Funktion nach der Zeit entlang einer Bahn ~x(t), so ergibt sich die
Wirkung
Z tb
Z τb
2
SM =
LM ~x(t), ~v (t) dt = −mc
dτ,
(VIII.2)
ta
τa
wobei τ die Eigenzeit im des Teilchens bezeichnet.
Die eigentliche Bahnkurve ergibt sich gemäß dem Hamilton-Prinzip aus der Extremierung der
Wirkung, die zur üblichen Euler–Lagrange-Gleichung führt
∂LM ~x(t), ~v (t)
d ∂LM ~x(t), ~v (t)
=
,
(VIII.3)
dt
∂~v
∂~x
d~
p ~
die für die Lagrange-Funktion (VIII.1) einfach
= 0 lautet, in Übereinstimmung mit dem zweiten
dt
Newtonschen Gesetz, mit
∂LM ~x(t), ~v (t)
m~v (t)
p~ ≡
=p
(VIII.4)
∂~v
1 − ~v (t)2 /c2
dem zu ~x kanonisch konjugierten Impuls.
VIII.2 Punktladung in einem elektromagnetischen Feld
Sei jetzt ein geladenes Punktteilchen mit Masse m und elektrischer Ladung q, das sich in einem
äußeren elektromagnetischen Feld bewegt.
Die Lagrange-Funktion für den Wechselwirkungsterm zwischen dem Feld, beschrieben durch
~ ~r), und der Punktladung lautet [11]
Potentiale φ(t, ~r) und A(t,
~ t, ~x(t) = −q dxµ (t) Aµ t, ~x(t) ,
LM+F ~x(t), ~v (t) = −qφ t, ~x(t) + q~v (t) · A
dt
(VIII.5)
mit Aµ (t, ~r) den kontravarianten Komponenten des Viererpotentials.
Diese Lagrange-Funktion liefert die Wirkung
Z tb
Z b
Z
µ
SM+F =
LM+F ~x(t), ~v (t) dt = −q A t, ~x(t) dxµ = −q
ta
a
τb
uµ (t)Aµ t, ~x(t) dτ,
(VIII.6)
τa
mit uµ (t) den kovarianten Koordinaten der Vierergeschwindigkeit des Teilchens. Diese Wirkung ist
deutlich Lorentz-invariant, wie die Wirkung (VIII.2) des freien Teilchens, was aber nicht der Fall
der zugehörigen Lagrange-Funktionen ist.
VIII. Lagrange-Formulierung der Elektrodynamik
72
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Der kanonische Impuls der Punktladung im Feld folgt aus der üblichen Definition, angewandt
auf die gesamte Lagrange-Funktion L(1) = LM + LM+F :
(1) ~
∂L
x
(t),
~
v
(t)
m~v (t)
~ ≡
~ t, ~x(t) .
Π
+ qA
(VIII.7)
=p
∂~v
1 − ~v (t)2 /c2
Der erste Term im rechten Glied ist der kinetische Impuls p~ der Punktladung.
~ t, ~x(t)
~ t, ~x(t)
dA
∂A
~ t, ~x(t) mit der Ableitung
~ A
Kombiniert man die Identität
=
+ ~v (t) · ∇
dt
∂t
(1)
∂L ~x(t), ~v (t)
~
~ ~v (t) · A
~ t, ~x(t) ,
= −q ∇φ(t,
~x) + q ∇
∂~x
∂L(1) ~x(t), ~v (t)
d ∂L(1) ~x(t), ~v (t)
so führt die Euler–Lagrange-Gleichung
=
zu
dt
∂~v
∂~x
"
#
~ t, ~x(t)
∂A
m~v (t)
d
~ t, ~x(t) − ∇φ
~ t, ~x(t) + ∇
~ ~v (t) · A
~ t, ~x(t) .
~ A
p
=q −
− ~v (t) · ∇
dt
∂t
1 − ~v (t)2 /c2
~ × A)
~ = ∇(~
~ v · A)
~ − (~v · ∇)
~ A.
~ Mit den
Aus der Formel für das doppelte Kreuzprodukt folgt ~v × (∇
Beziehungen (VII.6) ergibt sich dann
h
i
d~
p
~ t, ~x(t) + ~v (t) × B
~ t, ~x(t) ,
(VIII.8)
=q E
dt
d.h. die Zeitableitung des kinetischen Impulses der Punktladung ist gleich der Lorentz-Kraft: man
findet somit die übliche Bewegungsgleichung.
Bemerkungen:
∗ Die Wirkung (VIII.6) ist eichinvariant: unter einer Eichtransformation (VII.8) ändert sich die
Lagrange-Funktion (VIII.5) gemäß
∂χ t, ~x(t)
0
~
LM+F ~x(t), ~v (t) → LM+F ~x(t), ~v (t) = LM+F ~x(t), ~v (t) − q
+ ~v (t) · ∇ χ t, ~x(t)
∂t
dχ t, ~x(t)
.
= LM+F ~x(t), ~v (t) − q
dt
Da LM+F und L0M+F nur um eine totale Zeitableitung abweichen, unterscheiden sich die entsprechenden Wirkungen nur um eine Konstante, die keine Rolle für die Bewegungsgleichungen spielt.
Im Gegensatz ist die Lagrange-Funktion (VIII.5) deutlich nicht eichinvariant.
∗ Die Wechselwirkung mehrerer Punktladungen mit dem elektromagnetischen Feld lässt sich beschreiben durch die Wirkung
Z tb X h
i
~ t, ~xi (t) dt
SM+F = −
qi φ t, ~xi (t) − ~vi (t) · A
ta
i
Z tbZ
=−
ta
X
R3 i
Z
i
4
h
~ ~r) d3~r dt = − jµ (x)Aµ (x) d x ,
qi δ (3) ~r − ~xi (t) cA0 (t, ~r) − ~vi (t) · A(t,
c
(VIII.9)
mit j(x) dem mit den Ladungen assoziierten Viererstrom. Diese Wirkung ist sowohl Lorentz- als
eichinvariant.
Hamilton-Funktion
::::::::::::::::::
Die Hamilton-Funktion für eine Punktladung in einem äußeren elektromagnetischen Feld ist
2
~ · ~v − L(1) = p mc
H≡Π
+ qφ(t, ~r).
1 − ~v (t)2 /c2
VIII. Lagrange-Formulierung der Elektrodynamik
(VIII.10)
73
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
~ lautet der
Unter Verwendung des Vierervektors mit kontravarianten Komponenten Πµ ≡ (H/c, Π),
µ
µ
µ
kinetische Viererimpuls p = Π − qA (x). Quadriert man diese Identität, so kommt
2
~ − q A(t,
~ ~r) 2 ,
m2 c4 = c2 pµ pµ = H − qφ(t, ~r) − c2 Π
d.h.
~ =
H(~r, Π)
q ~ − q A(t,
~ ~r) 2 + m2 c4 + qφ(t, ~r).
c2 Π
Damit liefern die Hamilton-Gleichungen
∂H
∂H
= ẋi ,
= −Π̇i die üblichen Bewegungsgleichungen.
∂Πi
∂xi
VIII.3 Elektromagnetisches Feld mit Quellen
In diesem Abschnitt werden Elemente der klassischen Feldtheorie eingeführt (Lagrange-Dichte,
mit den zugehörigen Euler–Lagrange-Gleichungen, Noether-Theorem. . . ) und angewandt auf das
Beispiel des elektromagnetischen Felds.
VIII.3.1 Klassische Feldtheorie. Hamilton’sches Prinzip
Es seien ϕk (x), k = 1, . . . , N die Komponenten in einem gegebenen Bezugssystem von einem
Feld auf dem Minkowski-Raum.30
Diesem Feld wird eine Funktional
der Komponenten
ϕk (x) und deren Ableitungen ∂µ ϕk (x) zu
geordnet, die Lagrange-Dichte L ϕk (x), ∂µ ϕk (x) . Die entsprechende Lagrange-Funktion ist durch
Z
L = L ϕk (x), ∂µ ϕk (x) d3~r,
(VIII.11a)
gegeben, wobei die Integration auf den ganzen dreidimensionalen Raum durchgeführt wird. Die
resultierende Wirkung ist
Z
Z tb
d4 x
L dt = L ϕk (x), ∂µ ϕk (x)
S=
.
(VIII.11b)
c
ta
Bemerkungen:
∗ Ist die Lagrange-Dichte ein Lorentz-Skalar, so ist die Wirkung automatisch Lorentz-invariant.
∗ Zwei Lagrange-Dichten, die nur um eine 4-Divergenz ∂µ Λµ (x) abweichen, entsprechen Wirkungen,
die dieselben Bewegungsgleichungen liefern. Solche Lagrange-Dichten sind somit äquivalent.
Die Variation der Wirkung für eine Variation δϕk des Feldes ist
4
Z ∂L
∂L
d x
δS =
δϕk +
δ∂µ ϕk
,
∂ϕk
∂(∂µ ϕk )
c
worin über doppelt auftretende Indizes k und µ summiert wird.
Da δ∂µ ϕk = ∂µ δϕk , kann der zweite Term im Integranden durch partielle Integration berechnet
werden. Der resultierende Oberflächenterm kann weggelassen werden31 und es folgt
Z ∂L
d4 x
∂L
δS =
− ∂µ
δϕk
.
∂ϕk
∂(∂µ ϕk )
c
Die Wirkung ist stationär (Hamilton’sches Prinzip) wenn δS = 0 für beliebige Variationen δϕk ,
d.h. wenn das Feld und dessen Ableitungen genügen den Euler–Lagrange-Gleichungen
∂L
∂L
∂µ
=
(VIII.12)
.
∂(∂µ ϕk )
∂ϕk
30
31
Tatsächlich kann man ein Feld auf einem beliebigen Zeitraum betrachten.
An den „Endpunkten“, entsprechend dem Oberflächenterm, werden die Felder nicht variiert.
VIII. Lagrange-Formulierung der Elektrodynamik
74
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
VIII.3.2 Standard Lagrange-Dichte des freien elektromagnetischen Felds
Laut Gl. (VIII.9) und (VIII.11b) lässt sich die Lagrange-Funktion für den Wechselwirkungsterm
zwischen dem elektromagnetischen Feld und einem Strom als das Integral der Lagrange-Dichte
LM+F = −j µ (x)Aµ (x)
(VIII.13)
umschreiben.
In dieser Lagrange-Dichte tritt das elektromagnetische Feld in der Form des Viererpotentials
eher als des Feldstärketensors auf: die relevanten Freiheitsgrade sind also die Komponenten Aµ (x).
Die „Standard“-Lagrange-Dichte für das freie elektromagnetische Feld ist
i
1
0 h ~
~ ~r)2 ,
LF [Aµ , ∂ν Aµ ] = −
Fµν (x)F µν (x) =
E(t, ~r)2 − c2 B(t,
(VIII.14)
4µ0
2
mit Fµν (x) den kovarianten Komponenten des Feldstärketensors.
Ein dynamisches elektromagnetisches Feld in Anwesenheit von festen Quellen ist dann beschrieben durch die Lagrange-Dichte L (2) [Aµ , ∂ν Aµ ] = LF [Aµ , ∂ν Aµ ] + LM+F [Aµ , ∂ν Aµ ].
Die entsprechenden Euler–Lagrange-Gleichungen folgen dann aus
∂LM+F
= −j ν (x),
∂Aν
∂LM+F
= 0,
∂(∂µ Aν )
∂LF
=0
∂Aν
und
∂LF
1
∂
1
∂
1
=−
Fµν (x)F µν (x) = −
∂µ Aν (x)F µν (x) = − F µν (x),
∂(∂µ Aν )
4µ0 ∂(∂µ Aν )
2µ0 ∂(∂µ Aν )
µ0
und lauten
1
∂µ F µν (x),
µ0
d.h. sie liefern die inhomogenen Maxwell-Gleichungen.32
j ν (x) =
Bemerkungen:
∗ Da die Lagrange-Dichte (VIII.14) des freien elektromagnetischen Felds nur vom Feldstärketensor
abhängt, ist sie eichinvariant.
Im Gegensatz ist die Lagrange-Dichte (VIII.13) für den Wechselwirkungsterm zwischen Feld und
Punktladung nicht eichinvariant. Wie oben schon bermerkt wurde ist die entsprechende Wirkung
aber eichinvariant.
∗ In der obigen Herleitung der Bewegungsgleichungen wurde angenommen, dass die Komponenten
Aν (x), ν = 0,1,2,3 unabhängig voneinander sind. Wegen der Eichinvarianz der Elektrodynamik ist
dies aber nicht der Fall: das elektromagnetische Feld im Vakuum besitzt nicht vier Freiheitsgrade,
sondern nur zwei — entsprechend der zwei möglichen linearen Polarisationen. Die Eichinvarianz der
Theorie kann später durchgesetzt werden, wie sich am folgenden Beispiel des Energieimpulstensors
beobachten lässt.
∗ Wie immer kann man andere Lagrange-Dichten für das freie elektromagnetische Feld postulieren,
die zu den gleichen Bewegungsgleichungen führen. Daher wird die Wahl (VIII.14) oft als Standard
bezeichnet.
VIII.3.3 Energieimpulstensor
Aus der Invarianz der Elektrodynamik unter einer beliebigen Translation xµ → x0µ = xµ + aµ
in der Raumzeit folgt die Existenz einer Erhaltungsgröße, des Energieimpulstensors.
32
Mit Fµν (x) = ∂µ Aν (x) − ∂ν Aµ (x) [Gl. (VII.24)] sind die homogenen Maxwell-Gleichungen automatisch erfüllt.
VIII. Lagrange-Formulierung der Elektrodynamik
75
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
VIII.3.3
a Noether-Theorem
::::::::::::::::::::::::::::
Sei wieder die allgemeine Lagrange-Dichte L ϕk (x), ∂µ ϕk (x) des Abschnitts VIII.3.1.
Es wird angenommen, dass die resultierende Wirkung
Z
d4 x
S = L ϕk (x), ∂µ ϕk (x)
(VIII.15)
c
Ω
invariant ist unter den gleichzeitigen infinitesimalen Transformationen
xµ → x0µ = xµ + δxµ ,
ϕk (x) → ϕ0k (x) = ϕk (x) + δ̃ϕk (x).
(VIII.16a)
(VIII.16b)
Unter diesen Transformationen ändert sich das Integrationsvolumen in Gl. (VIII.15) gemäß Ω → Ω0 .
Dann lautet die transformierte Wirkung (VIII.15)
Z
Z
I
0 0
0
4 0
d4 x
d3 σµ
0
0 d x
0
0
L ϕk (x ), ∂µ ϕk (x )
L ϕ0k (x), ∂µ ϕ0k (x) δxµ
S =
= L ϕk (x), ∂µ ϕk (x)
+
,
c
c
c
Ω0
Ω
∂Ω
mit ∂Ω der Hyperfläche des Integrationsvolumens Ω und d3 σµ einem Hyperflächenelement.
Die Taylor-Entwicklung zur ersten Ordnung der rechten Seite dieser Gleichung liefert die Variation der Wirkung
4
Z I
d3 σµ
∂L
∂L
d x
0
δ̃ϕk +
L δxµ
+
S −S =
∂µ δ̃ϕk
∂(∂µ ϕk )
c
c
Ω ∂ϕk
∂Ω
3
Z I 4
d σµ
∂L
∂L
d x
∂L
− ∂µ
δ̃ϕk
δ̃ϕk + L δxµ
=
+
,
∂ϕ
∂(∂
ϕ
)
c
∂(∂
ϕ
)
c
µ k
µ k
k
Ω
∂Ω
wobei der Übergang von der ersten zur zweiten Zeile einer partiellen Integration entspricht. In allen
Termen ist das nicht-geschriebene Argument der Lagrange-Dichte [ϕk (x), ∂µ ϕk (x)].
Das Volumenintegral verschwindet dank den Euler–Lagrange-Gleichungen (VIII.12). Somit ist
die Wirkung nur dann invariant unter der Transformation (VIII.16), wenn das Oberflächenintegral
ebenfalls verschwindet. Im Letzteren kann δ̃ϕk (x) durch die Variation des Feldes
δϕk ≡ ϕ0k (x0 ) − ϕk (x) ' δ̃ϕk (x) + δxµ ∂µ ϕk (x)
(VIII.17)
ausgedrückt werden. Dann gilt
3
I d σµ
∂L
δϕk − δxν ∂ ν ϕk + L δxµ
=
∂(∂
ϕ
)
c
µ k
∂Ω
3
I d σµ
∂L
∂L
ν
µν
δϕk −
∂ ϕk − η L δxν
= 0.
∂(∂µ ϕk )
c
∂Ω ∂(∂µ ϕk )
Man definiert den (kanonischen) Energieimpulstensor durch dessen Komponenten
∂L
∂ ν ϕk − η µν L
∂(∂µ ϕk )
(VIII.18a)
∂L
µν
δϕk − Tkan.
δxν .
∂(∂µ ϕk )
(VIII.18b)
µν
Tkan.
=
sowie den Noether-Strom
Nµ =
Dann liefert der Satz von Stokes
I
N (x) d σµ =
µ
3
Z
∂Ω
∂µ Nµ (x) d4 x = 0.
(VIII.18c)
Ω
Sei Ω das Volumen zwischen den Hyperflächen t1 = Konstante und t2 = Konstante, entsprechend dem zeitartigen Hyperflächenelement
d3 σµ = (d3~r, ~0). Wenn die Felder ϕk im räumlichen
R 0
Unendlichen verschwinden, dann ist N (x) d3~r eine Konstante der Bewegung.
VIII. Lagrange-Formulierung der Elektrodynamik
76
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Dies gilt insbesondere für jede der vier Größen
Z
0ν
ν
(x) d3~r
P ≡ Tkan.
t
mit ν = 0, 1, 2, 3, die sich aus dem Einsetzen von δϕk = 0 und δxν = aν — d.h. für Translationen
der Raumzeit — in den Ausdruck des Noether-Stroms ergeben.
Die Erhaltung der P ν stellt einen Sonderfall des Noether-Theorems dar, laut dem zu jeder kontinuierlichen Gruppe von Transformationen der Felder und Koordinaten, die die Wirkung invariant
lassen, eine Erhaltungsgröße zugeordnet werden kann.
Bemerkungen:
∗ Die Invarianz der Wirkung unter Translationen der Raumzeit ist nur Teil der nötigen Invarianz
relativistischer Theorien unter Elemente der Poincaré-Gruppe. Aus der Invarianz unter Lorentzµνρ
µρ
−
Transformationen der Koordinaten folgt die Erhaltung des Tensors 3. Stufe M
= xν Tkan.
µν
µν
ρ
x Tkan. , mit Tkan. dem kanonischen Energieimpulstensor.
∗ In manchen Büchern wird statt der Invarianz der Wirkung unter den Transformationen (VIII.16)
die strengere Invarianz der Lagrange-Dichte erfordert. Diese Bedingung ist aber zu beschränkend
und gilt für die Lagrange-Dichte einer Punktladung in einem elektromagnetischen Feld nicht! Für
eine Diskussion s. Lévy-Leblond [12].
∗ In Analogie zur Mechanik einer endlichen Zahl von Freiheitsgraden kann man dem Feld ϕk mit
der Lagrange-Dichte L einen kanonisch konjugierten Impuls πk ≡ (1/c) ∂L /∂(∂0 ϕk ) assoziieren.
Damit ergibt sich die Hamilton-Dichte H[πk , ϕk ] = c πk ∂0 ϕk − L , dessen Integral über den Raum
die Hamilton-Funktion liefert. Aus Gl. (VIII.18a) folgt die Gleichheit der Hamilton-Dichte mit der
00 .
00-Komponente des kanonischen Energieimpulstensors, H = Tkan.
VIII.3.3
b Elektromagnetischer Energieimpulstensor
:::::::::::::::::::::::::::::::::::::::::::::::::::
Aus Gl. (VIII.18a) und der Standard Lagrange-Dichte (VIII.14) des freien elektromagnetischen
Felds ergibt sich der kanonische Energieimpulstensor
∂LF
1
µν
Tkan.
=
∂ ν Aρ − η µν LF = − F µρ ∂ ν Aρ − η µν LF .
(VIII.19)
∂(∂µ Aρ )
µ0
Dieser Tensor ist aber nicht eichinvariant! Ersetzt man Aµ durch A0µ = Aµ + ∂ µ χ, so transformiert
µν
0µν
µν
sich Tkan.
in Tkan.
= Tkan.
− (1/µ0 )F µρ ∂ ν ∂ρ χ.
Allgemein existieren neben dem kanonischen Tensor (VIII.18a) weitere Energieimpulstensoren,
die ebenfalls erhalten sind, und zwar der Art
µν
+ ∂σ K µσ,ν ,
T µν = Tkan.
wobei K µσ,ν antisymmetrisch in µ und σ ist: K µσ,ν = −K σµ,ν . Man überprüft einfach
µν
∂µ T µν = ∂µ Tkan.
+ ∂µ ∂σ K µσ,ν = 0.
Für das elektromagnetische Feld liefert die Wahl K µσ,ν = (1/µ0 )F µσ Aν einen eichinvarianten
Energieimpulstensor
1 µρ ν
1
T µν = −
F ∂ Aρ − ∂ρ F µρ Aν − η µν LF = −
F µρ ∂ ν Aρ − F µρ ∂ρ Aν − η µν LF ,
µ0
µ0
µρ
wobei die Maxwell-Gleichung ∂ρ F = 0 benutzt wurde. Mit dem Ausdruck (VIII.14) der LagrangeDichte lässt sich dieser Tensor umschreiben als
1
1 µν
µν
µρ ν
ρσ
T =−
F F ρ − η Fρσ F
(VIII.20)
.
µ0
4
Somit findet man Gl. (VII.30) wieder.
VIII. Lagrange-Formulierung der Elektrodynamik
77
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Literatur
• Jackson [7], Kapitel 12.1, 12.7, 12.10
• Landau–Lifschitz [8], Kapitel 4 § 27–33
• Scheck [13], Kapitel 3
• Schwinger [14], Kapitel 8 & 9.
VIII. Lagrange-Formulierung der Elektrodynamik
78
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
IX. Klassische Theorie der Strahlung
In diesem Kapitel werden die Maxwell-Gleichungen in Anwesenheit fester äußerer Quellen mithilfe
von retardierten Potentialen gelöst. Dafür wird zunächst die retardierte Green’sche Funktion des
elektromagnetischen Felds eingeführt. Dann wird das durch ein bewegtes geladenes Punktteilchen
erzeugte elektromagnetische Feld bestimmt. Schließlich wird die durch eine beschleunigte Punktladung abgestrahlte Leistung hergeleitet.
IX.1 Green’sche Funktion der vierdimensionalen Poisson-Gleichung
Die Bewegungsgleichung (VII.28) für das Viererpotential in der Lorenz-Eichung ist eine lineare
partielle Differentialgleichung
1 µ
Aµ (x) =
j (x) ∀µ,
(IX.1)
0 c2
d.h. eine inhomogene vierdimensionale Poisson-Gleichung.
Die Lösung ist gleich der Summe der allgemeinen Lösung der assoziierten homogenen Differentialgleichung — entsprechend bekannterweise ebenen Wellen — und einer speziellen Lösung. Hiernach
wird eine solche spezielle Lösung berechnet.
Sei G(x) eine Green’sche Funktion der Gleichung (IX.1), d.h. G genügt der Differentialgleichung
G(x) = δ (4) (x)
(IX.2a)
mit δ (4) (x) der Delta-Distribution im Minkowski-Raum. Dann ist die Faltung von G und j µ /(0 c2 )
eine Lösung von Gl. (IX.1):
Z
1
µ
d4 x0 G(x − x0 ) j µ (x0 ).
(IX.2b)
A (x) =
0 c2
Wenn x den d’Alembert-Operator bezüglich x bezeichnet, gilt tatsächlich
Z
Z
1
1
0
µ 0
4 0
x G(x − x0 ) j µ (x0 )
x Aµ (x) =
G(x
−
x
)
j
(x
)
d
x
=
x
0 c2
0 c2
Z
1
1 µ
=
δ (4) (x − x0 ) j µ (x0 ) d4 x0 =
j (x).
2
0 c
0 c2
Um eine Lösung der Gleichung (IX.2a) zu finden, ist es günstig, die Fourier-Darstellungen
Z
4
µ d k
(4)
δ (x) = e−ikµ x
(2π)4
Z
d4 k
µ
bzw.
G(x) = e−ikµ x G̃(k)
(2π)4
der δ (4) -Distribution bzw. der gesuchten Green’schen Funktion einzuführen. Somit gilt
Z
Z
d4 k
d4 k
ν −ikµ xµ
−ikµ xµ
ν
G(x) =
∂ν ∂ e
=
e
,
G̃(k)
(−k
k
)
G̃(k)
ν
(2π)4
(2π)4
woraus
G̃(k) = −
1
1
=
ν
~k 2 − k 2
kν k
0
folgt, sowie
Z −ikµ xµ 4
Z −i(k0 x0 −~k·~r)
e
d k
1
e
G(x) = −
=
dk0 d3~k.
ν
4
4
~k 2 − k 2
kν k (2π)
(2π)
0
Dieser Ausdruck ist mehrdeutig, weil der Nenner verschwindet.
IX. Klassische Theorie der Strahlung
79
N.BORGHINI
Elektrodynamik einer Punktladung
Z
Theoretische Physik IV
~
eik·~r
d3~k. Die Berechnung gibt
~k 2 − k 2
0
Z ∞ Z 1 ikr cos θ
Z
e
2π ∞ k
2
k
g(k0 , ~r) = 2π
d(cos
θ)
dk
=
eikr − e−ikr dk
2
2
2
2
ir 0 k − k0
0
−1 k − k0
Z ∞
Z ∞
Z
ikr
−ikr
ke
ke
2π ∞ k eikr
2π
dk
−
dk
=
dk,
=
2
2
2
2
ir
ir −∞ k 2 − k02
0 k − k0
0 k − k0
Sei g(k0 , ~r) ≡
mit r = |~r| und θ dem Winkel zwischen ~k und ~r.
Die Funktion g(k0 , ~r) ist wohldefiniert für k0 ∈ C mit Im k0 6= 0. Wenn Γ(Λ) die in Abb. IX.1
Im k
6
Γ(Λ)
I
k• 0
-
−Λ •
−k0
-
-
Λ Re k
Z ∞
k eikr
Abbildung IX.1: Integrationskontour für
2 dk mit r > 0.
2
−∞ k − k0
dargestellte Integrationskontour bezeichnet, dann ist für r > 0
Z ∞
Z
k eikr
k eikr
dk
=
lim
dk
2
2
Λ→∞ Γ(Λ) k 2 − k02
−∞ k − k0
gleich 2πi multipliziert mit dem Residuum von k eikr /(k 2 − k02 ) am Pol in der Halbebene Im k > 0.
Für Im k0 > 0 liegt der Pol in der oberen Halbebene bei k = k0 und das Residuum ist eik0 r /2. Für
Im k0 < 0 liegt der Pol in der unteren Halbebene bei k = −k0 , mit dem Residuum e−ik0 r /2. Somit
gilt
2π 2 ik0 r
e
wenn Im k0 > 0,
r
g(k0 , ~r) =
2π 2 −ik0 r
e
wenn Im k0 < 0.
r
2π 2 ±ik0 r
Für k0 ∈ R sei g± (k0 , ~r) ≡ lim g(k0 ± i, ~r) =
e
definiert. Daraus folgen zwei Green’schen
r
→0+
Funktionen
Z ∞
Z ∞
1
1
1
0
−ik0 x0
G± (x) =
e
g± (k0 , ~r) dk0 = 2
eik0 (−x ±r) dk0 =
δ(−x0 ± r),
4
(2π) −∞
8π r −∞
4πr
d.h.
G± (x) =
1
δ(r ∓ ct).
4πr
(IX.3)
• G+ (x) ist die retardierte Green’sche Funktion: wenn die Quelle bei x = 0 ist, dann ist der
Träger von G+ auf dem Vorwärtslichtkegel r = ct mit t ≥ 0 der Quelle lokalisiert.
• G− (x) ist die avancierte Green’sche Funktion: G− ist lokalisiert auf dem Rückwärtslichtkegel
r = −ct mit t ≤ 0 der Quelle bei x = 0.
Bemerkung: Da die Gleichung (IX.2a) dieselbe Form in allen Bezugssystemen annimmt, ist zu
erwarten, dass die Green’schen Funktionen skalar bezüglich orthochroner Lorentz-Transformationen
sind. Tatsächlich gilt
1
Θ(±x0 ) δ(xµ xµ ),
G± (x) =
2π
IX. Klassische Theorie der Strahlung
80
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
wobei die einzige Rolle der Heaviside-Funktion Θ darin besteht, den Rückwärts- bzw. Vorwärtslichtkegel auszuwählen.
Aus δ(f (r)) =
X δ(r − ri )
i
|f 0 (ri )|
, wobei auf die Nullstellen ri der Funktion f summiert wird, folgt
1
δ(r − ct) δ(r + ct)
1
1
0
2
2 2
Θ(±x ) δ(~r − c t ) =
Θ(±ct)
+
=
δ(r ∓ ct),
2π
2π
|2ct|
|2ct|
4πr
wobei r ≥ 0 benutzt wurde.
IX.2 Retardierte Potentiale
Man sucht bei gegebenem Viererstrom j(x) eine Lösung Aµ (x) der Gleichung (IX.1) mit der
Eichung-Bedingung ∂µ Aµ (x) = 0.
Das Einsetzen der retardierten Green’schen Funktion in Gl. (IX.2b) gibt
Z
1
µ
G+ (x − x0 ) j µ (x0 ) d4 x0 .
(IX.4)
Aret. (x) =
0 c2
Dieses Potential genügt automatisch der Lorenz-Eichung-Bedingung:
Z
Z
1
∂G+ (x − x0 ) µ 0 4 0
1
∂G+ (x − x0 ) µ 0 4 0
µ
∂µ Aret. (x) =
j
(x
)
d
x
=
−
j (x ) d x
0 c2
∂xµ
0 c2
∂x0µ
Z
µ 0
1
0 ∂j (x ) 4 0
=
G
(x
−
x
)
d x = 0,
+
0 c2
∂x0µ
wobei eine partielle Integration benutzt wurde, mit der Annahme, dass der Viererstrom im Unendlichen verschwindet, während die allerletzte Gleichung aus der Kontinuitätsgleichung folgt.
Mit dem Ausdruck (IX.3) der retardierten Green’schen Funktion gilt
Z
1
1
µ
Aret. (x) =
δ |~r − ~r 0 | − c(t − t0 ) j µ (x0 ) d4 x0
2
0
0 c
4π|~r − ~r |
Z
Z
1
1
0
0
µ 0
0
0
δ(ct − ct + |~r − ~r |) j (t , ~r ) d(ct ) d3~r 0 ,
=
4π0 c2 |~r − ~r 0 |
(IX.5)
d.h.
Aµret. (t, ~r) =
1
4π0 c2
Z
1
|~r − ~r 0 | 0 3 0
µ
j
t
−
,
~
r
d ~r .
|~r − ~r 0 |
c
(IX.6)
Aµret. heißt retardiertes Viererpotential : das Viererpotential am Ort ~r zur Zeit t hängt vom Viererstrom j µ am Ort ~r 0 zur früheren, retardierten Zeit t − |~r − ~r 0 |/c ab, wobei die Verzögerung der
Reisezeit des Lichts von ~r 0 bis zu ~r entspricht.
Bemerkung: Man kann auch mithilfe der avancierten Green’schen Funktion G− ein avanciertes
Potential bestimmen. Physikalisch werden solche Potentiale üblicherweise im Namen vom Prinzip
der Kausalität nicht angenommen: das Effekt — Potential am Punkt (t, ~r) — könne nicht vor der
Ursache — Quelle am Punkt (t + |~r −~r 0 |/c, ~r 0 ) — kommen. Diese Wahl der Lösung mit retardiertem
Potential schließt also einen Unterschied zwischen Vergangenheit und Zukunft („elektromagnetischer
Zeitpfeil“) ein, der in den Maxwell-Gleichungen nicht existiert.
Referenz [15] legt eine „Begründung“ dieser Wahl dar, die aber nicht zwangsläufig ist: beispielsweise haben Wheeler und Feynman [16] lineare Kombinationen von retardierten und avancierten
Potentialen benutzt, um Probleme der klassischen Elektrodynamik von Punktladungen — insbesondere deren Selbstwechselwirkung — zu lösen.
IX. Klassische Theorie der Strahlung
81
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Stationärer Strom
Für einen stationären Viererstrom gibt Gl. (IX.6)
Z
1
ρ(~r 0 ) 3 0
φ(~r) =
d ~r ,
4π0 |~r − ~r 0 |
Z
~(~r 0 ) 3 0
~ r ) = µ0
d ~r .
A(~
4π |~r − ~r 0 |
(IX.7a)
(IX.7b)
Das Potential (IX.7a) stellt die Lösung der Poisson-Gleichung 4φ(~r) = −ρ(~r)/0 der Elektrostatik
~ r) = −µ0~(~r) der
dar, während das Vektorpotential (IX.7b) Lösung der Poisson-Gleichung 4A(~
~
~
Magnetostatik ist. Das Letzere erfüllt die Coulomb-Eichung-Bedingung ∇ · A(~r) = 0.
IX.3 Potentiale und Felder einer bewegten Punktladung
Dieser Abschnitt beginnt mit der Berechnung der Potentiale und Felder, die durch eine bewegte
Punktladung mit der Bahnkurve
~x(t) erzeugt werden. Die zugehörige Raumzeitlinie der Ladung
µ
wird als x (t) = ct, ~x(t) bezeichnet, und der entsprechende Viererstrom ist [vgl. Gl. (VII.4)]
dxµ (t)
j µ (t, ~r) = qδ (3) ~r − ~x(t)
.
dt
Dann wird die durch die Felder transportierte Leistung bestimmt.
IX.3.1 Liénard–Wiechert-Potentiale
Mit dieser Form des Viererstroms lautet das Viererpotential (IX.5)
Z
µ 0
(3) 0
1
1
µ
0 dx (t )
0
0
~
r
−
~
x
(t
)
A (t, ~r) =
δ
c(t
−
t
)
−
|~
r
−
~
r
|
qδ
d(ct0 ) d3~r 0
4π0 c2 |~r − ~r 0 |
dt
Z ∞ µ 0
dx (t )
q
1
|~r − ~x(t0 )|
0
δ
t
−
t
−
dt0 .
=
4π0 c2 −∞ dt |~r − ~x(t0 )|
c
(IX.8)
Das Argument f (t0 ) = t − t0 − |~r − ~x(t0 )|/c der δ-Distribution verschwindet für einen einzigen
Wert von t0 , der als tret. bezeichnet wird und retardierte Zeit heißt. tret. ist die Zeit, zu der die
Raumzeitlinie xµ (t) der Punktladung den Rückwärtslichtkegel des Punkts (ct, ~r) durchschneidet
(Abb. IX.2).
x00
xµ (t)
6
•
(ct, ~r)
@
@
@
@
•
x02 @
@ x01
@
@
Abbildung IX.2: Retardierte Zeit.
Die retardierte Zeit genügt somit der impliziten Gleichung
|~r − ~x(tret. )|
.
c
δ(t0 − tret. )
Die Integration nach t0 in Gl. (IX.8) folgt aus δ f (t0 ) =
, wobei
|f 0 (tret. )|
tret. = t −
f 0 (t0 ) = −1 +
IX. Klassische Theorie der Strahlung
(IX.9)
1 ~r − ~x(t0 ) d~x(t0 )
·
.
c |~r − ~x(t0 )|
dt
82
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Hier gilt
f 0 (tret. ) = −1 + ~eret. · β~ret. ,
mit
~eret. ≡
~ ret.
~r − ~x(tret. )
X
≡
~ ret. |
|~r − ~x(tret. )|
|X
(IX.10a)
~ ret. ≡ ~r − ~x(tret. ), d.h. von der Quelle des Potentials bis zu
dem Einheitsvektor in Richtung von X
dessen Beobachtungspunkt, während
~vret.
1 d~x(tret. )
β~ret. =
=
(IX.10b)
c
c
dt
die Geschwindigkeit der Punktladung zur retardierten Zeit bezeichnet. Da der Betrag von β~ret.
streng kleiner als 1 ist, bleibt f 0 (tret. ) immer negativ.
Somit ergeben sich die Liénard–Wiechert-Potentiale
q
1 dxµ (tret. )
,
(IX.10c)
Aµ (t, ~r) =
2
~
4π0 c
dt
(1 − ~eret. · βret. )|~r − ~x(tret. )|
d.h.
q
1
φ(t, ~r) =
(IX.10d)
~vret.
4π0
|~r − ~x(tret. )| − [~r − ~x(tret. )] ·
c
q~
v
µ
ret.
0
~ ~r) =
(IX.10e)
A(t,
~vret.
4π
|~r − ~x(tret. )| − [~r − ~x(tret. )] ·
c
Dabei hängt die Geschwindigkeit ~vret. der Punktladung zur retardierten Zeit von tret. und somit
implizit von t und ~r ab.
Bemerkungen:
∗ Der Nenner dieser Potentiale ist immer positiv.
∗ Man kann eine kovariante Form des Viererpotentials (IX.10c) finden, die von der Vierergeschwin
digkeit uµret. im retardierten Punkt xµret. und von X µ ≡ xµ − xµret. = c(t − tret. ), ~r − ~x(tret. ) abhängt.
Im mitbewegten Bezugssystem, das sich mit der Punktladung zur retardierten Zeit bewegt, lautet
Gl. (IX.10c)
q
1
A0 (t, ~r) =
,
Ai (t, ~r) = 0 für i = 1, 2, 3,
4π0 c |~r − ~x(tret. )|
während Xν uνret. = c2 (t − tret. ) = c|~r − ~x(tret. )| gilt. Dann gilt der deutlich kovariante Ausdruck
uµret.
q
Aµ (x) =
.
4π0 c Xν uνret.
∗ Wenn die Punktladung beschleunigt wird, muss sie einer Kraft unterliegen, d.h. sie muss in einem
elektromagnetischen Feld sein: dieses „äußere“ Feld wird hier nicht präzisiert.
IX.3.2 Elektrisches und magnetisches Feld
Das elektrische und das magnetische Feld können aus Gl. (VII.6) hergeleitet werden. Die Liénart–
Wiechert-Potentiale (IX.10) hängen aber nicht nur explizit von der Raumzeitvariablen t und ~r ab,
sondern auch implizit über die retardierte Zeit (IX.9). Dementsprechend ist die Berechnung der
Felder etwa mühsam, und führt letztendlich zu den retardierten Feldern:
!
~ret. × ~aret.
~ret.
~
e
×
~
e
−
β
q
~
e
−
β
ret.
ret.
ret.
~ =
,
(IX.11a)
E
+
2 X
~ ret. ~ ret. 2
c2 X
4π0 (1 − ~eret. · β~ret. )3 γret.
~
~ = 1 ~eret. × E,
B
(IX.11b)
c
IX. Klassische Theorie der Strahlung
83
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
mit β~ret. bzw. ~aret. der auf c normierten Geschwindigkeit bzw. der Beschleunigung der Punktladung
2 )−1/2 dem entsprechenden Lorentz-Faktor.
zur retardierten Zeit und γret. = (1 − β~ret.
Beweis: Um die retardierten Felder herzuleiten, lohnt es sich, die Potentiale (IX.10d)–(IX.10e)
zu umschreiben [vgl. Gl. (IX.8)]
Z ∞
1
q
|~r − ~x(t0 )|
0
φ(t, ~r) =
δ t−t −
dt0
(IX.12a)
4π0 −∞ |~r − ~x(t0 )|
c
Z ∞
~v (t0 )
|~r − ~x(t0 )|
0
~ ~r) = µ0 q
δ
t
−
t
−
dt0
(IX.12b)
A(t,
4π −∞ |~r − ~x(t0 )|
c
~ 0 ) ≡ ~r − ~x(t0 ) sowie der entsprechende Einheitsvektor ~e(t0 ) ≡ X(t
~ 0 )/|X(t
~ 0 )|. Aus
Es sei dann X(t
diesen Gleichungen folgen
#
Z ∞"
~ 0 ) ~ 0 ) X(t
X(t
1
q
1
0
0
0
~
−
~e(t0 ) dt0 ,
∇φ(t,
~r) =
− δ t−t −
δ t−t −
~ 0 )
4π0 −∞
c
c
~ 0 )2
X(t
cX(t
Z
~ 0 ) X(t
~
∂A
µ0 q ∞ ~v (t0 ) 0
0
(t, ~r) =
dt0 .
δ t−t −
~ 0 )
∂t
4π −∞ X(t
c
~ 0 )/c gibt ds = −1 + ~e · β~ und dadurch
Die Substitution s = f (t0 ) = t − t0 − X(t
dt0
#
"
Z ∞
~
q
~
e
~
e
−
β
1
0
~ ~r) =
E(t,
(IX.13)
2 δ(s) + δ (s) ds,
~ X
~
4π0 −∞ 1 − ~e · β
~
cX
~ ~v und β~ ≡ ~v /c zur Zeit t0 = f −1 (s) zu betrachten sind. Der Term mit der Ableitung
wobei ~e, X,
der δ-Distribution kann mithilfe partieller Integration berechnet werden:
#
"
Z ∞
Z ∞
~
d
~
e
−
β
~e − β~
δ(s)
δ 0 (s) ds = −
ds
~
~
ds c 1 − ~e · β~ X
e · β~ X
−∞
−∞ c 1 − ~
"
#
Z ∞
1
~e − β~
d
δ(s)
=
ds.
~ X
~
1 − ~e · β~ dt0 c 1 − ~e · β
−∞
Die Ableitung nach t0 im Integranden folgt aus den Ableitungen
d 1
~e · ~v
= 2 ,
0
~
dt X
~
X
d~e
(~e · ~v )~e − ~v
=
,
0
~
X
dt
~e · ~a (~e · ~v )2 − ~v 2
d
1
1
=
+
,
2
~
dt0 1 − ~e · β~
c
c X
1 − ~e · β~
mit ~a = d~v /dt0 der Beschleunigung der Punktladung. Dies führt zu
"
#
"
~e · ~a ~e − ~a − ~e · ~a β~ + ~e · β~ ~a
~e − β~
1
d
= ~
dt0 c 1 − ~e · β~ X
c2
~ 1 − ~e · β~ 2
X
#
2
~2
2 ~e · β~ − ~e · β~ − β~ 2
1−β
+
~e − β~ ,
~
~
X
X
so dass Gl. (IX.13) insgesamt lautet
Z ∞
δ(s)
~ ~r) = q
E(t,
4π0 −∞ X
~ 1 − ~e · β~ 3
!
~ − ~e · ~e − β~ ~a
~e · ~a ~e − β
1 − β~ 2 ~e − β~
+
ds.
~
X
c2
Dann ist der Integrand gleich dem Produkt eines Terms δ(s) mit einer Funktion von s: das Integral ist einfach der Wert der Letzteren für s = 0, d.h. t0 = tret. . Somit findet man Gl. (IX.11a).
~ ~r) lässt sich ähnlich berechnen, ausgehend aus
Das magnetische Feld B(t,
"
#
Z ∞
~ 0 ) ~ 0 ) X(t
X(t
µ
q
−1
1
0
0
0
0
0
0
~ A(t,
~ ~r) =
∇×
~e(t )×~v (t ) − dt0 .
δ t−t −
δ t−t −
0
~
4π −∞
c
c
~ 0 )2
X(t
c X(t )
IX. Klassische Theorie der Strahlung
84
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Die retardierten elektromagnetischen Felder (IX.11) bestehen aus einem Beitrag proportional
~ ret. |2 und einem Term proportional zu 1/|X
~ ret. |. In einem Bezugssystem, das sich mit der
zu 1/|X
~ret. = ~0, lautet Gl. (IX.11)
Punktladung zur retardierten Zeit mitbewegt, d.h. wo β
"
#
~
e
×
~
e
×
~
a
q
~
e
ret.
ret.
ret.
ret.
~ =
~ = 1 ~eret. × E.
~
E
,
B
2 +
2
~
~
4π0 Xret.
c
c Xret.
~ ret. |2 einer ruhenden Punktladung
Das elektrische Feld ist die Summe des Coulomb-Felds in 1/|X
~ Coul. = q ~eret. ,
~ Coul. = ~0,
E
B
~ ret. 2
4π0 X
und, wenn die retardierte Beschleunigung ~aret. der Punktladung nicht null ist, des Strahlungsfeldes
~ ret. |
in 1/|X
q
~ Strahl. =
~ Strahl. = 1 ~eret. × E
~ Strahl. .
E
B
~eret. × ~eret. × ~aret. ,
2
~
c
4π0 c Xret.
Diese Strahlungsfelder sind senkrecht zu ~eret. .
~ ret. |2 in Gl. (IX.11) dem Coulomb-Feld, und der
Ähnlicherweise entspricht der Beitrag in 1/|X
~ ret. |, dem Strahlungsfeld.
Term in 1/|X
Punktladung
in gleichförmiger Bewegung
:::::::::::::::::::::::::::::::::::::::
Wenn ~aret. = ~0 zu jeder retardierten Zeit vereinfacht sich das elektrische Feld (IX.11) zu
~ ret. ~
~ ret. − X
X
β
q
q
~eret. − β~
~
E=
2 =
,
3 ~ ret. − X
~ ret. · β~ 3
~ ret. 4π0 γ 2 X
4π0 1 − ~eret. · β~ γ 2 X
(IX.14)
~
mit konstanter Geschwindigkeit β.
~
Aus |Xret. | = |~r − ~x(tret. )| = c(t − tret. ) folgt für die gleichförmige Bewegung der Punktladung
~ − tret. ) = ~x(tret. ) + |X
~
~ ret. |β,
~x(t) = ~x(tret. ) + cβ(t
~ ret. − |X
~ ret. |β~ = ~r − ~x(t): das elektrische Feld zur
d.h. für den Vektor im Zähler der Gl. (IX.14) X
Zeit t ist in der momentanen Richtung von der Ladung nach ~r, nicht in der „retardierten“ Richtung
gerichtet.
IX.3.3 Abgestrahlte Leistung
Sei ein Flächenelement d2 S in einem Punkt ~r im Abstand X einer Punktladung, von der aus
d2 S unter einem Raumwinkelelement d2 Ω gesehen wird, und ~eret. der Einheitsvektor in Richtung
von der Punktladung nach ~r. Die Energie, die pro Einheit der Eigenzeit t des Punkts ~r durch d2 S
strömt, ist die empfangene Leistung
~ · ~eret. X 2 d2 Ω,
d2P = S
~=E
~ × B/µ
~ 0 dem Poynting-Vektor in ~r [Gl. (VII.11b)], entsprechend der Energiestromdichte
mit S
~ und B
~ den retardierten Feldern (IX.11). Für große Abstände X → ∞
in diesem Punkt, und E
trägt der Coulomb-Teil der retardierten Felder nicht bei, und man darf das Strahlungsfeld alleine
betrachten.
Dann gilt
h
i
d2P
1
2 ~
~
=
X
E
×
~
e
×
E
· ~eret. .
ret.
Strahl.
Strahl.
d2 Ω
µ0 c
~2
~ Strahl. )E
~ Strahl. , wobei der zweite Term wegen
Das doppelte Kreuzprodukt gibt E
eret. − (~eret. · E
Strahl.~
~ Strahl. und ~eret. null ist. Damit ergibt sich
der Orthogonalität von E
2
µ0 q 2
d2P
~
=
6 ~eret. × ~eret. − βret. × ~aret. .
d2 Ω
(4π)2 c 1 − ~eret. · β~ret.
IX. Klassische Theorie der Strahlung
85
N.BORGHINI
Theoretische Physik IV
Elektrodynamik einer Punktladung
Die Leistung, die durch die Punktladung abgestrahlt wird, ist die Energie, die durch d2 S pro
Einheit der Eigenzeit der Punktladung strömt. Diese Eigenzeit ist gerade die retardierte Zeit tret. ,
so dass die abgestrahlte Leistung durch
2
d2P0
µ0 q 2
d2P ∂t
~
=
~
e
×
~
e
−
β
×
~
a
(IX.15)
=
ret.
ret.
ret.
ret. 5
d2 Ω
d2 Ω ∂tret.
(4π)2 c 1 − ~eret. · β~ret.
gegeben wird, wobei
∂t
= 1 − ~eret. · β~ret. benutzt wurde.
∂tret.
Um die letztere partielle Ableitung zu erhalten, kann man Gl. (IX.9) differenzieren, was zu
dtret. − dt +
~ ret. · dX
~ ret.
1X
1
= dtret. − dt + ~eret. · (d~r − ~vret. dtret. ) = 0
~
c
c
Xret.
1
führt, d.h. 1 − ~eret. · β~ret. dtret. = dt − eret.
~ · d~r. Dann gelten
c
∂tret.
1
=
,
∂t
1 − ~eret. · β~ret.
~ ret. = −
∇t
~eret.
c 1 − ~eret. · β~ret.
.
Bemerkung: Eine nicht-beschleunigte Punktladung strahlt keine Energie ab!
IX.3.3
a Nicht-relativistischer Grenzfall
::::::::::::::::::::::::::::::::::::::
Wenn |β~ret. | |~eret. | = 1 vereinfacht sich Gl. (IX.15) zu
2
µ0 q 2 d2P0
.
=
~
e
×
~
e
×
~
a
ret.
ret.
ret.
d2 Ω
(4π)2 c
Bezeichnet θ den Winkel zwischen der retardierten Beschleunigung ~aret. und der Beobachtungsrichtung ~eret. , so gilt
d2P0
µ0 q 2
q 2 |~aret. |2 sin2 θ
2
2
=
|~
a
|
sin
θ
=
.
ret.
d2 Ω
(4π)2 c
4π0 c3 4π
Die Strahlungsleistung ist maximal senkrecht zur Richtung der Beschleunigung.
Die gesamte abgestrahlte Leistung ergibt sich durch Integration über den Raumwinkel: man
erhält die Larmor-Formel
Z 2
2 q 2 |~aret. |2
d P0 2
P0 =
d Ω=
.
(IX.16)
2
d Ω
3 4π0 c3
Diese abgestrahlte Leistung entspricht einem Strahlungsverlust, d.h. der Rate der Energie, die
durch Strahlung wegtransportiert wird.
IX.3.3
b Allgemeiner Fall
:::::::::::::::::::::::::
Die Larmor-Formel (IX.16) gilt in einem mitbewegten Bezugssystem B0 , wo die retardierte
Geschwindigkeit der Punktladung verschwindet. In einem Bezugssystem B~v , wo die retardierte
Geschwindigkeit der Punktladung den Wert ~v annimmt, gilt
P0 = −
2 q2
aµ aret.µ ,
3 4π0 c3 ret.
(IX.17)
mit aµ = duµ /dτ = d2 xµ /dτ 2 den kontravarianten Komponenten der Viererbeschleunigung der
Punktladung, die hier zur retardierten Zeit betrachtet werden soll.
Diese Formel lässt sich noch umschreiben als
h
2
2 i
2 q2
6
~
P0 =
γ
~
a
−
β
×
~
a
.
(IX.18)
ret.
ret.
ret.
3 4π0 c3 ret.
IX. Klassische Theorie der Strahlung
86
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Beweis der relativistischen Formeln (IX.17)–(IX.17):
Der erste Schritt besteht in der Beobachtung, dass die abgestrahlte Leistung Lorentz-invariant
ist. Es seien dE0 bzw. dE das Differential der Energie im Bezugssystem B0 bzw. B~v , und dt0
bzw. dtpdie entsprechenden Differentiale der Zeit. Dann gelten dE = γ dE0 und dt = γ dt0 , mit
γ = 1/ 1 − ~v 2 /c2 dem Lorentz-Faktor. Daraus folgt
dE
dE0
=
= P0 .
dt
dt0
Berechnet man dann das Lorentz-Skalar aµ aµ der Viererbeschleunigung, so kommt erstens
duµ
duµ
~ · ~a)β~
=γ
= γ 4 β~ · ~a, γ 2~a + γ 4 (β
aµ =
dτ
dt
mit ~a = d~v /dt der Beschleunigung der Punktladung, und daher
2 aµ aµ = −γ 4 ~a 2 + γ 2 β~ · ~a .
(IX.19)
Die Formeln (IX.16) und (IX.17) stimmen miteinander in einem Bezugssystem überein, und
zwar in B0 wo β~ = ~0 bzw. γ = 1. Somit gilt Gl. (IX.17) in allen Bezugssystemen.
Sei ϑ der Winkel zwischen β~ und ~a. Aus
2
~ 2 ~a 2 + β
~ · ~a 2 = 1 ~a 2 + β~ · ~a 2
~a 2 − β~ × ~a = ~a 2 − β~ 2~a 2 (1 − cos2 ϑ) = 1 − β
2
γ
und dem Viererquadrat (IX.19) folgt dann die Identität der rechten Gliedern der Gl. (IX.17)
und (IX.18).
IX.3.3
c Beschleunigung in die Richtung der Geschwindigkeit
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Wenn Beschleunigung und Geschwindigkeit parallel zueinander sind, gelten ~aret. × β~ret. = ~0 und
~eret. · β~ret. = |β~ret. | cos θ. Dann lautet Gl. (IX.15)
d2P0
µ0 q 2 |~aret. |2
sin2 θ
=
5 .
d2 Ω
(4π)2 c
1 − |β~ret. | cos θ
(IX.20)
d2P0
Für |β~ret. | → 1 wird also 2 groß in der Vorwärtsrichtung cos θ = 1.33
d Ω
Die Integration der Leistung (IX.20) über den Raumwinkel führt zu
2 q 2 |~aret. |2 6
γ ,
(IX.21)
3 4π0 c3
mit γ dem Lorentz-Faktor assoziiert mit der Geschwindigkeit der Punktladung. Dieses Resultat folgt
auch aus der relativistischen Formel (IX.18).
Die Leistung (IX.21) wird also unendlich groß, wenn die Geschwindigkeit der Punktladung gegen
c strebt. Dieses Resultat zeigt, dass es nicht möglich ist, eine Punktladung bis zur Lichtgeschwindigkeit zu beschleunigen: dies würde eine unendliche Energie erfordern, um die unendliche abgestrahlte
Leistung zu kompensieren.
Sei F~ (t) die Kraft, die für die Beschleunigung der Punktladung zur Zeit t verantwortlich ist:
d(γ~v )
~ · ~a(t) β(t)
~
F~ (t) = m
= γ(t) m ~a(t) + γ 2 (t) β(t)
.
(IX.22)
dt
P0 =
Für Linearbewegung, d.h. wenn Beschleunigung und Geschwindigkeit parallel zueinander sind, ist
F~ (t) = γ(t)3 m~a(t), so dass die Leistung (IX.21) sich als
2
q2
F~ (tret. )2
P0 =
3 4π0 m2 c3
schreiben lässt.
33
2
~ret. | sehr nah an 1 das Maximum von d P0 für θ ' 1 erreicht.
Genauer wird für |β
d2 Ω
2γ
IX. Klassische Theorie der Strahlung
87
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
IX.3.3
d Beschleunigung senkrecht zur Richtung der Geschwindigkeit
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Wenn Beschleunigung und Geschwindigkeit orthogonal sind, entsprechend einer Kreisbewegung,
lautet die abgestrahlte Leistung (IX.18)
P0 =
2
2 q2
6
~ 2 |~aret. |2 = 2 q
γ
1
−
β
γ 4 |~aret. |2 .
ret.
ret.
3 4π0 c3
3 4π0 c3 ret.
(IX.23)
Dazu lautet die Kraft auf die Punktladung F~ (t) = γ(t)m~a(t), so dass diese Leistung sich noch
schreiben lässt als
2
q2
2
2 ~
F (tret. ) .
γret.
P0 =
2
3
3 4π0 m c
Die abgestrahlte Leistung ist also größer um einen Faktor γ 2 als im Fall einer Linearbewegung mit
der gleichen Kraft. Somit wird mehr Energie als sog. Synchrotronstrahlung in einem kreisförmigen
Teilchenbeschleuniger (einem „Speicherring“, wie z.B. das LHC am CERN) verloren, als in einem
Linearbeschleuniger.
Bemerkung: Wenn ein geladenes Teilchen auf Materie stoßt und dort von Wechselwirkungen mit
den Atomen gebremst wird, strahlt es ab. Die entsprechende Strahlung wird Bremsstrahlung (auch
auf Englisch!) genannt.
Literatur
• Feynman [3, 4], Kapitel 21 & [17, 18], Kapitel 34.
• Griffiths [6], Kapitel 10.2–10.3 & 11.2
• Jackson [7], Kapitel 12.11 & 14.1–14.4
• Landau–Lifschitz [8], Kapitel 8 § 62–64 & Kapitel 9 § 73–76
• Nolting [9], Kapitel 4.5
• Schwinger [14], Kapitel 31–32.
IX. Klassische Theorie der Strahlung
88
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
Literaturverzeichnis
[1] C. Cohen-Tannoudji, J. Dupont-Roc, G. Grynberg, Photons and atoms — Introduction to
quantum electrodynamics (Wiley-VCH, Weinheim, 2004).
[2] J. A. Hera, G. Báez, Eur. J. Phys. 30 (2009) 23–33.
[3] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume II :
Mainly Electromagnetism and Matter , definitive Aufl. (Addison Wesley, Reading, 2005).
[4] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 2 : Elektromagnetismus und Struktur der Materie, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München,
2007).
[5] T. Fließbach, Lehrbuch zur theoretischen Physik II. Elektrodynamik , 5. Aufl. (Spektrum Akademischer Verlag, Heidelberg, 2008).
[6] D. J. Griffiths, Elektrodynamik : Eine Einführung, 3. Aufl. (Pearson, München, 2011).
[7] J. D. Jackson, Classical electrodynamics, 3. Aufl. (John Wiley & Sons, New York, 1999).
[8] L. Landau, E. Lifschitz, Lehrbuch der theoretischen Physik. Band II : Klassische Feldtheorie,
12. Aufl. (Harri Deutsch, Frankfurt am Main, 1997).
[9] W. Nolting, Grundkurs Theoretische Physik. Band 3 : Elektrodynamik , 8. Aufl. (Springer, Berlin
& Heidelberg, 2007).
[10] W. Nolting, Grundkurs Theoretische Physik. Band 4 : Spezielle Relativitätstheorie. Thermodynamik , 6. Aufl. (Springer, Berlin & Heidelberg, 2005).
[11] K. Schwarzschild, Nachr. Ges. Wiss. Göttingen (1903) 126–131.
[12] J.-M. Lévy-Leblond, Am. J. Phys. 39 (1971) 502–506.
[13] F. Scheck, Theoretische Physik 3 : Klassische Feldtheorie, 2. Aufl. (Springer, Berlin & Heidelberg, 2006).
[14] J. Schwinger, L. L. DeRaad, Jr., K. A. Milton, W.-y. Tsai, Classical electrodynamics (Perseus,
Reading, MA, 1998).
[15] P. Aichelburg, R. Beig, Ann. Phys. (NY) 98 (1976) 264–283.
[16] J. A. Wheeler, R. P. Feynman, Rev. Mod. Phys. 17 (1945) 157–181.
[17] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume I : Mainly
Mechanics, Radiation, and Heat, definitive Aufl. (Addison Wesley, Reading, 2005).
[18] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 1 : Mechanik, Strahlung, Wärme, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München, 2007).
89
N.BORGHINI
Elektrodynamik einer Punktladung
Theoretische Physik IV
90
Teil C
Elektrodynamik in Materie
Version vom 18. Juli 2013, 9:54
91
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Die Grundgesetze der Elektrodynamik — die Maxwell–Newton-Gleichungen — sind mikroskopische Gesetze, d.h. Zusammenhänge zwischen Felder auf einer mikroskopischen Skala `, typischerweise der atomaren Skala. Solche „lokalen“ Felder werden im Folgenden mit Kleinbuchstaben geschrieben: elektrisches Feld ~e, magnetisches Feld ~b, Ladungsdichte ρ, Stromdichte ~, usw. Damit
lauten die Maxwell-Gleichungen („im Vakuum“)
~ · ~e(t, ~r) = 1 ρ(t, ~r)
∇
0
~
~
∇ · b(t, ~r) = 0
~
~ × ~e(t, ~r) + ∂ b (t, ~r) = ~0
∇
∂t
~ × ~b(t, ~r) − 1 ∂~e (t, ~r) = µ0~(t, ~r).
∇
c2 ∂t
(IX.24a)
(IX.24b)
(IX.24c)
(IX.24d)
Die folgenden Kapiteln befassen sich mit der Elektrodynamik in Materie, d.h. auf einer makroskopischen Skala L ≫ `. Über die Größe eines makroskopischen Körpers können die lokalen Felder
viel variieren. Andererseits entspricht das Auflösungsvermögen eines Messapparats einer Skala R,
die oft erheblich größer als die mikroskopische Skala ist: ` R L. Die gemessenen physikalischen
Größen sind gemittelte Werte der mikroskopischen Felder über diese Skala R.
Die natürlichen Freiheitsgrade der Theorie sind dementsprechend makroskopische Felder, auch
effektive Felder genannt, die hiernach mit Großbuchstaben bezeichnet werden, und die die gemit~ magnetische Induktion B,
~ Ladungsdichte
telten lokalen Felder darstellen: elektrische Feldstärke E,
~
%, Stromdichte J... Wenn f (~r) eine auf 1 normierte Funktion mit einem Träger der Größe R um
~r = ~0 ist,34 die den Mittelungsprozess der Messung beschreibt,35 gelten
Z
~ ~r) = f (~r − ~r 0 ) ~e(t, ~r 0 ) d3~r 0 ≡ h~e(t, ~r)i,
E(t,
(IX.25a)
Z
~ ~r) = f (~r − ~r 0 ) ~b(t, ~r 0 ) d3~r 0 ≡ h~b(t, ~r)i,
B(t,
(IX.25b)
Z
%(t, ~r) = f (~r − ~r 0 ) ρ(t, ~r 0 ) d3~r 0 ≡ hρ(t, ~r)i,
(IX.25c)
Z
~ ~r) = f (~r − ~r 0 ) ~(t, ~r 0 ) d3~r 0 ≡ h~(t, ~r)i.
J(t,
(IX.25d)
Aus den Relationen zwischen den lokalen Felder sollen Zusammenhänge zwischen den effektiven Feldern — makroskopische Gesetze — hergeleitet werden. Das Ergebnis der Mittelung (IX.25)
hängt aber davon ab, wie die Ladungsträger im Material auf externe Felder reagieren, d.h. von den
Eigenschaften des Materials. Deshalb sind für elektrische Leiter, Halbleiter, Isolatoren — mit vielen
Unterklassen — unterschiedliche makroskopische Gesetze zu erwarten.
Bemerkung: Hier werden makroskopische „effektive“ Modelle aus der mikroskopischen „fundamentalen“ Theorie hergeleitet, gemäß der theoretischen Vorgehensweise.36 Historisch wurden aber die
makroskopischen Gesetze vor den mikroskopischen experimentell entdeckt!
34
... oder eine Funktion, deren Support „im physikalischen Sinn“ der Größe R ist, d.h. die schnell gegen 0 strebt.
2
2
3
1
Beispielsweise f (~r) =
Θ(R − |~r|), mit Θ der Heaviside-Funktion, oder f (~r) =
e−~r /R . Eine Diskussion
4πR3
(πR2 )3/2
ist in Ref. [1] zu finden.
35
Hier wird nur die räumliche Mittelung beschrieben, eine realistische Funktion sollte auch die endliche zeitliche
Auflösung der Messapparate berücksichtigen.
36
...die ursprünglich auf H.Lorentz zurückgeht [2].
93
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
X. Elektrostatik und Magnetostatik in Materie
Dieses Kapitel befasst sich mit den elektromagnetischen Feldern in Materie im stationären Regime,
d.h. wenn die mikroskopischen und makroskopischen Felder nicht von der Zeit abhängen.
X.1 Elektrostatik von elektrischen Leitern
Als elektrischer Leiter wird eine Substanz bezeichnet, die frei bewegliche Ladungsträger besitzt,
d.h. Ladungen, die sich unter der Anwendung irgendeiner Kraft bewegen können. Beispiele sind
Metalle, Elektrolytlösungen oder Plasmen.
X.1.1 Konstitutive Gleichung
Entsprechend der Anwesenheit von frei beweglichen Ladungsträgern führt die Anwendung eines
~ r) zur Entstehung einer makroskopischen Stromdichte J(~
~ r). In
beliebigen elektrischen Feldes E(~
manchen Fällen ist die Letztere einfach proportional zur Feldstärke, gemäß dem Ohm-Gesetz in
lokaler Formulierung
~ r) = σel. E(~
~ r),
J(~
(X.1)
mit σel. der elektrischen Leitfähigkeit. Die Letztere kann auch ortsabhängig sein, falls der Leiter
nicht homogen ist — dies kann z.B. passieren, da die elektrische Leitfähigkeit im Allgemeinen
temperaturabhängig ist, wenn die Temperatur nicht gleichförmig im Leiter ist.34
Eine weitere Möglichkeit ist, dass der Leiter anisotrope Eigenschaften aufweist: dann ist die
elektrische Leitfähigkeit ein Tensor 2. Stufe
~ r) = ~~σel. (~r) · E(~
~ r)
J(~
(X.2)
P
bzw. komponentenweise Ji (~r) = j σel.ij (~r)Ej (~r). Ein berühmtes Beispiel ist Graphit, das eine viel
höhere Leitfähigkeit in den Graphen-Ebenen aufweist, als senkrecht dazu.
Im Rest dieses Abschnitts wird nur noch die Elektrostatik von Leitern betrachtet, d.h. die im
~ r) = ~0 gilt. Dazu wird angenommen, dass
Prinzip frei beweglichen Ladungen ruhen, so dass J(~
außerhalb des Leiters Vakuum herrscht.
X.1.2 Leiter im elektrostatischen Gleichgewicht
Ein Leiter ist im elektrostatischen Gleichgewicht, wenn die Ladungsträger keine makroskopische
Bewegung bezüglich eines am Leiter angeschlossenen Bezugssystems haben, d.h. die Stromdichte J~
ist in jedem Punkt null. Dann ist das makroskopische elektrische Feld im Leiter ebenfalls null:
~ = ~0 im Inneren eines Leiters im elektrostatischen Gleichgewicht.
E
(X.3)
Tatsächlich können verschiedene Ursachen zu einer makroskopischen Bewegung der Ladungsträger und dabei einem elektrischen Strom führen: nicht-elektromagnetische Kraftfelder (z.B.
Gravitations- oder Inertialkräfte), Temperaturgradienten (thermoelektrische Effekte), Konzentrationsgradienten (elektrochemische Effekte). . . Somit soll man zwischen mechanischem und
elektrostatischem Gleichgewicht unterscheiden, wobei das Letztere bedeutet, dass die einzige
mögliche Ursache eines Stroms die Anwendung eines elektrisches Feld ist. Im Folgenden werden
diese nicht-elektrostatischen Phänomene ausgeschlossen.
Die Maxwell–Gauß-Gleichung (IX.24a) lässt sich unter Berücksichtigung der Zeitunabhängigkeit
einfach mitteln:
~ · E(~
~ r) = 1 %(~r),
(X.4)
∇
0
34
Dabei soll aber die Bewegung der Ladungsträger wirklich durch das elektrische Feld, nicht durch die Temperaturgradienten verursacht werden. Sonst handelt es sich um einen thermoelektrischen Effekt.
X. Elektrostatik und Magnetostatik in Materie
94
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
was mit der Bedingung (X.3) zu
%(~r) = 0 im Inneren eines Leiters im elektrostatischen Gleichgewicht
(X.5)
führt, d.h. die (freien) Ladungen sitzen auf der Leiteroberfläche.
Die Maxwell–Faraday-Gleichung (IX.24c) führt im stationären Fall zur makroskopischen Gleichung
~ × E(~
~ r) = ~0.
∇
(X.6)
Infolgedessen existiert ein Potential Φ(~r), aus dem sich das elektrische Feld herleiten lässt
~ r) = −∇Φ(~
~ r),
E(~
(X.7)
wobei die Gleichung im ganzen Raum gilt.
~ r) = ~0 im Inneren eines Leiters folgt, dass das elektrische Potential Φ(~r) im ganzen
Aus E(~
Volumen des Leiters konstant ist. Außerhalb des Leiters führen Gl. (X.4) mit % = 0 und Gl. (X.7)
zur Laplace-Gleichung
4Φ(~r) = 0 außerhalb eines Leiters.
(X.8)
Um die Lösungen dieser Gleichung völlig zu charakterisieren, müssen die Randbedingungen an
der Oberfläche des Leiters mithilfe der Gleichungen (X.4) und (X.6) präzisiert werden:35
• Sei eine Kontour Γ um die Oberfläche ∂ V des Leiters, mit Seiten der ∂ V
`
~e2
Länge ` längs ~e1 parallel zu ∂ V und δ längs ~e3 normal zu ∂ V :36
δ
~
e3BMB
~ ×E
~ durch die durch Γ Laut dem Satz von Stokes ist der Fluss von ∇
~e1
abgeschlossene Fläche S
I
Z
2
~
~
~ r) · d~r = E1 (x3 = 0− ) − E1 (x3 = 0+ ) ` + O(δ) = 0,
∇ × E(~r) · ~e2 d S = E(~
S
Γ
wobei die letzte Gleichung aus Gl. (X.6) folgt. Daher gilt E1 (x3 = 0− ) = E1 (x3 = 0+ ) d.h.
E1 ist stetig an der Oberfläche. Analog prüft man die Stetigkeit von E2 nach. Insgesamt ist
~ k des elektrischen Feldes stetig an der Leiteroberfläche und somit
die Tangentialkomponente E
null auch für x3 = 0+ (d.h. gerade außerhalb des Leiters).
In der Nähe der Leiteroberfläche ist das elektrische Feld also normal, d.h. Φ(x3 = 0+ ) ist
konstant, so dass ∂ V eine Äquipotentialfläche darstellt, zu der die Feldlinien senkrecht sind.
~ ⊥ des Feldes an der Oberfläche ist im Allgemeinen nicht null, und
• Die Normalkomponente E
deshalb nicht stetig.
Sei jetzt ein Volumen v , abgegrenzt durch Elementarflächen dS
∂ V dS
~e2
auf den beiden Seiten der Oberfläche ∂ V und durch die Röhre, die
~e3BMB
diese Flächen miteinander verbindet. Der Gauß-Integralsatz gibt
~e1
Z
I
Z
3
2
+
−
~
~
~
∇ · E(~r) d ~r =
E(~r) · d ~s =
E3 (x3 = 0 ) − E3 (x3 = 0 ) dx1 dx2 + O(δ),
v
∂v
dS
wobei ∂ v die Oberfläche des Volumens v bezeichnet. Im Integral auf der rechten Seite gilt
E3 (x3 = 0− ) = 0. Andererseits kann man die Maxwell–Gauß-Gleichung (X.4) benutzen mit
auf der rechten Seite einer Flächenladungsdichte %(~r) = σ(x1 , x2 )δ(x3 ). Damit ergibt sich
Z
Z
Z
%(~r) 3
σ(x1 , x2 )
d ~r =
dx1 dx2 =
E3 (x3 = 0+ ) dx1 dx2 + O(δ),
0
0
v
dS
dS
σ
+
d.h. E3 (x3 = 0 ) =
an der Leiteroberfläche.
0
35
Es wird angenommen, das alle Felder im Unendlichen verschwinden.
Die Richtungen der Koordinatenachsen ändern sich in jedem Punkt ~r der Oberfläche, so dass man ~e1 , ~e2 , ~e3 mit ~r
kennzeichnen sollte. ~e3 (= ~en ) ist in jedem Punkt der nach außen gerichtete Normaleinheitsvektor zur Leiteroberfläche,
so dass x3 = 0+ bzw. x3 = 0− einen Punkt im Äußeren bzw. im Inneren des Leiters bezeichnet.
36
X. Elektrostatik und Magnetostatik in Materie
95
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
Insgesamt ist das elektrische Feld an der Oberfläche eines elektrischen Leiters gegeben durch
~ r) = σ(~r) ~en (~r) in einem Punkt ~r der Leiteroberfläche,
E(~
0
(X.9)
σ(~r)
wobei ~en (~r) den Normaleinheitsvektor zur Oberfläche im Punkt ~r bezeichnet.
stellt also den
0
Sprung E⊥ (~r) der Normalkomponente E⊥ (~r) bei der Oberfläche dar.
Die Gesamtladung Q des Leiters folgt aus der Integration dieses Resultats über die ganze Oberfläche:
Z
Z
Z
2~
2
~
~ r) · d2 S,
~
(X.10)
∇Φ(~
E(~r) · d S = −0
Q=
σ(~r) d S = 0
∂V
∂V
∂V
mit d2 S~ = d2 S ~en (~r) in jedem Punkt der Oberfläche.
Bemerkungen:
~ von den positiv geladenen Bereichen des Leiters
∗ Gleichung (X.9) bedeutet, dass das Feld E
stammt und in den negativ geladenen Bereichen endet.
~ = ~0 in der unmittelbaren Nachbarschaft
∗ Eine detaillierte Analyse zeigt, dass die Bedingung E
der Oberfläche tatsächlich nicht erfüllt wird. Folglich sind die Ladungsträger nicht auf der „mikroskopischen“ Oberfläche, sondern über eine Dicke von einigen Atomschichten verteilt. Wiederum ist
~ nicht unstetig, sondern dessen Betrag variiert von 0 bis σ/0 über
für feine Auflösungen das Feld E
diese gleiche Dicke.
∗ Laut der Relation (X.9) hängt das elektrische Feld in einem Punkt ~r der Leiteroberfläche nur von
der „lokalen“ makroskopischen Ladungsverteilung σ(~r) im selben Punkt ab, nicht von der Verteilung
der anderen Ladungen.
~ 1 = σ/(20 )~en des
Außerdem sieht es so aus, als ob Gl. (X.9) in Widerspruch zum Ausdruck E
Feldes einer unendlich ausgedehnten Ebene stände (s. z.B. Demtröder [3] Kapitel 1.2.1).
Sei ein Flächenelement d2 S der Leiteroberfläche sowie ein unendlich benachbarter Punkt M : von
M aus wird d2 S unter einem Raumwinkel 2π gesehen, d.h. wie eine unendliche Ebene, so dass
~ 1 = σ/(20 )~en ist. Folglich ist das durch die anderen
das durch d2 S erzeugte Feld in M gerade E
2
Ladungen — des Leiters, zu dem d S gehört, oder anderer Leiter — erzeugte Feld in M gegeben
~ 2 = σ/0~en − E
~ 1 = σ/(20 )~en , unabhängig von der genauen Verteilung jener anderen
durch E
Ladungen.
Sei jetzt der Punkt M 0 symmetrisch von M bezüglich der Leiteroberfläche. Das durch die anderen
~ 2 , weil M und M 0 für entfernte LaLadungen erzeugte Feld in M 0 ist dasselbe wie in M , d.h. E
2
~ 0 = σ/(20 )(−~en ):
dungen denselben Punkt darstellen. Andererseits erzeugt d S in M 0 ein Feld E
1
0
0
~
~
~
insgesamt ist das Feld in M genau E1 + E2 = 0, wie in einem Punkt im Inneren des Leiters zu
erwarten ist. Gleichung (X.9) lässt sich also mit dem Feld einer unendlich ausgedehnten Ebene
vereinbaren.
X.1.3 Elektrisches Feld außerhalb eines Leiters
Das elektrische Potential im Äußeren eines Leiters bzw. eines Systems von Leitern lässt sich
berechnen durch Lösung der Laplace-Gleichung (X.8) mit den Randbedingungen Φ = const. an der
Oberfläche ∂ V a jedes Leiters und mit dem Zusammenhang (X.10) für jeden Leiter. Dann ist das
elektrische Feld durch Gl. (X.7) gegeben.
Einige Eigenschaften des elektrischen Felds im Äußeren eines Leiters können mithilfe qualitativer
Argumente hergeleitet werden. Ein gutes Beispiel davon ist das
X. Elektrostatik und Magnetostatik in Materie
96
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
X.1.3
a Feld in der Nachbarschaft einer Spitze
:::::::::::::::::::::::::::::::::::::::::::::
Sei ein geladener elektrischer Leiter mit einer Spitze, d.h. mathematisch einem Bereich hoher
Krümmung.
B
A
~ normal. Somit wächst der Querschnitt einer
An der Leiteroberfläche ist das elektrische Feld E
~ konstant bleibt — viel schneller in der Nachbarschaft der
Feldröhre — durch die der Fluss von E
Spitze (Punkt A) als in Bereichen kleinerer Krümmung wie in der Umgebung des Punkts B.
Andererseits wird weit vom Leiter dieser als punktförmig gesehen, so dass dessen Feld denselben
Wert in davon gleich entfernten Punkten annimmt. Bei solchen Abständen ist der Fluss des elektri~ identisch. Wenn man die Feldlinien von E
~
schen Felds durch gleich große Flächen senkrecht zu E
von großen Abständen aus heraufkommt, folgt aus der Erhaltung des Flusses, dass das Feld höhere
Werte in A als in B annimmt.
Bemerkung: Eine Berechnung des elektrischen Felds in der Nachbarschaft einer kegelförmigen
Spitze auf einem Leiter befindet sich in Landau–Lifschitz [4] § 3 Aufgabe 4.
X.1.3 b Spiegelladungsmethode
Quantitative Lösungen für die Feldkonfiguration außerhalb eines Leiters können in einigen Fällen
auch analytisch berechnet werden. Eine geeignete Methode beruht auf der Unizität der Lösung der
Laplace-Gleichung mit gegebenen Randbedingung.
::::::::::::::::::::::::::::::
Sei ein zu lösendes Problem
P P 1 mit einem Leiter und Ladungen außerhalb davon, entsprechend
einer Ladungsdichte %(~r) = i qi δ (3) (~r − ~xi ), mit ~xi den Positionen der Ladungen. Sei dann ein
anderes Problem P 2 ohne Leiter aber mit denselben Ladungen an den ~xi sowie zusätzlichen Ladungen („Spiegelladungen“) innerhalb des durch den Leiter leer gelassenen Raums. Wenn das (lösbare!)
Problem P 2 zu einem Potential Φ führt, wovon eine Äquipotentialfläche mit der Fläche des Leiters
vom Problem P 1 übereinstimmt, dann ist das Potential außerhalb dieser Äquipotentialfläche gleich
dem Potential von P 1 außerhalb des Leiters.
Als Beispiel dieser Methode sei das Problem P 1 eines Leiters, der den
@
@
Halbraum z > 0 füllt, mit einer Punktladung q außerhalb des Leiters im
@
@
q
q0
-•
Punkt ~xq = (0, 0, −a). Im Bereich z < 0 — d.h. im Äußeren des Leiters —
• a - @
@ a
@
ist das Potential Lösung der Poisson-Gleichung 4Φ(~r) = qδ (3) (~r − ~xq )/0 ,
@
z
@
@
mit der Randbedingung Φ = Konstante für z = 0.
Sei dann das Problem P 2 mit zwei Punktladungen in einem sonst leeren Raum: eine Punktladung
q sitzt im Punkt ~xq = (0, 0, −a) und eine Punktladung q 0 im Punkt −~xq = (0, 0, a). Diese Ladungen
erzeugen das Potential
q
q0
Φ(~r) =
+
,
4π0 |~r − ~xq | 4π0 |~r + ~xq |
q (3)
q0
δ (~r − ~xq ) + δ (3) (~r + ~xq ) im ganzen Raum.
0
0
Dieses Potential stellt eine spezielle Lösung der Gleichung 4Φ(~r) = qδ (3) (~r − ~xq )/0 für z ≤ 0 dar,
die konstant (und null) für z = 0 ist wenn q 0 = −q. Das Potential Φ ist also auch Lösung für z ≤ 0
des ursprünglichen Problems P 1 .37
Lösung von 4Φ(~r) =
X.1.4 Elektrostatische Energie eines Systems von elektrischen Leitern
37
Die zweite Randbedingung, betreffend den Betrag des Felds an der Leiteroberfläche bzw. die Gesamtladung des
Leiters, wurde hier wegen der unendlichen Ausdehnung des Leiters nicht präzisiert.
X. Elektrostatik und Magnetostatik in Materie
97
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
Sei ein System von elektrischen Leitern a, b, c... mit jeweils der Ladung bzw. dem Potential Qa ,
Qb , Qc ... bzw. Φa , Φb , Φc ... Die nach außen gerichteten Normaleinheitsvektoren zu den Leiteroberflächen ∂ V a , ∂ V b , ∂ V c ... werden als ~na , ~nb , ~nc ... bezeichnet.
~ r)2 /2
Die elektrostatische Energie des Systems folgt aus der Integration der Energiedichte 0 E(~
über das ganze Volumen V außerhalb der Leiter:
Z
Z
Z
0 ~ 2 3
0
0 ~ 3
~
~
~ r) − Φ(~r) ∇
~ · E(~
~ r) d3~r.
E =
E(~r) d ~r = −
E(~r) · ∇Φ(~r) d ~r = −
∇ · Φ(~r)E(~
2 V
2 V
2 V
~ · E(~
~ r) = 0 einsetzen, und zum anderen das
Im Term auf der rechten Seite kann man zum einen ∇
~ r) mithilfe des Integralsatzes von Gauß in ein OberfläVolumenintegral der Divergenz von Φ(~r) E(~
chenintegral transformieren. Ein Teil der Oberfläche des Volumens V sitzt im Unendlichen, wo die
Felder als null angenommen werden, und der Rest entspricht den Oberflächen der Leiter. Dann gilt
Z
0 X
~ r) · (−d2 S ~nj ),
E =−
Φ(~r)E(~
2
∂Vj
j
d.h. unter Berücksichtigung der Gleichförmigkeit des Potentials an jeder Leiteroberfläche sowie der
Beziehung (X.10)
X1
E =
Φj Qj ,
(X.11)
2
j
analog der Energie eines Systems von Punktladungen.
Bemerkung: In der Berechnung der elektrostatischen Energie wurden die Beiträge der Leiter weggelassen, indem die Energiedichte nur über das Volumen außerhalb der Leiter integriert wurde. Dies
kommt dem
der inneren Energien der Leiter gleich: innerhalb jedes Leiters ist zwar
Vernachlässigen
~ r) = ~0, ~e(~r)2 ist aber nicht Null.
E(~
~ des
Sei jetzt eine Variation δQj der Ladungen. Eine solche Variation führt zu einer Änderung δ E
Feldes im Bereich außerhalb der Leiter, und damit zu einer Variation der elektrostatischen Energie38
Z
X
~ r) · δ E(~
~ r) d3~r =
δE = 0 E(~
Φj δQj ,
V
j
wobei die zweite Gleichung aus einer Herleitung analog zur Berechnung der Energie folgt. Dieses
Resultat kann nur mit Gl. (X.11) in Übereinstimmung gebracht werden, wenn jede Ladung Qj eine
Linearkombination der Potentiale ist:
X
Qj =
Cji Φi , ∀j.
(X.12)
i
Die Cji heißen Kapazitätskoeffizienten. Diese Relationen können invertiert werden
X
−1
Φj =
Cji
Qi , ∀j,
(X.13)
i
−1
mit Cji
den Koeffizienten der inversen Matrix zu der der Cji .
Somit lautet schließlich die elektrostatische Energie (X.11)
X1
X1
Cij Φi Φj =
C −1 Qi Qj ,
E =
2
2 ij
d.h. Cij =
38
(X.14)
i,j
i,j
∂2E
∂2E
−1
bzw. Cij
=
.
∂Φi ∂Φj
∂Qi ∂Qj
Wenn man statt der Ladungen die Potentiale variieren lässt, lautet die darausfolgende Energievariation
X
δE =
Qj δΦj .
j
X. Elektrostatik und Magnetostatik in Materie
98
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Bemerkung: Aus diesen Relationen folgen nach Austausch der Ordnung der Ableitungen die Sym−1
−1
metrien Cij = Cji bzw. Cij
= Cji
.
Literatur
• Feynman [5, 6], Kapitel 5-9–5-10, & 6-6–6-12
• Griffiths [7], Kapitel 2.5 & 3.2
• Landau–Lifschitz [4], Kapitel I § 1–3 und Kapitel III § 21.
X.2 Elektrostatik von Dielektrika
Ein schwach- oder nichtleitendes Medium — entsprechend der Abwesenheit von frei beweglichen
Ladungsträgern — wird allgemein als Dielektrikum bezeichnet.
X.2.1 Elektrische Kraft auf einen Körper. Polarisationsvektor
Ein Körper, bestehend aus geladenen Teilchen mit der mikroskopischen Ladungsdichte ρ(~r),
~ r), das sich nur langsam im Raum ändert. Die
sei in einem externen elektrostatischen Feld E(~
~ r), vgl. (VII.3).
mikroskopische elektrische Kraftdichte im Punkt ~r ist ρ(~r)E(~
Die Mittelung dieser Kraftdichte über mesoskopische Skalen führt zur gemittelten Kraftdichte
Z
~
~ r 0 ) d3~r 0 ,
hρE(~r)i = f (~r −~r 0 )ρ(~r 0 ) E(~
mit f der schon eingeführten Mittelungsfunktion. Das langsam variierende Feld kann um den Punkt
~r Taylor-entwickelt
Z werden:
~ r)i = f (~r −~r 0 ) ρ(~r 0 ) E(~
~ r) + (~r 0 − ~r) · ∇
~ E(~
~ r) + · · · d3~r 0
hρE(~
Z
Z
0
0
3 0 ~
0
0
0
3 0
~ E(~
~ r) + · · ·
=
f (~r −~r )ρ(~r ) d ~r E(~r) +
f (~r −~r )ρ(~r )(~r − ~r) d ~r · ∇
Man erkennt im ersten Term der zweiten Zeile die gemittelte Ladungsdichte % im Punkt ~r. Das
Integral im zweiten Term definiert ein Vektorfeld P~ (~r), die dielektrische Polarisation. Damit lautet
die gemittelte Kraftdichte
~ r)i = %(~r)E(~
~ r) + P~ (~r) · ∇
~ E(~
~ r) + · · ·
hρE(~
(X.15)
Diese gemittelte Kraftdichte kann dann über das Volumen des Körpers integriert werden, um
~ E
~ durch partielle Integration
die gesamte elektrische Kraft zu liefern. Dabei wird der Term (P~ · ∇)
~ · P~ )E
~ und
behandelt, d.h. dessen Integral wird durch die Summe des Volumenintegrals von −(∇
eines Oberflächenterms ersetzt. Unter Weglassen des Letzteren und der Beiträge höherer Ordnung
in der Taylor-Reihe ergibt sich
~ r)i ' %(~r)E(~
~ r) − ∇
~ · P~ (~r) E(~
~ r) ≡ %eff (~r)E(~
~ r).
hρE(~
Die effektive gemittelte Ladungsdichte lautet also
~ · P~ (~r).
%eff (~r) = %(~r) − ∇
(X.16)
Zur Ladungsdichte % können einerseits „gebundene“ Ladungsträger — die Atome bzw. Moleküle
des Dielektrikums — beitragen, und zum anderen „freie“ (oder „externe“) Ladungen, entsprechend
einer gemittelten Ladungsdichte %frei = hρfrei i. Üblicherweise wird angenommen, dass die gebundenen Ladungsträger zu einer null makroskopischen Ladungsdichte führen — d.h. das Dielektrikum
~ · P~ .
ist elektrisch neutral —, so dass % = %frei und %eff = %frei − ∇
Die dielektrische Polarisation beschreibt die durch das äußere elektrische Feld induzierte Verschiebung der elektrischen Ladungen im Dielektrikum. Dieser Verschiebung können unterschiedliche
X. Elektrostatik und Magnetostatik in Materie
99
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Effekte beitragen, je nach der Art des Dielektrikums:
• Besteht das Letztere aus polaren Molekülen (mit einem nichtverschwindenden elektrischen
Dipolmoment), so führt die Anlegung des elektrischen Feldes zur Ausrichtung der molekülaren
Dipolmomente, und somit zur makroskopischen Polarisation.
• In einem Dielektrikum bestehend aus unpolaren Molekülen verschiebt das äußere elektrische
Feld die negativ geladene Elektronwolke jedes Atoms gegen den jeweiligen positiv geladenen
Kern: dies induziert ein elektrisches Dipolmoment, das zur dielektrischen Polarisation beiträgt.
Bemerkungen:
∗ Hier wurde die Gültigkeit des Ausdrucks (X.16) als gemittelte Ladungsdichte eines makroskopischen Körpers am Beispiel der Kraft in einem externen elektrischen Feld gezeigt. Das Resultat
gilt aber allgemein für jede „elektrische Anregungsfunktion“, mit der der Körper sondiert wird.
Tatsächlich stellt die Entwicklung (X.15) den Anfang einer Multipolentwicklung dar.
∗ Seiner Definition nach ist die dielektrische Polarisation gleich dem elektrischen Dipolmoment pro
Volumen. Folglich ist die SI-Einheit für |P~ | das C·m−2 .
X.2.2 Makroskopische elektrostatische Gleichungen. Elektrische Flussdichte
Dank der Linearität der Mittelung lassen sich die Maxwell–Gauß- und die Maxwell–FaradayGleichung einfach mitteln zu
~ · E(~
~ r) = %eff (~r) .
∇
(X.17a)
0
und
~ × E(~
~ r) = ~0
∇
(X.17b)
Wenn man den Ausdruck (X.16) der effektiven Ladungsdichte in die erstere Gleichung einsetzt und
die elektrische Flussdichte
~ r) = 0 E(~
~ r) + P~ (~r)
D(~
(X.17c)
einführt, wird Gl. (X.17a) zu
~ · D(~
~ r) = %frei (~r).
∇
(X.17d)
Bemerkungen:
∗ Aus der Maxwell–Faraday-Gleichung (X.17b) folgt, dass man ein elektrisches Potential Φ(~r)
~ r) = −∇Φ(~
~ r). Die makroskopische Maxwell–Gauß-Gleichung liefert aber
einführen kann, mit E(~
keine „einfache“ Gleichung für Φ(~r), im Gegensatz zur Poisson-Gleichung im Vakuum.
∗ Der Vorteil der elektrischen Flussdichte soll sein, dass ρfrei den „von außen“ kontrollierbaren
Ladungen entspricht. In der Tat kontrolliert ein Experimentator eher das angewandte Potential,
~
und somit die elektrische Feldstärke E.
∗ Gemäß ihrer Definition hat die elektrische Flussdichte — die auch dielektrische Verschiebung
oder elektrische Erregung genannt wird — die gleiche Einheit wie die Polarisation, d.h. das C·m−2
im SI-System.39
39
~ = E+4π
~
~ gegeben, während Gl. (X.17d)
Im Gauß’schen Einheitensystem wird die elektrische Flussdichte durch D
P
~
~
∇ · D = 4π%frei lautet.
X. Elektrostatik und Magnetostatik in Materie
100
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
∗ Der lokalen Formulierung (X.17d) entspricht dank dem Gauß’schen Integralsatz die Integralform
der makroskopischen Maxwell–Gauß-Gleichung
I
~ r) · d2 S~ = Qfrei ,
D(~
S
mit Qfrei der Gesamtladung im durch die Oberfläche S abgegrenzten Volumen.
∗ Die effektive Ladungsdichte (X.16) zieht nur die zwei ersten Terme in der Multipolentwikklung (X.15) in Betracht und stellt also eine Näherung der kompletten Formel dar. Analog ist
Gl. (X.17c) nur die Trunkierung eines längeren Ausdrucks, s. Jackson [8] Kapitel 6.6.
X.2.3 Felder an der Oberfläche eines Dielektrikums
Wie im Abschn. X.1.2 folgt aus der Gleichung (X.17b) die Stetigkeit der Tangentialkomponente
~ k der elektrischen Feldstärke an der Oberfläche eines Dielektrikums.
E
Andererseits liefern Argumente analog zu denen, die zum Ausdruck (X.9) des Sprungs der Nor~ ⊥ bei einer Leiteroberfläche führen, das Verhalten der elektrischen Flussdichte an
malkomponente E
der Oberfläche eines Dielektrikums:
• Wenn freie Ladungsträger auf der Oberfläche ∂ V stehen, entsprechend einer Flächenladungs~ gegeben durch
dichte σfrei , wird der Sprung der Normalkomponente von D
~ ⊥ (~r) = σfrei (~r)~en (~r) für ~r ∈ ∂ V ,
D
(X.18a)
mit ~en (~r) dem Normaleinheitsvektor zur Oberfläche im Punkt ~r.
Dies gilt insbesondere, im Fall wo die Oberfläche das Dielektrikum von einem geladenen Leiter
trennt, der freie Ladungen auf seine Oberfläche trägt.
~ ⊥ stetig.
• Wenn die Flächenladungsdichte null ist, dann ist die Normalkomponente D
Zusammenfassend lauten die Randbedingungen an der Oberfläche eines Dielektrikums
~ r) = 0 und ~en (~r) · D(~
~ r) = σfrei (~r) in einem Punkt ~r der Oberfläche, (X.18b)
~en (~r) × E(~
mit σfrei der Flächenladungsdichte und ~en dem Normaleinheitsvektor.
X.2.4 Modelle für die dielektrische Polarisation
Die Lösung der Gleichungen (X.17) erfordert einen weiteren Zusammenhang, um die dielektrische
Polarisation bzw. die elektrische Flussdichte mit der elektrischen Feldstärke zu verknüpfen. Ein
solcher Zusammenhang wird konstitutive Gleichung genannt und hängt von einem Modell für die
mikroskopische Physik ab, wie sich an den oben diskutierten Quellen der Polarisation ahnen lässt.
Übliche Modelle sind40
• Die dielektrische Polarisation ist proportional zum elektrischen Feld,
~ r),
P~ (~r) = χe 0 E(~
(X.19a)
mit einem ortsunabhängigen Proportionalitätsfaktor. Dieses Modell setzt ein homogenes und
isotropes Medium voraus.
Der dimensionslose Koeffizient χe heißt elektrische Suszeptibilität.
Damit ergibt sich
~ r) = (1 + χe )0 E(~
~ r) ≡ r 0 E(~
~ r),
D(~
(X.19b)
mit r der relativen Permittivität und ≡ r 0 der Permittivität des Dielektrikums.
40
In Ref. [9] wird ein Überblick über unterschiedliche mögliche konstitutive Gleichungen dargestellt.
X. Elektrostatik und Magnetostatik in Materie
101
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
~ r), d.h. das Medium ist noch isotrop, aber nicht mehr homogen.
• P~ (~r) = χe (~r)0 E(~
X
• Pi =
χe,ij 0 Ej , d.h. die Polarisation hängt linear von der elektrischen Feldstärke ab.
j
Die χe,ij bilden die Elementen eines Tensors zweiter Stufe ~~χe , des elektrischen Suszeptibilitätstensors.
P
Dementsprechend gilt Di = j r,ij 0 Ej mit r,ij = 1 + χe,ij den Elementen des (relativen)
~r .
dielektrischen Tensors ~
Man kann zeigen, dass diese Tensoren symmetrisch sind: χe,ij = χe,ji bzw. r,ij = r,ji . Außerdem existiert eine Basis, in der sie diagonal sind.
Eine solche konstitutive Gleichung beschreibt ein Medium, das nicht mehr isotrop ist, sondern
zeigt bevorzugte Richtungen, wie z.B. die Achsen des Gitters in einem Kristall. Dann kann
passieren, dass die Polarisation immer parallel zu einer dieser Richtungen ist, auch wenn das
~ nicht entlang derselben Richtung ist.
äußere Feld E
• Die obigen Modelle, wie solche für elektrische Leiter im Abschn. X.1.1, beschreiben lineare
Medien — oder, genauer gesagt, dielektrische Medien im Regime, wo ihre Response linear ist.
Eine weitere Möglichkeit ist
X (1)
X (2)
Pi =
χe,ij 0 Ej +
χe,ijk 0 Ej Ek + · · · ,
j
j,k
~ hängt nicht-linear von E
~ ab.41
d.h. P~ (und folglich D)
Ein solcher Zusammenhang gilt insbesondere für starke elektrische Felder.
• Einige Substanzen, sog. Ferroelektrika wie z.B. Bariumtitanat BaTiO3 , weisen eine spontane
Polarisation P~ = P~0 6= ~0 auch bei verschwindendem elektrischen Feld auf. Auch hier ist der
~ und E
~ nicht linear.
Zusammenhang zwischen D
• Bei Piezoelektrika (z.B. Quarz) führt eine mechanische Spannung zu einer Polarisation auch
~ = ~0. Somit stellt ein Piezoelektrikum unter mechanischer Spannung ein Beispiel von
bei E
Ferroelektrikum dar.
Umgekehrt verformt sich ein Piezoelektrikum unter Anwendung einer elektrischen Spannung.
Bemerkungen:
∗ Die in Gl. (X.19b) eingeführte relative Permittivität r stellt in der Tat den Wert bei NullFrequenz der relativen dielektrischen Funktion r (ω) dar. Somit wird sie manchmal Dielektrizitätskonstante oder Dielektrizitätszahl genannt.
∗ Mithilfe thermodynamischer Betrachtungen kann man zeigen, dass die elektrische Suszeptibilität
eines Dielektrikums immer positiv ist, χe > 0.
∗ Formell kann ein elektrischer Leiter als ein Dielektrikum mit unendlich großer Permittivität
betrachtet werden.
Sei ein durch zwei parallele Ebenen abgegrenzter makroskopischer Körper,
~ ext.
E
beschrieben durch das Gesetz (X.19b) mit konstanter Permittivität , in einer
6 ~ ext. senkrecht zu den Ebenen.
gleichförmigen äußeren elektrischen Feldstärke E
E
~ Außerhalb des Körpers herrscht Vakuum, mit der elektrischen Flussdichte
~ ext. = 0 E
~ ext. . Auf der Körperoberfläche sitzen keine freie Ladungen.
D
~ im Inneren des Körpers folgt aus der elektrischen Flussdichte D.
~ Wegen
Die elektrische Feldstärke E
~ ⊥ [Gl. (X.18a)] gilt E
~ = D/
~ =D
~ ext. / = E
~ ext. /r . Für einen
der Stetigkeit der Normalkomponente D
41
~
Manchmal wird diese Nichtlinearität als eine E-abhängige
elektrische Suszeptibilität geschrieben.
X. Elektrostatik und Magnetostatik in Materie
102
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
~ = ~0 im elektrostatischen Gleichgewicht gelten, was sich im Limes r → ∞ erhalten
Leiter muss E
lässt.
Literatur
• Feynman [5, 6], Kapitel 10, 11 & 31-1
• Griffiths [7], Kapitel 4
• Jackson [8], Kapitel 4.3
• Landau–Lifschitz [4], Kapitel II § 6–7
• Schwinger [10], Kapitel 4.
X.3 Magnetostatik in Materie
Dieser Abschnitt befasst sich mit der makroskopischen Beschreibung der magnetischen Eigenschaften eines leitenden oder nichtleitenden Körpers im stationären Regime.
X.3.1 Magnetisierung
Man kann zeigen,42 dass die Mittelung der mikroskopischen Stromdichte ~(~r) über mesoskopische
Gebiete eines makroskopischen Körpers zur effektiven Stromdichte
~ r) + ∇
~ ×M
~ (~r),
J~eff (~r) = J(~
~ r) = h~(~r)i [Gl. (IX.25d)] und die Magnetisierung M
~ (~r) definiert ist durch
führt, wobei J(~
Z
~ (~r) = 1 f (~r − ~r 0 )(~r 0 − ~r) × ~(~r 0 ) d3~r 0 .
M
2
Die Magnetisierung stellt also das magnetische Dipolmoment pro Volumeneinheit dar.
(X.20)
(X.21)
Bemerkungen:
∗ Gemäß ihrer Definition ist die Magnetisierung ein Axial vektorfeld.
∗ Die SI-Einheit der Magnetisierung ist das A·m−1 .
~ ×M
~ (~r) in der
Trotz dessen Bezeichnung als Magnetisierungsstromdichte trägt der Term ∇
effektiven Ladungsstromdichte (X.20) nicht zur makroskopischen Bewegung von Ladungsträgern bei,
~ r) bestimmt.
d.h. zum elektrischen Strom. Der Letztere wird völlig durch die Leitungsstromdichte J(~
Sei Γ eine Kontour, die den Querschnitt eines makroskopischen Körper umschließt, und S die
durch Γ abgegrenzte Fläche. Der Fluss der effektiven Stromdichte durch S ist
Z
Z
Z
~ r) · d2 S~ +
~ ×M
~ (~r) · d2 S.
~
J~eff (~r) · d2 S~ = J(~
∇
S
S
S
Der zweite Term lässt sich mithilfe des Integralsatzes von Stokes als das Integral der Magneti~ (~r) entlang Γ — d.h. außerhalb des Körpers, wo M
~ (~r) = ~0 — umschreiben, und ist
sierung M
daher null. Somit ist der Fluss der effektiven Stromdichte durch den Querschnitt des Körpers
gleich dem Fluss der Leitungsstromdichte allein.
Die Leitungsstromdichte ist — im Gegensatz zur Magnetisierung — keine Eigenschaft des Körpers, sondern wird durch eine äußere Anregung (elektrisches Feld, Temperatur- bzw. Konzentrationsgradient...) erzeugt.
42
Dies wird z.B. in Schwinger [10] Kapitel 4 im zeitabhängigen Fall bewiesen: dabei tritt ein zusätzlicher Term
~
∂ D/∂t auf, der im stationären Fall verschwindet.
X. Elektrostatik und Magnetostatik in Materie
103
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
~ ×M
~.
• Im Inneren eines Dielektrikums gilt definitionsgemäß J~ = ~0, d.h. J~eff = ∇
An der Oberfläche des Dielektrikums ist die Existenz einer Flächenstromdichte J~ noch möglich.
• In einem elektrischen Leiter ist dank der Anwesenheit frei beweglicher Ladungen eine nichtverschwindende Leitungsstromdichte J~ möglich. Wird diese durch ein angewandtes elektrisches
Feld erzeugt, so gilt eine der konstitutiven Gleichungen des Abschn. X.1.1, wie z.B. das (lokale)
Ohm-Gesetz (X.1).
X.3.2 Makroskopische magnetostatische Gleichungen. Magnetische Feldstärke
Die Mittelung der mikroskopischen Maxwell–Thomson- und Maxwell–Ampère-Gleichungen im
stationären Fall liefert
~ · B(~
~ r) = 0,
(X.22a)
∇
und
~ × B(~
~ r) = µ0 J~eff (~r).
∇
(X.22b)
Wenn man die effektive Ladungsstromsdichte durch seinen Ausdruck (X.20) in die letztere Gleichung
einsetzt und die magnetische Feldstärke
~
~ r) = B(~r) − M
~ (~r)
H(~
µ0
(X.22c)
~ × H(~
~ r) = J(~
~ r).
∇
(X.22d)
einführt, wird Gl. (X.22b) zu
Bemerkungen:
∗ Die Maxwell–Thomson-Gleichung (X.22a) führt wie im Vakuum zur Einführung eines Vektor~ r) mit B(~
~ r) = ∇
~ × A(~
~ r).
potentials A(~
∗ Wie im Fall der elektrischen Flussdichte (X.17c) stellt Definition (X.22c) eine Trunkierung einer
kompletteren Formel dar, s. Jackson [8] Kapitel 6.6.
∗ Die SI-Einheit43 der magnetischen Feldstärke (auch manchmal magnetische Erregung genannt)
ist das A·m−1 .
Der lokale Zusammenhang (X.22d) lässt sich mithilfe des Integralsatzes von Stokes integrieren
und liefert das (integrale) Ampère-Gesetz
I
~ · d~` = I,
H
(X.23)
Γ
mit I dem elektrischen Strom durch die durch Γ abgegrenzte Fläche, der durch einen Amperemeter
gemessen wird.
X.3.3 Randbedingungen an der Oberfläche eines magnetischen Materials
In Analogie zur Stetigkeit der Normalkomponente der elektrischen Flussdichte in Abwesenheit
~ · D(~
~ r) = 0 gilt, führt die Integration der makroskopivon Flächenladungsdichten, also wenn ∇
schen Maxwell–Thomson-Gleichung (X.22a) über ein Volumen abgegrenzt durch Elementarflächen
auf den beiden Seiten der Oberfläche zur Stetigkeit der Normalkomponente B⊥ der magnetischen
Flussdichte.
43
Im Gauß’schen Einheitensystem lautet die makroskopische Stromdichte (X.20) bzw. die magnetische Feldstärke
~
~ ×M
~ bzw. H
~ =B
~ − 4π M
~ . Damit wird Gl. (X.22d) zu ∇
~ ×H
~ = 4π J/c.
~
Jeff = J~ + c∇
X. Elektrostatik und Magnetostatik in Materie
104
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Sei eine Kontour Γ um die Oberfläche ∂ V des makroskopischen Körpers, mit Seiten der Länge
~ ×H
~ durch die durch
` entlang ~e2 parallel zu ∂ V und δ entlang ~e3 normal zu ∂ V . Der Fluss von ∇
44
Γ abgeschlossene Fläche S lässt sich mit dem Satz von Stokes berechnen
I
Z
2
~
~
~ r) · d~` = H2 (x3 = 0− ) − H2 (x3 = 0+ ) ` + O(δ) ' − H2 `.
∇ × H(~r) · ~e1 d S = H(~
S
Γ
Dies ist gleich dem Fluss durch S der Leitungsstromdichte, der im Limes δ → 0 nur von der
Leitungsstromdichte auf der Oberfläche ∂ V abhängt.
~ × H(~
~ r) = ~0, so dass H2 stetig ist.
• In Abwesenheit von Flächenstromdichten auf ∂ V gilt ∇
Die Stetigkeit von H1 lässt sich ähnlicherweise mit einer Fläche S in der (~e1 ,~e3 )-Ebene zeigen,
~ k stetig an der Oberfläche.
d.h. insgesamt ist die Tangentialkomponente H
~ r) = δ(x3 )J (x1 , x2 )~e1 , dann ist die Komponente
• Wenn es eine Flächenstromdichte gibt, z.B. J(~
~ k senkrecht zu dieser Stromdichte (hier H2 ) nicht stetig: [[H2 ]] = −J , während die
von H
Komponente längs der Stromdichte (hier H1 ) stetig ist.
Diese Randbedingungen können zusammengefasst werden als
~ r) = J~ (~r) in einem Punkt ~r der Oberfläche,
~ r) = 0 und ~en (~r) × H(~
~en (~r) · B(~
(X.24)
mit J~ der Flächenstromdichte und ~en dem Normaleinheitsvektor zur Oberfläche des Körpers.
X.3.4 Modelle für die Magnetisierung
Die Lösung der Gleichungen (X.22) erfordert die Einführung einer zusätzlichen konstitutiven
Gleichung, die die magnetische Feldstärke mit der Magnetisierung verknüpft und letztendlich aus
einem Modell für die mikroskopische Physik im magnetisierten Körper hergeleitet werden soll.45
• In homogenen und isotropen linearen Medien ist in jedem Punkt die Magnetisierung proportional zur magnetischen Feldstärke
~ (~r) = χm H(~
~ r).
M
(X.25)
χm ist die (dimensionslose) magnetische Suszeptibilität des Mediums.46
Die Mehrheit der Substanzen sind diamagnetische Stoffe, in denen χm < 0 ist, d.h. die das
Magnetfeld aus deren Inneren zu verdrängen versuchen. Insbesondere stellen Supraleiter in
nicht zu starken magnetischen Feldern „perfekte Diamagnete“ mit χm = −1 dar, entsprechend
dem Meißner–Ochsenfeld-Effekt.
Umgekehrt werden Substanzen mit χm > 0 paramagnetisch genannt.
Aus der Relation (X.25) folgt
~ = µ0 H
~ +M
~ = (1 + χm )µ0 H
~ ≡ µr µ0 H,
~
B
(X.26)
mit µr der relativen magnetischen Permeabilität. µ ≡ µ0 µr ist die magnetische Permeabilität
des Materials.
In einem isotropen aber inhomogenen Medium wird die magnetische Suszeptibilität bzw. Permeabilität ortsabhängig.
44
Der Sprung [[ · ]] wird hier als Differenz aus dem Wert der physikalischen Größe außerhalb der Oberfläche minus
dem Wert im Inneren definiert.
45
S. Fußnote 40.
46
~ und
Aus historischen Gründen wird die magnetische Suszeptibilität als der Proportionalitätsfaktor zwischen M
~ definiert, statt als der Koeffizient der Proportionalität zwischen M
~ und B/µ
~ 0 , was analog zur definierenden
H
~ = χe 0 E
~ wäre.
Relation (X.19a) der elektrischen Suszeptibilität P
X. Elektrostatik und Magnetostatik in Materie
105
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
• In anisotropen linearen Medien ist die Magnetisierung bzw. die magnetische Flussdichte nicht
mehr proportional zur magnetischen Feldstärke, sondern wird gegeben durch eine Beziehung
~ =~
~ bzw. B
~ =~
~ mit ~~χm und ~~µ ≡ (~~1 + ~~χm )µ0 (symmetrischen) Tensoren 2.
~χm · H
~µ · H,
wie M
Stufe.
• Bei Ferromagneten — wie Eisen, Kobalt oder Nickel unter ihrer Curie-Temperatur — ist die
~ nicht null auch bei verschwindender magnetischer Feldstärke
„spontane“ Magnetisierung M
~ = ~0, entsprechend der Ausrichtung der mikroskopischen magnetischen Dipolen (d.h. in der
H
Tat der Elektronenspins, die parallel zu einander ausgerichtet sind).47
~ und H
~ ist nicht-linear und hängt tatsächlich
Der zugehörige Zusammenhang zwischen M
von der Geschichte des Ferromagnets ab (s. Feynman [5, 6] Kapitel 36-3 für eine qualitative
Diskussion dieser Hysterese).
Als Beispiel sei ein unendlich langer zylindrischer Körper K , beschrieben
durch die konstitutive Gleichung (X.26) mit konstanter magnetischer Permeabilität µ = µ0 µr .
~ ext. parallel zur
Außerhalb K ist Vakuum, mit einem magnetischen Feld B
~
~ ext. /µ0 .
Richtung von K , d.h. einer magnetischen Feldstärke Hext. = B
Es wird angenommen, dass es auf der Körperoberfläche keine Stromdichte
gibt.
~ ext.
B
6
~
B
Die Tangentialkomponente der magnetischen Feldstärke ist stetig, so dass im Inneren von K
~
~ ext. gilt. Daraus folgt B
~ = µH
~ = µr B
~ ext. , d.h. die magnetische Flussdichte ist unstetig an
H =H
der Körperoberfläche.
~
~ = µr − 1 B
~ ext. gegeben.
~ = B −H
Schließlich ist die Magnetisierung in K durch M
µ0
µ0
Literatur
• Feynman [5, 6], Kapitel 34 & 36
• Griffiths [7], Kapitel 6
• Jackson [8], Kapitel 5.8–5.11
• Landau–Lifschitz [4], Kapitel III § 21 & Kapitel IV § 29–30.
X.4 Energie von elektrisierter bzw. magnetisierter Materie
X.4.1 Elektrostatische Energie
Ein makroskopischer Körper sei in einem elektrostatischen Feld, das durch äußere Ladungen bzw.
geladene Leiter mit gegebenen Potentialen erzeugt. Diesen Quellen entspricht eine makroskopische
Ladungsdichte %ext. (~r).
Eine Variation δ%ext. (~r) der Letzteren führt zu einer Verschiebung der elektrostatischen Energie
Ee des Feldes
Z
δEe = Φ(~r)δ%ext. (~r) d3~r.
47
Bei ferrimagnetischen Materialen sind die mikroskopischen magnetischen Dipolen abwechselnd antiparallel und
parallel zueinander ausgerichtet. Die Existenz eines stärkeren Dipolmoments in einer Richtung als in der anderen
~ = ~0 wenn die Dipolmomente in den
führt dann zu einer nicht-verschwindenden Magnetisierung, im Gegensatz zu M
beiden Richtungen gleicher Stärke sind (Antiferromagnetismus).
X. Elektrostatik und Magnetostatik in Materie
106
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Dies stellt die nötige Arbeit dar, um im jeden Punkt die Ladung δ%ext. (~r) auf das Potential Φ(~r)
zu bringen. Unter Verwendung der Maxwell–Gauß-Gleichung (X.17d) lässt sich diese Variation umschreiben als
Z
Z n
3
o
~
~
~ · Φ(~r) δ D(~
~ r) − ∇Φ(~
~ r) · δ D(~
~ r) d3~r.
δEe = Φ(~r) δ ∇ · D(~r) d ~r =
∇
Die Divergenz im zweiten Integral gibt nach Anwendung des Integralsatzes von Gauß einen Oberflächenterm, der weggelassen wird, so dass
Z
~ r) · δ D(~
~ r) d3~r.
δEe = E(~
(X.27)
Damit ergibt sich die Variation der inneren Energie U eines elektrisierten Körpers bei endlicher
konstanter Temperatur T
Z
~ r) · δ D(~
~ r) d3~r,
(X.28a)
dU = T dS − P dV + µ dN + E(~
mit S der Entropie, V dem Volumen, P dem (konstanten) Druck, µ dem (konstanten) chemischen
Potential und N der Teilchenzahl des Körpers. Die Variation der freien Energie F = U − T S ist
Z
~ r) · δ D(~
~ r) d3~r.
dF = −S dT − P dV + µ dN + E(~
(X.28b)
~ die „natürBemerkung: Gleichungen (X.28a) bzw. (X.28b) bedeutet, dass S bzw. T , V , N und D
lichen“ Variablen für die innere bzw. freie Energie darstellen. Es gilt dann
1 ∂U
1 ∂F
~
E=
=
.
(X.28c)
~ S,V ,N
~ T,V ,N
V ∂D
V ∂D
X.4.2 Energie magnetisierter Materie
~ r)
Jetzt wird der Fall eines makroskopischen Körpers in einem stationären magnetischen Feld B(~
in Anwesenheit einer externen Stromdichte J~ext. (~r) untersucht.
~ übt keine Arbeit auf die Ladungen, die sich im Feld bewegen, aus. Andererseits induziert eine
B
Änderung des magnetischen Feldes — genau genommen, des Flusses des magnetischen Feldes —
~ Das Letztere übt dann eine Arbeit auf
laut dem Faraday-Induktionsgesetz ein elektrisches Feld E.
die externe Stromdichte aus, so dass die Felder insgesamt Energie verlieren.
~ geleisteten
Die Variation der Energie Eb der Felder wegen der in der Zeit δt durch das Feld E
Z
Arbeit ist
~ r) d3~r δt.
δEb = −
J~ext. (~r) · E(~
Mithilfe der stationären Maxwell–Ampère-Gleichung (X.22d) lässt sich diese Variation schreiben als
Z
Z n
o
3
3
~
~
~
~
~
~
~
~
~
δEb = −
∇ × H(~r) · E(~r) d ~r δt =
∇ · E(~r) × H(~r) − ∇ × E(~r) · H(~r) d ~r δt.
Für die Divergenz im zweiten Integral kann nochmals der Gauß-Integralsatz benutzt werden; der
resultierende Oberflächenterm ist dann vernachlässigbar. Andererseits gilt wegen der Maxwell–
~ × E(~
~ r) δt = −δ B(~
~ r), mit δ B(~
~ r) der Verschiebung des magnetischen Feldes.
Faraday-Gleichung48 ∇
Damit ergibt sich
Z
~ r) · δ B(~
~ r) d3~r.
δEb = H(~
(X.29)
48
Hier wird die gemittelte Version der mikroskopischen Maxwell–Faraday-Gleichung (IX.24c) schon benutzt, obwohl
sie nur im nächsten Kapitel diskutiert wird.
X. Elektrostatik und Magnetostatik in Materie
107
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Dementsprechend ist die Variation der inneren Energie U eines magnetisierten Körpers (Entropie
S, Volumen V , Druck P , Teilchenzahl N ) bei endlicher Temperatur
Z
~ r) · δ B(~
~ r) d3~r,
dU = T dS − P dV + µ dN + H(~
(X.30a)
und die Variation der freien Energie
dF = −S dT − P dV + µ dN +
Z
~ r) · δ B(~
~ r) d3~r.
H(~
Schließlich kann die magnetische Feldstärke hergeleitet werden aus
1 ∂F
~ = 1 ∂U
H
=
.
~ S,V ,N
~ T,V ,N
V ∂B
V ∂B
(X.30b)
(X.30c)
Bemerkung: Trotz der formalen Analogie der Formel (X.30a) mit Gl. (X.28a) bzw. (X.30b) mit
Gl. (X.28b) soll man berücksichtigen, dass die Felder in den Gleichungen nicht gut miteinander
übereinstimmen.
Literatur
• Landau–Lifschitz [4], Kapitel II § 10–11 & Kapitel IV § 31–32.
X. Elektrostatik und Magnetostatik in Materie
108
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
XI. Maxwell-Gleichungen in Materie
XI.1 Maxwell-Gleichungen
~ ~r), D(t,
~ ~r), B(t,
~ ~r) und H(t,
~ ~r)
Die Bewegungsgleichungen für die makroskopischen Felder E(t,
in Anwesenheit von äußeren Ladungs- und Stromdichte %ext. (t, ~r) und J~ext. (t, ~r) lassen sich durch
Mittelung der Maxwell-Gleichungen (IX.24) erhalten.
Für die Maxwell–Gauß- bzw. Maxwell–Thomson-Gleichung liefert diese Mittelung die makroskopische Gleichung (X.17d) bzw. (X.22a). Da die Maxwell–Faraday-Gleichung nicht von den externen
Quellen abhängt, lässt sie sich mithilfe der Definitionen (IX.25a)–(IX.25b) der makroskopischen
Felder einfach mitteln. Schließlich bleibt die Maxwell–Ampère-Gleichung, deren Mittelung im Fall
einer stationären Stromdichte zur Gl. (X.22d) führt. Wenn die Stromdichte nicht mehr konstant ist,
muss sie der Kontinuitätsgleichung genügen, d.h. deren Divergenz muss gleich minus der Zeitableitung der Ladungsdichte sein. Um diese Bedingung zu erfüllen, muss in der gemittelten Gleichung
~ ~r) ersetzt werden.
~e(t, ~r) durch D(t,
Somit lauten die Maxwell-Gleichungen in Materie49
~ · D(t,
~ ~r) = %ext. (t, ~r),
∇
~ · B(t,
~ ~r) = 0,
∇
(XI.1a)
(XI.1b)
~
~ × E(t,
~ ~r) + ∂ B (t, ~r) = ~0,
∇
∂t
~
∂
~ × H(t,
~ ~r) − D (t, ~r) = J~ext. (t, ~r).
∇
∂t
(XI.1c)
(XI.1d)
Die Summe der Zeitableitung von Gl. (XI.1a) und der Divergenz von Gl. (XI.1d) ist
~
∂%ext.
~ · J~ext. (t, ~r) = ∂ ∇
~ · D(t,
~ ~r) + ∇
~ · ∇
~ × H(t,
~ ~r) − ∂ D (t, ~r) = 0.
(t, ~r) + ∇
∂t
∂t
∂t
(XI.2)
Die elektrische Flussdichte und die magnetische Feldstärke sind gegeben durch
~ ~r) = 0 E(t,
~ ~r) + P~ (t, ~r) + · · ·
D(t,
~
~ ~r) = B(t, ~r) − M
~ (t, ~r) + · · ·
H(t,
µ0
(XI.3a)
(XI.3b)
Bemerkungen:
∗ Unter Berücksichtigung der zwei ersten Terme in den obigen Relationen lässt sich Gl. (XI.1d)
noch schreiben als
~
1 ∂E
∂ P~
~
~
~
~
~
∇ × B(t, ~r) − 2
(t, ~r) = µ0 Jext. (t, ~r) +
(t, ~r) + ∇ × M (t, ~r) .
(XI.4)
c ∂t
∂t
Der zweite bzw. dritte Term in den eckigen Klammern wird manchmal als „Polarisations-“ bzw.
„Magnetisierungsstromdichte“ bezeichnet.
∗ Man prüft einfach, dass die Herleitung des Abschnitts X.2.1, insbesondere die effektive Ladungsdichte (X.16), im zeitabhängigen Fall gültig bleibt. Daher kann P~ (t, ~r) noch als elektrisches Dipolmoment pro Volumeneinheit betrachtet werden.
49
Im Gauß’schen Einheitensystem lauten diese Gleichungen
~
~ ·D
~ = 4π%ext. ,
~ ×H
~ − 1 ∂ D = 4π J~ext. ,
∇
∇
c ∂t
c
XI. Maxwell-Gleichungen in Materie
~ ·B
~ = 0,
∇
~
~ ×E
~ + 1 ∂ B = ~0.
∇
c ∂t
109
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Andererseits wird die effektive Stromdichte (X.20) im zeitabhängigen Fall geändert, wie an der
Gl. (XI.4) deutlich ist, wegen des Beitrags der zeitlichen Änderung vom elektrischen Dipolmoment
~ (t, ~r) nicht mehr als das magnetische
zum magnetischen Dipolmoment. Dementsprechend kann M
Dipolmoment pro Volumeneinheit interpretiert werden, sofern die Polarisationsstromdichte gegen
die Magnetisierungsstromdichte nicht vernachlässigbar ist.
Schließlich müssen die schon in Kapitel X hergeleiteten Randbedingungen an der Grenzoberfläche
zwischen Medien A und B gelten (~nAB ist der von A nach B gerichtete Normaleinheitsvektor):
DB,⊥ − DA,⊥ = σ,
(XI.5a)
BB,⊥ − BA,⊥ = 0,
~ B,k − E
~ A,k = ~0,
E
~ B,k − H
~ A,k = J~ × ~nAB ,
H
(XI.5b)
(XI.5c)
(XI.5d)
wobei die Komponente mit dem Index ⊥ bzw. k die Normal- bzw. Tangentialkomponente eines
Feldes bezeichnet und σ bzw. J~ eine Flächenladungsdichte bzw. -stromdichte ist.
~ bzw. D
~ in Gl. (XI.1c)–(XI.1d) spielen keine Rolle für die
Bemerkung: Die Zeitableitungen von B
Randbedingungen.
Der entsprechende Fluss durch die Fläche S in der Herleitung der Bedingung ist tatsächlich
proportional zur Länge δ und damit null im Limes δ → 0.
Literatur
• Feynman [5, 6], Kapitel 32-1–32-2
• Griffiths [7], Kapitel 7.3.5 & 7.3.6
• Jackson [8], Kapitel 6.6
• Landau–Lifschitz [4], Kapitel IX § 75.
XI.2 Poynting-Vektor. Energiebilanz
Die Differenz aus dem Produkt der makroskopischen Maxwell–Faraday-Gleichung (XI.1c) mit
~ ~r) minus dem Produkt von E(t,
~ ~r) mit der Maxwell–Ampère-Gleichung (XI.1d) gibt (der Kürze
H(t,
halber wird die (t, ~r)-Abhängigkeit der Felder nicht geschrieben)
~
~
~ · ∇
~ ×E
~ −E
~· ∇
~ ×H
~ +E
~ · ∂D + H
~ · ∂ B = −J~ext. · E.
~
H
∂t
∂t
~ · E
~ ×H
~ =∇
~ ·S
~ mit
Die zwei ersten Terme der linken Seite sind genau gleich ∇
~≡E
~ × H,
~
S
(XI.6)
(XI.7)
dem Poynting-Vektor , d.h. der Energiestromdichte.
Dann ist der Term auf der rechten Seite gleich minus der Leistung der Lorentz-Kraft auf die
externen Ladungen, entsprechend dem Negativen der Rate ∂eM /∂t der Änderung der kinetischen
Energie dieser Ladungen. Wenn die zwei letzten Terme auf der linken Seite der Gl. (XI.6) sich als
eine Zeitableitung ∂eF /∂t schreiben lassen, dann gilt50
∂eF ∂eM ~ ~
+
+ ∇ · S = 0,
∂t
∂t
entsprechend der Form eines Erhaltungssatzes.
50
(XI.8)
Die Indizes M und F stehen jeweils für Materie — die äußeren Ladungen — und Felder.
XI. Maxwell-Gleichungen in Materie
110
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
~ · δD
~ +H
~ · δB
~ im stationären Limes die Änderung der
Laut Gl. (X.27) und (X.29) stellt deF = E
Energiedichte der Felder dar. Damit könnte Gl. (XI.8) als eine Energiebilanz interpretiert werden.
Diese Deutung gilt aber nur für nichtdispersive lineare Medien, d.h. lineare Medien, deren Eigenschaften unabhängig von der Frequenz der Felder sind:
~ ~r) = ~
~ ~r),
~(~r) · E(t,
D(t,
~ ~r) = ~~µ(~r) · H(t,
~ ~r).
B(t,
(XI.9)
Mit solchen konstitutiven Gleichungen ist
3
3 X
~
~
∂Ej
∂Hj
∂D
∂B
∂ X 1
~
~
E·
+H ·
=
Ei ij
+ Hi µij
=
Ei ij Ej + Hi µij Hj
∂t
∂t
∂t
∂t
∂t
2
i,j=1
i,j=1
~ ~
~ ·B
~
∂ E
·D+H
=
,
∂t
2
d.h. man kann in diesem Fall eine Energiedichte der Felder
eF (t, ~r) =
1 ~
~ ~r) + H(t,
~ ~r) · B(t,
~ ~r)
E(t, ~r) · D(t,
2
identifizieren, mit der die Relation (XI.8) eine Energiebilanz darstellt.
Literatur
• Landau–Lifschitz [4], Kapitel IX § 75
• Schwinger [10], Kapitel 7.1.
XI. Maxwell-Gleichungen in Materie
111
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
XII. Elektromagnetische Wellen in Materie
Unten den wichtigsten Lösungen der makroskopischen Maxwell-Gleichungen (XI.1) in Materie sind
die (fortschreitenden) Wellen. Um die zugehörigen Wellengleichungen zu erhalten, sind konstitutive
~ und D
~ bzw. B
~ und H
~ nötig. Hiernach wird angenommen, dass die Felder
Gleichungen zwischen E
in homogenen und linearen Materialen propagieren — wobei die konstitutiven Relationen zeitunabhängig oder -abhängig sein können — und dass keine externen Ladungen vorhanden sind, d.h.
%ext = 0, J~ext = ~0.
Zunächst wird der Fall elektromagnetischer Wellen mit „langsamer“ Frequenz untersucht, die
sehr ähnlich Wellen im Vakuum sind (Abschn. XII.1). Dann werden Wellen mit beliebig großer
Frequenz studiert (Abschnitt XII.2).
XII.1 Elektromagnetische Wellen im quasistationären Zustand
Sei eine monochromatische Welle, die auf einem makroskopischen Körper stößt. Die Zeitabhängigkeit des elektromagnetischen Feldes wird durch dessen Kreisfrequenz ω bzw. durch dessen
Periodendauer T = 2π/ω charakterisiert.
Diese Periode soll mit der typische Zeitskala τP~ bzw. τM
~ , auf der die Polarisation bzw. die
Magnetisierung des makroskopischen Körpers sich einstellen kann, verglichen werden. Ist die Peri−1
ode viel größer ist als jene typischen Zeitskalen, d.h. ω τ −1
~ , τM
~ , so können die Eigenschaften
P
(Permittivität, Permeabilität...) des Materials über eine Periode als konstant betrachtet werden.
Für ein isotropes lineares und homogenes Medium gelten also
~
~ ~r) = E(t,
~ ~r), H(t,
~ ~r) = B(t, ~r) ,
D(t,
(XII.1)
µ
mit = 0 r und µ = µ0 µr .
XII.1.1 Wellengleichung
~ · E(t,
~ ~r) = 0. Bildet
Unter diesen Bedingungen führt die Maxwell–Gauß-Gleichung (XI.1a) zu ∇
~
~
~
~ ∇
~ · E)
~ − 4E,
~
man die Rotation der Gl. (XI.1c) unter Verwendung der Identität ∇ × (∇ × E) = ∇(
so kommt
~ ~r) + ∂ ∇
~ × B(t,
~ ~r) = ~0.
−4E(t,
∂t
~ × B(t,
~ ~r) durch µ∇
~ × H(t,
~ ~r) ersetzt werden: die
Dank der konstitutiven Relation (XII.1) kann ∇
Maxwell–Ampère-Gleichung (XI.1d) gibt dann die Beziehung
~
~
~ × B(t,
~ ~r) = µ ∂ D(t, ~r) = µ ∂ E(t, ~r) .
∇
∂t
∂t
Somit ergibt sich
µ
~ ~r)
∂ 2 E(t,
~ ~r) = ~0.
− 4E(t,
∂t2
(XII.2a)
Auf die gleiche Weise findet man ausgehend von der Rotation von Gl. (XI.1d)
µ
~
∂2B
~ ~r) = ~0.
(t, ~r) − 4B(t,
2
∂t
(XII.2b)
Diese Bewegungsgleichungen sind homogene Wellengleichungen. In Analogie mit bekannten Ergebnis lautet die Phasengeschwindigkeit der Wellen
ceff = √
XII. Elektromagnetische Wellen in Materie
c
1
=√ .
r µr
µ
(XII.2c)
112
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
ceff stellt die „effektive“ Lichtgeschwindigkeit in Materie dar.51
~ und H
~ genügen analogen Bewegungsgleichungen und propagieren mit
Bemerkung: Die Felder D
derselben Phasengeschwindigkeit ceff .
XII.1.2 Ebene elektromagnetische Wellen in Materie
Die Wellengleichungen (XII.2a)–(XII.2b) sind ähnlich der entsprechenden Gleichungen für elektromagnetische Wellen im Vakuum, mit c ersetzt durch ceff , Gl. (XII.2c).
Mögliche Lösungen der Wellengleichung (XII.2) sind die ebenen monochromatischen Wellen
~ ~r) = E
~ 0 ei(~k·~r−ωt) ,
E(t,
~ ~r) = B
~ 0 ei(~k·~r−ωt) ,
B(t,
mit beliebiger Kreisfrequenz ω, einem Wellenvektor ~k(ω), dessen Betrag der Bedingung
√
ω r µr
ω
~
k(ω) ≡ k(ω) =
=
ceff
c
~ 0 , und
genügt, beliebiger Amplitude E
~0
~e × E
~ 0 = ~k
,
B
ceff
mit ~e~ dem Einheitsvektor in die Propagationsrichtung, d.h. die Richtung von ~k.
(XII.3a)
(XII.3b)
(XII.3c)
k
XII.1.3 Reflexions- und Brechungsgesetz
Seien zwei homogene dielektrische Medien A , B mit den jeweiligen relativen Permittivitäten und
Permeabilitäten r,A , r,B und µr,A , µr,B und einer gemeinsamen ebenen Grenzfläche S, auf der es
keine frei bewegliche Ladungsträger bzw. keine Flächenstromdichte gibt.
Eine elektromagnetische Welle mit Kreisfrequenz ω und Wellenvektor ~kA läuft im Medium A
auf die Grenzfläche ein:
~ A (t, ~r) = E
~ A,0 ei(~kA ·~r−ωt) , B
~ A (t, ~r) = B
~ A,0 ei(~kA ·~r−ωt) .
E
Dann läuft sie im Medium B weiter, mit der gleichen Frequenz und dem Wellenvektor ~kB :
~ B (t, ~r) = E
~ B,0 ei(~kB ·~r−ωt) ,
E
~ B (t, ~r) = B
~ B,0 ei(~kB ·~r−ωt) .
B
~B, B
~ B ) ist die transmittierte Welle.
(E
Es wird angenommen, dass ω klein genug ist, als dass in jedem Medium die konstitutiven Gleichungen (XII.1) gelten:
~
~ A (t, ~r) = r,A 0 E
~ A (t, ~r), H
~ A (t, ~r) = BA (t, ~r) ,
D
µr,A µ0
und ähnliche Beziehungen für die Felder im Medium B . Dann gelten auch in jedem Medium die
Relationen (XII.3b)–(XII.3c) mit der jeweiligen effektiven Lichtgeschwindigkeit (XII.2c).
An der Grenzfläche sollen die Bedingungen (XI.5) mit σ = 0, J~ = ~0 erfüllt werden. Das ist mit
~A, B
~A, E
~B, B
~ B allein nicht möglich.
den Feldern E
~A,
Dies lässt am einfachsten für den Fall einer senkrecht einfallenden Welle prüfen. Dann sind E
~
BA an der Grenzfläche tangential. Laut den Bedingungen (XI.5a) und (XI.5b) (Stetigkeit der
~ B und B
~ B ebenfalls tangential sein. Die Stetigkeit der TangentialNormalkomponenten) sollen E
~ B |/µr,B = |B
~ A |/µr,A , d.h. unter Nutzung
komponente der magnetischen Feldstärke führt zu |B
der Gl. (XII.3c)
r r,B
r r,A
~B
~A
E
= E
,
µr,B
µr,A
~ B | = |E
~ A | [Bedingung (XI.5c)]
was sich im allgemeinen Fall nicht in Übereinstimmung mit |E
bringen lässt.
51
Für die Bedeutung dieser effektiven Lichtgeschwindigkeit in einem Medium, s. Feynmans Diskussion in Ref. [11, 12]
Kapitel 31.
XII. Elektromagnetische Wellen in Materie
113
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
medium A
medium B
J
J
J
0
J
^ θA θA ~en
J
6
J J
B
B
BNB
B
θB B
B
B
S
Abbildung XII.1: Reflexion und Brechung einer Welle auf eine ebene Grenzfläche.
Somit muss es eine dritte Welle geben, die reflektierte Welle, im Medium A :
~ 0 (t, ~r) = E
~ 0 ei(~kA0 ·~r−ωt) ,
E
A
A,0
~ 0 (t, ~r) = B
~ 0 ei(~kA0 ·~r−ωt) ,
B
A
A,0
mit |~kA0 | = |~kA |.
Sei ~en der Normaleinheitsvektor zur Grenzfläche S. Die Grenzbedingung (XI.5b) in einem Punkt
~ A (t, ~r) + B
~ 0 (t, ~r)] = ~en · B
~ B (t, ~r), d.h.
~r von S lautet jetzt ~en · [B
A
i
h
0
i(~kA0 −~kA )·~
r
~
~
~ B,0 (t, ~r) ei(~kB −~kA )·~r .
= ~en · B
~en · BA,0 (t, ~r) + BA,0 (t, ~r) e
Die Phasenfaktoren in dieser Gleichheit dürfen nicht vom Punkt abhängen: (~kA0 − ~kA ) · ~r = 0 und
(~kB − ~kA ) · ~r = 0 für jeden ~r ∈ S. Das heißt zum einen, dass ~kA0 − ~kA kollinear zu ~en ist, entsprechend
dem Reflexionsgesetz
~kA , ~k 0 und ~en sind koplanar;
A
(XII.4)
θA0 = θA ,
mit θA dem Einfallswinkel und θA0 dem Reflexionswinkel (Abb. XII.1).
Zum anderen ist ~kB − ~kA ebenfalls senkrecht zu S. Unter Berücksichtigung der unterschiedlichen
Phasengeschwindigkeiten des Lichts in den beiden Medien erhält man das Brechungsgesetz
~kA , ~kB und ~en sind koplanar;
√
√
r,A µr,A sin θA = r,B µr,B sin θB ,
(XII.5)
mit θB dem Brechungsswinkel (Abb. XII.1).
XII.2 Elektromagnetische Wellen beliebiger Kreisfrequenz
Wenn die Periode des elektromagnetischen Feldes nicht viel größer als die Zeitskala τP~ ist, kann
die dielektrische Polarisation bzw. die elektrische Flussdichte den Änderungen der elektrischen Feldstärke nicht unverzögert folgen, sondern hängt auch von deren Werten zu vergangenen Zeitpunkten
ab. Somit führt man eine (tensorielle) Funktion ~~χe (t, t0 ) ein, welche die „Antwort“ zur Zeit zu einer
elektrischen Anregung zur Zeit t0 ≤ t beschreibt:
Z t
~~χe (t, t0 ) · 0 E(t
~
~ 0 , ~r) dt0 .
P (t, ~r) =
(XII.6)
−∞
[vgl. Gl. (X.19a)].
~χe nicht von t und t0 getrennt abhängt, sondern nur von der
Eine günstige Annahme ist, dass ~
Verzögerung t − t0 . Dies ist äquivalent zur Forderung, dass Gl. (XII.6) gültig bleibt, wenn alle Zeiten
XII. Elektromagnetische Wellen in Materie
114
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
um einen beliebigen τ0 verschoben werden — d.h. dass die Physik invariant unter Zeittranslation
ist. In diesem Fall lässt sich die Beziehung noch schreiben als
Z ∞
~~χe (τ ) · 0 E(t
~ − τ, ~r) dτ.
~
(XII.7a)
P (t, ~r) =
0
Wiederum ist die elektrische Flussdichte gegeben durch
Z ∞
~~χe (τ ) · 0 E(t
~ − τ, ~r) dτ.
~ ~r) = 0 E(t,
~ ~r) +
D(t,
(XII.7b)
0
~χe (τ ) heißt elektrischer Suszeptibilitätstensor.
Der Tensor zweiter Stufe ~
Bemerkung: In den Relationen (XII.7) wird die Kausalität berücksichtigt, indem die Integrale nur
über positive Werte der Zeitverzögerung τ laufen.
XII.2.1 Dielektrischer Tensor, dielektrische Funktion
Die Beziehungen (XII.7) sind
lassen sich einfachere Gleichungen
Z ∞
˜
~
~ ~r) eiωt dt,
E(ω, ~r) =
E(t,
nicht-lokal in der Zeit. Durch zeitliche Fourier-Transformation
erhalten. Es seien
Z ∞
Z ∞
˜
˜
iωt
~
~ ~r) eiωt dt
~
~
D(ω, ~r) =
D(t,
P (ω, ~r) =
P (t, ~r) e dt,
−∞
−∞
−∞
~ ~r), P~ (t, ~r) und D(t,
~ ~r). Aus Gl. (XII.7) und dem
die jeweiligen Fourier-Transformierten von E(t,
Faltungsstheorem folgen die Beziehungen
Z ∞ Z ∞
Z ∞
Z ∞
˜
iωt
iωτ ~
~
~
~
~ − τ, ~r) eiω(t−τ ) dt
~χe (τ ) · 0 E(t − τ, ~r) dτ e dt =
P (ω, ~r) =
dτ e ~χe (τ ) ·
0 E(t
−∞
0
0
~˜ ~r),
= ~~χe (ω) · 0 E(ω,
−∞
(XII.8a)
~˜ ~r),
~˜ ~r) = ~~(ω) · E(ω,
~˜ ~r) = 0 E(ω,
~˜ ~r) + ~
~χe (ω) · 0 E(ω,
D(ω,
(XII.8b)
mit ~~χe (ω) dem Fourier-transformierten Tensor von ~~χe (τ ) Θ(τ ) und ~~(ω) ≡ ~~1 +~~χe (ω) 0 ≡ ~~r (ω) 0 ,
wobei ~~1 den Einheitstensor 2. Stufe bezeichnet und Θ(τ ) die Heaviside-Funktion. ~~(ω) ist der
dielektrische Tensor im Fourier-Raum.
Wenn das Material isotrop ist, dann sind der Suszeptibilitätstensor und der dielektrische Tensor
diagonal und können damit durch skalare Funktionen χe (ω) und (ω) ersetzt werden. Die Letztere
wird dielektrische Funktion genannt.
Bemerkungen:
∗ Für kleine Kreisfrequenzen lautet die Fourier-Transformierte der ersten Relation in Gl. (XII.1)
~˜ ~r),
~˜ ~r) = E(ω,
D(ω,
mit der (frequenzunabhängigen) Permittivität. Der Vergleich mit Gl. (XII.8b) gibt = (ω = 0).
Deshalb wurde die Permittivität früher dielektrische Konstante genannt.
∗ Für große Frequenzen oszilliert das elektrische Feld so schnell, dass die mikroskopischen Prozesse,
~ 6= 0 E
~ führen,
die zur Entstehung einer Polarisation und dadurch einer elektrischen Flussdichte D
~
nicht mithalten können. Dann muss lim ~~(ω) = 0~1 gelten.
ω→∞
Genauer gesagt muss die Kreisfrequenz ω viel größer als die charakteristischen Kreisfrequenzen
ωa der Bewegungen der Ladungsträger im Material sein.
Andererseits muss man berücksichtigen, dass im Limes ω → ∞ die makroskopische Beschreibung
sinnlos wird. In diesem Limes wird die Wellenlänge λ = 2πc/ω des Felds im Vakuum tatsächlich sehr klein: wenn λ der Ordnung der atomaren Skala oder gar kleiner ist, wird das Material
durch das Feld nicht mehr als ein kontinuierliches Medium mit langsam variierenden Eigenschaften „gesehen“: die effektive Theorie ist nicht mehr gültig. Man sollte dann eine mikroskopische
Beschreibung benutzen.
XII. Elektromagnetische Wellen in Materie
115
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
~ = (~~1 + ~~χe )0 [Gl. (X.19b)] zum nicht-stationären Fall
∗ Die Verallgemeinerung der Beziehung ~
ist direkt im Frequenz-Raum, nicht im τ -Raum. Für die zeitabhängigen Größen gilt tatsächlich
~~(τ ) = [δ(τ ) ~~1 + ~
~χe (τ ) Θ(τ )] 0 , wie auf Gl. (XII.7b) zu sehen ist.
∗ Manchmal wird der Suszeptibilitätstensor als ~~χe (τ ) = ~~0 für τ < 0 definiert. Dann kann man −∞
als untere Grenze der Integrale in Gl. (XII.7) nehmen, und ~~χe (ω) als Fourier-Transformierte von
~~χe (τ ) (ohne die Heaviside-Funktion) betrachten.
∗ Für ein nicht-homogenes Medium hängen elektrischer Suszeptibilitätstensor und dielektrischer
Tensor auch vom Ort ab. Damit soll der nicht-lokale Zusammenhang zwischen Polarisation bzw.
elektrische Flussdichte und elektrischer Feldstärke diese Abhängigkeit in Betracht ziehen: beispielsweise gilt
Z ∞ Z
~ ~~χe (τ, X)
~ · 0 E(t
~ − τ, ~r − X).
~
~
dτ dX
P (t, ~r) =
0
Lokale Relationen ergeben sich dann durch zeitliche und räumliche Fourier-Transformationen, wie
˜
~˜ ~k).
~χe (ω, ~k) · 0 E(ω,
z.B. P~ (ω, ~k) = ~
XII.2.2 Mathematische Eigenschaften der elektrischen Suszeptibilität
Allgemein ist die (Fourier-transformierte) elektrische Suszeptibilität χe (ω) eine komplexwertige
~ ~r)
Funktion χe (ω) = Re χe (ω) + i Im χe (ω).52 Diese Funktion hat wegen der Reellwertigkeit von E(t,
und P~ (t, ~r) und der Kausalitätsbedingung in Gl. (XII.7) besondere mathematische Eigenschaften,
unabhängig von irgendeinem unterliegenden mikroskopischen Modell. Analoge Eigenschaften gelten
für die komplexwertige dielektrische Funktion (ω).53
~ ~r) und P~ (t, ~r) nehmen reelle Werte an, so dass
Die physikalischen Felder E(t,
Z ∞
Z ∞
∗
~˜
~˜ ~r)∗ =
~ ~r)∗ e−iω∗ t dt =
~ ~r) e−iω∗ t dt = E(−ω
, ~r),
E(ω,
E(t,
E(t,
−∞
−∞
˜
˜
wobei ω momentan als komplex angenommen wurde, sowie P~ (ω, ~r) = P~ (−ω ∗ , ~r). Daher gilt auch
χe (ω)∗ = χe (−ω ∗ ),
(
d.h. für ω ∈ R
(XII.9)
Re χe (−ω) = Re χe (ω) :
Re χe (ω) ist gerade;
Im χe (−ω) = −Im χe (ω) : Im χe (ω) ist ungerade.
Die elektrische Suszeptibilität lässt sich also als
1
1
1
χe (ω) = χe (ω) + χe (−ω ∗ )∗ + χe (ω) − χe (−ω ∗ )∗ = χe (ω) + χe (−ω ∗ )∗ ,
2
2
2
schreiben, wobei der zweite Term im zweiten Glied wegen der Eigenschaft (XII.9) null ist.
Definitionsgemäß ist χe (ω) die Fourier-Transformierte von χe (τ ) Θ(τ ). Die entsprechende inverse
Fourier-Transformation lautet
Z ∞
dω
.
χe (τ ) Θ(τ ) =
e−iωτ χe (ω)
2π
−∞
Das Integral im rechten Glied kann als Teil eines Linienintegrals über eine geschlossene Kontour
in der komplexen ω Ebene, bestehend aus der reellen Achse und einem Halbkreis im Unendlichen,
betrachtet werden. Da die Funktion auf der linken Seite null für τ < 0 ist, bedeutet das, dass die
Polstellen des Integranden nicht in der oberen Halbebene sind, sondern in der unteren Halbebene,
d.h. bei ω = ω0 − iγ mit ω0 ∈ R, γ ∈ R+ .
52
53
~χe (ω).
Die Betrachtungen dieses Paragrafs gelten auch für den elektrischen Suszeptibilitätstensor ~
Für weitere Details zu diesen mathematischen Eigenschaften, s. Kapitel 1 in Ref. [13].
XII. Elektromagnetische Wellen in Materie
116
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
Unter Berücksichtigung der Paritätseigenschaft (XII.9) ist dann ω = −ω0 − iγ auch ein Pol mit
demselben Residuum. Dementsprechend lautet ein guter Ansatz für die elektrische Suszeptibilität
c0
1
c0 ω0
Ω2a
1
χe (ω) =
= 2
=
,
+
2 ω0 − ω − iγ ω0 + ω + iγ
ωa2 − ω 2 − iωΓa
ω0 + γ 2 − ω 2 − 2iγω
mit ω0 ∈ R, γ ∈ R+ und c0 einer reellen Konstante sowie Ω2a ≡ c0 ω0 , ωa2 ≡ ω02 + γ 2 und Γa ≡ 2γ.
Laut dem Lorentz–Drude-Modell (vgl. Anhang XII.A.2) ist χe (ω) genau eine Summe von Termen
dieser Art:
X
Ω2a
,
(XII.10)
χe (ω) =
ωa2 − ω 2 − iωΓa
a
mit ωa der Eigenkreisfrequenz der gedämpften harmonischen Bewegung eines gebundenen Ladungsträgers (vom Typ a) des Materials, mit ω1 < ω2 < · · · , und Γa der entsprechenden Dämpfungskonstante.
Bemerkungen:
∗ Abbildung XII.2 stellt den Imaginärteil der elektrischen Suszeptibilität
X
Ω2a Γa ω
Im χe (ω) =
(ωa2 − ω 2 )2 + ω 2 Γ2a
a
dar. Bei jeder Eigenkreisfrequenz ωa tritt eine „Resonanz“ mit der Breite Γa auf, so dass dieser
Imaginärteil wie ein optisches Spektrum aussieht: man spricht von der Spektralfunktion.
Im χe (ω)
−ω2
−ω1
ω1
ω2
ω
Abbildung XII.2: Imaginärteil der elektrischen Suszeptibilität (XII.10).
∗ Der Kehrwert ωa−1 der Eigenkreisfrequenz stellt die typische Zeitdauer für die Bewegung des
Ladungsträgers dar, d.h. die charakteristische Zeitskala für die Einstellung der mikroskopischen
Polarisation. Dann ist Γ−1
a ein Maß der typischen Zeitskala für die Dämpfung dieser Bewegung, d.h.
für das Verschwinden der Polarisation. Damit eine endliche Polarisation sich einstellen kann, soll
also Γa ωa gelten.
Ist diese Bedingung für den langsamsten Schwingungsmodus ω1 erfüllt, so lautet die Bedingung für
die Gültigkeit der in Abschn. XII.1 gemachten quasistationären Näherung ω ω1 . Die elektrische
Suszeptibilität (XII.10) bzw. die entsprechende dielektrische Funktion ist tatsächlich näherungsweise
konstant für ω ω1 :
X Ω2
X Ω2 a
a
χe (ω) ∼
,
(ω) ∼ 1 +
0 ,
2
2
ωω1
ωω1
ω
ω
a
a
a
a
unabhängig von der Kreisfrequenz und größer als 0 .
XII. Elektromagnetische Wellen in Materie
117
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
∗ Für hohe Frequenzen,d.h. ωP
viel größer
2 als die höchste Eigenkreisfrequenz, liefert das Lorentz–
2
Drude-Modell (ω) = 0 1 −
a Ωa /ω : wie erwartet geht die dielektrische Funktion nach 0
wenn ω → ∞.
Kramers–Kronig-Beziehungen
Schließlich sind Real- und Imaginärteil der elektrischen Suszeptibilität miteinander verknüpft über
die Beziehungen
Z ∞
1
Im χe (ω 0 ) 0
Re χe (ω) = P
dω ,
0
π
−∞ ω − ω
Z ∞
(XII.11)
Re χe (ω 0 ) 0
1
Im χe (ω) = − P
dω ,
0
π
−∞ ω − ω
::::::::::::::::::::::::::::
wobei P den Cauchy-Hauptwert bezeichnet.54
Die Funktion χe (ω 0 ) der komplexen Variable ω 0 hat keine Polstelle in der oberen Halbebene;
dazu strebt sie nach Null wenn |ω 0 | → ∞. Somit hat die Funktion χe (ω 0 )/(ω 0 − ω) nur eine
Polstelle in der oberen Halbebene, und zwar bei ω 0 = ω. Daher ist das Integral
I
χe (ω 0 )
I = dω 0 0
ω −ω
entlang der in Abb. XII.3 dargestellten Kontour wegen des Residuensatzes null. Der Beitrag des
Im ω 0
C1
C2
•
ω
Re ω 0
Abbildung XII.3: Kontour zum Beweis der Kramers–Kronig-Beziehungen.
Halbkreises C1 verschwindet im Limes eines unendlich großen Radius dank dem Verhalten von
χe (ω 0 ) für |ω 0 | → ∞. Sei δ der Radius des Halbkreises C2 . Der Beitrag der reellen Achse zum
Integral I im Limes δ → 0 ist genau gleich dem Cauchy-Hauptwert
Z ∞
χe (ω 0 )
P
dω 0 .
0−ω
ω
−∞
Schließlich gibt das Integral entlang des Halbkreises C2 im gleichen Limes
Z
χe (ω 0 )
lim
dω 0 = −iπχe (ω),
δ→0 C ω 0 − ω
2
wobei der Residuensatz benutzt wurde. Somit gilt
Z ∞
χe (ω 0 )
I =P
dω 0 0
− iπχe (ω) = 0,
ω −ω
−∞
woraus die Beziehungen (XII.11) sofort folgen.
Ein alternativer „einfacher“ Beweis der Beziehungen wird in Ref. [14] dargelegt.
54
Für eine Funktion f (x), deren Integral über [a, b] uneigentlich am Punkt c ∈]a, b[ ist, ist
Z c−ε
Z b
Z b
P
f (x) dx = lim
f (x) dx +
f (x) dx .
a
ε→0+
XII. Elektromagnetische Wellen in Materie
a
c+ε
118
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Bemerkung: Die elektrische Suszeptibilität stellt ein Beispiel von linearer Antwortfunktion dar,
d.h. von der Abhängigkeit, welche die Reaktion eines Systems zu einer kleinen Anregung beschreibt.
Solche Prozesse sind immer kausal — die Reaktion kommt nach der Anregung —, so dass die hier
dargelegten analytischen Eigenschaften von χe (ω) (Polstellen, Verhalten für |ω| → ∞) auch für
andere Antwortfunktionen gelten, sowie zugehörige Kramers–Kronig-Beziehungen.
XII.2.3 Beispiel: elektrischer Leiter
In einem elektrischen Leiter sind frei bewegliche Ladungsträger vorhanden. Denen entspricht
in der elektrischen Suszeptibilität (XII.10) eine Eigenkreisfrequenz ω1 = 0, während die weiteren
Eigenkreisfrequenzen ωa>1 endlich bleiben.55 Für kleine Eigenkreisfrequenzen gilt also
X Ω2
Ω21
a
χe (ω) ∼ −
+
(XII.12a)
ω→0
ω(ω + iΓ1 )
ωa2
a>1
d.h. für die relative dielektrische Funktion
X Ω2
Ω21
iΩ21
a
−
≡ r,0 +
.
r (ω) = 1 + χe (ω) ∼ 1 +
2
ω→0
ωa
ω(ω + iΓ1 )
ω(Γ1 − iω)
(XII.12b)
a>1
Somit divergiert die dielektrische Funktion (ω) im Limes ω → 0 für einen elektrischen Leiter, wie
am Ende des Abschnitts X.2.4 schon argumentiert wurde.
Bemerkung: Für r → ∞ wird die effektive Lichtgeschwindigkeit (XII.2c) null: elektromagnetische
Wellen können in einem elektrischen Leiter im quasistationären Limes nicht propagieren. Diese
Tatsache liegt den optischen Eigenschaften von Metallen zugrunde, insbesondere dem metallischen
Aussehen, das durch die Totalreflexion von einfallenden Wellen im optischen Bereich verursacht
wird.
In Fourier-Darstellung lautet die Maxwell–Ampère-Gleichung (XI.1d)
~ × H(ω,
~˜
~˜ ~r) = J~˜ext. (ω, ~r).
∇
~r) + iω D(ω,
Durch Einsetzen der elektrischen Flussdichte (XII.8b) mit der dielektrischen Funktion (XII.12b)
wird dies zu
2
~ × H(ω,
~˜
~˜ ~r) ' J~˜ext. (ω, ~r) + Ω1 0 E(ω,
~˜ ~r).
∇
~r) + iωr,0 0 E(ω,
ω→0
Γ1 − iω
Die Identifizierung des zweiten Terms auf der rechten Seite mit einer „induzierten“ Stromdichte führt
zum Ohm-Gesetz
Ω21
˜
~˜ ~r)
J~ind. (ω, ~r) = σ(ω) E(ω,
mit
σ(ω) ≡
0
Γ1 − iω
der elektrischen Leitfähigkeit. Eine solche Form der Leitfähigkeit lässt sich im Rahmen des DrudeModells [vgl. Anhang XII.A.1, Gl. (XII.34)] herleiten.
Bemerkung: Der Unterschied zwischen Leiter und Nichtleiter bezüglich der Ausbreitung von Wellen ist nur bei kleinen Frequenzen bedeutend, wo das Verhalten der dielektrischen Funktion für
ω → 0 noch „spürbar“ ist. Der Unterschied verschwindet bei höheren Frequenzen.
XII.2.4 Dispersion und Absorption
Der Einfachheit halber wird im Weiteren nur der Fall eines homogenen isotropen Mediums
diskutiert. Dieses wird durch eine dielektrische Funktion (ω) charakterisiert, sowie durch eine frequenzabhängige Permeabilität µ(ω).56
55
Im Lorentz–Drude-Modell unterliegen die freien Ladungsträger keiner harmonischen Bindungskraft(!), d.h. die
Eigenkreisfrequenz des zugehörigen Oszillators ist null.
56
In den meisten Materialen ist die Abhängigkeit der Permeabilität nach ω tatsächlich vernachlässigbar in den
Bereichen, wo (ω) erheblich variiert, und umgekehrt.
XII. Elektromagnetische Wellen in Materie
119
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
XII.2.4
a Wellengleichung
:::::::::::::::::::::::::
Für die Fourier-transformierten Felder lauten die Maxwell-Gleichungen (XI.1) in Abwesenheit
von externen Ladungsträgern
~ · E(ω,
~˜ ~r) = 0,
∇
~ · H(ω,
~˜
∇
~r) = 0,
~ × E(ω,
~˜ ~r) − iωµ(ω)H(ω,
~˜
∇
~r) = ~0,
~ × H(ω,
~˜
~˜ ~r) = ~0,
∇
~r) + iω(ω)E(ω,
(XII.13a)
(XII.13b)
(XII.13c)
(XII.13d)
~˜ ~r) und B(ω,
~˜ ~r)
wobei die konstitutiven Gleichungen schon benutzt wurden, um die Flussdichten D(ω,
durch die Feldstärken zu ersetzen.
Die Summe von (ω) mal der Rotation der Gl. (XII.13c) und dem Produkt der Gl. (XII.13d)
mit iωµ(ω) gibt, unter Berücksichtigung der Gl. (XII.13a)
~˜ ~r) = ~0,
~˜ ~r) + ω 2 µ(ω)(ω)E(ω,
4E(ω,
(XII.14a)
~˜
während H(ω,
~r) einer analogen Gleichung genügt
~˜
~˜
~r) = ~0.
~r) + ω 2 µ(ω)(ω)H(ω,
4H(ω,
(XII.14b)
Eine solche partielle Differentialgleichung wird (homogene) Helmholtz-Gleichung genannt.
Der Brechungsindex (auch als Brechzahl bezeichnet) n(ω) ist definiert durch57
2
n(ω)2 = n0 (ω) + in00 (ω) = r (ω) µr (ω),
(XII.15)
mit n0 (ω), n00 (ω) reellwertigen Funktionen und r (ω) bzw. µr (ω) der relativen dielektrischen Funktion bzw. Permeabilität.
n00 (ω) heißt Extinktionskoeffizient und das Verhältnis κ(ω) = n00 (ω)/n0 (ω) Absorptionsindex.
Mit dem Brechungsindex lauten die Helmholtz-Gleichungen (XII.14)
2
2
~˜ ~r) + ω n(ω) E(ω,
~˜ ~r) = ~0,
4E(ω,
2
c
ω 2 n(ω)2 ~˜
~˜
4H(ω,
~r) +
H(ω, ~r) = ~0.
c2
(XII.16)
Bemerkung: Laut den Kramers–Kronig-Beziehungen (XII.11) darf der Brechungsindex nicht reell
oder rein imaginär über den ganzen Frequenzraum sein.
XII.2.4
b Lösung der Wellengleichung
:::::::::::::::::::::::::::::::::::::
Um diese linearen Differentialgleichungen zu lösen, wird der Ansatz
~˜ ~r) = E
~ 0 ei~k(ω)·~r = E
~ 0 ei~kr (ω)·~r e−~ki (ω)·~r
E(ω,
(XII.17)
~˜
und ein analoger Ansatz für H(ω,
~r) gemacht, mit einem komplexen frequenzabhängigen Wellen~
~
~
vektor k = kr + i ki .Mit diesem Ansatz lässt sich der Laplace-Operator durch −~k 2 ersetzen, so dass
die Gleichung (XII.16) eine Lösung nur dann haben kann, wenn die Bedingung
2
2
~k(ω)2 = ω n(ω)
c2
(XII.18)
erfüllt wird.
57
Manchmal wird nur der Realteil n0 (ω) als Brechungsindex bezeichnet.
XII. Elektromagnetische Wellen in Materie
120
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Bemerkungen:
∗ Diese Bedingung macht die Notwendigkeit eines komplexen Wellenvektors deutlich: ω und c sind
reelle Größen, so dass ein komplexer Index n(ω) von einem komplexen ~k(ω) begleitet werden muss.
∗ Wegen des Imaginärteils des Wellenvektors ist das Feld nicht periodisch im Raum. Somit stellt
der Ansatz (XII.17) keine ebene Welle dar.
Im Allgemeinen sind Real- und Imaginärteil des komplexen Wellenvektors nicht kollinear. Hiernach werden sie der Einfachheit halber als kollinear angenommen. Dann kann deren gemeinsame
Richtung als die Propagationsrichtung der Welle identifiziert werden.
Sei ~k0 (ω) ein reeller Vektor mit dem Betrag |~k0 (ω)| = ω/c, und ~e~k der zugehörige Einheitsvektor.
Der komplexe Vektor
p
~k(ω) ≡ r (ω)µr (ω) ~k0 (ω)
(XII.19)
~˜ ~r)
erfüllt dann die Bedingung (XII.18). Somit ist ein durch Gl. (XII.17) gegebenes Vektorfeld E(ω,
~ 0 und dem Wellenvektor ~k(ω) Lösung der Helmholtz-Gleichung.
mit beliebiger Amplitude E
~˜ ~r) bzw. H(ω,
~˜
Dazu muss E(ω,
~r) noch der Maxwell–Gauß- bzw. Maxwell–Thomson-Gleichung
genügen.58 Dies gibt
~ 0 = 0,
~ 0 = 0 bzw. i~k(ω) · H
i~k(ω) · E
d.h.
~0 = 0
~e~k · E
bzw.
~ 0 = 0.
~e~k · H
(XII.20)
Das elektrische und das magnetische Feld sind also senkrecht zur Propagationsrichtung: eine solche
Welle wird Transversalwelle genannt.
Schließlich liefert Gl. (XII.13c) die zusätzliche Beziehung
s
~ 0 , d.h. H
~ 0 = (ω) ~e~ × E
~k(ω) × E
~ 0 = ωµ(ω) H
~ 0.
(XII.21)
µ(ω) k
~0
~ 0, H
Somit sind die elektrische und magnetische Feldstärken orthogonal zueinander, und ~k(ω), E
bilden ein rechtshändiges System.
p
Die physikalischen Felder sind reell. Mit n(ω) = r (ω) µr (ω) kommt
~ ~r) = Re E
~ 0 ei[n0 (ω)~k0 (ω)·~r−ωt] e−n00 (ω)~k0 (ω)·~r ,
E(t,
~ 0 ei[n0 (ω)~k0 (ω)·~r−ωt] e−n00 (ω)~k0 (ω)·~r ,
~ ~r) = Re H
H(t,
wobei die Realteile der Summe unterschiedlicher Fourier-Komponenten entsprechen. Dann ist der
~ × H|
~ des Poynting-Vektors (XI.7) proportional zum Faktor
Betrag |E
2n00 (ω) ω
00
~
e−2n (ω) k0 (ω)·~r = e−α(ω) ` , mit α(ω) ≡
(XII.22)
c
dem Absorptionskoeffizient und ` = ~e~k · ~r dem Abstand in der Propagationsrichtung.
XII.2.4
c Dispersion
::::::::::::::::::::
Ist der Extinktionskoeffizient n00 (ω) null, so stellt der Ansatz (XII.17) (mit dem zugehörigen
magnetischen Feld) eine ebene Welle dar. Die Bedingung (XII.18) vereinfacht sich dann zur Relation
~k(ω)2 = ω 2 n0 (ω)2 /c2 , worin jetzt nur reelle Größen auftreten. Die Lösung dieser Bedingung für ω
liefert die Dispersionsrelation ω = ω(~k) = ω(k), wobei die letztere Identität aus der angenommenen
Isotropie des Mediums kommt.
Bemerkung: Konventionell werden die Kreiswellenzahl59 k(ω) = |~k(ω)| und die Kreisfrequenz ω
als positiv angenommen.
~˜ ~r) bzw. H(ω,
~˜
Tatsächlich wird Gl. (XII.13a) bzw. (XII.13b) in der Herleitung der Helmholtz-Gleichung für E(ω,
~r)
vorausgesetzt.
59
Die Kreiswellenzahl k ist gleich 2π mal der Wellenzahl 1/λ, mit λ der Wellenlänge.
58
XII. Elektromagnetische Wellen in Materie
121
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Im Rest dieses Paragraphs wird der Fall eines „normalen“ Materials mit positivem Brechungsindex n0 (ω) diskutiert. (Meta)Materiale mit negativer Brechzahl werden in Abschn. XII.2.5 a behandelt.
Im Allgemeinen ist n0 (ω) nicht konstant, so dass ω(k) eine nicht-lineare Funktion von k ist: somit
ist die Phasengeschwindigkeit der Welle gerichtet entlang ~e~k mit dem Betrag
ω(k)
(XII.23)
k
abhängig von der Frequenz. Infolgedessen ändert sich die Gestalt eines Wellenpakets, d.h. einer
Überlagerung von ebenen Wellen unterschiedlicher Frequenzen, in dessen Ausbreitung: man spricht
von Dispersionseffekten.
Aus der obigen Definition und Gl. (XII.18) folgt
c
c
ceff (ω) = p
= 0
.
(XII.24)
n (ω)
r (ω)µr (ω)
ceff (ω) =
Diese Phasengeschwindigkeit unterscheidet sich von der Gruppengeschwindigkeit
dω(k)
.
dk
Durch Differentiation der Beziehung k(ω) = ωn0 (ω)/c kommt für die Letztere
c
c
vg (ω) =
= 0
.
0
d[ωn (ω)]/dω
n (ω) + ω dn0 (ω)/dω
vg (ω) =
(XII.25)
(XII.26)
Wenn die Ableitung dn0 (ω)/dω negativ ist, spricht man von anomaler Dispersion. In einem solchen
Bereich ist die Gruppengeschwindigkeit größer als die Phasengeschwindigkeit, und eventuell auch
größer als c, oder gar negativ. Dies passiert nur in der Nachbarschaft einer Resonanz, insbesondere
für Kreisfrequenzen ωa < ω . ωa + Γa . Beispiele solcher anomalen Verhalten werden hiernach
gegeben.
XII.2.4
d Absorption
:::::::::::::::::::::
Wenn n00 (ω) > 0 nimmt der Betrag des Poynting-Vektors mit der Weglänge im Medium ab, d.h.
das elektromagnetische Feld verliert Energie an die Materie.60 In einem solchen Fall ist das Medium
nicht transparent.
Der Imaginärteil der Brechzahl spiegelt den Imaginärteil der dielektrischen Funktion (ω) oder
der Permeabilität µ(ω) wider. Damit ist n00 (ω) insbesondere bedeutend in der Nachbarschaft einer
Resonanz: man spricht von Bereichen mit resonanter Absorption.
Bemerkung: Die Möglichkeit solcher Energieübertragung wurde in Abschnitt XI.2 nicht berücksichtigt, weshalb dort nur nichtdispersive Medien betrachtet wurden.
XII.2.5 Phasen- und Gruppengeschwindigkeit
Die Phasengeschwindigkeit ceff (ω0 ) [Gl. (XII.23)] stellt die Geschwindigkeit der Propagation von
der Phase einer Welle der Kreisfrequenz ω0 dar.
Die Gruppengeschwindigkeit vg (ω0 ) [Gl. (XII.25)] gibt an, mit welcher Geschwindigkeit ein Wellenpaket bestehend aus einer Überlagerung von ebenen Wellen mit Frequenzen um eine zentrale
Frequenz ω0 propagiert. Dabei wird angenommen, dass in der Taylor-Entwicklung
dω(k) (k − k0 ) + · · · = ω0 + vg (ω0 )(k − k0 ) + · · ·
ω(k) = ω0 +
dk k0
die Terme höherer Ordnung vernachlässigbar sind: dies kann also nur gelten weit von der Nachbarschaft einer Resonanz, wo n(ω) und dabei [Gl. (XII.18)] k(ω) bzw. ω(k) schnell variiert.
Umgekehrt wird für n00 (ω) < 0 Energie durch das Medium an die Welle gegeben, wie es z.B. im Verstärker eines
Lasers der Fall ist.
60
XII. Elektromagnetische Wellen in Materie
122
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Die Definition der Gruppengeschwindigkeit beruht implizit auf der Annahme, dass die Gestalt
des Wellenpakets sich nicht zu stark ändert. Deshalb sollen die Frequenzen der Wellen im Paket
nicht zu breit verteilt sein, damit sie alle ungefähr mit der gleichen Phasengeschwindigkeit
propagieren.
Man kann zeigen [15], dass in solchen Bereichen, wo das Medium als dispersiv aber verlustfrei
(der Absorptionskoeffizient ist verschwindend gering) und linear wirkt, die Gruppengeschwindigkeit
gleich der Geschwindigkeit des Energieflusses ist.
Die Idee ist folgende. Sei f (t, x) die Amplitude einer eindimensionalen Welle zur Zeit t; für eine
fortschreitende Welle ist f der Form f (x − vt), mit v der Geschwindigkeit der Welle. In manchen
Fällen ist die Energiedichte in der Welle proportional zu f (t, x)2 = f (x−vt)2 , entsprechend einer
Bewegung der Energie mit Geschwindigkeit v. Schreibt man ein Wellenpaket als Überlagerung
Z
von ebenen Wellen
dk
f (t, x) = f˜(k) ei[kx−ω(k)t]
2π
mit Kreiswellenzahlen bzw. -frequenzen k bzw. ω(k), so führt die Taylor-Entwicklung der Letzteren zur ersten Ordnung zu
Z
dω(k0 )
i[k0 dω(k0 )/dk−ω0 ]t
ik(x−[dω(k0 )/dk]t) dk
i[k0 dω(k0 )/dk−ω0 ]t
˜
f (t, x) = e
f (k) e
=e
f x−
t, 0 ,
2π
dk
dω(k0 )
d.h. f ist (bis auf einer unwesentlichen Phase) Funktion der einzigen Variable x −
t, und
dk
propagiert mit der Geschwindigkeit dω(k0 )/dk.
Im Gegensatz wird in der Nachbarschaft einer Resonanz Energie dem Medium übertragen —
wenn n00 (ω) > 0 — oder durch das Medium gegeben — wenn n00 (ω) < 0 —, so dass der Begriff
eines gerichteten Energiestroms mit wohldefinierten Richtung und Geschwindigkeit an Sinn verliert.
Dementsprechend kann die Gruppengeschwindigkeit größer als c ohne Widerspruch zur speziellen
Relativitätstheorie werden, oder auch negativ.
Durch sorgfältige Betrachtungen haben Sommerfeld [16] und Brillouin [17] tatsächlich gezeigt,
dass in der Fortpflanzung in Materie einer elektromagnetischen Welle — genauer, eines stufenartiges Wellenpulses — die Wellenfront immer mit der Vakuumlichtgeschwindigkeit c propagiert,
unabhängig von den Werten der Phasen- und Gruppengeschwindigkeit: man spricht von dem
optischen Vorläufer (“optical precursor”). Somit propagiert die Information immer mit einer
Geschwindigkeit kleiner gleich c.
Diese Ausbreitung des Vorläufers mit c wurde neulich auf der Ebene eines einzelnen Photons
experimentell nachgewiesen [18], d.h. die im Rahmen der klassischen Physik hergeleitete Vorhersage von Sommerfeld und Brillouin gilt noch im Rahmen der Quantenfeldtheorie.
Im Folgenden werden einige unüblichen Verhalten von Medien dargelegt, die durch die Existenz
dieser Bereiche anomaler Dispersion bedingt sind.
XII.2.5
a Substanzen mit gleichzeitig negativen Werten der Permittivität und der Permeabilität
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Laut der Bedingung (XII.18) bzw. der Definition (XII.15) soll das Produkt r (ω) µr (ω) positiv
sein, damit eine Welle sich im Medium ausbreiten kann. Das heißt aber nur, dass r (ω) und µr (ω)
dasselbe Vorzeichen haben sollen, entweder positiv — wie in den vorigen Paragraphen angenommen
wurde — oder negativ. Die letztere Möglichkeit wird hiernach untersucht [19], für den Fall eines
verlustfreien linearen Mediums.
Wiederholt man die Herleitungen des Paragraphs XII.2.4 b, so findet man ausgehend von dem
~ 0 ein linkshändiges System bilden [vgl. Gl. (XII.21)].
~ 0, H
Ansatz (XII.17), dass ~k(ω), E
~ 0 immer
~ 0 = µ(ω) H
~ 0, B
Bemerkung: Dagegen prüft man einfach nach, dass das System ~k(ω), E
rechtshändig ist, egal, ob die Permeabilität positiv oder negativ ist.
Ein besonderes Phänomen ergibt sich bei der Brechung (vgl. Abschn. XII.1.3). Fällt eine Welle
der Kreisfrequenz ω, die in einem „normalen“ [r,A (ω) > 0, µr,A (ω) > 0] Dielektrikum propagiert,
XII. Elektromagnetische Wellen in Materie
123
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
auf die Grenzfläche mit einem Medium mit r,B (ω) < 0, µr,B (ω) < 0 ein, so propagiert die gebrochene Welle in diesem Medium auf der gleichen Seite der normalen Gerade zur Grenzfläche wie die
einfallende Welle, statt auf der anderen Seite wie in Abb. XII.1. Um dies zu berücksichtigen, kann
man entweder den Brechungswinkel θB im Brechungsgesetz (XII.5) als negativ betrachten, oder das
Gesetz als nA sin θA = nB sin θB mit einem negativen Brechungsindex nB schreiben, d.h. in diesem
Fall
p
n(ω) = − r (ω)µr (ω).
Dementsprechend wird die zweite Identität in Gl. (XII.24) — hier ist n(ω) = n0 (ω), denn das
Medium verlustfrei ist — ersetzt durch
c
c
ceff (ω) = p
=− 0
.
n
(ω)
r (ω)µr (ω)
Dies bleibt wie ω und k positiv, d.h. die Phase der Welle propagiert immer noch in die Richtung
des Wellenvektors ~k(ω).
Schließlich kommt für die Phasengeschwindigkeit, anstatt Gl. (XII.26), die Identität
vg (ω) =
c
dω(k)
c
p
=
=
0
dk
−d[ωn (ω)]/dω
d[ω r (ω)µr (ω)]/dω
für die Gruppengeschwindigkeit.
Sei eine Substanz, deren frequenzabhängige Permittivität und Permeabilität durch das Lorentz–
Drude-Modell gegeben sind, wobei für die Diskussion nur eine Resonanzfrequenz wichtig ist:61
r (ω) = 1 +
Ω2,0
2 − ω 2 − iωΓ
ω,0
,0
'
2
ω 2 − ω,1
2
ω 2 − ω,0
,
µ(ω) = 1 +
Ω2µ,0
2 − ω 2 − iωΓ
ωµ,0
µ,0
'
2
ω 2 − ωµ,1
2
ω 2 − ωµ,0
,
(XII.27)
q
q
2 + Ω2
2 + Ω2 . Das Vernachlässigen der Dämpfungsterme
ω,0
ωµ,0
mit ω,1 =
,0 und ωµ,1 =
µ,0
entspricht der Annahme eines verlustfreien Mediums. Im Allgemeinen gibt es keinen Zusammenhang
zwischen der Kreisfrequenz ω,j und ωµ,k für j, k = 0, 1. Hier wird aber angenommen, dass ω,0 = ωµ,0
und ω,1 = ωµ,1 . Der Kürze halber werden diese Kreisfrequenzen dann als ω0 bzw. ω1 bezeichnet.
Mit solchen Resonanzfrequenzen ist r (ω) bzw. µr (ω) negativ für ω0 < ω < p
ω1 , entsprechend
dem Bereich, wo die obige Diskussion relevant wird. In diesem Bereich nimmt ω r (ω)µr (ω) mit
ω ab, so dass die Gruppengeschwindigkeit ebenfalls negativ ist, d.h. entgegengesetzt zur Richtung
der Phasengeschwindigkeit. Diese Verhalten werden in Abb. XII.4 gezeigt.
p
r (ω) bzw.
ω r (ω)µr (ω)
µr (ω)
1
ω0
ω1
ω
1
ω0
ω1
Abbildung XII.4: Relative Permittivität bzw. Permeablität (links) und Produkt ω
(rechts) für die Abhängigkeiten (XII.27).
61
ω
p
r (ω)µr (ω)
Das folgende Beispiel wurde von Kirk T. McDonald geklaut [20].
XII. Elektromagnetische Wellen in Materie
124
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Metamateriale mit negativen Permittivität und Permeabilität in einem Frequenzintervall wurden experimentell entwickelt, sowohl im Mikrowellen- [21, 22] als im optischen Bereich [23]. Deren
Verhalten gegenüber Brechung kann dann benutzt werden, um „Tarnkappen“ herzustellen. Optische Linsen aus einem solchen Metamaterial können auch theoretisch „perfekt“ sein [24], d.h. deren
Auflösung überwindet die Beugungsbedingte Abbe-Grenze [25].
XII.2.5 b Langsames Licht
Jetzt wird die Fortpflanzung von Wellen in einem Material untersucht,62 dessen dielektrische
Funktion durch das Lorentz–Drude-Modell beschrieben wird, mit zwei eng benachbarten Resonanzen
ω1 = ω0 − ∆ bzw. ω2 = ω0 + ∆, wobei 0 < ∆ ω0 , mit jeweiligen Breiten Γ1 bzw. Γ2 und gleich
großen Amplituden Ω21 = Ω22 = Ω2 . Die (relative) Permeabilität wird als konstant im Bereich dieser
Resonanzen angenommen: µr (ω) = µr ' 1.
In „normalen“ Materialen entspricht Γa der Dämpfung der Schwingungen der Elektronen und
führt (mit positivem Wert) zur Absorption einfallender elektromagnetischer Wellen mit Frequenzen
in der Nachbarschaft der Resonanzfrequenz ωa . Hier wird angenommen, dass dieses Verhalten für
die niedrigere Resonanz bei ω1 gilt, aber dass bei der höheren Kreisfrequenz ω2 einfallende Wellen
verstärkt werden. Dies wird durch eine negative Dämpfungskonstante Γ2 modelliert. Der Einfachheit
halber wird Γ2 = −Γ1 ≡ −Γ mit 0 < Γ ω0 angenommen.
::::::::::::::::::::::::::
Die Schwächung im Medium einer Welle mit der Kreisfrequenz ωa entspricht quantenmechanisch
der Absorption von Photonen der Energie ~ωa , die gleich der Energiedifferenz zwischen zwei
Energieniveaus des Mediums ist. Im Fall einer Besetzungsinversion zwischen zwei Niveaus kann
dann die Intensität einer Welle mit der geeigneten Frequenz durch den Zerfall des angeregten
Niveaus verstärkt werden: dabei handelt es sich um den Laser-Effekt.
Unter Vernachlässigung der anderen Resonanzen lautet die relative dielektrische Funktion
Ω21
Ω22
+
ω12 − ω 2 − iωΓ1 ω22 − ω 2 − iωΓ2
ω02 − 2∆ω0 − ω 2 + iΓω
ω02 + 2∆ω0 − ω 2 − iΓω
' 1 + Ω2
+
,
(ω02 − 2∆ω0 − ω 2 )2 + Γ2 ω 2 (ω02 + 2∆ω0 − ω 2 )2 + Γ2 ω 2
r (ω) = 1 +
(XII.28)
wobei in der zweiten Zeile Terme der Ordnung ∆2 gegen solche der Ordnung ∆ω0 weggelassen
wurden.
Die Absorption einer einfallenden elektromagnetischen Welle mit der Kreisfrequenz ω wird durch
den Imaginärteil des Brechungsindex beschrieben. Für ω = ω0 ist r (ω0 ) = 1 und damit Im r (ω0 )
null. Eine Welle dieser Frequenz wird also nicht gedämpft, d.h. das Medium ist für solches „Licht“
transparent, was als “electromagnetically induced transparency” des Mediums bezeichnet wird.
Dementsprechend ist n(ω0 ) = 1, d.h. die Phasengeschwindigkeit (XII.24) bei dieser Frequenz ist
ceff (ω0 ) = c.
p
Unter Nutzung der Näherung n(ω) ' r (ω) ' 1 + 21 [r (ω) − 1] sieht man auch, dass Licht
mit einer Kreisfrequenz etwas kleiner bzw. größer als ω0 abgeschwächt bzw. verstärkt wird, wie in
Abb. XII.5 dargestellt wird.
Gleichung (XII.26) gibt dann die Gruppengeschwindigkeit bei ω0
vg (ω0 ) '
c (4∆2 + Γ2 )2
.
2Ω2 4∆2 − Γ2
Im Dampf eines Metalls mit der Ladungszahl Z ist Ω2 ' n e e2 /(0 me Z), mit n e der Elektronendichte. Für Natrium (Z = 11) mit n e = 5 · 1018 m−3 ergibt sich somit Ω2 ≈ 1, 46 · 1021 s−2 . Mit
Γ = ∆ = 5 · 106 s−1 erhält man vg (ω0 ) ≈ 21 m·s−1 . In einem Experiment mit den obigen Werten
von n e und Γ wurde eine Gruppengeschwindigkeit des Lichts von 17 m·s−1 gemessen [27].
62
Die Modellierung des Effekts wird wieder von K. T. McDonald genommen [26].
XII. Elektromagnetische Wellen in Materie
125
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
n0 (ω)
ω
1
n00 (ω)
0
ω0
ω1
ω2
ω
Abbildung XII.5: Real- (oben) und Imaginärteil (unten) des Brechungsindex n(ω) ' 1 + 21 [r (ω) − 1]
entsprechend der dielektrischen Funktion (XII.28) für Γ = ∆.
XII.2.5
c Negative Gruppengeschwindigkeit
::::::::::::::::::::::::::::::::::::::::::
Sei jetzt ein Material63 mit zwei eng benachbarten Resonanzen ω1 = ω0 − ∆ bzw. ω2 = ω0 + ∆
wobei ∆ ω0 , die beiden in Besetzungsinversionen (mithilfe eines Lasers) „gepumpt“ werden.64
Um diese Situation im Rahmen des klassischen Lorentz–Drude-Modells zu beschreiben, werden
den beiden Oszillatoren negative Amplituden zugeordnet,65 die hiernach gleich groß angenommen
werden: Ω21 = Ω22 = −Ω2 .
Dann lautet die relative dielektrische Funktion in der Nachbarschaft dieser Resonanzen
ω02 + 2∆ω0 − ω 2 + iΓω
ω02 − 2∆ω0 − ω 2 + iΓω
2
+
,
(XII.29)
r (ω) ' 1 − Ω
(ω02 − 2∆ω0 − ω 2 )2 + Γ2 ω 2 (ω02 + 2∆ω0 − ω 2 )2 + Γ2 ω 2
d.h. für den Brechungsindex [unter der Annahme µr (ω) ' 1]
Ω2
ω02 − 2∆ω0 − ω 2 + iΓω
ω02 + 2∆ω0 − ω 2 + iΓω
n(ω) ' 1 −
+
.
2 (ω02 − 2∆ω0 − ω 2 )2 + Γ2 ω 2 (ω02 + 2∆ω0 − ω 2 )2 + Γ2 ω 2
Der Verlauf dieses Brechungsindex wird in Abb. XII.6 dargestellt.
Für ω = ω0 gilt
Ω2
Γ
,
n(ω0 ) ' 1 − i
2(4∆2 + Γ2 ) ω0
d.h. die Phasengeschwindigkeit ist ceff (ω0 ) = c und der Absorptionskoeffizient α(ω0 ) =
(XII.30)
ΓΩ2
.
(4∆2 + Γ2 )c
Die Gruppengeschwindigkeit (XII.26) für ω = ω0 ist
2
2
2 4∆ − Γ
vg (ω0 ) ' c
1 − 2Ω
,
(4∆2 + Γ2 )2
d.h. kann für geeignete Werte von Ω2 , Γ2 und ∆2 negativ werden. Wenn Γ2 ∆2 wird diese
Phasengeschwindigkeit zu vg (ω0 ) ' c/ 1 − Ω2 /2∆2 .
63
Die folgende Modellierung stammt noch einmal aus einer Arbeit von K. T. McDonald [28].
Der Vorteil solcher Medien zum Nachweis „exotischer“ optischer Eigenschaften wurde in Ref. [29] betont.
65
Die korrekte quantenmechanische Beschreibung des Systems sollte auf den sog. optischen Bloch-Gleichungen
beruhen, die hier kein gutes klassisches Analogon haben.
64
XII. Elektromagnetische Wellen in Materie
126
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
n0 (ω)
ω
1
n00 (ω)
0
ω1
ω0
ω2
ω
Abbildung XII.6: Real- (oben) und Imaginärteil (unten) des Brechungsindex (XII.30).
In einem Experiment [30] wurde für die Gruppengeschwindigkeit des Lichts in einem CaesiumDampf vg (ω0 ) ' −c/310 gemessen, entsprechend einem Verhältnis Ω/∆ ∼ 24.
Eine solche negative Gruppengeschwindigkeit bedeutet, grob gesagt, dass der Energiestrom im
Medium in die entgegengesetzte Richtung zur Propagationsrichtung der einfallenden Welle im Vakuum ist. Dies ist ja möglich, da das Medium wegen der Besetzungsinversionen in einem „angeregten
Zustand“ ist, so dass es Energie emittieren kann.
XII.A Einfache Modelle für konstitutive Gleichungen
In diesem Anhang werden klassische mikroskopische Modelle für die elektrische Leitfähigkeit
eines Leiters bzw. für die elektrische Suszeptibilität eines Dielektrikums dargelegt. Diese Beschreibungen beruhen auf einer falschen Basis: gültige mikroskopische Modelle sollten quantenmechanisch
sein. Dennoch liefern sie korrekte funktionale Forme, d.h. das gute qualitative Verhalten, für die
jeweiligen Größen, und sollen somit wichtige physikalische Aspekte schon berücksichtigen.
Es seien klassische Ladungsträger mit der elektrischen Ladung q und der Masse m in einem
~
makroskopischen Körper. Diese Ladungen werden durch ein homogenes äußeres Feld E(t)
beschleunigt und durch Stöße (auf die mikroskopischen Bestandteile des Materials) abgebremst, mit einer
effektiven Kraft −mΓ~v (t) proportional zu deren Geschwindigkeit, wobei Γ > 0.
XII.A.1 Drude-Modell für die elektrische Leitfähigkeit
Für die frei beweglichen Ladungsträger in einem elektrischen Leiter lautet die Newton’sche
Bewegungsgleichung
d~v
~
m (t) = −mΓ~v (t) + q E(t).
(XII.31)
dt
In Abwesenheit des elektrischen Feldes nimmt irgendeine Anfangsgeschwindigkeit mit der charakteristischen Zeitdauer Γ−1 ab.
Gleichung (XII.31) kann noch als
i
d h Γt
q Γt ~
e ~v (t) =
e E(t)
dt
m
XII. Elektromagnetische Wellen in Materie
127
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
geschrieben werden, mit der nicht-lokalen Lösung
Z
Z
q t −Γ(t−t0 ) ~ 0
q ∞ −Γτ ~
0
~v (t) =
e
E(t ) dt =
e
E(t − τ ) dτ.
m −∞
m 0
(XII.32)
Somit hängt die Geschwindigkeit zur Zeit t vom elektrischen Feld zu früheren Zeitpunkten ab.
Für eine konstante Dichte n f von freien Ladungsträger wird die Stromdichte durch
2Z ∞
~ − τ ) dτ
~ = n f q~v (t) = n f q
e−Γτ E(t
(XII.33)
J(t)
m 0
gegeben. Deren Fourier-Transformierte lautet
Z ∞
Z ∞
Z
2Z ∞
n f q2 ∞
~ − τ) = nfq
~ − τ)
~˜
J(ω)
=
dτ e−Γτ E(t
dt eiω(t−τ ) E(t
dt eiωt
dτ e−(Γ−iω)τ
m −∞
m
0
−∞
0
Z
n f q2 ∞
n f q 2 1 ~˜
~˜
=
dτ e−(Γ−iω)τ E(ω)
=
E(ω),
m 0
m Γ − iω
entsprechend dem (verallgemeinerten) Ohm-Gesetz
n f q2 1
~˜
~˜
J(ω)
= σ(ω) E(ω)
mit σ(ω) =
m Γ − iω
der elektrischen Leitfähigkeit.
(XII.34)
XII.A.2 Lorentz–Drude-Modell für die elektrische Suszeptibilität
Jetzt werden gebundene Ladungsträger eines Dielektrikums betrachtet, die um ihre jeweilige
Gleichgewichtsstellen schwingen können. Für die zugehörige Bindekraft wird das Modell eines har~
~
monischen Oszillators F~ (t) = −mω02 X(t)
angenommen, mit X(t)
der Verschiebung des jeweiligen
Ladungsträgers aus seiner Gleichgewichtsstelle und ω0 einer Kreisfrequenz.
Die Bewegungsgleichung für einen Ladungsträger lautet dann
d~v
~
~
m (t) = −mω02 X(t)
− mΓ~v (t) + q E(t),
dt
~
mit ~v (t) = dX(t)/dt.
Die Fourier-Transformation dieser Bewegungsgleichung führt zu
˜
q ~˜
~
ω02 − iΓω − ω 2 X(ω)
= E(ω),
m
~˜
mit X(ω)
der Fourier-transformierten Verschiebung des Ladungsträgers. Dies gibt für die Polarisation
n g q2
1
˜
~˜
~˜
~˜
P~ (ω) = ng q X(ω)
=
E(ω)
= χe (ω) 0 E(ω)
(XII.35)
m ω02 − ω 2 − iΓω
mit n g der Dichte der gebundenen Ladungsträger und
χe (ω) =
n g q2
1
m0 ω02 − ω 2 − iΓω
(XII.36)
der frequenzabhängigen elektrischen Suszeptibilität.
Literatur
• Feynman [5, 6], Kapitel 32-3–32-7
• Jackson [8], Kapitel 7.1–7.3, 7.5, 7.8–7.10
• Landau–Lifschitz [4], Kapitel IX § 77–79 & 82–83
• Schwinger [10], Kapitel 5 & 7
• Sommerfeld [31], Kapitel III.
XII. Elektromagnetische Wellen in Materie
128
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
XIII. Elektrodynamik eines Plasmas
Als Plasma wird ein Zustand der Materie bezeichnet, bestehend aus frei beweglichen Ladungsträgern, der den ganzen zu Verfügung stehenden Raum besetzen kann. Ein Beispiel davon ist ein
teilweise oder völlig ionisiertes Gas.
Dank der Anwesenheit frei beweglicher Ladungsträger ist ein Plasma ein elektrischer Leiter.
Damit sollten die allgemeinen Ergebnisse der Abschnitte X.1 und XII.2.3 gelten. Hiernach wird ein
einfaches System betrachtet, mit nur zwei Arten von Ladungen: Elektronen (Ladung −e, Masse me ,
Dichte n e ) und positiv geladenen Ionen (Ladung +Ze mit Z ∈ N, Masse MZ me , Dichte n Z ).
Die Dichten werden durch Mittelung über Volumina erhalten, die viele Teilchen enthalten, so dass
die Fluktuationen δ n der Dichte klein bleiben: δ n n .
Dieses Plasma ist im thermischen Gleichgewicht bei der Temperatur T . Außerdem wird im
„Gleichgewichtszustand“ lokale Neutralität angenommen:
%0 (~r) = −en e (~r) + Zen Z (~r) = 0.
(XIII.1)
Im Folgenden wird angenommen, dass der Gleichgewichtszustand gleichförmig ist, sowie dass dass
alle Bestandteile die gleiche Temperatur haben.
Neben dem thermischen Gleichgewicht gilt auch das „chemische“ Gleichgewicht
IonZ+ + Z e− Ion(Z−1)+ + (Z − 1) e− · · · Atom.
(XIII.2)
Somit sind die Verhältnisse der Dichten der unterschiedlichen Ionen (wenn Z > 1) und der
zugehörigen neutralen Atome durch die Gleichgewichtsbedingung bestimmt. Hiernach werden
alle nicht völlig ionisierten Spezies vernachlässigt, entsprechend dem Hoch-Temperatur-Limes.
Bei sehr hohen Temperaturen werden auch Elektron-Positron-Paare erzeugt — diese Möglichkeit
wird hier nicht berücksichtigt.
Bemerkung: In einem ionisierten Gas sind die freien Ladungsträger Elektronen und Ionen, d.h.
elektrisch geladene Freiheitsgrade; damit handelt es sich um ein elektromagnetisches Plasma.
Weitere Plasmen sind auch (zumindest theoretisch) möglich für Teilchen, die Ladungen bezüglich
anderer Wechselwirkungen tragen: beispielsweise können die „farbgeladene“ Quarks und Gluonen
ein Quark-Gluon-Plasma bilden, das nicht durch die elektromagnetische Wechselwirkung geherrscht
wird, sondern durch die Quantenchromodynamik.
XIII.1 Klassifikation von Plasmen
Die Eigenschaften eines Plasmas im thermischen Gleichgewicht hängen nur von der Temperatur
T , der Teilchendichte eines der Bestandteile — z.B. n e — und den charakteristischen Größen der
Ladungsträger ab. Dann folgen die Dichten der anderen Bestandteilen aus der lokalen Neutralität (XIII.1) und gegebenenfalls aus den Gleichungen, die das chemische Gleichgewicht ausdrücken.
Je nach den Werten dieser Parameter können verschiedene Regime unterschieden werden.
XIII.1.1 Klassisches gegen Quantenplasma, relativistisch gegen nichtrelativistisch
Quanteneffekte in einem Plasma müssen
√ berücksichtigt werden, wenn die thermische de-BroglieWellenlänge66 der Elektronen λth ∼ ~/ me kB T derselben Größenordnung oder größer als der ty−1/3
pische Abstand zweier Elektronen ∼ n e
ist. Diese Effekte sind also vernachlässigbar wenn die
1/3 2
aus dem Pauli-Prinzip resultierende kinetische Energie („Nullpunktenergie“) ∼ ~n e
/2me viel
r
66
Für ein massives bzw. masseloses Teilchen gilt definitionsgemäß λth ≡
XIII. Elektrodynamik eines Plasmas
2π~2
π 2/3 ~c
bzw. λth ≡
.
mkB T
kB T
129
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
kleiner als die thermische Bewegungsenergie ∼ kB T ist. Wenn die Letztere außerdem viel kleiner als
die Massenenergie ist, dann ist das Plasma nichtrelativistisch. Für ein klassisches Plasma gilt also
1/3 2
~n e
kB T me c2 .
(XIII.3)
2me
Diese Bedingungen werden erfüllt im intergalaktischen bzw. interstellaren Plasma (n e ∼ 1−105 m−3 ,
T ∼ 106 − 104 K), in der Magneto- bzw. Ionosphäre von Planeten (für die Erde n e ∼ 107 − 1012 m−3 ,
T ∼ 107 − 103 K), sowie in den dichteren Plasmen erzeugt in Gasentladungen (n e ∼ 1016 m−3 ,
T ∼ 104 K) oder in Fusionsexperimenten (n e ∼ 1020 m−3 , T ∼ 108 K in Tokamaks, n e ∼ 1027 m−3 ,
T ∼ 107 K in Trägheitsfusionsexperimenten).
Im Fall des Plasmas im Zentrum der Sonne (n e ∼ 1032 m−3 , T ∼ 107 K) oder schwererer Sterne
dürfen die Quanteneffekte im Gegensatz nicht vernachlässigt werden.
In einem nichtrelativistischen entarteten Plasma gilt
1/3 2
~n e
kB T me c2 .
(XIII.4)
2me
Dies ist der Fall in weißen Zwergen (n e ∼ 1036 m−3 , T . 108 K — der Entartungsdruck der Elektronen ist für die Stabilität der weißen Zwerge gegen Gravitationskollaps verantwortlich) sowie für
das sog. „Elektronengas“ in einem (Halb)Leiter.
In relativistischen Plasmen sind Quanteneffekte nie vernachlässigbar. Wegen der hohen Temperatur werden nämlich Elektron-Positron-Paare ständig erzeugt, insbesondere mit kinetischen Energien kleiner oder derselben Größenordnung als kB T , d.h. für die der Unterschied zwischen klassischer
und Quantenstatistik erheblich ist. Ein relativistisches Plasma kann sogar entartet sein, wenn die
Nullpunktenergie ∼ ~c/n e−1/3 viel größer als kB T ist.
Ein Beispiel relativistisches Plasmas wird durch die Teilchen im frühen Universum dargestellt.
XIII.1.2 Schwach gegen stark wechselwirkendes Plasma
Die Wechselwirkungen in einem Plasma können als „schwach“ betrachtet werden, wenn die zuge−1/3
hörige charakteristische elektrostatische Energie hEpot i . e2 /(4π0 n e ) viel kleiner als die typische
kinetische Energie ist:
schwach wechselwirkendes Plasma ⇔ hEpot i hEkin i .
(XIII.5)
In solchen Plasmen werden Wechselwirkungen dann in erster Näherung vernachlässigt, und in einem
Schritt in Störungsrechnung behandelt.
In einem klassischen Plasma, wo die typische kinetische Energie der Teilchen gleich der thermischen Bewegungsenergie kB T ist, lautet diese Bedingung
1/3
e2 n e
kB T,
(XIII.6)
4π0
so dass die Wechselwirkungen mit sinkender Dichte schwächer werden.
In einem entarteten Plasma, wo die kinetische Energie durch die quantenmechanische Nullpunktenergie bestimmt wird, ist das Verhalten unterschiedlich. Wenn das Plasma nichtrelativistisch ist,
1/3 2
dann ist hEkin i ∼ ~n e
/2me , so dass die Wechselwirkungen vernachlässigbar sind wenn
1/3 2
1/3
~n e
e2 n e
,
(XIII.7)
4π0
2me
e2 me
1/3
d.h. n e : um so dichter das Plasma, desto schwächer die Wechselwirkungen.
2π0 ~2
Dies stellt eine gute Näherung in weißen Zwergen dar.
Für das Elektronengas in einem Leiter können im Gegensatz die Wechselwirkungen zwischen
den Elektronen nicht vernachlässigt werden.
XIII. Elektrodynamik eines Plasmas
130
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
In einem ultrarelativistischen Plasma, wo die Teilchendichte wegen der Paarerzeugung eine
untere Schranke besitzt, die aus dimensionalen Gründen der Ordnung (kB T /~c)3 sein soll, wird
Gl. (XIII.6) zu
e2 kB T
kB T,
(XIII.8)
4π0 ~c
d.h. αe.m. 1, mit αe.m. der Feinstrukturkonstante der Elektrodynamik. Damit sind die Wechselwirkungen in einem relativistischen elektromagnetischen Plasma immer vernachlässigbar.
XIII.2 Elektrostatik eines Plasmas
−1/3
Wechselwirkungen zwischen den Teilchen des Plasmas führen bei großen Abständen ` n e
zu kollektiven Effekten, wie z.B. der Abschirmung der elektrischen Ladung bzw. des Potentials.
In einem Punkt eines Plasmas im Gleichgewicht wird eine punktförmige Testladung q eingeführt:
als Antwort verschieben sich die Ladungsträger des Plasmas, entsprechend einer induzierten Polarisation bzw. Ladungsdichte. In der folgenden Herleitung wird der Einfachheit halber die Verschiebung
der Ionen vernachlässigt, d.h. ihre Masse wird als unendlich groß betrachtet.
Die Testladung erzeugt ein makroskopisches elektrisches Potential Φ(~r), mit dem Koordinatenursprung bei der Ladung, das der Poisson-Gleichung
− 4Φ(~r) =
%(~r)
q
%ind. (~r)
= δ (3) (~r) +
0
0
0
(XIII.9)
genügen soll, wobei %ind. die (makroskopische) induzierte Ladungsdichte bezeichnet. Diese lässt sich
im thermodynamischen Gleichgewicht einfach berechnen, indem die Energie E in der mittleren
Besetzungszahl durch E − eΦ(~r) ersetzt wird, d.h. unter Berücksichtigung der elektrostatischen
Energie. Für Elektronen wird die Besetzungszahl durch die Fermi–Dirac-Verteilung
f0 (E) =
exp
1
E−µ
+1
kB T
gegeben, die also in Anwesenheit der Testladung durch
fΦ (E) =
exp
1
E − eΦ(~r) − µe
+1
kB T
ersetzt wird, mit µe dem chemischen Potential der Elektronen. Somit ist die induzierte Ladungsdichte, entsprechend der Differenz zwischen den Ladungsdichten in Anwesenheit und in Abwesenheit
der Testladung,67 durch die Summe über alle Quantenzustände gegeben:
Z
d3 p~
%ind. (~r) = −2e fΦ (Ep~ ) − f0 (Ep~ )
,
(2π~)3
wobei die Abhängigkeit der Energie vom Impuls mithilfe des tiefgestellten p~ gekennzeichnet wird,
während der Faktor 2 dem Entartungsgrad der Spin- 21 Elektronen entspricht.
Wenn die potentielle elektrostatische Energie klein gegen die kinetische Energie ist, entsprechend
dem Fall eines schwach wechselwirkenden Plasmas, kann die Besetzungszahl fΦ (E) Taylor-entwickelt
werden:
df0
(E) für |eΦ(~r)| E.
fΦ (E) ' f0 (E) − eΦ(~r)
dE
Z
df0 (Ep~ ) d3 p~
0
2
Damit ergibt sich %ind. (~r) = 2e Φ(~r)
= − 2 Φ(~r) mit rD der durch
3
dE (2π~)
rD
67
Die Ladungsdichte der Elektronen in Abwesenheit der Testladung ist durch die lokale Neutralität (XIII.1) mit
der Ladungsdichte der Ionen verknüpft, die sich nicht ändert, wenn die Testladung eingeführt wird.
XIII. Elektrodynamik eines Plasmas
131
N.BORGHINI
Elektrodynamik in Materie
1
−2e2
≡
2
0
rD
Z
Theoretische Physik IV
df0 (Ep~ ) d3 p~
dE (2π~)3
(XIII.10)
definierten Debye-Länge, die nur von T , µe und den charakteristischen Größen der Elektronen
abhängt.
Schließlich wird die Poisson-Gleichung für das elektrische Potential zu einer (inhomogenen)
Helmholtz-Gleichung (XIII.9)
q
1
− 4Φ(~r) + 2 Φ(~r) = δ (3) (~r).
(XIII.11)
0
rD
Die physikalisch sinnvolle Lösung dieser Gleichung ist das abgeschirmte Potential 68
Φ(~r) =
q e−|~r|/rD
.
4π0 |~r|
(XIII.12)
Für Abstände zur Punktladung |~r| rD wird das Potential exponentiell klein. Dementsprechend
ist das elektrische Feld in einem statischen Plasma im Gleichgewicht annähernd null, wie im Inneren
eines Leiters im Gleichgewicht zu erwarten ist.
Beweis von Gl. (XIII.12): in Kugelkoordinaten gilt für r 6= 0
1 d2 1d
1d
4Φ(~r) =
rΦ(~r) =
r
r Φ(~r).
r dr2
r dr
r dr
Somit wird Gl. (XIII.11) zu
2
1d
1
1d
1
r Φ(~r) = 2 Φ(~r) ⇔
r Φ(~r) = ±
Φ(~r) für r 6= 0.
r dr
rD
r dr
rD
C
Die Lösung mit dem + Vorzeichen ist nicht physikalisch, so dass Φ(~r) = e−r/rD , mit C einer
r
Konstante.
Bei kleinen Abständen sollte die Ladung nicht abgeschirmt werden, entsprechend dem Potential
q
,
Φ(~r) ∼
r→0 4π0 r
woraus C = q/(4π0 ) folgt.
Ein alternativer Beweis wird in Anhang XIII.A dargelegt.
Gleichung (XIII.11) wurde hergeleitet unter Nutzung einer induzierten Ladungsdichte, die einem
durch die statistische Physik gegebenen Mittelwert entspricht. Somit gilt die Herleitung nur dann,
wenn viele Teilchen zum kollektiven Effekt beitragen: die Debye-Länge muss also viel größer als der
−1/3
typische Abstand zwischen den Elektronen sein, rD n e . Aus ihrer Definition (XIII.10) kann
man die Größenordnung der Debye-Länge abschätzen:
Z
1
e2 f0 (Ep~ ) d3 p~
e2 n e
∼
∼
,
2
0 hEkin i (2π~)3
0 hEkin i
rD
mit hEkin i der mittleren kinetischen Energie eines Elektrons im Plasma. Somit gilt
1
2 n 2/3
rD
e
1/3
∼
e2 n e
0
hEpot i
1
∼
,
hEkin i
hEkin i
mit hEpot i der mittleren potentiellen Energie eines Elektrons. Die Herleitung der Gl. (XIII.11) gilt
also für hEpot i hEkin i, d.h. in einem schwach wechselwirkenden Plasma.
Die charakteristische Längenskala der Abschirmung, rD , ist eine neue „makroskopische“ Skala.
3 befinden sich viele Teilchen, deshalb wird die Abschirmung (und andere
In einem Volumen rD
Polarisationseffekte) als ein kollektives Effekt bezeichnet.
68
Die mit dem Abstand |~r| zur Testladung wachsende Lösung kann weggelassen werden.
XIII. Elektrodynamik eines Plasmas
132
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Bemerkungen:
∗ In einem klassischen Plasma im Gleichgewicht69 kann man die Fermi–Dirac-Verteilung durch
die Boltzmann-Verteilung f0kl. (E) = e−(E−µ)/kB T ersetzen. Damit ist −df0kl. /dE = f0kl. (E)/kB T , so
dass die Debye-Länge (XIII.10) analytisch berechenbar wird:
r
0 kB T
rD =
.
(XIII.13)
n e e2
∗ Unter Berücksichtigung der Bewegung der Ionen wird die Debye-Länge wenig verschoben, wie
sich einfach prüfen lässt.70
∗ Für ~r 6= ~0 ist die Gleichung (XIII.11) analog der Bewegungsgleichung (Klein–Gordon-Gleichung)
eines relativistischen Teilchens mit der Masse m > 0
1 ∂2Φ
m2 c2
−
4Φ
+
Φ = 0,
c2 ∂t2
~2
wobei die Zeitableitung im statischen Fall verschwindet. Damit ist das Berücksichtigen der Polarisationseffekte äquivalent zur Zuordnung einer Masse mD ≡ ~/rD c, der Debye-Masse, zum Photon.
∗ Der Vergleich der Gl. (XIII.11) zur Festlegung des Potentials mit der Gl. (XII.14) für elektromagnetische Wellen in Materie gibt für das statische Plasma
1
µ(ω) (ω) ∼ − 2 2 ,
ω→0
rD ω
entsprechend [Gl. (XII.12b)] einem Leiter mit einer konstanten Permeabilität µ(ω) = µ(0), Γ1 = 0
2.
und Ω21 = 1/µ(0)rD
∗ Im Gegensatz zum elektrischen Feld wird das magnetische Feld nicht abgeschirmt.
XIII.3 Plasmaschwingungen
Sei ein Plasma im Gleichgewichtszustand, mit der Ladungsdichte %0 = −en e,0 + Zen Z = 0, der
~ 0 = ~0. Es wird angenommen, dass
Ladungsstromdichte J~0 = ~0 und dem elektrostatischen Feld E
kein äußeres magnetisches Feld vorhanden ist.
Unter einer externen Störung versetzen die Elektronen in Schwingungen um die mehr massiven
Ionen. Damit ändert sich die Ladungsdichte:
%(t, ~r) = −e n e,0 + n e,1 (t, ~r) + Zen Z = −en e,1 (t, ~r),
(XIII.14)
wobei die Verschiebung der Ionen vernachlässigt wurde. Dementsprechend ändert sich das elektrische
~ ~r) = E
~0 + E
~ 1 (t, ~r), sowie die Ladungsstromdichte
Feld: E(t,
~ ~r) = J~0 + J~1 (t, ~r) ' −en e,0~v1 (t, ~r),
J(t,
(XIII.15)
mit ~v1 der (kleinen) mittleren Geschwindigkeit der Elektronen. Hier wurde −ene,1~v1 als eine Größe
zweiter Ordnung vernachlässigt, entsprechend |n e,1 | n e,0 bzw. der Linearisierung der Gleichungen.
Diese Plasmaschwingungen verletzen momentan die lokale Neutralität, die sich nach einer typischen Zeitdauer TP ∼ ωP−1 wiederherstellt, mit ωP der Plasmafrequenz.
XIII.3.1 Plasmafrequenz
Mit der Ladungsdichte (XIII.14) und der Ladungsstromdichte (XIII.15) lautet die Kontinuitätsgleichung
∂ n e,1 (t, ~r)
~ · ~v1 (t, ~r) = 0.
−e
− en e,0 ∇
∂t
69
Die Abschirmung in klassischen Plasmen außer Gleichgewicht wird in Ref. [32] diskutiert.
Manchmal werden unterschiedliche Temperaturen für die Elektronen und die postiven Ionen angenommen („Zweitemperaturplasma“).
70
XIII. Elektrodynamik eines Plasmas
133
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Die Ableitung dieser Identität nach der Zeit gibt, unter Berücksichtigung des Grundprinzips der
Dynamik
∂ 2 n e,1 (t, ~r) en e,0 ~ ~
∇ · E1 (t, ~r) = 0,
−
∂t2
me
wobei der magnetische Teil der Lorentz-Kraft vernachlässigt wurde. Mithilfe der Maxwell–GaußGleichung ergibt sich schließlich
∂ 2 n e,1 (t, ~r)
+ ωP2 n e,1 (t, ~r) = 0,
(XIII.16a)
∂t2
d.h. Schwingungen der Elektronen relativ zu den Ionen (sog. Langmuir-Schwingungen) mit einer
Kreisfrequenz
s
ωP ≡
e2 n e,0
,
me 0
(XIII.16b)
der Plasmafrequenz .
r
Bemerkungen:
kB T
∗ Mit der klassischen Debye-Länge (XIII.13) und der mittleren Geschwindigkeit |~
v1 | ∼
me
eines Elektrons bei der Temperatur T gilt
|~
v1 |
,
ωP−1 ∼
rD
d.h. ωP−1 stellt die Zeitdauer dar, die ein Elektron zur Durchquerung der Länge rD benötigt.
∗ In Fourier-Darstellung lautet die Wellengleichung (XIII.16a) (−ω 2 + ωP2 ) ñ e,1 (ω, ~r) = 0. Der
Vergleich mit der Gl. (XII.14) für elektromagnetische Wellen in Materie zeigt, dass die Schwingungen
nicht propagieren (d.h. ~k = ~0), und gibt
ωP2
,
ω2
wobei die Normierung r (ω) µr (ω) → 1 für ω → ∞ benutzt wurde, entsprechend dem Verhalten
eines Leiters mit µr (ω) = 1, Γ1 = 0 und Ω21 = ωP2 .
r (ω) µr (ω) = 1 −
Für Kreisfrequenzen ω < ωP wird r (ω) µr (ω) negativ, d.h. der Brechungsindex (XII.15) wird rein
imaginär. Dementsprechend können elektromagnetische Wellen mit solchen Frequenzen nicht im
Plasma propagieren, sondern werden reflektiert. Diese Tatsache wird für Radiowellen benutzt, die
an der unteren Ionosphäre reflektiert werden.
XIII.3.2 Longitudinale und tranversale Wellen
Eine detaillierte (aber noch vereinfachte) Analysis zeigt, dass es zwei Arten von Plasmaschwingungen71 mit unterschiedlichen Dispersionsrelationen gibt.
XIII.3.2
a Zwei-Fluid-Modell. Bewegungsgleichungen
:::::::::::::::::::::::::::::::::::::::::::::::::::
Im Folgenden werden die Teilchen einer gegeben Spezies als ein Fluid betrachtet, mit einer
Strömungsgeschwindigkeit ~v(t, ~r), die gleich der mittleren Geschwindigkeit der Teilchen ist, d.h.
gleich der Geschwindigkeit, die im Ausdruck der makroskopischen Ladungsstromdichte auftritt.
Für das hier betrachtete Zweikomponenten-Plasma wird also ein Zwei-Fluid-Modell benutzt: das
Elektronenfluid ist in Bewegung (~ve = ~v1 ), das Ionenfluid ruht.
Die Konsistenz der Modellierung als ein Fluid erfordert, dass die Wellenlänge des elektromagnetischen Feldes in der Materie viel größer als die mittlere freie Weglänge `mfp der Teilchen im
Plasma sein soll, d.h. für den Wellenvektor |~k| `−1
mfp .
71
Tatsächlich gibt es noch mehr Arten von Schwingungen in einem Plasma, insbesondere in Anwesenheit eines
„externen“ magnetischen Feldes, dessen Richtung die Isotropie des Plasmas zerstört.
XIII. Elektrodynamik eines Plasmas
134
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Die Grundgleichungen des Modells sind auf der einen Seite die makroskopischen Maxwell~ und B
~ ausgedrückt werden,
Gleichungen, die hiernach bezüglich der makroskopischen Felder E
und die Euler-Gleichung in Anwesenheit der Lorentz-Kraftdichte. Die Letztere lautet
∂~v1 (t, ~r) ~
~ P (t, ~r) − en e (t, ~r) E(t,
~ ~r) +~v1 (t, ~r) × B(t,
~ ~r) .
me n e (t, ~r)
+ ~v1 (t, ~r) · ∇ ~v1 (t, ~r) = −∇
∂t
(XIII.17)
Die Linearisierung dieser Gleichung führt zum Weglassen des konvektiven Terms in der linken
Seite und des magnetischen Teils in der rechten Seite. Außerdem gilt gemäß der Definition (IV.19)
~ P (t, ~r) = c2s ∇[m
~ e n e (t, ~r)] = me c2 ∇
~
der Schallgeschwindigkeit ∇
r).
s n e,1 (t, ~
Damit lautet die zeitliche und räumliche Fourier-Darstellung der Gl. (XIII.17) und der MaxwellGleichungen, unter Berücksichtigung der Gl. (XIII.14) und (XIII.15)
e
i~k · E~ (ω, ~k) = − ne,1 (ω, ~k),
(XIII.18a)
0
~
~k) = 0,
i~k · B(ω,
(XIII.18b)
~
~k) = ~0,
i~k × E~ (ω, ~k) − iω B(ω,
(XIII.18c)
~
~k) + i ω E~ (ω, ~k) = − e n e,0 ~v#1 (ω, ~k),
i~k × B(ω,
c2
0 c2
(XIII.18d)
− iωme n e,0 ~v#1 (ω, ~k) = −me c2s i~k ne,1 (ω, ~k) − en e,0 E~ (ω, ~k).
(XIII.18e)
sowie
~
Hier bezeichnen E~ , B,
ne,1
~ B,
~ n e,1 , ~v1 .
, ~v#1 die Fourier-Transformierten von E,
XIII.3.2
b Wellengleichung
::::::::::::::::::::::::::
~
~
B(ω, k) lässt sich mithilfe von Gl. (XIII.18c) in Abhängigkeit von E~ (ω, ~k) ausdrücken. Die
Multiplikation nach links mit i~k gibt dann
~
~k) = i ~k × ~k × E~ (ω, ~k) = i ~k · E~ (ω, ~k) ~k − ~k 2 E~ (ω, ~k) ,
i~k × B(ω,
ω
ω
was in der linken Seite der Gl. (XIII.18d) eingesetzt werden kann. Die rechte Seite dieser selben Gleichung kann mithilfe der Gl. (XIII.18e), multipliziert mit e/0 c2 , umgeschrieben werden. Schließlich
ergibt sich
i ~ ~
ω
1 −e ne,1 (ω, ~k) 2 ~ e2 n e,0 ~
~k) .
k · E (ω, ~k) ~k − ~k 2 E~ (ω, ~k) + i 2 E~ (ω, ~k) =
c
i
k
−
E
(ω,
s
ω
c
iωc2
0
0 me
Im ersten Term in den Klammern auf der rechten Seite erkennt man die rechte Seite der Maxwell–
Gauß-Gleichung (XIII.18a), während im zweiten Term die Plasmafrequenz (XIII.16b) auftritt. Somit
lässt sich diese Gleichung schreiben als
c2 ~k · E~ (ω, ~k) ~k − ~k 2 E~ (ω, ~k) + ω 2 E~ (ω, ~k) = c2s ~k · E~ (ω, ~k) ~k + ωP2 E~ (ω, ~k).
(XIII.19)
Dies stellt die Wellengleichung für das elektrische Feld dar.
XIII.3.2
c Longitudinale und transversale Schwingungsmoden
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Man definiert die longitudinale bzw. transversale Komponente des elektrischen Feldes (bezüglich
der Richtung des Wellenvektors ~k) durch
~k · E~ (ω, ~k)
~k,
E~k (ω, ~k) ≡
~k 2
(XIII.20a)
~k 2 E~ (ω, ~k) − ~k · E~ (ω, ~k) ~k
E~⊥ (ω, ~k) ≡ E~ (ω, ~k) − E~k (ω, ~k) =
.
~k 2
(XIII.20b)
XIII. Elektrodynamik eines Plasmas
135
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
Diese Komponenten sind für beliebigen ~k orthogonal:
2 i
1 h ~ ~ 2~ 2
E~k · E~⊥ =
k · E k − ~k · E~ ~k 2 = 0
(~k 2 )2
∀~k.
Durch Einsetzen der Zerlegung E~ = E~k + E~⊥ in Gl. (XIII.19) ergibt sich die Wellengleichung
i
i
h
h
(XIII.21)
ω 2 E~k (ω, ~k) + E~⊥ (ω, ~k) = ωP2 E~k (ω, ~k) + E~⊥ (ω, ~k) + c2s~k 2 E~k (ω, ~k) + c2~k 2 E~⊥ (ω, ~k),
die mithilfe der Orthogonalitätseigenschaft zu zwei unterschiedlichen Dispersionsrelationen für die
Komponenten E~k , E~⊥ führt:
• für die transversale Komponente E~⊥ (ω, ~k), entsprechend zwei Polarisationszuständen, gilt
ω(~k)2 = ωP2 + c2~k 2 .
(XIII.22)
Fortschreitende Wellen mit einem reellen Wellenvektor können nur für ω > ωP existieren. Dann
~
~k) = (~k/ω) × E~ (ω, ~k), d.h. das entsprechende magnetische Feld ist
gilt [Gl. (XIII.18c)] B(ω,
auch transversal, wie im Vakuum: somit spricht man von elektromagnetischen Plasmawellen.
Die Phasen- bzw. Gruppengeschwindigkeit dieser Wellen ist
ωP2 −1/2
ωP2 1/2
ceff (ω) = c 1 − 2
,
vg (ω) = c 1 − 2
,
ω
ω
d.h. größer bzw. kleiner als c, die aber die Größenordnung dieser Geschwindigkeiten darstellt.
• für die longitudinale Komponente E~k (ω, ~k), entsprechend einem einzigen Polarisationszustand,
lautet die Dispersionsrelation (sog. Bohm-Gross Dispersionsrelation)
ω(~k)2 = ω 2 + c2~k 2 .
(XIII.23)
P
s
d.h. diese Langmuir-Wellen propagieren nur für ω > ωP , mit einer Phasen- bzw. Gruppengeschwindigkeit vergleichbar mit der Schallgeschwindigkeit.72
Bemerkungen:
∗ Die Zerlegung in longitudinale und transversale Komponenten kann für ein beliebiges Vektorfeld
~ (~r) durchgeführt werden. Sei V~ (~k) die räumliche Fourier-Transformierte des Feldes. Für jeden ~k
V
führt man die Tensoren
~ ~
~k ⊗ ~k
~
~
~~ ~
~Pk (~k) ≡ k ⊗ k ,
P⊥ (k) ≡ ~~1 − ~Pk (~k) = ~~1 −
(XIII.24)
~k 2
~k 2
ki kj
ki kj
und (P⊥ )ij = δij −
.
ein, mit den jeweiligen Komponenten (Pk )ij =
~k 2
~k 2
~~ ~
~
Pk (k) bzw. ~P⊥ (~k) projiziert einen Vektor auf die Richtung von ~k bzw. auf die Ebene senkrecht zu
~k. Damit ergibt sich73 V~ (~k) = V~k (~k) + V~⊥ (~k) mit
~
V~k (~k) = ~Pk (~k) · V~ (~k),
~
V~⊥ (~k) = ~P⊥ (~k) · V~ (~k),
V~k (~k) · V~⊥ (~k) = 0 ∀~k.
∗ In der Näherung eines kalten Plasmas wird die thermische Bewegung der Elektronen (und a
fortiori der Ionen) vernachlässigt: somit üben die Elektronen keinen Druck aus, entsprechend cs = 0.
In diesem Fall vereinfacht sich die Dispersionsrelation (XIII.22) zu ω 2 = ωP2 , d.h. die Wellen können
nur mit der Plasmafrequenz ωP propagieren.
Dies ist im Gegensatz zur Propagation einer Schallwelle in einem Gas oder einer Flüssigkeit, wobei
die Frequenz beliebig sein kann.
72
Die entsprechenden Wellen der Ionen, wenn diese als beweglich betrachtet werden, werden als Ionen-Schallwellen
bezeichnet.
~
~
73
~Pk (~k) · ~
~P⊥ (~k) = ~
~P⊥ (~k) · ~
~Pk (~k) = 0.
~1 und ~
Dies folgt aus den Eigenschaften ~Pk (~k) + ~P⊥ (~k) = ~
XIII. Elektrodynamik eines Plasmas
136
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
XIII.A Alternativer Herleitung des abgeschirmten Potentials
Eine Möglichkeit, um die Helmholtz-Gleichung (XIII.11) zu lösen, besteht in dem Durchführen
einer räumlichen Fourier-Transformation. Dann wird die Gleichung zu
~k 2 − k 2 Φ̃(~k) = q
D
0
⇔
q
1
Φ̃(~k) =
,
2
2
~
0 k − kD
−1
mit kD = rD
. Die inverse Transformation lautet
Z 1
Z ∞
Z
k2
q
d3~k
−ikr cos θ
−i~k·~
r
~
= 2
e
d(cos θ) dk
Φ̃(k)
Φ(~r) = e
2
(2π)3
4π 0 0 k 2 + kD
−1
Z ∞
Z ∞
iq
q
i −ikr
k2
k
ikr
= 2
e
−e
dk = 2
e−ikr − eikr dk,
2
2
2
2
4π 0 0 k + kD kr
4π 0 r 0 k + kD
mit θ dem Winkel zwischen ~k und ~r. Wenn I das Integral im letzten Glied bezeichnet, dann gilt
dank der Geradheit des Integranden
Z +∞
Z
k e−ikr
k
1 ∞
−ikr
ikr
e
−
e
dk
=
I=
2
2 dk,
2
2 −∞ k 2 + kD
−∞ k + kD
wobei die zweite Identität aus der Variablenänderung k → k 0 = −k folgt. Dieses Integral lässt sich
mithilfe des Residuensatzes berechnen. Die Polstellen des Integranden in der komplexen Ebene sind
bei k = ±ikD . Der Faktor e−ikr deutet einen Pfad Γ in der unteren Halbebene an, bestehend aus
der reellen Achse und einem Halbkreis im Unendlichen: dann spielt nur das Residuum bei k = −ikD
eine Rolle. Da der Pfad im Uhrzeigersinn durchlaufen wird, taucht ein − Vorzeichen auf. Schließlich
ergibt sich
I = −iπ e−kD r ,
und somit
Φ(~r) =
q
e−kD r ,
4π0 r
entsprechend Gl. (XIII.12).
Literatur
• Feynman [5, 6], Kapitel 7.3–7.4
• Lifschitz–Pitajewski [33], Kapitel III.
XIII. Elektrodynamik eines Plasmas
137
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
XIV. Makroskopische Aspekte der Supraleitung
In diesem Kapitel werden einige Aspekte der Phänomenologie der Supraleitung vorgestellt, mit
einem Akzent auf den „Theorien“ — eigentlich sollten sie Modelle genannt werden —, die vor
der Entwicklung der Bardeen–Cooper–Schriefer- (BCS-)Theorie vorgeschlagen wurden, um gewisse
Phänomene zu reproduzieren.
Für „konventionelle“ Supraleiter — d.h. solche, die durch die BCS-Theorie erklärt werden —
sind die hiernach skizzierten Beschreibungen nur geschichtlich interessant, denn man verfügt
jetzt über eine bessere Theorie. Für die nach 1986 entdeckten „Hochtemperatursupraleiter“ und
die seit 2008 gefundenen Pniktiden ist die endgültige Theorie noch nicht klar, so dass die phänomenologische Beschreibung interessant bleibt.
XIV.1 Phänomene der Supraleitung
XIV.1.1 Einige experimentelle Ergebnisse
Bei einigen Substanzen findet bei einer bestimmten tiefen Temperatur Tc ein Phasenübergang
statt. Im neuen Zustand weist das Material neue Eigenschaften auf:
• Wie es Kamerlingh Onnes (1911) in Quecksilber unter Tc = 4, 2 K entdeckt hat,74 verschwindet
der (stationäre) spezifische elektrische Widerstand — anders gesagt divergiert die elektrische
Leitfähigkeit σel. —, so dass ein elektrischer Strom auch ohne angewandte Spannung fließen
kann.
Da dieser Strom keine Energie durch Ohm’sche Dissipation abgibt, fließt er prinzipiell andauernd. Experimentell wurde für die typische Zeitkonstante für das Abklingen solcher Ströme
eine untere Schranke von 105 Jahre abgeschätzt [35].
Diesem Phänomen nach wird der Zustand als supraleitend bezeichnet.
• Das magnetische Feld — genauer, die magnetische Flussdichte — innerhalb des Materials
~ = ~0, auch wenn das Material in einem äußeren Feld aufgestellt ist. Dieser
verschwindet B
Meißner–Ochsenfeld-Effekt wird hiernach weiter diskutiert (Paragraph XIV.1.2 a).
• Der magnetische Fluss durch einen supraleitenden Ring wird quantisiert, d.h. kann nur diskrete
Werte annehmen (Paragraph XIV.3.3 c).
Bemerkungen:
∗ An manchen Orten liest man, dass es in Supraleitern keine thermoelektrische Effekte — wie z.B.
die Induktion einer elektromotorischen Kraft bzw. eines elektrischen Stroms durch einen Temperaturgradienten (Seebeck-Effekt) — gibt. Dies ist aber nicht der Fall, vgl. die Diskussion in Abschn. IV
von V. Ginzburgs Nobel Lecture [36].
∗ Eine wichtige experimentelle Beobachtung, die bei der Entwicklung der BCS-Theorie geholfen
hat, ist die Abhängigkeit der Sprungtemperatur Tc nach der isotopischen Zusammensetzung der
Substanz [37, 38]. Somit spielen nicht nur die supraleitenden Ladungsträger eine Rolle, sondern
auch die Struktur des kristallinen Gitters, in dem sie sich bewegen.
XIV.1.2 Supraleitung in Anwesenheit eines äußeren magnetischen Feld
Schon 1914 beobachtete Kamerlingh Onnes,74 dass Materiale nicht in ihren supraleitenden Zustand gebracht werden können, falls sie in einem zu starken äußeren magnetischen Feld sind. Somit
74
Zur Geschichte der ersten Jahre der Supraleitung s. Ref. [34], wo die Artikel von Kammerlingh Onnes zitiert sind.
XIV. Makroskopische Aspekte der Supraleitung
138
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
lässt sich das Phasendiagramm solcher Substanzen günstig in der Magnetfeld-Temperatur-Ebene
darstellen. Dabei ist aber ein wichtiges Phänomen zu berücksichtigen, und zwar der Meißner–
Ochsenfeld-Effekt.
XIV.1.2
a Meißner–Ochsenfeld-Effekt
::::::::::::::::::::::::::::::::::::
~ aus dem
Meißner und Ochsenfeld haben 1933 entdeckt, dass die magnetische Flussdichte B
Inneren eines in einem Magnetfeld aufgestellten Supraleiters verdrängt wird [39]. Somit sind Supraleiter „perfekte Diamagnete“ mit der magnetischen Suszeptibilität χm = −1, entsprechend einer
~ = −H
~ und daher B
~ = µ0 ( H
~ +M
~ ) = ~0.
Magnetisierung M
Auf den ersten Blick könnte der Effekt nur als eine „triviale“ Folge der Lenz-Regel aussehen. Dafür kann man ein erstes Experiment betrachten, in dem die Substanz zunächst in den supraleitenden
Zustand bei Null magnetischem Feld abgekühlt wird. Wird ein äußeres Magnetfeld — charakteri~ — dann eingeschaltet, so bleibt die Flussdichte im
siert durch dessen magnetische Feldstärke H
Supraleiter Null. Das Ergebnis dieses Experiments lässt sich „klassisch“ erklären: der Lenz-Regel
nach werden Ströme innerhalb des Supraleiters induziert, die wegen der unendlichen Leitfähigkeit
~ ausgleichen können.
nicht gedämpft werden, und somit die magnetische Flussdichte B
Ein zweites Experiment zeigt aber, dass diese Erklärung des Meißner–Ochsenfeld-Effekts nicht
~ ext angelegt.
gilt. Sei das Material jetzt bei T > Tc in einem nicht-verschwindenden äußeren Feld H
~ 6= ~0 im
Da die Substanz in ihren „normalen“ Zustand ist, ist sie kein perfektes Diamagnet, d.h. B
~ ext ab,
Material. Kühlt man dann das Material in dessen supraleitenden Zustand bei konstantem H
~ = ~0, was sich nicht mit der Lenz-Regel erklärt lässt, denn das äußere Magnetfeld
so wird plötzlich B
hat sich nicht geändert.
Somit ist der Meißner–Ochsenfeld-Effekt keine „einfache“ Folge der Supraleitfähigkeit, sondern
er spiegelt eine grundlegende Eigenschaft wider. Die gute Idee zur Beschreibung der Supraleitung
besteht eher darin, das supraleitende Verhalten durch die magnetischen Eigenschaften zu erklären.
~ etwa 0, 1 µm tief in das
Genauere Untersuchung zeigen, dass die magnetische Flussdichte B
Material eindringen kann. Diese messbare Längenskala wird als (London-)Eindringtiefe bezeichnet,
entsprechend der typischen Länge für die Abschirmung der magnetischen Flussdichte.
Bemerkung: Experimentell wurde gefunden, dass die Eindringtiefe stark von der Konzentration
von Verunreinigungen im supraleitenden Material abhängt. Dagegen hängt die Sprungtemperatur
nicht davon ab.
XIV.1.2
b Kritische Feldstärke
::::::::::::::::::::::::::::::
Wie bereits erwähnt gibt es für Materiale mit einer supraleitenden Phase eine kritische magnetische Feldstärke Hc , entsprechend dem maximalen äußeren Feld, das den Übergang zur Supraleitfähigkeit erlaubt.
Genauer existieren zwei Arten von Supraleitern:
Bei Supraleitern vom Typ I gibt es für eine gegebene Temperatur T ≥ Tc eine einzige kritische
Feldstärke Hc (T ): unterhalb dieses Feldes ist das Material supraleitend und perfekt diamagnetisch;
oberhalb Hc (T ) hat es eine endliche Resistivität und „normale“ magnetische Eigenschaften:
H 6
Hc,0
normal
"
Hc (T ) ' Hc,0 1 −
Supraleiter
T
Tc
2 #
.
-
Tc
T
XIV. Makroskopische Aspekte der Supraleitung
139
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
In einem nicht Null magnetischen Feld ist der Phasenübergang erster Ordnung, d.h. latente
~ = ~0 — in
Wärme wird am Übergang ausgetauscht. Dagegen ist der Übergang kontinuierlich für H
der Ehrenfest-Klassifikation ist er zweiter Ordnung, denn die Wärmekapazität ist unstetig.
Supraleiter vom Typ II besitzen zwei kritische Feldstärken Hc,1 (T ) < Hc,2 (T ) für eine gegebene
Temperatur T < Tc . Unter Hc,1 (T ) ist das Material in einer „Meißner-Phase“ mit vollständigem
perfektem Diamagnetismus und verschwindender elektrischer Leitfähigkeit. Zwischen Hc,1 (T ) und
Hc,2 (T ) ist das Material noch supraleitend, doch der Meißner-Ochsenfeld-Effekt ist unvollständig:
das äußere Magnetfeld kann den Supraleiter innerhalb dünner Wirbel durchdringen, wie durch
Abrikosow vorhergesagt wurde [40], so dass die Phase nicht mehr homogen ist. Man spricht von
einer gemischten oder Schubnikow-Phase. Oberhalb Hc,2 (T ) ist das Material in dessen normalen
Phase.
H 6
Hc,2 (T )
normal
gemischter
Zustand
~ ~
Hc,1 (T ) B 6= 0
Supraleiter
~ = ~0
B
-
Tc
T
XIV.2 Erste Beschreibungen: London- & Pippard-Theorien
XIV.2.1 London-Theorie
Um die damals bekannten Phänomene zu beschreiben, haben Fritz & Heinz London 1935 eine
konstitutive Gleichung für die Stromdichte in einem Supraleiter vorgeschlagen [41]
e2 n e,S ~
J~S (~r) = −
A(~r),
me
(XIV.1)
wobei n e,S die Dichte der Elektronen, die zur Supraleitung beitragen,75 bezeichnet. Diese Dichte
wird aber nicht durch das Modell bestimmt.
~ · J~S (~r) = 0. Die konstitutive BezieIm stationären Zustand lautet die Kontinuitätsgleichung ∇
~ · A(~
~ r) = 0 für das Vektorpotential, die in diesem
hung (XIV.1) liefert dann die Eichbedingung ∇
76
Kontext als London-Eichung bezeichnet wird. Somit ist die Eichung in Gl. (XIV.1) schon fixiert.
Bemerkung: Die Gebrüder London führten auch eine zweite konstitutive Gleichung ein, die nur im
nicht-stationären Fall eine Rolle spielt, und das elektrische Feld in Beziehung mit der Stromdichte
setzt. Diese Relation wird hier nicht weiter erwähnt.
Mit der Stromdichte (XIV.1) lautet die stationäre Maxwell–Ampère-Gleichung
2
~ × B(~
~ r) = µ0 J~S (~r) = − e n e,S A(~
~ r).
∇
0 me c2
Bildet man die Rotation dieser Identität, so ergibt sich
2
~ × ∇
~ × B(~
~ r) = ∇
~ ∇
~ · B(~
~ r) − 4B(~
~ r) = − e n e,S B(~
~ r),
∇
0 me c2
75
76
Diese Elektronen werden hiernach der Kürze halber „supraleitende Elektronen“ genannt.
In Kap. VII hieß sie Coulomb-Eichung.
XIV. Makroskopische Aspekte der Supraleitung
140
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
d.h. unter Berücksichtigung der Maxwell–Thomson-Gleichung
~ r) −
4B(~
e2 n e,S ~
B(~r) = ~0.
0 me c2
(XIV.2)
Die physikalisch relevanten Lösungen zu dieser Gleichung sind exponentiell abnehmende Funktionen,
die die Abschirmung der magnetischen Flussdichte mit der typischen Längenskala
r
0 me
c
λL = c
=
(XIV.3)
e2 n e,S
ωP
beschreiben. Dies entspricht also genau der Eindringtiefe des magnetischen Feldes.
In der zweiten Identität ist ωP die Plasmafrequenz [Gl. (XIII.16b)] assoziiert mit den supraleitenden Elektronen. Ist die Letztere im Ultraviolett, so ist λL der Ordnung 0,1 µm, wie in Experimenten.
Die London-Eindringtiefe (XIV.3) hängt nicht von den Verunreinigungen im Supraleiter ab,
sondern nur von den Elektronen. Nach der Entdeckung des Einflusses dieser Verunreinigungen war
es daher notwendig geworden, eine neue Längenskala und somit neue Modelle einzuführen.
XIV.2.2 Pippard-Theorie
Eine solche zweite Längenskala ist insbesondere in der durch Pippard entwickelten Beschreibung
zu finden [42]. Dabei handelt es sich um eine nicht-lokale Theorie für das stationäre Regime, in der
die Stromdichte in einem Punkt ~r nicht nur vom Vektorpotential im gleichen Punkt abhängt, sondern
von dessen Werte in einem Bereich der typischen Größe ξ um den Punkt:
Z 0 · A(~
2n
~ r 0 ) ~r − ~r 0
~
r
−
~
r
3e
0
e,S
J~S (~r) = −
e−|~r−~r |/ξ d3~r 0 .
(XIV.4)
4πξ0 me
|~r − ~r 0 |4
Die neue Längenskala ξ heißt Kohärenzskala.
Für die Letztere hat Pippard den Ansatz
1
1
1
=
+
ξ
ξ0 α`mfp
(XIV.5)
vorgeschlagen. Dabei bezeichnet `mfp die mittlere freie Weglänge der Elektronen im Supraleiter,
die von der Konzentration an Verunreinigungen anhängt, während α eine phänomenologische Zahl
der Ordnung 1 ist — in Messungen an supraleitendem Zinn mit Indium-Verunreinigungen wurde
α = 0.80 gefunden. ξ0 ist die Kohärenzskala im reinen Supraleiter, d.h. formell für `mfp → ∞.
~ konstant ist oder langsam variiert, findet man die Stromdichte der LondonBemerkung: Wenn A
Theorie wieder, mit einem Faktor ξ/ξ0 in der konstitutiven Gleichung.
Je nach den Werten der zwei Längenskalen λL und ξ ergeben sich unterschiedliche Möglichkeiten77
• für λL ξ ergibt sich die London-Theorie für einen Supraleiter mit lokalen Eigenschaften;
dies entspricht Supraleitern vom Typ II.
• für ξ λL ist der Supraleiter nicht-lokal, was dem Typ I entspricht.
Der Ausdruck (XIV.4) der Stromdichte J~S (~r) stellt ein Faltungsprodukt dar: Durch räumliche
Fourier-Transformation ergibt sich dann eine lokale Beziehung im reziproken Raum, der Art
~
˜
~˜ q ),
µ0 J~S (~q) = −~K(~q) · A(~
(XIV.6)
~
wo der Faktor µ0 konventionell von der tensoriellen Antwortfunktion ~K(~q) ausfaktorisiert wurde.
77
Tatsächlich sollte λL in dieser Diskussion durch eine verwandte Skala λ ersetzt werden, die Funktion von λL , ξ0
und ξ ist.
XIV. Makroskopische Aspekte der Supraleitung
141
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Im nicht-stationären Fall verallgemeinert sich die Beziehung (XIV.6) auf
~
˜
~˜ ~q),
µ0 J~S (ω, ~q) = −~K(ω, ~q) · A(ω,
(XIV.7)
mit einer Frequenz-abhängigen Antwortfunktion.
~ = ~0, entsprechend nach Fourier-Transformation ~q = ~0) Material gilt
In einem homogenen (∇
~
~ ~r) = − ∂ A(t, ~r) d.h. E(ω,
~˜ ~q = ~0) = iω A(ω,
~˜ ~q = ~0),
E(t,
∂t
so dass die Gl. (XIV.7) zur Relation
i~
˜
~˜ ~q = ~0),
µ0 J~S (ω, ~q = ~0) = ~K(ω, ~q = ~0) · E(ω,
ω
führt. Dies gibt für die elektrische Leitfähigkeit — oder genauer, für den Leitfähigkeitstensor
~
i~K(ω, ~q = ~0)
~
~σel. (ω) =
.
µ0 ω
~
Im einfachsten Fall nimmt ~K(ω, ~q = ~0) einen endlichen Wert im stationären Limes ω → 0 an, so dass
die Leitfähigkeit in diesem Limes divergiert, entsprechend gerade dem Phänomen der Supraleitfähigkeit.
Bei dem Meißner–Ochsenfeld-Effekt handelt es sich im Gegensatz um einen statischen Effekt —
entsprechend dessen Unterschied mit der Lenz-Regel — tief im Inneren des Supraleiters, der sich
also durch das Verhalten der Antwortfunktion für ω = 0 und |~q| → 0 beschreiben lässt. Dies wird
also durch
~
lim ~K(ω = 0, ~q) 6= 0
|~
q |→0
bestimmt. Interessanterweise können die für Supraleitfähigkeit und für den Meißner–OchsenfeldEffekt relevanten Grenzwerte der Antwortfunktion unterschiedlich sein, z.B. im Fall eines Gases von
freien Elektronen.
XIV.3 Ginzburg–Laudau-Theorie
Basierend auf der Landau-Theorie der Phasenübergänge, deren Grundlagen in Abschn. XIV.3.1
kurz vorgestellt werden, haben Ginzburg78 und Landau selber eine Theorie der Supraleitung entwickelt (Abschn. XIV.3.2).
XIV.3.1 Landau-Theorie der Phasenübergänge
Phasenübergänge sind oft charakterisiert durch die Brechung einer Symmetrie sowie durch die
Entstehung eines nichtverschwindenden Parameters, des Ordnungsparameters. Der Letztere ist null
in der einen, „ungeordneten“ Phase — entsprechend üblicherweise der Phase, die bei höheren Temperaturen stabil ist — und nicht-null in der anderen Phase, die „mehr Ordnung“ aufweist.
Ein Beispiel davon die Magnetisierung beim ferromagnetischen Phasenübergang. Unter der
Sprungtemperatur Tc nimmt diese Magnetisierung einen endlichen Wert, entsprechend der Ausrichtung von mikroskopischen Spins entlang einer bestimmten Achse. Oberhalb Tc wirkt die
thermische Bewegung der Neigung der Spins, sich auszurichten, entgegen, so dass die Magnetisierung null wird.
Um diese Phänomene zu reproduzieren hat Landau (1937) vorgeschlagen, die Taylor-Entwicklung
der freien Energie in Potenzen des Ordnungsparameters η zu betrachten:79
β(T ) 4
η + ···
(XIV.8)
F (η, T ) = F0 (T ) + α(T )η 2 +
2
78
Heute wird sein Namen in Deutsch eher als Ginsburg geschrieben, hier wird nichtsdestotrotz die englische Schreibweise benutzt.
79
Eine englische Übersetzung des originalen Artikels ist in Ukr. J. Phys. 53 (2008) 25–35 (special issue) zu finden.
XIV. Makroskopische Aspekte der Supraleitung
142
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Dabei können ungerade Potenzen oft aus Symmetrie- oder Analytizitätsgrunden ausgeschlossen
werden.
Wie immer ist die freie Energie im stabilen Zustand minimal. Führt man diese Minimierung bei
fester Temperatur durch, so findet man den Ordnungsparameter. Damit das Minimum von F (T, η)
für einen nicht-unendlichen Wert von η erreicht wird, soll β(T ) positiv sein.
Ist α(T ) auch positiv, so ist die freie Energie (XIV.8) minimal für η = 0, entsprechend der ungeordneten Phase. Für α(T ) < 0 wird
p das Minimum der freien Energie für einen endlichen Wert von η
erreicht — und zwar für η = ± −α(T )/β(T ) —, d.h. das System befindet sich in der geordneten
Phase. Die zugehörige freie Energie lautet
s
α(T )2
α(T )
F T, η = −
≡ Fη (T ) = F0 (T ) −
.
(XIV.9a)
β(T )
2β(T )
Natürlich ist diese freie Energie kleiner als F0 (T ), die die freie Energie der ungeordneten Phase bei
der gleichen Temperatur ist.
Daraus folgert man die Differenz der Entropien der geordneten und ungeordneten Phase
1 ∂ α(T )2
∂ Sη (T ) − S0 (T ) = −
,
(XIV.9b)
Fη (T ) − F0 (T ) =
∂T
2 ∂T β(T )
sowie die Differenz der Wärmekapazitäten
T ∂ 2 α(T )2
∂ Cη (T ) − C0 (T ) = T
Sη (T ) − S0 (T ) =
.
∂T
2 ∂T 2 β(T )
(XIV.9c)
Bemerkungen:
∗ Damit die Taylor-Entwicklung (XIV.8) Sinn macht, soll der Ordnungsparameter η klein sein, d.h.
die Landau-Theorie beschreibt nur die Physik in einer Nachbarschaft des Phasenübergangs. Zum
anderen treten bei kontinuierlichen Phasenübergängen Fluktuationen auf, die am kritischen Punkt
groß werden, so dass der Ordnungsparameter nicht mehr als klein betrachtet werden kann und
die Landau-Theorie bricht aus. Tatsächlich hat Ginzburg gezeigt, dass im Fall des supraleitenden
Phasenübergangs der Bereich um Tc , wo Fluktuationen wichtig sind, durch |T − Tc |/Tc . 10−12
gegeben ist: die Landau-Theorie bleibt also eine gute Beschreibung!
∗ In Gl. (XIV.8) werden nur die 2. und 4. Ordnung in η berücksichtigt, was fast automatisch — und
zwar mit den „minimalen Ansätzen“ (XIV.10a) für die Koeffizienten der Entwicklung — zu einem
Phasenübergang 2. Ordnung führt. Um Phasenübergänge 1. Ordnung zu beschreiben, betrachtet
man auch die Ordnung η 6 mit einem positiven Koeffizient, während der Koeffizient des Terms η 4
als negativ angenommen wird.
XIV.3.2 Ginzburg–Landau-Gleichungen
Eine fantastische Intuition von Ginzburg und Landau war, einen komplexwertigen Ordnungsparameter Ψ — der eine „effektive Wellenfunktion der supraleitenden Elektronen“ darstellt — für
die supraleitende Phase anzunehmen.
Hiernach wird die freie Energie in der supraleitenden bzw. „normalen“ Hoch-Temperatur-Phase
als FS (T ) bzw. FN (T ) bezeichnet.
XIV.3.2
a Supraleiter mit konstantem Ordnungsparameter in einem Null magnetischen Feld
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Um einen Phasenübergang bei der Temperatur Tc zu beschreiben, soll der Koeffizient α(T ) in
Gl. (XIV.8) sein Zeichen bei Tc ändern, während die einzige Bedingung für β(T ) einfach β(T ) > 0
ist. Die einfachsten Funktionen, die diese Forderungen erfüllen, sind
(
α(T ) = α0 × (T − Tc ), mit α0 > 0
(XIV.10a)
β(T ) ≡ β = Konstante.
XIV. Makroskopische Aspekte der Supraleitung
143
N.BORGHINI
Theoretische Physik IV
Elektrodynamik in Materie
Diese Annahmen führen für die freie Energie zu80
FS (Ψ, T ) = FN (T ) + α0 (T − Tc )|Ψ|2 +
β 4
|Ψ| + · · ·
2
(XIV.10b)
In der supraleitenden Phase mit T ≤ Tc ergibt sich dann
1/2 p
α0
Tc − T ,
|Ψ| =
β
d.h. [vgl. Gl. (XIV.9a)]
FS (Ψ, T ) − FN (T ) = −
α02
(T − Tc )2 .
2β
(XIV.11a)
Diese Differenz ist negativ, so dass die supraleitende Phase tatsächlich stabiler ist als die normale
Phase. Die zugehörige Entropiedifferenz ist [vgl. Gl. (XIV.11c)]
SS (T ) − SN (T ) =
α02
(T − Tc ).
β
(XIV.11b)
Insbesondere verschwindet die latente Wärme L ≡ T [SS (T ) − SN (T )] an der Sprungtemperatur, so
dass der Phasenübergang nicht erster Ordnung ist.81 Schließlich lautet die Differenz der Wärmekapazitäten an der Sprungtemperatur
CS (Tc ) − CN (Tc ) =
α02
Tc .
β
(XIV.11c)
Diese Differenz verschwindet nicht, d.h. die Wärmekapazität ist unstetig bei Tc .81
XIV.3.2
b Supraleiter mit räumlich variierendem Ordnungsparameter in einem Null Magnetfeld
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Ist der Ordnungsparameter nicht gleichförmig im Supraleiter, sondern ortsabhängig: Ψ(~r), so
treten weitere Terme proportional zu (Potenzen) dessen Gradienten in der freien Energie auf. Im
~ r) wichtig. Dann lautet die
Fall, wo Ψ(~r) langsam variiert, ist nur die niedrigste Ordnung in ∇Ψ(~
freie Energie im Supraleiter
Z 2 3
β
2
4
~
FS T, Ψ(~r) = FN (T ) +
α(T )|Ψ(~r)| + |Ψ(~r)| + γ(T ) ∇Ψ(~r) d ~r,
(XIV.12)
2
mit einem positiven Koeffizient γ(T ), damit die freie Energie FS minimal für einen gleichförmigen
Ordnungsparameter sei.
Dieses Minimum lässt sich durch Variation bezüglich die unabhängigen Variablen T , Ψ(~r) und
2 ∗
~ r) ∇Ψ
~ ∗ (~r) findet man durch partielle Integration,82 dass die
Ψ (~r) finden. Mit ~
∇Ψ(~r) = ∇Ψ(~
Forderung
δ FS T, Ψ(~r) − FN (T ) = 0
∗
δΨ (~r)
zur Bedingung
α(T )Ψ(~r) + β|Ψ(~r)|2 Ψ(~r) − γ(T )4Ψ(~r) = 0
(XIV.13a)
führt. Dies hat die Form einer nicht-linearen Schrödinger-Gleichung, insbesondere wenn man γ(T )
als ~2 /2m? schreibt:
~2
2
−
4 + β|Ψ(~r)| Ψ(~r) = −α(T )Ψ(~r).
(XIV.13b)
2m?
Genauer handelt es sich um die Eigenwertgleichung für eine stationäre Gross–Pitajewski-Gleichung,
d.h. eine verallgemeinerte Schrödinger-Gleichung für eine selbstwechselwirkende Wellenfunktion.
80
Hier sieht man, dass Terme ungerader Ordnung eine nicht-analytische freie Energie geben würden.
In der Ehrenfest-Klassifikation ist der Phasenübergang zweiter Ordnung, denn die erste Unstetigkeit tritt bei
einer zweiten Ableitung der freien Energie auf.
82
~
~ ∗ (~r) = ∇[Ψ
~ ∗ (~r)∇Ψ(~
~
~
Man schreibt z.B. ∇Ψ(~
r) ∇Ψ
r) − Ψ∗ (~r)4Ψ(~r) und argumentiert, dass Ψ∗ (~r)∇Ψ(~
r) an
den Wänden des Supraleiters verschwindet.
81
XIV. Makroskopische Aspekte der Supraleitung
144
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Für kleine Ordnungsparameter — entsprechend z.B. der Situation in der Nachbarschaft eines
Punkts, wo Ψ(~r) verschwindet — kann man Gl. (XIV.13b) linearisieren. Unter Verwendung von
α(T ) = −|α(T )| wenn T < Tc kommt
~2
4Ψ(~r) + Ψ(~r) = 0.
2m? |α(T )|
Somit ist eine typische Längenskala für die Variationen des Ordnungsparameters die Ginzburg–
Landau-Kohärenzlänge
~
ξ(T ) ≡ p
,
(XIV.14)
2m? |α(T )|
oder äquivalent ξ(T )2 = γ(T )/|α(T )|. Diese Kohärenzskala entspricht derjenigen, die in der PippardTheorie auftritt. Mit dem Ansatz (XIV.10a) für α(T ) gilt ξ(T ) ∝ (T − Tc )−1/2 .
XIV.3.2
c Supraleiter in einem magnetischen Feld
::::::::::::::::::::::::::::::::::::::::::::::::
Ist der Supraleiter jetzt in einem stationären äußeren magnetischen Feld, charakterisiert durch
~ r), so müssen dessen Beiträge zur freien Energie berücksichtigen:
die Flussdichte B(~
• Zum einen gibt es die Energie, die aus der Magnetisierung des Supraleiters entsteht. Diese
lautet
Z ~ 2
B(~r) 3
Eb =
d ~r.
(XIV.15)
2µ0
Hiernach werden die magnetischen Felder außerhalb des Materials mit ext. gekennzeich~ ext. lautet die
net, solche innerhalb des Materials ohne Index. In einem homogenen Feld B
Variation der magnetischen Energiedichte im supraleitenden Material
~ · dB
~ ext. = H
~ · d µ0 H
~ ext. ,
deb = H
~ ext. ersetzt wurde. Ist keine Stromwobei die äußere Flussdichte (im Vakuum) durch µ0 H
~ =H
~ ext..
dichte vorhanden, so ist die Feldstärke stetig an der Oberfläche des Materials d.h. H
Die Integration von Null bis zu einem endlichen Wert des Feldes gibt dann für die (lokale)
~ 2 = µ0 H
~ 2 , woraus Gl. (XIV.15) sofort folgt.
Energiedichte µ0 H
ext.
• Zum anderen soll der Gradient in Gl. (XIV.12) durch einen eichkovarianten Gradienten83
ersetzt werden:
?
~ r),
~ →∇
~ + iq A(~
∇
~
~ r) das Vektorpotential bezeichnet. Dabei ist q ? die effektive Ladung des Teilchens,
wobei A(~
dessen Wellenfunktion der Ordnungsparameter darstellt.
In einem magnetischen Feld ist der kanonische Impuls einer Punktladung q nicht gleich
~ = p~ + q A(~
~ r) gegeben, vgl. Gl. (VIII.7). Dazu
deren kinetischen Impuls p~, sondern durch Π
~ und dem kanonischen Impuls verwendet.
wird die Korrespondenz zwischen −i~∇
Insgesamt wird Gl. (XIV.12) also ersetzt durch
~ r) − FN (T ) =
FS T, Ψ(~r), A(~
2
Z ~ r)2 β
q? ~
B(~
2
4
~
d3~r.
α(T )|Ψ(~r)| + |Ψ(~r)| + γ(T ) −i ∇ + A(~r) Ψ(~r) +
2
~
2µ0
(XIV.16)
Im Gleichgewichtszustand bei gegebener Temperatur ist die freie Energie des Supraleiters oder
~ r).
äquivalent die Differenz (XIV.16) minimal unter Variationen von Ψ(~r), Ψ∗ (~r) und A(~
~ r) → A(~
~ r) − ∇χ(~
~ r) tranformiert sich die Wellenfunktion Ψ(~r) für ein Teilchen der
In einer Eichtransformation A(~
iqχ(~
r )/~
~
~
Ladung q in Ψ(~r) e
. Dann ist [−i~∇ + q A(~r)]Ψ(~r) eichinvariant.
83
XIV. Makroskopische Aspekte der Supraleitung
145
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Zunächst führt die Forderung der Invarianz unter kleine Variationen δΨ∗ (~r) zur Bedingung
2
?
q
2
~ + A(~
~ r) Ψ(~r) = 0.
α(T )Ψ(~r) + β|Ψ(~r)| Ψ(~r) + γ(T ) −i ∇
(XIV.17a)
~
Diese Gleichung entspricht natürlich dem Ersetzen des Gradienten durch dessen eichkovariante
~ r) unter
Version in Gl. (XIV.13a). Dann liefert die Minimierung der freien Energie bezüglich A(~
~
~
~
Verwendung von ∇ × B(~r) = µ0 Js (~r) die zweite Gleichung
?2 2q ? γ ∗ ~
~ ∗ (~r) − q γ Ψ(~r)2 A(~
~ r).
J~s (~r) =
Ψ (~r) ∇Ψ(~r) − Ψ(~r) ∇Ψ
i~
~2
(XIV.17b)
Die Gleichungen (XIV.17a) und (XIV.17b) werden als Ginzburg–Landau-Gleichungen bezeichnet.
~2
Mit γ(T ) ≡
lassen sie sich umschreiben als
2m?
2
iq ? ~
~2 ~
∇+
A(~r) Ψ(~r) + α(T )Ψ(~r) + β|Ψ(~r)|2 Ψ(~r) = 0
(XIV.18a)
−
2m?
~
und
?2 q?~ ∗ ~
~ r).
~ ∗ (~r) − q Ψ(~r)2 A(~
(XIV.18b)
J~s (~r) =
Ψ
(~
r
)
∇Ψ(~
r
)
−
Ψ(~
r
)
∇Ψ
?
?
2im
m
Diese Gleichungen sind die gleichen, wie für ein Teilchen mit Masse m? und Ladung q ? , beschrieben
durch die Wellenfunktion Ψ(~r).
XIV.3.3 Folgerungen der Ginzburg–Landau-Gleichungen
XIV.3.3
a Homogene Lösungen
:::::::::::::::::::::::::::::::
Sucht man nach gleichförmigen Lösungen der Gl. (XIV.18b) mit Null-Stromdichte, so ergibt sich
~ = ~0, entsprechend der supraleitenden Phase, oder |Ψ|2 = 0, entsprechend der normalen
entweder A
Phase.
Für den ersteren Fall führt dann Gl. (XIV.18a) zum schon gefundenen Gleichgewichtswert
s
−α(T )
|Ψ| =
(XIV.19)
β
des Ordnungsparameters.
XIV.3.3 b Längenskalen
Neben der schon gefunden Kohärenzlänge ξ(T ), Gl. (XIV.14), besitzen die Ginzburg–LandauGleichungen eine zweite charakteristische Längenskala. Wenn man die Annahme eines Ordnungsparameters mit konstantem Betrag macht,
::::::::::::::::::::::::
Ψ(~r) = Ψ0 eiϕ(~r)
mit Ψ0 ∈ R,
(XIV.20)
so lautet die supraleitende Stromdichte
q?~ 2 ~
q? ~
~
JS (~r) = ? Ψ0 ∇ϕ(~r) − A(~r) .
m
~
(XIV.21)
Bildet man die Rotation, so spielt der erste Term in den eckigen Klammern keine Rolle, und man
findet die London-Theorie wieder, mit der Identifikation
ne,S e2
q?2
= ? Ψ20 ,
me
m
d.h. für die London-Eindringtiefe
s
λL = c
XIV. Makroskopische Aspekte der Supraleitung
0 m?
.
q ? 2 Ψ20
(XIV.22)
146
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Nimmt Ψ0 den Gleichgewichtswert (XIV.19), mit dem Ansatz (XIV.10a), so ergibt sich
s
0 m? β
λL (T ) = c
∝ (T − Tc )−1/2 .
q ? 2 |α(T )|
(XIV.23)
Der Ginzburg–Landau-Parameter wird definiert als das Verhältnis von der Kohärenzlänge zur
Eindringstiefe
λL (T )
m? c p
κ≡
=
20 β.
(XIV.24)
ξ(T )
~q ?
Dabei konnte Abrikosow zeigen, dass der Supraleiter sich wesentlich unterschiedlich
verhält, ob κ
√
kleiner oder größer
als
einen
bestimmten
Wert
ist.
Genauer
ist
für
κ
<
1/
2
der
Supraleiter
vom
√
Typ I, für κ > 1/ 2 vom Typ II.
XIV.3.3
c Quantisierung des magnetischen Flusses durch einen Ring
::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Im Rahmen der Ginzburg–Landau-Theorie lässt sich ein Phänomen einfach erklären, und zwar
die Quantisierung des magnetischen Flusses durch einen supraleitenden Ring — die tatsächlich
schon durch F.London (1950) lange vor den ersten Messungen [43, 44] vorhergesagt wurde.
Sei C eine Kontour tief im Inneren eines dicken ringförmigen Supraleiters, in dem kein elektrischer Strom fließt. Es wird angenommen, dass der Betrag des Ordnungparameters den Gleichgewichtswert (XIV.19) annimmt, während dessen Phase variieren kann. Dann ist die supraleitende
Stromdichte durch Gl. (XIV.21) gegeben, so dass deren Zirkulation entlang der Kontour lautet
I
I
I
q?~ 2
q?
~
~
~
~
~ r) · d~`
JS (~r) · d` = ? Ψ0
∇ϕ(~r) · d` −
A(~
m
~
C
C
C
d.h.
q?~ 2
q?
0 = ? Ψ0 2nπ~ − ΦB~
m
~
mit n ∈ N. Somit genügt der magnetische Fluss ΦB~ durch die durch C abgegrenzte Fläche automatisch der Quantisierungsbedingung
2π~
ΦB~ = ? n.
q
Messungen der möglichen Werte dieses Flusses liefern dann die effektive Ladung q ? der Ladungsträger, die für Supraleitfähigkeit verantwortlich sind. In der Tat misst man
ΦB~ = nΦ0
mit Φ0 ≡
h
= 2, 0678 · 10−15 Wb
2e
dem Flussquant. Dies entspricht |q ? | = 2|e|, mit e der Elementarladung, und zeigt, dass Supraleitfähigkeit durch Elektronpaare vermittelt wird — in Übereinstimmung mit der BCS-Theorie.
Literatur
• Landau–Lifschitz Band VIII [4], Kapitel VI § 53–55 & Band IX [45] Kapitel V § 44–45 & 52–53.
XIV. Makroskopische Aspekte der Supraleitung
147
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
Literaturverzeichnis
[1] G. Russakoff, Am. J. Phys. 38 (1970) 1188–1195.
[2] H. A. Lorentz, Proc. Roy. Neth. Acad. Arts Sci. 5 (1902) 254–266.
[3] W. Demtröder, Experimentalphysik 2 : Elektrizität und optik , 2. Aufl. (Springer, Berlin & Heidelberg, 2009).
[4] L. Landau, E. Lifschitz, Lehrbuch der theoretischen Physik. Band VIII : Elektrodynamik der
Kontinua, 7. Aufl. (Harri Deutsch, Frankfurt am Main, 1991).
[5] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume II :
Mainly Electromagnetism and Matter , definitive Aufl. (Addison Wesley, Reading, 2005).
[6] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 2 : Elektromagnetismus und Struktur der Materie, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München,
2007).
[7] D. J. Griffiths, Elektrodynamik : Eine Einführung, 3. Aufl. (Pearson, München, 2011).
[8] J. D. Jackson, Classical electrodynamics, 3. Aufl. (John Wiley & Sons, New York, 1999).
[9] C. R. Smith, R. Inguva, Am. J. Phys. 52 (1984) 27–34.
[10] J. Schwinger, L. L. DeRaad, Jr., K. A. Milton, W.-y. Tsai, Classical electrodynamics (Perseus,
Reading, MA, 1998).
[11] R. P. Feynman, R. B. Leighton, M. Sands, The Feynman Lectures on Physics. Volume I : Mainly
Mechanics, Radiation, and Heat, definitive Aufl. (Addison Wesley, Reading, 2005).
[12] R. P. Feynman, R. B. Leighton, M. Sands, Feynman-Vorlesungen über Physik. Band 1 : Mechanik, Strahlung, Wärme, 5. Aufl. (Oldenbourg Wissenschaftsverlag, München, 2007).
[13] H. M. Nussenzveig, Causality and dispersion relations, 1. Aufl. (Academic Press, New York &
London, 1972).
[14] B. Y.-K. Hu, Am. J. Phys. 57 (1989) 821.
[15] A. Bers, Am. J. Phys. 68 (2000) 482–484.
[16] A. Sommerfeld, Ann. Phys. (Leipzig) 44 (1914) 177–202.
[17] L. Brillouin, Ann. Phys. (Leipzig) 44 (1914) 203–240.
[18] S. Zhang et al., Phys. Rev. Lett. 106 (2011) 243602.
[19] V. G. Veselago, Sov. Phys. Uspekhi 10 (1968) 509–514 [Usp. Phys. Nauk 92 (1967) 517–526].
[20] K. T. McDonald, Doubly negative metamaterials, 2010.
[21] D. R. Smith et al., Phys. Rev. Lett. 84 (2000) 4184–4187.
[22] R. A. Shelby, D. R. Smith, S. Schultz, Science 292 (2001) 77–79.
[23] G. Dolling, M. Wegener, C. M. Soukoulis, S. Linden, Opt. Lett. 32 (2007) 53–55.
[24] J. B. Pendry, Phys. Rev. Lett. 85 (2000) 3966–3969.
XIV. Makroskopische Aspekte der Supraleitung
148
N.BORGHINI
Elektrodynamik in Materie
Theoretische Physik IV
[25] A. Grbic, G. V. Eleftheriades, Phys. Rev. Lett. 92 (2004) 117403.
[26] K. T. McDonald, Am. J. Phys. 68 (2000) 293–294.
[27] L. V. Hau, S. E. Harris, Z. Dutton, C. H. Behroozi, Nature 397 (1999) 594–598.
[28] K. T. McDonald, Am. J. Phys. 69 (2001) 607–614.
[29] A. M. Steinberg, R. Y. Chiao, Phys. Rev. A 49 (1994) 2071–2071.
[30] L. J. Wang, A. Kuzmich, A. Dogariu, Nature 406 (2000) 277–279.
[31] A. Sommerfeld, Vorlesungen über theoretische Physik. Band IV : Optik , 3. Aufl. (Harri Deutsch,
Frankfurt am Main, 1989).
[32] N. Meyer-Vernet, Am. J. Phys. 61 (1993) 249–257.
[33] L. Landau, E. Lifschitz, L.P.Pitajewski, Lehrbuch der theoretischen Physik. Band X : Physikalische Kinetik , 2. Aufl. (Harri Deutsch, Frankfurt am Main, 1991).
[34] D. van Delft, P. Kes, Phys. Today 63 (Oct. 2010) 38–43.
[35] J. File, R. G. Mills, Phys. Rev. Lett. 10 (1963) 93–96.
[36] V. L. Ginzburg, Rev. Mod. Phys. 76 (2004) 981–998.
[37] E. Maxwell, Phys. Rev. 78 (1950) 477.
[38] C. A. Reynolds, B. Serin, W. H. Wright, L. B. Nesbitt, Phys. Rev. 78 (1950) 487.
[39] W. Meissner, R. Ochsenfeld, Naturwiss. 21 (19933) 787–788.
[40] A. Abrikosov, Rev. Mod. Phys. 76 (2004) 975–979.
[41] F. London, H. London, Proc. Roy. Soc. London A 149 (1935) 71–88.
[42] A. B. Pippard, Proc. Roy. Soc. London A 216 (1953) 547–568.
[43] B. S. Deaver, Jr., W. M. Fairbank, Phys. Rev. Lett. 7 (1961) 43–46.
[44] R. Doll, M. Näbauer, Phys. Rev. Lett. 7 (1961) 51–52.
[45] L. Landau, E. Lifschitz, Lehrbuch der theoretischen Physik. Band IX : Statistische Physik. Teil
II , 4. Aufl. (Harri Deutsch, Frankfurt am Main, 1992).
149