Analoge Schaltungstechnik Labor
Werbung

ANALOGE
SCHALTUNGSTECHNIK
LABOR
Institut für Elektronik der Technischen Universität in Graz
AD/DA-Umsetzer (1, 2)
Übungsinhalt:
• Messungen an A/D- und D/A-Umsetzern
Vorausgesetzte Kenntnisse:
• Übungsunterlagen
Literatur:
• Vorlesungsunterlagen Elektronische Schaltungstechnik 2
• U. Tietze Ch. Schenk
Halbleiterschaltungstechnik
AD1/AD2 – 1 / 22
1
1.1
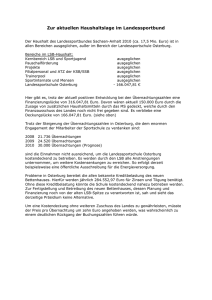
Analog/Digital-Umsetzer
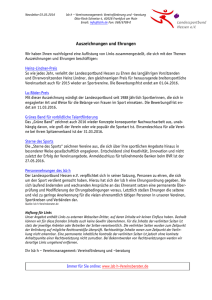
Aufgabe eines A/D-Umsetzers
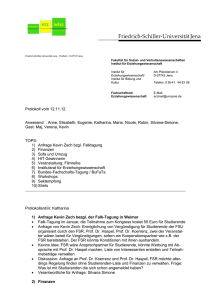
Ein A/D-Umsetzer misst das Verhältnis einer analogen Eingangsgröße zu einer Referenzgröße
und gibt dieses in Form eines digitalen Wortes an. Dazu wird der mögliche Bereich der
Eingangsgröße in n gleich große Intervalle zerlegt und festgestellt, welchem Intervall die
Eingangsgröße zuzuordnen ist (Abbildung 1).
a
d
binär dezimal
a1
∆a
{
111
7
110
6
101
5
Der analoge Eingang
100
4
a0 < a < a1
011
3
010
2
wird auf eines der 8 möglichen
Kodewörter abgebildet. Die
Auflösung N ist 3 bit (N = 3 = ld 8)
001
1
000
0
a0
Quantisierung
Inkrement des Umsetzers:
∆a = a1/n = a1/2N
a1 ist häufig die
Referenzgröße
Kodierung
Abbildung 1: Umsetzerkennlinie
Die Umsetzung besteht somit grundsätzlich aus zwei Schritten:
Quantisieren und Kodieren. Man beachte, dass durch die Quantisierung ein Informationsverlust
entsteht, der nicht mehr rückgängig gemacht werden kann (Quantisierungsfehler).
Bei einem A/D-Umsetzer mit z.B. n = 8 Quantisierungsintervallen wird die Eingangsgröße durch
eines von 8 möglichen Codewörtern abgebildet. In diesem Fall hat der Umsetzer eine Auflösung
von:
N = ld n = 3 bit.
Oder: Bei N Bit Auflösung ergeben sich 2N Quantisierungsintervalle. Die analoge Größe des
LSB (Least Significant Bit, niederwertigstes Bit) errechnet sich aus der Auflösung und dem
vollen Eingangsbereich (FSR = Full Scale Range), d.i. die Differenz zwischen dem maximalen
und dem minimalen Eingangswert, nach der Formel:
1 LSB =
FSR
.
2N
Eine ebenfalls gebräuchliche Definition bezeichnet die Auflösung als die kleinste Änderung des
Eingangswertes, die der A/D-Umsetzer noch unterscheiden kann (kleinstmöglicher
Quantisierungsschritt, 1 LSB analog).
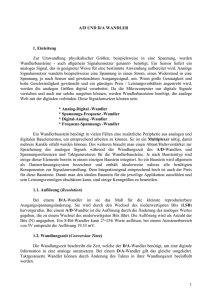
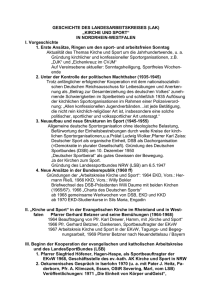
Der Ausgangscode eines A/D-Umsetzers ändert sich erst dann, wenn sich die Eingangsgröße um
den Betrag ±1/2 LSB, gerechnet von der Mitte des Quantisierungsintervalls, geändert hat. Die
Ausgabe 2002
AD1/AD2 – 2 / 22
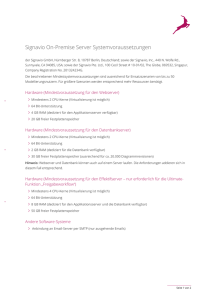
Umsetzerkennlinie (Abbildung 2) ist also eine Treppenfunktion, die angenähert als eine durch
Null und den positiven Endwert (plus full scale) des Umsetzers verlaufende Gerade dargestellt
werden kann (ideale Kennlinie).
Zusammenhänge bei einem idealen A/D-Umsetzer
1
DIGITALER AUSGANG
(Kode und Bruchteil)
Idealer Übergang
7/8
111
6/8
110
5/8
101
4/8
100
3/8
011
2/8
010
1/8
001
Nominell quantisierter Wert
(+- 1/2 LSB)
1 LSB
Ideal umgesetzter
analoger Eingang
0
0
1/8
2/8
3/8
4/8
5/8
6/8
7/8
1/8
2/8
3/8
4/8
5/8
6/8
7/8
000
0
FSR
ANALOGER EINGANG
Abbildung 2: Ideale A/D-Umsetzerkennlinie
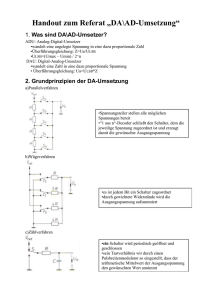
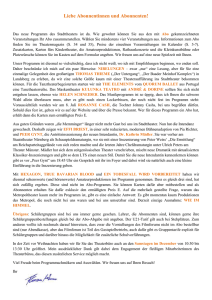
Bei bipolarem Betrieb verläuft die Gerade durch den positiven und den negativen Endwert
(minus full scale). Null bzw. der negative Endwert ist der analoge Eingangswert, der 1/2 LSB
unter dem Wert liegt, der die erste Änderung des Codes am Ausgang (von 000...00 auf 000...01)
bewirkt. Der positive Endwert liegt 3/2 LSB über dem Eingangswert, der den letzten
Codewechsel (von 111...10 zu 111...11) hervorruft. Abbildung 3 zeigt die Kennlinie eines
idealen bipolaren A/D-Umsetzers mit COB-Code (Complementary Offset Binary Code)
Ausgang.
Ausgabe 2002
AD1/AD2 – 3 / 22
Alle Bit gesetzt
000...000
DIGITAL AUSGANG - COB Code
COB:
Complementary
Offset Binary
Verstärkungsfehler
- 1/2 LSB
011...111
+ 1/2 LSB
Offsetfehler
111...111
Alle Bit gelöscht
- FSR/2
ANALOG EINGANG
0
+ FSR/2 - 1 LSB
Abbildung 3: Übertragungskennlinie eines idealen bipolaren A/D-Umsetzters
1.2
Genauigkeit von A/D-Umsetzern
Unter diesem Oberbegriff lassen sich die typischen Umsetzerfehler zusammenfassen.
Nachfolgend werden die grundlegenden Fehler von A/D-Umsetzern näher betrachtet.
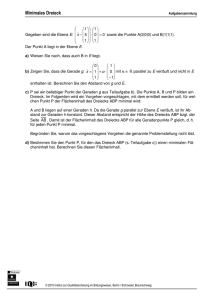
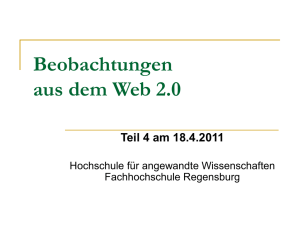
1.2.1 Offsetfehler (Nullpunktfehler)
Der Offsetfehler ist als die Abweichung der tatsächlichen Übertragungsfunktion von der idealen
Kennlinie im Nullpunkt der analogen Eingangsgröße definiert. Er tritt als konstanter absoluter
Genauigkeitsfehler für jeden Punkt der Übertragungsfunktion auf (Abbildung 4) und kann daher
abgeglichen werden.
Eine andere Definition lautet:
Bezeichnet man als Offset die Eingangsgröße, die den ersten Codewechsel am Ausgang eines
A/D-Umsetzers verursacht , dann ist der Offsetfehler die Differenz zwischen dem realen und
dem idealen Übergangswert.
Liegt der Eingangsbereich zwischen Null und einem positiven Endwert (unipolarer Betrieb),
sollte bei einem idealen Umsetzer ein analoger Eingangswert von 1/2 LSB über Null den ersten
Codewechsel bewirken. Bei bipolarem Betrieb, bei dem sich der Umsetzerbereich von einem
negativen bis zu einem positiven Endwert erstreckt, sollte der erste Wechsel bei einem
Eingangswert erfolgen, der 1/2 LSB über dem negativen Endwert liegt.
Zur Unterscheidung der beiden Betriebsfälle werden auch die Begriffe unipolarer bzw. bipolarer
Offsetfehler verwendet.
1.2.2 Verstärkungsfehler
Die Kennlinie eines idealen A/D-Umsetzers weist bei einer sinnvollen Darstellung eine Steigung
von 45° auf. Ein Verstärkungsfehler (Skalierungsfehler) bewirkt eine von 45° abweichende
Steigung der realen Übertragungsfunktion (Abbildung 4). Seine Größe wird als Differenz
Ausgabe 2002
AD1/AD2 – 4 / 22
zwischen dem realen und dem idealen analogen Eingangswert ermittelt, der jeweils den letzten
Wechsel des Ausgangscodes (in Abbildung 4 auf 111) verursacht. Der ideale Wert liegt 3/2 LSB
unter dem nominalen positiven Skalenendwert (FSR). Ein eventuell vorhandener Offsetfehler ist
vorher abzugleichen. Der Verstärkungsfehler beeinflusst die Werte um denselben prozentualen
Betrag und kann, wie der Offsetfehler, abgeglichen werden.
Verstärkungsfehler
in %
Idealer
Umsetzter
Umsetzer mit Offsetund
Verstärkungsfehler
111
DIGITALER AUSGANG
110
101
Umsetzer
mit
Offsetfehler
100
011
010
001
000
0
1/8
Offsetfehler
2/8
3/8
4/8
5/8
6/8
7/8
FSR
ANALOGER EINGANG
Abbildung 4: A/D-Umsetzer Genauigkeit
1.2.3 Linearitätsfehler
Der (integrale) Linearitätsfehler eines A/D-Umsetzers ist die Abweichung seiner realen
Übertragungsfunktion von der idealen Kennlinie. Er wird im allgemeinen in LSB (analoger
Wert) angegeben.
Es bestehen grundsätzlich zwei Möglichkeiten, die Größe des Linearitätsfehlers zu bestimmen.
Bei der 1. wird davon ausgegangen, dass der Offset- und der Verstärkungsfehler so abgeglichen
sind, dass die Endpunkte der realen und der idealen Kennlinie übereinstimmen (EndpunktDefinition).
Bei der zweiten, seltener benutzten Möglichkeit erhält man durch Manipulation des Steigungsund/oder des Offsetfehlers eine im Hinblick auf den maximalen Linearitätsfehler optimale
Bezugsgerade (best straight line) oder eine möglichst gute Annäherung der realen an die ideale
Übertragungsfunktion (,,best-fit“-Form).
Der integrale Linearitätsfehler kann nicht abgeglichen werden.
1.2.4 Differenzielle Nichtlinearität (DNL)
Unter diesem Begriff erfasst man den Betrag der Abweichung jedes Quantisierungsergebnisses
von seinem theoretischen idealen Wert.
Ausgabe 2002
AD1/AD2 – 5 / 22
Anders ausgedrückt, die differenzielle Nichtlinearität ist die analoge Differenz zwischen zwei
benachbarten Codes von ihrem idealen Wert (1 LSB; weitere Bezeichnungen: Codebreite oder
,,quantum“). In Abbildung 5 zeigen die beiden ersten Quantisierungsschritte ein ideales
Verhalten. Der nächste Schritt beträgt statt 1 LSB (DNL = 0) nur 1/2 LSB, d.h. er ist um 1/2 LSB
zu klein (DNL = - 1/2 LSB). Der darauffolgende 3/2 LSB-Schritt ist dagegen um 1/2 LSB zu
groß (DNL = + 1/2 LSB).
Diese beiden Schritte kennzeichnen den Bereich, der für eine spezifizierte differenzielle
Nichtlinearität von ± 1/2 LSB gerade noch zulässig ist.
Man beachte, dass integrierende A/D-Umsetzer funktionsbedingt gleichförmige Codebreiten
haben, die sich nur langfristig merklich ändern können.
Die differenzielle Nichtlinearität kann nicht abgeglichen werden.
111
Digital-Ausgang
110
101
100
011
Q
2
010
3Q
+ 1/2 DNL
2
- 1/2 DNL
Q
001
0
Q = FSR/2N
1/8
3/8
5/8
Analog-Eingang
7/8 FSR
FS = FSR - 1 LSB
Abbildung 5: Differenzielle Nichtlinearität
1.2.5 Monotonie, fehlendes Codewort (missing code)
Der Definition nach ist ein A/D-Umsetzer dann monoton, wenn die Wertigkeit seines
Ausgangscodes mit stetig steigender Eingangsgröße ebenfalls stetig steigt.
Ist die differenzielle Nichtlinearität eines A/D-Umsetzers größer als ± 1 LSB, so ist ein
monotoner Betrieb dieses Umsetzers nicht gewährleistet. Mit Sicherheit arbeiten die Umsetzer
monoton, die über eine differenzielle Nichtlinearität verfügen, die kleiner oder gleich 1 LSB ist
(Abbildung 6).
(b)
nichtmonotone Umsetzung
111
111
110
110
Digital-Ausgang
Digital-Ausgang
(a)
monotone Umsetzung
101
100
011
101
100
011
010
010
001
001
0
1/8
3/8
Analog-Eingang
5/8
7/8 FSR
FS = FSR - 1 LSB
0
1/8
3/8
Analog-Eingang
5/8
7/8 FSR
FS = FSR - 1 LSB
Abbildung 6: Monotonie der A/D-Umsetzung
Ausgabe 2002
AD1/AD2 – 6 / 22
Die Bedingung, dass kein möglicher Code übersprungen wird, verlangt eine differenzielle
Nichtlinearität von kleiner 1 LSB. Ist der Fehler größer oder gleich 1 LSB, so ist zu erwarten,
dass bei der Umsetzung fehlende Codes (missing codes) auftreten (Abbildung 7).
(b)
fehlender Code
111
111
110
110
Digital-Ausgang
Digital-Ausgang
(a)
kein fehlender Code
101
100
011
101
100
011
010
010
001
001
0
1/8
3/8
Analog-Eingang
5/8
0
7/8 FSR
FS = FSR - 1 LSB
Code fehlt
1/8
3/8
Analog-Eingang
5/8
7/8 FSR
FS = FSR - 1 LSB
Abbildung 7: Fehlender Code bei der A/D-Umsetzung
1.2.6 Quantisierungsfehler
Wie in Kapitel 1.1 bereits erwähnt wurde, haftet A/D-Umsetzern ein Quantisierungsfehler von
± 1/2 LSB an. Dieser Fehler ist eine grundsätzliche Eigenschaft des Quantisierungsprozesses und
kann nicht beseitigt werden. Seine Auswirkungen werden oft als Quantisierungsrauschen
bezeichnet.
1.2.7 Umsetzfehler
Jeder A/D-Umsetzer benötigt eine endliche, von der Schaltungsart und dem Umsetzverfahren
bestimmte Umsetzzeit (Öffnungszeit). Ändert sich während dieser Zeit das Eingangssignal,
entsteht bei der A/D-Umsetzung ein Fehler, der entweder als Amplituden- oder als Zeitfehler
aufgefasst werden kann (Abbildung 8).
V
V(t)
∆V = tA dV
dt
∆V = Umsetzfehler
tA
tA = Umsetzzeit
t
Abbildung 8: Umsetzfehler
Anmerkung:
Die in den Übungsunterlagen gemachten Angaben über digitale Codes beziehen sich, soweit
nicht besonders darauf hingewiesen wird, auf den natürlichen Binärcode.
Ausgabe 2002
AD1/AD2 – 7 / 22
2 Digital/Analog-Umsetzer
2.1
Aufgabe eines D/A-Umsetzers
Ein D/A-Umsetzer erzeugt eine analoge Abbildung einer digital dargestellten Zahl in der Art,
dass eine Referenzgröße mit einem entsprechenden Faktor gewichtet wird.
So liefert z.B. ein n-bit D/A-Umsetzer an dessen Eingang ein binär kodierter Spannungswert m
(0 <= m < 2n) liegt mit Hilfe einer Referenzspannung Vref eine analoge Ausgangsspannung
V = Vref
Der Faktor
m
2n
(1)
m
lässt sich in die folgende Form bringen:
2n
m
1
= n (B1 2 n −1 + B2 2 n −2 + ... + Bn 2 0 )
n
2
2
d.h.
B
B B
V = Vref 11 + 22 + ... + nn
2
2
2
(2)
Der Wert B kann dabei nur 1 oder 0 sein, je nachdem, ob das betreffende Bit gesetzt ist oder
nicht.
Eine Referenzspannung, die dem nominellen Endwert (nomineller voller Ausgangsspannungsbereich) VFSR (FSR = Full Scale Range) des Umsetzers entspricht, ermöglicht eine maximale
Ausgangsspannung UFS, die durch die Beziehung beschrieben wird:
1
V( B1 ... Bn =1) = VFS = VFSR 1 − n
2
(3)
Das bedeutet, dass der ideale maximale Skalenendwert (FS = Full Scale) immer um den
Bruchteil kleiner als der nominelle Endwert (FSR) ist (d.h.:FS=FSR-1 LSB).
Wie aus Gleichung (2) hervorgeht, setzt sich die Ausgangsspannung eines D/A-Umsetzers aus
einer Serie von diskreten Spannungen zusammen, wobei zwischen jedem Spannungswert und
dem digitalen Eingangscode ein direkter Zusammenhang besteht. Die korrespondierenden
Spannungswerte liegen auf einer Geraden, die der idealen Übertragungsfunktion des D/AUmsetzers entspricht.
2.1.1 Auflösung
Als Auflösung bezeichnet man einerseits die kleinste Änderung, die sich nach dem Setzen des
niederwertigsten Bits (Least Significant Bit = LSB) am Ausgang eines D/A-Umsetzers unter
idealen Bedingungen einstellt. Um für die Auflösung eine dimensionslose Größe zu erhalten,
lässt sich andererseits die Beziehung
1
Auflösung = n
2
aufstellen. Damit kann der analoge Wert des LSB berechnet werden:
1 LSB =
FSR
2n
Ausgabe 2002
AD1/AD2 – 8 / 22
In den meisten Fällen wird die Auflösung eines D/A-Umsetzers durch die Anzahl n der Bits
seines Eingangscodes ausgedrückt (n-bit D/A-Umsetzer).
2.2
Statische Genauigkeit von D/A-Umsetzern
Die statische Genauigkeit eines D/A-Umsetzers kann durch die Angabe der folgenden vier
Umsetzer-Fehler vollständig beschrieben werden.
2.2.1 Offsetfehler, Nullpunktsfehler
Ergibt sich bei einem digitalen Eingangscode, der den analogen Wert Null verlangt, ein anderer
Ausgangswert, bezeichnet man seine Abweichung von Null als Nullpunktsfehler (unipolarer
Betrieb). Er ist an jedem möglichen Punkt der Übertragungsfunktion dieser additiv mit gleichem
Betrag und gleichem Vorzeichen überlagert und kann abgeglichen werden. Bei einem bipolaren
D/A-Umsetzer tritt ein Offsetfehler am negativen Skalenendwert auf, während der
Nullpunktsfehler normalerweise mit dem Code 100…00 (MSB = Most Significant Bit gesetzt)
bestimmt wird.
In vielen Fällen wird allerdings, vor allem bei unipolaren Umsetzern, nicht zwischen dem Offsetund dem Nullpunktsfehler unterschieden (Abbildung 9).
7/8
Analog-Ausgang
6/8
5/8
4/8
3/8
2/8
1/8
Offsetfehler
0
001 010 011 100 101 110 111
Digital-Eingang
Abbildung 9: D/A-Umsetzer Offsetfehler
2.2.2 Verstärkungsfehler
Der Verstärkungsfehler (gain error) ist die Abweichung der realen von der idealen
Übertragungsfunktion im Skalenendwert (FS), hervorgerufen durch eine unterschiedliche
Steigung der beiden Kurven. Der Offsetfehler bleibt dabei unberücksichtigt.
Bei sinnvoller Darstellung beträgt die Steigung der idealen Transferfunktion k = 1. Ist die
Steigung der realen Übertragungsfunktion flacher, wird der Verstärkungsfehler negativ, ist sie
steiler, wird er positiv. Um die Größe des Verstärkungsfehlers zu bestimmen, muss bei
unipolaren D/A-Umsetzern die reale Übertragungsfunktion im Nullpunkt, bei bipolaren
Umsetzern exakt am negativen Skalenendwert beginnen (d.h. Offsetfehler abgleichen!). Bei
bipolaren D/A- Umsetzern erzeugt der Verstärkungsfehler einen zusätzlichen Nullpunktsfehler.
Der Verstärkungsfehler beeinflusst alle Ausgangswerte mit demselben prozentuellen Wert und
ist, ebenso wie der Offsetfehler, abgleichbar (Abbildung 10).
Ausgabe 2002
AD1/AD2 – 9 / 22
7/8
Verstärkungsfehler
Analog-Ausgang
6/8
5/8
4/8
3/8
2/8
1/8
0
001 010 011 100 101 110 111
Digital-Eingang
Abbildung 10: D/A-Umsetzer Verstärkungsfehler
2.2.3 Linearitätsfehler
Der (integrale) Linearitätsfehler (integrale Nichtlinearität, INL) ist ein Maß für die Abweichung
der analogen Werte von einer Geraden. Diese Gerade kann entweder eine Ausgleichsgerade sein,
die empirisch durch Manipulation des Verstärkungs- und/oder des Offsetfehlers so bestimmt
wird, dass die maximalen positiven und negativen Abstände der Messpunkte der realen
Transferkurve zu ihr gleich groß sind (best straight line, Ausgleichsgerade) oder eine Gerade
durch die beiden Endpunkte der realen Kurve (Endpunktabgleich), nachdem Offset- und
Verstärkungsfehler abgeglichen wurden (ideale Kennlinie). Die integrale Nichtlinearität wird
(überwiegend) in Vielfachen bzw. in Bruchteilen von 1 LSB angegeben.
In Abbildung 11 sind die Übertragungsfunktionen von nichtidealen D/A-Umsetzern mit
entsprechenden integralen Linearitätsfehlern aufgezeichnet. Abbildung 12 zeigt die beiden Arten,
Linearitätsfehler zu bestimmen.
7/8
Analog-Ausgang
6/8
Bit 2
1/2 LSB zu hoch
5/8
4/8
3/8
2/8
1/8
0
001 010 011 100 101 110 111
Digital-Eingang
Abbildung 11: D/A-Umsetzer Linearitätsfehler
Ausgabe 2002
AD1/AD2 – 10 / 22
(a)
INL-Bestimmung mit Ausgleichsgerade
(b)
INL-Bestimmung mit Endpunktabgleich
Endpunktabgleich
Verstärkungsfehler
7/8
7/8
6/8
5/8
5/8
4/8
Analog-Ausgang
Analog-Ausgang
Ausgleichsgerade
6/8
Nichtlinearität
< 1/2 LSB
3/8
2/8
1/8
0
4/8
Nichtlinearität
> 1/2 LSB
3/8
2/8
1/8
Offsetfehler
0
001 010 011 100 101 110 111
kein Offsetfehler
001 010 011 100 101 110 111
Digital-Eingang
Digital-Eingang
Abbildung 12: Vergleich der Kriterien zur INL-Bestimmung bei D/A-Umsetzern
Die Spezifikation des integralen Linearitätsfehlers nach der Endpunkt-Definition liefert
realistischere Werte und ist daher vorzuziehen.
Zu beachten ist, dass der integrale Linearitätsfehler nicht abgeglichen werden kann.
2.2.4 Differenzieller Linearitätsfehler
Im Gegensatz zur integralen Nichtlinearität, bei der die Fehler aller möglichen Ausgangspunkte
auf die ideale Übertragungsfunktion bezogen werden, wird mit der differenziellen Nichtlinearität
die Abweichung eines einzelnen Ausgangswertes von seinem idealen, theoretisch erwarteten
Wert erfasst. Die differenzielle Nichtlinearität beschreibt den Unterschied der analogen Schritte
zwischen benachbarten digitalen Codes. Sie ist Null, wenn ein Schritt zwischen zwei
benachbarten Codes genau 1 LSB ist. Andernfalls hat dieser Schritt einen differenziellen
Linearitätsfehler, der nicht abgeglichen werden kann (Abbildung 13).
LE
+- 1/2 LSB
LE = 0 LSB
LE
+- 1 LSB
LE = -1 LSB
DLE =
+1 LSB
LE = 0 LSB
DLE =
-1 LSB
LE = +1 LSB
DLE =
+1 LSB
LE = 0 LSB
DLE =
-2 LSB
LE = +1 LSB
DLE =
+1 LSB
DLE =
+1 LSB
LE = -1 LSB
DLE =
-1 LSB
LE ... Linearity Error (Linearitätsfehler)
DLE ... Differential Linearity Error (Differenzielle Nichtlinearität)
000
001
010
011
100
Digital-Eingang
101
110
111
Abbildung 13: Linearitätsfehler und differenzielle Nichtlinearität
Ausgabe 2002
AD1/AD2 – 11 / 22
2.2.5 Monotoniefehler
Die Monotonie ist, obwohl im eigentlichen Sinn keine Umsetzer-Spezifikation, eine wichtige
Übertragungseigenschaft eines D/A-Umsetzers. Die Monotoniebedingung fordert, dass ein
Umsetzer bei Erhöhung der Wertigkeit des digitalen Eingangscodes einen steigenden Wert der
analogen Ausgangsgröße liefert oder, mathematisch ausgedrückt: Die Ableitung der
Übertragungsfunktion muss immer größer/gleich Null sein.
Ein monotoner Umsetzbetrieb ist nur bei einer differenziellen Nichtlinearität von kleiner/gleich
1 LSB gewährleistet (Abbildung 14).
(b)
Nicht monotone Umsetzung auf Grund von
zu hoher DNL
7/8
7/8
6/8
6/8
5/8
5/8
Analog-Ausgang
Analog-Ausgang
(a)
Monotone Umsetzung mit großem
Linearitätsfehler
4/8
3/8
2/8
1/8
0
4/8
3/8
2/8
1/8
001 010 011 100 101 110 111
0
001 010 011 100 101 110 111
Digital-Eingang
Digital-Eingang
Abbildung 14: Monotonie bei D/A-Umsetzern
Als Beispiel für die Auswirkung einer nichtmonotonen D/A-Umsetzung soll ein A/D-Umsetzer,
der nach dem Prinzip der sukzessiven Approximation arbeitet und der einen internen DAC (D/AConverter) benötigt, betrachtet werden.
Da der analoge Ausgangswert des verwendeten DACs (Abbildung 15) bei gesetztem MSB
(korrekte Umsetzung: Die Bitkombination 100 ergibt VFSR/2) kleiner ist als der Wert für die
Bitkombination 011, ist die D/A-Umsetzung nicht monoton. Weil stets zuerst geprüft wird, ob
das MSB größer oder kleiner ist als der Eingangswert, mit dem es verglichen wird, ist die
Möglichkeit einer späteren Änderung ausgeschlossen. D.h., wenn das MSB einem kleineren
Wert als dem analogen Wert des Codes 011 entspricht, ist es unmöglich, dass der Code 011
erscheint (missing code).
Tabelle 1 zeigt die Resultate der Versuche bei verschiedenen Pegeln in der Umgebung des
nichtmonotonen DAC-Bereichs (Der Code wird akzeptiert wenn er unter dem Eingangspegel
liegt!).
Ausgabe 2002
AD1/AD2 – 12 / 22
7/8
Ausgangssignal
des internen D/AUmsetzers
Analog-Ausgang
6/8
5/8
4
4/8
3
2
1
3/8
2/8
Eingangspegel
1/8
0
001 010 011 100 101 110 111
Digital-Eingang
Abbildung 15: Ursachen für Missing Code
Eingangspegel (Abbildung 15)
Code
1
2
3
4
100
nein
ja
ja
ja
010
ja
-
-
-
011
nein
-
-
-
110
-
nein
nein
nein
101
-
nein
nein
nein
Digitales Ausgangswort
010
100
100
100
Richtiges digitales
Ausgangswort
010
010
011
100
Fehler
keiner
2 Bit
1 Bit
keiner
Tabelle 1:Umsetzergebnisse bei sukzessiver Approximation
2.3
Dynamische Parameter
Die maximale Umsetzgeschwindigkeit, die ein D/A-Umsetzer (z.B. mit Spannungsausgang)
erreichen kann, wird von einer Reihe dynamischer Faktoren begrenzt, von denen die Einstellzeit
von größter Bedeutung ist. Weiters verursachen transiente Spannungsspitzen (,,glitches“) am
Ausgang des Umsetzers nicht nur störende Fehler, sondern beeinflussen auch die Einstellzeit
ungünstig.
2.3.1 Einstellzeit
Die Einstell-, Einschwing- oder Beruhigungszeit eines D/A-Umsetzers umfasst die Zeitspanne,
die der Umsetzer benötigt, bis sich die Ausgangsspannung nach einem Codewechsel am Eingang
innerhalb eines definierten Fehlerbandes eingestellt hat (Abbildung 16).
Ausgabe 2002
AD1/AD2 – 13 / 22
V
Erholungszeit
Fehlerband
+- 1/2 LSB
+ FS
Einstellzeit
Anstiegsgeschwindigkeit
- FS
Digital-Eingang
alle '0'
alle '1'
t
Abbildung 16: Charakteristische Zeiten bei D/A-Umsetzern
2.3.2 Transiente Spannungsspitzen am Ausgang des D/A-Umsetzers
Als ,,glitch“ wird eine transiente Spannungsspitze bezeichnet, die bei jeder Umschaltung des
Eingangscodes am Ausgang eines D/A-Umsetzers auftreten kann. Dieser Effekt wird durch zwei
Fehlerquellen ausgelöst:
1. Nichtsynchrone Schaltzeiten der Analogschalter sowie Einstreuungen der Logikpegel
über parasitäre Kapazitäten auf die Signalwege. Um die Glitch-Fehler in tolerierbaren
Grenzen zu halten, müssen die Schaltzeiten der Analogschalter soweit wie möglich
synchronisiert werden, d.h. Schaltverzögerungen sollten bei allen Schaltern des
Umsetzer-Moduls gleich, und die Unterschiede zwischen der Einschalt- und der
Ausschaltverzögerung möglichst klein sein.
2. Unterschiedliche Schaltgeschwindigkeit der Logikelemente in Abhängigkeit von der
Flankenrichtung (Abbildung 17).
Bit 1
Digital-Eingang
Bit 2...n
Zeitlicher Versatz
Kein zeitlicher
Versatz
Abbildung 17: Unterschiedliche Signalverzögerungen als Ursache für „Glitches“
Ein maximaler Fehler tritt dort auf, wo eine Umschaltung des MSB auch eine Umschaltung aller
anderen Bits auslöst (z.B. 100…00 ! 011…11), d.h. der maximale Glitch-Fehler liegt genau in
der Skalenmitte eines D/A-Umsetzers. In Abbildung 18 ist als Beispiel die Erzeugung einer
Rampenfunktion mit Hilfe eines 3-bit D/A-Umsetzers aufgezeichnet.
Ausgabe 2002
AD1/AD2 – 14 / 22
Dezimal
Bit3
Bit2
Bit1
0
0
0
0
0
0
0
1
0
0
1
0
0
0
2
0
1
0
0
1
0
3
1
1
0
1
0
0
4
1
0
0
1
0
0
5
1
0
1
1
0
0
6
1
1
0
1
1
0
7
1
1
1
0
0
0
8
0
0
0
Abbildung 18: 3-Bit Rampenfunktion mit „Glitches"
Ausgabe 2002
AD1/AD2 – 15 / 22
3 Aus den Unterlagen zu „Elektronische Schaltungstechnik 2, VO“
3.1
D/A-Umsetzer
In der einfachsten Form kann eine D/A-Umsetzung durch eine Reihe von dual (binär) gestuften
Widerständen durchgeführt werden (Abbildung 19). In Abhängigkeit von der Ansteuerung durch
den Eingangscode werden die Analogschalter umgeschaltet, so dass Teilströme in den
Summenpunkt fließen. Ein Nachteil dieses Verfahrens ist es, dass pro Bit mehr Auflösung der
Betrag des Reihenwiderstandes verdoppelt werden muss. Mit der Zunahme der Auflösung muss
aber ebenso die Genauigkeit des Widerstands-Abgleichs zunehmen, um die Umsetzfehler in den
Grenzen zu halten, die der erhöhten Auflösung angepasst sind.
R
R
2R
Vaus
4R
Vref
2N-1R
Abbildung 19: D/A-Umsetzer mit dual gestuften Widerständen
Vorteilhafter ist die Verwendung eines R-2R-Widerstands-Netzwerkes, das den Eingangsstrom
in binär gewichtete Ströme aufteilt.
Seit es elektronische Schalter ohne Spannungsfehler (FET, MOS, CMOS) gibt, kann dieses
Leiternetzwerk direkt mit den Bitschaltern verbunden werden. Es kann dann als Spannungs- oder
Stromteiler fungieren.
MSB
Vref
2R
R
Vaus
2R
R
R
LSB
2R
2R
Abbildung 20: D/A-Umsetzer mit Leiternetzwerk als Spannungsteiler
Der Ausgang eines 2R/R Leiternetzes als Spannungsteiler kann formal als eine Spannungsquelle
mit der Klemmenspannung V = Vref m/2n und dem Innenwiderstand R betrachtet werden. 4 bit
Leiternetzgruppen können zu dekadischen BCD-Leiternetzen verbunden werden. (m = digital
dargestellte Zahl).
Ausgabe 2002
AD1/AD2 – 16 / 22
Bei der Verwendung des Leiternetzes als Stromteiler liegen alle Schalter auf Massepotential.
Auch die Spannung über den geöffneten Schaltern ist null (Umschalten zwischen Kontakten mit
gleichem Potential). Wenn die Schalter in beiden Stromrichtungen leiten, kann ein derartiger
Umsetzer auch eine Wechselspannung (am Referenzeingang) mit dem digitalen Wort bewerten.
Man erhält eine Multiplizierschaltung (multiplying DAC), die das analoge Produkt aus einem
analogen und einem digitalen Faktor bildet. Man erhält also z.B. ein digital einstellbares
Potentiometer.
R
Vref
2R
R
R
2R
2R
2R
R
MSB
LSB
Vaus
Abbildung 21: D/A-Umsetzer mit Leiternetzwerk als Stromteiler
3.2
A/D-Umsetzer
Man unterscheidet drei grundsätzlich verschiedene Umsetzungsprinzipien:
1. Parallelverfahren (flash converter):
Die Umsetzung wird in einem einzigen Arbeitsschritt durchgeführt; es werden n innere
Referenzgrößen benötigt. Das Verfahren ist sehr schnell (Videofrequenzen).
2. Wägeverfahren (successive approximation converter):
Es werden N = ld n Arbeitsschritte und N innere Referenzgrößen benötigt. Es ergibt sich
ein günstiger Kompromiss zwischen Umsetzzeit und Aufwand.
3. Zählverfahren (incremental converter).
Die Umsetzung dauert n Arbeitsschritte; es ist nur eine innere Referenzgröße notwendig.
Dieses Verfahren ist langsam, es weist aber eine sehr gute Linearität auf.
ar
R/2
K
D
Q
Q
R
a
K
D
Q
Q
n
Komparatoren
d
n
FFs
R
K
D
Q
Q Prioritätskodierer
R/2
clk
Abbildung 22: Parallel A/D-Umsetzer
Ausgabe 2002
AD1/AD2 – 17 / 22
Beim Parallel A/D-Umsetzer stellen n Komparatoren fest, welchem Intervall die Eingangsgröße
zuzuordnen ist. Der oberste Komparator in Abbildung 22 dient zur Anzeige einer
Bereichsüberschreitung. Die den einzelnen Intervallgrenzen entsprechenden Spannungen werden
in einem Spannungsteiler aus n Widerständen erzeugt. n D-Flip-Flops synchronisieren den
Zustand der Komparatoren damit sichergestellt wird, dass ein bestimmter Zeitpunkt für den
Umsetzvorgang repräsentativ ist. Ein Prioritätskodierer reduziert die Zahl der Datenleitungen
von n auf N. Derartige Umsetzer erreichen Auflösungen bis zu 8 bit (256 Komparatoren!) bei
Umsetzzeiten von 10 ns. Ein großes Problem stellen die vielen parallelgeschalteten
Komparatoreingänge dar, die einen hohen Eingangsstrom und eine hohe Eingangskapazität
verursachen. Die Genauigkeit derartiger Umsetzer hängt vom Spannungsteiler und den
Eingangsfehlspannungen der Komparatoren ab.
Start Status
Analogspeicher
a
N Takte
S&H
C
ar
A
D
N bit
DAC
Steuerlogik
T
}
SAR
N bit
Speicher
d
Abbildung 23: A/D-Umsetzer nach dem Wägeverfahren
Der A/D-Umsetzer nach dem Wägeverfahren ermittelt das Resultat der Umsetzung in gleicher
Weise, wie mit Hilfe einer Balkenwaage und einem duadischen Gewichtssatz eine unbestimmte
Masse bestimmt würde. Der Umsetzer besteht aus einem Komparator, einem N bit
Digital/Analog-Umsetzer mit Referenzspannung und einer logischen Schaltung, die häufig mit
SAR (successive approximation register) bezeichnet wird. Da sich während der N Taktschläge
dauernden Umsetzungs-Operation die Eingangsgröße nicht ändern darf, muss ein derartiger
Umsetzer mit einer analogen Speicherschaltung (sample and hold) betrieben werden. Diese sorgt
dafür, dass der Augenblickswert der Eingangsspannung zum Zeitpunkt des Beginns der
Umsetzung bis zum Ende zur Verfügung steht. Nach Eintreffen des Startsignals vergleicht der
Komparator das probeweise auf die logische Eins geschaltete höchstwertige Bit aus dem D/AUmsetzer mit der Eingangsgröße. Ist diese größer, wird diese Eins in die höchstwertige Stelle des
Registers eingeschrieben, der Beitrag der höchstwertigen Stelle bleibt während der weiteren
Umsetzung erhalten. War nach dem ersten Vergleich der Beitrag des höchstwertigen Bit größer
als die Eingangsspannung, wird die logische Null eingeschrieben. Im zweiten Arbeitsschritt wird
nun das nächst niederwertigere Bit probeweise auf Eins gesetzt und das Ergebnis des Vergleichs
beobachtet. Ergibt sich wieder eine größere Eingangsspannung, verbleibt die Eins an dieser
Stelle, andernfalls wird. eine Null in die zweite Stelle eingetragen. Nach N Taktschlägen ist die
Eingangsgröße a auf N bit genau durch die Stellung des Registers angenähert. Umsetzer nach
diesem Verfahren sind weit verbreitet, sowohl in Mikrocontrollersystemen als auch für die
digitale Signalverarbeitung. Zurzeit sind Umsetzer mit 16 bit Auflösung und Konversionszeiten
von ca. 1 µs verfügbar (z.B. AD7677, Analog Devices). Die Genauigkeit des Umsetzers hängt
wesentlich von jener des internen D/A-Umsetzers ab. Formal kann das System wie eine
Gegenkopplungsschleife betrachtet werden, in der sich ein D/A-Umsetzer befindet. Der
Umsetzvorgang entspricht dem Einschwingen der Schleife.
Alle inkrementalen Umsetzer benötigen eine nicht unerhebliche Zeit zur Ausführung der
Umsetzung. Diese Zeit kann nützlich zur Bildung des arithmetischen Mittelwertes der zu
messenden Spannung und damit zur Unterdrückung von der Messspannung überlagerten
Ausgabe 2002
AD1/AD2 – 18 / 22
Störspannungen herangezogen werden. A/D-Umsetzer, die den Zeitmittelwert der Eingangsgröße
bewerten, heißen integrierende A/D-Umsetzer. Diese bilden den zeitlichen Mittelwert der
analogen Größe a während der festen Zeitspanne T
1
a=
T
T
∫ a dt
0
Eine periodische Störspannung as der Frequenz f
a s = aˆ s cos 2πft
erzeugt in Abhängigkeit von der zeitlichen Lage des Integrationsintervalls einen Mittelwert a s ,
für den gilt
a s ≤ aˆ s
1
T
sin πfT
, weil
πfT
T
2
∫
−
T
2
cos( 2πft ) dt =
sin πfT
πfT
Dies bedeutet, dass Störsignale, deren Perioden in der Integrationszeit ganzzahlig enthalten sind,
vollkommen unterdrückt werden.
Abbildung 24: Unterdrückung der Störspannung durch die Bildung des zeitlichen Mittelwertes
Ausgabe 2002
AD1/AD2 – 19 / 22
Für Störfrequenzen, die der Messspannung überlagert sind, verhält sich ein integrierender
A/D-Umsetzer wie ein Tiefpass erster Ordnung, dem zusätzliche Nullstellen unterlagert sind. In
der Praxis wird daher die Integrationsdauer als ganzzahliges Vielfaches der Netzperiode gewählt.
Tektfrequenz f 0
C
f
R1
Q
a
Frequenz
(Rate)
OP
C
D
Q
R2
k
ar
a
R1
ar
k
R2
0,
k
f
f0
Tastverhältnis
a R2
ar R1
Abbildung 25: Ladungsausgleichsintegrator (charge balance)
Am Ausgang k kann ein zeit- und wertdiskretes, binäres Signal abgenommen werden. Der
zeitliche Mittelwert dieses Signals ist streng proportional der Eingangsgröße des Umsetzers a.
Um eine der Frequenz ähnliche Größe (Rate) zur Verfügung zu stellen, muss das Signal k mit der
Taktfrequenz des D-FFs UND-verknüpft werden. Es ergibt sich ein Impuls für jede Taktzeit, in
der der Schalter geschlossen ist.
Eine Fehlerquelle in diesem Verfahren sind die unterschiedlichen Laufzeiten des FFs und des
Schalters für die steigende und fallende Flanke. Wenn durch geeignete Schaltungsmaßnahmen
verhindert wird, dass das Tastverhältnis > 0,5 wird, ergibt sich für jedes rückgekoppelte
Ladungspaket der gleiche relative Fehler. Somit führen die ungleichen Laufzeiten nur zu einem
Steigungs- und keinem Linearitätsfehler.
a
f
k
Int.
Abbildung 26: Spannungsverlauf im Ladungsausgleichsintegrator
Anmerkung: Wegen der Aperiodizität ist es äußerst schwierig, von den Signalverläufen f, k und
Int. ein stehendes Oszillogramm zu erzeugen.
Das gezeigte Beispiel des Ladungsausgleichsintegrators benötigt eine Referenzspannung mit
einem der Messspannung umgekehrten Vorzeichen. Es kann nur Eingangsgrößen einer Polarität
verarbeiten. Bipolare Signale werden verarbeitet, wenn eine positive und negative
Referenzspannung gleichen Betrages verwendet wird und der Widerstand R2 entsprechend der
Stellung des FFs an die positive oder die negative Referenzspannung gelegt wird. Der das
Ausgabe 2002
AD1/AD2 – 20 / 22
Resultat speichernde Zähler zählt in dem einen Fall rückwärts, im anderen Fall vorwärts. Die
Eingangsspannung 0 Volt entspricht somit dem Tastverhältnis 0,5: Es wird gleich häufig
vorwärts und rückwärts gezählt, das Resultat ist Null.
Die Größe des Integrationskondensators bestimmt den dem Komparator zur Verfügung
stehenden Hub. In die Genauigkeit des Umsetzers geht der Betrag der Kapazität nicht ein. Zur
Messung sehr hoher Spannungen kann der Widerstand R1 beliebig groß gemacht werden, weil
vor R1 kein Schalter liegt. Am virtuellen Nullpunkt des Integrators sind leicht Schutzdioden
anzubringen. Aus diesem Grund kann dieser Umsetzer auch im Bereich der
Hochspannungsmesstechnik gut verwendet werden. Sein Ausgangssignal kann über Lichtleiter
abgeführt werden.
Das Zwei-Rampenverfahren (dual slope, dual ramp) ist das älteste integrierende A/D-Umsetzerverfahren. Es ist im Messgerätebau weit verbreitet.
S1
S1
C
S2
S2
a
R
Takt
u
S3
OP
ar
S3
τ
Steuerlogik
C
d
Zähler
u
Null
S1
Mess
S2
mτ
Ref
S1
nτ
Null
S1
t
Abbildung 27: Zwei-Rampen-Verfahren (dual slope, dual ramp)
Das Verfahren läuft in drei Arbeitsschritten (siehe Abbildung 27). Während der Phase Null (S1
geschlossen) wird der Integrationskondensator entladen. In der Phase Mess (S2 geschlossen) wird
das Zeitintegral der Messgröße a während einer festen Zahl m von Taktschlägen der Dauer T
gebildet. Danach wird in der Phase Ref (S3 geschlossen) zu dem gebildeten Integral das
Zeitintegral der Referenzgröße hinzugezählt. Da die Referenzgröße umgekehrtes Vorzeichen
trägt, wird zu einem bestimmten Zeitpunkt der Betrag des Integrals Null sein. Zu diesem
Zeitpunkt unterbricht der Komparator die Referenzintegration, der Zähler in der Steuerlogik
zeigt die Dauer der Referenzintegration als Ergebnis an. Wie man sieht, kürzt sich aus dem
Resultat sowohl die Periode des Taktgenerators τ als auch das RC-Produkt des Integrators. Diese
beiden Tatsachen sind der Grund für die große Beliebtheit des Verfahrens.
Nachteile des Verfahrens sind
1. die Tatsache, dass die ,,Beobachtung“ des Eingangssignals durch die Phasen Null und
Ref unterbrochen wird,
2. dass beim zeitlichen Übergang von Mess auf Ref die gesamte Information im
Integrationskondensator steckt und dessen dielektrische Absorption den
Genauigkeitsengpass darstellt und
Ausgabe 2002
AD1/AD2 – 21 / 22
3. dass im Eingang a ein elektronischer Schalter S2 notwendig ist, der es verbietet, höhere
Spannung direkt zu verarbeiten.
Da die Schalter S1 und S3 nur einmal pro Konversion betätigt werden, sind ihre Zeitfehler wenig
kritisch.
Wird die Referenzspannung während der Referenzintegration von der Stellung des Zählers
abhängig gemacht, kann der Umsetzer Sensorfunktionen implizit lösen. Die Abhängigkeit der
Referenzspannung wird erzeugt, indem diese aus einem D/A-Umsetzer entnommen wird, dessen
Eingangssignale aus einem ROM stammen, welches vom Zähler adressiert wird. Einfache
nichtlineare Funktionen können auch implementiert werden, wenn während der Referenzphase
der Widerstand R z.B. mit Hilfe eines parallelgeschalteten Leiternetzes verändert wird.
Die eben gezeigte Schaltung hat nur prinzipielle Bedeutung, weil einerseits der
Eingangswiderstand klein ist und die Eingangsfehlspannung des Operationsverstärkers stört.
C
a
S2
R2
S1
-ar
S3
R
R1
OP1
OP2
OP3
K
D
S1
Q
Q
R3
τ
CAZ
Abbildung 28: Praktische Ausführung des Zwei-Rampen A/D-Umsetzers
Tatsächlich eingesetzte Umsetzer (siehe Abbildung 28) verwenden einen Folger im Eingang,
einen Nachverstärker zur schnelleren Ansteuerung des Komparators und automatischen
Nullabgleich (Autozero). In der Phase Null sind jetzt die Schalter S1 und /S1 geschlossen. Am
nichtinvertierenden Eingang von OP2 wird sich jene Spannung einstellen, die notwendig ist, dass
in den Integrationskondensator kein Strom fließt. Da gleichzeitig der Eingang von OP1 auf
Masse liegt, ist somit jene Spannung in CAZ gespeichert, die die Fehlspannungen der ersten drei
Operationsverstärker ausgleicht. Wenn S1 danach geöffnet wird, hält der Kondensator CAZ diese
Spannung während der beiden anderen Phasen konstant. Durch diese Maßnahme wird sowohl
die Offsetspannung der Operationsverstärker als auch deren zeitliche Veränderung (Alterung)
vollkommen ausgeglichen. Der Widerstand R3 verhindert die kapazitive Belastung von 0P3
durch den großen (ca. 1 µF) Kondensator CAZ. Durch den begrenzenden Nachverstärker wird die
Steigung der Rampe in der Nähe des Nulldurchganges vergrößert und somit die zeitliche
Unsicherheit des Komparators reduziert. Wenn dieses analoge System mit kritischen
Spannungen < 1 mV in unmittelbarer Nähe des digitalen Steuerwerks arbeiten soll (auch auf dem
gleichen Halbleiterchip), dann ist es vorteilhaft, mit Hilfe eines Synchronisations-Flip-Flops die
Stellung des Komparatorausganges zu einem Zeitpunkt abzufragen, zu dem das Digitalsystem in
Ruhe ist.
Mit derartigen Maßnahmen ist es möglich, Umsetzer mit Auflösungen bis zu 20 bit und
Empfindlichkeiten von 1 µV zu konstruieren. Bei den hohen Auflösungen stört oft die dabei
entstehende lange Messzeit. Sie kann dadurch verkürzt werden, dass während der Messphase in
Anlehnung an das charge balance Verfahren der Integrationskondensator immer wieder entladen
wird und auf diese Weise die höherwertigen Stellen des Messresultates ermittelt werden. Nach
Ausgabe 2002
AD1/AD2 – 22 / 22
Ende der Messphase wird dann entsprechend kürzer zur Ermittlung der fehlenden Stellen
referenzintegriert. Auch in der Referenzintegration kann zur Verkürzung der Zeit mit
dezimalgewichteten Strömen gearbeitet werden (multiple slope). Alle diese verkürzenden
Maßnahmen machen den Vorteil, dass der Betrag des Integratorwiderstandes nicht eingeht,
zunichte.
Nachstehend ist ein Vergleich des Ladungsausgleichs- mit dem Zwei-Rampen-A/D-Umsetzverfahren durchgeführt.
Ladungsausgleich
Zwei-Rampen
C
C
R1
R
a
K
a
K
R2
-ar
-ar
kontinuierlich
diskontinuierlich
ar, R1, R2 genau
nur ar genau!
a beliebig groß
a begrenzt
C klein
mittlere Ladung ! 0
OP kritisch
Komparator unkritisch
C groß, DA = 0
mittlere Ladung prop. A
OP unkritisch
Komparator kritisch
Störladung und Zeitfehler des Schalters sehr
kritisch
Störladung und Zeitfehler der Schalter
unkritisch
Ausgabe 2002