- Stuettler.org
Werbung

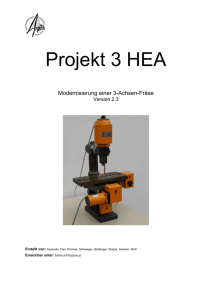
Schrittmotoren V1.1 _______________________________________________________________________________________ Schrittmotoren 1. Voraussetzung Genaue Kenntnis der Funktion von Gleichstrommotoren, Schrittmotoren, Erläuterungen der Vorbesprechung 2. Ziel : Vertiefung der Kenntnisse über den Schrittmotor, Typen, Funktion, Ansteuerung 3. Einführung Bei Schrittmotoren handelt es sich eigentlich um Synchronmotoren bzw. um Reluktanzmotoren. Sie dienen zur Erzeugung von Stellkräften und exakten Verfahrwegen für Schlitten, .. Der Vorteil gegenüber von Gleichstrommotoren ist vornehmlich darin zu sehen, daß der Verfahrweg nicht zurückgemessen werden muß, sondern durch die Anzahl der vom Schrittmotor vollführten Schritte genau determiniert ist. Allerdings tritt bei Belastung ein kleiner Fehlwinkel auf. Beachten Sie, daß die gewünschte Schrittzahl / sec ( = Schrittgeschwindigkeit ) bei größeren Schrittgeschwindigkeiten nie sprungartig aufgeschaltet werden darf. Sie muß langsam rampenförmig auf die gewünschte Schrittgeschwindigkeit erhöht werden, damit der Schrittmotor der Beschleunigung folgen kann und keine 'Schritte verliert' ! 3.1 Typen unipolare Schrittmotore bipolare Schrittmotore Die Wicklungen werden nur in einer Richtung durchstromt. Üblich sind 4 Phasen. Die Wicklungen werden in beiden Richtungen Durchstromt. Üblich sind 2 Phasen. N S Ein Schritt entspräche hier 90°-72°=18°. Eine Erhöhung der Polpaarzahl ( hier 1 ) auf größere Werte verkleinert die Schrittwinkel. Ein Schritt entspräche hier 90°,... _______________________________________________________________________________________ Stüttler PA V1.0 Schrittmotoren V1.1 _______________________________________________________________________________________ 3.2 Ansteuerschaltungen Die Ansteuerschaltung für die unipolaren Schrittmotore ist besonders einfach. Für bipolare wird hingegen pro Phase ein Brückenschaltung benötigt. Allerdings sind hierfür integrierte Bausteine incl. Leistungsstufe erhältlich. Für Motoren im sogenannten Mikroschrittbetrieb werden manchmal auch analoge Gegentaktendstufen verwendet. unipolar für alle 4 Phasen bipolar ( hier nur für eine Phase dargestellt ) Ansteuerschaltung Brücke + + - Cboot - Die Schaltung ist sehr einfach! Die Gate-Dioden dienen der schnellen Entladung der GateDrain-Kapazität und damit dem schnellen Ausschalten. Beachten Sie, daß zum Durchaschalten der selbstsperrenden FETs in der oberen Brückenhälfte eine Spannung über der Betriebsspannung nötig ist => Bootstrapkondensator ,.. Freilaufdioden : Werden induktive Lasten geschaltet, kann der Laststrom nicht plötzlich abgeschaltet werden. Es würden bei einem plötzlichen Abschalten der Mosfets sehr hohe Selbstinduktionsspannungen auftreten die den Mosfet zerstören würden. Schnelle Freilaufdioden müssen daher eingebaut werden. Sie übernehmen den Laststrom und verhindern die Selbstinduktionsspannungen. Schaltungen ohne Freilaufdioden sind für induktive Lasten nicht geeignet. 3.3 Ansteuersequenzen Die einfachste Betriebsart ist der Vollschrittbetrieb : immer eine Phase ist durchstromt. Im Halbschrittbetrieb werden die Phasen überlappend durchstromt. Dadurch wird die Schrittauflösung halbiert. Im Hochmomentenbetrieb sind immer 2 Phasen mit Strom beaufschlagt. Im Minischrittbetrieb nimmt der Strom in einer Phase schrittweise ab und in der nächsten gleichzeitig schrittweise zu. So können beliebig viele Zwischenpositionen angefahren werden. Vollschrittbetrieb ( jeweils uni- und bipolar ) P1 t P1 t P2 P3 P2 P4 Halbschrittbetrieb _______________________________________________________________________________________ Stüttler PA V1.0 Schrittmotoren V1.1 _______________________________________________________________________________________ Vollmomentenbetrieb Phasenstromverlauf im Mikroschrittbetrieb tatsächlich werden normalerweise sin-förmige Ströme beaufschlagt=> konst. Moment 3.4 PWM für volle Leistung Weil die Wicklung der Schrittmotore ein Induktivität aufweist, wird der Strom in den Phasen nur langsam nach einer e-Potenz ansteigen. Die Folge wäre ein geringes Moment, schlechte Dynamik und kleine Maximaldrehzahlen. Deshalb wird fast immer der Phasenstrom über eine hohe gechoppte Phasenspannung ( PWM ) erzeugt und überdies auf den Wunschstrom geregelt. Dh. es werden nahezu rechteckige Stromimpulse mit der Höhe des Phasennennstromes erzeugt. Die Nenn-Phasenspannung des Motors kann dabei um mehr als das 10fache überschritten werden. Stromverlauf ohne Chopper mit Chopper ( PWM ) Nennstrom Nennspannung Sehr schleichender Stromanstieg dadurch nur träger Momentenaufbau geringe Beschleunigung,.. nahezu rechteckförmiger Stromverlauf dadurch gutes Moment, Beschleunigung,.. Alternativ kann mit überhöhter Spannung und Vorwiderständen gearbeitet werden. _______________________________________________________________________________________ Stüttler PA V1.0 Schrittmotoren V1.1 _______________________________________________________________________________________ Treiberbausteine : Leistungs-FETs auf der High-Side (>50V) werden mit diskreten Schaltungen angesteuert, gerne mit BootstrapSchaltungen und auch mit IC - Treibern, die die Steuerspannung mit Übertragern oder optoelektronisch auf das Highside-Potential bringen. Ist die Spannung kleiner ca. 50 V können Treiber ICs verwendet werden, die keine eingebaute galvanische Trennung eingebaut haben (siehe auch 'Bauteile der Leistungselektronik'!) Beispiele für Treiber : L293D, HIP2500, PWR-INT200, PWR-INT201, ICL7667CPA, IL485 (optisch ), TDA2086ADP,.. L297 Treiber mit eingebauter Leistungsstufe ( nur für Verbraucher kleiner Leistung z.B. Schrittmotore,.. ) : BTS721L1, L3717, L6203, LM18298T, H11C6 ( optisch ), TIL3021 ( optisch ), NDS9407 ( optisch ), .. SAA1027 4. Aufgaben 4.1 3717 Mit dem Schrittmotorenbaustein 3717 wird ein bipolarer Schrittmotor angesteuert. Die Ansteuersequenzen werden mit einem Mikrocontroller in 'Basic' erzeugt. Schreiben Sie ein Steuerprogramm und stellen Sie den Strom einer Phase und den am Meßwiderstand Rs am Oszilloskop dar! Rs, IN0 und IN1 bestimmen die Phasenstromgröße, Phase die Stromrichtung. Uref=5V Vcc=5V Umot=5V IN0 IN1 I 0 1 0 1 0 0 1 1 100% 60% 20% 0% Osz. IN0 9 11 6 3,14 1 IN1 7 Phase 8 Um+ Ro IC3717 15 Um2 4,5,12,13 M 10 16 TP Osz. Ro .. Meßwid. Für Osz. Rs .. Stromshunt TP .. Tiefpaß M .. Monoflop für PWM Rs Die Meßschaltung ist fertig aufgebaut. Das Programm steuert die Platine über den PPort Adresse 0x278 ( 0x378,..). Bit am Port Wertigkeit H278 0 0, 2 1, 21 2, 22 4, 24 5, 25 6, 26 1 2 4 16 32 64 Eingang Programm (Basic )1 : IN0 Phase IN1 IN1 Phase IN0 100 Poke H278,85 120 For I=1 to 10 140 Gosub200 I=20% 150 Next I 200 Poke H278,84 210 Poke H278,21 220 Poke H278,86 230 Poke H278,53 240 Return am 1. IC3717 am 1. IC am 1. IC am 2. IC3717 am 2. IC am 2. IC I=60% (81) (69) (83) (101) I = 100% (80) (5) (2) (37) 1 für einen PC mit der Parallelportadresse 0x3bc kann dieser als Steuerport verwendet werden. In C ist 'Poke 278,17' zu ersetzen durch outport(278,17); _______________________________________________________________________________________ Stüttler PA V1.0 Schrittmotoren V1.1 _______________________________________________________________________________________ 4.2 SAA1027 Der Baustein dient zur Ansteuerung von unipolaren Schrittmotoren. Die Ansteuerung ist etwas einfacher, weil der Strom nicht über digitale Eingänge eingestellt werden kann, sondern über ein Potentiometer. Schreiben Sie ein Steuerprogramm und stellen Sie den Phasenstrom am Oszilloskop dar. Verstellen Sie den Phasenstrom mit dem Potentiometer ( Achtung Izul = 250mA ). 10V Programm : Rx 14 C 15 M 3 R 2 4 Osz. 10 Input speed 40 Poke H278,0 50 For L=1 to speed : Next L 60 Poke H278,1 70 For L=1 to speed : Next L 80 Goto 40 13 6 SAA1027 8 9 11 Rx bestimmt den Phasenstrom Bit am Port 0, 20 2, 22 1, 21 Wertigkeit 1 4 2 Eingang C .. clock ( taktet einen internen Schrittsequenzer ) R .. reset ( aktiv low ) M .. mode ( vor/rück ) 4.3 L298N Der L298N verfügt in einem Multiwatt15 - Gehäuse über 2 Brückenschaltungen. Er dient als Leistungstreiber für bipolare Schrittmotoren oder zur Ansteuerung von 2 Gleichstrommotoren. In Verbindung mit dem Baustein L297 ist eine PWM-Stromregelung realisierbar. Wir verwenden nur den L298 ohne L297, steuern einen Gleichstrommotor und erzeugen den PWM-Takt mit dem Mikrokontroller und einem Basicprogramm. Vss=10V Programm : Vss=5V Osz. 9 Ena 4 11 13 GM Ro In4 12 L298N ( unvollständig dargestellt ) In3 10 10 Input speed 50 For L=1 to 1 : Next L 60 Poke H278,4 (2) 70 For L=1 to speed : Next L 80 Poke H278,5 (3) 90 Goto 50 14 15 Bit am Port 0, 20 1, 21 2, 22 Rs Ro .. Hilfsmeßwiderstand Rs .. Strommeßshunt Wertigkeit 1 2 4 Eingang Enable IN4 IN3 In dieser Anwendung werden von den zwei Brücken des L298 nur eine verwendet. Enable deaktiviert den IC und ergibt den Freilauf. IN3,4 erlauben 4 Bitkombinationen und erlauben 4 Betriebsarten: vor/rück/2xBremsbetrieb _______________________________________________________________________________________ Stüttler PA V1.0