Formelüberblick TM 3 - Institut für Nichtlineare Mechanik
Werbung

Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 1
Kinetik
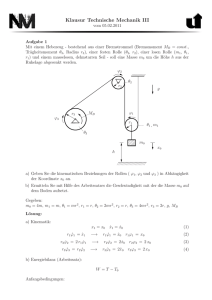
Bisher wurde nur die Kinematik von Bewegungen untersucht (d.h. Weg, Geschwindigkeit und Beschleunigung). Es sollen nun Kräfte (später auch Momente) mit diesen kinematischen Größen verknüpft werden:
Schwerpunktsatz (Impulssatz)
F~2
F~3
m ~aS =
S
F~4
z
X
F~i
(1)
i
m
F~1
~rS
y
x
Für einen starren Körper der Masse m beschreibt
der Schwerpunktsatz
raumfestes System
die translatorische räumliche Bewegung, wobei ~aS
die absolute Beschleunigung des Schwerpunkts S
des Körpers ist. Auf der rechten Seite muss die Resultierende aller äußeren Kräfte gebildet werden,
die an diesem Körper angreifen.
Der Schwerpunkt eines starren Körpers bewegt
sich folglich so, als ob alle Kräfte an ihm angriffen
und die gesamte Masse in ihm vereinigt wäre.
Der Schwerpunktsatz kann in verschiedenen Koordinatensystemen ausgedrückt werden, z.B.:
Kartesische Koordinaten:
m ẍS =
m ÿS =
X
i
X
Zylinderkoordinaten (siehe FS 3):
Fix
Fiy
m r̈ − r ϕ̇2
=
m (r ϕ̈ + 2 ṙ ϕ̇) =
X
i
X
Fir
Fiϕ
i
i
m z̈S =
X
Fiz
i
Vorgehensweise zur Anwendung des Schwerpunksatzes
1. Körper freischneiden.
2. Äußere Kräfte an jedem Körper eintragen.
3. Koordinaten im Bezugssystem festlegen.
(d.h. Koordinaten wählen, mit denen wir die Lage der einzelnen
Körper beschreiben und VZ der Kräfte beurteilen können)
4. Schwerpunktsatz für jeden Körper aufstellen.
5. Kinematische Zusammenhänge zwischen den
Körpern aufstellen.
6. Gleichungssystem lösen.
m z̈S =
X
i
Fiz
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 2
Trägheitstensor
Zur Berechnung des Dralls (im nächsten Abschnitt) wird der Trägheitstensor benötigt. Er beschreibt
die Massengeometrie eines Körpers bezüglich eines Bezugspunktes. Die Koordinatendarstellung des
Trägheitstensors ist außerdem vom verwendeten Koordinatensystem abhängig.
In einem körperfesten xyz -System lautet der Trägheitstensor bezüglich des Punktes A (=Lage des
Ursprungs des Koordinatensystems):
~~ (A)
Θ
Θxx Θxy Θxz
= Θyx Θyy Θyz
Θzx Θzy Θzz xyz
mit den Elementen
Θxx =
Θyy =
Θzz =
|
Z
Z
Z
2
2
(y + z )dm
(x2 + z 2 )dm
(x2 + y 2 )dm
{z
}
axiale Trägheitsmomente
Θxy = Θyx = −
Θxz = Θzx = −
Θyz = Θzy = −
|
{z
Z
Z
Z
x y dm
x z dm
y z dm
}
Deviationsmomente
Für jeden Bezugspunkt A gibt es ein Hauptachsensystem 1,2,3, für das alle Deviationsmomente gleich
Null sind. Die axialen Trägheitsmomente nehmen darin Maximalwerte an und werden als Hauptträgheitsmomente bezeichnet. Die Hauptachsen und die Hauptträgheitsmomente erhält man durch Lösen
des Eigenwertproblems
det Θ(A) − λE = 0.
Die Eigenwerte λi liefern die Hauptträgheitsmomente Θi , die Eigenvektoren ergeben die Richtungen
der Hauptachsen. In Matrixschreibweise erhält man:
~~ (A)
Θ
Θ1 0
0
= 0 Θ2 0
0
0 Θ3 1,2,3
Eigenschaften:
• Der Trägheitstensor ist symmetrisch (Θxy = Θyx ,...).
• Bei homogenen (ρ = const), symmetrischen Körpern kann man aufgrund der Symmetrie auf
verschwindende Deviationsmomente schließen:
– Ist z.B. die x-Achse Symmetrieachse eines Körpers, dann verschwinden die Deviationsmomente Θxy und Θxz .
– Ist z.B. die yz -Ebene Symmetrieebene eines starren Körpers, so verschwinden die Deviationsmomente Θxy und Θxz .
R
• Im Sonderfall eines homogenen Körpers gilt: Θxx = ρ (y 2 + z 2 )dV , . . .
• Den Trägheitstensor eines zusammengesetzten Körpers erhält man durch Addition der Trägheitstensoren der Teilkörper. Diese müssen den selben Bezugspunkt haben und im selben Koordinatensystem vorliegen.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 3
Steiner’scher Satz
Ist der Trägheitstensor bezüglich des Schwerpunkts S bekannt (z.B. durch die Formeln auf der nächsten Seite), so kann der Trägheitstensor bezüglich des Bezugspunktes A mit der Steiner’schen Formel
berechnet werden. Ist
ρ~AS
a
= b
c
der Verbindungsvektor von A nach S, so gilt
Θ(A)
b2 + c2 −a b
−a c
= Θ(S) + m −a b a2 + c2 −b c .
−a c
−b c a2 + b2
Die Achsen werden dabei nur verschoben, jedoch nicht verdreht.
Ebener Sonderfall:
Im ebenen Fall gilt für das Massenträgheitsmoment
um die z -Achse bei Verschiebung des Bezugspunktes von S nach A:
(S)
2
Θ(A)
zz = Θzz + m r
y
ȳ
S
z
r
A
z̄ = z
x
x̄
Trägheitsradius:
Trägheitsmomente können auch durch den Trägheitsradius k definiert werden. Es gilt z.B.
2
Θ(A)
zz = m k .
(A)
Das Trägheitsmoment Θzz ist folglich gleich dem Trägheitsmoment einer Punktmasse der gleichen
Masse im Abstand k von der z -Achse.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 4
Ausgewählte Massenträgheitsmomemente bezüglich des Schwerpunktes S:
Hohlzylinder der Masse m:
y
z
1
m R2 + r 2
2
1
1
= Θ(S)
m R 2 + r 2 + m ℓ2
yy =
4
12
Θ(S)
=
zz
x
(S)
Θxx
r
ℓ
R
Vollzylinder: Obige Formeln mit r = 0 anwendbar.
Dünnwandiger Hohlzylinder (Rohr) der Masse m:
y
z
Θ(S)
= m R2
zz
x
R
ℓ
Θ(S)
= Θ(S)
xx
yy =
1
1
m R 2 + m ℓ2
2
12
y
Sehr dünner Vollzylinder (Stab) der Masse m:
x
ℓ
z
Θ(S)
= Θ(S)
xx
yy =
y
1
m ℓ2
12
Dünne Scheibe der Masse m:
x
Θ(S)
=
zz
R z
1
m R2
2
1
2
Θ(S)
= Θ(S)
xx
yy = m R
4
Quader der Masse m:
z
c
a
1
m b2 + c 2
12
1
=
m a2 + c 2
12
1
=
m a2 + b 2
12
y
Θ(S)
=
xx
x
Θ(S)
yy
Θ(S)
zz
b
z
Kugel (Radius R, Masse m):
2
(S)
(S)
2
Θ(S)
xx = Θyy = Θzz = m R
5
x
y
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 5
Allgemein setzt sich die räumliche Bewegung eines starren Körpers aus Translation und Rotation
zusammen. Die translatorische Bewegung wird durch den bereits behandelten Schwerpunktsatz beschrieben. Analog dazu beschreibt der Drallsatz die rotatorische Bewegung.
M1
Drall
~ (0) eines bewegten starren KörDer Drall oder Drehimpuls L
pers bezüglich eines raumfesten Punktes O berechnet sich
zu
~ (0) = ~rA × m~vS + ρ~S × m~vA + L
~ (A) .
L
~ (A) der Drall bezüglich eines körperfesten PunkHierbei ist L
~
~ (A) des Körpers
tes A, der mit Hilfe des Trägheitstensors Θ
bezüglich dieses Punktes ausgedrückt werden kann:
ω
A
rA
vA
ρS
O
S
vS
F1
F2
M2
~~ (A)
~ (A) = Θ
L
ω
~.
Drallsatz
Die rotatorische Bewegung eines starren Körpers wird durch den Drallsatz beschrieben
~ (0) X (0)
dL
~ .
M
=
i
dt
i
Er drückt aus, dass die Änderung des Dralls eines Körpers der Summe der äußeren angreifenden
Momente entspricht.
Da der Trägheitstensor in der Regel in einem körperfesten Koordinatensystem aufgestellt wird, ist
folgende Form des Drallsatzes mit identischem körperfesten Bezugspunkt A für Trägheitstensor und
äußere Momente zweckmäßiger
X (A)
~~ (A) ˙
~~ (A)
~
ρ~S × m~aA + Θ
ω
~ +ω
~ ×Θ
ω
~ =
M
.
i
i
Ebene Bewegung
Betrachtet man den Spezialfall der ebenen Bewegung eines starren Körpers mit der Winkelgeschwindigkeit ω
~ = ωz~ez , so vereinfacht sich der Drallsatz zu
ρ~S × m~aA + Θ(A)
~˙ =
zz ω
X
Mz(A)
~ez .
i
i
Dies entspricht einer skalaren Gleichung für die z -Koordinate.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 6
Für die folgenden Sonderfälle entfällt der Term ρ
~S × m~aA :
a) Schwerpunkt als Bezugspunkt für Trägheitstensor und äußere Momente (A = S)
Θ(S)
zz ω̇z =
X
Mz(S)
.
i
i
b) Drehung um eine raumfeste Achse durch A (~vA = 0 und ~aA = 0)
Θ(A)
zz ω̇z =
X
Mz(A)
.
i
i
Dies gilt im Allgemeinen nicht für den Momentanpol, da zwar ~vMP = 0, aber ~aMP 6= 0
c) Momentanpol eines schlupffrei rollenden Rades (ρ
~S k ~aA )
Θ(MP)
ω̇z =
zz
X
i
Mz(MP)
.
i
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 7
Arbeit (mechanische Arbeit)
~i (~r) verrichtet Arbeit, wenn ihr Angriffspunkt längs einer Bahn r~i (t) von r~i0 nach r~i1 verEine Kraft F
schoben wird
Wi,01 =
Z
r~i1
~
ri0
F~i (~
ri ) · d~
ri .
1
d~r
Greifen an einem starren Körper zusätzlich
~ j an, so gilt entsprechend
freie Momente M
Wj,01 =
Z
ϕ~1
ϕ
~0
~ j (~
M
ϕ) · d~
ϕ.
z
x
~r
F~
0
y
Die durch die äußeren Kräfte und Momente am starren Körper verrichtete Gesamtarbeit lautet somit
W01 =
X
Wi,01 +
i
X
Wj,01 .
j
Arbeitssatz (mechanische Arbeit)
Der Arbeitssatz ist besonders geeignet zur Lösung mechanischer Probleme, in denen die Geschwindigkeiten von Körpern unter der Einwirkung von Kräften als Funktion des Weges gesucht ist. Er lautet
T1 − T0 = W01 ,
wobei T0 und T1 die kinetische Energie am Anfangs- und Endpunkt ~r0 und ~r1 ist, und W0,1 die auf
dem Weg von 0 nach 1 verrichtete Arbeit aller am Körper angreifenden äußeren Kräfte und Momente
bezeichnet.
Im Allgemeinen ist W01 nicht nur vom Anfangs- und Endpunkt sondern auch vom Verlauf der Bahnkurve
~r(t) abhängig. Für Kräfte bei denen der Verlauf keine Rolle spielt, kann ein Potential U definiert werden.
Diese Kräfte heißen konservative Kräfte.
Unterteilt man die angreifenden Kräfte in konservative (mit Potential) und nicht-konservative,
F~ = F~ P + F~ ∗ ,
so kann der Arbeitssatz in der Form
∗
T1 − T0 + U1 − U0 = W01
formuliert werden, wobei U1 − U0 die Potentialdifferenz aller angreifenden konservativen Kräfte und
∗
W01
die auf dem Weg von 0 nach 1 verrichtete Arbeit der nicht-konservativen Kräfte ist.
Hinweis: Bei Systemen von Körpern mit nicht-starren Bindungen müssen zusätzlich innere Kräfte in U
bzw. W ∗ berücksichtigt werden.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 8
Energiesatz
Greifen nur konservative Kräfte am Körper an, so erhält man den Energie(erhaltungs)satz
T + U = T0 + U0 = E0 = const .
Er besagt, dass die Summe aus kinetischer und potentieller Energie zu jedem Zeitpunkt gleich groß
ist.
Kinetische Energie
~~ (A)
Ist für einen Punkt A eines starren Körpers die Geschwindigkeit ~vA sowie der Trägheitstensor Θ
bekannt, so lautet die kinetische Energie des Körpers
1
1
~~ (A)
m ~vA2 + ~vA · (~ω × ρ~S m) + ω
~ ·Θ
ω
~.
2
2
T =
Wird speziell der Schwerpunkt S als Bezugspunkt gewählt, so berechnet sich die kinetische Energie
zu
T =
1
m ~vS2
2
| {z }
+
translatorischer Anteil
1
~~ (S)
ω
~ ·Θ
ω
~ .
|2 {z }
rotatorischer Anteil
Ebene Sonderfälle
• Im ebenen Fall mit ω
~ = ω ~ez lautet die kinetische Energie mit dem Schwerpunkt S als Bezugspunkt
T =
1
m vS2
|2 {z }
translatorischer Anteil
+
1 (S) 2
Θzz ω
|2 {z }
.
rotatorischer Anteil
• Wird ein raumfester Punkt B oder der Momentanpol als Bezugspunkt verwendet, so gilt
T =
1 (B) 2
Θzz ω .
|2 {z }
reine Rotation um B
Potentiale
Für die folgenden konservativen Kräfte können Potentiale angegeben werden:
• Gewichtskraft (z -Achse nach oben, z0 = Nullniveau (NN)):
m
z
+z
g
z0 (NN)
U = mg (z − z0 ) .
• Linear elastische Feder mit der Federkonstanten c und Verlängerung/ Verkürzung x aus der entspannten Lage (x = 0):
U=
1 2
cx .
2
c
x
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 9
Freiheitsgrade
Ein System von Körpern, deren Lage durch (mindestens) f geometrische Größen vollständig beschrieben werden kann, besitzt f Freiheitsgrade.
Die Anzahl f der Freiheitsgrade eines Systems aus n Punktmassen und N starren Körpern mit r
Bindungen (z.B. Lager, Führungen) beträgt
f = 6N + 3n − r (im Raum)
bzw.
f = 3N + 2n − r (in der Ebene).
Lagrange’sche Gleichungen 2. Art
Die bisher behandelten Sätze (Schwerpunktsatz, Drallsatz, . . . ) gelten für freie Körper, auf die äußere
Kräfte wirken. Um damit Bewegungsgleichungen für Systeme aus Körpern aufzustellen, müssen diese
freigeschnitten werden. Mit den Lagrange’schen Gleichungen 2. Art lassen sich Bewegungsgleichungen ermitteln, ohne das betrachtete System freizuschneiden.
Verallgemeinerte Koordinaten
Zur vollständigen Beschreibung eines Systems mit f Freiheitsgraden sind f unabhängige Koordinaten,
die verallgemeinerten (generalisierten) Koordinaten notwendig. Diese werden im Folgenden mit qj ,
j = 1, 2, . . . , f bezeichnet.
Alle Ortsvektoren ~r lassen sich durch verallgemeinerte Koordinaten ausdrücken: ~r = ~r(q1 , q2 , . . . , qf ).
Bewegungsgleichungen
Zum Berechnen der f Bewegungsgleichungen eines Systems stellt man die Lagrange-Funktion
L=T −U
auf, wobei T die kinetische und U die potentielle Energie des Systems bezeichnen. Die Bewegungsgleichungen erhält man dann aus den Lagrange’schen Gleichungen 2. Art gemäß
d
dt
∂L
∂ q̇j
−
∂L
= Q∗j ,
∂qj
j = 1, 2, . . . , f .
~i∗ fließen auf der rechten Seite des GleiNicht-konservative Kräfte (z.B. Reibkräfte, Dämpferkräfte) F
chungssystems ein: Die verallgemeinerten nicht-konservativen Kräfte Q∗j berechnen sich zu
Q∗j =
X
i
∂~ri
,
F~i∗ ·
∂qj
~i bezeichnet.
wobei ~ri den Ortsvektor zum Angriffspunkt der Kraft F
Alternativ lässt sich Q∗j bestimmen, indem die virtuelle Arbeit δW ∗ der nicht-konservativen Kräfte aufgestellt
δW ∗ =
X
j
Q∗j δqj =
X
i
F~i · δ~ri ,
und ein Koeffizientenvergleich durchgeführt wird.
Institut für Angewandte
und Experimentelle Mechanik
Technische Mechanik III
FS 10
Schwingungen
ẍ + ω 2 x = 0
a) ungedämpft:
ω
T =
Eigen(kreis)frequenz
2π
ω
Schwingungsdauer
x(t) = C cos(ω t − ϕ)
C : Amplitude der freien Schwingung
ϕ: Nullphasenwinkel
x(t) = A cos(ω t) + B sin(ω t)
Lösung:
gleichwertig:
——————————————————————————————————————————–
ẍ + 2 δ ẋ + ω02 x = 0
b) gedämpft:
δ
ω0
ω=
Abklingkoeffizient
Eigen(kreis)frequenz ungedämpft
q
ω02 − δ 2 Eigen(kreis)frequenz gedämpft
δ
ω0
2π
T =
ω
D=
Λ = ln
Dämpfungsgrad (Lehr’sches Dämpfungsmaß)
Schwingungsdauer
x̂i
x̂i+1
D
Logarithmisches Dekrement,
1 − D2
dabei sind x̂i und x̂i+1 die Amplituden zweier aufeinander
= 2π √
folgender Ausschläge in gleicher Richtung
Lösung: Dämpfung
schwach:
0<D<1
gleichwertig:
stark:
D>1
aperiod. Grenzf.: D = 1
x(t) = C e−δ t cos(ω t − ϕ), C, ϕ s.o.
x(t) = e−δ t (A cos(ω t) + B sin(ω t))
x(t) = e−δ t A1 eµ t + A2 e−µ t
√
mit µ = ω0 D2 − 1
x(t) = e−δ t (B1 + B2 t)
————————————————————————————————————————————–
Erzwungene Schwingungen
DGL:
ẍ + 2 δ ẋ + ω02 x = F (t)
z.B. Kraftanregung
F (t) = F̂ cos(Ω t)
F̂ : Erregeramplitude
Ω: Erregerkreisfrequenz
η=
Lösung:
Ω
ω0
Frequenzverhältnis
x(t) = xh (t) + xp (t)
(homogene Lösung + partikuläre Lösung)