Rotation eines starren Körpers
Werbung

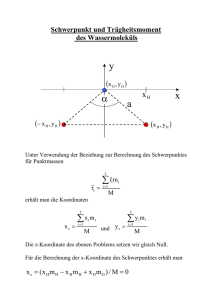
⃗ , J − Trägheitsmoment und Drehimpuls ⃗̇ M 2.23 Rotation eines starren Körpers: ω zip02-72//VORLESUNGEN/mewae-aktScr/Kap2_23/kap2_23_fs7 221103 Benötigte Formeln: ⃗ × B ⃗ = A ⃗C ⃗ B ⃗B ⃗ ⃗×C ⃗ − A ⃗ C 1.A ⃗ B ⃗ = B ⃗×A ⃗ = C ⃗ A ⃗×B ⃗→A ⃗×B ⃗, C ⃗ →D ⃗×C ⃗ C ⃗ für A ⃗, B ⃗→C ⃗: 2.A ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ ⃗ 3.A × BC × D = ACAD − BCAD für C = A, D = B: ⃗×B ⃗ 2B ⃗B ⃗ 2 = A ⃗ 2 − A ⃗ 2 4.A Einleitende Anmerkung. Die Bewegung eines starren Körpers kann durch Translation des Schwerpunkts, die den Gesetzen für die Bewegung eines Massenpunktes gehorcht, und der Rotation des Körpers um den Schwerpunkt beschrieben ⃗ , der ⃗ ) ist ein Drehmoment M werden. Ursache für eine Rotation (Änderung der Winkelgeschwindigkeit ω ⃗ wird durch das Trägheitsmoment J beschrieben.Während bei Widerstand gegen eine solche Änderung von ω der Translation der Widerstand eines Körpers gegen eine Änderung der Geschwindigkeit durch die skalare Größe sdeiner trägen Masse beschrieben wird, sind die Verhältnisse bei der Rotation komplizierter: zu jeder Rotationsachse ⃗e z gibt es ein dazugehöriges Trägheitsmoment J z des Körpers. Überträgt man auch die ⃗ Beziehung F = dp mit dem daraus resultierenden Erhaltungssatz für den Impuls in abgeschlossenen Systemen dt p definiert wird, so wird es in analoger Weise auf die Drehbewegung, in dem ein Drehimpuls als ⃗ L := ⃗r × ⃗ erforderlich, ein Trägheitsmoment mit 9 Komponenten einzuführen, um den Zusammenhang zwischen ⃗ vollständig zu beschreiben. Drehimpuls und der Massenverteilung des Körpers bei einem gegebenen ω ⃗ und resultierender Im folgenden soll zunächst der schon behandelte Zusammenhang zwischen Drehmoment M ⃗ dω Änderung der Winkelgeschwindigkeit dt in Abhängigkeit vom Trägheitsmoment J bei einer Rotation um eine feste Achse ⃗e z für einzelnes Teilchen in ⃗r noch einmal allgemein dargestellt werden: ⃗ kann wirken, andere Komponenten werden durch Gegenkräfte Feste Achse durch ⃗e z : nur z-Komponente von M im Lager kompensiert. ⃗ = Me⃗z mit M = ⃗r × F ⃗⃗e z = ⃗e z ⃗r × F ⃗ M nach Gl. 2 = ⃗⃗e z × ⃗r = F ⃗⃗e t |e⃗z × ⃗r| = F t |e⃗z × ⃗r| F (*) ⃗ = F t |e⃗z × ⃗r|e⃗z darin wird F t jetzt durch dω = ω̇ ausgedrückt: M dt ⃗ × ⃗r⃗e t = m dtd ω⃗e z × ⃗r⃗e t = m dtd ω|e⃗z × ⃗r|e⃗t⃗e t = m dtd ω|e⃗z × ⃗r| = m|e⃗z × ⃗r| ddtω F t = ma t = m dvdtt = m dtd ω =const obwohl ⃗r = ⃗rt ⃗ = m|e⃗z × ⃗r|2 ω̇ ⃗e z in (*) eingesetzt: M ω̇ = ⃗r Für ein System von Teilchen gilt entsprechend: Jz = ∑m ⃗ × ⃗e z 2 = i r i ∑m ρ i 2 i M m|e⃗z ×⃗r|2 mit ρ i =∣ ⃗r i × ⃗e z ∣ = M Jz mit J z = m|e⃗z × ⃗r|2 für eine einzelne Masse in Körper mit kontinuierlicher Massenverteilung ⃗rm ) Jz = ∫ V ρ 2 mdm = ∫ V |e⃗z × ⃗rm|2 dm Trägheitsmoment eines Körpers bei Rotation um z-Achse Drehimpuls: ⃗ = ⃗r × F ⃗ = ⃗r × ma⃗ = m⃗r × ⃗a = m⃗r × Es war: M = dtd ⃗r × mv⃗ = dtd ⃗r × ⃗p = dtd ⃗L mit dv⃗ dt = m dtd ⃗r × ⃗v ...( da ⃗v × ⃗v = 0! ) ⃗L := ⃗r × ⃗p ...Drehimpuls ⃗ = 0 : ⃗p = const. : für M ⃗ = 0 : ⃗r × ⃗p = const. dann ist analog zu: F ⋅ Auch eine geradlinige Bewegung mit ⃗ p = const hat daher i.a. einen Drehimpuls! ⃗ = dL M dt ⃗ ⃗ durch ω ⃗ × ⃗r eingesetzt: ⃗ ausgedrückt: ⃗v = ω Jetzt wird L ⃗L = m⃗r × ⃗v = m⃗r × ω ⃗ r 2 − ⃗r⃗r ⋅ ω ⃗ × ⃗r = mω ⃗ wegen(1). ⃗ ⃗! Wichtig: Das resultierende L ist also i.a. nicht parallel zu ω Anschauliche Erklärung: Gesamter Drehimpuls steht senkrecht auf ⃗r und ⃗e t : dann muß gelten ⃗ L⃗e r = ⃗ L⃗e t = 0 ⃗L = mr 2 ω⃗e ω − mr 2 ω⃗e r⃗e ω ⃗e r | ⋅⃗e r ⇒ mr 2 ω⃗e ω⃗e r − mr 2 ω⃗e r⃗e ω ⃗e r⃗e r = 0 q.e.d. 1 ⃗ Dabei ist mr 2 = J ω das Trägheitsmoment bezüglich der durch ω ⃗ ⃗ gilt offensichtlich: ⃗L = mr 2 ω Für ⃗r ⊥ ω definierten Achse wie oben definiert. ⃗ nicht parallel zu ω ⃗ : jede Komponente von ω ⃗ kann Beitrag zu jeder Komponente von L geben! Wenn L allgemein daher : L k = ∑J kl ⋅ ωl mit k, l = 1, 2, 3 J kl ....Trägheitstensor L, der nicht in der Aber: bei Symmetrie des Körpers um ⃗e z : zu jedem ⃗r gibt es ein ⃗r , dessen Beitrag zu ⃗ ⃗∥ω ⃗ Rotationsachse liegt, denjenigen von ⃗r kompensiert: Für eine Symmetrieachse gilt also immer: L ′ ⃗ gilt: ”Hauptträgheitsachsen” (ein Wichtig: es gibt für jeden Körper 3 orthogonale Achsen, für die ⃗ L∥ω körpereigenes System) ∑ die J kl bezüglich einer beliebigen Achse sind folgendermassen definiert: J kk = ∫r 2 − x 2k dm für k = 1, 2, 3 , r 2 = x 2k , also z.B. Jzz = y 2 + z 2 dm = ρ 2 dm ∫ ∫ ∫ J kl = − x k x l dm für k ≠ l ⃗ -Richtung als z-Achse gewählt: ω ⃗ = ω ⋅ ⃗e z (Ein Beispiel zum allgemeinen Fall: z.B. ω ⃗L = mr 2 ω⃗e z − mω ⋅ ⃗r⃗r⃗e z davon wird hier jetzt z.B. die z-Komponente bestimmt: ⋅⃗e z L z = mr 2 ω ⋅ 1 − mω⃗r⃗e z ⃗r⃗e z = mr 2 ω − ω⃗r ⋅ ⃗e z 2 = mω⃗r⃗r ⋅ ⃗e z⃗e z − ⃗r ⋅ ⃗e z 2 nach (4.) ist dies: = mω⃗r × ⃗e z 2 = J zz ⋅ ω mit J zz = m⃗r × ⃗e z 2 ...Trägheitsmoment bzgl. z-Achse, ⃗ = ω ⋅ ⃗e z , also ein ω ⃗ nur J zz ... Beitrag von ω z zur z_Komponente des Drehimpulses L z , denn wir hatten ja ω in z-Richtung angenommen und dazu die L z - Komponente berechnet, oder formal: ⃗ = ω ⋅ ⃗e z : L z = J zl ⋅ ω l = J zz ⋅ ω z wegen ω l = δ zk ω k . Für ω Die Diagonalelemente des Trägheitstensors = J kk mit k = x, y, z sind also die Trägheitsmomente J k bezüglich ∑ der k-Achse (k = x,y,z), J k = m⃗r × ⃗e k 2 wie oben definiert.) Wenn man im System der Hauptträgheitsachsen die Trägheitsmomente J bezüglich einer beliebigen Achse ⃗e k berechnet, so liegen die Punkte const ⃗e k auf einem Ellipsoid (”Trägheitsellipsoid”). J Mit dem Abstand R der Ellipsoidoberfläche vom Bezugspunkt entlang der Richtung ⃗e k kann also dann das Trägheitsmoment als J = const bestimmt werden. Schliesst die Achse mit den Hauptträgheitsachsen die Winkel R2 α, β und γ ein, so kann das Trägheitsmoment bezüglich dieser Achse sehr einfach aus den Trägheitsmomenten bezüglich der Hauptträgheitsachsen (den Hauptträgheitsmomenten des Körpers) J a , J b und J c berechnet werden als: J k = J a cos 2 α + J b cos 2 β + J c cos 2 γ Steiner’scher Satz: J bezüglich Achse durch Schwerpunkt aus Symmetriegründen meist relativ leicht berechenbar. Methode, J bezüglich anderer Achse zu berechnen: 0 liegt auf Achse, die nicht durch SP geht und durch ⃗e c gegeben ist. r⃗i = ⃗r sp + ⃗r ∗i Jc = m i r⃗i × ⃗e c 2 = m i ⃗r sp × ⃗e c + ⃗r ∗i × ⃗e c 2 = m i ⃗r sp × ⃗e c 2 + ⃗r ∗i × ⃗e c 2 + 2 +2⃗r sp × ⃗e c ⃗r ∗i × ⃗e c = m i ⃗r sp × ⃗e c + m i ⃗r ∗i × ⃗e c 2 + 2⃗r sp × ⃗e c m i⃗r ∗i × ⃗e c ∑ ∑ ∑ ρ SP ∑ ∑ J SP ⃗ 2sp +J sp∣∣⃗e c J c = M ⋅ρ ∑ = 0 per def. Beispiel zum Steinerschen Satz Wie groß ist J c ? Jc = 1 2 MR 2 + MR 2 = 3 2 MR 2 Kinetische Energie bei Rotation: ⃗ × ⃗r 2 = 12 mω 2 r 2 ⃗e ω × ⃗e r 2 = W kin = 12 mv 2 = 12 mω da∣ ⃗e ω × ⃗e r ∣= sin α, ρ = r ⋅ sinα 1 2 mρ 2 ω 2 System v. Teilchen: W kin = 12 J⋅ω 2 mit J= ∑ m i ⋅ ρ 2i ρ⃗ i = |r⃗i × ⃗e ω |e⃗r ; ρ i = r i ⋅ sin α i