Physikalisches Fortgeschrittenenpraktikum Einstein
Werbung

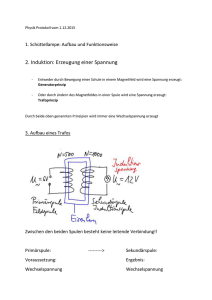
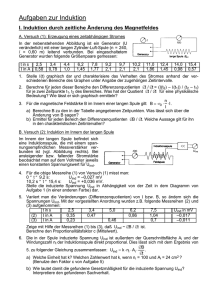
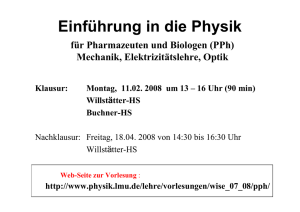
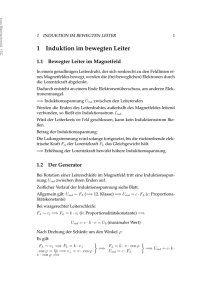
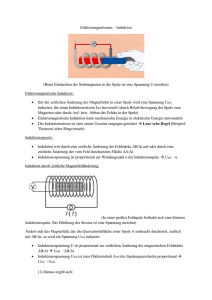
Physikalisches Fortgeschrittenenpraktikum Einstein-de Haas-Effekt Gruppe 22 Tobias Großmann Marc Ganzhorn Durchführung: 22.05.2007 1 Inhaltsverzeichnis 1 Theoretische Grundlagen 1.1 Verschiedene magnetische Phänomene 1.1.1 Diamagnetismus . . . . . . . . 1.1.2 Ferromagnetismus . . . . . . . 1.1.3 Paramagnetismus . . . . . . . . 1.2 Bestimmung des g-Faktors . . . . . . . 1.3 Torsionsschwingung . . . . . . . . . . 1.4 Magnetisierungsänderung . . . . . . . 1.4.1 Ballistische Messung . . . . . . 1.4.2 Numerische Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Versuchsaufbau 3 3 3 3 3 3 4 4 5 5 6 3 Durchführung 3.1 Resonanzfrequenz und Abklingzeit . . . . . . . . . . . 3.2 Kompensation des Erdmagnetfeldes . . . . . . . . . . 3.3 Ballistische Messung . . . . . . . . . . . . . . . . . . . 3.4 Graphische Auswertung mit Oszilloskop und Rechner . . . . . 6 6 7 7 8 4 Auswertung und Fehlerrechnung 4.1 Resonanzfrequenz und Abklingzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Bestimmung des g-Faktors durch ballistische Messung . . . . . . . . . . . . . . . . 4.3 Graphische Bestimmung von g . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 9 10 13 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Theoretische Grundlagen Dieser Versuch wurde erstmals 1915 von A. Einstein und W. de Haas durchgeführt und sollte beweisen, dass das Phänomen des Ferromagnetismus auf das magnetische Moment der einzelnen Elektronen zurückzuführen ist. Dabei lässt sich auch der g-Faktor bestimmen. Ausgehend von dieser Annahme, sollten sich die magnetischen Momente in der Probe entlang eines äußeren Magnetfeldes ausrichten, was Aufgrund der Gesamtdrehimpulserhaltung im System der Probe zu einer Rotation des Stabes führt. Aus der Rotationsbewegung lässt sich dann der g-Faktor bestimmen. 1.1 1.1.1 Verschiedene magnetische Phänomene Diamagnetismus Der Diamagnetismus beruht auf der Induktion von magnetische Momenten in einem Körper aufgrund eines äußeren Magnetfeldes. Ein inhomogenes Magnetfeld verursacht ein elektrisches Wirbelfeld, das auf die Elektronen im Festkörper ein beschleunigende oder abbremsende Wirkung hat (abhängig von der Bewegung relativ zum Wirbelfeld). Im ersten Fall wird das magnetische Moment des Elektrons verstärkt, im zweiten geschwächt. In beiden Fällen wirkt die Änderung dem äußeren Feld entgegen und die Probe wird in Regionen geringerer Feldstärke getrieben. Prinzipiell sind alle Stoffe diamagnetisch, jedoch ist der Effekt wesentlich geringer als z.B. Para- oder Ferromagnetische Effekte. Ein Supraleiter ist ein idealer Diamagnet der unterhalb einer Sprungtemperatur und kritischer Feldstärke das Magnetfeld aus dem Leiter verdrängt. 1.1.2 Ferromagnetismus In ferromagnetischen Stoffen führt die Coulomb-Wechselwirkung, sowie die magnetische Dipolwechselwirkung bei geringer thermischer Energie zu einer magnetischen Ordnung. Es kommt zu einer Domänenbildung. Legt man ein Magnetfeld minimaler Stärke an die Probe an, so richten sich sämtliche magnetische Momente innerhalb einer Domäne aus. Erhöht man die Feldstärke, richten sich immer mehr Domänen aus bis alle ausgerichtet sind und eine Sättigung eintritt. Dabei wird das angelegte Magnetfeld stark verstärkt. Bei Abschalten des Magnetfeldes bleibt aufgrund der Wechselwirkungen eine Restmagnetisierung (Remanenz) übrig. Die Domänen verschwinden wieder falls die thermische Energie die Wechselwirkungsenergie kompensiert (bei Eisen bei ca. 1040 K). Ferromagneten werden in der Regel oberhalb der Curie-Temperatur zu Paramagneten. 1.1.3 Paramagnetismus Dieses Phänomen beruht auf der Ausrichtung permanenter magnetischer Momente an einem äußeren Magnetfeld. Im Gegensatz zu Diamagneten verstärkt sich dabei das angelegte Magnetfeld und die Probe wird in inhomogenen Felder in Regionen höherer Feldstärke geschoben. Da der Paramagnetismus oft erst bei hohen Temperaturen auftritt, handelt es sich bei solchen Stoffen meist um Gase und Flüssigkeiten und nicht um Festkörper. 1.2 Bestimmung des g-Faktors Der g-Faktor ist proportional zum Verhältnis aus magnetischem Moment µ und Drehimpuls L: g= −2me µl e L 3 Mit Hilfe kleinerer Umformungen kann der g-Faktor durch experimentell messbare Größen ausgedrückt werden: g= −2me Ṁmax VStab e Dmax (1) Ṁmax stellt die maximale zeitliche Ableitung der Magnetisierung dar und Dmax ist das maximale Drehmoment. Das Volumen der stabförmigen Probe bezeichnen wir mit VStab . 1.3 Torsionsschwingung Um Dmax zu bestimmen, betrachtet man die Torsionsschwingung der an einem Glasfaden aufgehängten Probe. Die Probe befindet sich in einer Spule, in der ein Strom fließt. Das resultierende Magnetfeld bewirkt ein Umklappen der magnetischen Momente bzw. der Drehimpulse in der Probe. Aufgrund der Drehimpulserhaltung kommt es zu einer makroskopischen Torsionsschwingung des Stabes. Diese Schwingung wird durch folgende Differentialgleichung beschrieben: 2 D α̇ + ω02 α = cos(ωt) τ θ Im Resonanzfall gilt damit folgende Relation: α̈ + Dmax = 2ωres αres θ τ (2) Dabei bezeichnet θ = 12 mr2 das Trägheitsmoment des Stabes und τ die Abklingzeit der Schwingung. ωres und αres werden direkt gemessen. Abbildung 1: Resonanzkurve gedämpfte Schwingung Die Abklingzeit τ wird aus der Dämpfung der Amplitude ermittelt: τ= 1.4 t α0 ) ln( α(t) Magnetisierungsänderung Aufgrund der Hystereseeigenschaft des ferromagnetischen Stabes, wird der Verlauf von Ṁ periodische δ-förmige Peaks aufweisen. Dadurch kann Ṁ in eine Fourierreihe entwickelt werden, welche sich im Resonanzfall auf die Grundschwingung reduzieren lässt: µ Ṁmax ≈ 4 dM dt ¶ 1 Abbildung 2: Fourierzerlegung einer Schwingung ¡ dM ¢ lässt sich sowohl durch ballistische Messung mit Hilfe eines Galvanometers, als auch durch numerische Integration mit Hilfe des Oszilloskops bestimmen. dt 1.4.1 1 Ballistische Messung Die erste Fourierkomponente kann durch die Sättigungsmagnetisierung MS berechnet werden: µ dM dt ¶ =− 1 8MS T Die Sättigungsmagnetisierung kann wiederum durch die an einer Induktionsspule gemessen Spannung Uind bestimmt werden. Damit ergibt sich: µ dM dt ¶ =− 1 4 T µ0 N2 FSt Z T /2 Uind dt + 0 8N1 I0 FSp T l FSt (3) Die Induktionsspule im Inneren der Feldspule ist an das Spiegelgalvanometer angeschlossen. Das Galvanometer wirkt dabei wie ein Integrierglied. Damit kann der Wert des Integrals aus obiger Gleichung bestimmt werden. Alle restlichen Parameter des Systems sind gegeben. 1.4.2 Numerische Integration ¡ ¢ Eine zweite Methode dM dt 1 zu messen besteht darin die Flächen unterhalb der Induktionsspannungskurve am Oszilloskop numerisch zu berechnen. Die numerische Integration wird an einem ¡ ¢ PC, der die Daten vom Oszilloskop bezieht, durchgeführt. Für dM dt 1 gilt damit: µ dM dt ¶ =− 1 2K µ0 N2 FSt T Z T Uind sin(ωres t)dt + 0 N1 I0 ωres FSp FSt l Dabei ist K der Eichfaktor, der sich folgendermaßen berechnen lässt: R T /2 Uind dt(Galvanometer) K = 0R T /2 Uind dt(Oszilloskop) 0 5 (4) 2 Versuchsaufbau Der wichtigste Teil des Versuchsaufbaus besteht aus einem Eisenstab, der an einem sehr empfindlichen Glasfaden aufgehängt ist. Der Eisenstab ist möglichst zentral in der Feldspule justiert. Zusätzlich hängt der Stab in einer Induktionsspule. Um die Amplitude der Torsionsschwingung sinnvoll zu messen, ist an der Probe ein Spiegel angebracht. Der Laserstrahl trifft genau auf den Spiegel und wird anschließend auf den Schirm reflektiert. Je nach Schwingungsfrequenz sieht man entweder die Schwingung des Laserpunktes oder einen Lichtstreifen, dessen Länge gemessen werden kann. Da die Probe sehr empfindlich auf Magnetfelder reagiert, wird das Erdmagnetfeld mit Hilfe eines Helmholtzspulenpaars möglichst gut kompensiert. Die Messung der Magnetisierungsänderung wird sowohl mit Hilfe eines ballistischen Spiegelgalvanometers als auch mit Oszilloskop und Computer durchgeführt. 3 3.1 Durchführung Resonanzfrequenz und Abklingzeit Um die Resonanzfrequenz grob zu finden, haben wir zunächst den kompletten Bereich des Frequenzgenerators (40 ms bis 80 ms) in 5 ms-Schritten abgesucht. Anschließend untersuchten wir den Bereich bei ca. 42 ms nochmals genauer in kleineren Schritten. Bei der Messung haben wir das Erdmagnetfeld nicht kompensiert, da die Amplitude dann größer ist. Im Folgenden ist mit Amplitude die gesamte Länge des Lichtstriches gemeint, also die doppelte Amplitude. Wir erhielten folgende Messwerte: Periode [ms] 40 45 50 55 60 65 70 75 41 42 42,5 42,6 42,7 42,74 42,76 42,78 42,8 42,82 42,84 42,86 42,88 42,9 Amplitude [mm] 5 6 5 5 5 7 5 7 6 8 18 19 40 60 80 105 100 90 85 28 25 23 6 Die Periode der Resonanzamplitude liegt damit bei Tres = 42, 78 ms Bei der Messung der Resonanzamplituden ist noch anzumerken, dass es sehr schwer war vernünftige Werte zu messen. Da der Eisenstab nicht vollkommen in einer Linie mit dem Glasfaden ausgerichtet war, war der Torsionsschwingung stets eine Schwebung überlagert. Dies hatte zur Folge, dass sich die Amplitude der Schwingung stets änderte. Wir waren bemüht konsistent den maximalen Ausschlag zu messen. Leider mussten wir während der Messung feststellen, dass unsere Messungen nicht immer reproduzierbar waren, obwohl wir die Einschwingzeit des Systems stets beachtet haben. Die Schrägstellung des Eisenstabs konnte aufgrund der hohen Sensibilität des Glasfadens nicht korrigiert werden. Die Gefahr, dass der Faden reißt war zu groß. Zudem achteten wir darauf, dass der Stab stets in der Mitte der Spule hing. Dies konnte man mit Hilfe eines kleinen Spiegels unterhalb der Spule sehen. Anschließend haben wir die Abklingzeit τ der Schwingung gemessen. Wir maßen mit Hilfe der Stopuhr am Frequenzgenerator die Zeit bis die Amplitude A(t = 0) der Schwingung auf etwa A(t = 0)/e abgefallen war. Wir erhielten folgende Messwerte: τ [s] 41,9 38,4 34,7 Der Mittelwert und die Standardabweichung des Mittelwerts der Abklingzeit ergeben sich damit zu τ = (38, 33 ± 2, 07) s 3.2 Kompensation des Erdmagnetfeldes Um das Magnetfeld der Erde zu kompensieren, maßen wir die Resonanzamplitude bei verschiedenen Strömen IH durch die Helmholtzspule. Der Strom durch die Feldspule betrug dabei Ief f = 0, 6A. Wir erhielten folgende Messwerte: IH [A] 0,3 0,4 0,5 Resonanzamplitude [mm] 100 60 95 Für die weiteren Messungen ließen wir den Stom an dem Helmholtzspulenpaar auf IH = 0, 4A eingestellt, da bei diesem Wert das Erdmagnetfeld maximal kompensiert wurde. 3.3 Ballistische Messung Zunächst eichten wir das Galvanometer. Dazu wurde die Schaltung wie auf der Schaltskizze der Vorbereitungshilfe aufgebaut. Anschließend wurde der Kondensator mit 4 verschiedenen Spannungen bzw. Ladungen aufgeladen und über das Galvanometer, das parallel zur Induktionspule geschaltet war, entladen. Dabei wurde jeweils die maximale Auslenkung des Galvanometers gemessen: 7 U [V] 3,0 6,0 9,2 12,0 Auslenkung [mm] 17 41 51 67 Anschließend haben wir für verschiedene Gleichströme an der Feldspule den Ausschlag des Galvanometers abgelesen. Daraus kann dann das Integral der Induktionsspannung über die Zeit berechnet werden. IDC [A] 0,56 0,71 0,84 3.4 Auslenkung [mm] 88 87 90 91 94 96 98 99 100 Graphische Auswertung mit Oszilloskop und Rechner Im letzten Aufgabenteil war die Induktionsspule am Oszilloskop angeschlossen. Das Signal vom Oszilloskop wurde an den Rechner durchgeschleift und dort mit Hilfe der Software F reeCapture aufgenommen und gespeichert. Wir erhielten zwei Kurven. Die erste Kurve ist die an die Feldspule angeschlossene sinusförmige Wechselspannung mit der Periode der Resonanzamplitude. Die zweite Kurve stellt die induzierte Spannung dar. Die Kurven wurden jeweils bei Ief f = 0,4 A, 0,5 A und 0,6 A aufgenommen. Dabei war zu beachten, dass die y-Achse noch mit dem Faktor 25 multipliziert werden musste, da ein 1/25- Dämpfer am Ausgang des Oszilloskops angeschlossen war. Der Verlauf der Kurven sieht wie folgt aus: 8 4 4.1 Auswertung und Fehlerrechnung Resonanzfrequenz und Abklingzeit Trägt man die Messwerte in Abschnitt 3.1 gegeneinander auf, erhält man für den Verlauf der Resonanzkurve folgenden Verlauf: 9 Löst man den Bereich um den Resonanzpeak höher auf, nimmt die Kurve folgenden Verlauf an: Die Abweichung vom typischen Verlauf einer Resonanzkurve ist auf die in der Durchführung bereits erwähnte Schwebung der Schwingung zurückzuführen. Das Maximum der Resonanzamplitude liegt bei Tres = 42, 78 ms oder ωres = 146, 87 Hz Die Abklingzeit der Schwingung liegt bei τ = (38, 33 ± 2, 07) s 4.2 Bestimmung des g-Faktors durch ballistische Messung Rechnet man die in Abschnitt 3.3 angegebenen Spannungen in Ladungen um, erhält man folgende Messwerte: Ladung [µ C] 90 180 276 360 Auslenkung [mm] 17 41 51 67 Der verwendete Kondensator hatte eine Kapazität von C = 30µF . Trägt man diese Werte gegeneinander auf, so erhält man die Eichgerade, mit der die Auslenkungen am Oszilloskop in Ladungen umgerechnet werden können: 10 Der lineare Fit wurde mit Origin gemacht. Die Gleichung der Geraden lautet: y = 5, 50 µC/mm · x − 15, 63 µC Für die in Kapitel 3.3 angegebenen Auslenkungen erhält man folgende Mittelwerte mit den entsprechenden Standardabweichungen: IDC [A] 0,56 0,71 0,84 Auslenkung [mm] 88,33 ± 0,88 93,67 ± 1,45 99,00 ± 0,58 Ladung [µ C] 470,47 ± 97,17 499,82 ± 103,93 529,17 ± 102,73 Mit diesen Werten lässt sich nun der g-Faktor berechnen. Setzt man die in den theoretischen Grundlagen angebene Formel (3) in Formel (1) ein, erhält man folgende Relation für g: 4me τ V g= µ0 πeΘαres FSt à µ0 FSp N1 IDC 1 − + l N2 Z T /4 ! Uind dt 0 Da das Galvanometer als Integrierglied wirkt, kann das obige Integral wie folgt berechnet werden: Z T /4 Uind dt = Rges · Q 0 Rges ist der Ersatzwiderstand der Schaltung und kann angegeben werden als 11 RSp (R + RGalv ) = 36, 86Ω RSp + R + RGalv wobei R = 9, 5 kΩ, RSp = 37 Ω und RGalv = 25 Ω ist. Für die Berechnung des g-Faktors setzen wir folgende Konstanten ein: Rges = • V = 3, 14 · 10−6 m3 • Θ = 5 · 10−8 kg · m2 • FSt = 1, 25 · 10−5 m2 • FSp = 7, 54 · 10−4 m2 Den maximalen Auslenkwinkel im Resonanzfall αres lässt sich folgendermaßen berechnen: x α = arctan( )/2 L wobei x die Auslenkung des Lichtstreifens und L den Abstand vom Laser zum Schirm bezeichnen. L haben wir zu L = (4, 5 ± 0, 1) m gemessen. Damit ergibt sich ein αres von αres = (6, 67 ± 1, 25) · 10−3 rad Setzt man alle obigen Werte in die Formel für den g-Faktor ein, so erhalten wir für die drei verschieden Ströme folgendes Ergebnis: IDC [A] 0,56 0,71 0,84 g-Faktor 2,32 ± 1,16 2,34 ± 1,21 2,39 ± 1,22 Die Unsicherheit für den g-Faktor haben wir durch eine Größstfehlerabschätzung berechnet. Dies hielten aufgrund der Korrelation der Messgrößen für ein geeignetes Verfahren. Der Fehler des g-Faktors ergibt sich damit zu ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ¯ ∂g ¯ ¯ ∂g ¯ ¯ ∂g ¯ ¯ ¯ ¯ δQ + ¯ ∂g ¯ δI δg = ¯¯ ¯¯ δα + ¯¯ ¯¯ δτ + ¯¯ ¯ ¯ ∂I ¯ ∂α ∂τ ∂Q Für die Unsicherheiten der Messgrößen haben wir folgende Werte angenommen: • δα = 1, 25 · 10−3 rad • δτ = 2, 07 s • δI = 0, 01 A • δQ : aus obiger Tabelle Die drei Ergebnisse für den g-Faktor kann man schließlich noch durch die Bildung des gewichteten Mittelwerts zusammenfassen. Man erhält damit: g = 2, 35 ± 0, 69 Die ist ein akzeptables Ergebnis, da der Literaturwert von g w 2, 0 innerhalb der Fehlertoleranz liegt. 12 4.3 Graphische Bestimmung von g Für den zeitlichen Verlauf der induzierten Spannung |Uind | und für den Verlauf von |Uind · sin(ωt)| erhält man folgende Plots: 13 Der Verlauf der Kurve für Ief f = 0, 6 A sieht fast gleich aus. Die Kurven für Ief f = 0, 5 A können leider aufgrund eines Speicherfehlers nicht verwendet werden. Mit Hilfe von Origin wurden für die beiden Ströme Ief f = 0, 4 A und Ief f = 0, 6 A die Fläche unterhalb von beiden Kurven berechnet: RT RT Ief f [A] |Uind |dt |Uind · sin(ωt)|dt 0 0 0,4 1,929 1,684 0,6 2,152 1,942 Aus diesen Werten lässt sich nun der g-Faktor nach folgender Formel berechnen: me τ V g= µ0 eΘαres à K πN2 FSt Z T 0 µ0 N1 I0 FSp |Uind · sin(ωt)|dt − lFSt ! Der Eichfaktor K wird mittels Gleichung (5) bestimmt: R T /2 Uind dt(Galvanometer) K = 0R T /2 Uind dt(Oszilloskop) 0 Mit den in Kapitel 4.2 angegebenen konstanten Größen erhält man folgendes Ergebnis: Ief f [A] 0,4 0,6 g-Faktor 2,02 ± 1,03 2,26 ± 1,12 14 Auch hier wurde die Unsicherheit von g mit Hilfe des Größstfehlers abgeschätzt: ¯ ¯ ¯ ¯ ¯ ¯ ¯ ∂g ¯ ¯ ∂g ¯ ¯ ∂g ¯ ¯ ¯ ¯ ¯ δg = ¯ ¯ δα + ¯ ¯ δτ + ¯¯ ¯¯ δI ∂α ∂τ ∂I Die Fehler für die α, τ und I sind gleich wie im vorherigen Kapitel. Bildet man noch schließlich den gewichteten Mittelwert aus beiden Größen, erhält man als Endergebnis: g = 2, 15 ± 0, 76 Dieser Wert liegt noch genauer am Literaturwert als mit der Galvanometer-Methode. Somit bleibt festzuhalten, dass die Methode mit dem sensiblen Galvanometer wesentlich ungenauer ist, als die graphische Auswertung per Rechner. Unsicherheiten sind bei beiden Methoden ungefährt gleich groß. Dies liegt unter anderem an der nur schwer ablesbaren Auslenkung des Stabes aufgrund der starken Schwebung der Schwingung. Zum Anderen bräuchte man für eine genauere Bestimmung einfach mehr Messwerte. Trotz allem ist das Ergebnis für den g-Faktor mit dieser Messmethode recht zufriedenstellend. 15