3 Elektrische und magnetische Felder
Werbung

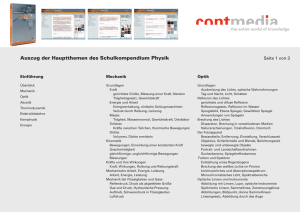
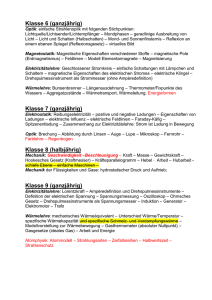
Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder 3 Elektrische und magnetische Felder Ein Raum, in dem Kräfte auf Körper einwirken, wird Kraftfeld genannt. Solche Felder können verschiedene Ursachen haben: Gravitationsfeld: Massen Elektrisches Feld: Ruhende elektrische Ladungen Magnetisches Feld: Bewegte elektrische Ladungen (elektrische Ströme) Bei zeitlicher Änderung sind elektrisches und magnetisches Feld miteinander verknüpft. Die Übertragung und Umwandlung elektrischer und magnetischer Energie sind auf die Wirkung elektromagnetischer Felder zurückzuführen. 3.1 Das elektrische Feld 3.1.1 Kraftwirkung im elektrischen Feld Im ruhenden elektrischen Feld wird auf geladene Körper eine Kraft ausgeübt. Die Kraft hängt dabei von der Größe der Ladung und vom Ort ab. Coulomb entdeckte, dass für die Kraftwirkung zwischen zwei Punktladungen im Abstand r gilt: F~ Q1 ⋅ Q 2 ⋅ er r2 (3.1) Bei Einführung der Proportionalitätskonstanten ε ergibt sich: F= 1 Q1 ⋅ Q 2 ⋅ er ⋅ 4πε r2 (3.2) Positive Ladungen stoßen sich mit der Kraft F in Richtung des Abstands ab, negative Ladungen ziehen sich mit der Kraft F in Richtung des Abstands an. Wenn nun eine der beiden Ladungen als Ursache des elektrischen Feldes gedeutet wird, kann die Kraft auf die andere Ladung durch einen elektrischen Feldstärkevektor beschrieben werden: F = Q⋅E (3.3) Durch Bewegung einer Ladung und Messung der Kraft wird das Feld bestimmt. Das E-Feld hat an jeder Stelle des Raumes eine Richtung (Vektorfeld). Es wird durch Feldlinien dargestellt (Richtung von + nach −). Elektrische Feldlinien haben ihren Ursprung (Quelle) und ihr Ende (Senke) in elektrischen Ladungen. Aufgrund dieser Eigenschaft ist das elektrostatische Feld ein Quellenfeld. Die Feldliniendichte in der Darstellung ist ein Maß für die Intensität des Feldes (Feldstärke). Die Tangente an die Feldlinien gibt die Kraftrichtung an. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-1 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Die E-Feldlinien stehen senkrecht auf den Leitern und sind von + nach – gerichtet. Die Linien konstanten Potentials (Äquipotentiallinien, gestrichelt) stehen senkrecht auf den Feldlinien. Von einem beliebigen Punkt einer ersten zu einer zweiten Äquipotentiallinie wird immer dieselbe Spannung gemessen. Feldlinien zwischen 2 parallelen zylindrischen Leitern Bild 3.1 Elektrisches Feld zweier entgegengesetzt mit den jeweiligen Ladungen Q geladene Kugeln mit dem Durchmesser d im Abstand a: Beispiel 1: Das vom linken Leiter im Abstand x = 0 vom Ursprung verursachte Feld im Raum außerhalb des Leiters beträgt: E− = −Q 4πε ⋅ r− 2 −Q ⋅ er = ( 4πε ⋅ x 2 + y 2 ) 3 2 x ⋅ y (3.4) Das vom rechten Leiter im Abstand x = a vom Ursprung verursachte Feld im Raum außerhalb des Leiters beträgt: E+ = Q 4πε ⋅ r+ 2 Q ⋅ er = ( 4πε ⋅ (x − a ) + y 2 3 2 2 ) x − a ⋅ y (3.5) Das Gesamtfeld im freien Raum erhält man durch Überlagerung: E = E− + E+ (3.6) Zwischen zwei beliebigen Punkten 1 und 2 des E-Feldes existiert eine Spannung. Diese Spannung ist vom Weg von 1 nach 2 unabhängig (wirbelfreies Feld). U12 = ∫ E ⋅ d l = ϕ1 − ϕ 2 2 (3.7) 1 Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-2 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Fortsetzung von Beispiel 1: Ermittlung der Spannung zwischen den Oberflächen der Kugeln. Der einfachste Integrationsweg ist die x-Achse: Ex y=0 = a− Q 1 1 Q a 2 − 2ax ⋅ 2 − = ⋅ 4πε x (x − a )2 4πε x 2 − a 2 2 ( ) d 2 4Q a2 U = ∫ E x y=0 dx = ⋅ 2 πε a − d 2 ⋅ (3a − d ) d ( (3.8) (3.9) ) 2 Für d<<a erhält man: U≈ 4Q 3πεa (3.10) Komplexere Feldverläufe werden heute meist mit Hilfe numerischer Feldberechnung behandelt. Im Sonderfall eines homogenen Feldes vereinfacht sich die Gleichung (3.7) zu der bereits aus Kapitel 1 bekannten Formulierung U = E ⋅ l . Ladungen sind in Leitern frei beweglich. Sie werden solange verschoben, bis keine tangentiale Kraftkomponente an der Leiteroberfläche mehr auftritt. Daher sind die Oberflächen metallischer Leiter Äquipotentialflächen, auf denen die E-Feldlinien senkrecht stehen. Im Inneren idealer Leiter ist das E-Feld Null. Dies gilt auch für Hohlräume in Leitern (Faraday’scher Käfig). Dies hat einige praktische Auswirkungen: Ein Auto ist ein Faradayscher Käfig. Daher ist man im Fahrzeuginnern vor Blitzen geschützt. Die Funktion von Mobiltelefonen ist in Stahlbetonbauwerken meist eingeschränkt. Der Faradaysche Käfig funktioniert nur, wenn im Innern des Hohlraums keine Ladungsanhäufungen auftreten! Bild 3.2 Feldfreiheit im Innern eines elektrischen Leiters (Faradayscher Käfig) Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-3 Einführung in die Elektrotechnik Teil I 3.1.2 Kapitel 3: Elektrische und magnetische Felder Kondensator Ein Kondensator besteht aus zwei entgegengesetzt geladenen Leiteroberflächen, die voneinander isoliert sind. Die Geometrie ist beliebig. Durch Anlegen einer Spannung werden Ladungsträger an den Leiteroberflächen gespeichert. Mit Hilfe von Experimenten kann nachgewiesen werden, dass die Ladung der Spannung proportional ist. Die Proportionalitätskonstante wird Kapazität genannt: Q = C⋅U (3.11) Formelzeichen: C Einheit: [C] = 1 F (Farad) Das Schaltzeichen für einen Kondensator besteht aus zwei parallelen Linien. C Bild 3.3 Schaltzeichen für einen Kondensator Fortsetzung zu Beispiel 1: Kapazität zwischen zwei Kugeln im Abstand a (Näherung für d<<a): C= Q 3π ⋅ ε ⋅ a ≈ U 4 (3.12) Die Größe der Kapazität ist nur von der Geometrie und dem Material abhängig. Am einfachsten ist der Fall des Plattenkondensators zu betrachten. Dieser besteht aus zwei leitenden Platten (Elektroden) der Fläche A, die sich im Abstand l gegenüberstehen. Zwischen den Elektroden wird eine Spannung U angelegt. Leiter l U E Bild 3.4 Leiter Aufbau eines Plattenkondensators Es zeigt sich, dass die Kapazität des Kondensators proportional der Fläche der Elektroden und umgekehrt proportional ihrem Abstand ist. C = ε⋅ A l Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung (3.13) 3-4 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Die Proportionalitätskonstante ε wird Dielektrizitätskonstante genannt. Bei unterschiedlichen Isolatoren im Feld zwischen den Elektroden werden unterschiedliche Kapazitäten gemessen. Daher ist ε eine Materialkonstante. Sie wird meist als Produkt aus der absoluten Dielektrizitätskonstante im Vakuum ε0 und einer materialspezifischen relativen Dielektrizitätskonstante εr angegeben: ε = ε0 ⋅ εr (3.14) Dielektrikum Dielektrizitätskonstante εr Luft 1 Durchschlagsfeldstärke ED [kVm-1] 3.000 Öl 2,2..2,6 20.000 Wasser 80 unpolare Kunststoffe (PE,PTFE) polare Kunststoffe (PVC) Papier 40.000 15.000 Aluminiumoxid Al2O3 2...2,5 2,5...6 ≈4 8..9,5 Kondensatorkeramik ND Kondensatorkeramik ND (BaTiO3) 40...60 1000...4000 10.000...40.000 5.000 Tabelle 3.1 Dielektrizitätskonstante und Durchschlagfeldstärke wichtiger Dielektrika. Für Kondensatoren wurden verschiedene Bauformen entwickelt. Meist werden Wickel (zylindrisch) oder Stapel (quaderförmig) verwendet. Bild 3.5 a) Kondensator in Wickelbauweise b) Kondensator in Stapelbauweise Der Materialabhängigkeit der Ladung wird durch Einführung einer weiteren Feldgröße Rechnung getragen, die elektrische Verschiebungsdichte genannt wird: D = ε⋅E (3.15) Formelzeichen: D Einheit: [D] = 1 Asm-2 Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-5 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Die Verschiebungsdichte D beschreibt anschaulich die Dichte der Ladungsträger auf der Elektrodenoberfläche. Für die gesamte Ladung Q auf der betreffenden Fläche gilt: Q = ∫ D ⋅ dA (3.16) A 3.1.2.1. Kapazitätsberechnung an Beispielen Für gewisse Anwendungsfälle strebt man in der Praxis Anordnungen mit möglichst großer Kapazität an. Sinn dieser Anordnungen ist, dass man bei relativ kleiner Spannung eine möglichst große Ladungsmenge speichern kann. Eine Vorgehensweise zur Berechnung von Kapazitäten wird nachfolgend anhand einiger praktischer Beispiele verdeutlicht. Beispiel 1: Der Plattenkondensator Die Anordnung eines Plattenkondensators wurde bereits im Bild 3.4 gezeigt. Nachfolgend wird nur der homogene feldbehaftete Raum mit der Dielektrizitätszahl ε zwischen den Platten betrachtet (Bild 3.6): l -Q Q Bild 3.6 2 1 E, D ε Feld zwischen den Platten eines Plattenkondensators und Hüllfläche um eine Platte zur Bestimmung der dielektrischen Verschiebungsdichte D Hüllfläche Die Betrachtung der Hüllfläche gemäß Bild 3.6 um die Platte mit der Fläche A liefert: Q = ∫ D ⋅ dA = D ⋅ A (3.17) A Mit der dielektrischen Verschiebungsdichte D ergibt sich für die elektrische Feldstärke E: E= D ε (3.18) Für die Spannung zwischen den Platten 1 und 2 ergibt sich gemäß Gleichung (3.7): 2 U = ∫ E ⋅ dl = E ⋅ l = 1 D ⋅l ε (3.19) Aus (3.17) und (3.19) ergibt sich mit der Definitionsgleichung (3.11) für die Kapazität: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-6 Einführung in die Elektrotechnik Teil I C= Kapitel 3: Elektrische und magnetische Felder Q D⋅A A A = = ε ⋅ = ε0 ⋅ εr ⋅ U D l l ⋅l ε (3.20) Beispiel 2: Der Kugelkondensator Ein Kugelkondensator besteht aus sich zwei konzentrisch umschließenden Kugelflächen mit den Radien ri und ra, welche aus leitfähigem Material bestehen. Zwischen diesen leitfähigen Kugelschalen wird eine Spannung U angelegt, woraufhin sich auf den Flächen elektrische Ladungen anhäufen und sich die elektrischen Feldlinien ausbilden. Auf der inneren Kugel mit dem Radius ri befinde sich die Ladungsmenge + Q, auf der äußeren Kugel mit dem Radius ra befinde sich die entsprechende gegengesetzte Ladungsmenge – Q. In Bild 3.7 ist dies schematisch dargestellt: ra ri E, D, ε Bild 3.7 Schnitt durch einen Kugelkondensator mit angedeutetem Feldlinienverlauf Wird nun im feldbehafteten Raum zwischen ri und ra im Abstand r eine virtuelle Kugelfläche betrachtet, so lässt sich nach Gleichung (3.17) die Stärke der dielektrischen Verschiebung D berechnen. Es gilt für das kugelsymmetrische Feld: Q = ∫ D ⋅ dA = D ⋅ A = D ⋅ 4 ⋅ π ⋅ r 2 (3.21) A Für den Betrag der elektrischen Feldstärke folgt damit: E= D Q = ε 4⋅π⋅ε ⋅r2 (3.22) Für die Spannung zwischen den Kugelschalen ergibt sich gemäß Gleichung (3.7): r a − Q 1 a −Q 1 1 Q Q 1 U = ∫ E ⋅ dr = ∫ ⋅ dr = ⋅ ⋅ dr = ⋅ = ⋅ − 2 ∫ 2 4 ⋅ π ⋅ ε ri r 4 ⋅ π ⋅ ε r ri 4 ⋅ π ⋅ ε ra ri ri ri 4 ⋅ π ⋅ ε ⋅ r ra ra r (3.23) Wiederum ergibt sich mit der Definitionsgleichung (3.11) für die Kapazität: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-7 Einführung in die Elektrotechnik Teil I C= Kapitel 3: Elektrische und magnetische Felder Q 4 ⋅ π ⋅ ε 4 ⋅ π ⋅ ε ⋅ ra ⋅ ri = = U 1 1 ra − ri − ri ra Beispiel 3: (3.24) Kapazität eines Kugelkondensators mit dem Radius R im freien Raum. Der Kondensator trage die Ladung Q. Aus Symmetriegründen genügt die Berechnung der radialen Feldkomponenten (die tangentialen Komponenten sind Null): Dr = Q 4π ⋅ r (3.25) Er = Dr ε (3.26) Die Spannung zwischen der Oberfläche und einem unendlich entfernten Punkt beträgt: ∞ (3.27) Q Q ⋅ dr = 2 4π ⋅ ε ⋅ R R 4πε ⋅ r U=∫ Damit folgt für die Kapazität einer metallischen Kugel im freien Raum: C= Q = 4π ⋅ ε ⋅ R U (3.28) Das selbe Ergebnis erhält man auch aus Gleichung (3.24), wenn man den Grenzübergang für ra → ∞ ausführt und den Innenradius ri = R setzt. Beispiel 4: Kapazität eines Koaxialkabels In elektrischen Schaltungen oder bei Messungen müssen in manchen Fällen die Leitungskapazitäten der Leitungen berücksichtigt werden. Ein häufig verwendeter Kabeltyp ist das Koaxialkabel. Eine schematische Darstellung ist in Bild 3.8 angegeben. Der feldbehaftete Raum befindet sich zwischen dem Innenleiter und dem Außenleiter. Innenleiter E, D, ε Bild 3.8 Außenleiter Prinzipieller Aufbau eines Koaxialkabels. Der Feldraum befindet sich zwischen Innen- und Außenleiter Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-8 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Für ein Leitungsstück der Länge L lässt sich für eine gedachte Hüllfläche mit dem Radius r um den Innenleiter mit ri ≦ r ≦ ra der Betrag der dielektrischen Verschiebung D des radialsymmetrischen Feldes wie folgt bestimmen: Q = ∫ D ⋅ dA = D ⋅ A = D ⋅ 2 ⋅ π ⋅ r ⋅ L (3.29) A Für die Spannung zwischen der inneren und der äußeren Zylindermantelfläche erhält man: a r Q Q Q 1 r U = ∫ E ⋅ dr = ⋅ ∫ ⋅ dr = ⋅ [ln(r )]rai = ⋅ ln a 2 ⋅ π ⋅ ε ⋅ L ri r 2⋅π⋅ε⋅L 2 ⋅ π ⋅ ε ⋅ L ri ri ra r (3.30) Aus der Definitionsgleichung für die Kapazität erhält man aus den vorhergehenden Beziehungen für die Kapazität C der Koaxialleitung mit der Länge L: C= Q 2⋅π⋅ε⋅L = U r ln a ri (3.31) Aus den vorausgegangenen Beispielen wird die prinzipielle allgemeine Berechnungsweise einer Kapazität deutlich. Die Schritte lassen sich wie folgt zusammenfassen: Q = ∫ D ⋅ dA 1. mit D = f (Ort ) (3.32) A 2. D E= ε (3.33) 3. U = ∫ E ⋅ d l = f (Q ) (3.34) l 4. C= 3.1.3 Q U (3.35) Ströme und Spannungen am Kondensator Für die Pfeilung der Spannung und des Stromes am Kondensator wird folgende Zuordnung angenommen: uC C iC Bild 3.9 Pfeilung des Stromes und der Spannung am Kondensator Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-9 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Eine Änderung des Ladezustands eines Kondensators geht mit einer Spannungsänderung einher. q (t ) = C ⋅ u (t ) (3.36) Bei einer zeitlichen Veränderung des Ladezustands fließt ein Strom im Kondensator: i (t ) = dq (t ) du (t ) = C⋅ dt dt (3.37) Die vorausgehende Gleichung ist das Grundgesetz für den Kondensator (Kondensatorgleichung). An den Elektroden des Kondensators sammeln sich Ladungen. Im Dielektrikum selbst fließt kein Strom. Die Spannung am Kondensator kann sich nicht sprungförmig ändern, da dazu ein unendlicher Strom notwendig wäre. 3.1.4 Laden und Entladen eines Kondensators Um einen Kondensator auf eine Spannung U aufzuladen, muss er über einen in Reihe geschalteten Widerstand an die Quelle angeschlossen werden. Im folgenden Beispiel ist der Kondensator C für Zeiten t < 0 ungeladen. Zur Zeit t = 0 wird der Schalter S geschlossen. S t=0 U R uR C uC iC Bild 3.10 Ersatzschaltbild für den Ladevorgang eines Kondensators Die Maschenregel liefert: U = u R (t) + u C (t) (3.38) Für den Widerstand R gilt das ohmsche Gesetz: u R (t) = R ⋅ i C (t) (3.39) Der Kondensator folgt der Kondensatorgleichung: i C (t) = C ⋅ du C ( t ) dt (3.40) Einsetzen von (3.40) in (3.39) und in (3.38) liefert die Differentialgleichung: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-10 Einführung in die Elektrotechnik Teil I U = R ⋅C⋅ Kapitel 3: Elektrische und magnetische Felder du C ( t ) + u c (t) dt (3.41) Neben der Differentialgleichung ist zur Lösung eine Randbedingung, d. h. ein fester Wert für einen vorgegebenen Zeitpunkt, erforderlich: s. o. uC (0) = 0 Differentialgleichungen sind i. A. nicht geschlossen lösbar (s. Vorlesung Mathematik). In vielen einfachen Fällen aus Natur- und Ingenieurwissenschaften existieren geschlossene Lösungen. Hier führt der Ansatz über eine Exponentialfunktion zum Erfolg: u C (t ) = α 1 ⋅ e − t τ (3.42) + α0 du C (t ) α1 − τ = ⋅e dt −τ t (3.43) Einsetzen ergibt: t t − − α U = R ⋅ C ⋅ 1 ⋅ e τ + α1 ⋅ e τ + α 0 −τ (3.44) Die zeitabhängigen Terme müssen in Summe Null ergeben, da U = const. Ist. t 0 = R ⋅C⋅ t − α1 − τ ⋅ e + α1 ⋅ e τ ⇒ τ = R ⋅ C −τ (3.45) Der zeitunabhängige Term muss dann U ergeben: U = α0 (3.46) Mit der Randbedingung folgt: u C (0 ) = 0 = U + α1 ⋅ e − 0 τ ⇒ α1 = − U t − u C (t ) = U ⋅ 1 − e RC t i C (t ) = U − RC ⋅e R (3.47) (3.48) (3.49) Das Produkt RC ist charakteristisch für den zeitlichen Ablauf der Aufladung. Es hat die Dimension einer Zeit und wird als Zeitkonstante des Stromkreises τ bezeichnet. τ = R ⋅C (3.50) Der zeitliche Verlauf von Strom und Spannung beim Laden eines Kondensators sieht wie folgt aus: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-11 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Werte für den berechneten Verlauf: U = 10 V R = 10 kΩ C = 200 µF ⇒τ=2s Bild 3.11 Zeitlicher Verlauf des Stromes und der Spannung am Kondensator während des Ladevorganges Eine genauere Betrachtung des Verhaltens zu bestimmten Zeitpunkten liefert die folgenden Erkenntnisse: Zeit Kondensator wirkt wie uC t=0 „Kurzschluss“ u C (0) = 0 t = τ t→∞ „Leerlaufverhalten“ iC i C (0 ) = U R 1 u C (τ) = 1 − ⋅ U e i C (τ ) = U 1 ⋅ R e u C (∞ ) = U i C (∞ ) = 0 Tabelle 3.2 Verhalten des Kondensators zu bestimmten ausgezeichneten Zeitpunkten Beim Entladen wird die Reihenschaltung aus Widerstand und Kondensator über einen Schalter kurzgeschlossen. Zur Zeit t < 0 ist der Kondensator auf die Spannung U aufgeladen. Zur Zeit t = 0 wird der Schalter S geschlossen. S t=0 R uR C uC iC Bild 3.12 Ersatzschaltbild für den Entladevorgang eines Kondensators Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-12 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Wie beim Laden wird die Differentialgleichung des Systems aufgestellt: 0 = R ⋅C⋅ du C ( t ) + u c (t) dt (3.51) Mit der Randbedingung: uC(0) = U folgt: u C (t) = U ⋅ e − t RC =U⋅e − t τ (3.52) t i C (t) = − t (3.53) U − RC U − ⋅e =− ⋅e τ R R Der zeitliche Verlauf von Strom und Spannung beim Entladen eines Kondensators sieht wie folgt aus: Werte für den berechneten Verlauf: U = 10 V R = 10 kΩ C = 200 µF ⇒τ=2s Bild 3.13 Zeitlicher Verlauf des Stromes und der Spannung am Kondensator während des Entladevorgangs (beachte: negative Werte der Stromachse!) Hinweis: u Ci (t ) = α k ⋅ e Bei Schaltungen mit k Kondensatoren muss pro Kondensator Ci eine Exponentialfunktion angesetzt werden: − t τk − + α k −1 ⋅ e t τ k −1 + .. + α 0 (3.54) Mit Hilfe von Laplace- oder Fourier-Transformation kann das lineare Differentialgleichungssystem dann in ein lineares Gleichungssystem überführt werden, Lösung dann wie lineare Gleichungssystem wie in Kapitel 1. 3.1.5 Schaltungen von Kondensatoren Parallelschaltung: alle Kondensatoren haben dieselbe Spannung. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-13 Einführung in die Elektrotechnik Teil I C1 U C2 Kapitel 3: Elektrische und magnetische Felder Cν U Ce Bild 3.14 Parallelschaltung aus ν Kondensatoren (links) und entsprechende Ersatzschaltung mit der Ersatzkapazität Ce (rechts) Q = ∑ Ck ⋅ U (3.55) k Die Ersatzkapazität Ce berechnet sich als Summe der Einzelkapazitäten. Ce = Q = ∑ Ck U k (3.56) Reihenschaltung: alle Kondensatoren haben dieselbe Ladung: C1 C2 U U Ce Cν Bild 3.15 Reihenschaltung aus ν Kondensatoren (links) und entsprechende Ersatzschaltung mit der Ersatzkapazität Ce (rechts) Q Ck (3.57) 1 U 1 = =∑ Ce Q k Ck (3.58) U=∑ k 3.1.6 Energie des elektrischen Feldes im Kondensator Zur Zeit t = 0 sei der Kondensator leer. Er wird geladen; i und u sind die Momentanwerte des Stromes und der Spannung zur Zeit t. Dabei wird dem Kondensator die Energie W zugeführt: W = ∫ u C ( t ) ⋅ i C ( t ) ⋅ dt (3.59) Nun gilt aber wie oben: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-14 Einführung in die Elektrotechnik Teil I i C (t) = C ⋅ Kapitel 3: Elektrische und magnetische Felder du C ( t ) dt (3.60) Einsetzen des Stroms in (3.59) ergibt: U W = ∫ C ⋅ u C ( t ) ⋅ du = 0 1 ⋅ C ⋅ U2 2 (3.61) Diese Energie kann bei Entladung vollständig entnommen werden. 3.1.7 Energiedichte des elektrischen Feldes Die Energiedichte ist die auf das Volumen bezogene Energie. Am Beispiel des Plattenkondensators kann sie einfach berechnet werden. Dessen Kapazität beträgt (s.o.): C = ε0 ⋅ ε r A l (3.62) Die Energiedichte ergibt sich dann zu: W C ⋅ U2 A U2 1 U U 1 1 = = ε0 ⋅ εr ⋅ ⋅ = ⋅ ε0 ⋅ εr ⋅ ⋅ = ⋅ D ⋅ E = ⋅ ε0 ⋅ εr ⋅ E 2 V 2⋅V l 2⋅A⋅l 2 l l 2 2 (3.63) Es ist nachweisbar, dass diese Gleichung auch für inhomogene Felder verallgemeinert werden darf. Die Gesamtenergie folgt dann durch Integration der Energiedichte über das Volumen: W = 3.2 3.2.1 1 2 ∫ ε ⋅ E2 ⋅ d V (3.64) V Das magnetische Feld Allgemeines Neben den Kräften auf ruhende elektrische Ladungen wird eine zweite Art von Kräften auf bewegte Ladungen beobachtet. Das verursachende Feld wird als magnetisches Feld bezeichnet. Magnetische Felder entstehen entweder durch Ströme oder durch Permanentmagnete. Die Wirkung von Permanentmagneten wird heute so erklärt, dass jedes um einen Atomkern rotierende Elektron einen elektrischen Strom darstellt. In den meisten Materialien kompensieren sich die Wirkungen der Elektronen nach außen. Bei Permanentmagneten jedoch entsteht ein äußeres Feld, indem eine Überzahl von Elektronen in einer Ebene in der gleichen Richtung rotiert. Die Anziehungskraft von Permanentmagneten auf Eisen gab dem Magnetismus seinen Namen, da das Phänomen erstmals in der Antike in der magnetitreichen Region Magnesia (Griechenland) beobachtet wurde. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-15 Einführung in die Elektrotechnik Teil I 3.2.2 Kapitel 3: Elektrische und magnetische Felder Größen im magnetischen Feld 3.2.2.1. Magnetische Feldstärke und magnetische Spannung Wenn ein Stabmagnet (z. B. eine Kompassnadel) in die Nähe eines langen stromdurchflossenen Leiters gebracht wird, kann Folgendes beobachtet werden: Eine Kraft stellt den Magneten immer so, dass seine Magnetisierung tangential zu einem gedachten Kreis um den Leiter weist. Die Kraft auf den Magneten ist proportional dem Strom I und umgekehrt proportional dem Abstand des Magneten von der Mittellinie des Leiters. Magnet I N S Bild 16 Magnetfeld eines stromdurchflossenen Leiters und Ausrichtung eines Stabmagneten im feldbehafteten Raum H Für die Darstellung wird folgende Symbolik verwendet: Kreuz: Strom fließt in die Zeichenebene Punkt: Strom fließt aus der Zeichenebene Aufgrund dieser Beobachtungen wird magnetische Feldstärke H definiert als Quotient aus dem verursachenden Strom und der Länge der Feldlinie: H= I 2⋅π⋅r H= Formelzeichen: H Einheit: [H] = 1 Am-1 y I I ⋅ e ϕ= ⋅ 2 2 2⋅π⋅r 2 ⋅ π ⋅ (x + y ) − x (3.65) Die magnetische Feldstärke H ist eine vektorielle Größe. Bei einem langen geraden Leiter verlaufen die Feldlinien kreisförmig um den Leiter. Das magnetische Feld weist geschlossene Feldlinien auf. Anschaulich bilden die Feldlinien Wirbel um Gebiete mit elektrischem Stromfluss. Das Magnetfeld wird daher auch als Wirbelfeld bezeichnet und weist im Gegensatz zum elektrischen Feld keine Quellen auf. Die Richtung der Feldlinien: wird durch die „Korkenzieherregel“ festgelegt: Eine in Richtung des Stromes eingedrehte Rechtsschraube gibt durch ihren Drehsinn die Richtung des Magnetfeldes an. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-16 Einführung in die Elektrotechnik Teil I 3.2.2.2. Kapitel 3: Elektrische und magnetische Felder Magnetische Induktion (magnetische Flussdichte) Die Einführung einer weiteren magnetischen Feldgröße ist erforderlich, weil Materialien einen Einfluss auf das Verhalten des magnetischen Feldes haben. Z.B. verstärkt Eisen die Kraftwirkung im magnetischen Feld. Die zweite magnetische Feldgröße wird magnetische Induktion (oder magnetische Flussdichte) B genannt. Sie ist, wie auch die magnetische Feldstärke, ein Vektor und steht parallel zur magnetische Feldstärke. Formelzeichen: B Einheit: [B] = 1 Vsm-2 = 1 T (Tesla) Manchmal wird noch die alte Einheit G (Gauß) angegeben: 1 T = 104 G Wie auch beim elektrischen Feld sind die beiden magnetischen Feldgrößen über eine Materialgleichung miteinander verknüpft. B = µ⋅H (3.66) Die Materialkonstante µ wird Permeabilität (oder Induktionskonstante) genannt. Auch hier erfolgt praktischerweise eine Aufteilung in die absolute Permeabilität im Vakuum µ0 und in eine materialabhängige relative Permeabilität µr. µ = µ0 ⋅ µr (3.67) Die absolute Permeabilität beträgt: µ 0 = 4π ⋅ 10 − 7 Vs Vs = 1,256 ⋅ 10 − 6 A⋅m A⋅m (3.68) In Luft und den meisten anderen Materialien ist µr ≈ 1. In ferromagnetischen Materialien kann µr erheblich größere Werte (100..100.000) annehmen. Die Größe von µr hängt stark von der magnetischen Induktion ab. Ferromagnetische Materialien sind z. B. die Elemente Eisen, Nickel und Kobalt. 3.2.3 Makroskopische Beschreibung magnetischer Felder Das bisher beschriebene Feld eines Linienleiters ist stark inhomogen und daher technisch schwierig zu nutzen. Daher soll nun eine Anordnung vorgestellt werden, die ein (in Teilbereichen) homogenes magnetisches Feld erzeugen kann. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-17 Einführung in die Elektrotechnik Teil I 3.2.3.1. Kapitel 3: Elektrische und magnetische Felder Feld einer Spule Bild 3.17 Vom Strom durchflossene Spule (Drahtwindungen) und magnetisches Feldbild l Feststellung aus Experiment: Im Innern der Spule ist Feld größer als durch I zu vermuten. Feld ist im Innern der Spule nahezu konstant. Erklärung durch Überlagerung der einzelnen Windungen: H ~ w I Dazu wird ein Draht wie eine Schraubenfeder aufgewickelt. Wenn die Länge l der Spule deutlich größer ist als der Durchmesser, bildet sich im Innern des Zylinders ein homogenes l Da es sich beim magnetischen Feld nach wie vor um ein Wirbelfeld magnetisches Feld aus. handelt, schließen sich die Feldlinien außerhalb der Spule in einem inhomogenen Feldanteil. Die magnetische Feldstärke H im Innern des Zylinders beträgt: H= w⋅I l (3.69) mit w: Windungszahl der Spule 3.2.3.2. Durchflutung (magnetische Spannung) Die magnetische Feldstärke steht senkrecht auf der Ebene, die die Stromrichtung angibt. Ursache des magnetischen Feldes ist die Summenwirkung des Stroms in allen Windungen. Sie wird auch als magnetische Durchflutung Θ bezeichnet: Θ = w⋅I (3.70) In der älteren Literatur wird für die Durchflutung oft die Bezeichnung Ampèrewindungen benutzt. Die Durchflutung hat im magnetischen Feld dieselbe Bedeutung wie die Spannung im elektrischen Feld. Die magnetische Feldstärke steht immer senkrecht auf den sie verursachenden Strom (exakt formuliert: auf dem Stromdichtevektor). Die die Feldstärke erzeugende Durchflutung entlang eines Weges beträgt: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-18 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder 2 Θ 21 = ∫ H ⋅ d s (3.71) 1 Im Falle eines geschlossenen Weges ist die magnetische Spannung gleich der Summe der eingeschlossenen Ströme. Durch geschickte Wahl des Integrationswegs wird nun nachgewiesen, dass das Außenfeld einer langen Spule keinen Beitrag zur Gesamtdurchflutung liefert: Bild 3.18 Querschnitt durch eine Spule und verschiedene magnetische Umlaufwege Auf dem geschlossenen Umlaufweg 1-2-3-4-1 gilt: 2 3 4 1 H ∫ ⋅ ds = ∫ H ⋅ ds + ∫ H ⋅ ds + ∫ H ⋅ ds + ∫ H ⋅ ds = w ⋅ I 1 2 3 (3.72) 4 Für die einzelnen Terme gilt: Für die einzelnen Terme gilt: 2 ∫ H ⋅ ds = H ⋅ l 1 3 H ⋅ d s = 0 , da H ⊥s ∫ 2 (3.73) 4 H ⋅ d s = 0 , da H (∞ ) = 0 ∫ 3 1 H ⋅ d s = 0 , da H ⊥s ∫ 4 Somit bleibt: H⋅l = w ⋅I (3.74) H⋅l = w ⋅I Im allgemeinen Fall können mehrere unabhängige Ströme ein gemeinsames Magnetfeld verursachen: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-19 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Bild 3.19 Durch mehrere Ströme verursachtes Magnetfeld H ∫ ⋅ ds = ∑ I (3.75) Die Stromsumme kann durch das Integral der Stromdichte über der vom Integrationsweg eingeschlossenen Fläche ausgedrückt werden: Θ = ∫ H ⋅ d s = ∫ S ⋅ dA (3.76) A Gleichung (3.76) wird als Durchflutungsgesetz bzw. als 1. Maxwellsche Gleichung in Integralform bezeichnet 3.2.3.3. Magnetischer Fluss Der magnetische Fluss Φ beschreibt die Summe der magnetischen Induktionslinien, die senkrecht durch eine Fläche treten. In einem homogenen B-Feld (erzeugt z. B. einer langen) Spule gilt für eine ebene Fläche A (Hinweis: Flächenvektor steht senkrecht auf einer Fläche!): Φ = B ⋅ A ⋅ cos ∠B, A = B ⋅ A ( ) (3.77) Bild 3.20 Magnetischer Fluss durch die gerichtete Fläche A Formelzeichen: Φ Einheit: [Φ] = 1 Vs = 1 Wb (Weber) Manchmal wird noch die alte Einheit M (Maxwell) angegeben 1Vs ^= 108 M Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-20 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Im Innenraum der Spule ergibt sich für den gesamten Fluss (Fläche steht senkrecht auf den Induktionslinien): Φ = B⋅ A = B⋅ π ⋅ r2 (3.78) Im allgemeinen Fall nicht homogener Felder gilt folgende Definition des Flusses: Φ = ∫ B ⋅ dA (3.79) A 3.2.3.4. Magnetfeld eines geraden stromdurchflossenen Leiters Am Anfang der Behandlung magnetischer Felder wurde bereits qualitativ auf das Außenfeld ein es geraden stromdurchflossenen Leiters eingegangen. Nun soll das Feld im Innen- und Außenraum des Leiters berechnet werden. ϕ S=Sz=const. r H=Hϕ(r) Bild 3.21 In z-Richtung vom Strom I durchflossener Leiter z Im Innenraum des Leiters (r < R) gilt mit der Stromdichte S = Sz = I I = A π ⋅ R 12 (3.80) H hat nur eine Komponente in Richtung der Winkelkoordinate ϕ: H = Hϕ. Der Weg entlang der Winkelkoordinate beträgt: ∂s ϕ ∂ϕ = r ⇒ ds ϕ = rdϕ 2π H ∫ ds = ∫ H ϕ ⋅ r ⋅ dϕ = H ϕ ⋅ 2π ⋅ r (3.81) (3.82) 0 ∂A ∂πr 2 = = 2πr ⇒ dA = 2πrdr ∂r ∂r (3.83) r I ⋅ r2 S d A = S ⋅ 2 π rdr = ∫ ∫0 R2 A = πr 2 (3.84) Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-21 Einführung in die Elektrotechnik Teil I Hϕ = Kapitel 3: Elektrische und magnetische Felder I⋅r ⋅ eϕ 2π ⋅ R 2 (3.85) Im Außenraum wird der gesamte Leiterstrom umschlossen: H ∫ ⋅ d s = H ⋅ 2π ⋅ r (3.86) S ∫ ⋅ dA = I (3.87) A H= I 2π ⋅ r (3.88) Im nachfolgenden Bild sind die Feldverläufe im Innenraum des Leiters und im Außenraum um den Leiter dargestellt. Bild 3.22 Feldverlauf im Innern und im Außenraum eines stromdurchflossenen Leiters Beispiel: Koaxialkabel mit R1, R2 und R3. Innenbereich wie Einzelleiter. Von R2 bis R3 gilt: S= −I π ⋅ R 32 − R 22 ( (3.89) ) dA = 2π ⋅ r dr r 2 1 = I ⋅ 1 − r S ⋅ dA = I ⋅ 1 − 2 π r ⋅ dr ∫ R2 π ⋅ (R 32 − R 22 ) R∫ 3 A 2 (3.90) Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung (3.91) 3-22 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder 1 r H = I ⋅ − 2 r R3 r R2 1 1 I H= ⋅ r 2π 1 r − 2 r R 3 0 3.2.4 (3.92) für r < R1 für R1 ≤ r < R 2 für R 2 ≤ r < R 3 für R3 ≤ r (3.93) Magnetische Werkstoffe Grundsätzliche Unterscheidung: diamagnetisch: µr < 1 paramagnetisch: µr > 1 ferromagnetisch: µr >> 1 3.2.4.1. Verhalten Der relative Permeabilität nimmt in einigen Stoffen Werte µr>>1 (bis 100.000) an. Technisch bedeutend sind vor allem die Elemente Eisen, Nickel, Kobalt und deren Legierungen. Diese Stoffe werden als ferromagnetisch bezeichnet. Die relative Permeabilität dieser Stoffe hängt von der magnetischen Induktion ab. Oberhalb von etwa 2 T verhalten sich die meisten Ferromagnetika wie Luft. Die relative Permeabilität hängt ebenfalls von der Temperatur ab. So ist z.B. Gadolinium nur unterhalb von 19 °C ferromagnetisch (Nutzung in Temperatursensoren). Die relative Permeabilität von ferromagnetischen Stoffen ist nichtlinear und hängt von der Vorgeschichte ab. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-23 Einführung in die Elektrotechnik Teil I B in T Kapitel 3: Elektrische und magnetische Felder Sättigung Transformatorblech 1,5 Gusseisen B = µ0 H 100 H in A/m Bild 3.23 Magnetisierungskennlinien von Trafoblech und von Gusseisen Diese Abhängigkeit wird in der Praxis in "Magnetisierungskurven" angegeben. 3.2.4.2. Hysterese, Remanenz, Koerzitivkraft Das nachfolgende Bild zeigt eine Anordnung zur Messung der Eigenschaften ferromagnetischer Werkstoffe. Eine Spule mit mehreren Windungen wird um einen ferromagnetischen Kern geschlungen. Aufgrund der hohen Permeabilität des ferromagnetischen Werkstoffs wird das Magnetfeld praktisch vollständig in diesem Werkstoff verlaufen. B = µ0 H Bild 3.24 Anordnung (magnetischer Kreis) zur Bestimmung des Zusammenhangs zwischen magnetischer Induktion B und magnetischer Feldstärke H, B = f(H) Bei erstmaliger Beaufschlagung eines ferromagnetischen Stoffes mit einem Feld steigt B in Abhängigkeit von H entsprechend der Kurve a, der sog. Neukurve. Wenn nun die Feldstärke zurückgenommen wird (z.B. durch Ausschalten des Stroms), bleibt eine Restinduktion zurück, die sogenannte Remanenzinduktion. Um die Induktion wieder auf Null zu bringen, ist ein Gegenfeld notwendig, dessen Stärke als Koerzitivfeldstärke bezeichnet wird. Durch mehrfaches Durchlaufen des Zyklus in beide Richtungen entsteht die Hystereseschleife. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-24 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Bild 3.25 Hysteresekurve Ursache für dieses Verhalten ist eine Reibung beim Umklappen der Elementarmagnete. Beim Durchlaufen der Hystereseschleife wird eine spezifische Energie verbraucht, die der eingeschlossenen Fläche entspricht. Das Verhalten ferromagnetischer Werkstoffe kann vereinfacht wie folgt erklärt werden: B=0 unmagnetisiert B < Br teilweise magnetisiert (Feldverstärkung) B > Br voll magnetisiert (Sättigung) Bild 3.26 Erklärung des magnetischen Verhaltens von Ferromagnetika Das vom Magnetisierungsstrom erzeugte H-Feld richtet die "Elementarmagnete" (atomare Ringströme) immer stärker parallel zu H aus. Dadurch wächst die Induktion B (Umklappen von Elementarmagneten). Wenn alle Elementarmagnete ausgerichtet sind, kann keine Steigerung mehr erfolgen. Es tritt eine Sättigung ein. Typische Werte für die Sättigungsinduktion betragen 1,5..2 T in technisch relevanten Werkstoffen. Der höchste gemessene Wert beträgt 3,67 T (Dysprosium bei Temperaturen unter 20 K). Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-25 Einführung in die Elektrotechnik Teil I 3.2.4.3. Kapitel 3: Elektrische und magnetische Felder Hartmagnetische Werkstoffe Werkstoffe mit hoher Koerzitivfeldstärke werden als magnetisch hart bezeichnet. Sie haben im Idealfall eine rechteckige Hystereseschleife. Derartige Werkstoffe werden als Permanentmagnete in Haftmagneten, Elektromotoren, Elektroakustik und magnetischen Speichern eingesetzt. Maximal erreichbare Sättigungsinduktionen Br liegen bei 1,5 T. Die Koerzitivfeldstärken erreichen bis 1.500.000 Am-1. Bild 3.27 Hysteresekurve eines magnetisch harten Werkstoffs Stähle (V2A) Oxide (Magnetit: Fe3O4, Chromdioxid CrO2: geringe Remanenz für Speicherung) Sinterwerkstoffe Ferrite (kostengünstiges Material für Kleinmotoren) Seltenerdmagnete (SmCo, NdFeB: hohe Remanenz für Motoren, Lautsprecher) 3.2.4.4. Weichmagnetische Werkstoffe Werkstoffe mit einer kleinen Fläche der Hystereseschleife werden als magnetisch weich bezeichnet. Ihre Kennlinie ist im Idealfall eine Gerade. Sie werden zur Führung des magnetischen Flusses in elektrischen Maschinen, Transformatoren, Aktoren und Magnetköpfen eingesetzt. Bild 3.28 Hysteresekurve eines magnetisch weichen Werkstoffs Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-26 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Reineisen Siliziumeisen (Fe + 0,4 ÷ 3% Si: geringe Verluste bei Netzfrequenz und hohe Sättigung) Kobalt-Eisen (bis 2,43 T Sättigungsinduktion bei Raumtemperatur) Nickel-Eisen (µr bis einige 100.000: Mumetall) Amorphe Werkstoffe (geringe Verluste bei hohen Frequenzen) 3.2.4.5. Unmagnetische Werkstoffe In vielen Anwendungen ist es erwünscht, unmagnetische Werkstoffe in der Konstruktion zu verwenden. Dafür eignet sich als besonders festes Material neben Ne-Metallen auch AustenitStahl (µr ≈ 1 .. 2). 3.2.5 Der magnetische Kreis Als magnetische Kreise bezeichnet man Anordnungen zur kontrollierten Führung magnetischer Feldlinien. Entsprechend den bisherigen Ausführungen bilden diese sich in einem geschlossenen Kreis aus. Zur Führung werden hauptsächlich ferromagnetische Materialien (im allgemeinen Sprachgebrauch „Eisen“) verwendet, die anwendungsbedingt von Luftspalten unterbrochen sein können. Die Linien der magnetischen Induktion verlaufen überwiegend im Eisen. Das Bild zeigt einen einfachen magnetischen Kreis mit einer um den U-förmigen Eisenkern gewickelten Spule, zwei Luftspalten und einem beweglichen Anker. Zur Berechnung wird die vereinfachende Voraussetzung getroffen: Die Induktionen im Eisen und im Luftspalt sind praktisch homogen. Spule Joch Idealisierte magnetische Induktionslinien (homogenes Feld) Pole Luftspalt Anker Bild 3.29 Einfacher magnetischer Kreis mit zwei Luftspalten Aus dem Durchflutungsgesetz folgt: Θ = H Fe ⋅ l Fe + H δ ⋅ l δ = w ⋅ I (3.94) Der magnetische Fluss ist in allen Abschnitten gleich: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-27 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Φ = B Fe ⋅ A Fe = B δ ⋅ A δ (3.95) 1 l Fe 1 lδ Θ = ⋅ + ⋅ µ Fe A Fe µ δ A δ ⋅ Φ (3.96) Die inneren Terme sind formal aufgebaut wie die Bestimmungsgleichung für den elektrischen Widerstand. Daher wird ein magnetischer Widerstand definiert: Rm = l µ⋅A (3.97) Magnetische Kreise können wie elektrische Kreise verzweigt sein. Hier sind das Ohmsche und die Kirchhoff’schen Gesetze anwendbar. Beispiel 1: Dreischenkeldrossel (Anwendung in Drehstromschaltungen) Φ1 S1 J1 Φ3 Θ1 S2 J2 Θ2 Φ1 Φ2 S3 RJ1 Θ3 RS1 RJ2 RS3 RS2 Φ2 Θ1 J3 Φ3 Θ2 Θ3 J4 RJ3 RJ4 Bild 3.30 Dreischenkeldrossel Bei weitem Luftspalt und für Abschätzungen kann der Beitrag der Eisenwege vernachlässigt werden. Aufgrund des nichtlinearen Verhaltens der Eisenwege erfolgt die praktische Berechnung von magnetischen Kreisen graphisch oder numerisch (siehe Übungen). In unverzweigten magnetischen Kreisen wird unter der Annahme eines homogenen und konstanten magnetischen Flusses abschnittsweise der magnetische Widerstand berechnet und entsprechend dem Durchflutungsgesetz durch Summieren die notwendige Durchflutung berechnet. Aus lk Θ = ∑ k µk ⋅ Ak ⋅ Φ (3.98) folgt durch Einsetzen der Materialkennlinie Φ µ = f (B) = f A (3.99) die Kennlinie des magnetischen Kreises Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-28 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Θ = f (Φ ) (3.100) Beispiel 2: Scherung (graphisches Verfahren zur Ermittlung der Kennlinie von nichtlinearen magnetischen Kreisen) Grundgedanke: Sättigungskennlinie des Eisens liegt vor (einfacher Kreis mit Weicheisen und Luftspalt). H δ ⋅ l δ + H Fe ⋅ l Fe = Θ H Fe = l Θ − Hδ ⋅ δ l Fe l Fe (3.101) (3.102) Der Schnittpunkt dieser Geradengleichung mit der Kennlinie ergibt den Arbeitspunkt: Bild 3.31 Konstruktion des Arbeitspunktes Folgen: Linearisierung der Kennlinie des Kreises; erhöhter Magnetisierungsbedarf Praktische Berechnung: Iterative Ermittlung der Arbeitskennlinie mit programmierbarem Rechner oder FE-Feldberechnung. 3.2.6 Energie des magnetischen Feldes Beim Aufbau eines magnetischen Feldes wird die Energie Wm in dieses Feld gespeichert: H Wm = V ⋅ ∫ BdH (3.103) 0 Nur bei konstantem µ (z.B. in Luft) kann der Ausdruck vereinfacht werden: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-29 Einführung in die Elektrotechnik Teil I H H 0 0 Wm = V ⋅ ∫ BdH = V ∫ µ ⋅ HdH =V ⋅ Kapitel 3: Elektrische und magnetische Felder µ ⋅ H2 B⋅H B2 = V⋅ = V⋅ 2 2 2⋅µ (3.104) In Analogie zum elektrischen Feld kann auch eine Energiedichte definiert werden: W B⋅H = V 2 (3.105) Beispiel: Luftspalt in einem Eisenkreis: B = 1 T, µ0 = 1,256 µH/m: W/V ≈ 400 kJ m-3 ist größer als elektrische Energiedichte. 3.2.7 Berechnung von Kräften im Magnetfeld Wie bereits bei der Einführung dargestellt, verursachen magnetische Felder eine Kraftwirkung. Nun sollen solche Kräfte berechnet werden. 3.2.7.1. Berechnung von Kräften aus der Energie Im Folgenden wird ein generell gültiges Verfahren anhand eines Elektromagneten mit Joch, Luftspalt und Anker beschrieben. Das Verfahren nutzt die magnetische Energie. Die Kraft in eine vorgegebene Richtung entspricht der Energieänderung pro Wegeinheit, bzw. die Kraft ist die Ableitung der gespeicherten Energie nach dem Weg. Die Methode wird virtuelle Verschiebung genannt. δ Bild 3.32 Ausschnitt aus einem magnetischen Kreis mit Luftspalt Als Beispiel wird ein Eisenkreis mit Luftspalt gewählt. Das Eisen sei magnetisch ideal leitend. Damit wird HFe = 0. Also ist die gesamte magnetische Energie im Luftspalt gespeichert. Sie beträgt: Wm = µ0 ⋅ H2 ⋅ δ ⋅ A 2 mit δ: Luftspaltlänge und (3.106) A: Luftspaltfläche Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-30 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Nun kann H bestimmt werden: H= w ⋅I δ (3.107) Damit folgt für die Energie: 2 (3.108) µ w ⋅I µ0 2 Wm = 0 ⋅ ⋅ (w ⋅ I ) ⋅ A ⋅δ⋅A = 2 δ 2⋅δ Wenn nun der Anker um das kleine Stück ∂δ verschoben wird, ergibt sich für die Kraft: 2 µ A ∂Wm A µ0 ⋅ w ⋅ I A 2 Fm = = − 0 ⋅ 2 ⋅ (w ⋅ I ) = − ⋅ ⋅ B2 =− 2 δ 2µ 0 2µ 0 ∂δ δ (3.109) Wenn man Zahlenwerte in den letzten Term einsetzt, erhält man einen Ausdruck für die maximale „Zugspannung“, die man mit Elektromagneten erreichen kann (mit B = 2 T): F 10 7 N N = ≈3 2 A π m mm 2 Technische Anwendungen für Joch-Anker-Anziehung findet man z. B. bei Elektromagneten (Hubmagnete), elektromagnetischen Relais, magnetischen Kupplungen und Aufspannplatten (die Mehrzahl der Elektromotoren funktioniert nach einem anderen Prinzip!). Derartige Kräfte treten auch im Inneren vom Eisen auf. Darauf sind Magnetostriktion (Längenänderungen unter Feldeinfluss) und Geräusche von Transformatorkernen zurückzuführen. 3.2.7.2. Kraft auf stromführende Leiter im Magnetfeld Einige Magnetfelder bilden sich ohne Eisen frei im Raum aus. Auch hier tritt eine Kraftwirkung auf. Als Beispiel wird ein stromführender Leiter der Länge l gewählt, der sich in einem homogenen Magnetfeld befindet. Die Richtung des Leiters ist senkrecht zum homogenen Feld. Auch der Leiter erzeugt ein Magnetfeld, das sich dem homogenen Feld überlagert (s. Bild). Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-31 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Bild 3.33 Stromdurchflossener Leiter im Magnetfeld und Überlagerung der beiden Felder Auf der linken Seite wird das Eigenfeld des Leiters geschwächt, auf der rechten Seite hingegen verstärkt. Damit entsteht links eine niedrigere Energiedichte als rechts. Der Leiter erfährt eine Kraft in Richtung auf die niedrigere Energiedichte. Experimentell wird festgestellt, dass die Kraft dem Strom I, der Länge des Leiters l und der Induktion im homogenen Feld B proportional ist. Es ist also: F = I⋅l⋅B (3.110) Die Wirkung der Kraft folgt dabei der „rechte-Hand-Regel“: Der Daumen gibt die Kraftrichtung an, der Zeigefinger die Stromrichtung und der Mittelfinger die Feldrichtung. Wenn nun der Leiter gedreht wird und nicht mehr senkrecht zum Feld steht, wird festgestellt, dass die Kraft auch vom Winkel zwischen Leiterrichtung und Feldrichtung abhängt. Sie ist maximal bei 90° und wird bei 0° zu Null. Daher lautet die Gleichung in vektorieller Schreibweise: F = I⋅ l ×B ( ) (3.111) Oder F = I ⋅ l ⋅ B ⋅ sin (∠(l, B)) (3.112) Die Kraft zeigt senkrecht zur durch l und B aufgespannten Ebene. Der Strom selbst ist eine skalare Größe. Die Richtung des Vektors wird ausschließlich durch die Länge des Leiters bestimmt. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-32 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Es soll nun berechnet werden, wie groß die Kraft zweier paralleler stromdurchflossener Leiter aufeinander ist. Bild 3.34 Parallele stromdurchflossene Leiter Der Strom I1 im Leiter 1 erzeugt an der Stelle des Leiters 2 im Abstand a die Induktion: B(I1 ) I = µ 0 2 I1 2πr = µ0 r =a (3.113) I1 2πa Da die Induktion senkrecht auf der Richtung des Stroms im Leiter 2 steht, kann die Kraft einfach berechnet werden: F = µ0 ⋅ l ⋅ I1 ⋅ I 2 2π ⋅ a (3.114) Wenn man nun die Länge und den Abstand der Leiter mit jeweils 1 m festlegt, so werden zur Erzielung einer Kraft von 0,2 µN in jedem Leiter 1 A benötigt (Definition der Einheit A). Werden die Leiter entgegengesetzt vom Strom durchflossen, entsteht eine abstoßende Kraft, bei gleichsinnigem Strom eine anziehende Kraft. Hinweis: Zwischen stromführenden Kabeln entstehen Kräfte. Die Kabel müssen daher abgestützt werden. Beispiele: 1.Halleffekt B Fel I - - - - - - - - -F Uh mag Bild 3.35 Halleffekt Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-33 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Ein magnetisches Feld durchsetzt einen Leiter. Auf die Ladungsträger wird eine magnetische Kraft senkrecht zur Stromflussrichtung ausgeübt. Diese Kraft lenkt die Ladungsträger ab. Elektronen werden im Beispiel nach unten abgelenkt, d.h. Ladungsanhäufung am unteren Rand des Leiters. Damit entsteht eine Hallspannung Uh ~ B I. Verwendung zu Messzwecken (Magnetfeld, berührungslose Strommessung, Abstandssensoren mit zusätzlichem Permanentmagneten). 2. Kraftwirkung auf eine bestromte Spule (pro Windung): Spule B F M F Bild 3.36 Kraft auf stromdurchflossene Windung in einem Magnetfeld Kraft auf jeden der Leiter im Abstand a ist: F=BIl (3.115) Bei angegebener Winkelposition: M = 2⋅F⋅ a = B ⋅ I ⋅ l ⋅ a = I ⋅ B ⋅ A Spule 2 (3.116) Bei Veränderung der Winkelposition um α: M = I ⋅ B ⋅ A Spule ⋅ cos α (3.117) 3. Drehspulinstrument (Strommessung) Weicheisen Spiralfeder Drehspule Bild 3.37 Prinzip eines Drehspulmesswerks Permanentmagnet Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-34 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Mit M=B I A und α=M c folgt α~I, d.h. der Winkel α ist proportional dem Strom I. 4. Lautsprecher: Feder Membran Rahmen Tauchspule Ringmagnet Weichmagnetische Flussführung Bild 3.38 Lautsprecher 5. Elektromotor (Prinzip): Weicheisen Spulen Permanent- oder Elektromagnet Bild 3.39 Prinzip eines Drehspulmesswerks Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-35 Einführung in die Elektrotechnik Teil I 3.3 Kapitel 3: Elektrische und magnetische Felder Zeitlich veränderliche magnetische Felder 3.3.1 Induktionsgesetz In einem magnetischen Feld befindet sich eine offene Leiterschleife (siehe Bild 3.40). Bild 3.40 Offene Leiterschleife im magnetischen Feld In einem magnetischen Feld befindet sich eine offene Leiterschleife. Experimentell wird Folgendes festgestellt: Bei einer zeitlichen Änderung von B entsteht eine Spannung Ui zwischen den Enden der Leiterschleife. Die Spannung hängt von der Änderungsgeschwindigkeit von B ab: ui ~ Bei einer Änderung der von B durchsetzten Fläche durch Bewegung der Schleife entsteht ebenfalls eine Spannung Ui. Die Spannung ist proportional der Änderungsgeschwindigkeit der Fläche A: Ui ~ dB dt dA dt Bei einer Drehung der Leiterschleife entsteht auch eine Spannung Ui. Die Spannung ist hier proportional zu der Änderungsgeschwindigkeit des Winkels zwischen Leiterfläche und B-Feld: Ui = d cos(∠ B, A dt ( ) Die Spannung hängt offensichtlich von der Änderung des Flusses durch die Leiterschleife ab. Es ergibt sich: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-36 Einführung in die Elektrotechnik Teil I ui = − Kapitel 3: Elektrische und magnetische Felder dΦ dt (3.118) Dieser Zusammenhang wird Induktionsgesetz genannt. Er kann durch das Einführen vektorieller Feldgrößen verallgemeinert werden: d E ⋅ d s = − B ⋅ dA ∫ dt A∫ (3.119) Gleichung (3.119) wird als Induktionsgesetz oder 2. Maxwellsche Gleichung in Integralform bezeichnet. Das Linienintegral der elektrischen Feldstärke entlang einer Leiterschleife ist gleich der zeitlichen Änderung des von der Leiterschleife umrandeten Flächenintegrals der magnetischen Induktion. Auf dem Induktionsgesetz beruht die Wirkung des Generators. Eine Leiterschleife rotiert in einem magnetischen Feld (siehe Bild 3.41). B Ui Bild 3.41 In einem Magnetfeld rotierende Leiterschleife Es entsteht eine an den Klemmen abgreifbare Spannung, die sich zeitlich sinusförmig ändert: ui = - dΦ d = (B ⋅ A ⋅ cos ∠ B, A ) = 2 ⋅ π ⋅ n ⋅ B ⋅ A ⋅ sin (2π ⋅ n ⋅ t ) dt dt ( ) (3.120) Das Formelzeichen n steht für die Drehzahl der Leiterschleife. 3.3.2 Bewegung einer Leiterschleife im konstanten Magnetfeld Das Induktionsgesetz kann durch das Gleichgewicht zwischen magnetischen und elektrischen Kräften erklärt werden. Dazu wird in einem Gedankenexperiment eine Leiterschleife in ein homogenes magnetisches Feld hineinbewegt (Bild 3.42 links). Physikalisch ist dies gleichbedeutend mit einem Leiter, der auf Kontaktschienen durch das Feld bewegt wird (Bild 3.42 rechts). Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-37 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Bild 3.42 In ein Magnetfeld hineingeschobene (bewegte) Leiterschleife Wenn dieser Leiter in einem Magnetfeld bewegt wird, so wird auf die beweglichen Elektronen eine Kraft ausgeübt. Diese beträgt: Fm = Q ⋅ v × B ( ) (3.121) Diese Kraft bewegt die im Leiterstab enthaltenen Ladungen vom Ende 1 zum Ende 2 des Leiters mit der Länge l. Es entsteht nach Gleichung (3.1) eine elektrische Feldstärke im Leiter, die wiederum eine elektrische Kraft hervorruft: Fel = Q ⋅ E (3.122) Ein Gleichsetzen der beiden Kräfte nach Gleichung (3.121) und (3.122) ergibt: E = v×B (3.123) Durch Integration der Gleichung (3.123) über die Länge der Schleife ergibt das Induktionsgesetz: r2 ui = ∫ r1 r2 d dΦ ds v × B ⋅ d l = − ∫ × d l ⋅ B = − ∫ B ⋅ dA = − dt dt A dt r1 ( ) (3.124) links: Spatprodukt; Vertauschen => Vorzeichenwechsel. 3.3.3 Selbstinduktion Der von der Leiterschleife erzeugte Fluss hängt vom Strom und von der Geometrie der Schleife ab. Für eine lange Spule gilt wie bereits in Kapitel 3.2.3.1 betrachtet: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-38 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Bild 3.43 Magnetischer Fluss einer langen Spule w⋅I l (3.125) B = µ⋅H (3.126) Φ = B⋅ π⋅r2 (3.127) H= Jede Windung der Spule ist mit dem Fluss Φ verkettet. Die gesamte Spule kann daher als Reihenschaltung von w Windungen betrachtet werden. Daher wird die Größe der Flussverkettung Ψ definiert: π⋅ r2 Ψ = w ⋅Φ = w ⋅µ ⋅ ⋅I l 2 (3.128) Die Proportionalitätskonstante zwischen Flussverkettung und Strom wird als Induktivität L bezeichnet. Aus Gleichung (3.128) folgt somit: L = w2 ⋅µ ⋅ π⋅r2 l (3.129) iL uL L Bild 3.44 Schaltsymbol der Induktivität L mit Strom- und Spannungszählpfeilen Formelzeichen: L Einheit: [L] = 1 H = 1 VsA-1m-1 In den bisherigen Betrachtungen wurden die Flussänderungen von außen erzeugt. Jede Spule erzeugt jedoch ein eigenes Magnetfeld. Dieses induziert wiederum eine Spannung in der Spule. Diese ergibt sich zu: Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-39 Einführung in die Elektrotechnik Teil I uL = Kapitel 3: Elektrische und magnetische Felder dΨ di = L⋅ dt dt (3.130) Gleichung (3.130) stellt das wichtige Grundgesetz für das Bauelement L dar (analog zum ohmschen Gesetz beim Widerstand R)! Die Spannung ui wird als Selbstinduktionsspannung bezeichnet. Das Vorzeichen ist gegenüber der von außen induzierten Spannung umgekehrt, da nun das Verbraucherzählpfeilsystem angewendet wird. Wenn an diese Spannung nun ein Verbraucher angeschlossen wird, wirkt der durch die induzierte Spannung getriebene Strom im gesamten Kreis so, dass dessen Magnetfeld der Flussänderung entgegenwirkt. Dieser Effekt wird als Lenzsche Regel bezeichnet: Induzierte Spannungen und Ströme haben eine solche Richtung, dass sie der Ursache ihrer Entstehung entgegenwirken, d.h. die Flussänderung zu verhindern versuchen. Eine stromdurchflossene Spule wirkt als Energiespeicher. Die im Feld einer langen Spule gespeicherte Energie beträgt: B Wm = V ∫ H ⋅ dB = π ⋅ r 2 ⋅ l ⋅ 0 H⋅B w⋅I µ⋅w⋅I 1 = π ⋅ r2 ⋅ l ⋅ ⋅ = ⋅ L ⋅ I2 2 l l 2 (3.131) Der Ausdruck für die magnetische Energie einer Spule gilt unabhängig von der Form der Spule. L = µ⋅w2 ⋅ 3.3.4 π⋅r2 w2 = l Rm (3.132) Magnetische Kopplung, idealer Transformator Bisher wurden Spulen als einzelne Bauelemente betrachtet. Es ist jedoch möglich, zwei Spulen in eine räumliche Nachbarschaft zu bringen. Die magnetischen Felder überlagen sich dann. Als Transformator bezeichnet man eine Anordnung aus mindestens zwei magnetisch gekoppelten Spulen. Als einfaches Beispiel ist hier eine Anordnung von zwei Spulen mit den Windungszahlen w1 und w2 auf einem Eisenkern gezeichnet (Bild 3.45). Transformatoren werden meist zur Energieübertragung eingesetzt. Daher fließt der Strom in eine Spule hinein (Primärspule, Index 1) und aus der zweiten hinaus (Sekundärspule, Index 2). Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-40 Einführung in die Elektrotechnik Teil I i1 Primärseite i2 Sekundärseite Kapitel 3: Elektrische und magnetische Felder ui1 ui2 Bild 3.45 Φ Zwei magnetisch gekoppelte Spulen. Prinzip des Transformators Der Transformator wird als ideal bezeichnet, wenn: keine Streuflüsse auftreten, d.h. der magnetische Fluss durch Spule 1 ist gleich dem Fluss durch Spule 2 (Φ = Φ1 = Φ2) keine Kupferverluste auftreten (R1 = R2 = 0), d.h. widerstandsloser Draht keine Eisenverluste auftreten der Eisenkreis ideal magnetisch leitet (µFe → ∞). Die folgenden Betrachtungen gelten zunächst für ein endliches µFe. Das Verhalten für unendlich leitfähiges Eisen ergibt sich aus dem Grenzübergang µFe → ∞. Die Induktivität L1 der ersten Spule kann aus den Material- und Geometriedaten des Eisenkerns berechnet werden (siehe Gleichung (3.129)): 2 L1 = w 1 ⋅ µ Fe ⋅ A Fe l Fe (3.133) Analog gilt für die zweite Spule: 2 L 2 = w 2 ⋅ µ Fe ⋅ A Fe l Fe (3.134) Beide Spule sind magnetisch miteinander gekoppelt. Der gesamte magnetische Fluss wird aus der Summenwirkung beider Spulen erzeugt: Φ (t ) = Ψ1 (t ) Ψ2 (t ) L1 ⋅ i 1 (t ) L 2 ⋅ i 2 (t ) = = − w1 w2 w1 w2 (3.135) Wenn die Ströme zeitlich veränderlich sind entstehen entsprechend Gleichung (3.130) auch Induktionsspannungen in den beiden Spulen: u i1 (t ) = w d d d d Ψ1 (t ) = w 1 ⋅ Φ 1 (t ) = L1 ⋅ i1 (t ) − 1 ⋅ L 2 ⋅ i 2 (t ) dt w2 dt dt dt Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung (3.136) 3-41 Einführung in die Elektrotechnik Teil I u i 2 (t ) = Kapitel 3: Elektrische und magnetische Felder w d d d d Ψ2 (t ) = w 2 ⋅ Φ 2 (t ) = 2 ⋅ L1 ⋅ i 1 (t ) − L 2 ⋅ i 2 (t ) dt dt w1 dt dt (3.137) Mit Φ1 = Φ2 folgt für die Spannungen durch Division der Gleichung (3.136) durch Gleichung (3.137): u i1 (t ) w 1 = u i 2 (t ) w 2 (3.138) Bei zeitlicher Veränderung der Ströme entspricht das Verhältnis der Spannungen dem Verhältnis der Windungszahlen. Im trivialen Fall von Gleichströmen sind beide Spannungen Null. Einsetzen von (3.137) in (3.138) ergibt: u i1 (t ) = w1 w2 w d d ⋅ 2 ⋅ L1 ⋅ i1 (t ) − L 2 ⋅ i 2 (t ) dt dt w1 (3.139) Durch Einsetzen von (2.76) und (2.77) in (2.79) oder (2.80) erhält man für den Grenzübergang µFE → ∞ zunächst das Verhältnis der Ableitungen der Ströme. Dieses entspricht bis auf eine Konstante auch dem Verhältnis der Ströme: i1 (t ) + C1 w 2 = i 2 (t ) + C 2 w 1 (3.140) Das Verhältnis der zeitlich veränderlichen Anteile der Ströme entspricht dem umgekehrten Verhältnis der Windungszahlen. Gleichströme sind voneinander unabhängig. Transformatoren werden in der Wechselstromtechnik eingesetzt. Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-42 Einführung in die Elektrotechnik Teil I 3.3.5 Kapitel 3: Elektrische und magnetische Felder Ein- und Ausschaltvorgänge an Induktivitäten Ein Strom kann sich in einer Spule nicht sprungartig ändern, da dazu eine unendlich hohe Spannung und Leistung notwendig wäre (siehe Gleichung (3.130)). In allen realen Schaltungen erfolgt daher eine Reihenschaltung einer Spule mit einem Widerstand (z.B. der ohmsche Widerstand der Spule selbst). 3.3.5.1. Einschalten einer realen Spule Im folgenden Beispiel ist die Spule L für t ≦ 0 stromlos. Zur Zeit t = 0 wird der Schalter S geschlossen. S t=0 U R iL uR uL L Bild 3.46 Ersatzschaltbild zur Berechnung des Einschaltvorgangs einer Induktivität L Die Maschenregel liefert für t ≧ 0: U = u R (t ) + u L (t ) (3.141) Für den Widerstand R gilt das ohmsche Gesetz: u R (t) = R ⋅ i L (t ) (3.142) Die Spule unterliegt der Selbstinduktion, d.h. es gilt das Grundgesetz entsprechend Gleichung (3.130): u L (t ) = L ⋅ di L ( t ) dt (3.143) Einsetzen der vorausgegangenen Gleichungen liefert die Differentialgleichung zur Berechnung des Einschaltvorgangs der Spule: U = i L (t ) ⋅ R + L ⋅ d i L (t ) dt (3.144) Mit der Randbedingung iL(0) = 0 (stromlose Spule zu Beginn) folgt die Lösung für den zeitlichen Verlauf des Spulenstroms (siehe Kapitel 3.1.4): t R − − ⋅t U U τ L i L ( t ) = ⋅ 1 − e = ⋅ 1 − e R R Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung (3.145) 3-43 Einführung in die Elektrotechnik Teil I Kapitel 3: Elektrische und magnetische Felder Aus dem Ergebnis (3.145) folgt durch Einsetzen in (3.143) der zeitliche Verlauf der Spulenspannung: u L (t ) = U ⋅ e R − ⋅t L =U⋅e − t τ (3.146) Der Quotient L/R ist charakteristisch für den zeitlichen Ablauf des Stromaufbaus. Er hat die Dimension einer Zeit und wird als Zeitkonstante τ des Stromkreises bezeichnet. τ= L R (3.147) [τ] = Vs/A.Ω = Vs.A/V.A = s Bild 3.47 zeigt die zeitlichen Verläufe der Spulenspannung und des Spulenstroms für t ≧ 0. Werte für den berechneten Verlauf: U = 10 V R = 0,5Ω L=1H ⇒τ=2s Bild 3.47 Zeitliche Verläufe des Spulenstroms und der Spulenspannung beim Einschaltvorgang der Induktivität für t ≧ 0 Auch hier lassen sich für bestimmte ausgezeichnete Zeitpunkte einige wichtige Feststellungen über die Wirkungsweise der Spule zusammenfassen: Zeit t=0 Spule wirkt wie „Leerlauf“ t=τ t→∞ uL(t) u L (0) = U u L (τ ) = „Kurzschluss“ 1 ⋅U e u L (∞ ) = 0 iL(t) i L (0) = 0 i L (τ) = i C (∞ ) = U 1 ⋅ 1 − R e U R Tabelle 3.3 Verhalten der Spule zu bestimmten ausgezeichneten Zeitpunkten Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-44 Einführung in die Elektrotechnik Teil I 3.3.5.2. Kapitel 3: Elektrische und magnetische Felder Ausschalten einer realen Spule Mit dem in Bild 3.48 dargestellte Ersatzschaltbild kann der Ausschaltvorgang einer Spule untersucht werden. R t=0 S 1 U iL uR S2 uL t=0 L Bild 3.48 Ersatzschaltbild zur Berechnung des Ausschaltvorgangs einer Spule Der Schalter S1 sei lange Zeit geschlossen gewesen, sodass der stationäre Zustand vorliegt, d.h. in der Spule fließt der stationäre Spulenstrom. Dieser kann mit (3.145) berechnet werden, indem man den Grenzwert für t → ∞ berechnet. Es ergibt sich für den Spulenstrom zum Zeitpunkt Null (Anfangsbedingung) der Betrachtung des Ausschaltvorgangs: i L (0 ) = U R (3.148) Nun soll der Strom in der Spule abgeschaltet werden. Dazu wird in einem Gedankenexperiment zunächst S1 geöffnet. Es gilt: u L (t ) = L ⋅ d i L (t ) dt (3.149) Da der Strom nun keine Möglichkeit mehr hat um weiterfließen zu können, müsste die Spannung an der Spule unendlich werden, da diL(t)/dt im Ausschaltzeitpunkt unendlich groß würde. In realen Anwendungen würde dies zum elektrischen Durchschlag des Schalters und zur Ausbildung eines Lichtbogens, der die Energie der Spule aufnimmt, führen. Damit dies nicht passieren kann, wird zum Zeitpunkt t = 0 zeitgleich zum öffnen des Schalters S1 der Schalter S2 geschlossen. Damit kann der Strom im „kurzgeschlossenen“ Kreis weiterfließen. Die zugehörige Differentialgleichung lautet: 0 = i L (t) ⋅ R + L ⋅ d i L (t ) dt (3.150) Mit der obigen Anfangsbedingung (3.148) für den Strom ergibt sich der zeitliche Verlauf für den Strom und die Spannung an der Spule für den Ausschaltvorgang zu (siehe Kapitel 3.1.4): R t U − L ⋅t U − τ i L (t) = ⋅e = ⋅e R R Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung (3.151) 3-45 Einführung in die Elektrotechnik Teil I u L (t ) = − U ⋅ e − Kapitel 3: Elektrische und magnetische Felder t τ (3.152) Im nachfolgenden Bild 3.49 sind die zeitlichen Verläufe von Strom und Spannung für den Ausschaltvorgang der Spule dargestellt. Werte für den berechneten Verlauf: U = 10 V R = 0,5Ω L=1H ⇒τ=2s Bild 3.49 Zeitliche Verläufe des Spulenstroms und der Spulenspannung beim Ausschaltvorgang für t ≧ 0. (Beachte negative Werte auf der Spannungsachse) Beispiel: Zündspule u, i Ri i1 i2 i1 u1 u1 u2 UBat u, i S1 u2 Schließen S1 i2 Öffnen S1 Bild 3.50 Funktionsprinzip einer Zündspule sowie Verläufe von Spannung und Strom Kondensator über Kontakt S1 reduziert Spannung an S1 Schalter: heute Transistor Zündzeitpunktverstellung: früher Fliehkraft, heute elektronisches Motorsteuergerät Institut für Leistungselektronik und Elektrische Antriebe Abteilung Elektrische Energiewandlung 3-46