Streckenidentifikation. Ermittlung von Regelkennwerten aus dem
Werbung

Prof. Dr. Tatjana Lange
Lehrgebiet: Regelungstechnik
Laborübung 04/05:
Thema:
Streckenidentifikation. Ermittlung von Regelkennwerten aus dem
offenen Regelkreis
1. Übungsziele:
Vertiefung ausgewählter Methoden der Streckenidentifikation aus der Sprungantwort und der Ermittlung von Regelkennwerten aus dem Frequenzgang der offenen
Strecke
Demonstration moderner, rechnergestützter Identifikationsverfahren
Demonstration des Verhaltens geschlossener Regelkreise und Vergleich der
tatsächlichen Regelkennwerte mit den aus dem offenen Regelkreis ermittelten Werten
2. Grundlagen:
2.1. Experimentelle Systemidentifikation
Kennfunktionen des dynamischen Übertragungsverhaltens eines Systems
g(t)
u(t)
sind
↔
G(f)
↔ U(f)
x(t)
↔
X(f)
die Gewichtsfunktion (Stoßantwort)
g (t )
die Übergangsfunktion (Sprungantwort) h (t )
Kennfunktionen im
Zeitbereich
G (f ) bzw. G( jω),ω = 2πf
die Übertragungsfunktion G (p )
Kennfunktionen im
Frequenzbereich
der Frequenzgang
Der Zusammenhang zwischen diesen Kennfunktionen ist wie folgt gegeben:
g (t )
∫ g( t )dt ↓↑ dh (t ) / dt
h (t )
Fourier −
Transformation
}
↔
G (f )bzw. G ( jω)
p = δ + j2πf ↓↑ δ = 0
G (p )
Zur meßtechnischen Ermittlung dieser Kennfunktionen (experimentellen Identifikation)
benutzt man typischerweise folgende Schaltungsanordnungen
und Meßsignale:
Kennfunktion
Gewichtsfunktion
Übergangsfunktion
Frequenzgang / Übertragungsfunktion
Bereich
Zeitbereich
Zeitbereich
Frequenzbereich
Testsignal
sehr kurzer Impuls
Sprungsignal
harmonisches Signal
(punktweise Ermittlung)
T1 -, T2 -, T1 − TD1 -Glieder) lassen sich die Parameter der
G (p ) in der Zeitkonstantenform mit einfachen Mitteln aus der
Für einfache Systeme (z.B.
Übertragungsfunktion
Sprungantwort (Übergangsfunktion) ermitteln:
T1 -Glied:
G (p ) =
1
1 + pT1
T1
1
0,63
0
t
0
T1 − TD1 -Glied:
G (p ) =
1 + pTD
1 + pT1
T1
1
0,63(1-T /T )
D
1
TD/T1
TD < T1
0
0
t
T1 − TD1 -Glied:
1 + pTD
G ( p) =
1 + pT1
T1
TD /T
1
0,63(TD/T1-1)
(TD /T1-1)
1
TD > T1
0
T1
1
T2 -Glied:
G ( p) =
t
0
0,7
1
(1 + pT1 )(1 + pT2 )
T1 =
t 70
1,2(1 + q )
T2 = T1 ⋅ q
Diagramm zur Ermittlung des
Zeitkonstantenverhältnisses ð
siehe Anhang
1 Ermittlung von70t
h(t70 /4)
0
3
0 t 70 /4
Ermittlung
von h(t70 /4)
t
t70 ≈ 1,2(T1 +T2 )
2 Ermittlung von t 70 /4
Diagramm zur Ermittlung des Zeitkonstantenverhältnisses:
0,26
0,24
0,22
h(t70 /4)
0,2
0,18
4 Ermittlung von q
0,16
0,14
0,12
0,1
0
0,2
0,4
q=T2 /T1
0,6
0,8
1
2.2. Ermittlung der Reglerkennwerte aus dem offenen Regelkreis:
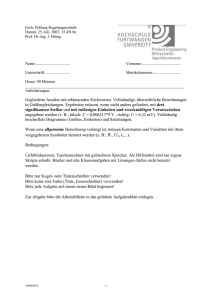
Wir betrachten den in Abb. 2.2.a. gezeigten Standard-Regelkreis, auf den eine sprungförmige
Störung z (t ) = 1 ⋅ σ(t ) wirkt.
x(t)
+
Regler
e(t)
GR(p)
Strecke
u(t)
-u(t)
x a(t)
GG(p)
–
x(t)
z(t)
Abb. 2.2.a: Standard-Regelkreis
(Idealisierte) Reglertypen:
GR ( p ) = K R
P-Regler
1
G R ( p) = K R 1 +
pTn
PI-Regler:
G R ( p) = K R (1 + pTv )
PD-Regler
1
G R ( p) = K R 1 +
+ pTv
pTn
Die Übertragungsfunktionen der PI-,PD- und PID-Regler sind so nicht realisierbar, da die für
reale Systeme geltende Bedingung "Nennenpolynom ≥ Zählerpolynom" nicht erfüllt ist
(näherungsweise Realisierung - s. Anlage 2).
PID-Regler
Für den in Abb. 2.2.a gezeigten Regelkreis sind folgende Regelkennwerte definiert:
Statische Kenngröße:
Dynamische Kenngrößen:
bleibende Regelabweichung
Überschwingweite
e(∞ ) = e B
Überschwingzeit
∆
h
tm
z(t)
z(t)
e(t)
eB
x(t)
t
t
∆
h
tm
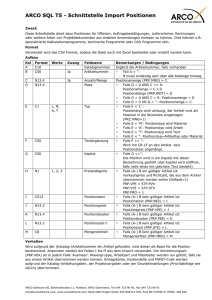
Es ist nun möglich, aus der Amplitudenkennlinie der offenen Kette (s. Abb. 2.2.b) diese drei
Kenngrößen zu ermitteln:
P-Ketten
I-Ketten
20lg|G(ω )|
-40dB/Dek
20log|K s |
ωs
20
Bereich I
stationäres
Verhalten
0
ωs
20
-20dB/Dek
ωs
Schnittfrequenz
Bereich II
dynamisches
Verhalten
ωs
20 ωs
ω
-40dB/Dek
Bereich II
ohne
Bedeutung
20 ωs
ω
-90
ϕ(ω)
γs >0 (positiver) Phasenrand
-180
Abb. 2.2.b: Typische Amplituden- und Phasenkennlinien für eine offene Kette
Unter der Voraussetzung, daß eine sprungförmige Störung
Regelkreis wirkt, gilt
eB =
Z0
1 + Ks ,
Tm ≈
π
ωs
z(t ) = Z0 ⋅ σ(t ) auf den
Z0 - Amplitude der sprungförmigen Störung
(
∆h [% ] ≈ 123
. 65ο − γ s
) nach Bauer
3. Übungsvorbereitung:
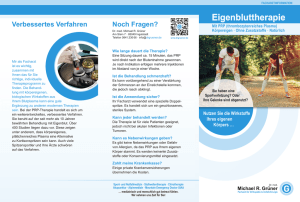
h(t)
3.1. Ermitteln Sie aus der nachfolgend dargestellten Sprungantwort eines unbekannten
Systems dessen Übertragungsfunktion und stellen Sie diese als Bodediagramm (nach
Betrag und Phase) dar.
1
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
0
10
20
30
40
50
t
60
70
80
90
100
[s]
3.2. Das von Ihnen identifizierte System soll nun zusammen mit
a) einem P-Regler mit dem Parameter K R = 100
b) einem idealen PD-Regler mit den Parametern K R = 100,TV
in einen Regelkreis gemäß Abb. 2.2.a. geschaltet werden.
= 50
3.3. Ermitteln Sie nun aus dem Bodediagrammen der offenen Kette für beide Fälle die
bleibende Regelabweichung e B , die Überschwingzeit Tm und die Überschwingweite
∆
h.
4. Übungsdurchführung:
4.1. Ermitteln Sie unter Nutzung des blockorientierten Simulationssystems BORIS die
Sprungantworten der mit den Superblöcken SYSTEM41.SBL, SYSTEM42.SBL,
SYSTEM43.SBL gegebenen Systeme:
Hinweis:
Simulationszeit = 100
Zeitablenkung am
Oszillographen: 20/Raster
Schaltungsanordnung:
4.2. Drucken Sie die Sprungantworten aus und identifizieren Sie anhand dieser
Sprungantworten die Parameter der Übertragungsfunktionen der Systeme.
4.3. Überprüfen Sie Ihre Ergebnisse für SYSTEM41.SBL, indem Sie dieses System unter
Nutzung von BORIS mit verschiedenen Testsignalen (Sprung, Stoß, Rechteckfolge,
Sinusschwingung, Rauschen) beaufschlagen, die Ein- und Ausgangssignale aufzeichnen
und aus diesen Daten mit dem Simulationsblock IDA das System erneut identifizieren.
Bewerten Sie dabei anhand der Restquadratsumme auch die Qualität der Approximation
und diskutieren Sie die Ergebnisse.
4.4. Die von Ihnen untersuchte Strecke SYSTEM41.SBL soll nun mit einem P-Regler zu
folgenden Regelkreis zusammengeschaltet werden:
x(t)
+
P-Regler
e(t)
GR(p)=K P
Strecke
u(t)
-u(t)
–
GG(p)
x a(t)
x(t)
z(t)
4.5. Ermitteln Sie unter Nutzung des Simulationsblocks LISA aus dem Bodediagramm der
offenen Kette
die bleibende Regelabweichung
Hinweis:
In LISA G 0 (p) in Polynomform
eB = e t → ∞
eingeben: ðDateiðSystem modifizieren
die Überschwingzeit Tm
Simulationszeit: 100
und, falls sinnvoll, die Überschwingweite
(
∆h
)
bei Wirken einer sprungförmigen Störung
z(t ) = σ(t ) am geschlossenen Regelkreis
für folgende Werte des Übertragungsfaktors K P des P-Reglers:
KR = 1
KR = 9
K R = 19
4.6. Simulieren Sie den geschlossenen Regelkreis und das Wirken der Störung mit dem
blockorientierten Simulationssystem BORIS und vergleichen Sie die aus dem
Bodediagramm der offenen Kette bestimmten Gütekenngrößen für das Regelverhalten
mit dem "experimentell" (d.h. mit BORIS) ermittelten Werten.
Schaltungsanordnung:
4.7. Überprüfen Sie durch Simulation mit BORIS die Ergebnisse der Übungsvorbereitung (s.
Pkt. 3)
4.8. Wiederholen Sie die Schritte 4.5. und 4.6. mit einem PI und einem PID-Regler und
vergleichen Sie die Ergebnisse.
Verwenden Sie dabei folgende Reglerparameter:
KR = 9
Tn = 10
TV = 10
Variieren Sie die Reglerparameter und beobachten Sie das Regelverhalten im
geschlossenen Regelkreis.
5. Übungsauswertung:
Diskutieren Sie die Ergebnisse und bewerten Sie die eingesetzten Reglertypen.
Anlage 1: Diagramm zur Ermittlung des Zeitkonstantenverhältnisses für
T2 -Glieder:
0,26
0,24
0,22
h(t 70 /4)
0,2
0,18
0,16
0,14
0,12
0,1
0
0,2
0,4
q=T2 /T1
0,6
0,8
1
Anlage 2:
Rückkopplungsschaltungen für die näherungsweise Realisierung von idealen Reglern:
PI-Regler:
Kv
G ( p) =
1 + Kv
Kv
-
=
pT
1
1+ pT1
Kv (1 + pT1 )
(1 + pT1 ) + Kv ⋅ pT1
lim G ( p) =
mit Kv → ∞
pT1
(1 + pT1 )
K v →∞
(1 + pT1 ) ) =
pT1
= 1+
PD-Regler:
Kv
G ( p) =
1 + Kv
Kv
-
=
K2
1+ pT2
mit Kv → ∞
pT
1
1+ pT1
(1 + pT2 ) + Kv K2
lim G ( p) =
K v →∞
K v →∞
mit Kv → ∞
Kv
G ( p) =
pT1 ⋅ K2
1 + Kv
(1 + pT1 )(1 + pT2 )
=
Kv (1 + pT1 )(1 + pT2 )
(1 + pT1 )(1 + pT2 ) + Kv K2 ⋅ pT1
1
(1 + pT2 ) = G R ( p)
K2
{
KR
lim G ( p) =
K2
1+ pT
2
K2
(1 + pT2 )
Kv (1 + pT2 )
PID-Regler
Kv
1
= G R ( p)
pT1
(1 + pT1 )(1 + pT2 )
K2 ⋅ pT1
T +T
pT
1
= 1 2 +
+ 2
K2 ⋅ T1 K2 ⋅ pT1 K2
bzw.
lim G ( p) = G R ( p) =
K v →∞
1
= K R 1 +
+ pTV
pTn
mit
T1 + T2
K R = K2 ⋅ T1
Tn = T1 + T2
TT
TV = 1 2
T1 + T2