Technische Mechanik – SS 05
Werbung

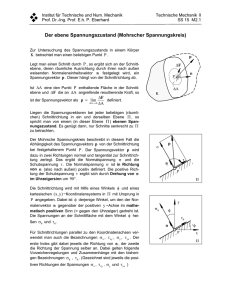
Technische Mechanik – SS 05 Prof. Dr.-Ing. habil. Schulze, HTWK Leipzig Mitschrift Zuletzt aktualisiert: 16. September 2005 Anmerkung: kursive Texte u.a. nicht von Prof. Schulze angesprochen -> aus Vorlage-Skript übernommen Inhaltsverzeichnis I. Einleitung…………………………………………………………………………….……… 4 I.1 Definitionen………………………………………………………………………………. 4 II. Statik starrer Körper……………………………………………………………………… 6 II.1. Einführung………………………………………………………………………………. 6 II.2. Die Kraft………………………………………………………………………………… 7 - Das Wesen der Kraft……………………………………………………………………… 7 - Verschiebbarkeit einer Kraft auf ihrer Wirkungslinie (Linienflüchtigkeit)……………… 8 - Einteilung der Kräfte……………………………………………………………………... 8 - Gesetz der Wechselwirkung……………………………………………………………… 9 - Äquivalenz d. Kräfte und Kräftegleichgewicht…………………………………………... 9 - Satz vom Parallelogramm der Kräfte…………………………………………………….. 9 - Äußere & innere Kräfte…………………………………………………………………... 10 - „Freimachen“ (des betrachteten Körpers)………………………………………………... 11 II.3. Kräftesysteme…………………………………………………………………………… 12 II.3.1. Ebene Kräftesysteme………………………………………………………………... 12 II.3.1.1. Kräfte mit gl. Wirkungslinie (nichtzentrales ebenes Kräftesystem)……………. 12 II.3.1.2. Zentrales ebenes Kräftesystem………………………………………………….. 12 II.3.1.3. Allgemeines ebenes Kräftesystem……………………………………………… 14 - Seileckverfahren……………………………………………………………………… 15 II.3.2. Räumliche Kräftesysteme…………………………………………………………... 16 II.4. Momente von Kräften…………………………………………………………………... 16 II.4.1. Moment einer Kraft…………………………………………………………………. 16 II.4.2. Kräftepaar…………………………………………………………………………… 16 II.4.3. Momentensatz für ebene Kräfte…………………………………………………….. 17 - Fall der Äquivalenz…………………………………………………………………….. 17 - Fall des Gleichgewichtes……………………………………………………………….. 17 II.5. Stütz- u. Verbindungskräfte starrer, statisch bestimmter Systeme………………………18 II.5.1. Einfache ebene Tragwerke in der Übersicht………………………………………... 18 II.5.2. Träger auf 2 Stützen………………………………………………………………… 20 II.5.3. Eingespannter Träger……………………………………………………………….. 21 II.5.4. Gerberträger………………………………………………………………………… 21 II.5.5. Räumliche Tragwerke………………………………………………………………. 22 II.6. Schnittkräfte und Schnittmomente……………………………………………………… 23 II.7. Fachwerke………………………………………………………………………………. 25 - Ideales Fachwerk…………………………………………………………………………. 26 - Rundschnittverfahren……………………………………………………………………27 - Rittersches Verfahren…………………………………………………………………... 27 II.8. Seile……………………………………………………………………………………... 29 II.9. Reibung…………………………………………………………………………………. 32 II.9.1. Coulombsche Reibung……………………………………………………………… 32 II.9.2. Seilreibung………………………………………………………………………….. 33 II.9.3. Rollreibung………………………………………………………………………….. 34 II.9.4. Modellierung von Reibungsprozessen……………………………………………… 35 - Gleitreibung…………………………………………………………………………….. 35 - 2 von 60 - - Prinzip von d’Alembert………………………………………………………………… 35 II.10. Schwerpunktsberechnung -> Selbststudium…………………………………………... 36 II.11. Standsicherheit (& Gleichgewicht)……………………………………………………. 36 - Arten des Gleichgewichts………………………………………………………………… 36 II.12. Mechanische Arbeit / Prinzip der virtuellen Arbeit…………………………………… 37 II.12.1. Grundlagen………………………………………………………………………… 37 - Wirkliche Arbeit………………………………………………………………………... 37 - Konstantes Moment…………………………………………………………………….. 38 - Virtuelle Arbeit (gedachte Arbeit)………………………………………………………38 - Virtuelle Verrückung…………………………………………………………………… 39 II.12.2. Prinzip der virtuellen Arbeit……………………………………………………….. 39 - Arbeitssatz der Statik…………………………………………………………………… 39 II.12.3. Lagrang’sches Befreiungsprinzip………………………………………………….. 39 III. Festigkeitslehre…………………………………………………………………………… 43 III.1. Grundformen der Beanspruchung……………………………………………………… 43 III.2. Begriff der Spannung…………………………………………………………………... 44 III.3. Einachsiger Spannungszustand………………………………………………………… 45 III.4. Zug- u. Druckversuch (Hooke’sches Gesetz)………………………………………….. 46 III.5. Dehnung & Querkontraktion…………………………………………………………... 47 III.6. Erweitertes Hooke’sches Gesetz……………………………………………………….. 48 III.7. Scherbeanspruchung…………………………………………………………………… 48 III.8. Biegebeanspruchung…………………………………………………………………… 49 - Berechnung d. Flächenmomente 2. Grades (Trägheitsmomente)………………………... 50 - Satz von Steiner…………………………………………………………………………... 52 - Hauptträgheitsmomente / Hauptträgheitsachsen…………………………………………. 52 - Biegung gerade Träger…………………………………………………………………… 52 - DGL der Biegelinie………………………………………………………………………. 53 III.9. Torsion…………………………………………………………………………………. 54 III.10. Wärmespannungen…………………………………………………………………….55 III.11. Knickbeanspruchung…………………………………………………………………..55 - Eulersche Knickfälle………………………………………………………………………56 III.12. Ebener und räumlicher Spannungszustand…………………………………………… 58 III.13.Zulässige Spannungen, Belastungsfälle, Beanspruchungsart, Festigkeitshypothesen…58 - Belastungsfälle (I bis III)…………………………………………………………………. 59 - 3 von 60 - I. Einleitung I.1 Definitionen Mechanik - (griech.) mechane = Werkzeug, Maschine - Aufgabe: Beschreibung der Bewegung von Körpern in der Umwelt -> s, v, a, Fi, Mi (eingeschlossen ist Sonderfall v=0 -> gesucht sind immer Beschleunigungsgleichungen Kinematik - (griech.) kinema = Bewegung - Def.: Lehre vom Zusammenhang der Bewegungsgrößen v, s, a; ohne Berücksichtigung der verursachenden Momente und Kräfte Kinetik - (griech.) kinetés = der Bewegte - Def.: Lehre von der allg. Bewegung unter Einbeziehung von sowohl Bewegungsgrößen s, v, b als auch der verursachenden Momente und Kräfte Statik - (lat.) stare = stehen - Def.: Lehre von der Berechnung ruhender Körper -> Statik ist der Sonderfall der Dynamik für v = 0 Dynamik - (griech.) dynamis = Kraft - Def: Oberbegriff von Kinetik und Kinematik zu verstehen Festigkeitslehre - Def: Berechnung von Spannungen und Verformungen von Körpern (Durchbiegung, Verdrehung) - 4 von 60 - Abgrenzung des Lehrinhaltes und Klassifizierung unter bestimmter Berücksichtigung der systemtheoretischen Betrachtungsweise - 5 von 60 - II. Statik starrer Körper II.1. Einführung - sK ist ein Gedankenmodell -> physikal. nicht real aber dennoch von großer prakt. Bedeutung - Annahme: starrer Körper (weil sonst nicht berechenbar, Auflager verschieben sich etc.) AH…Horizontalkraft im Festlager BV = F*a l AH* und BH* nicht berechenbar, da Verformung nicht bekannt -> Verformungen sind in prakt. Anwendungen so klein, dass sie vernachlässigbar sind Prüfungsfragen - Begründen Sie, warum Gedankenmodell des sK in der Statik sinnvoll ist! [Antw: Durchbiegung bei richtig dimensionierten Trägern ist sehr klein -> Unterschied zw. AV und AV* sehr gering] - Erklären Sie technische Mechanik und deren Bedeutung für die Elektrotechnik! - Erklären Sie Klassifizierung der technischem Mechanik! - Erklären Sie die Begriffe Kinematik, Kinetik, Dynamik, Statik und Festigkeitslehre! - 6 von 60 - II.2. Die Kraft Das Wesen der Kraft - als Kraft bezeichnet man die Wechselwirkung von Körpern - sie wird als Ursache ihrer Wirkung (weil unsichtbar) erklärt - ihre Wirkung kann bestehen in: -> Gegenkraft (starre, feste Körper) -> Formänderung (feste, deformierbare Körper) -> Bewegungsänderung (feste oder flüssige Körper) - welche Wirkung sich einstellt hängt von der Konstellation und dem Material der beteiligten Körper ab - die Kraft hat vektoriellen Charakter zur eindeutigen Festlegung einer Kraft gehören folgende Bestimmungsstücke: Bestimmungsstücke: 1. Größe -> a 2. Richtung -> α 3. Richtungssinn 4. Lage (bzw. Angriffspunkt) -> A Prüfungsfragen - Durch welche Bestimmungsstücke ist eine Kraft eindeutig festgelegt? - 7 von 60 - Verschiebbarkeit einer Kraft auf ihrer Wirkungslinie (Linienflüchtigkeit) - eine Kraft kann am sK, und nur für diesen, bel. verschoben werden (zu beachten bei konkreten Berechnungen) a…senkrechter Abstand zum Drehpkt. -> Kraft wirkt auch an Achse 1 genauso M1 = 0 ⇒ F*a = BV *l BV = F*a l Einteilung der Kräfte - 8 von 60 - Gesetz der Wechselwirkung „actio est reactio“ (3. Newtonsches Axiom) Äquivalenz d. Kräfte und Kräftegleichgewicht - Äquivalenz – alle Kräfte haben die gleiche Wirkung (E1 ,...,E 5 ) - Kräftegruppe 1 (F1 ,...,F4 ) - Kräftegruppe 2 (1) (E1 ,...,E5 ) = (F1 ,...,F4 ) Äquivalenzgruppe ( 2 ) (E1 ,...,E5 ; F1 ,...,F4 ) = 0 Gleichgewichtsgruppe Satz vom Parallelogramm der Kräfte -> Erfahrungssatz (Axiome…) -> Lageplan: für Richtung -> Kräfteplan: für Betrag d. Resultierenden - Äquivalenz: R = F1 + F2 - 9 von 60 - Aus mehreren Teilkräften ist die resultierende Kraft zu berechnen -> Umkehrung des Satzes vom Kraft-Parallelogramm zur Kräftezerlegung - resultierende R angeben - Richtung der gewünschten Zerlegung gegeben Äußere & innere Kräfte - äußere Kräfte: - Wirken von Umgebung auf einen Körper z.B. -> Eigengewichtskräfte -> äußere Belastungskräfte - innere Kräfte: - sind solche zw. einzelnen Teilen desselben Körpers - um Kräfte „gedankl. Sichtbar“ zu machen, muss man „schneiden“ -> Eulersches Schnittprinzip - 10 von 60 - Zugbeanspruchung -> beim Zusammenführen von S1 muss wieder Originalzustand entstehen Druckbeanspruchung - innere Kräfte: S1=G „Freimachen“ (des betrachteten Körpers) d.h., klare Formulierung der mechanischen Aufgabenstellung durch „Herauslösen“ aus der Umgebung oder: „geschlossener Schnitt“ „Befreien“ „Freischneiden“ „Befreiungsprinzip von Larange“ als Erweiterung (mit Querkräften & Momenten) des „eulerschen Schnittprinzips“ „Befreiungsprinzip von Lagrange“ - 11 von 60 - II.3. Kräftesysteme -> Klassifizierung der Kräftesysteme & Betrachtung Äquivalenz & Gleichgewicht II.3.1. Ebene Kräftesysteme II.3.1.1. Kräfte mit gl. Wirkungslinie (nichtzentrales ebenes Kräftesystem) Äquivalenz Gleichgewicht II.3.1.2. Zentrales ebenes Kräftesystem Lageplan - Wirkungslinien aller Kräfte treffen sich in einem Punkt - 12 von 60 - Kräftepan 3. Schritt: Parallelverschiebung der Resultierenden von Schritt 2 auf Schritt 1 -> im Regelfall wird R analytisch berechnet Analytisch: 1) sin/cos-Satz ist eine Möglichkeit –> nicht sehr vorteilhaft 2) Koordinatensystem einführen -> vorteilhaft F1y = F1*sinα ; F1x = F1*cosα F1 = F1y 2 + F1x 2 Beispiel: - 13 von 60 - R X = -F1X + F2X + F3X = F1*cosγ + F2 *cosα + F3 *cosβ R Y = F1*sinγ + F2 *sinα - F3 *sinβ R = R X2 + R Y2 tanδ = RX RY Gleichgewicht ∑F ix =0 ∑F iy =0 II.3.1.3. Allgemeines ebenes Kräftesystem - allgemein bedeutet, die Kräfte greifen nicht an einem Pkt. an - Lösungsvarianten: 1) graphisch durch Reduktion mit Hilfe von Teilresultierenden oder mit Hilfe des Seilecks 2) analytisch mit Hilfe des Momentensatzes 1) graph. Lösung: Wirkungslinien zweier Kräfte sind zum Schnitt zu bringen und die entsprechende Teilresultierende zu bestimmen -> dann erfolgt Zusammenfassen mit nächster Kraft, usw. -> dieses Verfahren versagt bei parallelen bzw. nah parallelen Kräften -> hierfür muss Seileckverfahren angewendet werden - 14 von 60 - Seileckverfahren Zuerst rechte Seite zeichnen, dann auf linke Seite übertragen Reihenfolge zur Vorgehensweise (Seileck): 1. Gegeben sind die Kräfte F1, F2, F3 (im Lageplan, nahezu parallel) Gesucht ist die Resultierende nach Betrag und Lage 2. Zu zeichnen ist der Kräfte-Plan (damit ist die Resultierende nach Betrag und Richtung bekannt, unbekannt ist aber die Lage im Lageplan) 3. Im Kräfte-Plan wird zweckmäßig, aber beliebig der Pol 0 gewählt und damit die Polstrahlen 1, 2, 3, 4 gezeichnet 4. Polstrahl 1 ist mit Wirkungslinie von F1 zum Schnitt zu bringen, anschließend sind gemäß Vorlage die Polstrahlen zu 2, 3, 4 einzutragen 5. Im Schnittpunkt der Schnittstrahlen 1 und 4 ist die Resultierende aus dem Kräfteplan einzutragen - 15 von 60 - II.3.2. Räumliche Kräftesysteme - im Prinzip alles wie bisher, nur analog erweitert - grundsätzlich nur analytische Betrachtungsweise II.4. Momente von Kräften II.4.1. Moment einer Kraft Festlegung: Links gedrehtes Moment = positives Moment Rechts gedrehtes Moment = negatives Moment II.4.2. Kräftepaar parallel, gegenläufig - 16 von 60 - Kraftschraube Prüfungsfragen 1. Durch welche Bestimmungsstücke ist Kraft definiert ? [Anw.: Größe, Richtung, Richtungssinn, Lage (bzw. Angriffspunkt)] 2. Gegeben sind mehrere Kräfte, die an einem Körper angreifen -> zur Mitte ist die Resultierende zu ermitteln 3. Wie ermitteln Sie grafisch zweckmäßig die Resultierende bei parallelen Kräften in der Ebene? [Antw.: Seileck-Verfahren] II.4.3. Momentensatz für ebene Kräfte - in gleicher Weise anwendbar für zentrale und allgemeine ebene Kräfte und für Äquivalenz und Gleichgewicht Momentsatz für ein beliebiges allgemeines ebenes Kräfte-System: - Eine vorteilhafte Alternative selbst für den Fall paralleler Kräfte - Das Moment der Resultierenden eines ebenen Kräfte-Systems für einen beliebigen Bezugspunkt 0 ist gleich der algebraischen Summe der Momente der Einzelkräfte für diesen Bezugspunkt -> Def. nur für sK, weil Linienflüchtigkeit vorausgesetzt ist - 17 von 60 - Fall der Äquivalenz Fall des Gleichgewichtes M0 = 0 M 0 = - F1 ia1 - F2 ia 2 - F3 ia 3 + R * ia r* F1 ia1 + F2 ia 2 + F3 ia 3 R* Wenn R * = R ⇒ a r * = a r a r* = II.5. Stütz- u. Verbindungskräfte starrer, statisch bestimmter Systeme II.5.1. Einfache ebene Tragwerke in der Übersicht - von statisch bestimmten Tragwerken spricht man, wenn alle Stützkräfte bzw. Stützmomente nur mit Hilfe der Gleichgewichtsbedingungen ∑ H i = 0 ; ∑ Vi = 0 ; ∑ M i = 0 für Kräfte und Momente eindeutig berechnet werden können - bei stat. unbestimmten Systemen kann d. Berechnung nur dann eindeutig erfolgen, wenn zusätzl. Verformungsbed. mitberücksichtigt werden Stützarten von Tragwerken (Wertigkeit von Auflagern) 1) Gleitlager (einwertig) – bewegliches Auflager Auflagekraft immer senkrecht zur Bewegungsebene (z.B. Pendelstütze) - 18 von 60 - 2) Gelenklager (zweiwertig) – festes Auflager 3) Einspannung (dreiwertig) Für konkrete Tragwerksberechnungen können die hier eingetragenen Kräfte (bzw. Momente) für beliebige Richtungen angenommen werden. Die Berechnung wird grundsätzlich mit den angenommen Richtungen durchgeführt. Erhält man für die angenommenen Kräfte (bzw. Momente) einen positiven Wert, so entspricht der angenommene Richtungssinn dem wahren Wert. Bei einem negativen Wert ist der Richtungssinn umzukehren. 1. Träger auf 2 Stützen 2. Eingespannter Träger (Kranträger) - 19 von 60 - 3. Gerberträger 4. Dreigelenkbögen II.5.2. Träger auf 2 Stützen Die Lösung aller statisch bestimmten ebenen Tragwerke erfolgt durch die Anwendung der 3 Beziehungen (für einen beliebigen Bezugspunkt der Ebene): Σ Hi = 0 Σ Vi = 0 Σ Mi = 0 - 20 von 60 - II.5.3. Eingespannter Träger MA…Einspannmoment ->d.h. das Stützmoment MA wirkt in entgegengesetzter Richtung II.5.4. Gerberträger Zur Berechnung des Gerberträgers ist der Gesamtträger jeweils an den Gelenken zu trennen. Zur Berechnung der Stützkräfte sind an jedem Gelenk Verbindungskräfte am linken und rechten Schnittufer entgegengesetzt einzutragen, sodass beim Zusammenfügen Σ Hi = 0 und Σ Vi = 0 ist. (Zu beachten: Durch ein Gelenk kann kein Moment übertragen werden!) - 21 von 60 - - I und II können in einfacher Weise wie Träger auf 2 Stützen berechnet werden -> sind also in jedem Fall statisch bestimmt - wichtig für die Berechnung ist, dass man mit dem richtigen Trägerteil beginnt -> hier II Lösung: Mg = 0 -> CV Mg = 0 -> VV Σ Mi = 0 -> VH Damit sind die Verbindungskräfte bekannt. Diese werden für den Träger 1 gemäß Bild als Belastung eingetragen. -> Berechnung des Träger 1 erfolgt leicht in bekannter Weise II.5.5. Räumliche Tragwerke - kein neuer prinzipieller methodischer Ansatz -> einfache analoge Erweiterung - einzige Besonderheit: es gibt 6 Freiheitsgrade „räumlicher Fall“ ∑ F = 0 ∑ F = 0 Translation (Verschiebung) ∑ F = 0 ∑ M = 0 ∑ M = 0 Rotation (Verdrehung) ∑ M = 0 ix iy iz -> grundsätzlich erfolgt die Berechnung analytisch x y z - 22 von 60 - II.6. Schnittkräfte und Schnittmomente - innere Kräfte & Momente, deren Kenntnis für d. Dimensionierung erforderl. ist - typische Aufgabenstellung: Für ein gegebenes mechan. System sind anzugeben die Diagramme für Normalkraft, Querkraft und Moment Allgemeine Zielstellung: • Ermittlung desjenigen Schnittpunktes bei einem Tragwerk, bei dem die höchste Materialbeanspruchung auftritt • Gesucht ist eine einfache Darstellung, die es Anschaulicherweise gestattet, dieses Problem zu lösen -> Es geht also um die Ermittlung sog. Schnittkraftdiagramme F ... Schnittkraft Die Schnittkraft ist im vorliegenden Fall eine Normalkraft Im Allgemeinen erhält man in der Schnittebene die folgenden Reaktionen: (BILD IN DER PRÜFUNG GEGEBEN) linkes Schnittufer rechtes Schnittufer Die rote gestrichelte Linie kennzeichnet die angenommene Zugzone. - 23 von 60 - N ... Normalkraft Q ... Querkraft M ... Schnittmoment Zugzone und positiv definierte N, Q, M sind in vorgegebener Weise festgelegt! Dieses Bild ist in Verbindung mit der angenommen Zone die positive Definition der Schnittkraftreaktionen. Vorgehensweise zur Ermittlung der Schnittkraftdiagramme: 1. Berechnung der Stützkräfte bzw. Stützmomente 2. Eintragen der in (1) berechneten Stützkräfte bzw. Stützmomente in physikalisch richtiger Wirkung (z.B. wenn BV negativ wäre, ist die Richtung umzukehren) Beispiel: - 24 von 60 - Dimensionierung erfolgt anhand maximaler Belastung (hier: Mitte) -> wesentliche Belastung & Beanspruchung folgt aus der Momentbelastung bei schlanken Trägern sind σ N & τ vergl. klein Q τ= Schubspannung Α M M σM = * y = → Hauptbelastung J W σN = N A Zugspannung Spannungsnachweis (in 2 Schritten): I ) σ ∑ = σΜ + σ Ν ! τ II ) σ ∑ < σ zulässig τ < τzulässig σ∑ nach Vorschrift Berechnung einer Vergleichsspannung σ V τ ⇒ σV < σ zulässig II.7. Fachwerke - behandelt werden nur ebene Fachwerke, die statisch bestimmt gelagert sind - Stützkräfte sind wie bisher zu berechnen - Fachwerke werden angeordnet um Material zu sparen, geringeres Gewicht usw. - 25 von 60 - Ideales Fachwerk 1. Alle Stäbe sind starr und gerade 2. Belastung: Einzelkräfte nur in den Knoten [durch Zug- oder Druckkräfte beansprucht] -> keine Momentbeanspruchung der Stäbe 3. Alle Stäbe sind gelenkig und reibungsfrei verbunden 4. Gelenk: Schnittpunkt der „angreifenden“ Stabachsen Die Berechnung der Stabachsen erfolgt im Normalfall analytisch Prüfungsfragen - Was verstehen Sie unter einem Fachwerk und welche vereinfachten Annahmen sind erforderlich, um eine einfache Berechnung durchzuführen? - Welche Berechnungsverfahren kennen Sie? (kurze Charakterisierung) - Welche Vorgehensweise ist für die Berechnung eines idealen Fachwerkes zu empfehlen? Berechnung 1. Stützkräfte (wie üblich) 2. Stabkräfte a) grafisch (Gremonaplan) -> Lös. Für gesamtes Fachwerk im Kräfteplan - heute seltener verwendet, da analytisches bevorzugt b) analytisch 1) Rundschnittverfahren - nach Berechnung d. Stützkräfte erfolgt Berechnung d. Stabkräfte durch Σ H = 0 und Σ V = 0 (Gleichgewichtsbeziehungen) für jeden Knoten i i - Begin zweckmäßiger Weise am äußeren Knoten - wesentl. Nachteil: Berechnungsfehler pflanzen sich durch gesamtes Tragwerk -> ! 2) Rittersches Verfahren („Ritter-Schnitt“ im Fachwerk) - im Regelfall das vorteilhafteste Verfahren - einfache Berechnung auch umfangreicher Tragwerke - keine Fehlerfortpflanzung - Schnelle Überprüfung von Rechenergebnissen, selbst bei sehr umfangreichen Fachwerken - 26 von 60 - 1) Beispiel zum Rundschnittverfahren 1) Berechnung der Stützkräfte -> B 2) ∑V = 0 i 3) ∑H i =0 S3V − B = 0 S3H − S2 = 0 ⇒ S3V ,S3 ,S3H ⇒ S2 = S3H 2) Beispiel zum Ritterschen Verfahren - 27 von 60 - -> AV, AH, BV sind berechnet und daher bekannt - mit eingetragenem Schnitt wird beabsichtigt, die geschnittenen Stabkräfte S2, S4, S5 zu berechnen (immer die Stabkräfte, wo der Schnitt durch geht) - zur Berechnung von den unbekannten Stabkräften kann man sowohl die linke als rechte Trägerhälfte verwenden - im Folgenden wird die rechte Trägerhälfte verwendet M IV = 0 ⇒ S2 (neg.) M II = 0 ⇒ S5 (pos.) rechtes Fachwerkteil M I = 0 ⇒ S4 (neg.) M II = 0 ⇒ S5 M IV = 0 ⇒ S2 linkes Fachwerkteil M I = 0 ⇒ S4 ∑H ∑H i = 0 ⇒ S1 (Knoten I) BV *l BV *l +S2 *h=0 S2 = − h BV *l -S5 *l =0 S2 = BV B *2*l BV *2*l +S4 *l =0 S4 = − V l - 28 von 60 - i = 0 ⇒ S3 (Knoten III) II.8. Seile - werden auch als biegeschlaffe Tragwerke bezeichnet, weil sie oft nur zugbeansprucht werden können - es gibt 2 typische Aufgabenstellungen: 1. Ermittlung der Seillage/~kurve 2. Ermittlung der Seilkräfte 2 Arten von Lösungen: 1) für genaue Lösungen ist die Ermittlung analytisch durchzuführen (mit DGL) 2) in vielen Fällen reicht ein grafisches Näherungsverfahren aus, und zwar das Seileckverfahren Der analytische Ansatz erfolgt in folgender Weise: ΣH=0 - S + dF + S + dS = 0 x x x x ΣV=0 - S + dF + S + dS = 0 y y y y -> Lösung dieser differentiellen Ansätze führt zur genauen Lösung - 29 von 60 - (nicht prüfungsrelevant) Näherungsverfahren mit Seileck (in vielen Fällen ausreichend): - einfache graph. Ermittlung der Seilkurve, Seilkräfte, sowie der Auflagerkräfte Prüfungsfragen - Gegeben sind die Lagerpunkte für die Aufhängung eines Seils, dass mit senkrechten Kräften belastet ist -> Zu bestimmen sind mit Hilfe des Seilecks die Seilkräfte, die Auflagerkräfte und die Seillage (u.U. ist der Durchhang vorgegeben)! - 30 von 60 - (1) Einfluss der Pollage auf die Seilkurve u. -Kräfte (2): - 31 von 60 - Anleitung: (1) Zeichnen des Kraftecks -> Beginn mit F1 und F2 (2) Wahl des Pols 0 entsprechend der Vorgaben (mit d. Wahl des Pols werden sowohl die Seillage als auch die Seilkräfte beeinflusst) II.9. Reibung II.9.1. Coulombsche Reibung -> Trockenreibung -> Erfahrungsgesetz -> Reibung hängt nicht von Fläche und Geschwindigkeit ab R=µ•N Coulomb - Reibungsvorgänge sind grundsätzlich nicht linear - Reibung ist grundsätzlich dort anzunehmen, wo Massen sind - das dynamische Verhalten von Massen mit Reibung kann unter bestimmten Voraussetzungen auch in Form eines Signalflussbildes dargestellt werden - 32 von 60 - Ruhereibungskoeffizient > Gleitreibungskoeffizient - eine wichtige technische Anwendung der Reibung ist die Seilreibung -> Standartbeispiel in der Fachliteratur II.9.2. Seilreibung -> Lösung ergibt sich durch Gleichgewichtsbedingung de Tangentialkräfte Gleichgewichtsbedingung in Achsenrichtung dα dα + dR = ( S+dS) ⋅ cos 2 2 ⇒ dR = dS S ⋅ cos dR = µdN = dS mit cos dα ≈1 2 (1) Gleichgewichtsbedingung senkrecht zur Achsenrichtung dα dα + ( S+dS ) ⋅ sin 2 2 dα dα dα ⇒ dN = S +S + dS 2 2 2 dN = S ⋅ sin dN = S ⋅ dα ( 2) mit sin dα dα ≈ 2 2 =0 - 33 von 60 - ( Bogenmaß ) (2) in (1): µ ⋅ S ⋅ dα = dS dS = µ ⋅ dα S Integration: α S1 dS 0 ∫ S = ∫0 µ ⋅ dα S0 [ln S]S S1 0 ⇒ ln e ln S1 S0 = lnS1 − lnS0 = ln S1 S0 S1 = µ ⋅ α0 S0 = S1 = e µ ⋅α 0 S0 S1 = S0 ⋅ eµ⋅α0 II.9.3. Rollreibung ∑V = 0 ⇒ A=G ⇒ G ⋅ f = A ⋅ f = MR M R ...Rollreibungsmoment f...Hebelarm der Rollreibung - 34 von 60 - II.9.4. Modellierung von Reibungsprozessen Gleitreibung nur bei ν ≠ 0 FR ( ν ≠ 0 ) Arten: (1) Festkörper-Reibung (trockene od. coulombsche Reibung) FC ± = µ r ⋅ FN (2) Flüssigkeitsreibung Fd = d ⋅ v (3) Misch-Reibung Prinzip von d’Alembert Translation ∑H i =0 i F − m ⋅ ɺɺ x=0 -> Vorschrift für eine Mischstelle - 35 von 60 - II.10. Schwerpunktsberechnung -> Selbststudium Prüfungsfrage - Was wissen Sie über Schwerpunktsberechnung (akademische Antwort!!!)? von Körpern von Flächen von Linien II.11. Standsicherheit (& Gleichgewicht) Arten des Gleichgewichts sicheres, stabiles Gleichgewicht unsicheres, labiles Gleichgewicht unentscheidendes, indifferentes Gleichgewicht - 36 von 60 - Standsicherheit (a) (b) S= M St MK MSt…Standmoment MK…Kippmoment (a) standsichere Lage: S > 1 (b) Kippgrenze: S=1 (c) Kippen: S<1 Kippachse -> richtet sich immer nach d. Lage d. Resultierenden im Verhältnis zur Kippachse Kippmoment = F * c (c…Hebelarm) (c) II.12. Mechanische Arbeit / Prinzip der virtuellen Arbeit II.12.1. Grundlagen 1) Wirkliche Arbeit = Kraft * Weg - 37 von 60 - 2) Virtuelle Arbeit (gedachte Arbeit) - 2 Möglichkeiten: 1. Wirkliche Kräfte und Momente „+“ „virtuelle“ Verrückungen (Oberbegriff für Verschiebung + Verdrehung) -> Fi , Mi 2. „virtuelle“ Kräfte und Momente „+“ wirkliche Verrückungen -> vx , vy , vz , φi - Def: 1) Eine gedachte, in Wirklichkeit nicht unbedingt in dieser Form eintretende Verschiebung 2) Infinitesimal kleine Verschiebung (aber von Null verschieden), wobei die Richtungsänderung der Verschiebungskräfte vernachlässigbar ist 3) Eine mit der geometrischen Konfiguration verträgliche Verschiebung, muss also geometrisch und physikalisch möglich sein, ohne die Auflager und Zusammenhangsbedingungen zu verletzen - 38 von 60 - 4) Verschiebung muss so langsam erfolgen, dass keine Trägheitskräfte zu berücksichtigen sind Virtuelle Verrückung - Verschiebung: δx , δr - Verdrehung: δφ • Virtuelle Arbeit einer Kraft δW = ∫ dF ⋅ δ r F • n Einzelkräfte n n δW = ∑ Fx1 ⋅ δri = ∑ Fx1 ⋅ δ x1 + Fy1 ⋅ δ y1 + Fz1 ⋅ δz1 i =1 i =1 ( ) • zusätzlich M j n m δW = ∑ Fi ⋅ δ ri = ∑ M j ⋅ δϕ i i =1 j=1 II.12.2. Prinzip der virtuellen Arbeit Arbeitssatz der Statik - die virtuelle Arbeit der äußeren Kräfte und Momente ist Null, wenn das System eine virtuelle Verrückung aus seiner Gleichgewichtslage erfährt -> auch die Umkehrung gilt: Ein mechan. System ist im Gleichgewicht, wenn bei jeder beliebigen Verrückung die virtuelle Arbeit aller äußeren Kräfte + Momente verschwindet - das Prinzip der virtuellen Arbeit ist eine Erweiterung der Gleichgewichtsbedingungen u. ist wie diese als Axiom aufzufassen n m ⇒ δW = ∑ Fi ⋅ δ ri = ∑ M j ⋅ δϕ i = 0 i =1 (Axiom!) j=1 II.12.3. Lagrang’sches Befreiungsprinzip - Ziel: einf. Berechnung von mechan. Systemen in Verbindung mit dem Prinzip d. virt. Arbeit - Stand bisher: Wird d. Bew. (eines mechan. Körpers) durch feste Lagerung verhindert, ist keine virtuelle Verschiebung möglich, d.h. Prinzip d. virt. Arbeit kann nicht sinnvoll angewendet werden -> Abhilfe durch Lagrang’sches Befreiungsprinzip: - 39 von 60 - o durch Schnitt bzw. Entfernen der Lagerfessel kann ein mechanisches System beweglich gemacht werden o dabei müssen ersatzweise die entsprechenden Schnitt- oder Lagerkräfte eingeführt werden, die als eingeprägte (äußere) Kräfte anzusehen ist Beispiel am Gerberträger Berechnung von A -> Es sind die Stützkräfte zu berechnen nach Prinzip d. virt. Arbeit δΑ 3a 3 = = δF 2a 2 3 ⇒ δΑ = ⋅ δF 2 δW = −A ⋅ δΑ + F ⋅ δF = 0 ⇒ −A ⋅ δΑ + F ⋅ δF = 0 3 3 −A ⋅ ⋅ δF + F ⋅ δF = −A ⋅ + F ⋅ δF = 0 2 2 2 A = ⋅F 3 oder Berechnung auf diese Weise: - 40 von 60 - δW = − M A δϕ + M Fδϕ = 0 = −A ⋅ 3a ⋅ δϕ + F ⋅ 2a ⋅ δϕ = [ −A ⋅ 3a + F ⋅ 2a ] ⋅ δϕ = 0 2 ⇒ A = ⋅F 3 Berechnung von B („über“ Verschiebung) δG 3a = ⇒ δG = 3 ⋅ δ F δF a δG 2a = ⇒ δG = 2 ⋅ δ B δB a 3 ⇒ 3 ⋅ δF = 2 ⋅ δB ⇒ δB = ⋅ δF 2 δW = − B ⋅ δB + F ⋅ δF = 0 3 3 − B ⋅ ⋅ δ F + F ⋅ δF = − B ⋅ + F ⋅ δ F = 0 2 2 2 B = ⋅F 3 - 41 von 60 - oder Berechnung „über“ virtuelle Verdrehung: δW1 = M Fδ ϕ1 + M G δϕ1 = 0 ⇒ M F + M G = 0 ⇒ M F + 3a ⋅ G = 0 δW2 = M Bδϕ2 + M G δϕ2 = 0 ⇒ M B + M G = 0 ⇒ M B + 2a ⋅ G = 0 MF MB = −G = −G 3a 2a M M F⋅a B⋅a ⇒ F = B⇒ = 3a 2a 3a 2a 2 B = ⋅F 3 - wesentlicher Vorteil: o nur die eingeprägten Kräfte gehen gleichmäßig in die virtuelle Arbeit ein, nicht aber die Bindungskräfte und Auflagerreaktionen o die gesuchten Kräfte bzw. das gesuchte Moment kann vorteilhaft isoliert im Ansatz berücksichtigt werden o unter Berücksichtigung des „Prinzips von d’Alembert“ kann das Prinzip der virtuellen Arbeit auch für die Lösung dynamischer Probleme verwendet werden - 42 von 60 - III. Festigkeitslehre III.1. Grundformen der Beanspruchung Zugbeanspruchung 1) 2) 1) Druckbeanspruchung 2) Knickbeanspruchung (Biegung infolge Druck bei schlanken Stäben) reine Biegebeanspruchung Schub infolge einer Torsionsbeanspruchung Schubbeanspruchung - 43 von 60 - III.2. Begriff der Spannung dS dA dN δN = dA dQ τ= dA δ res = - 44 von 60 - III.3. Einachsiger Spannungszustand einachsiger Spannungszustand: -> Berechnung der max. Normal- (σ) u. Schubspannung (τ) (ohne komplizierte Berechnung mithilfe des Mohrschen Spannungskreises) aus Mohrschem Spannungskreis folgt für: α=0 -> α=45 -> - 45 von 60 - σ= σmax τ=0 σ eine Zwischengröße τ= τmax III.4. Zug- u. Druckversuch (Hooke’sches Gesetz) σ= F A Dehnung: ε = ∆l l0 Elastizität σ = E⋅ε Hooke’sches Gesetz N E = tanϕ 2 E...Elastizitätsmodul cm 1 =α α...Dehnungs- od. Elastizitätsmaß E -> Versagen des Betons durch max. Schubspannung tanφ = E - 46 von 60 - Beispielaufgabe gesucht: ∆ l=? Lösung: ∆l = f ( E,A,l0 , F ) 1. ε = ∆l l0 2. σ = F A 3. σ = E ⋅ ε = ∆l ⋅E l0 F ∆l = ⋅E A l0 ∆l = F ⋅ l0 A⋅E III.5. Dehnung & Querkontraktion ε= ∆l l0 εq = Zug: d − D ∆d = D D ε q ...Querkontraktion ε > 0 ; εq < 0 Druck: ε < 0 ; ε q > 0 m= 1 ε = µ εq ε q = −µ ⋅ ε = −µ ⋅ m…Poissonsche Zahl σ σ = Ε m⋅Ε - 47 von 60 - µ …Querkontraktion III.6. Erweitertes Hooke’sches Gesetz räuml. Form des Hooke’schen Gesetzes hat drei Anteile σx = Fx Ax ⇒ ε xx = σx E µ ⋅ σx E analog für σ y , σz ε yx = ε zx = − ⇒ ε x = ε xx + ε xy + ε xz ε y = ... ε z = ... 1 σ x − µ ( σ y + σz ) E 1 ε y = σ y − µ ( σ x + σ z ) E 1 ε z = σ z − µ ( σ x + σ y ) E erweitertes Hooke'sches Gesetz εx = -> Längung bzw. Verkürzung in Kraftrichtung und entsprechende zwei Anteile aus d. Querkontraktion -> aufgrund d. Gültigkeit d. Superpositionsgesetzes können einzelne Anteile einzeln berechnet u. dann summiert werden III.7. Scherbeanspruchung - 48 von 60 - Beispiel dS ≈γ dx dS = γ dx tan γ = 1 1 F ⋅ τ dx = ⋅ dx G G A l F F⋅l S= ⋅ ∫ dx = G⋅A G⋅A 0 dS = F⋅l Analogie! ∆l = E⋅A III.8. Biegebeanspruchung - 49 von 60 - Berechnungsansätze zur Ableitung der Formel für die Biegespannung ∆dx dx nach Bernoulli: ∆dx ∼ y ⇒ ε ∼ y ε= und nach Hooke'schem Gesetz ( σ = ε ⋅ E ) ⇒ σ x = k ⋅ y ⇒ Bernoullische Annahme bedeutet lineare Spannungsverteilung im Querschnitt σx = M ⋅ y Iz Berechnung d. Flächenmomente 2. Grades (Trägheitsmomente) statistisches Moment (Flächenmoment 1. Grades): SMZ = ∫ y dA A Flächenmomente 2. Grades: 1. I z = ∫ y 2 dA A axiale Flächenträgheitsmomente 2. I y = ∫ z 2 dA A 3. (Flächenzentrifugalmoment): Izy = ∫ y ⋅ z dA A 4. (Polarflächenträgheitsmoment): IP = ∫ r 2 ⋅ dA A Iz + I y = ∫ ( y 2 + z 2 ) dA = I P A - 50 von 60 - Beispiel (Prüfungsstoff!) Zu berechnen ist das Flächenträgheitsmoment Iz = ∫ y 2 dA A + = h 2 ∫y 2 ⋅ b dy h − 2 1 = y3 ⋅ b 3 + h 2 − h 2 1 h3 1 h3 ⋅b+ ⋅b 3 8 3 8 b ⋅ h3 Iz = 12 = Wz = Iz 2 ⋅ Iz 2 ⋅ b ⋅ h3 b ⋅ h 2 = = = h h h ⋅12 6 2 b1 ⋅ h13 b ⋅ h 3 b 2 ⋅ h 23 + + 12 12 12 M σ x = ⋅ y!! Iz Iz = Iz = b ⋅h 3 b ⋅ h3 − 2⋅ 1 1 12 12 - 51 von 60 - Hauptträgheitsmomente / Hauptträgheitsachsen Achsen a und b ⊥ Ia − max. ⇒ Ia − min Iab = 0 Symmetrieachsen sind immer Hauptachsen Biegung gerade Träger Zielstellung ϑ( x) = f ( M(x), E, I, ...) = ? ⇒ ϑmax = ... usw. ϑ( x) … allg. Form der gesamten Biegelinie M(x) ... Momentgesetz in Abhängigkeit von der Länge (in allg. Form anzugeben) und entsprechend der Schnittkraftdefinition E ... Elastizitätsmodul I ... Flächenträgheitsmoment - 52 von 60 - DGL der Biegelinie Beziehung aus geometr. Verhältnissen gewonnen (entsprechend gewonnen aus reinen Belastungsüberlegungen) zu beachten ist, dass M(x) als Gleichung auszugeben ist Beispiel Für den folgenden Träger ist mit Hilfe der Biegelinie d. max. Durchbiegung zu ermitteln ME = F ⋅ l M(x) = −F ( l − x ) (M(x ) nach Def. VZ) M(x) E⋅I '' → E ⋅ I ⋅ ϑ = F (l − x ) ϑ'' ( x) = − x2 + C1 2 x2 x3 → E ⋅ I ⋅ ϑ = F ⋅ l ⋅ − F ⋅ + C1 ⋅ x + C 2 2 6 ' ϑ ( 0 ) = 0 → C1 = 0 → E ⋅ I ⋅ ϑ' = F ⋅ l ⋅ x − F ⋅ ϑ ( 0 ) = 0 → C2 = 0 - 53 von 60 - ϑ( x) = 1 F⋅l 2 x ⋅ x ⋅3 − 6 E⋅I l ϑmax = ϑ(l ) F⋅l 3⋅ E ⋅ I 3 Berechnung d. Durchbiegung wichtig aus zwei Gründen: 1) Nachweis d. Tauglichkeit d. entworfenen Konstruktion 2) Voraussetzung f. Berechnung stat. unbestimmter Systeme Durchbiegungen müssen berechnet werden, wenn die Stützreaktionen und Schnittkräfte für statische unbestimmte Tragwerke zu berechnen sind. III.9. Torsion b = ρ ⋅ tan dϕ b ≈ ρ ⋅ dϕ tan γ = ⇒ G⋅ b ≈ γ ( ρ) dx I P ...polares Flächenmoment 2. Grades → für typ. Querschnitte ablesbar ρ ⋅ dϕ → γ ( ρ) = dx Beziehungen aus rein geometr. Verhältnissen γ (ρ) = τ (ρ) G → Hooke'sches Gesetz für Schub dϕ dx Konstante Momentengleichgewicht um s: τ ( ρ) = ρ ⋅ G ∫ ρ ⋅ τ ( ρ ) dA = M dϕ ⋅ ∫ ρ2 dA = M T dx A dϕ M T = dx G ⋅ IP Drillung, DGL! eingesetzt in τ ( ρ ) : τ ( ρ ) = WP = IP r MT ⋅ρ IP WP ...polares Widerstandsmoment ⇒ τmax = T A → mit τ ( ρ ) = ... - 54 von 60 - MT ≤ τzulässig WP Beispiel G…Schubmodul dϕ M T = dx G ⋅ I P mit ϕ( 0) = 0 → C1 = 0 x MT dx G ⋅ IP 0 ϕ( x) = ∫ = ⇒ ϕ(l ) = ϕΒ = MT ⋅ l G ⋅ IP MT ⋅ x + C1 G ⋅ IP III.10. Wärmespannungen ∆l = a ⋅ ∆ϑ⋅ l ∆l = ε = α ⋅ ∆ϑ l mit σ = ε ⋅ E ⇒ σϑ = α ⋅ ∆ϑ⋅ E III.11. Knickbeanspruchung Prüfungsfragen - Unter welchen Bedingungen ist ein Nachweis für Knickbeanspruchung erforderlich und was sind die Besonderheiten? - Welche typischen Berechnungsfälle kennen Sie? Geben Sie eine kurze Einleitung! Knicken gerade Stäbe Bedingungen: -> schlanker Stab -> Druckbeanspruchung Versagen durch Biegung Ableitung d. kritischen Last mit Biegelinie Berechnung in der Praxis mit ω-Verfahren σ Dr = F⋅ω ≤ σDr,zulässig → Nachweis Knicksicherheit A Nachweis Knicksicherheit gegeben: 1. Geometrie -> l,A 2. Material -> E 3. Belastung -> F (Druckkraft) - 55 von 60 - Nachweis mit ω-Verfahren a) Imin aus Tabelle S b) λ = K λ...Schlankheitsgrad I min A c) ω aus Tabelle ω⋅ F d) σ = ≤ σ Dr,zulässig A - 56 von 60 - Beispiel ges: Besteht Knickgefahr? Lösung: s k = 2 ⋅ l = 2 ⋅ 35cm = 70cm ց ( d.h. Einspannung ) sk 70 = = 121 I min 4 A 12 2 b⋅h I h2 4 NR: I = ; A = b ⋅ h; = = 12 A 12 12 → ω = 2, 43 ( aus Tabelle) λ= σ= F ⋅ ω 18000 ⋅ 2, 43 N N = = 87, 48 → σ < 100 = σDr,zulässig für I und St 37 2 A 500 mm mm 2 aus Tabelle - 57 von 60 - III.12. Ebener und räumlicher Spannungszustand o Einachsiger Spannungszustand -> Vektor von σ Res stets dieselbe Richtung (auch beim einachsigen Spannungszustand können σ und τ gleichzeitig auftreten) Anwendung: - Zug (Druck) - reine Biegung o Ebener Spannungszustand - Schubspannungen sing gleich groß - aus ∑ Μ i = 0 für S -> τxy = τ yx (Satz von der Gleichheit zugeordneter Schubspannungen) -> gilt analog für räuml. Spannungszustand - Größe von σ und τ abhängig von Lage d. differentiellen Elementes III.13. Zulässige Spannungen, Belastungsfälle, Beanspruchungsart, Festigkeitshypothesen Zulässige Spannung - aus Berechnung: σ, τ - aus Versuch: σ B , τB - Sicherheitsfaktor: S (B – Bruchbelastung) (Festlegung!) -> zulässige Spannungen: σB ≥σ S aus Tafel τB τzulässig = ≥τ S σ zulässig , τzulässig abhängig von weiteren Randbedingungen σ zulässig = - 58 von 60 - Belastungsfälle (I bis III) Beanspruchungsart → Druck (Zug) einachsiger Spannungszustand → reine Biegung → Schub (infolge von Q) → Schub (infolge Torsion) ebener od. zweiachsiger Spannungszustand, wenn reine Biegung zusätzlich Zusammengesetze Beanspruchung Zug und Biegung (einachsig) F M σ=± ± A W einachsiger Spannungszustand - 59 von 60 - Festigkeitshypothesen praktische Umsetzung Berechnung einer Vergleichsspannung, die mit der „üblichen“ Spannung verglichen wird: σ V ≤ σzulässig Im „Normalfall“ allgemeiner Spannungszustand σ, τ gleichzeitig Zu beachten (Versuche): σ ≤ σzulässig ; τ ≤ τzulässig sind häufig nicht ausreichend maßgebend: σ V = f ( σ, τ ) σ V …Vergleichsspannung (od. „ideelle“ Spannung) σ V ≤ σ zulässig -> „Gesamtanstrengung“ - 60 von 60 -