FACHHOCHSCHULE Bielefeld Fachbereich
Werbung

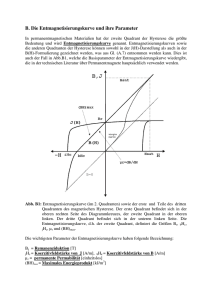
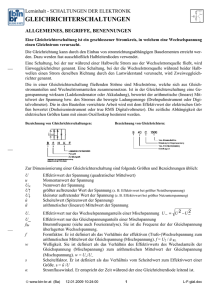
FACHHOCHSCHULE Bielefeld Fachbereich Elektrotechnik 8. Juli 2002 Professor Dr. Ing. habil. K. Hofer Klausur zu LEISTUNGSELEKTRONIK UND ANTRIEBE (LEA) Bearbeitungsdauer: 3.0 Zeitstunden Hilfsmittel: Vorlesungsskriptum, Formelsammlung, Seminarunterlagen, Taschenrechner Lösungsblätter ohne den Namen und die Matrikelnummer werden nicht bewertet. Die Aufgabenblätter bitte nicht mit abgeben. 1. Aufgabe (25 Punkte) Ein Drehstromsteller wird am öffentlichen Netz (230/400V-50Hz) betrieben. Der Stromrichter speist die Ständerwicklung einer Drehstromasynchronmaschine mit Kurzschlussläufer. Der Sternpunkt der Maschine ist mit dem Mittelpunktsleiter (Mp) des Netzes verbunden. Das Kippmoment des Motors ist dreimal so groß wie sein Nennmoment und beträgt MK = 55 Nm. Es tritt bei nK = 1200 min-1 auf. 1.1 Zeichnen Sie den kompletten Aufbau des elektrischen Antriebs. 1.2 Welche Ständergrößen kann der Drehstromsteller verändern und welche nicht? 1.3 Nennen Sie wenigstens drei Vorteile des Drehstromstellers gegenüber einem Drehstromtrafo. 1.4 Wo liegen die Haupteinsatzgebiete dieser Anordnung und warum? 1.5 Geben Sie die relative Abhängigkeit des Kippmoments der Maschine vom Effektivwert der Strangspannung an. 1.6 Zeichnen Sie die Drehzahldrehmoment-Kennlinien der Maschine für 100 %, 80 %, und 50 % der Nennspannung maßstäblich in ein Diagramm ein. 1.7 Geben Sie qualitativ den Verlauf der Strangspannung und des Strangstroms für α = 1220 und λ = 1070 an. Welchen Effektivwert hat die Motorspannung? 1.8 Erweitern Sie den Drehstromsteller zu einer vierpoligen Reversierschaltung. 1.9 Welche Thyristorpaare müssen für den Rechtslauf und Linkslauf angesteuert werden? Bitte lesen Sie alle Aufgaben in Ruhe durch, bevor Sie starten! 2. Aufgabe (25 Punkte) Zur Verlängerung der Lebensdauer einer 160 V-Notstrombatterie muss vom Ladegerät auch eine Entladung der Batterie durch Energierückspeisung ins Netz möglich sein. Dazu soll ein netzgeführter Stromrichter in B2-Schaltung eingesetzt werden, der über eine sehr große Glättungsinduktivität (Ld → ∞) im Gleichstromkreis einen konstanten Gleichstrom von 12 A liefert. Der Stromrichter wird wechselstromseitig an eine Steckdose (230V, 50 Hz) angeschlossen und darf für die folgenden Berechnungen als ideal betrachtet werden. 2.1 Muss der netzgeführte B2-Stromrichter für diesen Anwendungsfall ungesteuert, halbgesteuert oder vollgesteuert ausgeführt werden? a) LADEBETRIEB 2.2 Zeichnen Sie das vollständige Schaltbild der Anordnung für den Ladebetrieb. 2.3 Berechnen Sie die ideelle Leelaufgleichspannung und den stationären Steuerwinkel. Wie nennt man diesen Betriebszustand des Stromrichters? 2.4 Skizzieren Sie die zeitlichen Verläufe von Netzspannung und Netzstrom. 2.5 Berechnen Sie sämtliche Leistungsanteile (S, P, Q1, D) auf der Netzseite. b) ENTLADEBETRIEB 2.6 Zeichnen Sie das vollständige Schaltbild der Anordnung für den Entladebetrieb. 2.7 Berechnen Sie den stationären Steuerwinkel. Wie nennt man diesen Betriebszustand des Stromrichters? 2.8 Skizzieren Sie die zeitlichen Verläufe von Netzspannung und Netzstrom. 2.9 Berechnen Sie sämtliche Leistungsanteile (S, P, Q1, D) auf der Netzseite. 2.10 Wäre ein Entladen der Batterie auch mit einer halbgesteuerten Brücke möglich? 2.11 Wie müsste ein netzgeführter Stromrichter aufgebaut sein, der Laden und Entladen ohne Veränderungen am Schaltungsaufbau automatisch vornehmen kann. (Bezeichnung) Eine Musterlösung wird im Anschluss am LE-Labor ausgehängt! 2 3. Aufgabe (25 Punkte) Zwei Gleichspannungsquellen (UG1 und UG2) sind über die abgebildete Stromrichterschaltung miteinander verbunden. Zur Stromglättung ist eine Induktivität von L = 100 mH vorgesehen. Der IGBTLeistungshalbleiter wird mit einer Periodendauer von T = 0,1 ms pulsweitenmoduliert. Kommutierungsvorgänge und Schaltverluste dürfen vernachlässigt werden. iG1 T iG2 iD UG1 D UD L uL UG2 3.1 In welchem Verhältnis müssen die Mittelwerte der beiden Gleichspannungen zueinander stehen? (Begründung) 3.2 Geben Sie die Richtung des Energieflusses an. 3.3 Wie nennt man diese Schaltung und welchen Quadranten deckt sie ab? 3.4 Nennen Sie einen praktischen Anwendungsfall. 3.5 Für ein Tastverhältnis von 0,3 sind die zeitlichen Verläufe von iG1, iG2 und ud aufzuzeichnen. 3.6 Berechnen Sie die Stromschwankungsbreite für den Fall, dass UG1 = 126 V beträgt. 3.7 Skizzieren Sie den Spannungsabfall uL an der Induktivität. 3.8 Welchen Effektivwert und welche Frequenz hat die Spannung an der Induktivität? 3.9 Erweitern Sie obige Schaltung so, dass ein Energiefluss in beide Richtungen möglich ist. 3.10 Wie nennt man die Schaltungsanordnung nach Punkt 3.9? (Quadranten) Die Prüfungsergebnisse werden spätestens nächste Woche bekannt gegeben!! 3 4. Aufgabe (25 Punkte) Gegeben ist ein frequenzumrichtergespeister Drehstromasynchronantrieb mit einer Wellenleistung von 10 kW, der über ein Getriebe die Seiltrommel eines Portalkrans für kleine Container antreibt. Das auf die Motorwelle umgerechnete Massenträgheitsmoment und Widerstandsmoment des Containers betragen J = 1 Ws3 und MW = 15 Nm. Bei Nennfrequenz (400V, 50 Hz) hat die Maschine eine Nenndrehzahl von 1470 min-1. Zur Optimierung des Gesamtwirkungsgrades soll die potentielle Energie der Traglast ins Netz zurückgespeist werden. Sämtliche leistungselektronischen Bauteile sollen ideales Verhalten haben. 4.1 Skizzieren Sie den Aufbau des kompletten Antriebs als Blockschaltbild. 4.2 In welchen Quadranten arbeitet der Antrieb beim Heben und Senken? 4.3 Berechnen Sie das Nennmoment und den Nennschlupf der Maschine. 4.4 Tragen Sie die zulässigen Kennlinienäste der Asynchronmaschine für die Frequenzen 50 Hz, 30 Hz und 10 Hz maßstäblich in die M,n-Ebene ein. 4.5 Erklären Sie die Vorgehensweise bei einer Drehrichtungsumkehr. 4.6 Zeichnen Sie die Kennlinie des Krans (Hebezeug) unter Vernachlässigung von Reibungseffekten in das Diagramm unter Punkt 4.3 mit ein und markieren Sie die Arbeitspunkte mit den drei Kennlinien der Maschine. 4.7 Sind diese Arbeitspunkte stabil ? (Begründung) 4.8 Berechnen Sie die Hochlaufzeit des Hebezeugantriebs auf Nenndrehzahl für ein konstantes Beschleunigungsmoment. 4.9 Zeichnen Sie den Hochlauf maßstäblich auf. 4.10Mit welchem Regelverfahren der Asynchronmaschine ist ein linearer Hochlauf zu erzielen? Wir wünschen Ihnen einen klaren Kopf und viel Erfolg!!!! 4 Lösungen der LE-Klausur vom 08.07.2002 (nur Zahlenwerte) 1.1. Schaltung Drehstromsteller mit Motor 1.2. Effektivwert der Strangspannungen 0 <= Uα <= UaN bei f = 50Hz = const. 1.3. a) Hohe Leistungsdichte (kleiner); b) billiger; c) elektronisch regelbar 1.4. Sanftanlauf von DAM ab ca. 1kW-Nennleistung – preiswerter und verlustärmer als FU 1.5. Quadratische Abhängigkeit: MK/MKN = (Uα/UaN)² 1.5. a) Uu = 230V; MK = 55Nm; b) Uu = 184V; MK = 35,2Nm; c) Uu = 115V; MK = 13,75Nm 1.6. Uu = 125V 1.7. Bild 3.14 LE-Buch 1.8. Rechtslauf: T1, T2, T3; Linkslauf: T2, T4, T5 -------------------------------------------------------------------------------------------------------------2.1. Vollgesteuerter B2-SR (GR, WR) 2.2. Schaltbild: Ladebetrieb B2-SR mit L und Batterie 2.3. Gleichrichterbetrieb: Udi = 207V; α = 39,4° 2.4. Zeitlicher Verlauf von uL, iL, 2.5. S = 2760VA; P = 1920W; Q1 = 1577VAr; Qd = 1202VAr 2.6. Schaltbild: Entladebetrieb 2.7. Wechselrichterbetrieb: α = 140,6° 2.8. Zeitlicher Verlauf von uL, iL, 2.9. S = 2760VA; P = -1920W; Q1 = 1577VAr; Qd = 1202VAr 2.10. Nein, nur 1. Quadrant 2.11. B2-Umkehrstromrichter -------------------------------------------------------------------------------------------------------------3.1. UG1 > UG2 , sonst kein Stromfluss möglich. 3.2. Die Energie fließt von Batterie 1 (UG1) nach Batterie 2 (UG2). 3.3. Tiefsetzsteller (1Q-Chopper). 3.4. Elektronische Lichtmaschine in Elektrofahrzeugen (z.Bsp: 126V ⇒ 42V. 3.5. Zeitlicher Verlauf von iG1 , iG2, ud. 3.6. ∆ id = 27mA 3.7. Zeitl. Verlauf uL. 3.8. UL = 58V; f = 10kHz. 3.9. Zwei-Quadranten-Chopper für 1. und 2. Quadranten ------------------------------------------------------------------------------------------------------------4.1. Schaltbild Frequenzumrichter LE-Buch Bild 5.19 mit Getriebe und Seiltrommel 4.2. Quadrant 1 (Heben) und Quadrant 4 (Senken) 4.3. MN = 65Nm; sN = 2% 4.4. Drehzahl-Drehmoment-Kennlinie ähnlich Bild 6.2 LE-Buch 4.5. 1.Quadrant: Rechtsdrehfeld; 4.Quadrant: Linksdrehfeld; Softwaremäßiges Vertauschen zweier Phasen 4.6. Kennlinien 4.7. Arbeitspunkte sind aufgrund der negativen Steigung der Maschinenkennlinien stabil. 4.8. tH = 3s 4.9. Diagramm: n, M = f(t) - Optimaler Hochlauf 4.10. Feldorientierte Regelung – Vektorstromregelung Stand: 07.2005 5