Komplett-Download
Werbung

Technische Universität Ilmenau
Fakultät für Informatik und Automatisierung
Institut für Technische Informatik und Ingenieurinformatik
Lehrgebiet Methodik des Hardwareentwurfs
Script zur Lehrveranstaltung
Analoge und Digitale Schaltungen
Studiengang Elektrotechnik/Automatisierungstechnik
Teil: Digitale Schaltungen
von Dr.-Ing. Norbert Hirt
Digitale Schaltungen
Inhalt
Einleitung
1.
Elektronische Bauelemente
1.1
1.2
1.3
1.4
1.5
1.6
1.7
2.
Elektronische Schalter
2.1
2.2
2.3
2.4
2.5
(42 Seiten)
Widerstände
1.1.1
Lineare Widerstände
1.1.2
Fotowiderstände
1.1.3
Nichtlineare Widerstände
1.1.3.1 Varistoren
1.1.3.2 Heißleiter (NTC-Widerstände, Thermistoren)
Kondensatoren
Induktivitäten (Übertrager, Relais)
Halbleiterdioden
1.4.1
Universal- und Schaltdioden
1.4.1.1 Statisches Verhalten
1.4.1.2 Statische Kennwerte
1.4.1.3 Dynamische Kennwerte
1.4.2
Z-Dioden
1.4.2.1 Kennlinie und Kennwerte
1.4.2.2 Anwendungsschaltungen mit Z-Diode
Bipolartransistoren
1.5.1
Statische Eigenschaften, Ersatzschaltungen und Kennwerte
1.5.2
Bipolartransistor in Analogschaltungen (Verstärker)
1.5.2.1 Arbeitspunkteinstellung und -stabilisierung
1.5.2.2 Driftverhalten
1.5.2.3 Schaltungen zur AP-Stabilisierung
1.5.3
Transistor in Digitalschaltungen
1.5.3.1 Statisches Verhalten
1.5.3.2 Zur statischen Bemessung von Transistor-Schaltstufen
1.5.3.3 Schaltzeiten des Transistorschalters
Feldeffekttransistoren (FET, unipolare Transistoren)
1.6.1
Isolierschicht-Feldeffekttransistoren (MOSFET)
1.6.2
Sperrschicht-FET
1.6.3
Statisches Verhalten von MOSFET
1.6.3.1 Ausgangskennlinienfeld
1.6.3.2 Ersatzschaltbild und Kennliniengleichungen
1.6.4
FET als steuerbarer Widerstand
1.6.5
Schaltstufen mit FET
1.6.6
Dynamisches Verhalten von FET-Schaltstufen
Schaltverhalten einfacher passiver Zweitore (Spannungsteiler)
1.7.1
Schaltverhalten ohmscher Spannungsteiler
1.7.2
Schaltverhalten von RC-Gliedern
1.7.3
Schaltverhalten einer Induktivität
1.7.4
Zur Lösung linearer Differentialgleichungen
Idealer und realer Schalter
2.1.1
Statisches Verhalten
2.1.2
Dynamisches Verhalten
Schaltstufen mit Transistoren
2.2.1
Schaltstufen mit Bipolartransistor
2.2.2
Schaltstufen mit Unipolartransistor
2.2.3
Zur statischen Dimensionierung
Lastverhalten von Transistorschaltstufen
2.3.1
Statische Lastschaltungen
2.3.2
Schalten kapazitiver Lasten
2.3.3
Schalten induktiver Lasten
Gegentaktschaltstufen
Ungesättigte Transistorschalter
(16 Seiten)
Digitale Schaltungen
3.
Logische Elemente und Schaltungen
3.1
3.2
3.3
3.4
3.5
4.
Logische Grundfunktionen
Signalpegel in logischen Schaltungen
3.2.1
Positive und negative Logik
3.2.2
Pegelbereiche und Übertragungskennlinie
Kenngrößen logischer Schaltungen
3.3.1
Statische Kennwerte
3.3.1.1 Spannungspegel, Störabstand
3.3.1.2 Eingangs- und Ausgangsströme, Lastfaktoren
3.3.1.3 Ausgangsstufen
3.3.2
Schaltzeiten
3.3.3
Verlustleistung
Schaltungstechnische Realisierung elektronischer Verknüpfungsglieder
3.4.1
Schaltungen in Kontakttechnik
3.4.2
Dioden- und Transistorschaltungen
3.4.2.1 Diodenschaltungen
3.4.2.2 Transistorschaltungen
Zum Entwurf logischer Schaltungen
3.5.1
Entwurfsdarstellung und -verifikation
3.5.2
Simulationsarten
3.5.2.1 Circuit-Simulation
3.5.2.2 Switch-Level-Simulation
3.5.2.3 Logik-Simulation
3.5.2.4 Mixed-Mode-Simulation
Digitale Schaltkreisfamilien
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
(20 Seiten)
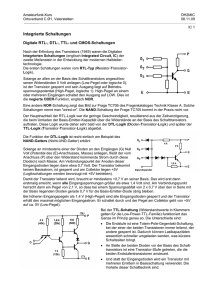
Dioden-Transistor-Logik (DTL, DZTL)
TTL-Schaltkreise
4.2.1
Überblick
4.2.2
Schaltung des NAND-Gatters 7400
4.2.3
TTL-Schaltungen mit offenem Kollektor
4.2.4
TTL-Schaltungen mit Tristate-Ausgängen
4.2.5
TTL-Schaltungen mit Schottky-Transistoren (STTL)
4.2.6
Kennwerte von TTL-Schaltungen
4.2.6.1 Signalpegel und statischer Störabstand
4.2.6.2 Eingangs- und Ausgangsströme
4.2.6.3 Dynamische Kennwerte
ECL-Schaltkreise
4.3.1
Allgemeines
4.3.2
Grundschaltung in ECL
4.3.3
Logische Verknüpfung in ECL
Integrierte Injektions-Logik (I2 L)
4.4.1
Grundschaltung der I2 L-Logik
4.4.2
Logische Verknüpfung bei I2 L-Schaltungen
4.4.3
Verzögerungszeit bei I2 L
n-MOS-Schaltkreise
CMOS-Schaltkreise
4.6.1
CMOS-Grundschaltungen
4.6.2
Transmissionsgatter, Analogschalter
4.6.3
Tristate-Schaltungen in CMOS-Technik
4.6.4
Kennwerte von CMOS-Schaltkreisen
4.6.4.1 Eingangskennwerte
4.6.4.2 Ausgangsstufen und -kennwerte
4.6.5
High-speed-CMOS-Baureihe 74 HC / 74 HCT
BICMOS-Schaltkreisreihe 74 BCT
Gallium-Arsenid-MESFET-Schaltkreise
(28 Seiten)
Digitale Schaltungen
5.
Rückgekoppelte Kippschaltungen
5.1
5.2
5.3
5.4
6.
Kodier- und Dekodierschaltungen
6.1
6.2
7.
7.2
8.
8.3
8.4
8.5
8.6
( 6 Seiten)
Dualzähler
7.1.1
Asynchrone Dualzähler
7.1.2
Synchrone Dualzähler
Dezimalzähler
7.2.1
Asynchrone BCD-Zähler
7.2.2
Synchrone BCD-Zähler
Interface-Schaltungen
8.1
8.2
(10 Seiten)
Kodewandler
6.1.1
Allgemeine Kodewandler
6.1.2
Dekodierer (Decoder)
6.1.3
Kodierer
Multiplexer und Demultiplexer
6.2.1
Demultiplexer
6.2.2
Multiplexer
6.2.3
Anwendungen von Multiplexern und Demultiplexern
6.2.4
Multiplexer / Demultiplexer als Funktionsspeicher
6.2.4.1 Multiplexer als Funktionsspeicher
6.2.4.2 Demultiplexer als Funktionsspeicher
Zähler und Frequenzteiler
7.1
(20 Seiten)
Flipflop-Schaltungen
5.1.1
Basis-Flipflop
5.1.2
Taktgesteuerte Flipflops
5.1.3
Logisches Verhalten von Flipflops
5.1.4
Parallel- und Schieberegister
5.1.4.1 Parallelregister
5.1.4.2 Schieberegister
Schmitt-Trigger (Schwellwertschalter)
Monoflops
5.3.1
Monoflop mit Logikgattern
5.3.2
Retriggerbare Monoflops
Impulsgeneratoren (astabile Multivibratoren)
5.4.1
Impulsgeneratoren mit Gatterschaltkreisen
5.4.2
Quarzgeneratoren
Allgemeine Betrachtungen
Pegelwandler
8.2.1
Pegelumsetzung zwischen Logikpegeln
8.2.2
Umsetzung zwischen Logikpegel und V.24-Pegel
8.2.3
Dioden-Begrenzerschaltungen für LSI-Schaltkreise
Anzeigeelemente und ihre Ansteuerschaltungen
8.3.1
LED-Anzeigeeinheiten
8.3.2
Ansteuerschaltungen für LED-Anzeigen
Optokoppler
8.4.1
Grundtypen von Optokopplern
8.4.2
Ansteuerung von LED in optischen Sendern
Busschaltungen
8.5.1
Sender mit offenem Kollektor
8.5.2
Sender mit Tristate-Stufen
Zur worst-case-Bemessung digitaler Schaltungen
8.6.1
Totales Fehlerdifferential
8.6.2
Praktisches Verfahren der Worst-Case-Analyse
8.6.3
Ersatzschaltungen für Ein- und Ausgangsstufen integrierter Schaltkreise
8.6.3.1 Ersatzschaltungen für Eingangsstufen
8.6.3.2 Ersatzschaltungen für Ausgangsstufen
8.6.4
Beispiele zur worst-case-Bemessung
(24 Seiten)
Digitale Schaltungen
9.
Halbleiterspeicher
9.1
9.2
9.3
9.4
10.
Anwendungsspezifische Integrierte Bausteine (ASICs)
10.1
10.2
10.3
10.4
11.
11.3
11.4
11.5
12.
12.4
12.5
(10 Seiten)
Allgemeiner Überblick
Störungen durch Leitungsreflexionen
11.2.1 Elektrisch lange Leitung, Wellenwiderstand
11.2.2 Schaltverhalten elektrisch langer Leitungen
Symmetrische und unsymmetrische Signalübertragung
Störungen durch Übersprechen
Störungen durch die Induktivität der Stromversorgungsleitungen
Bussysteme, Schnittstellen
12.1
12.2
12.3
(18 Seiten)
Überblick
Programmierbare logische Schaltungen
10.2.1 Prinzip
10.2.2 Varianten von PLD-Bausteinen
10.2.3 Programmier- und löschbare PLDs
10.2.4 Programmierbare Gate Arrays
Pinout und Gehäuseformen von PLDs/FPGAs
Überblick über FPGA-Familien
Störeinflüsse bei der Datenübertragung
11.1
11.2
(12 Seiten)
Allgemeiner Überblick
Festwertspeicher, ROMs
9.2.1 Zur Einteilung von ROMs
9.2.2 Schaltungstechnische Realisierung der Speichermatrix
Schreib-Lese-Speicher (RWM, RAM)
9.3.1
Statische RAMs
9.3.1.1 Aufbau und Funktionsweise
9.3.1.2 Dynamische Kenngrößen statischer RAMs
9.3.2
Dynamische RAMs
Speicher mit seriellem Zugriff
Überblick
Parallele Bussysteme
Serielle Schnittstelle, serielle Datenübertragung
12.3.1 Serielle Datenübertragung
12.3.2 Asynchrone und synchrone Datenübertragung
Einheitliche serielle Schnittstellen
12.4.1 RS-232C-, V.24-Schnittstelle
12.4.2 Schnittstellen nach der RS-422/485-Norm
Schnittstellenvergleich
(14 Seiten)
Digitale Schaltungen
Literatur:
/ 1/
Seifart, M.: Digitale Schaltungen. Verlag Technik Berlin, 1988.
/ 2/
Tietze, U.; Schenk, Ch.: Halbleiter-Schaltungstechnik.
Springer-Verlag Berlin-Heidelberg-New York 1988.
/ 3/
Kühn, E.: Handbuch TTL- und CMOS-Schaltkreise. Verlag Technik Berlin, 1985.
/ 4/
Seifart, M.: Analoge Schaltungen. Verlag Technik Berlin, 1987.
/ 5/
Roth, M.; Hirt, N.: Schaltungen für Digital-Analog- und Analog-Digital-Umsetzer.
In: Taschenbuch Elektrotechnik, Bd. 3/II (Hrsg. E. Philippow), Verlag Technik Berlin, 1988.
/ 6/
Schiffmann/Schmitz: Technische Informatik 1. Grundlagen der digitalen Elektronik.
(Springer-Lehrbuch) Springer-Verlag Berlin-Heidelberg-New-York-London-ParisTokyo-Hong Kong-Barcelona-Budapest 1993.
/ 7/
Borucki, L.: Digitaltechnik. B.G.Teubner Stuttgart 1989.
/ 8/
Beuth, K.: Digitaltechnik. Vogel Buchverlag Würzburg 1992.
/ 9/
Brauer/Lehmann: Elektronik-Aufgaben. Fachbuchverlag Leipzig 1988.
/10/
Dostál, J.: Operationsverstärker. Verlag Technik Berlin 1986.
/11/
Weißel, R.; Schubert, F.: Digitale Schaltungstechnik.
Springer Verlag Berlin-Heidelberg-New York-London-Paris-Tokyo-Hong Kong 1990.
/12/
Siegl, J.; Eichele, H.: Hardwareentwicklung mit ASIC. Einsatz und Anwendung von
CAE-Entwurfswerkzeugen (Reihe Mikroelektronik, Band 8).
Hüthig Buchverlag Heidelberg 1990.
/13/
Baumann, P./Möller, W.: Schaltungssimulation mit Design Center.
Fachbuchverlag Leipzig-Köln 1994.
/14/
Lehmann, C.: Elektronik-Aufgaben. Band II: Analoge und digitale Schaltungen.
Fachbuchverlag Leipzig-Köln 1994.
/15/
Scarbata, G.: Synthese und Analyse Digitaler Schaltungen.
R.Oldenbourg Verlag München Wien 1996
Anhang
Ü
P
Übungsaufgaben
Praktikumsaufgaben "Circuit-Simulation" (PSPICE)
Digitale Schaltungen
Einleitung
Die stürmische Entwicklung der Mikroelektronik hält seit der Erfindung des Transistors im Jahre
1948 ungebrochen an. Wesentliche Meilensteine dieser Entwicklung waren die Realisierung der
ersten integrierten Schaltungen um 1960 und die Einführung der ersten Mikroprozessoren um 1974
(einschließlich anwenderprogrammierbarer Speicher) als Vorläufer der gegenwärtigen Computer.
{ Der Integrationsgrad mikroelektronischer Bausteine und die Komplexität damit aufgebauter
elektronischer Systeme wachsen noch immer. Der technologische Stand der Halbleitertechnik
ermöglicht heute Integrationsgrade von über 105 ... 107 Transistorfunktionen pro Baustein mit
Strukturgeometrien im 100 nm - Bereich und kleiner.
Mit der Verfügung über enorme und kostengünstige Rechenleistung bietet sich die Möglichkeit,
auch komplexe Systemaufgaben mittels Software auf einer Standard-Hardware zu lösen.
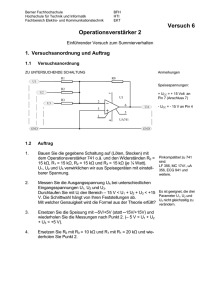
Heute kann bei der technischen Realisierung digitaler elektronischer Systeme zwischen einer
"Softwarelösung" und einer "Hardwarelösung" unterschieden werden (Bild 1).
{ Bei der Softwarelösung wird eine Standard-Hardware mit Universal- oder Signalprozessoren,
Speicher- und Peripheriebausteinen verwendet. Die anwendungsspezifische Lösung wird
dann durch ein entsprechendes Hochsprachprogramm (HLL - High Level Language) erreicht.
Die Verwandtschaft zu Lösungen komplexer Softwareaufgaben ist unmittelbar zu erkennen.
{ Bei Hardwarelösungen unterscheidet man Realisierungen mit Standard-Schaltkreisen und
Anwenderspezifischen Integrierten Schaltkreisen ASICs (PLD, Standard-Zellen, Gate-Array).
Im Gegensatz zu Softwarelösungen sind Änderungen nach der Implementierung nur noch
eingeschränkt möglich.
Technische
Realisierung
Softwarelösung
Mikroprozessoren
Speicher
Peripherieschaltkreise
Hardwarelösung
Standard-IC
analog
digital
CMOS, TTL
ASICs
Semi-Kunden-IC
Kunden-IC
Standardschaltkreise
Standardschaltkreise
Gate-Array
PLD
Standard-Zelle
vollständig vorgefertigt
vollständig vorgefertigt
vorgefertigt
Änderungen durch
Programm möglich
keine Änderungen
möglich
Änderungen bedingt möglich
z.B. Verbindungen, Plazierung
vorgefertigte
Makrozellen
Bild 1: Technische Realisierung elektronischer Systeme als Hard- oder Softwarelösung
Digitale Schaltungen
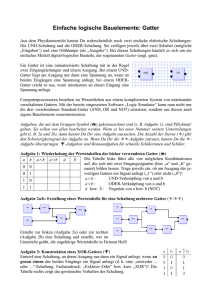
Parallell zu den technologischen Fortschritten wurden und werden leistungsfähige Verfahren und
Werkzeuge für den Entwurf komplexer Systeme entwickelt (CAE - Computer Aided Engineering).
Diese CAE-Werkzeuge bieten in Verbindung mit Bauteilbibliotheken vielfältige Verifikations- und
Testmöglichkeiten im gesamten Entwurfsprozeß ohne eine physikalische Realisierung (virtuelles
Labor). Wichtigstes Werkzeug zur Schaltungsverifikation ist die Simulation (Analyse und
Modifikation am Modell). Man unterscheidet u.a. zwischen
{ Device-Simulation: Simulation von Einzelhalbleitern und geometrischen Strukturen, z.B.
zur Ermittlung von Modellparametern,
{ Circuit-Simulation: Netzwerkanalyse (meist modifizierte Knotenspannungsmethode) auf
Basis von Transistor- bzw. Makromodellen von ICs; Ergebnisse dieser
Simulation sind typisch die Spannungs-/Stromverläufe im Zeitbereich,
{ Logik-Simulation: Berechnung der logischen Zustände (1-0-X) einer Logikschaltung bei
gegebenen Eingangsbelegungen.
CAE-Entwurfswerkzeuge
(auf CAE-Workstations)
Schaltungsstruktur
Schaltungsverifikation
(Simulation)
Schaltplaneingabe
Symbolgenerierung
Circuit-Simulation
Logik-Simulation
Layouterstellung
Dokumentation
Leiterplatten
ASICs
Bild 2: Einsatzbereiche von CAE-Werkzeugen beim Schaltungsentwurf
Bei der Entwicklung einer Hardwarelösung ist der Aufwand für den Aufbau von Versuchs- und
Testschaltungen aus Standardelementen, die Verifikation und Optimierung von Teilschaltungen
wegen der Komplexität der Gesamtsysteme und aus Zeit- und Kostengründen nicht mehr zeitgemäß
bzw. muß zumindest stark reduziert werden. Der Entwurf komplexer Systemfunktionen und deren
relativ kostspielige Realisierung in Silicium erfordert zunehmend eine systematische Methodik; ein
Entwurf muß bereits vor seiner Realisierung getestet und optimiert werden.
Physikalisch-technische Beschränkungen der späteren Realisierung (Parameter, Grenzwerte,
Restriktionen, ...) müssen schon in der Konzipierungsphase berücksichtigt werden. Dazu werden
vom Entwickler solide Kenntnisse in der Schaltungstechnik, über Schaltkreistechnologien sowie
über Entwurfswerkzeuge und deren Möglichkeiten gefordert.
Das gilt im Prinzip auch für den Entwurf technischer Realisierungen mittels einer Softwarelösung.
Jede Aufgabenstellung erfordert eine spezifische, in Leistungsumfang, Kosten usw. gut angepaßte
Rechnerkonfiguration aus einem sehr breiten Spektrum von Systemkomponenten mit spezifischen
Kenngrößen. Besonders wichtig dabei ist die Festlegung und Auswahl geeigneter Schnittstellen für
die Prozeßperipherie. Dazu werden zumindestens Kenntnisse über deren technische Realisierung
und der damit verbundenen Kennwerte und Eigenschaften vorausgesetzt.
{ Zur Entwicklung effektiver Systemlösungen muß ein Entwickler i.a. über ein breites
Spektrum von Grund- und Spezialkenntnissen aus unterschiedlichen Teilbereichen verfügen,
da moderne Lösungen zunehmend als integrierte Hard-/Softwarelösungen entstehen.
{ Die Verteilung der geforderten Grund-/Spezialkenntnisse auf die einzelnen Teilbereiche ist
für die einzelnen Entwickler unterschiedlich und aufgabenspezifisch.
Digitale Schaltungen
Die schnelle Weiterentwicklung der Halbleiter- und Digitaltechnik sowie die Bereitstellung immer
neuer und/oder komplexer werdender Funktionselemente und Entwurfswerkzeuge läßt Details
rasch veralten. Wir konzentrieren uns deshalb auf allgemeingültige Grundlagen und Kentnisse zur
digitalen Schaltungstechnik. Sie sollen helfen, den aktuellen Stand der Digitaltechnik einzuschätzen
und auch künftige Weiterentwicklungen zu erfassen und richtig einzuordnen. Gleichzeitig wird
damit der notwendige Hardwarehintergrund für andere Lehrveranstaltungen geliefert.
Das vorliegende Script entstand auf der Grundlage der Manuskripte zu den Lehrveranstaltungen
Rechnertechnik im Studiengang Informatik und Analoge und digitale Schaltungen im Studiengang
Elektrotechnik/Automatisierungstechnik an der Technischen Universität Ilmenau, die seit Jahren
vom Autor als Lehrbeauftragter wahrgenommen werden.
Das Script stellt in der vorliegenden Form bewußt eine teilweise erweiterte Fassung des Inhaltes der
Lehrveranstaltung Analoge und digitale Schaltungen (Teil Digitale Schaltungen) im Studiengang
Elektrotechnik/Automatisierungstechnik dar.
Dem interessierten Studierenden wird damit die Möglichkeit gegeben, sich mit der Hardwareproblematik über den in Vorlesung, Übung und Praktikum vermittelten Stoff hinaus eigenständig
zu beschäftigen.
Das Script wird ergänzt durch eine umfangreiche Sammlung von Übungsaufgaben zur Berechnung
digitaler Grundschaltungen sowie Anleitungen zu Praktikumsversuchen mit Entwurfswerkzeugen
zur Circuitsimulation (PSPICE) .
Ilmenau, im Oktober 2003
1. Elektronische Bauelemente
1
(OHNWURQLVFKH%DXHOHPHQWH
In diesem Abschnitt werden die Kennwerte und Eigenschaften der wichtigsten Bauelemente der
elektronischen Informationsverarbeitung zusammenfassend dargestellt. Dieser Überblick ist nicht
zum Einstieg in die Problematik gedacht, sondern dient den Ausführungen in den weiteren
Abschnitten als Bestandsaufnahme für die Schaltungstechnik mit diesen Elementen.
^ Auf eine physikalische Begründung bzw. Herleitung wird an dieser Stelle bewußt verzichtet
und auf die einschlägige Fachliteratur verwiesen.
Zur Beschreibung der schaltungstechnischen Eigenschaften von Bauelementen werden praktisch
Gleichungen, Kennlinien und Ersatzschaltungen bzw. Netzwerke verwendet.
Grundlage der Beschreibung elektrischer Elemente ist ihr .OHPPHQYHUKDOWHQ (Ohmsches Gesetz).
Die entsprechenden U-I-Relationen können linear und nichtlinear sein. Man spricht deshalb auch
von linearen und nichtlinearen Bauelementen.
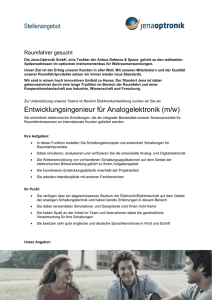
Widerstände, Kondensatoren, Induktivitäten (Spulen) werden als SDVVLYH Bauelemente klassifiziert.
Die Symbole als Bauelement und ideales Netzwerkelement sind identisch (Tafel 1). Dagegen
werden Transistoren oft auch als DNWLYH Bauelemente bezeichnet, obwohl sie eigentlich steuerbare
passive Widerstände sind. Ihr DNWLYHV Verhalten läßt sich grundsätzlich nur mit einer Schaltung
erzeugen, die an eine Energiequelle, typisch eine Gleichspannung, angeschlossen ist. Zu ihrer
Beschreibung werden Ersatz-Netzwerke mit mehreren Netzwerkelementen bzw. entsprechend
aufwendige Gleichungen benötigt.
Widerstand, allgemein
Fotowiderstand
Induktivität
Quarz
-
Kapazität
+
Batterie
Spannungsquelle, allgemein
Gleichspannungsquelle
Stromquelle
Masse, GND
A
K
Diode, allgemein
Universaldiode
A
K
Z-Diode
A
K
Leuchtdiode, LED
A
K
Schottky-Diode
npn-Transistor
B
B
C
C
C
B
E
A
C
K
E
pnp-Transistor
B
S
n-Kanal-FET
selbstsperrend
B
G
S
B
S
n-Kanal-FET
selbstleitend
D
D
G
Optokoppler
D
D
G
Schottky-Transistor
E
E
p-Kanal-FET
selbstsperrend
B
G
S
p-Kanal-FET
selbstleitend
Tafel 1: Schaltzeichen für Netzwerkelemente und elektronische Bauelemente
2
1. Elektronische Bauelemente
:LGHUVWlQGH
Widerstände sind passive Bauelemente, an denen ein Spannungsabfall UR entsteht, wenn sie von
einem Strom IR durchflossen werden (Ohmsches Gesetz).
^ 'HILQLWLRQVJOHLFKXQJ
UR = R . IR .
(1.1.1)
In der Wechselstromtechnik wird zusätzlich ein Scheinwiderstand (Wirk- und Blindwiderstand)
verwendet. Der Wirkanteil R wird als ohmscher Widerstand oder einfach Widerstand bezeichnet.
^ 6FKHLQZLGHUVWDQG
Z = R2 + X2
(1.1.2)
Die elektrische Energie W kann an einem Widerstand umgesetzt (Wirkwiderstand - Wärme) oder
gespeichert werden (Blindwiderstand X, vgl. Kapazität, Induktivität)
^ (OHNWULVFKH(QHUJLH
W = U. I. t
(1.1.3)
/LQHDUH:LGHUVWlQGH
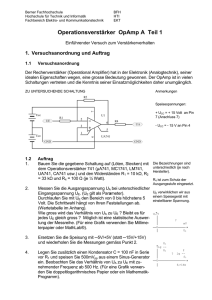
Die industrielle Elektronik schafft i.a. die Voraussetzungen dafür, daß ohmsche Widerstände als
lineare konzentrierte Bauelemente betrachtet werden können. Für sehr hohe Frequenzen trifft das
immer weniger zu, hier wird das Verhalten besser durch eine R-L-C-Ersatzschaltung beschrieben
(Bild 1.1.1). Für den komplexen Scheinwiderstand Z(p) gilt dann:
Z(p) = pL +
R
1 + pCR
mit p = j* = j . 2 . f .
(1.1.4)
Es kann eine Grenzfrequenz fg angeben werden, bis zu der ein ohmscher Widerstand als solcher
einsetzbar ist. Da mit steigender Frequenz f zuerst die parasitäre Parallelkapazität C wirksam wird,
sinkt oberhalb von fg der Scheinwiderstand von Z(p) zunächst ab, wächst dann infolge des
induktiven Anteils L und übersteigt schließlich den statischen Wert R (Bild 1.1.1).
|Z(p)|
L
UR
R
R
IR
C
}
Z(p)
R
lg f
fg
Bild 1.1.1: Ohmscher Widerstand, Ersatzschaltung für hohe Frequenzen
^ Lineare Widerstände werden als Draht- oder Schicht- bzw. Filmwiderstände hergestellt (vgl.
auch Tafel 1.1.4).
^ Sie werden nach Widerstandswerten und anderen Kenngrößen (Verlustleistung, ...) eingeteilt.
Widerstände der gleichen Bauform und mit gleicher Kennfarbe werden in einer %DXUHLKH
zusammengefaßt.
1. Elektronische Bauelemente
3
:LGHUVWDQGVZHUWHXQG.HQQ]HLFKQXQJ
Nach einer Empfehlung der Internationalen Kommission für Elektrotechnik IEC sind die
Nennwerte handelsüblicher Widerstände und Kondensatoren nach sogenannten (5HLKHQ gestuft
(Tafel 1.1.1).
Die Reihen werden nach der Anzahl der Nennwerte je Dekade bezeichnet. So enthält die Reihe E 6
genau n = 6 Nennwerte je Dekade (Spalte 1 in Tafel 1.1.1). Die Stufung innerhalb der Reihen
1
erfolgt nach geometrischen Folgen und entspricht etwa dem Faktor 10 E n .
Die Prozentangaben geben die relativen Toleranzen vom Nennwert an. Die Toleranzbereiche
zwischen benachbarten Werten überlappen sich teilweise.
Wert
1
2
3
4
5
6
7
8
Reihe
Spalten
Toleranz
1,00
1,05
1,10
1,15
1,20
1,25
1,30
1,40
E 6
1
± 20 %
1,50
1,55
1,60
1,70
1,80
1,90
2,00
2,10
E 12
1, 5
± 10 %
2,20
2,30
2,40
2,55
2,70
2,85
3,00
3,15
E 24
3,30
3,45
3,60
3,75
3,90
4,10
4,30
4,50
E 48
4,70
4,90
5,10
5,35
5,60
5,90
6,20
6,50
E 96
6,80
7,15
7,50
7,85
8,20
8,60
9,10
9,55
1, 3, 5, 7 ± 5 %
1-8
± 2%
± 1%
Tafel 1.1.1: Widerstandswerte der internationalen E-Reihen
Die Kennzeichnung der Widerstandswerte am Bauelement Widerstand erfolgt durch Aufdruck
eines Buchstaben-Zahlenkodes oder eine Farbkodierung (Farbringe oder Farbpunkte). Der
Nennwert des Widerstandes wird dabei immer in Ohm angegeben.
Tafel 1.1.2 gibt die verwendeten Symbole des Buchstaben-Zahlenkodes an und zeigt Beispiele zur
Kennzeichnung von Widerständen. Der Kennbuchstabe für die Grundeinheit wird gleichzeitig als
Komma genutzt.
Nennwert
Buchstabe
Toleranz
in %
Buchstabe
Beispiel
Aufdruck
Bedeutung
Ohm
R
20
ohne
2R2
2,2 (1 ± 20 %)
Ω
Kiloohm
K
10
K
3k3 K
3,3 (1 ± 10 %)
kΩ
Megaohm
M
5
J
2M2 J
2,2 (1 ± 5 %)
MΩ
Gigaohm
Teraohm
G
T
2
1
G
F
Tafel 1.1.2: Zur Kennzeichnung der Widerstandswerte durch Buchstaben-Zahlenkode
Bei Verwendung der internationalen Farbreihe wird der Widerstandskörper mit meist 4 Farbringen
gekennzeichnet (Tafel 1.1.3).
^ Die ersten beiden Ringe kodieren die zwei Ziffern des Widerstands-Nennwertes. Der erste
Farbring liegt einem Anschluß am nächsten.
^ Der dritte Ring kodiert den Multiplikator und der vierte Ring die Toleranz vom Nennwert.
4
1. Elektronische Bauelemente
Farbe
1. Ring
1. Zahlenwert
2. Ring
2. Zahlenwert
3. Ring
Multiplikator
4. Ring
Toleranz in %
ohne
-
-
-
20
silber
-
-
10-2
-
-1
5
0
gold
-
10
10
schwarz
-
0
10
-
braun
1
1
101
1
2
2
2
3
-
4
-
5
0,5
6
0,25
7
rot
2
orange
3
gelb
3
4
grün
10
4
5
blau
10
10
5
6
10
6
10
violett
7
7
10
0,1
grau
8
8
108
0,05
9
9
weiß
9
10
-
Tafel 1.1.3: Internationaler Farbkode zur Kennzeichnung von Widerständen
=XOlVVLJH9HUOXVWOHLVWXQJ7HPSHUDWXUNRHIIL]LHQW
Die Nenn(verlust)leistung PN ist die bis zu einer bestimmten Nenntemperatur a = N zulässige
Leistung, die an einem Widerstand in Wärme umgesetzt wird. Erfolgt der Einsatz bei höheren
Temperaturen bis zu max , so muß die Verlustleistung auf den zulässigen Wert PZ reduziert werden
(Bild 1.1.2).
zulässige Verlustleistung
PZ
PN
PN
für a > N
PZ =
max − a P N für a P N
max − N
1
0,5
0
ϑN
ϑ max
Bild 1.1.2: Zulässige Verlustleistung für Widerstände
ϑa
(1.1.5)
1. Elektronische Bauelemente
5
7HPSHUDWXUNRHIIL]LHQW7.
Bei einer Temperaturänderung ändert sich auch der Widerstandswert. Als Maß dafür dient der
Temperaturkoeffizient TK. Er ist materialabhängig und gibt die auf den Nennwert bei a = 20°C
bezogene Änderung R des Widerstandswertes für 1 Grad Temperaturänderung an.
TKR = RR
. T
R = R 20 (1 + TK R . T ) ,
(1.1.6)
Bei Reihen- bzw. Parallelschaltung von zwei Widerständen gilt für den resultierenden TKR
^ Reihenschaltung
TKR =
R 1 TK R1 + R 2 TK R2
R1 + R2
mit R = R1 + R2
^ Parallelschaltung
TKR =
R 1 TK R2 + R 2 TK R1
R1 + R2
mit R = R 1+ R2
1
2
R .R
(1.1.6 a)
(1.1.6 b)
Einen Überblick über Temperaturkoeffizienten und deren Stabilität für verschiedene Widerstände
und Widerstandsverhältnisse zeigt Tafel 1.1.4.
TK für Einzelwiderstand
Widerstandsverhältnisse
absolut
typische Drift
pro Jahr
TK
typische Drift
pro Jahr
in ppm
in ppm
in ppm
in ppm
Laborgewickelte Drahtwiderstände
1
2-5
0,5
1-5
Industrielle Präzisionsdrahtwiderstände
2
15 - 50
1-2
10 -30
Filmwiderstände
3
25
1,5
15 - 40
Gedruckte
Spezial-Dünnfilmwiderstände
5 - 15
25 - 50
3-5
25 - 50
Dünnfilmwiderstände
20 - 60
200 - 400
2-6
100 - 400
Laserabgeglichene
20 - 60
200 - 600
3 - 10
200 - 600
50 - 100
500 - 1000
5 - 50
200 - 2000
50 - 100
500 - 1000
5 - 50
200 - 2000
1000 - 2000
20 000
500 - 1000
20 000
Widerstandsart
Kleinstdünnfilmwiderstände
Diskrete Dünnfilmwiderstände
(RN55E)
Abgeglichene Dünnfilmwiderstandsnetzwerke
Kohleschichtwiderstände
Tafel 1.1.4: Stabilität von Widerständen im Vergleich
6
1. Elektronische Bauelemente
(LQVWHOOEDUH:LGHUVWlQGH6SDQQXQJVWHLOHU
Veränderbare Widerstände werden als Dreh- oder Schiebewiderstände hergestellt. In der Praxis
werden Schiebewiderstände nur für Laboraufbauten eingesetzt.
^ Spannungsteilung :
U2
=
U1
^ Schleiferbelastung :
Imax =
^ Innenwiderstand
Rx
R
1 + (1 − x) X
RL
R
mit x = R x
max
(1.1.7)
Pz
R max
(1.1.8)
Ri ers = Rx (1 - x )
R max
U1
x
(1.1.9)
Rmax - R x
U2
R
L
U1
Rx
U2
RL
Bild 1.1.3: Spannungsteiler mit einstellbarem Widerstand
)RWRZLGHUVWlQGH
Fotowiderstände sind Halbleiter-Bauelemente ohne ausgeprägte Sperrschicht, d.h. sie bestehen aus
einem homogenen dotierten Halbleitermaterial (CdS, CdSe, PbS, Si). Dazu wird das HalbleiterMaterial als dünne Schicht im Inneren eines Glaskolbens aufgetragen und eingeschmolzen. Wegen
der homogenen Verteilung der HL-Elemente im Kristall ist der Widerstandswert in weiten Grenzen
sowohl von der angelegten Spannung als auch von ihrer Polarität unabhängig (gute Linearität).
Bei Beleuchtung erhöhen die auftreffenden Photonen die Beweglichkeit der Elektronen und der
Widerstand ändert sich von seinem 'XQNHOZHUW RD auf seinen +HOOZHUW RH um mehrere Dekaden.
Da die Elektronen den Kristall nicht verlassen (sogenannter innerer fotoelektrischer Effekt), haben
Fotowiderstände eine hohe spektrale Empfindlichkeit ( = 400 nm ... 1 200 nm).
Für den Widerstandswert gilt R x = R o E − c mit c = 0,5 ... 1,0.
^ Der Widerstandswert Rx ist abhängig von dem auf eine Beleuchtungsstärke von 1 lx
bezogenen Widerstand Ro , von der Beleuchtungsstärke E sowie einer Materialkonstanten c.
Fotowiderstände auf Cadmiumsulfid-Basis (CdS) haben ihre höchste Empfindlichkeit im Bereich
des sichtbaren Lichts ( O500 nm), ihr Dunkelwiderstand beträgt etwa R D O (10 6 ... 10 8 ) und der
Hellwiderstand liegt bei R H O 1 k .
^ Fotowiderstände sind träge Bauelemente, die Anstiegs- und Abfallzeiten liegen typisch im
Bereich von einigen 10 ms ... > 100 ms.
1. Elektronische Bauelemente
7
1LFKWOLQHDUH:LGHUVWlQGH
9DULVWRUHQ
Varistoren sind spannungsabhängige Halbleiter-Widerstände, deren Kennwerte wesentlich durch
die geometrischen Abmessungen (Formkonstante C) und den verwendeten Werkstoff (Konstante )
bestimmt werden. Die Eigenschaft, daß der differentielle Widerstand bei steigender Spannung
sinkt, wird in technischen Anwendungen zur Signalbegrenzung, Stabilisierung, zur niederohmigen
Signalteilung bzw. zum Überspannungsschutz genutzt (Bild 1.1.4).
^
Widerstand
R = C . I (−1)
(1.1.10)
^
Spannung
U = C.I (1.1.11)
^
Leistung
P = C . I (+1)
(1.1.12)
C - Formkonstante (Spannungsabfall bei I = 1 A)
- Materialkonstante (Zinkoxid ca. 0,05, Si-Carbid 0,15...0,25)
^ differentieller Widertstand
U
r
−1
r 0 = d U (I 0 ) = C . . I 0 , 0 = R0
dI
I
C = 270
C = 100
I
R
Uo
I
Io
U 1+ ∆U1
U2+ ∆ U2
U1+ ∆ U1
R
U2+ ∆ U2
niederohmige Signalteilung
Signalbegrenzung
typische Kennlinie
für f < 1 kHz
(1.1.13)
∆ U 2 => 0 für |U1| > U1min
∆ U2 => ∆ U1 für |U1| > U 1min
Bild 1.1.4: Kennlinie und Grundschaltungen für Varistoren
+HLOHLWHU17&:LGHUVWlQGH7KHUPLVWRUHQ
Heißleiter sind nichtlineare Halbleiter-Widerstände mit negativem Temperaturkoeffizienten (NTC).
Sie werden z. B. als Meßfühler, Anlaßheißleiter und zur Temperaturgangkompensation eingesetzt.
Die Eigenzeitkonstante liegt im Sekundenbereich.
Wird bei anliegender Spannung die Grenzleistung Pg überschritten, heizt sich der Thermistor
zunehmend selbst auf (signalabhängiger Widerstand).
−b
^ Widerstand
^ Eigenerwärmung
RT = R0 e
T = Rth P
^ Grenzleistung mit
vernachlässigbarer Eigenerwärmung
Pg = Ug . Ig
1 −1
T0 T
(1.1.14)
(1.1.15)
(1.1.16)
R0 - Bezugswiderstand bei T0 (meist 25°C), b - Energiekonstante, Herstellerangabe.
8
1. Elektronische Bauelemente
.RQGHQVDWRUHQ
Ein Kondensator ist ein Bauelement, das elektrische Ladungen aufnehmen und speichern kann.
Diese Eigenschaft heißt .DSD]LWlW des Kondensators. Die Ladungsspeicherung bewirkt eine
Energiespeicherung. Die elektrische Energie wird im elektrischen Feld gespeichert, welches sich im
Dielektrikum ausbildet.
^ Kondensatoren sind die wichtigsten energiespeichernden Bauelemente in der elektronischen
Schaltungstechnik. Die besseren elektrischen Eigenschaften und die wesentlich günstigere
technologische Fertigung führen zu einem klar bevorzugten Einsatz gegenüber Induktivitäten
(Spulen). Das gilt erst recht für die integrierte Schaltungstechnik.
Kondensatoren werden als Bauelemente gezielt in Schaltungen eingesetzt, sie können aber auch als
parasitäre Elemente auftreten. So zeigen z. B. pn-Übergänge in Halbleiterelementen und parallele
Leitungen kapazitive Erscheinungen. Sie machen sich z. B. in einer 9HU]|JHUXQJ von Schaltflanken
bzw. durch hEHUVSUHFKHQ auf benachbarte Leitungen störend bemerkbar.
Kondensatoren werden als Bauelemente in sehr unterschiedlichen Bauformen (Plattenkondensator,
Zylinderkondensator, ...) realisiert. Ihre Kapazitätswerte hängen in sehr starkem Maße vom
geometrischen Aufbau und den verwendeten Materialien für das Dielektrikum ab.
Beim Einsatz muß zwischen gepolten und ungepolten Kondensatoren unterschieden werden.
^ Bei ungepolten Kondensatoren sind die beiden Anschlüsse gleichwertig.
^ Gepolte Kondensatoren (z.B. Elektrolyt-Kondensatoren, kurz Elko) sind nur unter Beachtung
der Polarität der angeschalteten Spannung einsatzfähig. Anderenfalls kommt es zu einem
Abbau des Dielektrikums und damit zur Zerstörung des Kondensators.
Handelsübliche Kapazitätswerte sind entsprechend den E-Reihen gestuft (typisch E 6, E 12), die
Realisierung enger tolerierter Werte bereitet erhebliche technologische Probleme.
'HILQLWLRQVJOHLFKXQJHQ
d U C (t)
,
dt
Zeitbereich
i C (t) = C
Frequenzbereich
I C = L i C (t) = C
0
t
U C (t) = 1 i C (t) d t + U C (0) ,
C0
dU C − pt
e dt .
dt
(1.2.1)
(1.2.2)
Nach partieller Differentiation folgt in Operatorform IC (p) = C [ pUC (p) - UC (0) ]. Mit UC (0) ≡ 0
wird die komplexe Frequenz p = + j * zum +HDYLVLGH2SHUDWRU und es gilt einfacher
IC (p) = C . p . UC (p)
Z C (p) =
U C (p)
= 1.
I C (p)
p C
- Impedanz,
Y C (p) =
I C (p)
= 1 = p.C
Z C (p)
U C (p)
- Admittanz.
1. Elektronische Bauelemente
9
'LPHQVLRQLHUXQJVJOHLFKXQJHQ
Q
^ Kapazität, allgemein
[F = As
]
V
C= U
(1.2.4)
C = 0 r (n − 1) A
d
^ Plattenkondensator
(n - Anzahl der Platten, A - Fläche, d - Plattenabstand)
^ Zylinderkondensator
C = 2 0 r
l
ln r a − ln r i
(Rohrkondensator, Koaxialkabel)
ra - äußerer Radius
ri - innerer Radius
^ elektrische Feldkonstante
(Dielektrizitätskonstante)
.
0 = 8, 86 . 10 −12 A. s
V m
^ Dielektrizitätszahlen r
Vakuum
Luft
Glimmer
Hartpapier
^ gespeicherte Energie
W = C U C2
2
(1.2.5)
^ Temperaturkoeffizient
TK C = 1 . C
C T
(1.2.6)
1
1,0006
6 ... 8
5 ... 6
keramische Massen
NDK-Typen
10 ...
130
HDK-Typen 2000 ...10 000
In der industriellen Informationsverarbeitung bzw. Signalverarbeitung müssen die Kondensatoren
ein breites Frequenzspektrum (0 ... 100 MHz) verarbeiten. Es genügt deshalb meist nicht, die realen
Eigenschaften von Kondensatoren nur bei einer Frequenz zu beschreiben.
^ Insbesondere müssen auch sogenannte 5HOD[DWLRQHQ (dielektrische Nachwirkungen) beachtet
werden. Sie äußern sich in Form von Nach- und Umladeerscheinungen und bewirken ein
"Gedächtnis" des Kondensators. Die Nichtbeachtung kann in Präzisionsschaltungen (z.B.
S&H-Schaltungen bei der Analog-Digital-Wandlung) zu großen Fehlern führen.
5HLKHQXQG3DUDOOHOVFKDOWXQJYRQ.RQGHQVDWRUHQ
Bei der Zusammenschaltung von Kondensatoren ergeben sich die Kennwerte Gesamtkapazität,
Temperaturkoeffizient, Ladespannung und Ladung entsprechend der Ersatzschaltung grundsätzlich
aus den Kirchhoffschen Gleichungen. Nachfolgend sind die Ergebnisse für die Reihen- bzw.
Parallelschaltung von zwei Kondensatoren angegeben.
Reihenschaltung
Gesamtkapazität
Temperaturkoeffizient
C
.
C
Cges = C 1 + C2
1
2
TKges =
C 1 TK 2 + C 2 TK 1
C1 + C2
Parallelschaltung
Cges = C1 + C2
TKges =
C 1 TK 1 + C 2 TK 2
C1 + C2
Ladespannung
Uges = UC1 + UC2
Uges = UC1 = UC2
Ladung
Qges = QC1 = QC2
Qges = QC1 + QC2
10
1. Elektronische Bauelemente
,QGXNWLYLWlWHQhEHUWUDJHU5HODLV
Induktivitäten werden selten zur Signalformung bzw. -übertragung verwendet. In der industriellen
Elektronik sind sie überwiegend in Transformatoren (Übertrager) und Relais eingesetzt. Die
Möglichkeit der potentialfreien bzw. galvanisch getrennten Signalübertragung mit Übertragern wird
zunehmend durch optoelektronische Kopplung realisiert.
^ Parasitär tritt die Induktivität jedoch in Form der /HLWXQJVLQGXNWLYLWlW immer auf und muß als
solche ggf. entsprechend beachtet werden.
'HILQLWLRQVJOHLFKXQJHQ
d i L (t)
dt
^ Zeitbereich
U L (t) = L
^ Frequenzbereich
UL (p) = L . [ p. IL(p) - iL(0) ]
Mit iL (p) ≡ 0 gilt
(1.3.1)
(1.3.2)
UL (p) = L . p. IL(p),
Z L (p) =
U L (p)
= p.L
I L (p)
- Impedanz,
Y L (p) =
1 = 1
Z L (p) p . L
- Admittanz.
/HLWXQJVLQGXNWLYLWlW
Die wichtigste Eigenschaft der Leitungsinduktivität ist der /DXI]HLWHIIHNW und die damit verbundene
5HIOHNWLRQeinerWelle bei Fehlanpassung. In der Folge können Signalverzerrungen auf der Leitung
entstehen, die schaltungstechnisch nur schlecht zu korrigieren sind. Sie müssen deshalb mit Hilfe
der /HLWXQJVDQSDVVXQJ weitgehend vermieden werden. Als allgemeine Anpaßbedingung gilt:
^ Der Abschlußwiderstand Za (p) der Leitung muß gleich ihrem komplexen Wellenwiderstand
ZW (p) sein (vgl. Abschnitt 11).
5HODLV
Ein Relais ist meist ein elektromechanisches Bauelement zur Ausführung einer 6FKDOWIXQNWLRQ. Die
Schaltfunktion wird durch Öffner, Schließer und/oder Umschalter realisiert. Die Steuergröße ist
eine elektrische Leistung, die unterschiedlich umgesetzt wird. Abhängig von dieser Umsetzung
werden elektronische, elektromagnetische, thermische, elektrostatische und elektrodynamische
Relais unterschieden. Weit verbreitet ist das elektromagnetische Relais, bei dem ein Elektromagnet
bei Stromerregung einen Anker anzieht, der seinerseits die Kontakte betätigt.
Wichtige statische Kenngrößen von Relais sind Anzugsstrom IA , Haltestrom IH , Abfallstrom IR und
Fehlstrom IF . Sie müssen durch geeignete Ansteuerschaltungen erzeugt werden. Dazu kommen die
dynamischen Kennwerte in Form der Schaltzeiten und Verzögerungszeiten. Alle Kennwerte sind
stark von technologischen Parametern und dem Aufbau bestimmt.
Beim Einsatz von Relais in elektronischen Schaltungen ist neben der Einhaltung seiner Kennwerte
(Anzugsstrom, Haltestrom, Fehlstrom, ...) das Auftreten einer großen $EVFKDOWVSDQQXQJ zu
beachten, die ggf. eine Begrenzerschaltung erforderlich macht. Meist wird dazu das Prinzip der
)UHLODXIGLRGH angewendet (vgl. Abschnitt 2).
1. Elektronische Bauelemente
11
+DOEOHLWHUGLRGHQ
Halbleiter-Dioden entstehen technologisch durch Diffusion von p- und n-dotierten Bereichen
(pn-Übergang) oder durch einen Metall-Halbleiterübergang (SB, Schottky-Barriere).
Ausgangsmaterial ist heute meist Silicium, für sehr schnelle Dioden wird zunehmend dotiertes
GaAs verwendet (ca. 6 x höhere Ladungsträgerbeweglichkeit als bei Silicium).
8QLYHUVDOXQG6FKDOWGLRGHQ
6WDWLVFKHV9HUKDOWHQ
Die I-U-Kennlinie einer Halbleiter-Diode (Bild 1.4.1) läßt sich in guter Näherung durch einen
exponentiellen Verlauf beschreiben:
UD
ID = IS ( e U T − 1).
(1.4.1)
Dabei bedeuten:
.
Temperaturspannung UT = kqT O 26 mV (bei Raumtemperatur),
Sättigungsstrom
I S = (0,1 ...10) nA - technologieabhängiger Kennwert.
ID
U
F
IF
IF
U
B
A K
20 mA
R
A - Anode
K - Katode
UR
1V
5V
U BR
U
100 µA
UD
S
UF
IR
Bild 1.4.1: I-U-Kennlinie einer Halbleiter-Diode
,GHDOLVLHUWH'LRGH
Zur Vereinfachung der Schaltungsberechnung wird der exponentielle Verlauf der I-U-Kennlinie
realer Halbleiter-Dioden meist durch eine idealisierte .QLFNNHQQOLQLH beschrieben (Bild 1.4.2). Es
sind unterschiedliche Approximationen und Ersatzschaltungen gebräuchlich. Man spricht dann
auch von einer idealisierten Diode. Das Verhalten wird oft vereinfacht mit Gl. (1.4.2) beschrieben
0 für U D < U S
ID =
.
IF für U D P U S
(1.4.2)
^ Praktisch fließt ein nennenswerter Strom ID = IF erst für eine Diodenspannung UD P US .
12
1. Elektronische Bauelemente
UD
ID
K
A
ID
RF
RF = 0
ID
A
RF
US
UZ
UZ
K
US
RS
+ -
UD
RS
US
UD
RZ = 0
RZ
RS
∞
Statische Ersatzschaltung
gebräuchliche Approximationen der Kennlinie
Bild 1.4.2: Statische Ersatzschaltung und idealisierte Diodenkennlinien
Da der Durchlaßwiderstand RF bei leitender Diode sehr klein ist (RF = 1 Ω ... 20 Ω bei Universalund Schaltdioden, RZ = 7 Ω ... 20 Ω bei Z-Dioden) wird praktisch vereinfacht mit konstanter
Flußspannung UF = US = konst. gerechnet. Das ist für US >> ID . RF meist hinreichend erfüllt.
^ Beim praktischen Einsatz muß immer ein Begrenzungswiderstand R für den Diodenstrom ID
im Stromkreis vorgesehen werden, damit die maximal zulässige Verlustleistung Ptot der
P
Diode nicht überschritten wird (I F > Utot ).
F
Bild 1.4.3 zeigt die Zeitverläufe in einer einfachen Schaltung mit idealisierter Diode. Durch die
9HQWLOZLUNXQJ der Diode werden nur die positiven Anteile der Spannung U1 (t) übertragen, während
bei negativer Spannung die Diode gesperrt ist (ID = 0). Bei umgekehrter Polung der Diode werden
entsprechend nur die negativen Teile der Spannung U1 (t) übertragen, während die Diode nun für
positive Spannungen U1 (t) gesperrt ist.
^ Diese Eigenschaft der Halbleiter-Diode wird u.a. in *OHLFKULFKWHUVFKDOWXQJHQ und in
ORJLVFKHQ6FKDOWXQJHQ genutzt.
UF
U1
U1
IF
RL
U1max
t
UA
UA
U 1max- U F = I F RL
t
0
für U D < U S
ID =
.
U 1 − U S für U D P U S
RL
Bild 1.4.3: Gleichrichterwirkung einer idealisierten Diode
1. Elektronische Bauelemente
13
6WDWLVFKH.HQQZHUWH
Für HL-Dioden werden wie bei allen Halbleiter-Bauelementen eine ganze Anzahl von Kenn- und
Grenzwerten verwendet, die wichtigsten sind nachfolgend im Überblick angegeben.
UD
UF
US
UR
UBR
ID
IF
IR
IFSM
Diodenspannung, allgemein,
Flußspannung bei leitender Diode,
Schleusenspannung,
Sperrspannung,
Durchbruchspannung (wird als Kennwert nicht angegeben),
Diodenstrom, allgemein,
Flußstrom bei leitender Diode,
Sperrstrom,
maximaler Stoßstrom.
Wegen der nichtlinearen Kennlinie sind die Dioden-Kenngrößen DUEHLWVSXQNWDEKlQJLJ. Bei vielen
Anwendungen, insbesondere beim Einsatz in digitalen Schaltungen, kann aber vereinfacht mit dem
Modell einer idealisierten Diode gearbeitet werden.
Typische Wertebereiche für die Kennwerte sind:
Flußwiderstand
Sperrwiderstand
RF = RON = (1 ... 20) Ω
RS = ROFF = (0,1 ..10) M Ω
Schleusenspannung
US = (0,6 ... 0,8 ) V
US = (0,3 ... 0,45) V
für PN-Typen
für SB-Typen
Durchbruchspannung
UBR = -5 V ... -180 V für Universal- und Schaltdioden
(angegeben wird meist nur ein Wert UR max für den sicheren Betrieb der Diode)
UZ = (5 ... 24) V
zulässiger Temperaturbereich
für Z-Dioden
- 55 °C < T < 150 °C (typisch)
^ Sperrwiderstand RS, Schleusenspannung US und Durchbruchspannung UBr (UZ bei Z-Dioden)
sind temperaturabhängige Kennwerte. Das wird durch ihren Temperaturkoeffizienten TK
ausgedrückt
TK (US ) = (2 ... 2,2) mV/K,
100%
I S (T 0 )
TK ( I S )
.
= (8 ... 14)% G I S (T ) O (2 ... 3) .
IS
8K
^ Beim Einsatz von Schaltdioden in logischen Schaltungen reicht für die Analyse meist die
Berücksichtigung der Schleusenspannung US und/oder der Durchbruchspannung UBr (UZ )
aus.
^ Bei 9HUNQSIXQJVVFKDOWXQJHQ mit einer großen Anzahl von Dioden (viele Eingänge) muß
ggf. der wirksame Reststrom infolge dieser Temperaturabhängigkeit beachtet werden.
14
1. Elektronische Bauelemente
'\QDPLVFKH.HQQZHUWH
Das Impulsverhalten realer Dioden wird wie bei allen Halbleiter-Bauelementen sehr stark vom
technologischen Aufbau und der äußeren Schaltung (Schaltspannung, -ströme, äußere Widerstände)
bestimmt.
^ Die wichtigsten dynamischen Kenngrößen von HL-Dioden sind die 'LIIXVLRQVNDSD]LWlW CD
und die 6SHUUVFKLFKNDSD]LWlW CS (vgl. Bild 1.4.4).
^ Weitere Einflußfaktoren sind Gehäusekapazität, Leitungsinduktivität und Bahnwiderstände.
Die 6SHUUVFKLFKWNDSD]LWlW CS ist spannungsabhängig und wirkt sowohl bei leitender als auch bei
gesperrter Diode. Die 'LIIXVLRQVNDSD]LWlW CD ist nur bei leitender Diode wirksam. Sie repräsentiert
im wesentlichen die Änderung der Minoritätsträgerladung bei Änderung der Flußspannung UF
CD =
Q Min
.
UF
(1.4.3)
Bei leitender Diode wird die wirksame Kapazität (CD + CS ) und die davon abhängige Zeitkonstante
durch den parallelliegendenen niederohmigen Flußwiderstand RF sehr stark in ihrer Auswirkung
reduziert.
UF
U1
IF
U
t
U(t)
RL
U2
IF
ID
tr
CD
UF
RF
IF
UD
RS
RL
U(t)
t
IS
IR
tS
U =U
1 FS
US
tf
CS
t
U 2= U
R
tE
Bild 1.4.4: Dynamische Ersatzschaltung und Impulsverhalten von Halbleiter-Dioden
(LQVFKDOWYRUJDQJ
Beim Einschalten muß sich zuerst eine 5DXPODGXQJV]RQH am pn-Übergang aufbauen, dabei ist
zunächst noch der Sperrwiderstand RS der Diode wirksam. Kurzzeitig entsteht eine hohe DiodenR
Flußspannung U FS = R +SR U 1 O U 1 . Der ansteigende Strom ID erzeugt die Raumladung und die
S
L
Diodenspannung sinkt auf den stationären Wert US ab.
^ Die Anstiegszeit tr beim Einschalten ist klein und kann gegenüber anderen Schaltzeiten meist
vernachlässigt werden.
1. Elektronische Bauelemente
15
$XVVFKDOWYRUJDQJ
Beim Ausschalten fließt infolge der hohen Anzahl von Ladungsträgern im %DKQJHELHW zunächst ein
relativ großer $XVUlXPVWURP IRS (Speicherzeit tS). Die Diode bleibt leitend (es fließt ein Strom),
obwohl das Steuersignal bereits umgeschaltet hat. Erst wenn die innere Sperrschichtspannung auf
Werte USS < 0 abgesunken ist, wird die Sperrschichtkapazität CS über RL spürbar entladen. Beim
Abschalten tritt so neben der Abfallzeit tf infolge der Speicherwirkung der parasitären Kapazitäten,
insbesondere der Sperrschichtkapazität CS , eine zusätzliche6SHUUYHU]|JHUXQJ auf.
I
^ Für die Speicherzeit tS gilt t S = $ 0 ln ( 1 + I F ) , typisch ( ns ... s ) .
R
^ Für die Abfallzeit tf gilt näherungsweise t f O 2, 2 . R L . C S .
^ Meist geben die Hersteller als dynamischen Kennwert eine sogenannte Erholzeit tE = tS + tf
anstelle einer Sperrverzögerungszeit an.
Diese Aussagen über das dynamische Verhalten gelten prinzipiell für alle Halbleiter-Bauelemente
mit pn-Übergängen, insbesondere auch für Bipolartransistoren (vgl. Abschnitt 1.5.3).
='LRGHQ
Z-Dioden werden in der industriellen Elektronik vorwiegend zur 5HIHUHQ]VSDQQXQJVHU]HXJXQJ und
in 6WDELOLVLHUXQJVVFKDOWXQJHQ angewendet.
^ Z-Dioden sind Halbleiter-Dioden mit einem ausgeprägtem Durchbruchverhalten (Avalanche-,
Lawineneffekt), wenn die Diode in 6SHUULFKWXQJ betrieben wird.
Für die VWDWLVFKHQ Kennwerte von Z-Dioden gelten im Prinzip die gleichen Aussagen wie bei den
Universaldioden. Insbesondere muß im Betrieb stets ein minimaler Z-Strom IZ min gewährleistet
werden, damit ein Stabilisierungseffekt erreicht wird (steiler Kennlinienbereich).
Die G\QDPLVFKHQ Kennwerte von Z-Dioden sind wesentlich schlechter als die von Universal- und
Schaltdioden. Sie werden deshalb im Schalterbetrieb nur in langsamen logischen Schaltungen
(LSL) als sogenannte +XEGLRGHQ eingesetzt (Erhöhung der Umschaltpegel und damit Vergrößerung
des statischen Störabstandes, vgl. auch Abschnitt 4).
.HQQOLQLHXQG.HQQZHUWH
Die I-U-Kennlinie einer Z-Diode ist in Bild 1.4.5 gezeigt. Zur vereinfachten Berechnung wird auch
bei Z-Dioden von der Linearisierung der Kennlinie Gebrauch gemacht.
Zur Schaltungsdimensionierung werden typisch folgende Kennwerte von Z-Dioden verwendet:
UZ
U
rZ = I Z
Z
Ptot
P
IZmax = Utot
Z
IZmin O 0,1 . IZmax
U
Z
TK(UZ ) = U . T
Z
- Z-Spannung (Nennwert)
- Z-Widerstand
- zulässige Verlustleistung
- max. zulässiger Z-Strom
- minimaler Z-Strom (Durchbruchbereich)
- Temperaturkoeffizient der Z-Spannung
16
1. Elektronische Bauelemente
I
ID
D
5V
UZ
UZ
UD
RS
∞
US
UD
I Z min
RZ
RZ = 0
P tot
a) real
b) idealisiert
Bild 1.4.5: I-U-Kennlinie einer Z-Diode
$QZHQGXQJVVFKDOWXQJHQPLW='LRGH
Die Grundstruktur einer Stabilisierungsschaltung mit Z-Diode zeigt Bild 1.4.6 a); sie eignet sich
u.a. zur Erzeugung einer 5HIHUHQ]VSDQQXQJ bei kleinen und konstanten Lastströmen.
Bild 1.4.6 b) zeigt eine Schaltung zur 3HJHOYHUVFKLHEXQJ mit Z-Diode; bei leitender Z-Diode gilt
hier UA = UI - UZ .
Für die Bemessung der Stabilisierungsschaltung lassen sich allgemeine Forderungen ableiten:
Eingangsspannung
UI ± UI P (1,8...2)UZ ,
Vorwiderstand
RV min < RV < RV max
mit
RV min =
(1.4.4)
U I + U I − U Z
U − U − U
, RV max = II + II Z ,
I L min + I Z max
L max
Z min
I Z max >
P tot
,
UZ
U
U
R
U
Stabilisierungsfaktor S = U I . UZ = 1 + RV . UZ .
I
Z
I
Z
Rv
UI
IL
I
Z
U
Z
IZ
RL
a) Stabilisierungsschaltung
Bild 1.4.6: Grundschaltungen mit Z-Diode
(1.4.5)
UZ
R
UI
UA
b) Pegelverschiebung
1. Elektronische Bauelemente
17
%LSRODUWUDQVLVWRUHQ
Bipolartransistoren sind Halbleiterbauelemente mit 2 Sperrschichten, deren Zonenfolge den Typ
festlegt (npn, pnp). Die 3 Zonen heißen (PLWWHU (E), %DVLV (B) und .ROOHNWRU (C). Sie sind mit
Anschlüssen versehen und somit dem Anwender zugänglich (Bild 1.5.1, Schaltsymbol).
^ Bipolartransistoren benötigen für ihre Funktion Ladungsträger beider Polaritäten (Majoritätsund Minoritätsträger), als Halbleitermaterial dient heute meist Silicium. Sie finden eine breite
technische Anwendung und werden allgemein einfach Transistoren genannt.
Transistoren werden oft auch als "aktive" Bauelemente bezeichnet, obwohl sie eigentlich nur
steuerbare passive Elemente sind. Ein sogenanntes "aktives" Verhalten läßt sich grundsätzlich nur
mit Hilfe einer Schaltung erzeugen, die an mindestens eine oder mehrere Energiequellen, typisch
Gleichspannungen, angeschlossen wird (Arbeitspunkteinstellung).
6WDWLVFKH(LJHQVFKDIWHQ(UVDW]VFKDOWXQJHQXQG.HQQZHUWH
Die Strom-Spannungsrelationen (statische Eigenschaften und Kennwerte) am Transistor sind stark
nichtlinear und werden anschaulich durch Kennlinienfelder (Bild 1.5.1) und/oder Ersatzschaltungen
(vgl. Bilder 1.5.2, 1.5.3) beschrieben. Aus den Kennliniengleichungen ist u.a. auch die starke
Temperaturabhängigkeit (UT -Temperaturspannung) der Transistorkenngrößen erkennbar:
^ IC und IB steigen, UBE sinkt mit steigender Temperatur.
Typ
Symbol
Eingangskennlinie
C
I
npn
B
B
UCE
UBE
E IE
US
C
UBE
-I
- IB
-I
C
- IB
pnp
IC
IB
IC
Ausgangskennlinienfeld
B
- UBE
- UCE
E - IE
- US
Bild 1.5.1: Kennlinien von Bipolartransistoren
- UBE
C
100
80
IB
40
20
10 µA
1
UCE
100
80
- IB
40
20
10 µA
1
- U CE
18
1. Elektronische Bauelemente
Im Ausgangskennlinienfeld IC = f {UCE ; IB } können mehrere Bereiche unterschieden werden, von
denen aber nur drei Bereiche technisch genutzt werden (Tafel 1.5.1). Dabei dürfen die zulässigen
Grenzwerte (UBE max , UCB max , UCE max, IC max, IB max , Ptot , ) nicht überschritten werden.
Emitterdiode
Kollektordiode
Arbeitsbereich
Anwendung
1
gesperrt
gesperrt
Sperrbereich
Schalter (OFF)
2
leitend
gesperrt
aktiv normal
Verstärker
3
gesperrt
leitend
aktiv invers
-
4
leitend
leitend
Sättigungsbereich,
Übersteuerung
Schalter (ON)
Tafel 1.5.1: Arbeitsbereiche von Transistoren
(UVDW]VFKDOWXQJ
Das statische Großsignalverhalten von Bipolartransistoren wird häufig mit Hilfe des Ebers-MollErsatzschaltbildes nach Bild 1.5.2 beschrieben.
A I I’C
IE
AN I’E
I’E
B’
E
UEB
UB’E
IB
B
UB’C
r BB’
I’C
für pnp-Typen sind
- die Dioden umzupolen
- alle Ströme und Spannungen
in ihrer Richtung umzukehren
IC
C
UCB
B
Bild 1.5.2: Statisches Ersatzschaltbild für npn-Bipolartransistoren nach EBERS-MOLL
Die Kennliniengleichungen für den inneren Transistor ergeben sich nach dem Knotensatz zu
IC = AN I’E - I’C , IE = I'E - AI I'C
IB = IE - IC ,
(1.5.1)
mit den Diodenströmen
U
U
I'C = ICS (exp UB C − 1) und I'E = IES (exp UB E − 1).
T
T
^ ICS , IES sind Sättigungsströme, deren Werte technologieabhängig sind (vgl. auch Diode).
Es folgt:
−U
IC = AN IE - I'C (1-AN AI ) = AN IE - ICB0 (exp UCB − 1)
T
mit
ICB0 = ICS (1-AN AI ) , Kollektorreststrom für IE = 0.
(1.5.2)
1. Elektronische Bauelemente
A
19
B
N
N
Wegen B N = 1 − A
bzw. A N =
folgt für den Kollektorstrom IC
1 + BN
N
−U
IC = BN IB - ICB0 (1+BN ) ( exp UCB − 1) .
T
(1.5.3)
^ Für UCB’ >> UT folgt daraus für den Kollektorstrom einfacher IC = BN . IB + (1+BN ) . ICBO .
^ An der hEHUVWHXHUXQJVJUHQ]H (Index ü für die Kennwerte) gilt per Definition UCB’ := 0 bzw.
UCEü = UBEü und für IC folgt der einfache Ausdruck IC = BN . IB . Wegen der Steilheit der
Kennlinie der BE-Diode gilt auch UBEü O UBEx .
Zur näherungsweisen Berechnung des statischen Verhaltens von Transistoren im DNWLYHQ Bereich
(gesperrte Kollektor-Basis-Diode, UCB’ >> UT bei npn-Typen) genügen demnnach meist die drei
Kenngrößen IB (bzw. UBE ), BN und ICBO . Entsprechend vereinfacht sich auch die Ersatzschaltung für
diesen Arbeitsbereich (Bild 1.5.3).
C
C
IC
IB
r
IC
BB’
B
B
I
UBE
E
IB
+ U
S
IE
UBE
E
für Silicium:
E
US O (0,6...0,8) V,
IB rBB’ O (0,1 ... 5) mV
Bild 1.5.3: Vereinfachte Ersatzschaltungen für npn-Transistoren bei gesperrter Kollektordiode
6WURPYHUVWlUNXQJVJUXSSHQ
Die Stromverstärkung BN ist wie alle Transistorkennwerte stark exemplarabhängig und wird durch
eine grobe Sortierung nach 6WURPYHUVWlUNXQJVJUXSSHQ gekennzeichnet (Tafel 1.5.2).
^ Innerhalb der Gruppen muß exemplarabhängig mit großen Schwankungen im realisierten
Wert der Stromverstärkung B gerechnet werden.
Stromverstärkungsgruppe
a
b
c
d
e
f
Minimal-Wert Bmin
18
28
56
112
224
450
Maximal-Wert Bmax
35
71
140
280
560
1 120
Tafel 1.5.2: Stromverstärkungsgruppen von Bipolartransistoren
20
1. Elektronische Bauelemente
%LSRODUWUDQVLVWRULQ$QDORJVFKDOWXQJHQ9HUVWlUNHU
Eine analoge Transistorschaltung muß stets so dimensioniert werden, daß RKQH Signalaussteuerung
die Ruhegleichströme ICA und IBA fließen und die Gleichspannungen UCEA und UBEA am Transistor
anliegen. Man spricht auch von $UEHLWVSXQNWHLQVWHOOXQJ.
Das diesen Gleichgrößen überlagerte Wechsel-Signal bewirkt dann eine Aussteuerung um diesen
Arbeitspunkt. Bei OLQHDUHQ Schaltungen muß eine Aussteuerung des Transistors in den Sättigungsund in den Sperrbereich vermieden werden.
Zur Stabilisierung des Arbeitspunktes gegen Parameteränderungen (Temperatur, Betriebsspannung,
Exemplarstreuungen, ...) werden bevorzugt Schaltungen mit *HJHQNRSSOXQJHQ verwendet (RE in
Bild 1.5.4 - Stromgegenkopplung).
^ Zur gleichspannungsunabhängigen Anschaltung des Nutzsignals wird oft eine kapazitive
Einkopplung über Kondensatoren C gewählt (Wechselspannungsverstärkung). Damit ist bei
mehrstufigen Verstärkern die Arbeitspunkteinstellung der einzelnen Stufen unabhängig voneinander. Es können aber nur Wechselsignale übertragen werden.
^ Bei Gleichspannungsverstärkern dagegen beeinflussen sich die Arbeitspunktparameter der
Einzelstufen gegenseitig, die Bemessung der Schaltung ist i.a. schwieriger. Dafür können
sowohl Gleich- als auch Wechselsignale übertragen bzw. verstärkt werden.
+U CC
IC
RC
R1
C
e
RC
IB
C
a
U
CE
Iq
R
E
b)
R2
C
a
e
UCE
UBE
a)
R1
C
IB
+UCC
IC
RE
U
RE
Bild 1.5.4: Lineare Schaltungen zur Arbeitspunkteinstellung und -stabilisierung
a) Konstantstromeinspeisung über Vorwiderstand, b) Basisspannungsteiler
Allgemein gelten folgende Gleichungen für die Kenngrößen in den angegebenen Schaltungen
IC =
RC =
U CC − U CE − U RE
(Arbeitsgerade)
RC
U CC − U CEA − U REA
,
I CA
R1 =
U CC − U BEA − U REA
,
I BA + I q
(1.5.4)
R2 =
U BEA + U REA
Iq
(1.5.5)
Typische Werte sind: Iq = (1...10) . IBA, UREA > 1 V ( O 0,1. UCC ).
^ Die grafische Darstellung von Gl. (1.5.4) im Ausgangskennlinienfeld wird $UEHLWVJHUDGH
genannt. Der Arbeitspunkt ergibt sich dabei als Schnittpunkt dieser Arbeitsgeraden mit der
Ausgangskennlinie für den entsprechenden Basisgleichstrom IBA (Bild 1.5.5).
1. Elektronische Bauelemente
I
UCB = 0
C
21
I Bx
U
I Bü
I Cx
RC
I Cü
IB
AP
I
CA
I
B
P Cmax
Arbeitsgerade
I
I BA
CC
U
I
C
BE
U CE
I By
Cy
U
CEx
UCEü
UCEA
UCEy UCC
UCE
Bild 1.5.5: Arbeitspunktfestlegung im Ausgangskennlinienfeld
$UEHLWVSXQNWHLQVWHOOXQJXQGVWDELOLVLHUXQJ
Das Klemmenverhalten des Transistors in (PLWWHUVFKDOWXQJ (vgl. Bilder 1.5.4, 1.5.5) wird durch die
Ströme IB , IC und die Spannungen UBE , UCE beschrieben. Der Arbeitspunkt AP eines Transistors ist
durch die *OHLFKZHUWH dieser vier Größen festgelegt und liegt normalerweise im DNWLY QRUPDOHQ
Betriebsbereich (vgl. Tafel 1.5.1). Nur eine Größe (oft IC ) kann frei gewählt werden, die anderen
drei Werte sind dann über das Eingangs- und das Ausgangskennlinienfeld bzw. die entsprechenden
Gleichungen miteinander sowie über die Arbeitsgerade (Arbeitsgeradengleichung) mit der äußeren
Schaltung des Transistors verknüpft. Es gelten folgende allgemeine Beziehungen:
IB = f1 {UBE , UCE }
- Eingangskennlinienfeld,
IC = f2 {UCE , IB }
- Ausgangskennlinienfeld,
IC = f3 {UCE , RC }
- I-U-Kennlinie der äußeren Schaltung (Last).
(1.5.6)
Die Werte der Transistorgrößen, also auch die Arbeitspunktgrößen, ergeben sich als Schnittpunkt
der Ausgangskennlinie für den aktuellen Wert des Basisstromes IB mit der Arbeitsgeraden, da der
Kollektorstrom IC stets die beiden funktionellen Abhängigkeiten f2 und f3 gleichzeitig erfüllen muß
IC = f2 {UCE , IB } = f3 {UCE , RC }.
^ Der Arbeitspunkt einer Schaltung muß durch geeignete und entsprechend dimensionierte
Teilschaltungen realisiert und gegen Parameteränderungen stabilisiert werden.
Das 6WDELOLVLHUXQJVSULQ]LS läßt sich anschaulich im Ausgangskennlinienfeld erklären. Dazu werden
die Ausgangskennlinienfelder von zwei Transistoren mit unterschiedlicher Stromverstärkung B bei
gleicher Außenbeschaltung (Arbeitsgerade) verglichen (Bild 1.5.6). Grundsätzlich ergeben sich die
gleichen Aussagen für HLQ Exemplar eines Transistors bei unterschiedlicher Sperrschichttemperatur.
22
1. Elektronische Bauelemente
Ein Vergleich der beiden Darstellungen ergibt:
Wird IBA konstant gehalten, so ändert sich der AP (ICA , UCEA) im AKF erheblich, ggf. bis in den
Übersteuerungsbereich oder in den Sperrbereich.
Wird dagegen ICA konstant gehalten, so bleibt auch der AP im AKF weitgehend konstant. Nur der
Basisgleichstrom IBA ändert sich jetzt. Diese Änderungen sind allerdings um den Wert des
Stromverstärkungsfaktors B kleiner als bei Änderungen des Kollektorstromes. Gleichzeitig wird
somit eine thermische Überlastung des Transistors bei sehr kleinen Lasten vermieden.
^ Eine AP-Stabilisierung ist dann am wirksamsten, wenn dadurch der Kollektorgleichstrom ICA
im Arbeitspunkt konstant gehalten wird.
IC
IC
I CA2
140 µA
AP 1
I CA
I BA
IB
100 µA
140 µA
I BA
AP2
AP1
I CA1
100 µA
I
60 µA
B
20 µA
60 µA
20 µA
UCEA
UCC
UCE
a) Transistor mit Stromverstärkung B1
UCEA2 U
CEA1
UCC
UCE
b) Transistor mit erhöhter
Stromverstärkung B 2 > B 1
Bild 1.5.6: Zum Prinzip der AP-Stabilisierung in Transistorschaltungen
'ULIWYHUKDOWHQ
Außer den exemplarabhängigen Streuungen der Parameter kommt es auch zu zeit- und temperaturabhängigen Abweichungen der Kennwerte, was ebenfalls eine Verschiebung des Arbeitspunktes
bewirkt. Ist für eine Schaltung z.B. die Abhängigkeit IC = IC {IB, B, ICB0 } bekannt, so kann eine
kleine Änderung I C O dI C des Kollektorstromes über das totale Differential bestimmt werden:
I C O
I
I C
I C
U BE + C B +
I .
U BE
B
I CB0 CB0
(1.5.7)
^ Die typisch langsamen Änderungen U BE , B, I CB0 nennt man 'ULIWJU|HQ der Kennwerte.
Für die Temperaturdrift der BE-Spannung eines npn-Bipolartransistors wird z.B. angegeben:
U BE = − (2, 2 ... 2, 5) mV . T (vgl. auch Diodenkennwerte).
K
(1.5.8)
^ Das Ziel jeder AP-Stabilisierung besteht darin, die Auswirkungen der Driftgrößen auf den
Arbeitspunkt möglichst gering zu halten, z.B. die Driftverstärkung einer Verstärkerstufe im
Vergleich zur Signalverstärkung VDrift << VU .
1. Elektronische Bauelemente
23
Ein großer Unterschied im Einfluß der Driftgrößen auf den AP und letztlich auf die Ausgangsgröße
einer Schaltung besteht zwischen gleich- und wechselspannungsgekoppelten Schaltungen.
In ZHFKVHOVSDQQXQJVJHNRSSHOWHQ Schaltungen werden sehr langsame Änderungen typisch nicht
zwischen den einzelnen Stufen übertragen, solange die Signalfrequenz hoch genug ist (außerhalb
des Frequenzbereiches der Driftgrößen liegt) und die .RSSHONDSD]LWlWHQ entsprechend bemessen
sind. So kann die Forderung nach einer geringen Driftverstärkung meist relativ gut erfüllt werden.
In JOHLFKVSDQQXQJVJHNRSSHOWHQ Schaltungen dagegen werden die Driftgrößen mit der gleichen
Verstärkung übertragen wie das Nutzsignal.
6FKDOWXQJHQ]XU$36WDELOLVLHUXQJ
Schaltungstechnisch werden bevorzugt folgende Methoden zur AP-Stabilisierung angewendet
^
^
^
^
Gegenkopplung in linearen Schaltungen (Bilder 1.5.4, 1.5.7),
Einspeisung eines konstanten Emitterstromes (Konstantstromquelle),
Differenzverstärkerprinzip,
nichtlineare Temperatur-Kompensationsschaltungen mit Dioden, Transistoren, ...(Bild 1.5.8).
/LQHDUH6FKDOWXQJHQ]XU$36WDELOLVLHUXQJ
UCC
RB
RC
IB
IC
UBE
UCC
R1
RC
Iq
a) konstanter Basisstrom
R2
R1
A1
IB
UCE
UCC
RE
A2
b) Gleichstromgegenkopplung
IB
RC
IC
U
BE
UCE
c) Gleichspannungsgegenkopplung
Bild 1.5.7: Grundschaltungen zur AP-Einstellung und -stabilisierung
$3(LQVWHOOXQJGXUFKNRQVWDQWHQ%DVLVVWURP (Bild 1.5.7 a)
Wegen der starken Abhängigkeit des Kollektorstromes I C O B . I B von den Schwankungen der
Stromverstärkung B wird diese einfache Form der AP-Einstellung nur selten verwendet. Weiter gilt
IB =
U
U CC − U BE
O CC
RB
RB
für U CC >> U BE .
(1.5.9)
$3(LQVWHOOXQJXQGVWDELOLVLHUXQJGXUFK*OHLFKVWURPJHJHQNRSSOXQJ (Bild 1.5.7 b)
Das Basispotential UB = UBE + URE wird über den Spannungsteiler R1, R2 nahezu konstant gehalten,
solange der Querstrom Iq = (2 ...10) . IB groß gegenüber dem Basisstrom bleibt. Steigt nun IC wegen
einer Parameteränderung, so vergrößert sich auch der Spannungsabfall URE = IE . RE . In der Folge
davon wird UBE und so auch der Basisstrom IB verringert (Eingangskennlinie) und so der Änderung
des Kollektorstromes entgegengewirkt. Dieses Prinzip der 6WURPJHJHQNRSSOXQJ wird sehr oft zur
AP-Stabilisierung angewendet.
24
1. Elektronische Bauelemente
In der angegebenen Schaltung gilt bei ICB0 = 0
I CA =
U CC − U CEA
RE
.
− I BA
RC + RE
RC + RE
(1.5.10)
Nachteilig an dieser Schaltung gegenüber der einfachen Emitterschaltung in Bild 1.5.7 a) sind der
zusätzliche Spannungsverlust über RE (Aussteuerung, Verlustleistung, kleinere Signalverstärkung)
und ggf. der vergleichsweise große Querstrom Iq .
Wird Klemme A2 (meist bei RC = 0) als Ausgang der Schaltung in Bild 1.5.7 b) gewählt, so nennt
man die Schaltung wegen UA2 = Ue - UBE (PLWWHUIROJHU. Sie hat einen großen Eingangswiderstand,
r
einen kleinen Ausgangswiderstand [R ein O r BE + (1 + )R E , R aus O BE || RE ] und überträgt das Nutzsignal mit einer Spannungsverstärkung VU O 1 (Trennverstärker, Impedanzwandler).
$3(LQVWHOOXQJXQGVWDELOLVLHUXQJGXUFK*OHLFKVSDQQXQJVJHJHQNRSSOXQJ (Bild 1.5.7 c)
Bei steigendem IC sinkt zunächst UCE infolge des Spannungsabfalles über RC . Die Gegenkopplung
über Widerstand R1 bewirkt eine Reduktion des Basisstromes IB und damit auch eine Reduktion
des Kollektorstromes IC .
^ Die Gleichspannungsgegenkopplung stabilisiert sowohl die Ausgangsspannung UCE als auch
den Kollektorstrom IC .
1LFKWOLQHDUH6FKDOWXQJHQ]XU$36WDELOLVLHUXQJ
Zur Kompensation des Temperatureinflusses auf den Arbeitspunkt in analogen Schaltungen werden
besonders in integrierten Schaltungen Dioden und Transistoren eingesetzt (Bild 1.5.8). Meist wird
.
T ] von Transistoren
das Temperaturverhalten der BE-Spannung UBE [U BE = − (2, 2 ... 2, 5) mV
K
bzw. der Flußspannung UF von Dioden genutzt. In diskreten Schaltungen finden auch temperaturabhängige Widerstände Anwendung (Thermistor, Varistor).
^ Voraussetzung für eine effektive Wirkung der Schaltungen sind die enge thermische
Kopplung der betroffenen Bauelemente und nahezu gleiche Temperaturabhängigkeit der
entsprechenden Parameter.
UCC
R1
UCC
R1
RC
RC
A
e
A
e
R2
R
UF
D
E
U
R2
F
RE
D
Rv
UEE < 0
a) Kompensation von ∆ UBE
b) Kompensation von ∆ U BE und ∆ UCC
Bild 1.5.8: Nichtlineare Schaltungen zur Kompensation von Temperatureinflüssen
1. Elektronische Bauelemente
25
7UDQVLVWRULQ'LJLWDOVFKDOWXQJHQ
6WDWLVFKHV9HUKDOWHQ
Eine der wichtigsten Anwendungen von Transistoren ist die Realisierung HOHNWURQLVFKHU6FKDOWHU in
logischen Schaltungen (vgl. auch Abschnitt 2). Bei Schalterbetrieb des Transistors gibt es genau
zwei statisch stabile Zustände der Schaltung:
^ Schalter$86 (OFF)
^ Schalter(,1 (ON)
-
Transistor ist gesperrt,
Transistor ist leitend (übersteuert, gesättigt).
Das statische Verhalten des Transistors im Schalterbetrieb kann aus dem Ausgangskennlinienfeld
mit Widerstandsgerade (Bild 1.5.9) und/oder aus den Kennliniengleichungen abgeleitet werden.
^ Entsprechend den beiden Schaltzuständen gibt es zwei Arbeitspunkte X und Y (Bild 1.5.9).
Zur Kennzeichnung des Schaltzustandes werden nachfolgend die Kennwerte mit dem Index x
für gesättigten (leitenden) und mit dem Index y für gesperrten Transistor versehen.
IC
UCB= 0
X
I Cx
I Cü
UCC
I Bx
I Bü
RC
RB I
e
Ü
IB
Ue
PCmax
Y
I Cy
UCEx
UCEü
I
Iv
U
BE
IC
UCE
Rv
-U v
By
U
UCEy CC
IB
UCE
Bild 1.5.9: Transistorkenngrößen bei Schalterbetrieb, einfache Schaltstufe
7UDQVLVWRUJHVSHUUW (Arbeitspunkt Y)
Bei gesperrtem Transistor fließt per Definition kein Emitterstrom (IE = 0). An der6SHUUJUHQ]H fließt
wegen UCB’ >> UT der Kollektorreststrom ICB0 durch die Basis-Kollektor-Diode. Wird durch offenen
Basisanschluß oder anderweitig schaltungstechnisch IB = 0 erreicht, so kann dieser Reststrom ICB0
nicht über die Basis abfließen. Er fließt über die BE-Strecke des Transistors und bewirkt einen
Emitterstrom ICE0 = (1+BN ) . ICB0. Die Basis-Emitterstrecke ist also für IB = 0 nicht gesperrt!
Trotzdem wird die Kennlinie IB = 0 im Ausgangskennlinienfeld meist als Grenzkennlinie zwischen
aktivem Bereich und Sperrbereich angegeben (es existiert kein externes Steuersignal).
^ Im Arbeitspunkt Y (UCEy , ICy ; IBy ) für Schalterzustand AUS bzw. gesperrten Transistor gilt:
UCEy = U CC − R C ICy O UCC , ICy = ICE0 ( ICB0 < 20 nA ).
(1.5.11)
26
1. Elektronische Bauelemente
7UDQVLVWRUOHLWHQG (Arbeitspunkt X)
An der 6lWWLJXQJVbzwhEHUVWHXHUXQJVJUHQ]H (Punkt Ü in Bild 1.5.9) gilt UCB’ = 0 bzw. UCE = UBE
und aus Gl. (1.5.3) folgt ICsat = ICü = BN IBü , d.h. der Kollektorstrom ICü wird nur vom Basisstrom IB
bestimmt. Bei großen Werten des Basisstromes muß dazu noch der Spannungsabfall am inneren
Bahnwiderstand rBB’ berücksichtigt werden, es gilt dann UCB’ = - IB rBB’ .
Bei Erhöhung des Basisstromes auf IB = IBX > IBü kommt es zurhEHUVWHXHUXQJ des Transistors. Die
in die Basiszone transportierten Ladungsträger können nicht mehr linear in einen Kollektorstrom ICx
I
umgesetzt werden, d.h., die wirksame Stromverstärkung sinkt (B sat = B x = I Cx < B N ). Es stellt sich
Bx
der .ROOHNWRUVlWWLJXQJVVWURP ICx ein
U CC − U CEx
> I Cü .
RC
I Cx =
(1.5.12)
Es gilt
I Cx = I Cü + (I Cx − I Cü ) > I Cü
mit
U CC − U CEx
U − U CEü
, I Cü = CC
, U CEü > U CEx .
RC
RC
I Cx =
Zur Erzeugung dieses Sättigungszustandes muß im Basiskreis ein Strom IBx = m . IBü angeboten
werden. Der Faktor mwird hEHUVWHXHUXQJVIDNWRU genannt und praktisch zwischen m = 2 ... 10 frei
gewählt
m=
I Bx
I
= B N Bx .
I Bü
I Cü
(1.5.13)
^ Bei Übersteuerung sinkt die Ausgangsspannung von UCEü = UBEx ≈ (0,6 ... 0,8) V auf die
Rest- bzw. 6lWWLJXQJVVSDQQXQJ UCEx < 100 mV ... 300 mV.
^ Der Kollektorstrom dagegen ändert sich nur wenig (ICx ≈ ICü ), seine Größe wird fast nur noch
von der äußeren Beschaltung bestimmt (UCEx << UCC ):
I Cx =
U CC − U CEx
U
− U CEx
= I Cü + CEü
.
RC
RC
(1.5.14)
^ Damit ist der Arbeitspunkt X (ICx , UCEx ; IBx ) für den Schalterzustand EIN bzw. übersteuerten
Transistor bestimmt.
6FKDOWHUZLGHUVWlQGH
Für einen Transistorschalter können damit Ersatz-Schaltwiderstände RON und ROFF in den beiden
statischen Schaltzuständen definiert werden. Insbesondere das Verhältnis der beiden Werte ist ein
Gütemaß für einen elektronischen Schalter.
U
(,1
rCEx = R ON = I CEx
Cx
$86
rCEy = R OFF = I
O CC
I CE0
Cy
U CEy
U
(1 Ω ... 100 Ω) ,
(1.5.15)
( P 10 M).
(1.5.16)
1. Elektronische Bauelemente
27
=XUVWDWLVFKHQ%HPHVVXQJYRQ7UDQVLVWRU6FKDOWVWXIHQ
Bei vorgegebenem Kollektorstrom IC bzw. Kollektorwiderstand RC muß noch der (LQJDQJVNUHLV
dimensioniert werden (Bild 1.5.9). Zur Bemesssung des Ausgangskreises vgl. auch Abschnitt 2.
7UDQVLVWRUJHVlWWLJW(,1:
Wegen der einfachen Zusammenhänge wird sinnvoll von den Werten an der hEHUVWHXHUXQJVJUHQ]H
ausgegangen [UCB’ = UCBü = 0, ICü = BN IBü , UCEü = UBEü ≈ UBEx ]. Damit gilt
I Bü =
I Cü
U − U CEü
= CC
B min
B min R C
mit U CEü = U BEü O U BEx .
(1.5.17)
Wird der Transistor mit IB > IBü übersteuert, so sinkt die Kollektor-Emitter-Spannung UCE bis auf
die Sättigungsspannung UCEx , während sich der Kollektorstrom nur relativ geringfügig gegenüber
ICü ändert (Gl. 1.5.14). Der für diese Übersteuerung notwendige Basisstrom IBx > IBü ergibt sich zu
I Bx = m I Bü = m
U CC − U CEü
.
B min R C
(1.5.18)
^ Der Basisstrom IBx = m . IBü ist größer als an der Übersteuerungsgrenze (m = 2 ... 10), dagegen
bleibt die Spannung UBE nahezu unverändert (UBEü ≈ UBEx - Diodenkennlinie).
Weiter gilt im Eingangskreis der Transistorschaltung nach Bild 1.5.9
Uex = Iex RB + UBEx
mit
I vx =
bzw.
Iex = IBx + IVx
U BEx − U v
.
Rv
(1.5.19)
(1.5.20)
7UDQVLVWRUJHVSHUUW$86
Für gesperrten Transistor muß die BE-Diode sicher sperren (UBEy < UBEx ), dabei darf aber ihre
Durchbruchspannung UBES (typisch -5 V ... -7 V) nicht erreicht werden. Es wird gefordert:
U BES < U BEy < U BEx
(1.5.21)
^ Die Basis-Emitter-Sperrspannung UBEy kann praktisch im Bereich -5 V < UBEy < (0 ... 0,4) V
relativ frei gewählt werden.
^ Die negative Vorspannung Uv und damit der Widerstand Rv in der Schaltung nach Bild 1.5.9
bewirken, daß der Transistor auch für Eingangsspannungen Uey > UBEx sicher gesperrt werden
kann (vgl. auch statischer Störabstand, logische Schaltungen). Es gilt
Uey = Iey RB + UBEy
mit
I vy =
U BEy − U v
.
Rv
bzw.
Iey = IBy + IVy ≈ IVy
(1.5.22)
(1.5.23)
Damit sind die möglichen Gleichungen für die statische Bemessung der Elemente im Eingangskreis
zur Sicherung der beiden Schaltzustände X und Y in der Schaltung nach Bild 1.5.9 angegeben.
Die vorhandenen Freiheitsgrade zur Festlegung der Parameter müssen vom Entwickler auf Grund
von Erfahrungswerten vorgegeben und/oder mit Hilfe experimenteller Untersuchungen bzw. durch
Simulation ermittelt werden.
28
1. Elektronische Bauelemente
6FKDOW]HLWHQGHV7UDQVLVWRUVFKDOWHUV
Wird ein gesperrter Transistor durch ein sprungförmiges Eingangssignal in den leitenden Zustand
gesteuert, so vergeht erst eine 9HU]|JHUXQJV]HLW td, bevor ein nennenswerter Kollektorstrom IC
fließt. Der Basisstrom IB muß erst die Kapazität CBE von UBEy auf die Spannung UBEX umladen, also
Ladungsträger in die Basiszone transportieren.
Beim Abschalten des Transistors müssen diese in der Basiszone gespeicherten Ladungsträger erst
abfließen, bevor der Kollektorstrom abfällt. Es kommt zu einer 6SHLFKHU]HLW tS (vgl. auch Diode).
Während der Speicherzeit tS fließt der Kollektorstrom ICx noch in fast unveränderter Größe weiter,
obwohl Eingangssignal und Basisstrom ihr Vorzeichen bereits umgekehrt haben.
Bild 1.5.10 zeigt qualitativ die typischen Zeitverläufe für Ue , UBE , IB und IC bei Schalterbetrieb.
Die angegebenen Zeitwerte sind stark von den Transistorkennwerten, dem Ausschaltfaktor k, dem
Übersteuerungsfaktor m und der äußeren Beschaltung (RC , RB ) des Transistors abhängig.
^ Ein großer Übersteuerungfaktor m bewirkt kleine Werte für tr und td , dafür aber eine große
Speicherzeit tS . Ein großer Ausschaltfaktor k führt einerseits zu kleinen Werten für tf und tS ,
andererseits aber zu großen Verzögerungszeiten td .
Ue
Definitionen:
t
U
BE
UBEx
t
IB
t
I BS =
U ey − U BEX
RB
BN
+ B N C BC R C
2f N
$S = (
td O
1
0,1
-k
− I BS
−I BS
=
m
I Bü
I Bx
1 + 1 )
1
2f N
2f 1 (1 − A N A I )
Schaltzeiten:
IC
I Cü
m
0,9
k =
$ =
I
By
I BS
I Bx
I Bü
Transistorkennwerte:
UBEy
I Bx
m=
t
tr
td
ts
tf
U BEx − U BEy
Q B
= C BE
IB
I Bx
t r = $ ln
m − 0, 1
m − 0, 9
t f = $ ln
k + 0, 9
k + 0, 1
t S = $ S ln k + m
k+1
Bild 1.5.10: Zeitverläufe und Schaltzeiten für Schaltstufe mit Bipolartransistor /7/
1. Elektronische Bauelemente
29
)HOGHIIHNWWUDQVLVWRUHQ)(7XQLSRODUH7UDQVLVWRUHQ
Das Prinzip feldeffektgesteuerter Bauelemente beruht allgemein auf der 6WHXHUXQJGHV /HLWZHUWHV
eines leitfähigen Kanals. Dabei bestimmen vorwiegend die Majoritätsladungsträger des Kanals den
elektrischen Strom, daher auch der Name 8QLSRODUWUDQVLVWRU. Der Leitwert G eines Kanals mit
homogener Leitfähigkeit wird wesentlich durch seine Geometrie bestimmt:
G = q. n. . A
l
mit
(1.6.1)
q - Elementarladung, n - Ladungsträgerbeweglichkeit, µ - Ladungsträgerdichte,
A - Fläche des Kanals, l - Länge des Kanals (Herstellungstechnologie).
Aus praktischer Sicht gibt es zwei Möglichkeiten, den Kanalleitwert zu steuern:
^ Steuerung der Ladungsträgerdichte µ G Isolierschicht - FET (MIS-FET, IG-FET),
^ Steuerung des Kanalquerschnittes A G Sperrschicht - FET.
,VROLHUVFKLFKW)HOGHIIHNWWUDQVLVWRUHQ026)(7)
Technologisches Merkmal von Isolierschicht-FET (IG-FET) ist die Isolation der Steuerelektrode
*DWH G vom übrigen Halbleitermaterial. Bei dem wichtigsten Vertreter dieser IG-FET wird die
Isolation durch eine ca. 100 µm dünne SiO2 - Schicht erreicht, daher die Bezeichnung MOS-FET
(Petal-Rxid-Vemiconductor).
^ Das Steuerprinzip bei MOS-FET beruht auf der Änderung der Ladungsträgerdichte an der
Oberfläche eines Halbleiterkanals und läßt sich mit einem Kondensatormodell beschreiben.
p - Substrat
n+
6
p - Substrat
n-Kanal (n- )
n+
+
*
+
'
SiO
2
6
n-Kanal (n -)
n+
n+
+
'
*
+
Bild 1.6.1: Aufbau eines selbstsperrenden n-Kanal-MOS-FET, Kondensatormodell
Zwischen Drain D und Source S liegt bei n-Kanal-FET eine positive Spannung UDS > 0. Für UGS = 0
existiert kein leitender Kanal (Reststrom im pA-Bereich) und der Transistor ist gesperrt. Wird eine
Spannung UGS > 0 angelegt, so werden zunehmend freie Defektelektronen aus dem Kanal gedrängt
und freie Elektronen aus dem p-Substrat an die Oberfläche des Kanalgebietes LQIOXHQ]LHUW (gesaugt).
Der Kanal ändert mit wachsender Spannung UGS seinen Leitungstyp (Inversion):
^ ursprünglich p-leitend für UGS = 0,
^ Eigenleitung
für 0 < UGS < U Th (UTh -Threshold- Spannung),
^ n-leitend
für UGS ≥ UTh .
30
1. Elektronische Bauelemente
Der Drainstrom ID = IDS setzt bei einer Schwellspannung UGS0 = UTh ein. Im Kanal (n+ n- n+- Strecke)
fließen nun freie Elektronen, der Kanalleitwert wird so für UGS ≥ UTh proportional zu UGS gesteuert.
Wird bei konstanter Gate-Source-Spannung UGS die Drain-Source-Spannung UDS vergrößert, so
steigt der Drainstrom ID ebenfalls an.
Für UDS > UGS - UTh (Grenzkennlinie UDS = UGS - UTh) verarmt der Kanal vom drainseitigen Ende
her wieder an freien Ladungsträgern, es kommt zur sogenannten $EVFKQUXQJ (pinch-off). Der
Strom ID bleibt nun trotz weiterer Erhöhung von UGS fast konstant (Stromquellencharakter).
9HUDUPXQJVXQG$QUHLFKHUXQJVW\SHQ
Bei FET ist einerseits zwischen Komplementärtypen (n-Kanal, p-Kanal) und andererseits zwischen
VHOEVWOHLWHQGHQ und VHOEVWVSHUUHQGHQ Typen zu unterscheiden (vgl. auch Bild 1.6.3).
^ Der $QUHLFKHUXQJVW\S ist ohne Gatespannung gesperrt (selbstsperrend, enhancement). Der
leitende Kanal entsteht durch Anreicherung von Ladungsträgern aus dem Substrat an der
Kanaloberfläche bis zur Inversion des Leitungstypes. Der Kanalleitwert ist der angelegten
Steuerspannung UGS in weiten Grenzen direkt proportional. Die Polaritäten von UDS und UGS
sind gleich, was einfache Lösungen für integrierte Schaltungen ermöglicht.
^ 9HUDUPXQJVW\SHQ haben bereits ohne angelegte Torspannung (UGS = 0) einen leitenden Kanal
und bei vorhandener Spannung UDS fließt ein Drainstrom ID (selbsleitend, depletion). Mit der
Torspannung UGS kann nun der Kanalleitwert verringert oder auch vergrößert werden. Als
Nachteil für den Einsatz, besonders in integrierten Schaltkreisen, gilt die Forderung nach
entgegengesetzter Polarität von UDS und UGS (zwei Betriebsspannungen nötig).
Ausnahme: Realisierung eines Lastwiderstandes in MOS-FET- und MES-FET-Strukturen.
6SHUUVFKLFKW)(7
Bei Sperrschicht-FET (SFET) wird der Querschnitt A des leitfähigen Kanals elektronisch durch
Änderung der Breite einer Verarmungsschicht gesteuert (Sperrschicht eines pn-Überganges).
Wird z.B. ein n-leitender Kanal stirnseitig mit den beiden Elektroden 6 (Source) und ' (Drain)
kontaktiert und eine positive Spannung UDS > 0 angelegt, so fließt ein Drain-Strom ID . Oberhalb
des Kanals befindet sich das Gate * (stark dotiertes p-Gebiet). Zwischen Kanal und Gate bildet
sich eine Sperrschicht aus, die mit einer Gate-Source-Spannung UGS < 0 in ihrem Querschnitt
gesteuert wird. Je negativer UGS wird, um so weiter dehnt sich die Sperrschicht in den Kanal aus;
der Drainstrom ID sinkt. Für UGS = 0 ist der Kanal bereits leitend; SFET gehören damit zu den
VHOEVWOHLWHQGHQ )(7 Wegen der gegensätzlichen Polarität von UDS und UGS haben SFET keine
Bedeutung für die integrierte Schaltkreistechnik erlangt.
-
+
UGS
+
-
U DS
Sperrschicht
ID
G
p+
S
n - Kanal
D
Bild 1.6.2: Prinzip eines n-Kanal-Sperrschicht-FET
1. Elektronische Bauelemente
31
6WDWLVFKHV9HUKDOWHQYRQ026)(7
Die statischen Eigenschaften von FET werden wie bei Bipolartransistoren durch Kennlinienfelder
und -gleichungen beschrieben. Eine Übersicht über die Typen und Schaltsymbole zeigt Bild 1.6.3.
^ Für FET haben Stromübertragungs- und Eingangskennlinie praktisch keinen Sinn, weil der
Eingangsstrom IG wegen der isolierten Gate-Elektrode nahezu Null ist (fA ... pA). Sie werden
deshalb auch nicht angegeben.
Transferkennlinie
ID
Ausgangskennlinienfeld
Schaltsymbol
ID
5V
D
UGS
B
3V
G
-I
UDS
UGS
-I D
D
-9 V
D
-UGS
B
-7 V
S
-UDS
- UGS
I
ID
D
D
+2 V - U
GS
0V
B
G
-3 V
UDS
UGS
-I
D
-I D
-2 V
0V
D
UGS
B
+3 V
- UGS
p-Kanal, selbstleitend
G
S
+5 V
UTh
n-Kanal, selbstleitend
- Verarmungstyp bzw.
- Depletionstyp
S
-5 V
- UTh
p-Kanal, selbtssperrend
G
-5 V
-UTh
n-Kanal, selbstsperrend
- Anreicherungstyp bzw.
- Enhancementtyp
S
1V
UTh
Typ
- UDS
Bild 1.6.3: Klassifizierung von Isolierschicht-FET (MOS-FET), Schaltsymbole
32
1. Elektronische Bauelemente
Die 7UDQVIHUNHQQOLQLH ID = f {UGS } bei UDS = const. in Bild 1.6.3 zeigt, daß ein nennenswerter
Drainstrom ID erst für Steuerspannungen |UGS | ≥ UTh fließt.
^ Diese Schwellenspannung UTh ist nötig, um ein elektrisches Feld ausreichender Stärke aufzubauen. Für verschiedene Spannungen UDS ergeben sich verschiedene Kennlinien.
$XVJDQJVNHQQOLQLHQIHOG
Im $XVJDQJVNHQQOLQLHQIHOG ID = f {UDS ; UGS } von FET werden typisch drei Arbeitsbereiche
unterschieden (vgl. Bilder 1.6.3 und 1.6.4): ohmscher Bereich, Abschnürbereich, Sperrbereich.
ID
UDS = UGS - UTh
ohmscher
Abschnürbereich
Bereich
UDD
Durchbruchbereich
6V
RD
5V
IDG
ID
UGS
RD
4V
Pvmax
UDSsat
UDD
UBr
UGS
UDS
UDS
Sperrbereich
Bild 1.6.4: Ausgangskennlinienfeld eines selbstsperrenden n-Kanal-Isolierschicht-FET
2KPVFKHU%HUHLFK:
Der Drainstrom ID wächst fast linear mit UDS , der Kanalleitwert bleibt konstant. Der FET verhält
sich wie ein Widerstand (ohmscher Bereich). In diesem Bereich arbeitet der FET bei Schalterbetrieb, Schalter EIN (ON).
$EVFKQUEHUHLFK:
Für UDS > UGS - UTh wird die Steilheit der Ausgangskennlinie stetig kleiner, der leitende Kanal
verengt sich vom drainseitigen Ende her (Abschnürung, pinch-off). Der Drainstrom ID bleibt
schließlich trotz weiter steigender Spannung UDS nahezu konstant. Alle Ladungsträger sind am
Stromfluß beteiligt (Anreicherungstypen) bzw. sind aus dem Kanal verdrängt (Verarmungstypen).
Der Kanal selbst wird hochohmig (Stromquelle). Der zugehörige Spannungswert UDS wird
Sättigungsspannung UDS sat = UGS - UTh genannt. Für UGS = 0 wird UDSsat = - UTh . Die Verbindung
aller Abschnürpunkte im Kennlinienfeld ergibt die *UHQ]NHQQOLQLH (Gl. 1.6.5). ImAbschnürbereich
arbeitet der FET typisch in analogen Verstärkerschaltungen.
6SHUUEHUHLFK:
Bei fehlender bzw. geringer Gate-Spannung UGS < UTh ist der FET fast ideal gesperrt und sehr
hochohmig. Es fließt ein Reststrom im pA-Bereich.
In diesem Bereich arbeitet der FET im Schalterbetrieb, Schalter AUS (OFF).
1. Elektronische Bauelemente
33
'XUFKEUXFKEHUHLFK
Für UDS ≥ UBr erfolgt ein /DZLQHQGXUFKEUXFKder Drain-Source-Strecke. Der dabei mögliche große
Strom ID muß durch die äußere Beschaltung begrenzt werden, sonst wird der FET zerstört
ID <
P v max
U DS
(Leistungshyperbel).
(1.6.2)
^ Bei hochohmigen Eingangsschaltungen bzw. auch bei offenem Gate-Anschluß kann durch
elektrostatische Aufladung der Eingangskapazität CGS ein *DWH'XUFKEUXFK bewirkt werden.
^ Ein wirksamer Schutz sind Begrenzerschaltungen mit Dioden (und Widerstand).
(UVDW]VFKDOWELOG XQG.HQQOLQLHQJOHLFKXQJHQ
Ähnlich dem EBERS-MOLL-Ersatzschaltbild bei Bipolartransistoren wird auch für FET ein
nichtlineares Dioden-Ersatzschaltbild angegeben (Bild 1.6.5). Die Anordnung der Dioden richtet
sich dabei nach den dotierten Gebieten (Katode - n, Anode - p). Die Stromquelle IDS wird von der
Spannung UGS gesteuert und läßt sich mit den angegebenen Gleichungen in guter Näherung in den
schaltungstechnisch interessanten Bereichen beschreiben.
Erweitert man die Ersatzschaltung um die parasitären Kapazitäten CGS, CGD und CDS, kann sie auch
zur Beschreibung des dynamischen Verhaltens von FET verwendet werden (vgl. Abschnitt 1.6.6).
* (Gate)
CGS
C GD
IDS
6
'
(Source)
(Drain)
CDS
% (Bulk, Substrat)
Bild 1.6.5: Dioden-Ersatzschaltbild für n-Kanal-FET
RKPVFKHU%HUHLFK
U DS > U GS − U Th
I DO =
$EVFKQUEHUHLFK
(1.6.3)
U DS P U GS − U Th
I DA =
*UHQ]NHQQOLQLH
2 I DSS
(U GS − U Th )U DS − 1 U 2DS
2
U 2Th
I DSS
(U GS − U Th ) 2
U 2Th
(1.6.4)
U DS = U GS − U Th
I DG = I DSS
U DS
U Th
2
=
I DSS
U GS
2
− 1) 2
2 (U GS − U Th ) = I DSS ( U
Th
UT
(1.6.5)
34
1. Elektronische Bauelemente
)(7DOVVWHXHUEDUHU:LGHUVWDQG
Für bestimmte Anwendungen ist der Kleinsignal-Widerstand rDS der Drain-Source-Strecke von
U DS
Interesse. Er ergibt sich aus den Kennliniengleichungen durch partielle Differentiation r DS =
.
I DS
Für einen selbstsperrenden n-Kanal-MOSFET erhält man
r DS =
2
U Th
1
.
2 . I DSS U GS − U Th − U DS
(1.6.6)
Bei kleiner Restspannung UDS << UTh (UDS < 100 mV) gilt einfacher
r DS O
2
U Th
1
.
2 . I DSS U GS − U Th
(1.6.7)
^ Der Kleinsignal-Widerstand rDS der Drain-Source-Strecke kann mit der Gate-Spannung UGS
kontinuierlich, aber nichtlinear, gesteuert werden. Bild 1.6.6 a) zeigt diese Abhängigkeit
r DS = f U GS im Bereich UTh ... 2 UTh .
r*DS
r DS
1010
R DS, OFF
10 8
10 6
10 4
r*
DS1
R
10 2
UTh
2UTh
UGS
a)
DS, ON
0
2
4
6
8
10
UGS
V
b)
Bild 1.6.6: FET als steuerbarer Widerstand
Für Anwendungen eines FET im Schalterbetrieb sind die Widerstände RDSON, RDSOFF der Schaltstrecke Drain-Source in den stationären Arbeitspunkten bzw. das Verhältnis dieser beiden Werte
wichtig. Bild 1.6.6 b) zeigt die Abhängigkeit r DS = f U GS allgemein, aus dem auch die Werte für
den Schalterbetrieb zu entnehmen sind.
^ Wegen I Dy O 0 ist der OFF-Widerstand RDS OFF sehr groß (M ... G).
^ Der ON-Widerstand RDS ON ist vergleichsweise niederohmig (100 ... k ).
1. Elektronische Bauelemente
35
6FKDOWVWXIHQPLW)(7
Als Schalttransistoren werden in integrierten Schaltkreisen fast ausschließlich selbstsperrende FET
verwendet, sie haben bei fehlender Gate-Source-Spannung, also ohne externes Steuersignal, einen
hochohmigen Kanal und der Transistor ist gesperrt. Soll der Transistor leiten, so muß eine externe
Spannung UGS > UTh angelegt werden.
Diese Steuerspannung UGS hat die gleiche Polarität wie die Drain-Source-Spannung UDS bzw. wie
die Betriebsspannung UDD. Sie kann direkt als Ausgangsspannung eines FET-Schalters erzeugt
werden, eine zusätzliche Spannung ist nicht nötig.
Wegen der 6SDQQXQJVVWHXHUXQJ des Stromes ID = f {UGS } werden keine Zusatzschaltungen zur
Erzeugung eines Eingangsstromes (wie IB bei Bipolartransistoren) benötigt. Bild 1.6.7 zeigt einige
einfache Schaltstufen mit MOS-FET. Weitere Schaltungen sind in den nachfolgenden Abschnitten
angegeben.
^ FET-Stufen werden direkt gekoppelt, Widerstände im Eingangskreis sind i.a. nicht nötig.
^ In integrierten Schaltungen wird als Arbeitswiderstand RD meist ein weiterer FET verwendet,
dessen Kanalwiderstand relativ zum Widerstand rDS, ON des leitenden Schalttransistors groß ist
(T2 in Bild 1.6.7).
UDD
U2
RD
a
e
T1
0V
U
DD
T 2 (SS)
a
e
T1
0V
a
e
U
DD
U
DD
T 2 (SL)
T2
(p-Kanal)
a
e
T1
(n-Kanal)
T1
0V
0V
CMOS
Bild 1.6.7: Einfache Schaltstufen mit MOS-FET (SS-selbstsperrend, SL-selbstleitend)
Bei Einsatz eines selbstsperrenden FET als T2 liegt der hohe Ausgangspegel UaH der Schaltung, bei
gesperrtem Schalttranssistor T1, um etwa UGS2 > UTh unter dem Betriebsspannungswert UDD . Mit
einer um diesen Schwellwert höheren zweiten Spannung am Gate von T2 kann das vermieden
werden (Aufwand).
Eine bessere Lösung ermöglicht der Einsatz eines selbstleitenden FET als "Arbeitswiderstand" RD,
vorausgesetzt, der verwendete Transistor hat eine genügend kleine Schwellspannung UTh < 1 V (mit
modernen Technologien möglich). Die besten Ergebnisse werden in CMOS-Technologie erreicht.
36
1. Elektronische Bauelemente
'\QDPLVFKHV9HUKDOWHQYRQ)(76FKDOWVWXIHQ
Die Schaltzeiten des FET als Schalter werden im wesentlichen durch die zwischen den Elektroden
wirksamen parasitären Kapazitäten CGS, CDS und CGD sowie durch die Lastkapazität CL und die
äußere Schaltung (Gegenkopplung) bestimmt (Bilder 1.6.5, 1.6.8).
^ So wird die innere Kapazität CDG nach Gl. (1.6.8) in der angegebenen Schaltung transformiert
in der Eingangskapazität Ce der Schaltung wirksam (Millereffekt __> C GD = V U C GD ).
UeH U e
UDD
t
C
DG
RD
Ri
U
GS
U
Th
t
CDS
C
ID
CL
GS
td
t
Ue
Ua
Ua
t
Bild 1.6.8: Typische Zeitverläufe für n-Kanal-MOSFET im Schalterbetrieb
Bei sprunghafter Signaländerung am Eingang e der Schaltstufe muß die Spannung UGS am Gate des
Schalttransistors zunächst die Schwellspannung UTh erreichen. Der Drainstrom ID schaltet deshalb
erst nach einer Verzögerungszeit td ein.
Mit $ ein = R i C e gilt (Ri - Innenwiderstand der Signalquelle Ue):
t d = $ ein . ln
U eH
U eH − U Th
mit C e = C GS + C GD . S
R D r DS
.
R D + r DS
(1.6.8)
Zur Änderung der Ausgangsspannung des FET-Schalters müssen die innere Kapazität CDS und die
Lastkapazität CL umgeladen werden. Da der Widerstand rDS der Schaltstrecke sehr stark von der
Aussteuerung bestimmt ist, wird die Zeitkonstante $ aus bei leitendem Transistor (Entladen) deutlich
kleiner als bei gesperrtem Transistor (Aufladen). Nur bei CMOS-Schaltstufen sind die Zeitkonstanten für beide Umladevorgänge nahezu gleich (echte *HJHQWDNWVWXIH, vgl. Abschnitt 2.4). Für
$ aus gilt allgemein:
$ aus = (C DS + C L )
R D r DS
.
R D + r DS
(1.6.9)
^ Für rDS ist dabei der jeweils aktuelle Widerstandswert rDS, ON bzw. rDS, OFF der Schaltstrecke
Drain-Source einzusetzen.
^ Eine Speicherzeit wie bei Bipolartransistoren tritt bei FET nicht auf, es gibt deshalb auch
keine Antisättigungsschaltungen.
1. Elektronische Bauelemente
37
6FKDOWYHUKDOWHQHLQIDFKHUSDVVLYHU=ZHLWRUH6SDQQXQJVWHLOHU
Das Zweitor ist ein Netzwerk mit je zwei Eingangs- und Ausgangsanschlüssen. Es spielt u.a. bei
der Modellierung komplexer elektronischer Schaltungen eine wichtige Rolle (vgl. Abschnitt 3).
^ Mit der Zweitortheorie läßt sich die Analyse von Schaltungen oft vereinfachen, da nur das
.OHPPHQYHUKDOWHQ, nicht aber die konkrete Innenschaltung, zur Beschreibung benötigt wird.
Hier wird das Schalt- bzw. Impulsverhalten einfacher passiver Zweitore (Spannungsteiler) analysiert. Insbesondere Schaltungen mit RC-Gliedern spielen bei der Realisierung von zeit- bzw.
frequenzabhängigen Schaltungen eine wichtige Rolle. Sie treten aber oft auch parasitär auf und
beeinflussen so das Zeitverhalten digitaler Schaltungen.
6FKDOWYHUKDOWHQRKPVFKHU6SDQQXQJVWHLOHU
Wird in einem Gleichstromkreis mit einem ohmschen Widerstand R und ohmscher Last RL die
Gleichspannung UI zwischen den Werten Umax , Umin umgeschaltet, so ändern sich auch die Ströme
II und Io und damit die Ausgangsspannung Uo zum gleichen Zeitpunkt sprungförmig (Bild 1.7.1).
UI
Zweitor
II
Umax
R
Io
U min
UR
UI
U
Uo
RL
t
Uo
U max
UR
UoH
U oL
t
Io
I I = - Io
I oH
UI = UR + Uo
I oL
Io = - I I
t
Bild 1.7.1: Schaltverhalten eines ohmschen Spannungsteilers; Schaltung und Zeitdiagramm
Wegen Io = - II und Uo = -Io RL = II RL folgt aus der Maschengleichung UI = UR + Uo = II (R + RL )
UI
R
−I o = I I = R + R
bzw. U o = U I R + LR .
L
L
Die zwei möglichen diskreten Werte für Ausgangsstrom und -spannung erhält man, indem für UI
die Werte UIL = UI min und UIH = UI max eingesetzt werden. Die LQQHUH Spannung UR über dem
Widerstand R ergibt sich aus der Differenz UR = UI - Uo .
^ In Netzwerken mit ohmschen Widerständen ändern sich alle Spannungen stets zeitgleich mit
der Eingangsspannung, ihre Amplituden werden aber gedämpft (Spannungsteiler).
^ Ohmsche Widerstände bewirken beim Schalterbetrieb typisch die Begrenzung von Strömen,
aber keine Veränderungen (Verzögerungen) im Zeitverlauf.
38
1. Elektronische Bauelemente
6FKDOWYHUKDOWHQYRQ5&*OLHGHUQ
Das Impulsverhalten von Spannungsteilerschaltungen mit Kondensatoren (RC-Glieder) spielt eine
wichtige Rolle beim Schaltverhalten logischer Schaltungen (vgl. auch Abschnitte 2, 3, 11). Darüber
hinaus wird es zur Realisierung von zeit- bzw. frequenzabhängigen Schaltungen genutzt.
^ Infolge der Kapazität ]HLWDEKlQJLJHU Widerstand) kommt es zu Verzögerungen zwischen
Ein- und Ausgangssignalen bzw. zu Strom- und/oder Spannungsspitzen.
9HU]|JHUXQJVJOLHG7LHISD
Wir gehen davon aus, daß die Eingangsspannung der Schaltung in Bild 1.7.2 auf UI = 0 liegt und
der Kondensator C vollständig entladen ist [Q (t0) = 0, UC (t0) = 0]. Vereinfachend wird hier Io = 0
vorausgesetzt. In der Schaltung gilt
II = IC =
UI − UC
R
bzw. U I = U R + U C = R . I I + U C .
Schaltet nun zum Zeitpunkt t = t0 die Spannungsquelle UI sprunghaft auf UI = UI max , so bleibt die
Spannung UC wegen der Ladungsspeicherung der Kapazität zunächst konstant mit UC (t0 ) = 0. Es
müssen erst Ladungsträger transportiert und gespeichert werden, um die Spannung UC zu ändern,
dazu wird Zeit benötigt (∆Q = IC . ∆ t = C . ∆UC ). Im Zeitpunkt t = t0 fließt so schlagartig ein großer
U
/DGHVWURP I C (t 0 ) = RI . Es werden Ladungsträger transportiert und der Kondensator wird geladen.
Die Spannung UC steigt an und wächst kontinuierlich gegen den Wert UI max , während der Strom IC
gegen Null sinkt.
Qualitativ die gleichen Aussagen gelten für den Ausschaltvorgang. Der aufgeladene Kondensator
hält bei sprunghafter Änderung der Eingangsspannung UI (t1 ) seine Spannung zunächst konstant auf
dem im Ladevorgang erreichten Wert, hier UC (t1 ) = UI max . Der Strom IC ändert sich sprunghaft auf
U
den Wert I C (t 1 ) = − IRmax . Er fließt in umgekehrter Richtung zum Ladestrom und entlädt den
Kondensator ((QWODGHVWURP). Spannung und Strom am Kondensator klingen kontinuierlich gegen
Null ab (Anfangswerte).
UI
II
UImax
R
UI
II
Zweitor
II
UI
UC
t
R
IC
C
t1
- UImax t 0
Io
R
UImax
Uo
Uo
UR
U Imax
UR
Uo= UC
t0
-U Imax
Bild 1.7.2: Schaltverhalten eines RC-Verzögerungsgliedes
Uo
t1
t
1. Elektronische Bauelemente
39
Die Bestimmung der Zeitverläufe von Strom und Spannung für die Kondensatorumladungen
dU (t)
gelingt allgemein mit I C (t) = C dtC
aus der Knotengleichung. Man erhält damit eine lineare
inhomogene 'LIIHUHQWLDOJOHLFKXQJ erster Ordnung
dU C (t) U C (t) U I
+ $ = $
dt
mit $ = R . C .
(1.7.1)
Zur Lösung linearer Differentialgleichungen dieses Typs kann folgender Lösungsansatz verwendet
werden (t = t − t 0 )
t
U C (t) = A + B . e − $
mit U C (t G ) = A
und
U C (t = 0) = A + B .
(1.7.2)
Für den Zeitverlauf der Kondensatorspannung UC (t) gilt damit
t
U C (t) = U C () + [U C (0) − U C () ]e − $
(1.7.3)
oder für ein spezielles Zeitintervall t = t − t 0
t = $ . ln
U C (0) − U C ()
.
U C (t) − U C ()
(1.7.4)
^ Meist wird vereinfachend t0 = 0 und damit t = t gesetzt.
Für den Zeitverlauf des /DGHVWURPHV IC erhält man
I C (t) = C
t
dU C (t) U C () − U C (0) − t
U I − $t
=
e $ =
e
= I C (0) . e − $ .
R
R
dt
(1.7.5)
Für die gegebene Schaltung in Bild 1.7.2 gilt mit U I = U I max wegen UI (0) = 0 und UC () = UI max
t
t
U
U C (t) = U I max (1 − e − $ ) bzw. I C (t) = IRmax e − $ .
(1.7.6)
Für den Entladevorgang folgt wegen U I = −U I max , UC (t1 ) = UI max und UC () = 0 mit t = t − t 1
t
U C (t) = U I max e − $
t
U
bzw. I C (t) = − R I e − $ .
(1.7.7)
I C (0)
^ Die Zeitkonstante $ = R . C gibt das Zeitintervall an, in dem der Ladestrom IC auf e
U
die Entladespannung auf Iemax absinkt. Das folgt aus den Gleichungen für t = $ .
bzw.
Die Zeitverläufe für die beiden Ladevorgänge am Kondensator sind in Bild 1.7.2 angegeben.
Deutlich ist die Verzögerung der Ausgangsspannung UC (t) = Uo (t) gegenüber einer sprunghaften
Änderung der Eingangsspannung UI zu erkennen.
Mit den Definitionen aus der Impulstechnik UC (t = tr ) = 0,9 . UCmax bzw. UC (t = tf ) = 0,1 . UCmax gilt
für die Anstiegszeit tr (rise time) und die Abfallzeit tf (fall time) der Ausgangsspannung
tr = tf = R . C . ln 10.
(1.7.8)
40
1. Elektronische Bauelemente
'LIIHUHQ]LHUJOLHG+RFKSD
Eine in elektronischen Schaltungen ebenfalls häufig verwendete bzw. parasitär wirksame Schaltung
ist das sogenannte 'LIIHUHQ]LHUJOLHG (Bild 1.7.3). Eine Berechnung der Zeitverläufe von Strom und
Spannung führt im Prinzip auf die selben Gleichungen, wie sie oben für das Verzögerungsglied
angegeben sind. Das wird auch klar, wenn die Schaltung entsprechend Bild 1.7.3 b) umgezeichnet
wird. Der wesentliche Unterschied in der Anwendung der beiden Schaltungen in Bild 1.7.2 und
Bild 1.7.3 besteht in der Wahl der Ausgangsspannung. Bei der Schaltung in Bild 1.7.2 wird die
Spannung Uo = UC , beim Differenzierglied die Spannung Uo = UR als Ausgangssignal gewählt. Sie
ergibt sich als Differenz aus der Eingangsspannung UI und der Kondensatorspannung UC (Lösung
der Differentialgleichung) in der Form Uo = UR = UI - UC .
Zweitor
II
Zweitor
UR
UC
Io
- II
R
IR
C
Io
IC
R
UI
IR
Uo
-U
C
- UC
I
Uo = U R
UR = U o
b) Schaltung a) umgezeichnet
a) Differenzierglied
Bild 1.7.3: RC-Glied mit differenzierendem Verhalten
6FKDOWYHUKDOWHQHLQHU,QGXNWLYLWlW
Auch Induktivitäten führen im Schalterbetrieb zu Verformungen der Signalverläufe (Bild 1.7.4). In
digitalen Schaltungen tritt die Induktivität insbesondere als /HLWXQJVLQGXNWLYLWlW unerwünscht in
Erscheinung (vgl. Abschnitt 11). Die Zeitverläufe von Strom und Spannung gewinnt man wieder
durch Lösen einer Differentialgleichung. Die Analogie zu den Schaltungen mit Kapazitäten wird
deutlich, wenn man Strom und Spannung in den entsprechenden Gleichungen vertauscht.
U
UL
UImaxI
Zweitor
II
R
Io
UL
IL
UI
UL
L
UI
t1
t0
Uo
t
- UImax
IL
UImax
Grundbeziehungen:
dI
UL= L L , I = ∫ U dt, τ = L
dt
L
L
R
Bild 1.7.4: Schaltverhalten an einer Induktivität
R
t0
t1
t
1. Elektronische Bauelemente
41
=XU/|VXQJOLQHDUHU'LIIHUHQWLDOJOHLFKXQJHQ
Verfahren zur Lösung linearer Differentialgleichungen werden als bekannt vorausgesetzt bzw. sind
der einschlägigen Literatur zu entnehmen. Hier erfolgt deshalb nur eine kurze Zusammenstellung
der wesentlichen Fakten. Eine Gleichung der Form
dy (x)
y' + p(x) . y + q(x) = 0 mit y' = dx
(1.7.9)
heißt OLQHDUH Differentialgleichung erster Ordnung (die unbekannte Funktion und ihre Ableitung
sind linear enthalten). Sie wird lineare KRPRJHQH Differentialgleichung genannt, wenn q(x) ≡ 0.
Diese läßt sich integrieren, indem sie als Differentialgleichung mit JHWUHQQWHQ9DULDEOHQ behandelt
wird. Aus y' + p(x) . y = 0 erhält man durch Trennung der Variablen und Integration
dy
y + p(x)dx = 0, G ln y = − p(x)dx + c .
(1.7.10)
Über e ln y = e − p dx+ c erhält man die allgemeine Lösung der homogenen Differentialgleichung zu
y = C . e − p dx mit C = e c .
(1.7.11)
Die Lösung der inhomogenen Differentialgleichung (1.7.9) gewinnt man nun daraus nach dem von
/DJUDQJH angegebenen Verfahren der 9DULDWLRQ GHU .RQVWDQWHQ. Danach wird C in Gl. (1.7.11)
nicht als Konstante, sondern als Funktion C = C(x) aufgefaßt.
y = C(x) . e − p dx = C(x) . )(x) .
(1.7.12)
Durch Differenzieren und Einsetzen in Gl. (1.7.9) erhält man
y' = C'(x) . )(x) +C(x) . )'(x)
(1.7.13)
C'(x) . )(x) + [C(x) . )'(x) + p . C(x) . )(x)] + q = 0.
(1.7.14)
Der Ausdruck in der eckigen Klammer erfüllt die homogene DGL y' + p . y = 0 und verschwindet.
Wir erhalten zur Bestimmung von C(x) die Differentialgleichung
C'(x) . )(x) + q(x) = 0.
(1.7.15)
Daraus folgt
C(x) = C 1 + q(x) . e p(x) dx dx
(1.7.16)
y = e − p(x) dx C 1 + q(x) . e p(x) dx dx .
(1.7.17)
^ Wird in Gl. (1.7.17) das unbestimmte Integral durch das Integral zwischen den Grenzen x0
und x ersetzt, so erhält man für x = x0 eine spezielle Lösung für y mit y = C1 .
^ Ist eine partikuläre Lösung y1 (x) der linearen Differentialgleichung bekannt, so ergibt sich die
allgemeine Lösung nach der Beziehung y = y1 + C 1 . e − p(x) dx .
^ Sind zwei linear unabhängige partikuläre Lösungen y1 (x) und y2 (x) bekannt, so erhält man
die allgemeine Lösung auch RKQH,QWHJUDWLRQ nach y = y1 + C1 . (y2 - y1 ).
42
1. Elektronische Bauelemente
2SHUDWRUHQPHWKRGH]XU/|VXQJOLQHDUHU'LIIHUHQWLDOJOHLFKXQJHQ
Die Operatorenmethode zur Lösung gewöhnlicher Differentialgleichungen besteht im wesentlichen
darin, daß man für die unbekannte Funktion eine +LOIVJOHLFKXQJ (Transformierte) in Form einer
gewöhnlichen algebraischen Gleichung einführt. Aus ihr wird die gesuchte Funktion bestimmt. Die
Hauptaufgabe der Operatorenmethode liegt damit in der Bestimmung der Transformierten und in
der Rücktransformation der Lösung.
7UDQVIRUPDWLRQGHU)XQNWLRQ
Als Transformierte einer gegebenen Originalfunktion '(t) wird nach +HDYLVLGH eine Funktion f(p)
der komplexen Variablen p eingeführt
f (p) = p e − pt '(t)dt .
(1.7.18)
0
Die 8PNHKUIRUPHO liefert die Originalfunktion '(t) , wenn die Transformierte f(p) bekannt ist
s+jr
f (p)
e pt p dp mit
'(t) = 1 lim
2j r G s−jr
f (p)
p − Laplace-Transformierte.
(1.7.19)
Wichtige Eigenschaften der transformierten Funktion sind
t
d' (t)
p
f (p)
G p [f (p) − '(0) ] ; '(t)dt G p ; '(a t) G f ( a ) mit a = konst. > 0 .
dt
0
p
9HUVFKLHEHVDW]: Ist '(t) G f (p), so gilt e − a t . '(t) G p + a f (p + a) .
(1.7.20)
(1.7.21)
In praktischen Anwendungen kann oft auf die eigentliche Rücktransformation verzichtet werden.
Mit Hilfe der *UHQ]ZHUWVlW]H können Grenzwerte im Zeit- und Frequenzbereich ermittelt werden,
der Zeitverlauf zwischen diesen Grenzen ist meist qualitativ bekannt (z.B. e-Funktion). Es gilt
lim 1p f (p) = tlim
G '(t) bzw.
pG0
lim 1
'(t) .
p f (p) = tlim
G0
(1.7.22)
pG
%HLVSLHO:
Die Ausgangsspannungen Uo (p) der Schaltungen in Bild 1.7.5 erhält man durch Anwendung der
Spannungsteilerregel. Bei positivem Sprung der Eingangsspannung gilt UI (p) = p . UI max . Damit
können die Grenzwerte im Zeitbereich bestimmt werden (vgl. auch Bilder 1.7.2 und 1.7.3).
II
R
UC
UI
II
Io
1
pC
Uo
R
UI
Uo
b) Differenzierglied
1
pU I
1 + pCR
U o (p ) =
pG
lim 1
U o (t) = 0
p U o (p) = lim
tG0
pG
lim 1
p U o (p) = tlim
G U o (t) = U I ()
pG0
pG0
Io
UC
a) Verzögerungsglied
U o (p ) =
1
pC
pCR
pU I
1 + pCR
lim 1
U (t) = U I (0)
p U o (p) = tlim
G0 o
lim 1
p U o (p) = tlim
G U o (t) = 0
Bild 1.7.5: Zur Anwendung der Operatorenmethode
.
2. Elektronische Schalter
1
(OHNWURQLVFKH6FKDOWHU
In der Digitaltechnik werden nur die GLVNUHWHQ Werte eines Signales verarbeitet, in der binären
Technik sind es nur zwei (logisch 1 und 0). Zur logischen 9HUNQSIXQJ von Binärwerten genügt
meist der JHVWHXHUWH 6FKDOWHU. Große praktische Bedeutung haben elektronische Schalter auf der
Basis von Halbleiterbauelementen (Transistor, Diode, ... ) in Form von integrierten Schaltkreisen.
^ Elektronische Schalter benötigen eine positive und/oder negative Betriebsspannung UB+, UB- .
Sie werden mit binären Signalen angesteuert und geben selbst wieder binäre Signale ab. Die
Signalspannungspegel liegen innerhalb der Betriebsspannungsgrenzen und entsprechen einem
6SDQQXQJVEHUHLFK +igh bzw. /ow. Zwischen dem H- und L-Bereich wird ein verbotener
Bereich definiert. Signalpegel in diesem Bereich sind statisch nicht zugelassen.
,GHDOHUXQGUHDOHU6FKDOWHU
6WDWLVFKHV9HUKDOWHQ
Bild 2.1 zeigt geschaltete Gleichstromkreise mit Gleichspannungsquelle UB, Lastwiderstand RL und
idealem bzw. realem Schalter S. Für die Schalterstellungen (LQ$XV werden die Stromkreise durch
die $UEHLWVSXQNWH E = E(Ix, USx) und A = A(Iy, USy) im zugehörigen I-U-Diagramm beschrieben.
RL
RL
I
+
U
B
r >> R >> r
y
L
x
I
S
+
U
B
U
S
S
ry
U
S
rx
idealer Schalter
realer Schalter
I
Ei
UB - U S
I=
RL
I
rx
Ix
Er
I=
Ai
US
UB
UB - U S
R
L
Uy
Ux
ry
$86
USy = UB ,
Iy = 0
USy = r + R U B,
y
L
(,1
USx = 0,
Ix = R B
L
U
USx = r +xR U B,
x
L
/HLVWXQJ PVEIN = 0, PVAUS = 0
ry
Ar
Iy
r
US
U
Iy = r +BR
y
L
U
Ix = r + BR
x
L
PVEIN = USx Ix > 0, PVAUS = USy Iy > 0
Bild 2.1: Gleichstromkreise mit Schalter S; Arbeitspunkte im I-U-Diagramm
2
2. Elektronische Schalter
Wird der Schalter S als ideal betrachtet, so liegen die Arbeitspunkte Ei, Ai im I-U-Diagramm auf
den Koordinatenachsen, da jeweils eine der Schalterkenngrößen US , I = IS den Wert Null annimmt.
^ Der ideale Schalter arbeitet verlustfrei, es entsteht keine Verlustleistung (Pv = US . IS = 0).
Der UHDOH 6FKDOWHU hat im Gegensatz zum idealen Schalter in beiden statischen Schaltzuständen
einen endlichen Widerstand rx bzw. ry ; die Arbeitspunkte Er , Ar liegen damit nicht mehr auf den
Achsen des I-U-Diagramms (Bild 2.1).
^ Beim realen Schalter entsteht in beiden Schaltzuständen eine VWDWLVFKH 9HUOXVWOHLVWXQJ, die
von der Größe der Schalterwiderstände rx und ry , der Versorgungsspannung UB sowie der
Last RL abhängig ist.
Das I-U-Diagramm des Gleichstromkreises mit realem Schalter in Bild 2.1 zeigt deutlich die
Analogie zum Verhalten einer Schaltstufe mit Bipolartransistor (vgl. Abschnitt 1.5).
'\QDPLVFKHV9HUKDOWHQ
Ein idealer Schalter arbeitet trägheitslos, d.h., die Umschaltung zwischen den beiden stationären
Schaltzuständen Ein/Aus benötigt keine Zeit (vollzieht sich sprunghaft).
^ Der reale Schalter ist im Gegensatz zum idealen Schalter WUlJH, zum Umschalten zwischen
den beiden Schaltzuständen wird eineendliche8PVFKDOW]HLW TU benötigt.
Bei Annahme einer zeitlinearen Änderung von Strom und Spannung am Schalter S gilt:
i S (t) = I max t
TU
=
UB t
RL TU
u S (t) = U max (1 − Tt ) = U B (1 − Tt )
U
U
(2.1.1)
(2.1.2)
Damit erhält man für den zeitlichen Verlauf der Leistung und deren Mittelwert während der
Umschaltzeit TU :
U2
S(t) = uS . iS = R B Tt (1 − Tt ) ,
L
U
U
TU
U2
PVdyn = T1 S(t)dt = 6RB .
U 0
L
(2.1.3)
(2.1.4)
^ Infolge der endlichen Umschaltzeit TU entsteht am realen Schalterzusätzlich zur statischen
Verlustleistung auch eine G\QDPLVFKHVerlustleistung Pvdyn, die in erster Näherung nur durch
das Quadrat der Betriebsspannung UB und den Lastwiderstand RL bestimmt wird (vgl. auch
Abschnitt 3.3).
2. Elektronische Schalter
3
6FKDOWVWXIHQPLW7UDQVLVWRUHQ
Zur Realisierung elektronischer "gesteuerter" Schalter werden vorwiegend Transistoren verwendet.
Die Anwendung von Dioden als Schalter beruht auf ihrer "Ventilwirkung", d.h. das Signal steuert
den Schalter selbst und muß auch die Nutzleistung selbst aufbringen. Ein eigentliches Steuersignal
existiert nicht. Schaltdioden sind in vielen Eingangs-9HUNQSIXQJVJOLHGHUQ logischer Schaltungen
enthalten.
Das Prinzip von Schaltstufen mit bipolaren bzw. unipolaren Transistoren (FET) zeigt Bild 2.2.1.
Die Schalterzustände(LQ$XV werden durch die Zustände TransistorOHLWHQGJHVSHUUWrealisiert. Das
statische Verhalten der Schaltung wird aus den Kennlinienfeldern und/oder den entsprechenden
Kennliniengleichungen der Transistoren abgeleitet (vgl. auch Abschnitte 1.5, 1.6).
UCC
UR
RC
e
IR
Ue
R
B
a
RB I
B
e
U CC
UBE
IC
I
U CE
UBE
UCE
IC
IB
a
R
RC
Ue
UR
pnp-Transistor
npn-Transistor
IR =
U CC − U CE
, U CE > 0
RC
IR =
U CC + U CE
, U CE < 0
RC
IB =
U e − U BE
RB
IB =
(U BE + U CC ) − U e
, U BE < 0
RB
U
DD
RD
IR
UDD
UGS
UR
e
a
ID
UDS
I =0
G
ID
I =0
G
e
IR
U DS
UGS
RD
n-Kanal-FET
IR =
U DD − U DS
RD
I G O 0, U e = U GS
a
UR
p-Kanal-FET
IR =
U DD + U DS
, U DS < 0
RD
I G O 0, U e = U DD + U GS , U GS < 0
Für leitenden FET:
U ex P U GSo , U GSo = U Th > 0
U ex > U DD + U GSo , U GSo = U Th < 0
Bild 2.2.1: Grundschaltungen für Schaltstufen mit Bipolartransistor und FET
4
2. Elektronische Schalter
6FKDOWVWXIHQPLW%LSRODUWUDQVLVWRU
Als Schaltstrecke dient die Kollektor-Emitter-Strecke (UCE, IC) des Transistors. Der Schaltvorgang
wird durch den Basisstrom IB (und die Basis-Emitter-Spannung UBE ) gesteuert. Wir beschreiben im
folgenden vorzugsweise Schaltstufen mit npn-Transistoren. Unter Beachtung der Stromrichtungen
und Spannungspolaritäten gelten diese Betrachtungen auch für Schaltstufen mit NRPSOHPHQWlUHQ
pnp-Transistoren.
Für IB = 0 (UBE < UBEx ) sind beide pn-Übergänge des Transistors (Basis-Emitter-Diode, KollektorBasis-Diode) stromlos, d.h. der Transistor ist gesperrt. Der Widerstand rCEY der Schaltstrecke ist
sehr groß, es fließt nur ein kleiner Reststrom ICy = ICE0 ≈ 0. In der Schaltung nach Bild 2.2.1 entsteht
kein Spannungsabfall über dem Widerstand RC und es gilt UCEy ≈ UCC. Damit ist der Arbeitspunkt
für den Schalterzustand $86 (UCEY, ICY; IBy, UBEy ) festgelegt. Im Ausgangskennlinienfeld entspricht
U −U
er dem Schnittpunkt der Kennlinie IB = 0 mit der Arbeitsgeraden I C = CCR CE .
C
Für IB > 0, UBE ≥ UBEx wird der Transistor eingeschaltet, für IB = IBX ≥ IBÜ sogar übersteuert. Der
Widerstand rCEX der CE-Strecke ist jetzt sehr klein und es fließt ein Kollektorstrom ICx . Es entsteht
ein Spannungsabfall über dem Widerstand RC (Bild 2.2.1) und es gilt UCE = UCEx ≈ 0. Der Arbeitspunkt (,1wird durch die Kenngrößen UCEX, ICX; UBEX, IBX beschrieben.
Bei der Dimensionierung der Schaltung muß beachtet werden, daß in beiden Schaltzuständen die
maximal zulässige Verlustleistung PVmax nicht überschritten wird. Anschaulich gesprochen müssen
im Ausgangskennlinienfeld somit die beiden Arbeitspunkte unterhalb der 9HUOXVWOHLVWXQJVK\SHUEHO
P
I C > v max liegen.
U
CE
6FKDOWVWXIHQPLW8QLSRODUWUDQVLVWRU
Von den unipolaren Transistoren haben selbstsperrende FET die größere Bedeutung für integrierte
digitale Schaltungen, da sie nur eine Betriebsspannung benötigen. Den beiden Schalterzuständen
(LQ$XVsind wieder die Zustände TransistorOHLWHQGJHVSHUUWzugeordnet. Die Schaltstrecke ist hier
die Drain-Source-Strecke des FET mit den Kennwerten Drainstrom ID und Drain-Source-Spannung
UDS. Steuergröße ist die Gate-Source-Spannung UGS, die einen Schwellwert UGS0 = UTh erreichen
muß, wenn der FET leitend werden soll (vgl. Abschnitt 1.6).
^ Für UGS < UTh ist bei n-Kanal-FET die DS-Strecke und damit der Transistor gesperrt.
^ Für UGS ≥ UTh wird der FET leitend, es gilt UDS ≤ UGS - UTh (ohmscher Bereich).
Grundsätzlich haben Schaltstufen mit FET und mit Bipolartransistoren die gleiche Grundstruktur
(vgl. Bild 2.2.1). Da FET aber VSDQQXQJVJHVWHXHUWH Bauelemente sind, kann ein Widerstand zur
Erzeugung eines Stromes aus dem Spannungseingangssignal UE, wie für IB bei Bipolartransistoren,
entfallen, d.h., die Eingangsschaltung ist besonders einfach. Der Eingangsstrom IG ist praktisch so
klein, daß man von einer leistungslosen Steuerung sprechen kann.
^ Zur Vermeidung einer elektrostatischen Aufladung der Gate-Source-Kapazität bei offenem
Gateanschluß (Gefahr des Durchbruchs) sollte jedoch immer ein Ableitwiderstand nach
Masse oder Betriebsspannung geschaltet werden (vgl. Abschnitt 4.5).
^ In integrierten FET-Schaltungen wird anstelle eines ohmschen Arbeitswiderstandes RD
typisch ein weiterer FET in den Schaltstufen eingesetzt (vgl. Bild 2.4.2).
2. Elektronische Schalter
5
=XUVWDWLVFKHQ'LPHQVLRQLHUXQJ
Bei der Dimensionierung von Transistorschaltstufen muß einerseits darauf geachtet werden, daß in
den beiden statischen Schaltzuständen EIN und AUS die zulässige statische Verlustleistung PVmax
nicht überschritten wird, andererseits müssen die erforderlichen Spannungs- und Stromwerte für die
Arbeitspunkte am Transistor erreicht werden (vgl. Ausgangskennlinienfeld, Abschnitte 1.5, 1.6).
Dabei kann die gegebene Schaltung mehr oder weniger von der Prinzipschaltung in Bild 2.2.1
abweichen, insbesondere ist die nachfolgende Lastschaltung mit ihren spezifischen Kennwerten und
Forderungen zu berücksichtigen.
Grundsätzlich ist die Verfahrensweise zur Bemessung von Schaltstufen mit bipolaren und
unipolaren Transistoren gleich. FET werden aber in diskreten Digitalschaltungen relativ selten
eingesetzt. Hier werden deshalb nachfolgend nur Schaltstufen mit bipolaren Transistoren betrachtet.
In einer Transistorschaltstufe kann zwischen zwei Gleichstromkreisen, dem (LQJDQJV und dem
$XVJDQJVNUHLV, unterschieden werden (Bild 2.2.2).
^ Die Kenngrößen in diesen beiden Gleichstromkreisen sind voneinander abhängig, also über
den .RSSHONUHLV miteinander verkoppeltBei Schaltern mit bipolaren Transistoren ist das die
Transistorrelation IC = f {IB ; UBE}.
Bei Beachtung der externen Schaltung von Eingangskreis (Ansteuerung Ue, Hilfsspannung UV) und
Ausgangskreis (Lastschaltung RL ) nach Bild 2.2.2 gelten folgende Beziehungen:
^ Eingangskreis:
IB =
U e − U BE
− IV
RB
(2.2.1)
^ Ausgangskreis:
IC =
U CC − U CE
− IL
RC
(2.2.2)
^ Koppelkreis:
I C = B . I B + I CB0 . (1 + B N ) (exp
.
− U CB‘
− 1) .
UT
UCC
Schaltstufe
Ie
IR
RB
Lastschaltung
RC
IB
Ia
IL
U
CE
UL
Iv
Ue
Rv
RL
Uv < 0
Eingangskreis
Ausgangskreis
Bild 2.2.2: Zur statischen Dimensionierung von Transistorschaltstufen
(2.2.3)
6
2. Elektronische Schalter
%HPHVVXQJGHV(LQJDQJVNUHLVHV
Wir setzen zunächst die Werte des Ausgangskreises (RC , IC , UCE , IL, ...) und des Koppelkreises
(Stromverstärkung B) als allgemein gegeben voraus. Die Forderungen an den Eingangskreis für die
beiden statischen Zustände EIN und AUS (Arbeitspunkte) können damit unter Verwendung der o.g.
Grundgleichungen abgeleitet werden.
7UDQVLVWRUJHVlWWLJW (EIN, Index x)
Soll der Transistor für die hohe Eingangsspannung Ue = UeH ≥ UBEx gesättigt werden, so muß
mindestens die Übersteuerungsgrenze (ICü , UCEü) des Schalttransistors erreicht werden. An dieser
Übersteuerungsgrenze gilt UCEü = UBEü ≈ UBEx und ICü = BN . IBü . Für den Basisstrom IBü folgt damit
bei IL = 0
I Bü =
I Cü
U − U CEü
= CC
.
B min
B min R C
(2.2.4)
^ Bmin ist dabei die für den gewählten Arbeitspunkt garantierte Gleichstromverstärkung BN des
Transistors (vgl. Stromverstärkungsgruppen, Abschnitt 1).
Zur Sicherung gegen Störeinflüsse und zur beschleunigten Umschaltung vom Sperrzustand in den
Sättigungszustand wird der Transistor EHUVWHXHUWbzw.JHVlWWLJW, d.h. ihm wird ein m-facher Wert
von IBü als Basisstrom IBX zugeführt (dabei bleibt UBE nahezu konstant und es gilt UBEü ≈ UBEx ):
I BX = m . I Bü = m
U CC − U BEX
.
B min R C
(2.2.5)
I
^ Für den 8EHUVWHXHUXQJVIDNWRU m = IBX werden praktisch Werte von m = 2 ... 10 frei gewählt.
Bü
Dabei ist der Einfluß von m auf das G\QDPLVFKHVerhalten der Schaltstufe, insbesondere auf
die Speicherzeit tS zu beachten (vgl. Abschnitt 1.5).
^ Bei Übersteuerung sinkt die Kollektor-Emitterspannung UCE des Transistors auf die kleine
6lWWLJXQJVVSDQQXQJ UCEX < (100 ... 400) mV ab, während der Kollektorsättigungsstrom ICX
nur relativ geringfügig über den Wert von ICü ansteigt.
Aus dem Eingangsgleichstromkreis läßt sich andererseits ableiten
U eH = I e R B + U BEx = (I Bx + I Vx ) . R B + U BEx mit I Vx =
U BEx − U V
, U V < 0.
RV
(2.2.6)
Daraus folgt für den Basiswiderstand RB die Dimensionierungsvorschrift für gesättigten Transistor
RB =
U eH − U BEx
.
I Bx + I Vx
(2.2.7)
Für den Vorwiderstand RV erhalten wir unter Beachtung der kritischen Toleranzen der Kennwerte
für den Fall JHVlWWLJWHUTransistor die Forderung
R V P R V min = R B
U BEx − U V
U eH − U BEx − I Bx R B
, UV > 0 .
(2.2.8)
2. Elektronische Schalter
7
7UDQVLVWRUJHVSHUUW(AUS, Index y)
Für gesperrten Transistor muß eine Basis-Emitterspannung UBER < UBEy < UBEx realisiert werden. Sie
kann relativ frei gewählt werden, z.B. UBEy = -1 V (UBER - Durchbruchspannung der Basis- EmitterStrecke, typisch -5 V ... - 7 V).
Bei niedrigem Eingangspegel Ue = UeL folgt aus dem Eingangskreis
U eL = I e R B + U BEy = (I By + I Vy ) . R B + U BEy mit I Vy =
U BEy − U V
>> I By .
RV
(2.2.9)
Unter Vernachlässigung des Basisreststromes IBy ≈ 0 erhält man daraus für den Basiswiderstand RB
RB =
U eL − U BEy
R
U BEy − U V V
(2.2.10)
und für den Widerstand RV unter Beachtung der kritischen Bauelementetoleranzen
R V > R v max = R B
U BEy − U V
U eL − U BEy
mit U BEy < 0 .
(2.2.11)
Die nach den o.g. Bemessungsgleichungen ermittelten Widerstandswerte RB und RV entsprechen
i.a. nicht den Normwerten der Widerstandsreihen (E-Reihen, vgl. Abschnitt 1).
Soll bei Verwendung von Normwerten für die Widerstände trotzdem mindestens der gewünschte
Übersteuerungsfaktor m erreicht werden, so muß der Widerstand RB so gewählt werden, daß die
obere Toleranzgrenze den berechneten Wert nicht übersteigt; der Nennwert des Widerstandes RV
darf dann nur im selben Maß wie RB verringert werden.
Die negative Vorspannung UV und damit der Widerstand Rv in Bild 2.2.2 bzw. R2 in Bild 2.2.3 a)
sind dann nötig, wenn der Transistor auch für Low-Werte der Eingangsspannung UeL ≥ UBEx sicher
gesperrt werden soll.
Eine andere schaltungstechnische Lösung zur Erhöhung des maximal zulässigen Low-Pegels UeLmax
ist der Einsatz sogenannter Hubdioden (Bild 2.2.3 b, c). Hier wird Widerstand R2 benötigt, um die
Ladungsträger aus der Basis des Transistors abzuleiten, wenn das Eingangssignal auf Low-Pegel
umschaltet und die Diodenstrecke gesperrt wird.
UCC
UCC
RC
RC
R1
a)
RC
R1
R1 D D
Ue
R2
- Uv
ZD
Ua
Ua
Ue
UCC
b)
R2
Ua
Ue
c)
Bild 2.2.3: Vergrößerung des zulässigen Eingangspegels UeLmax
R2
8
2. Elektronische Schalter
%HPHVVXQJGHV$XVJDQJVNUHLVHV
Bei der Bemessung des Ausgangskreises müssen u.a. auch die Anforderungen der nachgeschalteten
Laststufe berücksichtigt werden. Dabei ist neben dem Betrag auch die 5LFKWXQJ des Laststromes IL
ein wichtiges Kriterium. Nach Bild 2.2.2 gilt
Ia = - IL und Ua = UCE = UL .
(2.2.12)
7UDQVLVWRUJHVSHUUW(AUS, Index y)
Im Arbeitspunkt Y für den Zustand AUS (gesperrter Transistor) gilt für den Kollektorstrom IC
ICy = ICE0 ≈ 0 , ICE0 = (BN + 1) . ICB0 , ICB0 < 20 nA.
(2.2.13)
Abhängig von der nachgeschalteten Laststufe ergibt sich nun die Ausgangsspannung der Schaltung:
^ Ist keine Last angeschaltet, so gilt UaH = UCEy ≈ UCC für ICy ≈ 0.
^ Bei aktiver Last (Bild 2.3.1) gilt ebenfalls UaH = UCEy ≈ UCC für ICy ≈ 0 .
^ Im Fall einer SDVVLYHQ Last RL (Bild 2.2.2, Bild 2.3.1) gilt für ICy = 0
IL =
U CEy
U CC
=
RC + RL
RL
und U aH = U CEy = I L R L =
RL
U .
R C + R L CC
(2.2.14)
7UDQVLVWRUJHVlWWLJW (EIN, Index x)
An der 6lWWLJXQJVbzw.hEHUVWHXHUXQJVJUHQ]H gilt definitionsgemäß UCB’ = 0 bzw. UCEü = UBEü .
Daraus erhalten wir für die Abhängigkeit zwischen Kollektorstrom IC = ICü und Basisstrom IB = IBü
die Koppelbedingung ICsat := ICü = BN . IBü .
Eine weitere Erhöhung des Basisstromes über den Wert IBü hinaus EHUVWHXHUW den Transistor, der
Kollektorsättigungsstrom ICx wird fast völlig von der äußeren Beschaltung (UCC, RC, RL) bestimmt:
I Cx =
U CC − U CEx
U
− CEx ,
RC
RL
I Cü =
U CC − U CEü
U
− CEü
RC
RL
bzw.
(2.2.15)
I Cx = I Cü
+ (U CEü − U CEx ) ( 1 + 1 ) .
RC RL
.
^ Der Kollektor-Sättigungsstrom ICx ist wegen UCEx < UCEÜ << UCC nur geringfügig größer als
der Strom ICü an der Übersteuerungsgrenze.
^ Um den Transistor in diesen Zustand zu steuern, wird eine m-fache Stromerhöhung im
Basiskreis gegenüber der Übersteuerungsgrenze gefordert (IBx = m . IBü).
^ Gleichzeitig sinkt dabei die Ausgangsspannung von UCEü = UBEx = (0,6 ... 1,0) V auf die Restbzw. Sättigungsspannung UCEx < (100 ... 400) mV.
^ Damit ist der Arbeitspunkt X für den übersteuerten Transistor bestimmt (ICx, UCEx ; IBx, UBEx).
Die angegebene Gleichung für den Kollektorstrom ICx zeigt auch den Einfluß der Lastschaltung IL .
Das ist bei aktiven Lastschaltungen wegen der dann umgekehrten Stromrichtung von IL zu beachten
(vgl. dazu Abschnitt 2.3). Der Sättigungszustand des Transistors kann nur aufrecht erhalten werden,
solange der Basisstrom IBx den 6XPPHQVWURP ICx = IR + IL treiben kann. Die entsprechende Anforderung muß bei der Bemessung des Eingangskreises miterfüllt werden.
^ Meist ist eine Bemessungsaufgabe nur im iterativen Verfahren erfolgreich zu lösen !
2. Elektronische Schalter
9
/DVWYHUKDOWHQYRQ7UDQVLVWRUVFKDOWVWXIHQ
6WDWLVFKH/DVWVFKDOWXQJHQ
In Rechnern bzw. allgemein in digitalen Schaltungen werden von einem Schalterausgang mehrere
nachfolgende Eingänge logischer Schaltungen und/oder auch sogenannte V\VWHPIUHPGH Elemente
angesteuert, die ihrerseits als/DVW (-widerstand, -strom) auf die Größe der Ausgangsspannung des
Schalters zurückwirken.
^ Bei Ausgangsbelastung ändert sich i.a. der Pegel der Ausgangsspannung in beiden statischen
Schaltzuständen gegenüber dem unbelasteten Fall.
Beispiele typischer VWDWLVFKHU Lastschaltungen sind in Bild 2.3.1 zusammengestellt. Dabei wird
zwischen DNWLYHQundSDVVLYHQLastschaltungen unterschieden. Der wesentliche Unterschied liegt
in der Stromrichtung bei den logischen Pegeln für die Eingangsspannung UL der Lastschaltungen.
Der ohmsche Arbeitswiderstand RC der Transistorschaltstufe realisiert immer auch die Begrenzung
des Kollektorstromes bei leitendem Transistor (Kurzschlußstrom aus Betriebsspannung) und muß
so dimensioniert werden, daß er vergleichsweise groß gegenüber dem Gleichstromwiderstand rCEX
der leitenden Kollektor-Emitter-Strecke ist.
^ Die Transistorschaltstufe kann bei gesättigtem Transistor mehr Strom aufnehmen als sie bei
gesperrtem Transistor abgeben kann (RC >> rCEX), deshalb werden praktisch vorzugsweise
aktive Lastschaltungen eingesetzt.
U
R
I
Bx
C
I
R
RC
L
U
CEx
BEx
aktiver Schalttransistor
I
Cx
=I +I
L R
CC
IL
I =0 R
B
U
U eH
U
CC
U
UeL
passiver Schalttransistor
CEy
I =I -I
L R Cy
U
R
I
U
L
L
R
C
R
I
I
L
U
L
U
F
U
I
L
L
R
R
L
U
L
CC
U
BE
0V
aktive Lastschaltungen
I Lx = −
U CEy
U CC − U CEx
U − U CEx − U F
; I Lx = − CC
; I Ly =
R
R
R
passive Lastschaltungen
U CEy − U BEx
U CC
=
; I Ly =
R + RC
R
Bild 2.3.1: Statische Laststufen (Index x, y bezieht sich auf Zustand des Schalttransistors)
10
2. Elektronische Schalter
6FKDOWHQNDSD]LWLYHU/DVWHQ
Das dynamische Verhalten einer Transistorschaltstufe wird sowohl von den Transistorkennwerten
(Speicherzeit tS ) als auch stark durch die äußere Schaltung beeinflußt. Infolge der praktisch immer
vorhandenen kapazitiven Belastung des Schalterausganges durch parasitäre, Last- und Eingangskapazitäten nachgeschalteter Schaltstufen sowie durch Leitungen kommt es zu Umladevorgängen
dieser (QHUJLHVSHLFKHU. Das bedeutet aber relativ langsame Zustandsänderungen !
Zu beachten ist außerdem, daß der Transistor beim Einschalten den ggf. großen(QWODGHVWURP i L (t)
aus der Lastkapazität CL aufnehmen muß (Bild 2.3.2).
UCC
RC
r
IR
IB
I
iL
C
CL
Ue
CEx
I Cmax
IC
UC = U CE
I Bx
I Cx
RC
EIN
RC
IR
iL
AUS
IC
UCC
rCEx
I
r
CEy
CL
B
rCEy
I Cy
UCEx
UCEy
UCE
linearisiertes Ausgangs-Kennlinienfeld
Ersatzschaltung
Bild 2.3.2: Ersatzschaltung eines Transistorschalters bei kapazitiver Last
=HLWYHUOlXIH
Wesentliche Eckwerte der Zeitverläufe von Kollektorstrom IC und Kollektor-Emitterspannung UCE
sind näherungsweise (ohne direkten zeitlichen Bezug) dem Ausgangskennlinienfeld zu entnehmen
(Bilder 2.3.2, 2.3.3 a).
(LQVFKDOWYRUJDQJ:
Beim Einschalten des Basisstromes IBy G IBx steigt der Kollektorstrom schnell auf den großen Wert
ICmax und sinkt dann auf den statischen Wert ICx ab. Dabei bleibt die Spannung UCE infolge der
Ladungsspeicherung auf CL zunächst fast konstant (UCEy ≈ UCC ) und baut sich erst langsam ab.
$XVVFKDOWYRUJDQJ:
Beim Ausschalten sperrt der Schalttransistor (IC ≈ 0). Die Spannung UCE bleibt zunächst konstant
(UCEx) und wird dann über RC auf den hohen Wert UCEy ≈ UCC aufgeladen. Reale Ergebnisse erreicht
man über die Analyse der Knotengleichung (IR - IC - iL = 0). Sie liefert mit UCE (t) = UC (t) und der
dU (t)
I-U-Relation einer Kapazität i C (t) = C dtC die 'LIIHUHQWLDOJOHLFKXQJ2UGQXQJ
U CC − U C (t)
U C (t)
d U C (t)
− r CE − C
= 0.
RC
dt
(2.3.1)
2. Elektronische Schalter
11
t
Der Lösungsansatz U C (t) = A + B . e − $ (vgl. Abschnitt 1.7) liefert die Lösung für UCE (t) = UC (t). Es
gilt:
t
R C r CE
U C (t) = A + B . e − $ ; U C () = A, U C (0) = A + B, $ = C
R C + r CE
(2.3.2)
und damit
t
.
U CE (t) = U C (t) = U C () + [U C (0) − U C () ] e − $
bzw.
t 1 = $ . ln
(2.3.3)
U C (0) − U C ()
.
U C (t 1 ) − U C ()
(2.3.4)
(LQVFKDOWYRUJDQJ
UC (0) = UCEy ≈ UCC , UC (∞) = UCEx , τein ≈ C . rCEx ,
$XVVFKDOWYRUJDQJ:
UC (0) = UCEx , UC (∞) = UCEy ≈ UCC , τaus ≈ C . RC .
Für den Zeitlverlauf des Kondensatorstromes iL(t) gilt
i L (t) = −
t
R C + r CE
[U C (0) − U C () ] e − $ .
R C r CE
(2.3.5)
Mit den Definitionen aus der Impulstechnik UCE (t = tr ) = 0,9 . UCC , UCE (t = tf ) = 0,1 . UCC gilt für
die $QVWLHJV]HLW tr (rise time) und die $EIDOO]HLW tf (fall time) der Ausgangsspannung UCE (t)
taus = tr = C RC ln 10 . ( 1- a )
(2.3.6)
tein = tf = C rCEX ln 10 1 1− −10a a
U CEX
<< 1 .
U CC
mit a =
(2.3.7)
^ Die Aufladung des Kondensators über den Widerstand RC >> rCEx dauert um ein Vielfaches
länger als die Entladung über den relativ niederohmigen Widerstand rCEx des Schalters.
^ Dieser Nachteil kann mit *HJHQWDNWVFKDOWVWXIHQ stark reduziert werden (vgl. Abschnitt 2.4).
I
I
C
I
I
I
C
I
max
I
Cx
I
Cy
t
max
Cx
Cy
t
to
U
U
U
CE
U
U
CC
U
CEy
U
CEx
t
a) linearisiertes Zeitverhalten
CE
U
CC
0,9U
CEy
τ ein
τ
t
tr
aus
t
CEx
f
b) reales Zeitverhalten
Bild 2.3.3: Zeitverläufe am Transistorschalter bei kapazitiver Last
CC
12
2. Elektronische Schalter
6FKDOWHQLQGXNWLYHU/DVWHQ
Eine induktive Last, z B. ein Relais, kann in vielen Fällen als Ersatzschaltung aus Induktivität L
und einem ohmschen (Wicklungs- bzw. Kupfer-)Widerstand RL dargestellt werden (Bild 2.3.4).
Für den zeitlichen Verlauf der Kollektor-Emitterspannung UCE (t) gilt dabei allgemein:
U CE (t) = U CC − R L i L (t) − L
di L (t)
.
dt
(2.3.8)
Wichtige Zusammenhänge lassen sich wieder aus dem statischen Ausgangskennlinienfeld ableiten:
^ Beim (LQVFKDOWHQ bleibt der Strom IC = ICy zunächst konstant, die Spannung UCE springt von
UCEy ≈ UCC auf nahezu Null, um danach auf UCEx anzusteigen. Dabei ändert sich der Strom IC
nach einer e-Funktion auf den Wert ICx :
I C (t) =
t
U CC
−
(1 − e $ E ) , $ E = L .
RL
RL
(2.3.9)
^ Beim $XVVFKDOWHQfließt der stationäre Strom ICx zunächst weiter, ehe er auf ICy ≈ 0 abfällt.
Die Spannung UCE steigt auf hohe Werte (theoretisch Icx . rCEY), um danach auf UCEy ≈ UCC
abzuklingen. Zur Vermeidung dieser hohen Spannungen am Transistor (Durchbruch, max.
Verlustleistung) werden 6FKXW]VFKDOWXQJHQ benötigt.
^ Die einfachste und meist verwendete Schutzschaltung ist die sogenannte )UHLODXIGLRGH
Damit wird die Ausgangsspannung auf UCEy ≤ UCC + UF begrenzt (Bild 2.3.4).
UCC
IC
I Cx
RL
D
IL
AUS
UF
Diode
RL
L
IB
UCE
EIN
I Cy
UCE
U
CEx
IC
U
CE
τ
t
E
t
Bild 2.3.4: Transistorschalter mit induktiver Last, zeitliches Verhalten
UCC
2. Elektronische Schalter
13
*HJHQWDNWVFKDOWVWXIHQ
Der Ausgangswiderstand Ra der einfachen Transistorschaltstufe mit Kollektorwiderstand RC hat in
den beiden statischen Schaltzuständen stark unterschiedliche Werte
R aL =
r CEx R C
O r CEx ;
r CEx + R C
R aH =
r CEy R C
O RC
r CEy + R C
(2.4.1)
Das führt bei vielen Anwendungen zu zwei nachteiligen Eigenschaften:
^ unterschiedliche Belastbarkeit Iamax in den beiden Schaltzuständen,
^ der LH-Übergang des Ausgangssignales bei kapazitiver Belastung wird stark verzögert.
Diese Nachteile werden mit Gegentaktschaltstufen (Bild 2.4.1) weitgehend vermieden, da in beiden
Schaltzuständen das Ausgangssignal über einen leitenden Transistor QLHGHURKPLJ zur Verfügung
gestellt wird. Voraussetzung für eine ordnungsgemäße Funktion der Schaltstufen ist dabei, daß die
beiden Ausgangstransistoren im *HJHQWDNWarbeiten.
Die gleichen Aussagen treffen im Prinzip für Schalter mit unipolaren Transistoren zu (Bild 2.4.2).
Eine echte Gegentaktschaltung ist aber nur der CMOS-Inverter (d). In den Schaltungen (b, c) wirkt
der obere Transistor immer als Widerstand.
+U v
R4
U
+U1
R1
T2
R3
e
U
CC
R2
R2
T2
a
T1
e
R1
a
- U1
- Uv
a)
a
D
T1
R2
R3
T3
D
T2
e
CC
0V
b)
T4
R1
vgl. LSL
c)
0V
vgl. TTL
Bild 2.4.1: Gegentaktschaltstufen mit Bipolartransistoren
U DD
UDD
a
a
U DD
UDD
RD
e
e
0V
a)
a
a
e
0V
0V
b)
e
c)
Bild 2.4.2: Schaltstufen mit unipolaren Transistoren
0V
d)
CMOS
14
2. Elektronische Schalter
*HJHQWDNWVFKDOWXQJPLW.RPSOHPHQWlUWUDQVLVWRUHQ
Der Gegentaktschalter mit Komplementärtransistoren (Bild 2.4.1 a) muß so dimensioniert werden,
daß bei leitendem npn-Transistor T1 der pnp-Transistor T2 gesperrt wird und umgekehrt.
Bei Schalterbetrieb sorgt man zweckmäßig dafür, daß für einen Bereich der Eingangsspannung Ue
beide Transistoren sperren (Totzone). Damit wird verhindert, daß im Umschaltbereich gleichzeitig
beide Transistoren leiten (Verlustleistung). Will man auf die beiden Vorspannungen Uv+ und Uvverzichten, so müssen die Widerstände niederohmiger als mit Vorspannungen bemessen werden.
Das führt aber zu einer stärkeren Belastung der Signalquelle Ue und der Versorgungsspannung.
*HJHQWDNWVFKDOWHU(LSL-Stufe)
Der in Bild 2.4.1 b) gezeigte Gegentaktschalter mit zwei npn-Transistoren wird u.a. in integrierten
Schaltkreisen, sogenannten /6/6FKDOWNUHLVHQ eingesetzt (vgl. Abschnitt 4). Bild 2.4.3 zeigt die
wirksamen Teilschaltungen bei aktiver und passiver Last.
U
R1
U CC
CC
R2
R1
T2
T1
e
IB
a
U CC
R2
R1
T2
RL
D
a
e
T1
a
D
UF
RL
Ua
0V
0V
Gesamtschaltung
Ua
0V
passive Last R L
aktive Last RL
U e > U eL max
U e P U eH min
Ua
Bild 2.4.3: LSL-Gegentaktschaltstufe, wirksame Teilschaltungen
Bei passiver Last RL und gesperrtem Transistor T1 ist auch Diode D gesperrt. Transistor T2 arbeitet
als Emitterfolger. Das hohe Ausgangspotential UaH ergibt sich für R2 < RL wie folgt:
UaH = RL IE2 = RL IB2 (1+B)
= R L (B + 1)
mit B - Gleichstromverstärkung des Transistors T2
U CC − U BE2 − U aH
=
R1
U CC − U BE2
.
R1
1+
R L (1 + B)
(2.4.2)
^ Der Ausgangs-High-Pegel UaH dieser Schaltung liegt bei passiver Last RL mindestens um den
Wert einer Diodenflußspannung UBE2 unter dem Wert der Versorgungsspannung UCC .
Bei aktiver Last RL und leitendem Transistor T1 fließt der Laststrom über die Diode D. Der Emitter
von Transistor T2 ist damit um die Diodenflußspannung UF positiver als seine Basis; T2 ist also
gesperrt. Für den Ausgangs-Low-Pegel UaL gilt UaL = UCEx1 + UF bei ICx1 = IR1 + IRL .
^ Der Low-Pegel UaL liegt um eine Diodenflußspannung über der Sättigungsspannung UCEx1.
^ Bei gesperrtem Transistor T1 fließt fast kein Strom in der Schaltung und es gilt UaH = UCC .
2. Elektronische Schalter
15
*HJHQWDNWVFKDOWVWXIHPLWJHJHQSKDVLJHU$QVWHXHUXQJ (TTL-Stufe)
Eine Gegentaktschaltung mit gegenphasiger Ansteuerung der beiden Ausgangstransistoren T3 , T4
zeigt Bild 2.4.4. Sie wird in TTL-Schaltkreisen verwendet (vgl. Abschnitt 4).
UCC
R2
UCC
R3
R2
T3
e
T2
R3
e
T2
a
a
R1
R2
T3
D
D
UCC
T4
0V
Ua
0V
RL
U e ≤ UeLmax
0V
R1
a
T4
U e ≥ UeHmin
Bild 2.4.4: TTL-Gegentaktstufe mit passiver Last, wirksame Teilschaltungen
Für Ue ≤ UeLmax ist der Transistor T2 gesperrt. Transistor T4 erhält keinen Basisstrom und bleibt
ebenfalls gesperrt. Bei passiver ohmscher Last RL arbeitet T3 über die Diode D zusammen mit RL
als Emitterfolger. Für den hohen Ausgangspegel UaH gilt:
UaH = IE3 RL = RLIB3 (1+B)
U aH =
für R2 < RL und damit
U CC − U BE3 − U F
.
R2
1+
R L (1 + B)
(2.4.3)
^ Der Ausgangs-High-Pegel liegt bei passiver Last RL um UBE3 + UF = (1,2 ...1,4) V unter dem
Wert der Betriebsspannung UCC. Bei aktiver Last RL fließt fast kein Strom in der Schaltung
und der Ausgangspegel UaH ist nahezu gleich der Betriebsspannung UCC .
Für Ue ≥ UeHmin werden Transistor T2 und auch Transistor T4 gesättigt. Die Ausgangsspannung wird
damit gleich der Sättigungsspannung von Transistor T4 : UaL = UCEx4 .
Eine Spannungsbilanz zeigt, daß über der Reihenschaltung aus BE-Strecke von Transistor T3 und
Diode D nur eine Spannung von ca. UBEx liegt, so daß Transistor T3 statisch gesperrt ist:
UCEx2 + UBEx4 = UBE3 + UD + UCEx4 .
(2.4.4)
Dynamisch werden allerdings trotz Diode D beide Transistoren T3 und T4 für eine kurze Zeit von
etwa 1 ns ... 5 ns gleichzeitig leitend (Umschaltzeit). Es fließt dann ein relativ großer 4XHUVWURP
von der Betriebsspannung durch die Gegentaktstufe gegen Masse, der zu einer stoßförmigen
Belastung der Betriebsspannung führt. Widerstand R3 begrenzt diesen Querstrom und damit auch
den Kollektorstrom des Transistors T3 bei kleinem passiven Lastwiderstand.
^ Gegenüber der LSL-Gegentaktstufe reagiert das Ausgangssignal der TTL-Stufe schneller auf
eine Änderung des Eingangssignals, da hier die beiden Transistoren T3 , T4 im *HJHQWDNW
vom Schalttransistor T2 angesteuert werden.
16
2. Elektronische Schalter
8QJHVlWWLJWH7UDQVLVWRUVFKDOWHU
Ein schnelles Umschalten des Bipolartransistors vom gesättigten in den gesperrten Zustand wird
von seiner Speicherzeit tS unabhängig von anderen Einflußfaktoren begrenzt. Diese Speicherzeit
steigt mit dem Übersteuerungsgrad m (vgl. Abschnitt 1.5). Schaltungstechnische Lösungen zur
Realisierung ungesättigter bzw. schwach gesättigter Transistorschalter zeigt Bild 2.5.1. Alle
Varianten nutzen eine Diode parallel zur BC-Strecke des Transistors (nichtlineare Gegenkopplung).
Die Diode ist gesperrt und damit wirkungslos, solange UCE > U1 . Für Werte UCE < U1 wird die
Diode zunehmend leitend. Ein Teil des Eingangsstromes wird so an der Basis vorbei zum Kollektor
geführt, der Basisstrom IB steigt bei wachsendem Eingangssignal kaum noch an. Der Widerstand R3
bewirkt eine zusätzliche Pegelverschiebung, ebenso wie eine Hubdiode.
^ Die Spannung UCE wird so auf UCEx ≥ UBEsat - US JHNOHPPW. Besonders wirkungsvoll ist der
Einsatz von 6FKRWWN\'LRGHQwegen ihrer geringen Flußspannung von US = (0,3 ... 0,45) V.
^ Die Ausschaltzeit wird mit dieser Maßnahme praktisch um einen Faktor 10 ... 20 verringert.
e
UCC
Rc
a
R1
U1
R1
e
R3
R2
UCC
Rc
a
UCE
U1
SB
e
R2
UCE
R1
U1
-U v
-U v
UCC
Rc
a
UCE
R2
-U v
Bild 2.5.1: Ungesättigte Transistorschalter
In modernen TTL-Schaltungen (LS-, ALS-, AS- und FAST-Reihe) werden Schottky-Dioden auch
verwendet, um die technologisch bedingten starken Schwankungen der Stromverstärkung B zu
kompensieren und gleichzeitig die Sättigung der Schalttransistoren gering zu halten (Bild 2.5.2).
Ausgehend von einer Stromverstärkung BN des Transistors ohne Diode folgt aus der Strombilanz
für den 6FKRWWN\7UDQVLVWRU eine verringerte Stromverstärkung BS ≤ BN im Sättigungsbereich. Aus
IB = I*B + IF und IC = I*C - IF mit IF = 0 für UCEx ≥ UBEx - UF erhält man
BS =
B N I B − I F
I CX
I
=
= B N − F (1 + B N ) > B N .
I BX
I BX
I BX
UF
I Bx
UBEx
I*B
I
F
(2.5.1)
I*C
I Cx
I Cx
I Cü
I Cü = BN IBü
I*Cx
UCEx
Schaltsymbol
Schottky-Transistor
I Bü
I Bx
IB
Bild 2.5.2: Transistor mit Schottky-Diode als "Sättigungsschutz" (Schottky-Transistor)
3. Logische Elemente und Schaltungen
1
/RJLVFKH(OHPHQWHXQG6FKDOWXQJHQ
Digitale Schaltungen und Systeme bestehen i.a. aus einer großen Anzahl häufig wiederkehrender
Grundelemente, die miteinander verschaltet sind. Diese *DWWHU sind die elementaren Bausteine der
Digitaltechnik. Sie verknüpfen die binären Schaltvariablen nach den Gesetzen der Schaltalgebra
miteinander und werden deshalb nach DIN auch 9HUNQSIXQJVJOLHGHU genannt.
^ Zwischen den binären Ein- und Ausgangsvariablen der Gatter bzw. der gesamten ORJLVFKHQ
Schaltung besteht eine Abhängigkeit, die mit logischen Begriffen wie UND, ODER, NICHT
beschrieben werden kann. Logische Schaltungen realisieren Funktionen der Schaltalgebra.
Logische Schaltungen werden durch einen Schaltplan dargestellt, der die Schaltzeichen der
logischen Grundelemente UND, ODER, NICHT und/oder andere daraus abgeleitete Grundelemente
NAND, NOR, ... enthält (vgl. Tafel 3.1, 3.3).
Bei der praktischen Realisierung logischer Schaltungen (Schaltnetze, Schaltwerke) als elektronische Schaltung werden die binären Variablen meist in Form von Spannungen erzeugt und
verarbeitet. Somit werden auf physikalischer Ebene binäre Schaltvariable mit Hilfe elektronischer
Schalter und Verknüpfungsglieder nach den Gesetzen der Schaltalgebra verknüpft.
Bei der Beschreibung logischer Elemente und Schaltungen müssen neben dem logischen Verhalten
auch die physikalisch-technischen Beschränkungen (Kenn- und Grenzwerte der Bauelemente)
bekannt sein und die Gesetzmäßigkeiten in elektronischen Schaltungen, wie Ohmsches Gesetz,
Kirchhoffsche Sätze usw., berücksichtigt werden.
aktuelle Norm
DIN 40 700
1
NICHT,
NEGATOR
A
NAND (AND)
&
alte DIN - Norm
Y
A
A
≥1
A
=
B
A
ANTIVALENZ
B
IDENTITÄT A
nichtnegierender
Verstärker
A
=1
A
Y
Y
B
A
Y
A
Y
B
≡
B
A
Y
Y
B
Y
B
A
Y
A
A
Y
B
B
ÄQUIVALENZ
Y
Y
B
NOR (OR)
A
USA
≡
A
Y
B
Y
A
Y
Y
Y
B
A
Tafel 3.1: Schaltzeichen elementarer logischer Verknüpfungsglieder
Y
2
3. Logische Elemente und Schaltungen
/RJLVFKH*UXQGIXQNWLRQHQ
Es gibt drei grundlegende Verknüpfungen zwischen logischen Variablen: .RQMXQNWLRQ'LVMXQNWLRQ
und 1HJDWLRQ. Für diese Rechenoperationen gelten eine Reihe von Theoremen und Regeln, von
denen einige in Tafel 3.2 zusammengestellt sind.
^ Konjunktion (UND, AND)
Y = A . B = A B,
^ Disjunktion (ODER, OR)
Y = A + B = A v B,
^ Negation
Y = A.
(NICHT, NOT)
Durch geeignete Kombination dieser Grundfunktionen UND, ODER, NICHT läßt sich jede
logische Funktion realisieren (%DVLVV\VWHP). Darüber hinaus gibt es noch eine Reihe abgeleiteter
Funktionen (NAND, NOR, ...), die sich technisch besser realisieren lassen als die Grundfunktionen
(siehe auch Abschnitt 4).
Kommutatives Gesetz
A·B = B·A
A+B = B+A
Assoziatives Gesetz
A · (B · C) = A · B · (C)
A + (B + C) = (A +B) +C
Distributives Gesetz
A · (B + C) = A · B + A · C
Tautologie
Absorptionsgesetz
Gesetz für die Negation
de Morgansche Regel
Operationen mit 0 und 1
Komplementregel
A + B · C = (A + B) · (A + C)
A·A = A
A+A = A
A · (A+B) = A
A+A·B = A
A A = 0
A+A = 1
A B = A +B
Schnittregel
A·0=0
A·1=A
0 = 1
A +B = A B
Vereinigungsregel
A+0=A
A+1=1
1 = 0
A = A
Tafel 3.2: Theoreme und Regeln der Boole’schen Ausdrucksalgebra
[zur Symbolik : + I (ODER ); · I (UND)]
Zur Darstellung der Zusammenhänge zwischen den Variablen eines logischen Systems finden u.a.
Schaltbelegungstabelle (Schalttabelle, Wertetabelle) und Schaltfunktionen Anwendung.
Eine )XQNWLRQVJOHLFKXQJ beschreibt das Verhalten einer logischen Schaltung (Schaltnetz) mit Hilfe
der Schaltalgebra. Die Abhängigkeit der Ausgangsvariablen von den Eingangsvariablen wird dabei
durch die logischen Operatoren (, , ¯ bzw. auch •, +, ¯ ) entsprechend den Verknüpfungen
UND, ODER, NICHT bewirkt. In Tafel 3.3 sind die möglichen 2 2 n logischen Funktionen von n = 2
Binärvariablen mit Logiksymbol und Kontaktäquivalent angegeben.
In einer YROOVWlQGLJHQ6FKDOWWDEHOOH werden alle möglichen Wertekombinationen der Eingangs- und
Ausgangsvariablen der Funktionsgleichungen dargestellt. Sind für bestimmte Wertekombinationen
der Eingangsvariablen keine Werte für die Ausgangsvariablen festgelegt, so spricht man auch von
einer XQYROOVWlQGLJHQ 6FKDOWWDEHOOH. Gleichgültige Belegungen (don´t care-Belegungen) können
dann wahlweise mit 0 oder 1 gewählt werden (für Minimierungsverfahren interessant).
3. Logische Elemente und Schaltungen
Name
Logiksymbol
y=0
NULL
UND
a
&
a
&
1
y
y=a b
1
y=b
1
Inhibition
y=a b
1
y
y=a
1
y
y = ab ab
1
y
y=ab
1
y=a b
1
y
y = ab ab
1
y
y=a
1
y
y= a b
1
y
y= b
y
b
a
&
y
b
Transfer
(Identität)
Antivalenz
(Exklusiv-ODER)
ODER
a
a
=1
b
a
≥1
b
NOR
a
≥1
y
b
Äquivalenz
Exklusiv-NOR
Negation,
Komplement
Implikation
a
=
b
a
a
1
≥1
Implikation
b
1
a
≥1
a
b
EINS
&
Konstante Null
y
a
b
a
b
y
a und b
y
b aber nicht a
y
b
y
a aber nicht b
y
a
b
a
b
a
a
a oder b, aber nicht
beide
y
b
a
y
b
a
a
genau wenn a, dann b
(a gleich b)
y
b
Nicht a
y
a
a oder b
Nicht - ODER
y
b
y
b
1
y
a
y=ab
1
y
y=ab
1
y=1
1
y
b
wenn a, dann b
Nicht b
b
y
b
NAND
Bemerkung
a
b
Negation
1
y=a b
b
Transfer
(Identität)
Kontaktäquivalent
y
b
Inhibition
Schaltfunktion
3
wenn b, dann a
a
Tafel 3.3: Funktionen von zwei Binärvariablen
y
b
y
Nicht - UND
Konstante Eins
4
3. Logische Elemente und Schaltungen
6LJQDOSHJHOLQORJLVFKHQ6FKDOWXQJHQ
Logische Gatter bzw. Verknüpfungsglieder werden meist als elektronische Schaltung in Form von
LQWHJULHUWHQ 6FKDOWNUHLVHQ auf der Basis von Halbleiterbauelementen realisiert (vgl. Abschnitt 4).
Bei ihrer Herstellung entstehen Teile bzw. sogar die gesamte Schaltung gemeinsam mit den Bauelementen. Gleichzeitig wird die Anzahl der notwendigen Verbindungsleitungen reduziert bzw. es
entstehen Verbindungsleitungen hoher Zuverlässigkeit.
^ Elektronische Schaltungen reagieren auf Spannungen und Ströme an ihren Eingängen (UI , II )
mit ebenfalls Spannungen und Strömen an ihren Ausgängen (UO , IO). Sie YHUVWHKHQ keine
logischen Signalwerte 0 und 1.
^ Die Zweiwertigkeit binärer Signale wird durch den Schalterbetrieb (6FKDOWHU HLQDXV) der
elektronischen Elemente erreicht. Dazu ist u.a. die Festlegung von geeigneten Pegelwerten
für die als Schaltvariable gewählte elektrische Größe (Spannung, Strom) notwendig.
3RVLWLYHXQGQHJDWLYH/RJLN
Logische Gatter in Halbleitertechnik werden mit positiver und/oder negativer Betriebsspannung
betrieben. Sie werden mit binären elektrischen Signalen angesteuert und geben selbst binäre Signale
ab. Bei den meisten technischen Realisierungen ist die logische Binärvariable ein Spannungssignal
und die beiden Werte für diese Binärgrößen liegen innerhalb der Betriebsspannungsgrenzen und
entsprechen jeweils einem ganzen 3HJHOEHUHLFK +(HIGH) oder / (LOW).
Das Verhalten eines Gatters läßt sich somit durch eine 3HJHOWDEHOOH (nach DIN Arbeitstabelle)
beschreiben, die, unabhängig von den konkreten Zahlenwerten für die Spannungspegel und frei von
logischen Zuordnungen, nur die Binärgrößen H und L verwendet.
^ Die logische Funktion einer Schaltung wird aber erst mit einer =XRUGQXQJ zwischen diesen
Pegeln (H, L) und dem logischem Zustand (0, 1) festgelegt (Bild 3.2.1).
^ Die Zuordnung ist willkürlich, wird innerhalb eines Systems aber einheitlich gewählt.
^ Die meisten Schaltkreisfamilien arbeiten mit SRVLWLYHU/RJLN
3RVLWLYH/RJLN
1HJDWLYH/RJLN
e1
e2
a
L
H
L
H
L
L
H
H
L
L
L
H
H
H
+ / __
> 1,
__
> 0,
L
L
__
> 0.
> 1.
__
e1
e2
a
0
1
0
1
0
0
1
1
0
0
0
1
e1
e2
a
1
0
1
0
1
1
0
0
1
1
1
0
Bild 3.2.1: Positive und negative Logik
e1
&
e2
a
81'
e1
≥1
e2
2'(5
a
3. Logische Elemente und Schaltungen
5
3HJHOEHUHLFKHXQGhEHUWUDJXQJVNHQQOLQLH
In digitalen Systemen werden die Verknüpfungsglieder zu mehr oder weniger komplexen logischen
Schaltungen (Schaltsysteme) zusammengeschaltet. Vom Ausgang eines Schaltgliedes werden dabei
i.a. die Eingänge mehrerer anderer Gatter angesteuert. Das Ausgangssignal eines Gatters ist somit
gleichzeitig Eingangssignal mindestens eines nachfolgenden Gatters (Bild 3.2.2).
Auf elektrischer Ebene bedeutet das, daß die Eingänge der angeschlossenen Gatter ihrerseits als
Last (Lastwiderstand, Laststrom) auf die Höhe der Ausgangsspannung zurückwirken. In beiden
Schaltzuständen ändert sich i.a. die Ausgangsspannnung UO der Schaltstufe infolge dieser Last
gegenüber dem unbelasteten Fall (vgl. auch Abschnitt 2).
^ Ursachen für Änderungen der Spannungswerte am Ausgang einer Schaltstufe sind z.B. auch
Exemplarstreuungen und Toleranzen der verwendeten Bauelemente, Schwankungen der
Betriebsspannung, Temperatureinflüsse, Übersprechen zwischen benachbarten Leitungen.
Aus diesem Grund werden relativ große 3HJHOEHUHLFKH eingeführt und den binären Spannungspegeln H und L der Schaltvariablen zugeordnet. Diese Pegelbereiche der Ausgangs- und Eingangsspannung müssen bestimmte Grenzwerte einhalten, damit die logische Zuordnung eindeutig bleibt
(Bild 3.2.2).
1
x1
y1
U I1
x3
1
x2
1
U O1
y3
y2
U I2
U
O2
Betriebsspannung
U
CC
0V
H
H
H
H
U
min
U
IHmin
min
U
ILmax
OHmin
max
L
,1
max
L
L
L
287
,1
287
UOLmax
Pegelbereiche
Bild 3.2.2: Signalbereiche für H- und L-Pegel
Die Pegel der Binärvariablen UH und UL für die Eingangs- und Ausgangsspannung der logischen
Elemente werden u.a. von der Betriebsspannung und entscheidend von der verwendeten
Schaltungstechnik bestimmt. Die Grenzwerte für die beiden Pegelbereiche H und L werden aus der
Übertragungskennlinie UO = f {UI } eines Verknüpfungsgliedes abgeleitet (Bild 3.2.3).
6
3. Logische Elemente und Schaltungen
Eine absolute theoretische Grenze für eine eindeutige Unterscheidung der Pegelbereiche H und L
ist der Arbeitspunkt S mit UOS = UIS (Eingangsschwellspannung).
^ Als Sicherheitsabstand (Störabstand) wird der Übergangsbereich der Übertragungskennlinie
bezogen auf die Eingangsspannung UI gewählt. Ausgangsspannungen U oL < U o < U oH und
Eingangsspannungen U IL < U I < U IH dürfen VWDWLVFK nicht auftreten (verbotener Bereich).
&
4
Uo
UI
H
3
Störabstand
Pegelbereiche für Uo
5
Uo
V
U I = Uo
UCC
2
S
1
RC
L
1
L
2
3
4
H
5
RB
UI
V
UI
Uo
Störabstand
Pegelbereiche für U I
Bild 3.2.3: Zur Festlegung der Pegelbereiche anhand der Übertragungskennlinie
.HQQJU|HQORJLVFKHU6FKDOWXQJHQ
Für einen ordnungsgemäßen Betrieb elektronischer Bauelemente und damit realisierter Schaltungen
müssen vorgegebene Kennwerte und Parameter beachtet und eingehalten werden. Es ist
grundsätzlich zwischen*UHQ]ZHUWHQ und%HWULHEVSDUDPHWHUQ zu unterscheiden.
^ *UHQ]ZHUWH dürfen zu keinem Zeitpunkt überschritten werden, weil sich sonst Defekte bis hin
zur Zerstörung einstellen. Oft sind deshalb neben den rein funktionellen Schaltungselementen
zusätzlich Begrenzerschaltungen notwendig.
^ Für %HWULHEVSDUDPHWHU werden in Datenbüchern häufig minimale, typische und maximale
Werte angegeben. Die typischen Werte sollen dem Anwender die Häufigkeitsverteilung des
Kennwertes andeuten, sie werden aber nicht garantiert.
^ Bei Bemessungsaufgaben muß mit dem NULWLVFKHQ worst-case-Wert der Parameter bzgl. der
geforderten bzw. einzuhaltenden Kennwerte gerechnet werden (vgl. dazu Abschnitt 8.6).
Nachfolgend sind die wichtigsten Kennwerte logischer Schaltungen zusammenfassend dargestellt.
Sie können in ihrer allgemeinen Darstellung auf alle logischen Schaltungen angewendet werden.
Die Zahlenwerte der einzelnen Parameter werden durch die konkrete schaltungstechnische Lösung
(Schaltkreisfamilie, vgl. Abschnitt 4) bestimmt.
3. Logische Elemente und Schaltungen
7
6WDWLVFKH.HQQZHUWH
6SDQQXQJVSHJHO6W|UDEVWDQG
Für jede digitale Schaltkreisfamilie gibt es genau festgelegte Spannungsbereiche für die binären
(logischen) Pegel/ow und +igh der Ein- und Ausgangsspannungen. Die Spannungsbereiche sind
für die Ein- und Ausgangspegel typisch unterschiedlich. Eine besondere Rolle spielt dabei der
sogenannte77/3HJHOals Standard- bzw. Vergleichsgröße (Bild 3.3.1).
Die Differenz der minimalen H-Pegel und der maximalen L-Pegel von Ein- und Ausgangsspannung
ist ein Maß für den VWDWLVFKHQZRUVWFDVH6W|UDEVWDQGSH bzw. SL für Low- bzw. High-Pegel:
SH = UOHmin - UIHmin , SL = UILmax - UOLmax .
^ Der VWDWLVFKH6W|UDEVWDQG gibt die maximal zulässige Spannungsänderung an den Eingängen
eines Gatters an, die den Ausgang noch nicht umschaltet.
Eingang
U
Ausgang
5,0
CC
+
+
U
U
U
OHmin
IHmin
2,7
2,4
2,0
0
/
/
U
OLmax
SH
OUT
IN
SL
verboten
ILmax
U
V
verbotener Bereich
0,8
0,4
0,5
74
IN
OUT
74LS 74ALS 74AS
Bild 3.3.1: Signalpegel und statischer Störabstand (allgemein und bei TTL-Reihen)
(LQJDQJVXQG$XVJDQJVVWU|PH/DVWIDNWRUHQ
Neben den Spannungspegeln spielen auch die Ströme an Ein- und Ausgängen der Schaltstufen eine
wichtige Rolle. Die Werte (und die Richtung) sind i.a. ebenfalls pegelabhängig und werden von der
konkreten schaltungstechnischen Lösung bestimmt.
^ Die maximalen Ausgangsströme IOL max , IOH max geben an, bis zu welcher maximalen6WURPODVW
die Logikpegel L, H der Ausgangsspannung sicher eingehalten werden.
^ Die Summe der Eingangsströme IIL max , IIH max der nachgeschalteten Gatter ist ein Maß für die
Strombelastung der vorgeschalteten Stufe.
^ Alle Stromwerte sind pegelabhängig und in den beiden Schaltzuständen typisch verschieden.
Insbesondere ändert sich auch die Stromrichtung.
Für die Logikpegel gilt damit ergänzend (in Klammern Werte für LS-TTL-Gatter 74 LS 00):
UOL
UOH
UIL
UIH
≤ UOL max
≥ UOH min
≤ UIL max
≥ UIH min
(0,5 V)
(2,7 V)
(0,8 V)
(2,0 V)
für
für
für
für
IOL ≤ IOL max
IOH ≤ IOH max
IIL ≤ IIL max
IIH ≤ IIH max
(8 mA),
(0,4 mA),
(400 µA),
(20 µA).
8
3. Logische Elemente und Schaltungen
6WURPULFKWXQJ
Ein wichtiges Kriterium bei der Zusammenschaltung von Schaltgliedern ist neben den Beträgen
auch die 6WURPULFKWXQJ der Ein- und Ausgangsströme (vgl. auch Abschnitt 8.6). Fließt z.B. bei
L-Pegel am Eingang der Strom IIL aus der Schaltung heraus, so muß der vorgeschaltete Ausgang
diesen Strom aufnehmen können und dabei den geforderten Logikpegel UOL einhalten.
Die Stromrichtungen sind wie die Beträge pegelabhängig und werden von der schaltungstechnischen Lösung bestimmt.
^ Zur einheitlichen Festlegung der Stromrichtung wird eine aus der Verstärkertechnik bekannte
einfache=ZHLWRU(UVDW]VFKDOWXQJ für logische Gatter verwendet (Bild 3.3.2). Ströme werden
danach als positiv bewertet, wenn sie in den Schaltkreis hineinfließen.
Die negative Stromrichtung wird in Datenblättern meist durch ein Vorzeichen am Stromkennwert
angegeben, z.B. -IOH ≤ 400 µA bzw. -IIL ≤ 1,6 mA (vgl. Tafel 4.2.2). Somit fließt bei H-Pegel am
Ausgang der Strom IOH bzw. bei L-Pegel am Eingang der Strom IIL aus dem Schaltkreis heraus.
&
UCC
ra
II
I IL1
IO
I OL
&
UI
re
Ua
UO
I IL2
I IL3
1
≥1
Zweitor
UOL
UOH
UIL
UIH
≤ UOL max
≥ UOH min
≤ UIL max
≥ UIH min
für IOL
für IOH
für IIL
für IIH
≤
≤
≤
≤
IOL max
IOH max
IIL max
IIH max
Strombilanz (Knotensatz):
IOL = IIL1 + IIL2 + IIL3 ≤ IoL max
Bild 3.3.2: Zweitor-Ersatzschaltung für logische Gatter
/DVWIDNWRU
Zur Vereinfachung der "Bemessung" bei der Zusammenschaltung von Schaltgliedern aus HLQHU
Schaltkreisfamilie (speziell TTL-Reihen) werden von den Herstellern /DVWIDNWRUHQ definiert. Sie
geben im Falle des Ausgangslastfaktors FOUT an, wieviel Standard-Eingänge von einem Ausgang
bei Einhaltung der logischen Pegel sicher angesteuert werden können.
^ Der Ausgangslastfaktor FOUT gibt an, wieviel Standardeingänge der JOHLFKHQ Baureihe an den
Ausgang eines Gatters maximal angeschaltet werden dürfen, damit der Spannungspegel
eingehalten wird. Typische Werte sind FOUT = 10 für Standardgatter und FOUT = 30 ... 120 für
Leistungsgatter (Treiber, Buffer).
Werden Bausteine verschiedener Schaltkreisfamilien zusammengeschaltet oder werden sogenannte
systemfremde Bauelemente (Widerstand, Diode, ...) an Schaltkreise angeschlossen, dann leistet
dieser Kennwert wenig. Im allgemeinen ist für jede 6FKQLWWVWHOOH eine Strombilanz aufzustellen und
es sind geeignete ,QWHUIDFH6FKDOWXQJHQ (Pegelanpaßstufen) einzusetzen (vgl. Abschnitt 8).
3. Logische Elemente und Schaltungen
9
$XVJDQJVVWXIHQ
Als Ausgangsstufen logischer Schaltungen werden (LQWDNW und *HJHQWDNWVWXIHQ eingesetzt. Ihre
Eigenschaften bestimmen maßgeblich die statischen und dynamischen (Ausgangs-) Kennwerte der
Logikgatter (vgl. Abschnitt 4).
(LQWDNWVWXIHQgibt es bei TTL-Schaltkreisen in Form der RSHQFROOHFWRU6WXIHQ. Sie werden typisch
als Treiber V\VWHPIUHPGHU Lasten und zur Pegelanpassung eingesetzt. Nachteilig für viele
allgemeine Anwendungen sind das schlechtere Zeitverhalten, verzögerte LH-Flanke, und der immer
notwendige externe Widerstand, dessen Bemessung vom konkreten Lastfall bestimmt wird. Die
OC-Ausgänge verschiedener Schaltkreise können direkt verbunden werden (wired AND).
*HJHQWDNWVWXIHQ zeigen typisch besseres Schaltverhalten, dürfen aber im allgemeinen nicht parallel
geschaltet werden (Kurzschlußstrom !). Die Busfähigkeit wird hier durch 7ULVWDWH6WXIHQ erreicht.
6FKDOW]HLWHQ
Das zeitliche Verhalten digitaler Schaltkreise wird durch Schaltzeiten beschrieben. Es wird dabei
zwischen Flankenzeiten (Anstieg, Abfall) und Verzögerungszeiten unterschieden (Bild 3.3.3).
^ Die 6LJQDOEHUJDQJV]HLWHQ beschreiben die Flankensteilheiten des Ausgangssignales und
werden meist zwischen 10% und 90% der Amplituden für L- und H-Pegel gemessen.
^ Die 6LJQDOODXI]HLW gibt die verzögerte Reaktion des Ausganges auf einen Eingangsimpuls an.
Die Messung wird meist auf die 50%-Marke der Amplituden zwischen dem H- und L-Pegel
bezogen. Die Indexfolge LH bzw. HL bezieht sich auf die verzögerte Ausgangsflanke. Häufig
wird als Kennwert die mittlere Signallaufzeit angegeben
tp =
t pHL + t pLH
.
2
Das Zeitverhalten logischer Schaltkreise wird stark von der wirksamen Lastkapazität CL bestimmt.
Ihr Einfluß läßt sich näherungsweise als Funktion in der Form Tp = Tp0 + KC CL angeben. Faktor KC
kann aus der Kennlinie Tp = f (CL ) in Datenblättern ermittelt werden.
H
90%
10%
t LH - Anstiegszeit
t HL - Abfallzeit
t
LH
t
HL
L
t pLH
H
Eingang
50%
L
H
L
Ausgang
50%
t pHL
L
Bild 3.3.3: Zur Definition der Schaltzeiten (Beispiel Negator)
10
3. Logische Elemente und Schaltungen
9HUOXVWOHLVWXQJ
Jede elektronische Schaltstufe hat in den beiden statischen Schaltzuständen Restströme und Restspannungen (vgl. realer Schalter). Während des Umschaltvorganges müssen außerdem parasitäre
und schaltungstechnisch bedingte Kapazitäten umgeladen werden (Bild 3.3.4).
^ Damit entstehen statische und dynamische Verluste, die 9HUOXVWOHLVWXQJPV = Pvstat + Pvdyn .
6WDWLVFKH9HUOXVWOHLVWXQJ
Die statische Verlustleistung Pvstat ergibt sich aus dem mittleren Versorgungsstrom ICC und der
Betriebsspannung UCC . Die Größe der Speiseströme in den stationären Schaltzuständen wird stark
von der Schaltungsstruktur und -technologie bestimmt:
P v stat =
I CCH + I CCL
U CC .
2
(3.3.1)
'\QDPLVFKH9HUOXVWOHLVWXQJ
Der Hauptanteil der dynamischen Verlustleistung wird durch die Stromimpulse zur Umladung der
Kapazitäten gebildet. Weitere Anteile liefern u.a. auch schaltungstechnisch bedingte Stromimpulse.
Mit steigender Frequenz entsteht zusätzlich zur statischen eine G\QDPLVFKH Verlustleistung Pvdyn,
die direkt von der wirksamen Lastkapazität CL und der Schaltfrequenz f abhängig ist, wie folgende
vereinfachte Rechnung zeigt (Bild 3.3.4:
Bei jeder Änderung des Schaltzustandes am Ausgang wird die Lastkapazität CL mit der LH-Flanke
aufgeladen und mit der HL-Flanke wieder entladen. In einer Schaltperiode T = 1f fließt damit eine
Ladung Q = CL . (UOH - UOL) von der Betriebsspannung nach Masse ab. Dieser Ladungstransport
entspricht einem mittleren Speisestrom ICCm = f . CL . (UOH - UOL) je Schaltperiode T und damit einer
mittleren G\QDPLVFKHQ Leistungsaufnahme aus der Betriebsspannung von
Pvdyn = ICCm . U CC = CL . f . (UOH - UOL ) . UCC .
(3.3.2)
^ Die dynamische Verlustleistung logischer Gatter ist proportional zur Schaltfrequenz f und
wegen (UOH - UOL) ~ UCC näherungsweise zum 4XDGUDW der Betriebsspannung UCC . Hieraus
läßt sich u.a. auch der Trend zur sogenannten 3 V -Technik begründen.
^ Oft wird von den Herstellern eine maximal zulässige Lastkapazität CLmax angegeben. Sie
sollte in keinem Fall überschritten werden, da sonst die Ausfallwahrscheinlichkeit ansteigt.
UCC
I
&
C
St
UCC
CC
I OUT
CL
1
C
CLtg I
wirksame Lastkapazität CLast = CL + C Ltg + CI
Bild 3.3.4: Kapazitive Last und dynamische Verlustleistung
CSt
3. Logische Elemente und Schaltungen
11
6FKDOWXQJVWHFKQLVFKH5HDOLVLHUXQJHOHNWURQLVFKHU9HUNQSIXQJVJOLHGHU
Zur technischen Realisierung elektronischer logischer 9HUNQSIXQJVJOLHGHU gibt es eine Vielzahl
schaltungstechnischer Möglichkeiten, die sich in ihren Kenngrößen (z. B. Betriebsspannung, Pegelwerte, Schaltgeschwindigkeit, Ausgangsbelastbarkeit, ...) z. T. erheblich unterscheiden.
Bei der Erklärung der Teilschaltungen ist zu beachten, daß zu ihrer Funktion eine positive und/oder
negative Betriebsspannung benötigt wird (aktive Schaltungen). Logische Schaltung werden mit
Binärsignalen angesteuert und geben selbst binäre Signale ab. Die Binärsignale für die Eingangsund Ausgangsgangsgrößen werden typisch durch massebezogene Spannungen repräsentiert, liegen
innerhalb der Betriebsspannungsgrenzen und entsprechen jeweils einem 3HJHOEHUHLFK H oder L.
^ Um eine geeignete Auswahl bzw. eine Einschätzung bzgl. der Leistungsfähigkeit treffen zu
können, sollte man wenigstens einen groben Überblick über den prinzipiellen Aufbau dieser
Schaltungen und der damit verbundenen Kennwerte und Eigenschaften haben.
^ In vielen Fällen reichen bereits einfachste Ersatzschaltungen aus, um die Schaltungen bezgl.
Ihres .OHPPHQYHUKDOWHQV zu analysieren und zu bemessen (vgl. auch Abschnitt 8.6).
6FKDOWXQJHQLQ.RQWDNWWHFKQLN
Schaltungen in Kontakttechnik sind in ihrer Bedeutung zweifellos zurückgegangen, finden aber in
der Schützensteuerung bzw. in der Haustechnik auch heute noch Anwendung. Ein Schütz ist ein
Starkstromrelais, dessen Magnetspule für den Anschluß an 220 V-Wechselspannung ausgelegt ist.
^ Eine wesentliche Eigenschaft von Schaltungen in Kontakttechnik ist die absolute JDOYDQLVFKH
7UHQQXQJ von Steuer- und Leistungskreis.
Die Grundschaltungen zur Realisierung logischer Ausdrücke lassen sich relativ einfach aus den
Kontaktanordnungen in Tafel 3.3 ableiten. Dazu werden die Eingangsvariablen x1 , x2 auf je ein
Schütz gelegt (Bild 3.4.1). Eine Seite der Kontaktanordnungen wird an Potential "1" (z. B. +UCC)
gelegt, die andere Seite über einen Widerstand R an Masse (0 V). An dieser Seite kann über den
Widerstand R die logische Funktion y in Form der Ausgangsspannung Ua abgenommen werden.
Bild 3.4.1 zeigt beispielhaft Schaltungen in Kontakttechnik für die logischen Grundelemente UND,
ODER und NICHT in positiver Logik, aus denen sich weitere Logikelemente ableiten lassen.
+U CC
+UCC
x1
x
1
X1
x
x1
x2
2
x
y
X2
R
0V
UND y = x1• x2
Ua
+UCC
x2
x
1
X1
x
x
2
y
X2
R
0V
ODER y = x1 + x2
Bild 3.4.1: Logische Grundschaltungen in Kontakttechnik
y
Ua
X
R
0V
NICHT y = x
Ua
12
3. Logische Elemente und Schaltungen
'LRGHQXQG7UDQVLVWRUVFKDOWXQJHQ
Zur Realisierung der elementaren UND- bzw. ODER-Verknüpfung logischer Signale können
Schaltungen mit Dioden und/oder Transistoren genutzt werden. Abgeleitete Grundfunktionen
(NAND, NOR, ... ) können daraus durch zusätzliche Negation realisiert werden.
Nachfolgend werden Prinzipschaltungen zur Realisierung der UND- und ODER-Verknüpfung von
mehreren Binärvariablen angegeben. Die 1HJDWLRQ wird durch Transistorschalter (vgl. Abschnitt 2)
realisiert und mit den Verknüpfungsschaltungen kombiniert, um die verschiedenen logischen
Glieder mit/ohne Negation zu erzeugen.
'LRGHQVFKDOWXQJHQ
Bild 3.4.2 zeigt die grundlegenden Diodenschaltungen zur Realisierung der logischen UND- bzw.
ODER-Verknüpfung binärer Signale.
UCC
R
IR
e1
U
CC
Ua
UND
ODER
UCC
a
e2
D1
a
D2
e2
e1
D2
UND
Ua
D1
R
Ua
ODER
U
S
UCC
US
Übertragungskennlinien
U e1
Bild 3.4.2: UND- und ODER-Gatter als Diodenschaltung
Liegt an mindestens einem Eingang der UND-Schaltung tiefes Potential L (z.B. Ue1 = 0), so ist die
betreffende Diode D1 leitend. Die Ausgangsspannung Ua nimmt den Wert der Diodenflußspannung
an (UaL = UF1 = US). Hohes Ausgangspotential stellt sich in der Schaltung nur dann ein, wenn beide
Eingänge gleichzeitig auf hohem Potential liegen und somit beide Dioden gesperrt sind.
Bei passiver Last RL muß durch %HPHVVXQJ des Widerstandes R der minimale H-Pegel am Ausgang
gesichert werden
R
U aH = R + LR U CC P U aH min .
L
^ Bei der UND-Schaltung bestimmt der Eingang mit dem niedrigsten Pegel den Ausgangspegel
(Minimumschaltung). In der ODER-Schaltung dagegen setzt sich die Eingangsspannung mit
dem höchsten Pegel durch und bestimmt die Ausgangsgröße (Maximumschaltung).
Bei der Dimensionierung von Diodenschaltungen zur Verknüpfung logischer Signale muß ein gutes
Verhältnis der wirksamen Widerstände (Schalter ein/aus) erreicht werden. Dazu ist Widerstand R
allgemein nach RF < R < RSp zu bemessen (RF , RSp - Durchlaß- bzw. Sperrwiderstand der Diode).
Sind keine Einschränkungen gegeben, so gilt R O R F . R Sp als ein guter Richtwert.
3. Logische Elemente und Schaltungen
13
Eine Erweiterung der Anzahl der Eingänge gelingt durch Anschalten zusätzlicher Dioden. Dabei
wird die zulässige Anzahl von Eingängen ggf. durch die temperaturabhängigen 6SHUUVWU|PH der
Dioden begrenzt (bei Si-Dioden Verdopplung des Stromwertes je 7°- 8° K Temperaturerhöhung).
Bei Kettenschaltungen von Dioden-Schaltstufen werden die Logikpegel am Ausgang zunehmend
verfälscht (vgl. Übertragungskennlinien in Bild 3.4.2).
^ Bei UND-Gattern steigt der Ausgangs-L-Pegel mit jeder Stufe um eine Diodenflußspannung
an (gestörter L-Pegel). Bei ODER-Gliedern sinkt der Ausgangs-H-Pegel der Schaltung mit
jeder Stufe um eine Diodenflußspannung UF = US (gestörter H-Pegel).
^ Das wird in Schaltstufen mit zusätzlichen Transistorschaltern (Bild 3.4.3) vermieden; hier
R
wird der Ausgangspegel immer wieder regeneriert (U OL = U CEX , U OH O R +LR U CC ).
C
L
UCC
R
Ue1
RC
D3
D1 I
I
1 R
T
IB
Ue2
R
R
U1
D2 I 2
IR
U
1
L
I{U F }
I
I{U F + U BE }
I RL
Uo
I 1L
IB
I1
UCC
U CC
R
I Bx
UF
Ue1 = 0
I =
R
I RH
UCC - U 1
R
I By
UBE
U1L
U1H
UCC
U1
Bild 3.4.3: NAND-Schaltung, Ersatzschaltung und Kennlinie
Führt mindestens ein Eingang L-Pegel, z.B. Ue1 = UeL bei Ue2 = UeH, so ist die Diode D1 leitend und
es fließt der Strom I1L = IR L - IBy + IS2 (IS - Dioden-Sperrstrom).
Wegen der steilen Kennlinie I1 = f {UF1} ist die Spannung U1 fast unabhängig von der parallelen
UBE- Strecke IB = f {UF3 + UBE} und wird auf den Wert U1L = UeL + UF1 geklemmt.
Die Strecke (UD3 + UBE) und somit der Transistor T sind gesperrt. Für den Eingangs-L-Strom I1L
gilt:
I 1L O I RL =
U CC − U 1L U CC − U F − U eL
=
R
R
mit I By O 0, I S2 O 0 .
Bei hohen Eingangsspannungen Ue1 = Ue2 = UeH sind beide Dioden D1, D2 gesperrt. Transistor T
steuert durch (IRH + 2 IS = IBx ) und die Spannung U1 wird auf U1H = UF3 + UBEX festgehalten.
U
−U
^ Der Strom I R = CC R 1 ist so in beiden Schaltzuständen nahezu gleich und wird abhängig
vom Eingangspegel entweder über die Strecke (D1, Ue1; D2, Ue2) oder über Strecke (D3, BE)
nach Masse geschaltet (6WURPVFKDOWHUSULQ]LS).
^ Für die Spannung U1 erfolgt eine Minimumauswahl U1 = min [(Ue + UF1 ); (UBEX + UF3 )].
14
3. Logische Elemente und Schaltungen
7UDQVLVWRUVFKDOWXQJHQ
Werden die Dioden in der Grundschaltung für das ODER-Glied in Bild 3.4.4 durch Transistoren
mit kurzgeschlossener Basis-Kollektor-Strecke ersetzt, so sind das logische XQG elektrische
Verhalten von Dioden- und Transistorschaltung fast identisch (BE-Diode).
UCC
e1
e1
e2
e2
e2
a
a
0V
e1
UDD
R
R
e1
e2
a
a
0V
R
0V
R
0V
Bild 3.4.4: ODER-Schaltungen für positive Eingangssignale /7/
Schaltet man die Kollektoren jedoch an Betriebsspannung, so ändert sich das HOHNWULVFKHVerhalten:
Die Transistoren arbeiten jetzt als (PLWWHUIROJHU, es wird ein großer Eingangswiderstand Rein und
ein kleiner Ausgangswiderstand Raus der Schaltung erreicht (Raus O R , Rein O r BE + . R ).
^ Die Eingänge dieser Verknüpfungsglieder mit Transistoren belasten damit eine vorgeschaltete
Stufe weniger als bei den Diodenschaltungen, da nur der vergleichsweise kleine Basisstrom
der Transistoren von den Signalgebern Ue1 und Ue2 aufgebracht werden muß.
^ Der relativ große Ausgangsstrom wird nicht von der Eingangssignalquelle, sondern von der
Betriebsspannung aufgebracht (Ausgangsbelastbarkeit).
UND- und ODER-Schaltungen mit Transistoren können in 3DUDOOHOWHFKQLN und in 5HLKHQWHFKQLN
realisiert werden. Einander entsprechende logische Verknüpfungen können sowohl bipolare als
auch unipolare Transistoren verwenden (Bilder 3.4.4 und 3.4.5).
UCC
UCC
R
R
e1
U DD
Rv
a
e1
e2
U CC
a
e1
e2
e2
e1
Rv
a
0V
0V
0V
R
e2
a
0V
R
Bild 3.4.5: UND-Schaltungen für positive Eingangssignale /7/
Die Reihenschaltung von bipolaren Transistoren wird selten angewendet. Bei der Ansteuerung des
oberen Transistors mit L-Pegel und der unteren Transistoren mit H-Pegel fließen deren Basisströme
über den Widerstand R und verfälschen den L-Pegel des Ausgangssignales.
3. Logische Elemente und Schaltungen
15
=XP(QWZXUIORJLVFKHU6FKDOWXQJHQ
(QWZXUIVGDUVWHOOXQJXQGYHULILNDWLRQ
Für den Entwurf komplexer Systeme stehen zunehmend immer leistungsfähigere Verfahren und
Werkzeuge zur Verfügung. Diese &$(:HUN]HXJH (CAE - Computer Aided Engineering) bieten in
Verbindung mit Bauteilbibliotheken vielfältige Verifikations- und Testmöglichkeiten im gesamten
Entwurfsprozeß ohne physikalische Realisierung (YLUWXHOOHV/DERU).
Der Aufbau von Versuchsschaltungen aus Standardelementen, die Verifikation und Optimierung
von Teilschaltungen ist wegen der Komplexität der Gesamtsysteme sowie aus Zeit- und
Kostengründen nicht mehr zeitgemäß. Der Entwurf komplexer Systemfunktionen und deren relativ
kostspielige Realisierung "in Silicium" erfordert zunehmend eine systematische Entwurfsmethodik.
Ein Entwurf muß bereits YRU seiner Hardwarerealisierung möglichst weitgehend getestet und
optimiert werden. Dabei müssen auch die physikalisch-technischen Beschränkungen der späteren
Realisierung (Parameter, Grenzwerte, Restriktionen, ...) berücksichtigt werden.
^ Für effektive Lösungen muß ein Entwickler u.a. über Kenntnisse der Schaltungstechnik, der
Schaltkreistechnologien, der Entwurfswerkzeuge und deren Möglichkeiten verfügen.
Zur Darstellung der formalen Zusammenhänge beim Entwurf elektronischer Schaltungen und
Systeme wurde 1983 von Gajski/Kuhn das sogenannte <'LDJUDPP eingeführt. Es unterscheidet
zwischen 5 Entwurfsebenen, die als konzentrische Kreise dargestellt werden (Bild 3.5.1):
^ Architekturebene, Algorithmische Ebene, Funktionale Ebene, Logische und Schaltkreisebene.
9HUKDOWHQ
6WUXNWXU
Architektur
Algorithmisch
Leistungsanforderungen
CPU, Speicher
Funktional
Algorithmen
Register Transfer
Hardware Module
Logik
ALU, MUX, Register
Boole’sche Gleichungen
Gatter, Flipflops
Schaltkreis
Differentialgleichungen
Transistoren
Polygone
Plazierung
von Zellen
Floorplan
Cluster
Geometrische
Partitionierung
*HRPHWULH
Bild 3.5.1: Y-Diagramm zur Darstellung der Entwurfsebenen
16
3. Logische Elemente und Schaltungen
Der schalenförmige Aufbau des Y-Diagramms entspricht dem Hierarchiekonzept des Entwurfs,
wobei das Abstraktionsniveau bzgl. der realen technischen Lösung von innen nach außen wächst.
Jeder Entwurfsschritt in einer Ebene kann durch eine Komponente sowohl im Verhaltensbereich
als auch im Schaltungsstrukturbereich bzw. im Geometriebereich dargestellt werden.
9HUKDOWHQVEHUHLFK
Im Verhaltensbereich werden z.B. Aussagen über das elektrische, das logische und das zeitliche
Verhalten getroffen. Die Beschreibung erfolgt mit Kennwerten aus Datenblättern, Ablaufplänen
und Zeitdiagrammen und wird schrittweise verfeinert. Der Abstraktionsgrad der verwendeten
Modelle muß dem der aktuellen Entwurfsebene angepaßt sein (Bilder 3.5.2 und 3.5.3).
Zu den gebräuchlichen Werkzeugen in den oberen Ebenen des Verhaltensbereiches zählen die
^ 5HJLVWHUWUDQVIHUEHVFKUHLEXQJ (Datenfluß zwischen Logikfunktionen) und
^ +DUGZDUH%HVFKUHLEXQJVVSUDFKHQ auf algorithmischer Ebene.
In den unteren Ebenen wird das Verhalten durch Simulatoren und Analyseprogramme ermittelt
(Circuit- und Logiksimulatoren, z.B. SPICE, LOG/iC, QUICKSIM).
6FKDOWXQJVVWUXNWXUEHUHLFK
Im Strukturbereich werden Schaltungen durch Komponenten und Verbindungselemente in Form
von Netzlisten, durch Blockschaltbilder und logische Schaltpläne beschrieben. Einige Beispiele für
die Komponenten in den verschiedenen Ebenen sind Bild 3.5.1 zu entnehmen.
*HRPHWULHEHUHLFK
Die Geometrie beschreibt die physikalische Implementierung einer Schaltung, z.B. die Plazierung
der Systemkomponenten auf dem Chip. Für die Arbeiten im Geometriebereich werden LayoutEditoren, Plazierungs- und Routing-Werkzeuge, Design-Rule-Checker u.a. benötigt. Dieser Bereich
wird hier nicht näher betrachtet, entsprechende Angaben sind der Literatur zu entnehmen /12/.
UCC
R2
R1
-- ***** nand_gate model *****
-- external ports
ENTITY nand_gate IS
PORT (a,b: IN BIT; y: OUT BIT);
END nand_gate;
R3
T3
A
B
T1
D
T2
-- internal Behavior
ARCHITECTURE behavioral OF nand_gate IS
BEGIN
y < = a NAND b AFTER 5 ns;
END behavioral;
Y
R
GND
T4
4
a) Schaltung TTL - Gatter 7400
A
c) NAND-Gatter in VHDL-Beschreibung
Beschreibung:
&
Y
B
b) NAND-Gatter als Makrozelle
Y=AB
oder
A B
Y
0
0
1
1
1
1
1
0
0
1
0
1
Bild 3.5.2: Modelle eines TTL-NAND-Gatters für verschiedene Entwurfsebenen
3. Logische Elemente und Schaltungen
17
(QWZXUIVVFKULWWH
Mit CAE-Werkzeugen wird zunächst die symbolische Schaltungsstruktur bis auf die Gatterebene
aufgelöst und die Logikfunktion verifiziert. Bei einem Fehlverhalten der Schaltung wird der
Entwurf erneut verifiziert, wieder bis auf Gatterniveau aufgelöst und simuliert. Nach erfolgreicher
Verifikation wird die komplette Schaltung erstellt (Bottom-Up-Entwurfsmethode).
Mit der Bereitstellung von +DUGZDUH%HVFKUHLEXQJVVSUDFKHQ (Hardware Description Language),
wird zunehmend die algorithmische Beschreibungsebene Ausgangspunkt für den Entwurfsprozeß
logischer Systeme. Grundsätzlich ist damit ein Top-Down-Entwurf von der Verhaltensbeschreibung
bis zum Layout realisierbar.
Ein wesentliches Ziel dieser Entwurfsmethodik ist es, nach einem streng hierarchischen Konzept
Module schrittweise in Submodule aufzuteilen, die ihrerseits in Hardware realisiert werden können.
Dabei können teilweise aus der Softwaretechnik bekannte Prinzipien übernommen werden, z.B.
strukturierte Programmierung. Die wesentlichen Unterschiede gegenüber dem Softwareentwurf
bestehen darin, daß beim Hardwareentwurf die physikalisch-technischen Beschränkungen einer
späteren Realisierung (Parameterbereiche, Restriktionen, Gültigkeitsbereiche, ...) schon in dieser
Konzipierungsphase berücksichtigt werden müssen und daß die Vielfalt der möglichen Elemente
für die Realisierung im Vergleich zu Softwareaufgaben wesentlich größer ist.
Das gilt insbesondere für sogenannte "Mixed-Mode-Applikationen", also für gemischt analogdigitale Systeme. Hier ist die Vielfalt von analogen Elementarschaltungen fast unüberschaubar.
Zusätzliche Probleme entstehen durch die unterschiedlichen Beschreibungsformen für digitale und
analoge Systeme (Boole'sche Gleichungen, Differentialgleichungen, ...). Die geeignete Definition
der Schnittstellen zwischen digitalen und analogen Subsystemen ist gegenwärtig ein Ziel weltweiter
Forschungs- und Normungsarbeiten.
UCC
R
R2
1
S
R3
&
&
&
&
&
R
T3
A
B
T
GND
1
C
D
T
2
Y
R
T
4
4
a) Schaltung TTL - Gatter 7400
S
74 LS 74
D
D S Q
C
C
RQ
Q
Q
Q
R
c) D-Flipflop als Makrozelle
D
&
b) D-Flipflop aus Logikgattern
# If CLKRISE then
# If xS = 1 and xR = 1 then
#
If D = 0 then
#
Q = 0, xQ = 1
#
else
#
Q = 1, xQ = 0
# else . . .
# else . . .
d) D-Flipflop als Hochsprach-Prozedur
Bild 3.5.3: Abstraktionsgrade eines D-Flipflops für unterschiedliche Entwurfsebenen /12/
Q
18
3. Logische Elemente und Schaltungen
6LPXODWLRQVDUWHQ
Wichtigstes Werkzeug zur Schaltungsverifikation ist die 6LPXODWLRQ. Simulation bedeutet Analyse
und Modifikation am Modell. Aufwand und erreichbare Ergebnisse hängen in starkem Maße von
den Modellen und ihrer Verknüpfung sowie den gewählten Analyseverfahren ab.
Für den richtigen Einsatz ist u.a. ein gutes Grundverständnis über die Arbeitsweise der Simulatoren
notwendig. Hier wird ein kurzer Überblick über die verschiedenen Simulationsarten und ihren
Einsatzbereich gegeben. Simulationsarten im Geometriebereich werden nicht beschrieben.
&LUFXLW6LPXODWLRQ
Ein Circuit-Simulator, z.B. PSPICE, kann als ein virtuelles Meßgerät aufgefaßt werden, das alle
Möglichkeiten praktischer Labormeßgeräte wie z.B. Voltmeter, Amperemeter, Oszilloskop und
Spektrumanalysator in sich vereint und teilweise übertrifft.
^ Jede beliebige Stelle und Größe einer Schaltung ist für dieses "Software-Meßgerät"
erreichbar.
Voraussetzung dafür ist, daß die Modelle das reale elektrische Verhalten der Bauelemente und
Teilschaltungen nachbilden. Meist werden Schaltungsmodelle auf Transistorebene oder erweiterte
Zweitorschaltungen als Makromodelle verwendet. Als Analyseverfahren wird oft das modifizierte
Knotenspannungsverfahren (MNA - Modified Nodal Analysis) eingesetzt.
^ Besonders für die Simulation analoger Schaltungen ist dieser Weg typisch.
Aufwand und Zeitbedarf für die Analyse können durch einfachere Modelle und/oder Verzicht auf
Genauigkeit in der zeitlichen Auflösung entscheidend verringert werden. Wichtig sind auch solche
Faktoren wie die Formulierung der Netzwerkgleichungen, Zeitdiskretisierung, Linearisierung der
Modellparameter und die Schrittweitensteuerung im Lösungsalgorithmus. Sie können allerdings
vom Anwender kaum beeinflußt werden.
Bei komplexen Systemen und Schaltungen entsteht bei Circuit-Simulation leicht ein praktisch nicht
mehr beherrschbar großer Aufwand (Netzwerkmodelle, Anzahl der Netzwerkgleichungen).
Andererseits genügt in digitalen Systemen häufig eine 0-1-X-Darstellung der Signale (Bild 3.5.4)
und es können deshalb viel einfachere Verfahren und Modelle zur Analyse des Verhaltens digitaler
Schaltungen verwendet werden (vgl. Switch-Level-Simulation, Logiksimulation).
U(t)
Analogsignal
(zeit- und wertkontinuierlich)
t
U(t)
0
X
1
X
Digitalsignal
(0/1/X-Darstellung)
0
t
X
X
Bild 3.5.4: Darstellungsformen analoger und digitaler Signale zur Simulation
3. Logische Elemente und Schaltungen
19
6ZLWFK/HYHO6LPXODWLRQ
Eine 6ZLWFK/HYHO6LPXODWLRQ ist eine näherungsweise Schaltungssimulation auf der Basis von
vereinfachten Modellen der Schaltungselemente. So wird z.B. ein (MOS-)Transistor durch einen
gesteuerten Leitwert dargestellt, der nur noch vorgegebene diskrete Werte annehmen kann. Im
einfachsten Fall wird der Transistor durch die diskreten Werte RON / ROFF beschrieben. Typisch wird
dabei eine Vereinfachung der Analyse bei oft drastischer Reduktion der Rechenzeit im Vergleich
zur Circuit-Simulation erreicht.
/RJLN6LPXODWLRQ
Mit einem Logikanalysator kann man eine reale Hardware auf ihre logischen Zustände untersuchen.
Bei der /RJLNVLPXODWLRQ dagegen wird eine logische Schaltung auf der 0RGHOOHEHQH analysiert
(Software-Meßgerät). Dabei wird jedes Schaltungselement durch sein logisches Verhalten in Form
von Boole'schen Gleichungen, Funktions- bzw. Wahrheitstabellen, Schaltbildern auf Gatterebene,
von Verhaltensmodellen (z.B. VHDL-Prozedur) o.a. beschrieben.
Aus dem logischen Verhalten der Einzelkomponenten ergibt sich der Zustand der Ausgangssignale
bei gegebener Eingangserregung (Stimulus). Ändert eine Teilschaltung ihren Zustand, so wird das
in eine sogenannte "Event Queue" (Ereignis-Schlange) eingetragen. Der Simulator ermittelt über
die Fan-Out-Liste des Schaltelementes die von dieser Zustandsänderung betroffenen Nachfolger
und arbeitet die "Event Queue" solange ab, bis die Schaltung "ruhig" ist. Sofort anschließend wird
die nächste Ereignisänderung bearbeitet (Bild 3.5.5).
NA2
&
B
INV
B
A
A
NA1
&
C
t d1
t d2
C
E1
E2
E3
Ändert sich das Eingangssignal A innerhalb der Verzögerungszeit td1 bzw.
das Signal B innerhalb der Zeit td2 , so kommt es zur Ausbildung von Spikes
Bild 3.5.5: Ereignisfortpflanzung in logischen Schaltungen, Entstehung von "Spikes"
+LVWRU\VSHLFKHU
Die zu simulierende Schaltung wird in einem Designfile abgespeichert. In einem weiteren Speicher
werden die Signalzustände aller Knoten bis zu einer einstellbaren Speichertiefe (+LVWRU\VSHLFKHU)
abgelegt, während vom grafischen Ausgabeprozessor nur die für die Ausgabe ausgewählten Signale
weiterverarbeitet werden. Die logischen Signale an den einzelnen Teilschaltungen nehmen nur die
diskreten Werte 0/1/X an.
20
3. Logische Elemente und Schaltungen
=HLWPRGHOO
Die Fortpflanzung eines Ereignisses kann durch Lauf- und Verzögerungszeiten zusätzlich verzögert
werden (=HLWPRGHOO). So wird z.B. das zeitlich verzögerte Auftreten der Ausgangsänderung bei
Logikgattern oft durch die Angabe der minimalen, typischen und maximalen Verzögerungszeit
beschrieben. Bei komplexen Funktionselementen (Makromodelle) ist die Erstellung eines Zeitmodells eine wichtige und komplizierte Aufgabe.
6SLNHV
Typische Fehler in Logikschaltungen sind Spikes infolge von Hazards und Races; sie werden bei
der Logiksimulation ermittelt und extra angegeben.
6SLNHV
treten an Ausgängen von Schaltstufen auf, wenn sich Eingangsbelegungen innerhalb der
Verzögerungszeit (delay time) des Schaltelementes ändern (Bild 3.5.5).
+D]DUGV treten z.B. auf, wenn sich Eingangssignale eines Gatters "gleichzeitig" in entgegengesetzter Richtung ändern (Bild 3.5.6). In der Folge können Spikes auftreten.
5DFHV
treten typisch in asynchroner Logik auf, z.B. wenn sich infolge von Laufzeiteffekten
Rückführsignale "gleichzeitig" ändern und die Reihenfolge des Eintreffens Einfluß auf
das Schaltverhalten hat. Es werden kritische und unkritische Races unterschieden.
In synchronen Systemen werden Races vermieden.
A
A
&
&
D
&
C
B
A
B
C
E
A
B
B
D
C
C
E
Bild 3.5.6: Zur Entstehung von Hazards
0L[HG0RGH6LPXODWLRQ
Zur Simulation gemischt-analog/digitaler Schaltungen werden spezielle 0L[HG0RGH6LPXODWRUHQ
benötigt. Mit reiner Logiksimulation können hier kaum verwertbare Ergebnisse erzielt werden,
andererseits ist eine Circuit-Simulation zu aufwendig. Diese Simulatoren zerlegen (partitionieren)
die Gesamtschaltung in analoge und digitale Teilschaltungen und simulieren diese getrennt mit
Circuit- bzw. Logiksimulator. An den Schnittstellen zwischen analogen und digitalen Teilsystemen
muß eine geeignete Signalumsetzung erfolgen (Digital-Analog- bzw. Analog-Digital-Umsetzung).
Analoge Signale werden meist in ein digitales Signal mit 0/1/X-Darstellung nach Bild 3.5.4
gewandelt. Die Art und Weise der Signalumsetzung an den Schnittstellen und die verwendeten
Modelle bestimmen wesentlich die Leistungsfähigkeit des Simulators und damit das Ergebnis der
Simulation. Aktuelle Mixed-Mode-Simulatoren sind z.B. die VHDL-AMS-Simulatoren K$PVWHU
der Firma Ansoft und $'9DQFH06 von Mentor Graphics.
4. Digitale Schaltkreisfamilien
1
'LJLWDOH6FKDOWNUHLVIDPLOLHQ
Die Verarbeitung digitaler Signale erfordert immer komplexere Schaltungen mit stetig wachsenden
Anforderungen an deren funktionelle Leistungsfähigkeit (Gatter, Zähler,... , Rechner). Prinzipiell
lassen sie sich auf die bekannten logischen Grundschaltungen zurückführen. Dabei nutzt jede
Schaltkreisfamilie ein bestimmtes Grundgatter mit entsprechender Funktion (z.B. NAND-Gatter).
Im Laufe der Zeit wurden verschiedene digitale Schaltkreisfamilien entwickelt (Tafel 4.1), die sich
in ihren Schaltungskonzepten und in der Folge damit auch in den Kennwerten oft erheblich
unterscheiden. Diese Entwicklung ist einerseits historisch (Stand der Halbleitertechnologie,...) und
andererseits durch die unterschiedlichen Anforderungen der Anwender und die Einsatzbedingungen
begründet. Solche allgemeinen Forderungen sind z.B. hohe Störsicherheit, große Ausgangsströme,
kleine Eingangsströme/hohe Eingangswiderstände, geringe Verlustleistung, kleine Schalt- und
Verzögerungszeiten, hoher Integrationsgrad.
Integrierte digitale Schaltungen
Bipolarschaltungen
MOS - Schaltungen
Übersteuerungstechnik nicht übersteuerte Technik
statische Schaltungstechnik
(gesättigter Schalttransistor)
(nichtgesättigter Schalttransistor)
77/
677/
(Transistor-Transistor-Logik)
(Schottky-TTL)
,/
(Integrierte Injektionslogik)
(LQNDQDO026
(n-MOS, p-MOS)
(&/
&026
(emittergekoppelte Logik)
(complementary MOS)
%,&026
*D$60(6)(7
Tafel 4.1: Digitale integrierte Schaltkreisfamilien
%LSRODUVFKDOWXQJHQ
Bei hEHUVWHXHUXQJVWHFKQLN arbeitet der eingeschaltete Transistor im Sättigungsbereich und besitzt
damit eine nicht vernachlässigbare Speicherzeit. Bei 6WURPVFKDOWWHFKQLN wird der Transistor im
aktiven Bereich betrieben, so daß keine Speicherzeit auftritt (ECL-Schaltkreise).
In 6FKRWWN\77/-Schaltkreisen wird zumindest eine starke Übersteuerung durch den Einsatz von
Schottky-Transistoren und zusätzliche spezielle Antisättigungsschaltungen vermieden.
0266FKDOWXQJHQ
MOS-Schaltkreise werden stets nach dem Übersteuerungsprinzip realisiert. Eine Speicherzeit wie
beim Bipolartransistor tritt bei FET nicht auf, deshalb führt die Vermeidung der Übersteuerung bei
FET nicht zu vergleichbaren Ergebnissen. Der Einsatz neuer Ausgangsmaterialien (z. B. GaAs
anstelle Si) bringt bei nahezu gleichen Schaltungskonzepten höhere Schaltgeschwindigkeiten.
Nachfolgend werden die aktuellen Schaltkreisfamilien mit ihren typischen Grundschaltungen und
Kennwerten angegeben. Dabei wird den TTL- und CMOS-Familien relativ breiter Raum gewidmet.
Sie werden auch in den nächsten Jahren noch praktische Bedeutung haben, wobei sich insbesondere
der Anteil von CMOS-Schaltungen (Leistungsverbrauch) und Schaltkreisen mit Mischtechnologien
(BICMOS) weiter erhöhen wird.
2
4. Digitale Schaltkreisfamilien
'LRGHQ7UDQVLVWRUORJLN'7/'=7/
'7/Schaltungen verwenden zur Verknüpfung der Eingangssignale typisch eine UND-Schaltung
mit Dioden, der eine Negationsstufe mit Transistor nachgeschaltet wird. Damit ergibt sich der
Grundbaustein mit der logischen Funktion 1$1' (Bild 4.1.1).
^ Zur Erhöhung der Störsicherheit werden zusätzlich sogenannte +XEGLRGHQ eingesetzt. Die
Eingangsspannung UeH muß nun mindestens den Wert der Hubspannung erreichen, damit der
Transistor leitet, der statische Störabstand wird also vergrößert (vgl. Abschnitt 3.3).
Ucc
Ucc
R
R
Rc
e1
Rc
a
e1
a
e2
e2
0V
0V
Bild 4.1.1: DTL-NAND-Schaltungen
Eine größere Pegelverschiebung wird mit mehreren Dioden in Reihenschaltung bzw. mit einer
Z-Diode erreicht (Z-Spannung). Man spricht dann von '=7/Logikschaltungen (Bild 4.1.2).
Allerdings führt der Einsatz von Z-Dioden anstelle von Schaltdioden zu größeren Schaltzeiten, weil
der Übergang vom Durchbruch- in den Sperrbereich bei Z-Dioden relativ langsam erfolgt.
^ Dieses Schaltungskonzept wird deshalb auchODQJVDPHVW|UVLFKHUH/RJLN(LSL)genannt.
LSL-Schaltungen werden in der Industrieelektronik / Peripherie zur Leistungselektronik verwendet,
wo zugunsten einer erhöhten Störsicherheit oft auf Geschwindigkeit verzichtet werden kann.
Typisch sind vergleichsweise große Werte für die Betriebsspannung UCC ≥ +12 V und damit auch
für die typischen Logikpegel 7,5 V ≤ UeH ≤ UCC , 0 V ≤ UeL ≤ 4,5 V.
e
1
e
2
e
3
e
4
e
5
10 k
1k
9,1k
Ucc
390
UOH
≥ 12 V
UOL
≤ 1,7 V
IIH
≤ 1,0 µA
IIL
≤ 1,8 mA
Verzögerungszeit
tDlH /tDHL
≤ 310 µs
Flankendauer
tLH / tHL
570 / 210 µs
Ausgangsspannung
Eingangsstrom
a
6,8k
2,2k
0V
Bild 4.1.2: LSL-NAND-Schaltung mit Gegentaktausgangsstufe (FZH 125, Siemens)
4. Digitale Schaltkreisfamilien
3
77/6FKDOWNUHLVH
hEHUEOLFN
Die TTL-Schaltkreisfamilie ist international am weitesten ausgebaut und wird von zahlreichen
Herstellern produziert. Die Schaltkreise verschiedener Hersteller sind elektrisch und konstruktiv
NRPSDWLEHO(austauschbar). Die große Bedeutung der TTL-Familie ist auch daraus ersichtlich, daß
die Pegelwerte anderer Schaltungsfamilien häufig in Bezug auf die entsprechenden TTL-Kennwerte
angegeben werden. Man spricht in diesem Zusammenhang von 77/.RPSDWLELOLWlW
Das typische TTL-NAND-Gatter bestimmt die wesentlichen Eigenschaften der gesamten Baureihe.
Infolge unterschiedlicher Schaltungsauslegung und Bemessung der Elemente unterscheiden sich die
einzelnen Baureihen insbesondere in der Schaltzeit und im Leistungsverbrauch (Tafel 4.2.1).
Praktisch haben heute die TTL-Reihen LS, FAST, ALS, AS die größte Bedeutung.
TTL-Reihe
Familienbezeichnung
Einf.
Jahr
tD / ns
Standard
74
63
10
Low-Power
74 L
63
High-Speed
74 H
Schottky
fmax / MHz
Pv / mW
(je Gatter)
tD • PV / pJ
35
10
100
33
3
1
33
63
6
50
22
132
74 S
69
3
125
19
57
Low-Power-Schottky
74 LS
71
9
45
2
18
FAST*
74 F
79
2,3
100
3,5
8
ALS
74 ALS
80
4
70
1
4
AS
74 AS
82
1,7
200
8,5
14,5
*Fairchild Advanced Schottky TTL
fmax - max. Zählfrequenz von Flipflops
Tafel 4.2.1: Überblick über TTL-Reihen
6FKDOWXQJGHV1$1'*DWWHUV
Grundbaustein der TTL-Reihen ist ein NAND-Gatter. Seine Schaltung und seine elektrischen
Eigenschaften (Schaltpegel, Laufzeit, Leistungsverbrauch, Ausgangsströme, ... ) sind für die ganze
Baureihe charakteristisch. Bild 4.2.1 zeigt die Transistor-Schaltung des TTL-NAND-Gatters 7400
der Standardreihe 74 und eine Dioden-Ersatzschaltung der Eingangsstufe.
Ucc
R1
4k
e1
e2
R2
1,6 k
C1
T1
T2
R4
1k
R3
130
T3
a
4
0V
R1
R1
D
T
U cc
Ucc
C1
e1
e2
e2
R
0V
C1
e1
R
0V
Bild 4.2.1: TTL-NAND-Gatter 7400, Schaltung und Dioden-ESB der Eingangsstufe
4
4. Digitale Schaltkreisfamilien
Das NAND-Gatter der TTL-Standardreihe 74 hat zwei charakteristische Schaltungsmerkmale:
^ 0XOWL(PLWWHU(LQJDQJVWUDQVLVWRU zur Verknüpfung der Eingangssignale,
^ *HJHQWDNWDXVJDQJVVWXIH.
Die Funktionsweise des NAND-Gatters 7400 wird anhand der wirksamen Teilschaltungen für Lund H-Zustand am Eingang e bzw. am Ausgang a erklärt (Bild 4.2.2). Der für die TTL-StandardReihe typische 0XOWLHPLWWHU7UDQVLVWRU in der Eingangsstufe kann dabei ersatzweise als Diodenschaltung aufgefaßt werden.
Ucc
Ucc
I IH
R1
e1
B
R1
R2
T2
I OL
e2
a
T4
0V
e1
R4
UOL
IL
R3
T3
D
B
e2
I
R2
I
0V
a
OH
UOH
Bild 4.2.2: Wirksame Teilschaltungen des NAND-Gatters 7400 für H- bzw. L-Pegel
Bei Low-Pegel an mindestens einem Eingang e1, e2 fließt über die BE-Strecke (Diode) von T1 ein
Eingangsstrom IIL aus der Schaltung heraus:
I IL =
U CC − U BEX − U eL
R1
.
(4.2.1)
Transistor T1 ist leitend, seine CE-Strecke also niederohmig (UCE < UBEX ). Mit der HL-Flanke am
Eingang wird gleichzeitig die Basisladung von Transistor T2 abgeführt und dieser damit gesperrt.
Im Vergleich zu DTL-Schaltungen werden somit kürzere Schaltzeiten erreicht. Bei gesperrtem
Transistor T2 ist auch Transistor T4 gesperrt. Gleichzeitig erhält Transistor T3 über R2 Basisstrom
und wird leitend; am Ausgang a stellt sich H-Pegel UOH ein.
Für Ue1 > UBEF (bei Ue2 = UeH) beginnt ein Strom über die Basis-Kollektor-Diode von T1 zu fließen
und T2 wird zunehmend leitend. Bei Ue1 P (UBE2x + UBE4x ) steuert dann schließlich auch T4 durch.
Dieser Wert wird deshalb auch als 8PVFKDOWVSDQQXQJ US ≈ 2 . UBEx des Gatters bezeichnet. Am
Ausgang a stellt sich Low-Pegel UOL = UCE4x ein. Gleichzeitig wird Transistor T3 sicher gesperrt,
da die Flußspannung der Diode D zusätzlich sein Emitterpotential anhebt (UBE3 ≈ UBEx - UF ).
Transistor T1 wird jetzt LQYHUVbetrieben, d.h. ab dieser Eingangsspannung U e P U S kehrt sich die
5LFKWXQJ des Eingangsstromes um. Es fließt ein Strom IIH im µA-Bereich in die Schaltung hinein
(entspricht Diodensperrströmen in der Diodenersatzschaltung).
^ Die *HJHQWDNWDXVJDQJVVWXIH hat in beiden Schaltzuständen bzw. für beide Impulsflanken
einen niederohmigen Ausgangswiderstand (ca. 12 Ω für HL-Flanke, 120 Ω für LH-Flanke).
^ Damit können kapazitive Lasten schnell umgeladen bzw. kapazitiv eingekoppelte Störungen
unterdrückt werden (vgl. auch Abschnitte 2, 11).
4. Digitale Schaltkreisfamilien
5
Für den praktischen Umgang mit der Gegentaktausgangsstufe ist zu beachten:
^ Die TTL-Ausgangsspannungspegel UOH , UOL werden nur dann sicher eingehalten, wenn der
]XOlVVLJHLaststrom nicht überschritten wird (vgl. TTL-Kennwerte, Tafel 4.2.2).
^ BeiV\WHPIUHPGHQLastenkann der Ausgangsstrom IO ggf. höher sein, allerdings wird für die
Ausgangsspannung der Logikpegel nicht mehr garantiert.
^ TTL-Gegentakt-Ausgangsstufen dürfen i.a. QLFKW parallel geschaltet werden, da die Gefahr
der Zerstörung besteht.
Wird z.B. ein Ausgang auf L und ein zweiter Ausgang auf H gesteuert (Bild 4.2.3), so fließt
praktisch ein Kurzschlußstrom IOK > IOL in der Schaltung. Das entspricht etwa dem Zustand, daß in
einem Gatter gleichzeitig beide Transistoren der Gegentaktstufe leitend sind. Der Basisstrom IB4x
des leitenden Transistors reicht nicht mehr aus, um bei diesem Kollektorstrom den Transistor T4 in
Sättigung zu halten. Die Spannung der CE-Strecke steigt auf Werte UCE = U O > UOL und in der
Folge steigt auch die Verlustleistung am Transistor.
Ausnahmen:
^ Zwei Gatter eines Schaltkreises dürfen zur Erhöhung des Lastfaktors ein- XQG ausgangsseitig
parallelgeschaltet werden /3/.
^ Gatterausgänge mit Tristate-Verhalten (vgl. Abschnitt 4.2.4).
UCC
R4
I
B3x
IC
I B4x
I OK
I OK
I OL
I B4x
OUT
GND
T
4
UOL U*
O
UCC
UCE
Bild 4.2.3: Zur Parallelschaltung von TTL-Gegentakt-Ausgangsstufen
77/6FKDOWXQJHQPLWRIIHQHP.ROOHNWRU
Werden Eintaktausgangsstufen zusammengeschaltet, so sinkt der wirksame Kollektorwiderstand
R C = R1 || R2 in Bild 4.2.4 leicht auf unzulässig kleine Werte für den Fall eines einzelnen leitenden
Ausgangstransistors. Der Ausweg aus dieser Situation besteht in der Verwendung der Schaltstufen
mit HLQHP gemeinsamen Widerstand RC, dessen Bemessung dem jeweiligen Fall angepaßt wird
(durch den Anwender).
Zur Ansteuerung V\VWHPIUHPGHU /DVWHQ, z.B. Anzeigeeinheiten, LED, Optokoppler, Kleinrelais
oder Schaltungen mit größerer Betriebsspannung werden TTL-Schaltkreise mit RIIHQHP.ROOHNWRU
(OC-Gatter, open-collector) angeboten (Bild 4.2.5).
Zur Sicherung der Logikpegel muß stets ein H[WHUQHU Widerstand RC eingesetzt und entsprechend
bemessen werden. Dabei arbeitet der Ausgangstransistor immer im sogenannten SXOOGRZQ%HWULHE
Er verbindet bei gesättigtem Transistor den Ausgang niederohmig mit Masse und hält ihn im
gesperrten Zustand hochohmig.
6
4. Digitale Schaltkreisfamilien
Ucc
R1
I a1
Y1
A
Ucc
R
2
Ucc
U1
a
X
1
U2
a
IE
Y = Y1Y2
X2
:
:
Y2
B
Ua1
Rc
Ua = min (U 1, U2)
Ua
Xn
Bild 4.2.4: Parallelschaltung von Eintakt-Ausgangsstufen
Zu beachten ist, daß bei der Zusammenschaltung mehrerer OC-Ausgänge eine zusätzliche logische
Verknüpfung ZLUHG$1' (verdrahtetes UND) der Einzelausgänge entsteht Y = Y 1 Y 2 ... Y n .
Bei der Zusammenschaltung von n Ausgängen erhält man die Bemessung von RC z.B. aus den
Knotengleichungen für L- bzw. H-Pegel am Ausgang. Es gilt:
U aH − U CC
+ n . I aZH + I EH = 0 ,
RC
(4.2.2)
U aL − U CC
+ I aL1 + (n − 1)I aZL − I EL = 0 .
RC
(4.2.3)
^ Die Stromrichtung von IEL und IEH ist unterschiedlich; IaLZ , IaLH sind die Restströme gesperrter
Ausgänge bei Low-/High-Pegel an Ausgang a.
Unter Beachtung der kritischen Größen der Parameter in den Schaltzuständen folgt daraus:
UaHmin ≤ UCCmin - RCmax (n I aZHmax + I EHmax ),
IaLmax ≤ U CC max − U aL max
- (n-1)IaLZmmin + IELmax .
R C min
(4.2.4)
(4.2.5)
Werden an Ausgang a außerdem m Eingänge logischer Schaltungen (Empfänger) angeschlossen, so
bestimmt auch ihre Anzahl m die Bemessung von RC mit (IE = I I = f {m}). Werden gleichartige
Schaltungen der Empfänger vorausgesetzt werden, so folgt für den zulässigen Wertebereich des
Widerstandes R C min > R C > R C max (vgl. Abschnitt 8.6):
U CC min − U aH min
U CC max − U aL max
.
> RC >
n I aZH max + m I IH max
I aL max − m (−I IL max ) + (n − 1)I aLZ min
(4.2.6)
4. Digitale Schaltkreisfamilien
UCC
UCC
R1
7
RC
R2
&
e
1
e2
T2
T1
O
T4
≥1
&
&
Ua
R4
GND
Bild 4.2.5: TTL-NAND-Gatter mit offenem Kollektor (7403)
Nachteilig für viele Anwendungen ist das relativ schlechte dynamische Verhalten.
^ Die Schaltzeiten von Gattern mit OC-Ausgang, insbesondere die Flankenanstiegszeit tLH, sind
wesentlich größer als bei Gattern mit Gegentaktstufe (RC ≥ 330 Ω , vgl. Abschnitt 2.4).
Der Kollektorwiderstand RC
^ Sichert bei hochohmigen OC-Ausgängen (gesperrte Transistoren) die Eingangsspannung UIH
für angeschlossene Logikeingänge,
^ begrenzt bei leitendem Ausgangstransistor den Ausgangsstrom IOL auf den für HLQHQ leitenden
Transistor zulässigen Wert I OLmax bei Einhaltung des Logikpegels UOL ≤ UOLmax .
77/6FKDOWXQJHQPLW7ULVWDWH$XVJlQJHQ
Speziell zur Anwendung in Bussystemen werden Schaltkreise mit sogenannten7ULVWDWH$XVJlQJHQ
angeboten (dritter Ausgangszustand Z __> Ausgang hochohmig). Tristate-Ausgänge sind vor allem
bei Leitungs- und Bustreibern sowie bei höherintegrierten Schaltkreisen (Multiplexer, Speicher, ...)
zu finden. Es wird ein zusätzliches Steuersignal OE für jeden Ausgang benötigt.
^ Bei aktivem OE-Signal nimmt der zugeordnete Ausgang Y unabhängig von der Belegung an
den anderen Eingängen den hochohmigen Zustand Y = Z an. Dabei sind beide Transistoren
der Gegentaktstufe gleichzeitig gesperrt.
Der wesentliche Vorteil dieser Schaltkreise mit Tristate-Ausgangsstufe ist, daß die dynamischen
Eigenschaften der Gegentaktstufe in den beiden "normalen" Schaltzuständen H und L erhalten
bleiben XQG trotzdem die Ausgänge mehrerer Teilnehmer auf eine Sammelleitung %86 geschaltet
werden können (Parallelschaltung der Ausgänge).
^ Um den Ausgang KRFKRKPLJ zu schalten (Zustand Y = Z), wird für jeden Ausgang ein
zusätzliches 6WHXHUVLJQDO OE (output enabled) benötigt. Wird OE aktiv, so werden beide
Transistoren der Gegentaktausgangsstufe gesperrt. Der Ausgang wird so gleich- und wechselstrommäßig nach UCC und Masse hochohmig, d.h. praktisch abgetrennt (disabled).
^ Dabei muß die Steuerung der OE-Signale der verschiedenen Teilnehmer am Busverkehr so
ausgelegt werden, daß höchstensHLQAusgang am Bus aktiv (H oder L) wird und alle anderen
Ausgänge im Tristate-Zustand sind. Sind mehrere Ausgänge gleichzeitig aktiv, kommt es zur
verbotenen Parallelschaltung von "normalen" Gegentaktstufen.
8
4. Digitale Schaltkreisfamilien
Einfache Prinzipschaltungen zur Tristate-Steuerung eines TTL-Gatters zeigt Bild 4.2.6.
U CC
U CC
R1
OE
DS
T1
A
B
R2
T2
R3
R1
T3
D
Y
T4
R4
A
B
OE
R2
DS
T3
D
T2
T1
Y
T4
T5
R4
0V
0V
OE
A
&
Y
B
Schaltsymbol
R3
A
B
OE
Y
L
L
H
H
L
H
L
H
L
L
L
L
H
H
H
L
x
x
H
Z
Bild 4.2.6: TTL-NAND-Gatter mit Tristate-Ausgang
Unterschiede gegenüber OC-Ausgängen:
^ keine zusätzliche logische Verknüpfung, keine zusätzlichen externen Elemente,
^ kleinerer Ausgangswiderstand bei H-Pegel und LH-Flanke am Ausgang, damit schnellere
Aufladung von kapazitiven Lasten.
Die Anzahl der an eine Busleitung anschaltbaren TS-Ausgänge ist begrenzt (vgl. Abschnitt 8.6). Im
VWDWLVFKHQ Fall wird diese Begrenzung u.a. durch die Restströme IOZL der gesperrten Ausgänge
bestimmt, sie belasten den aktivierten Ausgang zusätzlich (IOZL ≈ 20 µA bei Treiber-IS 74 LS 126).
Eine G\QDPLVFKH Begrenzung bildet die wirksame Lastkapazität CL, die wesentlich durch die
Eingangskapazitäten der angeschlossenen Eingänge (Ce > 2 pF je Eingang) und die Ausgangskapazitäten Ca der parallelen Ausgänge bestimmt wird. Typisch werden die Verzögerungszeiten td
der Schaltkreise bei CL = 15 pF angegeben.
77/6FKDOWXQJHQPLW6FKRWWN\7UDQVLVWRUHQ 677/
Standard-TTL-Schaltungen besitzen aus heutiger Sicht große Schaltzeiten infolge der gesättigten
Schalttransistoren und eine hohe Verlustleistung [ td = 10 ns; Pv = ( 10 ... 15 ) mW / Gatter]. Einen
entscheidenden Fortschritt brachte der Einsatz von Schottky-Transistoren mit stark reduzierten
Speicherzeiten (vgl. Abschnitt 2.5).
In Verbindung mit verschiedenen schaltungstechnischen Modifikationen der Eingangsstufe zur
Verringerung der Eingangsströme, u.a. logische Verknüpfung mit Dioden statt Multiemitter, wurde
so die Low-Power-Schottky-TTL-Familie74 LS für viele Jahre zum Marktstandard.
Die Weiterentwicklung führte inzwischen zu den STTL-Familien 74 ALS und 74 AS von 7H[DV
,QVWUXPHQWV und zur FAST-Reihe74 F von )DLUFKLOG1DWLRQDO6HPLFRQGXFWRUV6LJQHWLFV
4. Digitale Schaltkreisfamilien
9
Die wichtigsten Schaltungsunterschiede zur Standard-Reihe 74 sind Bild 4.2.7 zu entnehmen:
^ Einsatz von Schottky-Transistoren (ungesättigte Logik),
^ Schutzdioden an Ein- (und Ausgängen) gegen negative Störspannungen,
^ verschiedene Ausführungen der Eingangsstufe, damit teilweise unterschiedliche Kennwerte.
UCC
8k
20k
UCC
120
15k
40k
50
60k
A
A
4k
4k
Y
B
Y
12k
B
3k
1,5k
3k
6k
GND
GND
NAND-Gatter 74 ALS 00
NAND-Gatter 74 LS 00
Bild 4.2.7: Innenschaltungen von Schottky-TTL-Schaltkreisen
Die unterschiedlichen Kennwerte ergeben sich u.a aus den Eingangsschaltungen (Bild 4.2.8). Die
erhöhte Durchbruchspannung UBR bei Dioden im Eingangskreis ermöglicht u. U. eine vereinfachte
Anpassung an Schaltungen mit höheren Schaltpegeln (vgl. auch Abschnitt 8).
T
1
T3
D1
Multi-Emitter
U CC − U BE1
R1
T2
I IL =
D3
0V
DTL
U CC − U FD1
R1
T2
T3
T3
0V
D1
R1
T1
D2
T2
T2
0V
I IL =
R1
D1
R1
R1
Dioden-Cluster
I IL =
U CC − U FD1
R1
D2
0V
PNP- Transistor
I IL =
U CC − U BE1
(1 + B) R 1
US = 2UBE
US = 2UBE - UF
US = 2UBE
US = 2UBE
UBR = 8 V
UBR < 15 V
UBR< 15 V
UBR = 8 V
CIN = 3,5 pF
CIN = 5,5 pF
CIN = 3,5 pF
CIN = 4 pF
Bild 4.2.8: Eingangsschaltungen und -parameter von LS-TTL-Schaltkreisen
T3
10
4. Digitale Schaltkreisfamilien
.HQQZHUWHYRQ77/6FKDOWXQJHQ
6LJQDOSHJHOXQGVWDWLVFKHU6W|UDEVWDQG
Den Signalpegeln L und H sind bei TTL-Eingängen und -ausgängen unterschiedliche Bereiche
zugeordnet. Die Werte der Standardreihe 74 gelten mit spezifischen Modifikationen für alle
TTL-Reihen (vgl. Tafel 4.2.2) und werden allgemein 77/3HJHO genannt. Mit den Definitionen aus
Abschnitt 3 ergibt sich damit für die Standardreihe 74 in beiden logischen Zuständen ein statischer
(worst-case-) Störabstand von SH = SL = 0,4 V.
Eingang Ausgang
U
CC
H
U
5,0 V
H
UOHmin
UIHmin
2,7
2,4
2,0
verboten
U
ILmax
L
0
L
UOLmax
IN
S
0,8
0,4
OUT
SH
L
verbotener Bereich
IN
OUT
0,5
74
74LS
74ALS
74AS
Bild 4.2.9: Signalpegel bei TTL-Reihen
(LQJDQJVXQG$XVJDQJVVWU|PH
Bei der Zusammenschaltung von TTL-Schaltkreisen stellen die angeschalteten Eingänge eine
Strombelastung für den treibenden Ausgang dar (Bild 4.2.10). Dabei ist neben der Stromgröße auch
die Stromrichtung ein wichtiges Kriterium (vgl. Abschnitte 3 und 8.6).
^ Die Signalpegel werden eingehalten, solange die zulässigen Eingangs- und Ausgangsströme
nicht überschritten werden (Tafel 4.2.2). Die Anzahl von Eingängen, die ein Ausgang sicher
WUHLEHQ kann, ergibt sich aus der Strombilanz (Lastfaktor). Für Standard-TTL gilt
IIL ≤ 1,6 mA, IOL ≤ 16 mA; IIH ≤ 40 µA, I OH ≤ 400 µA __> Ausgangslastfaktor FLout = 10.
130
UCC
4k
UCC
4k
I
I
OH
I IH
IL
I OL
Bild 4.2.10: Ein- und Ausgangsströme bei Zusammenschaltung von TTL-Gegentaktstufen
4. Digitale Schaltkreisfamilien
Kennwerte
bei UCC = 5V und
= 25 C
Eingangsspannung
UIL
11
TTL-Baureihen
7400
74LS00
74ALS00
74F00
max
0,8 V
0,8 V
0,8 V
0,8 V
UIH
min
2,0 V
2,0 V
2,0 V
2,0 V
UOL
max
0,4 V
0,5 V
0,5 V
0,5 V
UOH
min
2,4 V
2,7 V
2,7 V
2,4 V
Schwellspannung *
US
min
1,1 V
1,1 V
1,4 V
Eingangsstrom
-I IL
max
1,6 mA
0,4 mA
0,2 mA
0,6 mA
0,04 mA
0,02 mA
0,02 mA
0,02 mA
16 mA
8 mA
8 mA
20 mA
0,4 mA
0,4 mA
0,4 mA
1,0 mA
0,2/0,4 mA
0,1/0,2 mA
Ausgangsspannung
o
bei UIL = UOLmax
max
IIH
bei UIH = UOHmin
Ausgangsstrom
max
IOL
bei UOL = UOLmax
-IOH
max
bei UOH = UOHmin
Speisestrom
ICCH
typ/max 1/2 mA
(je Gatter)
ICCL
typ/max 3/5,5 mA 0,6/1,1 mA
0,4/0,75 mA
Verzögerungszeit
tDLH
typ/max 11/22 ns
9/15 ns
4/ ns
tDHL
typ/max 7/15 ns
10/15 ns
5/ ns
tLH
typ
10 ns
9,5 ns
5 ns
(am Ausgang, 10 ... 90 %) tHL
typ
5 ns
6 ns
5 ns
Impulsflanke
2,0/ ns
(meist bei CL = 15 pF)
Speisespannung
Umgebungstemperatur
UCC
(4,75 ... 5,25) V
(4,5 ... 5,5) V
(0 ... 70) °C
* bei Gattern mit Schmitt-Trigger-Eingängen liegen die typischen Werte von US bei:
bei Monoflop-IS gilt:
für LH-Flanke
HL-Flanke
1,7 V
0,9 V
1,6 V
0,8 V
für LH-Flanke
HL-Flanke
1,4 V
1,4 V
1,55 V
1,35 V
Tafel 4.2.2: Statische und dynamische Kennwerte von TTL-Baureihen (NAND-Gatter)
12
4. Digitale Schaltkreisfamilien
'\QDPLVFKH.HQQZHUWH
Das dynamische Verhalten digitaler Schaltkreise wird im wesentlichen durchVerzögerungszeiten
und Flankenzeiten beschrieben. Tafel 4.2.2 zeigt die Werte für TTL-Schaltungen.
^ Zu den dynamischen Eigenschaften sind aber auch die dynamische Leistungsaufnahme bzw.
der frequenzabhängige Speisestrom und die zulässige Lastkapazität zu rechnen.
'\QDPLVFKHU6SHLVHVWURP6WURPVSLW]HQ
Auf den Zuleitungen zur Betriebsspannung digitaler Schaltstufen sind typisch Speisestromspitzen
zu messen. Sie sind insbesondere bei Schaltungen mit niedrigen Ausgangswiderständen, wie sie
TTL-Schaltkreise aufweisen, stark ausgeprägt. Ursachen sind:
^ dynamische Ausgleichsvorgänge infolge kapazitiver Belastung,
^ unterschiedlicher Speisestrom bei L- und H-Pegel am Ausgang,
^ Schaltverhalten der Ausgangsstufe.
'\QDPLVFKHV9HUKDOWHQGHU77/$XVJDQJVVWXIH
Bei L-Pegel am Ausgang befindet sich der untere Transistor T4 der TTL-Gegentaktstufe weit in
Sättigung. Er sperrt erst, wenn die in seiner Basis gespeicherte Ladung (CQ = 10 pF für 7400) über
den Widerstand R4 abgeflossen ist (Bild 4.2.1). Im Gegensatz dazu ist der obere Transistor T3 bei
Ausgangs-H-Pegel nur schwach gesättigt. Beim Umschalten kommt es zu einer Sperrverzögerung,
für eine kurze Zeit (ca. 5 ns bei 7400) sind beide Transistoren T3 , T4 der Ausgangsstufe leitend. Es
fließt ein "Kurzschlußstrom", der nur durch den Widerstand R3 begrenzt wird. Die entsprechende
Stromspitze kann meßtechnisch nachgewiesen werden.
Diese Impulsströme erhöhen zusätzlich die dynamische Verlustleistung PVdyn , der Beitrag ist bei
Frequenzen f > 2 MHz zu beachten (vgl. auch Abschnitt 3.3.3). Außerdem verursachen diese
Stromspitzen Störspannungen in der Stromversorgung, die zu Fehlschaltungen im Schaltsystem
führen können (Flipflops, Speicher). Dieser Effekt kann u. a. mit Hilfe von 6WW]NRQGHQVDWRUHQ
unterdrückt werden (vgl. auch Abschnitt 11).
Bei Schaltkreisen mit Schottky-Transistoren verläuft der Umschaltvorgang z. T. schneller bzw. die
Stromspitzen sind kleiner (Tafel 4.2.3).
^ Stromspitzen verursachen auch über die Induktivitäten der Zuleitungen Störspannungen, die
zu fehlerhaften Schaltzuständen führen können (vgl. Abschnitt 11).
Speisestromspitze ÎCC (bei L/H-Flanke von U0 )
TTL-Reihe
74
74 LS
74 ALS
Spitzenwert
ÎCC
(5 ...10) mA
(3 ... 6) mA
(6 ... 10) mA
Zeitdauer
tK
5 ns
8 ns
2 ns
Tafel 4.2.3: Stromspitzen bei TTL-Schaltkreisen infolge des dynamischen Schaltverhaltens der
Gegentaktausgangsstufe
4. Digitale Schaltkreisfamilien
13
(&/6FKDOWNUHLVH
$OOJHPHLQHV
Charakteristisch für die Schaltungen in ECL-Logik (emitter coupled logic) ist die Anwendung der
6WURPVFKDOWWHFKQLN (echte ungesättigte Logik). Die Transistoren werden dabei zwischen aktivem
Bereich und Sperrbereich umgeschaltet, eine Speicherzeit tritt nicht auf.
^ Da der Spannungshub U o = U oH − U oL sehr klein ist (ca. 0,9 V), erreicht die ECL-Reihe mit
tP = (0,1 ... 2) ns die kürzesten Verzögerungszeiten aller bekannten Schaltkreisfamilien.
^ Der große Leistungsverbrauch (bis 50 mW/Gatter), deshalb geringer Integrationsgrad, relativ
hohe Herstellungskosten, kleiner Signalhub und damit kleiner statischer Störabstand sind
weitere wesentliche Eigenschaften von ECL-Schaltungen.
^ Die typischen .RPSOHPHQWlUDXVJlQJH von ECL-Gattern unterstützen aber eine störsichere
symmetrische Übertragung über verdrillte Zweidrahtleitungen (vgl. Abschnitt 11.3).
*UXQGVFKDOWXQJLQ(&/
Das wesentliche Schaltungselement aller ECL-Schaltungen ist eine 'LIIHUHQ]YHUVWlUNHUVWXIH mit
konstantem Emitterstrom IE, die als Stromschalter betrieben wird (Bild 4.3.1).
Für Ue1 = Ue2 = 0 sind beide Transistoren leitend, der Strom IE teilt sich zu gleichen Teilen in die
beiden Kollektorströme auf. Das Emitterpotential liegt auf etwa UE = - 0.6 V.
Wird nun Ue1 > 0 (bei Ue2 = 0) gesteuert, so folgt das Emitterpotential UE dieser Änderung.
Transistor T2 wird zunehmend gesperrt, während Transistor T1 weiter aufsteuert und praktisch den
gesamten Emitterstrom IC1 ≈ IE aufbringt (Ue1 = 0,6 V, UE = 0).
Ab UCE1 = UCEX folgt das Potential am Kollektor von T1 dann der Eingangsspannung Ue1 direkt,
d.h. die Phasendrehung zwischen Ein- und Ausgangssignal verschwindet (Bild 4.3.1)!
Für Ue1 < 0 kehren sich die Verhältnisse um und Transistor T1 wird gesperrt.
UC1
UCC
R C1
UC1
Ue1
UCC
RC2
T1
T2
lineare
Aussteuerung
UC2
Ue2
IE
RE
- U EE
- 0,6
0,6
Ue1
Bild 4.3.1: Differenzverstärkerstufe mit Übertragungskennlinie
^ Somit wird im Schalterbetrieb der Emitterstrom zwischen beiden Transistoren umgeschaltet
(Stromschalttechnik, current mode). Die Stromaufnahme der Schaltstufe bleibt fast konstant.
Damit bleibt auch die Verseuchung der Versorgungsleitungen mit Störspitzen relativ gering.
14
4. Digitale Schaltkreisfamilien
/RJLVFKH9HUNQSIXQJLQ(&/
Werden dem Transistor T1 in Bild 4.3.1 weitere Transistoren parallel geschaltet, so erhält man eine
typische ECL-Verknüpfungsschaltung (Bild 4.3.2). Am gemeinsamen Kollektor entsteht jetzt die
ZLUHG$1'-Verknüpfung der den einzelnen Kollektorpotentialen zugeordneten Logiksignale. Die
Transistoren T1 , ..., T5 bilden den Stromschalter; durch den gemeinsamen Emitterwiderstand wird
ein Konstantstrom I0 erzeugt. An der Basis von T4 liegt ein fast konstantes Potential UR = - 0,7 V.
Damit gilt für das Emitterpotential UE = UR - 2UBE .
Sind die Eingangstransistoren T1, T2, T3 gesperrt (tiefes Potential an A, B, C), so ist T5 leitend und
bringt den Emitterstrom IE5 = I0 allein auf. Am gemeinsamen Emitteranschluß E liegt dabei eine
Spannung von UE = - 1,9 V, das Kollektorpotential von T5 ist um mindestens UCEsat = 0,6 V
positiver. Am Ausgang Y2 des Emitterfolgers mit T6 liegt damit L-Potential UL = -1,9 V. Dieser
L-Pegel reicht aus, um nachfolgende Eingangstransistoren sicher zu sperren.
Wird mindestens einer der Eingangstransistoren T1 , T2 , T3 durch H-Pegel UIH > -1,3 V an seinem
Eingang durchgesteuert, so steigt das Emitterpotential auf UE = - 1,6 V (bei UIH = - 1,0 V) und die
Transistoren T4 und T5 werden gesperrt. Am Ausgang Y1 entsteht L-Pegel von UOL = - 1,6 V, am
Ausgang Y2 dagegen H-Pegel von UOH < - 0,6 V (Spannungsabfall -UBE6 - IB R300 ).
^ Die im Vergleich zu anderen Schaltkreisen ungewohnte Zuordnung der Betriebsspannung zu
den Schaltpegeln erlaubt einerseits den niederohmigen Anschluß der Emitterfolger (T6, T7)
und bewirkt andererseits, daß die Betriebsspannung UEE bei ECL QLFKW in die Werte der
Spannungspegel eingeht.
Für das ECL-NOR-OR-Gatter MC 10102 werden folgende Kennwerte angegeben:
Low-Pegel:
High-Pegel:
Laufzeit:
Verlustleistung/Gatter:
Verlustleistung/ Rext :
UIL = -1,5 V,
UIH = (-1,1 ... -0,8) V,
tPd = 2 ns,
PVG = 25 mW,
PVR = 30 mW.
UOL =
UOH =
-1,65 V,
-1,0 V,
^ Die Widerstände an den Emitterfolgerausgängen sind bei Bedarf extern anzuschließen. Die
dabei zulässige Verlustleistung wird mit PVR angegeben.
0V
300
290
300
T6
Y2 = A+B+C
Y1 = A+B+C
T7
A
B
UR
C
E
T1
T2
T
3
I0
T5
T
4
1,18k
Stromschalter
Bild 4.3.2: ECL-Gatter, Prinzipschaltung
1,5k
1,5k
2,3k
A
B
C
≥1
Logiksymbol
UEE = - 5,2 V
Ausgangstreiber
Y2
Y1
4. Digitale Schaltkreisfamilien
15
,QWHJULHUWH,QMHNWLRQV/RJLN,/
*UXQGVFKDOWXQJGHU,//RJLN
Die integrierte Injektionslogik wurde unabhängig voneinander von den Firmen 3KLOLSV und ,%0
entwickelt und zählt zu den bipolaren Schaltkreisfamilien.
Wesentliches Kennzeichen dieser Logikschaltungen ist der extrem einfache Aufbau eines Gatters,
es werden keine ohmschen Widerstände verwendet (Bild 4.4.1). Das führt zu einem geringen
1
Flächenbedarf (ca. 10
bezogen auf TTL) und zu verringerter Verlustleistung.
i
T
I
I0
C1
C
2
e
2
C1
0
C2
e
T
1
T1
i
C1
p3
n1
e
C2
n2
p1 = p2
n3 = n4
Bild 4.4.1: I2 L - Inverter, Grundschaltung und technologischer Aufbau
Für eine Schaltstufe (Inverter, Negator) werden nur zwei Transistoren benötigt: der eigentliche
Schalttransistor T1 in Multikollektor-Ausführung und der pnp-Lateral-Transistor T2. Transistor T2
wirkt als Stromquelle und liefert den sogenannten ,QMHNWLRQVVWURP I0 .
^ Fließt der Injektionsstrom I0 in die Basis des Transistors T1 (e = H), so wird dieser leitend und
alle Kollektoren von T1 werden niederohmig (können Strom aufnehmen, L-Pegel).
^ Wird der Injektionsstrom I0 durch eine Steuerschaltung abgezogen (Ue < UBE1x), so ist T1
gesperrt und alle Kollektoren sind hochohmig (H-Pegel).
/RJLVFKH9HUNQSIXQJEHL,/6FKDOWXQJHQ
Die logische Verknüpfung erfolgt durch Zusammenschaltung der Kollektoren verschiedener Schalttransistoren und führt auf die wired-AND-Verknüpfung der Ausgangssignale (Bild 4.4.2).
I0
I
0
e1+ e2
U EE > 1V
R0
e1
I0
I0
e2
CL
a) logische Verknüpfung
e1+ e2
T2
n I0
b) Erzeugung gleicher Injektionsströme
Bild 4.4.2: Logische Verknüpfung und Erzeugung des Injektionsstromes bei I2 L-Technik
16
4. Digitale Schaltkreisfamilien
Zur Erzeugung definierter Injektorströme wird HLQ pnp-Transistor T2 mit Multikollektor über einen
externen Widerstand R0 an die Versorgungsspannung UEE ≤ 1 V gelegt (Bild 4.4.2 b). Es gilt:
R0 =
U EE − U BE
.
n I0
^ Im Interesse einer geringen Verlustleistung wird eine kleine Versorgungsspannung U EE P 1V
gewählt.
9HU]|JHUXQJV]HLWEHL,/
Die Durchlaufverzögerungszeit tP erhält man näherungsweise aus der Konstantstromladung einer
Lastkapazität CL und dem Pegelhub (Bild 4.4.2):
U = U IH − U IL
t p = C L U
I0
^
= U BEX1 − U CEX ,
= CL
U BEX − U CEX
.
I0
Die Verzögerungszeit tP ist umgekehrt proportional zum Injektorstrom I0. Damit bleibt das
/HLVWXQJV9HU]|JHUXQJV3URGXNW PV • t P nahezu konstant
P V . t P = C L (U) 2 .
Mit der Einstellung des Injektionsstromes I0 (1 nA ... 1 mA) lassen sich auch im laufenden Betrieb
die Schaltzeit und die Leistungsaufnahme über ca. 6 Dekaden steuern:
t P O 10 ns ... 100 s;
P V O 1 nW/Gatter ... 100 mW/Gatter .
^ I2L-Schaltungen werden bevorzugt in Verbindung mit analogen Schaltungen eingesetzt
(Zeitgeber, Ablenkschaltung in TV's, Latches in DA-Umsetzern, ...).
^ Die gute Beherrschung der CMOS-Technologien verhindert offensichtlich gegenwärtig einen
breiteren Einsatz der I2 L-Technik in logischen Schaltungen.
4. Digitale Schaltkreisfamilien
17
Q0266FKDOWNUHLVH
Schaltkreise mit FET von nur einem Kanaltyp ((LQNDQDOWHFKQLN) gibt es grundsätzlich mit p-Kanaloder n-Kanal-Transistoren. Aus technologischen Gründen werden n-Kanal-Schaltungen bevorzugt,
da nur positive Betriebsspannungen benötigt werden (TTL-Anpassung). Außerdem werden höhere
Schaltgeschwindigkeiten und gleichzeitig ein höherer Integrationsgrad erreicht.
MOS-Schaltkreise werden fast ausschließlich aus VHOEVWVSHUUHQGHQMOS-FETaufgebaut, da sie zu
einfacheren Schaltungsstrukturen führen und Betriebsspannung(en) nur einer Polarität benötigen.
^ Kennzeichnend für alle MOS-Schaltkreise ist, daß anstelle eines ohmschen Widerstandes RD
der Kanalwiderstand eines leitenden FET als Drainwiderstand RD verwendet wird.
Die Ausgänge von MOS-Schaltungen können zusammengeschaltet werden (wired AND). Damit
ergeben sich einfache Schaltungsstrukturen. Insbesondere komplexe logische Schaltungen wie
Kodewandler, Addierstufen, Zähler, Speicher, ... lassen sich wirtschaftlich realisieren. Einfache
logische Gatter werden kaum angeboten.
*UXQGVFKDOWXQJHQGHUQ.DQDO0266FKDOWNUHLVH
Als Schaltungsstrukturen für n-Kanal-MOS-Schaltkreise kommen sowohl die Paralleltechnik als
auch die Reihen- bzw. Serientechnik zur Anwendung (Bild 4.5.1).
U DD
UDD
R
R
D
a
T
1
e1
0V
NAND
D
T3
a
a
e2
T
2
e2
U DD1
UDD2
(12 V)
(5 V)
U DD
T
1
T
2
e2
e1
e1
T
2
T
2
T1
0V
0V
NOR
NAND mit SL-Typ
T
3
a
T1
T
4
e
0V
Gegentaktinverter
Bild 4.5.1: N-MOS-Verknüpfungsschaltungen in Reihen- und Paralleltechnik
Bei der 5HLKHQVFKDOWXQJ mehrerer Transistoren (NAND) erhöht sich der Widerstand RON zwischen
Ausgang a und Masse. Mit steigender AnzahlSDUDOOHOHU Transistoren (NOR) wächst die parasitäre
Lastkapazität CL und damit die Schaltzeit. Beides wirkt begrenzend auf die Anzahl von Eingängen.
Der *HJHQWDNWLQYHUWHU verbessert das dynamische Verhalten; er benötigt aber zur Realisierung eines
praktikablen Ausgangs-H-Pegels UaH O UDD2 - 2 UTh eine zweite Betriebsspannung UDD2 > UDD1.
Dynamisch ähnlich gutes Verhalten zeigt eine Schaltstufe mit VHOEVWOHLWHQGHPFETals RD :
^ Bei einer geringen Schwellspannung UTh O 1 V der Schalttransistoren kann dabei auf die
zweite Betriebsspannung verzichtet und die Schaltung mit UDD = 5 V betrieben werden.
^ Ist mindestens einer der Schalttransistoren T1 , T2 gesperrt, so leitet T3 und es gilt Ua O UDD .
Für 2,5 V < Ua < 5 V arbeitet T3 im ohmschen Bereich und wird für Ua < 2,5 V in den
Sättigungsbereich gesteuert. Er wirkt jetzt als Stromquelle und liefert den Drainstrom IDSS .
18
4. Digitale Schaltkreisfamilien
&0266FKDOWNUHLVH
CMOS-Schaltkreise sind mit NRPSOHPHQWlUHQ MOS-FET (p- und n-Kanal) aufgebaut und erfordern
eine aufwendigere Technologie als die MOS-Schaltkreise (6 - 7 Maskierungsschritte). Wesentliche
Eigenschaften von CMOS-Schaltkreisen sind
^ die sehr kleine statische Verlustleistung (nW/Gatter),
^ die hohe statische Störsicherheit (typisch 0,4 . UDD ),
^ ein großer Speisespannungsbereich (3 ... 15) V,
^ TTL-Kompatibilität bei UDD = 5 V (bzgl. Spannungspegel).
&026*UXQGVFKDOWXQJHQ
Als logischer Grundbaustein für alle CMOS-Schaltkreise kann der Inverter (Negator) angesehen
werden (Bild 4.6.1). Jeder der beiden Transistoren ist im Prinzip ein spannungsgesteuerter Schalter
mit statisch hochohmigem Eingang bezüglich des Steuersignals an Eingang e.
U DD
T2 (p)
T2’
T2
e1
a
T2
e2
e
U DD
U DD
T2’
a
a
T1
T1 (n)
e1
T1
e2
T1’
T1’
0V
0V
Inverter
NOR
0V
NAND
Bild 4.6.1: CMOS-Grundschaltungen
,QYHUWHU
Bei binärer Ansteuerung übernehmen die Transistoren abwechselnd die Rolle des aktiven Schalters
und des passiven Schaltelementes (RD). Da statisch immer einer der beiden Transistoren gesperrt
ist, fließt nur ein sehr kleiner Reststrom im nA - Bereich über die Schaltstrecke Source-Drain.
^ Bei diesen extrem kleinen Strömen hat die Drain-Source-Strecke des leitenden Transistors
eine Sättigungsspannung im mV-Bereich. Der Ausgangspegel Ua liegt damit praktisch auf
dem Niveau der Speisespannung UDD (H) oder auf Massepotential (L).
Der CMOS-Inverter arbeitet nach dem gleichen *HJHQWDNWSULQ]LS wie TTL-Ausgangsstufen. Beim
Umschalten tritt also auch hier ein Querstrom auf, der die dynamische Verlustleistung erhöht und
Störspitzen auf der Speisespannungsleitung bewirkt.
^ Die symmetrische Struktur der Schaltung hat auch weitgehend symmetrische Kennwerte zur
Folge; so liegt die Umschaltspannung typisch bei U IK = U S O 1 U DD .
2
4. Digitale Schaltkreisfamilien
19
9HUNQSIXQJVVFKDOWXQJHQ
Als Verknüpfungsprinzipien kommen auch bei CMOS-Schaltungen die Paralleltechnik und die
Reihentechnik zur Anwendung (Bild 4.6.1).
Bei 3DUDOOHOWHFKQLN bildet die Parallellschaltung der n-Kanal-Transistoren die aktive Schaltstrecke
und die Reihenschaltung von p-Kanal-Transistoren das passive Element (Drainwiderstand RD) der
Schaltstufe. Die Gateanschlüsse sind jeweils paarweise zusammengefaßt. Am Ausgang entsteht die
NOR-Funktion bezogen auf die Eingangssignale e1 , e2 .
Bei5HLKHQWHFKQLN bildet die Reihenschaltung der n-Kanal-Transistoren die aktive Schaltstrecke und
die Parallelschaltung von p-Kanal-Transistoren das passive Element, es entsteht ein NAND-Gatter.
^ Es arbeiten immer ein n-Kanal- und ein p-Kanal-Transistor paarweise im Gegentaktbetrieb
zusammen. Am Ausgang a ergibt sich der maximal mögliche Signalhub von fast Betriebsspannungspegel. Die statische Verlustleistung eines Gatters bleibt dabei sehr klein (nW), da
statisch fast kein Querstrom durch die Gegentaktstufe fließt.
7UDQVPLVVLRQVJDWWHU$QDORJVFKDOWHU
Eine CMOS-Schaltung besonderer Art und Bedeutung ist das Transmissionsglied ($QDORJVFKDOWHU);
ein entsprechendes Äquivalent in Bipolartechnik ist nicht bekannt. Da FET den Strom in beiden
Richtungen übertragen können (Drain und Source tauschen dabei ihre Funktion), lassen sich durch
Parallelschaltung eines n-Kanal- und eines p-Kanal-Transistors Torschaltungen zurELGLUHNWLRQDOHQ
Signalübertragungaufbauen (Bild 4.6.2). Eine weitere Besonderheit dieser Transmissionsgatter ist,
daß NHLQH6LJQDOUHJHQHULHUXQJ erfolgt (im Gegensatz zu anderen Digitalschaltkreisen).
Inverter
U DD
T2
E
A
Z
T1
E
X1
A
1
Schaltsymbol
a)
USS
U DD
T2
p
E
A
Z
p
T3
T1
1
n
b)
USS
Bild 4.6.2: CMOS-Transmissionsgatter, Analogschalter (CD 4016)
Z
20
4. Digitale Schaltkreisfamilien
Die Schaltung besteht aus dem eigentlichen Analogschalter T1 , T2 und einem CMOS-Inverter, der
die Gate-Anschlüsse des Transmissionsgliedes stets negiert zueinander ansteuert.
^ High-Pegel am Eingang E öffnet direkt den n-Kanal-Transistor T1 und über den Inverter auch
den p-Kanal-Transistor T2. Zwischen den Anschlüssen A und Z entsteht eine niederohmige
Verbindung, über die sowohl analoge als auch digitale Signale ELGLUHNWLRQDO übertragen
werden können. Bei Low-Pegel am Steuereingang E sperren beide Transistoren T1 und T2
und die Strecke A - Z wird hochohmig (rOFF > 109 Ω).
^ Bei leitendem Zustand der FET T1 und T2 dagegen ist der Widerstand rON der Strecke A - Z
stark von der Versorgungsspannung UDD , der Signalpannung | UA - UZ | und der Ausgangslast
abhängig [rON = (0,03 ... 1,5) kΩ]. Durch Steuerung der Substratspannung (Bulk-Anschluß)
der Transistoren T1 , T2 über einen zusätzlichen Transistor T3 in Bild 4.6.2 b) kann diese
Abhängigkeit verringert werden (z.B. Analogschalter CD 4016).
Die wichtigsten Anwendungsfälle für Transmissionsgatter sind:
^ $QDORJVFKDOWHU$QDORJ0XOWLSOH[HU und 7ULVWDWH6WHXHUXQJ von CMOS-Ausgangsstufen.
7ULVWDWH6FKDOWXQJHQLQ&0267HFKQLN
Auch bei CMOS-Schaltungen dürfen Gatterausgänge nicht ohne Einschränkung parallel geschaltet
werden (unzulässiger Querstrom). Eintaktausgangsstufen wie bei TTL-Schaltkreisen werden bei
CMOS-Schaltkreisen nicht realisiert. Zur Erzeugung des 7ULVWDWH9HUKDOWHQV werden verschiedene
Schaltungen verwendet. Bild 4.6.3 zeigt eine Möglichkeit. Der logischen Schaltung wird ein
Analogschalter nachgeschaltet. Ist dieser gesperrt, dann ist der Schaltungsausgang hochohmig.
^ Für OE = H ist der Analogschalter (T6 , T7 ) leitend und verbindet die Gateanschlüsse der
Ausgangstransistoren T9 , T10 niederohmig. Damit ist je nach Ansteuerung über X einer der
beiden Transistoren leitend und der andere gesperrt.
^ Für OE = L wird das Transmissionsgatter gesperrt (T1 , T5 , T8 sind leitend). Damit wird das
Gate von T9 auf H und das Gate von T10 auf L gezogen. Beide Ausgangstransistoren sind
gesperrt und der Ausgang Y ist hochohmig gegen Masse und Betriebsspannung.
U DD
T1
T8
T3
T9
OE
X
Y
T7
T6
T
2
T4
T5
T10
Analogschalter
GND
Bild 4.6.3: Tristate-Ausgang der LOCMOS-Reihe HEF 4000 B
4. Digitale Schaltkreisfamilien
21
Der Reststrom gesperrter Tristate-Ausgänge ist sehr klein (bei HEF-Reihe max. 1,6 µA bei 25 °C).
Die zulässige Anzahl parallel geschalteter Ausgänge ist aber trotzdem beschränkt, weil sich mit
wachsender Lastkapazität CL die Verzögerungszeit erhöht.
Ein sogenanntesGLJLWDOHV7UDQVPLVVLRQVJOLHG mit Tristate-Verhalten zeigt Bild 4.6.4.
^ Für OE = L folgt der Ausgang dem Eingang e (a = e, a 1 = a 2 = e ). Die Ausgangsstufe schaltet
den Betriebsspannungspegel oder Massepotential auf den Ausgang a. Für OE = H werden
beide Ausgangstransistoren gesperrt, der Ausgang a ist hochohmig.
UCC
e
a
&
1
OE e
1
L
L
H
H
a
≥1
a2
OE
L
H
L
H
a1 a2
a
H
L
H
H
e
e
Z
Z
H
L
L
L
GND
Bild 4.6.4: Digitales Transmissionsglied in CMOS-Technik
Eine weitere Möglichkeit zur Tristate-Steuerung von CMOS-Ausgängen zeigt Bild 4.6.5. Mit Hilfe
der zusätzlichen Serien-Transistoren T3, T4 in den Versorgungsleitungen wird bei OE = L die
eigentliche Logikschaltung niederohmig mit Betriebsspannung UDD und Masse verbunden oder bei
OE = H hochohmig abgetrennt.
^ Dieses Schaltungsprinzip wird z. T. auch bei hochintegrierten Schaltkreisen verwendet (z.B.
zur Schlafsteuerung bei Einchipprozessoren, EPROM, ...).
UDD
T
4
OE
T
6
T
2
e
Inverter
a
T
1
T
5
T
3
GND
Bild 4.6.5: Tristate-Steuerung mit Serientransistoren in den Versorgungsleitungen
22
4. Digitale Schaltkreisfamilien
.HQQZHUWHYRQ&0266FKDOWNUHLVHQ
(LQJDQJVNHQQZHUWH
(LQJDQJVVWURP(LQJDQJVZLGHUVWDQG
CMOS-Eingänge sind statisch sehr hochohmig (Gleichstromwiderstand 1012 Ω ... 1015 Ω) und
belasten einen treibenden Ausgang gleichstrommäßig praktisch nicht. Die Eingangsströme liegen
typisch im pA-Bereich und sind stark temperaturabhängig.
(LQJDQJVVFKXW]VFKDOWXQJHQ
Infolge des sehr hohen Gleichstromwiderstandes kann sich die kleine Eingangskapazität Ce O 5 pF
statisch auf große Spannungswerte aufladen ( > 50 V ... 100 V). Die entsprechend hohe Feldstärke
kann zum Gate-Substrat-Durchbruch und in der Folge zur Zerstörung des Schaltkreises führen.
^ CMOS-Eingänge werden grundsätzlich mit internen Schutzschaltungen ausgestattet.
Für die integrierten Schutzdioden wird typisch ein zulässiger Strom I F > 10 mA angegeben. Reicht
der interne Scutzwiderstand R = (0,2 ... 1) kΩ nicht aus, so muß zusätzlich ein externer SchutzWiderstand RV = (10 ... 100) kΩ in Reihe zum Eingang geschaltet werden (Bild 4.6.6).
^ Die Schutzschaltungen verringern den Gleichstromeingangswiderstand (Faktor 10 ... 100).
^ Bei Spannungen UE < 0 und UE > UDD werden CMOS-Eingänge niederohmig !
UDD
Rv
e
E
UDD
Rv
400
e
HEF 4000 B
E
R = ( 0,2 ... 1) k Ω
Rv = (10 ...100) k Ω
R
CD 4000 B
Bild 4.6.6: Integrierte Schutzschaltungen gegen statische Aufladung und Störspitzen
0D[LPDOZHUWHIU(LQJDQJVVSDQQXQJXQG(LQJDQJVVWURP
Für alle CMOS-Eingänge werden für die zulässigen Werte von Eingangsspannung und -strom
einheitliche Grenzwerte angegeben
− 0, 5 V > U I > U DD + 0, 5 V und I I > 10 mA (20 mA) .
Wird an einem Eingang eines Schaltkreises der LOCMOS-Reihe 4000 dieser Grenzwert für die
Spannung XQGRGHU den Strom überschritten, so besteht die Gefahr der Schaltkreiszerstörung durch
den sogenannten /DWFKXS(IIHNW (Durchbruch zweiter Art).
^ Bei neueren CMOS-Reihen wird dieser Effekt durch technologische (Isolation, Schutzringe)
und schaltungstechnische Maßnahmen stark reduziert, aber nicht aufgehoben.
4. Digitale Schaltkreisfamilien
23
=XP/DWFKXS(IIHNW
Der Latch-up-Effekt wird durch parasitäre bipolare npn- und pnp-Sperrschichten hervorgerufen, die
technologiebedingt bei den CMOS-Schaltungen auftreten und eine 7K\ULVWRUVWUXNWXU zwischen den
Versorgungsanschlüssen UDD und GND (0 V) bilden. Das wird durch die integrierten Schutzdioden
noch verstärkt. Bild 4.6.7 zeigt diese Thyristorstruktur als Transistor-Ersatzschaltung.
^ Das mögliche =QGHQdieses Thyristors führt zum /DWFKXS(IIHNW (Durchbruch zweiter Art).
Es entsteht ein hoher Querstrom, der den Schaltkreis thermisch überlastet und zerstört.
Werden die beiden Bipolartransistoren in Bild 4.6.7 einmal leitend, so halten sie sich gegenseitig in
diesem Zustand fest, solange der Querstrom über R1 und/oder R2 die Schleusenspannung der
Basis-Emitter-Diode des entsprechenden Transistors erzeugen kann (Haltestrom). Voraussetzung
zum =QGHQ des Thyristors ist, daß der Querstrom größer wird als dieser Haltestrom und/oder die
Spannung größer ist als die Zündspannung des Thyristors (Durchbruch).
^ Nach Herstellerangaben wird der Latch-up-Effekt bei CMOS-Schaltkreisen sicher vermieden,
wenn die Ströme an DOOHQ Schaltkreisanschlüssen auf Werte unter 10 mA begrenzt sind und
die maximale Spannung am Schaltkreis kleiner bleibt als der angegebene Grenzwert.
U in
USS
UDD
G
D
S
T2
e
p+ n+
T1
U in
0V
n+
R2
a
UDD
Uout
G
D
S
p+
p+ n+
SiO2
p-Wanne
T1
T2
Uout
n - Substrat
R1
Bild 4.6.7: CMOS-Inverter, technologischer Aufbau und parasitärer Thyristor
8QEHQXW]WH(LQJlQJH
Die zur Realisierung der logischen Funktion unbenutzten Eingänge von CMOS-Schaltungen dürfen
niemals offen bleiben, sondern müssen immer beschaltet werden (UDD, Masse, andere Eingänge).
Nicht beschaltete CMOS-Eingänge bewirken eine erhöhte Leistungsaufnahme und führen leicht zu
Fehlschaltungen. Die Gefahr offener CMOS-Eingänge besteht auch im Busbetrieb bei Ansteuerung
durch Tristate-Ausgänge bzw. bei Ansteuerung durch Treiberstufen, die sich auf einer anderen
Baugruppe befinden (Leitungen über Steckverbinder).
^ An offenen CMOS-Eingängen wird infolge des hohen Eingangswiderstandes die parasitäre
Eingangskapazität leicht auf die Schwellspannung US aufgeladen. Damit werden die beiden
Ausgangstransistoren der Inverterstufe gleichzeitig leitend und es fließt ein hoher Querstrom.
In der Folge steigen Leistungsaufnahme und Betriebstemperatur stark an, der Störabstand
verringert sich.
^ Offene Eingänge werden vermieden, indem man alle Eingänge (am Schaltkreis bzw. auf der
eigenen Baugruppe) über einen Widerstand R = (0,1 ....1) MΩ an UDD bzw. GND schaltet.
Allerdings verringert sich dabei der wirksame Eingangswiderstand (vgl. Schutzschaltungen).
24
4. Digitale Schaltkreisfamilien
$XVJDQJVVWXIHQXQGNHQQZHUWH
Die o.g. CMOS-Grundstrukturen reichen zur Realisierung der logischen Funktionen aus. Von
großer praktischer Bedeutung ist die Festlegung im sogenannten JEDEC-Standard (1976), daß jeder
CMOS-Ausgangsstufe eine Pufferstufe nachgeschaltet ist (Bild 4.6.8). Damit werden einerseits
einheitliche Rahmenbedingungen für Datenblätter und CMOS-Kennwerte festgelegt, andererseits
werden gleichzeitig wesentliche Kennwerte der CMOS-Schaltkreise verbessert:
^
^
^
^
vollständige Entkopplung von Ein- und Ausgängen,
steilere und nahezu gleiche Impulsflanken (tLH = tHL ),
kürzere und für beide Flanken gleiche Verzögerungszeiten (tDLH = tDHL ),
erhöhter Störabstand (steilere Übertragungskennlinie).
Der zusätzliche Ausgangspuffer vergrößert zunächst die Verzögerungszeit der seriellen Anordnung.
Die innere Logikstufe kann jetzt aber mit wesentlich kleineren Transistoren realisiert werden, da
nur die Ausgangsstufe die Treiberströme aufbringen muß. Infolge geringerer Schaltungskapazitäten
haben kleinflächige Transistoren kürzere Schaltzeiten. Bei den CMOS-Gattern der LOCMOSReihe mit Pufferstufe sind Chipfläche und Schaltzeiten kleiner als bei ungepufferten Schaltungen.
^ Schaltkreise mit Pufferstufe werden hinter ihrer Typenbezeichnung durch den Buchstaben B
(buffered), Schaltkreise ohne Pufferstufe mit UB (unbuffered) gekennzeichnet.
UDD
e1
Ua
U DD = 15 V
15
-55°C
125°C
UDD = 10 V
e2
10
a
5
UDD = 5 V
0V
2-Eingangs-NOR
Ausgangspuffer
Ue
2
4
6
8
10
Bild 4.6.8: NOR-Gatter der LOCMOS-Reihe HEF 4000 B, Übertragungskennlinien bei
verschiedenen Speisespannungen
hEHUWUDJXQJVNHQQOLQLH
Die Übertragungskennlinie der CMOS-Gatter ist von der Speisespannung abhängig (Bild 4.6.8).
Der steilste Teil der Kennlinie liegt immer bei UI = 12 U DD 20% , für Gatter eines Schaltkreises
sind die Abweichungen > 3% . Der Ausgang schaltet um, wenn die Eingangsspannung den Wert
der Umschalt- oder Schwellspannung U e = U S = 12 U DD erreicht. Die Temperaturabhängigkeit der
Übertragungskennlinie ist relativ gering.
Zur Erhöhung des Ausgangsstromes (Verringerung des Ausgangswiderstandes) lassen sich CMOSSchaltkreiseein-XQGausgangsseitigzusammenschalten. Die Gefahr einer thermischen Überlastung
besteht nicht, weil bei FET der Drainstrom mit steigender Temperatur sinkt. Damit überwiegt der
Temperatureinfluß auf die Ladungsträgerbeweglichkeit, die mit steigender Temperatur abnimmt.
4. Digitale Schaltkreisfamilien
25
+LJKVSHHG&026%DXUHLKH+&+&7
Große Verbreitung seit ihrer Einführung 1981 haben die beiden CMOS-Baureihen 74 HC / 74 HCT
gefunden. Auf der Grundlage einer weiterentwickelten CMOS-Si-Gate-Technologie und durch
angepaßte Schaltungsstrukturen ist die HCT-Reihe pin- und funktionskompatibel zu den LS-TTLSchaltkreisen. Auch die dynamischen Kennwerte (Lauf- und Verzögerungszeiten) liegen in der
Größenordnung der LS-TTL-Reihe. Die typischen Elemente der Baureihe 74 HCT zeigt Bild 4.6.9.
T3
D3
R1
T4
R2
T1
e
T2
T5
logische Verknüpfung
UDD
T6
a
T7
GND
EingangsSchutzschaltung
Ausgangspuffer
mit Schutzschaltung
Eingangsstufe mit
Pegelanpassung
Bild 4.6.9: Typische Grundschaltung der CMOS-Baureihe 74 HCT
Die Transistoren T1, T2 und T4, T5 bilden die übliche CMOS-Eingangsstufe mit Puffer. Zusätzlich
erfolgt mit der Diode D3 und Transistor T3 eine Pegelumsetzung, welche die Umschaltschwelle der
HCT-Eingänge auf etwa 1,4 V festgelegt. Damit wird VSDQQXQJVPlLJ TTL-Kompatibilität ohne
externe Bauelemente erreicht (Bild 4.6.10).
^ Bei der Anschaltung an LS-TTL-Gatter ist eine erhöhte Stromaufnahme von HCT-Eingängen
zu beobachten. Bei niedrigen Eingangs-H-Pegeln (UOH, LSTTL ≥ 2,7 V) wird der p-KanalTransistor T1 der Eingangsstufe nicht völlig gesperrt und es fließt ein Querstrom zwischen
UDD und GND (evtl. zusätzlichen pull-up-Widerstand einfügen, vgl. auch Abschnitt 8).
5
U
V
4,9
UOHmin
4
3
2,4
SH
2,7
2,4
2,5
3,5
UIHmin
2
0
1,0
0,8
1
74
74LS
0,5
74ALS
SL
74AS
74F
74HCT
0,1
74HC
Bild 4.6.10: Logikpegel verschiedener Schaltkreisfamilien
UILmax
UOLmax
26
4. Digitale Schaltkreisfamilien
Kennwerte
CMOS
bei = 25° C
TTL
HEF 4000 B
74 HCT
5V
10 V
15 V
5V
74 LS
74 ALS
Eingangsspannung
(in V)
UIL
max
1,5
3
4
0,8
0,8
0,8
UIH
min
3,5
7
11
2
2
2
(in V)
UOL
max
0,05
0,05
0,05
0,1
0,5
0,5
bei IO < 1 µA
UOH
min
4,95
9,95
14,95
4,9
2,7
2,7
IOL
max
0,44
1,1
3
5
8
8
IOH
min
0,44
1,1
3
5
0,4
0,4
IDDL
typ
1
2
4
2
600
400
IDDH
typ
1
2
4
2
200
100
1 MHz
5 MHz
10 MHz
typ
0,7
3,5
7
1,8
9
18
3,7
18,5
37
1,3
7,5
15
2
3
4,5
1,25
2
3
je Gatter (in ns)
tPLH
typ
35
16
13
8
9
4
(bei CL = 15 pF)
tPHL
typ
16
13
11,5
8
10
5
(in ns)
tLH
typ
25
15
10,5
6
9,5
5
(bei CL = 15 pF)
tHL
typ
9
13
33
6
6
5
Speisespannung
UDD / UCC
Ausgangsspannung
Ausgangsstrom *
(in mA)
Speisestrom
je Gatter (in µA)
Leistungsaufnahme
je Gatter (in mW)
Verzögerungszeit
Impulsflanke
Temperaturbereich
5 ...15 V
- 40 ... + 85 °C
4,5 V
...
5,5 V
4,75 V
...
5,25 V
4,5 V
...
5,5 V
0 ... 70 °C
* Der Ausgangsstrom für CMOS-Gatter wird bei spezifischen Werten der Ausgangsspannung UOL bzw. UOH
angegeben.
Tafel 4.6: Kennwerte von CMOS-Schaltkreisen /3/
4. Digitale Schaltkreisfamilien
27
%,&0266FKDOWNUHLVUHLKH%&7
Bei Logikschaltungen der BICMOS-Technik werden die Eigenschaften von CMOS-Schaltungen
und Bipolarschaltungen vorteilhaft in HLQHU Schaltungsstruktur vereinigt (Bild 4.7):
^ die hochohmige Eingangsschaltung einschließlich logischer Verknüpfung und die sehr
geringe Stromaufnahme von CMOS mit
^ hoher Stromergiebigkeit (wichtig bei kapazitiver Belastung) bei vergleichsweise kleinen
geometrischen Strukturen der Ausgangstransistoren in Bipolartechnik.
M4
M6
UDD
R3
M2
R2
.
R1
X
T2
T3
Y
M1
T4
R4
OE
GND
M3
CMOS-Inverter
(M , M )
1 2
M5
Tristate-Steuerung
(M 3 ... M7 )
M7
Schottky-Treiber
(T2, T3 , T4 )
Bild 4.7: Grundschaltung eines BICMOS-Treibers mit Tristate-Ausgang
Der bekannte CMOS-Inverter (M1, M2) steuert die ebenfalls bekannte Gegentaktausgangsstufe mit
bipolaren Schottky-Transistoren.
^ Für OE = H werden die FET M4, M6 gesperrt und die FET M3, M5, M7 leitend und damit
alle Transistoren der bipolaren Treiberstufe gesperrt (Tristate-Zustand).
Zur Verbesserung des Schaltverhaltens bei gleichzeitig wesentlich geringeren Störimpulsen auf der
Versorgungsleitung (wenn mehrere Ausgänge eines Schaltkreises gleichzeitig umschalten) werden
die Schaltkreise der Reihe 74 BCT auch mit Mittenanschlüssen (center pinning) für die Masse und
die Versorgungsspannung angeboten.
BICMOS-Schaltungen kommen vorzugsweise bei Busschaltkreisen (Treiber) zur Anwendung:
^
^
^
^
Treiber für große kapazitive Lasten,
Takttreiber für hohe Anzahl von Flipflop-Takteingängen,
Ansteuerschaltkreise für Speicherblöcke (RAM),
Treiber für Leistungsstufen.
28
4. Digitale Schaltkreisfamilien
*DOOLXP$UVHQLG0(6)(76FKDOWNUHLVH
Für die weitere Steigerung der Verarbeitungsgeschwindigkeit logischer Schaltungen (Echtzeitdatenverarbeitung, Bild- und Sprachverarbeitung, ...) bieten sich Halbleiterverbindungen aus Elementen
der Gruppen III und V des Periodensystems an. Die praktisch größte Bedeutung haben z. Z.
Halbleiter auf der Basis von Gallium-Arsenid (GaAs). Der erste MESFET wurde bereits 1965 als
selbstleitender Typ hergestellt (D-MESFET, depletion mode).
^ Die wichtigste Eigenschaft von GaAs im Vergleich zu Silicium sind die größere Elektronenbeweglichkeit (ca. 6 x höher) und der hohe zulässige Temperaturbereich (über 200°C).
Seit etwa 1987 sind logische Schaltungen auf GaAs-Basis auf dem Markt. Die Prinzipschaltungen
in Bild 4.8 zeigen die strukturelle Analogie zu nMOS-Schaltungen (vgl. Abschnitt 4.5).
^ Der Einsatz selbstleitender MESFET-Typen (Bild 4.8 a) erfordert genau wie selbstleitende
MOS-FET zwei Versorgungsspannungen. Die Transistoren M4 und M5 sowie die SchottkyDioden D1 , D2 werden zur Pegelanpassung benötigt.
^ Die Verlustleistung dieser Schaltkreise beträgt etwa PV = (1 ... 10) mW / Gatter.
UDD
M3
M4
M3
D1
D2
X2
UDD
X2
Y
M5
X1
M1
a)
M2
Logikstufe
USS
GND
Pegelanpassung
Y
X1
M1
b)
M2
USS (0V)
Bild 4.8: Grundschaltungen von GaAs-MESFET-Schaltkreisen
Der gleichzeitige Einsatz selbstsperrender (E-MESFET, enhancement mode) und selbstleitender
MESFET bietet mehrere Vorteile (vgl. auch Abschnitt 4.5):
^ Die Schaltungsstruktur vereinfacht sich; es wird nur eine Versorgungsspannung UDD ≥ 2 V
benötigt und die Verlustleistung wird drastisch reduziert [PV = (0,1 ... 0,25) mW / Gatter].
Die selbstsperrenden Transistoren M1 , M2 (Bild 4.8 b) haben im leitenden Zustand eine kleine
Restspannung UDS ON ≤ 100 mV. Sind beide Transistoren gesperrt und fließt kein Strom über den
selbstleitenden Transistor M3 , so ist der Spannungsabfall an dessen DS-Strecke UDSS O 900 mV.
Am Ausgang Y liegt damit hohes Potential H.
^ Typische Pegel sind UH = 0,8 V, UL = 0,2 V bei UDD = 2 V.
^ Bei UDD = 0 V und USS = - 2 V wird ECL-Kompatibilität der Spannungspegel erreicht.
^ GaAS-MESFET-Schaltkreise erreichen z. Z. Schaltfrequenzen bis etwa 30 GHz (tD ≤ 70 ps).
5. Rückgekoppelte Kippschaltungen
1
5FNJHNRSSHOWH.LSSVFKDOWXQJHQ
Kippschaltungen sind meist stark rückgekoppelte Verstärkerschaltungen, lassen sich aber auch mit
logischen Gattern (NAND, NOR) realisieren. Die Gatter werden dabei als Verstärker betrieben (im
Umschaltbereich). Das Ausgangssignal ist von den Zuständen der Eingangssignale und infolge der
Rückkopplung auch von der Vorgeschichte abhängig. Die Übertragungsfunktion G läßt sich aus
dem gegebenen Signalflußbild ermitteln.
^ Mit wachsendem Rückkopplungsfaktor Ko steigt die innere Verstärkung |G| der Schaltung,
die Übertragungskennlinie wird steiler. Für |Ko V| = 1 zeigt sie beim Schwellwert Xe = XeS
einen sprungartigen Übergang zwischen den beiden Ausgangspegeln. Für |Ko V| >> 1 hat die
Übertragungskennlinie im Bereich XeL < Xe < XeH +\VWHUHVHYHUKDOWHQ.
Xg
Xe
+
Ke
Xd
Xa
+V
+
Xr
X a = V Xd
Xd = X e + K o X a
G =
Ko
|Ko V| < 1
KV
Xa
V
=
Xe 1 - K oV
|K oV| = 1
Xa
|KoV| > 1
Xa
X aH
Xa
V>0
XaL
Xe
Xe
XeL
XeH
Xe
XeS
Xa
XeL
Xa
XeH
Xa
XaH
V<0
XaL
Xe
X
eL
X
eH
Xe
XeS
Xe
X eL
XeH
Tafel 5.1: Übertragungskennlinien mitgekoppelter Verstärker /1/
Es werden drei Gruppen von Kippschaltungen unterschieden:
^ %LVWDELOHKippschaltungen mit zwei stabilen Zuständen (Flipflop, Schmitt-Trigger),
^ 0RQRVWDELOHKippschaltungen mit einem stabilen und einem metastabilen Zustand
(Univibrator bzw. Monoflop) und
^ $VWDELOHKippschaltungen mit zwei metastabilen Zuständen (Multivibrator, Taktgenerator).
Die wichtigste Kippschaltung ist sicher das Flipflop als grundlegendesVWDWLVFKHV6SHLFKHUHOHPHQW
(vgl. Abschnitt 9). Die anderen Kippschaltungen werden typisch zur Erzeugung und Regenerierung
von Impulsfolgen, zur Realisierung breiter Strom-/Spannungsimpulse und anderen Aufgaben der
Impulsverarbeitung angewendet.
2
5. Rückgekoppelte Kippschaltungen
)OLSIORS6FKDOWXQJHQ
Ein Flipflop ist eine binäre Schaltung mit zwei stabilen Zuständen. Durch eine geeignete)ROJHder
(LQJDQJVEHOHJXQJHQ kann der eine oder der andere Zustand erzeugtund/oderJHVSHLFKHUWwerden.
Flipflops sind neben den logischen Gattern (Verknüpfungsglieder) die wichtigsten Grundbausteine
digitaler Schaltungen und werden in vielfältiger Form eingesetzt. Unabhängig von spezifischen
anderen Modifikationen wird zwischen ungetakteten und taktgesteuerten Flipflops unterschieden.
%DVLV)OLSIORS
In der einfachsten Form läßt sich ein Flipflop aus zwei rückgekoppelten NAND- oder NOR-Gattern
als sogenanntes RS-Flipflop aufbauen (Bild 5.1.1).
R
>1
>1
verkürzte Form:
Q1
Q2
Rn+1 S n+1
n+1 n+1 n
n+1 n+1
R
S
Q1 Q1 Q2
S
R
&
&
Q1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
1
1
0
0
0
0
Q2
S
1
0
0
0
1
1
0
0
0
0
1
1
R
0
1
0
1
n+1
S
n+1
Q n+1 Q n+1
1
2
n
n
Q1
Q1
0
1
0
1
0
0
n+1
n+1
Q1
Q2
0
0
0
1
1
1
1
0
1
0
0
1
1
n
Q
1
n
Q1
1
Bild 5.1.1: Basis-Flipflops mit Analysetabelle
)OLSIORSDXV125*DWWHUQ
Wird der Setzeingang mit S = H und der Rüchsetzeingang mit R = L belegt, so schaltet das Flipflop
in eine stabile Lage (Q2 = L, Q1 = H). Verschwindet das Eingangssignal an S wieder (bei R = L), so
verbleibt die Schaltung in dieser Lage (Speichern). Mit R = H kann bei S = L das Flipflop
zurückgesetzt werden und es entsteht Q1 = L, Q2 = H (zweiter stabiler Zustand).
^ Die Schaltung ist in beiden Zuständen stabil, da jeweils der auf H-Pegel liegende Ausgang
über die Rückführung den anderen Ausgang auf L-Pegel schaltet.
^ Eine Sonderstellung nimmt die Belegung S = R = H ein. Beide Ausgänge schalten bei dieser
Belegung auf Q1 = Q2 = L. Bei einem nachfolgenden JOHLFK]HLWLJHQ Wechsel der beiden
Eingangsbelegungen auf L entsteht eine Unsicherheit, welcher Ausgang auf H-Pegel schaltet.
Außerdem gilt nicht der sonst übliche Zusammenhang Q 1 = Q 2 (logischer Entwurf).
^ Deshalb wird oft diese Belegung nicht zugelassen (Beschränkung 1.Art).
5. Rückgekoppelte Kippschaltungen
3
)OLSIORSDXV1$1'*DWWHUQ
Für ein Flipflop aus NAND-Gattern gelten grundsätzlich die gleichen Aussagen unter Beachtung
der logischen Zusammenhänge.
Schaltungstechnisch handelt es sich bei dem Basis-Flipflop um einen rückgekoppelten zweistufigen
PLWJHNRSSHOWHQ Verstärker (Bild 5.1.2). Die Übertragungskennlinie der Anordnung bei geöffneter
Rückführung zeigt nichtinvertierendes Verhalten, im Übergangsbereich läßt sich eine relativ große
Spannungsverstärkung erkennen (Steilheit der Kennlinie).
Ua
T
Ua = U e
C
≥1
Ue
B
≥1
Q
S=L
Ua
A
R=L
Ue
Bild 5.1.2: Rückgekoppelter Verstärker aus NOR-Gattern mit Übertragungskennlinie
Wird die Rückführung über Taste T geschlossen, so gilt Ua = Ue (Gerade in Bild 5.1.2). Es können
sich nur solche Arbeitspunkte einstellen, die den Schnittstellen beider Kennlinien entsprechen.
^ Der Arbeitspunkt B ist instabil, da wegen der Verstärkung bereits kleine Änderungen der
Eingangsgröße Ue relativ große Änderungen der Ausgangsspannung Ua bewirken. Das führt
über die Rückkopplung zu einer Erhöhung bzw. Verringerung von Ue und schließlich zum
Schalten in den stabilen Arbeitspunkt C bzw. A.
Die zum Setzen bzw. Rücksetzen des Flipflops benötigten Steuersignale S und R brauchen jeweils
nur kurzzeitig anzuliegen (10 ... 100 ns). Ist das Flipflop einmal umgekippt, haben weitere Signale
am gleichen Eingang keinen Einfluß mehr.
^ Diese Eigenschaft der Schaltung läßt sich hervorragend zum Unterdrücken von sogenannten
6FKDOWHUSUHOOXQJHQ ausnutzen (Bild 5.1.3). Das Flipflop wird vom ersten an einem Eingang
nach Schalterbetätigung eintreffenden Impuls eingestellt, weitere Impulse infolge Prellungen
am gleichen Eingang bleiben unwirksam.
UCC
H
S
&
Q
S
R
L
H
X
&
R
L
H
Q
L
Bild 5.1.3: Entprellen eines mechanischen Schalters durch R S − Flipflop
4
5. Rückgekoppelte Kippschaltungen
7DNWJHVWHXHUWH)OLSIORSV
Für viele Anwendungen werden Flipflops gefordert, die nur V\QFKURQ mit einem Taktsignal
logische Signale übernehmen. Dazu werden YRU die Eingänge der Basis-Flipflops entsprechende
Ansteuerschaltungen geschaltet. Es gibt grundsätzlich zwei Möglichkeiten zur taktgesteuerten
Übernahme der an den Vorbereitungseingängen anliegenden Information (Bild 5.1.4):
^ Taktzustandssteuerung (statische Taktung),
^ Taktflankensteuerung (dynamische Taktung).
E - Tor
_
S
S
&
Z - Speicher
G3
&
G1
Ausgangs-FF
_ G5
S’
&
Q1
t
Q
1
R’
C
_
R
t
G2
R
&
&
_ &
R’
Q1
G6
G4
_
S
Flankensteuerung
_
S
SA
&
&
C
Q2
_
R
t
t
C
_
R
t
&
Zustandssteuerung
&
Q2
Q2
_
R
A
t
Bild 5.1.4: Taktgesteuerte RS -Flipflops mit Impulsdiagramm
7DNW]XVWDQGVVWHXHUXQJ
Bei taktzustandsgesteuerten Flipflops (Bild 5.1.4, unten) wird die Eingangsinformation von den
Vorbereitungseingängen während der gesamten H- bzw. L-Phase des Taktsignales C übernommen.
Signaländerungen an den Eingängen wirken sich praktisch sofort am Flipflop-Ausgang aus (vgl.
Impulsdiagramm).
^ Wegen dieser Eigenschaft sind Kettenschaltungen mit diesen Flipflops kritisch, da eine
Änderung am Eingang der ersten Stufe durch die gesamte Schaltungsanordnung durchläuft
(Race-Problem). Damit sind diese Flipflop-Typen QLFKW geeignet zum Aufbau von Zählern,
Schieberegistern und Frequenzteilern.
5. Rückgekoppelte Kippschaltungen
5
7DNWIODQNHQVWHXHUXQJ
Bei Taktflankensteuerung wird in das Flipflop genau die Information übernommen, die unmittelbar
YRU und ZlKUHQG der auslösenden Flanke des Taktsignales C an den Vorbereitungseingängen
anliegt. In der Zeit zwischen zwei aktiven Schaltflanken ist das Flipflop unempfindlich gegenüber
Signaländerungen und damit auch gegenüber Störungen an den Eingängen (Bild 5.1.4, oben).
Meist werden diese Flipflop-Typen mit dynamischen Zwischenspeichern realisiert. Durch geeignete
Maßnahmen (Rückkopplung) werden die Dateneingänge sofort nach der Taktflanke blockiert Dabei
werden hohe Anforderungen an die Flankensteilheit des Taktsignales gestellt.
Das Impulsdiagramm in Bild 5.1.4 zeigt deutlich die Störunterdrückung bei Flankensteuerung:
Für C = L ist der Zwischenspeicher gesperrt, die Ausgänge der Gatter G3, G4 haben H-Pegel.
Damit sind die beiden Gatter G1, G2 geöffnet und am Zwischenspeicher liegt die invertierte
Eingangsinformation (S, R). Das Ausgangs-Flipflop befindet sich im Speicherzustand. Mit einer
LH-Flanke am Takteingang C wird der Zwischenspeicher entsprechend der Eingangsbelegung an S
und R gesetzt. Dabei wird ein Ausgang auf L-Pegel geschaltet und so das Eingangstor G1 oder G2
gesperrt. Ein jetzt erfolgender Signalwechsel an S und/oder an R hat in der gesamten Taktzeit
keinen Einfluß mehr auf den Zustand des Zwischenspeichers.
Das Eingangstor (G1, G2) sperrt erst eine Gatterlaufzeit nach Eintreffen der aktiven LH-Flanke des
Taktsignales C. Innerhalb dieser 9RUKDOWH]HLW tH müssen zur Vermeidung von Störungen alle
anliegenden Signale (S, R, C ) konstant bzw. innerhalb der zulässigen Pegelbereiche des logischen
Signales bleiben, welches vor der Taktflanke anlag. Die Pulszeit tP des Taktsignals muß größer sein
als die Vorhaltezeit tH . Das Ausgangs-Flipflop wird frühestens eine Gatterlaufzeit nach dem Ende
der LH-Flanke des Taktsignales C gesetzt (Laufzeit G3 - G5 bzw. G4 - G6). Mit der HL-Flanke an
C wird der Ausgangszustand des Zwischenspeichers wiederhergestellt, ohne das Ausgangs-FF zu
beeinflussen (Speicherzustand).
^ Das flankengesteuerte RS-Zähl-Flipflop (Bild 5.1.4, oben) kann in ein flankengetriggertes
D-Zähl-Flipflop verwandelt werden, indem der Eingang R = D gesetzt und das Signal S vom
Ausgang des Gatters G2 abgenommen wird.
0DVWHU6ODYH)OLSIORSV
Das wesentliche Kennzeichen sogenannter Master-Slave-Flipflops ist die Kettenschaltung von zwei
]XVWDQGVJHVWHXHUWHQ Flipflops. Dabei werden die beiden Stufen (Master, Slave) von zueinander
entgegengesetzten Taktzuständen gesteuert.
Durch unterschiedliche Ansprechschwellen der Takteingangsstufen (Diode D in Bild 5.1.5) wird
gewährleistet, daß zu jedem Zeitpunkt des Taktimpulses nur ein Flipflop Information aufnehmen
kann. Damit sind die Ausgänge (Q, Q ) vollständig von den Eingängen (S, R bzw. V, W)
entkoppelt. Ein wichtiges Merkmal ist, daß an die Flankensteilheit des Taktsignales C keine hohen
Anforderungen gestellt werden.
Zwischenspeicher
V
C
W
Master
1
D
Slave
Schaltschwellen
UC
Hauptspeicher
Q
_
Q
2
3
4
1
t
Taktsignal C
Bild 5.1.5: Master-Slave-Prinzip, Wirkung der (Zweiflanken-)Taktsteuerung
1 Sperren Slave, 2 Eingangsinformation (V, W) in Master übernehmen,
3 Trennung Eingang - Master, 4 Übernahme Master - Slave
6
5. Rückgekoppelte Kippschaltungen
Master-Slave-Flipflops werden manchmal auch als ]ZHLIODQNHQJHVWHXHUWH Flipflops bezeichnet,
weil beide Taktflanken an der Steuerung beteiligt sind. Prinzipielle Ausführungsformen als RS- und
als JK-Master-Slave-Flipflop zeigt Bild 5.1.6.
S
&
G1
&
Q’
G3
&
&
C
1
RS - MS - Flipflop
&
&
G2
&
&
G4
S
J
&
Q’
G3
&
G1
&
1
Q
JK - MS - Flipflop
&
&
Q
&
R
C
Q
G2
&
Q
&
G4
K
R
Bild 5.1.6: Master-Slave-Flipflops
JK-Master-Slave-Flipflops unterscheiden sich nur geringfügig von der Struktur eines RS-MS-FF.
Besonders wichtig sind die kreuzweisen Rückführungen von den Ausgängen auf die Eingangsgatter
G1 und G2. Sie bewirken, daß die Beschränkung der Eingangsbelegungen des Basis-RS-Flipflops
aufgehoben werden können. Für J = K = H ist stets nur ein Gatter G1 oder G2 geöffnet.
^ Ist Q = H, so wird bei J = H mit der LH-Flanke des Taktsignales C der Master auf Q' = H
gesetzt. Mit der Rückflanke von C wird danach der Slave-Ausgang auf Q = H gesetzt und
wegen Q = L wird nun Gatter G1 gesperrt und Gatter G2 geöffnet.
^ Beim nächsten Taktimpuls (bei K = H) wird zuerst der Master und danach der Slave wieder
zurückgesetzt (Q = L).
Das Flipflop arbeitet damit als %LQlUXQWHUVHW]HU bzw. )UHTXHQ]WHLOHU (2 : 1), denn es schaltet bei
jedem Taktimpuls in den entgegengesetzten Ausgangszustand (Kippübergang).
^ Für alle anderen Belegungen an J und K arbeitet das JK-Flipflop wie das RS-Flipflop.
5. Rückgekoppelte Kippschaltungen
7
/RJLVFKHV9HUKDOWHQYRQ)OLSIORSV
Das unterschiedliche logische Verhalten der Flipflop-Typen ist aus ihren Schaltbelegungstabellen
(Analysetabellen) bzw. aus ihren charakteristischen Gleichungen zu erkennen (Tafel 5.2). Die meist
verwendeten Typen sind RS-, JK-, D- und T-Flipflop.
^ Das getriggerte 7)OLSIORS (Untersetzer-FF) ist ein Sonderfall des JK-FF mit J = K = H. Der
Vorteil liegt in der verringerten Anzahl von Eingangsanschlüssen der Schaltkreise.
^ Das sogenannte ')OLSIORS (delay-flipflop, data-flipflop) wirkt grundsätzlich wie ein digitales
Verzögerungsglied (Bild 5.1.7). Ein Eingangssignal an D wird erst mit der nächsten aktiven
Taktflanke an den Ausgang übertragen. Diese Eigenschaft läßt sich u.a. zur Synchronisation
verschiedener Signale ausnutzen.
^ D-Flipflops werden außerdem als Grundbausteine zum AufbauVWDWLVFKHU RAM-Schaltkreise
verwendet (Elementarspeicherzelle; vgl. auch Abschnitt 9).
1
&
X1
C
&
_
Q
&
Q
&
X1
&
_
Q
&
Q
C
&
X2
D
X2
&
D
Varianten von D-Flipflops
Xi
Yi
&
&
we
&
G1
C1
_
d out
Q
G2
d in
1D
D-Flipflop als Elementarspeicherzelle
Bild 5.1.7: D-Flipflop, Anwendung als Speicherzelle
Die verschiedenen Flipflop-Typen können logisch ineinander umgewandelt werden. Dazu sind i.a.
zusätzliche Gatter nötig. Ausgangspunkt für solche Transformationen sind die Analysetabellen
bzw. die charakteristischen Gleichungen (vgl. Tafel 5.1.2).
^ Zu beachten sind dabei u.a. die Anforderungen der Taktsteuerung.
8
5. Rückgekoppelte Kippschaltungen
$QDO\VHWDEHOOHQ
FKDUDNWHULVWLVFKH*OHLFKXQJHQ
vollständig
verkürzt
Sn Rn Qn+1
Sn
Rn
Qn Qn+1
0
0
0
0
0
1
0
1
0
1
0
0
0
1
1
0
1
0
0
1
0
1
1
1
0
1
1
1
0
1
1
-
1
0
1
1
1
-
DQ
Qn Qn+1
0
0
Qn
n
Q n+1 = S n . R + Q n R
1
= (S n + Q n ) . R
Dn
Qn+1
')OLSIORS
Qn+1 = Dn
0
1
0
0
0
0
1
1
0
1
1
1
1
1
Tn
Qn+1
Qn Qn+1
0
0
0
1
0
1
0
Qn
1
1
0
1
1
0
1
Q
Jn Kn Qn Qn+1
n
0
0
0
TQ
56)OLSIORS
n
7)OLSIORS
n
n
Q n+1 = T n Q + T Q n
n
Jn
Kn Qn+1
0
0
0
0
0
1
0
1
0
0
Qn
0
0
1
1
0
1
0
0
0
1
0
1
1
1
1
0
0
1
1
0
1
0
1
1
1
1
0
1
0
1
1
1
Q
n
Tafel 5.1.2: Übersicht zu gebräuchlichen Flipflop-Typen
-.)OLSIORS
Q n+1 = Q n . K n + Q n . J n
5. Rückgekoppelte Kippschaltungen
9
3DUDOOHOXQG6FKLHEHUHJLVWHU
5HJLVWHU sind Flipflop-Anordnungen zur Speicherung binärer Daten und gehören damit in die
Klasse der Halbleiterspeicher (vgl. Abschnitt 9). Wie alle Speicher führen auch Register die drei
Funktionen 6FKUHLEHQ /HVHQ und 6SHLFKHUQ aus. Ihre Speicherkapazität ist im Vergleich zu
0DWUL[VSHLFKHUQnur gering. Nach der Art der Informationseingabe (Schreiben) bzw. Informationsausgabe (Lesen) wird zwischen 3DUDOOHOUHJLVWHUQ und 6FKLHEHUHJLVWHUQ unterschieden.
3DUDOOHOUHJLVWHU
Parallelregister sind schaltungstechnisch gesehen einzelne Flipflops mit einem gemeinsamen Takt.
Alle Bits eines Datenwortes werden somit gleichzeitig, also parallel, geschrieben bzw. gelesen. Die
zu übernehmenden Informationsbits werden an die Vorbereitungseingänge der einzelnen FlipflopStufen geführt und mit dem nächsten Taktimpuls an den Ausgang übertragen.
Da keine externen Rückführungen vom Ausgang auf den Eingang benötigt werden, können sowohl
taktzustandsgesteuerte als auch taktflankengesteuerte Flipflops mit und ohne Zwischenspeicher
eingesetzt werden. Am häufigsten findet man in Registern das einfache D-Flipflop (als echtes
D-Flipflop und als D-Latch). Die Information steht immer bis zum nächsten Taktimpuls statisch an
den Ausgängen bereit.
Typische Anwendungsfälle für Parallelregister sind die Zwischenspeicherung von Daten, z.B.
Zählergebnisse, und die Pufferung von Daten beim Datenaustausch über Bussysteme. Für jeden
Speicherplatz (Bit) wird eine Eingangs- und eine Ausgangsleitung benötigt. Parallelregister eignen
sich deshalb nur als (Zwischen-) Speicher mit kleiner Speicherkapazität.
^ Parallelregister-Schaltkreise werden typisch mit Tristate-Ausgangstreibern ausgeführt, um sie
busfähig zu machen.
D0
Q0
D1
1D
C
Q1
D2
1D
C
Q2
D3
1D
C
Q3
1D
C
C
a) Parallelregister (Prinzipschaltung)
DI 7
:
D
C
:
B
A
OE
≥1
1
:
:
:
:
DI 0
STB
DO 7
DO 0
D
C
≥1
DIR
OE
b) 8-Bit-Bustreiber mit Speicher (8282/83)
Bild 5.1.8: Parallelregister
c) Bidirektionaler Bustreiber (8286/8287)
10
5. Rückgekoppelte Kippschaltungen
6FKLHEHUHJLVWHU
Ein 6FKLHEHUHJLVWHU besteht aus einer Kettenschaltung von Flipflops (Bild 5.1.9), die Struktur der
Schaltung hat große Ähnlichkeit mit Zählerschaltungen (vgl. Abschnitt 7).
Die Information jeder Speicherzelle wird mit jedem Taktimpuls auf der JHPHLQVDPHQTaktleitung
in eine benachbarte Speicherzelle JHVFKREHQ. Die Information kann in ein Schieberegister sowohl
seriell oder parallel eingegeben als auch ausgegeben werden. Bei serieller Ein-/Ausgabe besteht ein
direkter Zugriff nur zur ersten/letzten Speicherzelle der Kette. Die mittlere Zugriffszeit ist deshalb
größer als bei Parallelregistern oder Matrixspeichern.
^ Schieberegister können nur V\QFKURQ betrieben werden, da Flipflops in der Kettenschaltung
ggf. auch dann kippen müssen, wenn der Ausgang des Vorgänger-Flipflops nicht umschaltet.
Die einfachsten Schaltungen ergeben sich beim Einsatz von D-Flipflops, allgemein können
alle Flipflop-Typen mit Zwischenspeicher verwendet werden.
Q0
D
1D
C
R
Q1
1D
C
R
Q2
1D
C
R
Q3
1D
C
R
C
RES
C
D
1
1
0
0
1J
C
1K
D
Q0
1J
C
1K
Q
C
Q1
Variante mit JK-Flipflops
Q2
Q3
Bild 5.1.9: Schieberegister mit D-Flipflops (JK-Flipflops)
Die 6FKLHEHULFKWXQJ (links/rechts) läßt sich durch geeignete Zusatzschaltungen umschalten. Ein
universelles Schieberegister mit allen möglichen Varianten der Ein-/Ausgabe und Steuerung
benötigt sehr viele Anschlüsse (Gehäusegröße des Schaltkreises). Es werden deshalb zahlreiche
Varianten von Schieberegistern in allen Schaltkreisfamilien angeboten. Wichtige Einsatzfälle sind:
^
^
^
^
^
^
Einsatz bei der Serien-Parallel- und Parallel-Serien-Wandlung von Datenströmen,
Realisierung von Taktgeneratoren (als Ringzähler),
Zwischenspeicher für Anzeigesysteme, Rechner usw.,
Digitale Verzögerung,
Zeitraffung bzw. Zeitdehnung (mit verschiedenen Taktfrequenzen),
Aufnahme schneller Eingangsfolgen in Testsysteme (ECL, MESFET).
5. Rückgekoppelte Kippschaltungen
11
6FKPLWW7ULJJHU6FKZHOOZHUWVFKDOWHU
Schmitt-Trigger sind bistabile 6FKZHOOZHUWVFKDOWHU mit+\VWHUHVH. Das Ausgangssignal wird beim
Über-/Unterschreiten von (LQJDQJV6FKZHOOZHUWHQzwischen dem H- und L-Pegel umgeschaltet.
^ Die Differenz zwischen den beiden Eingangs-Schwellwerten wird als +\VWHUHVHVSDQQXQJUH
bezeichnet.
Schwellwertschalter werden u.a. als ,QWHUIDFH zwischen der Analog- und Digitaltechnik sowie zur
Flankenregenerierung eingesetzt. Meist werden spezielle Schaltkreise oder Analogkomparatoren
verwendet. Eine Realisierung mit logischen Gattern zeigt Bild 5.2.1. Die Kettenschaltung der
beiden Gatter wirkt wie ein nichtinvertierender Verstärker (im Übergangsbereich der Gatter).
R3
R2
Ua
Ua H
R1
Uv
Ue
1
UI
U
H
1
Ua
GND
Ua L
Ueu
Ue
U eo
Bild 5.2.1: Schwellwertschalter mit Logik-Gattern
Aus der Knotengleichung für UI
3
U
U
U
U
U I 1 − e − a − V − I ein = 0 mit I ein = I
R1 R2
R3
R ein
i=1 R i
(5.2.1)
folgt an der Umschaltschwelle UI = US :
U eu = −U aH
R1
R
R
R
R
+ U S (1 + 1 + 1 + 1 ) − U V 1 ,
R2
R2
R3
R ein
R3
(5.2.2)
U eo = −U aL
R1
R
R
R
R
+ U S (1 + 1 + 1 + 1 ) − U V 1 ,
R2
R2
R3
R ein
R3
(5.2.3)
U
Dabei ist R S = I Sein der Eingangsstrom des Gatters an der Umschaltschwelle.
ein
Für die Hysteresespannung UH folgt
R
U H = U eo − U eu = (U aH − U aL ) R 1 .
2
(5.2.4)
^ Mit Hilfe der Verschiebespannung UV können die Schwellspannungen Ueu , Ueo verschoben
werden, ohne die Hysteresespannung UH zu verändern.
Eine genauere Festlegung der Umschaltpegel (Toleranzen der Ausgangspegel) ist mit einem
Präzisions-Schmitt-Trigger nach Bild 5.2.2 möglich. Diese Schaltung läßt sich mit angebotenen
Schaltkreisen einfach realisieren (z. B. Timer-Schaltkreis 555, Doppelkomparator NE 521).
12
5. Rückgekoppelte Kippschaltungen
U2
x2
+
-
x1
&
y
K2
Ue
x2
Ue
U1
-
&
x1
+
y
Ue
y
K1
Einschaltschwelle: U eH = U2
Ausschaltschwelle: U eL = U 1
}
U1
für U2 > U1
U2
Ue
Bild 5.2.2: Präzisions-Schmitt-Trigger mit Analogkomparatoren
Für niedrige Frequenzen ist der Timer-Schaltkreis 555 recht universell einsetzbar. Je nach äußerer
Beschaltung kann er z.B. als Schmitt-Trigger (Pin 2 - 6), als Monoflop oder als Multivibrator
eingesetzt werden. Bild 5.2.3 zeigt die Innenschaltung und das Pinout dieses Timer-Schaltkreises.
Unter der Bezeichnung 7555 wird auch eine CMOS-Version angeboten. Typische Daten (LM 555):
Versorgungsspannung
Ausgangsspannung
UCC
U3L
U3H
I3zul
Ausgangsstrom
Schwellwerte bei UCC = 15 V:
^ Triggerschwelle
^ Schaltschwelle
^ Rückschwelle
Dynamische Kennwerte:
^ Anstiegszeit
^ Abfallzeit
= (4,5 ... 16) V
= 0,3 V
= UCC - 1,7 V bei | I3 | = 100 mA
< 200 mA
U2T = 5,02 V
U6T = 10,02 V
U4T = 0,56 V
tr
tf
= 90 ns
= 70 ns
V+
8
4
R
6
THRESHOLD
≥1
R
5
3
CONTROL
VOLTAGE
7
R
≥1
S
RESET
OUTPUT
DISCHARGE
Q
2
TRIGGER
R
1
555
GND
Im RESET-Zustand liegt der Ausgang auf L-Pegel
und der Entladetransistor ist gesättigt
Bild 5.2.3: Timer-Schaltkreis 555
5. Rückgekoppelte Kippschaltungen
13
0RQRIORSV
Monoflops sind Kippschaltungen mit HLQHP stabilen und HLQHP meta- bzw. quasistabilen Zustand
(Univibrator). Der quasistabile Zustand kann nur für eine begrenzte Zeit, die sogenannte Verweiloder +DOWH]HLWtH eingenommen werden. Wird ein Monoflop durch einen Eingangsimpuls in diesen
Zustand gebracht, so kippt der Ausgang nach Ablauf der Haltezeit in den stabilen Zustand zurück.
Im Interesse steiler Ausgangsflanken, unabhängig von der Steilheit des Eingangssignales, werden
oft rückgekoppelte Kippschaltungen zur Realisierung eingesetzt. Das monostabile Verhalten wird
durch eine zeitabhängige Rückführung erreicht (meist ein RC-Glied).
Typische Anwendungsfälle für Monoflops sind z.B. die Erzeugung breiter Ausgangsimpulse zur
Ansteuerung von Relais und der Einsatz in Überwachungseinheiten (Laufzeitkontrolle).
0RQRIORSPLW/RJLNJDWWHUQ
Ein Monoflop läßt sich aus zwei NAND- oder zwei NOR-Gattern aufbauen. Bild 5.3.1 zeigt zwei
Schaltungsvarianten mit NAND-Gattern.
e
1
&
e1
Q1
C
t
D
&
e
R
Q1
Q2
T
t
2
e2
&
e1
C e
2
Q1
R
&
US
Q2
t
Q2
D
t1 t2
T
t3
t4 t5
T
t
Bild 5.3.1: Monoflop mit NAND-Gattern und Differenzierglied, Zeitverläufe
Im Ruhezustand gilt: Q1 = L, Q2 = H, e1 = H, e2 = L (Widerstand R entsprechend bemessen, vgl.
dazu auch Abschnitt 8.6 !).
^ Mit einer HL-Flanke an e1 wird Ausgang Q1 auf H-Pegel geschaltet. Dieser Spannungssprung
∆UQ = UQ1H - UQ1L wird in voller Höhe über den Kondensator C auf den Eingang e2 übertragen
(e2 = H) und Ausgang Q2 schaltet auf L-Pegel. Über die Rückkopplung wird dieser Zustand
gehalten, auch dann, wenn das Eingangssignal e1 wieder in den Ruhezustand zurückkehrt.
^ Der Kondensator C wird nun über den Widerstand R und Ausgang Q1 aufgeladen. An
Eingang e2 wird dabei die Spannung in Richtung ihres stationären Anfangswertes (L-Pegel)
abgebaut. Nach Ablauf der Haltezeit T = t H erreicht die Spannung an Eingang e2 den Wert
Ue2 = US (Umschaltschwelle des Gatters). Ausgang Q 2 schaltet zurück auf Q2 = H. Ausgang
Q 1 behält den H-Pegel, bis am Eingang e1 = H auftritt.
^ Ein neuer Zeitvorgang mit den gleichen Anfangswerten kann nach der Erholzeit tE = t4 - t3
gestartet werden.
14
5. Rückgekoppelte Kippschaltungen
Der Zustand e2 = H, Q 1 = L existiert statisch nicht, damit ist die Gleichspannungskopplung von Q 1
auf den Eingang des zweiten Gatters in Bild 5.3.1 (oben) überflüssig. Beide Schaltungen haben das
gleiche Zeitverhalten. Für die Spannung am Eingang e2 bzw. die Haltezeit tH gilt
U e2 (t) = U e2L + U Q e
−
t − t1
RC ,
U Q
U S − U e2L
T = t H = RC ln
(5.3.1)
mit U Q = (U Q1H − U Q1L ) .
(5.3.2)
Voraussetzung für die beschriebene Funktion ist, daß die stationäre Spannung an e2 den maximalen
Eingangs-L-Pegel nicht überschreitet. Damit gilt als Bemessungsvorschrift für den Widerstand R:
R >
U e2L max
.
I e2L max
(5.3.3)
^ Die Diode D in den angegebenen Schaltungen verhindert negative Überspannungen am
Eingang e2 und verkürzt gleichzeitig die Erholzeit.
^ Äquivalente Schaltungen können mit NOR-Gattern realisiert werden.
Wesentlich bessere und stabilere Eigenschaften lassen sich mit integrierten Monoflop-Schaltkreisen
erreichen, die in den verschiedenen Schaltkreisfamilien angeboten werden (z. T. mit Kompensation
von Temperatur- und Betriebsspannungseinflüssen, stabile und genauere Umschaltschwellen).
Durch Anschalten eines externen RC-Gliedes lassen sich die Haltezeiten in großen Bereichen
einstellen (typisch tH = 10 ns ... 100 s). Geeignete Schaltkreise sind z. B. :
^ LS-TTL: 74 LS 121, 74 LS 123; LM 555;
^ CMOS: CD 4538, 74 HCT 123; ICM 7555.
U CC
8
R1
4
R
6
5
+
R
RES
U2T
≥1
3
-
OUT
7
+
S
≥1
t
U3
R
2
U2
tH
Q
-
C
t
R
1
GND
R 1 = 1 k ... 1 M, C = 1 nF ... 10 F
Bild 5.3.2: Monoflop mit Timer-IS 555
t H = CR1 ln 3
5. Rückgekoppelte Kippschaltungen
15
5HWULJJHUEDUH0RQRIORSV
In den o.g. Monoflopschaltungen wird die metastabile Phase von der aktiven Flanke des HUVWHQ
Steuerimpulses ausgelöst; weitere Impulse innerhalb der Haltezeit tH bleiben wirkungslos.
Soll die Haltezeit aber erst vom OHW]WHQ Impuls einer Impulsgruppe an gerechnet werden, so müssen
sogenannte UHWULJJHUEDUHMonoflops eingesetzt werden.
^ Jeder am Triggereingang eintreffende Impuls setzt nun das Monoflop auf den Anfangswert
des quasistabilen Zustandes zurück. Der Ausgang schaltet erst um die Haltezeit tH verzögert
QDFKdemOHW]WHQImpuls einer Impulsgruppe in den stabilen Ruhezustand.
Typische Anwendungen solcher retriggerbarer Monoflops sind z.B. Laufkontrollen für Motoren,
Überwachung von Programmzyklen (watch-dog-Schaltungen) usw. Geeignete Schaltkreise sind in
Abschnitt 5.3.1 bereits angegeben.
Bild 5.3.3 zeigt ein retriggerbares Monoflop mit dem Timer-Schaltkreis 555. Dabei wird dessen
Eigenschaft als Präzisions-Schmitt-Trigger ausgenutzt.
^ Zur Entladung des Kondensators C muß hier ein H[WHUQHU Transistor T verwendet werden.
Ue
UCC
8
R
6
2
T
Ue
C
t
U2
3
U5
OUT
U3
tH
t
1
t
Bild 5.3.3: Retriggerbares Monoflop mit dem Timer-Schaltkreis 555
=XU)XQNWLRQVZHLVHGHU6FKDOWXQJ
Steigt die Kondensatorspannung bei gesperrtem Transistor T über den Wert U C P U 5 = 23 U CC , so
wird das interne Flipflop gesetzt und damit Ausgang OUT auf tiefes Potential geschaltet (U3 = L).
Wird nun der Transistor T über einen positiven Triggerimpuls Ue leitend gesteuert, so entlädt sich
der Kondensator C und die Spannung U2 = U6 sinkt unter die Triggerschwelle U 2 > U 2T = 13 U CC
ab. Das Flipflop wird zurückgesetzt und der Ausgang OUT geht auf hohes Potential.
^ Mit jedem weiteren Triggerimpuls innerhalb der Haltezeit tH wird dieser Anfangszustand des
quasistabilen Zustandes wieder hergestellt. Mit den spezifischen Werten des Schaltkreises
ergibt sich die Haltezeit tH näherungsweise zu
t H = C . R 1 ln 3.
(5.3.4)
16
5. Rückgekoppelte Kippschaltungen
,PSXOVJHQHUDWRUHQDVWDELOH0XOWLYLEUDWRUHQ
Zur Erzeugung von %LQlUIROJHQ(Taktgeber, Testsignalgeber) werden Impulsgeneratoren benötigt.
Sie werden meist aus rückgekoppelten Kippschaltungen RKQH stabilen Zustand realisiert.
Frequenz und Tastverhältnis der Impulsfolge werden durch die Schaltungsdimensionierung
festgelegt. Außer ggf. einem Start-/Stop-Signal werden keine weiteren Eingangssignale benötigt,
d.h. die SchaltungOlXIWIUHL (Generator, astabiler Multivibrator).
Für einfache Anwendungen werden RC-Glieder zur Festlegung der Zeitabhängigkeiten verwendet.
Bei höheren Ansprüchen an die Genauigkeit und bei hohen Schaltfrequenzen werden spezielle
Oszillatorschaltungen (z. B. 74LS124, 74LS626, ..., 555) und/oder 4XDU]JHQHUDWRUHQ eingesetzt.
,PSXOVJHQHUDWRUHQPLW*DWWHUVFKDOWNUHLVHQ
Eine sehr einfache Schaltung eines Impulsgenerators mit Gatterschaltkreisen zeigt Bild 5.4.1. Sie
verwendet nur einen Negator mit Hystereseeingang (Schmitt-Trigger) und ein RC-Glied. Ein
zweites Gatter (Treiber) kann zur verbesserten Signalauskopplung nachgeschaltet werden.
UC
R
UEH
UEL
UC
C
UA
UA
T
t
t1 t2
z. B. 74LS14
t
Bild 5.4.1: Impulsgenerator mit Schmitt-Trigger-Schaltkreis und RC-Glied
Die Kondensatorspannung UC schwingt frei (nach einer Anlaufphase beim Einschalten von UCC)
zwischen den beiden Schaltschwellen UEH und UEL des Gatters hin und her, der Ausgang schaltet
entsprechend. Für die Periodendauer T der Ausgangsspannung ermittelt man
U −U
U −U
T = t 1 + t 2 = R . C . ln U EL − UAH UEH − U AL .
EH
AH
EL
AL
(5.4.1)
Mit TTL-Bausteinen (z. B. 74LS14) eignet sich die Schaltung für Frequenzen 1 Hz > f > 10 MHz .
Für die Bemessung des Widerstandes R gilt dabei:
^ Der minimale Wert für R wird durch den zulässigen Ausgangsstrom bestimmt.
^ Der maximale Wert von R wird durch die untere Umschaltschwelle UELmax des Gatters sowie
den Eingangsstrom bestimmt. Für TTL-Gatter gilt 100 > R > 470 .
Eine Schaltung mit dem Timer-Schaltkreis 555 zeigt Bild 5.4.2. Das Tastverhältnis der Impulsfolge
ist zunächst stark unsymmetrisch (vgl. angegebene Gleichungen). Wird Widerstand R2 mit einer
Diode überbrückt, kann bei R1 = R2 >> RF ein Tastverhältnis nahe 1:1 erzeugt werden.
5. Rückgekoppelte Kippschaltungen
U
CC
8
4
R
R1
6
+
5
R2
17
R
≥1
RES
3
-
OUT
7
D
DISCHARGE
R
+
2
S
≥1
Q
R
C
1
GND
Bild 5.4.2: Astabiler Multivibrator mit Timer-Schaltkreis 555
Für die Schaltzeiten erhält man (ohne Diode):
T 1 = (R 1 + R 2 )C . ln
U CC − U 2T
U CC − U 5
T 2 = R 2 C . ln
bzw.
U5
U 2T
T = T 1 + T 2 = (R 1 + 2R 2 ) . C . ln 2 .
(5.4.2)
(5.4.3)
Eine modifizierte Anschaltung des Widerstandes R1 ist beim CMOS-Timer-Schaltkreis 7555 üblich,
Widerstand R2 entfällt (Bild 5.4.3). Damit wird das Tastverhältnis nahezu symmetrisch.
U
CC
8
4
R
6
5
+
R
≥1
3
-
+
C
OUT
R1
R
2
RES
S
≥1
7
DISCHARGE
Q
R
1
GND
Bild 5.4.3: Astabiler Multivibrator mit CMOS-Timer-Schaltkreis 7555
18
5. Rückgekoppelte Kippschaltungen
Einen Impulsgenerator mit speziellen Monoflop-Schaltkreisen zeigt Bild 5.4.4 (z. B. 74 LS 123).
^ Die Besonderheit der Schaltung liegt in der Möglichkeit, die beiden Größen Frequenz und
Tastverhältnis XQDEKlQJLJ voneinander einzustellen.
R1
U CC
C1
R2
UCC
C2
A T
X
A T
Q
Q
Q
1
X2
X2
X1
B
Tv
B
Q
X2
Bild 5.4.4: Impulsgenerator mit Monoflop-Schaltkreisen
Das linke Monoflop bildet den eigentlichen Impulsgenerator mit einer Frequenz f von etwa
f=
3
R1C1
für 0, 1 Hz > f > 4 MHz .
(5.4.4)
^ Dabei können sowohl R1 = (5 ... 50) kΩ als auch C1 = 100 pF ... 100 µF in weiten Grenzen
gewählt werden.
^ Am Ausgang X 1 treten unabhängig von f, R1 und C 1 ca. 20 ns breite Impulse auf (Umschaltund Verzögerungszeit des Schaltkreises).
^ Mit dem zweiten Monoflop läßt sich daraus unabhängig von der Frequenz f über R2, C2 eine
Impulsfolge mit einem fast beliebigen Tastverhältnis einstellen.
5. Rückgekoppelte Kippschaltungen
19
4XDU]JHQHUDWRUHQ
Multivibratoren für hohe Frequenzen ( f > 500 kHz) und/oder mit guter Frequenzstabilität werden
meist mit 4XDU]HQ in der Rückführung rückgekoppelter Kippschaltungen realisiert.
^ Die Digitalbausteine werden in diesen Quarzschaltungen durch eine Gegenkopplung im
Übergangsbereich(steiler Bereich der Übertragungskennlinie) TXDVLDQDORJ betrieben.
Bild 5.4.5 zeigt beispielhaft zwei Realisierungen mit TTL- bzw. CMOS-Gattern. Die angegebene
Bemessung ist als Orientierung zu verstehen.
^ Mit den Trimmern CT ist ein =LHKHQ (Feinabgleich) der Schwingfrequenz möglich.
^ Für den praktischen Betrieb empfiehlt sich eine Entkopplung von Zeit- und Lastschaltung.
Dazu wird der eigentlichen Generatorschaltung ein Trennverstärker in Gestalt eines weiteren
Gatters oder Treibers nachgeschaltet (Bild 5.4.5).
CT
Quarz
80 pF
&
R1(10 M)
≥1
&
S
R2
22 k
R
≥1
&
120
Y
Quarz
C
T
20 pF
C1
20 pF
Y
S
Treiber
Treiber
Serienresonanz-Quarz
Parallelresonanz-Quarz
Bemessung für TTL:
500 Hz < f < 5 MHz
Resonanzwiderstand RS < 250 Ω
Bemessung für CMOS (HEF 4001 B)
Bild 5.4.5: Quarzgeneratoren mit logischen Gattern
=XU6FKZLQJXQJVHU]HXJXQJPLW4XDU]HQ
Ein Quarz kann als DQDORJHU6FKZLQJNUHLV aus einer Reihenschaltung von Induktivität L, Reihenbzw. Serienkapazität CS und Widerstand RS sowie einer dazu parallelliegenden Parallelkapazität CP
(Halterung) beschrieben werden. Dabei gilt CP > CS . Die Anordnung zeigt sowohl 6HULHQUHVRQDQ]
als auch 3DUDOOHOUHVRQDQ]. Beide werden in Multivibratorschaltungen ausgenutzt (vgl. Bild 5.4.5).
C1
U1
i
L
U2
CS
C1
U2
u
U
1
RS
L
uR
u
CP
Bild 5.4.6: Vereinfachter Quarzgenerator, Quarz-Ersatzschaltung
C
20
5. Rückgekoppelte Kippschaltungen
Aus Bild 5.4.6 erhält man mit den Vereinfachungen RS = 0, C1 = 0, C P >> CS
U1 = u L + u C + U2
du
mit u L = L di
; i = C S C und damit
dt
dt
d 2u
U1 - U2 = u C + L C S dt 2C .
Die stationäre Lösung dieser Differentialgleichung 2. Ordnung ergibt
U C = U o sin *t
mit * = * S =
1
L CS
und
U1 = U2 .
Den Strom i = iC im Schwingkreis erhält man daraus zu
i C = * S U o C S cos * S t = U o
CS
cos * S t .
L
Bei Berücksichtigung von C1 und CP (weiter RS = 0) ergibt sich für die beiden Resonanzfrequenzen
* 2S =
1 (1 + C S ) bzw. * 2 = 1 1 + C S (2 + C 1 )
P
L CS
L CS
CP + C1
C1
CP
.
Für CP >> CS , C1 folgt wieder die oben ermittelte einfache Lösung * 2S =
1 .
L CS
Insgesamt läßt sich feststellen:
^ Die Eingangsspannung U1 folgt stets der Ausgangsspannung U2 . Der Strom iC ändert sich im
Rhythmus der Reihenresonanzfrequenz * S und die Schaltung schwingt bei dieser Frequenz.
^ Wegen der 9HUVWlUNHUZLUNXQJ (im Umschaltbereich) der beiden Negatorstufen wird der
Quarz ständig zum Schwingen angeregt.
6. Kodier- und Dekodierschaltungen
6.
1
Kodier- und Dekodierschaltungen
In digitalen Systemen wird die Information je nach Zweckmäßigkeit und technischem Aufwand in
unterschiedlichen Kodes dargestellt und verarbeitet.
{ Für Rechenzwecke ist ein Kode geeignet, der eine einfache Komplementbildung gestattet, für
eine Dezimalausgabe ist der 1-aus-10-Kode vorteilhaft,
{ für die Signalverarbeitung (z.B. AD-Umsetzung) werden sogenannte einschrittige Kodes
angewendet, für Datenübertragung fehlererkennende und /oder fehlerkorrigierende Kodes.
Zur Umwandlung zwischen den verschiedenen Kodes werden Kodewandler eingesetzt. Soll bei der
Signalverarbeitung aus einer größeren Anzahl von Signalen ein bestimmtes ausgewählt werden, so
lassen sich dafür sogenannte Multiplexer und/oder Demultiplexer einsetzen. Diese komplexen
digitalen Funktionseinheiten lassen sich logisch aus den bekannten einfachen Gatterfunktionen
erzeugen, werden aber meist als ein Baustein in integrierter Technik realisiert.
6.1
Kodewandler
Kodewandler sind meist kombinatorische Schaltungen, d.h. es existiert ein eindeutiger Zusammenhang zwischen den Ein- und Ausgangsbelegungen (Schaltbelegungstabelle, Schaltfunktion).
Kodewandler realisieren die Funktion eines speziellen Festwertspeichers (vgl. Abschnitt 9, ROM).
Dabei wird ein n-Bit-Eingangswort in definierter Weise in ein m-Bit-Ausgangswort umgewandelt.
Man spricht dann von allgemeinen Kodewandlern. Besonders häufig werden die beiden speziellen
Gruppen Dekodierer und Kodierer verwendet.
Dekodierer realisieren die Kodewandlung eines (meist dual kodierten) n-Bit-Eingangswortes in den
1-aus-m-Kode. Dabei nimmt genau ein Ausgangssignal den aktiven Zustand ein, während alle
anderen (m-1) Ausgänge im inaktiven Zustand bleiben, es gilt m [ 2 n .
Häufig wird für diese Bausteine auch die Bezeichnung Decoder verwendet.
Kodierer setzen ein am Eingang des Kodewandlers anliegendes Wort im 1-aus-m-Kode in ein
anders (meist dual) kodiertes Ausgangswort um.
n - Bit - Wort
m - Bit - Wort
Kodewandler
X/Y
Schaltsymbol nach DIN
Bild 6.1.1: Prinzip der Kodeumsetzung
6.1.1
Allgemeine Kodewandler
Allgemeine Kodewandler müssen oft selbst realisiert werden. Der logische Entwurf ist einfach:
Jede Stelle des Eingangskodes wird als Variable, jede Stelle des Ausgangskodes als Funktion
betrachtet. Aus der vollständigen Funktionstabelle werden ggf. über Minimierungsverfahren die
Realisierungsvorschriften ermittelt. Zur Realisierung werden dann logische Schaltungen, meist in
Form integrierter Schaltkreise, eingesetzt. Bild 6.1.2 zeigt häufig verwendete Kodes und Beispiele
zur Kodewandlung.
2
6. Kodier- und Dekodierschaltungen
Name des Kodes
Paritätsgenerator
Kodierung
8-4-2-1
Aiken
Gray
Stibitz
e4
e3
e2
e1
a
0000
0
1
0
1
0
1
-
0
0
0
0
0
0
0
1
0
1
0010
2
2
3
-
0
0
1
0
1
0011
3
3
2
0
0
0
1
1
0
0100
4
4
7
1
0
1
0
0
1
0101
5
-
6
0
1
0
1
0
0110
6
-
4
0
1
1
0
0
0001
3
0111
7
-
5
4
0
1
1
1
1
1000
8
-
(15)
5
1
0
0
0
1
1001
9
-
(14)
6
1
0
0
1
0
1010
-
-
(12)
7
1
0
1
0
0
1011
-
5
(13)
8
1
0
1
1
1
1100
-
6
8
9
1
1
0
0
0
1101
-
7
9
-
1
1
0
1
1
1110
-
8
(11)
-
1
1
1
0
1
1111
-
9
(10)
-
1
1
1
1
0
e4
CE
e4
e3
a4
0
e2 0
1
e1
1
BCD
4
e3
a3
a2
a1
Stibitz
e2
e1
&
a4
≥1
a3
&
&
=
Aiken
a2
a1
BCD
e4
e3
=
a1
=
e
2
a2
=
a
e1
Paritätsgenerator
Bild 6.1.2: Beispiele für Kodes und Kodewandler
Zu den allgemeinen Kodewandlern gehören auch Schaltungen, die einen Kode durch zusätzliche
Stellen auf Prüfbarkeit und/oder Korrigierbarkeit erweitern. Dabei bleiben die Informationsbits des
Kodes unverändert. Sie bestimmen jedoch, ob in den ergänzten Stellen eine Null oder eine Eins
eingetragen wird. So macht z.B. der Paritätsgenerator in Bild 6.1.2 eine 4-stellige Binärzahl durch
Ergänzung eines Paritätsbits auf gerade Quersummen prüfbar.
{ Beim Einsatz von Kodewandlern in allgemeinen logischen Systemen, z.B. in Steuerungen, ist
die Verzögerungszeit eine wichtige Kenngröße. Sie kann ggf. mehrere Gatterlaufzeiten
betragen (mehrstufige Logik).
{ Beim Wechsel der Eingangsinformation kommt es an den Ausgängen zwischenzeitlich zu
nichtdefinierten Belegungen! Das kann mittels zusätzlicher Steuereingänge (Strobe, Enable)
unterdrückt werden. Dabei sind entsprechende Vorhaltezeiten einzuhalten.
6. Kodier- und Dekodierschaltungen
6.1.2
3
Dekodierer (Decoder)
Dekodierer wandeln ein beliebiges n-Bit-Eingangswort in den 1-aus-m-Kode, dabei gilt m [ 2 n .
Beim 1-aus-m-Kode nimmt immer genau eine Stelle des Ausgangswortes den Wert H (oder L) an,
alle anderen (m-1) Stellen sind mit L (oder H) belegt.
Einige Beispiele für diese sogenannten 1-aus-m-Decoder zeigen nachfolgende Bilder.
{ Ein 1-aus-m-Decoder besitzt m Ausgänge und n = ld m Eingänge. Die Ausgänge werden
dabei typisch von 0 ... (m-1) durchnumeriert.
{ Ein Ausgang yi des Dekodierers nimmt genau dann den H-Pegel (bzw. L-Pegel) an, wenn die
eingegebene Dualzahl E = en-1 ... e0 gleich der Zahl i des betreffenden Ausganges yi ist.
&
e1
1
e
1
2
Y 0 = e1 e 2
&
Y 1 = e1 e 2
&
Y 2 = e1 e 2
&
Y Y Y Y
0 1 2 3
e1 e2
0 0
0 1
1
1
1
1
1
0
0
1
1
0
1
0
1
1
1
1
0
1
1
1
Y 3 = e1 e 2
Bild 6.1.3: 1-aus-4-Decoder (mit Low-aktiven Ausgängen)
{ Ein bekannter integrierter 1-aus-8-Dekodierer ist der Schottky-TTL-Schaltkreis 8205. Er wird
häufig in Mikrorechner- bzw. Mikroprozessor-Systemen eingesetzt (Bild 6.1.4).
Neben den drei Adreßeingängen (A0, A1,A2) besitzt er zusätzlich noch drei AND-verknüpfte
Aktivierungseingänge ( E 1 , E 2 , E 3 ). Ein aktivierter Ausgang Yi nimmt L-Potential an.
16
e0
e1
e2
E1
E2
E3
&
ES
A
B
C
1-aus-8
Decoder
EN
Signalflußbild
Bild 6.1.4: 1-aus-8-Decoder 8205
Y0
Y1
Y2
Y3
Y4
Y5
Y6
Y7
1 A0
2 A1
3 A2
4 E1
5 E2
6 E3
UCC
DC
8205
8
Y0
Y1
Y2
Y3
15
14
13
12
Y4
Y5
Y6
Y7
11
10
9
7
Pinout für ... 8205
4
6. Kodier- und Dekodierschaltungen
6.1.3
Kodierer
Kodierer setzen ein am Eingang anliegendes Wort im 1-aus-m-Kode in ein meist dual kodiertes
Ausgangswort um. Bei m Eingängen sind dazu n = ld m Ausgänge nötig. Bild 6.1.5 a) zeigt die
Schaltung eines Dezimal-zu-BCD-Kodierers (Telefon, Dezimaltastatur).
e
D
C
B
A
d
e
a3
a2
a1
a0
0
0
0
0
0
0
e0
0
0
0
0
1
0
0
0
1
1
e1
0
0
0
1
2
0
0
1
0
2
e2
0
0
1
0
3
0
0
1
1
3
e3
0
0
1
1
4
5
0
0
1
1
0
0
0
1
4
5
e4
e5
0
1
1
0
0
1
0
1
6
0
1
1
0
6
e6
1
1
0
0
7
0
1
1
1
7
e7
1
1
0
1
8
1
0
0
0
8
e8
1
1
1
0
9
1
0
0
1
9
e9
1
1
1
1
1
2
3
e0
≥1
A
≥1
B
4
5
6
7
≥1
C
8
≥1
D
9
a) Dezimal-zu-BCD-Kodierer
e1
e2
e3
e4
e5
e6
e7
e8
e9
≥1
≥1
≥1
≥1
a0
a1
a2
a3
b) (1-aus-10)-zu-Aiken-Kodewandler
Bild 6.1.5: Beispiele spezieller Kodierer
Der Entwurf von Kodierern scheint auf den ersten Blick recht mühsam, da für die vollständige
Funktionstabelle 2m Kombinationen der m Eingangsvariablen zu bilden sind. Bei 1-aus-m-Kodes
kann vereinfachend eine verkürzte Funktionstabelle benutzt werden:
{ Dazu wird jedem Wort des Ausgangskodes die Eingangsvariable ei mit dem logischen Wert 1
zugeordnet. Die Ausgangsfunktionen aj erhält man durch disjunktive Verknüpfung der ei , für
die die Ausgangsvariable aj in der betreffenden Spalte den Wert 1 annimmt.
Bei der Eingabe von 1-aus-m-Kodes über Tastaturen besteht die Gefahr der Kode-Verletzung durch
gleichzeitiges Betätigen von mehreren Tasten. Für solche Anwendungen kann man Prioritätskodierer entwickeln, bei denen die jeweils höchstwertige Eingangsvariable die Ausgangsbelegung
bestimmt. Auf die Angabe einer Schaltung wird an dieser Stelle verzichtet.
6. Kodier- und Dekodierschaltungen
6.2
5
Multiplexer und Demultiplexer
Nach DIN 44 300 sind Multiplexer Funktionseinheiten, die Nachrichten von einer Gruppe von
Nachrichtenkanälen an eine andere Gruppe von Nachrichtenkanälen übergeben /7/.
{ Ein Demultiplexer sendet die Eingangsinformation D an einen von n möglichen Ausgängen.
{ Ein Multiplexer überträgt eine von n Eingangsinformationen auf den Datenausgang.
Multiplexer und Demultiplexer sind also Datenselektoren. Die Auswahl eines Einganges bzw.
eines Ausganges erfolgt über entsprechende Steuer- bzw. Adreßeingänge. Meist wird gefordert, daß
die Übertragung erst bei einem zusätzlichen Übergabesignal (Strobe) erfolgt.
6.2.1
Demultiplexer
Mit einem Demultiplexer kann eine Eingangsinformation D (Daten) an verschiedene Ausgänge
verteilt werden. Der adressierte Ausgang nimmt die Information des Einganges an. Bild 6.2.1 zeigt
das Prinzip mit Schaltern und eine mögliche Realisierung mit logischen Grundgattern.
1 - aus - 4
A
DC
A
B
B
D
0
A
1
2
3
B
Y0
Y1
Y2
Y3
1
1
TOR
&
&
&
D
&
Y0= A B D
Y1= A B D
Y2= A B D
Y3= A B D
Bild 6.2.1: Demultiplexer, Wirkungsweise und logische Schaltung
{ Bei D = H sind alle Ausgangsgatter (Torschaltung) freigegeben, der Demultiplexer arbeitet
als 1-aus-m-Decoder. Das n-Bit-Adreßwort AB des Demultiplexers ist der Eingangskode, der
in den 1-aus-m-Kode umgesetzt wird.
{ Für D = L sind alle Ausgangsgatter gesperrt und alle Ausgangssignale Yi zeigen L-Pegel.
Es wird eine Vielzahl von integrierten Demultiplexer-Schaltkreisen angeboten. Sie unterscheiden
sich innerhalb einer Schaltkreisfamilie im wesentlichen durch die Anzahl verfügbarer Ausgänge.
Beispiele integrierter Demultiplexer-Schaltkreise:
{ TTL:
{ CMOS.
{ ECL:
74 LS 154, 74 LS 138, 74 LS139, 74 ALS 538, 74 LS 539;
HEF 4514, HEF 4555, 74 HC 138, 74 HC 139;
10 162, 10172.
6
6. Kodier- und Dekodierschaltungen
6.2.2
Multiplexer
Ein Multiplexer ist dadurch gekennzeichnet, daß er genau einen von n möglichen Dateneingängen
(oder Kanälen bzw. Eingangsworten) auf den Ausgang durchschaltet oder gesperrt ist. Ein
wichtiger Spezialfall des Multiplexers ist der Umschalter, dessen Arbeitsweise unmittelbar aus dem
Kontakt-Ersatzschaltbild (Bild 6.2.2) zu erkennen ist. Eine einfache elektronische Realisierung
gelingt mit Tristate-Negatoren.
D0
E
Y
Y=
{
D1
D 0 für E = 1
D 1 für E = 0
1
E
E
D0
&
D0
Y
1
D1
≥1
&
Y
D1
Bild 6.2.2: Umschalter zwischen zwei Datensignalen
Eine Erweiterung des Umschalters führt unmittelbar zum allgemeinen Multiplexer. Bild 6.2.3 zeigt
das Prinzip am Beispiel eines 4-auf-1-Multiplexers. Ein 1-aus-4-Decoder wählt den entsprechenden
Schalter (Kanal) aus. In CMOS-Technik können diese Schalter mit analogen Transmissionsgliedern
realisiert werden. Dann ist die Übertragung bidirektional möglich und der Multiplexer ist auch als
Demultiplexer zu betreiben (Analog-Multiplexer / Demultiplexer).
1-aus-4
DC
0
A
A
A
B
B
1
2
3
B
D0
D1
D2
D3
1
1
&
&
Y0 = A B D 0
Y1
≥1
&
Y
D
3
D2
D1
&
Y
Y2
Y3 = A B D 3
D0
Bild 6.2.3: Multiplexer, Wirkungsweise und logische Schaltung
Zur Umschaltung zwischen Datenkanälen bzw. zur Erweiterung der Anzahl anschaltbarer Eingänge
können Multiplexer zusammengeschaltet werden (Tristate-Ausgänge, OC-Ausgänge).
6. Kodier- und Dekodierschaltungen
7
Kanal-Umschalter
Sollen z.B. mehrere 4-Bit-Worte nacheinander auf einen 4-Bit-Datenbus geschaltet werden, so kann
ein Multiplexer mit 4 Bit breitem Eingangswort Verwendung finden (Bild 6.2.4). Die Schaltung
wirkt wie ein vierpoliger Umschalter: Bei OE = H, EN = L wird das 4-Bit-Wort A auf Ausgang Y
durchgeschaltet, bei EN = H das Eingangswort B. Für OE = L werden alle Ausgangsleitungen Y in
den hochohmigen Zustand gesteuert.
Kanal A
Y0
Y1
Y2
Y3
Kanal B
1
EN
OE
Bild 6.2.4: Multiplexer für zwei Eingangskanäle (Umschalter)
Eingangserweiterung
Durch Parallelschalten mehrerer Multiplexerausgänge läßt sich die Anzahl der Dateneingangskanäle problemlos erhöhen (Bild 6.2.5). Der Demultiplexer (z.B. 74 139) aktiviert über die Teiladresse A4 A3 genau eine Strobe-Leitung S1, ..., S4 . Dieses Steuersignal wirkt als zusätzliches
Adreßsignal am Multiplexer.
Zum Durchschalten eines Einganges wird die 5-Bit-Adresse A4 A3 A2 A1 A0 verwendet. Für S = H
gehen die Ausgänge Y der Multiplexer (z.B. 74 251) in den Tristate-Zustand.
A0
A1
A2
S1
A3
A4
EN
D0
e0 :
:
e7
A1
A2
EN
74 139
1
2
3
4
S2 S3
A0
A1
A2
S
Y
Y1
:
:
e24
e31
S4
D7
:
:
A
D0
D7
A0
A1
A2
S
74 251
Bild 6.2.5: 32-auf-1-Multiplexer durch Zusammenschalten
Y
Y4
8
6. Kodier- und Dekodierschaltungen
6.2.3
Anwendungen von Multiplexern und Demultiplexern
Sequentielle Datenabfrage, Schrittschaltwerk: Werden die Adreßeingänge eines Multiplexers mit
den Ausgängen eines Dualzählers verbunden, so entsteht ein elektronisches Schrittschaltwerk.
Dabei wird zeitlich nacheinander je ein Eingang zum Ausgang durchgeschaltet.
Parallel-Serien-Wandlung: Das o.g. Schrittschaltwerk läßt sich zur Parallel-Serien-Wandlung von
Daten verwenden. Dazu wird der Adressenzähler mit einer Taktimpulsfolge angesteuert. Ein am
Multiplexer parallel anliegendes n-Bit-Eingangswort erscheint auf der Ausgangsleitung Y seriell
mit der Dauer von n Taktperioden.
Festwertspeicher: Für geringe Speicherkapazitäten sind Multiplexer und Demultiplexer auch als
Festwertspeicher zur Realisierung einfacher logischer (kombinatorischer) Funktionen verwendbar.
Das Programmieren erfolgt durch geeignete Belegung der Eingänge (vgl. Abschnitt 6.2.4).
Zeitmultiplexsystem: Eine wichtige Anwendung von Multiplexern und Demultiplexern ist ihr
Einsatz zur Parallel-Serien- und Serien-Parallel-Wandlung von Daten (Zeitmultiplexsystem).
Bild 6.2.6 zeigt vereinfacht, wie ein 16-Bit-Wort mit Dualzähler und Multiplexer (74 150) in eine
sequentielle Impulsfolge gewandelt wird und am Empfangsort mit einem Demultiplexer (74 154)
die Rücktransformation erfolgt. Multiplexer und Demultiplexer müssen synchronisiert werden.
Dazu muß das Taktsignal mit übertragen werden (zweite Leitung).
Eingang
16-BitDatenwort
:
:
:
D 0 MUX
D1
:
:
Datenleitung
Nullstellung
Tv
R
CT 1
2
4
8
G2
D15
A0
1
2
4
8
C
1
2
3
:
:
:
:
:
G1 DC
74 150
Q
Taktleitung
CT 1
Tv
2
4
R
8
Nullstellung
1
2
4
8
15
Ausgang
16-Bit: Datenwort
:
:
:
:
:
74 154
A3
Pause
C
tH
Q
Bild 6.2.6: Serielle Datenübertragung mit Multiplexer und Demultiplexer /1/
Die Einstellung beider Adressenzähler muß in bestimmten maximalen Zeitabständen synchronisiert
werden (z.B. Nullstellung). Um eine weitere Leitung (Nullstelleingänge) zu vermeiden, kann mit
einer Pausensteuerung des Taktsignales gearbeitet werden (vgl. auch Abschnitt 12). Im Beispiel
wird zwischen zwei aufeinanderfolgenden n-Bit-Impulsgruppen die Taktfolge für mindestens eine
Taktperiode TC unterbrochen und gleichzeitig der senderseitige Adressenzähler zurückgesetzt.
Auf der Empfängerseite erkennt ein retriggerbares Monoflop mit t H l (1, 3 ... 1, 5) T C diese Lücke in
der Taktimpulsfolge und schaltet in den stabilen Zustand zurück. Damit wird der Adressenzähler
auch hier zurückgesetzt.
6. Kodier- und Dekodierschaltungen
6.2.4
9
Multiplexer / Demultiplexer als Funktionsspeicher
Multiplexer und Demultiplexer eignen sich neben ihrer Hauptanwendung als Datenselektoren auch
zur Realisierung allgemeiner, aber einfacher logischer kombinatorischer Funktionen. Oft erhält man
effektivere Lösungen als mit Gatterschaltkreisen. Der Entwurf der Schaltungen ist extrem einfach.
Multiplexer/Demultiplexer können so auch als Festwertspeicher im Sinne von Funktionsspeichern
aufgefaßt werden (vgl. auch Abschnitte 9 und 10).
6.2.4.1 Multiplexer als Funktionsspeicher
Das Prinzip der Realisierung logischer Funktionen mit Multiplexern wird nachfolgend am Beispiel
einer logischen Funktion mit drei Eingangsvariablen gezeigt (Bild 6.2.7).
Lösung 1 (Bild 6.2.7 a):
Die Eingangskombinationen werden als Adressen aufgefaßt und die Multiplexereingänge gemäß
der geforderten Ausgangsbelegung für Y mit H- oder L-Pegel beschaltet.
Lösung 2 (Bild 6.2.7 b):
Die Ausgangsvariable Y eines Multiplexers besteht immer aus der konjunktiven Verknüpfung der
Adresse des geschalteten Kanals mit dem zugehörigen Datenbit Di . Für das betrachtete Beispiel gilt
u.a. Y 0 = A B C D 0 (vgl. auch Bild 6.2.3). Die Eingangsvariablen lassen sich nun so aufspalten, daß
zwei Variable die Multiplexeradresse bilden und die anderen Variablen den Eingängen des
Multiplexers zugeführt werden.
0
1
1
0
1
1
1
0
A
B
C
E0
E1
E2
E3
E4
E5
E6
E7
A
B
C
1-aus-4
MUX
Y
Y
B
0
0
1
1
0
0
1
1
a) zu Lösung 1
A
0
1
0
1
0
1
0
1
0
B
A
C
B
1
2
3
A
A
1
A
8-auf-1-Multiplexer
C
0
0
0
0
1
1
1
1
DC
Y
0
1
1
0
1
1
1
0
Y
C
0
0
1
1
B
0
1
0
1
b) zu Lösung 2
Bild 6.2.7: Realisierung einer logischen Funktion mit Multiplexer
MUX-Eingang
E0
E1
E2
E3
= A
= A
= 1
=A
10
6. Kodier- und Dekodierschaltungen
Verallgemeinert kann gesagt werden:
Einfache Schaltfunktionen lassen sich mit Multiplexern häufig effektiver realisieren als mit anderen
Gatterschaltkreisen der einzelnen Schaltkreisfamilien. Zum Entwurf der Schaltung werden dazu die
als Adreßeingänge verwendeten Eingangsvariablen aus der Funktion abgespaltet (vgl. Beispiel).
{ Jede kombinatorische Funktion mit n Eingangsvariablen und einer Ausgangsvariablen läßt
sich mit Hilfe eines Multiplexers realisieren, der 2n - 1 Dateneingänge und n-1 Adreßeingänge
besitzt. An die Dateneingänge werden abhängig von der Schaltfunktion die Konstanten 0, 1
oder die verbleibende Variable angelegt.
{ Eine Schaltfunktion mit n Eingangs- und einer Ausgangsvariablen kann auch durch einen
Multiplexer mit 2n-2 Eingängen realisiert werden. Dazu werden n-2 Variable abgespalten und
an die Adreßeingänge geschaltet. An die Dateneingänge des Multiplexers werden wieder die
Konstanten 0, 1 und die beiden verbleibenden Variablen bzw. Verknüpfungen davon gelegt.
6.2.4.2 Demultiplexer als Funktionsspeicher
Logische Systeme mit mehreren Ausgängen lassen sich effektiv auch mit Hilfe von Demultiplexern
realisieren, allerdings werden zusätzliche Gatter benötigt (Bild 6.2.8).
{ An einem Ausgang eines Demultiplexers tritt genau dann H-Pegel auf, wenn am Eingang die
zugehörige Adresse als Elementarkonjunktion aller Adreßsignale anliegt. Ein Demultiplexer
wirkt somit praktisch als Generator für Elementarkonjunktionen bzw. Minterme.
{ Die Ausgangsfunktionen ergeben sich aus der ODER-Verknüpfung der Ausgangvariablen,
die den in der Schaltfunktion enthaltenen Elementarkonjunktionen zugeordnet sind.
Auch die meisten Kodierschaltungen (vgl. Abschnitt 6.1) können nach diesem Prinzip realisiert
werden. Ausgangsbasis dafür ist ein dual-adressierter Demultiplexer bzw. ein 1-aus-m-Kodierer.
Bild 6.2.8 b) zeigt beispielhaft eine Schaltung mit einem Demultiplexer, welche die Anzahl der im
Eingangswort E = e2 e1 e0 enthaltenen H-Belegungen als Dualzahl angibt.
H (1)
E
A
B
C
D
a)
DC 0
1
2
:
:
:
13
14
15
≥1
≥1
Y0
Y1
:
:
:
1
e0
e1
e2
E DC
A
B
C
≥1
0
1
2
3
4
5
6
7
≥1
a0
a1
b)
Bild 6.2.8: Realisierung logischer Funktionen mit Demultiplexer (Prinzip)
Bei der praktischen Realisierung komplexerer Schaltfunktionen nach diesem Konzept ist meist die
begrenzte Anzahl von Eingängen verfügbarer Gatterschaltkreise ein Problem.
Bessere Möglichkeiten bieten hier programmierbare logische Schaltungen, kurz PLDs (vgl. dazu
auch Abschnitt 10).
7. Zähler und Frequenzteiler
7.
1
Zähler und Frequenzteiler
Zähler und Frequenzteiler werden aus Flipflop-Stufen aufgebaut (Binärteiler). Zur Auswertung
bzw. Anzeige des gespeicherten Zählergebnisses werden die Ausgänge der Flipflop-Stufen genutzt.
Ein Zähler addiert die Eingangsimpulse, speichert sie und gibt das gespeicherte Ergebnis kodiert
aus. Dazu müssen die Anschlüsse der Flipflop-Stufen nach außen geführt werden, die für die
Ergebnisdarstellung benötigt werden (kodeabhängig). Ein Frequenzteiler gibt nach n eintreffenden
Eingangsimpulsen einen Ausgangsimpuls ab und kehrt in seine Ausgangslage zurück.
Zur Realisierung sind nur sogenannte Zähl-Flipflops (FF mit Zwischenspeicher) geeignet.
Von der Schaltungsstruktur gibt es bis auf die Anzahl notwendiger Anschlüsse nach außen keinen
grundlegenden Unterschied zwischen Zählern und Teilern. Jeder Zähler kann als Teiler betrieben
werden. Eine Klassifizierung von Zählern kann nach verschiedenen Merkmalen erfolgen:
{ Zugrundeliegendes Zahlensystem (Kode), z.B. duale und dekadische Zähler;
{ Zuführung der Zählimpulse bezüglich eines Taktes, z.B. synchron oder asynchron;
{ Zählrichtung, z.B. Vorwärts- und/oder Rückwärtszähler.
7.1
Dualzähler
Die Zuordnung zwischen der Anzahl Z von Eingangsimpulsen und den Werten der einzelnen
Ausgangsgrößen Zi liefert die Zustandstabelle bzw. das Zeitdiagramm eines Zählers (Bild 7.1).
1) Eine Ausgangsvariable Zi ändert beim Vorwärts-/Rückwärtszählen ihren Wert genau dann, wenn
die nächstniedrigere Variable Zi-1 von 1 auf 0 (0 auf 1) wechselt.
2) Eine Ausgangsvariable Zi ändert beim Vorwärts-/Rückwärtszählen ihren Wert genau dann, wenn
alle niedrigeren Variablen den Wert 1 (Wert 0) haben und der nächste Zählimpuls eintrifft.
Die Umsetzung von (1) führt zu asynchronen, die Umsetzung von (2) zu synchronen Dualzählern.
Zur Umschaltung der Zählrichtung wird neben den Zähl-Flipflops zusätzliche Logik benötigt.
Z
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0
Z0
8
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
Z1
4
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
Z2
2
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
Z3
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
Takt
1 2 3 4 5 6 7 8 9 10 12 14 16
Z
Z0
Z1
Z2
Z3
Bild 7.1: Zustandstabelle und Zeitverläufe eines 4-Bit-Dualzählers (vorwärts)
2
7. Zähler und Frequenzteiler
7.1.1
Asynchrone Dualzähler
Ein asynchroner Dualzähler besteht aus einer Kette von Zähl-Flipflops, wobei der Takteingang
jedes einzelnen Flipflops an den Ausgang der Vorstufe angeschlossen ist. An den Takteingang des
ersten Flipflops wird der Zählimpuls gelegt (Bild 7.2). Für einen Vorwärtszähler müssen die
Flipflops ihren Ausgangszustand mit der 1/0-Flanke des Taktsignales ändern. Es werden also
flankengetriggerte oder Master-Slave-Flipflops benötigt; sie sind als Binäruntersetzer geschaltet.
Q0
C
1
Q1
Q2
Q3
& 1J
& 1J
& 1J
& 1J
C1
C1
C1
C1
& 1K
& 1K
& 1K
& 1K
FF 0
1
FF 1
1
FF 2
1
RCO
FF 3
Bild 7.2: Asynchroner 4-Bit-Dual-Zähler mit JK-Master-Slave-Flipflops
(aktive Flanke ist 1/0-Übergang an C)
Sollen mit positiven Taktflanken getriggerte Flipflops verwendet werden, z.B. TTL-D-Flipflops, so
muß man ihren Takt invertieren (an Q des Vorgänger-FFs anschließen), damit ein Vorwärtszähler
entsteht. Die direkte Nachbildung der Schaltung aus Bild 7.2 führt sonst auf einen Rückwärtszähler.
Q0
C
C1
1D
Q1
C1
1D
Q2
C1
1D
Q3
C1
1D
Bild 7.3: Asynchroner 4-Bit-Dualzähler mit D-Flipflops (Triggerung mit 0/1-Flanke an C)
Bei asynchronen Zählern wird nur das erste Flipflop der Kettenschaltung vom Zähltakt C selbst
angesteuert, alle anderen Flipflops werden indirekt angesteuert. Damit erhält das letzte Flipflop
seinen Eingangstakt erst, wenn alle anderen Flipflops umgeschaltet haben (vgl. Bild 7.5). Die
Ausgangszustände der einzelnen Flipflops ändern sich jeweils um die Schaltzeit eines Flipflops
verzögert. Bei großer Zählkapazität und hohen Zählfrequenzen kann das ggf. zu Problemen führen.
Für asynchrone Zähler wird deshalb gefordert:
1) Nach dem letzten Zählimpuls muß die Verzögerungszeit der Kettenschaltung vergehen,
bevor das Zählergebnis ausgewertet wird.
2) Ist eine Zählerauswertung bei laufendem Zählvorgang notwendig, so darf die Periodendauer der Zählfrequenz nicht kleiner sein als die Verzögerungszeit der Zählkette.
{ Die beiden Bedingungen führen auf harte Beschränkungen der maximalen Zählerfrequenz (2)
bzw. der Zykluszeit (1).
7. Zähler und Frequenzteiler
1D
C
Q
1D
Q
C
C1
Q
Q
1J
C
Q
1K
1J
Q
C
Q
C
Q
Q
Q
JK-Flipflop
Q
1K Q
Q
Q
Q
getaktetes RS-Flipflop
C
Q
JK-Master-Slave-Flipflop
Q
Q
1R Q
Q
1S
Q
C1
1
Q
C1
1R
DV-Flipflop
C1
1
1V
1S
Q
C1
V
D-Flipflop
Q
3
C1
RS-Master-Slave-Flipflop
Bild 7.4: Schaltungen verschiedener Flipflop-Typen als Binäruntersetzer
Beispiele bekannter Zähler-Schaltkreise:
Zählumfang
4 bit
7 bit
8 bit
24 bit
30 bit
7.1.2
TTL
74 LS 93
CMOS
ECL
10 178
40 24
74 LS 393
45 21
74 LS 292
Synchrone Dualzähler
Bei synchronen Zählern sind alle Takteingänge der Flipflops parallel geschaltet, damit erfolgen alle
Zustandsänderungen taktsynchron. Damit nicht bei jedem Taktimpuls alle Flipflops schalten,
werden die taktabhängigen Informationseingänge von den Ausgängen aller Vorgänger-Flipflops
gesteuert. Dazu benötigt man i.a. zusätzliche Gatter (Bild 7.5). Beim Einsatz von JK-Flipflops
können die internen UND-Gatter genutzt werden (Bild 7.6). Da verfügbare Schaltkreise aber nur je
drei J/K-Eingänge besitzen, lassen sich ohne zusätzliche externe Gatter nur 4-stufige Dualzähler
realisieren.
{ Die wesentlichen Unterschiede zwischen synchronen und asynchronen Zählern betreffen
Ansteuerung und Zählgeschwindigkeit.
Bei synchronen Zählern werden alle Flipflops synchron vom Taktsignal C angesteuert. Die
Verzögerung zwischen Eingangssignal des Zählers und dem neuen Ausgangszustand entspricht der
Verzögerungszeit td einer einzelnen Flipflop-Stufe. Nachteilig ist der hohe Verknüpfungsaufwand
für die Vorbereitungseingänge, damit nicht alle Flipflops bei jedem Taktimpuls schalten.
4
7. Zähler und Frequenzteiler
Asynchrone Zähler benötigen weniger Verknüpfungsaufwand (Gatter, Leitungen). Die FF-Stufen
werden vom Ausgang der Vorgänger-Stufe gesteuert (außer der ersten Stufe).
Wegen der Signallaufzeiten kippen die einzelnen Stufen zeitlich nacheinander, also asynchron.
Dadurch dauert der Übergang zwischen den Zählerzuständen länger als bei Synchronzählern und an
den Zähler-Ausgängen können zwischenzeitlich undefinierte Belegungen auftreten (Bild 7.5).
Deshalb lassen sich mit asynchronen Zählern sogenannte einschrittige Kodes nicht realisieren
(diese werden z.B. bei Analog-Digital-Umsetzung angewendet).
Q0
1
C
Q1
1T
1T
C1
C1
Q2
&
Q3
&
1T
C1
1T
C1
RCO
synchron
1
C
1T
Q0
1
C
1T
Q1
1
C
Q2
1T
Q3
1
C
1T
C
asynchron
C
C
Q0
Q0
Q1
Q1
Q2
Q2
Q3
Q3
td
4 td
Bild 7.5: Synchroner und asynchroner Dualzähler
Q0
1
C
Q1
Q2
Q3
& 1J
& 1J
& 1J
& 1J
C1
C1
C1
C1
& 1K
& 1K
& 1K
& 1K
FF 0
FF 1
FF 2
FF 3
Bild 7.6: Synchroner Dualzähler mit JK-Flipflops
RCO
7. Zähler und Frequenzteiler
7.2
5
Dezimalzähler
Zur Realisierung eines Dezimalzählers wird für jede Dezimalziffer ein vierstelliger Dualzähler
benötigt. Durch zusätzliche Schaltungsmaßnahmen wird erreicht, daß diese Dualzähler bereits beim
zehnten Zählimpuls wieder den Anfangszustand Null einnehmen (BCD-Kode, 8-4-2-1-Kode). Die
Zustandstabelle und das Zeitdiagramm eines BCD-Zählers sind in Bild 7.7 angegeben. Sie stimmen
bis zur Zahl 9 mit den Angaben zum Dualzähler überein.
{ Mit BCD-Zählern ist eine Dezimalanzeige des Zählerstandes sehr viel einfacher als beim
Dualzähler, weil sich jede Dekade einzeln dekodieren und als Ziffer anzeigen läßt.
Z
Z3
8
0
0
0
0
0
0
0
0
1
1
0
0
1
2
3
4
5
6
7
8
9
10
Z2
4
0
0
0
0
1
1
1
1
0
0
0
Z1
2
0
0
1
1
0
0
1
1
0
0
0
Z0
1
0
1
0
1
0
1
0
1
0
1
0
Takt 1 2 3 4 5 6 7 8 9 10
Z
Z
0
Z1
Z2
Z3
Bild 7.7: Zustandstabelle und Zeitdiagramm eines BCD-Zählers (Zähldekade)
7.2.1
Asynchrone BCD-Zähler
Die Schaltung eines asynchronen BCD-Zählers ist in Bild 7.8 gezeigt. Damit das Zurückschalten in
den Ausgangszustand mit dem 10. Zählimpuls erzwungen wird, ist i.a. zusätzliche Logik nötig.
{ Beim Einsatz von JK-Flipflops kann man wieder externe Gatter sparen.
Q0
C
1
Q1
Q2
Q3
& 1J
& 1J
& 1J
& 1J
C1
C1
C1
C1
& 1K
& 1K
& 1K
& 1K
FF 0
1
FF 1
1
FF 2
1
FF 3
Bild 7.8: Asynchroner BCD-Zähler mit JK-Flipflops (Zähldekade)
RCO
6
7. Zähler und Frequenzteiler
Gegenüber dem Dualzähler ergeben sich drei wesentliche Änderungen:
{ Flipflop FF1 darf beim 10. Zählimpuls nicht auf 1 schalten, obwohl an Ausgang Q0 ein
aktiver 1/0-Wechsel auftritt. Ausgang Q1 muß auf Null gehalten werden, wenn Q3 vor dem
Takt den Wert 1 hat (Verbindung J1 - Q 3 ). Wegen J 1 = Q 0 Q 3 ist gesichert, daß Ausgang Q2
beim 10. Zählimpuls auf Null bleibt.
{ Flipflop FF3 muß beim 10. Zählimpuls auf Null zurückschalten. Da die Flipflops FF1, FF2
nun blockiert sind, wird der Takt für Flipflop FF3 von Ausgang Q0 abgeleitet und so die
Blockade umgangen.
{ Die Verknüpfung J 3 = Q 2 Q 1 verhindert, daß Flipflop FF3 zu früh gekippt werden kann, z.B.
zu den Taktzeiten 2, 4, 6. Damit wird erstmals mit dem achten Zählimpuls Q3 = 1 geschaltet.
Gleichzeitig wird Q1 = Q2 = 0 gesetzt. Beim nächsten 1/0-Übergang an Q0 wird Q3 wieder
zurückgesetzt. Das ist genau beim 10. Zählimpuls der Fall.
7.2.2
Synchrone BCD-Zähler
Ein synchroner BCD-Zähler läßt sich nach den gleichen Überlegungen wie oben aus einem
synchronen Dualzähler ableiten. Bild 7.9 zeigt eine entsprechende Schaltung.
{ Das Zurückschalten von Ausgang Q3 mit dem 10. Zählimpuls wird erzwungen, indem die
Dekodierung der Ausgänge der Vorgänger-Flipflops zur Belegung J3 = 0, K3 = 1 führt. Das ist
genau die Bedingung für den Null-Übergang am JK-Flipflop.
Q0
1
C
Q1
Q2
Q3
& 1J
& 1J
& 1J
& 1J
C1
C1
C1
C1
& 1K
& 1K
& 1K
& 1K
FF 0
FF 1
FF 2
FF 3
RCO
_
Q3
Bild 7.9: Synchroner BCD-Zähler (Zähldekade)
Beispiele bekannter Zähler- Schaltkreise:
{ TTL:
{ CMOS:
{ ECL:
74 LS 160, 74 LS 190, 74 LS 192 (mit V- und R-Zähleingang),
4160, 4510
10 137.
8. Interface-Schaltungen
1
,QWHUIDFH6FKDOWXQJHQ
$OOJHPHLQH%HWUDFKWXQJHQ
Bei der Realisierung digitaler Schaltungen/Systeme sind verschiedene logische Funktionseinheiten
ein- und ausgangsseitig miteinander zu verbinden, die sich in ihren elektrischen Kennwerten ggf.
stark unterscheiden. Neben der logischen Signalverarbeitung müssen an dieser 6FKQLWWVWHOOH immer
auch die Probleme der Pegelanpassung, der Signalwandlung und -regenerierung, der optischen
Anzeige u.a. gelöst werden. Dazu werden im allgemeinen sogenannte ,QWHUIDFHVFKDOWXQJHQ benötigt
(Bild 8.1.1).
UCC
R
I a1
IF
I e1
Sender 1
:
:
:
GND S1
Empfänger 1
U e1
Ua1
GND E1
Interface
I em
I an
Empfänger m
Sender n
IL
GND Sn
Uan
:
:
:
RL
U em
GND Em
GND
Bild 8.1.1: Schnittstelle zwischen Teilnehmern eines Bussystems (Interface)
Die Schnittstelle (Interface) bestimmt, welche physikalischen (hier elektrischen) Eigenschaften die
Verbindungsleitungen haben müssen, wie sie bezeichnet werden und welche Kennwerte (Pegel,
Ströme, Schaltzeiten, Schaltflanken,...) einzuhalten sind.
^ Eine Interfaceschaltung kann schaltungstechnisch zwischen einer einfachen Drahtverbindung
und einer komplexen elektronischen Schaltung variieren.
Bei der Realisierung einer Schnittstelle muß durch $XVZDKOXQG%HPHVVXQJ der Interfaceschaltung
die Aufgabe gelöst werden, die Ausgangskennwerte der Sender (Spannungspegel, Stromwerte)
untereinander und gleichzeitig an die Eingangskenngrößen der Empfänger DQ]XSDVVHQ Dabei
können neben den spezifischen Schaltkreiskennwerten sowohl die Speisespannungen als auch die
Bezugsspannungen (Gleichtakt) der Teilnehmer unterschiedlich sein.
^ Dazu muß für jede elektrische Schnittstelle auf Grundlage des Kirchhhoff'schen Knotensatzes
eine Strombilanz unter Beachtung der erforderlichen Betriebsparameter DOOHU Teilnehmer bei
Einhaltung der Logikpegel, der Bausteinkennwerte und der zulässigen Grenzwerte erstellt
werden.
^ Meist wird eine ZRUVWFDVH%HPHVVXQJ der Schaltung vorgenommen (vgl. Abschnitt 8.6).
2
8. Interface-Schaltungen
Im einzelnen sind z.B. folgende Aufgaben zu lösen:
.RSSOXQJXQWHUVFKLHGOLFKHU6FKDOWNUHLVIDPLOLHQ
Die Ströme und Spannungen innerhalb HLQHU Schaltkreisfamilie sind durch den Hersteller bereits
ein- und ausgangsseitig aufeinander abgestimmt.
Beim Übergang zu Gattern einer anderen Schaltkreisfamilie sind meist Pegelanpaßschaltungen
erforderlich, da die Kennwerte verschiedener Schaltkreise i.a. nur bedingt kompatibel sind.
^ So sind z.B. die Ausgänge von CMOS-Gattern (74 HC, HEF 4000 B) spannungsmäßig TTLkompatibel (bei 5 V-Betriebsspannung), nicht jedoch die Eingänge.
^ Nicht kompatibel sind i.a. die zulässigen Stromwerte von TTL und CMOS.
$QVFKOXV\VWHPIUHPGHU)XQNWLRQVHOHPHQWH
Die Nichtkompatibilität gilt erst recht, wenn logische Bausteine gleichzeitig mit Widerständen,
LED, Optokopplern, ... zu verschalten sind. Man spricht dann auch von V\VWHPIUHPGHQ Elementen
bezüglich der logischen Schaltkreise.
^ Besonders hohe Anforderungen werden beim Übergang zwischen analogen und digitalen
Signalen gestellt (AD- und DA-Wandlung).
$QSDVVXQJDQJU|HUH/DVWHQXQGK|KHUH3HJHO
Ein Übergang zu höheren Signalpegeln ist besonders in der Prozeßperipherie notwendig und auch
sinnvoll. Dabei können sowohl der Störabstand als auch die Ansprechschwelle bzw. die Umschaltspannung verändert werden. Es entstehen so die Aufgaben der Pegelanpassung, Pegelverschiebung
und Veränderung des Signalhubes (Differenz zwischen H- und L-Pegel).
%HHLQIOXVVXQJGHU)ODQNHQ]HLWHQ
Schaltflanken werden infolge kapazitiver Lasten und Leitungsübertragung ggf. stark beeinflußt.
Werden Mindeststeilheiten gefordert (Flipflop-Takteingänge), so ist eine Signalregenerierung z.B.
mit Schmitt-Triggern nötig (vgl. Abschnitt 5).
^ Manchmal muß die Schaltflanke eines Senders auch verlängert werden, um hEHUVSUHFKHQ auf
andere Signalleitungen und/oder /HLWXQJVUHIOH[LRQHQ zu unterdrücken bzw. zumindest in ihrer
Wirkung zu reduzieren (vgl. Abschnitt 11).
(QWNRSSOXQJYRQ6HQGHUXQG(PSIlQJHUJDOYDQLVFKH7UHQQXQJ
Zur rückwirkungsfreien Signalübertragung zwischen Sender und Empfänger sind ggf. 9HUVWlUNHU
einzusetzen.
^ Bei schwierigen Fällen kann auch eine JDOYDQLVFKH 7UHQQXQJ mittels ,VRODWLRQVYHUVWlUNHU
(Optokoppler, Relais, Übertrager) notwendig werden.
2SWLVFKH$Q]HLJH
Zur digitalen bzw. quasianalogen Anzeige digitaler Informationen und/oder zur Signalisierung
bestimmter Zustände des logischen Systems werden optische Anzeigeeinheiten benötigt.
8. Interface-Schaltungen
3
3HJHOZDQGOHU
3HJHOXPVHW]XQJ]ZLVFKHQ/RJLNSHJHOQ
Relativ einfache schaltungstechnische Lösungen ergeben sich aus der Strombilanz für die Aufgabe
der 3HJHODQSDVVXQJ zwischen unterschiedlichen Schaltkreisfamilien. Nachfolgend sind Beispiele
von Pegelwandlerschaltungen zusammengestellt /1, 7/.
3HJHODQSDVVXQJ&02677/
Praktisch erfolgt der Übergang von CMOS- auf TTL-Schaltkreise meist wegen der höheren
7UHLEHUVWU|PH bipolarer Schaltkreise, seltener wegen der größeren Schaltgeschwindigkeit.
Beim Zusammenschalten von CMOS-Schaltungen mit unterschiedlicher Speisespannungen oder
von CMOS- mit TTL-Schaltkreisen müssen die zulässigen Spannungspegel XQG gleichzeitig die
entsprechenden Ströme eingehalten werden (Grenzwerte beachten).
15 V
5V
5V
(5 ... 15) V
R3
5k
R1
&
&
≥1
&
Y
7,5 k
R2
820
GND
a) CMOS
TTL, CMOS
GND
b)
CMOS
LS -, ALS -TTL
15 V
5V
5V
R
R
&
&
&
&
Y
Y
7406
GND
c) TTL (OC)
CMOS
GND
d)
TTL
CMOS
Bild 8.2.1: Pegelwandlerschaltungen zur Kopplung CMOS - TTL
In der Schaltung nach Bild 8.2.1 a) erfolgt die Pegelanpassung über einen Transistorschalter. Die
Negation dieser Transistorstufe ist beim logischen Entwurf zu berücksichtigen. Die angegebenen
Widerstandswerte sind als Orientierungswerte zu verstehen. Eine Schaltung mit komplementärem
Transistor ist ebenfalls möglich (vgl. Abschnitt 8.6).
Der Übergang von CMOS (UDD > 5 V) auf Schottky-TTL-Eingänge kann, abhängig vom Typ des
Schottky-Einganges, ggf. direkt erfolgen (Bild 8.2.1 b), wenn es die Strombilanz gestattet.
Die Pegelwandlung TTL - CMOS ist i.a. mit Open-Collector-Gattern aus den TTL-Reihen möglich
(Bild 8.2.1 c). Dabei ist die Spannungsfestigkeit des TTL-Ausgangstransistors zu beachten. Die
Bemessung des notwendigenSXOOXS-Widerstandes R ist in Abschnitt 8.6 beschrieben.
Bei 5 V-Versorgung des CMOS-Gatters kann auch ein Gegentakt-TTL-Ausgang mit zusätzlichem
pull-up-Widerstand R = (2 ... 10) kΩ eingesetzt werden (Bild 8.2.1 d); der dadurch erhöhte
L-Ausgangsstrom des TTL-Gatters ist zu beachten.
4
8. Interface-Schaltungen
Für die Anpassung zwischen Bausteinen verschiedener Schaltkreisfamilien stehen auch spezielle
Schaltkreise zur Verfügung. Bild 8.2.2 zeigt ein CMOS-TTL-CMOS-Interface.
15 V
15 V
5V
5V
UCC1
&
R
R
1
&
1
R*
&
Y
4049 B
(4050 B)
74 xxx
&
Y
4104 B
GND
GND
CMOS
TTL
TTL
CMOS
TTL/OC
Bild 8.2.2: CMOS-TTL-CMOS-Interface mit speziellen CMOS- Bausteinen
Anstelle des CMOS-Bausteins 4104 B kann z.B. auch ein TTL-Gatter mit OC-Ausgang eingesetzt
werden, dessen Ausgangstransistor eine Spannungsfestigkeit UCER > 15 V besitzt (vgl. Bild 8.2.1).
Für die Pegelanpassung CMOS (UDD > 5 V) - TTL werden sowohl invertierende (4049 B) als auch
nichtinvertierende Bausteine (4050 B) angeboten.
3HJHOZDQGOXQJ/6/&02677/
Die Anpassung von CMOS- bzw. TTL-Schaltungen an die höheren LSL-Pegel kann mit InterfaceSchaltungen nach Bild 8.2.3 realisiert werden.
(10 ... 30) V
(10 ... 30) V
(3 ... 15) V
&
R2
R1
R2
a)
LSL
5V
D1
1
&
1
R1
Y
T
Y
C
D2
GND
CMOS (TTL)
b)
GND
CMOS (TTL)
LSL
Bild 8.2.3: LSL-CMOS-(TTL-)-Interfaceschaltungen
Der Ohmsche Spannungsteiler in Bild 8.2.3 a) kann durch eine Signalteilerschaltung mit Z-Diode
(Z-Diode anstelle R2 ) ersetzt werden. Die Diode D2 muß dann entfernt werden.
^ Der Übergang TTL (CMOS) - LSL erfolgt typisch über Transistorschalter oder OC-Gatter
(Spannungsfestigkeit des Ausgangstransistors beachten).
8. Interface-Schaltungen
5
8PVHW]XQJ]ZLVFKHQ/RJLNSHJHOXQG93HJHO
Logische Schaltkreise können typisch keine ELSRODUHQ3HJHO erzeugen bzw. verarbeiten. Mit relativ
einfachen Schaltungen ist aber auch diese Umsetzung möglich, z.B. von TTL-Pegel auf den i.a.
bipolaren V.24-Pegel bzw. umgekehrt (Bild 8.2.4).
+ 12 V
5V
5V
&
Ua
R1
(18 k)
1,4 V
TTL ,
CMOS
R2
-
Uo
+
(4,7 k) 1
R1
V.24
V.24
R2
T
(10 k)
D
TTL, CMOS
(2,4 k) - 12 V
Bild 8.2.4: Umsetzung zwischen TTL-Pegel und V.24-Pegel
Eine Umsetzung des 5 V-Logikpegels in V.24-Pegel gelingt z.B. mit einem 2SHUDWLRQVYHUVWlUNHU
bzw $QDORJNRPSDUDWRU. Diese eigentlich analog arbeitenden Schaltkreise erkennen sehr kleine
Differenzspannungen (µV ... mV) zwischen ihren Eingangsklemmen. Abhängig vom Vorzeichen
dieser Differenz schaltet der Ausgang bei Komparatorbetrieb auf seine positive bzw. negative
Sättigungsspannung (Wert abhängig von Größe der Betriebsspannung).
Im Beispiel wird der QLFKWLQYHUWLHUHQGH Eingang des Komparators über einen Spannungsteiler fest
an etwa 1,4 V gelegt (TTL-Schaltschwelle). Der Ausgang des Logikgatters steuert unmittelbar den
invertierenden Eingang des Komparators an.
^ Bei beiden Logikpegeln geht der Ausgang in Sättigung (z.B. Uo = U+omax für Ua = UaL).
^ Bei bipolarer Versorgungsspannung des Komparators gelingt so gleichzeitig die Umsetzung
in den negativen Signalhub bei V.24-Schnittstellen (vgl. auch Abschnitt 12).
Für die umgekehrte Umsetzung des V.24-Pegels in den 5 V-Logikpegel reicht meist eine einfache
Transistorschaltstufe (die Diode D schützt den Transistor T vor negativen Spannungen).
Für beide Richtungen der Pegelumsetzung zwischen V.24-Pegel und 5 V-Logikpegel gibt es auch
integrierte Schaltkreise, z.B. in der Bausteinreihe 75 xxx:
^ 4-fach Leitungstreiber 75 188 (TTL - V.24),
^ 4-fach Empfänger
75 189A (V.24 - TTL).
Es werden auch zahlreiche spezielle RS 232-Schnittstellen-Bausteine als integrierte Schaltkreise
angeboten (vgl. Abschnitt 12). Sie benötigen nur eine Betriebsspannung und je nach Typ keine oder
nur wenige externe Elemente (Kondensatoren). Modifikationen betreffen insbesondere den Schutz
gegen elektrostatische Entladungen (ESD), die einfache Realisierung einer galvanischen Trennung
sowie Eigenschaften und Kennwerte bei Batteriebetrieb (3 V-Versorgungsspannung, minimale
Stromaufnahme - Shutdown-Betrieb).
6
8. Interface-Schaltungen
'LRGHQ%HJUHQ]HUVFKDOWXQJHQIU/6,6FKDOWNUHLVH
Bei höher integrierten Schaltkreisen (LSI - large scale integration), wie z.B. Einchipmikrorechner,
E/A-Peripherieschaltkreise u.a., wird typisch eine relativ enge Begrenzung der Eingangspegel UI
auf - 0,3 V ≤ UI ≤ UCC + 0,3 V gefordert. Das leisten die einfachen Dioden-Begrenzerschaltungen
nach Bild 8.2.5 a) nicht. Eine modifizierte Form dieser Grundschaltung zeigt Bild 8.2.5 b).
Mit einer Hilfsschaltung aus Widerstand R2 und Dioden D3 , D4 werden hier neue Bezugsgrößen
U CC und GND* für die Begrenzerschaltung mit R1 , D1 und D2 realisiert. Die Schaltung eignet sich
auch für n-Bit-Parallelbussysteme, wobei für die Dioden D1 und D2 vorteilhaft Mehrfach-Dioden
verwendet werden.
^ Voraussetzung für die ordnungsgemäße Funktion der Schaltung ist, daß die Dioden D3 , D4 in
allen Betriebszuständen leitend sind, d.h. es muß immer ein Mindeststrom durch diese
Dioden fließen. Aus dieser Forderung ergibt sich die Bemesssung der Widerstände R1 , R2 .
UCC
+12 V
-
UE R1
+
D2
U CC
D4
+12 V
D 1 MSI
-
UI
+
D1
UE R1
D2
-12 V
GND
Komparator
-12 V
LSI
R2
GND*
US
D3
Komparator
-U S < U I < U CC+ US
a) einfacher Dioden-Begrenzer
U*CC
UI
0 < UI < U CC
b) modifizierter Dioden-Begrenzer für LSI
Bild 8.2.5: Dioden-Begrenzerschaltungen für MSI und LSI-Schaltkreise
%HPHVVXQJVJOHLFKXQJHQ
Bild 8.2.6 zeigt die wirksamen Teilschaltungen für UE > UCC bzw. UE < 0, die Gleichungen für die
beiden Fälle sind nachfolgend zusammengestellt. Die Gleichung (5) repräsentiert die Forderung:
^ Die Dioden D3 und D4 sind stets leitend, d.h es fließt ein Mindeststrom ID4 für UE > UCC
(bzw. ID3 für UE < 0), auch bei maximalem Strom ID1 bzw. ID2 durch die Dioden D1 bzw. D2 .
I D4
I D1
UE
I 1 R1
D1
I D3
a) UE > U CC
U
CC
D4
U*
I I CC
UI
D4
UE
I 1 R1
R2
D3
U
CC
I D4
UI
I D2
b) UE < 0
II
D2
R2
GND*
I D3
D3
Bild 8.2.6: Ersatzschaltungen zur Bemessung der Begrenzerschaltung in Bild 8.2.5 b)
8. Interface-Schaltungen
a) Bemessung für UE > UCC
b) Bemessung für UE < 0
I 1 = I D1 + I I
I 1 = I D2 − I I
I D3 = I D1 + I D4
U − U D4 − U D3
I D3 = CC
R2
I D4 = I D3 + I D2
U − U D4 − U D3
I D4 = CC
R2
I1 =
U E − U D1 − (U CC − U D4 )
R1
I1 =
I D4 = I D3 − I D1
Forderung:
7
(1)
(2)
(3)
U E + U D3 − U D2
R1
(4)
I D3 = I D4 − I D2
(5)
Mit (1), (3) und (4) folgt
für Fall a)
R2 = R1
für Fall b)
R2 = R1
U CC − U D4 −U D3
U E − U D1 + U D4 − U CC + (I D4 − I I ) . R 1
(6 a)
U CC − U D4 − U D3
,
.
U E − U D1 + U D4 − U CC + (I D4 − I I ) . R 1
(6 b)
Außerdem gilt
R1 =
U E − U D1 + U D4 − U CC
R1 =
R2 =
I1
U E − U D2 + U D3
,
(7 a, b)
I1
U CC − U D4 − U D3
R2 =
I D3
U CC − U D4 − U D3
.
(8 a, b)
I D4
Eine grafische Darstellung der Verhältnisse zeigt Bild 8.2.7, der zulässige Wertebereich für die
Widerstände ist als Toleranzfeld gekennzeichnet.
R2
R = f (R ) nach Gl.6b)
2
1
R1max (Gl. 7a)
kΩ
R2max
10
R1max (Gl. 7 b)
Toleranzfeld
Nennwert
5
R 2min (Gl.8)
R1
Nennwert 60
130
Bild 8.2.7: Grafische Darstellung zur Bemessung der Widerstände in Bild 8.2.5 b)
kΩ
8
8. Interface-Schaltungen
$Q]HLJHHOHPHQWHXQGLKUH$QVWHXHUVFKDOWXQJHQ
Zur digitalen und quasianalogen Anzeige digitaler Informationen, z.B. Zähler- und Registerinhalte,
haben /XPLQHV]HQ]GLRGHQ (LED) als sogenannte aktive Strahler und )OVVLJNULVWDOOHOHPHQWH (LCD)
als passive Strahler die größte Bedeutung. Beide werden in Form von 7-Segment-Anzeigen und als
5x7-Punktmatrix-Anzeigen angeboten. Auch großflächige LCD-Matrixdisplays (600x400 Pixel und
mehr) werden realisiert.
^ Für kleine Betriebsspannungen UB = (2 ... 7) V und bei geringem Leistungsbedarf (< 15 µW)
sind LCD-Anzeigeelemente gegenüber LED-Anzeigen überlegen.
^ Bei Einsatz in netzbetriebenen Geräten und geringem Anzeigeumfang haben LED-Anzeigen
gegenwärtig den Vorzug (Preis, zulässiger Temperaturbereich, aktive Strahler).
/('$Q]HLJHHLQKHLWHQ
Bei diesen Anzeigeeinheiten werden die Ziffern 0 bis 9, Buchstaben und Symbole in Form von
sieben einzelnen Leuchtbalken (Segmente) zusammengesetzt (Bild 8.3.1).
^ Schaltungstechnisch gesehen stellt jedes dieser Segmente eine einzelne LED dar.
LED sind in 'XUFKODULFKWXQJbetriebene Halbleiter-Dioden, die eine inkohärente Strahlung in den
Farben rot (UF = 1,6 V), gelb, grün (UF = 2,6 V) oder im infraroten Bereich aussenden. Der
Leistungsverbrauch dieser LED-Anzeigeeinheiten beträgt einige mW/Segment, die Ziffernhöhe
liegt bei (5 ... 20 ) mm. Für den Einsatz ist die relativ niedrige Betriebsspannung UB > 3,4 V
wichtig. Sie gestattet den Betrieb von LED-Anzeigen in 5 V-Systemen.
a
f
5V
b
g
e
h
&
c
d
R
R
(220 Ω )
I F > 10 mA
UF = (1,6...2,6) V
Ziffern
Sonderzeichen
Buchstaben
Bild 8.3.1: 7-Segment-Anzeige mit LED; Darstellung der Ziffern, Symbole und Buchstaben
8. Interface-Schaltungen
9
$QVWHXHUVFKDOWXQJHQIU/('$Q]HLJHQ
Anzeigeelemente müssen meist mit Dekodier- und Treiberschaltungen angesteuert werden (Kode
der Information, Kode der Anzeigeeinheit, Strom- und Spannungsbedingungen). Dafür gibt es eine
Vielzahl von integrierten Bausteinen. Die wesentlichen Gesichtspunkte zur Realisierung von
Ansteuerschaltungen für LED-Anzeigen sind aus Bild 8.3.2 zu entnehmen.
Soll z.B. das Ergebnis eines =lKOYRUJDQJHV angezeigt werden, so empfiehlt sich die Anwendung
eines Zwischenspeichers (Parallelregister) vor dem Dekodierer (Bild 8.3.2, oben). Das Zählergebnis
wird zu bestimmten Zeitpunkten (Takt der Übernahme) in diesen Pufferspeicher übernommen und
dort gespeichert. Der Vorteil ist eine flimmerfreie Anzeige während des Zählvorganges.
Zur Ansteuerung der häufig verwendeten 7-Segment-Anzeigen gibt es spezielle Decoder-/TreiberSchaltkreise mit einigen nützlichen Zusatzfunktionen (Bild 8.3.2, unten):
^ LT
^ BL
^ RBI
^ RBO
Lampentest; alle Segmente werden gleichzeitig angesteuert,
Blank-Eingang zur Helligkeitssteuerung über ein entsprechendes Tastverhältnis
(alle Ausgangstransistoren können gesperrt werden),
Wird dieser Eingang über RBI = H aktiviert, so verlischt die Anzeige bei Eingabe
der Dezimalziffer Null, gleichzeitig erfolgt ein H/L-Wechsel am Ausgang RBO,
wird mit RBI des nächstniederwertigen Decoders verbunden.
Die Signale RBI und RBO dienen damit dem Ausblenden führender Nullen in der Anzeige.
CT 1
10 2
C
4
8
C
1 RG
2
4
8
STR
A
B
C
D
1 DC
2
4
8
a
b
c
d
e
f
g
E
Zähldekade
Register
Decoder
a
f
b
g
e
c
d
Anzeigeeinheit
UCC
RBI
A
B
C
D
1
2
4
8
DC
BL
RBI
RBO
(z.B. 74 247)
DC
A
D
a
....
:
:
:
g
BL
RBI
RBO
DC
Bild 8.3.2: Ansteuerung von LED-Anzeigeeinheiten
BL
a
:
lsd
:
g
A
D
BL
a
:
: msd
:
g
RBO
10
8. Interface-Schaltungen
2SWRNRSSOHU
Ein Optokoppler ist eine Kombination aus Lichtsender, Lichtempfänger und dem Koppelmedium
(IR-durchlässiges Glas, gasgefüllter Zwischenraum). Die Ansteuerung erfolgt mit einem Strom, das
Ausgangssignal ist ebenfalls meist ein Strom. Digitale Signale lassen sich mit Optokopplern relativ
problemlos und mit vertretbarem Aufwand übertragen. Der Optokoppler arbeitet dabei als Schalter,
seine nichtlineare Übertragungskennlinie, seine begrenzte Bandbreite und die relativ schlechte
Temperatur- und Langzeitkonstanz der Kennwerte können meist in Kauf genommen werden.
^ Durch das optische Koppelprinzip wird eine elektrische Potentialtrennung bzw. JDOYDQLVFKH
7UHQQXQJ zwischen Eingangskreis und Ausgangskreis realisiert.
*UXQGW\SHQYRQ2SWRNRSSOHUQ
Als RSWLVFKH6HQGHU werden LED eingesetzt (Bild 8.4.1). Die Wellenlänge des emittierten Lichtes
ist materialabhängig und liegt bei schnellen Optokopplern im roten bis infraroten Bereich:
GaASP mit λ = 660 nm, GaAlAs mit λ = 875 nm, GaAs mit λ = 930 nm.
^ Die Flußspannung der LEDs liegt typisch bei UF ≤ (1,5 ... 2,2) V und ist materialabhängig.
Die Ansteuerung erfolgt wie bei LED-Anzeigen durch den Ausgang einer Treiberschaltung.
Als )RWRHPSIlQJHU werden meist Fotodioden oder auch Fototransistoren eingesetzt. Oft werden
zusätzliche Schalttransistoren verwendet, um ein ausreichendes 6WURPEHUWUDJXQJVYHUKlOWQLV CTR
(current transfer ratio) zu erreichen.
I IN
I OUT
A
K
A
K
A
K
I IN
I OUT
C
E
B
Fotodiode
CTR (%) = 0,1
= 100 ns
tr , tf
I IN
A
Fototransistor, Typ CNY 17 - 4
CTR (%) = 320
tr , tf
= 9 µs
C1
C
A
DK
I IN
I
I OUT
OUT
C
K
Foto-Darlington-Transistor
Typ 4N 33
CTR (%) > 500
= 40 µs
tr , tf
E
K
R BE
Fotodiode/Darlington-Transistor
Typ 6N 135/136
CTR (%) = 20
tr , tf
= 200 ns
Bild 8.4.1: Grundtypen von Optokopplern (Quelle: Hewlett Packard)
E
8. Interface-Schaltungen
11
Optokoppler mit Fotodiode und Darlington-Stufe sind meist schneller als die mit Fototransistor.
Der externe Ableitwiderstand RBE verbessert das Schaltverhalten (Ausräumen der Basisladung,
Schaltzeitsymmetrierung). Speziell für den Einsatz zur seriellen Datenübertragung werden
Optokoppler mit vollständigem Logikinterface angeboten (Bild 8.4.2).
UCC
U
CC
A
A
&
&
Y
K
Y
K
EN
EN
GND
- mit O.C.- Ausgang
z.B. 6N 137, max. 5 MBaud
GND
- mit Gegentaktausgangsstufe
z.B. HCPL-2400, max. 40 MBaud
Bild 8.4.2: Optokoppler mit Logikinterfaces (Quelle: Hewlett Packard)
$QVWHXHUXQJYRQ/('LQRSWLVFKHQ6HQGHUQ
In /LFKWZHOOHQOHLWHU-Übertragungsstrecken (LWL) mit nicht extrem großer Datenrate und -länge
finden aus Kostengründen praktisch LED als optische Sender Anwendung (sonst Laser-Dioden).
In digitalen Systemen wird die LED im Prinzip nur an- und ausgeschaltet. Trotzdem müssen bei
hochwertigen und zuverlässigen Systemen Dynamik und ggf. das Temperaturverhalten der LED
berücksichtigt werden. Die Ansteuerschaltungen sind deshalb praktisch meist komplizierter, als in
den Prinzipschaltungen angegeben. Grundsätzlich kann dabei zwischen paralleler und serieller
Ansteuerung der LED unterschieden werden (Bild 8.4.3). Die folgenden Aussagen treffen sowohl
für LED als LWL-Sendediode als auch für LED in Optokopplern zu.
6HULHOOH$QVWHXHUXQJ:
Die LED wird durch den in Reihe liegenden Transistor geschaltet. Bei eingeschaltetem Transistor
fließt der Flußstrom IF durch die Diode und es wird Leistung aus der Stromversorgung entnommen
(Schaltimpulse). Mit einem sogenannten "Dunkelstrom" über R3 bei gesperrtem Transistor kann das
Einschaltverhalten verbessert werden (parasitäre Kapazitäten bleiben geladen). Bei Spannungswerten UF < (1,0 ... 1,2) V gibt eine LED praktisch keine auswertbare optische Leistung ab.
3DUDOOHOH$QVWHXHUXQJ:
Der Strom durch die LED wird durch einen parallelgeschalteten Transistor gesteuert. Infolge dieses
6WURPVFKDOWHU3ULQ]LSV bleibt die parasitäre Sperrschicht-Kapazität der LED geladen. Das wird
durch die zusätzliche Diode D noch unterstützt (erhöhte Vorspannung der LED).
Der Stromversorgung wird bei dieser Ansteuerung eine relativ konstante Leistung entnommen,
damit entstehen schwächere Stromimpulse als bei serieller Ansteuerung.
'\QDPLVFKH$QVWHXHUXQJ:
Der optische Ausgangsimpuls einer LED hat gegenüber dem elektrischen Ansteuerimpuls z. T.
stark vergrößerte Anstiegs- und Abfallzeiten (tr , tf). Ursachen dafür sind die Schaltzeiten von
Transistor und LED infolge parasitärer Kapazitäten. Eine Verbesserung des Schaltverhaltens und
damit eine Vergrößerung der Übertragungsgeschwindigkeit kann in gewissen Grenzen durch 3XOVHQ
der LED erreicht werden (Bild 8.4.3, Kapazität CP ).
12
8. Interface-Schaltungen
Wird die LED leitend, so fließt kurzzeitig ein höherer Strom IF, Pulse (CP überbrückt Widerstand R2).
Das bewirkt eine Verringerung der Anstiegszeit des optischen Ausgangssignales. Stationär wird der
Flußstrom IF durch R1 und R2 auf IF, stat < IF, Pulse begrenzt. Soll auch die Abfallzeit des optischen
Impulses reduziert werden, so eignet sich eine Gegentaktstufe zur Ansteuerung (Bild 8.4.3, rechts).
UCC
UCC
R1
R2
UCC
R1
74AS 40
D1
Cp
R2
D1
R1
D1
D2
R2
R3
Cp
Cp
R3
Bild 8.4.3: Schaltungen zum "Pulsen" von LED in optischen Sendern
hEHUVWHXHUXQJGHV(PSIlQJHUV
Die zulässige Länge einer Übertragungsstrecke wird durch den Dynamikbereich des Empfängers
begrenzt. Dabei ist zu beachten, daß beim LH-Übergang des optischen Signales P der Flußstrom im
optischen Sender (LED) ggf. reduziert werden muß, um eine Übersteuerung des Empfängers zu
verhindern (Bild 8.4.4).
5V
R1
U CC
Optokoppler
C
(1,5 nF)
R
optisches Signal
Uo
P
P
mit C
Uo
150 ns
&
E
Treiber (75 451)
Bild 8.4.4: Empfängerschaltung mit Optokoppler
^ Eine Übersteuerung führt bei gleichspannungsgekoppelten Empfängern (LWL, Optokoppler)
zu Impulsverzerrungen in Form von*OLWFKHV. Wird im Sender des Optokopplers durch den
Pulsbetrieb gleichzeitig die Anstiegs- und Abfallzeit verringert, so kann ein ]XVlW]OLFKHU
Impuls am Ende des eigentlichen Ausgangsimpulses auftreten. Dieses Überschwingen tritt
immer beim LH-Übergang am Ausgang des Empfängers auf, wenn er übersteuert wird.
^ Bei geringer Datenrate kann das zu Lasten einer vergrößerten Abfallzeit des optischen
Signals zum Empfänger verhindert werden (Unsymmetrie der Verzögerungszeit der Strecke).
8. Interface-Schaltungen
13
%XVVFKDOWXQJHQ
Bei der Realisierung von %XVV\VWHPHQ werden Gatter mit offenem Kollektor bzw. mit TristateAusgangsstufe als Sender verwendet (vgl. auch Abschnitt 4). Durch Bemessung der Schaltung
müssen sowohl die Logikpegel des Bussignals als auch die Kennwerte angeschlossener logischer
Eingänge, von $Q]HLJHHOHPHQWHQ o.ä. gesichert werden.
Eine :RUVW&DVH%HPHVVXQJ der Schaltungen (Bild 8.5.1, Bild 8.5.2) wird in Abschnitt 8.6 gezeigt.
6HQGHUPLWRIIHQHP.ROOHNWRU
Als Sender werden Schaltkreise mit offenem Kollektor eingesetzt. Die Ausgänge sind dabei parallel
geschaltet und realisieren so die logische Verknüpfung ZLUHG$1' der einzelnen Ausganssignale.
Bild 8.5.1 zeigt ein Bussystem mit n Sendern und m Empfängern, weiter ist ein Optokoppler OK
(V\VWHPIUHPGHV Element bezgl. der Logikschaltkreise) zur galvanischen Trennung angeschlossen.
UCC
OK
E1
&
Empfänger
UF
Em
........
&
Rv
BUS
&
≥1
&
Sender
S2
S1
Sn
.....
GND
UBUS
Bild 8.5.1: Bussystem mit Open-collector-Gattern
6HQGHUPLW7ULVWDWH6WXIHQ
Eine Busschaltung für Sender mit Tristate-Stufen und /HLWXQJVDQSDVVXQJ zur Unterdrückung von
Reflexionen (vgl. Abschnitt 11) zeigt Bild 8.5.2.
Wegen der großen Ströme durch die niederohmigen Anpaßwiderstände R = Z ≈ (30 ... 300) Ω
werden als Sender spezielle Treiberschaltkreise mit hohen Ausgangsströmen IOLmax benötigt.
E1
Empfänger
E2
.....
R
R
E1 ... E m
U CC
Em
BUS
S1
S2
.....
Sn
Kennwerte der Busleitung:
Sender
S1 ... S n
OE 1
OE 2
OE n
U
GND
Bild 8.5.2: Bussystem mit Tristate-Treibern und Leitungsanpassung
BUS
Wellenwiderstand Z,
Laufzeit τ
14
8. Interface-Schaltungen
=XU:RUVW&DVH%HPHVVXQJGLJLWDOHU6FKDOWXQJHQ
Wesentliches Merkmal der Bemessung digitaler Schaltungen ist, daß die aus der 6FKDOWXQJVVWUXNWXU
gewonnenen Netzwerkgleichungen (Knotensatz, Ohmsches Gesetz) mit min/max-Forderungen an
bestimmte Kennwerte in 8QJOHLFKXQJHQ überführt werden. Diese Forderungen an die Pegelwerte
(Strom, Spannung) werden aus der zu realisierenden logischen )XQNWLRQ der Schaltung abgeleitet
und repräsentieren die elektrischen Randbedingungen für die Einhaltung der Logikpegel L bzw. H.
Bei der $XVZDKO'LPHQVLRQLHUXQJ der Bauelementeparameter müssen neben den Nennwerten auch
deren Toleranzen beachtet werden. Aus Fertigungs- und Kostengründen werden möglichst grob
tolerierte Bauelementewerte verwendet; Einstellelemente sind i.a. nicht zugelassen.
^ Meist wird der VFKOHFKWHVWH)DOO(worst-case)für die Bemessung der Schaltung angenommen.
Dieser ergibt sich aus der zu realisierenden logischen Funktion mit den dafür notwendigen
Betriebsparametern einschließlich ihrer Toleranzen und ggf. aus der Schaltungsstruktur.
7RWDOHV)HKOHUGLIIHUHQWLDO
Der worst-case-Fall bezgl. der Toleranzen der Bauelemente- und Modellparameter wird allgemein
mit Hilfe des WRWDOHQ 'LIIHUHQWLDOV der Funktion y = f(x1 , ..., xn ) bestimmt. Dabei wird das
Differential df näherungsweise durch df O f ersetzt. Nach /HLEQL] gilt:
(i)
n
df = f dx j
j=1 x j
(totales Differential),
(ii)
d(f + g) = df + dg
(Summenregel),
(iii)
d(f . g)
= (df) . g + f . dg
(Produktregel),
(iv)
d2 x j
= 0
("unendliche Kleinheit").
^ Man beachte, daß (iv) nur für XQDEKlQJLJH Variable gilt.
f(x)
df
dx > 0
f max
df
<0
dx
f min
x
x min
x max
x min
x max
Bild 8.6.1: Zum totalen Fehlerdifferential einer Funktion y = f(x)
9HUHLQEDUXQJ:
Eine toleranzbehaftete Kenngröße A = A N A wird durch den Nennwert AN und die Toleranz A
beschrieben. Der obere/untere Wert von A wird mit A = A N + A bzw. A = A N − A bezeichnet.
Sind Verwechslungen mit Grenzwerten ausgeschlossen, wird auch Amax , Amin verwendet.
8. Interface-Schaltungen
15
%HLVSLHO:
Für die in Bild 8.6.2 gezeigte Spannungsteilerschaltung werde für Ue = UeH eine Ausgangsspannung
UaH ≥ UaHmin (z.B. U aH min P 12 U eH ) gefordert. In der Transistorschaltstufe sei U aH := U CEy P U aH min
(z.B. U aH min P 12 U CC ) für gesperrten Transistor zu realisieren.
UCC
RC
IR
R1
I1
RB
I2
R2
Ue
Ua
IB
Ue
IL
IC
RL
UCE
Bild 8.6.2: Spannungsteiler und Transistorschalter
Nachfolgend sind die Schritte zur worst-case-Analyse bezgl. der Forderung UaH ≥ UaHmin der beiden
Beispielschaltungen angegeben:
Knotensatz:
Spannungsteiler
Transistorschalter
I1 - I2 = 0 ,
IR = IL + IC ,
Knotenspannungen einsetzen:
Ue − Ua Ua
−
= 0,
R1
R2
U CC − U CE U CE
=
+ I C , U CE := U a ,
RC
RL
Knotengleichung nach kritischer Größe auflösen und worst-case-Fall bestimmen:
U aH =
R2
R1 + R2
U eH P U aH min ,
U aH =
RL
RC + RL
U CC − I Cy R C || R 2 P U aH min .
Auswertung:
D6SDQQXQJVWHLOHU
Wir erhalten die Bemessungsbedingung R 2 P R 1 für U aH min P 1 U eH . Damit wird nur etwas über
2
das geforderte 9HUKlOWQLV der beiden Widerstandswerte ausgesagt. Zur Festlegung der Absolutwerte
müssen weitere Überlegungen (Stromergiebigkeit der Signalquelle, Verlustleistung, ...) angestellt
werden. Da oft keine entsprechenden Gleichungen aus der Schaltung selbst abgeleitet werden
können, spielt hier die praktische Erfahrung des Entwicklers eine wichtige Rolle.
E7UDQVLVWRUVFKDOWHU
Bei ICy = 0 erhalten wir die Bemessungsbedingung R L P R C für U aH min P 1 U CC ; prinzipiell gelten
2
auch hier die o.g. Aussagen. Nach Festlegung der Widerstandswerte RC , RL wird geprüft, ob der
Spannungsabfall infolge des Reststromes ICy zugelassen werden kann; ggf. ist eine mehrfache
Iteration erforderlich.
16
8. Interface-Schaltungen
3UDNWLVFKHV9HUIDKUHQGHU:RUVW&DVH$QDO\VH
Bei Anwendung des Knotenspannungsverfahrens wird die WHFKQLVFK SRVLWLYH 6WURPULFKWXQJ ein
wichtiges Kriterium für den Aufwand bei einer Worst-Case-Analyse. Werden alle Zweigströme in
den Knotengleichungen mit der technisch positiven Stromrichtung notiert, so entscheidet allein das
Operationszeichen vor dem Zweigstrom über das Vorzeichen der partiellen Ableitung. Damit wird
die Bestimmung der partiellen Ableitungen praktisch sehr einfach und Fallunterscheidungen im
Sinne der %HWUDJVUHFKQXQJ werden vermieden. Dabei wird vorausgesetzt, daß die Zweigströme
selbst voneinander unabhängig sind.
^ Vorteilhaft notiert man die Forderungen für die beiden Schaltzustände (Low, High) getrennt,
da sich typisch die Stromrichtungen ändern.
Nach Ersetzen der Zweigströme durch die Knotenspannungsdifferenzen und den Zweigwiderstand
(Ohmsches Gesetz) erhalten wir aus den Knotengleichungen die Knotenspannungsgleichungen mit
einfachen gebrochen-rationalen Ausdrücken.
Bei XQDEKlQJLJHQParametern ist die Auswertung des totalen Differentials auch hier einfach, da die
Größen in diesen gebrochen-rationalen Ausdrücken selbst positive Werte sind. Für Größen im
=lKOHU mit positivem/negativem Operationszeichen ist die partielle Ableitung positiv/negativ. Für
Parameterwerte im 1HQQHU gelten die umgekehrten Zuordnungen.
$EKlQJLJH.HQQZHUWH
In den meisten praktischen Anwendungen treten in den Knotenspannungsgleichungen voneinander
DEKlQJLJH Kennwerte auf, für die gleichzeitig Forderungen erhoben werden.
Bei einem Transistorschalter sind das typisch die Strom-/Spannungswerte an der Basis-Emitterbzw. an der Kollektor-Emitter-Strecke des Transistors. Bei integrierten Schaltkreisen sind es die
Strom-/Spannungswerte (UOLmax , IOLmax), (UOHmin , IOHmax), (UILmax , IILmax), (UIHmin , IIHmax) für die
Logikpegel am Ein- und Ausgang.
Im Prinzip stellen die beiden voneinander abhängigen Größen (Umax bei Imax ) bzw. (Umin bei Imax )
den Worst-Case-Fall des ohmschen Gesetzes für den Eingang oder Ausgang zur Einhaltung des
betreffenden Logikzustandes dar. Die Werte ergeben sich aus der konkreten Innenschaltung und
begrenzen die maximale Verlustleistung im Schaltkreis in den logischen Zuständen H bzw. L.
^ Die Forderung auf das JOHLFK]HLWLJH Einhalten der voneinander abhängigen Variablen führt
formal auf die Auswertung von mehreren Ungleichungen und ist entsprechend aufwendig.
Praktisch einfacher kann man wie folgt verfahren:
Wir werten nur HLQH Forderung (typisch Spannnung) zur Einhaltung des Logikpegels aus, wobei wir
dem zweiten Kennwert SHU'HILQLWLRQ die angegebene Größe zuordnen, also
(UOLmax bei IOLmax ), (UOHmin bei IOHmax ), (UILmax bei IILmax ), (UIHmin bei IIHmax ).
^ Damit sichern wir das Einhalten beider Kennwerte und somit den entsprechenden logischen
Zustand am Schaltkreis (vgl. Beispiel 1 in Abschnitt 8.6.4).
8. Interface-Schaltungen
17
(UVDW]VFKDOWXQJHQIU(LQXQG$XVJDQJVVWXIHQLQWHJULHUWHU6FKDOWNUHLVH
Ein praktikables Hilfsmittel zur Festlegung der positiven Stromrichtung sind HLQIDFKHQLFKWOLQHDUH
0RGHOOH für die Ein- und Ausgangsstufen der Schaltkreise. Dabei können für die verschiedenen
Schaltkreisfamilien weitgehend einheitliche Ersatzmodelle verwendet werden.
^ Sie liefern die TXDOLWDWLYH Information über die positive 6WURPULFKWXQJ, die quantitativen
Werte sind dem Datenkatalog des verwendeten Schaltkreises zu entnehmen.
(UVDW]VFKDOWXQJHQIU(LQJDQJVVWXIHQ
77/(LQJlQJH
Für alle TTL-Eingangsstufen (Multiemitter, Schottky-Dioden, Dioden-Cluster, pnp-Transistor... )
liefert die in Bild 8.6.3 gezeigte einfache Dioden-Ersatzschaltung die Information über die positive
6WURPULFKWXQJ des Eingangsstromes IIH , IIL bei einem entsprechenden logischen Eingangssignal. Zu
beachten sind die unterschiedlichen Beträge der Ströme bei den einzelnen Realisierungsvarianten
(Datenblatt).
&026(LQJlQJH:
Für CMOS-Eingänge kann ebenfalls ein Dioden-Ersatzschaltbild verwendet werden. Da aber die
VWDWLVFKHQ Eingangsströme von CMOS-Gattern praktisch Null sind (rGS → ∞ in Bild 8.6.3 b), kann
die zugehörige Ersatzschaltung noch weiter vereinfacht werden.
U
CC
R
U
CC
R
e
e1
2
I
I IL
U
CC
R
B
I IH
I= 0
GND
a) TTL-Eingang
U
IL
GND
OUT
GND
U
IH
B
I = I B + 2 IIH
GND
Dioden-Ersatzschaltung
U
DD
r
GS
U
DD
IN
U
IH
I
I IL = 0
U IL
U
DD
Z
I IH = 0
Z
GND
U IH
rGS
GND
b) CMOS-Inverter
Bild 8.6.3: Nichtlineare Eingangs-Ersatzschaltungen integrierter Schaltkreise
18
8. Interface-Schaltungen
(UVDW]VFKDOWXQJHQIU$XVJDQJVVWXIHQ
$XVJDQJVVWXIHQPLWRIIHQHP.ROOHNWRU (nur TTL):
Die CE-Strecke des Transistors wird in beiden Fällen (Transistor leitend/gesperrt) als Widerstand
rCE mit rON := rCEx << rOFF := rCEy betrachtet. Damit ist die technisch positive Stromrichtung bei den
Spannungswerten UOL , UOH ≥ 0 festgelegt (Bild 8.6.4 a). Der leitende Transistor (rON) erzeugt den
tiefen Spannungspegel UOL, der gesperrte Transistor (rOFF) kann aber den hohen Ausgangspegel UOH
nicht erzeugen. Dazu wird eine externe Schaltung (pull-up-Widerstand Rext) benötigt; der Zustand
UOL erfordert jetzt den externen leitenden Transistor Text.
Zu beachten ist, daß die Ströme IOZH /IOZL Kennwerte für gesperrte Transistoren EHL UOH /UOL sind,
aber es sind NHLQH Kennwerte für die Logikpegel UOH , UOL.
*HJHQWDNW$XVJDQJVVWXIHQ
Bei Gegentaktstufen im sogenannten Normalbetrieb ist VWDWLVFK stets einer der beiden Transistoren
der Ausgangsstufe leitend und der andere gesperrt. Der gesperrte Transistor kann als hochohmiger
Widerstand Z >> R betrachtet werden. Die Schaltstrecke des leitenden Transistors ist niederohmig
und erzeugt den entsprechenden Ausgangspegel, solange die zugehörigen Kennwerte eingehalten
werden. Daraus folgen die angegebenen positiven Stromrichtungen in den logischen Zuständen. Die
Ersatzschaltung gilt bis auf die Symbolik der Transistoren auch für CMOS-Gegentaktstufen.
Kritisch ist der Umschaltbereich der Gegentaktstufen; zur schnellen Umschaltung werden Mindestforderungen an die Anstiegszeiten (Flanken) der Eingangssignale gestellt.
U
CC
U
I
IO
OL
rON
UO
UCC
CC
R ext
r
OFF
UOL
R ext
IOZL , I
OZH
U ,U
OL OH
Text
a) Ausgang mit offenem Kollektor
U
CC
U
CC
Z
I
I
O
UO
I
U
CC
I
I Bx
OL
OH
Z
UOH
UOL
Bx
b) Gegentaktausgang (Normalbetieb)
U
CC
I
OE
Z
O
U
O
U
CC
I1
I
OZL
I2
Z
I >I
1 2
I1
Z
Z
U
CC
IOZH
I2
U OL
Z
U
OH
Z
I < I für UOH > ½ U CC
1 2
c) Gegentaktausgang im Tristate-Zustand
Bild 8.6.4: Ersatzschaltungen für Ausgangsstufen integrierter Schaltkreise; positive Stromrichtung
in den Logikzuständen
8. Interface-Schaltungen
19
*HJHQWDNW$XVJDQJVVWXIHQPLW7ULVWDWH6WHXHUXQJ:
Bei aktivem 6WHXHUVLJQDO OE (Output Enable) arbeiten Gegentakt-Stufen mit Tristate-Steuerung
wie oben für den Normalbetrieb beschrieben. Bei passivem Steuersignal OE sind gleichzeitig beide
Transistoren der Ausgangsstufe gesperrt. Die Transistor-Schaltstrecken (CE bei Bipolartransistoren,
DS bei FET) können als hochohmige Widerstände Z >> R betrachtet werden.
Sind weitere Ausgangsstufen mit dem Ausgang der betrachteten Stufe verbunden (Busschaltung)
und erzeugen einen Spannungspegel UO , dann ist der Strom IO der gesperrten Stufe (IOZL, IOZH)
abhängig von dieser H[WHUQ erzeugten Spannung UOL, UOH . Bei unbeschaltetem Tristate-Ausgang
ergibt sich wegen IO = 0 (I1 = I2 in Bild 8.6.4 c) eine Ausgangsspannung U OZ O 12 U CC .
Zu beachten ist auch hier, daß die Ströme IOZH, IOZL Kennwerte für gesperrte Ausgangsstufen EHL
UOH bzw. UOL am Schaltkreisanschluß sind, aber es sind QLFKW die Stromkennwerte für die
Logikpegel UOH , UOL selbst.
%HLVSLHOH]XUZRUVWFDVH%HPHVVXQJ
%HLVSLHO:
6HQGHUVWXIHQPLWRIIHQHP.ROOHNWRU
Bild 8.6.5 zeigt ein Bussystem mit n OC-Gattern als Sender und m Empfängern. Zu bemessen ist
der pull-up-Widerstand R in Abhängigkeit der Anzahl von Teilnehmern am Busbetrieb. Dabei sei
angenommen, daß Sender und Empfänger der gleichen TTL-Schaltkreisreihe eingesetzt werden.
U
S1
CC
E1
I
R
UBus = L
&
E2
≥1
S2
Sn
1
m I IL
UOL
I
OL
(n-1) I OZL
:
:
:
Em
:
:
:
I
UBus = H
RL
RH
UOH
m I IH
U
Bus
n I OZL
a) Busschaltung mi OC-Gattern
b) Zweigströme für Pegel L, H
Bild 8.6.5: Bussystem mit Open-collector-Gattern
=XU%HPHVVXQJGHV:LGHUVWDQGHV5
Der kritische Fall (ZRUVWFDVH) für die Bemessung ergibt sich hier aus folgenden Überlegungen zur
Funktionsweise der Schaltungsanordnung:
1) UBus = L:
Ein Ausgang sendet Low-Signal, die Ausgangstransistoren aller anderen Sender sind gesperrt. Der
gesättigte Transistor des aktiven Senders muß also den maximalen Strom aufnehmen, der aus der
Betriebsspannung UCC über den Widerstand R und die m Eingänge "angeboten" wird. Wird in
diesem Fall die Größe UOLmax bei IOLmax eingehalten, dann sicher auch in dem Fall, daß weitere
Ausgangstransistoren leitend werden (Stromrichtung von IOZL !).
20
8. Interface-Schaltungen
2) UBus = H:
Gesperrte Ausgangstransistoren der Senderstufen wirken wie nach Masse geschaltete hochohmige
Widerstände rCEy → ∞ und können somit keine H-Spannung erzeugen. Diese Aufgabe muß der
pull-up-Widerstand R übernehmen. Bei seiner Bemessung ist der Spannungsabfall an R infolge der
m Eingangsströme IIH und der n Restströme IOZH durch die gesperrten Ausgangstransistoren zu
beachten. Die Busspannung muß mindestens den Wert UIHmin erreichen. Meist wird UBUS H ≥ UOHmin
(Ausgangs-High-Spannung von Gegentaktstufen) realisiert, damit auch hier der typische TTLStörabstand SH = UOHmin - UIHmin für den H-Fall gesichert wird.
:RUVWFDVH%HPHVVXQJIU8%XV/ 82/d82/PD[
Aus der Knotengleichung bei/RZ3HJHO auf der Busleitung (vgl. Bild 8.6.5 b, Zweigströme)
I OL = I RL + m I IL − (n − 1) I OZL
mit I RL =
U CC − U OL
R
erhalten wir für die Ausgangsspannung U OL > U OL max (bei I OL > I OL max ) und unter Beachtung der
NULWLVFKHQ*U|HQ (, , min, max ) der übrigen Kennwerte die Forderung:
U OL = U CC − R I OL max − m I IL + (n −1) I OZL > U OL max (bei I OL > IOL max ) .
In diesem speziellen Falle kann äquivalent die Forderung nach Einhaltung des Stromwertes
Î OL =
U CC − U OL max
+ m I IL − (n −1) I OZL > I OL max (bei U OL > U OL max )
R
verwendet werden. Die beiden Ungleichungen sind bezgl. IOLmax und UOLmax identische Ausdrücke.
Für die Eingangsströme IIL ist I IL := I IL max einzusetzen.
:RUVWFDVH%HPHVVXQJIU8%XV+t82+PLQ
Für+LJK3HJHO auf der Busleitung (vgl. Bild 8.6.5 b, Zweigströme) gilt:
n . IOZH = IRH - m . IIH
I RH =
mit
U CC − U OH
.
R
Daraus folgt für den worst-case- Fall die Forderung (IOZH ist NHLQ Kennwert für Logikpegel H !):
. I
U OH = U CC − R n
OZH
. I
+ m
IH
P U OH min mit I IH := I IH max .
$XVZHUWXQJ
Für Widerstandswerte R > R > R erreicht die Busspannung sicher sowohl L- als auch H-Pegel. Es
ist:
U CC − U OL max
.
I OL max − m I IL max + (n −1) . I OZL
> R>
U CC − U OH min
. I OZH
n
+ m . I IH max
.
8. Interface-Schaltungen
21
%HLVSLHO:
6HQGHUVWXIHQPLWRIIHQHP.ROOHNWRU
Ein Bussystem mit n Sendern (OC-Ausgang), m Empfängern und einem Optokoppler OK zur
galvanischen Trennung ist in Bild 8.6.6 angegeben.
E1
&
I
I
&
OK
&
I
IL
OL
UCC
Em
........
I
&
R
IL
I
I
OZL
≥1
F
BUS
OZL
.......
U
OL S 2
S1
Sn
Bild 8.6.6: Bussystem mit Open-collector-Gattern und Optokoppler
=XU%HPHVVXQJGHV:LGHUVWDQGHV5:
Dabei wird angenommen, daß gleichartige Sender und Empfänger verwendet werden. Aus den
Knotengleichungen folgen mit den Forderungen nach Einhaltung der Logikpegel auf der Busleitung
die beiden Bedingungen:
1)
U Bus L = U CC − U F − R I OL − m IIL max + (n −1) I OZL
2)
U Bus H = U CC − U F − R m . I IH max + n
. I
OZH
> U OL max , vgl. Hinweis *)
P U OH min .
Zusätzlich wird bei UBus = L für die LED des Optokopplers ein minimaler Flußstrom IFmin gefordert:
3)
IF =
U CC − U F − U OL max
P I F min .
R
Für den Widerstand R erhalten wir:
U CC − U F − U OL max
I OL max − m I IL max + (n −1) I OZL
> R > min ( R, R ) .
R steht für den Widerstandswert nach Forderung (2), R für den Widerstand gemäß Forderung (3).
Wegen IF > m IIH + n IOZH gilt R > R .
Hinweis *):
Da bereits für IFmin der obere Wert der Flußspannung U F angenommen wird (Forderung 3), ist U F
auch bei IF ≥ IFmin (Forderung 1) als kritischer Wert einzusetzen. Das folgt auch aus der typischen
Angabe der Hersteller für LED: U F > U F max für I F min > I F > 20 mA (Steilheit der Diodenkennlinie).
22
8. Interface-Schaltungen
%HLVSLHO:
%XVVFKDOWXQJPLW7ULVWDWH6WXIHQ
Eine Busschaltung mit Tristate-Schaltstufen für die Sender bei gleichzeitiger /HLWXQJVDQSDVVXQJ
zur Unterdrückung von Reflexionen zeigt Bild 8.6.7. Wegen der relativ großen Ströme durch die
niederohmigen Anpaßwiderstände R = Z werden spezielle 7UHLEHUVFKDOWNUHLVH mit relativ hohen
Ausgangsströmen IOLmax als Sender verwendet, z. B. 74 LS 245 (IOL max = 64 mA, UOL max = 0,55 V).
E1
Empfänger
E2
U CC
Em
.....
R
E ... E
1
m
R
I2
I IL
S1
I IL
I
I
.....
S
OL 2
Sender
S ... S
1
n
IL
BUS
Sn
I OZL
IOZL
OE 1
OE 2
I1
U
OE n
UOL
BUS
GND
Bild 8.6.6 : Bussystem mit Tristate-Treibern und Leitungsanpassung
=XU$Q]DKOYRQ%XVWHLOQHKPHUQ
Bei Low-Pegel auf dem Bus (1 Sender aktiv) haben wir mit den Stromrichtungen in Bild 8.6.6 die
Knotengleichung
I OL = I 1 + I 2 + m I IL + (n − 1) I OZL
mit
I1 O I2 = IT .
Mit der Forderung
U OL > U OL max bei I OL > I OL max
folgt unter Beachtung der kritischen Kennwerte und R1,2 := Z
U OL = U CC − 2 . Z IOL max −m ÎIL − (n −1) ÎOZL > U OL max
bzw. als äquivalente Bedingung
Î OL = 2 Î T + m Î IL + (n −1) Î OZL > I OL max mit Î T =
U CC − U OL max
.
Z
Für die zulässige Anzahl n von Sendern folgt in Abhängigkeit der Kennwerte und der Anzahl m
angeschlossener Empfänger
n >
I OL max − m Î IL − 2 Î T
+1 .
Î OZL
^ Der begrenzte Ausgangsstrom IOLmax der Sender zur Einhaltung des L-Pegels UOLmax auf der
Busleitung erzwingt die Begrenzung der Teilnehmerzahl n, m. Bei höheren Anforderungen an
die '\QDPLN (Anstiegs- und Verzögerungszeiten) wird die Anzahl n, m weiter eingeschränkt,
da die /DVWNDSD]LWlW mit der Zahl von Teilnehmern wächst.
8. Interface-Schaltungen
23
%HLVSLHO
77/(LQJDQJ,QWHUIDFHVFKDOWXQJPLWSQS7UDQVLVWRU
Für die im Bild 8.6.7 gegebenen Schaltungen ist der Widerstand am Eingang des TTL-Gatters zu
bemessen.
U CC
UCC
R2
I Cx
IB
I IL
Rp
R1
UIL
Ue
R
I
TTL
IC
I Cy
IR
TTL
I
U IH
UI
R
I
U IL
IH
IL
I
R
Zweigströme
Bild 8.6.7: TTL-Eingang, Interfaceschaltung mit pnp-Transistor
D77/(LQJDQJ
Soll bei angeschlossenem Widerstand Rp der TTL-Eingang L-Pegel erkennen, so folgt aus
U IL = R p
.
I IL > U IL max
für den Widerstand die Bemessungsbedingung
Rp >
U IL max
mit
I IL max
I IL := I IL max .
Diese Anforderung an die Bemessung eines Widerstandes am Eingang eines TTL-Gatters haben wir
in verschiedenen Anwendungsschaltungen (Bild 8.6.7 b), Bild 8.6.8).
E,QWHUIDFHVFKDOWXQJPLWSQS7UDQVLVWRU
Die Ströme IC und IR fließen immer in der im Schaltbild angegebenen Richtung. Für die Eingangsspannung gilt U I = R . I R = R . (I C I I ). Der kleinere Pegel UIL < UIH kann wegen I CX >> I Cy nur bei
gesperrtem Transistor erzeugt werden. Wir erhalten die Forderungen:
für L-Pegel:
U IL = R ( I IL + I Cy ) > U IL max ,
für H-Pegel:
U IH = R ( I Cx − I IH ) P U IH min .
Daraus folgt für die Bemessung des Widerstandes R:
U IH min
I Cx − I IH max
>R>
U IL max
I IL max + I Cy
.
Für den Strom ICx steht praktisch ein großer Wertebereich zur Verfügung (Auswahl des Transistors,
Bemessung der Widerstände R1, R2), so daß die Erzeugung des H-Pegels kein praktisches Problem
bereitet.
24
8. Interface-Schaltungen
%HLVSLHO:
,PSXOVVFKDOWXQJHQVWDWLVFKH$QIDQJVEHGLQJXQJHQ
Bild 8.6.8 zeigt zwei Impulsschaltungen mit RC-Glied. In beiden Schaltungen wird gefordert, daß
die Eingangsspannung UI des Negators N für Zeiten t < t0 (Anfangsbedingung) L-Pegel annimmt.
&
R
Y
E
C
&
Y
S
C
R
UI N
S
E
H
UI N
H
L
L
t
t
Y
Y
H
tH
H
tH
L
L
t
t0
t0
a) Flankendetektor
t
b) Monoflop mit Logikgattern
Bild 8.6.8: Impulsschaltungen, statische Anfangsbedingungen
D)ODQNHQGHWHNWRU
Für E = L gilt Y = H. Springt E zum Zeitpunkt t = t0 auf H, so ist Y vom Ausgangssignal des
Negators N abhängig. Gilt UI = 0 für t < t0, so kann sich der Negatorausgang erst ändern, wenn seine
Eingangsspannung UI mindestens die Schaltschwelle US erreicht (Ladevorgang am Kondensator).
Für diese +DOWH]HLW tH schaltet Y auf L-Pegel und signalisiert somit eine positive Flanke an E.
Die Forderung nach L-Pegel am Negatoreingang für t < t0 liefert die worst-case-Bemessung des
Widerstandes R, wenn als Logikgatter TTL-Schaltkreise eingesetzt werden:
U IL = I IL R + U EL > U IL max G R >
U IL max − U EL
.
I IL
E0RQRIORSPLW77//RJLNJDWWHUQ
Ein stabiler Anfangszustand der Schaltung ergibt sich für t < t0 bei S = H und Y = H. Dazu muß der
Negator N mit Low angesteuert werden. Damit folgt für die Bemessung des Widerstandes R:
U IL = I IL R > U IL max G R >
U IL max
.
I IL
Zu den detaillierten Zeitverläufen in den Schaltungen vgl. auch Abschnitt 5.
9. Halbleiter-Speicher
9.
9.1
1
Halbleiter-Speicher
Allgemeiner Überblick
Speicher für binäre Signale gehören neben den Verknüpfungsgliedern zu den Elementarbausteinen
digitaler informationsverarbeitender Systeme (Rechner, Steuerungen, ...). Sie finden Verwendung als
Programm- und Datenspeicher in Rechnern, als Speicher für Funktionstabellen und zur Realisierung
allgemeiner logischer Funktionen (sequentielle Schaltungen, Schaltwerke ...).
{ Speicher haben die Aufgabe, kodierte Informationen (Daten) aufzunehmen (schreiben, write),
zu speichern und auszugeben (lesen, read).
{ Speicherglieder können Signale aufnehmen, speichern und abgeben (DIN).
Nach ihrer internen Organisationsform werden Halbleiterspeicher in die Gruppen Umlaufspeicher
und Matrixspeicher mit grundsätzlich unterschiedlicher Wirkungsweise eingeteilt (Bild 9.1).
00
01
02
03
E
w0
10
11
12
13
20
21
22
23
1
2
3
4
8
7
6
5
Clock
w1
w2
A
30
31
32
33
Linienorganisation (SAM)
w3
B0
B0 B1
B 1 B2
B2 B3
B3
Matrixorganisation (RAM)
Bild 9.1: Interne Organisation von Halbleiterspeichern
Umlaufspeicher bestehen typisch aus 1 ... k parallel geschalteten Schieberegistern und werden nur
für kleine Speicherkapazitäten verwendet. Der Zugriff auf die Information einer Speicherzelle erfolgt
i.a. sequentiell, daher der Name serielle Schiebespeicher (serial-access-memory, SAM).
{ Die mittlere Zugriffszeit ist größer als bei Matrixspeichern (maximal n Taktimpulse).
Bei Matrixspeichern sind die einzelnen Speicherzellen in N Zeilen und M Spalten angeordnet. Aus
technologischen Gründen wird eine quadratische Matrix angestrebt. Diese Anordnung der Zellen
führt auf eine relativ geringe Anzahl von Adreßleitungen und damit Anschlüssen am Schaltkreis. Der
Grenzfall M = 1 oder N = 1 führt auf das Parallelregister (vgl. Abschnitt 5).
{ Matrixspeicher gestatten im Gegensatz zu Umlaufspeichern den wahlfreien Zugriff auf eine
beliebige Speicherzelle mit nahezu gleicher Zugriffszeit (random access memory, RAM). Sie
sind meist wortorganisiert, d.h. bei Anlegen einer Adresse werden gleichzeitig mehrere
Speicherzellen aktiviert, z.B. ein 8-bit-Wort.
2
9. Halbleiter-Speicher
Bild 9.2 zeigt einen 256 x 4 bit-organisierten ROM. Die Speichermatrix ist in 4 Blöcke mit je 8
Spaltenleitungen aufgeteilt. Die 8-Bit-Adresse A ist in die zwei Anteile AH = X (Zeilendecoder) und
AL = Y (Spaltendecoder, Multiplexer) aufgespaltet. Mit den 4 Multiplexern (8-auf-1) wird so immer
genau eine Spaltenleitung eines Blockes auf den Ausgang durchgeschaltet.
Mit jedem 8-bit-Adreßwort A = A7 A6 ... A0 wird genau eines der 256 Worte zu je 4 Bit ausgewählt.
Es ergibt sich intern eine quadratische 32 x 32 bit-Matrix.
0 ... 7
X
A7
A6
A5
A4
A3
16
8
4
2
1
0 ... 7
0 ... 7
0 ... 7
1
2
Matrix
3
(32 x 32 bit)
:
:
:
N-1
N
DC 0
1
2
:
:
:
30
31
M
1
Y
A2
A1
A0
0 ... 7
EN
0 ... 7
EN
0 ... 7
EN
0 ... 7
Multiplexer
EN
CS
1
allgemein:
2
3
4
Adreßleitungen
n = X + Y, Wortleitungen N = 2 X,
Wortbreite
B
Bitleitungen
M = 2 Y B,
.
X
+
Y
n
Speicherkapazität K = N M = 2
B = 2 B.
Bild 9.2: 256 x 4 bit - Festwertspeicher mit interner 32 x 32 bit - Matrix und Multiplexern
Wichtige Parameter von Halbleiterspeichern aus Anwendersicht sind die Speicherkapazität K, die
Wortbreite B und die Zugriffszeit tac (bzw. Zykluszeit) als Maß für die Geschwindigkeit der Informationsverarbeitung. Bei B = 8 bit, tac = 200 ns ist eine Datenrate von 40 Mbit/s möglich.
{ Dazu kommen wie bei allen Halbleiterschaltkreisen weitere Kennwerte wie Leistungsbedarf,
Betriebsspannung und ihre Zuschaltcharakteristik, Zuverlässigkeit (Bitfehlerrate).
Bei Halbleiterspeichern wird unterschieden zwischen Schreib-Lese-Speichern (RWM, RAMs),
Nur-Lese- Speichern (ROMs, EPROMs) und Meist-Lese-Speichern (RMMs).
Schreib-Lese-Speicher, RAMs: Die Daten können beliebig oft gelesen bzw. geschrieben werden. Die
Zugriffszeiten sind für beide Vorgänge nahezu gleich.
Nur-Lese-Speicher, ROMs: Die gespeicherte Information läßt sich beliebig oft lesen, kann aber nur
einmal geschrieben bzw. programmiert werden (Ausnahme EPROM).
Meist-Lese-Speicher, EEPROMs: Bei diesen RMM-Speichern (read-mostly-memory) kann der
Speicherinhalt gelesen und geschrieben werden. Allerdings ist das Schreiben technisch aufwendiger
und benötigt um Größenordnungen längere Zugriffszeiten. Die Anzahl von Umprogrammierungen ist
begrenzt.
3
9. Halbleiter-Speicher
9.2
9.2.1
Festwertspeicher, ROMs
Zur Einteilung von ROMs
Vom logischen Standpunkt aus sind Festwertspeicher Zuordner, die einem Eingangswort (Adresse)
ein Ausgangswort (Daten) zuordnen. Nach der Programmierung ist ein Informationsfluß nur in der
Richtung Lesen möglich, daher die Bezeichnung ROM (read-only-memory, Nur-Lese-Speicher).
{ Die Information eines Festwertspeichers bleibt auch bei Betriebsspannungsausfall erhalten
(nicht- flüchtiger Speicher) und kann beliebig oft ausgelesen werden.
Ein wesentlicher Fortschritt bei der Entwicklung von Halbleiterspeichern war die Einführung von
Festwertspeichern, die durch den Anwender einmal oder mehrfach programmiert werden können
(PROM, EPROM, EEPROM).
{ Beim Programmieren müssen spezifische Strom-/Spannungsgrößen realisiert werden und es ist
ein bestimmter Zeitablauf (Algorithmus) einzuhalten. Beide weichen von den Betriebskenngrößen beim Lesen erheblich ab. Meist werden spezielle Programmiergeräte verwendet,
die Programmierdauer beträgt typisch etwa 1 bit /ms.
ROM
bipolar
Dioden-Matrix
unipolar
Masken-ROM PROM
Masken-ROM EPROM
fusable links
Oxiddicke
FAMOS
AIM
Gateelektrode
SIMOS
NV-RAM EEPROM
MAOS
MNOS
Bild 9.2.1: ROM-Einteilung nach Speicherelementen /1/
Maskenprogrammierte ROMs: Sie erhalten ihren Speicherinhalt bei der Herstellung durch eine
spezielle Maske (Metallisierung). Nach dem Einbau des Speicherchips in das Gehäuse kann dieser
Inhalt nicht mehr verändert werden.
Programmierbare Festwertspeicher (PROMs): PROMs (field progammable ROMs) können sowohl
vom Hersteller als auch vom Anwender einmal programmiert werden.
Wiederprogrammierbare Festwertspeicher (EPROMs, EEPROMs): EPROMs (ultraviolet erasable
programmable ROMs) lassen sich in speziellen Programmiergeräten elektrisch programmieren und
mit intensiver UV-Bestrahlung (5 ... 20 min.) wieder löschen.
{ Dafür muß im Gehäuse ein Quarzglasfenster vorhanden sein. Alle Speicherzellen des Chips
werden gleichzeitig gelöscht (alle Zellen auf L- oder H-Pegel).
4
9. Halbleiter-Speicher
EEPROMs (electrical erasable PROMs): EEPROMs sind elektrisch löschbare PROMs. Sie lassen
sich prinzipiell im Anwendergerät löschen und programmieren. Damit ist grundsätzlich die Brücke
zum RAM hergestellt, allerdings sind zum Programmieren (Schreiben) andere Strom-/Spannungspegel notwendig und die Programmierzeit ist deutlich größer als die Zugriffszeit beim Lesen.
{ Jedes Byte des Speichers kann getrennt gelöscht und eingeschrieben werden. Das Löschen
erfolgt durch elektrische Impulse.
NV-RAMs: Nichtflüchtige Halbleiterspeicher sind auch die sogenannten NV-RAMs (non volatile).
Sie werden ausschließlich in MOS-Technologien realisiert. Der Chip enthält einen statischen RAM
und einen EEPROM. Im Normalbetrieb arbeitet die Schaltung als RAM und kann so gelesen und
beschrieben werden. Beim Abschalten der Betriebsspannung werden die aktuellen Daten aus dem
RAM in den EEPROM "gerettet".
Mit CMOS-RAMs und Pufferbatterie kann ebenfalls ein nichtflüchtiger Speicher realisiert werden.
Eine Zusatzelektronik bewirkt die unterbrechungsfreie Umschaltung auf die Batteriespannung bei
Betriebsspannungsausfall. Gleichzeitig unterdrückt sie störende Einflüsse der Umschaltimpulse und
Einschwingvorgänge. Typisch werden dafür Lithium-Batterien mit UB ≥ 2 V eingesetzt.
{ Der Ruhestrom im "Power-down-Betrieb" beträgt nur ca. 10 nA (1-kBit-CMOS-RAM) und
liegt damit um ca. 6 Zehnerpotenzen unter dem Stromverbrauch im Normalbetrieb. Er ist auch
erheblich geringer als der Strom infolge Selbstentladung der Batterie. Typisch wird ein
Datenerhalt von 10 Jahren für 1 Mbit garantiert.
NV-RAMs werden auch als Hybridmodul (CMOS-RAM und Lithium-Batterie) realisiert, teilweise
pinkompatibel zu EPROMs bzw. RAMs gleicher Speicherkapazität. Schon seit längerer Zeit auf dem
Markt ist z. B. der Baustein NV R8 (8k x 8bit, 28 polig) von Greenwich Instruments Ltd /1/.
9.2.2
Schaltungstechnische Realisierung der Speichermatrix
Die Prinzipstruktur eines ROMs besteht aus Adreßdecoder, Speichermatrix und Ausgangspuffer.
Adressen
N
1
2
4
8
:
:
DC
1
2
3
:
:
Speicher N = 2n
Matrix
Daten
Ausgangs puffer
M
M x N Zellen
OE
Bild 9.2.2: Prinzipstruktur eines ROMs
Den schematischen Aufbau der ROM-Speichermatrix zeigt Bild 9.2.3 am Beispiel einer 4 x 4 bitDioden-Matrix. Die schaltungstechnische Realisierung von ODER- bzw. UND-Verknüpfungen mit
Dioden sind bereits aus Abschnitt 3 bekannt.
5
9. Halbleiter-Speicher
Uo
U o > UH
bei UND:
Ro
w
w0
B
w1
U o < UL
w2
bei ODER:
w3
w
B0
B1
B2
B3
B
- programmierbar
- mit 1 programmiert
Bild 9.2.3: Aufbau einer ROM-Speichermatrix mit Dioden
Die LSI-Bipolartechnik nutzt folgende Möglichkeiten zur Programmierung (Bild 9.2.4):
Maskenprogrammierte ROMs
Nur die benötigten Dioden der vollständig realisierten Diodenmatrix (Koppelfeld) werden in den
Kreuzungspunkten angeschlossen (Aluminium-Leitbahnmasken, Kontaktlochmasken).
PROMs mit Durchbrennzweig
In Reihe zu den Dioden liegen sogenannte fusable links; das sind ausbrennbare Leitbahnen aus NiCr,
NiBr oder poly-Si. Zum Programmieren werden Stromimpulse von ca. 20 mA benötigt.
PROMs mit kurzschließbaren Dioden
Mit hohen Spannungen wird die offene BE-Diode eines Transistors in den zweiten Durchbruch
gesteuert und somit dauerhaft leitend (AIM, Lawineninduktion, avalanche-induced-migration).
Wortleitung
W
W
W
B
B
+ UCC
P
fusable link
Bitleitung
fusable-link-Prorammierung
B
AIM - Programmierung
Bild 9.2.4: Programmiermöglichkeiten bei bipolaren ROMs
In der MOS-Technik wird für jeden Platz des Koppelfeldes ein MOSFET als Schalttransistor
vorgesehen. Zur Programmierung gibt es folgende Möglichkeiten (Bild 9.2.5):
Maskenprogrammierte ROMs
1) Mit einer Ätzmaske wird die Schichtdicke des Gateoxids und damit die Schwellspannung UGS0
programmiert; Dünnoxid bei aktiven Transistoren mit UGS0 < 1 V, sonst Dickoxid mit UGS0 > 5 V.
2) Die Gateelektrode wird nur für aktive Transistoren realisiert (Metall-Gate-Technik).
6
9. Halbleiter-Speicher
PROMs
PROMs sind bei MOS-Technik nicht üblich.
EPROMs
Bei EPROMs wird in den Koppelpunkten eine Reihenschaltung aktiver Schalttransistoren realisiert.
Diese FAMOS-FET (floating-gate avalanche injection-MOS-FET) sind elektrisch programmierbar
und durch UV-Licht löschbar. Bei gelöschtem Gate ist der Speicher-FET T2 gesperrt.
Beim Programmieren wird mit hohen Spannungen UDB > UDB Br ein Lawinendurchbruch der Strecke
Drain-Bulk erreicht. Sogenannte heiße Elektronen durchtunneln dabei die dünne Gateisolation und
laden das Gate auf, der FET wird selbstleitend. Das Gate hält die negative Ladung 10 ... 100 Jahre.
Bei n-Kanal-FET wird wegen des besseren Wirkungsgrades für das Tunneln die Programmierung
nach dem SIMOS-Prinzip vorgenommen (stacked-stage injection MOS, Stapelgate). Dazu wird ein
zusätzliches Steuer-Gate GS über dem isolierten Gate des Speichertransistors angeordnet und zum
Programmieren und Lesen genutzt. Löschen erfolgt wieder mit UV-Licht.
W
UDD
UDD
UDD
T2
T2
T2
T1
T1
T1
B
Dünn-/Dickoxid
W
B
W
Metall-Gate-Technik
B
T2 - FAMOS - FET
U
GS
DD
T2
T1
W
B
T2 - MNOS - FET
Bild 9.2.5: Programmiermöglichkeiten bei MOS-ROMs
EEPROMs
Die Speicherelemente der Matrix bestehen aus der Reihenschaltung eines aktiven Schalttransistors
und eines Speichertransistors T2 . Dafür werden MNOS- und MAOS-FET eingesetzt. Diese besitzen
einen geschichteten Gateisolator (Si-Nitrid bzw. Aluminium-Oxid und Si-Oxid). An der Grenzfläche zwischen beiden Dielektrika entstehen Haftstellen, durch die Elektronen getunnelt werden.
Das Programmieren benötigt mit typisch 100 µs/Byte mehr als das (10 ... 100)-fache der Lesezeit.
Bild 9.2.6 zeigt als Beispiel eine 2 x 2-bit-ROM-Matrix (NOR-Spalten, Metall-Gate-Technik).
UDD
W0
1
0
0
1
W1
B0
Bild 9.2.6: MOS-ROM-Speichermatrix
B1
7
9. Halbleiter-Speicher
9.3
Schreib-Lese-Speicher (RWM, RAM)
Ein Schreib-Lese-Speicher (RWM, read-write-memory) ist ein Speicher mit wahlfreiem Zugriff zu
jedem Speicherplatz (random access memory, RAM). Die Zugriffszeiten für Lesen und Schreiben
liegen bei RAMs in der gleichen Größenordnung. Die Information kann beliebig oft eingeschrieben
und ausgelesen werden. Halbleiter-RAMs sind flüchtige Speicher (volatile), da sie selbst bei kurzzeitigem Ausfall der Betriebsspannung ihren Inhalt verlieren. Dieser Nachteil kann mit einer
zusätzlichen "Pufferbatterie" und Umschaltelektronik vermieden werden (vgl. NV-RAMs).
Aus technologischen Gründen wird wie bei den Festwertspeichern eine quadratische Matrix der
Speicherzellen realisiert (Bild 9.3.1). In jedem Kreuzungspunkt der Speichermatrix befindet sich
eine Speicherzelle mit zugehöriger Ansteuerlogik. Zur Anwahl einer bestimmten Speicherzelle wird
die Adresse A aufgeteilt und von einem Spaltendecoder und einem Zeilendecoder dekodiert.
{ Eine zentrale Steuerlogik aktiviert den Speicherbaustein über CS (chip select) und legt die
Betriebsart Lesen / Schreiben mit R/ W (read/write) fest.
CS
DO
Schreib-Lese-Speicher
DI
X
R/W
A DC 0
B
1
C
2
3
4
5
6
7
Zeilendecoder
Matrix
01 2 3 4 5 6 7
A B C
DC Spaltendecoder
Y
Bild 9.3.1: Adressierung und Betriebsartenauswahl eines RAMs (64 x 1 bit)
9.3.1 Statische RAMs
9.3.1.1 Aufbau und Funktionsweise
Die Grundelemente von Schreib-Lese-Speichern (RAMs) sind Flipflops mit zusätzlichen Gatterfunktionen zur Ankopplung der Adreß-, Daten- und Steuerleitungen. Wenn die Betriebsspannung nicht
abgeschaltet wird bzw. nicht ausfällt, bleibt der Inhalt jeder Speicherzelle erhalten, bis er durch
einen Schreibvorgang geändert wird.
{ Man bezeichnet diese Elemente deshalb auch als statische Speicher- bzw. RAM-Zellen. Im
Gegensatz dazu muß bei dynamischen Speichern der Inhalt regelmäßig aufgefrischt werden,
damit er nicht verloren geht.
Statische RAM-Zellen für bitweise Adressierung über getrennte Adreßleitungen zeigt Bild 9.3.2.
Eine Informationsübertragung auf den angegebenen Bit- bzw. Datenleitungen ist nur möglich, wenn
die Speicherzellen über die Adreß- bzw. Wortleitungen aktiviert sind.
8
9. Halbleiter-Speicher
UDD (5 V)
Bitleitung B
UDD (5 V)
Bitleitung B
T6
T2
T1
T4
p
T6
T2
p
T5
T4
T3
T5
T3
n
T1
n
GND
GND
Wortleitung
H - Auswahl
L - Standby
Bitleitung B
6-Transistor-nMOS-Speicherzelle
Bitleitung B
CMOS-Speicherzelle
Bild 9.3.2: Statische nMOS- und CMOS-RAM-Zellen
Die Funktionsweise einer RAM-Zelle unter Verwendung eines D-Flipflops als Speicherelement kann
mit der logischen Ersatzschaltung nach Bild 9.3.3 erklärt werden.
Zum Lesen muß die Speicherzelle über die Adresse angewählt sein. Gatter G2 besitzt dazu einen
OC-Ausgang, der für xi = yi = H leitend wird. Schreiben ist nur bei we = H und xi = yi = H möglich
(Gatter G1, Takt für Flipflop). Bei anliegender Adresse wird mit dem L/H-Wechsel an we die
Information d IN über Ausgang Q des D-Flipflops und Gatter G2 an den Datenausgang gelegt. Die
Ausgänge dOUT aller Zellen einer bitorganisierten Speichermatrix (bzw. aller Zellen einer Spalte bei
wortorganisierter Matrix) sind über eine interne wired-AND-Verknüpfung verbunden und über ein
Tristate-Gatter der Steuerelektronik als Datenausgang DOUT verfügbar.
Beim Schreibvorgang ist wegen R/ W = L und EN = L der Datenausgang DOUT hochohmig. Das bietet
die Möglichkeit, den Dateneingang DIN und den Datenausgang DOUT zu verbinden (weniger
Anschlüsse, Anschluß an bidirektionales Bussystem). Für CS = L wird der Datenausgang ebenfalls
hochohmig geschaltet. Gleichzeitig wird we = L und damit unbeabsichtigtes Schreiben verhindert.
d IN
DIN
we
d OUT
D
OUT
1
xi
+
yi
&
CS
R/W
&
≥1
&
EN
EN
&
we
d IN
G1
&
Q
C1
1D
G2
Bild 9.3.3: Logische Ersatzschaltungen für Steuerlogik und Speicherzelle eines RAMs
d OUT
9. Halbleiter-Speicher
9
9.3.1.2 Dynamische Kenngrößen statischer RAMs
Die einwandfreie Funktion eines Speichers erfordert ein festes zeitliches Regime der verschiedenen
Signale beim Schreiben und Lesen (Bild 9.3.4).
A
Adress valid
CS
R/W
Data valid
D
tAS
tH
t DW
t WP
"Schreiben"
t AS - Adress setup time;
t WP - write pulse width
t DW - Data valid to end of write time;
A
t H - hold time
Adress valid
CS
Data valid
D
t AA
"Lesen"
t
AA
- Adress access time
Bild 9.3.4: Zeitbedingungen für Schreiben und Lesen eines statischen RAMs
Schreiben
Der Schreibbefehl R/ W = L darf erst bei gültiger Adresse angelegt werden (tAS nach CS). Die Dauer
des Schreibimpulses darf einen minimalen Wert tWP nicht unterschreiten. Die Daten werden am Ende
des Schreibimpulses eingeschrieben. Sie müssen eine Mindestzeit tDW vorher gültig sein.
{ Bei vielen Speicherschaltkreisen müssen die Daten und/oder Adressen auch noch eine Zeit tH
nach dem Ende des Schreibimpulses stabil bleiben. Damit ergibt sich für die Zeitdauer des
Schreibvorganges: tW = tAS + tWP + tH (Zykluszeit, write cycle time).
Lesen
Nach Anlegen der Adresse und aktivem CS-Signal vergeht die Zeit tAA , ehe die Daten am Ausgang
gültig sind (Einschwingen).
10
9. Halbleiter-Speicher
9.3.2
Dynamische RAMs
Um einen hohen Integrationsgrad der Speicherzellen zu erreichen, werden für dynamische RAMs
anstelle der bei statischen RAMs typischen Mehr-Transistorzellen einfachere Strukturen verwendet.
Dabei wird sogar auf das Flipflop verzichtet. Als Speicherelement dient die parasitäre Gate-SourceKapazität CGS eines Feldeffekttransistors (Bild 9.3.5).
{ Wegen der geringen Größe dieser Kapazität CGS = (0,1 ... 1) pF baut auch ein kleiner Leckstrom die Gate-Ladung in relativ kurzer Zeit ab und muß in Zeitabständen von ca. (2 ... 8) ms
aufgefrischt werden (Refresh).
{ Geeignete Steuerschaltungen dafür sind als Dynamic-RAM-Controller (Bild 9.3.6) verfügbar
bzw. in den RAM-Schaltkreisen enthalten.
Der ordnungsgemäße Betrieb dynamischer RAMs erfordert außer der Refresh-Logik noch weitere
Hilfsschaltungen. Um die Anzahl von Anschlüssen für die Adreßleitungen am Baustein klein zu
halten, wird die Adresse in zwei Schritten in entsprechende Latches geladen (Multiplexbetrieb).
Diese Aufgabe übernehmen typisch ebenfalls die o.g. dynamischen RAM-Controller. Nur so gelingt
es z.B., einen 1 M x 1 bit-DRAM mit einem 18-poligen Gehäuse zu realisieren.
{ Im Vergleich zu statischen RAMs erreichen dynamische RAMs bei gleicher Chipfläche,
Stromaufnahme und Preis eine typisch mehr als vierfache Speicherkapazität.
Zeilenauswahl
Bitleitung
T3
T1
T3
T2
T4
C1
T1
C2
SchreibLeitung
Daten-H Leitung
T2
C
LeseLeitung
Daten-LLeitung
Vier-Transistor-Zelle
Drei-Transistor-Zelle
Wortleitung
Refresh
Datenleitung
T1
T2*
C1
C2
Speicher-C
Senseverstärker
T3*
Leseverstärker
C2 >> C1
Ein-Transistor-Zelle
Spaltenauswahl
Bild 9.3.5: Prinzipschaltungen für dynamische RAM-Zellen (DRAM)
Ausgang
9. Halbleiter-Speicher
a 0... a 9
11
Row Adress-Latch
a10... a 19
Column Adress-Latch
MUX
Refresh Zähler
MA
Dynamic - RAM Controller
AS
Arbiter
Ablauf Steuerung
RAS
Refresh Zeitbasis
CAS
CLK
WAIT
RAS
Row 10
MA
Row Decoder
Matrix
Adress Latch
DRAM
Column Adress - Latch
CAS
Column Decoder
RAS
- Row-Adress-Strobe;
CAS
- Column-Adress-Strobe
MA 10 - Memory Adress (multiplex, 18-Pin-Gehäuse)
AS
RAS
CAS
MA
Row
Column
Bild 9.3.6: Adreßdecodierung in einem 1 M x 1-bit-DRAM, zeitlicher Ablauf der Adreßeingabe
9. Halbleiter-Speicher
12
9.4
Speicher mit seriellem Zugriff
Speicher mit seriellem Zugriff werden vor allem in Rechnern als Zwischenspeicher verwendet. Der
Zugriff auf eine bestimmte Speicherzelle ist nicht wahlfrei, sondern von der Lage der Speicherzelle
im Speicher abhängig. Damit ist auch die mittlere Zugriffszeit größer als bei Parallelregistern oder
Matrix-Speichern.
Schieberegister
Schaltungsstruktur und Wirkungsweise von Schieberegistern sind in Abschnitt 5.1.3 beschrieben.
Wird ein Schieberegister mit der Taktfrequenz fT betrieben, so erscheint die Eingangsinformation erst
nach einer Verzögerungszeit T = n − 1 am Ausgang. Mit dem n-ten Taktimpuls wird das am weitesten
fT
rechts stehende Bit aus dem Register herausgeschoben und geht verloren.
{ Soll die Information erhalten bleiben, so kann das Register zu einem Ring geschlossen werden
(Rückkopplung Ausgang-Eingang).
{ Beim Betrieb dieser Anordnung als Ringzähler bzw. Umlaufspeicher läuft die gespeicherte
Information unbegrenzt im Speicher um, der Dateneingang ist vom Speicher abgetrennt.
{ Zur Dateneingabe wird die Rückführung aufgetrennt.
Eine Kaskade von k Umlaufspeichern mit je n Speicherzellen kann als Speicher mit seriellem Zugriff
für k-Bit breite Worte eingesetzt werden. Solche Speicher sind als integrierte Schaltkreise verfügbar.
FIFO-Speicher
FIFO-Speicher (First-In-First-Out) werden vor allem als Pufferspeicher bei der Datenübertragung
zwischen asynchronen Systemen eingesetzt. Wie bei Schieberegistern wird das zuerst eingelesene Bit
bzw. Wort auch wieder zuerst ausgelesen.
{ Im Unterschied zum Schieberegister erfolgen das Einschreiben und das Auslesen asynchron
(Silo-Speicher). Eine Steuerlogik erkennt, welche Registerplätze belegt sind und erzeugt die
erforderliche Anzahl von Schiebebefehlen, damit die eingeschriebenen Datenworte immer auf
dem letzten freien Platz vor dem Ausgang abgelegt werden. Außerdem erzeugt die Logik die
Steuersignale Eingabe frei (Input Ready) und Ausgabe bereit (Output Ready).
Angebotene FIFO-Speicherschaltkreise haben nur eine relativ kleine Speicherkapazität. Wesentlich
größere Speicherkapazitäten werden durch Einsatz von RAMs erreicht. Beim Einsatz spezieller
FIFO-RAM-Controller kann die Datenspeicherung auch mit unabhängigem Schreib-Lese-Zugriff
erfolgen.
LIFO-Speicher
LIFO-Speicher (Last-In-First-Out) werden vor allem als Adreßspeicher für Unterprogramme und als
Zwischenspeicher von Daten eingesetzt. Sie werden auch als Stapelspeicher (Stack) bezeichnet.
{ Beim Schreiben werden die Daten auf das zuletzt gespeicherte Wort am Stapelgrund abgelegt
(Push-Vorgang) und beim Lesen von dort zum Datenausgang angehoben (Pull).
{ Das Lesen von Daten ist nur in der umgekehrten Reihenfolge zum Schreiben möglich.
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
10.
10.1
1
Anwendungsspezifische Integrierte Bausteine (ASICs)
Überblick
Der erreichte Stand der Halbleitertechnik ermöglicht heute die Realisierung von kompletten digitalen
Systemen auf einem Chip. Die sogenannten ASICs (application specific integrated circuit) erreichen
einen Integrationsgrad von einigen 10 000 Gatterfunktionen.
Andererseits erhöhen sich die Entwurfskosten und -zeiten mit zunehmender Komplexität der Systeme
sehr schnell, so daß der Entwurfsprozeß von Hand nicht mehr beherrschbar ist. Ein wesentlicher
Fortschritt wurde durch die Bereitstellung der sogenannten Halbkundenschaltkreise erreicht, die aus
Anwendersicht z. Z. wohl wichtigste Gruppe der ASICs. Ihr Entwurf erfolgt auf der Basis der vom
Halbleiterhersteller vorgefertigten und getesteten Grundschaltungen und mit Hilfe leistungsfähiger
Entwurfswerkzeuge.
Der Vorteil dieser anwenderprogrammierbaren ASICs besteht darin, daß der Anwender seinen
Schaltkreis entwerfen kann, ohne selbst über umfangreiche halbleitertechnologische Kenntnisse zu
verfügen. Man spricht von programmierbaren Schaltungen (PLDs - programmable logic devices).
Der Entwurf mit den vom Halbleiterhersteller vollständig getesteten Grundstrukturen führt in den
meisten Fällen schnell zu zuverlässigen Lösungen, deren Realisierung im Falle von PLDs bereits bei
kleinsten Stückzahlen ökonomisch ist.
Die verschiedenen Varianten der angebotenen Schaltkreise (PLD, EPLD, LCA) unterscheiden sich in
ihrer inneren Struktur, vor allem aber hinsichtlich der verwendeten programmierbaren Elemente zur
Strukturfestlegung (fusable links, PLICE, EPROM-Zellen, EEPROM-Zellen, sRAM-Zellen).
ASIC
(Application Specific IC )
Vollkunden - IS
Halbkunden-IS
Standardzellen
Masken - programmierbar
kompakte
Array
(Sea-of-Gates)
Macro-Zellen
Anwender - programmierbar
klassische Gate-Array
strukturierte
Array
Zellen-Array
PLD
PLE
PLA
PAL
EPLD
FPGA
GAL
LCA
ROM
EEPLD
Vollständig vorgefertigt,
Vorgefertigte Grundstrukturen,
anwenderspezifisch ist das
anwenderspezifisch ist das
Herstellen von Verbindungen
Auftrennen von Verbindungen
Bild 10.1: Überblick über anwendungsspezifische integrierte Schaltkreise
2
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
10.2 Programmierbare logische Schaltungen
10.2.1 Prinzip
Grundsätzlich kann man jede kombinatorische Logikfunktion mit einer dreistufigen UND/ODERStruktur realisieren. Die erste Stufe enthält Eingangstreiber und Negatoren. Die zweite Stufe besteht
im wesentlichen aus einer UND-Matrix zur Bildung der Elementarkonjunktionen bzw. Produktterme
der Eingangsvariablen. Die dritte Stufe wird als ODER-Matrix zur Auswahl dieser Produktterme für
die geforderten Ausgangsvariablen realisiert. Zur Darstellung der komplexen Verknüpfungen wird
eine vereinfachte Symbolik gewählt (Bild 10.2).
{ Die Eingangsvariablen xi und ihre Negationen bilden mit den kreuzenden Eingangsleitungen
der UND-Gatter die UND-Matrix. Die notwendigen Produktterme Pj (Primimplikanden bzw.
Fundamentalkonjunktionen) werden durch Programmieren erzeugt.
{ In der ODER-Matrix werden die Verbindungen von den Ausgängen der UND-Gatter zu den
Eingängen der ODER-Gatter hergestellt. Jeder Ausgangsvariablen Yk wird dabei genau ein
ODER-Gatter mit entsprechender Anzahl von Eingängen zugeordnet.
X
P
UND
ODER
Y
X
x
1
x0
x
2
x2
x
4
x3
x4
&
Eingangsvariable
"Adressen"
A B C
ABC
P1
&
P2
&
P3
UND
≥1
≥1
Y0
Y1
&
ABC
&
≥ 1 A+B+C
≥ 1 A+B+C
ODER
ABC
vereinfachte Symbolik
Bild 10.2: Prinzipstruktur einer PLD, Symbolik zur vereinfachten Darstellung
10.2.2 Varianten von PLD-Bausteinen
Abhängig von der Programmierbarkeit der UND- und/oder ODER-Matrix unterscheidet man
UND-Matrix
ODER-Matrix
PLE
Programmable Logic Device with EPROM
fest verdrahtet
programmierbar
PAL
Programmable Array Logic
programmierbar
fest verdrahtet
PLA
Programmable Logic Array
programmierbar
programmierbar
PML
Programmable Macro Logic
mehrstufige Anordnung von Grundgattern
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
3
x 0x1x 2
x0x1
x0
1
UND - Matrix
x1
1
PLA
x2
1
&
&
&
&
&
&
&
&
≥1
ODERMatrix
y0
≥1
y1
x 0x2
x2
x0
1
UND - Matrix
x1
1
PAL
x2
1
&
&
&
&
&
&
&
&
≥1
ODERMatrix
y0
≥1
x0
1
x1
1
x2
1
y1
UND - Matrix
PROM
(PLE)
&
&
&
&
&
&
&
&
≥1
ODERMatrix
≥1
x - programmierte Verbindung
- feste Verbindung
Bild 10.3: Realisierung logischer Funktionen mit PLA, PAL und PROM
y0
y1
4
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
Auch ein PROM kann als PLD aufgefaßt werden, wenn man den Adressendecoder als UND-Matrix
interpretiert (vgl. Bild 10.3): Bei jeder angelegten Adresse A wird bei einem PROM mit n Adreßleitungen genau eine von 2n UND-Verknüpfungen logisch wahr. In der ODER-Matrix werden die
Verbindungen für genau die Produktterme programmiert, die in der Funktionstabelle mit yi = 1 notiert
sind. Ein PROM enthält somit die Abbildung der Funktionstabelle, man nennt ihn deshalb auch
Tabellenspeicher. Demgegenüber werden PALs und PLAs als Funktionsspeicher bezeichnet. Die
Anzahl von UND-Gliedern ist typisch wesentlich kleiner ist als die bei n Eingangsvariablen maximal
mögliche Zahl von 2n Produkttermen.
Damit kann also nicht jede Schaltfunktion bzw. Funktionstabelle mit n Variablen realisiert werden,
sondern nur solche, die sich entsprechend vereinfachen lassen. Bild 10.3 zeigt beispielhaft die
Realisierung einer logischen Funktion nach den drei Varianten. Es läßt auch die höhere Flexibilität
von PLAs gegenüber PALs zu erkennen:
{ Produktterme lassen sich bei PLAs mehrfach ausnutzen. Das führt u.a. auf eine geringere
Anzahl der zu realisierenden Verbindungen in UND- und ODER-Matrix.
{ Am einfachsten lassen sich PALs programmieren, deshalb werden sie häufig eingesetzt.
{ PLAs sind im Prinzip flexibler, dafür ist ihre Programmierung wesentlich komplizierter.
PLAs sind gegenüber PROMs vorteilhaft einsetzbar für solche Anwendungen, bei denen nur relativ
wenige Worte gespeichert, diese jedoch mit langen Adressen (viele Eingangsvariable) aufgerufen
werden müssen. Anders formuliert heißt das, daß bei PROM der durch die Anzahl der Eingänge
bestimmte Adreßraum nur zu einem kleinen Teil genutzt wird.
Beispiel:
Ein PLA-Schaltkreis mit N = 14 Eingängen, M = 8 Ausgängen kann P = 96 Worte bzw. Produktterme speichern, seine Speicherkapazität K beträgt damit also nur K = M . P = 768 Bit.
Ein PROM mit 14 Adreßleitungen (Eingänge) und 8 Bit Ausgangswort könnte K = 27 kBit speichern,
wäre also für eine vergleichbare Aufgabe wie der PLA-Schaltkreis schlecht ausgenutzt.
Progammiertechniken
Die Programmierung erfolgt grundsätzlich nach den gleichen Prinzipien wie bei den EPROMs
(fusable links, floating gates). Zur anwenderspezifischen Programmierung werden eine Entwurfssoftware sowie ein spezielles Programmiergerät benötigt. Nach Eingabe des logischen Verhaltens
der Ein- und Ausgangspins (Zuweisungen, Boolesche Gleichungen, Funktionstabellen) erfolgt durch
diese Software eine Umsetzung in die programmierbare Form des gewählten Schaltkreises. Folgende
Techniken und Technologien zur Programmierung von PLDs und EPLDs sind üblich, dabei werden
die Kreuzungspunkte der Matrizen als Koppelpunkte aufgefaßt:
fusable links: die schmelzbare Verbindung (typisch TiWo, NiCr) zwischen den Koppelpunkten
wird durch einen relativ hohen Stromstoß irreversibel zerstört,
PLICE:
der hochohmige Koppelpunkt ( > 100 kΩ) wird nach der Programmierung elektrisch
niederohmig ( < 1 kΩ); PLICE = Programmable-Low-Impedance-Element,
EPROM:
FAMOS-Transistoren werden als Koppelpunkt niederohmig programmiert und
können mit UV-Licht wieder gelöscht werden,
EEPROM: elektrisch programmierbare FLOTOX-Transistoren als Koppelpunkt, separate
Ein-/Ausschaltung der einzelnen Koppelpunkte möglich,
SRAM:
Schalttransistor im Koppelpunkt wird von SRAM-Zelle angesteuert, SRAM ist
meist Bestandteil des PLD-Bausteins.
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
5
Bild 10.4 zeigt ein programmierbares UND-Gatter und einen Inverter für PALs auf Basis der
Fusable-Link-Technik (vgl. auch Bild 10.5, Typ P).
X1
&
fusable link
fusable link
X2
X1
=1
X2
Y
P
1
X2 = 0: Y = X 1
X2 = 1: Y = X 1
Bild 10.4: Programmierbares UND-Gatter und Inverter für PALs
PLD - Bausteintypen
Bemerkungen
PROM
maskenprogrammierter ROM
EPROM
UV-löschbarer PROM
EEPROM
elektrisch löschbarer PROM
PAL
(Programmable Array Logic)
PAL ist ein eingetragenes Warenzeichen der Firma MMI
(Monolithics Memories Inc., USA)
HAL
(Hardware Array Logic)
PAL mit vom Hersteller kundenspezifisch verdrahteter UND-Matrix
IFL
(Integrated Fuse Logic)
Familienbezeichnung für die PLDs der Firma Valvo
GAL
(Generic Array Logic)
elektrisch löschbares PAL mit EEPROM-Zellen als Schalter;
GAL ist ein Warenzeichen der Firma Lattice Semiconductor
EPLD
(Erasable programmable logic devices)
PLD mit programmierbaren und durch UV-Licht löschbaren
EPROM-Zellen als Schalter
LCA
(Logic Cell Array)
programmierbare E/A- und Logikblöcke; sRAM-Zellen mit
Schalttransistor zur anwenderspezifischen Strukturfestlegung über
programmierbare Verbindungsleitungen
Tafel 10.1: Übersicht über PLD-Bausteine
Die Integrationstechnik gestattet die Herstellung komplexer PLDs. Zur Absicherung eines möglichst
breiten Einsatzes werden außer den Grundstrukturen (UND-/ODER-Matrix) typisch noch zusätzliche
Funktionen integriert (Tristate-Ausgänge, Flipflops, programmierbare Rückführungen).
{ Damit können von anwenderprogrammierbarer kombinatorischer Logik bis hin zu komplexen
anwenderspezifischen Digitalfunktionen unterschiedlicher Art nach Maß konfiguriert und
programmiert werden.
Deshalb wird manchmal zwischen kombinatorischen PLDs und Steuerwerke-PLDs unterschieden.
Verschiedene Typen von Ausgangsschaltungen von PALs sind in Bild 10.5 und Bild 10.6 gegeben.
6
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
&
:
&
:
:
:
&
≥1
:
Y
&
H - High
&
:
&
:
:
:
:
&
:
:
:
&
≥1
:
&
:
:
:
: ≥1
:
:
Y
:
&
Y
=1
Y
P - Programmable
≥1
≥1
&
Y0
&
=1
&
Y
L - Low
C - Complement
&
≥1
:
:
:
:
:
Y
&
:
:
≥1
&
≥1
Y1
S - Sharing
X - EXOR
&
EN
&
:
:
&
:
:
Y
≥1
1
&
:
:
1≤
B - Bidirektional
Bild 10.5: Typen von Ausgangsschaltungen bei PALs
&
C
: ≥1
:
1≤
R - Register
1D
Q
Y
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
Clock
OE
&
&
≥1
:
:
:
:
7
0
&
V- Variabel
1
1
D Q
2
C
Y
Y
3
a
b
&
MUX
A
B
MUX 0
1
Y
A
b
a
Typ
0
0
1
1
0
1
0
1
H
L
R
R
Ausgang
Funktion
Funktion, negiert
Register
Register
Rückkopplung
Ausgang
Ausgang
Register
Register
Bild 10.6: Ausgangsschaltung von PALs, Makrozelle (Typ V - variabel )
10.2.3 Programmier- und löschbare PLDs
Ähnlich wie bei den Festwertspeichern (ROM __> EPROM __> EEPROM) verlief die Entwicklung
auch bei den PLDs zu durch den Anwender ggf. mehrfach programmierbaren Lösungen. Heute gibt es
bereits EPLDs und EEPLDs, gelegentlich werden auch die sogenannten LCAs dazu gerechnet.
EPLDs: PLDs mit Durchbrennzweigen (fusable links) sind nur einmal programmierbar; sie können
somit auch bei der Herstellung nicht vollständig getestet werden. Dagegen verwenden EPLDs
(erasable programmable logic devices) programmierbare und UV- löschbare EPROM-Zellen als
Schalter. Die zu implementierende Logik muß für die EPLDs in der Form SOP (Sum Of Products,
Summe von Produkten) vorliegen.
EEPLDs: Seit 1985 gibt es elektrisch löschbare EPLDs, sie können ca. 100mal gelöscht und neu
programmiert werden (z.B. GALs von Lattice Semiconductor). Wie die PALs enthalten die GALs
eine programmierbare UND-Matrix. Das spezifische Funktionsmerkmal von GALs ist eine flexibel
programmierbare Ausgangslogik-Makrozelle, die u.a. ein ODER-Gatter zur Verknüpfung der vom
UND-Feld bereitgestellten Produktterme enthält.
Beispiele:
GAL 16V8
GAL 20V8
GAL 22V10
- 20poliger Schaltkreis (mit 8 programmierbaren Ausgangs-Makrozellen),
- 24poliger Schaltkreis (mit 8 programmierbaren Ausgangs-Makrozellen),
- 28poliger Schaltkreis (mit 10 programmierbaren Ausgangs-Makrozellen).
8
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
10.2.4 Programmierbare Gate Arrays
Zur Realisierung vieler Aufgaben wird relativ wenig Kombinatorik, dafür aber mehr Register- bzw.
Speicherkapazität benötigt. So wird z.B. die mögliche Anzahl von Produkttermen in PLDs oft nicht
ausgenutzt und die Restkapazität des Bausteins geht verloren. Für manche Aufgaben erweist es sich
als günstig, die logische Schaltung aus kleineren Funktionseinheiten zu kaskadieren. Für diese
Vorgehensweise werden dann auch spezielle Verfahren der Logiksynthese notwendig, die sich vom
klassischen Konzept für zweistufige Schaltungen grundsätzlich unterscheiden. Gleichzeitig müssen
die Bausteine für eine Implementierung dieser speziellen Strukturen ausgelegt sein. Bei klassischen
maskenprogrammierbaren Gate Arrays (MPGAs) ist das der Fall.
Maskenprogrammierte Gate Arrays (MPGAs)
Der Entwurf von MPGAs geht bis auf die Transistor-Ebene zurück, d.h. die benötigten logischen
Gatter werden nach Bedarf aus den vom Halbleiterhersteller vorgefertigten Transistoren realisiert.
Das erfordert umfangreiche und solide Kenntnisse sowohl in der Halbleitertechnologie als auch in
der Schaltungstechnik. Die eigentliche Programmierung der MPGAs erfolgt durch den Hersteller
über sogenannte Verdrahtungsmasken. Das Erstellen einer kundenspezifischen Verdrahtungsmaske ist
zeitaufwendig und relativ teuer, so daß MPGAs für kleine Stückzahlen meist unrentabel sind. Ein
Ausweg ist die Möglichkeit, Gate Arrays durch den Anwender programmierbar zu machen. Das
wurde mit der Entwicklung der sogenannten FPGAs (Field Programmable Gate Arrays) erreicht.
Anwenderprogrammierbare Gate Arrays (FPGAs, LCAs)
Die interne Struktur der anwenderprogrammierbaren Gate Arrays (FPGAs) basiert auf logischen
Blöcken (LBs), die meist weniger Eingänge als eine PLD-Makrozelle besitzen. Sie sind dafür aber in
größerer Anzahl vorhanden. Die Verdrahtung der LBs untereinander erfolgt über eine Matrix von
programmierbaren Verbindungsleitungen. An der Peripherie befinden sich die I/O-Zellen, welche die
Verbindung zur Außenwelt des Bausteins herstellen (Bild 10.7).
{ Im Gegensatz zu den PLDs sind die Logikblöcke (LBs) und I/O-Zellen voneinander getrennt.
{ Im Gegensatz zu den MPGAs geht der Entwurf nicht bis auf die Transistor-Ebene zurück; es
werden vorgefertigte und vom Hersteller bereits getestete Grundschaltungen verwendet.
In diese Klasse von anwenderprogrammierbaren Schaltkreisen gehören auch die sogenannten LCAs
(Logic-Cell-Arrays). Sie bestehen aus konfigurierbaren Logikzellen und einer Verdrahtungsmatrix.
Neben den logischen Funktionen lassen sich so auch Signalpfade zwischen allen Funktionsblöcken
über Multiplexer bzw. PLICE-Antifusetechnik programmieren. Die Verdrahtungsstruktur wird im
Gegensatz zu den EPLDs in schnellen sRAM-Zellen abgelegt und läßt sich somit grundsätzlich auch
im laufenden Betrieb beliebig ändern. Beim Einschalten der Betriebsspannung muß das LCA aus
einem externen Speicher (ROM, EPROM) mit dem geforderten Bitmuster geladen werden.
{ Der wesentliche Vorteil von LCAs liegt in dieser In-Circuit-Konfigurierbarkeit, während
klasssische PLDs nur in einem externen Programmiergerät programmiert werden können bzw.
bei EEPLDs zumindest ein gesonderter Programmierzyklus benötigt wird.
Jede spezielle Baustein-Struktur erfordert eine besondere Vorgehensweise bei der Implementierung
der entsprechenden Logik. Dieses Einpassen wird auch "Technology Mapping" genannt. Je nach
Realisierung benötigen die programmierbaren Schaltelemente mehr oder weniger Chipfläche, die
nicht zur Implementierung logischer Gatter genutzt werden kann. Außerdem entstehen zusätzlich
parasitäre Kapazitäten und Widerstände und damit typisch höhere Laufzeiten als bei MPGAs.
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
9
Die Verdrahtung der einzelnen Signale ist bei FPGAs flexibel möglich. Die sogenannten "Vias"Verbindungen zwischen den Leiterbahnen (Tracks) werden mit Hilfe programmgesteuerter Schalttransistoren bzw. mit programmierbaren PLICE-Elementen hergestellt.
Auch Varianten mit programmierbaren Multiplexern werden realisiert. Zur optimalen Ausnutzung der
Gatter und zur Laufzeitminimierung enthalten LCAs oft unterschiedliche Arten von Leitungen:
{ direkte Verbindungen zwischen benachbarten LBs garantieren die kleinsten Verzögerungen,
{ allgemeine Verdrahtungskanäle in Form einer Schaltmatrix mit einer 2-Lagen-Metallisierung
können alle Logik-Blöcke und I/O-Blöcke beliebig miteinander verbinden,
{ lange Leitungen umgehen die Schaltmatrix und erreichen so minimale Verzögerungszeiten für
kritische Signale, z.B. Taktsignale.
Bild 10.7 zeigt schematisch die typische Struktur eines FPGAs. Um den Kern aus Logik-Blöcken
(LB's) sind zusätzlich eine Anzahl von E/A-Modulen (I/O-Blöcke) angeordnet.
I / O - Block
Logik - Block (LB)
I / O - Block
Verdrahtung
(Matrix der Verbindungsleitungen)
Bild 10.7: Allgemeine Struktur eines FPGA
Die Laufzeit eines Signals ist sowohl von der Länge der Leitung als auch von der Anzahl der
Verbindungsstellen (kapazitive Last) abhängig. Oft kann erst am fertigen Entwurf überprüft werden,
ob die implementierte Schaltung mit der gewählten Signalführung die geforderten Zeit- bedingungen
erfüllt (Place&Route-Problem).
Trotz der geringeren Gatterdichte und höheren Kosten im Vergleich zu den festprogrammierten
Antifuse-Chips und PLDs werden FPGA-Bausteine bzw. LCAs auf sRAM-Basis mit steigender
Tendenz zur Realisierung kundenspezifischer Lösungen eingesetzt. Die konkrete logische Funktion
der Module ist meist konfigurierbar, d.h., sie wird erst durch die Programmierung festgelegt, z.B.
UND, ODER, Multiplexer, Flipflop usw.
{ Diese Aufgabe der Funktionsfestlegung wird durch Entwurfssysteme unterstützt, es stehen
Hardware- und Softwaremakros zur Verfügung.
10
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
10.3.
Pinout und Gehäuseformen von PLDs/FPGAs
Von den Herstellern werden gleiche Schaltungen in verschiedenen Gehäusen mit unterschiedlicher
Pinanzahl bzw. auch unterschiedliche Schaltungen (Chips) in gleichen Gehäusen angeboten. Damit ist
im ersten Fall u.a. eine Anpassung an den Platzbedarf bzw. an die Herstellungstechnologie der
Leiterplatten möglich. Der zweite Fall ermöglicht einfache Änderungen der Schaltungsfunktion bei
gleicher Topologie der Leiterkarte.
{ Der interne Chip hat dabei mehr oder weniger Anschlüsse (Pads), als Pins am Gehäuse zur
Verfügung stehen. Tafel 10.2 zeigt das am Beispiel der LCA-Familie XC 3000 von XILINX.
Anzahl von Pins am Gehäuse
Schaltung
Pads
44
68
84
100
132
164
175
XC 3020
74
-
6 unused
10 n.c.
26 n.c.
-
-
-
XC 3030
98
54 unused
30 unused
14 unused
2 n.c.
-
-
-
XC 3042
118
-
-
34 unused
18 unused
14 n.c.
-
-
XC 3064
142
-
-
58 unused
-
10 unused
-
-
XC 3090
166
-
-
82 unused
-
-
2 unused
9 n.c.
Tafel 10.2: Zur Anzahl von Pads und Pins bei PLDs (Quelle: XILINX)
Äquivalente Schaltkreise werden von unterschiedlichen Herstellern angeboten. Die Bezeichnung auf
dem Schaltkreis (Ordering Information) ist herstellerspezifisch kodiert und enthält bereits wichtige
Informationen für den Anwender (Bild 10.8).
Familienbezeichnung (Technologie)
Anzahl von Array-Eingängen
Ausgangstyp (V - Variabel)
Anzahl von Ausgängen/Registern
Geschwindigkeit (t pdin ns)
Leistungsversion (L = Low Power)
Gehäusetyp
Temperaturbereich
GAL 22 V 10 - 15 L N C
National Semiconductor
Familienbezeichnungen :
(bei National Semiconductor)
PAL
- Programmable Array Logic (TTL)
GAL
- Generic Array Logic (E2CMOS)
PAL 10 - 10 kH ECL PAL
PAL 100 - 100 k ECL PAL
PL
- Factory Programmed PAL
NL
- National Masked Logic
Bild 10.8: Zur Bezeichnung von PLD-/FPGA-Bausteinen
Schaltungstyp
Taktrate
Gehäusetyp
Anzahl von Pins
Temperaturbereich
XC3020-70 PC 68 C
XILINX
Temperaturbereiche:
C - comercial ( 0°C bis +70°C),
I - industrial (- 40°C bis +85°C),
M - military
(- 55°C bis +125°C).
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
Bezeichnung
allgemein
DIP
Leaded Chip Carriers
Quad Flat Pack
Abkürzung
Plastic
Ceramic
DIP
LCC
QFP
PDIP
PLCC
PQFP
Thin Quad Flat Pack
Very Thin Quad Flat Pack
TQFP
VQFP
TQFP
VQFP
Pin Grid Array
Chip Carrier
Ball Grid Array
PGA
CC
BGA
PPGA
PCC
11
Anzahl von Pins
CDIP
CQFP
CPGA
20
44
100
24
68
164
28
84
208
100
144
176
100
84
144
1 mm hoch
175
225
Tafel 10.3: Gehäusetypen bei PLDs/FPGAs
C, I
1
24
U CC
I
2
23
I/O
I
3
22
I/O
I
4
21
I/O
24-PINI
5
DIP
20
I/O
19
I/O
I
6
I
7
18
I/O
I
8
17
I/O
I
9
16
24-PINDIP
I/O
I
10
15
I/O
I
11
14
I/O
GND 12
13
I
3
2
1
NC 24
4
3
2
1
23 22
28 27 26
4
5
25
21
5
6
24
20
6
7
23
19
NC
8
22
NC
28-PIN-PLCC
7
9
21
18
8
10
20
17
9
11
19
16
12 13
10
14 15
16 17 18
11 12 NC 13 14
15
Index-Pin
84-Pin-PGA
A
B
C
D
E
F
G
H
J
K
L
Stand-off-Pin
132-Pin-PPGA
1 2 3 4 5 6 7 8 9 10 11
A B C D E F G H J K L M N P
Bild 10.9: Beispiele zum Pinout von PLDs/PGAs (Top view, Komponentenseite)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
12
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
10.4
Überblick über FPGA-Familien
FPGA-Bausteine ACTx von Actel
Die Familien ACT1, ACT2 und ACT3 von Actel repräsentieren verschiedene Generationen von
FPGAs und haben unterschiedliche Architekturen. Die Reihen ACT2 und ACT3 bestehen aus für die
kombinatorische und sequentielle Logik optimierten Zellen (C- und S-Module). Die einzelne Zelle
wird mit kaskadierten Multiplexern realisiert. Diese einfache Struktur bringt Vorteile in der Laufzeit,
hat aber Nachteile bzgl. Komplexität und Funktionalität der Logikeinheit.
Die Logikblöcke werden über horizontale Routingkanäle miteinander bzw. mit den I/O-Blöcken
verbunden. Dabei wird eine PLICE-Antifuse-Technik verwendet, die Bausteine lassen sich also nur
einmal programmieren.
Select
&
OUTEN
D00
M
U
X
D01
A0
Clear
&
B0
D10
Clock
Gate
for Latch
SLEW
(regional)
≥1
U01
CE
D0 Y
D1
CE
D0 Y
D1
GOUT
D-Flipflop
oder Latch
≥1
A1
B1
≥1
D Q
C
M
U
X
D11
OUT
M
U
X
EN
&
U02
SDATA
Y
Y
M
U
X
GIN
D1
D0
CE
≥1
INEN
Logik-Block
I / O - Zelle
Bild 10.10: Die FPGA-Familie Actel2/Actel3
Baureihe MPA10xx von Motorola
Die Logikzellen sind einfach aufgebaut und gestatten jeweils die Realisierung eines einzelnen Gatters
oder Speicherelementes. Sie verfügen über eine spezielle Carry-Logik, wodurch sich auch
arithmetische Funktionen effektiv implementieren lassen. Die MPA-Bausteine sind in sRAMTechnologie realisiert und damit in-circuit-rekonfigurierbar.
0
:
:
7
M
U
X
Vertical
Clock
C
Vertical
Reset
M
U
X
Medium Bus
C
C
0 1 2 3
MUX
&
0
:
:
7
C
C
M
U
X
C
M
U
X
LogikFunktionsBlock
M
U
X
Bild 10.11: Logikblock der Familie MPA10xx von Motorola
Horizontal Wired OR
Output MUX
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
13
FPGA-Familie FLEX8000 von Altera
Die zu implementierende Logik wird in vier Eingangs-LUTs mit programierbaren Registern geladen.
Die einzelnen Logikblöcke können kaskadiert werden, wobei die von den Einheiten verursachten
Verzögerungszeiten berechenbar sind. Bei FLEX-Bausteinen mit größeren Gehäusen können sogar
mehrere 32-Bit-Busse in einem einzigen Baustein integriert werden. Wegen der hohen Anzahl von
Speicherelementen eignen sich diese Bausteine der Familie FLEX8000 z.B. für Anwendungen wie
digitale Signalprozessoren (DSP), für Datenpfadmanipulationen und zur Datentransformation. Alle
Bausteine verfügen intern über einen CMOS-RAM, sind also in-circuit- rekonfigurierbar.
QS
A1
A2
A3
A4
Cascade
Carry
IN OUT IN OUT
DATA1
DATA2
DATA3
DATA4
CTRL1
CTRL2
LUT
M OUT
U
X
Cascade Chain
Carry Chain
Clear/PresetLogic
D Q
CTRL3
CTRL4
M
U
X
Clock Select
Logik - Block FLEX8000
C
CLR
A5
A6
B1
B2
C1
C2
D1
D2
E1
E2
F1
F2
F3
F4
F5
F6
QC
QR
&
& 0
& 1
& 0
& 1
AZ
M
U
X
M
U
X
OS
0
OZ
M
U
X
1
D Q
QZ
C
R
NZ
NS
&
FZ
Logik - Block pASIC
Bild 10.12: Logikblöcke der FPGA-Familien FLEX8000 und pASIC
Die Familie FLEX10k von Altera soll nach Angaben des Herstellers eine echte Alternative zu
Gate-Arrays sein. Die Logikfunktionen können in Logic-Array-Blöcken (LABs) oder in EmbeddedArray-Blöcken (EABs) implementiert werden.
{ Ein Logikblock LAB besteht aus acht Logikelementen, die miteinander verbunden sind. Die
EABs können wahlweise als Speichereinheit oder Logikeinheit konfiguriert werden. Jeder
EAB kann einen RAM oder ROM mit einer Speicherkapazität von bis zu 2 kBit realisieren.
Die EABs sind kaskadierbar und lassen sich so zu größeren Einheiten verschalten.
{ LABs und EABs werden untereinander über matrixförmig angeordnete Verbindungsleitungen
verdrahtet (Fast-Track-System).
{ Die Anzahl von LABs/ Baustein soll sich gegenüber der FLEX8000-Familie vervierfachen.
Geplant sind sieben Bausteine mit Gatterdichten von 10 000 bis 100 000 (Stand 1995).
{ Zur Entwurfsunterstützung steht das Entwicklungssystem MAX+PLUSII zur Verfügung.
14
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
Reihe pASIC von Quicklogic
Die einzelnen Logikzellen bestehen aus zweistufig verschachtelten Multiplexern mit 14 Eingängen
und verschiedenen Ausgängen (Bild 10.12). Es lassen sich somit bestimmte Logikfunktionen mit bis
zu 14 Variablen in einer Zelle realisieren. Durch eine gleichmäßige Verteilung der horizontalen und
vertikalen Verbindungskanäle zwischen den Logikzellen wird eine sehr regelmäßige und kompakte
Struktur der Bausteine erreicht. In Verbindung mit einer speziellen Antifuse-Technik (ViaLink)
werden sehr kurze Wege und damit kleine Laufzeiten erzielt.
FPGA-Bausteinserie HIPER von Plus Logic
Die Bausteine der HIPER-Serie von Plus Logic sind so ausgelegt, daß sich auch für speicher- und
rechnerorientierte Funktionen, also spezielle Rechenalgoritmen und Datenmanipulationen, effektive
Lösungen ergeben (HIPER - Hierarchically Interconnected and Programmable Efficient Resources).
Alle HIPER-Bausteine enthalten mehrere E/A-Blöcke und je nach Typ 4, 8 oder 16 sogenannte
Ressource-Blöcke RB. Deren Innenschaltung kann blockweise vom Hersteller beliebig ausgetauscht
werden, so daß die gewünschten Modifikationen der Bausteine erreicht werden. Bei Auslegung als
Logikblöcke werden sie auch Funktionsblöcke FB genannt.
FC
FB4
FB5
FB3
FB6
FB2
FB7
FB1
FB8
Sense-Verstärker
Schiebetakt
und Übertrag
universelle Verbindungsmatrix UIM
Bild 10.13: Architektur der HIPER-Bausteine von Plus Logic (Quelle: Elektronik 15/1991, S. 95ff)
Das wesentliche Merkmal der Bausteine der Hiper-Serie ist eine universelle Verbindungsmatrix
UIM (Universal Interconnected Matrix) mit EPROM-gesteuerten Schaltern in den Koppelpunkten.
Diese UIM fixiert die Verbindungen und entspricht in ihrer Grundstruktur einem Kreuzschienenverteiler.
Auch bei voller Auslastung der gegebenen Struktur lassen sich damit alle internen Funktions- und
E/A-Blöcke miteinander verbinden, ohne die Signallaufzeiten zu erhöhen. Es werden drei Familien
dieser CMOS-Bausteine angeboten: H2000, H4000 und H5000.
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
15
Die H2000-Familie ist speziell für Aufgaben der Kontroll-Logik (Watch-dog) konzipiert. Typische
Anwendungen sind Synchronzähler, Sequenzer, DRAM-Controller und Motor-Phasensteuerungen.
Die angebotenen vier Bausteintypen haben mit 2000 ... 10 000 Gatteräquivalenten pro Chip etwa die
Komplexität von 4 ... 20 PLD-Bausteinen vom Typ 22V10.
Die H4000-Familie ist speziell für rechnerorientierte Datenpfad-Operationen (ALU) in Verbindung
mit programmierbarer Logik ausgelegt. Die Bausteine enthalten mehr als 30 000 Gatteräquivalente
und arbeiten mit einem Systemtakt bis zu 67 MHz. Die entsprechende Rechenleistung kann so Werte
bis zu 275 . 106 32-Bit-Integer-Operationen pro Sekunde erreichen.
Die H5000-Familie ist für speicherorientierte Aufgaben wie z.B. Datenmanipulationen konzipiert.
Zusätzlich zu den Funktionsblöcken der Bausteine der H2000-Familie bietet sie einen parallel oder
seriell konfigurierbaren SRAM-Bereich (4 Blöcke mit einem Speicherbereich von je 64 x 9-Bit).
Die HIPER-Bausteine enthalten neben den als Eingangs- bzw. Ausgangspfad festgelegten Arten von
E/A-Blöcken auch universelle E/A-Pfade. Als Eingänge können sie wahlweise mit Latch, Register
oder Direktansteuerung betrieben werden. Beim Einsatz als Ausgang können diese Pfade hochohmig
gesteuert werden. Auch ein bidirektionaler Betrieb ist möglich.
ORCA-Serie von AT&T Microelectronics
Die Bausteine der ORCA-Serie (Optimized Reconfigurable Cell Array) besitzen eine homogene
Struktur von programmierbaren I/O-Zellen PIC und programmierbare Logikzellen PLC. Die Zellen
werden durch bidirektionale Kanäle miteinander verdrahtet.
Eine 64-Bit-Look-Up-Table und vier Flipflops bzw. Latches bilden den Kern der Logikzellen. Für
die LUTs können die drei Betriebsarten kombinatorischer Mode, Ripple Mode oder Speicher Mode
gewählt werden. Für den Ripple Mode sind sogenannte Ripple-Addierer mit schnellem Carry
implementiert. Im Speichermode werden die Zellen als RAM konfiguriert (ähnlich zu XC4000).
Die Bausteine der ORCA-Serie werden mit dem Testverfahren Built-In-Boundary-Scan angeboten.
Sie sind sRAM-basiert und damit auch bei laufendem Betrieb rekonfigurierbar.
UCC
pull up
Express
Bus
pull up
Entry
Cell
Delay
Express
Bus
TTL/
CMOS
Tristate
Polarity
TTL/
CMOS
AE
IN
DOUT/
OUT
A
B
M
U
X
Slew
Rate
pull down
I/O - Zelle der ORCA - Reihe
Local Bus
Express
Bus
1
0
Exit
Cell
A
B
AE
Express
Bus
I/O - Zelle der Reihe AT6000
Bild 10.14: I/O-Zellen der FPGA-Familien ORCA und AT6000
M
U
X
Tristate
C
Open
Collector
Local Bus
Slew Rate
UCC
16
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
FPGA-Familie AT6000 von Atmel
Die einfache Logikzelle besteht in ihrem Kern aus einem symmetrischen 2-Eingangs- AND/XOR mit
Flipflop und programmgesteuerten Multiplexern (Bild 10.15). Die Gatter des Bausteins werden
miteinander über ein einfaches, aber sehr schnelles Netzwerk von Bussen verbunden, wodurch eine
effektive Kommunikation im Baustein möglicht ist (Bild 10.14).
Es gibt vier Bausteine in dieser Familie (AT 6002, AT6003, AT6005, AT6010). Sie arbeiten mit
Taktfrequenzen bis 70 MHz, bei Umschaltfrequenzen der Flipflops von 250 MHz. Der Ruhestrom
liegt im 100-µA-Bereich, der Betriebsstrom je nach Baustein bei (30 ... 170) mA.
AN
AE
AS
AW
1
AND - XOR - Kern
M
U
X
&
C
0
M
U
X
=1
Clock
C
BN
BE
BS
BW
1
M
U
X
D Q
C
R
1
LNS1
3
M
1 U
0 X
&
M
U
X
C
M
U
X
A
A
A
A
C
C
&
C
0
1 M
2 U
3 X
LEW1
B
B
B
B
M
U
X
programmgesteuerter
Multiplexer
C
C
LNS2
LEW2
Bild 10.15: Logikzelle der Atmel-Familie AT6000
Die Bausteine AT6000 sind in RAM-Technologie realisiert und somit wiederprogrammierbar. Sie
lassen sich im Betrieb voll oder partiell bis hinunter auf die Zellebene rekonfigurieren, ohne daß die
Registerinhalte der überschriebenen Funktionen verloren gehen. Zum Umprogrammieren einer Zelle
werden nur etwa 200 ns benötigt.
{ Der Hersteller Atmel bezeichnet seine rekonfigurierbare Hardware selbst als Cache Logic. In
den Bausteinen werden genau nur die Blöcke mit Funktionalität versehen, die bei der aktuellen
Applikation auch zum Einsatz kommen.
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
17
FPGA-Bausteine XC x000 von Xilinx
Alle Typen der Bausteinpalette XC2000, XC3000 und XC4000 realisieren kombinatorische Logik
nach dem LUT-Prinzip (Look-Up-Table). Alle Bausteine zeigen eine regelmäßige Anordnung
identischer Logikblöcke (LB's), die durch eine matrixförmige Verbindungsstruktur untereinander oder
mit den I/O-Blöcken verbunden sind. Die Länge der einzelnen Verbindungsleitungen und damit auch
die Signallaufzeiten werden durch die konkrete Verdrahtungsstruktur bestimmt.
Die Komplexität (Körnung) steigt mit der Seriennummer, d.h. Bausteine der Reihe XC4000 haben
mehr Funktionen mit mehr Eingängen je Logikzelle als die Bausteine der Reihe XC2000.
Die Bausteine der Reihe XC3000 verfügen über Register und Logikgeneratoren, die jede logische
Funktion mit bis zu 5 Variablen realisieren. Durch Verknüpfung von Generatoren lassen sich auch
Funktionen mit noch mehr Eingangsvariablen realisieren. Außerdem können die einzelnen Zellen der
Bausteine als RAM konfiguriert werden.
Die Bausteine der Reihe XC4000 besitzen zusätzlich eine schnelle Carry-Logik, z.B. für Addierer,
Komparatoren usw. Sie unterstützen einen Boundary-Scan-Test nach IEEE 1149.1-1990 (Test über
spezielle Schieberegister-Ketten in den I/O-Stufen und eingetaktete 1-0-Folgen).
Alle Bausteine halten die aktuellen Strukturdaten in einem statischen RAM. Damit ist grundsätzlich
eine In-Circuit-Rekonfigurierung möglich, für die Initialisierung des RAM ist ein externer ROM
nötig. Die typische Struktur der I/O-Zellen der XC4000-Bausteine ist in Bild 10.16 angegeben.
678
programmgesteuerte Speicherzellen
OE
M
U
X
OUT
M
U
X
OUTPUT
CLOCK
D Q
PegelAnpaßstufe
M
U
X
M
U
X
I2
M
U
X
M
U
X
Q D
passive
pull-up/
pull-down
M
U
X
C
I1
INPUT
CLOCK
Slew-RateControl
M
U
X
Delay
C
M
U
X
programm≡ gesteuerter
Multiplexer
Bild 10.16: I/O-Zelle der Reihe XC4000 (Xilinx)
Der EPLD-Baustein XC73144 setzt mit 7,5 ns Durchlaufzeit einen Leistungsstandard in der Klasse
von EPLDs mit einer Komplexität von mehr als 3500 nutzbaren Gattern (Stand 1995). Er wird in 10-,
12- und 15-ns-Ausführung als 160-Pin-PQFP sowie als 225-Pin-Ball-Grid-Array angeboten.
18
10. Anwendungsspezifische Integrierte Bausteine (ASICs)
Hersteller
FPGA Familie
Anzahl Zellen
Anzahl
IO
Flipflops
(ohne IO)
Logikzelle
TristateBus
Actel
ACT1
ACT2
ACT3
295 - 547
451 - 1232
200 - 1377
57 - 69
83 - 140
80 - 228
147 - 273
231 - 624
104 - 697
MUX
MUX
MUX
nein
nein
nein
PLICE-Antifuse
PLICE-Antifuse
PLICE-Antifuse
Altera
FLEX8000
FLEX10k
208 - 1296
78 - 208
208 - 1296
LUT 1x4
nein
Entw.-system
MAX+PLUSII
Atmel
AT6000
1024 - 6400
96 - 172 1024 - 6400
2-EingangsAND/XOR
ja
Entw.-system
ATDS2100PC
AT&T
ORCA
100 - 576
160 - 288 400 - 2304
LUT
2x5; 1x6
nein
Motorola
MPA1036
3600
Plus Logik
H2000
H4000
2000 - 10.000
> 30.000
H5000
2000 - 2500
QuickLogic
(Cypress)
Xilinx
120
900
2-EingangsAND/XOR
nein
36 - 72
132
72
36
spezielle
"Plusmacro"Zellen
ja
ja
MUX
nein
+ 4 SRAM
64 x 9 - Bit
pASIC
96 - 768
56 - 164
XC 2000
64 - 100
58 - 74
64 - 100
LUT 1x4
nein
XC 3000
64 - 484
64 - 176
128 - 968
LUT 1x5
ja
XC 4000
64 - 576
64 - 192
128 - 1152
LUT
2x4; 1x5
ja
XC 5000
96 - 768
ja
Bemerkungen
Entw.-system
PLUSTRAN
spez. Antifuse
(ViaLink)
Entw.-system
XACT
ja
* LUT - Look-Up-Table (Tabellenspeicher)
Tafel 10.4: Überblick über FPGA-Familien (Quelle: Elektronik 9/95 vom 2.5.1995)
Cache-Logik
Der Begriff Cache wird meist für einen schnellen Zwischenspeicher in Rechnern oder für Digitale
Signalprozessoren (DSP) verwendet. Dabei werden nur die gerade aktiven Daten in den schnellsten
Speicher, typisch ein RAM, geladen. Die nicht benötigten Daten dagegen verbleiben im billigeren
Systemspeicher wie EPROM oder Disk.
Dieses Konzept wird zunehmend auch bei den RAM-basierten FPGAs bzw. LCAs angewendet und
als Cache-Logik bezeichnet (1994, Atmel). Nur die aktiven Funktionen der aktuellen Applikation
werden in den RAM des FPGA-Bausteins implementiert, während die nichtaktiven Funktionen und
Strukturdaten in einem kostengünstigeren Konfigurationsspeicher, z.B. EPROM, abgelegt sind. Sie
verbrauchen in diesem Zustand praktisch auch keine Leistung (Ruhestrom im µA-Bereich).
{ Cache-Logik ist eine kostensparende Methode zur effektiven Implementierung von Logik.
Zur Implementierung von Cache-Logik müssen die FPGA-Bausteine dynamisch, also im laufenden
Betrieb, vollständig oder partiell rekonfigurierbar sein, ohne den Ablauf der übrigen Logik zu stören.
Dafür ist eine symmetrische Baustein-Architektur vorteilhaft, damit in jedem verfügbaren freien Platz
eine Logikfunktion generiert werden kann. Zusätzlich erleichtert diese Symmetrie den Aufbau von
Arrays zur Realisierung größerer Einheiten.
11. Störeinflüsse bei der Datenübertragung
11
11.1
1
Störeinflüsse bei der Datenübertragung
Allgemeiner Überblick
Mit zunehmender Komplexität der Schaltkreise bei gleichzeitig wachsender Schaltgeschwindigkeit
wird die Zuverlässigkeit informationsverarbeitender Systeme entscheidend von einer störungsfreien
Signalübertragung zwischen den Teilsystemen bestimmt. Zu beachten sind u.a. folgende Probleme:
{ Übertragung einer großen Anzahl von Signalen mit steilen Signalflanken (Anzahl und
Abstand der Übertragungsleitungen, Übersprechen),
{ räumliche Ausdehnung des digitalen Systems (Netze, Laufzeiten),
{ gleichzeitiges Schalten mehrerer Ausgänge (Stoßbelastung der Versorgungsspannung).
Als Störungen bei der Datenübertragung werden alle Abweichungen von geforderten Kennwerten
bezeichnet (Impulsverlauf, Schaltpegel, Betriebsspannung, Massepotential, ...). Störspannungen
treten z.B. in Form von Verzerrungen der Impulsflanken, als Störspitzen bei L- und/oder H-Pegel
sowie auf den Versorgungsleitungen (UCC und GND) auf. Grundsätzlich werden unterschieden:
{ Störspitzen, die die Signalpegel von der Schaltschwelle US der Gatter in Richtung UCC /Masse
(und darüber/darunter) verändern und
{ Störspitzen, welche die Signalpegel in Richtung Schaltschwelle US der Gatter verändern (und
darüber/darunter).
U
UH
US
UL
t
Bild 11.1: Impulsverlauf mit Störspitzen
Von der Schaltschwelle US wegführende Störspannungen sind praktisch unkritisch, da sie mit
Begrenzerschaltungen unwirksam gemacht werden können, falls sie die zulässigen Grenzwerte der
überschreiten. Probleme bereiten die zur Schaltschwelle US gerichteten Störspannungen, da sie zu
Fehlschaltungen führen können und sich nicht ohne weiteres unterdrücken lassen (Signalbereich).
Die wichtigsten Störquellen in digitalen Schaltungen sind:
{
{
{
{
Reflexionen auf Verbindungsleitungen,
Stromstöße auf Verbindungs- und Erdleitungen,
Überkoppeln zwischen Leitungen (Übersprechen),
Elektrostatische Entladungen (ESD).
Für Untersuchungen des Schaltverhaltens digitaler Schaltungen mit Circuit-Simulationssystemen
wie PSPICE wird häufig ein vereinfachtes Zweitor-Ersatzschaltbild (Bild 11.2) verwendet. Es kann
um Kapazitäten zur Nachbildung des Zeitverhaltens erweitert werden.
Dabei spielen die dynamischen Aus- und Eingangswiderstände der Schaltkreise (Ausgangs- und
Eingangsstufen) eine wichtige Rolle. Sie sind typisch um eine Größenordnung kleiner als die
statischen Widerstände (Bild 11.2).
2
11. Störeinflüsse bei der Datenübertragung
II
UI
Ra
Re
Ua
dynamische Widerstände
Io
74
Uo
TTL - Baureihen
74LS
74S
Ausgangswiderstand R a
für LH-Flanke
für HL-Flanke
120 Ω
12 Ω
350 Ω
30 Ω
50 Ω
10 Ω
Eingangswiderstand R e
1,2 kΩ
4 kΩ
0,8 k Ω
74ALS
200 Ω
25 Ω
8 kΩ
Bild 11.2: Zweitor-ESB für Schaltvorgänge; dynamische Widerstände von TTL-Gattern
11.2 Störungen durch Leitungsreflexionen
11.2.1 Elektrisch lange Leitung, Wellenwiderstand
In Digitalschaltungen werden die Daten in Form von Spannungsimpulsen meist über Eindrahtleitungen (Leiterbahnen auf Platinen, Flachbandkabel, ...) übertragen. Bei kurzen Leitungen wirken
sich nur der ohmsche Widerstand und die Kapazität der Leitung aus.
Die Dämpfung der Impulsamplitude durch den Leitungswiderstand ist vernachlässigbar, solange die
Treiberleistung der Schaltung groß genug ist, um die logischen Pegel zu realisieren. Die Kapazität
hat verzögernden Einfluß auf Signaländerungen.
Mit immer steileren Flanken werden die Spannungsimpulse zunehmend durch die Eigenschaften
der Leitung selbst beeinflußt. Dieser Einfluß wird um so stärker, je kürzer die Flankenzeiten der zu
übertragenden Impulse relativ zur Leitungslänge sind. Bei Verbindung von TTL-Schaltkreisen über
eine Leitung von (1 ... 3) m kann man sowohl am Eingang der Empfängerschaltung als auch am
Senderausgang Impulse mit überlagerten Schwingungen messen. Form und Größe der überlagerten
Schwingungen sind von der Frequenz und Flankensteilheit der Impulse sowie von den Eigenschaften der Leitung abhängig.
{ Die Änderung eines Spannungspegels in endlicher Zeit bewirkt einen Stromanstieg bzw.
-abfall und damit die Änderung des elektromagnetischen Feldes. In der Folge kommt es zu
einer Ladungsverschiebung in der Leitung selbst, was wiederum ein Magnetfeld verursacht
(Maxwell'sche Gesetze). Dieser Vorgang wiederholt sich ständig und wandert mit endlicher
Ausbreitungsgeschwindigkeit v über die gesamte Leitungslänge l. Man spricht von einer
elektromagnetischen Welle.
Wird die Leitung an einer Stelle inhomogen, z.B. durch Anschluß eines Empfängers, so wird diese
Welle reflektiert und läuft zum Sender zurück. Dort trifft sie wieder auf eine inhomogene Leitung
infolge des Ausgangswiderstandes des Senders und wird erneut reflektiert.
{ Hinlaufende und reflektierte Welle überlagern sich zu einer stehenden Welle. Für die Wellenlänge λ der Grundschwingung gilt = 2 l . Ist T = 1/f die Zeit für Hin- und Rücklauf einer
t
t
Welle auf der Leitung der Länge l, so spricht man bei l > 2f v bzw. l > 2r v von kritischer
Leitungslänge bzw. elektrisch langer Leitung.
Dabei stehen t f und t r für die Impulsflankenzeiten.
Die Entstehung elektromagnetischer Wellen läßt sich anhand einer Ersatzschaltung (Bild 11.3) für
ein Längenelement x der homogenen Leitung mit den Kirchhoff'schen Sätzen erklären /6/.
11. Störeinflüsse bei der Datenübertragung
3
Am Anfang des Längenelementes x liegt die Spannung u und es fließt der Strom i. Ohmscher und
induktiver Widerstand bewirken eine Spannungsänderung u , die Stromänderung i wird durch
den kapazitiven Widerstand und die Leitfähigkeit G der Isolation verursacht. Es gilt:
−u = (i . R + L di ) . x und
dt
R
i
− i = (G . u + C du ) . x .
dt
(11.1)
i +∆i
L
∆i
∆u
C
u
G
i +∆i
i
u + ∆u
∆x
Bild 11.3: Ersatzschaltung einer homogenen Doppelleitung (Längenelement ∆x)
Der Übergang zum Differentialoperator , Differenzieren und Umformung liefert schließlich die
sogenannten Telegrafen- oder Wellengleichungen für elektromagnetische Vorgänge /6/. Diese
partiellen Differentialgleichungen 2.Ordnung beschreiben den Strom-/Spannungsverlauf auf einer
Doppelleitung in Abhängigkeit von der Zeit t und dem Ort x der Leitung
2 u = LC 2 u
x 2
t 2
und
2 i = LC 2 i .
x 2
t 2
(11.2)
Eine Lösung dieser Gleichungen ist die harmonische Welle mit
x
u = u o sin * (t − x
v ) und i = i o sin * (t − v ) .
(11.3)
Diese Strom- und Spannungswelle breitet sich mit der Geschwindigkeit v längs der Leitung aus.
Die gesamte Energie der Welle steckt dabei im Feld, die Leitung dient nur der Wellenführung. Für
die Ausbreitungsgeschwindigkeit v erhält man v = 1 mit LC = o r o r .
LC
{ Eine elektromagnetische Welle breitet sich im Vakuum mit Lichtgeschwindigkeit entlang der
Leitung aus (v = 3 . 108 m. s-1). Für Leiterkarten bzw. Koaxialkabel gilt v l 1, 9 . 10 8 ms −1 . Die
Signallaufzeit tS ergibt sich dafür zu tS l 5,3 ns/m.
{ Ändert sich innerhalb dieser Laufzeit der Wert einer Schaltflanke wesentlich, so treten auf der
Leitung Reflexionen auf.
Das Verhältnis der Amplituden von Spannung uo und Strom io an einer Stelle der Doppelleitung
wird Wellenwiderstand Z genannt
uo
=Z=
io
L
C
.
(11.4)
{ Der Wellenwiderstand Z liegt typisch im Bereich Z = (30 ... 300) und ist sehr stark von der
Ausführung der Leitung abhängig (Eindrahtleitung, Koaxialkabel, verdrillte oder unverdrillte
Zweidrahtleitung, ... ).
4
11. Störeinflüsse bei der Datenübertragung
11.2.2 Schaltverhalten elektrisch langer Leitungen
Zur näherungsweisen Berechnung des Schaltverhaltens elektrisch langer Leitungen wird iterativ
nach dem in Bild 11.4 gezeigten Zweitor-Ersatzschaltbild vorgegangen (TB Elektrotechnik, Hrsg.
E. Philippow). Es ergibt sich aus dem Ersatzschaltbild für Schaltvorgänge in Bild 11.2.
i
R1
e1
1
Z
U1
b
Z
U1
u 1 = u 2 − i 2 Z |t − $
U2
i2
R2
U2
E2
d
u 2 = u 1 + i 1 Z |t − $
Bild 11.4: ESB zur iterativen Berechnung des Schaltverhaltens von Leitungen
Zum Zeitpunkt t = 0 schaltet die Quelle e1 mit der Amplitude E 1 . Die Änderung der Torspannung
am Eingang der Leitung ergibt sich aus der Spannungsteilung über R1 und Z zu U 1 = E 1 R Z+ Z .
1
Diese Flanke U 1 erreicht zum Zeitpunkt t = τ (Signallaufzeitkonstante) als hinlaufende Welle das
Leitungsende (Sendereingang). Sie wird dort reflektiert und läuft zum Leitungsanfang zurück. Zum
Zeitpunkt t = 2 . τ erreicht die rücklaufende Welle den Senderausgang und wird erneut reflektiert.
Damit entsteht eine zweite hinlaufende Welle usw. Bei jeder Reflexion entsteht eine Überlagerung
aus dem Pegel vor Eintreffen der Flanke, der ankommenden und der reflektierten Welle.
Das Verhältnis aus den Amplituden der reflektierten und hinlaufenden Welle wird Reflexionsfaktor
r genannt:
u
i
(11.5)
r = u hr = r = R − Z .
R+Z
ih
Der Wert von r kann zwischen -1 < r < +1 variieren, da der ohmsche Widerstand R Werte
zwischen 0 < R < ∞ annehmen kann. Damit keine Reflexionen auftreten (r = 0), muß der
Abschlußwiderstand der Leitung R = Z gewählt werden (mindestens einseitiger Abschluß). Das
Überschwingen infolge der Reflexionen klingt um so schneller ab, je kleiner der Reflexionsfaktor r
an zumindest einem Leitungsende ist (Anpassung) und je kürzer die Leitungslänge (Laufzeit) ist.
Bild 11.5 zeigt eine Anordnung mit TTL-Gattern und das dafür näherungsweise ermittelte
Einschwingverhalten.
Eindrahtleitungen
Die Eindrahtleitung (Einzeldraht, Leiterzug auf Platinen) ist die einfachste Verbindung und wird
für kurze Entfernungen fast ausnahmslos verwendet.
Als elektrisch kurze Leitung wirkt sie bezüglich der Schaltflanken wie eine kapazitive Last.
Als elektrisch lange Leitung ist ihr Wellenwiderstand 100 Ω < Z < ... kΩ stark vom geometrischen
Aufbau, insbesondere vom Abstand zum nächstgelegenen Masseleiter abhängig. Eine Anpassung
ist deshalb schwierig.
{ Eindrahtleitungen sollten deshalb nur für elektrisch kurze Leitungen verwendet werden. Für
lange Leitungen sollten prinzipiell verdrillte Zweidrahtleitungen verwendet werden.
11. Störeinflüsse bei der Datenübertragung
UCC = 5V
5
UCC
RS = 100 Ω
4 kΩ
R 1= 20 Ω
Z = 80 Ω ; τ
D
R 2= 20 Ω
5
U
V
Re >> Z
LH-Sprung
U2(t)
4
3
2
U eHmin
U1(t)
1
U eLmax
t
0
4
1
2
3
U
V
5
6
7
8
9
U1(t)
1
0
-2
11
UeHmin
2
-1
10
HL-Sprung
U2(t)
3
4
1
2
U eLmax
3
4
U2D (t)
5
6
t
7
8
9
Bild 11.5: Einschwingverhalten an verlustfreien Leitungen (vgl. ESB in Bild 11.4)
Verdrillte Leitungen
Gegenüber Koaxialkabel lassen sich verdrillte Leitungen aus isolierten Schaltdrähten wesentlich
einfacher verlegen und kontaktieren, außerdem sind sie kostengünstiger. Bei einer Verdrillung von
etwa (30...100) Windungen je Meter beträgt der Wellenwiderstand Z = (130 ... 100) Ω. Ein weiterer
Vorteil verdrillter Leitungen kann bei symmetrischer Signalübertragung (vgl. auch Abschnitt 11.3)
genutzt werden:
{ Eingekoppelte Störungen wirken sich infolge der Symmetrie in gleicher Weise auf beide
Leitungen aus und stellen somit ein Gleichtaktsignal dar.
{ Innerhalb des zulässigen Gleichtaktbereiches der Empfänger wird es im Ausgangssignal
durch die Gleichtaktunterdrückung der Differenz-Eingangsstufen der Empfänger nicht bzw.
nur abgeschwächt wirksam.
6
11. Störeinflüsse bei der Datenübertragung
Allgemeine praktische Maßnahmen zur schaltungstechnischen Reduzierung des Überschwingens
infolge Leitungsreflexionen sind Begrenzung und Leitungsanpassung (Bild 11.6).
U2
U1
1
1
U1
1
U2
1
Ra
a)
UCC
U1
1
R1= 2 Z
b)
U2
1
1
R2 = 2 Z
U2
1
U1
R2 = Z
c)
d)
1
U1
1
U2
1
1
1
e)
Bild 11.6: Schaltungstechnische Maßnahmen zur Verringerung von Reflexionen
Mit einer Begrenzerdiode am Leitungsende (Bild 11.6 a) wird das negative Überschwingen auf die
Diodenflußspannung begrenzt. Gleichzeitig wird so die rücklaufende Welle kleiner und damit auch
die gesamte Einschwingzeit. Besonders gut geeignet sind Schottky-Dioden wegen ihrer geringen
Flußspannung und ihrer hohen Schaltgeschwindigkeit.
Mit Hilfe eines Widerstandes R = Z bzw. eines Spannungsteilers (R1 || R2 ) = Z (Bild 11.6 c, d) kann
am Leitungsende Anpassung erreicht werden. Die unterschiedlichen Abschlußwiderstände am
Eingang bleiben erhalten. Der Spannungsteiler verursacht dabei beträchtliche Verlustströme. Der
einzelne Widerstand bewirkt eine Signaldämpfung und somit eine Verringerung des Störabstandes.
Eine wirksame Maßnahme in fast allen praktischen Fällen ist ein Reihenwiderstand Ra = r2 Z - R1
R −Z
mit r 2 = R 2 + Z (R1 , R2 - dynamische Widerstände für die HL-Flanke von Sender und Empfänger).
2
Durch Widerstand Ra am Leitungsanfang wird die vom Sender weglaufende HL-Flanke so weit
reduziert, daß am Leitungsende die Überlagerung von H-Pegel (vorheriger Pegel), ankommender
Welle und reflektierter Welle nahezu Null wird. Die Schottky-Diode D soll den Widerstand Ra für
die LH-Flanke überbrücken.
Der Spannunsabfall über Ra bei L-Pegel am Sender erhöht auch den L-Pegel an den Eingängen der
Empfänger (ca. 100 mV bei TTL). Ein zusätzliches Gatter kann diese Abhängigkeit verhindern
(Bild 11.6 e).
Bei Standard-TTL verringert sich bei Z = 130 Ω mit Ra = 105 Ω die negative Spannungsspitze von
ca. - 2 V auf ca. + 0,3 V (Bild 11.5). Die Laufzeit und die Impulsflanken vergrößern sich dabei nach
/3/ um etwa (1 ... 2) ns.
11. Störeinflüsse bei der Datenübertragung
11.3
7
Symmetrische und unsymmetrische Signalübertragung
Bei digitaler Signalübertragung wird zwischen symmetrischer und unsymmetrischer Betriebsart
unterschieden. Die Eindrahtleitung erlaubt nur eine unsymmetrische Übertragung. Dagegen kann
jede zweiadrige Leitung sowohl symmetrisch als auch unsymmetrisch betrieben werden.
Bei Eindrahtleitungen dient der Leiter zur eigentlichen Signalübertragung, als Rückleitung wird für
alle Verbraucher die gemeinsame Masseleitung genutzt (Bild 11.7 oben).
Bei längeren Leitungen oder/und größeren Störsignalen kann der Empfänger das Nutzsignal nicht
mehr eindeutig vom Störsignal in Form einer Gleichtaktspannung Ugl unterscheiden. Störsignale
zwischen Sender und Empfänger treten am Empfängereingang praktisch in voller Höhe auf, da der
Ausgangswiderstand des Senders keine Dämpfung der Gleichtaktspannung Ugl bewirkt.
Kennzeichen für symmetrische Betriebart ist, daß zwischen den beiden Leitungen immer die
gleiche Spannung existiert, deren Vorzeichen sich im Wechsel der logischen Zustände umkehrt
(Bild 11.7 unten). Bei symmetrischer Signalübertragung wird keine der beiden Leitungsadern als
Masseleitung genutzt, eine Leitung kann nur im stromlosen Zustand den Pegel Null annehmen.
{ Die wichtigste Eigenschaft symmetrischer Übertragung ist die Fähigkeit zur Unterdrückung
von Gleichtaktsignalen. Gleichzeitige Potentialänderungen auf beiden Leitungen und damit
am Differenzeingang des Empfängers haben praktisch keinen Einfluß auf das Ausgangssignal, solange die Gleichtaktspannung kleiner ist als der Gleichtaktaussteuerbereich des
Empfängers.
{ Im Vergleich zu unsymmetrischer Signalübertragung können wesentlich kleinere Signalpegel
verwendet werden (Empfängerempfindlichkeit 30 mV ... 300 mV).
{ Spezielle Sender- und Empfängerschaltkreise für symmetrischen Betrieb werden angeboten
(vgl. auch Abschnitt 12).
Sender
Empfänger
a
D
EN
e
Daten
EN
GND2
GND1
Sendererde
Z
Z
U gl
EN
Empfängererde
EN
a
Daten
Daten
b
Z
Sender
Am 26LS31
Z
a
b
Empfänger
Am 26LS32
Bild 11.7: Unsymmetrische und symmetrische Signalübertragung
8
11. Störeinflüsse bei der Datenübertragung
11.4
Störungen durch Übersprechen
Zwischen benachbarten stromführenden Leitungen treten elektrische und magnetische Kopplungen
auf. Wird auf einer Leitung ein Impuls übertragen, so wird er durch das elektromagnetische Feld als
Störimpuls auf die zweite Leitung übergekoppelt. Dieser Vorgang wird Übersprechen genannt.
Amplitude und Dauer der übergekoppelten Störspannung sind stark von der Flankensteilheit der
Störimpulse, vom Abstand der Leitungen, der Geometrie der Anordnung sowie der Leitungslänge
abhängig. Sie bestimmen die wirksame Koppelimpedanz RK zwischen den Leitungen.
{ Die Amplitude einer eingekoppelten Störspannung ist proportional zum Verhältnis aus dem
Wellenwiderstand Z und der Koppelimpedanz RK (Koppelkapazität CK , Flankensteilheit).
Verdrillte Leitungen haben bei mitverdrilltem Erdleiter ein Verhältnis Z/RK > 4 und sind infolge
der Schirmwirkung des Erdleiters weit unempfindlicher gegen Übersprechen als ein Bündel von
Einzelleitungen.
{ Der Erdleiter verringert den Wellenwiderstand Z und vergrößert die Koppelimpedanz RK.
Erheblichen Einfluß auf die Größe der übergekoppelten Störspannung und deren Auswirkung hat
auch die Signalflußrichtung in benachbarten Leitungen (Bild 11.8). Erfolgt die Übertragung im
Störer S1 und in der gestörten Leitung in gleicher Richtung, so trifft der eingekoppelte Störimpuls
zunächst auf den niederohmigen Ausgang des Senders S2 und wird gedämpft. Bei gegensinnigem
Signalfluß kann sich die Störamplitude voll ausbilden (Eingang E2 ist hochohmig) und als Welle
auf der Leitung zum Sender S2 laufen, dort reflektiert werden usw.
{ Leitungsbündel mit gegensinnigen Signalflußrichtungen sollten vermieden werden. Ist das
nicht möglich, sind Schutzmaßnahmen (Schirmung o.a.) gegen Übersprechen vorzusehen.
e1
S1
E1
1
1
S2
e2
1
CK
a1
e1
E2
1
a2
a2
S1
E1
1
1
E2
CK S
2
1
1
a1
e2
Bild 11.8: Übersprechen in Abhängigkeit der Signalflußrichtungen
Kapazitives Übersprechen
Auch zwischen relativ kurzen Leitungen tritt ein sogenanntes kapazitives Übersprechen auf. Die
wirksame Koppelkapazität CK ist besonders bei über längere Strecken parallel laufenden Leitungen
stark ausgeprägt (Modell eines Plattenkondensators).
{ Ein Störimpuls bewirkt auf der gestörten Leitung eine Fehlschaltung, wenn seine Impulslänge
den kritischen Wert überschreitet (dynamischer Störabstand). Für TTL-Reihen liegt dieser
kritische Wert der Koppelkapazität bei CK,krit ≥ 1 nF.
11. Störeinflüsse bei der Datenübertragung
9
Die Auswirkungen eines kapazitiv eingekoppelten Störimpulses auf einer gestörten Leitung sind
bei L- bzw. H-Pegel unterschiedlich und lassen sich mit der Ersatzschaltung nach Bild 11.2
ermitteln. Bild 11.9 zeigt die idealisierten Verhältnisse bei der Übertragung zwischen TTL-Gattern.
10 Ω 1
H/L
CK
100 Ω
2
3,6 V
0
100 Ω 1
U
0,5 V
t
L/H
CK 2
10 Ω
U
0,5 V
t
Bild 11.9: Kapazitives Übersprechen zwischen elektrisch kurzen Leitungen
Reflexion eingekoppelter Störsignale
Störende Reflexionen können auch durch eingekoppelte Störspannungen auftreten. Eine auf die
Signalleitung mit den Abschlußwiderständen nach Bild 11.5 bzw. Bild 11.6 eingekoppelte Störspannung läuft zunächst in beide Richtungen. Führt die gestörte Leitung H-Potential, dann ist sie
bei TTL-Schaltungen senderseitig angepaßt (Ri l Z) und nur am überangepaßten Leitungsende
(R e >> Z ) tritt eine einmalige Reflexion auf. Liegt dagegen die Leitung auf L-Potential, so ist sie an
beiden Leitungsenden fehlangepaßt. Die reflektierten Anteile der eingekoppelten Störspannung
können sich am Empfänger zu einer größeren Störspannung überlagern.
{ Eine Signalleitung zeigt bei L-Potential oft eine größere Störamplitude als bei H-Potential
(trotz des niederohmigen Leitungsanfanges infolge der Senderausgangsstufe).
11.5
Störungen durch die Induktivität der Stromversorgungsleitungen
Schnelle Stromänderungen in den Zuleitungen der Stromversorgung eines Schaltkreises (Masse-,
Versorgungsspannungsleitung) erzeugen über die Induktivität dieser Leitungen eine Störspannung
l L i . Die Störspannung ist um so größer, je größer die Stromänderung
entsprechend U St = L di
t
dt
und je länger die Leitung und damit ihre Induktivität L ist. Zur Größenvorstellung kann man für
einen Leiterzug von (0,5 ... 1) mm Breite eine Induktivität von etwa L l 10 nH . cm −1 annehmen.
Beim Einsatz immer schnellerer Schaltungen (74 __> 74 S, 74 AS) ist dem Problem von Störspannungen auf den Versorgungsleitungen entsprechende Aufmerksamkeit zu widmen, da eine
höhere Schaltgeschwindigkeit auch eine größere Flankensteilheit bedingt.
Für eine kleine Leitungsinduktivität bei praktischen Schaltungsaufbauten sollte die Masseleitung
auf der Leiterplatte möglichst als gitterförmiges Netz von Leiterzügen ausgebildet werden. Die
einzelnen UCC - und Masseleiter sollten eine Mindestbreite von (2,5 ... 3) mm haben (Skin-Effekt).
Die Stromänderungen treten auf den Leitungen vom Schaltkreisanschluß zur Versorgungsspannung
UCC bzw. GND auf und lassen sich dort auch meßtechnisch nachweisen. Im wesentlichen gibt es
drei Ursachen für das Auftreten von Stromspitzen:
{ Auf- und Entladung kapazitiver Ausgangslasten,
{ Schaltverhalten der Ausgangsstufen,
{ unterschiedliche Speiseströme in den statischen Schaltzuständen.
10
11. Störeinflüsse bei der Datenübertragung
Kapazitive Ausgangslast
Neben Schaltzeiten, Leistungsverbrauch und Zuverlässigkeit wird durch die Lastkapazität auch das
Störverhalten digitaler Schaltungen entscheidend mitbestimmt. Beim Umschalten des Ausgangs
muß die Lastkapazität umgeladen werden, dabei fließt beim LH-Wechsel fast der Kurzschlußstrom.
Schaltverhalten der Ausgangsstufe
Störungen in der Stromversorgung werden durch das Schaltverhalten der Gatter und Schaltkreise
selbst erzeugt. So sind z.B. beim LH-Übergang am Ausgang beide Transistoren der Gegentaktausgangsstufe kurzzeitig leitend (vgl. Abschnitte 2 und 4).
Das bewirkt z.B. bei TTL-Gattern der Standard-Baureihe 74 für eine Zeitdauer von etwa 10 ns eine
Stromspitze des Speisestromes von > 15 mA, was zum Absinken der Versorgungsspannung und
damit zu Fehlschaltungen führen kann (kritisch insbesondere bei Flipflops).
Statischer Speisestrom
Eine weitere Störquelle ist der unterschiedliche Speisestrom in den beiden logischen Zuständen.
Bei jedem Umschalten (Taktimpuls) ändert sich die Stromaufnahme eines Gatters sprunghaft
zwischen ICCH und ICCL. Diese Stromänderungen können über die Induktivität der Versorgungsleitungen ebenfalls ein Absinken der Betriebsspannung verursachen.
U St
U CC
U* = U - U
CC St
CC
L
&
≥1
GND
UCC
+
-
&
i
≥1
CSt
L
USt
U*
=U
GND St
Bild 11.10: Störspannungen auf den Zuleitungen der Versorgungsspannung
Zur Unterdrückung dieser Störspannungen werden sogenannte Stützkondensatoren CSt eingesetzt,
die für die Dauer der Stromspitzen den zusätzlichen Strom liefern bzw. übernehmen. Sie wirken als
Puffer und reduzieren die Störspannungen auf den Versorgungsleitungen (Bild 11.10).
{ Es empfiehlt sich, für jeweils 2 ... 4 Schaltkreise einen Stützkondensator C = (10 ... 100) nF
direkt zwischen Betriebsspannungsanschluß UCC und Masse GND anzuschließen.
Diese Kondensatoren müssen selbst induktivitätsarm sein (Keramik, Tantal) und möglichst nahe an
den betreffenden Schaltkreisen angebracht werden. Die Wirksamkeit sinkt stark mit der Entfernung
vom Schaltkreis. Vorteilhaft sind u.a. "Micro-Q's", die unmittelbar unter dem Schaltkreis liegend
positioniert werden können und somit keinen zusätzlichen Platz beanspruchen.
Zur Unterdrückung der Brumm- und Störspannungen von und nach außen wird außerdem die
Betriebsspannung durch einen induktivitätsarmen Tantalkondensator mit C = (5 ... 100) µF je
Leiterkarte abgeblockt. Meist wird zusätzlich parallel ein Keramikkondensator mit C = 100 nF
geschaltet. Die Schutz- bzw. Siebwirkung läßt sich weiter verstärken, wenn der Kondensator durch
ein LC-Entstörfilter ersetzt wird.
12. Bussysteme, Schnittstellen
12
12.1
1
Bussysteme, Schnittstellen
Überblick
Für den Informationsaustausch zwischen den einzelnen Teilnehmern eines Systems hat sich in der
Digitaltechnik allgemein das Bussystem durchgesetzt. Die einzelnen Teilnehmer sind dabei
eingangs- und/oder ausgangsseitig parallel an einer gemeinsamen Sammelleitung, dem sogenannten
BUS, angeschlossen.
Oft wird dieser Systembus weiter unterteilt in Datenbus, Adreßbus (nicht immer erforderlich;
multiplex mit Daten) und Steuerbus.
Die Sender-Schaltkreise haben meist Ausgangsstufen mit Tristate-Verhalten. Sie müssen durch eine
Auswahlelektronik so angesteuert werden, daß höchstens ein Ausgang niederohmig ist (L oder H
sendet). Alle anderen Senderausgänge bleiben im Tristate-Zustand.
{ Nach DIN ist ein Bussystem eine Einrichtung zur kollektiven Kommunikation mehrerer
Teilnehmer untereinander, wobei jeder Teilnehmer mit jedem anderen direkt verkehren kann.
Es gibt zwei Grundtypen von Busstrukturen: Daisy-chain und Party-line (Bild 12.1). Weiter wird
zwischen parallelen und seriellen Bussen unterschieden.
1
2
3
Unidirektionale Bustreiber
z. B. DS 8282/83, 74 LS 241
Daisy - chain
1
2
Party - line
3
Bidirektionale Bustreiber/Empfänger
z. B. DS 8286/87, Am 2905/06/07
Bild 12.1: Grundtypen von Busstrukuren
Daisy-chain
Die Information läuft über unidirektionale Busse durch jedes Element des Systems (Masche), bis
sie das gewünschte Gerät erreicht. Ist das der Fall, meldet sich das angesprochene Element und
blockiert so den weiteren Umlauf der Information (Prioritätssteuerung auch bei Interruptsteuerung).
Jeder Teilnehmer ist sowohl Empfänger als auch Sender von Informationen.
Party-line
Bei diesem weitverbreiteten System sind alle Teilnehmer parallel am Bus angeschlossen. Im
allgemeinen ist der Bus bidirektional ausgelegt. Hardwaremäßig werden für bidirektionale Datenübertragung spezielle Transceiver-Schaltkreise benötigt.
2
12. Bussysteme, Schnittstellen
Parallele und serielle Busse
Der Datenaustausch erfolgt meist bit-parallel und byte-seriell, auch ein bit-serieller Betrieb ist
möglich. Je nach Variante spricht man von parallelen und seriellen Bussen.
Bitparallele Busse werden bevorzugt zur Übertragung hoher Datenraten über kurze Entfernungen
eingesetzt, z.B. innerhalb eines Rechners.
Die Vorzüge bitserieller Busse liegen im geringen Aufwand für Treiberstufen, Steckverbinder und
Übertragungsleitungen (oft einfache 2-Draht-Leitung). Die Datenübertragung ist auch bei großen
Entfernungen unproblematisch und der Hardwareaufwand für eine evtl. geforderte galvanische
Trennung ist vergleichsweise gering. Die Nachteile liegen im komplizierten Übertragungsprotokoll
und einer relativ geringen Datenrate.
Übertragungssteuerung in Bussystemen
Für den Informationsaustausch zwischen Teilnehmern eines Bussystems (Master-Sender, Talker
bzw. Slave-Empfänger, Listener) müssen diese während der Übertragung synchronisiert sein.
Bei synchroner Datenübertragung erhalten alle Busteilnehmer die gleiche Taktimpulsfolge oder
ihre Taktfolgen werden über spezielle Synchronisationsschaltungen (PLL) synchronisiert.
{ Es können nur Einheiten mit gleicher Systemgeschwindigkeit miteinander kommunizieren.
Bei asynchroner Datenübertragung wird auf die Synchronisation der Taktgeneratoren verzichtet. Es
wird ein echter Dialogverkehr mit Rückmeldung realisiert (Handshake- bzw. Quittungs-Betrieb).
{ Dabei können auch Teilnehmer mit unterschiedlichen Arbeitsgeschwindigkeiten problemlos
miteinander kommunizieren.
12.2
Parallele Bussysteme
Das Busprinzip ermöglicht es, relativ viele Bausteine auf einfache Weise miteinander zu koppeln.
Es existieren sogenannte "Einheitliche Bussysteme", die von mehreren Herstellern benutzt werden.
Die bekanntesten Vertreter paralleler Bussysteme sind die Varianten von Microcomputerbussen.
Wir wollen hier nur kurz auf den IEC-Bus eingehen und dafür die asynchrone Datenübertragung
nach dem Handshake-Verfahren erklären (Bilder 12.2 und 12.3).
IEC - Bus (Instrumentierungsbus)
Der IEC-Bus ist eine international gültige Schnittstellen-Norm für die Kommunikation zwischen
Geräten unterschiedlicher Hersteller und verschiedener Funktionen:
{ USA
{ Europa
IEEE-Standard 488-1978,
IEC-Norm 60.22, kurz IEC-Bus-Norm.
Bis auf die Festlegung des Anschlußsteckers sind beide Normen identisch; die Signalnamen und
ihre Bedeutung zeigt Bild 12.2. Es stehen hochintegrierte Schaltkreise zur Verbindung zwischen
dem IEC-Bus und einem Microcomputerbus zur Verfügung, z.B. GPIA MC 68488 von Motorola
(GPIA - General Purpose Interface Adapter).
12. Bussysteme, Schnittstellen
CONTROLLER
1
3
TALKER / LISTENER
TALKER / LISTENER
2
n
....
8
DIO1 ...DIO8
DAV
NDAC
VRFD
EOI
n ≤ 15
8
8
ATN
REN
IFC
SRQ
Datenbus
DIO
Data Input/Output
8 Datenleitungen zur Übertragung von Daten und Adressen
Data valid
Not Data Accepted
Not Ready For Data
Daten auf dem Bus sind gültig
Daten übernommen, negiert
Bereit zur Datenannahme, negiert
ATN
SRQ
EOI
Attention
Service Request
End OR Identify
REN
Remote Enable
Achtung: Controller bestimmt Daten-/Befehlsmode
Bedienungsruf: Bedienanforderung, z.B. Datenabruf
Ende oder Identifizieren: Ende einer Blockübertragung oder
Identifizierung eines SRQ-Rufes (mit ATN)
Fernsteuerungsfreigabe: Sperre der lokalen Bedienungsfunktion
IFC
Interface Clear
Schnittstellensystem in Grundstellung bringen
Übergabebus
DAV
NDAC
NRFD
Steuerbus
{ Das Bussystem arbeitet mit negativem Signalhub (Negativ-true Logik), mit Ausnahme der Signale
DAC und RFD. Diese benötigen für eine UND-Verknüpfung den High-Zustand.
Bild 12.2: IEC-Bussystem, Signalbezeichnungen /1, 7/
DIO
H
2
L
DAV
9
1
4
NRFD
3
NDAC
2
3 4 5
11
7
5
10
6
1
Daten
Daten gültig
12
8
6 7 8
9
10 11 12
Bild 12.3: Zeitlicher Ablauf bei 3-Draht-Handshake
Nicht bereit zur
Datenübernahme
Daten nicht
übernommen
t
4
12. Bussysteme, Schnittstellen
12.3 Serielle Schnittstelle, serielle Datenübertragung
12.3.1 Serielle Datenübertragung
Der Datenaustausch zwischen Einheiten/Geräten erfolgt auf der Grundlage von Regeln, welche die
Funktionen zwischen den einzelnen Systemkomponenten beschreiben und festlegen (Busprotokoll).
Gleichzeitig müssen auch die elektrischen Eigenschaften der Verbindungsleitungen definiert sein.
{ Die Schnittstelle (Interface) bestimmt die physikalischen Eigenschaften der Schnittstellenleitungen, wie sie bezeichnet werden und welche Signale an der Übergabestelle ausgetauscht
werden.
Eine serielle Datenübertragung benötigt nur eine kleine Anzahl von Verbindungsleitungen. Das ist
insbesondere bei Datenübertragungen über große Entfernungen und/oder bei galvanischer Trennung
von Sender und Empfänger von Bedeutung. Bei kurzen Übertragungsstrecken wird eine serielle
Übertragung verwendet, wenn die geringe Übertragungsgeschwindigkeit bzw. Baud-Rate nicht stört
(Drucker, Bildschirmterminal).
Prinzip der seriellen Datenübertragung:
Eine serielle Datenübertragung läßt sich mit Hilfe paralleler E-/A-Schaltungen und entsprechender
Software über Parallel-Serien-Wandlung und anschließende Serien-Parallel-Wandlung realisieren.
Das Datenwort wird dazu nach jedem Ausgabeschritt per Software um eine Stelle verschoben. Zur
Eingabe wird das Datenwort durch schrittweises Verschieben und Addition aus der ankommenden
Bitfolge zusammengesetzt. Für jedes einzelne Bit sind mehrere Rechenschritte notwendig, so daß
diese Software-Realisierung einer seriellen Datenübertragung extrem langsam ist.
Bevorzugt wird eine Hardware-Realisierung, bei der die Parallel-Serien-/Serien-Parallel-Wandlung
durch spezielle, anwenderprogrammierbare Interfaceschaltkreise erfolgt (USART - universal
synchronous asynchronous transmitter receiver).
Außerdem lassen sich dabei vom Anwender u.a. Betriebsart (synchron, asynchron), Zeichenlänge,
Anzahl der Stopbits, Baudrate, Parität (gerade, ungerade) programmieren.
{ Schaltkreise, die nur für asynchrone serielle Datenübertragung geeignet sind, heißen UART
oder ACIA (Asynchronous Communications Interface Adapter).
12.3.2 Asynchrone und synchrone Datenübertragung
Ein zentrales Problem der seriellen Datenübertragung ist die Synchronisation zwischen Sender und
Empfänger. Damit der Empfänger die zeitlich nacheinander eintreffende Information (Bitfolge)
korrekt erkennen kann, muß der Zeitpunkt zur Abtastung der Bitfolge festgelegt werden.
Eine exakte Synchronisation ist möglich, wenn der Sendetakt zum Empfänger geführt wird.
Aus Aufwandsgründen wird darauf meist verzichtet und ein eigener Empfängertakt realisiert. Der
Empfänger tastet dabei jedes ankommende Bit etwa in der Mitte der Bitzeit ab (Bild 12.4).
Ist die Taktfrequenz wesentlich größer als die Baudrate, können Toleranzen in der Phasenlage von
Sender- und Empfängertakt nicht zu Fehlinterpretationen führen.
Damit der Empfänger Beginn und Ende der Übertragung eines Zeichens bzw. eines Datenblockes
eindeutig erkennt, werden die zu übertragenden Daten durch Sonderzeichen "eingerahmt" (framed):
{ Startbit, Stopbit(s), SYNC-Zeichen.
12. Bussysteme, Schnittstellen
5
Bild 12.4 c) zeigt die serielle Bitfolge bei Übertragung eines ASCII-Zeichens.
Takt
serielle Daten
Startbit
Abtastzeitpunkte
1
0
0
1
1
0
Datenwort
a) Abtastung in der Mitte der Bitzeit
Startbit
Zeichen 1
Breaksignal
Zeichen 2
b) Trennsignal zwischen aufeinanderfolgenden Zeichen
Übertragungsrahmen
1 2 3 4 5 6 7 8 9 10
7 Datenbits
(ASCII-Zeichen )
nächstes
Startbit
c) Übertragung eines ASCII-Zeichens mit Start-, Paritäts- und Stopbit
Bild 12.4: Synchronisation bei serieller Datenübertragung
Asynchrone Übertragung
Jedes übertragene Zeichen wird durch ein Startbit ("1"), mindestens ein Stopbit (meist "0", typisch
sind 1, 1 12 oder 2 Stopbits) und ggf. ein Paritätsbit eingerahmt (Bild 12.4).
{ Diese Zeichen fügt der Peripherieschaltkreis automatisch in den Datenstrom ein!
In der Pause zwischen zwei aufeinanderfolgenden Zeichen wird vom Sender ein kontinuierlicher
H-Pegel (Break-Signal) erzeugt (Bild 12.4 b). Damit wird die Vorderflanke (HL) eines folgenden
Startbits stets eindeutig erkannt.
Bei asynchroner serieller Datenübertragung sind Sender- und Empfängertakt nicht synchronisiert,
sondern nur ungefähr auf die gleiche Frequenz eingestellt (! 3%). Es können deshalb auch nur
relativ kurze Datenblöcke zwischen zwei Synchronisationszeichen übertragen werden (Toleranzen,
Fehlinterpretation).
{ Typisch wird die Taktfrequenz wesentlich höher als die Baudrate gewählt.
6
12. Bussysteme, Schnittstellen
Beispiele /1, 7/:
1) Übertragung von ASCII-Zeichen (vgl. Bild 12.4)
7 Datenbits, 1 Paritätsbit, 1 Start- und 1 Stopbit.
2) Fernschreibcode CCITT Nr.2
1 Startbit, 5 Datenbits, 1 12 Stopbits, Baudrate 50 Baud ( bit/sec).
3) Datenaufzeichnung auf Kassettenrecorder mittels "Bursts".
Jede Bitzeit wird in drei Abschnitte zerlegt:
1. Drittel
Burst (1-Signal),
2. Drittel
Daten (Burst = 1, kein Burst = 0),
3. Drittel
Pause (kein Burst).
4) Kansas-City-Standard (Kassettenrecorder)
(Startbit - 4 Impulse, Null - 1200 Hz, Eins - 8 Impulse, 2 Stopbits - 2400 Hz, acht Datenbits).
Synchrone Übertragung
Bei synchroner serieller Datenübertragung erhalten alle Teilnehmer die gleiche Taktfrequenz bzw.
der Taktgenerator im Empfänger wird auf das ankommende Signal synchronisiert.
{ Dazu wird eine kontinuierliche, ständige Sendung von Daten gefordert.
Der Sender gibt bei jedem Taktsignal ein Datenbit ab (Bitrate = Taktfrequenz). Zu Beginn eines
Datenblocks werden 1 oder 2 SYNC-Zeichen gesendet (Bitfolge, die nicht als Dateninformation
auftritt). Der Empfänger erkennt im Suchbetrieb (Hunt-Mode) das bzw. die SYNC-Zeichen und
beginnt mit der Interpretation der einlaufenden Datenbits. Damit der Synchronbetrieb auch bei
Datenlücken erhalten bleibt, generiert der Interface-Schaltkreis automatisch SYNC-Zeichen und
sendet sie. So kann sich der Empfängertakt immer synchronisieren (PLL-Schaltungen).
12.4
Einheitliche serielle Schnittstellen
Zur Vereinfachung des Interfaces in Übertragungssystemen, insbesondere zur Rechner-Rechnerund Rechner-Peripheriegeräte-Kopplung, wurden mehrere einheitliche Schnittstellen entwickelt.
Damit gelingt auch die problemlose Kopplung von Geräten unterschiedlicher Hersteller.
12.4.1 RS 232C-, V.24-Schnittstelle
Eine weitverbreitete Schnittstelle für serielle Datenübertragung mit geringer Baudrate [ 19,6 kbit/s
und für Entfernungen bis maximal 15 m (wegen Massenschleifen !) ist die V.24-Schnittstelle.
Ihre genaue Beschreibung ist in Normen festgelegt (DIN 66020, 66259, CCITT V.24 und V.28,
EIA RS 232 C). Sie enthalten u.a.
Stiftbezeichnung der Steckverbinder,
elektrische Signaleigenschaften der Signalquelle (Leitungstreiber)
elektrische Signaleigenschaften der Signalsenke (Leitungsempfänger),
Funktion der Schnittstellenleitungen,
L-Signal (logisch 1) −15 V [ U ÜL [ −3 V ,
H-Signal (logisch 0) +3 V [ U ÜH [ 15 V .
{ Die V.24-Schnittstelle beschreibt Daten in negativer und Steuersignale in positiver Logik !
12. Bussysteme, Schnittstellen
7
Die V.24-Schnittstelle hat neben den zwei Signalleitungen (TXD, RXD) zusätzlich sechs Steuerleitungen, die zur Steuerung des Informationsaustausches verwendet werden können.
Die Bezeichnung und sinngemäße Bedeutung der V.24-Signale zeigen Tafel 12.1 bzw. Bild 12.5.
{ Die Steuersignale DCD und RI haben nur für Modems (Modulator/Demodulator) Bedeutung.
Stift
Symbol
Signalname
Bedeutung
1
PGND
Power Ground
Leistungsmasse (Schutzerde)
2
TXD
Transmit Data
Sendedaten von DEE
3
RXD
Receive Data
Empfangsdaten für DEE
4
RTS
Request to Send
DEE empfangsbereit
5
CTS
Clear to Send
DÜE empfangsbereit
6
DSR
Data Set Ready
DÜE betriebsbereit
7
SGND
Signal Ground
Signalmasse
8
DCD
Data Carrier Detected
DÜE hat Verbindung erkannt
20
DTR
Data Terminal Ready
DEE betriebsbereit
22
RI
Ring Indicator
DÜE hat Rufzeichen erkannt
Tafel 12.1: Bezeichnung und Bedeutung der V.24-Signale
Mit den Steuersignalen RTS und CTS können die Teilnehmer angeben, ob sie empfangsbereit sind.
{ Die Steuersignale DSR und DTR haben eine ähnliche Funktion und werden manchmal auch
anstelle von RTS und CTS für Handshake-Betrieb eingesetzt.
Bei der Verbindung von V.24-Schnittstellen muß beachtet werden, ob es sich bei den Teilnehmern
um DEE (Terminals, Drucker, Rechner) oder um DÜE (Modems, Rechner) handelt.
{ Datenendeinrichtung DEE:
TXD-Signal ist Ausgang,
{ Datenübertragungseinrichtung DÜE: TXD-Signal ist Eingang.
Bei Verbindung von gleichartigen V.24-Schnittstellen (z.B. DEE-DEE) müssen korrespondierende
Signale vertauscht werden (spezielles Kabel oder universeller Null-Modem als Adapter).
Bei Nichtbenutzung der Steuersignale müssen die entsprechenden Eingänge auf H-Pegel liegen.
Das gelingt am einfachsten, indem sie mit einem Ausgang (RXD, DTR) kurzgeschlossen werden.
{ Die Datenübertragung läßt sich so mit nur 3 Leitungen realisieren (Bild 12.5).
Ein Handshake-(Quittungs-)Betrieb ist durch das sogenannte "X-on/X-off-Protokoll" möglich.
{ Dazu werden ASCII-Sonderzeichen zum Stoppen des Senders (DC 3 = 13HEX = 19DEZ) bzw.
zum Wiedereinschalten des Senders (DC 1 = 11HEX = 17DEZ) über die Datenleitungen TXD
und RXD übertragen.
8
12. Bussysteme, Schnittstellen
PGND
TXD
RXD
RTS
CTS
DSR
SGND
DCD
DTR
1
2
3
4
5
Transmit
Receive
Request
Clear
6
7
8
20
Rechner
- mit Nutzung der Steuerleitungen
RXD
TXD
RTS
CTS
DSR
DCD
DTR
SGND
2
3
4
5
6
8
20
7
1
Power Ground
Data
Data
to Send
to Send
Data set Ready
Signal Ground
Data Carrier Detected
Data Terminal Ready
2
3
4
5
6
7
8
20
PGND
TXD
RXD
RTS
CTS
DSR
SGND
DCD
DTR
Kreuzung
im Kabel
Terminal
2
3
4
5
6
8
20
7
TXD
RXD
RTS
CTS
DSR
DCD
DTR
SGND
- ohne Nutzung der Steuerleitungen bei parallelem Kabel (nur 3 Leitungen !)
Bild 12.5: Kopplung eines Rechners an ein Terminal mit einer V.24-Schnittstelle /1/
RS-232-Schnittstellenbausteine
Die Hardware-Realisierung einer RS-232-Schnittstelle einschließlich Pegelumsetzung gelingt mit
einfachen diskreten Lösungen (vgl. Abschnitt 8). Es gibt dafür auch integrierte Schaltkreise, die
neben den Empfängern und Sendern und der notwendigen Pegelumsetzung intern zusätzlich
Gleichspannungswandler, meist nach dem Ladungspumpenprinzip, enthalten.
Sie benötigen deshalb typisch nur einen Betriebsspannungsanschluß und je nach Typ keine oder nur
wenige externe Elemente (Kondensatoren).
Zur Anpassung an die unterschiedlichen Anwenderforderungen werden zahlreiche Modifikationen
von RS-232-Schnittstellenbausteinen von Herstellern angeboten. Sie betreffen insbesondere den
Schutz der Bausteine gegen elektrostatische Entladungen (ESD), die Eigenschaften und Kennwerte
bei Batteriebetrieb (+3 V-Versorgungsspannung, minimale Stromaufnahme - Shutdown-Betrieb)
sowie die einfache Realisierung einer galvanischen Trennung.
ESD-Schutz
Im Laufe der Jahre hat sich gezeigt, daß ein großer Teil der Ausfälle integrierter Schaltkreise auf
Beschädigungen durch elektrostatische Entladungen zurückzuführen ist. Die Hersteller betreiben
einen hohen Aufwand, um ihre Bausteine durch geeignete Eingangsschutzschaltungen gegen eine
Zerstörung infolge ESD zu schützen. Zur Überprüfung der Empfindlichkeit integrierter Schaltkreise
gegen ESD wurden verschiedene Schädigungsmodelle entwickelt, z.B. das Human-Body-Modell
und Modelle für direkte Entladung bzw. Entladung über Luftspalt nach IEC801-2.
Große Akzeptanz findet das sogenannte Human-Body-Modell (C = 100 ... 200 pF, Rü > 1 kΩ).
12. Bussysteme, Schnittstellen
9
ESD-Schutz, Modell
Typ
Betriebsspannung
Anzahl
Treiber /
Empfänger
V
µF
MAX202E
MAX211E
+ 4,5
2/2
4/5
MAX213E
bis
4/5
MAX232E
+ 5,5
MAX241E
externe
C 's
4 x 0,1
Datenrate aktive Empfänger Human
im
Body
Shutdown-Betrieb
kBit/s
kV
0
0
120
±15
2
2/2
0
4/5
0
direkte
Entl.
Entl. über
Luftspalt
kV
kV
±8
±15
Tafel 12.2: RS-232-Schnittstellenbausteine mit ±15 kV ESD-Schutz (Quelle: SE / MAXIM)
Zum Schutz der Schnittstellen-Bausteine gegen Überspannungen bzw. ESD können prinzipiell auch
die bekannten Begrenzerschaltungen mit Dioden oder Varistoren verwendet werden. Speziell für
den Einsatz in seriellen Schnittstellen werden dafür Diodenbausteine angeboten (Bild 12.6). Damit
kann die Anzahl diskreter Bauelemente, einschließlich Bestückungsaufwand, reduziert werden.
Transceiver 1
Transceiver 2
UART
UART
1
2
Prinzip des Schnittstellenschutzes mit Transceiver, z. B. MAX 232
GND
EA1
EA2
:
:
:
EA8
GND
1
20
2
19
3
18
9
10
12
11
GND
EA1
EA2
:
:
:
EA8
GND
Transil - Baustein TH6P04
von SGS Thompson
zu Treiber
oder
Empfänger
GND
TXD
RXD
CTS
RTS
DCR
SGND
DCD
DTR
Schutz einer RS-232-Schnittstelle
mit Transil - Baustein TH6P04
Bild 12.6: Schutz einer seriellen Schnittstelle gegen elekrostatische Entladungen (ESD)
(Quelle: elektonik.industrie 2.1990)
10
12. Bussysteme, Schnittstellen
Batteriebetrieb mit +3 V - Versorgungsspannung
Bei batteriebetriebenen Geräten stehen die Probleme "Miniaturisierung der Stromaufnahme" und
kleine Versorgungsspannung im Vordergrund. Für die RS-232-Schnittstellenbausteine bedeutet das,
bei +5 V- bzw. +3 V-Versorgungsspannung die Mindestforderung nach einem Ausgangsspannungshub von ± 5 V zu gewährleisten. Dazu kommen Forderungen wie kleine Stromaufnahme (< 1 mA,
typisch < 300 µA) und geringe Kapazitätswerte (0,1 µF) für die Kondensatoren der internen
DC-DC-Spannungswandler nach dem Ladungspumpenprinzip.
Beispiele für RS-232-Schnittstellenbausteine mit einem recht großen Betriebsspannungsbereich
+3 V [ U CC [ +5, 5 V zeigt Tafel 12.3. Gemeinsame Kennwerte der angegeben Bausteine sind eine
typische Stromaufnahme von 300 µA, eine garantierte Datenrate von 120 kbit/s und der Einsatz von
4 externen Kondensatoren mit je C = 0,1 µF.
Typ
Sender / Empfänger aktive Empfänger
bei Shutdown
spezielle Eigenschaften
MAX3222
2/2
2
0,5 mA ICC , echte RS-232
MAX3232
2/2
0
pinkompatibel zu Industriestandard MAX232
MAX3241
3/5
2
komplette serielle Schnittstelle,
Betrieb einer Maus möglich
Tafel 12.3: RS-232-Schnittstellenbausteine mit Betriebsspannungsbereich +3 V [ UCC [ +5,5 V
Shutdown- und Auto-Shutdown-Betrieb
Die Lebensdauer einer Batterie ist stark von ihrer Strombelastung abhängig. Zur Minimierung der
Stromaufnahme von Schnittstellenbausteinen bei Batteriebetrieb werden diese in den Schlafzustand
(Shutdown) gesteuert. In diesem Zustand einer kleinen Verlustleistung beträgt die Stromaufnahme
typisch nur etwa 1 µA. Bei modernen Schaltkreisen erfolgt die Umschaltung automatisch und
unabhängig von einer Anwendersoftware, wenn an den Empfängern kein gültiges RS-232-Signal
anliegt (Auto-Shutdown-Betrieb).
Bei entsprechenden Schaltkreisen von MAXIM (Tafel 12.4) werden dazu die Eingänge mit einem
internen Detektor überwacht. Sind in einem Zeitraum von 10 µs die RS-Signale kleiner als ± 1 V,
werden sie als ungültig erklärt. Bei ordnungsgemäßer Datenübertragung sinkt in Zeitabständen
unter 10 µs der Signalpegel nicht unter den Spannungswert von ± 1 V.
Der Detektor meldet das Ergebnis der Überwachung zum Stromversorgungsteil des Bausteins und
steuert diesen ggf. in den Schlafzustand. Die Stromaufnahme wird dabei auf 1 µA reduziert. Wird
vom Detektor ein gültiges RS-Signal erkannt, so wird bzw. bleibt die Stromversorgung aktiv und
die Datenübertragung kann erfolgen.
Typ
BetriebsspannungsBereich
Sender/
Empfänger
V
externe C's
garantierte
Datenrate
Ruhestrom im
Shutdown-Betrieb
µF
kbit/s
µA
MAX3212
+2,7 bis +3,6
3/5
0,33/0,68
230
1
MAX3218
+1,8 bis +4,25
2/2
0,33/0,68
230
1
MAX3223
+3,0 bis +5,5
2/2
4 x 0,1
120
1
MAX3243
+3,0 bis +5,5
3/5
4 x 0,1
120
1
Tafel 12.4: RS-232-Schnittstellenbausteine mit Auto-Shutdown-Betrieb (Quelle: SE /MAXIM)
12. Bussysteme, Schnittstellen
11
RS-232-Schnittstellenbausteine mit galvanischer Trennung
Zur Realisierung der galvanischen Trennung bei RS-232-Schnittstellen werden spezielle Bausteine
angeboten, besonders interessant ist der Transceiver-Modul MAX252. Dieser Schaltkreis enthält
neben 2 Empfängern und 2 Sendern auch die Optokoppler und eine isolierte Spannungsversorgung
(Transformator). Er ermöglicht so eine einfache galvanische Trennung für die Steuerleitungen der
Schnittstelle (Bild 12.7).
{ Ein vollständiger Isolationsadapter für existierende V.24- (RS-232-) Interfaces kann so mit
nur zwei Schaltkreisen und einer 5V-Versorgung ohne weitere externe Bauelemente realisiert
werden.
DC-DC-Wandler
1
+5V
5
7
3 SHDN
V+
TD
3
4
isolierte
Stromversorgung
U CC
8 T1 IN
T1 OUT 36
R1
TD
19
RTS
RD
20
R2
7 T2 IN
T2 OUT 35
11 EN
5
RTS
2
1 R1OUT
R1 IN
1
12 R2OUT
R2 IN
T1
13
34
RD
CTS
CTS 18
T2
C212
16
11
17
C2+
15 GND
10
6
1
9
MAX 233
9
15
6
17
18
14
20
13
10
16
19
MAXIM
MAX 252
27
26
28
24
29
23
30
21
38
25
22
33
13
ISO-GND
Bild 12.7: RS-232-Isolationsadapter mit nur einer Versorgungsspannung (Quelle: MAXIM)
12
12. Bussysteme, Schnittstellen
12.4.2
Schnittstellen nach der RS - 422/485-Norm
Für höhere Datenraten und größere Entfernungen als sie die V.24-Norm zuläßt, wurden zunächst
zwei Normen entwickelt:
{ RS-423 A, CCITT V.10:
{ RS-422 A, CCITT V.11:
unsymmetrische Schnittstelle für maximal 300 kbit/s bei 30 m,
symmetrische Schnittstelle für maximal 2 Mbit/s (60 m),
(Reduktion auf 100 kbit/s bei 1200 m Leitungslänge)
Eine Weiterentwicklung für echten Busbetrieb ist die RS-485-Norm (1983). Sie gestattet den
Anschluß von maximal 32 Treibern und 32 Empfängern an einen Bus und erfüllt die RS-422-Norm.
Spezielle Interface-Schaltkreise für diese Norm sind auf dem Markt (Bild 12.8).
Steckverbinder (9-polig)
1
6
B
Rt
5V
SD
A
SD
5V
2
D1
RS - 422
B
7
ED
ED / SD
Rt
A
3
8
D2
DTR
UCC
100 Ω
RS - 485
4
9
5
RES
+
SGND
RES
+
Stromversorgung
Transceiver z . B. SN 75176, DS 3695
empfangsbereit
Station sendet Daten
1. Zeichen
2. Zeichen
empfangsbereit
Empfang
SD
ED
DTR
0 1 23 45 6 P 12
Datenbit
Stop
Start
BUS
Bild 12.8: Kombinierte RS-422/RS-485-Schnittstelle; Zeitdiagramm der Datenübertragung
12. Bussysteme, Schnittstellen
13
Die Realisierung eines einfachen Isolationsadapters für die RS-485-Schnittstelle gelingt u.a. mit
den Bausteinen MAX1480 nach Bild 12.9.
Typ
Betriebsspannung
Datenrate
MAX1480A
Stromaufnahme
normal
Shutdown
Isolierspannung
2,5 MBit/s
+ 4,5 V ... + 5,5 V
MAX1480B
UIN
Treiber/
Empfänger
0,25 MBit/s
1/1
10 mA
1 µA
1,5 kV
U CC
+5 V
1 : 1,3
ISO 5 V
D1
MAX253
0,1 µF
D2
GND
DI
MAX 483/5
A
R
DE
RS - 485 - BUS
B
D
R0
z. B. 74 HC 04
MAX1480
Bild 12.9: RS-485-Isolationsadapter mit einfacher Stromversorgung (Quelle: SE / MAXIM)
Auch für die RS-485-Schnittstelle werden Bausteine mit einer +3 V-Versorgung angeboten. Meist
verfügen sie zusätzlich über eine Begrenzung der Anstiegsrate der Ausgangsspannung (Slew rate),
um Leitungsreflexionen zu unterdrücken (Tafel 12.5).
Typ
Datenrate
in MBit/s
Betriebsspannung
Halb-/VollDuplex
Slew rate
begrenzt
Standard
Pinout
MAX3483
MAX3485
0,25
10
3,0 V
Halb
ja
nein
75176
75176
MAX3486
2,5
bis
ja
75176
MAX3488
0,25
ja
75179
MAX3490
10
nein
75179
MAX3491
10
nein
75180
+3,6 V
Voll
Tafel 12.5: RS-485-Schnittstellenbausteine mit +3 V-Versorgungsspannung
14
12. Bussysteme, Schnittstellen
12.5
Schnittstellenvergleich
Einen Vergleich im Überblick zeigen Tafel 12.6 und Bild 12.10 anhand der spezifischen Kennwerte
verschiedener standardisierter serieller Schnittstellen.
Schnittstelle
RS-232-C
Übertragungsart
RS-423-A
asymmetrisch asymmetrisch
RS-422-A
RS-485
symmetrisch
symmetrisch
zulässige Anzahl Treiber
1
1
1
32
zulässige Anzahl Empfänger
1
10
10
32
19,6 kBit/s
100 kBit/s
10 MBit/s
10 MBit/s
15 m
1200 m
1200 m
1200 m
± 25 V
±6V
(-0,25 ... 6) V
(-7 ... 12) V
(3 ...7) kΩ
> 450 Ω
> 100 Ω
> 54 Ω
Signalpegel ohne Last
± 15 V
± 5,4 V
±5V
±5V
Signalpegel mit Last
±5V
± 3,6 V
±2V
± 1,5 V
500 mA
150 mA
150 mA
250 mA
zulässige Eingangsspannung
± 15 V
± 12 V
±7V
(-7 ... 12) V
Empfindlichkeit
±3V
± 200 mV
± 200 mV
± 200 mV
(3 ...7) kΩ
4 kΩ
4 kΩ
12 kΩ
maximale Datenrate
maximale Kabellänge
Treiberausgang
max. zulässige Spannung
zulässige Last
max. zulässiger Ausgangsstrom
Empfänger
Widerstand
Tafel 12.6: Vergleich von Schnittstellen
l
m
Übertragungsstrecke
1200
1000
RS-485
RS-422-A
RS-423-A
100
RS-232-C
10
1k
10 k
100 k
1M
10 M
d
Bit/s
Übertragungsrate
Bild 12.10: Übertragungsrate und Übertragungsstrecke serieller Schnittstellen
(Bei Angaben in "Feet" gilt die Umrechnung 1 ft = 30, 48 cm)
Technische Universität Ilmenau
Fakultät für Informatik und Automatisierung
Institut für Theoretische und Technische Informatik
Fachgebiet Methodik des Hardwareentwurfs
Übungsaufgaben zur Lehrveranstaltung
Analoge und Digitale Schaltungen
Studiengang Elektrotechnik/Automatisierungstechnik
Teil: Digitale Schaltungen
von Dr.-Ing. Norbert Hirt
Übungsaufgaben Digitale Schaltungen
ü1
(OHNWURQLVFKH6FKDOWHU
$ Für die Schaltstufe in Bild A2.1 sind der Basiswiderstand RB für einen Übersteuerungsfaktor
m = 10 und der Lastwiderstand RL für UaH ≥ 0,5 . UCC zu bestimmen. Weiter sind folgende Größen
gegeben: UCC = 5 V, RC = 5 k, UeH = 1,5 V, BN = 100, UBEX = 0,6 V, UCEX = 0,2 V, ICY = 0.
$Bestimmen Sie die Übertragungskennlinie UCE = f (Ug ) für 0 > U g > 2 V der Schaltstufe in
Bild A2.2, wenn folgende Werte gegeben sind: RC = 1k, Rg = 10 k, UCC = 10 V, UCEX = 0,3 V,
UBEX = 0,8 V, BN = 100 , ICY = 0. Wie groß muß der Spannungssprung U g min am Eingang sein,
damit bei Schalterbetrieb der Transistor sicher umschaltet (Übersteuerungsgrenze)?
$ Bestimmen Sie für die in Bild A2.3 gezeigte Schaltstufe mit UCC = 5 V die Widerstände
sowie die Spannung UBE2Y im Sperrzustand von Transistor T2. Dabei soll RC1 = RC2 realisiert
werden. Für beide Transistoren gelte: ICX = 8 mA, m = 4, BN = 80, UCEX = 0,2 V, UBEX = 0,8 V,
ICY = 0. Geben Sie schaltungstechnische Lösungen zur Erhöhung der Sperrsicherheit an!
UCC
RC
UCC
RC
RB
0V
Ua
RB
T1
T2
Ua
Ug
0V
Bild A2.1
RC2
RC1
Rg
RL
Ue
UCC
Ua
Ue
0V
Bild A2.2
Bild A2.3
$ Bestimmen Sie für die kapazitiv belastete Transistorschaltstufe in Bild A2.4 den Zeitverlauf
der Spannung UCE(t) für den Ein- und Ausschaltvorgang und skizzieren Sie diesen qualitativ. Der
Transistor selbst werde als trägheitslos angenommen und durch seine Schaltwiderstände rCEx , rCEy
beschrieben. Dabei gelte rCEx << RC << rCEy ; UCC = 5 V.
U CC
R
C
RB
R3
L
Ue
R
2
C
R1 = 470 k , R2 = 68 k
Bild A2.4
Ue
V
a
10
C
Ue
1
R1
IB
UB = + 15 V
G1
UI
Ua
10
40 50
t
ms
Bild A2.5
$ Eine regelmäßige Impulsfolge Ue soll mit einer Schaltung nach Bild A2.5 überwacht werden.
Bei ungestörter Impulsfolge soll am Ausgang a High-Signal, bei Ausfall eines Eingangsimpulses
soll Low-Signal entstehen. Der CMOS-Negator G1 habe einen vernachlässigbaren Eingangsstrom
und eine Eingangsschwellspanung UIS = 0,5 . UB . Bestimmen Sie unter diesen Bedingungen die
Aufladezeit und daraus den Widerstand R3 für einen Kondensator mit C = 100 nF. Für den
Transistor werde vereinfachend UCEX = 0, rCEX = 0, rCEY G angenommen.
ü2
Übungsaufgaben Digitale Schaltungen
$ Erklären Sie die Wirkung einer Schottky-Diode mit UF O 0,4 V als $QWLVlWWLJXQJVGLRGH in
schnellen Logikschaltungen. Ermitteln Sie dazu eine geeignete Relation für die Stromverstärkung
I
B S = Cx der Anordnung Diode-Transistor in Bild A2.6 bei gesättigtem Transistor.
I
Bx
$ Die Dioden-UND-Schaltung in Bild A2.7 soll für eine maximale Anzahl n von Eingängen
ausgelegt werden. Bestimmen Sie nmax für die angegebenen Bauelementewerte /7/. Beachten Sie die
Temperaturabhängigkeit der Sperrströme ISp (Verdopplung je 7 °K Temperaturerhöhung).
Si-Dioden:
UF = 0,45 V, ISP (20 °C) = 100 nA,
Pull-up-Widerstand:
R = 3,3 k (1 ± 0,1),
Lastwiderstand:
RL = 22 k (1 ± 0,1)
Signalquelle:
0 > UeL > 1,5 V ; 8,4 V > UeH > UB
Innenwiderstand:
Riq = 100 Betriebsspannung:
UB = 12 V (1 ± 0,1)
max. Betriebstemperatur: Tmax = 104 °C .
Wie kann schaltungstechnisch der Einfluß der Diodensperrströme ISP verringert werden?
UB
IC
Riq
UF
1
IF
IB
:
:
R
iq D n
I*C
I*B
D1 ISP
n
UBE
R
IR
I RL
I Ln
U
CE
RL
Bild A2.6: Schottky-Transistor
Bild A2.7: Dioden-UND-Schaltung
$ Wie muß der Widerstand R3 in der (TTL-Interface-) Schaltung nach Bild A2.8 bemessen
werden, damit für gesperrten Transistor T am Gattereingang eine L-Spannung UIL > 0,8 V und für
leitenden Transistor T eine H-Spannung UIH ≥ 2 V entsteht?
Für den Gattereingangsstrom Iein gilt: -Iein = IeL > 1,6 mA bei UIL > 0,8 V und Iein
= IeH
< 40 µA
bei UIH ≥ 2 V. Wie groß wird der Strom ICX = f (UCC , Iein , R3 )? Es gilt UCC = 5 V, UCEX = 0,2 V.
U CC
R2
U
R1
e
Iein
a
T
Ue
R3
R
UI
Bild A2.8: TTL-Interface
A1 1
E
A2
≥1
B
T
Y
D
UE
C
Bild A2.9: Impulsschaltung X
R
Ua
Bild A2.10: Induktive Last Übungsaufgaben Digitale Schaltungen
ü3
$ Analysieren Sie die in Bild A2.9 angegebene Impulsschaltung bei sprungförmiger Änderung
des Signales UE an Eingang E und zeichnen Sie die Zeitverläufe der Spannungen an A1, A2 und Y
qualitativ. Wie breit ist der Ausgangsimpuls an Y, wenn (CMOS-) Gatter eingesetzt werden, deren
Eingangs-Umschaltspannung US = 0,5 . UCC sei und deren Eingangsstrom Iein vernachlässigbar
ist? Es soll gelten: UEL = 0, UEH = UCC = 5 V, R = 100 k , C = 100 pF.
Wie ändert sich der Zeitverlauf an Y, wenn statt des NOR- ein NAND-Gatter verwendet wird ?
$ Eine Schaltstufe mit pnp-Transistor soll ein Relais X ansteuern (Bild A2.10). Bestimmen
Sie den Widerstand R in der Schutzschaltung ()UHLODXIGLRGH) so, daß die Abschaltspannungsspitze
den für Transistor T zulässigen Wert UCEmax gerade noch nicht erreicht! Wie groß ist die
Abklingzeit des Laststromes auf 10 % des stationären Wertes? Es sei bekannt:
Relais X: L = 0,2 H, RCU = 0,45 k; TransistorT: UCEmax = - 64 V, UCEX = - 0,4 V,
Diode D: UF > 1 V (Flußspannung); Betriebsspannung UB = +18 V.
$ Ermitteln Sie durch Analyse der *HJHQWDNWVWXIH in Bild A2.11 eine Bestimmungsgleichung
in allgemeiner Form für die Ausgangsspannung UaH bei passiver ohmscher Last RL und für UaL bei
aktiver ohmscher Last RL . Wie groß kann UaH maximal werden, wenn US = UBEX2 = 0,7 V ist ?
Gegeben sind für Transistor T2: UCEX2 , UBEX2 , BN ; für Transistor T1: UCEX1 , ICX1 ; außerdem sind
UCC , R1 , R2 < RL und die Diodenflußspannung UF = US bekannt.
U
R1
U CC
CC
R2
R2
R3
T1
e
a
RaH
T3
T2
e
T2
CL
D
D
U CC
U CC
a
T4
0V
Bild A2.11
R1
Bild A2.12
CL
RaL
0V
Bild A2.13
$ Zeigen Sie durch eine allgemeine Analyse der Gegentaktstufe in Bild A2.12, daß die "hohe"
Ausgangsspannung UaH bei Belastung des Ausganges über RL nach Masse mehr als 1 V unter dem
Wert der Betriebsspannung UCC liegt.
Begründen Sie den Einsatz der Diode D in der Schaltung! Beschreiben Sie die Schaltung dazu für
den Zustand UaL = UCE4x und setzen Sie vereinfachend für alle leitendenden Transistoren die
Kenngrößen UCEX bzw. UBEX als gleich groß voraus.
$ Ermitteln Sie einen allgemeinen Ausdruck zur Bestimmung der G\QDPLVFKH9HUOXVWOHLVWXQJ
einer Gegentakt-Schaltstufe infolge kapazitiver Last CL bei periodischer Ansteuerung der Schaltung
mit einem Eingangssignal der Frequenz f.
/|VXQJVDQVDW] Je Schaltperiode T = 1/f wird der Kondensator CL auf UOH aufgeladen (Leistungsaufnahme) und wieder auf UOL entladen (Bild A2.13).
ü4
Übungsaufgaben Digitale Schaltungen
$ Mit einer Leuchtdiode LED soll der Schaltzustand Low (UCEX > 0,4 V) einer TransistorSchaltstufe angezeigt werden, an die zusätzlich eine DNWLYH/DVWRL angeschaltet ist (Bild A2.14).
Die Betriebsspannung sei UCC = 5 V. Bei Low soll der Laststrom IL = 4 mA sein, der Transistors
kann maximal ICX = 16 mA bei UCEX > 0,4 V aufnehmen. Von der LED sind bekannt: IFmin = 10 mA,
UF > 1,2 V für IF > 20 mA. Bemessen Sie den Widerstand R!
$ Der Schaltzustand Low eines Transistorschalters mit SDVVLYHU/DVWRL soll mit einer LED
angezeigt werden (Bild A2.15). Die Kennwerte für Transistor T, UCC und LED sind Aufgabe A2.14
zu entnehmen. Der H-Pegel der Ausgangsspannung soll UOH P 3,6 V betragen. Bestimmen Sie die
Widerstände R und RL für diese Forderungen !
UCC
R
UCC
T
UO
T
RL
UO
0V
Bild A2.14
Optokoppler
LED
LED
T
0V
R
R
RL
IL
LED
UCC
UO
0V
Bild A2.15
IL
Bild A2.16
$ Der Transistorschalter in Bild A2.16 soll einen Optokoppler ansteuern, außerdem fließt am
Ausgang ein pegelabhängiger Laststrom IL mit IL = + 4,8 mA bei Low-Pegel und -IL = 120 µA bei
High-Pegel. Bei UCC = 5 V sind UCEX > 0,4 V für ICX > 16 mA und UCEY P 3,6 V am Ausgang
gefordert. Für die LED des Optokopplers gilt IFmin = 10 mA, UF = 1,6 V für IF > 20 mA. Bemessen
Sie den Widerstand R für diese Bedingungen!
/RJLVFKH6FKDOWXQJHQ
$ Die Diode D in Bild A3.1 werde durch ihre Fluß- bzw. Schleusenspannung US beschrieben.
Zeichnen Sie den Zeitverlauf U2 (t), wenn dynamisch keine Einschränkungen für die Diode gemacht
werden. Es gilt US = 0,5 V, R = 1 .
UD
U
ID
U1
1
0,5
U1
U2
R
3
-1
Bild A3.1: Gleichstromkreis mit HL-Diode
6
10 12
20
t
Übungsaufgaben Digitale Schaltungen
ü5
$Zeichnen Sie die Übertragungskennlinien Ua = f {U1 } der Diodenschaltungen in Bild A3.2
für 0 > U 1 > U CC = 5V für die Fälle a) U2 = 0 und b) U2 = UCC .
Welche logische Funktion realisieren die angegebenen Schaltungen? Welche Werte kann die
Ausgangsspannung Ua3 einer Kettenschaltung von drei gleichartigen Stufen annehmen?
$Zeichnen Sie die Zeitverläufe der Spannung Ua (t) der Diodenschaltungen in Bild A3.2 für die
Fälle a) U2 = 0 und b) U2 = UCC , wenn für U1 (t) der angegebene Zeitverlauf angenommen wird. Die
Dioden D1 , D2 seien durch ihre Schleusenspannung US = 0,7 V beschrieben und es ist UCC = 5 V.
UCC
D1
D1
R
5
D2
U1
U1
D2
Ua
U2
R
U1
a)
10
Ua
U2
5
20
15
t
-5
b)
Bild A3.2: Diodenschaltungen
$Geben SieORJLVFKH81'2'(59HUNQSIXQJVVFKDOWXQJHQ mit Transistoren (bipolar und
FET) an und vergleichen Sie Ihre Schaltungen mit den in Bild A3.2 gegebenen Diodenschaltungen
(Ströme, Belastbarkeit; Parallel- bzw. Reihentechnik)
$ Gegeben ist ein einfaches Widerstandsnetzwerk nach Bild A3.5. Bestimmen Sie die Ströme
IR1 und IR2 sowie die Spannung U1 für a) Ue1 = 0 und R 2 G , b) Ue1 = Ue2 = 0.
Veranschaulichen Sie die Lösung grafisch in einem I-U-Diagramm.
$ Zeigen Sie durch Darstellung in einem I-U-Diagramm, daß der Transistorschalter der in Bild
A3.6 gegebenen DTL-NAND-Schaltung gesperrt bleibt, wenn mindestens eine der Eingangsspannungen Ue1 , Ue2 Nullpegel hat.
UCC
UCC
R
R
Ue1
R1
I1
UF
IR
Ue1
I2
Ue2
R2
Bild A3.5
U1
Ue2
I1
I2
RC
IR
IB
U1
UO
Bild A3.6: DTL-NAND-Gatter (Prinzip)
ü6
Übungsaufgaben Digitale Schaltungen
,QWHJULHUWH6FKDOWXQJHQ
$ Zeigen Sie durch eine allgemeine Analyse der Ausgangsstufe eines NAND-Gatters der TTLStandard-Reihe 74xx (Bild A4.1), daß die "hohe" Ausgangsspannung UaH bei einer Belastung des
Ausganges über RL nach Masse mehr als 1 V unter dem Wert der Betriebsspannung UCC liegt!
Begründen Sie durch Analyse der Ausgangsstufe die Notwendigkeit der Diode D!
Wieviele TTL-Eingänge der Standardreihe 74 können von dieser Ausgangsstufe JHWULHEHQ werden?
UCC (5 V ± 5%)
R1
4k
R2
1,6 k
R3
130
T3
T1
e
1
e2
UCC
T2
R1
4k
e1
D
a
T4
GND (0 V)
a
Rp
RL
R4
1k
T1
e2
GND (0 V)
Bild A4.1: TTL-Gatter 7400
Bild A4.2
$Für ein Gatter des TTL-Schaltkreises 7400 (4x2E-NAND) sind zu ermitteln:
a) der maximale und minimale (LQJDQJVVWURPIIL bei der Eingangsspannung UeL. Bekannt sind die
Basis-Emitter-Flußspannung UBEF = 0,7 V und eine Widerstandstoleranz von 30% für den inneren
Basiswiderstand R1 (Bild A4.1) ,
b) der (LQJDQJVVWURPIIH bei hohem Eingangssignal UeH ≥ UIH min ; die inverse Stromverstärkung
des Multiemitter-Transistors werde dabei mit BI = 0,01 angenommen (Bild A4.1),
c) der maximale Wert eines 3XOOGRZQ:LGHUVWDQGHVRP zwischen Eingang und Bezugspunkt GND
bei Einhaltung des Logikpegels UeL ≤ UIL max .
$In der (Interface)-Schaltung nach Bild A4.3 wird der pnp-Transistor T über Ue als Schalter
betrieben. Bemessen Sie den Widerstand R 3 so, daß ein TTL-Gatter 7400 angesteuert werden kann.
$ Bestimmen Sie die dynamischen Verlustleistungen Pvdyn eines LS-TTL-Gatters XQG eines
CMOS-Gatters infolge kapazitiver Last CLmin = 100 pF am Ausgang bei Impulsansteuerung mit der
Frequenz f (Bild A4.4)! Vergleichen Sie die Ergebnisse für die Verlustleistung Pv = Pvstat + Pvdyn
beider Gattertypen bei UCC = UDD = 5 V. Die statische Verlustleistung des CMOS-Gatters sei mit
Pvstat = 0 angenommen, die eines LS-TTL-Gatters sei mit Pvstat = 2 mW gegeben.
UCC
R1
R2
Ue
R3
I
I
UCC
RaH
7400
T
UCC
&
Y
CL
UI
GND
Bild A4.3: Interface-Schaltung
CL
RaL
Bild A4.4
Übungsaufgaben Digitale Schaltungen
ü7
$ Mit einer Leuchtdiode LED soll der logische Zustand /RZ des Ausganges eines Gatters des
TTL-Schaltkreises 7400 angezeigt werden. Für dieLED ist bekannt: UF = 1,2 V für IF > 20 mA,
IFmin = 10 mA.Kennwerte für TTL-Schaltkreisevgl. Tafel 4.2.2 im Script zur Vorlesung.
Geben Sie eine Schaltung an und bemessen Sie evtl. notwendige Widerstände! Wieviele TTLGatter können gleichzeitig neben der LED von dem Ausgang Ihrer Schaltung angesteuert werden ?
$ An den Ausgang Y eines TTL-Gatters 7400 soll über einen Optokoppler OK ein CMOSGatter angeschaltet werden (Bild A4.6). Wie ist der Widerstand RV zu bemessen, wenn außerdem
mindestens ein TTL-Eingang von Ausgang Y direkt angesteuert wird?
Für die LED des Optokopplers gelte UF = 1,6 V für IF > 20 mA, IFmin = 6 mA.
$Geben Sie eine H[WHUQH Schutzschaltung für CMOS-Eingänge an und bemessen Sie die dafür
notwendigen Widerstände so, daß die Eingangsspannung der Schaltung Ue = UDD ± 100 V betragen
darf. Für die Grenzwerte der Gattereingangsspannung gilt -1 V < UI < UDD + 1 V bei UDD = 5 V.
+LQZHLV Zur Vermeidung des sogenannten /DWFKXS(IIHNWHVsollte bei CMOS-Schaltkreisen eine
Strombegrenzung auf Werte unter 10 mA an allen Anschlußpins gesichert sein.
OK
UCC
7400
&
R 1
Rv
Y
UDD
CMOS
1
UDD
externe
Schutzschaltung
7400
Y1
Ue
II
U
R
CMOSGatter
I
interne Schutzschaltung
R = (0,2 ... 1) k Ω
zu weiteren Gattern
Bild A4.6: Ansteuerung eines Optokopplers
Bild A4.7: Schutzschaltung für CMOS-Eingänge
$ Nennen Sie Anwendungsfälle für TTL-Schaltstufen mit RIIHQHQ.ROOHNWRUDXVJlQJHQ Welche
Aufgaben hat der notwendige Widerstand RC bei der Zusammenschaltung solcher Ausgangsstufen?
Geben Sie DOOJHPHLQH Bestimmungsgleichungenfür RCmax = f (UOH ) und RCmin = f (UOL ) für den Fall
an, daß n OC-Ausgänge und m gleichartige TTL-Eingänge zusammengeschaltet werden.
Berechnen Sie daraus den zulässigen :HUWHEHUHLFKvon RC für das Beispiel n = 3 und m = 2, wenn
nur Gatter der LS-TTL-Reihe verwendet werden (UCC = 5 V 5%).
Ermitteln Sie die Anzahl mmax = f (RCmin ) anschaltbarer Eingänge und die Anzahl nmax = f (RCmax , m)
parallelschaltbarer OC-Ausgänge bei Ihrer Bemessung !
Für den Reststrom gesperrter Ausgangstransistoren der OC-Gatter bei L-Pegel gelte IOZL O 0, bei
H-Pegel gilt +IOZH > 100 A (abweichend von IOH bei Gegentaktstufen!).
$ Mit TTL-Schaltkreisen 7403 (4 x 2Eingangs-NAND mit Open-Collector-Ausgang), soll ein
Bussystem mit 2 Sendern und 8 Empfängern realisiert werden (Bild A4.9).
Bestimmen Sie dafür den SXOOXS:LGHUVWDQGRC , den Minimalwert des $XVJDQJVSHJHOVUOH und
den maximalen $XVJDQJVVWURPIOL eines Senders für eine Versorgungsspannung UCC = 5 V ± 5%!
Für den Reststrom der Ausgangstransistoren der OC-Gatter gelten die Angaben aus Aufgabe A4.8.
ü8
Übungsaufgaben Digitale Schaltungen
$ Mit TTL-OC-Gattern 7403 soll bei UCC = 5 V ± 5% ein Bussystem mit n Sendern S1 , ... , Sn
und m Empfängern E1 , ... , Em realisiert werden. Gleichzeitig sei ein Optokoppler OK
anzuschließen, für dessen LED UF > 1,5 V für IF > 20 mA gilt (Bild A4.10).
Wieviele Empfänger Em dürfen maximal am Bus angeschlossen werden, wenn für die LED ein
minimaler Flußstrom IFmin = 8 mA einzuhalten ist? Bestimmen Sie den zulässigen Wertebereich für
den Widerstand Rv zahlenmäßig bei n = 4 Sendern und m = 3 Empfängern. Für die Restströme
gesperrter Transistoren gilt IOZL O 0, IOZH > 100 A .
UCC
IoL
RC
IR I
IL
E1
4k
S1
E1
E2
I oZL
UCC
Empfänger
.........
&
OK
Em
&
Rv
S2
:.
:
:
I
BUS
&
&
Em
oZL
S1 .......
Sn
Sn
Sender
n Sender
BUS
m Empfänger
Bild A4.9: Bussystem mit OC-Gattern
Bild A4.10: Bussystem und Optokoppler
$In einem Bussystem mit seriellem Leitungsabschluß (R = Z) werden spezielle Bustreiber mit
7ULVWDWH$XVJDQJVVWXIHQ eingesetzt (Bild A.4.11). Von den Ausgangsstufen dieser Bustreiber sind
folgende Werte bei UCC = 5 V ± 5 % bekannt: UOLmax = 0,55 V, IOLmax = 64 mA, IOH = 0,4 mA und
IOZL = 50 µA (Reststrom bei Tristate und L-Pegel des Bussignals). Für die Eingänge der Bustreiber
und die m Empfängereingänge gelten die typischen LS-TTL-Kennwerte (vgl. Tafel 4.2.2).
Gesucht ist die maximal zulässige Anzahl von Sendern in der Form nmax = f {m} und für n = m bei
einem Wellenwiderstand der Leitung von Z = 220 ± 10% und R = Z .
E1
Empfänger
E2
.....
R
R
E1 ... E m
U CC
Em
BUS
S1
S2
.....
Sn
Sender
S1 ... S n
OE 1
OE 2
OE n
Kennwerte der Busleitung:
U
BUS
GND
Wellenwiderstand Z, Laufzeit τ
Bild A4.11: Bussystem mit Tristate-Schaltkreisen und Leitungsanpassung
Übungsaufgaben Digitale Schaltungen
ü9
.LSSVFKDOWXQJHQ
$ Mit CMOS-Gattern soll eine Schmitt-Trigger-Schaltung nach Bild A5.1 realisiert werden.
D Die Widerstände R1 , R2 sind so zu bemessen, daß der Ausgang der Schaltung (ohne R3 und UV)
bei den Eingangsspannungen UeO = 4 V bzw. UeU = 1 V umschaltet. Die Schaltschwelle der Gatter
liegt bei US = 12 U DD . Im Umschaltpunkt UI = US wird ein Ausgangsstrom | Ia | > 250 µA gefordert,
für die Ausgangspegel der Gatter wird vereinfachend UOL = 0 bzw. UOH = UDD = 5 V angenommen.
E Wie ist Widerstand R3 zu bemessen, wenn mit UV = UDD die Umschaltschwellen der Schaltung
aus Teilaufgabe a) nach U eo = 2V und U eU = − 1V verschoben werden sollen?
$ Ein Schmitt-Trigger mit CMOS-Invertern nach Bild A5.1 soll bei UDD = 10 V für Umschaltschwellen UeO = - UeU = 5 V so realisiert werden, daß drei JOHLFKH Widerstandswerte verwendet
werden können. Bestimmen Sie die dazu notwendige Spannung UV .
$ Der Timer-Schaltkreis 555 soll als Präzisions-Schmitt-Trigger bzw. Hysterese-Komparator
eingesetzt werden. Geben Sie eine dafür geeignete Beschaltung des Schaltkreises an und ermitteln
Sie die Hysterese-Spannung UH Ihrer Anordnung (zur Schaltung des Schaltkreises vgl. Bild A5.6).
R3
R2
R
R1
&
Uv Ue
&
UI
Ua
C
Bild A5.1: Schmitt-Trigger mit Gattern
Ua
UI
BildA5.4: Impulsgenerator
$ Mit einem Gatter des Schmitt-Trigger-Bausteins 74 LS 14 (6 Negatoren, Hysterese-Eingang)
soll ein Impulsgenerator mit einer Frequenz f = 10 kHz nach Bild A5.4 realisiert werden. Der
Widerstand R und die Kapazität C sind zu bestimmen.
Für den Eingangsstrom des Gatters gelte vereinfachend Ie = 0. Für die anderen Kennwerte gilt bei
UCC = 5 V: UOH = 3,8 V, UOL = 0,2 V, IOH > 0,4 mA, IOL > 8 mA, UIO = 1,6 V, UIU = 0,8 V.
Skizzieren Sie die Zeitverläufe der Spannungen UI = UC und Ua qualitativ.
$Mit zwei Gattern des TTL-Schaltkreises 7400 und einem RC-Glied soll ein Monoflop nach
Bild A5.5 realisiert werden. Die Übertragungskennlinie der Gatter wird vereinfachend idealisiert
angenommen (Bild A5.5), für den Eingangsstrom gelte IIL = 1 mA. Bestimmen Sie die +DOWH]HLWtH
der Schaltung für C = 100 nF. Skizzieren Sie die wesentlichen Zeitverläufe qualitativ.
C
&
U e1
Ua1 R
UO
&
e2
D
UOH
U a2
U OL
3,6 V
0,1 V
U = 1,4 V
S
UI
Bild A5.5: Monoflop mit Gattern, idealisierte Übertragungskennlinie der TTL-Gatter
ü10
Übungsaufgaben Digitale Schaltungen
$ Ein Monoflop mit dem Timer-Schaltkreis 555 nach Bild A5.6 a) soll bei UCC = 15 V eine
Haltezeit tH = 100 ms besitzen. Wählen Sie den Ladewiderstand R1 so, daß der Ladestrom IL im
Umschaltpunkt den Wert IL = 0, 25 mA erreicht (Weitere Angaben zum Schaltkreis 555 finden Sie
u.a. in Abschnitt 5: Rückgekoppelte Kippschaltungen).
$ Mit dem Timer-Schaltkreis 555, einem externen Schalttransistor T (UCEX > 0,2 V) und einem
RC-Glied (R1 , C) soll ein UHWULJJHUEDUHV0RQRIORS nach Bild A5.6 b) als Überwachungsschaltung
für eine Impulsfolge am Eingang e realisiert werden. Sie soll das Überschreiten eines maximalen
,PSXOVDEVWDQGHV ti max signalisieren.
Bemessen Sie den Widerstand R1 bei C = 2 µF und UCC = 5 V für einen Impulsabstand ti max = 21 ms.
Skizzieren Sie die wesentlichen Zeitverläufe !
8
4
RESET
R
6
THRESHOLD
≥1
R
5
3
CONTROL
VOLTAGE
OUTPUT
7
R
≥1
S
2
DISCHARGE
Q
TRIGGER
R
1
GND
UCC
8
R1
6
TRIG
C
UCC
8
R1
3
OUT
2 7
4 1
6
e
T
C
TRIG
RES
3
OUT
2 7
41
RES
a) Monoflop mit Timer 555
Bild A5.6: Monoflops mit Timer-Schaltkreis 555
b) retriggerbares Monoflop mit 555
Übungsaufgaben Digitale Schaltungen
ü11
3HJHOXPVHW]XQJ$QSDVWXIHQ
$Wie muß der Widerstand R3 in der LSL-TTL-Interfaceschaltung nach Bild A8.1 bemessen
werden? Welcher Strom IC fließt dann für Ue = 0 durch den pnp-Transistor T ?
15 V
5V
&
T
Ue
&
5V
15 V
R2
R1
LSL
Y
Rp
&
TTL
&
R3
UI
Y1
Y2
zu weiteren Gattern
LSL
TTL
Bild A8.1: LSL-TTL-Interface
Bild A8.2: LSL-TTL-Interface
$Zur Pegelumsetzung LSL-TTL werden spezielle Pegelumsetzer (z. B. FZH 161 aus Baureihe
FZH von SIEMENS) oder auch LSL-Gatter mit offenem Kollektor verwendet. Als Kennwerte der
Gatter bei UCC = 15 V sei bekannt: UIH P 7,5 V, UIL > 4,5 V, UOL > 0,4 V für IOL > 10 mA und bei
gesperrtem Ausgangstransistor IOZH > 100 µA. Bemessen Sie für die Schaltung in Bild A8.2 den
Widerstand RP , wenn m = 3 TTL-Gatter angesteuert werden müssen!
$Mit einem Gatter des TTL-Bausteines 7401 (4x2E-NAND, OC) sollen CMOS-Bausteine der
Reihe HEF 4000 angesteuert werden (UDD = 5 V, UIH min = 3,5 V, UIL max = 1,5 V, IIL = IIH = 0).
Für das OC-Gatter gelten die typischen Kennwerte der TTL-Standardreihe 74, für die Restströme
bei gesperrtem Transistor wird IOZH = 250 µA bzw. IOZL O 0 angegeben. Der Widerstand RP der
Schaltung nach Bild A8.3 ist zu bemessen!
Die gleiche Aufgabe ist mit dem Baustein 74LS00 zu lösen (4x2E-NAND, Gegentaktstufe).
UCC
UCC
&
Rp
&
Y1
Rp
Y1
e1
e1
&
e2
7401
BildA8.3: TTL-CMOS-Interface
CMOS
Y2
e2
&
74 LS 00
CMOS
Y2
ü12
Übungsaufgaben Digitale Schaltungen
$ Bei LSI-Schaltkreisen, z. B. MP-Peripherieschaltkreisen oder Einchip-Mikrorechner Z8, wird
für die Grenzwerte der Eingangspegel UI nur ein Wertebereich von - 0,3 V > UI > UCC + 0,3 V
gefordert. Das leisten die einfachen Diodenschaltungen nach Bild A8.4 a) nicht. Bei geeigneter
Bemessung der Widerstände kann die nach Bild A8.4 b) modifizierte Schaltung verwendet werden.
Erklären Sie die Wirkungsweise der beiden Schaltungen und bestimmen Sie mit den gegebenen
Daten die zulässigen Wertebereiche für die Widerstände R1 und R2 . Stellen Sie Ihre Lösung
grafisch dar.
LSI-Schaltkreis: UCC = 5 V ± 5%, UIL = (- 0,3 ... 0,8) V, UIH = 2,0 V ... UCC + 0,3 V, | I I | > 10 µA.
Komparator:
Uamax = UE = ± 12 V, Iamax = ± 20 mA.
Dioden:
UF
0, 5 V für
I F > 0, 1 mA
=
, I F max = 20 mA
0, 8 V für 0, 1 mA < I F > 20 mA
Wie muß die Bemessung der Schaltung in Bild A8.4 b) qualitativ geändert werden, wenn sie für
einen n-Bit-Parallelbus eingesetzt wird und Mehrfachdioden (für D1 und D2) verwendet werden?
+12 V
U
-
U CC
U CC
E
D1
R1
+12 V
U I LSI
UE
-
+
D4
R1
D1
UI
LSI
+
D2
D2
-12 V
-12 V
D3
GND
Komparator
Komparator
DiodenBegrenzer
a)
R2
b)
Diodenbegrenzer
Bild A8.4: Dioden-Begrenzerschaltungen für LSI-Schaltkreise
$ Bild 8.5 zeigt eine Reset-Schaltung für Prozessoren. Erklären Sie die Wirkungsweise dieser
Anordnung bei Zuschalten der Betriebsspannung UCC und bei Hardware-Reset über Schalter S bzw.
bei Software-Reset über eine Ansteuerelektronik (Gatter G). Bestimmen Sie in allgemeiner Form
die Zeitdauer tRES des Resetzustandes und zeichnen Sie qualitativ den Zeitverlauf der Spannung
UC(t).
UCC
G
R
SoftwareRES
Reset
S
C
HardwareReset
Bild 8.5: Reset-Schaltung