2. Kinematik - TU Chemnitz
Werbung

Mechanik - Kinematik
2.
Kinematik
... ist die Lehre von der Bewegung. Sie beschreibt Bewegungen, ohne nach den Ursachen zu fragen.
2.1.
−
!
Ortsvektor
Der Ort eines Massepunktes P zum Zeitpunkt t wird beschrieben durch den
Ortsvektor r ( t ) mit dem Ursprung 0:
!
Der Ursprung wird entsprechend dem physikalischen Problem zweckmäßig gewählt, z.B.: Abwurfstelle beim Wurf, Rotations-Mittelpunkt bei Rotation.
−
Wenn sich P relativ zu 0 bewegt, ist r = r ( t ) . Die Gesamtheit der Endpunkte
von r heißt Bahnkurve:
−
!
Je nach dem physikalischen Problem wird man r in unterschiedlicher Weise in
Komponenten zerlegen:
im allgemeinen Fall entsprechend den kartesischen Koordinaten:
r = x⋅ i + y⋅ j + z⋅k
(1)
i , j, k ... Einheitsvektoren in x-, y-, und z- Richtung,
2.2.
−
bei einer Rotationsbewegung wird man oft Polarkoordinaten wählen (vgl. <2.4.>).
Geschwindigkeit
... ist die Änderung des Ortsvektors mit der Zeit:
!
9
Mechanik - Kinematik
r (t 2 ) − r (t1 ) ∆r
=
v( t 1 , t 2 ) =
t 2 − t1
∆t
−
(2)
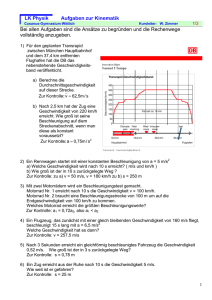
v ist die mittlere Geschwindigkeit im Intervall (t1, t2). Beliebige Eskapaden innerhalb dieses Intervalls (s. Abb.) bleiben unbemerkt/unberücksichtigt!
⇒
Die Momentangeschwindigkeit zu einem bestimmten Zeitpunkt erhält
man durch Grenzübergang t2 → t1:
r (t 2 ) − r (t1 ) dr
=
(t1 ) = r (t1 )
v( t 1 ) = lim
t 2 → t1
t 2 − t1
dt
2.3.
−
(3)
Beschleunigung
... ist die Änderung der Geschwindigkeit mit der Zeit
(„v ist Tangente an die Bahnkurve“):
!
Man sieht, dass sich v im Allgemeinen sowohl im Betrag als auch in der Richtung ändert! Die Beschleunigung ist ein Vektor.
Maßeinheit: [a] =
−
m
!
SI
s2
mittlere Beschleunigung im Intervall (t1, t2):
v(t 2 ) − v( t 1 ) ∆v
a (t 1 , t 2 ) =
=
t 2 − t1
∆t
−
(4)
Analog zu Gl. (3) erhalten wir die (momentane) Beschleunigung zum Zeitpunkt t1:
v ( t 2 ) − v ( t 1 ) dv
d2r
a ( t 1 ) = lim
=
( t 1 ) = 2 (t 1 ) = r ( t 1 )
t 2 → t1
t 2 − t1
dt
dt
−
(5)
2 Grenzfälle der Beschleunigung (bzw. Komponenten im allgemeinen Fall):
a) Tangentialbeschleunigung (tangential zur Bahnkurve)
a ~ ∆v wirkt parallel (o. antiparallel) zu v ( ∆v || v )
⇒
es ändert sich nur v , nicht die Richtung
10
Mechanik - Kinematik
b) Normalbeschleunigung (normal zur Bahnkurve)
a ~ ∆v wirkt senkrecht zu v ( ∆v⊥v )
⇒ es ändert sich nur die Richtung, nicht v
Beispiel:
Auf der Erde unterliegt jeder nicht fixierte Körper einer Beschleunigung.
a ≈ 9,81 m · s-2 ≡ g ... Erdbeschleunigung
⇒
v nimmt zeitlinear zu:
dv
dt
v( t )
⇒
v( t )
m
s2
t
m
= ∫ 9,81 2 dt ′
s
0
= 9,81
= 9,81
m
⋅t
s2
Fallstrecke s:
ds( t )
dt
= v( t )
t
s( t ) = ∫ v( t ′) ⋅ dt ′ = 9,81
0
⇒
t
1s
2s
3s
2.4.
−
s( t ) =
m
s2
t
∫ t ′ ⋅ dt ′
0
9,81 m 2
⋅t
2 s2
v(t)
9,8 m·s-1
19,6 m·s-1
28,4 m·s-1
s(t)
4,9 m
19,6 m
44,1 m
(= 1 · 4,9)
(= 4 · 4,9)
(= 9 · 4,9)
Beschreibung der Kreisbewegung
Bei der Kreisbewegung ist der Abstand r konstant.
⇒
Einführung von Polarkoordinaten zweckmäßig
11
Mechanik - Kinematik
r2 = x 2 + y2
y
y
=
= sin ϕ
r
x 2 + y2
Transformationsgleichungen
{x, y}↔ {r, ϕ}
⇒
Verallgemeinerung: Zylinderkoordinaten (für rotationssymmetrische Probleme)
{x, y, z}↔ {r, ϕ, z}
Nun zur Kreisbewegung (hier ist r = r = const. !):
−
Winkelgeschwindigkeit ω
ω=
−
(6)
Winkelbeschleunigung α
α=
−
dϕ( t )
= ϕ( t )
dt
dω( t ) d 2 ϕ( t )
=
= ϕ( t )
dt
dt 2
Zusammenhang mit Umlaufgeschwindigkeit, -beschleunigung:
s = r⋅ϕ
s = v = r ⋅ϕ = r ⋅ω
s = a = v = r ⋅ω = r ⋅α
−
(7)
(8)
Bis hierher: Rotation in der Ebene. Im 3D betrachtet man ω und α zweckmäßigerweise als Vektoren.
Richtung
→
durch Rotationsebene festgelegt
Beträge:
ω =ω
lt. Gl. (6)
α =α
lt. Gl. (7)
12
Mechanik - Kinematik
Rechte-Hand-Regel!
−
α kann bei gegebener Rotationsrichtung nach oben oder unten zeigen:
α1 ~ ω
α 2 ~ −ω
!
−
→
→
!
Vektorschreibweise von Gl. (8) (dann stimmen Betrag und Richtung):
v = ω× r
"
"
"
a = α× r
"
2.5.
−
Beschleunigung
Abbremsung
"
"
(9)
Überlagerung von Bewegungen
Die Zusammenhänge zwischen Ort, Geschwindigkeit und Beschleunigung gelten für jede Komponente einzeln. Dies erleichtert vieles!
!
z.B. in kartesischen Koordinaten:
= x⋅ i + y⋅ j + z⋅k
$
#
r
v =r
$
$
= x⋅ i + y⋅ j + z⋅k
&
(
'
(
)
%
(
)
)
= vx i + vy j + vzk
*
*
.
0
0
0
/
-
a
*
= r = x⋅ i + y⋅ j + z⋅k
=v
.
,
+
1
1
1
1
1
1
= a x i + a y j + azk
2
2
(1)
2
Beispiel:
(10)
3
Waagerechter Wurf
v0 = vx ⋅ i
4
4
Waagerecht findet eine gleichförmige Bewegung statt (vx = const.) und senkrecht eine
gleichmäßig beschleunigte Bewegung (freier Fall, d.h. a = g = const.), die sich überlagern.
13
Mechanik - Kinematik
Man kann natürlich auch für jeden Zeitpunkt Betrag und Richtung der resultierenden
Geschwindigkeit ermitteln:
v( t )
5
= v 2x ( t ) + v 2y ( t ) = v 2x + g 2 t 2
tan β =
vx
vy
14