Bachelorarbeit Chris Bauer - Geothermie Wiki
Werbung

Hardwareaufbau und
Softwareentwicklung eines
temperaturbeständigen Servoreglers
Bachelorarbeit
für die Prüfung zum
Bachelor of Engineering
Studiengang Mechatronik
Duale Hochschule Baden-Württemberg Karlsruhe
von
Chris Bauer
Abgabedatum:
Bearbeitungszeitraum:
Matrikelnummer, Kurs:
Ausbildungsfirma:
Betreuer der Ausbildungsfirma:
Gutachter der Dualen Hochschule:
12. September 2011
12 Wochen
166070, TMT08B
Karlsruher Institut für Technologie (KIT)
Dr.-Ing. Jörg Isele
Herr Steffen Quadt
Eidesstattliche Erklärung
gemäß § 5 (2) der „Studien- und Prüfungsordnung DHBW Technik“ vom 18. Mai 2009. Ich
habe die vorliegende Arbeit mit dem Thema:
Hardwareaufbau und Softwareentwicklung eines temperaturbeständigen Servoreglers
selbständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel benutzt.
Karlsruhe, den 12. September 2011
Chris Bauer
Sperrvermerk
Die Ergebnisse der Arbeit stehen ausschließlich dem auf dem Deckblatt aufgeführten Ausbildungsbetrieb zur Verfügung.
Chris Bauer
I
Kurzübersicht
Im Rahmen dieser Bachelorarbeit wird ein erster Entwurf eines temperaturbeständigen Servoreglers vorgestellt. Zunächst einmal ist es notwendig, die benötigte Hardware mit einer
geforderten Spezifizierung für bis zu 200°C Umgebungstemperaturen zu erörtern.
Für die Steuerung und Regelung des Servoreglers wird ebenfalls ein temperaturbeständiger
Mikrocontroller eingesetzt. Dieser soll bei Umgebungstemperaturen von bis zu 200°C eingesetzt werden.
Probleme existieren hierbei zum einen in der Vielfalt der Komponenten, es sind kaum noch
Bauteile mit einem spezifizierten Einsatztemperaturbereich von bis zu 200°C erhältlich, als
auch in den Lieferbedingungen der erhältlichen Bauteile.
Aus diesem Grund wurde die Leistungselektronik zunächst mit einer möglichst ähnlichen Standardelektronik aufgebaut.
Im zweiten Teil der Bachelorarbeit wird die Software des Hochtemperatur Mikrocontrollers
für den Servoregler erläutert. Es entstand ein erster Programmentwurf, welcher in weiteren
Schritten ergänzt und optimiert werden kann.
Chris Bauer
II
Inhaltsverzeichnis
1 Einleitung
1.1 Motivation der Bachelorarbeit . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Gegenstand und Ziele dieser Arbeit . . . . . . . . . . . . . . . . . . . . .
1.3 Gliederung der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1
2
2
2 Grundlagen BLDC Motor
2.1 Aufbau und Funktionsweise BLDC Motor . . . .
2.2 Ansteuerung BLDC Motor . . . . . . . . . . . . .
2.2.1 Grundlegende Elektronik Komponenten
2.3 Maxon EC 22 HD Motor . . . . . . . . . . . . . .
2.4 Parametervergleich Maxon EC 22 HD mit EC 22
2.5 Festlegung Parameter für Motorelektronik . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
4
5
5
8
9
12
3 Hochtemperatur Elektronik
3.1 Anforderungsanalyse - Pflichtenheft . . . . .
3.2 Auswahl geeigneter Hochtemperaturbauteile
3.2.1 Mikrocontroller . . . . . . . . . . . . .
3.2.2 MOSFETs . . . . . . . . . . . . . . . .
3.2.3 Halbbrücken-Leistungstreiber . . . .
3.2.4 Strommessung . . . . . . . . . . . . .
3.2.5 Passive Bauteile . . . . . . . . . . . . .
3.3 Hochtemperatur Platine . . . . . . . . . . . .
3.4 Lötzinn . . . . . . . . . . . . . . . . . . . . . .
3.5 Notwendigkeit Standard Elektronik . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
15
15
16
16
19
23
25
27
30
31
31
4 Standardelektronik
4.1 Anforderungsanalyse – Pflichtenheft .
4.2 Auswahl geeigneter Bauteile . . . . .
4.2.1 MOSFETs . . . . . . . . . . . .
4.2.2 Halbbrücken-Leistungstreiber
4.2.3 Strommessung . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
32
32
33
33
35
35
5 Schaltungsentwicklung
5.1 Halbbrücken . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
36
36
Chris Bauer
III
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Inhaltsverzeichnis
.
.
.
.
.
.
.
.
.
36
37
41
41
42
47
47
47
49
6 EMV Probleme / EMV Schutz
6.1 EMV Probleme durch das Schaltungslayout . . . . . . . . . . . . . . . . .
6.2 EMV Schutz in der Bohrlochsonde . . . . . . . . . . . . . . . . . . . . . .
51
51
53
7 Softwareentwicklung
7.1 Inbetriebnahme einzelner Module . . . . . . . . .
7.1.1 Realisierung der Kommutierung . . . . . .
7.1.2 PWM Erzeugung . . . . . . . . . . . . . . .
7.1.3 Strommessung mittels AD-Wandler . . . .
7.1.4 Drehzahlmessung . . . . . . . . . . . . . .
7.2 Regelkreis . . . . . . . . . . . . . . . . . . . . . . .
7.2.1 Aufruf Regelkreis . . . . . . . . . . . . . . .
7.2.2 Drehzahlregelung . . . . . . . . . . . . . .
7.3 Interruptstrukur . . . . . . . . . . . . . . . . . . . .
7.3.1 Interrupt-Prioritäten . . . . . . . . . . . . .
7.3.2 Gesamtaufbau des Servoregler-Programms
.
.
.
.
.
.
.
.
.
.
.
54
54
54
61
64
65
66
67
68
72
72
73
8 Motorprüfstand
8.1 Verifizierung Drehzahlmessung . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Messungen P-Regler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
76
78
9 Zusammenfassung und Ausblick
9.1 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
81
82
Literaturverzeichnis
83
A Anhang
A.1 Ausschnitt Datenblatt Maxon EC 22 HD Motor . . . . . . . . . . . . . . .
A.2 Datenblatt UT Leistungswiderstände von SRT . . . . . . . . . . . . . . .
87
87
90
Chris Bauer
IV
5.2
5.3
5.4
5.1.1 MOSFETs . . . . . . . . . . . . . . . . . . . . . .
5.1.2 Treiberschaltung . . . . . . . . . . . . . . . . . .
Strommessung . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Current-Shunt-Monitor . . . . . . . . . . . . . .
5.2.2 Dimensionierung der Schaltung . . . . . . . . .
Anpassungen an Hochtemperatur Embedded System .
5.3.1 Strommessung mittels AD-Wandler . . . . . . .
5.3.2 Beschaltung der Hall-Sensoren . . . . . . . . . .
Anschluss der Leistungselektronik am Mikrocontroller
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Abbildungsverzeichnis
2.1
2.2
2.3
2.4
2.5
2.6
2.7
Prinzip Gleichstrommaschine . . . . . . . . . . . . . . . . .
Grundlegende Funktionsweise BLDC Motor . . . . . . . .
Blockschaltbild BLDC Motor mit Elektronik . . . . . . . . .
Kommutierungslogic Maxon EC Motor . . . . . . . . . . .
Einphasiges Ersatzschaltbild BLDC Motor . . . . . . . . . .
Vergleich Drehzahlkennlinien Maxon EC 22 HD und EC 22
Stromrippel erzeugt durch PWM Signal . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
5
6
7
11
12
13
3.1
3.2
3.3
3.4
3.5
Biegen und abschneiden der Pins - SM470R1B1M-HT . . . . .
Mikrocontroller auf Hochtemperatur Platine . . . . . . . . . .
Current-Shunt-Monitor - TI INA271-HT . . . . . . . . . . . . .
Durchlassstrom über der Temperatur - Semikron SBH 1245TL
Clifton GaAs Power Diode Hermetic Package . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
18
18
26
29
30
5.1
5.2
5.3
5.4
5.5
5.6
5.7
Schaltungslayout Halbbrückentreiber . . . . . . . . . . . . . . .
Schaltungslayout Current-Shunt-Monitor TI INA 271 . . . . . .
Sallen-Key Tiefpass 1. Ordnung aus INA271 Datenblatt . . . . .
Messbrücke mit PT-1000 für Temperaturmessung . . . . . . . .
Hall-Sensorbeschaltung auf Hochtemperatur Embedded System
Steckerbelegung Anschluss Mikrocontroller . . . . . . . . . . . .
Steckerbelegung Anschluss BLDC Motor . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
38
44
45
47
48
49
50
6.1
6.2
Störungen auf Hall-Sensorsignal . . . . . . . . . . . . . . . . . . . . . . .
Kopplungsarten für Signalstörungen . . . . . . . . . . . . . . . . . . . . .
52
52
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
Hyperwürfel Gray-Code Hall-Sensorwerte . . . . . . . . . . . . . .
Programmablaufplan der Startinitialisierung . . . . . . . . . . . . .
Programmablaufplan Interrupt Service Routine der Kommutierung
Generieren eines PWM-Signals . . . . . . . . . . . . . . . . . . . . .
Prescaler Configuration HET . . . . . . . . . . . . . . . . . . . . . .
Takteingang RTI-Modul . . . . . . . . . . . . . . . . . . . . . . . . .
Beispiel Kaskadenregelung . . . . . . . . . . . . . . . . . . . . . . .
Programmablaufplan P-Regler . . . . . . . . . . . . . . . . . . . . .
Programmablauf durch Interrupts . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
56
57
59
62
63
65
69
71
73
8.1
Motorprüfstand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
75
Chris Bauer
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
V
8.2
8.3
8.4
8.5
Diagramm zur Verifizierung der Drehzahlmessung .
U
Testlauf 500 min
- Strombegrenzung am Netzteil 1,5A .
U
Testlauf 500 min - Strombegrenzung am Netzteil 7,2A .
U
Testlauf 2000 min
- Strombegrenzung am Netzteil 7,2A
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
78
79
80
80
2.1
2.2
2.3
Ausschnitt vom Maxon EC 22 HD Datenblatt . . . . . . . . . . . . . . . .
Ausschnitt aus dem Datenblatt des Maxon EC 22 Motors . . . . . . . . .
Vergleich Maxon EC 22 mit EC 22 HD . . . . . . . . . . . . . . . . . . . .
8
9
10
3.1
3.2
3.3
Gegenüberstellung erhältliche Hochtemperatur Controller . . . . . . . .
Vergleich geeignete erhältliche Hochtemperatur MOSFETs . . . . . . . .
Daten Cissiod CHT-Hyperion Halfe Bridge Driver . . . . . . . . . . . . .
17
20
25
7.1
7.2
Kommutierungslogik BLDC Motor . . . . . . . . . . . . . . . . . . . . . .
TAP-Interrupt-Bits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
55
67
8.1
8.2
Messdaten Drehzahlverifizierung . . . . . . . . . . . . . . . . . . . . . . .
Gemittelte Drehzahlwerte in 6er Schritten . . . . . . . . . . . . . . . . . .
76
77
Tabellenverzeichnis
Chris Bauer
VI
1. Einleitung
Elektrische Energie und Wärmeenergie sind aus unserer heutigen Gesellschaft nicht
mehr wegzudenken. Sie gehören nahezu schon zu den Grundbedürfnissen eines jeden
Menschen.
Elektrische Energie wird meist aus fossilen Energieträgern oder durch Kernenergie gewonnen. Hierbei ist jedoch bekannt, dass die fossilen Brennstoffe einen endlichen Energieträger darstellen. Ebenso sind die Gefahren, welche von der Kernenergie ausgehen
können, bekannt. Als aktuelles Beispiel ist hier das Unglück vom März 2011 in Fukushima zu nennen.
Um in Zukunft genügend Energie auf sicherem Wege erzeugen zu können, versucht
man auf regenerative Energiequellen umzusteigen. Eine mögliche regenerative Energiequelle ist die Geothermie. Hierbei handelt es sich um die im zugänglichen Teil der
Erdkruste gespeicherte Wärme.
1.1. Motivation der Bachelorarbeit
Um mittels Erdwärme elektrische Energie erzeugen zu können, muss in tiefere Teufen1
gebohrt werden, damit wärmere Gebiete in der Erdkruste erreicht werden. Die Temperatur steigt mit der Bohrlochtiefe proportional an.
Hierbei werden in Teufen von 5000m Temperaturen von bis zu 200°C erwartet. Werden
für die Geothermieanwendung solche Teufen erreicht, spricht man von der Tiefen Geothermie.
Hierbei handelt es sich um ein weitgehendst unerforschtes Gebiet, da die widrigen
Umgebungsbedingungen in solch tiefen Bohrlöchern (bis zu 600bar Druck und 200°C
Umgebungstemperatur) das Vorhaben deutlich erschweren.
Im Rahmen des Projekts „Zwerg“ wird versucht mehr Informationen aus diesen Teufen
zu erörtern. Ein Problem stellen hierbei die benötigten Elektronikkomponenten dar.
Es werden derzeit zwei verschiedene Lösungskonzepte verfolgt, um das Problem der
Umgebungsbedingungen in den Griff zu bekommen. Ein Ansatz ist die Isolierung und
1 Teufe
ist die bergmännische Bezeichnung für die Tiefe. [27]
Chris Bauer
1
1.2. Gegenstand und Ziele dieser Arbeit
Kühlung bestimmter Sondenabschnitte um Standardelektronik verwenden zu können.
Im anderen Ansatz wird versucht eine Elektronik auf Basis für diese Randbedingungen
spezifizierter Bauteile aufzubauen.
Ziel ist es der Industrie und Forschung ein Baukasten aus „components of the shell“
(cots) zur Verfügung zu stellen, um die Forschungsarbeiten zu erleichtern.
Hierbei werden unter anderem auch Aktoren benötigt um gewisse Aufgaben, beispielsweise Pumpen einer Kühlflüssigkeit innerhalb der Sonde, zu realisieren.
1.2. Gegenstand und Ziele dieser Arbeit
Seit Anfang des Jahres 2011 ist ein bürstenloser Gleichstrommotor in Hochtemperaturausführung von der Firma Maxon erhältlich. Eine entsprechende Regelung für diese
Umgebungsbedingungen wird jedoch nicht bereit gestellt.
Ziel dieser Bachelorarbeit ist es einen temperaturbeständigen Servoregler für bürstenlose Gleichstrommotoren aufzubauen. Besonders bei der Leistungselektronik, welche
selbst Abwärme an die Umgebung gibt, wird versucht, diese aus dem gekühlten Bereich der Sonde auszulagern.
In einer Studienarbeit von Jochen Antons wurden aktuelle Servoregler auf ihren Funktionsumfang geprüft, sowie grundlegend notwendige Bauteile erörtert, die für den Betrieb eines bürstenlosen Gleichstrommotors benötigt werden.[1]
In dieser Bachelorarbeit wird versucht, die Elektronik in Hochtemperaturausführung
aufzubauen und ein erster Programmentwurf auf einem Hochtemperatur Mikrocontroller umgesetzt.
1.3. Gliederung der Arbeit
Nach der Einführung im ersten Kapitel wird im Kapitel zwei auf die Grundlagen von
bürstenlosen Gleichstrommotoren eingegangen, sowie der von Maxon Motor erhältlich
Hochtemperatur Motor „EC 22 HD“ erläutert. Im folgenden Kapitel werden auf Basis
des Grundlagenwissens die für den Betrieb notwendigen Komponenten in Hochtemperaturausführung vorgestellt.
Aufgrund der schwierigen Lieferbedingungen wird im Kapitel vier auf die ersatzweise
aufgebaute Standardelektronik des Leistungsteils eingegangen. Im folgenden Kapitel
wird die Dimensionierung der Elektronik Schaltung und das Schaltungslayout erläutert.
Chris Bauer
2
1.3. Gliederung der Arbeit
Danach wird auf die Implementierung der Software auf dem Hochtemperatur Mikrocontroller eingegangen, sowie Problemstellen im Schaltungslayout aufgezeigt.
Abschließend werden einige Testreihen vorgestellt, ein kurzes Statement, sowie ein
Ausblick auf weiterführende Arbeiten am temperaturbeständigen Servoregler gegeben.
Chris Bauer
3
2. Grundlagen BLDC Motor
2.1. Aufbau und Funktionsweise BLDC Motor
Bei einem bürstenlosen Gleichstrommotor, auch Brushless DC Motor (BLDC) genannt,
sind zur Kommutierung keine Bürsten vorhanden, sondern es wird eine elektronische
Schaltung benötigt. Aus diesem Grund ist auch die Bezeichnung EC-Motor für „electronically commutated“ geläufig. Vom prinzipiellen Aufbau entspricht ein BLDC Motor dem einer permanenterregten Synchronmaschine. [37]
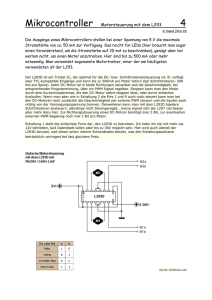
Beim Kommutiervorgang in Gleichstrommaschinen wird die Stromrichtung im Anker
umgepolt. Dies ist notwendig, um bei Drehbewegung ein Drehmoment in die gleiche
Richtung erzeugen zu können. Die physikalische Grundlage hierzu besteht darin, dass
sich entgegengesetzte Pole anziehen und gleiche abstoßen. Will man die Kraft in eine Richtung trotz Drehbewegung aufrecht erhalten, ist es ab einem gewissen Winkel
notwendig den Stromfluss, welcher im Anker den magnetischen Fluss erzeugt, umzupolen bzw. zu verändern. [34]
Abbildung 2.1.: Prinzip Gleichstrommaschine [39]
Der mechanische Kommutator besteht aus Bürsten und Schleifringen. In Abbildung 2.1
sind in braun die Schleifringe, sowie in rot und blau in der Mitte an der Versorgungsspannung die Bürsten zu erkennen. Die mechanische Kommutierung weist mit zunehmender Betriebsdauer einen Verschleiß an den Bürsten und Schleifringen auf.
Chris Bauer
4
2.2. Ansteuerung BLDC Motor
Bürstenlose Motoren hingegen arbeiten nahezu verschleißfrei, allerdings bedarf es einer aufwendigen Elektronik um das Drehfeld zu erzeugen.
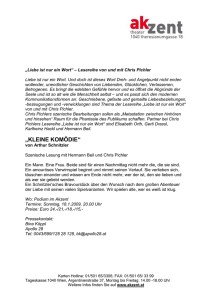
Abbildung 2.2.: Grundlegende Funktionsweise BLDC Motor [37]
In Abbildung 2.2 ist der Aufbau eines BLDC Motors zu erkennen. Er besteht aus mindestens 3 Wicklungen im Stator und einem Permanentmagneten mit mindestens einem
Pol im Anker. Zur Lagenerkennung können zusätzliche Sensoren, z.B. Hall-Elemente
am Läufer angebracht sein.
Um beim BLDC Motor eine Drehbewegung zu erzeugen, werden die Wicklungen im
Stator je nach Läuferposition mit Strom beaufschlagt. Der Läufer richtet sich nach dem
magnetischen Fluss, welcher durch die Wicklungen im Stator erzeugt wird, aus. Die
Schalter V1-V6 (auch als 6-Puls-Brückenschaltung bezeichnet) können abwechselnd so
angesteuert werden, dass das Ausrichten des Läufers in einer Drehbewegung resultiert.
2.2. Ansteuerung BLDC Motor
2.2.1. Grundlegende Elektronik Komponenten
Die Elektronikkomponenten eines Servoreglers lassen sich in zwei Bereiche gliedern.
Ein Bereich ist die Leistungselektronik, welche den Motor direkt mit elektrischer Leistung versorgt. Der zweite Bereich ist die Kleinsignalelektronik oder auch Steuerelek-
Chris Bauer
5
2.2. Ansteuerung BLDC Motor
tronik genannt, welche die Kommutierungs- und Regelungsaufgaben übernimmt.
Abbildung 2.3.: Blockschaltbild BLDC Motor mit Elektronik [19]
Leistungselektronik
Als Leistungsschalter (in Abbildung 2.2 als V1 bis V6 bezeichnet) kommen Transistoren, beispielsweise Feldeffekttransistoren bzw. MOSFETs (Metal Oxide Semiconductor
Field-Effect Transistoren) zum Einsatz. Diese Transistoren werden über das Gate mit
einer Spannung gesteuert.
Um den Stromkreis über die Motorspulen herzustellen werden 3 Halbbrücken, bestehend aus 2 MOSFETs, benötigt. Um die Motorwicklungen mit Strom zu versorgen muss
immer in zwei verschiedenen Halbbrücken jeweils ein MOSFET durchgeschaltet sein
(siehe Abbildung 2.3).
Steuerelektronik
Die Kommutierungslogik (siehe Abbildung 2.4) kann entweder per Software auf einem
Mikrorechner bzw. Mikrocontroller oder per Hardware mit Logikbausteinen realisiert
werden. In der Geothermie Hochtemperaturanwendung wird versucht mit möglich
wenigen Halbleiterbauteilen auszukommen. Aus diesem Grund wird die Kommutierungslogik mit einem Mikrocontroller in Software realisiert. Zur Kommutierung wird
die aktuelle Position des Läufers benötigt. Diese wird im Falle des verwendeten Maxon
EC 22 HD Motors von drei Hallsensoren detektiert, wodurch sich eine Auflösung in 60°
Schritten ergibt.
Chris Bauer
6
2.2. Ansteuerung BLDC Motor
Abbildung 2.4.: Kommutierungslogic Maxon EC Motor [17]
Die Aufgabe der Elektronik beim Kommutieren besteht darin, die Position auszulesen und das Drehfeld über die Leistungselektronik ständig anzupassen. (siehe Abbildung 2.3) Da die Position des Rotors nur in 60° Schritten aufgelöst werden kann, wird
der Motor mit Blockkommutierung betrieben. Blockkommutierung bedeutet, dass die
Statorwicklungen so mit Strom beaufschlagt werden, dass das resultierende elektromagnetische Feld des Stators in 60° Schritten wandert. Hierdurch entsteht ein Drehmomentrippel von ca. 14%, da die Position des Rotors im Bezug auf das magnetische Feld,
und die damit resultierende Kraft, nicht immer identisch ist. [17]
Damit ein Strom durch die Motorwicklungen fließt, müssen immer zwei Leistungsschalter geschlossen sein. Ein Schalter an Plus und ein Schalter der an Minus angebunden ist ergeben den Stromkreis (siehe Abbildung 2.3). Durch eine Sternverschaltung
der Motorwicklungen fließt der Strom somit durch zwei Motorspulen.
Zusätzlich zur Kommutierungslogik muss die Steuerelektronik, bzw. der Mikrocontroller, die Regelung der Drehzahl oder Positionieraufgaben übernehmen. Außerdem
wird in der Hochtemperaturanwendung eine Überwachung der Umgebungstemperatur notwendig sein, um die Regelparameter des Motors gegebenenfalls anpassen zu
können.
Chris Bauer
7
2.3. Maxon EC 22 HD Motor
2.3. Maxon EC 22 HD Motor
Seit Anfang 2011 ist im Maxon Motorenprogramm der Maxon EC 22 HD Motor erhältlich. EC steht hierbei für „electronically commutated“ also für einen bürstenlosen
Gleichstrommotor. HD wird mit „Heavy Duty“ für harsche Umgebungsbedingungen
als Zusatz angegeben. Die Zahl 22 gibt den Außendruchmesser von 22mm des Elektromotors an. Von diesem Motortyp ist eine Variante welche in Luft, sowie eine die in
Öl funktioniert, erhältlich. Die maximale Dauerleistung bei 25°C Umgebungstemperatur, des in Öl gelagerten Motors, beträgt 240 Watt. Bei 200°C Umgebungstemperatur
können noch ca. 80W Dauerleistung abgegeben werden. Für die Anwendung in der
Geothermie Bohrlochsonde wird der Motor für Anwendungen in Öl verwendet, da die
komplette Sonde mit Öl befüllt wird. Als Referenzmedium gibt Maxon das „Shell Tellus
Öl T15„ an. Dieses Öl wurde bestellt und ist bereits für spätere Tests mit dem EC 22 HD
vorhanden. Bei Hochtemperaturtests mit diesem Öl sollte jedoch auf die Entzündlichkeit bei hohen Temperaturen geachtet werden. Der Flammpunkt des Öls beträgt 170°C.
Tabelle 2.1.: Ausschnitt vom Maxon EC 22 HD Datenblatt [18]
Die Motoren können in einer Version mit oder ohne Hall-Sensoren bestellt werden. Für
die Anwendung in der Geothermie Bohrlochsonde ist der Motor mit Hall-Sensoren besser geeignet, da dieser auch im Start-/Stoppbetrieb verwendet werden soll. Die Motorvariante mit Hall-Sensoren erreicht eine Gesamtlänge von ca. 90mm.
Für die Dimensionierung der Leistungselektronik, an welche der EC 22 HD Motor an-
Chris Bauer
8
2.4. Parametervergleich Maxon EC 22 HD mit EC 22
geschlossen wird, sind die Nennspannung von 48V und der Nennstrom von 1,88A (siehe Tabelle 2.1 letzte Spalte) bei 200°C Umgebungstemperatur zu beachten.
Der EC 22 HD Motor wurde im April bestellt und soll voraussichtlich im August geliefert werden. Aufgrund der Ungewissheit, ob der Motor zu diesem Zeitpunkt geliefert
wird, wurde das Niedertemperaturderivat EC 22, bei Maxon Motor bestellt.
Mit diesem Motor können erste Tests mit dem Servoregler erfolgen. Bei der Programmierung der Regelung ist hierbei auf die Unterschiede zwischen diesen beiden Motoren
zu achten, weshalb im nächsten Kapitel ein kurzer Vergleich zwischen diesen beiden
Motoren erfolgt.
2.4. Parametervergleich Maxon EC 22 HD mit EC 22
In diesem Kapitel wird kurz auf die Unterschiede zwischen dem EC 22 und dem EC
22 Heavy Duty Motor eingegangen. Der EC 22 Motor wird, bis der EC 22 HD Motor
geliefert wird, für die Softwareentwicklung als Testmotor verwendet.
Tabelle 2.2.: Ausschnitt aus dem Datenblatt des Maxon EC 22 Motors [21]
Beim normalen EC 22 Motor kann beim Kauf zwischen verschiedenen Nennspannungen entschieden werden. Bei der gekauften Version handelt es sich um die Version mit
einer Nennspannung von 48V (siehe Tabelle 2.2 roter Kasten). Bei den Motordaten werden für die Gegenüberstellung die wichtigsten Werte bei 25°C Umgebungstemperatur
verglichen (vgl. Tabelle 2.3).
Chris Bauer
9
2.4. Parametervergleich Maxon EC 22 HD mit EC 22
Nennspannung
Leerlaufdrehzahl
Nenndrehzahl
Nennstrom
Nennmoment
Anlaufstrom
Anschlusswiderstand
Phase-Phase
Anschlussinduktivität
Phase-Phase
Drehzahlkonstante
Drehmomentkonstante
Kennliniensteigung
EC 22 HD
48 V
U
12900 min
U
8560 min
4,53 A
149 mNm
13,4 A
EC 22
48 V
U
32200 min
U
30100 min
3,33 A
45,8 mNm
60,2 A
EC 22 angepasst
20 V
U
13440 min
25,1 A
3,59 Ω
0,797 Ω
0,797 Ω
0,357 mH
0,188 mH
0,188 mH
U
278 min
·V
34,3 mNm · A
29 min·UmNm
U
672 min
·V
14,2 mNm · A
37,7 min·UmNm
U
672 min
·V
14,2 mNm · A
37,7 min·UmNm
Tabelle 2.3.: Vergleich Maxon EC 22 mit EC 22 HD
Von den elektrischen Parametern abgesehen, sollte der verwendete Motor einen Außendurchmesser von 22mm sowie einen Wellendurchmesser von 4mm aufweisen. Trifft
dies nicht zu, müsste zusätzlich zu den Änderungen im elektrischen Aufbau auch der
mechanische Prüfstandaufbau an den Niedertemperaturmotor angepasst werden.
Im Folgenden wird auf die elektrischen Unterschiede zwischen den Maxon EC 22 HD
und EC 22 Motoren näher eingegangen.
Mit der angelegten Spannung und der Drehzahlkonstante, lässt sich mit einer Näherung auf die Leerlaufdrehzahl zurückrechnen:
n0 = k n · U
[17]
(2.1)
U
n0 ...Leerlaufdrehzahl [ min
]
U
kn ...Drehzahlkonstante [ min
·V ]
U ...angelegte Versorgungsspannung [V]
Chris Bauer
10
2.4. Parametervergleich Maxon EC 22 HD mit EC 22
Mit dem Anlaufstrom und der Drehmomentkonstante lässt sich das Anhaltemoment
errechnen:
MH = k M · IA
[17]
(2.2)
M H ...Anhaltemoment [mNm]
k M ...Drehmomentkonstante[ mNm
A ]
I A ...Anlaufstrom [A]
Der Anlaufstrom lässt sich aus der angelegten Spannung und dem Anschlusswiderstand Phase-Phase errechnen.
Im Anlaufmoment kann die Motorinduktivität (hier L1), aufgrund stationären Verhaltens und die Induktionsspannung vom Polrad (UP ), da noch keine Drehbewegung vorhanden ist, vernachlässigt werden.
Abbildung 2.5.: Einphasiges Ersatzschaltbild BLDC Motor
Für den Anlaufstrom gilt: I A =
US
R
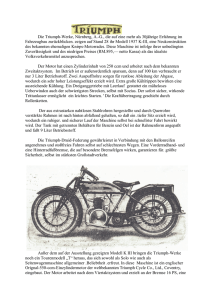
Mit den genannten Parametern kann die Drehzahlkennlinie bei konstanter Spannung
in einem Diagramm dargestellt werden. Die Werte berücksichtigen noch keine Toleranzen oder Temperatureinflüsse, reichen aber dennoch für eine überschlagsmässige
Betrachtung aus. In Abbildung 2.6 ist in einem Diagramm ein Vergleich der beiden
Motoren mittels Drehzahlkennlinie dargestellt.
Die Leerlaufdrehzahl n0 des EC 22 Motors wird auf das Niveau des EC 22 HD Motors
herabgesetzt, indem die angelegte Spannung auf 20V reduziert wird.
Chris Bauer
11
2.5. Festlegung Parameter für Motorelektronik
Durch verändern der angelegten Spannung wird eine Parallelverschiebung der Drehzahlkennlinie bewirkt. Dies ist für den Motor unproblematisch, da DC Motoren mit
beliebigen Spannungen betrieben werden können.
Aus dem Diagramm in Abbildung 2.6 sind auch die unterschiedliche Kennliniensteigung
∆n
∆M
zu erkennen. Anhand der Kennliniensteigung lässt sich ein direkter Vergleich
zwischen verschiedenen Motoren aufstellen. Hierbei lässt sich generell sagen, je kleiner
die Steigung, desto unempfindlicher reagiert die Drehzahl auf Last- bzw. Drehmomentänderungen und desto kräftiger ist der Motor. [21]
Bei der Programmierung des Servoreglers ist darauf zu achten, dass alle Motor abhängigen Parameter so einfach wie möglich vom EC 22 an den EC 22 HD Motor angepasst
werden können.
Abbildung 2.6.: Vergleich Drehzahlkennlinien Maxon EC 22 HD und EC 22
2.5. Festlegung Parameter für Motorelektronik
Für die Motorelektronik werden einige Eckdaten für den Betrieb des Motors von der
Dimensionierung festgehalten, um die Elektronikkomponenten besser auswählen zu
können.
Als Kommutierungsart wird Blockkommutierung gewählt. Eine Sinuskommutierung
ist mit der derzeitigen Rotorlageauflösung mittels den Hall-Sensoren in 60° Schritten
Chris Bauer
12
2.5. Festlegung Parameter für Motorelektronik
nicht möglich, es müssten hierfür Signale von Encoder oder Resolver zur Rotorlagenauflösung zur Verfügung stehen. [17]
Die Motorspulen werden bei der Blockkommutierung mit einem Pulsweitenmodulierten Singal (PWM) bestromt. Hierbei lässt sich die Drehzahl über das Verhältnis von
Impulsdauer zur Periodendauer (Tastverhältnis) des PWM-Signals verstellen.
Die Spannung und somit die Drehzahl, welche am Motor anliegt, stellt sich Proportional zum Tastverhältnis des PWM-Signals über die Motorinduktivität ein.
Es entstehen hierbei jedoch sogenannte Stromrippel, wie in Abbildung 2.7 zu erkennen
ist. Die gewählte Frequenz des PWM-Signals hängt deshalb unter anderem von der Induktivität der Motorwicklungen, einem Motor abhängigen Parameter, ab.
Abbildung 2.7.: Stromrippel erzeugt durch PWM Signal [15]
In der Gleichung 2.3 wird ersichtlich, welche Parameter die Größe der Stromrippel beeinflussen.
∆Imax =
Vcc
2 · f PW M · ( L Mot + L Add )
[15]
(2.3)
∆Imax ...maximal auftretende Stromschwankungen [A]
VCC ...Spannung Motor [V]
fPW M ...Frequenz des PWM Signals [Hz]
L Mot ...Induktivität der Motorwicklung [H]
L Add ...Zusätzliche Drosselinduktivität [H]
Maxon empfiehlt für kleine Motoren eine PWM Frequenz zwischen 39kHz und 60kHz,
damit die entstehenden Stromrippel nicht zu groß werden. Dies hätte eine Aufwärmung des Motors zur Folge. [15]
Chris Bauer
13
2.5. Festlegung Parameter für Motorelektronik
Aus diesem Grund wird als PWM-Frequenz für den Hochtemperatur Brushless DC
Regler 50kHz festgelegt. Setzt man nun die Werte des Maxon EC 22 HD Motors (Abschnitt A.1) in die Gleichung 2.3 ein, so erhält man als Ergebnis maximale Stromrippel
von 1,34 A.
In der ersten Testphase wird zusätzlich der Maxon EC 22 Motor eingesetzt. Die Motorwicklungen haben bei diesem Motor eine deutlich geringere Induktivität (siehe Tabelle 2.2) . Die Berechnung mit der Gleichung 2.3 ergibt bei diesem Motor maximale
Stromrippel von 4,07 A.
Sind die Stromrippel zu hoch können in den Stromkreis, zusätzlich zur Motorinduktivität, in Reihe Drosselinduktivitäten integriert werden. [15]
Im Datenblatt des 1-Q-EC Verstärker DEC Modules 50/5 von Maxon wird die Gleichung 2.4 angegeben. Mit dieser Gleichung kann die benötigte Indutkivität errechnet
werden. Ist das errechnete Ergebnis negativ oder Null, so wird keine zusätzliche Induktivität benötigt. Ansonsten kann die benötigte zusätzliche Drosselinduktivität direkt aus dem Ergebnis abgelesen werden. [20]
L Phase ≥ 0, 5 · (
VCC
− (0, 3 · L Motor ))
6 · f PW M · IN
[20]
(2.4)
LPhase ... zusätzliche externe Induktivität pro Phase [H]
VCC ...Spannung Motor [S]
fPW M ...Frequenz des PWM Signals [Hz]
L Mot ...Induktivität der Motorwicklung [H]
Setzt man die Werte des EC 22 HD Motors in die Gleichung 2.4 ein, so erhält man ein
Ergebnis von -36µH. Dies bedeutet bei einer PWM-Frequenz von 50kHz werden keine
zusätzlichen Drosselinduktivitäten benötigt.
Beim EC 22 Motor von Maxon erhält man mit obiger Gleichung 2.4 als Ergebnis 6,3µH.
Es wird also eine externe zusätzliche Drosselinduktivität benötigt. Es werden hierfür
10µH Spulen eingesetzt, da eine größere Induktivität keinen Nachteil mit sich bringt.
Die errechneten Stromrippel von Gleichung 2.3 verringern sich mit der zusätzlichen
Induktivität von 4,07A auf 3,75A. Die Stromrippel des EC 22 Motors sind trotz der zusätzlichen Induktivität noch deutlich größer als die Stromrippel des Hochtemperatur
Motors.
Chris Bauer
14
3. Hochtemperatur Elektronik
3.1. Anforderungsanalyse - Pflichtenheft
Die wichtigsten Parameter für die Auswahl von geeigneten Komponenten für den Servoregler sind die Umgebungsbedingungen und der verwendete Maxon EC 22 HD Elektromotor. Es lassen sich folgende Anforderungsspezifikationen an die Hochtemperaturelektronik stellen:
Anforderungen nach Umgebungseinflüssen:
• Komponenten für Umgebungstemperaturen bis 200°C spezifiziert
• Vibrationsfestigkeit der Lötstellen und Platine
• Lebensdauer mindestens 1000h bei 200°C
Anforderungen nach Motordaten:
U
• Maximaldrehzahl für Kommutierung beträgt 13900 min
• Maximaler Dauerstrom Maxon EC 22 HD bei 25°C beträgt 4,53A
• Maximaler Dauerstrom Maxon EC 22 HD bei 200°C beträgt 1,88A
• Maximaler Anlaufstrom Maxon EC 22 HD 13,4A bei 25°C
• PWM Frequenz für Blockkummutierung beträgt 50kHz
• Nennspannung des Motors beträgt 48V
Anforderungen an Elektronik nach Regelungsaspekten:
• Für Drehzahlregelung min 3 PWM-Ausgänge
• AD-Wandler Eingang für Strommessung
Chris Bauer
15
3.2. Auswahl geeigneter Hochtemperaturbauteile
• 3 Interrupt fähige Eingänge für Hallsensoren
• 3 Ausgänge um Halbbrücken zu aktivieren/deaktivieren
• Temperaturmessung und Anpassung der Regelung nach Temperatureinflüssen
• Kurzschlussschutz in Hardware durch Halbbrückentreiber
Alle Komponenten, welche für die Funktionalität notwendig sind, müssen für diese
Randbedingungen geeignet sein. Hierzu zählen auch die Verbindungstechnik und die
Leiterplatte.
Die Hardware für die Temperaturmessung wurde schon in einer Projektarbeit auf der
Platine des Hochtemperatur Embedded Systems integriert. Die Temperaturmessung
muss in dieser Arbeit nicht dimensioniert werden. [2]
3.2. Auswahl geeigneter Hochtemperaturbauteile
Grundlegend lässt bei der Auswahl der Hochtemperaturkomponenten sagen, dass die
Vielfalt an Bauteilen für diesen Temperaturbereich stark eingeschränkt ist. Nur wenige
Hersteller bieten Halbleiterbauteile für diesen Temperaturbereich an.
3.2.1. Mikrocontroller
Der Mikrocontroller des Servoreglers muss ebenfalls den in Abschnitt 3.1 genannten
Anforderungen entsprechen. Texas Instruments bietet einen Mikrocontroller mit ARM7
Core und einem Einsatztemperaturbereich von -55°C bis +220°C an. Der Controller ist
in einem Keramikgehäuse oder als KGD1 erhältlich. Der Funktionsumfang der Variante
mit Gehäuse ist deutlich geringer, verglichen mit dem direkten Halbleiterchip, da nicht
alle Anschlüsse nach außen gebondet werden. Für den Hochtemperatur Servoregler ist
der Funktionsumfang mit Gehäuse dennoch ausreichend.
Im Rahmen einer Projektarbeit im 4. Semester wurde ein Hochtemperatur Embedded
System auf Basis des TI SM470R1B1M-HT Mikrocontrollers entwickelt.[2] Dieses wird
für den Servoregler in der Bachelorarbeit zur Regelung der Drehzahl und Steuerung
der elektronischen Kommutierung verwendet. Hierfür wird es um die notwendigen
Leistungsbauteile auf einer zusätzlichen Platine ergänzt.
Derzeit sind die in der Tabelle 3.1 aufgezeigten Hochtemperatur Controller erhältlich.
1 KGD bedeutet Known Good Die. In der Mikroelektronik wird hiermit ein Halbleiter bezeichnet, der, bevor
er in einem Gehäuse untergebracht wird, als fehlerfrei qualifiziert wird. [36]
Chris Bauer
16
3.2. Auswahl geeigneter Hochtemperaturbauteile
Honeywell
HT83C51
Texas
Instruments
SM470R1B1MHT
16/32Bit
Mikrocontroller
60MHz
(Pipeline Mode)
Texas
Instruments
SM320F2812HT
Texas
Instruments
SM320F28335HT
DSP 32Bit CPU
DSC 32Bit CPU
150MHz
100MHz
256K x 16 Flash
1K x 16 OTP
ROM
4K × 16 RAM
8K × 16 SARAM 1K x 16
SARAM
Controllerart
8Bit
Mikrocontroller
Max. Frequenz
16MHz
ROM
8K Byte Mask
ROM
1M-Byte
Program Flash
Up to 128K × 16
Flash 1K × 16
OTP ROM
RAM
256 Bytes RAM
64K-Byte Static
RAM (SRAM)
34K x 16 SARAM 2
-
10/12
12/16
12/16
-55°C bis 225°C
-55°C bis 220°C
-55°C bis 220°C
-55°C bis 210°C
Über
den
kompletten
Temperaturbereich 5 Jahre
garantiert
Bei 220°C Junctiontemperatur
ca. 1000h
Bei 220°C Junctiontemperatur
ca. 1000h
Bei 200°C Junctiontemperatur
ca. 5000h
AD-Wandler
(Bit/Kanäle)
Temperaturbereich
Lebenserwartung
Tabelle 3.1.: Gegenüberstellung erhältliche Hochtemperatur Controller
2 SARAM=
Single-Access RAM: Memory space that only can be read from or written to in a single
clock cycle. [31]
Chris Bauer
17
3.2. Auswahl geeigneter Hochtemperaturbauteile
In der vorangegangenen Projektarbeit im 4. Semester wurde die Entscheidung Aufgrund des Funktionsumfangs für den TI SM470R1B1M-HT Mikrocontroller getroffen
und für diesen Controller ein Layout entwickelt. Der digitale Signal Controller (DSC)
von TI wurde erst nach Ende der Projektarbeit veröffentlicht und war zum Zeitpunkt
der Entscheidung nicht bekannt. Die Motorregelung kann jedoch problemlos mit dem
gewählten Mikrocontroller realisiert werden. Ein Umstieg auf den digitalen Signal Controller wäre zu einem späteren Zeitpunkt, wenn die Regelung sehr aufwendig werden
sollte, denkbar. Im Rahmen dieser Bachelorarbeit ist diese Umsetzung auf einen anderen leistungsfähigeren Controller nicht notwendig und zeitlich nicht zu realisieren.
Um den Controller auf der Platine verlöten zu können, müssen zunächst die Pins gebogen und abgeschnitten werden (siehe Abbildung 3.1).
Abbildung 3.1.: Biegen und abschneiden der Pins - SM470R1B1M-HT
Anschließend kann der Mikrocontroller auf der Hochtemperaturplatine, welche von
Brockstedt aus einem Polyimid-Glas-Trägermaterial gefertigt wurde, aufgelötet werden.
Abbildung 3.2.: Mikrocontroller auf Hochtemperatur Platine
Chris Bauer
18
3.2. Auswahl geeigneter Hochtemperaturbauteile
3.2.2. MOSFETs
Das wichtigste Bauteil der Leistungselektronik sind die eigentlichen Leistungsschalter,
welche die Motorspulen mit Strom beschalten (siehe Unterabschnitt 2.2.1 Grundlegende Elektronik Komponenten).
Als Schalter werden MOSFETs eingesetzt, welche für den genannten Spannungs- und
Strombereich des zu betreibenden Motors ausgelegt sein müssen. Zusätzlich muss die
Strombelastbarkeit, besonders bei den Umgebungstemperaturen von bis zu 200°C, beachtet werden. Die MOSFETs müssen hier genügend Reserven aufweisen, wobei ein
möglichst geringer Widerstand von Drain to Source (R DSon ) vorteilhaft ist.
Zusätzlich sollten die Schaltzeiten der MOSFETs möglichst kurz sein, um die Verluste beim Schalten des PWM-Signals möglichst gering zu halten. Während des Ein- und
Ausschaltvorgangs wird der Ohmsche Bereich des Transistors durchfahren. Der MOSFET verändert in Abhängigkeit der angelegten Spannung am Gate den Ohmschen Widerstand RDSon . Der Widerstand sollte über einen sehr kurzen Zeitraum ansteigen oder
sinken, wobei dann nur kurzfristig eine große Verlustleistung über dem MOSFET abfällt. Die Schaltzeit verhält sich proportional zu den Verlusten beim Schalten. Sind die
Schaltzeiten sehr schnell, ist die Verlustleistung sehr gering.
Anforderungen an die MOSFETs zusammengefasst:
• Umgebungstemperaturen bis zu 200°C
• Min. 48V Sperrspannung von Drain to Source
• Min 5A Drain Dauerstrom bei 25°C Umgebungstemperatur
• Min 2A Drain Dauerstrom bei 200°C Umgebungstemperatur
• Schaltzeiten möglichst kurz aufgrund dynamischer Belastung
Der maximale Dauerstrom ist für den Betrieb mit einem PWM-Signal nicht die Belastungsgrenze. Er gibt jedoch eine grobe Richtung über die Belastungsgrenze, aufgrund
des Widerstands R DSon und des thermischen Übergangswiderstands von Junction to
Case, an.
Hochtemperatur MOSFETs, welche bis zu 200°C Umgebungstemperatur funktionieren,
werden derzeit von drei Herstellern angeboten. Nach den Einflussgrößen Spannung
Chris Bauer
19
3.2. Auswahl geeigneter Hochtemperaturbauteile
und Umgebungstemperatur sortiert, bleiben noch drei MOSFETs, welche mit dem Motor verwendet werden könnten, übrig. Diese werden nachfolgend tabellarisch verglichen.
Temperaturbereich
Drain Spannung
Drain Strom 25°C
Drain Strom 200°C
Steuerspannung
Gate VGS
On-Time
(td−On + tr )
Off-Time
(td−O f f + t f )
RDS(on) @Tj=25°C
RDS(on) @Tj=225°C
Package
Besonderheiten
Honeywell
HTNFET
-55°C bis +300°C
Bis 60V
Max. 1A, Continuous
Max. 1A, Continuous
CISSOID
CHT-NMOS8010
-55°C bis + 300°C
Bis 80V
13,5A 1µs pulse,
Tj=25°C
9A
1µs
pulse,
Tj=225°C
5V
5V
5V
30ns
110ns
90ns @Tj=230°C
84ns
181ns
60ns @Tj=230°C
0,4Ω
Angabe fehlt
4-Pin-Power-Tab
Drain Strom Angabe nicht bekannt
für welche Temperatur
0,24Ω
0,44Ω
TO 254
0,1Ω
0,21Ω
6-lead TO257
Passende Treiber
ebenfalls erhältlich
Mit
integrierten
Treibern,
Noch
nicht erhältlich
X-RELXTR204112
-60°C bis +230°C
Bis 70V
20A 2µs pulse,
Tj=25°C
12A 2µs pulse,
Tj=230°C
Tabelle 3.2.: Vergleich geeignete erhältliche Hochtemperatur MOSFETs
Alle erhältlichen Hochtemperatur MOSFETs sind Logic Level FETs. Das bedeutet, diese
MOSFETs können mit einer Steuerspannung von 5V am Gate durchgeschaltet werden.
Beim von Honeywell erhältlichen MOSFET kann die maximale Leistung des Maxon EC
22 HD Motors nicht erreicht werden, da die Dauerstrombelastbarkeit mit 1A zu gering
ist. Aufgrund der Tatsache, dass die Umgebungsbedingungen sehr harsch sind, sollte
außerdem eine Reserve bei der Belastbarkeit der MOSFETs gegeben sein. Der MOSFET
kann somit für den Servoregler nicht verwendet werden.
Um einen Kurzschluss in einer Halbbrücke zu vermeiden, sollte in den Halbbrückentreibern eine Kurzschlusssicherung integriert sein. Ein Kurzschluss in einer Halbbrücke
bedeutet, dass beide MOSFETs einer Halbbrücke gleichzeitig durchgeschaltet sind und
somit die Spannungsquelle kurzschließen.
Viele Treiberbausteine, welche für die Ansteuerung der MOSFETs notwendig sind, bieten solche Ausstattungsfeatures. Bei den MOSFETs von X-REL ist der Treiber im MOS-
Chris Bauer
20
3.2. Auswahl geeigneter Hochtemperaturbauteile
FET integriert, was Bauteile auf der Platine einspart. Diese MOSFET-Treiberkombination
bietet laut Datenblatt jedoch das Feature mit der Kurzschlusssicherung nicht und ist zudem noch nicht erhältlich. Aus diesen Gründen werden die MOSFETs CHT-NMOS8010
von Cissoid für den Servoregler ausgewählt.
Bei der Auswahl wurden zudem die Berechnungen des maximalen Dauerstroms bei
200°C sowie die gesamten Verlustleistungen in Abhängigkeit des Motorstroms bei 200°C
Umgebungstemperatur beachtet.
Berechnung max. Dauerstrom bei TA =200°C und TJ =225°C:
Hierzu ist der Widerstand RDSon bei T J =225°C und der thermische Übergangswiderstand von Junction to Ambient ΘJA notwendig. Der Übergangswiderstand Junction to
K
Case ist mit ΘJC=5 W
angegeben. Der Übergangswiderstand von Case to Ambient wird
in dieser Rechnung vernachlässigt und sollte auch später in der Anwendung in der
Sonde, im Verhältnis zum ΘJC Widerstand, vernachlässigbar klein sein. Die MOSFETs
werden auf einen großen Kühlkörper montiert, wobei sich dieser zusätzlich in einem
Ölbad im inneren der Sonde befindet. Die komplette Elektronik der Bohrlochsonde soll
später in Öl getaucht betrieben werden.
K
Der RDSon bei T J =225°C beträgt 0,44Ω und ΘJA wird mit 5 W
angenommen.
Aus den Formeln ∆T = P · Rth , dem ohmschen Gesetz sowie P = U · I lässt sich die
zusammengesetzte Gleichung 3.1 erstellen:
s
Imax =
∆TJunction to Ambient
R DSon · ΘJ A
(3.1)
Imax ...maximaler Dauerstrom [I]
∆TJunction to
Ambient
...Temperaturunterschied Umgebung zu Halbleiter [◦ C]
RDSon ...Widerstand Drain to Source [Ω]
K
ΘJ A ...thermischer Übergangswiderstand [ W
]
Es ergibt sich ein maximaler Dauerstrom von:
Imax
Chris Bauer
v
u 225◦ C − 200◦ C
=u
= 3.37A
t
5k
0.44Ω ·
W
21
3.2. Auswahl geeigneter Hochtemperaturbauteile
Der Maxon EC 22 HD Motor ist bei 200°C noch mit einem maximalen Dauerstrom von
1,88A belastbar, womit genügend Reserven beim MOSFET bestehen.
Die MOSFETs werden allerdings nicht mit einem Dauerstrom betrieben, sondern mit
einem PWM-Signal angesteuert. Die Verlustleistung lässt sich somit in zwei Teilschritten errechnen. Diese sind die statische Verlustleistung, wenn der Schalter geschlossen
ist, und die dynamischen Schaltverluste, welche beim Schalten auftreten. Bei der statischen Verlustleistung wird das Tastverhältnis mit einberechnet, um die über die Zeit
gemittelten Verluste zu erhalten.
Berechnung Verlustleistung MOSFET bei TA =200°C:
Formel für statische Verlustleistung:
2
Pon = ID
· R DSon ·
ton
T
[23]
(3.2)
Pon ...statische Verlustleistung [W]
ID ...Durchlassstrom von Drain to Source [A]
ton
T
...Tastverhältnis des PWM-Signals [1]
Näherungsformel für Dynamische Verlustleistung:
PSW = 0, 5 · VDS · ID · f S · (tr + t f )
[23]
(3.3)
PSW ...dynamische Verlustleistung [W]
VDS ...Spannung von Drain to Source [V]
f S ...Schaltfrequenz PWM-Signal [Hz]
tr + t f ...Signal Anstiegs- und Fallzeiten [s]
Für die Berechnung werden folgende Werte verwendet:
• Motorspannung 48V
• Nennstrom bei 200°C ist 1,88A
• Tastverhältnis der PWM beträgt 0,9
• Signal Anstiegs- und Fallzeit beträgt zusammen 151ns
• RDSon bei T J =225°C beträgt 0,44Ω
Chris Bauer
22
3.2. Auswahl geeigneter Hochtemperaturbauteile
Das Tastverhältnis beträgt im Betrieb maximal 0,9 und wird deshalb für die Worst Case
Berechnung verwendet. Im Unterabschnitt 5.1.2 wird auf den Maximalwert des Tastverhältnisses genauer eingegangen.
Statische Verlustleistung: Pon = (1, 88A)2 · 0, 44Ω · 0, 9 = 1, 4W
Dynamische Verlustleistung: PSW = 0, 5 · 48V · 1, 88A · 50.000Hz · 151ns = 0, 34W
Es ergibt sich somit eine Gesamtverlustleistung von:
PV = PC + PSwitching = 1, 4W + 0, 34W = 1, 74W
K
Mit dem oben angenommenen thermischen Übergangswiderstand ΘJA von 5 W
lässt
sich die Erwärmung der Halbleiterschicht bei einer Umgebungstemperatur von 200°C
errechnen:
TJ = TA + ΘJ A · P = 200◦ C + 5
K
· 1, 74W = 208, 7◦ C
W
Es sind somit genügend Reserven vorhanden, weshalb der MOSFET für den Maxon EC
22 HD Motor in der 6-Puls-Brückenschaltung verwendet werden kann.
Bei der Verlustleistung kommt als günstiger Faktor noch hinzu, dass der Motor mit
Blockkommutierung betrieben wird. In dieser Betriebsart haben die MOSFETs kurze
Schaltpausen, da jeweils nur zwei Halbbrücken gleichzeitig aktiv sind. Somit ist die
über die Zeit gemittelte Verlustleistung noch etwas geringer.
3.2.3. Halbbrücken-Leistungstreiber
Definition: In einer Halbbrücke bedeutet Low-Side-MOSFET, dass der FET eine Last
gegen die Masse (GND) durchschaltet. Der High-Side-MOSFET hingegen schaltet die
Last an die Versorgungsspannung durch. [22]
Für den Betrieb von MOSFETs reicht eine Spannung von 3,3V und der Strom von
max. 20mA, die der Mikrocontroller liefern kann, nicht aus. In diesem Kapitel wird
auf die Notwendigkeit und die Verfügbarkeit von passenden Leistungstreibern für den
Hochtemperatur Brushless DC Servoregler eingegangen.
Chris Bauer
23
3.2. Auswahl geeigneter Hochtemperaturbauteile
Leistungstreiber stellen die Schnittstelle zwischen steuernder Elektronik und der Leistungselektronik dar.
Zusammenfassend ergeben sich für die Halbbrücken-Leistungstreiber folgende Aufgaben:
• Spannungsanpassung von steuernder Elektronik an Leistungselektronik
• Bereitstellen des hohen Ladestroms für Gatekapazität des MOSFETs
• Anpassen des Potentials für den High-Side N-FET der Halbbrücke
• Kurzschlussschutz der Halbbrücke in Hardware
• Totzeit zwischen den Schaltvorgängen bereitstellen
Bei den verwendeten Hochtemperatur MOSFETs von Cissoid handelt es sich um Logiclevel FETs. Das bedeutet, ein Potential von 5V zwischen Gate und Source reicht für
das Schalten aus.
Der TI Hochtemperatur Mikrocontroller liefert an den I/O Pins 3,3V als Ausgangsspannung. Der Widerstand RDSon ist somit noch größer als im voll durchgeschalteten
Zustand, was hohe Verlustleistungen zur Folge hat. Außerdem ist ein Betrieb von MOSFETs direkt an einem Controller-Pin nur dann möglich, wenn es sich um keinen dynamischen Betrieb handelt. Die Verlustleistung beim Schalten ist direkt proportional
zur Schaltgeschwindigkeit. Damit ein MOSFET schnell schalten kann, sind kurzfristig
große Ströme notwendig, um die Gatekapazität aufzuladen. Treiberschaltungen können kurzfristig Strome von bis zu 1,5A zum Laden der Gatekapazitäten bereitstellen.
Ein geeigneter Hochtemperatur Leistungstreiber ist für die gewählten Hochtemperatur
MOSFETs von Cissoid vom selben Hersteller erhältlich und bietet die in Tabelle 3.3 genannten Ausstattungsfeatures.
Eine wichtige Funktion des Leistungstreibers ist das Anpassen des Spannungspegels
für das Gate des High-Side N-Kanal MOSFETs. Hierfür ist eine Boostrapschaltung notwendig. Auf die Bootstrapschaltung wird in Unterabschnitt 5.1.2 näher eingegangen.
Der Hochtemperatur Leistungstreiber von Cissoid hat bereits die für eine Bootstrapschaltung notwenige Diode integriert. Somit müssen am Leistungstreiber lediglich Kondensatoren und Widerstände dimensioniert werden.
Der Halbbrücken-Treiber ist für eine Brückenspannung von 50V ausgelegt und somit
für den Maxon Motor geeignet. Für die PWM-Frequenz ist der Leistungstreiber eben-
Chris Bauer
24
3.2. Auswahl geeigneter Hochtemperaturbauteile
Versorgungsspannung
Steuerspannung Gate
Maximale Brückenspannung
Ladestrom Gate
Temperaturbereich
Treiberart
Besonderheiten
Cissiod CHT-Hyperion
5V
5V
50V
1A
-55°C bis + 225°C
N-Channel High-Side- und Low-Side-Treiber
- Integrierte Bootstrapschaltung mit Diode
- Kurzschlussschutz der Halbbrücke
- Unterspannungsschutz
Tabelle 3.3.: Daten Cissiod CHT-Hyperion Halfe Bridge Driver
falls geeignet. Laut Datenblatt kann der Treiber eine 3nF Gatekapazität mit 500kHz
Frequenz ausreichend schnell schalten. Der von Cissoid verwendete MOSFET weist eine Gatekapazität von lediglich 850pF auf und die Schaltfrequenz beträgt nur 50kHz.
Somit sind die Leistungstreiber für diese MOSFETs mit den erforderlichen Betriebsparametern optimal geeignet und können verwendet werden.
Von anderen Hochtemperatur-Elektronikherstellern sind derzeit keine Leistungstreiber
für N-Kanal MOSFETs, mit den benötigten Features, erhältlich.
3.2.4. Strommessung
Die Strommessung im Brushless DC Servoregler ist für die Überwachung des Motorbetriebes, oder um eine Drehmoment Regelung über den Strom zu realisieren, notwendig. Der Stromverbrauch des Motors stellt sich über die angelegte Spannung und die
aktuelle Drehzahl des Polrades sowie den Lastzustand ein. Die Spannung kann über
das Tastverhältnis des PWM-Signals angepasst werden. Die Strommessung ist vorerst
hauptsächlich für eine Überlastschutzfunktion notwendig.
Für die Strommessung kommen grundsätzlich zwei verschiedene Möglichkeiten in
Frage: die berührungslose Strommessung und die Messung mittels Shuntwiderstand
im Stromkreis.
Die berührungslose Messung kann mit Hall-Sensoren oder Magnetoresistiven-Sensoren
realisiert werden. Hall-Sensoren für den Einsatztemperaturbereich werden im Maxon
EC 22 HD Motor für Bestimmung der Rotorlage verwendet. Maxon gibt jedoch keine
Auskunft über die Art oder den Hersteller der verwendeten Hall-Sensoren.
Auch für die berührungslose Messung mittels Magnetoresistiven-Sensoren wurden für
Chris Bauer
25
3.2. Auswahl geeigneter Hochtemperaturbauteile
den geforderten Einsatztemperaturbereich keine Bauteile gefunden.
Für die Messung mittels Shuntwiderstand steht von TI ein Hochtemperatur CurrentShunt-Monitor zur Verfügung. Dieser verstärkt das Signal und bietet einige wichtige
Funktionen, auf welche im Abschnitt 5.2 näher eingegangen wird.
Von TI ist ebenfalls ein Niedertemperaturderivates Halbleiterbauteil des Current-ShuntMonitors erhältlich, welches zur Entwicklung und Dimensionierung der Schaltung verwendet wird.
Samples
Von der Firma Texas Instruments wurden, nachdem der Current-Shunt Monitor INA271HT bei der Recherche gefunden wurde, zeitnah Samples angefordert. Innerhalb eines
Monats wurden zwei solcher Hochtemperatur ICs als Sample geliefert.
In Abbildung 3.3 sind die gelieferten Hochtemperatur-Samples von TI zu sehen.
Abbildung 3.3.: Current-Shunt-Monitor - TI INA271-HT
An dieser Stelle noch einmal ein Dankeschön an die Firma Texas Instruments.
Chris Bauer
26
3.2. Auswahl geeigneter Hochtemperaturbauteile
3.2.5. Passive Bauteile
Passive Hochtemperaturbauteile werden erst nachdem eine prototypische Platine aus
FR4 mit den Hochtemperatur ICs bestückt wurde bestellt. Zuvor kann mit Standartelektronikderivaten passiven Bauteilen die Dimensionierung verifiziert werden. Die
Problematik liegt hierbei in der Mindestabnahmemenge der passiven Komponenten.
Kondensatoren
Hochtemperatur MLCC SMD-Kondensatoren sind von der Firma Novacap und Kemet
in verschiedenen Ausführungen erhältlich. Diese Kondensatoren wurden bereits in der
Projektarbeit vom 4. Semester auf dem Hochtemperatur Embedded System verbaut.
Mit diesen Kondensatoren können Schwankungen der Spannungsversorgung vor ICs
gefiltert werden oder RC-Filter aufgebaut werden. [24]
Beim Betrieb eines Gleichstrommotors sind zusätzlich größere Kapazitäten für das Puffern der Versorgungsspannung notwendig. Aufgrund der langen Anschlussleitungen
der Versorgungsspannung der Sonde (bis zu 5km Länge) ist dieser Puffer umso wichtiger. Ein Elektromotor würde einen Einbruch der Versorgungsspannung problemlos
verkraften, die weiteren Elektronikkomponenten in der Sonde reagieren jedoch sehr
sensibel auf Schwankungen in der Versorgungsspannung. Aus diesem Grund müssen
zu den SMD-Keramikvielschicht-Kondensatoren weitere Kondensatoren mit einer größeren Kapazität die Versorgungsspannung stabilisieren.
Von Kemet sind bedrahtete Keramik Kondensatoren mit Kapazitäten im einstelligen
µF Bereich für Umgebungstemperaturen von bis zu 260°C erhältlich. [16] Von Green
Tech sind Kondensatoren mit einer Kapazität von 220µF bei 200°C und 60V Spannung
erhältlich. [7]
Die Firma Evans Capacitor bietet ebenfalls eine Hochtemperatur Bauserie bis + 200°C
an. Es sind Kondensatoren mit einer Kapazität von 220µF und 60V bei 200°C, sowie
470µF und 45V bei 200°C Umgebungstemperatur, erhältlich. Die Spannungsfestigkeit
der Kondensatoren sinkt bei dieser Bauserie mit der Umgebungstemperatur. [5]
Ein anderer Ansatzpunkt um die Spannungsversorgung zu puffern wären evtl. Akkus,
welche zur Versorgungsspannung parallel geschaltet werden. Dies hätte den weiteren
Vorteil, dass die Versorgungsspannung kurzfristig komplett ausfallen könnte. Akkus
für diese Umgebungstemperaturen wurden bislang jedoch noch nicht ergründet.
Chris Bauer
27
3.2. Auswahl geeigneter Hochtemperaturbauteile
Widerstände
Für den Hochtemperatur Servoregler sind Widerstände an verschiedenen Stellen erforderlich. Beispielsweise werden Pullupwiderstände, Shuntwiderstände, Widerstände für Spannungsteiler, Widerstände als Vorwiderstand zwischen Gate und Treiber IC
sowie Widerstände für Filterschaltungen benötigt.
Die Firma SRT Resistor Technologie bietet eine große Produktpalette an SMD- sowie
bedrahteten Widerständen. Hierbei sind ebenfalls Widerstände mit großer Belastbarkeit bei 200°C Umgebungstemperatur vorhanden. Diese können als Shuntwiderstände
für die Strommessung des Regelkreises verwendet werden.
Dioden
Für den Leistungsteil sind neben den Schaltern (MOSFETs) auch Freilaufdioden erforderlich. Diese verhindern die beim Schließen der Schalter entstehenden Induktionsspannungen. Hierzu werden die Dioden in Sperrichtung parallel zu den MOSFETs angebracht.
Die verwendeten Freilaufdioden müssen von der Sperrspannung an die Motorversorgungsspannung angepasst sein. Ebenfalls muss die Strombelastbarkeit in Durchlassrichtung an den Motor angepasst sein. Dies bedeutet beim verwendeten Maxon EC 22
HD Motor eine Strombelastbarkeit von ca. 2A bei 200°C Umgebungstemperatur.
Dieser entscheidende Parameter der Strombelastbarkeit in Durchlassrichtung (Forward
Current) ist Ausschlusskriterium für viele Hochtemperatur Dioden mit bis zu 200°C
Einsatztemperatur. Die Suche der Dioden wurde hierbei auf Gehäuse, welche für den
Einsatz in der Sonde (Platz stark begrenzt) geeignet sind begrenzt. Zum Durchlassstrom Beispielhaft die Abbildung 3.4 aus dem Datenblatt der Semikron SBH 1245TL
Diode.
Bei dieser Diode handelt es sich um eine Hochtemperatur-Schottky-Diode welche bis
zu einer Junction Temperatur von +200°C eingesetzt werden kann. Der Durchlassstrom
beträgt bei einer Umgebungstemperatur von 75°C 12A. Es ist jedoch im Diagramm ersichtlich, dass bei 200°C Umgebungstemperatur der Durchlassstrom gegen Null geht.
Eine weitere zusätzliche Einschränkung bei dieser Schottky-Diode ist die zu geringe
Sperrspannung von 45V. Der Motor könnte somit nicht mit der Nennspannung von
48V betrieben werden.
Viele weitere als Hochtemperatur erhältliche Dioden sind nur bis zu einer Junction
Chris Bauer
28
3.2. Auswahl geeigneter Hochtemperaturbauteile
Abbildung 3.4.: Durchlassstrom über der Temperatur - Semikron SBH 1245TL [30]
Temperatur von +175°C einzusetzen und somit ebenfalls ungeeignet. Bereits bekannte
Hersteller von Hochtemperaturbauteilen bieten keine für diesen Anwendungsfall geeignete Dioden an.
Lediglich der Hersteller Clifton aus Estland bietet passende Hochtemperatur-Dioden,
welche für diese Randbedingungen ausgelegt sind, an. Der Hersteller produziert hauptsächlich Halbleiter für Leistungselektronik aus Galliumarsenid. Bei den Dioden handelt es sich um GaAs p-i-n Gleichrichter-Dioden. Diese sind sehr schnell und über einen
Temperaturbereich von -65°C bis + 260°C einsetzbar. [6]
Die zusätzliche Randbedingung des begrenzten Platzvolumens für die Elektronik kann
mit Dioden dieses Herstellers ebenfalls eingehalten werden. Die Dioden sind in bedrahteten Hermetic Packages oder in einer SMD-Variante erhältlich.
Wie in der Abbildung 3.5 zu erkennen ist, sind bei 200°C Umgebungstemperatur noch
genügend Reserven, was den Durchlassstrom betrifft, vorhanden. Die Reverse Recovery Time dieser Dioden beträgt 30ns. Diese sind sehr schnell und somit gut für den
Anwendungszweck als Freilaufdiode einzusetzen.
Zum derzeitigen Zeitpunkt wurden noch keine Preisauskünfte sowie Lieferzeiten des
Herstellers bekannt gegeben. Die Anfragen diesbezüglich bleiben unbeantwortet.
Chris Bauer
29
3.3. Hochtemperatur Platine
Abbildung 3.5.: Clifton GaAs Power Diode Hermetic Package [6]
Lediglich über die Firma Micross Components Ltd. konnte per E-Mail Kontakt aufgenommen werden. Die Firma Clifton selbst antwortet nicht auf E-Mails sowie Anfragen
über das Kontaktformular der Homepage. Die Firma Micross Components Ltd. ist eine
Partnerfirma zu Clifton Semiconductor und verarbeitet bzw. integriert die Halbleiterchips von Clifton in standardisierten Gehäusen.
3.3. Hochtemperatur Platine
Die Firma Brockstedt, welche die Hochtemperaturplatine der Projektarbeit im 4. Semester gefertigt hat, bietet ebenfalls eine Hochtemperaturplatine mit 70µm Kupferstärke an. Diese Kupferstärke ist für die Leistungselektronik deutlich besser geeignet. Die
Ströme des Maxon EC 22 HD Motors betragen bei 200°C ca. 2A im Nennbetrieb und
8A im Anlauf. Die Leiterbahnen können durch die dickere Kupferschicht dünner dimensioniert werden, weshalb die komplette Platine des Leistungsteils kleiner ausfallen
kann.
Ein Layout für die Hochtemperaturelektronik wurde noch nicht erstellt. Ohne Layout
kann keine genaue Preisangabe von den Herstellern gegeben werden. Der Preis kann
aber ungefähr mit dem der Hochtemperaturplatine aus der Projektarbeit des 4. Semesters verglichen werden. [2] Dieser liegt bei einer Stückzahl von 1-4 Stück bei einem
Einzelpreis von ca. 170€ mit zusätzlichen Nebenkosten von ca. 540€. Die Platine des
Hochtemperatur Embedded Systems besteht aus einem Polyimid-Glas-Trägermaterial
Chris Bauer
30
3.4. Lötzinn
(bis 220°C geeignet) mit innenliegendem Kupfer-Invar-Kupfer Layer für die Anpassung der Ausdehnungskoeffizienten an die Halbleiterbauteile.
3.4. Lötzinn
Als Lötzinn kann bleifreies Lot (Sn96,5 Ag3 Cu0,5) mit einer Schmelztemperatur von
217°C oder ein Hochtemperaturlot (Pb 93 Sn 5 Ag 2) mit einer Schmelztemperatur
von 296°C eingesetzt werden. Da im Leistungsteil hauptsächlich ICs mit Through Hole Technology eingesetzt werden, kann hier auch das schwieriger zu verarbeitende
Hochtemperaturlot verwendet werden. Es müsste jedoch in Praxistests die Eignung
der Temperaturbelastung (Umgebung + warme ICs) mit zusätzlicher Vibration geprüft
werden. Die Firma Brockstedt empfiehlt für den Einsatz bis 200°C Umgebungstemperatur das oben genannte bleifreie Lot. Es muss sich in ersten Praxistests zeigen, welches
der beiden genannten Lote besser geeignet ist.
3.5. Notwendigkeit Standard Elektronik
Mit der Hochtemperaturkomponenten-Suche stellt sich neben der Frage ob geeignete Komponenten erhältlich sind, ebenfalls die Frage, wie lange die Lieferzeiten dieser
Bauteile sind. Die Hochtemperatur MOSFETs und Treiber von Cissoid haben eine Lieferdauer von ca. 12 Wochen. Aus diesem Grund wurde schon zu Beginn klar, dass die
entsprechenden Bauteile für die hohen Temperaturen während der Bachelorarbeit nicht
mehr geliefert werden. Um dennoch den Mikrocontroller während der Bachelorarbeit
programmieren zu können und erste Tests mit dem Hochtemperaturmotor zu ermöglichen, wurde eine Elektronik auf Basis von Standard-Komponenten aufgebaut. Das
Layout der Hochtemperaturelektronik wird in nachfolgenden Arbeiten erstellt.
In den folgenden Kapiteln wird auf die verwendeten Standard-Bauteile eingegangen,
sowie das Schaltungslayout und die Dimensionierung erläutert.
Chris Bauer
31
4. Standardelektronik
4.1. Anforderungsanalyse – Pflichtenheft
Für die Auswahl der Standardelektronikkomponenten lässt sich ebenfalls ein Pflichtenheft erstellen. Es wird lediglich der Leistungsteil der Elektronik aus Standardelektronikkomponenten aufgebaut. Der Hochtemperatur-Mikrocontroller von TI wird weiterhin für die Ansteuerung des Leistungsteils verwendet.
Die Anforderungen nach Regelaspekten bleiben also gleich der Hochtemperaturelektronik.
Anforderungen an Elektronik nach Regelungsaspekten:
• Für Drehzahlregelung min 3 PWM Ausgänge
• AD-Wandler Eingang für Strommessung
• Interruptfähige Eingänge für Hall-Sensoren
• 3 Ausgänge um Halbbrücken anzusteuern
• Temperaturmessung und Anpassung der Regelung nach Temperatureinflüssen
• Kurzschlussschutz in Hardware durch Halbbrückentreiber
Zusätzlich sollte die Ansteuerung der Halbbrückentreiber ähnlich oder gleich der Hochtemperatur-Halbbrücken sein, um die Änderungen der Software möglichst gering zu
halten.
Des weiteren sollten die einzelnen Hardwaremodule, beispielsweise die Strommessung
ähnlich oder bestenfalls aus derivaten Komponenten aufgebaut werden.
Die Anforderungen nach den Motordaten ändern sich geringfügig, da an den Standard
Elektronikkomponenten am Anfang der Maxon EC 22 Motor mit anderen Motorkenndaten eingesetzt werden soll.
Chris Bauer
32
4.2. Auswahl geeigneter Bauteile
Anforderungen nach Motordaten:
• Maximal zu kommutierende Drehzahl beträgt ca. 14000
U
min
• Maximaler Dauerstrom Maxon EC 22 3,33A
• Maximaler Anlaufstrom Maxon EC 22 an 20V 25,1A
• PWM Frequenz für Blockkommutierung beträgt 50kHz
• Nennspannung des Motors 48V, jedoch reduziert auf 20V wegen Drehzahl
Die Standardelektronik, insbesondere die MOSFETs, soll von der maximalen Strombelastbarkeit überdimensioniert werden. Somit könnten die MOSFETs in späteren Versuchen bei einer erhöhten Umgebungstemperatur (bis 200°C) auf ihre Funktion überprüft werden. Die Preise für die Standard Komponenten unterscheiden sich lediglich
im Cent-Bereich, weshalb eine solche Möglichkeit offen gehalten werden soll.
4.2. Auswahl geeigneter Bauteile
4.2.1. MOSFETs
Als MOSFETs werden in der Hochtemperaturelektronik N-Kanal MOSFETs mit Logic
Level Steuerspannung eingesetzt. In der Standard Elektronik sind keine Logic Level
MOSFETs für eine Spannung von 48V erhältlich. Aus diesem Grund muss hier ein
MOSFET mit 10V Gate Steuerspannung (VGS ) verwendet werden und die Leistungstreiber hierfür passend ausgelegt sein.
Ein für den Maxon EC 22 Motor passender MOSFET ist von der Firma International
Rectifier erhältlich. Es handelt sich um einen Standard N-Kanal MOSFET mit der Bezeichnung AURIF1010EZ.
Nachfolgend werden die wichtigsten Features dieses Bauteils zusammengefasst [26]:
• Spannungsfestigkeit von Drain to Source V( BR) DSS = 60V
• Temperaturbereich T J = -55°C bis + 175°C
• Der Widerstand RDSon beträgt maximal 8,5mΩ
• Steuerspannung VGS = 10V
Chris Bauer
33
4.2. Auswahl geeigneter Bauteile
• Continous Drain Strom bei 25°C beträgt 84A (Silicon Limited)
• Continous Drain Strom bei 25°C durch Package limitiert ist 75A
• Integrierte Freilaufdiode mit Continous Source Current = 84A
• Die Einschaltverzögerung (On-Time (td−On + tr )) beträgt 109ns
• Die Ausschaltverzögerung (Off-Time (td−O f f + t f )) beträgt 92ns
• Erhältlich in drei versch. Gehäusen, verwendet wird das TO-220AB Package
Die MOSFETs sind bei Reichelt zu einem Stückpreis von 1,066 € erhältlich.
Für die aktuelle Anwendung sind die MOSFETs deutlich überdimensioniert. Dies ist
jedoch notwendig, da sich der maximal zulässige Drainstrom mit steigender Umgebungstemperatur verringert. So ist laut Datenblatt bei TC =100°C noch 60A Continous
Drain Current möglich. Somit sind die MOSFETs für Tests bei erhöhten Umgebungstemperaturen nicht mehr so deutlich überdimensioniert.
Die Verlustleistung ist bei diesem MOSFET im Vergleich zum Hochtemperatur MOSFET von Cissoid deutlich geringer, da der Widerstand von Source zu Drain kleiner ist.
Die Verlustleistung bei diesen MOSFETs setzt sich aus statischer Verlustleistung siehe
Gleichung 3.2, der dynamischen Verlustleistung, siehe Gleichung 3.3 und der Verlustleistung der Diode zusammen.
Ohne die Verlustleistung der Diode kommt man mit:
• 3,3A Dauerstrom und 48V Spannung
• PWM Frequenz von 50kHz mit einem Tastverhältnis von 0,9
auf eine Gesamtverlustleistung von 0,65W.
Die Berechnung der Verlustleistung an der Diode hängt von vielen weiteren, nur schwer
abschätzbaren, Faktoren ab. [28]
Generell berechnet sich die Verlustleistung an einer Diode über das Produkt von der
Spannung, die über der Diode abfällt, sowie dem Strom von dem sie durchflossen wird.
Für die gemittelte Gesamtverlustleistung ist jedoch die Zeit, in der die Diode leitet entscheidend. Diese Zeit ist nicht mit dem Tastverhältnis gleich zu setzten.
Die Diode muss in der Halbbrücke die entstehenden Induktionsspannungen leiten, die
beim Schließen der Schalter entstehen. Aufgrund der großen Leistungsreserven ist die
Berechnung der Verlustleistung an der Diode momentan zu vernachlässigen.
Chris Bauer
34
4.2. Auswahl geeigneter Bauteile
4.2.2. Halbbrücken-Leistungstreiber
Die Firma International Rectifier bietet ebenfalls zahlreiche MOSFET-Treiber ICs an. Die
Treiber mit der Bezeichnung IRS21844 sind ebenfalls bei Reichelt zu einem Stückpreis
von 3,07 € erhältlich und mit den gewählten MOSFETs kompatibel.
Diese Halbbrückentreiber lassen sich ähnlich wie die Hochtemperatur-Treiber ansteuern und bieten eine integrierte einstellbare Totzeit von 400ns bis 5000ns. Sie verfügen
über einen Bootstrapkreis um die obere Gatespannung zu erzeugen. Zudem haben sie
genügend Ausgangsleistung um die MOSFETs schnell anzusteuern. [25]
4.2.3. Strommessung
Für die Strommessung wird die wie in Unterabschnitt 3.2.4 beschriebene Methode, der
Messung via Shuntwiderstand, gewählt. Hierbei kommt ein derivates Bauteil, der IC
INA271 von Texas Instruments zum Einsatz.
Der Current-Shunt-Monitor hat einen Verstärkungsfaktor von 20 und bietet einige, für
die gepulste Strommessung, nützliche Ausstattungsfeatures.
Im folgenden Kapitel 5 wird auf die Dimensionierung der Schaltung des Leistungsteils
genauer eingegangen.
Chris Bauer
35
5. Schaltungsentwicklung
In diesem Kapitel wird auf die Dimensionierung und das Schaltungslayout, des in einzelne Module gegliederten Leistungsteils, eingegangen. Es handelt sich hierbei um die
Schaltungsentwicklung mit den Standard-Elektronikkomponenten.
5.1. Halbbrücken
Für den Aufbau einer 6-Puls-Brückenschaltung werden drei identisch aufgebaute Halbbrücken benötigt. Eine Halbbrücke besteht aus einem Low-Side MOSFET, welcher die
Motorspulen gegen Masse schalten kann und einem High-Side MOSFET, welcher die
Motorspulen gegen die Versorgungsspannung durchschaltet. Des weiteren werden Treiber IC und passive Bauteile benötigt.
5.1.1. MOSFETs
Als MOSFETs werden die in Unterabschnitt 4.2.1 gewählten MOSFETs AURIF1010EZ
von International Rectifier (IR) gewählt. Beim Layout um die MOSFETs ist darauf zu
achten, dass die stromführenden Leitungen zum und vom MOSFET zum Motor ausreichend dick dimensioniert sind. Ebenfalls sollte die Spannungsversorgung des Motors
mit Kondensatoren ausreichend gepuffert werden. Es wird hierfür ein Elektrolytkondensator mit einer Kapazität von 2200µF und einer Spannungsfestigkeit von 63V vorgesehen. Zusätzlich wird ein kleinerer Keramikvielschichtkondensator mit 100nF Kapazität zu diesem parallel geschaltet. Diese Kondensatoren, zum Puffern der Halbbrückenspannung, sind im Schaltplan der Abbildung 5.1 nicht ersichtlich. Der als MOSFET1
bezeichnete Schalter ist der High-Side MOSFET. Dieser ist mit Drain an der Versorgungsspannung und mit Source an die Motorwicklung angeschlossen. Beim Low-Side
MOSFET ist ersichtlich, dass Drain an die Motorwicklung und Source an Masse angebunden ist. Somit kann die Motorwicklung auf Plus und Masse geschaltet werden.
Chris Bauer
36
5.1. Halbbrücken
5.1.2. Treiberschaltung
Für die Treiberschaltung der High- und Low-Side N-Kanal-MOSFETs werden folgende
Bauteile benötigt:
• N-Kanal Treiber IC
• Bootstrapdiode
• Kondensatoren
• Widerstände
Als Halbbrücken-Treiber IC wird das Bauteil IRS21844 von International Rectifier eingesetzt. Außer diesem IC sind noch weitere für den Betrieb notwendige Bauteile erforderlich. Auf die Dimensionierung und die Funktionsweise der Schaltung, welche in
Abbildung 5.1 ersichtlich ist, wird im folgenden eingegangen.
Die Bootstrap Schaltung
Die Bootstrap Schaltung wird benötigt, um das Potential zum Schalten des High-Side
MOSFETs zu erzeugen. Die Schaltung besteht aus einer in Abbildung 5.1 als D3 bezeichneten Bootstrapdiode und einem Bootstrapkondensator (hier als C9 bezeichnet),
welcher mit dem Massenpotential auf der Motorwicklung liegt.
Dadurch, dass der Kondensator auf dem Potential der Motorwicklung liegt, wird es
möglich den High-Side MOSFET durchzuschalten. Im durchgeschalteten Zustand liegt
Source des High-Side MOSFETs nahezu auf dem Spannungspotential der Versorgungsspannung. Am Massenpotential des Kondensators liegt daher ebenfalls die Versorgungsspannung an. Am Eingangspin VB (Spannung Bootstrap) des Treiber ICs liegt
nun 48V plus die Spannung des Bootstrapkondensators an, womit das notwendige
Spannungspotential von 10V von Gate to Source gegeben ist.
Hierdurch wird auch ersichtlich, weshalb die Bootstrapdiode benötigt wird. Ohne Diode würde sich der Bootstrapkondensator in Richtung der Spannungsquelle des Treiber ICs entladen, wenn der High-Side MOSFET durchschaltet. Aufgeladen wird der
Bootstrapkondensator über die Diode dann, wenn der Low-Side-MOSFET das Massepotential des Kondensators auf Masse zieht.
Chris Bauer
37
5.1. Halbbrücken
Abbildung 5.1.: Schaltungslayout Halbbrückentreiber
Dimensionierung Bootstrapschaltung
Die Bootstrapdiode muss ausreichend schnell sein und zudem einen großen Strom leiten können. Des weiteren muss sie eine Sperrspannung, welche größer ist als die Motornennspannung, aufweisen. Geeignet ist hierfür die Diode UF4002 von Vishay.
Die für den Bootstrapkreis maximale Belastung tritt bei einem Tastverhältnis von 0,9
auf. Dies bedeutet 90% der Periodendauer des PWM-Signals ist der High-Side MOSFET an, den Rest der Zeit der Low-Side FET. Mit einer PWM-Freuquenz von 50kHz
kann der Boostrapkondensator dann in einem Zeitfenster von 10% ·
1
50kHz
= 2µs geladen werden. Die Diode UF4002 hat eine Reverse Recovery Time von 50ns. Dies entspricht einem prozentualen Anteil von 50ns
2µs =2,5% der gesamten Ladedauer. Die Diode
ist somit schnell genug.
Die Dimensionierung des Bootstrapkondensators wird mit folgenden Formeln realisiert:
Chris Bauer
38
5.1. Halbbrücken
∆VBOOT = VDD − VF − VGSMI N
[29]
(5.1)
∆ VBOOT ... Spannungsänderung am Bootstrapkondensator [V]
VDD ...Versorgungsspannung Treiber IC [V]
VF ...Spannungsabfall über Bootstrapdiode [V]
VGSMI N ...Minimalspannung von Gate zu Source [V]
Q TOTAL = QGATE + ( ILKCAP + ILKGS + IQBS + ILK + ILKDIODE ) · tON + Q LS
[29] (5.2)
QTOTAL ...Gesamtladung pro Schaltvorgang [C]
QGATE ...Ladung Gate [C]
I LKCAP ...Leckstrom Bootstrapkondensator [A]
I LKGS ...Leckstrom Gate zu Source [A]
IQBS ...Ruhestrom Bootstrapschaltung [A]
I LK ...Leckstrom Boostrap IC [A]
I LKDIODE ...Leckstrom Bootstrapdiode [A]
tON ...Zeit in der High-Side MOSFET ein ist [s]
Q LS ...Ladungsmenge um Spannungslevel intern im Treiber zu ändern [C]
CBOOT =
Q TOTAL
∆VBOOT
[29]
(5.3)
CBOOT ...Kapazität des Bootstrapkondensators [F]
Die Werte zur Berechnung können aus den Datenblättern des MOSFETs, des Treiber
ICs und der Diode entnommen werden. [26] [25] [33]
Setzt man die Werte in Gleichung 5.2 ein, so erhält man:
Q TOTAL = 86nC + (0A + 200nA + 150µA + 50µA + 30nA) · 0, 9 · 20µs + 5nC = 94, 6nC
Der Leckstrom des Kondensators beträgt hier 0A, da ein Keramikvielschichtkondensator eingesetzt wird.
Die Spannungsversorgung des Treiber ICs wird auf ca. 12V festgelegt.
Chris Bauer
39
5.1. Halbbrücken
Die Diode hat einen Spannungsabfall von VF =1V und die Minimalspannung am Gate
des MOSFETs beträgt 10V, somit ergibt Gleichung 5.1:
∆VBOOT = 12V − 1V − 10V = 1V
Nun lässt sich mit Gleichung 5.3 die Minimalkapazität des Bootstrapkondensators errechnen:
CBOOT =
94, 6nC
= 94, 6nF
1V
Als Bootstrapkondensatoren wurden 100nF 0805 SMD Keramikvielschichtkondensatoren ausgewählt.
Widerstände am Treiber IC
Der Halbbrücken Treiber IRS21844 von IR verfügt über eine einstellbare Totzeit zwischen den Schaltvorgängen der High- und Low-Side MOSFETs.
Hierzu wird ein Widerstand zwischen den Eingangspin DT (Deadtime) und Masse angeschlossen. [25] Für die verwendeten MOSFETs reicht die geringste Totzeit von 400ns
zwischen den Schaltvorgängen aus, sodass der Ausgangspin direkt auf Masse gezogen werden kann. Hierfür wurde ein 0805 SMD-Lötpad vorgesehen und ein 0Ω 0805
SMD-Widerstand eingelötet. Somit kann zu einem späteren Zeitpunkt, wenn nötig, die
Totzeit einfach verändert werden kann.
Ein Widerstand zwischen den Ausgängen HO (High out) und LO (Low out) limitiert die maximal möglichen Ströme von Treiber IC an die Gates der MOSFETs. Hierdurch werden die Signalanstiegs- und Fallzeiten der MOSFETs begrenzt. Besonders
beim schnellen Abschalten können sehr hohe Induktionsspannungen von den Motorspulen erzeugt werden. Zusätzlich werden die EMV-Störungen durch ein langsameres
Ein- und Ausschalten minimiert. [22] Allerdings muss mit den langsameren Schaltzeiten auch eine größere dynamische Verlustleistung an den MOSFETs in Kauf genommen
werden, weshalb die Gate Widerstände nicht unnötig groß gewählt werden sollten. Die
Gate Widerstände werden in diesem Anwendungsfall auf 1A Gatestrom dimensioniert:
U
I
= 10V
1A = 10Ω.
Dieser Wert wurde grob festgelegt und kann bei Bedarf noch variiert werden.
R=
Chris Bauer
40
5.2. Strommessung
5.2. Strommessung
Für die Strommessung des Brushless DC Reglers wird ein Shuntwiderstand verwendet. Fließt ein Strom durch den Shuntwiderstand, so fällt an diesem proportional zum
Strom eine Spannung ab. Diese Spannung über dem Shuntwiderstand wird mit dem
AD-Wandler des Mikrocontrollers ausgewertet. Mit dem ohmschen Gesetz: U = R · I
kann dann, mit dem bekannten Widerstandswert, auf den Strom zurück gerechnet werden.
Um eine bessere Auflösung zu erhalten, wird das Signal verstärkt. Hierfür wird der
Current-Shunt-Monitor INA271 von TI verwendet. Dieser bietet außer der Verstärkung
noch weitere nützliche Features, auf die im folgenden eingegangen wird.
5.2.1. Current-Shunt-Monitor
Der verwendete Current-Shunt-Monitor INA271 von TI ist auch in der Hochtemperaturvariante INA271-HT erhältlich. Aus diesem Grund, kann die Schaltung zur Strommessung zu einem späteren Zeitpunkt von der Standard Elektronik ohne Änderungen
auf der Hochtemperaturelektronik umgesetzt werden.
Der verwendete Curren-Shunt-Monitor bietet folgende Ausstattungsfeatures:
• Verstärkung des Messsignals um den Faktor 20
• Überspannungsschutzfunktion für den Mikrocontroller
• Integrierte vorbereitete Schaltung um das Signal zu filtern
• Spannungsversorgung von +2,7V bis +18V
• Spannung am Ausgangspin begrenzt durch die Versorgungsspannung
Ohne Current-Shunt-Monitor IC müssten die Referenzspannungseingänge des ADWandlers auf das Spannungspotential des Shuntwiderstandes angepasst werden. Da
die Spannungsversorgung der 6-Puls-Brückenschaltung aufgrund des PWM-Signals
stark schwanken kann, ist dies nicht ohne Risiken für den Mikrocontroller zu realisieren. Mit Current-Shunt-Monitor ist das Anpassen am Mikrocontroller nicht notwendig
und es kann direkt der Ausgang mit dem AD-Wandler Eingang verbunden werden.
Chris Bauer
41
5.2. Strommessung
5.2.2. Dimensionierung der Schaltung
Der Shuntwiderstand muss für den Messbereich passend ausgelegt werden.
Hierbei ist auf folgende Parameter und Eigenschaften zu achten:
• Die Spannung, die über dem Shuntwiderstand abfällt, sollte gering sein
• Als maximaler Strom wird ca. 10A angenommen
• Der Widerstandswert sollte nicht zu klein werden
• Die Messauflösung sollte möglichst groß sein
Die Spannung, welche über dem Shuntwiderstand abfällt, reduziert die Motorspannung und sollte deshalb möglichst gering ausfallen. Der maximale Strom wurde auf
ca. 10A ausgelegt, da dies dem Anlaufstrom des Maxon EC 22 HD Motors bei 100°C
entspricht. Der Anlaufstrom liegt zudem nur sehr kurzfristig am Motor an. Einen größeren Stromverbrauch als 10A wird der EC 22 HD Motor im normalen Betrieb nicht
aufweisen. Der Nennstrom beträgt maximal 4,53A bei 25°C Umgebungstemperatur.
Shuntwiderstände sind nur in einem begrenzten Widerstandswertebereich als Standartbauteile erhältlich. Besonders in der Hochtemperaturelektronik ist das Problem
der begrenzen Widerstandswerte relevant. Kleinere Werte können durch Parallelschalten von Widerständen, bei gleichzeitig gesteigerter Belastbarkeit, erreicht werden. Das
realisieren eines Shuntwiderstandes auf der Platine mit Kupfer wird aufgrund der zusätzlichen Wärmebelastung für das Halbleitermaterial nicht gewählt.
Der kleinste erhältliche Shuntwiderstand in der Hochtemperaturelektronik hat einen
Wert von 50mΩ und ist von SRT erhältlich (siehe Abschnitt A.2).
Mit dem bekannten Strom von 10A und dem Widerstandswert von 50mΩ lässt sich
nun die Schaltung dimensionieren.
Mit einem Widerstandswert von 50mΩ würde am Shuntwiderstand eine Spannung
von 0,5V abfallen und eine Verlustleistung von P = I 2 · R = 10A2 · 50mΩ = 5W entstehen. Die Verlustleistung von 5W wäre selbst für den Hochtemperatur-Shuntwiderstand
bei erhöhten Temperaturen kein Problem (Abschnitt A.2 und [3]).
Die Spannung, welche am Widerstand abfällt ist jedoch zu groß, sodass der Widerstandswert durch Parallelschalten auf 25mΩ verringert wird. Zusätzlich wird die maximale Strombelastbarkeit hierdurch vergrößert.
Chris Bauer
42
5.2. Strommessung
Beim Dimensionieren der Schaltung um den Current-Shunt-Monitor müssen zusätzlich
der Verstärkungsfaktor des Current-Shunt-Monitors, sowie der Eingangsspannungsbereich des AD-Wandlers und die Auflösung beachtet werden.
Der Messbereich des AD-Wandlers ist von 0V bis 3,3V eingestellt und kann nicht verändert werden, da mit dieser Einstellung die Temperatur gemessen werden kann.
Um den Current-Shunt-Monitor auf der Platine an die Versorgungsspannung anzubinden, könnten verschiedene Versorgungsspannungen verwendet werden.
Spannungen am Current-Shunt Monitor
• Verfügbare Eingangsspannungen: 1,8V, 3,3V, 5V
• Maximale Ausgangsspannung für AD-Wandler: 3,3V
Bei der Auswahl ist zu beachten, dass die Ausgangsspannung am Ausgangspin durch
die Versorgungsspannung des ICs begrenzt wird. [14] Je nach Dimensionierung kann
dies ein limitierender Faktor sein.
Für das Übertragungsverhalten des Current-Shunt-Monitors lässt sich mit dem Widerstandswert und Verstärkungsfaktor eine Formel aufstellen:
Uout = ILast · RShunt · Gain
(5.4)
Uout ...Ausgangsspannung am Current-Shunt-Monitor [V]
I Last ...Strom welcher durch den Shuntwiderstand fließt [A]
RShunt ...Wert des Shuntwiderstands [Ω]
Gain ...Verstärkungsfaktor des Current-Shunt-Monitors [1]
Es ergibt sich mit den bekannten Werten folgende Ausgangsspannung am CurrentShunt-Monitor:
Uout = 10A · 25mΩ ·
20V
= 5V
V
Als Versorgungsspannung für den Current-Shunt-Monitor wird die 5V Spannungsquelle gewählt. Zwischen den Ausgang des Current-Shunt-Monitors und den Eingang
des AD-Wandlers wird ein Spannungsteiler aufgebaut, um den Messbereich für den
Chris Bauer
43
5.2. Strommessung
AD-Wandler anzupassen. Der Spannungsteiler (in Abbildung 5.2 an R1 und R2 zu sehen) wird auf einen Strom von 10mA dimensioniert.
Am unteren Widerstand R2 muss eine Spannung von 3,3V abfallen, somit ergibt sich
3,3V
= 10mA
= 3300Ω
Gewählt wurde 3,3kΩ nach der E12-Reihe.
−3,3V
Der zweite Widerstandswert R1 ergibt sich wie folgt: R1 = 5V10mA
= 1700Ω
Gewählt wurde 1,8kΩ nach der E12-Reihe.
Mit den eingesetzten Widerstandswerten berechnet, ergeben sich die korrigierten Spannungswerte von 3,24V an R2 und 1,76V an R1.
Somit können diese Widerstandswerte für den Spannungsteiler verwendet werden. Die
Auflösung am AD-Wandler des Mikrocontrollers lässt sich folgendermaßen berechnen:
ein Widerstandswert von: R2 =
U
I
Auflösung =
10A
mA
Strom
=
= 9, 6
Bits
1024bit
bit
Mit ca. 10mA ist die Auflösung für den Anwendungsfall genau genug.
Abbildung 5.2.: Schaltungslayout Current-Shunt-Monitor TI INA 271
Chris Bauer
44
5.2. Strommessung
Dimensionierung des Tiefpassfilters
Der Current-Shunt-Monitor wurde von TI für die Messung des Stroms zusätzlich mit
einem integrierten Sallen-Key-Tiefpassfilter, für das Ausgangssignal, ausgestattet (siehe Abbildung 5.3 rote Markierung). Dieser besteht aus einem Operationsverstärker,
einem Kondensator und einem Widerstand. Der Operationsverstärker sowie der Widerstand sind im Current-Shunt-Monitor integriert, sodass nur noch ein Kondensator
dimensioniert und angeschlossen werden muss.
Abbildung 5.3.: Sallen-Key Tiefpass 1. Ordnung aus INA271 Datenblatt [14]
Für die Dimensionierung des Sallen-Key-Tiefpassfilters wird wie im Elektrotechnikskript erläutert vorgegangen.[4]
Chris Bauer
45
5.2. Strommessung
A(s) =
1
1 + Wg · R1 · C1 · s
[4]
(5.5)
A(s) ...Übertragungsfunktion Tiefpassfilter
Wg ...Grenzfrequenz des Filters [Ω]
R1 ...Widerstand des Filters 1. Ordnung [Ω]
C1 ...Kondensator des Filters 1. Ordnung [F]
Mit:
a1 = Wg · R1 · C1
[4]
(5.6)
a1 ...Filterkoeffizient
folgt:
A(s) =
1
1 + a1 · s
[4]
(5.7)
Wird die Gleichung 5.6 nach C1 umgestellt, so kann der Kapazitätswert mit den bekannten Werten errechnet werden.
Bei allen Filtern 1. Ordnung sind die Filterkoeffizienten gleich eins (a1 =1). R1 ist von TI
bekannt und hat einen Wert von 96kΩ. Für Wg wird 2 · π · f g eingesetzt.
Die Grenzfrequenz fg wird für diese Anwendung mit
1
10
der PWM-Frequenz auf 5kHz
festgelegt. Mit dieser Grenzfrequenz kann der geglättete Stromwert des Servoreglers
mit dem AD-Wandler ausgelesen werden, ohne dass die Reaktionsgeschwindigkeit bei
schnell steigenden Stromwerten zu sehr eingeschränkt wird.
Durch Einsetzen der Werte in die umgestellte Gleichung 5.6 erhält man den Wert des
Kondensators:
C1 =
1
= 332pF
2 · π · 5000Hz · 96kΩ
Gewählt wurde ein 0805 SMD Keramikvielschicht Kondensator mit einer Kapazität von
330pF. Im Betrieb kann zu einem späteren Zeitpunkt der Kapazitätswert, wenn nötig,
variiert werden.
Ein weiteres Glätten der Stromwerte wird zusätzlich durch das Speichern und Mitteln
mehrerer AD-Wandlerwerte erreicht.
Chris Bauer
46
5.3. Anpassungen an Hochtemperatur Embedded System
5.3. Anpassungen an Hochtemperatur Embedded System
Für den Betrieb des Motors mit den Hall-Sensoren müssen auch Anpassungen auf der
Platine des Hochtemperatur Embedded Systems erfolgen.
5.3.1. Strommessung mittels AD-Wandler
Die Eingänge des im Mikrocontroller integrierten AD-Wandlers, auf dem Hochtemperatur Embedded System, sind alle für die Temperaturmessung vorbereitet. Um den
Stromwert des Servoreglers mit dem AD-Wandler auslesen zu können, muss der PT1000 sowie der hier als R11 bezeichnete Widerstand ausgelötet werden. Anschließend
kann am oberen Anschlusspin des ausgelöteten PT-1000 (siehe roter Pfeil in Abbildung 5.4) der Current-Shunt-Monitor für die Strommessung angeschlossen werden.
Abbildung 5.4.: Messbrücke mit PT-1000 für Temperaturmessung
5.3.2. Beschaltung der Hall-Sensoren
Die Beschaltung der Hall-Sensoren mit Open-Collector-Ausgang benötigt einen externen Pullupwiderstand damit das Signal der Sensoren auf Logisch 1 oder 0 gezogen
werden kann. [17]
Chris Bauer
47
5.3. Anpassungen an Hochtemperatur Embedded System
Zusätzlich stellte sich während des Betriebs mit dem Motor heraus, dass die HallSensorsignale mit Störsignalen überlagert sind. Aus diesem Grund wurde der Pullupwiderstand und ein RC-Glied als Filter möglichst nahe am Mikrocontroller positioniert
(siehe Abbildung 5.5). Somit können die Störungen bestmöglich direkt vor dem Mikrocontroller gefiltert werden.
Abbildung 5.5.: Hall-Sensorbeschaltung auf Hochtemperatur Embedded System
Für die Dimensionierung des RC-Gliedes wurde als Grenzfrequenz 5kHz gewählt. Dies
entspricht einem
1
10
der PWM-Frequenz der Leistungselektronik. Die auftretende Kom-
mutierungsfrequenz liegt mit ca. 1,3kHz ausreichend unter der Frequenz des RC-Gliedes,
damit die Hall-Sensorwerte noch korrekt ausgelesen werden können.
Die Bauteile lassen sich mit folgender Formel dimensionieren:
fg =
1
2·π·R·C
[4]
(5.8)
Als Kapazitätswert des Kondensators wurde 100nF gewählt. Somit lässt sich nach dem
Umstellen der Gleichung 5.8 nach R der Wert des zu verwendenden Widerstands errechnen.
Chris Bauer
48
5.4. Anschluss der Leistungselektronik am Mikrocontroller
R=
1
= 318, 3Ω
2 · π · 5000Hz · 100nF
Gewählt wurde ein Wert von 330Ω aus der E-12 Reihe. Mit der Gleichung 5.8 lässt sich
die korrigierte Grenzfrequenz errechnen:
fg =
1
1
=
= 4822, 9Hz
2·π·R·C
2 · π · 330Ω · 100nF
Dieser Wert weicht mit dem gewählten Widerstandswert nur gering von der gewünschten Frequenz ab, kann aber, wenn nötig, später nochmals korrigiert werden. Die Grenzfrequenz sollte jedoch nicht zu stark nach unten verändert werden. Durch eine zu tiefe Grenzfrequenz kann das Auslesen der Hall-Sensoren für die Kommutierung beeinträchtigt werden, da die Signale evtl. Zeitverzögert am Mikrocontroller anliegen (auf
die Kommutierung wird in Unterabschnitt 7.1.1 näher eingegangen).
5.4. Anschluss der Leistungselektronik am Mikrocontroller
Die Leistungselektronik wird mit einem 10-poligen Stecker an das Hochtemperatur
Embedded System angeschlossen. Ein direktes Verlöten ist für einen Einsatz in der
Bohrlochsonde unabdingbar, in der Testphase jedoch nicht notwendig und eher als
praktisch anzusehen.
In Abbildung 5.6 ist die Belegung des Steckers aufgezeigt.
Abbildung 5.6.: Steckerbelegung Anschluss Mikrocontroller
An den Anschlüssen GIO Port A.0 bis A.2 sind die drei Hall-Sensoren für das Auslesen
der Motorposition angeschlossen. An GIO Port A.3 bis A.5 sind die Anschlusspins SD
Chris Bauer
49
5.4. Anschluss der Leistungselektronik am Mikrocontroller
des Leistungstreibers angeschlossen. Mit diesen wird der Leistungstreiber mit Logisch
1 aktiviert. Die Ausgänge des Halbbrückentreibers (HO und LO) werden dann mit dem
Signal IN (siehe Abbildung 5.1) entsprechend durchgeschaltet.
An die Eingänge der Leistungstreiber (IN) werden die Ausgänge des HET (High End
Timer) des Mikrocontrollers angeschlossen um ein PWM-Signal auf den Leistungstreiber zu übertragen. Hierbei werden die MOSFETs komplementär durchgeschaltet, was
notwendig ist, damit der Bootstrapkondensator aufgeladen wird.[25]
Die Motorwicklungen und die Versorgung der Hall-Sensoren sowie die Hall-Sensorsignale selbst werden wie in Abbildung 5.7 aufgeführt an die Platine angeschlossen.
Anstelle einer Steckverbindung kommt hier jedoch eine Schraubverbindung zum Einsatz.
Abbildung 5.7.: Steckerbelegung Anschluss BLDC Motor
Chris Bauer
50
6. EMV Probleme / EMV Schutz
6.1. EMV Probleme durch das Schaltungslayout
Bei den Motortestläufen kam es zu Fehlfunktionen des Motors, welche auf Störsignale
auf den Hall-Sensorwerten zurückzuführen sind.
Wie in Kapitel Unterabschnitt 7.1.1 beschrieben wird eine Fehlerüberprüfung der HallSensorsignale durchgeführt. Diese Fehlerüberprüfung greift derzeit als einzige Sicherheit in den Programmablauf ein, weshalb die Fehlerursache bei den Hall-Sensorsignalen
zu suchen ist.
Zur Überprüfung wurde das Signal der Hall-Sensoren mit einem Oszilloskop nachgemessen (siehe Abbildung 6.1). Wie zu erkennen ist sind deutlich Störsignale auf dem
Signal, wenn dieses auf Masse liegt, zu sehen. Die Störimpulse werden stärker, wenn
der Motor mit mehr Drehmoment belastet wird und folglich mehr Strom in den Motor fließt. Bei dem Störsignal handelt es sich, wie am Verlauf zu erkennen ist, um das
PWM-Signal, welches für die Drehzahlregelung für den Motor benötigt wird.
Für die Störungen lässt sich ein theoretisches Modell, ein sogenanntes Störkopplungsmodell (siehe Abbildung 6.2) erstellen. Hierbei wird von Störquelle, Kopplungspfad
und Störsenke gesprochen. Die Störquelle ist hierbei der Ursprung der Störung. Die
Störsenke ist das beeinflusste Gerät oder der beeinflusste Schaltungsbereich. Der Weg
zwischen Quelle und Senke nennt man den Kopplungspfad. [38]
In dieser Störung ist die Senke das Hall-Sensorsignal und die Störquelle das PWMSignal der Leistungselektronik. Bei dem Kopplungspfad liegt eine Impedanzkopplung
nahe. Eine Impedanzkopplung kann bei gemeinsam benutzten Leitungsabschnitten,
wie es z.B. bei der Masseleitung üblich ist, auftreten. Fließen über diesen Leitungsabschnitt Ausgleichsströme, so kann es dazu führen dass Spannungen eingekoppelt
werden. Ursache für diese Art von Störsignal sind nicht ausreichend dimensionierte
Massebahnen und Stützkondensatoren. [38]
Als behebende Maßnahme wurden die Masseleitungen mit zusätzlichen Drähten verstärkt. Zusätzlich wurden weitere Stützkondensatoren direkt hinter den MOSFETs eingelötet.
Chris Bauer
51
6.1. EMV Probleme durch das Schaltungslayout
Abbildung 6.1.: Störungen auf Hall-Sensorsignal
Abbildung 6.2.: Kopplungsarten für Signalstörungen [38]
Chris Bauer
52
6.2. EMV Schutz in der Bohrlochsonde
Durch diese Maßnahmen konnten die Störungen vermindert, jedoch nicht gänzlich verhindert, werden. Ein weiterer Kopplungspfad könnte die kapazitive Kopplung sein.
Diese Art von Störung tritt durch Übersprechen benachbarter Leiter auf. [38] Die HallSensorsignale sind in einem Flachbandkabel zusammen mit den Leitern für die Motorspulen verlegt. Der Motor wurde von Maxon Motor in dieser Ausführung vorkonfektioniert geliefert. Ein Trennen von Signal- und Motorleitungen sowie zusätzliches
Verdrillen der Adern wäre hier eine bessere Methode. Beim Maxon EC 22 HD Hochtemperatur Motor wurde diese Methode gewählt.
Es könnten außerdem kapazitive Kopplungen auf der Platine zwischen einzelnen Leitungen die Störsignale verursachen. Diese Art der Kopplung kann nur durch ein neues
Platinenlayout verhindert werden.
Ein weiterer Ansatzpunkt, welcher die EMV-Problematik entschärfen könnte, wären
andere Vorwiderstände zwischen Treiber IC und MOSFET um die Signal Anstiegs- und
Fallzeiten zu vergrößern. Aufgrund der kurzen Bearbeitungszeit konnten jedoch nicht
mehr alle Möglichkeiten zur Fehlerbehebung umgesetzt werden, weshalb an diesem
Punkt der Arbeit noch Entwicklungsbedarf besteht.
6.2. EMV Schutz in der Bohrlochsonde
Bei der Ansteuerung eines Elektromotors über eine getaktete Endstufe können Störsignale nie gänzlich vermieden werden. Aus diesem Grund müssen in der Bohrlochsonde weitere Maßnahmen getroffen werden. Beispielsweise sollten Datenleitungen nicht
parallel mit den leistungsführenden Motorleitungen verlegt werden. Die Datenleitungen sollten gegen Störeinflüsse abgeschirmt und verdrillt sein.
Auch der Hochtemperatur BLDC Servoregler selbst sollte mit einer Schirmung, welche
evtl. mit dem Kühlkörper der Leistungselektronik realisiert werden könnte, ausgestattet werden. Hierdurch kann die Abstrahlung elektromagnetischer Wellen schon am Ursprungsort gedämpft werden.
Um Störungen über die Versorgungsspannungsleitungen zu verhindern, sollte die Spannungsversorgung der Bohrlochsonde entsprechend gepuffert werden.
Weiter zu beachten ist, dass die PWM-Frequenz im Frequenzspektrum von Ultraschallmessungen liegt. Dies bedeutet für Messungen im Bohrloch, dass diese nur dann funktionieren, wenn die Motoren nicht in unmittelbarer Nähe Verwendung finden. Ist dies
der Fall, müssen Messungen und der Betrieb der Motoren aufeinander abgestimmt
werden.
Chris Bauer
53
7. Softwareentwicklung
Für die Programmierung des TI SM470R1B1M-HT Mikrocontrollers wird die Entwicklungsumgebung IAR Embedded Workbench verwendet. Programmiert wird der Controller über die JTAG-Schnittstelle1 mit einem J-Link Emulator von Segger. Der J-Link
Emulator von Segger hat einen USB-Anschluss, womit er mit dem PC verbunden wird.
Passende Treiber und Diagnosesoftware für die an der JTAG Schnittstelle angeschlossenen Geräte sind ebenfalls von Segger erhältlich. Mit dem J-Link Commander von Segger kann das angeschlossene Gerät über eine Konsole ausgelesen, neu gestartet und
getestet werden.
Die Entwicklungsumgebung von IAR greift auf die Treiber von Segger zurück und beschreibt den Flash-Speicher des Mikrocontrollers automatisch mit den Einstellungen
des TI TMS470R1B1M Mikrocontrollers. Hierfür wurde ein Beispielprojekt von IAR für
den TMS470R1B1M Mikrocontroller verwendet und abgeändert. Es handelt sich bei
diesem Mikrocontroller um das Standartelektronikderivat von TI, welches nicht mehr
erhältlich ist.
In diesem Kapitel wird zunächst die Inbetriebnahme einzelner Module für den Betrieb
des Hochtemperatur-Servoreglers beschrieben. Abschließend wird die Interrupt Programmstruktur des Servoreglers erläutert.
7.1. Inbetriebnahme einzelner Module
7.1.1. Realisierung der Kommutierung
Bei der Kommutierung handelt es sich in der Leistungselektronik um den Vorgang in
dem der Stromfluss, von einem Zweig auf einen anderen, umgeschaltet wird. Dieser
Vorgang kann mechanisch oder elektronisch mit einer Logik erfolgen. Bei einem BLDC
Motor wird die Kommutierung elektronisch realisiert [41].
Die Motorspulen müssen entsprechend der aktuellen Position des Rotors mit Strom beaufschlagt werden, um ein Drehmoment in die gewünschte Drehrichtung zu erzeugen.
1 Joint
Test Action Group: Wird zum Beschreiben des Flash-Speichers verwendet.
Chris Bauer
54
7.1. Inbetriebnahme einzelner Module
Die Rückmeldung der Position des Rotors wird hierbei über drei Hall-Sensoren, welche im Motor integriert sind, geliefert. Daraus resultiert eine Auflösung in 60° Schritten.
Die Bestromung erfolgt nach einem Kommutierungsschema (siehe Tabelle 7.1).
Hall-Sensoren
1
2
3
1
0
1
1
0
0
1
1
0
0
1
0
0
1
1
0
0
1
1
0
1
1
0
0
1
1
0
0
1
0
0
1
1
0
0
1
Drehrichtung
Vorwärts
Vorwärts
Vorwärts
Vorwärts
Vorwärts
Vorwärts
Rückwärts
Rückwärts
Rückwärts
Rückwärts
Rückwärts
Rückwärts
Transistoren High-Seite
AH
BH
CH
1
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
1
0
1
0
0
0
1
0
0
1
1
0
0
1
0
0
0
1
0
Transistoren Low-Seite
AL
BL
CL
0
1
0
0
0
1
0
0
1
1
0
0
1
0
0
0
1
0
1
0
0
1
0
0
0
1
0
0
1
0
0
0
1
0
0
1
Tabelle 7.1.: Kommutierungslogik BLDC Motor [32]
Es sind also immer zwei Halbbrücken beim Stromfluss beteiligt. In einer beteiligten
Halbbrücke wird der Low-Side MOSFET dauerhaft durchgeschaltet, während auf der
zweiten beteiligten Halbbrücke das PWM-Signal für die Drehzahlregelung anliegt. Der
grundlegende Stromfluss kann der Abbildung 2.3 entnommen werden.
Die Kommutierung des Motors ist ein zeitkritischer Vorgang. Dies bedeutet, genau
dann, wenn der Stromfluss nach den Sensorwerten geändert werden soll, muss kommutiert werden.
Um dies mit einem Mikrocontroller zu realisieren, wird die Kommutierung Interrupt
gesteuert umgesetzt. Die drei Hall-Sensorsignale werden über den GIO (General-Purpose Input/Output) Port A des Mikrocontrollers ausgelesen. Um die Erkennung eines
neuen Sensorwerts zu realisieren, werden die Flanken der Sensorsignale überwacht.
In Tabelle 7.1 sind in der Spalte Hall-Sensoren die Werte, welche nacheinander in einer Umdrehung auftreten, aufgelistet. Hierbei ist zu erkennen, dass es sich um einen
3-Bit-Gray-Code handelt, folglich ändert sich immer nur eine Stelle der Binärzahl. Zusätzlich ist zu erkennen, dass die Änderungen einer Binärstelle immer abwechselnd,
einmal von 0 auf 1 und einmal von 1 auf 0 auftreten. Hierdurch ist eine gute Fehlerresistenz gegeben.
Chris Bauer
55
7.1. Inbetriebnahme einzelner Module
Der Gray-Code lässt sich mit Hilfe von Hyperwürfeln darstellen. Die Ecken eines Würfels entsprechen hierbei jeweils einer Zahl im Gray-Code und die Kanten stellen die
Übergänge zwischen diesen dar. Bei einem 3-Bit-Gray-Code lässt sich ein Würfel mit
8 Ecken erstellen. Es ergeben sich somit 6 verschiedene Reihenfolgen der Binärzahlen,
um einen 3-Bit-Gray-Code zu erzeugen. [40]
Bei den Hall-Sensorwerten werden 3-Bit Zahlen verwendet, jedoch nur 6 Zustände benötigt. Der Hyperwürfel sieht wie in Abbildung 7.1 zu sehen ist aus.
Abbildung 7.1.: Hyperwürfel Gray-Code Hall-Sensorwerte
Mit den schwarzen Pfeilen ist der Kreislauf der Hall-Sensorwerte, in positiver Drehrichtung, dargestellt. Die Binärzahlen 000 und 111 kommen nicht in den Hall-Sensorsignalen
vor, da diese Zustände einem Fehler entsprechen könnten.
Bevor es zu einer automatischen Kommutierung - durch Interrupts - kommen kann,
wird beim Anlaufen des Motors eine Startinitialisierung, abhängig von der gewünschten Drehrichtung, für den Motorlauf durchgeführt (siehe Abbildung 7.2).
Chris Bauer
56
7.1. Inbetriebnahme einzelner Module
Abbildung 7.2.: Programmablaufplan der Startinitialisierung
Chris Bauer
57
7.1. Inbetriebnahme einzelner Module
Um das Umschalten der Sensorwerte von einem auf den nächsten Wert zu erkennen,
werden die unteren drei Bits des GIO Port A als Interrupt-Eingänge initialisiert. Zusätzlich wird der High End Timer (HET) für die PWM-Erzeugung initialisiert und gestartet
(näheres hierzu in Unterabschnitt 7.1.2).
In der Startinitialisierung werden die Hall-Sensorwerte auf ihre Richtigkeit überprüft.
Da die Rotorposition noch unbekannt ist, können lediglich die nicht auftretenden Zustände detektiert werden. Dies wäre beispielsweise der Fall, wenn die Hall-Sensoren
nicht oder nicht richtig angeschlossen sind.
Tritt ein Fehlerfall auf, wird die Stoppinitialisierung aufgerufen. In dieser werden die
Ausgänge der Halbbrückentreiber über den GIO Port A so angesteuert, dass die Motorwicklungen kurzgeschlossen sind. Zusätzlich wird der HET gestoppt, die Interrupts
des GIO Port A und des HET gesperrt, sowie eine Fehlermeldung über die serielle
Schnittstelle 1 ausgegeben.
Beginnt sich der Motor zu drehen, wird die Kommutierung mit der Interrupt Service
Routine des GIO Port A realisiert. In Abbildung 7.3 ist der Programm-Ablaufplan (PAP)
dieser Interrupt Service Routine zu sehen.
Als erstes wird nach den Betriebsmodi entsprechend ein Array für die Kommutierung
sowie für den Vergleich der Sensorwerte ausgewählt. Im Programm sind folgende Werte in Arrays hinterlegt:
• Werte für den GIO Port A zum Ansteuern der Halbbrücken
• Die erwarteten Sensorwerte nach der aktuellen Position
• Werte für die PWM Erzeugung mittels HET
• Art der Flankentriggerung je nach Position
Chris Bauer
58
7.1. Inbetriebnahme einzelner Module
Abbildung 7.3.: Programmablaufplan Interrupt Service Routine der Kommutierung
Chris Bauer
59
7.1. Inbetriebnahme einzelner Module
Die Flankentriggerung muss jedoch nur in der Startinitialisierung mit dem Array „Kommu_r“ oder „Kommu_l“ - je nach Drehrichtung - eingestellt werden. Danach kann immer zwischen positiver und negativer Flanke getoggelt werden. Dies ist notwendig, da
der Mikrocontroller nur die positive oder die negative Flanke erkennen kann. [11]
Als Beispiel werden die Arrays für den Rechtslauf hier aufgezeigt:
1
i n t senswert_erw_r [ 8 ] = { 0 , 0 x03 , 0 x06 , 0 x02 , 0 x05 , 0 x01 , 0 x04 , 0 } ;
2
i n t Kommu_r [ 8 ] = { 0 , 4 0 , 2 4 , 4 8 , 4 8 , 2 4 , 4 0 , 0 } ;
3
i n t F l a n k e _ r [ 8 ] = { 0 x00 , 0 x07 , 0 x07 , 0 x00 , 0 x07 , 0 x00 , 0 x00 , 0 x00 } ;
4
i n t pwm_r [ 8 ] = { 0 , 1 , 2 , 2 , 3 , 1 , 3 , 0 } ;
Das Springen an die gewünschte Position in den Arrays wird mit dem 3-Bit-Wert der
Hall-Sensoren realisiert. Da die Werte der Hall-Sensoren nicht einer binären schrittweisen Erhöhung entsprechen, sieht die Anordnung der Werte zusammengewürfelt aus.
Mit dieser Umsetzung wird das Programm aber sehr schnell abgearbeitet, da lediglich die Sensorwerte als Adresswerte in die Arrays eingesetzt werden müssen. Je nach
Drehrichtung und der Unterscheidung, ob gebremst werden soll, wird das passende
Array ausgewählt.
Der Vergleich, ob der Sensorwert dem erwarteten entspricht, geht dann sehr einfach:
1
inpneu=GIODINA & 0 x07 ;
2
i f ( senswert_erw_r [ inp ]== inpneu )
Es muss lediglich der alte Wert der Hall-Sensoren als Adresse für das Array verwendet
werden.
Nachdem der Abgleich durchgeführt wurde, kann kommutiert werden. Hierbei wird
der entsprechende Wert aus dem Array „Kommu_r “ (bei Drehrichtung rechts) auf den
GIO Port A geschrieben und die PWM-Signale aktualisiert, sowie der Interrupt des
PWM-Signals freigegeben (näheres hierzu in Unterabschnitt 7.1.2). Danach wird die
aktuelle Motorposition für den nächsten Vergleich in der Variable „inp“ gespeichert.
Anschließend folgt die Umstellung der Flankentriggerung und das Zurücksetzen des
GIO Port A Interrupts, damit der Interrupt wieder funktioniert.
Tritt ein Fehler in den Hall-Sensorwerten auf, wird die Stoppinitialisierungs aufgerufen
und der Motor hält an.
Diese Fehlererkennung muss für den Fall, dass etwas mit dem Motor positioniert werden soll, deaktiviert bzw. abgeändert werden. Bei der Positionierung ist je nach Regelung eine Richtungsumkehr von Rechts- auf Linkslauf notwendig. Die Erkennung eines
nicht erwarteten Hall-Sensorwertes könnte hier die Erkennung der Richtungsumkehr,
Chris Bauer
60
7.1. Inbetriebnahme einzelner Module
womit eine andere Kommutierung notwendig wird, darstellen.
Bereits umgesetzte Betriebsmodi
• Rechts- und Linkslauf
• Aktives Bremsen Rechts- und Linkslauf
Beim normalen Rechts- und Linkslauf werden die Motorspulen entsprechend der Tabelle 7.1 mit Strom versorgt.
Beim aktiven Bremsen werden die Motorspulen im Rechtslauf mit dem Strom für die
aktuelle Position des Linkslaufs beaufschlagt. Hierdurch wird ein dem Strom proportionales Gegenmoment erzeugt. Dieses Moment kann mit dem Tastverhältnis des PWMSignals geregelt werden. Die erwarteten Positionswerte entsprechen hierbei der aktuellen Drehrichtung. Die Stromaufnahme beim aktiven Bremsen verhält sich ähnlich wie
im Anlaufmoment, sodass der Strom über das Tastverhältnis stärker reduziert werden
muss. Als passives Bremsen wird das Kurzschließen der Motorspulen, wie es in der
Stoppinitialisierung realisiert wird, bezeichnet.
7.1.2. PWM Erzeugung
Ein PWM-Signal ist zur Drehzahlregelung des BLDC Motors notwendig. Für die Erzeugung wird der High End Timer (HET) des SM470R1B1M-HT Mikrocontrollers verwendet. Es sind drei verschiedene PWM-Signale, für jeden Halbbrückentreiber ein Signal, notwendig. Es ist immer nur ein PWM-Signal an einer Halbbrücke aktiv. Dies
wird derzeit realisiert, indem auf einem der drei Ausgänge das richtige Tastverhältnis
ausgegeben wird und die anderen beiden Ausgänge ein Tastverhältnis von Null, also
dauerhaft logisch Null, ausgeben.
Für die Programmierung des HET wird von TI eine Assembler ähnliche Programmiersprache verwendet. Hierfür müssen an der Entwicklungsumgebung von IAR Einstellungen geändert werden. Aus einem File mit der Bezeichnung *.het wird dann beim
kompilieren ein C-File sowie ein Header-File erstellt, welche dann dem Projekt hinzugefügt werden. In das Programm des Servoreglers wird zusätzlich die Funktion „MemCopy32“ hinzugefügt, mit welcher der Programmcode in den RAM-Speicher des HET
kopiert wird. [10]
Chris Bauer
61
7.1. Inbetriebnahme einzelner Module
Prinzipelle Funktionsweise PWM
Um ein PWM-Signal zu generieren werden ein Zähler und ein „Vergleicher“ benötigt.
Mit dem Zähler wird die Periodendauer bzw. die Frequenz des Signals in Abhängigkeit
des Eingangstaktsignals eingestellt. Mit dem Vergleicher kann dann der Tastgrad des
Signals verändert werden. Der Vergleicher ändert den Zustand des Ausgangspins von
Low auf High oder umgekehrt genau dann, wenn der Zähler den gespeicherten Zahlenwert erreicht hat. In der Abbildung 7.4 ist ein Modell zur Erzeugung eines PWMSignals zu sehen. Der Tastgrad beträgt in diesem Modell ca. 80% oder 0,8. Das Signal
ist also 80% der Periodendauer auf High-Pegel.
Abbildung 7.4.: Generieren eines PWM-Signals
Beim Generieren des PWM-Signals ist zu beachten, dass der Vergleichswert nur innerhalb des Zählerwertes liegen kann. Ist dieser größer als der Zählerwert kann kein
PWM-Signal generiert werden.
Der Programmcode um das PWM-Signal zu erzeugen wird im SM470R1B1M-HT Mi-
Chris Bauer
62
7.1. Inbetriebnahme einzelner Module
krocontroller von dem HET Coprozessor abgearbeitet.
PWM generieren mit dem High End Timer
Der HET hat einen Takteingang, der mit dem Systemtakt des Mikrocontrollers übereinstimmt. Danach kommen zwei Teiler mit welchen der Systemtakt reduziert werden kann (siehe Abbildung 7.5). Mit dem resultierenden Taktsignal wird, wie in Abbildung 7.4 dargestellt, die Frequenz und das Tastverhältnis eingestellt.
Abbildung 7.5.: Prescaler Configuration HET [8]
Die Frequenz des PWM-Signals lässt sich mit folgender Formel errechnen:
f PW M =
SYSCLK
HR prescale · LR prescale · Zähler
(7.1)
Es ist aus der Formel ersichtlich, dass der Zählerwert für die gleiche PWM-Frequenz
höher sein muss, wenn der Teiler am Takteingang geringer wird. Hieraus resultiert eine größere Auflösung für den Vergleichswert innerhalb einer PWM-Periode.
Begrenzender Faktor beim Reduzieren des Teilers ist die „Loop Resolution“. Wird die
Programmschleife, in der das Programm abgearbeitet werden, kann zu kurz, werden
die Pins nicht mehr korrekt vom HET-Programm angesteuert und es kann somit kein
PWM-Signal generiert werden.
Die größte mögliche Auflösung wird mit einem Teiler von 13 erreicht. Hierbei wird in
das HRPrescale Register ein Wert von 13 und in das LRPrescale Register ein Wert von 1
eingetragen. Mit geringeren Werten für den Teiler kann das Programm nicht mehr abgearbeitet werden.
Die PWM-Frequenz wurde minimal von gewünschten 50kHz reduziert um eine etwas
größere Auflösung zu erreichen. Der Zähler hat einen Wert von 66 womit sich die Frequenz mit einem Systemtakt von 40MHz wie folgt ergibt:
f PW M =
Chris Bauer
40MHz
= 46620Hz
13 · 1 · 66
63
7.1. Inbetriebnahme einzelner Module
Als maximales Tastverhältnis der PWM wird aufgrund der Bootstrapschaltung ca. 0,9
verwendet. Hierdurch ergibt sich eine Auflösung des Tastverhältnis in ca. 60 Schritten.
Das Tastverhältnis der PWM-Signale wird beim Überlaufen des Zählerwertes durch
einen Interrupt, vom HET-Coprozessor an die CPU des Mikrocontrollers, neu angefordert. Dies würde bedeuten, dass die Interrupts vom HET mit einer Frequenz von 46,6
kHz auftreten würden. Aus diesem Grund sind die Interrupts des HET deaktiviert,
bis eine Änderung am Tastverhältnisses vorliegt. Änderungen können vom Regelkreis
oder der Kommutierung vorgenommen werden. Bei der Kommutierung wird immer
nur eines der drei PWM-Signale mit dem richtigen Tastverhältnis beaufschlagt, die anderen beiden Signale werden über das Tastverhältnis auf dauerhaft Null gelegt. Dies
ist deshalb notwendig, da immer nur eine Halbbrücke mit dem PWM-Signal versorgt
wird. Um die PWM-Signale anzupassen, werden die Variablen des jeweiligen Tastverhältnisses über die Funktion „MemCopy32“ beschrieben. Danach können die Interrupts des HET wieder deaktiviert werden, was am Ende der Interrupt Service Routine
des HET realisiert wird (näheres zu den Interrupts im Abschnitt 7.3).
7.1.3. Strommessung mittels AD-Wandler
Die Strommessung des Servoreglers wird mit dem im Mikrocontroller integrierten ADWandler realisiert. Der AD-Wandler wird hierfür in der Startinitialisierung des Programms konfiguriert.
Der AD-Wandler wird im „Continuous conversion mode“konfiguriert. Dies bedeutet,
die anliegenden Spannungswerte werden dauerhaft in die entsprechenden Digitalwerte gewandelt.
Der AD-Wandler könnte auch im „Single conversion mode“ betrieben werden, jedoch
müsste der AD-Wandler mit dieser Einstellung für jedem Digitalisierungsvorgang aufgerufen werden. [12]
Der AD-Wandler Kanal 9, an dem der Current-Shunt Monitor angeschlossen ist, wird
der Convert Group 1 hinzugefügt und der Interrupt für diese Gruppe aktiviert. Im Betrieb wird dann, nachdem alle Digitalisierungen der Convert Group 1 abgeschlossen
sind, das entsprechende Interruptflag gesetzt. In der dazugehörigen Interrupt Routine
werden die Werte des AD-Wandlers anschließend auf eine Variable addiert und gemittelt. Derzeit ist eine Samplerate von 18.000
Samples
Sec
eingestellt. Gemittelt werden 1000
Werte, sodass derzeit alle 50ms ein neuer Wert des Stroms vom Regelkreis ausgelesen werden kann. Diese Zeit kann, indem weniger Samples gemittelt werden oder die
Samplerate erhöht wird, noch verringert werden.
Chris Bauer
64
7.1. Inbetriebnahme einzelner Module
7.1.4. Drehzahlmessung
Für die Drehzahlmessung wird das Real-Time-Interrupt-Modul (RTI-Modul) des Mikrocontrollers eingesetzt. Es handelt sich hierbei um einen Zähler, welcher unabhängig
von der CPU und der Software, welche gerade bearbeitet wird, läuft. Dieser Timer ist
speziell für Code-Benchmarking ausgelegt und somit für die genaue Messung von Zeiten, wie es bei der Drehzahlmessung notwendig ist, geeignet.
Das RTI-Modul ist am Eingang wie in Abbildung 7.6 zu sehen aufgebaut.
Abbildung 7.6.: Takteingang RTI-Modul [9]
Der RTI-Takt kann entweder direkt vom Takteingang des Mikrocontrollers ohne PLL
oder mit PLL gewählt werden. Ohne PLL beträgt der RTI-Takt (RTICLK) 10MHz. Mit
PLL sind 40MHz als Takteingangssignal wählbar. Für die Messung der Drehzahl reichen 10MHz als Taktsignal aus.
Die maximale Kommutierungsfrequenz beträgt lediglich:
f Kommu
U
U
13900
min · 6 = 1390Hz
= min · 6 =
60
60
Es wird pro Umdrehung 6 mal kommutiert, weshalb die Kommutierungsfrequenz 6
mal höher liegt als die Umdrehungsfrequenz.
Somit erhält man mit Maximaldrehzahl und einem Teiler von 10:
10MHz
= 719 Zählschritte
1390Hz · 10
Der Teiler wird über das Register RTIPCTL in den unteren 10 Bit gewählt.
Chris Bauer
65
7.2. Regelkreis
Es wird ein Zahlenwert von 9 eingetragen, um einen Teiler von 10 zu realisieren. Das
Register wird bitweise dekrementiert und läuft nach 0 wieder mit dem Reloadwert von
9 an, womit sich eine Zählfrequenz von 1MHz ergibt.
Die Auflösung beträgt
1
1MHz
= 1µs was für die Drehzahlmessung genau genug ist.
Für die Messung wird zum Beginn jedes Kommutierungsinterrupts zuerst einmal der
Zählerwert des RTICNTR Registers ausgelesen und gespeichert. Nachdem die Motorspulen neu kommutiert sind, wird dann der Drehzahlwert ausgerechnet.
Beim Berechnen der Differenz zwischen altem und neuem Timerwert muss der Timerüberlauf mit beachtet werden. Dies wird mit folgendem Programmteil realisiert:
1
2
if ( ctr < c t r _ a l t )
{
z a e h l w e r t= c t r + 0 x200000 − c t r _ a l t ;
3
4
}
5
else
6
{
zaehlwert =
7
8
ctr − ctr_alt ;
}
Der Counter wird im Falle eines Überlaufs um den maximalen Counterwert erhöht.
Bei ersten Tests mit der Drehzahlmessung des Motors sind Probleme mit schwankenden Drehzahlwerten aufgetreten. Diese lagen im Bereich von 1000
U
min ,
ohne dass sich
die Motordrehzahl veränderte.
Um die Drehzahlmessung zu stabilisieren, wird diese durch Mitteln von 6 Kommutierungszeiten, was einer Umdrehung entspricht, ausgerechnet. Durch das Mitteln der
Timerwerte bleiben die Drehzahlwerte stabil.
Hierdurch wird bestätigt, dass die Timerwerte pro Kommutierungsschritt unterschiedlich sind. Der Grund für die unterschiedlichen Timerwerte könnte an unterschiedlich
positionierten Hall-Sensoren liegen. Um die Ursache der unterschiedlichen Werte zu
erörtern, wird die Drehzahlmessung des RTI-Moduls verifiziert (siehe Abschnitt 8.1).
7.2. Regelkreis
Für die Regelung wird aus Zeitgründen zunächst nur ein P-Regler für die Drehzahlregelung implementiert. In diesem Unterkapitel wird auf die Details der Implementierung des Regelkreises eingegangen.
Chris Bauer
66
7.2. Regelkreis
7.2.1. Aufruf Regelkreis
Der Drehzahlregelkreis des Motors wird zyklisch in konstanten Zeitabständen aktiviert
um eine neue Stellgröße auszurechnen. Die Drehzahlregelung wird digital auf dem Mikrocontroller realisiert. Hierbei soll die Drehzahlregelung ebenfalls Interrupt gesteuert
ablaufen. Die Abtastzeitpunkte, in denen die aktuelle Drehzahl ausgelesen und eine
neue Stellgröße errechnet wird, werden hierbei von einem Timer per Interrupt automatisch vorgegeben.
Um dies zu realisieren wird der TAP-Interrupt des RTI-Moduls verwendet. Dieser Interrupt tritt immer dann auf, wenn das für den TAP-Interrupt gewählte Bit des RTIZählers Null gesetzt wird.[9]
In Tabelle 7.2 sind die wählbaren TAP-Bits ersichtlich. Die TAP-Interrupt-Periode lässt
sich mit der Gleichung 7.2 berechnen:
Tabelle 7.2.: TAP-Interrupt-Bits [9]
T = ( M + 1) · ( TapValue) · ( RTICLKPeriod)
[9]
(7.2)
T ...TAP Periode
M ...Preload Value des Timers
TapValue ...Ausgewählter TAP-Wert
RTICLKPeriod ...Ausgewählte Taktfrequenz des RTI-Moduls
Chris Bauer
67
7.2. Regelkreis
Mit der TAP-Interrupt-Periode ist die Zeit bezeichnet, in der zyklisch die Interrupts
auftreten. Als TAP-Wert wurde im ersten Ansatz 32768 gewählt. Mit diesem Wert lässt
sich die TAP-Periode errechnen:
T = (9 + 1) · 32768 ·
1
= 32, 7ms
10MHz
Um die Regelzykluszeit besser einschätzen zu können, wird sie mit den Zeiten für eine
Umdrehung bei Minimal- und Maximaldrehzahl verglichen.
U
Die maximale Nenndrehzahl des Maxon EC 22 HD Motors beträgt 10700 min
. Für eine
Umdrehung wird eine Zeit von 5,6ms benötigt. Folglich hat der Motor innerhalb eines
Abtastzyklus des Regelkreises ca. 6 Umdrehungen mit maximaler Drehzahl zurückgeU
legt. Mit der minimalen Drehzahl von 1000 min
legt der Motor innerhalb von 32,7ms nur
ca. eine halbe Umdrehung zurück.
Der nächst kleinere TAP-Wert ergibt mit den derzeit eingestellten Parametern für das
RTI-Modul eine Zykluszeit von ca. 4ms. Der nächst größere TAP-Wert ergibt eine Zykluszeit von 262ms was für den Regelkreis eine zu lange Zeitdauer ist.
Es müssen zunächst Messungen mit der derzeit eingestellten TAP-Zykluszeit von 32,7ms
durchgeführt werden, um eine genau Aussage über die Eignung treffen zu können.
Wenn die Abtastzeit des Regelkreises den Anforderungen nicht gerecht wird, können noch grundlegende Änderungen am RTI-Taktsignal vorgenommen werden. Beispielsweise kann hierdurch eine Zeit zwischen 32,7ms und 4ms für die TAP-InterruptPeriode realisiert werden. Allerdings muss darauf geachtet werden, dass Änderungen
der Parameter sich auf die Berechnung des Drehzahlwerts auswirken und hierdurch
weiterführende Anpassungen am Programm notwendig werden.
7.2.2. Drehzahlregelung
Für die Regelung soll im fertigen Servoregler eine Kaskadenregelung eingesetzt werden. Gerade bei Positionsregelungen, wie sie beispielsweise in der Partnerarbeit [1] bei
der Positionierung des Kameraobjektivs beschrieben wird, ist das Kaskadieren der Regelaufgaben von Vorteil.
In der Abbildung 7.7 wird eine solche Kaskadenregelung dargestellt. Beim roten Bereich handelt es sich um den inneren Regelkreis, beim Servoregler um einen Stromregelkreis. Der grüne Regelkreis stellt den mittleren Regelkreis, den Drehzahlregelkreis
dar, und der äußere blaue Bereich ist für die Lagenregelung zuständig.
Chris Bauer
68
7.2. Regelkreis
Abbildung 7.7.: Beispiel Kaskadenregelung [35]
Hierbei müssen die inneren Regelkreise schneller sein als die äußeren, damit die Kaskadenregelung funktionieren kann. [35]
Es könnten beispielsweise die beiden Compare-Register des RTI-Moduls für die zusätzlich notwendigen Zyklischen Interrupts verwendet werden. Dabei muss beachtet
werden, dass das Compare-Register nur einmal in pro Timerperiode (ähnlich PWM,
siehe Abbildung 7.4) einen Interrupt auslöst. Folglich müsste pro Compare-Interrupt
der Compare-Wert entsprechend erhöht werden, um eine schnellere Interruptperiode
zu erreichen. Eine zweite Möglichkeit wäre, die äußeren Regelkreise vom inneren Regelkreis zu aktivieren.
Derzeit besteht der Regelkreis nur aus einer Drehzahlregelung. Diese wird im ersten
Schritt allerdings nur als Proportional-Regler (P-Regler) ausgeführt. Im Folgenden wird
auf die Implementierung dieses Reglers eingegangen.
P-Regler
Im ersten Ansatz wird aus Zeitgründen nur ein P-Regler für die Drehzahlregelung umgesetzt. Die Regelverstärkung KP des P-Reglers wurde zudem nicht errechnet, sondern
lediglich durch praktisches Testen ausgelegt. Um einen PID-Regler, wie er für die Drehzahlregelung gewünscht ist, zu implementieren, müssen zunächst Modelle des Reglers
mit der Regelstrecke aufgestellt und anhand dieser die Regelparameter festgelegt werden.
Aus Zeitgründen wurde auf ein solches Modell verzichtet und lediglich ein P-Regler
implementiert. Dieser Regler ist durch weitere Regelanteile (integral und differential)
zu späteren Zeitpunkten zu ergänzen.
Zusätzlich zu den Regelanteilen sollte eine Notabschaltung im Regelkreis integriert
werden, welche eine Strombegrenzung und einen Blockierschutz beinhaltet.
Chris Bauer
69
7.2. Regelkreis
Das Programm des P-Reglers ist wie im PAP in Abbildung 7.8 dargestellt aufgebaut.
Die Drehzahl wird über das Tastverhältnis des PWM-Signals variiert, wobei obere Grenzen für die Werte festgelegt wurden. Beim normalen Betriebsmodus liegt die obere
Grenze bei einem Tastverhältnis von 0,9. Beim aktiven Bremsmodus wird ein maximales Tastverhältnis von 0,15 festgelegt. Der Betriebsmodus des aktiven Bremsens wird in
Unterabschnitt 7.1.1 erklärt.
Die Problematik beim aktiven Bremsen liegt darin, dass der Stromfluss durch die Spulen so groß ist wie im Anlaufmoment, da keine Gegeninduktion in der Spule durch
das Polrad auftritt. Das Polrad bewegt sich beim aktiven Bremsen von der aktuell mit
Strom versorgen Motorspule weg.
Je nach Last, welche am Motor angeschlossen wird, kann auf den aktiven Bremszustand verzichtet und nur über das Verringern des Tastverhältnisses schon ausreichend
abgebremst werden.
Für die ersten Tests im Prüfstand (siehe Kapitel 8) wird das aktive Bremsen verwendet,
da der Prüfstand eine sehr große Schwungmasse mit entsprechender Trägheit aufweist.
Ein Bremsen nur durch Verringern des Tastverhältnisses würde mit dieser Art von Last
nicht ausreichen.
Chris Bauer
70
7.2. Regelkreis
Abbildung 7.8.: Programmablaufplan P-Regler
Chris Bauer
71
7.3. Interruptstrukur
7.3. Interruptstrukur
Das komplette Programm des Servoreglers läuft ausschließlich Interrupt gesteuert ab.
Im Hauptprogramm wird lediglich beim Start des Programms die Initialisierung der
PLL, des AD-Wandlers, der Seriellen Schnittstelle und des RTI-Moduls durchgeführt.
Des weiteren werden die Interrupt-Prioritäten, auf welche nachfolgend eingegangen
wird, in der Initialisierung im Hauptprogramm festgelegt.
7.3.1. Interrupt-Prioritäten
Das Interrupt-Management des SM470R1B1M-HT Mikrocontrollers bietet die Möglichkeit den einzelnen Interruptquellen verschiedene Prioritäten zu vergeben. Die einzelnen Interruptquellen können grundlegend in zwei Interrupt-Vektoren, in „Fast Interrupt Request“ (FIQ) und in „Normal Interrupt Request“ (IRQ), unterteilt werden. Innerhalb des gesamten Central-Interrupt-Manager-Moduls (CIM-Moduls) des Mikrocontrollers gibt es 32 Interrupt Kanäle, welche mit einzelnen Peripheriemodulen verbunden sind. Dabei sind die Kanäle und somit auch die Prioritäten fest vorgegeben.
Kanal 0 hat hierbei die höchste und Kanal 31 die niedrigste Priorität. Die Prioritäten
können jedoch über die Software, von den Kanälen unabhängig, verändert werden. [9]
[13]
Die Interrupt-Prioritäten werden wie folgt von der CPU verarbeitet:
Treten gleichzeitig zwei IRQ-Interrupts auf wird der niedrigere Kanal zuerst abgearbeitet und anschließend der höhere Kanal. Wird ein IRQ-Interrupt abgearbeitet kann kein
zweiter, höher-priorer IRQ-Interrupt diesen unterbrechen. Lediglich ein FIQ-Interrupt
kann einen IRQ-Interrupt unterbrechen. Ein FIQ-Interrupt kann von keinem weiteren
FIQ-Interrupt unterbrochen werden, selbst wenn dieser eine höhere Priorität aufweist.
Es können also lediglich die FIQ-Interrupts die IRQ-Interrupts unterbrechen. Innerhalb
eines Interrupt-Vektors sind keine Unterbrechungen möglich.
Bei bestimmten Interruptquellen muss das Interrupt-Flag von der Software zurück gesetzt werden. Im derzeitigen Programm ist dies bei den GIO Port A Interrupts der Fall.
Hier muss das Register GIOOFFA ausgelesen werden, in welchem der auslösende Pin
abgespeichert wurde.
Im folgenden wird auf die Interruptstruktur im Programm des Servoreglers eingegangen.
Chris Bauer
72
7.3. Interruptstrukur
7.3.2. Gesamtaufbau des Servoregler-Programms
In der Abbildung 7.9 ist der Ablauf, des über Interrupt gesteuerten Programms, zu erkennen.
Abbildung 7.9.: Programmablauf durch Interrupts
Die rot markierten Felder geben die FIQ-Interrupts wieder, die grünen Felder die IRQInterrupts. Die beiden für die Kommutierung wichtigen Interrupts können somit die
zeitlich nicht so wichtigen Interrupts unterbrechen. Das Interrupt des HET hängt direkt
mit der Kommutierung zusammen. In dieser Interrupt-Routine wird das PWM-Signal
auf die aktive Halbbrücke durchgeschaltet.
Der Interrupt des AD-Wandlers hat die geringste Priorität. Derzeit wird in der ADConvert Gruppe 1 nur der Wert des Stroms digitalisiert. Zu einem späteren Zeitpunkt
muss hier noch der Spannungswert des PT-1000 Platintemperaturfühlers eingelesen
werden.
Chris Bauer
73
7.3. Interruptstrukur
Mit dieser Änderung besteht zwischen dem TAP-Interrupt und dem AD-Wandler-Interrupt noch eine zweite Abhängigkeit, welche in die Regelung mit einfließen muss. Die
Regelparameter, z.B. der Maximalstrom des Motors, werden dann mit der Temperatur
angepasst und müssen deshalb für den Regelkreis zur Verfügung stehen.
Hat der Regelkreis einen neuen Wert für das Tastverhältnis des PWM-Signals berechnet, so muss das Tastverhältnis schnellstmöglich aktualisiert werden, weshalb der Regelkreis den HET-Interrupt frei gibt.
Die Timerwerte für die Drehzahlmessung werden in der Interrupt-Routine des GIO
Port A gemessen und in einem Array abgelegt. In der Interrupt-Routine des Regelkreises wird dann der Mittelwert der Timerwerte und daraus die Motordrehzahl berechnet.
Im Hauptprogramm werden, wie oben beschrieben, Hardwaremodule initialisiert und
grundlegende für den Betrieb notwendige Parameter wie die PLL konfiguriert.
Danach befindet sich das Hauptprogramm in einer Endlosschleife und sendet die aktuellen Drehzahl- und Stromwerte ca. im Sekundentakt über die serielle Schnittstelle.
Diese können am PC in einer Konsole eingesehen werden. Im späteren Betrieb ist diese Funktion nicht mehr notwendig. Die externen Drehzahlvorgaben sollen per CANSchnittstelle an den Controller weitergegeben werden und die aktuellen Zustände des
Servoreglers sollen ebenfalls über diese Schnittstelle gesendet werden.
Chris Bauer
74
8. Motorprüfstand
Um den Servoregler besser testen zu können, wurde vor dieser Bachelorarbeit ein Prüfstand entwickelt (siehe Abbildung 8.1). In diesen kann entweder der EC 22 HD Motor
oder der EC 22 Motor von Maxon eingebaut werden. Hier links im Bild des Prüfstands
ist der Maxon EC 22 HD Motor zu erkennen.
Um die Drehzahlen zu messen oder ein Lastmoment stellen zu können, wird auf der
Gegenseite der Maxon EC 45 Motor mit EPOS verwendet. Dieser ist neben den HallSensoren zusätzlich mit einem Encoder ausgestattet. Der Encoder arbeitet mit einem
Inkrementalgeber mit 500 Impulsen pro Umdrehung und ist von der Auflösung somit
deutlich besser als die Hall-Sensoren mit 6 Werten pro Umdrehung.
Abbildung 8.1.: Motorprüfstand
Links im Bild ist das Hochtemperatur Embedded System mit der Leistungselektronik
auf einer externen Platine zu erkennen. Vorne rechts im schwarzen Gehäuse ist der
EPOS 70/10 von Maxon Motor zu sehen, mit welchem der EC 45 Motor (rechts im
Prüfstand) betrieben wird.
Chris Bauer
75
8.1. Verifizierung Drehzahlmessung
8.1. Verifizierung Drehzahlmessung
In diesem Kapitel werden die Messungen und Auswertungen der Drehzahlverifizierung beschrieben. Wie in Unterabschnitt 7.1.4 erwähnt, besteht ein Problem mit schwankenden Drehzahlwerten wenn nur ein Timerwert für die Drehzahlmessung verwendet
wird.
Um die Ursache der schwankenden Werte zu messen, wird die Interrupt-Routine der
Kommutierung bis auf die Zeitmessung reduziert. Dadurch kann sichergestellt werden, dass bei jeder Zeitmessung der Ablauf des Programms zu 100% gleich abläuft. In
der Interrupt-Routine wird dann lediglich der Counterwert eingelesen und die Differenz zum alten Counterwert ausgerechnet. Danach wird dieser Wert in einer Variable
gespeichert. Zuletzt werden die Werte zusammen mit dem aktuellen Hall-Sensorwert
über die serielle Schnittstelle gesendet.
Für die Verifizierung der Drehzahlmessung wurde der Maxon EC 45 Motor mit dem
EPOS 70/10 von Maxon angesteuert. Für die Regelung der Drehzahl wurde der am EC
45 Motor angeflanscht Encoder ausgewählt, da hiermit die Drehzahl auf eine UmdreU
hung genau geregelt werden kann. Für die Messung wurde eine Drehzahl von 500 min
eingestellt.
Ein Auszug aus den entstandenen Messergebnisse ist in Tabelle 8.1 zu sehen. Die Drehrichtung des Maxon EC 45 Motors war rechts herum orientiert, weshalb der Maxon EC
22 Motor links herum gedreht wurde. Die Drehrichtung ist an den Sensorwerten zu
erkennen (vgl. Tabelle 7.1).
Messung
1
2
3
4
5
6
7
8
9
10
11
12
Timerwert
18778
21398
17992
22434
17876
21465
18779
21392
17991
22435
17881
21455
Sensorwert
001
011
010
110
100
101
001
011
010
110
100
101
Tabelle 8.1.: Messdaten Drehzahlverifizierung
Chris Bauer
76
8.1. Verifizierung Drehzahlmessung
Werden die Drehzahlwerte immer in 6er Schritten gemittelt kommen sehr genaue Drehzahlwerte heraus (siehe Tabelle 8.2). Um die Drehzahlen zu errechnen, wird folgende
Formel verwendet:
Drehzahl =
1
· 60
6 Timerwerte addiert
1.000.000Hz
Gemittelte Messung
1 bis 6
2 bis 7
3 bis 8
4 bis 9
5 bis 10
6 bis 11
7 bis 12
(8.1)
Mittelwert 6 Werte
u
500,24 min
u
500,23 min
u
500,26 min
u
500,26 min
u
500,26 min
u
500,24 min
u
500,28 min
Tabelle 8.2.: Gemittelte Drehzahlwerte in 6er Schritten
Die sehr geringen Abweichungen im Kommabereich können vernachlässigt werden,
da sie für die Regelung nicht relevant sind. Ein Mitteln von 2er Paaren der Timerwerte
ergibt keine hohe Genauigkeit, wie es beim Mitteln der 6er Paare der Fall ist. Um die
Problematik zu verdeutlichen sind die Timerwerte über den Messungen in einem Diagramm dargestellt (siehe Abbildung 8.2).
Es ist kein direkter Zusammenhang zwischen den Timerwerten und den einzelnen
Hall-Sensoren im Diagramm zu erkennen. Wäre dies der Fall, so könnte beispielsweise
mit Paarungen der Messungen (1 und 4, 2 und 5 sowie 3 und 6) gemittelt eine Drehzahl
U
von 500 min
ohne größere Toleranzen errechnet werden.
Diese Toleranzen in den Timerwerten ließen sich über die Hysterese, Lagentoleranzen
der einzelnen Hall-Sensoren auf der Leiterplatte oder über die RC-Glieder, welche mit
Toleranzen behaftet sein können, erklären.
Es ergeben sich Toleranzen im Bereich von ca. 25
U
min
, wenn man die genannten Paa-
rungen zum Mitteln der Drehzahl verwendet. Zu diesem Zeitpunkt kann nicht sicher
festgestellt werden, weshalb die Drehzahlwerte schwanken. Aus diesem Grund muss
dieses Problem zu einem späteren Zeitpunkt noch einmal genauer untersucht werden.
Die Drehzahlmessung könnte hierfür ohne die RC-Glieder verifiziert werden.
Chris Bauer
77
8.2. Messungen P-Regler
Abbildung 8.2.: Diagramm zur Verifizierung der Drehzahlmessung
8.2. Messungen P-Regler
Um die Qualität des Servoreglers grob einschätzen zu können, wurden am Ende Messungen mit verschiedenen Drehzahlen und Verstärkungsfaktoren durchgeführt.
Es konnte ebenfalls der Prüfstand auf seine Eignung geprüft sowie die Einstellungen
für den EPOS Regler von Maxon getestet werden. Die Einstellungen für den EPOS Regler sind in der Studienarbeit von Herrn Jochen Antons aufgeführt [1].
In ersten Tests mit dem Servoregler wurde die Strombegrenzung auf 1,5A am Netzteil
eingestellt um im Falle einer Fehlfunktion die Zerstörung der Bauteile zu verhindern.
Danach wurde die Strombegrenzung variiert, da diese sich direkt auf die Regelung auswirkt. Zusätzlich zur Strombegrenzung am Netzteil wurde der Verstärkungsfaktor KP
zwischen den Messungen verändert. Es konnte hierbei jedoch noch kein stabiler ZuU
blieb der Servoregler
stand erreicht werden. Lediglich bei einer Drehzahl von 1000 min
mit einem Verstärkungsfaktor von 0,0015 bis 0,006 stabil. Allerdings stellte sich hierbei eine bleibende Regelabweichung von ca. 100
U
min
ein. Bei allen anderen gemessenen
Drehzahlwerten kam der P-Regler in einen Schwingungszustand, wie in den exemplarischen Messungkurven (Abbildung 8.3 bis 8.5) zu erkennen ist.
Chris Bauer
78
8.2. Messungen P-Regler
Zusätzlich bestand, wie schon in Kapitel 6 beschrieben, bei manchen Messungen das
Problem mit der Fehlererkennung, welche wahrscheinlich durch EMV-Störungen hervorgerufen wird.
Um den Regelkreis weiter zu optimieren, bedarf es zunächst einmal einem theoretischen Modell der Regelstrecke mit dem dazugehörenden Regelkreis. Zusätzlich sollte
in den nächsten Entwicklungsschritten dem Regler noch ein I-Anteil hinzugefügt werden, um bleibende Regelabweichungen zu verhindern.
Ein zusätzliches Problem stellt derzeit noch die Drehzahlmessung dar. Die Messung
ist zu langsam, weshalb die Drehzahl über den zu erreichenden Sollwert geregelt wird
und den Regler somit in Dauerschwingungen versetzt. Mit einer schnelleren Drehzahlmessung kann auch die Abtastzeit des Regelkreises angepasst werden.
Die Abtastzeit des Regelkreises beträgt derzeit 32,7ms. Hier wäre eine Zeit von ca. 10ms
wünschenswert. Alle Messkurven wurden mit einer Zeitdauer von 10 Sekunden aufgenommen.
U
Abbildung 8.3.: Testlauf 500 min
- Strombegrenzung am Netzteil 1,5A
Chris Bauer
79
8.2. Messungen P-Regler
U
Abbildung 8.4.: Testlauf 500 min
- Strombegrenzung am Netzteil 7,2A
U
Abbildung 8.5.: Testlauf 2000 min
- Strombegrenzung am Netzteil 7,2A
Chris Bauer
80
9. Zusammenfassung und Ausblick
9.1. Zusammenfassung
In dieser Bachelorarbeit sollte ein erster Entwurf eines temperaturbeständigen Servoreglers für bürstenlose Gleichstrommotoren aufgebaut und programmiert werden. Der
temperaturbeständige Servoregler soll später in Geothermie Bohrlochsonden eingesetzt werden können. In Tiefen von bis zu 5000m treten hierbei Umgebungstemperaturen bis zu 200°C auf.
Die Vielfalt an Elektronikkomponenten mit einer solchen Temperaturspezifizierung ist
sehr gering, vergleicht man diese mit der heute erhältlichen Standardelektronik. Es sind
nur sehr wenige Bauteile von wenigen Herstellern erhältlich. Bei den für den Servoregler notwendigen MOSFETs ist derzeit nur ein Bauteil mit passenden Parametern
erhältlich. Außerdem stellte sich schon zu Beginn der Arbeit heraus, dass die Hochtemperaturkomponenten, mit einer Lieferdauer von 12 Wochen, nicht mehr innerhalb des
Bearbeitungszeitraums geliefert werden können. Dadurch entstand die Notwendigkeit
den Leistungsteil des Servoreglers ersatzweise aus Standard-Elektronikkomponenten
aufzubauen, um die Software des Hochtemperatur Mikrocontrollers an einem bürstenlosen Gleichstrommotor testen zu können.
Es entstand im ersten Entwurf eine Leistungselektronik, welche gleich zur erhältlichen Hochtemperaturelektronik vom Mikrocontroller angesteuert werden kann. Zudem wurden alle für den Betrieb notwendigen Bauteile mit einer Spezifizierung bis
200°C Umgebungstemperatur erörtert, sodass die Elektronik, nachdem die Bauteile geliefert wurden, auch temperaturfest aufgebaut werden kann.
Die Software des Servoreglers konnte auf dem schon gelieferten Hochtemperatur Mikrocontroller von Texas Instruments implementiert werden. Es wurden in der ersten
Entwicklungsstufe die Betriebsmodi Rechtslauf und Linkslauf, sowie das aktive Bremsen in beide Drehrichtungen, umgesetzt. Außerdem wurde ein erster Reglerentwurf,
um die Drehzahl des Motors mit einem P-Regler zu stabilisieren, auf dem Mikrocontroller implementiert.
Chris Bauer
81
9.2. Ausblick
9.2. Ausblick
Die Entwicklung eines temperaturbeständigen Servoreglers mit dafür spezifizierten
elektronischen Komponenten hat sich im Laufe dieser Arbeit als machbar erwiesen.
Lediglich die Umsetzung mit entsprechenden Komponenten im Leistungsteil konnte
aufgrund der Lieferzeiten innerhalb des Bearbeitungszeitraums noch nicht durchgeführt werden.
In weiterführenden Arbeitsschritten steht nun zunächst der Aufbau der Hochtemperaturelektronik an. Hierbei muss beim Layout besonders darauf geachtet werden, dass
eine gute EMV-Verträglichkeit gegeben ist. Zuvor sollte aus diesem Grund das derzeitige Layout der Standardelektronik nochmals auf die Fehlerursache untersucht und diese Fehler entsprechend korrigiert werden. Hiermit kann Erfahrung in diesem Bereich
gesammelt werden, ohne dass das Layout der teureren Hochtemperaturelektronik in
mehreren Arbeitsschritten optimiert werden muss.
Des weiteren können Tests mit der Standardelektronik bei erhöhten Temperaturen
durchgeführt werden. Die Standardelektronik ist bis zu einer Halbleiterschichttemperatur von 175°C ausgelegt und für den bürstenlosen Gleichstrommotor von Maxon,
was die Stromtragfähigkeit betrifft, etwas überdimensioniert. Bei diesen Tests handelt
es sich um eine weitere, jedoch zeitaufwändige, Möglichkeit zu verifizieren, ob Bauteile
für den Betrieb in der Sonde geeignet sind.
Außer der Hardware bedarf es weitere Entwicklungsschritte in der Softwareimplementierung insbesondere beim Regelkreis des Servoreglers. Hierbei sollte zunächst
ein Modell der Regelstrecke, was den Motor und die angeschlossene Last beinhaltet, erstellt werden. Auf Grundlage dieses Modells lassen sich die Regelparamter des
Drehzahlregelkreises festlegen. Ebenfalls sollte die Auflösung des PWM-Signals vergrößert werden. Hierfür ist es notwendig sich tiefer in die Funktionsweise des High
End Timers einzuarbeiten. Außer dieser Optimierung im Programm muss die Drehzahlmessung noch einmal genauer Untersucht werden und mit den Ergebnissen ein
Algorithmus entwickelt werden, um die Drehzahlmessung in kleineren Umdrehungsschritten zu realisieren. Aus diesen Optimierungsmaßnahmen resultiert, von den direkten Änderungen am Regelkreis abgesehen, ein besseres Regelverhalten des Motors.
Zusätzlich sollte der Regelkreis um eine Notabschaltung, welche beim Blockieren des
Motors greift, ergänzt werden. Für die Überwachung der maximalen Dauerstromaufnahme wird es außerdem notwendig, die Messung der Umgebungstemperatur in den
Regelkreis zu integrieren, da sich dieser in Abhängigkeit der Temperatur verändert.
Chris Bauer
82
Literaturverzeichnis
[1]
A NTONS, Jochen: Studienarbeit: Definition des Funktionsumfangs und Entwicklung der
Algorithmen eines temperaturbeständigen Servoreglers für Bohrlochanwendungen. 2011
[2]
B AUER, Chris: Projektarbeit: Aufbau einer Platine mit dem temperaturbeständigen Mikrocontroller TI SM470R1B1M-HT. 2010
[3]
B OURNS:
Shuntwiderstand.
Version: Mai 2008.
http://docs-europe.
Abruf:
electrocomponents.com/webdocs/0ddc/0900766b80ddce56.pdf,
26.08.2011
[4]
B RUNNER, Dipl.-Ing G.: Elektrontechnik Skript 4. Semester. 07 2010
[5]
E VANSCAP: Hybrid Capacitor Products - High Temperature Series.
Version: 2009.
http://www.evanscap.com/HT_product_page.html, Abruf: 19.08.2011
[6]
G LIFTON: GaAs Power Diodes. http://www.clifton.ee/files/DULM15_04_01_10.
pdf, Abruf: 23.08.2011
[7]
G REENTECH:
Hermetically Sealed Wet Tantalum Capacitor.
http://www.
greentechee.com/productShow.asp?id=110, Abruf: 18.08.2011
[8]
I NSTRUMENTS, Texas:
TMS470R1x High-End Timer (HET) Reference Guide.
Version: Juni 2004. http://www.ti.com/lit/ug/spnu199d/spnu199d.pdf, Abruf:
31.08.2011
[9]
I NSTRUMENTS,
Texas:
TMS470R1x
System
Module
Reference
Guide.
Version: November 2004. http://www.ti.com/lit/ug/spnu189h/spnu189h.pdf,
Abruf: 01.09.2011
[10] I NSTRUMENTS, Texas: High End Timer (HET) Getting Started Guide. Version: Mai
2005. http://www.ti.com/lit/an/spna069/spna069.pdf, Abruf: 01.09.2011
[11] I NSTRUMENTS, Texas: TMS470R1x General-Purpose Input/Output (GIO) Reference
Guide. Version: Januar 2005. http://www.ti.com/lit/ug/spnu192d/spnu192d.
pdf, Abruf: 31.08.2011
Chris Bauer
83
Literaturverzeichnis
[12] I NSTRUMENTS, Texas: TMS470R1x Multi-Buffered Analog-to-Digital Converter (MibADC)Reference Guide.
Version: September 2005. http://www.ti.com/lit/ug/
spnu206c/spnu206c.pdf, Abruf: 01.09.2011
[13] I NSTRUMENTS, Texas:
TMS470M Series Technical Reference Manual (TRM).
Version: November 2010. http://www.ti.com/lit/ug/spnu495a/spnu495a.pdf,
Abruf: 03.09.2011
[14] I NSTRUMENTS, Texas: Voltage Output, Unidirectional Measurement Current-Shunt
Monitor INA 271.
Version: Mai 2010.
http://www.ti.com/lit/ds/symlink/
ina271.pdf, Abruf: 26.08.2011
[15] KAFADER, U.: Auslegung von hochpraezisen Kleinstantrieben: Grundlagen, Beispiele,
maxon selection program. Sachseln : Maxon Academy, 2006
[16] K EMET: Axial and Radial Ceramic Capacitors. http://www.kemet.com/kemet/web/
homepage/kechome.nsf/file/Complete%20High%20Temperature%20and%20High%
20Voltage%20Ceramic%20Catalog/$file/F3106.pdf, Abruf: 18.08.2011
[17] M AXON:
EC-Technik kurz und buendig.
http://shop.maxonmotor.com/maxon/
assets_external/Katalog_neu/eshop/Downloads/allgemeine_informationen/
Technik_kurz_und_buendig/newpdf_09/EC-Technik-kurz-und-buendig_09_DE_
026-27.pdf, Abruf: 20.07.2011
[18] M AXON: Maxon EC22 HD. Version: April 2009. http://test.maxonmotor.com/
docsx/Download/Product/Pdf/EC_22_HD_09_10_de.pdf, Abruf: 25.07.2011
[19] M AXON: Maxon EC Motor. Version: 2010. http://shop.maxonmotor.com/maxon/
assets_external/Katalog_neu/eshop/Downloads/CMS_Downloads/maxon_
academy/Professors_Desk/maxonECmotor_Handzettel.pdf, Abruf: 20.07.2011
[20] M AXON:
Bedienungsanleitung 1-Q-EC Verstärker.
Version: April 2011.
https://downloads.maxonmotor.com/Katalog_neu/eshop/Downloads/maxon_
motor_control/1-Q-EC-Verstaerker/DEC_Module_50_5/380200/380200_
Bedienungsanleitung_D.pdf, Abruf: 24.07.2011
[21] M AXON: Maxon Motor Programm 2011/12. Maxon, 2011
[22] M IKROCONTROLLER:
Leistungstreiber.
http://www.mikrocontroller.net/
articles/Treiber, Abruf: 20.08.2011
Chris Bauer
84
Literaturverzeichnis
[23] M IKROCONTROLLER: Leistungsverluste FET. http://www.mikrocontroller.net/
articles/FET], Abruf: 20.08.2011
[24] N OVACAP:
Hochtemperatur Kondensatoren.
http://www.novacap.com/pdfs/
HiTemp_ClassII.pdf, Abruf: 18.08.2011
[25] R ECTIFIER, International:
Datasheet Leistungstreiber IRS21844.
http:
//docs-europe.electrocomponents.com/webdocs/0dca/0900766b80dca3c5.pdf,
Abruf: 23.08.2011
[26] R ECTIFIER, International:
2010.
Datasheet MOSFET AUIRF1010EZ.
Version: März
http://docs-europe.electrocomponents.com/webdocs/0eaf/
0900766b80eaf384.pdf, Abruf: 24.08.2011
[27] S CHNEIDER, Woldemar: Taschenbuch für practische Bergleute und Bergwerksunternehmer. J. H. Heuser, 1857
[28] S EMICONDUCTOR, Fairchild: Application Note 6005. Version: April 2006. http:
//www.fairchildsemi.com/an/AN/AN-6005.pdf, Abruf: 23.08.2011
[29] S EMICONDUCTOR, Fairchild: Application Note AN-6076. Version: September 2008.
http://fairchildsemi.com/an/AN/AN-6076.pdf, Abruf: 25.08.2011
[30] S EMIKRON: Datenblatt SBH 1220TL ... SBH 1245TL Dioden. Version: November
2010. http://www.semikron.com/products/data/cur/assets/SBH_1220TL_SBH_
1245TL_03897988.pdf, Abruf: 06.09.2011
[31] T ERM W IKI:
single-access RAM (SARAM).
http://www.termwiki.com/EN:
single-access_RAM_%28SARAM%29, Abruf: 24.08.2011
[32] V ISHAY: 3-Phase Brushless DC Motor Controller. Version: Juni 2004. http://www.
vishay.com/docs/70012/si9979.pdf, Abruf: 30.08.2011
[33] V ISHAY:
Ultrafst Plastic Recitifier: UF4002.
Version: Mai 2006.
http:
//docs-europe.electrocomponents.com/webdocs/0928/0900766b809284f0.pdf,
Abruf: 25.08.2011
[34] V OGELMANN, Dr.-Ing H.: Elektrotechnik und Elektronik für Maschienenbauingenieure.
2001. – Kapitel 11.1 Gleichstrommaschine
[35] W IKIPEDIA: Kaskadenregelkreis. Version: Mai 2005. http://de.wikipedia.org/
wiki/Kaskadenregelung, Abruf: 011.09.2011. – Bild leicht modifiziert
Chris Bauer
85
Literaturverzeichnis
[36] W IKIPEDIA: Known Good Die. Version: Mai 2010. http://de.wikipedia.org/
wiki/Known_Good_Die, Abruf: 19.07.2011
[37] W IKIPEDIA: Brushless DC Motor. Version: Juli 2011. http://de.wikipedia.org/
wiki/B%C3%BCrstenloser_Gleichstrommotor, Abruf: 20.07.2011
[38] W IKIPEDIA:
Elektromagnetische Verträglichkeit.
Version: Juli 2011.
http:
//de.wikipedia.org/wiki/Elektromagnetische_Vertr%C3%A4glichkeit, Abruf:
29.08.2011
[39] W IKIPEDIA:
Gleichstrommaschine.
Version: September 2011.
http://de.
wikipedia.org/wiki/Gleichstrommaschine, Abruf: 05.09.2011
[40] W IKIPEDIA: Gray-Code. Version: März 2011. http://de.wikipedia.org/wiki/
Gray-Code, Abruf: 30.08.2011
[41] W IKIPEDIA: Kommutierung.
Version: März 2011. http://de.wikipedia.org/
wiki/Kommutierung, Abruf: 30.08.2011
Chris Bauer
86
A. Anhang
A.1. Ausschnitt Datenblatt Maxon EC 22 HD Motor
Chris Bauer
87
Heavy Duty Drive Solution.
EC motor Ø22 mm, bürstenlos, 80 / 240 Watt.
Hauptmerkmale
– Widersteht extremen Temperaturen (-55…200°C)
– Widersteht starken Schlägen und Vibrationen
– Hohe Zuverlässigkeit, auch unter harschen Umgebungsbedingungen
Der Motor ist ausgelegt um harsche Umgebungsbedingungen, wie extreme Temperaturen,
starke Schläge und Vibrationen oder auch hohe Umgebungsdrücke und Vakuum zu widerstehen. Selbst der Betrieb in Öl ist möglich.
Der einwandfreie Betrieb wurde nachgewiesen bei erweitertem Temperaturbereich von
-55°C bis 200°C – alle eingebauten Komponenten sind für Temperaturen von mindestens
240°C ausgelegt.
Schläge und Stösse sowie Vibrationen werden über den gesamten Temperaturbereich
absorbiert, ohne den Motor zu beschädigen.
Der Motor ist mit oder ohne Hall-Sensoren verfügbar. Diese werden, ähnlich einem Encoder, in einem Gehäuse untergebracht an den Motor angeflanscht (siehe Zeichnung).
maxon motor
1
1
driven by precision
EC 22 ∅22 mm, bürstenlos, 240 Watt
Heavy Duty – für Anwendungen in Öl
A mit Hall-Sensoren
A mit Hall-Sensoren
B sensorlos
1.6 x2.4
tief/deep
3x
15
120
Lage des Kabelabgangs
zum Befestigungsbohrbild
10
Alignment of cables relative
to mounting holes
10
M 1:1
Lagerprogramm
Standardprogramm
Sonderprogramm (auf Anfrage)
Bestellnummern
A mit Hall-Sensoren
B sensorlos
398663
398662
Motordaten (provisorisch)
Werte bei Nennspannung und Umgebungstemperatur °C
1 Nennspannung
V
2 Leerlaufdrehzahl
min-1
3 Leerlaufstrom
mA
min-1
4 Nenndrehzahl1)
5 Nennmoment (max. Dauerdrehmoment)1)
mNm
6 Nennstrom (max. Dauerbelastungsstrom)
A
7 Anhaltemoment
mNm
8 Anlaufstrom
A
9 Max. Wirkungsgrad
%
Kenndaten
W
10 Anschlusswiderstand Phase-Phase
11 Anschlussinduktivität Phase-Phase
mH
12 Drehmomentkonstante
mNm A-1
13 Drehzahlkonstante
min-1 V-1
14 Kennliniensteigung
min-1 mNm-1
15 Mechanische Anlaufzeitkonstante
ms
16 Rotorträgheitsmoment
gcm2
1)
25
48
12900
384
8560
149
4.53
460
13.4
71
70.5
100
48
13500
140
8640
120
3.64
346
10.3
71
70.5
150
48
13700
144
9240
92.9
2.9
295
8.98
70
70.5
200
48
13900
149
10700
57.2
1.88
256
7.93
70
70.5
3.59
0.357
34.4
278
29
2.31
7.63
4.64
0.357
33.5
285
39.5
2.31
3.15
7.63
5.35
0.357
32.9
290
47.2
2.31
3.77
7.63
6.05
0.357
32.3
296
55.4
2.31
4.42
7.63
Werte für Betrieb im thermischen Gleichgewicht.
Spezifikationen
17
18
19
20
21
22
23
24
25
26
27
28
Betriebsberiche
Thermische Daten
Therm. Widerstand Gehäuse-Luft
0.79 KW-1
Therm. Widerstand Wicklung-Gehäuse
0.75 KW-1
Therm. Zeitkonstante der Wicklung
4.8 s
Therm. Zeitkonstante des Motors
40 s
Umgebungstemperatur
-55 … +200 °C
Max. Wicklungstemperatur
+240 °C
Mechanische Daten (vorgespannte Kugellager)
Grenzdrehzahl
20000 min-1
Axialspiel bei Axiallast < 5 N
0 mm
>5N
max. 0.14 mm
Radialspiel
vorgespannt
Max. axiale Belastung (dynamisch)
4N
Max. axiale Aufpresskraft (statisch)
60 N
(statisch, Welle abgestützt)
250 N
Max. radiale Belastung, 5 mm ab Flansch
16 N
Weitere Spezifikationen
29 Polpaarzahl
30 Anzahl Phasen
31 Motorgewicht
Legende
n [min-1]
TA = 25°C
25000
TA = 100°C
TA = 150°C
20000
TA = 200°C
15000
240 W
200 W
10000
140 W
5000
80 W
20
40
1.0
80
60
2.0
100
3.0
120
140
4,0
M [mNm]
Dauerbetriebsbereich
Unter Berücksichtigung der angegebenen thermischen Widerstände (Ziffer 17 und 18) und der
angegebenen Umgebungstemperatur wird bei
dauernder Belastung die maximal zulässige
Rotortemperatur erreicht = thermische Grenze.
Kurzzeitbetrieb
Der Motor darf kurzzeitig und wiederkehrend überlastet werden.
Typenleistung
I [A]
Anwendung
Allgemein
1 – Anwendungen unter extremen Temperaturen
3 – Anwendungen mit Schlägen und Vibrationen (nach MIL-STD810F/Jan2000 Fig. 514.5C-10)
230 g – Betrieb in Öl und hohem Druck
Anschlüsse A, Motor Kabel PTFE (AWG 19)
rot
Motorwicklung 1
schwarz
Motorwicklung 2
weiss
Motorwicklung 3
Anschlüsse A, Sensoren Kabel PTFE (AWG 24)
grün
VHall 4.5…24 V
blau
GND
rot
Hall-Sensor 1
schwarz
Hall-Sensor 2
weiss
Hall-Sensor 3
Anschlüsse B, Motor Kabel PTFE (AWG 19)
rot
Motorwicklung 1
schwarz
Motorwicklung 2
weiss
Motorwicklung 3
Öl-und Gasindustrie
– Öl-, Gas- und geothermische Vorkommen
maxon-Baukastensysten
Referenzmedium: Shell Tellus Öl T15
maxon EC motor
Ausgabe März 2011 / Änderungen vorbehalten
A.2. Datenblatt UT Leistungswiderstände von SRT
A.2. Datenblatt UT Leistungswiderstände von SRT
Chris Bauer
90
SRT Resistor Technology
Silikon-beschichtete Leistungswiderstände
Typenbezeichnung: UT
Baugrößen: UT-1, UT-2, UT-3, UT-5, UT-6, UT-7, UT-10
Merkmale:
•
•
•
•
•
•
•
Widerstandswerte von 0,005 bis 260kOhm
Nennverlustleistung 0,1 bis 13Watt
Auslieferungstoleranzen bis ± 0,01%
niedriger Temperaturkoeffizient: ± 20ppm/K
MIL-R-26 / MIL-R-39007 Leistungsangaben
Temperatureinsatzbereich: -55°C bis +350°C („V”)
Nicht-induktive Wicklung verfügbar
Technische Daten:
Wert
Spezifikation
Auslieferungstoleranzen
Temperaturkoeffizient
Temperatureinsatzbereich
Isolationsfestigkeit
Konstruktion
±0.01% bis ±10%
( 1% Standard )
>10Ω : ±20ppm/K
1Ω to10Ω : ±50ppm/K
<1Ω : auf Anfrage
Charakteristik U: -55°C to +250°C
Charakteristik V: -55°C to +350°C
500 VAC : UT-1; UT-1/2A; UT-1/2; UT-1A
1000 VAC : alle anderen
Keramisches Grundelement, verzinnte Kupferkontakte
Hochtemperatur / trivalente / anorganische Silikonummantelung
verschweißte Kontakte
∆R
Environmental Performance
(MIL-STD 202)
Spannungsfestigkeit
Langzeitstabilität
Lagerung
Feuchte
Thermischer Schock
5X Überlast ( 5s )
Schock
Vibration
Charakteristik U
±0.2% + 0.05Ω
±1.0% + 0.05Ω
±0.2% + 0.05Ω
±0.2% + 0.05Ω
±0.2% + 0.05Ω
±0.2% + 0.05Ω
±0.1% + 0.05Ω
±0.1% + 0.05Ω
Charakteristik V
±0.2% + 0.05Ω
±3.0% + 0.05Ω
±2.0% + 0.05Ω
±2.0% + 0.05Ω
±2.0% + 0.05Ω
±2.0% + 0.05Ω
±0.2% + 0.05Ω
±0.2% + 0.05Ω
Bestellangaben:
Typ – Wert – Toleranz – TK (falls nicht Standard)
Beispiel: UT-5 10k ±1%
Ausgabe 07-2008
SRT Resistor Technology GmbH
Ostlandstr. 31
D-90556 Cadolzburg
Germany
Fon:
Fax:
E-mail:
Internet:
+49 (0)9103 / 7952-0
+49 (0)9103 / 5128
[email protected]
www.srt-restech.de
SRT Resistor Technology
Silikon-beschichtete Leistungswiderstände
Typenbezeichnung: UT
Baugrößen: UT-1, UT-2, UT-3, UT-5, UT-6, UT-7, UT-10
Abmessungen und Werte:
Type
UT-1
UT-1/2A
UT-1A
UT-2
UT-2A
UT-2B
UT-2C
UT-2E
UT-3
UT-5
UT-5A
UT-6
UT-7B
UT-7C
UT-10
Power Rating
(Watt)
Maximum
Value
“U”
“V”
Ohm
0.1
0.4
1.0
1.5
2.5
3.0
3.0
3.0
4.0
5.0
5.0
5.0
7.0
7.0
10.0
0.25
0.5
1.5
2.0
3.0
3.75
4.0
3.5
5.5
6.5
6.5
6.5
9.0
9.0
13.0
500
2.5k
10k
12.5k
22k
22k
40k
30k
45k
91k
65k
95k
100k
154k
260k
Für nicht-induktive Wicklung:
A [±1.6mm]
3.8
6.4
10.3
8.9
12.7
14.2
12.7
12.7
15.9
22.2
24.6
25.4
35.6
31.0
45.2
Dimensions
(mm)
B [±0.8mm]
2.0
2.0
2.4
4.0
4.7
4.7
6.4
5.1
6.4
7.9
5.2
7.9
7.9
7.9
9.5
Max. Working
Voltage
C [±0.05mm]
0.46
0.5 / 0.6
0.5 / 0.6
0.8
0.8
0.8
1.0 / 0.8
0.8
1.0 / 0.8
1.0
0.8
1.0
1.0
1.0
1.0
8.5
20
52
60
130
140
140
140
210
360
390
504
590
620
850
- max. Widerstandswert durch 2 dividieren
- Buchstabe “N” in Bestellcode einfügen (z.B. UTN-5)
Ausgabe 07-2008
Änderungen vorbehalten
SRT Resistor Technology GmbH
Ostlandstr. 31
D-90556 Cadolzburg
Germany
Fon:
Fax:
E-mail:
Internet:
+49 (0)9103 / 7952-0
+49 (0)9103 / 5128
[email protected]
www.srt-restech.de