Flyer - Beckhoff
Werbung

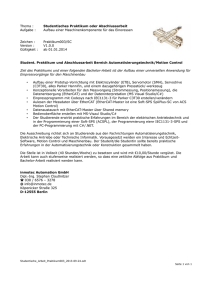
PC-based Control für Wind 4.0 Embedded-PC I/O-Module TwinCAT 3 Wind Framework PC-based Control: Die durchgängige Steuerungsplattform für Windenergieanlagen einheitliche Steuerungsplattform für Betriebsführung, Pitch-Control, Parkvernetzung Flexibilität beim Steuerungsdesign leistungsmäßige Skalierbarkeit modulare Erweiterbarkeit reduzierte Hardware- und Engineeringkosten erhöhte Effizienz und Wirtschaftlichkeit Basierend auf der PC- und EtherCAT-basierten Steuerungstechnik stellt Beckhoff weltweit erprobte Systemlösungen zur Verfügung: Mehr als 45.000 Windenergieanlagen bis zu einer Größe von 8 MW wurden weltweit mit Beckhoff-Technologie automatisiert. Als zentrale Steuerung fungiert ein Embedded-PC mit angereihten I/O-Modulen, EtherCAT, als durchgängiges Kommunikationssystem, und die Automatisierungssoftware TwinCAT. Robuste Hardwarekomponenten und die Nutzung industrieller Kommunikationsstandards bieten Anlagenbetreibern optimalen Investitionsschutz. 2 Technische Änderungen vorbehalten Big Data Betriebsführung Pitch-Control Parkvernetzung Das Beckhoff-Expertenteam für die Windenergie unterstützt Anlagenbauer mit langjähriger Branchenerfahrung: vom Schaltschrankbau bis zur Inbetriebnahme. Alle Funktionen, von der Betriebsführung, der Pitchregelung über die Visualisierung und die Sicherheitstechnik bis zum Condition Monitoring, dem Fernzugriff und der Windparkvernetzung, kommen auf einer zentralen CPU zum Ablauf. Flexibilität beim Steuerungsdesign, leistungsmäßige Skalierbarkeit und ein hoher Integrationsgrad – damit macht PC-based Control Windenergieanlagen noch effizienter und wirtschaftlicher: Die Modularität der Hardund Softwarekomponenten ermöglicht dem Anwender die Konfiguration einer leistungsgerechten Steuerung für seine Anlage und erlaubt nachträgliche Erweiterungen und Änderungen, beispielsweise das Nachrüsten von Condition Monitoring ohne großen Kostenaufwand. Mit dem TwinCAT 3 Wind Framework hat Beckhoff ein Softwaretool geschaffen, das den Gedanken von Industrie 4.0 in die Windenergie portiert und Anlagenbauer optimal bei der Programmierung ihrer Anlagen unterstützt. Ergänzt wird das Beckhoff-Leistungsspektrum durch den Schaltschrankbau, vom Schaltplanentwurf bis zur Prototypen- oder Serienfertigung. 3 Technische Änderungen vorbehalten Pitch-Control Embedded-PC, EtherCAT-Klemmen EtherCAT-Box-Module Eine Systemlösung für alle Steuerungsfunktionen Der Embedded-PC im Turmfuß sammelt und verarbeitet alle Daten, kontrolliert die Netzeinspeisung und kommuniziert mit der Leitwarte. Sicherheits- und Messtechnik sowie Condition Monitoring werden über entsprechende I/O-Module nahtlos in die Steuerung integriert. An den Leitrechner sind, via EtherCAT, der Umrichter im Turmfuß, das I/O-System zur Betriebsführung in der Gondel und der Pitch-Controller in der Nabe angebunden. Unterlagerte Feldbusse zur Ansteuerung von Subsystemen werden über entsprechende Schnittstellen ins Feld verlagert. Die durchgängige Nutzung von EtherCAT beschleunigt die Kommunikation, gleichzeitig vereinfachen sich Projektierung, Programmierung und Verkabelung der Windenergieanlage. Offene Schnittstellen in Hard- und Software erlauben die durchgängige Kommunikation vom Sensor bis in die Cloud. Pitch-Control Beckhoff bietet eine komplette Steuerungslösung für Pitchsysteme: Die hutschienenmontierbaren Embedded-PCs mit angereihten EtherCAT-I/O-Klemmen- oder -Box-Modulen in IP 67 eignen sich optimal zur Kollektivoder Einzelblattverstellung der Rotorblätter. Encoder-Klemmen für alle Arten von Blattwinkelgebern sind als Standard verfügbar. Intelligente Regelungsroutinen reduzieren die auf die Anlage einwirkenden Lasten und erhöhen so deren Lebensdauer. Betriebsführung Für die Betriebsführung in Turmfuß und Gondel steht eine vollständige Lösung in Hardund Software zur Verfügung, die mit TwinCAT 3 in IEC 61131, C/C++ und/oder MATLAB®/Simulink® programmiert wird. Die Anbindung an übergeordnete Leitsysteme erfolgt über international genormte Fernwirkprotokolle. Auf dem PC sind Server für den Remote-Access integriert, die den Fernzugriff auf die Steuerung erlauben. Über TwinSAFE wird die traditionell hart verdrahtete, überlagerte Sicherheitskette in die Automatisierung integriert. Die Kommunikation zwischen Turmfuß und Gondel wird kostengünstig und flexibel mit EtherCAT über Lichtwellenleiter realisiert. 4 Technische Änderungen vorbehalten Control Panel Betriebsführung Gondel Ethernet TCP/IP Safety-Input Safety-Output EtherCATI/O-System Safety-Input Condition Monitoring EtherCAT-Box-Module CANopen (optional) PROFIBUS (optional) Ethernet TCP/IP (optional) EtherCAT (LWL) Control Panel Betriebsführung Turmfuß Umrichter EtherCAT DVI/USB Ethernet TCP/IP (optional) PROFIBUS (optional) Ethernet TCP/IP EtherCAT-Klemmen CANopen (optional) Embedded-PC, EtherCAT-Klemmen Safety-Logic EtherCAT Parkvernetzung Big Data EtherCAT (LWL) ADS, OPC-UA, IEC 61400-25, IEC 61850, IEC 60870-5-104, Modbus TCP 5 Technische Änderungen vorbehalten Turbinensteuerung EtherCAT-LWL-Kabel (100BASE-FX) bis zu 2.000 m (multimode) oder 20.000 m (singlemode) CANopen (optional) PROFIBUS (optional) Ethernet TCP/IP (optional) Leitwarte Netzeinspeisung EL3783 CU1521 Ultraschnelle Windparkvernetzung: mit EtherCAT 6 ultraschnelle Windparkvernetzung Reaktionszeit unter 1 ms Strom- und Spannungsmessung mit 10.000 Samples/s optimaler Schutz vor Spannungseinbruch Überwachung heterogener Windparks durch standardisierte Kommunikationsprotokolle Die Erzeuger erneuerbarer Energien stehen vor der Herausforderung, Stromnetze bei Spannungseinbruch (LVRT) zu stützen. Hier setzt die Windparkvernetzung mit EtherCAT aufgrund ihrer hohen Geschwindigkeit neue Maßstäbe: Im Falle eines LVRT lassen sich die Sollwertvorgaben für alle Windkraftanlagen in weniger als 1 ms im gesamten Parknetz ermitteln und die Regelung von Strom, Spannung und Frequenz anpassen, sodass das Stromnetz optimal gestützt wird. Hierzu kann die bestehende Ethernet-Infrastruktur Technische Änderungen vorbehalten auf Basis von LWL-Technik ohne Einbußen bei der Geschwindigkeit, über Distanzen bis zu 20 km verwendet werden. Sogar die Synchronisation der IGBTs von Umrichtern innerhalb eines Windparks ist mit dieser Technik realisierbar. Die Windparkvernetzung mit EtherCAT ist nicht nur schneller im Vergleich zu konventionellen Ethernet-Lösungen, sondern bietet durch den Verzicht auf Switche oder Hubs auch Kostenvorteile. Technische Änderungen vorbehalten Über die in das Automatisierungssystem integrierte EtherCAT-Leistungsmessklemme EL3783 lassen sich Augenblickswerte von Strom und Spannung hochfrequent mit bis zu 10.000 Samples/s erfassen. Mit den „Distributed Clocks“ von EtherCAT sind die Messwerte aller Windkraftanlagen und die Messung am Einspeisepunkt eines Parks auf ein Zeitfenster kleiner als 1 μs synchronisierbar. TwinCAT unterstützt das standardisierte Kommunikationsprotokoll der IEC 61400-25 für Windenergieanlagen, wodurch die Überwachung und Steuerung heterogener Windparks, inklusive der Anbindung an die Stromversorger, vereinfacht wird. 7 Steuerungsintegriertes Condition Monitoring zeitsynchrone Aufzeichnung aller Daten deutlich << 1 µs zuverlässige Datenanalyse verbesserte Diagnostik erhöhte Anlagenverfügbarkeit längere Lebensdauer von Windenergieanlagen geringere Wartungskosten geringere Systemkosten verbesserte Wettbewerbsfähigkeit Der Betrieb und die Wartung moderner Windenergieanlagen verursachen nicht unerhebliche Kosten. Um diese wettbewerbsfähig zu halten, müssen die Ausfallrisiken minimiert, die Wartungskosten gesenkt sowie die Anlagenverfügbarkeit und die Energieeffizienz gesteigert werden. Hier kommt Condition Monitoring ins Spiel: Nicht nur für Offshore-Windenergieanlagen oder Anlagen in entlegenen Regionen, sondern generell empfiehlt sich die Überwachung von Getrieben und Generatoren. 8 Technische Änderungen vorbehalten Beckhoff nutzt die leistungsstarken Prozessoren moderner PC-Technologie und EtherCAT als schnelles Kommunikationssystem und integriert das Condition Monitoring nahtlos in die Steuerung. Dabei werden die Schwingungen von Lagern oder elektrischen Maschinen von Beckhoff-Standard-Messtechnikklemmen erfasst und über EtherCAT an die Steuerung übertragen. Konfiguration, Programmierung und Diagnose erfolgen mit TwinCAT in einem System. Das steuerungsintegrierte Condition Monitoring ist, was eine verbesserte Fehlererkennung und eine ganzheitliche Systembetrachtung angeht, den klassischen, hardwarebasierten Condition-MonitoringLösungen überlegen. Durch die Integration weiterer Signale aus der Betriebsführung, wie Temperaturen, Drücke und Strom, werden Fehlalarme vermieden und die Fehlererkennung verbessert. Insbesondere, wenn viele Daten von unterschiedlichen Teilnehmern zur Analyse herangezogen oder Schadfrequenzen drehzahlabhängig bewertet werden müssen, ist eine zentrale, PC-basierte Steuerung von Vorteil, die Signale im Mikrosekundenbereich erfassen und verarbeiten kann. Aber auch Kostensenkungen in Bezug auf die Systemkosten, den Installationsaufwand und die Wartung sprechen für ein steuerungsintegriertes Condition Monitoring. Bestehende Anlagen können einfach und kostengünstig nachgerüstet werden. 9 Technische Änderungen vorbehalten Zuverlässiges Condition Monitoring: in drei Schritten integriert Schritt 1 Schritt 2 Standardsteuerung einer Windenergieanlage EtherCAT (LWL) EL3783: Netzmonitoringklemme EL1252: 2-Kanal-Digital-Eingangsklemme mit Timestamp Hochfrequente Datenerfassung über EtherCAT-Klemmen Zur Überwachung der Netzspannung stehen in der Windanlagensteuerung die BeckhoffLeistungsmessklemme EL3783 mit Oversamplingfunktion zur Zustandserfassung eines 3-phasigen Wechselspannungsnetzes und die digitale Eingangsklemme EL1252 mit Zeitstempelfunktion zur zeitlich exakten Erfassung schneller binärer Steuersignale zur Verfügung. Bei einer Nachrüstung der Windenergieanlage mit Condition Monitoring muss die Turbinensteuerung lediglich durch einen Klemmenblock mit den entsprechenden EtherCAT-Messtechnikklemmen erweitert 10 Technische Änderungen vorbehalten Condition Monitoring Hardware Schritt 3 Condition Monitoring Software EL3632: 2-Kanal-Analog-Eingangsklemme für Condition Monitoring (IEPE) werden. Mit der EtherCAT-Klemme EL3751 steht ein Multifunktionseingang für analoge Messtechnik zur Verfügung. Die EL3632 ermöglicht den direkten Anschluss verschiedener Beschleunigungssensoren über eine Integrated Electronics Piezo-Electric (IEPE) und übernimmt die hochgenaue Schwingungsmessung. Über die EL3356-0010 lassen sich Dehnungsmessstreifen (DMS) auswerten. Die Aufzeichnung der Rohdaten erfolgt zeitsynchron (<< 1 µs) mit anderen Daten der Anlage, wie z. B. Leistung und Drehzahl, was zu einer höheren Zuverlässigkeit der Daten führt und Fehlalarme reduziert. Mit der TwinCAT-Condition-MonitoringBibliothek steht ein modularer Baukasten mathematischer Algorithmen zur Analyse von Messwerten zur Verfügung. Die Funktionen der Bibliothek erstrecken sich über die Hauptfelder Analyse, Statistik und Klassifikation. Neben der Spektralanalyse mit einer FFT oder mit einem einhüllenden Spektrum können statistische Kennwerte, wie die Kurtosis oder der Crest-Faktor, berechnet werden. Eine Kombination dieser Algorithmen mit einer Grenzwertüberwachung eignet sich beispielsweise hervorragend für eine Wälzlagerüberwachung. Alternativ erfolgt die Analyse der Zustandsdaten in der Condition-Monitoring-Software des Anwenders bzw. eines Drittanbieters, die über eine offene Schnittstelle, wie z. B. OPC, in die Beckhoff-Steuerungsplattform eingebunden wird. Bei Überschreitung voreingestellter, bauteilbezogener Schwellwerte löst das ConditionMonitoring-System Alarme aus, die den Anlagenbetreiber über Verschleiß, Unwuchten oder unzulässige Betriebszustände informieren. Diese Alarme können zur weiteren Verarbeitung direkt an die Steuerung der Anlage oder an weitere Betreibersysteme gemeldet werden. Die kontinuierliche Maschinenüberwachung kann selbstverständlich online erfolgen. Hierbei werden Trends in den Kennzahlen analysiert und in Handlungsempfehlungen übersetzt, etwa für die Planung von Wartungsintervallen. 11 Technische Änderungen vorbehalten 1 Framework mit 10 Jahren Know-how aus 45.000 Anlagen zukunftssichere Standardapplikationssoftware maximal vereinfachtes Engineering sichere und effiziente Softwareentwicklung erhöhte Softwarequalität und optimale Wiederverwendbarkeit deutlich reduzierte Time-to-Market tiefgreifende Überwachung und Interaktion dauerhaftes Aufzeichnen und Auswerten der Signale Nutzung der Industrie-4.0-Eigenschaften in der Windenergie Das TwinCAT 3 Wind Framework bündelt die Branchenexpertise von Beckhoff aus über 45.000 automatisierten Windenergieanlagen und macht das Konzept von Industrie 4.0 für die Windenergieindustrie verfügbar. Das modulare Softwarepaket umfasst alle notwendigen Funktionen und Tools für ein modernes und effizientes Engineering von Windenergieanlagen. Alle Basisfunktionen sind als TwinCAT-Module in TwinCAT 3 in einfach verwendbare Bausteine gekapselt. Sie bilden eine Art „Baukasten“ für den Programmierer und vereinfachen die Entwicklung der Anwendungssoftware. Neben den Grundfunktionen für Betriebs- 12 Technische Änderungen vorbehalten führung und Zustandsmaschine stehen Softwarebausteine für Ereignisverwaltung, Parameterkonfiguration, Benutzerverwaltung, Datenanbindung, Power- und Condition Monitoring sowie Simulation zur Verfügung. Die integrierte Datenbankanbindung „Big Data“ ermöglicht die umfassende Sammlung, Auswertung und Bereitstellung von Daten aus der Betriebsführung, dem Condition Monitoring und dem Power Management in Echtzeit. Alle Daten werden permanent aufgezeichnet, in der zentralen Steuerung zusammengefasst und detailliert analysiert. So lassen sich beispielsweise Verschleißerscheinungen an einzelnen Komponenten der Windenergieanlage, die zu einem Betriebsausfall führen könnten, frühzeitig erkennen, wodurch die Verfügbarkeit der Anlage erhöht wird. Die vorgefertigten Softwaremodule und Applikations-Templates sind getestet und erprobt und bieten eine hohe Qualität und Zukunftssicherheit. Einzelne Softwaremodule können – analog zu Veränderungen an der Hardware – hinzugefügt oder entfernt werden. Damit wird das Engineering maximal vereinfacht, und der Entwickler kann sich bei seiner Arbeit auf die eigentlichen Anlagenfunktionen konzentrieren. Optimiert wird die Entwicklungsarbeit auch durch die Aufteilung im Team: Entwicklung und Tests an kundenspezifischen Modulen können parallel durchgeführt werden und leisten damit einen weiteren Beitrag zu einer kürzeren Time-to-Market. Mit der durchgängigen Nutzung der TwinCATModule und der einheitlichen Architektur der Subsysteme entsteht ein Standard in der Applikation. Diese Standardisierung ermöglicht es dem Programmierer, sich schnell in die Applikation und den Source-Code einzufinden, auch wenn diese von einem anderen Programmierer umgesetzt wurden. 13 Technische Änderungen vorbehalten TwinCAT 3 Wind Framework Maximal flexibel: modulares Engineering für modulare Windenergieanlagen Modulare Steuerungsarchitektur für Windenergieanlagen Cloud Database TcCOM TwinCAT 3 Wind Parameter TcCOM TwinCAT 3 Wind Command TwinCAT 3 Wind Capture TcCOM TwinCAT 3 Wind Database TcCOM TwinCAT 3 Wind Statistics TwinCAT 3 Wind Proxy TcCOM TcCOM TwinCAT 3 Wind Status TcCOM TcCOM Framework (Generic) TwinCAT Transport Layer – ADS TwinCAT 3 Wind User PLC TcCOM Template (Specific) TwinCAT 3 Wind Library Supervisory Control Operational Control Simulation Pitch Rotor Generator Converter Yaw TwinCAT 3 Wind TwinCAT 3 Wind TwinCAT 3 Wind TwinCAT 3 Wind TwinCAT 3 Wind In Out In Out In Out In Out In Out Fieldbus Das TwinCAT 3 Wind Framework erlaubt durchgängiges und integratives Engineering über den gesamten Anlagenlebenszyklus. Als Programmiersprachen stehen neben der IEC 61131-3 auch C/C++ und MATLAB®/ Simulink® für eine objektorientierte, modulare Programmierung zur Verfügung. Dem Industrie-4.0-Gedanken folgend, ist das Engineering automatisiert und EngineeringWerkzeuge können untereinander Daten austauschen. 14 Die Programmierung einer Betriebsführung unter Verwendung des TwinCAT 3 Wind Frameworks wird durch eine Bibliothek und ein Applikations-Template erleichtert. Die Bibliothek stellt alle Funktionen des Wind Frameworks als SPS-Funktionsblöcke zur Verfügung. In dem Applikations-Template wird eine modulare Architektur für die Betriebsführungssoftware von Windenergieanlagen als SPS-Projekt bereitgestellt. Darin sind die Funktionalitäten der TwinCATModule und -Functions bereits vollständig umgesetzt. Jedes Subsystem (wie Pitch, Getriebe, Generator, Umrichter, etc.) der Windenergieanlage ist durch ein eigenständiges Objekt dargestellt. Somit können die Subsysteme unabhängig voneinander entwickelt, verwendet und getestet werden. Wie es in der mechanischen Modularisierung von Anlagen bereits üblich ist, sind die Subsysteme nun auch in der Software austauschbar. Damit wird die Qualität, Flexibilität und Wiederverwendbarkeit der Software erhöht und gleichzeitig reduzieren sich die Entwicklungszeit und -kosten. Technische Änderungen vorbehalten Die verschiedenen Betriebsmodi für das Starten, Stoppen und die übergeordnete Zustandsmaschine der Anlage sind in dem Applikations-Template als Supervisory Control zusammengefasst und bereits durch vereinfachte Implementierungen als SPS-Funktionsblöcke umgesetzt. Daraus entstehen übergeordnete Sollwerte für den Betrieb der Anlage, welche in die Regelung eingehen. Die allgemeine Regelung der Windenergieanlage, wie die Pitch- und Torque-Regelung, ist in der Software als Operational Control vorbereitet. Für die Regelung ist die Integration weiterer Module vorgesehen, um zum Beispiel die Algorithmen aus der Lastenrechnung zu übernehmen. Es besteht die Möglichkeit, die automatische Generierung eines TwinCAT-Moduls aus MATLAB®/ Simulink® heraus zu nutzen oder mittels C/C++ die Algorithmen zur Regelung einzubinden. Damit wird der gleiche Regler, der Das Applikations-Template stellt eine vollständige Betriebsführungssoftware bereit. Supervisory Control Actual Demand OutputUpdate Output MonitorUpdate Outbox InputUpdate Inbox Input ActualUpdate ControlUpdate für die Lastenrechnung verwendet wurde, auch in der Steuerung genutzt. Der Regler muss nicht erst in eine zweite Programmiersprache übertragen werden, wodurch die fehleranfällige Umsetzung der Algorithmen entfällt. Darüber hinaus ist eine adaptive Simulation der Windenergieanlage in die Applikation integriert. Dies ermöglicht ein Testen der gesamten Betriebsführung in der Entwicklungsumgebung. Dabei ist das Modell der Anlage frei konfigurierbar und auf die jeweilige Anlage anpassbar. Die verwendete Anlagensimulation wird als TwinCAT-Modul bereitgestellt, ist aber genauso wie die Regelung dafür vorbereitet, um bei Bedarf durch ein spezifisches Modell aus MATLAB®/ Simulink® oder C/C++ ersetzt zu werden. Mittels der integrierten Simulationen in der Applikation können die Vorgänge des Gesamtsystems, die Betriebsmodi und auch einzelne Subsysteme abgebildet, nachvollzogen und geprüft werden. Jedes Subsystem kann separat und unabhängig betrieben werden, indem zwischen Simulation und realer Hardware umgeschaltet wird. Dies ermöglicht es zum Beispiel, Teilkomponenten der Gondel in der Werkshalle in Betrieb zu nehmen und zu prüfen. Darüber hinaus wird der Aufbau von Testständen möglich, um Software-in-the-Loop- oder Hardware-in-the-Loop-Simulationen und sogar Schulungen direkt mit der originalen Applikationssoftware durchzuführen. Diese Echtzeitsimulationen ermöglichen ein Rapid Control Prototyping und virtuelle Inbetriebnahmen mit einer einzigen Version der Software und durch reine Parametrierung. Simulation Hardware Die einheitliche Architektur der Subsysteme erzeugt einen Standard in der Applikation und ermöglicht eine schnelle Einarbeitung der Programmierer. 15 Technische Änderungen vorbehalten TwinCAT 3 Wind Framework Decken alle Funktionalitäten ab: generische TwinCAT-Module als übergeordnete Dienste Betreiber Big Data Hersteller Big Data Optimierte Aufbereitung, Verfügbarkeit und Verarbeitung aller relevanten Daten in Echtzeit für Anlagenbetreiber und -hersteller W Datensammlung und Data-Warehouse W Datenauswertung und Data-Mining W Power und Condition Monitoring Kommunikation Engineering Durchgängiges und integratives Engineering über den gesamten Anlagenlebenszyklus W IEC 61131-3, C/C++, MATLAB®/Simulink® W Objektorientierung, Modularisierung W Datenaustausch zwischen Engineering-Werkzeugen W automatisiertes Engineering Sichere vertikale und horizontale Kommunikation W Unterstützung aller gängigen Bussysteme (EtherCAT, Ethernet, PROFIBUS …) W durchgängige(s) Messaging/Connectivity (ADS, OPC UA, Live-Diagnose, …) 16 Technische Änderungen vorbehalten Die Betriebsführung wird als eigenständiges TwinCAT-Modul und die Subsysteme werden als unabhängige Objekte implementiert. TwinCAT 3 Wind Status TwinCAT 3 Wind Parameter TcCOM TcCOM TcCOM TwinCAT 3 Runtime Operational Control Simulation TwinCAT 3 Wind Command TcCOM PLC Supervisory Control Pitch S Generator P I C Q S P I Converter C Q S P I Yaw C Q S P I C Q Hardware Die generischen TwinCAT-Module stellen die übergeordneten Dienste bereit. Jedes Modul ist direkt verwendbar und wird nur noch in TwinCAT 3 als TcCOM-Modul eingebunden. Die Module können einzeln und unabhängig voneinander verwendet oder miteinander kombiniert werden, um eine Interaktion und den Datenaustausch zu ermöglichen. Das Status-Modul bietet ein Überwachen aller Komponenten und ermöglicht die Fehlererkennung, Ereignisverwaltung sowie die Fehlerbehandlung und Berichterstattung. Es werden Status-Objekte angelegt, welche ein Ereignis darstellen und zum Anzeigen von Meldungen, Warnungen oder Fehlern genutzt werden. Ein Stoppen der Anlage kann optional für jedes Ereignis als Reaktion eingestellt werden, genauso wie das Auslösen einer hochaufgelösten Protokollierung der Anlagendaten oder das Versenden einer Benachrichtigung. Die Ereignisse werden vom Status-Modul ausgewertet und die entsprechenden Reaktionen generiert. Außerdem wird jedes Ereignis in der Datenbank protokolliert und mit Zeitstempeln ver- Technische Änderungen vorbehalten sehen; so lassen sich Häufigkeit und Dauer des Auftretens jedes Ereignisses bestimmen, und Aussagen über den Betrieb oder die Verfügbarkeit der Anlage treffen. Parameter- und Command-Module stellen Dienste zur Konfiguration und Interaktion mit der Applikation zur Verfügung. Ein Parameter-Objekt kann einen beliebigen Wert eines beliebigen Datentyps annehmen. Die Grenzen zur Überwachung einer Temperatur können beispielsweise als zwei ParameterObjekte umgesetzt werden, deren Werte die minimal und maximal erlaubte Temperatur angeben oder zum Ein- und Ausschalten der Heizung dienen. So kann die gesamte Konfiguration der Windenergieanlage über Parameter abgebildet, geändert, gespeichert und wieder geladen werden. Mit den Command-Objekten lassen sich Aktionen in der Applikation auslösen oder aktivieren. Jede Interaktion, zum Beispiel über einen Schalter an der Schaltschranktür oder einen Button aus der Visualisierung, kann über ein Command-Objekt umgesetzt werden. Das Erfassen von Signalen und eine statistische Auswertung werden vom Capture- und dem Mean-Modul bereitgestellt. Rohdaten werden flexibel über Capture-Objekte aufgezeichnet. Erste Auswertungen für die spätere Diagnose werden bereits in Echtzeit durchgeführt. So kann beispielsweise ein Aggregat und dessen Verhalten überwacht und die Schalthäufigkeit sowie Betriebsdauer einfach ausgelesen werden. Die integrierte Benutzerverwaltung prüft und protokolliert alle Interaktionen durch den Benutzer. Damit kann für jede Funktion bereits in der Programmierung festgelegt werden, welche Rechte notwendig sind, um diese zu verwenden. Das Überprüfen dieser Benutzerrechte geschieht in der Applikation. So gewährleistet die Betriebsführung eigenständig und unabhängig von einer externen Verwaltung den korrekten Zugriff durch einen Benutzer. 17 TwinCAT 3 Wind Framework TcCOM TwinCAT 3 Wind Command TcCOM TwinCAT 3 Wind Mean TcCOM TwinCAT 3 Wind Capture TwinCAT 3 Wind User TwinCAT 3 Wind Database TwinCAT Transport Layer-ADS TcCOM TwinCAT 3 Wind Parameter NonRT TwinCAT 3 Wind Database TcCOM TcCOM TwinCAT 3 Wind Status TcCOM Optimiert die Zuverlässigkeit und erhöht die Lebensdauer von Windenergieanlagen: Big Data TF6420 TwinCAT 3 Database Server SQL Server NonRT TwinCAT 3 Wind View Die Daten aus allen TwinCAT-Modulen werden über den TwinCAT 3 Database Server in einer SQL-Datenbank bereitgestellt. Alle Informationen von den verschiedenen TwinCAT-Modulen werden permanent und in Echtzeit an das Database-Modul übermittelt und über SQL-Prozeduren in die Datenbank eingefügt bzw. abgerufen. Die Verwaltung der Daten in der Datenbank erfolgt über den TwinCAT 3 Database Server. 18 Die Anbindung über das Database-Modul und den TwinCAT 3 Database Server an die SQL-Datenbank bietet eine effiziente und kompakte Datenhaltung über ein einheitliches und bekanntes Format. Das Aufzeichnen aller Ereignisse und Signale sowie das Speichern und Laden der gesamten Konfiguration aller Objekte ermöglichen detaillierte Analysen. Nötige Vorverarbeitungen geschehen durch die TwinCAT-Module in Echtzeit. So werden beispielsweise die Mittelwerte vom Mean-Modul durchgängig in jedem Zyklus der Applikation berechnet und jeder Wert aus jedem Zyklus geht in die Mittelung ein. Genauso werden das Abtasten von Werten und die Integrationen durch das Capture-Modul in jedem Zyklus ausgewertet, um die höchstmögliche Genau- igkeit der Berechnung zu erreichen. Durch das Erfassen und die Vorverarbeitung aller Daten in Echtzeit, welche dann zuverlässig in die Datenbank übertragen werden, können Auswertungen auf Anfrage und außerhalb der Betriebsführung geschehen. Mit Hilfe dieser historischen Daten können Zustandsänderungen erkannt, die Ursachen von Störungen ermittelt, detaillierte Statistiken berechnet und Optimierungen der Anlage durchgeführt werden. Das Schema der Datenbank ist so vorbereitet, dass die Daten von einer einzelnen oder von multiplen Anlagen in einer Datenbank gesammelt und verwaltet werden können. So lassen sich über vorbereitete Prozeduren die Daten einfach zusammenführen, um eine übergeordnete Analyse und Vergleiche durchzuführen. Werden die Daten aller Anlagen auf einem zentralen Unternehmensserver oder in der Cloud zu einem Data-Warehouse zusammengefasst, ist es möglich, die Daten dauerhaft und über die komplette Lebenszeit der Anlagen vorzuhalten. Solche Datenmengen von beliebig vielen Systemen, die in Echtzeit entstehen und auf zentralen Servern gesammelt werden, können allgemein als Big Data bezeichnet werden. Big Data stellt einen weiteren Baustein zu Industrie 4.0 dar und wird unterstützt durch die Möglichkeit, zusätzliche Daten aus dem Windpark-Management oder von Monitoring- und Messsystemen einzubinden. Einheitlich zugänglich, ermöglichen diese Daten weitreichende und auch automatisierte Auswertungen. Es lassen sich Störungen oder Unregelmäßigkeiten leicht erkennen, Statistiken berechnen und Optimierungen der Betriebsführung durchführen, bis hin zur zustandsbasierten Überwachung und vorausschauenden Wartung von Anlagen. Mittels Data-Mining lassen sich ganz neue Kenntnisse über den Betrieb der Anlagen gewinnen. Es könnten beispielsweise Zusammenhänge zwischen dem Verschleiß von Aggregaten mit deren Schalthäufigkeit und Betriebsdauer ausgewertet werden, um zukünftig das Aggregat zu tauschen, bevor es zu einem kostenintensiven Ausfall kommt. Technische Änderungen vorbehalten TcCOM TcCOM TwinCAT 3 Wind Storage TcCOM Pre-Trigger TwinCAT 3 Wind Capture Object TcCOM TcCOM TwinCAT 3 Wind Capture TwinCAT 3 Wind Trace TwinCAT 3 Wind Capture Object TcCOM TcCOM TwinCAT 3 Wind Status TwinCAT 3 Wind Capture Object Post-Trigger Bei wichtigen Ereignissen werden wesentliche Signale in einem hochaufgelösten Trace aufgezeichnet. TcCOM Farm Server TwinCAT 3 Wind Database Cloud Turbine Server Farm Server Enterprise Server Die Anlagendaten können auf einem zentralen Server zusammengefasst werden und ermöglichen übergeordnete Analysen. Technische Änderungen vorbehalten 19 Referenzen Hersteller/Zulieferer weltweit Xinjiang Goldwind Science & Technology Co., Ltd., Urumqi, China PC-basierte Steuerung von getriebelosen 1,5-, 2,5und 3-MW-Windenergieanlagen Industrie-PC: Embedded-PC CX1020 I/O-System: EtherCAT/PROFIBUS PROFIBUS-Buskoppler BK3150, PROFIBUS-Busklemmen-Controller BC3150, BX3100 Busklemmen EtherCAT-Klemmen Software: TwinCAT PLC www.goldwind.com.cn Guandong Mingyang Wind Power Technology Co. Ltd, China PC- und EtherCAT-basierte Steuerungsplattform für 1,5- und 2-MW-Windenergieanlagen Industrie-PC: Embedded-PC CX1020 Einbau-Control-Panel CP6901 I/O-System: EtherCAT-Klemmen, Busklemmen, TwinSAFE-Klemmen Software: TwinCAT PLC www.mywind.com.cn/English Zhejiang Windey Co. Ltd., Hangzhou, Zhejiang, China PC- und EtherCAT-basierte Steuerungsplattform für den 5-MW aeroMaster Industrie-PC: Schaltschrank-PC C6930, Embedded-PC CX2030, 15-Zoll-Multitouch-Control-Panel CP2915 I/O-System: EtherCAT-Klemmen, TwinSAFE-Klemmen Software: TwinCAT 3, TwinCAT 3 Wind Framework www.chinawindey.com/en/about.aspx www.aerodyn.de 20 Technische Änderungen vorbehalten AREVA Wind GmbH, Bremerhaven, Deutschland PC- und EtherCAT-basierte Steuerungsplattform der 5-MW-Windkraftanlage M5000 sowie Parkvernetzung für den ersten deutschen Offshore-Windpark (Alpha Ventus) Industrie-PC: Schaltschrank-PC C6515 Embedded-PC CX9020 Einbau-Control-Panel CP6832 I/O-System: EtherCAT-Koppler, Busklemmen Software: TwinCAT PLC www.areva-wind.com Weitere Referenzen W W W W W W Guodian United Power Technology Co., Ltd, Jiangsu Province, China DeWind Europe GmbH, Lübeck, Deutschland Vensys Energy AG, Neunkirchen, Deutschland Alstom Group, Levallois-Perret Cedex, Frankreich LEITWIND AG/SPA, Sterzing, Italien Renewtech LLC, Elbow Lake, MN, USA Pitch W Atech Antriebstechnik GmbH, Mehring, Deutschland W Dongfang Electric Corporation (DEW), Chengdu, China Bremsen W Svendborg Brakes A/S, Vejstrup, Dänemark Umrichter W TheSwitch, Vantaa, Finnland W Vensys Elektrik, Diepholz, Deutschland Gefahrenfeuer W Enertrag AG, Dauerthal, Deutschland Monitoring W 8.2 Monitoring GmbH, Hamburg, Deutschland W KONČAR Electrical Engineering Institute, Inc., Zagreb, Kroatien W GfM Gesellschaft für Maschinendiagnose mbH, Berlin, Deutschland W Zensor, Brüssel, Belgien 21 Technische Änderungen vorbehalten Weltweite Präsenz auf allen Kontinenten Beckhoff – New Automation Technology Beckhoff im Überblick Beckhoff realisiert seit über 30 Jahren offene Automatisierungssysteme auf der Grundlage PC-basierter Steuerungstechnik. Das Produktspektrum umfasst die Hauptbereiche IndustriePCs, I/O- und Feldbuskomponenten, Antriebstechnik und Automatisierungssoftware. Für alle Bereiche sind Produktlinien verfügbar, die als Einzelkomponenten oder als vollständige Systemlösung zum Einsatz kommen. Die „New Automation Technology“ von Beckhoff steht für innovative, branchenunabhängige Steuerungs- und Automatisierungslösungen, die weltweit in den verschiedensten Anwendungen, von der CNC-gesteuerten Werkzeugmaschine über die Windkraftanlage bis zur intelligenten Gebäudesteuerung, zum Einsatz kommen. O www.beckhoff.de Headquarters: Verl, Deutschland Umsatz 2015: 620 Mio. € (+22 %) Mitarbeiter weltweit: 3.000 Niederlassungen Deutschland: 14 Tochterunternehmen/Repräsentanzen weltweit: 34 Vertretungen weltweit: in über 75 Ländern Stand 04/2016 Mio. € Montreal Seattle Minneapolis Milwaukee Chicago San Jose London Toronto Detroit Cleveland Denver Rogers Austin Nashville Dallas Atlanta Houston Raleigh Charlotte San Luis Potosí Bogotá Quito Lima 5102 2015 4102 2014 3102 2013 2102 2012 1102 2011 0102 2010 7002 2007 9002 2009 6002 2006 8002 2008 5002 2005 4002 2004 3002 2003 2002 2002 0002 2000 9991 1999 10 02 2001 8991 1998 7991 1997 6991 1996 5991 1995 4991 1994 3991 1993 2991 1992 0991 1990 19 91 1991 9891 1989 8891 1988 7891 1987 6891 1986 5891 1985 4891 1984 3891 1983 2891 1982 Santiago Umsatzentwicklung 22 Boston Rochester Mechanicsburg N O R DA M E R I K A Los Angeles Phoenix San Diego 0891 1980 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 620 18 91 1981 630 620 610 600 590 580 570 560 550 540 530 520 510 500 490 480 470 460 450 440 430 420 410 400 390 380 370 360 350 340 330 320 310 300 290 280 270 260 250 240 230 220 210 200 190 180 170 160 150 140 130 120 110 100 90 80 70 60 50 40 30 20 10 0 Technische Änderungen vorbehalten S Weltweite Präsenz auf allen Kontinenten Weiterführende Informationen Die Webseite „PC-based Control für Windenergieanlagen“ enthält zusätzliche Informationen und Branchenlösungen. Durch die Präsenz von Beckhoff in über 75 Ländern erhalten global aktive Beckhoff-Kunden weltweit schnellen Service und technischen Support in der jeweiligen Landessprache. Darüber hinaus ist die geographische Nähe zum Kunden für Beckhoff die Grundvoraussetzung für das tiefe Verständnis der technischen Herausforderungen, vor denen die Kunden stehen. Die Beckhoff-Kataloge und -Flyer stehen im Internet zum Download zur Verfügung. O www.beckhoff.de/wind O www.beckhoff.de/media Bildnachweis: AREVA Wind, Deutschland | Atech Antriebstechnik GmbH, Deutschland | GfM Gesellschaft für Maschinendiagnose mbH, Deutschland | Guandong Mingyang Wind Power Technology Co. Ltd, China | Xinjiang Goldwind Science & Technology Co., Ltd., China | Zhejiang Windey Co. Ltd., Hangzhou, Zhejiang, China Beckhoff®, TwinCAT®, EtherCAT®, EtherCAT P®, Safety over EtherCAT®, TwinSAFE®, XFC® und XTS® sind eingetragene und lizenzierte Marken der Beckhoff Automation GmbH. Die Verwendung anderer in dieser Dokumentation enthaltenen Marken oder Kennzeichen durch Dritte kann zu einer Verletzung von Rechten der Inhaber der entsprechenden Kennzeichen führen. © Beckhoff Automation GmbH & Co. KG 09/2016 Seinäjoki Tampere Hyvinkää St. Petersburg Stockholm Tønsberg Vladimir Moskau Göteborg Verl Hobro Glasgow Kolding Haarlem Henley on Thames Malmö Solrød Lübeck Hannover Berlin Verl Moers Frankfurt Marktheidenfeld Nürnberg E U R O PA Shenyang Ankara ASIEN Teheran Beirut Lod Kairo Cluj-Napoca Delhi Riad Dubai Ahmedabad Mumbai Sofia Barcelona Madrid Athen İzmir Peking Zhengzhou Jinan Seoul Xi´an Qingdao Nanjing Wuxi Hefei Shanghai Chengdu Ningbo Wuhan Hangzhou Chongqing Changsha Kunming Taipeh Guangzhou Shenzhen Yokohama Pune Bangalore Coimbatore Istanbul Bursa Bangkok Chennai AFRIKA Kuala Lumpur Mosta Penang Singapur Jakarta S Ü DA M E R I K A São Paulo Novosibirsk Kaunas Piaseczno Kortrijk Lummen Brno Bras-sur-Meuse Hagenberg Balingen Paris Kottingbrunn München Anif Schaffhausen Budapest Orvault Innsbruck Lyssach Zürich Bürs Ljubljana Montagny-près-Yverdon Locarno Zagreb Metz-Tessy Padua Mailand Bologna Bilbao Aveiro Ekaterinburg Samara Campinas Joinville Montevideo Buenos Aires AUSTRALIEN Johannesburg Novo Hamburgo Durban Kapstadt Sydney Melbourne Headquarters Headquarters Distributor Niederlassung Niederlassung Distributor Auckland 23 Technische Änderungen vorbehalten DK3571-0916 www.beckhoff.de