NTS Kapitel 17
Werbung

Kapitel 17
Schwingungen und Wellen
In den bisherigen Kapiteln wurden Modellvorstellungen für die Erklärung von Phänomenen erarbeitet, die uns nun erlauben, Schwingungen und Wellenvorgänge zu
modellieren. In physikalischen Systemen ist schwingendes Verhalten in Hydraulik,
Elektrizität (und Magnetismus), Rotations- und Translationsbewegung leicht zu beobachten. In thermischen Systemen tritt es bei besonders tiefen Temperaturen oder
speziell schnellen Vorgägngen auf, ist aber im Alltag kaum erkenntlich. Chemische
Schwingungen gibt es zu hauf, sie sind aber nicht so einfach zu modellieren.
In den Modellen, die in den Kapiteln 5, 14 und 15 erarbeitet wurden, kamen Schwingungen im Prinzip schon vor. Wir haben das Phänomen aber nicht weiter untersucht.
In diesem Kapitel soll deshalb die Beschreibung von Schwingungen und Wellenausbreitung ausgebaut und vertieft werden.
Schwingendes Verhalten. Schwingendes Verhalten erkennt man daran, dass ähnliche Muster wiederkehren, wobe weder die Stärke der Veränderungen noch die Periode der Wiederkehr immer gleich sein Muss (Abb.17.1).
2
Electric current
1.5
0
0.01
0.02
Time / s
Number of furs / 1000
100
80
X
X
X
Lynx
Hare
[
XX
[
[
X
[
[
[
X
[
[
X
40
X
X
X
[
[
X
X
[ X[ [
XX
X
X
X
20
[X XX[ X [
X
[
[ X[
[
[ [
[
[
X
[ X X[
[
[
[
[
XX X
0[
60
1900
1910
1920
Time / a
1930
4
10
2
Acceleration
0
0
-10
-2
-20
Speed / m/s
Speed
-4
0
2
4
Time / s
6
8
100
90
Utilization
50
85
0
80
-50
75
Utilization (%)
2.5
20
Acceleration / m/s^2
UC / V
3
0.08
0.06
0.04
0.02
0
-0.02
-0.04
-0.06
0.03
DInventory / 10^9 US$
Voltage
Electric current / A
4
3.5
∆Inventory
-100
1960
1970
1980
Time / a
1990
70
2000
Abbildung 17.1: Beispiele von schwingendem Verhalten in physikalischen (oben),
biologischen (unten links) und ökonomischen (unten rechts) Systemen. Oben links:
Elektrischer Schwingkreis (Spule zwischen zwei Kondensatoren). Oben rechts: Klotz
bewegt sich senkrecht an Gummiseil (bungee jumper). Unten links: Luchse fressen
Hasen (Räuber-Beute System). Unten rechts: makroökonomische Zyklen.
404
Schwingungen und Wellen
Schwingendes Verhalten kann man besonders klar in einer speziellen Datstellung erkennen, die man Phasendiagramm nennt (Abb.17.2). Wenn wir ein System haben,
in dem sich wie in den Diagrammen in 17.1 zwei Variablen rythmisch ändern, dann
kann man die eine gegen die andere auftragen. Obwohl die Zeit dann nicht mehr
explizit im Diagramm ersichtlich ist, erkennt man deutlicher, dass es sich um zyklische Prozesse handelt: die Kurve, die man Trajektorie nennt, kurvt mehre Male in
mehr oder weniger komplizierter Art durch den Phasenraum.
4
Start
Start
0.05
Speed / m/s
Electric current / A
0.1
0
-0.05
-0.1
0
End
-2
-4
1.5
2
60
2.5
3
3.5
Voltage UC1 / V
4
-20 -15 -10 -5
0
5 10
Acceleration / m/s^2
X
X
X
X
40 X
X X
15
90
1968
Utilization
X
X
X
X Start
X
Utilization (%)
X
Lynx furs / 1000
2
X
20 X
X
X
X X
X X
X X
XX
X
X
X XX
X
0
0
20
40
60
80
Hare furs / 100
100
ÉÉÉÉ É É
É
ÉÉ
É É
É
É
É É
É É É
É
É
É É
É
É
1970 ÉÉ É ÉÉÉÉ É É 1980
É
É É É
É
ÉÉÉ
É
É
É ÉÉ
É
É É É É ÉÉ
É
É
ÉÉ
1995 É 1990
É
É
É
ÉÉ
1977
É
ÉÉ
É
É
É
É
É
É
ÉÉÉÉ É É É
É
É É É ÉÉ É
É 1985
ÉÉ
É
É
É
É 1975 É É É É
É
É
É
É
É
É
É
ÉÉ
É
É 1982
É
É
É
ÉÉ É
1973
85
80
75
-100
-50
0
50
100
Inventory Difference / 10^9 US$
Abbildung 17.2: Phasendiagramme der vier Beispiele von Schwingungen in
Fig.17.1. In einem Phasendiagramm wird eine der beiden Variablen gegen die andere
Aufgetragen – die Zeit ist nicht mehr direkt sichtbar.
Ursachen für Schwingungen. Man kann die Ursachen für schwingendes Verhalten
von Systemen in drei Kategorien zusammen fassen:
1. Systeme mit Speichern und Transporten, bei denen die Ströme Trägheit zeigen
(induktives Verhalten);
2. Verzögerungen bei der Reaktion auf Änderungen in Systemen mit Speichern
und Transporten;
3. Wechselwirkung zwischen zwei oder mehr Spezies (Speichergrössen), wie sie
bei Räuber-Beute Systemen in der Biologie, bei chemischen Reaktionen oder
in ökonomischen Systemen auftreten.
Beispiele der ersten Kategorie kennen wir schon aus Kapitel 5. Dort haben wir gesehen, dass induktives Verhalten zu Schwingungen führt, wenn man induktive Elemente mit Speichern kombiniert – so beim elektrischen Modell des Blutkreislaufs,
wo wir Kondensatoren, Widerstandselemente und Spulen für das Windkesselmodell
verwendet haben. Das Selbe gilt natürlich für das hydraulische System des Blutkreislaufs.
Allgemein heisst das, wenn wir Systemmodelle durch die Speicherung von fluidartigen Grössen (Volumen, Ladung, Impuls, Drehimpuls, Entropie, Stoffmenge) und
deren Transport darstellen können, und wenn die Transporte dem Phänomen der
Trägheit unterliegen, dann sind Schwingungen möglich. Wenn man schliesslich Modellteile dieser Art für räumlich ausgedehnte Materialien statt für homogene Sys-
405
teme zusammenfügt, so erhält man Darstellungen von Wellenausbreitung in ausgedehnten Medien.
Der zweite Grund für Schwingungen ist mit dem Phänomen der Induktion stark verwandt. Wenn wir in Modellen der Speicherung und des Transports Verzögerungen
einbauen, so kann es auch zu schwingendem Verhalten kommen. Beispiele dazu sind
die Temperaturregellung in einer Dusche, bei der man verzögert auf die Änderung
der Temperatur reagiert, oder die Änderung der Temperatur verzögert auf die Regelung folgt. In diese Kategorie gehören auch viele Phänomene im Wirtschaftlichen
Bereich, so wenn man auf Änderungen in einem Lager (Inventar) verzögert mit Änderungen der Produktion (Auslastung der Kapazität) reagiert; so erklärt man zum
Beispiel auch die makroökonomischen Zyklen mit den alle Jahre wieder auftretenden
Hochs und Tiefs.
Die letzte Kategorie hat mit der Wechselwirkung von zwei oder mehr Spezies zu
tun, wie sie in der Populationsbiologie oder in bei chemischen Reaktionen auftreten. Konkurrenz zwischen zwei Spezies wie Luchsen und Hasen zeigen typisches
Verhalten wie bei einfachen schwingenden physikalischen Systemen (sieh die beiden
Diagramme in Abb.17.1, oben links und unten links): eine der Grössen reagiert mit
ihren Änderungen verzögert auf die Änderungen der anderen.
Box 15.1: Zwei Formen von Zeit
In der altägyptischen Kultur war die Unterscheidung zwischen linearer und zyklischer Zeit gebräuchlich. (In alten nordamerikanischen Kulturen war sicher die
Vorstellung von zyklischer Zeit vorhanden, wie weit lienare Zeit eine erst durch
die Europäer gebrachte Vorstellung ist, scheint unklar.)
Dahinter stehen zwei grundlegende Beobachtungen zur Dynamik in der Welt. Es
gibt Dinge, die scheinen sich im wesentlichen in eine Richtung zu verändern. Im
Gegensatz dazu stehen Veränderungen, bei denen ein System wieder zu seinem
Ursprung zurück kehrt, worauf dann die Veränderung von Neuem beginnt.
Heute sprechen wir im ersten Fall von säkularer Entwicklung – Evolution ist eine
gute Art, diese Form der Veränderung zu bezeichnen. Biologische Evolution, Entwicklung des Universums oder von Sternen, Leben von Geburt zu Tod gehören in
diese Kategorie. In alten Kulturen hätte man gesagt, dass diese Phänomene uns
die lienare Zeit zeigen. Rythmen wie Tag und Nacht gehören demhingegen zu den
Phänomenen, die zum Konzept der zyklischen Zeit geführt haben.
1. Sieht man in den Daten der CO2 Konzentration in der Erdatmosphäre in Abb.1.5
säkulare Veränderung (Trends)? Sieht man dort zyklische Veränderungen?
2. Gibt es in den Daten in Abb.17.3 säkulare und zyklische Veränderungen?
3. Wie lang sind die Zyklen im elektrischen Schwingkreis (Abb.1.5, oben links)? Sind
sie konstant? Wie lang sind die Zyklen der Schwingung im Räuber-Beute System
von Luchsen und Hasen (Abb.1.5, unten links)?
4. Wie kommt man von der Darstellung der Daten im Diagramm oben links in Abb.17.1
(elektrische Schwingungen) zum zugehörigen Phasendiagramm in Abb.17.2?
Aufgaben
406
17.1
Schwingungen und Wellen
Phänomene und Wortmodelle
In physikalischen Systemen kommen Schwingungen in den verschiedensten Phänomenbereichen vor (nur bei thermischen Prozessen hat man Mühe, sie zu finden, aber
es gibt sie auch dort). Wasser kann hin und her schwappen, elektrische Schwingkreise gibt es nicht nur im Radio, in mechanischen oder chemischen Systemen schwingt
fast immer irgend etwas.
Schwingunen in solchen Systemen sind oft relativ einfach, darum lohnt sich ihr Studium für den Anfang. Wir werden aber Beispiele von schwingenden Systemen der
drei oben erwähnten Kategorien beschreiben und versuchen, die Gründe für schwingendes Verhalten in Wortmodellen festzuhalten. Chemische, biologische, ökologische
und ökonomische Systeme machen Schwingungen aber zur wissenschaftlichen und
mathematischen Herausforderung.
17.1.1
Hydraulische und elektrische Schwingungen
Im Prinzip ist ein hydraulisches System aus zwei Tanks und einem verbindenden
Schlauch am Boden (Abb.17.3, links) eine Einrichtung, in der eine Flüssigkeit hinund her schwingen kann. Da das aber bei einem dünnen Schlauch kaum auftritt, ist
vermutlich die Reibung daran Schuld, dass es nicht zu Schwingungen kommt.
Quecksilber im U-Rohr. Tatsächlich beobachtet man Schwingungen leicht, wenn
man aus den beiden Behältern und dem Schlauch ein U-Ror macht und ein nicht
zu zähes Fluid wählt (Wasser oder Quecksilber). Bläst man in einen der Schenkel,
um die Flüssigkeit aus dem Gleichgewicht zu bringen, schaukelt sie eine Weile lang
um die Gleichgewichtslage hin und her, bis sie schliesslich doch zur Ruhe kommt
(Abb.17.3, rechts) – wie bei den beiden Tanks mit dem Schlauch ist die Reibung
beim Fliessen Schuld am Abklingen der Amplitude der Schwungung.
Level / mm
440
420
400
380
360
0
5
10
15
Time / s
20
Abbildung 17.3: Wenn man anstelle von zwei kommunizierenden Tanks mit dünnem Verbindungsrohr ein U-Rohr verwendet, schaukelt die Flüssigkeit hin und her.
Im Diagramm rechts sieht man eine gedämpfte Schwingung: gemessen wurde die
Füllhöhe von Quecksilber in einem der Schenkel des U-Rohres.
Unsere bisherigen Modelle, die das Phänomen der Induktion vernachlässigen, kommen zu einem anderen Bild (Kapitel 2.1.2): Die beiden ursprünglich verschiedenen
Füllniveaus nähern sich direkt einem gemeinsamen Gleichgewichtswert an; die Form
ist die eines exponentiellen Angleichs. Man erhält übrigens das gleiche Bild bei einem
U-Rohr, das man mit einer sehr zähen Flüssigkeit füllt. Dass ein System im Prinzip
Schwingungen zulässt, heisst also noch nicht, dass es tatsächlich zu Schwingungen
kommt.
Wie kommt es nun zur Schwingung der Flüssigkeit im U-Rohr, und was hat der
induktive Effekt damit zu tun? Wir lenken die Flüssigkeit aus, so dass sie im einen
17.1 Phänomene und Wortmodelle
407
Schenkel höher steht als im anderen. Damit haben wir einen Antrieb (Potentialdifferenz) für den hydraulischen Vorgang, die Flüssigkeit fängt an zu fliessen. Das
heisst, dass die anfängliche Potentialdifferenz ganz für den Anschub des Stromes
verantwortlich ist. Die Stromstärke nimmt zu, und wenn wir für den Moment Reibung vernachlässigen, dann wird die Stromstärke genau dann den höchsten Wert
erreichen, wenn die Füllhöhen in beiden Schenkeln gleich geworden ist. Ohne den
Einfluss der Trägheit des Stromes wäre die Situation gerade umgekehrt: wir hätten
den höchsten Wert des Stromes genau am Anfang, und der Strom wäre Null, wenn
die Füllhöhen links und rechts gleich geworden sind.
Im Fall von Schwingungen wird die Flüssigkeit also überschwingen, das Niveau im
ersten Schenkel wird unter den Gleichgewichtsstand sinken, und schliesslich wird die
umgekehrte symmetrische Situation des Anfangszustands erreicht (falls wir keine
Reibung haben). Darauf nimmt das Phänomen in umgekehrter Richtung seinen
Fortgang.
R
L
B
A
C
D
E
C2
4
Voltage
3
2
0.06
Current
0
UC1
UC2
0
0.01
0.02 0.03
Time / s
0.04
-0.06
0.05
Electric current / A
Usol
Solenoid
C1
Voltage UC / V
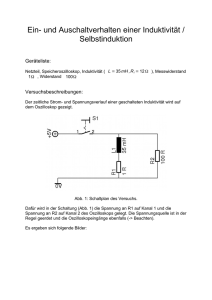
Elektrischer Schwingkreis. Das selbe Verhalten sieht man, wenn man eine Spule
zwischen zwei Kondensatoren in einen einfachen Stromkreis steckt (Abb.17.4), und
wie schon so oft sind die Erklärungen für die hydraulischen und die elektrischen
Systeme analog. Wenn sich die Spule einfach wie ein Widerstandselement verhalten
würde, so ergäbe es keine Schwingung. Wir kennen das Verhalten aus Kapitel 4.1,
Abb.4.1). Es ist genau gleich wie bei zwei Tanks mit einem dünnen Rohr dazwischen.
Abbildung 17.4: Eine Spule — hier ohne Eisenkern — zwischen zwei (verschieden)
geladenen Kondensatoren (C1 = 60 µF, C2 = 95 µF) führt zu einer Schwingung der
elektrischen Grössen.
Die Tatsache, dass es eine Spule braucht—und dass ein Eisenkern in der Spule den
Effekt verstärkt—deutet darauf hin, dass Induktion an der Schwingung Schuld ist.
Nun hatten wir beim Anfahren von Strömen auch schon mit Induktion zu tun, aber
es gab keine Schwingungen. Deshalb ist induktives Verhalten nur die halbe Miete: es
braucht auch noch Speicher (kapazitives Verhalten), damit eine fluidartige Grösse
wie elektrische Ladung oder Volumen hin- und herpendeln kann.
In Alltagssprache sieht die Erklärung etwa folgendermassen aus. Wegen der Differenz der elektrischen Potentiale bei A und E (Abb.17.4) sollte Ladung vom einen
zum anderen Kondensator fliessen. Diese Spannung führt aber anders als bei einem
Widerstandselement nicht augenblicklich zu einem elektrischen Strom – die Stromstärke muss von Null an wachsen. Dazu braucht es wegen des induktiven Elementes
eine Spannung – eben die Spannung ϕA − ϕE . Wegen des Ladungstransports passieren nun zwei Dinge: die Spannung zwischen A und E nimmt ab, und der davon
für die Änderung der Stromstärke zur Verfügung stehende Teil nimmt ab, weil die
Spannung über dem Widerstandselement höher wird. Wenn wir für den Moment
408
Schwingungen und Wellen
vom Effekt des Widerstandselementes absehen, passiert genau das Gleiche wie im
Fall der Flüssigkeit im U-Rohr. Die Stromstärke erreicht genau dann ihr Maximum,
wenn die Potentiale bei A und bei E gleich geworden sind. Nun fliesst die Ladung
wegen ihrer (magnetischen) Trägheit weiter, das Potential bei E wird höher als bei
A, und so weiter.
Aufgaben
5. Zeigt das Beispiel des Windkesselmodells in Abb.3.24 oder Abb.4.3 nicht Schwingungen, die es gar nicht geben darf?
6. Wenn wir beim Phänomen der Induktion bei hydraulischen Vorgängen von Trägheit
eines Stromes reden, worin besteht diese Trägheit? Worin besteht sie in elektrischen
Systemen?
7. Warum nimmt der Ausschlag der Füllhöhe in Abb.17.3 (rechts) mit der Zeit ab?
8. Wenn man das U-Rohr in Abb.17.3 mit einer ganz zähen Flüssigkeit füllt und die
Füllhöhen auslenkt, kommt es dann zu Schwingungen?
9. Was passiert mit der Schwingung in der elektrischen Schaltung in Abb.17.4, wenn
man (a) die Kapazität der Kondensatoren ändert; (b) die Induktivität der Spule
ändert; (c) den Widerstandswert des Spulendrahtes ändert? Gelten die Überlegungen
analog für den hydraulischen Fall von zwei Tanks mit einem Verbindungsrohr?
10. In allen vier Diagrammen in Abb.17.1 sind die Phasen der zwei dargestellten Kurven
gegeneinander verschoben (Maxima und Minima erfolgen nicht zur selben Zeit). Haben wir das Maximum der Kurve für die elektrische Stromstärke (oben links), wenn
die Spannung das Minumum erreicht, oder wenn sich die Spannung am schnellsten
ändert? Gilt diese Art Beziehung mehr oder weniger auch für die anderen Beispiele?
11. Wie sieht die Kurve für die Volumenstromstärke in Abb.17.3 aus?
12. Kann man das elektrische Schaltungsdiagramm als analoge Darstellung für eine Flüssigkeit in einem U-Rohr verwenden? Wenn ja, wie? Wenn nein, warum nicht?
13. Sind die Ausschläge (Amplituden) der beiden gemessenen Spannungen über den
Kondensatoren (Abb.17.4, rechts oben) gleich oder verschieden? Warum?
17.1.2
Torsionsschwingung
Wenn man eine Torsionsfeder an aner Achse befestigt, so können an der Achse
aufgehängte Körper hin und her schwingen (Abb.17.5). Wir haben das in Kapitel
14 durch die Wechselwirkung eines Drehimpulsspeichers (dem rotierenden Körper)
und der Torsionsfeder gedeutet. In Abb.17.5 ist der Körper eine aus Stange und zwei
Gewichten geformte Hantel. Die Achse steht senkrecht. Wenn man die Hantel aus
der Ruhelage um einen bestimmten Winkel auslenkt, dann wird die Feder gespannt
– Drehimpuls fliesst durch sie hindurch.
Der rotierende Körper hat in Analogie zu den bisher untersuchten Systemen die
Eigenschaft eines kapazitiven Elementes. Die Feder funktioniert als induktives Element: ein sich zeitlich ändernder Drehimpulsstrom durch die Feder ist mit der Änderung des Drehwinkels verbunden. (Zur Erinnerung: die Winkelgeschwindigkeit ist
das Potential der Drehbewegung.) Da die zeitliche Änderung des Drehwinkels durch
die Differenz der Winkelgeschwindigkeit zwischen Rotationskörper und fester Verankerung der Feder entspricht, haben wir die Bedingung eines induktiven Phänomens:
die Änderungsrate des Drehimpulsstromes hängt mit der Differenz der zugehörigen
Winkelgeschwindikeit über der Feder zusammen.
17.1 Phänomene und Wortmodelle
409
60
Angle / deg
40
20
0
-20
-40
-60
0
10
20
Time / s
30
40
Abbildung 17.5: Eine Hantel schwingt um eine senkrechte Achse. Die Achse ist
durch einer Torsionsfeder mit der Aufhängung verbunden. Das System bildet eine
Hantel, die um die senkrechte Achse schwingen kann. Rechts sieht man die Daten
für den Drehwinkel des Stabes als Funktion der Zeit.
Das Wortmodell für den Schwingungsvorhang ist – abgesehen von der Dämpfung –
weitgehend analog zu den bisherigen Erklärungen. Wenn wir die Hantel in Abb.17.5
mit der Hand auslenken und fest halten, haben wir zwei Drehimpulsströme, einen
von der Hand, den anderen durch die Feder, und die Winkelgeschwindigkeitsdifferenz
zwischen Hantel und Halterung ist Null. Wenn wir nun los lassen, wird Drehimpuls
in die Hantel fliessen (oder je nach gewählter Drehrichtung oder Anfangsbedingung
aus der Hantel heraus). Dadurch ändert sich die Winkelgeschwindigkeit, die Differenz der Winkelgeschwindigkeit über der Feder wächst, und gleichzeitig ändert
sich auch der Drehimpulsstrom – er wird schwächer. Also ändert sich die Winkelgeschwindigkeit weniger schnell, und so weiter. Wenn dann die Hantel durch die
Ruhelage geht, ist der Drehimpusstrom null geworden, seine Änderungsrate und die
Winkelgeschwindigkeitsdifferenz sind nun aber maximal. Die Hantel schiesst über
die Gleichgewichtslage, die Bewegung geht in die andere Richtung bis zum vollen
Ausschlag. Danach wiederholt sich das Spiel in umgekehrte Richtung.
Maximum amplitude
Wenn Reibung mit im Spiel ist, ist die Form der Bewegung allerdings nicht symmetrisch um die Ruhelage, die Amplitude nimmt mit der Zeit ab. Man sieht im
Doagramm rechts in Abb.17.5, dass die Form der Abnahme anders ist als die bei
den hydraulischen und der elektrischen Schwingungen (Abb.17.3 und 17.4). Das
bestätigt sich durch Messung der maximalen Ausschläge (Abb.17.6).
Electric
J
oscillator
JH
BJ
B
JB
Torsion
JBB
JH B
oscillator
J BB
J
JJH BB
BB
JJ
BB
JJH
B
BB
JJ
JJJH
BBB
JJ H
BB
H
BB
U-Tube
H H
H B
HBBH
H
Time
Abbildung 17.6: Die Messungen der hydraulische Schwingung im U-Rohr in
Abb.17.3, der elektrische Schwingung in Abb.17.4 und die Torsionsschwingung in
Abb.17.5 erlauben us, die Maxima der Ausschläge als Funktionen der Zeit zu bestimmen (Amplituden und Zeit wurden so transformiert, dass alle drei Ergebnisse
in das selbe Diagramm passen.) Bei den ersten beiden Beispielen klingen die Amplituden exponentiell ab, bei der Torsionsschwingung näherungsweise linear.
410
Schwingungen und Wellen
Im Diagramm in Abb.17.6 werden die absoluten Werte der Maxima und Minima
der gedämften Schwingung als Funktionen der Zeit aufgetragen. Damit alle drei
Beispiele ins selbe Diagramm passen, sind sowohl die Zeit- als auch die AmplitidenAchsen skaliert worden – tatsächliche Werte sieht man dort also nicht mehr, nur noch
die Verläufe. Und da ergibt sich ein wesentlicher Unterschied im Dämpfungsverhalten zwischen hydraulischer und elektrischer Schwingung einerseits und mechanischer
Schwingung andererseits. Man sieht, dass die Amplituden im ersten Fall fast perfekt
exponentiell abklingen, bei der Torsionsschwingung aber mehr oder weniger linear.
Das deutet darauf hin, dass man die Dämpfung in den drei Beispielen verschieden
modellieren muss.
17.1.3
Schwingung bei Translationsbewegung
Elastische Materialien, seien sie nun fest, flüssig, oder gasförmig, können schwingen.
Am einfachsten sieht man das, wenn man einen starren Körper an eine Feder hängt
und ihn dann auf und ab schwingen lässt. Luft kann genauso schwingen, was in der
Weiterführung dann zu Schallwellen führt (Abschnitt 17.1.8).
Bungee Jumper. Ein interessantes aber immer noch relativ einfaches System, das
Translationsschwingungen erlaubt, ist ein Bungee Jumper. In Abb.17.7 sind die
Beschleunigung und die Geschwindigkeit eines schweren Klotzes, der sich an einer
senkrechten Schiene bewegen kann, aufgezeichnet. Der Klotz ist an starken Gummiseilen oben an der Schiene befestigt. Man schiebt den Klotz nach oben und lässt
ih dann los. Darauf ergibt sich eine stark gedämpften Translationsbewegung.
Acceleration / m/s^2
Acceleration
10
2
0
0
Speed
-10
-2
Speed / m/s
4
20
-4
-20
0
2
4
Time / s
6
8
Abbildung 17.7: Ein schwerer Klotz fällt an einer Schiene geführt senkrecht nach
unten. Weil er an einem starken Gummiseil befestigt ist, schwingt er eine Weile auf
und ab. Im Diagramm sieht man die gemessene Beschleunigung des Klotztes.
17.1 Phänomene und Wortmodelle
411
Position / m
Luft als Feder: der Versuch von Rüchardt. Ein ganz ähnliches Schwingungsverhalten sieht man in einem berühmten Versuch von Rüchardt, der zu Untersuchung der
thermischen Eigenschaften von Luft herangezogen wird. Man befestigt ein langes
vertikales Glasrohr auf dem Hals einer grossen Flasche und lässt eine Stahlkugel
in das Rohr fallen. Die Kugel wird dann auf der Luftsäule auf und ab schwingen
(Abb.17.8).
1
0.5
Position
0
2
0
Speed
Speed
-2
0
1
2
3
Time / s
4
5
Abbildung 17.8: Eine Stahlkugel wird in ein senkrechtes Glasrohr, das auf den Hals
einer grossen Flasche gesteckt ist, fallen gelassen (Photographie links). Die Kugel
schwingt dann auf dem Luftpolster – die Luft in Rohr und Flasche wird rhytmisch
komprimiert. In einem Film wurde die Position der Kugel in Funktion der Zeit
aufgezeichnet. Durch die zeitlich beschränkte Auflösung der Kamera (25 Bilder pro
Sekunde) wird die Kugel im Bild in die Länge gezogen (Photographie rechts) – dies
wurde indirekt zur relativen Besitmmung der Geschwindigkeit herangezogen.
17.1.4
Wirtschaftszyklen
Aus dem Alltag wissen wir, dass die Wirtschaft alle Jahre schrumpft und wieder
wächst – wir sehen Schwankungen um eine über serh viel längere Zeit meist wachsende Wirtschaft (Abb.17.9). Diese Schwankungen haben nichts mit besonderen
Ereignissen oder gar Katastrophen zu tun – sie sind sozusagen in die Wirtschaft
eingebaut.
90
90
1968
85
0
80
-50
75
Utilization (%)
Utilization
50
Utilization (%)
∆Inventory / 10^9 US$
100
ÉÉÉÉ É É
É
ÉÉ
É É
É
É
É É
É É É
É
É
É É
1970 É ÉÉÉ É
É
É
ÉÉ É
É 1980
É
É É É
ÉÉ
É
ÉÉÉ
É
É É
É
É
É
É ÉÉ
É
É
É
1995 É 1990
É
É
1977 É ÉÉÉÉ
ÉÉ
É
É
É
É
É
É
1985
ÉÉÉÉ É É É
É É É
É
ÉÉ É É
É
ÉÉ
É
É
É
ÉÉ É É
É
É
É
É
É 1975
É
É
É
ÉÉ
É
É 1982
É
É
É
ÉÉ É
1973
85
80
∆Inventory
-100
1960
1970
1980
Time / a
1990
70
2000
75
-100
-50
0
50
100
Inventory Difference / 10^9 US$
Abbildung 17.9: Makroökonomische Zyklen am Beispiel der Beziehung zwischen
Auslastung (Utilization) und Lager (Difference of Inventory: Differenz des Wertes
der Lager im Vergleich zum langjährigen Trend von 1968 bis 1995) für die US Wirtschaft. Inventory: http://www.bea.gov/bea/dn/nipaweb/TableViewFixed.asp#Mid.
Utilization: http://www.economagic.com/em-cgi/data.exe/frbg17/B50001_utlsa.
412
Schwingungen und Wellen
17.1.5
Schwingungen in Räuber-Beute Systemen
X
60
X
80
X
X
X
Lynx
Hare
[
XX
[
[
X
[
[
[
X
[
[ X
40
X
X
X
[
[ [
X
[ XX[
X
X
X
20
XXX [X[
[
XX[ X [
[
[ XX[
[
[
[
[ X X[
[
[
[
[
XX X
0[
60
1900
1910
1920
Time / a
1930
Lynx furs / 1000
Number of furs / 1000
100
X
X
X
40 X
X X
X
X
X
Start
X Start
X
X
20 X
X
X
X X
X X
X X
XX
X
X
X XX
X
0
0
20
40
60
80
Hare furs / 100
100
Abbildung 17.10: Die Hudson-Bay Company hat über viele Jahrzehnte Buch
über die Zahl der abgelieferten Felle von kanasichen Luchsen und von Schneehasen geführt. Hier sieht man einen Ausschnitt der Zahlen von 1900 bis
1920. Siehe auch http://www-rohan.sdsu.edu/~jmahaffy/courses/f09/math636/lectures/lotka/qualde2.html.
17.1.6
Chemische Schwingungen
17.1.7
Resonanzerscheinungen
17.1.8
Wasserwellen und Schallwellen
17.1.9
Wellen in elektrischen RCL Ketten
17.1.10
Reaktions-Diffusions-Erscheinungen
Abbildung 17.11: Eine Abfolge von Bildern aus einem Film über die Ausbreitung von Wellenförmigen Mustern bei einer oszillierenden chemischen Reaktion (Belouzov-Zhabotinski
Reaktion) in einer flachen Schale. Hier beeinflussen sich räumliche und zeitliche Änderungen gegenseitig. Die Musterbildung im Fell von Tieren wird zum Beispiel so erklärt.
(rkraig, 200: http://www.youtube.com/watch?v=bH6bRt4XJcw)
17.2 Beschreibung einfacher Schwingungsformen
17.2
413
Beschreibung einfacher Schwingungsformen
Schwingungen bestehen darin, dass dynamische Grössen eines Systems bildlich gesprochen hin- und herschaukeln. Im aller einfachsten Fall von Schwingungen wiederholen sich Vorgänge deshalb in gleicher Form in festen Perioden—zum Beispiel
wie eine einfache Winkelfunktion (Sinus in Abb.17.12, links). Im Allgemeinen weichen Schwingungsvorgänge aber von diesem Fall ab: die Form des Verhaltens kann
von Periode zu Periode anders sein, die Amplitude kann sich ändern, und auch die
Perioden müssen nicht fest sein (einfaches Beispiel in Abb.17.12, rechts).
Ungedämpfte harmonische Schwingung
0.08
0.08
0.04
0.04
IQ / A
IQ / A
17.2.1
0
-0.04
0
-0.04
-0.08
-0.08
0
0.01
0.02
Time / s
0.03
0.04
0
0.01
0.02
Time / s
0.03
0.04
Abbildung 17.12: In diesen Diagrammen sind Simulationsergebnisse eines Modells
für den Stromkreis in Abb.17.4 gezeigt (Modell in Abb.17.19). Links: sogenannte ungedämpfte Schwingung mit RS = 0 Ω und IQ (0) = 0 A. Rechts: das selbe Modell für
vier verschiedene Werte des elektrischen Widerstandes der Spule (0, 0.77, 7.1, 65 Ω).
Die Simulation mit RS = 65 Ω zeigt einen Fall, wo die Dämpfung überkritisch ist:
es gibt gar keine Schwingung mehr.
Die ungedämpfte Schwingung, die der Form nach einer Sinus-Funktion entspricht,
kann durch drei oder vier Parameter verändert werden (Abb.17.13, links). Man kann
die Amplitude x̂ wählen, die Periode T anpassen, die Kurve horizontal verschieben
(zeitliche Phasenverschiebung φt ) und auch noch vertikal. Die dargestellte Funktion
kann man folgendermassen als analytische Funktion schreiben:
x (t) = x̂ sin
2π
(t − φt )
T
(17.1)
Diese Art Verhalten kommt bei ungedämpften linearen Schwingungssystemen vor.
Ungedämpft gibt es in Realität nicht, deshalb ist die gedämpfte lineare Schwingung
(Abb.17.13, rechts) ein wichtiger praktischer Fall. Dabei ändert sich die Amplitude
exponentiell abnehmend.
Zur Beschreibung von Schwingungen gehört noch der Begriff Frequenz. Dabei handelt es sich um den Kehrwert der Schwingungsperiode:
f = 1/T
(17.2)
414
Schwingungen und Wellen
2
2
T
Envelope
1
1
φt
x(t)
x(t)
x̂
0
0
-1
-1
T
-2
-2
-1
0
1
2
Time / s
3
4
-1
0
1
2
Time / s
3
4
Abbildung 17.13: In diesen Diagrammen sind Simulationsergebnisse eines Modells
für den Stromkreis in Abb.17.4 gezeigt (Modell in Abb.17.19). Links: sogenannte ungedämpfte Schwingung mit RS = 0 Ω und IQ (0) = 0 A. Rechts: das selbe Modell für
vier verschiedene Werte des elektrischen Widerstandes der Spule (0, 0.77, 7.1, 65 Ω).
Die Simulation mit RS = 65 Ω zeigt einen Fall, wo die Dämpfung überkritisch ist:
es gibt gar keine Schwingung mehr.
Aufgaben
17.2.2
Gedämpfte Schwingung
17.2.3
Darstellung in Phasendiagrammen
14. Wie gross ist die Amplitude der in Abb.17.12 links gezeigten Funktion?
15. Wie lang ist die Schwingungsperiode der in Abb.17.12 gezeigten Funktionen? Was
ist die Frequenz?
16. Schätzen Sie die zeitliche Phasenverschiebung der Funktion in Abb.17.17.
17. Bestimmen Sie graphisch so genau wie möglich die Funktionsgleichung der Ein-
hüllenden Kurve für die Maxima der Funktion in Abb.17.13 rechts. Bestimmen Sie
eine Funktionsgleichung für die in diesem Diagramm gezeigte schwingende Funktion.
17.3
Energie bei Schwingungen
Um die Rolle der Energie bei Schwingungen verstehen zu lernen, betrachten wir die
Schwingung einer Flüssigkeit in einem U-Rohr. Zuerst wollen wir zur Vereinfachung
annehmen, die Flüssigkeit könne ohne Reibung fliessen. Dann ergibt sich folgendes
Bild. Die Flüssigkeit steht am Anfang im einen Schenkel höher, im anderen tiefer
als das Gleichgewichtsniveau. Darum hat das hydraulische System mehr Energie gespeichert, als wenn die Flüssigkeit in Ruhe im Gleichgewicht wäre. Sowohl positive
als auch negative Abweichungen vom Gleichgewichtsniveau sind mit positiven Werten der Energie verbunden. Wir setzten die im Ruhezustand gespeicherte Energie
gleich null, also haben wir am Anfang der Schwingung eine bestimmte (positive)
Menge Ehyd,0 im hydraulischen Speicher.
Nun beginnt die Flüssigkeit zu fliessen, sie bewegt sich. Ein bewegter Körper hat
auch Energie, genau wie ein geladener oder ein heisser Körper. Da die Flüssigkeit
schneller wird, kriegt sie aus dem hydraulischen Speicher mehr und mehr Energie.
Diese Verschiebung dauert so lange, bis die Flüssigkeit am schnellsten ist, was genau
dann der Fall ist, wenn die Flüssigkeitsniveaus in der Gleichgewichtslage sind. Also
17.4 Induktion und Schwingungen
415
haben wir dann keine Energie mehr, Ehyd = 0 , dafür ist alle Energie in der bewegten
Flüssigkeit: Ebew,max = Ehyd,0 . Nun geht die Flüssigkeit im anderen Schenkel in die
Höhe, die Strömung wird langsamer, Energie geht aus dem “Bewegungsspeicher” in
den hydraulischen Speicher.
Wenn das System keine Energie verliert, was bei Reibung aber der Fall wäre, wiederholt sich das Spiel der Energie ständig. Während einer Viertel-Periode einer
Schwingung geht immer die ganze Menge Energie aus einem Speicher in den anderen; in der nächsten Viertel-Periode geht es wieder zurück. Durch Reibung geht
laufend ein Teil der gesamthaft im System vorhandenen Energie verloren, die Amplitude der Schwingung nimmt ab. An der Form der Prozesse ändert sich dabei aber
nichts.
H
H
Energy
M
H
M
H
M
M
H
M
Abbildung 17.14: Im Laufe einer Viertel-Periode einer ungedämpften (reibungsfreien) Schwingung geht die Energie gänzlich aus dem ersten Speicher (H) in den
zweiten (M), während der zweiten Viertel-Periode geht die Energie wieder aus M
nach H zurück (H: hydraulischer Speicher, M: Bewegungsspeicher). Hier ist eine
halbe Periode einer Schwingung dargestellt.
17.4
Induktion und Schwingungen
In Kapitel 5, Abschnitt 5.1.4 wurde schon darauf hingewiesen, dass die Trägheit von
Strömen wesentlich für das Phänomen von Schwingungen mit verantwortlich ist. In
diesem Abschnitt führen wir die Idee quantitativ aus: wir analysieren Daten von
einfachen Schwingungsvorgängen und zeigen, dass (verallgemeinerte) Spannungen
über induktiven Elementen mit der Änderungsrate der Ströme durch diese Elemente
zusammen hängen.
17.4.1
Schwingung in einem U-Rohr
Die Erklärung einer hydraulischen Schwingung wie beim U-Rohr ist relativ leicht
zu erhalten. Wir sogen dafür, dass die Flüssigkeit in einem der Schenkel höher steht
als im andern. Dann lassen wir die Flüssigkeit fliessen. Wir haben eine hydraulische Triebkraft (Druckdifferenz 4pC oder Gravitationspotential-Differenz zwischen
links und rechts), aber das Fluid fliesst (noch) nicht. Deshalb sagen wir, dass der
416
Schwingungen und Wellen
ganze Antrieb4pC im Moment nur dafür sorgt, dass das Fluid anfängt zu fliessen. In Analogie zu Gl.(5.6) erwarten wir, dass es zwischen der Druckdifferenz 4pL
für das induktive Phänomen und der Änderungsrate des Stromes einen direkten
Zusammenhang geben sollte:
dIV
∼ 4pL
(17.3)
dt
Level / mm
440
420
400
380
360
0
5
10
15
Time / s
20
Abbildung 17.15: Wenn man anstelle von zwei kommunizierenden Tanks mit dünnem
Verbindungsrohr ein U-Rohr verwendet, schaukelt die Flüssigkeit (Quecksilber) hin und her.
Im Diagramm rechts sieht man eine gedämpfte Schwingung: gemessen wurde die Füllhöhe
in einem der Schenkel des U-Rohrs als Funktion der Zeit.
Der Antrieb führt zu einer Änderung des Stromes. Sobald der Strom fliesst, passieren
zwei Dinge: (1) die kapazitive Druckdifferenz zwischen den Schenkeln wird niedriger
und (2) wegen der Reibung ist nun ein Teil der tatsächlichen Druckdifferenz mit
dem dissipativen Transport verbunden:
4pR = RV IV
(17.4)
Für die weitere Änderung der Volumenstromstärke steht nun nur noch eine kleiner
Druckdifferenz zur Verfügung:
4pL = 4pC − 4pR
(17.5)
Der Strom verstärkt sich weiter, aber nicht mehr so schnell. Die Flüssigkeit wird ihre
grösste Geschwindigkeit gerade dann erreichen, wenn die beiden Flüssigkeitsniveaus
links und rechts gleich geworden sind. Der hydraulische Antrieb ist weg, aber wir sind
nicht im Gleichgewicht. Wegen ihrer Trägheit fliesst die Flüssigkeit nun “bergauf”:
dort, wo das Niveau ursprünglich hoch war, geht es unter die Gleichgewichtslage,
auf der anderen Seite geht es nun darüber hinaus. Jetzt verlangsamt sich das Fluid
aber, bis es im zweiten Schenkel den Höchststand erreicht hat.
Dieser Höchststand wäre gleich wie am Anfang auf der anderen Seite, gäbe es nicht
die Reibung. Die führt dazu, dass Energie aus dem System verloren geht: der Vorgang des Hin- und Herschaukelns ist nicht symmetrisch. Langsam nehmen die Maxima und Minima der Niveaus ab, und die Amplitude der Schwingung nimmt ab,
wie wir in Abb.17.3 und 17.4 sehen.
Aufgaben
18. Wann ist bei der Schwingung im U-Rohr 4pR am grössten?
19. Wasser schwingt in einem U-Rohr. Zu einem bestimmten Zeitpunkt sind die Füllhö-
hen in den beiden Schenkeln zum ersten Mal gleich. Wie gross ist dann die kapazitive
Druckdifferenz zwischen den beiden Schenkeln? Heisst das, dass das Fluid dann nicht
fliesst?
17.4 Induktion und Schwingungen
417
20. Wenn man bei Schwingungen zwei zueinander gehörige Funktionen (wie Spannung
und Stromstärke beim elektrischen Schwingkreis oder Füllhöhe und Volumenstrom
beim U-Rohr) anschaut, sieht es aus, als ob eine davon ihr Maximum dann hat,
wenn sich die andere am schnellsten ändert. Stimmt diese Beobachtung genau? Hat
Dämpfung etwas mit dieser Frage zu tun?
17.4.2
Analyse des elektrischen Schwingkreises
R
L
B
A
C
D
E
C2
4
Voltage
3
2
0.06
Current
0
UC1
UC2
0
0.01
0.02 0.03
Time / s
0.04
-0.06
0.05
Electric current / A
Usol
Solenoid
C1
Voltage UC / V
In Abb.17.4 sehen wir die über den beiden Kondensatoren gemessenen Spannungen
als Funktionen der Zeit. Zudem kennen wir den Widerstandswert des Drahtes, aus
dem die Spule gemacht ist (7.0 Ω) und die Kapazitäten der beiden Kondensatoren
(60 µF und 95 µF). Mit diesen Angaben kann man nun Schritt für Schritt analysieren, welche Prozesse im Schwingkreis stattgefunden haben, und wie die Spule
zu charakterisieren ist—insbesondere werden wir die Induktionsbeziehung zwischen
Änderungsrate des Stromes und der induktiven Spannung für das konkrete Beispiel
herleiten können.
Abbildung 17.16: Eine Spule ohne Eisenkern zwischen zwei (verschieden) geladenen
Kondensatoren (C1 = 60 µF, C2 = 95 µF) führt zu einer Schwingung der elektrischen Grössen.
Der erste wichtige Schritt besteht darin, die elektrische Stromstärke aus den bisher erhobenen Daten zu bestimmen. Das geht hier, indem man die Änderungsrate
der Spannung eines der Kondensatoren (oder von beiden zusammen gemittelt) bestimmt. Die Spannung eines Kondensators ist über die Kapazität mit seiner Ladung
verbunden, die Änderungsrate der Ladung muss laut Bilanz gleich der Stromstärke
sein:
Q̇ = C U̇C
(17.6)
Q̇ = ±IQ
(17.7)
Die Daten für die Spannungen liegen als Vektor vor, also kann man die Änderungsrate durch numerische Differentiation (Differenzenquotient) und anschliessende Glättung gewinnen. Das Resultat ist in Abb.17.17 im linken Diagramm dargestellt. Offensichtlich schwingt die Ladung hin und her, wobei die Schwingung wegen
der Widerstandswirkung des Spulendrahtes gedämpft ist. Aus diesem Resultat ergibt sich nun direkt die Spannung URS , die man wegen der Widerstandswirkung des
Drahtes erwarten sollte:
URS = RS IQ
(17.8)
Das Resultat muss genau die gleiche Form wie IQ (t) haben: es ist im Diagramm
rechts in Abb.17.17 zu sehen.
418
Schwingungen und Wellen
Es ist wichtig, sich daran zu erinnern, dass URS nicht in dem einfachen Sinn wie
die Spannung über der Spule existiert. Die Spannung über der Spule kann man
messen. Sie ist übrigens laut Schaltungsdiagramm in Abb.17.4 gleich der Differenz
der beiden gemessenen Spannungen über den Kondensatoren:
(17.9)
Usol = UC1 − UC2
URS stellt einen Teil von Usol dar, da die Spule noch einen anderen Vorgang durchmacht: den der Induktion. Die Induktionsspannung UL ist dann einfach das, was
noch übrig bleibt:
UL = Usol − URS
(17.10)
0.04
0.3
URS / V
0.6
IQ / A
0.08
0
-0.04
0
-0.3
-0.08
-0.6
0
0.01
0.02 0.03
Time / s
0.04
0.05
0
0.01
0.02 0.03
Time / s
0.04
0.05
Abbildung 17.17: Stromstärke in der Schaltung von Abb.17.4 (links) und resistive
Spannung über dem Draht der Spule (rechts).
Diese Spannung ist in Abb.17.18 links als Funktion der Zeit dargestellt; sie ist eine
gedämpfte Schwingung wie die vorhergehenden Funktionen. Da wir erwarten, dass
diese induktive Spannung mit der Änderungsrate des Stromes verknüpft sein sollte,
bestimmen wir dIQ /dt numerisch im Datenblatt und erhalten die zweite Datenreihe,
die in Abb.17.18 links durch Punkte dargestellt ist. Bei geeigneter Streckung der
Werte sind die beiden Funktionen fast deckungsgleich.
0
-0.5
-1
-1.5
60
40
dIQ/dt / A/s
URS / V
1
0.5
45
UL
[
[
[
[
[
[
[ dIQ/dt
[[ [
[
[
[
[
[
[[ [
[
[
[
[
[[
[[
[
[
[
[
[
[
[ [[ [
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[ 0
[
[[
[
[
[
[
[
[
[
[
[
[
[
[
[[
[
[
[
[
[
[
[
[
[
[[ [
[
[
[
[
[
[
[
[
[
[ [
[
[
[ [
[ [
[
[[ [
[
[
[
[
[
[
[
[[ [
[
[
[
[[ [
[[
[
[
-45
[
[
0
0.01 0.02 0.03 0.04 0.05
Time / s
dIQ/dt / A/s
1.5
[
[
[
[[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
20
0
-20
[
[
[
[
[
[
[
[
-40
-60
-2
-1
0
UL / V
1
2
Abbildung 17.18: Induktive Spannung und Änderungsrate des Stromes als Funktionen der Zeit (links) sind fast deckungsgleich. Im charakteristischen Diagramm
(dIQ /dt als Funktion von UL ) sieht man, dass die induktive Spannung und die Änderungsrate des Stromes fast perfekt proportional zueinander sind.
Diesen Sachverhalt kann man noch besser untersuchen, wenn man dIQ /dt in einem
Diagramm gegen UL aufträgt (Abb.17.18, rechts). Dieses Diagramm heisst charak-
17.4 Induktion und Schwingungen
419
teristisches Diagramm der induktiven Beziehung und zeigt, dass
dIQ
1
= UL
dt
L
(17.11)
mit konstantem Faktor L ist. Dieser Faktor misst so etwas wie die Trägheitswirkung der Spule im Stromkreis. Ist L grösser, so ändert sich für gegebenes UL die
Stromstärke langsamer: der Stromkreis ist träger. Man sieht, dass L der Kehrwert
der Steigung der charakteristischen Geraden im Diagramm Abb.17.18 (rechts) ist.
Numerisch erhalten wir hier L = 0.035 H. H (Henry) ist die Standardeinheit der
Grösse, die offiziell Induktivität der Spule heisst.
Induktion
Transporte (Volumen in der Hydraulik, elektrische Ladung in der Elektrizität,
Impuls und Drehimpuls bei Translations- und Rotationsbewegungen, Entropie bei
thermischen Vorgängen) unterliegen einer Art “Trägheit”: der Strom ändert sich
nicht einfach so, sondern seine Änderung ist mit einer zugehörigen Potentialdifferenz verbunden:
dI
(17.12)
4ϕL = −L
dt
Man nennt das Phänomen Induktion und die zugehörige Potentialdifferenz induktive Potentialdifferenz. L nennt man die Induktivität eines Elementes; sie misst die
Trägheit des Phänomens. Das Minuszeichen bedeutet, dass ein in Stromrichtung
abnehmendes Potential zu einer Verstärkung des Stromes führt.
17.4.3
Torsionsschwingung eines Rades
Konzepte
420
17.5
Schwingungen und Wellen
Dynamische Modelle und Simulationen
In diesem Abschnitt werden ein paar dynamische Modelle für Beispiele aufgebaut,
die wir vorher diskutiert haben. Damit sollten wir ein vertieftes Verständnis der
Zusammenhänge—der Grundideen—und des konkreten Verhaltens von Systemen,
speziell von schwingungsfähigen, erhalten. Im folgenden Abschnitt wollen wir durch
Simulation ein wichtiges Phänomen untersuchen, nämlich das der Resonanz.
17.5.1
Modell der Schwingung in einem U-Rohr
17.5.2
Modell eines elektrischen Schwingkreises
In Abb.17.4 ist ein elektrischer Schwingreis mit zugehörigen Daten aus einem Experiment dargestellt. Dieses System zu modellieren ist nun nicht mehr schwierig.
Wir wissen, wie man die induktive Wirkung einer Spule darstellt. Was wir dazu
brauchen, ist die Bestimmung der induktiven Spannung. Wir sehen im Schaltungsdiagramm von Abb.17.4, dass diese sich aus dem Maschensatz ergibt, wenn es uns
gelingt, die anderen drei Spannungen zu bestimmen.
Die Spannung über der Spule können wir durch die Differenz der Spannungen über
den beiden Kondensatoren bestimmen. Aus Usol folgt dann UL , indem man URS =
RS IQ subtrahiert. Der wesentliche neue Aspekt des Modells ist also die Berechnung
der Spannungen der Kondensatoren. Das bedeutet, dass man den Teil des Modells
von zwei kommunizierenden Kondensatoren hinzufügt, den wir schon aus Kapitel
4.2.1 kennen—die Bilanz der elektrischen Ladung für die beiden Speicher und die
Berechnung ihrer Spannungen aus der Ladung und den zugehörigen Kapazitäten.
Das so entstehende gesamte Modell ist in Abb.17.19 links dargestellt.
0.08
[
[
[
IQ / A
0.04
[
[
[
[
[[
[
[
[
[
[
[
[
[
[ [ [
[
[ [
[
[
[
[ [
[
[[
[
[ [
[
[
[
[
[
[
[
[
[
[ [ [[
[
[
[
[
[
[
[[
[
[
[
[
0
-0.04
-0.08
0
0.01
0.02
0.03 t / s
Abbildung 17.19: Diagramm eines dynamischen Modells des elektrischen Schwingkreises auf Abb.17.4 (links). Rechts sehen wir den Vergleich einer Simulation des
Modells für die Stromstärke im Vergleich mit der aus den Daten direkt berechneten
Stromstärke (Abb.17.19 links).
Die Logik des Modells geht etwa so: Die Ladung der beiden Kondensatoren bestimmt
ihre Spannungen, diese bestimmen die Spannung über der Spule. Mit der Stromstärke, die den Transport der Ladung von Kondensator zu Kondensator bestimmt,
erhält man die resistive Spannung der Spule und zusammen mit den Spannungen über der Spule die induktive Spannung. Diese führt auf die Änderungsrate der
Stromstärke, die man integriert, um die Stromstärke zu erhalten. Diese führt auf die
Änderung der gespeicherten Ladung und damit auf die Ladung der Kondensatoren,
17.5 Dynamische Modelle und Simulationen
421
worauf das Spiel von vorne beginnt. Eine Simulation des Modells zeigt eine sehr
gute Übereinstimmung mit den Daten für die elektrische Stromstärke (Abb.17.19
rechts).
Die Werte für die Parameter, die einer guten Anpassung an die Daten entsprechen,
sind nahe an den vorgegebenen Werten. Die Simulation wurde mit Kapazitäten von
55 µF und 94 µF durchgeführt. Der Wert des Widerstandes des Drahtes, aus dem
die Spule gemacht ist, beträgt 7.02 Ω . Die Induktivität wurde aus der Analyse in
Abb.17.18 übernommen. Wenn man dann noch einen Wert für den anfänglichen
elektrischen Strom von 4.03·10−2 A nimmt, erhält man das gezeigte Resultat.
21. Woran sieht man in den Daten in Abb.17.4, dass die beiden Kondensatoren nicht
die gleiche Kapazität haben? Welcher Kondensator hat die grössere Kapazität?
22. Welche Eigenschaften werden gebraucht, dass es zu Schwingungen kommt? (Widerstand? Kapazität? Induktivität?)
23. Was für Veränderungen in den gemessenen Daten in Abb.17.4 erwarten Sie, wenn
Sie (a) die Kapazität beider Kondensatoren vergrössern, (b) den Widerstandswert
des Spulendrahtes vergrössern, (c) eine Spule mit grösserer Induktivität nehmen?
24. Warum sehen die beiden Kurven in Abb.17.17 gleich aus?
25. Zeichnen Sie von Hand so genau wie möglich ein Diagramm, das alle vier Spannungen
entsprechend dem Schaltungsdiagramm in Abb.17.4 als Funktionen der Zeit enthält.
Überzeugen Sie sich über die Zusammenhänge zwischen diesen Grössen.
26. Bestimmen Sie graphisch so genau wie möglich die Änderungsrate der elektrischen
Stromstärke aus dem linken Diagramm in Abb.17.17. Vergleichen Sie das Resultat
mit dem linken Diagramm in Abb.17.18.
27. Warum können wir im Experiment von Abb.17.4 schliessen, dass die Induktivität
der Spule einen konstanten Wert hat?
28. Wie gross ist die gesamte Kapazität der beiden Kondensatoren im Stromkreis für
das Modell in Abb.17.19?
29. Formulieren Sie alle Gleichungen für das in Abb.17.19 dargestellte Modell eines
Schwingkreises.
30. Wie sieht das Modelldiagramm für die hydraulische Schwingung einer Flüssigkeit in
einem U-Rohr aus? Formulieren Sie die Gleichungen für den Fall, dass die Strömung
immer laminar ist.
17.5.3
Simulationen des Modells für den Schwingkreis
Modelle kreieren ist das Eine, sie als virtuelle Labors für Untersuchungen verwenden
das Andere. Wir wollen nun das eben erstellte Modell verwenden, um auf experimentelle Art zu erfahren, wie die Schwingungsperiode vom System (seiner Grösse, d.h.
seinen Parametern) abhängt. Ein Beispiel einer Simulation mit Parametervariation
ist in Abb.17.20 dargestellt.
Das hier untersuchte Modell entspricht im Wesentlichen dem vorher aufgebauten,
enthält aber nur einen einzigen Kondensator. Zuerst überlegen wir uns, was die
Paramter des Systems sind. Zu den Anfangswerten für Spannung über dem Kondensator und Stromstärke kommen Widerstand, Kapazität und Induktivität. Wenn
man bei Simulationen die Anfangswerte einzel oder zusammen änert und alle anderen Grössen bestehen lässt, so bleibt die Schwingungsperiode unverändert—sie
Aufgaben
422
Schwingungen und Wellen
hängt also nicht von diesen beiden Werten ab. Auch der Widerstand scheint auf
den ersten Blick keinen Einfluss zu haben. Das Diagramm rechts in Abb.17.12 zeigt
keine (sichtbare) Änderung für die ersten drei Werte des Widerstandes (0, 0.77, 7.1
Ohm). Der letzte Wert (65 Ohm) zeigt allerdings, dass etwas drastisch passiert sein
muss: es gibt keine Schwingung mehr, die Periode ist quasi unendlich lang geworden.
Tatsächlich ändert die Periode merklich, wenn man den Widerstand in die Nähe des
kritischen Wertes (hier etwa 63 Ohm) bringt.
5
URS
2.5
UC
UC / V
RS
C
0
-2.5
L
UL
-5
0
2
4
t/s
6
8
Abbildung 17.20: Modell eines elektrischen Schwingkreises mit einem einzelnen
Kondensator und einer Spule (links). Das Diagramm rechts zeigt drei Simulationsergebnisse für UC,init = 4, IQ,init = 0, RS = 0, L = 1 und verschiedenen Kapazitäten
C = {0.25, 1, 4}.
Im Folgenden wollen wir den Einfluss des Widerstandes auf die Schwingungsperiode
ausser Acht lassen, was für nicht zu starke Dämpfung offensichtlich gerechtfertigt
ist. Dann kann die Periode nur noch von der Kapazität und der Induktivität von
Kondensator und Spule abhängen. Diese Abhängigkeit soll nun bei einem Schwingkreis mit R = 0 untersucht werden. Einige Ergebnisse für verschiedene Werte von
C und L sind in Tabelle 17.1 aufgeführt.
Tabelle 17.1: Schwingungsperiode in Abhängigkeit von C und L
C/L
0.25
0.50
0.25
2.0
4.0
2.0
4.0
3.142
0.50
1.0
1.0
3.142
3.142
4.443
6.283
4.443
6.283
8.886
6.283
8.886
12.57
12.57
12.57
Man sieht schon im Diagramm rechts in Abb.17.20, dass sich die Schwingungsperiode
verdoppelt, wenn man die Kapazität vervierfacht; das selbe Ergebnis sehen wir
in der Tabelle 10.1, wenn wir die mittlere Zeile betrachten. Offensichtlich ist die
Schwingungsperiode proportional zur Wurzel aus der Kapazität:
√
T ∼ C
Die Ergebnisse in der Tabelle zeigen auch, dass die Wirkung von Änderungen der
Induktivität gleich wie bei Änderungen der Kapazität ist; also ist
√
T ∼ L
17.5 Dynamische Modelle und Simulationen
423
Wenn man die beiden Beobachtungen kombiniert, so ergibt sich
√
T ∼ CL
(17.13)
(ist eine Grösse proportional zu zwei anderen, so ist sie auch proportional zu deren
Produkt). Dieses Ergebnis hätten wir auch auf anderem Weg vermuten können. Die
Periode ist von L und C abhängig, und sie wird länger, wenn eine oder beide der
Grössen grösser werden (das folgt wohl schon aus der Anschauung). Da ein RCLSystem (ein System mit Elementen mit R, C und L) von zwei Zeitkonstanten (der
kapazitiven und der induktiven) beeinflusst wird, wäre deren Produkt vielleicht ein
Mass für das Quadrat einer Zeitdauer, also der Periode:
T 2 ∼ τC τL = R C
L
=CL
R
Das sind natürlich alles keine Beweise. Auch die Konstruktion mit Hilfe von Einheiten, die auf die selbe Form führt, ist kein Beweis. Immerhin haben wir nun sehr
starke Hinweise, dass die Periode der Schwingung eines ungedämpften Schwingkreises proportional zur Wurzel aus dem Produkt von Kapazität und Induktivität sein
sollte. Was ist aber die endgültige Form der Beziehung? Was ist der Proportionalitätsfaktor in Gl.(17.13)? Hier gibt die Tabelle der Simulationsergebnisse Auskunft.
Wenn sowohl die Kapazität als auch die Induktivität einen Wert von 1 haben, ist
die Schwingungsdauer nahe bei 2π. Also vermuten wir, dass
√
(17.14)
T = 2π C L
Das stimmt tatsächlich, was man beweisen kann, wenn man das Anfangswertproblems des Schwingkreises analytisch löst. Wir werden das an anderer Stelle (Kapitel
15) tun.
31. Die Schaltung in Abb.17.20 mit nur einem Kondensator lässt Schwingungen zu (auch
in Realität, nicht nur im Modell). Wenn man aber ein hydraulisches System mit nur
einem Tank (und einem Rohr) baut, so kommt es nie zu einer Schwingung. Warum
nicht? Was ist der Unterschied der beiden Systeme?
32. Wie lang müsste laut den Ergebnissen in Tabelle 10.1 die Schwingungsperiode für
C = 0.25 und L = 2 sein? Stimmt das mit einer Berechnung nach Gl.(17.14) überein?
33. Bestimmen Sie für den Stromkreis aus Beispiel Abb.17.4 die Kapazität des Systems
(Sie müssen die beiden Kondensatoren als in Serie geschaltet betrachten). Messen
Sie dann aus den Daten die Periode der Schwingung und benutzen Sie das, um die
Induktivität der Spule zu bestimmen. Stimmt das mit dem Ergebnis der Analyse in
Abb.17.18 überein?
34. Wie gross ist die gesamte Kapazität der beiden Kondensatoren im Stromkreis für
das Modell in Abb.17.19?
35. Formulieren Sie alle Gleichungen für das in Abb.17.19 dargestellte Modell eines
Schwingkreises.
36. Wie sieht das Modelldiagramm für die hydraulische Schwingung einer Flüssigkeit in
einem U-Rohr aus? Formulieren Sie die Gleichungen für den Fall, dass die Strömung
immer laminar ist.
17.5.4
...
Der Rüchardt-Versuch
Aufgaben
424
Schwingungen und Wellen
17.5.5
Resonanz in einem schwingenden System
Resonanz ist ein im Alltag gut bekanntes Phänomen. Wenn man zum Beispiel will,
dass der kleine Bruder auf der Schaukel möglichst hoch schwingt, muss man ihn
im gleichen Rhythmus (mit der gleichen Frequenz) anstossen, mit der er von selbst
auf natürliche Weise hin und her schwingt. Diese Frequenz nennt man natürliche
Frequenz oder Eigenfrequenz des schwingenden Systems. Wenn man ihn mit einer
anderen Frequenz schiebt, so verringert sich die Amplitude (Auslenkung), mit der
er schliesslich schwingt. Das System spricht also auf eine Anregung am besten an,
wenn diese die gleiche wie die Eigenfrequenz hat.
Bemerkung: Ein reales System kann man sich aus Teilen zusammengesetzt denken,
die alle ein einfaches schwingendes System mit einer eigenen Eigenfrequenz darstellen. So ein System hat mehrere bis sehr viele Eigenfrequenzen, kann also auf
verschiedene Anregungen ansprechen.
Ein Modell für einen einfachen Schwingkreis, den man anregen kann, ist schnell
aufgebaut. Im Fall eines elektrischen Schwingkreises nehmen wir das Modell aus
Abb.17.20 und fügen einfach einen Generator (Spannungsquelle) hinzu (Abb.17.21,
a und b).
a.
b.
C
IQ
URS
RS
UC
^
US
UL
L
Usol
Solenoid
US
c.
d.
0.6
2
0.3
1
IQ / A
UC / V , IQ / A
UC
0
0
-0.3
-1
-0.6
-2
0
50
100
Time / s
150
-2
-1
0
UC / V
1
2
Abbildung 17.21: (a) Schaltkreis eines angetriebenen Schwingers. (b) Modelldiagramm, von Abb.17.20 abgewandelt. (c) Simulation des Modells mit UC (t) und
IQ (t). (d) Phasenplot der selben Simulation, wobei IQ als Funktion von UC dargestellt wurde. Im Phasenplot sieht man besonders einfach den Einschwingvorgang
und die spätere stationäre (eingeschwungene) Phase, während der sich das System
immer wiederkehrend auf der selben geschlossenen Kurve bewegt.
Wenn man nun die Spannung des Generators sinusförmig macht, so spricht man von
einer harmonischen Anregung des Schwingkreises. Das heisst, man macht US (t) in
17.5 Dynamische Modelle und Simulationen
425
der Schaltung zum Beispiel eine Sinusfunktion mit einer bestimmten Amplitude ÛS
und einer Frequenz f :
US (t) = ÛS sin (2π f t)
(17.15)
Die Frequenz ist der Kehrwert der Periode, siehe Gl.(17.2). Es ist üblich, den Faktor
2π f im Argument der Funktion abzukürzen:
2π
Ω = 2π f =
(17.16)
T
Man nennt diese Grösse Kreisfrequenz, um sie von der Frequenz zu unterscheiden. Eine Kreisfrequenz von 2π 1/s bedeutet, dass man in einer Sekunde eine volle Schwingung beschreibt, oder dass die harmonische Funktion in Gl.(17.15) einmal den vollen
Kreis beschreibt. Mit der Kreisfrequenz wird Gl.(17.15) zu
(17.17)
US (t) = ÛS sin (Ω t)
Das Modell in Abb.17.21b wird um diesen Ausdruck ergänzt, und die Spannung
über der Spule ändert sich entsprechend:
(17.18)
Usol = UC + US
Steady state amplitude
of current (IQ / A)
Man interessiert sich nun dafür, wie das einfache schwingende System auf die harmonische Anregung reagiert. Dazu ändert man—bei vorgegebenen Werten für die
Parameter R, C, L—die Kreisfrequenz der treibenden Spannung US und misst die
Auslenkung (Amplitude) im eingeschwungenen Zustand, zum Beispiel für die Stromstärke. Experimente oder Simulationen zeigen, dass das System dann am stärksten
reagiert, wenn die Kreisfrequenz in Gl.(17.17) der Eigenfrequenz Ω0 des Schwingkreises entspricht. Wenn wir das Ergebnis in Gl.(17.14) benutzen, erhält man für
die Eigenfrequenz
1
(17.19)
Ω0 = √
LC
Für die Ergebnisse in Abb.17.22, die durch Simulationen des Modells in Abb.17.15b
erhalten wurden, ist Ω0 = 1.0 1/s.
6
RS = 1/6 Ω
4
RS = 2/6 Ω
2
RS = 2/3 Ω
0
0
0.5
1
1.5
2
Angular frequency / 1/s
2.5
Abbildung 17.22: Resonanzkurven für den Schwingkreis in Abb.17.21, der harmonisch angetrieben wird (C = 1.0 F, L = 1.0 H). Für verschieden grosse Widerstandswerte (und ÛS = 1.0 V) ergeben sich verschiedene Kurven. Diese zeigen an,
wie stark das System im eingeschwungenen Zustand schwingt (Amplitude des elektrischen Stromes als Funktion der Anregungsfrequenz).
Man sieht den Resonanzkurven in Abb.17.22 an, dass das System bei Ω = Ω0 am
stärksten reagiert. Je mehr sich die Frequenz der Anregung von der Eigenfrequenz
des Schwingkreises unterscheidet, um so geringer ist die Amplitude der Schwingung
im eingeschwungenen Zustand.
426
Schwingungen und Wellen
17.5.6
Ketten von Kondensatoren und Induktoren
17.5.7
Schallwellen
17.6
Quellen
Konzepte und Beziehungen
Induction and Oscillation
Lecture notes and books
· Fuchs H. U. (2010): The Dynamics of Heat. Springer, New York, Chapter
1.6.
· Fuchs H. U. (1995): Inductive Phenomena and Oscillations. Chapter 3 of
Lecture Notes FEHM.
· Hydraulic ram. http://en.wikipedia.org/wiki/Hydraulic_ram.
17.6 Konzepte und Beziehungen
Aufgaben
37. . . .
38. . . .
39. . . .
427
428
Schwingungen und Wellen