5) Impuls und Energie
Werbung
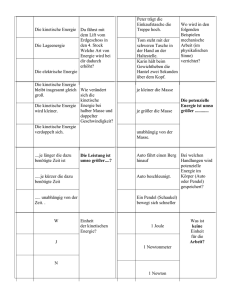
 Impuls und Energie")
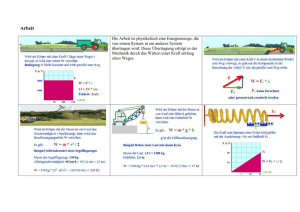
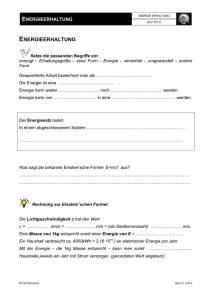
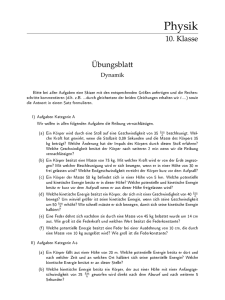
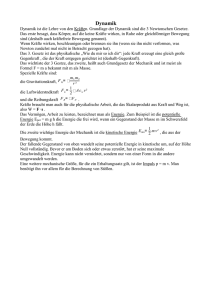
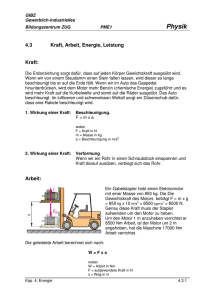
5) Impuls und Energie 5.1) Arbeit und Energie 5.2) Energieerhaltung 5.3) Impuls und Impulserhaltung 5.4) Stöße 5.1) Arbeit und Energie 5.1.1) Arbeit 5.1.2) Arbeit bei konservativen Kräften 5.1.3) Zusammenhang Potential – potentielle Energie 5.1.4) Leistung 5.1.1) Arbeit Definition von Arbeit: x1 x1 x0 x0 W = ∫ dW = - ∫ F(x) ⋅ dx Spezialfälle (F = const): Zugkraft y Kraft F ist parallel zum Weg x ( F x ) W = - F⋅x F = -mg ay = -g Kraft F (= Schwerkraft) parallel zur Bewegungsrichtung y es kostet Arbeit, Wagen nach oben zu ziehen Kraft F (= Schwerkraft) senkrecht zur Bewegungsrichtung x Kraft F ist senkrecht zum Weg x ( F ⊥ x ) es kostet KEINE W=0 Arbeit, Wagen nach F = -mg x ax = 0 rechts zu ziehen (Reibung keine Zugkraft nötig vernachlässigen) 5.1.1) Arbeit Arbeit W = Integral aus Produkt von Kraft und Weg, wenn ein Körper vom Ort x0 = (x0, y0, z0) zum Ort x1 = (x1, y1, z1) entlang eines Weges unter Aufwendung der ortsabhängigen Kraft F(x) bewegt wird. x dx x dx F(x) x1 F(x) dW = -F(x)⋅dx x0 Arbeit die bei zurücklegen des Wegstückchens dx geleistet wurde Arbeit ist Skalar mit Einheit Joule: 1 J = 1 N⋅m 5.1.1) Arbeit z x F F dx α Weg dx α r Weg 5.1.1) Arbeit Fx x F = , x = z Fz Arbeit hängt von der Richtung des Weges und der Kraft ab! Beispiel: Gewicht der Masse m soll bewegt werden auf das Gewicht wirkt die Gewichtskraft FG = m⋅g in negative x-Richtung. Diese Kraft hängt nicht (!) vom Ort ab. Fall 1: Gewicht wird auf einem Weg senkrecht zum Boden bewegt (Wir wissen, dass Gewichtskraft entgegen Bewegungsrichtung wirkt; wenn man Körper frei lassen würde, würde er im freien Fall zu Boden fallen) z z Skalarprodukt zwischen zwei Vektoren 1 x1 W=- F parallel dx z0 x0 dz x0 Fz = -mg x0 ∫ x x1 F( x ) ⋅ dx = − =- x1 ∫ x0 x0 z1 Fx ( x ) dx ⋅ = - Fx ( x ) ⋅ dx − Fz ( x ) ⋅ dz Fz ( x ) dz x0 Fx (x) = 0, Fz (x) = - mg z1 ∫ 0 ⋅ dx - ∫ (− mg)⋅ dz x0 ∫ z0 ∫ z0 z1 ∫ = mg dz = mg(z1 - z 0 ) = m ⋅ g ⋅ ∆z z0 5.1.1) Arbeit x1 W = - ∫ F(x) ⋅ dx = m ⋅ g ⋅ Δz x0 Arbeit um ein Gewicht mit Masse m um Höhe ∆z = h zu heben: W=mgh F parallel dx z0 dz Fz = -mg x0 x x1 5.1.1) Arbeit Fall 2: Gewicht wird auf Weg parallel zum Boden bewegt (Vernachlässigung der Reibung) Skalarprodukt zwischen zwei Vektoren x1 z W=- z1 z0 ∫ F( x ) ⋅ dx = − x0 F und dx stehen senkrecht aufeinander dx x1 =- ∫ x0 z0 x1 Fx ( x ) dx ⋅ = - Fx ( x ) ⋅ dx − Fz ( x ) ⋅ dz Fz ( x ) dz ∫ x0 Fx (x) = 0, Fz (x) = - mg z0 ∫ 0 ⋅ dx - ∫ (− mg)⋅ dz x0 z0 x x1 ∫ z0 z0 ∫ = mg dz = mg(z0 - z 0 ) = m ⋅ g ⋅ 0 = 0 z0 F hängt hier nicht vom Ort x ab Fz = -mg x0 x1 F ⊥dx es folgt direkt: W = 0 (Skalarprodukt zweier senkrechter Vektoren ist Null) Arbeit um ein Gewicht mit Masse m um Strecke ∆x zu verschieben: W = 0 Arbeit findet nur statt, wenn Kraft parallel zum Weg zeigt (bzw. Kraft muss in Komponente parallel und senkrecht zum Weg zerlegt werden) 5.1.1) Arbeit Fall 3: Gewicht wird auf schiefer Ebene hochgezogen (Vernachlässigung der Reibung) z z1 x1 x1 x1 z1 W=- x0 r z0 ∫ r: Koordinate in Bewegungsrichtung dx dx = cos(α)⋅dr α dz dz = sin(α)⋅dr dx F = -mg dx = dr z x F( x ) ⋅ dx = − ∫ x0 Fx ( x ) dx ⋅ = Fz ( x ) dz r1 ∫ = - Fx ( x ) ⋅ cos (α) ⋅ dr − r0 = - 0 ⋅ cos (α) ⋅ dr − r0 ∫ ∫ Fz ( x ) ⋅ dz z0 x0 Fz ( x ) ⋅ sin (α) ⋅ dr r0 Fx (x) = 0, Fz (x) = - mg r1 ∫ r1 ∫ Fx ( x ) ⋅ dx − r1 ∫ (− mg)⋅ sin (α) ⋅ dr r0 = mg ⋅ sin (α)(r1 − r0 ) = mg ⋅ sin (α) ⋅ ∆r r1 ∫ = mg ⋅ sin (α) dr r0 x0 x1 Wird Gewicht der Masse m auf schiefer Ebene mit Neigungswinkel α um Strecke ∆r entlang Ebene bewegt, so ist geleistete Arbeit W = mg⋅sin(α)⋅∆r ∆r = ∆z / sin(α) W = mg ∆z für Arbeit ist nur parallel zur Kraft zurückgelegter Weganteil entscheidend Versuch: Heben eines Gewichtes parallel zur Schwerkraft kostet Arbeit Schieben eines Gewichtes senkrecht zur Schwerkraft kostet keine Arbeit (unter Vernachlässigung der Reibung) 5.1.1) Arbeit Beispiel: Hand die Masse nach oben bewegt (Hand hält Masse fest) x FH 0 F‘H m FG Massepunkt m wird senkrecht zur Erdoberfläche (x-Koordinate) bewegt. Auf die Masse m wirken dabei 2 Kräfte: FH = Kraft die Hand auf Masse ausübt, damit diese bewegt wird FG = Gewichtskraft der Masse FG = - mg x = Auslenkung der Masse = Auslenkung der Hand xH F‘H = -FH = Kraft, die Masse auf Hand ausübt (actio = reaction) x(t) = xH(t) = = v0⋅t ; 5.1.1) Arbeit FH(t) = m⋅g = const; FH(x) = m⋅g = const; 5.1.1) Arbeit Beispiel: Hand die Hammer auf Erde hin und her schüttelt (vgl. clicker-Aufgabe Kap 3.2.2) x 0 FH m FG Massepunkt m (Hammer) wird senkrecht zur Erdoberfläche (xKoordinate) hin- und her-bewegt. FH = Kraft die Hand auf Hammer ausübt, damit dieser hin- und herbewegt wird FG = Gewichtskraft des Hammers FG = - mg Erde: g ≈ 9,81 N/kg; Spacestation g = 0 x = Auslenkung des Hammers FH‘ = -FH = Kraft die Hammer auf Hand ausübt x(t) = xH(t) = sin(ωt); 5.1.1) Arbeit FH(t) = m⋅g -m⋅ω2⋅sin(ωt); FH(t) x(t) +1 0 -1 FH(x) = m⋅g -m⋅ω2⋅x; FH(x) mg+mω2 0 π 2π ωt mg mg-mω2 mg+mω2 ωt 0 π 2π mg mg-mω2 -1 0 +1 x 5.1.1) Arbeit y0 = 0 ϕ -y > 0 l(y) Fy1,2 F1 Fx1 Fx2 Fy = +2⋅k⋅sin(ϕ)⋅∆l(y) 5.1.1) Arbeit „+“ rücktreibende Kraft entgegen der Auslenkungsrichtung (aufgrund des hier gewählten Koordinatensystems) „2“ 2 Federn „k“ Federkonstante „sin(ϕ)“ Es interessiert nicht Kraft parallel zur Feder, sondern in Richtung der y-Richtung „∆l“ Hookesches Gesetz: Kraft proportional zur Auslenkung y0 = 0 ϕ l(y) -y > 0 Vorzeichen richtig! Kraft entgegen der Auslenkung 5.1.1) Arbeit Arbeit bei Weg von einem Ort zum anderen hängt im Allgemeinen vom gewählten Weg ab Beispiel: es wirke fiktive Kraft F immer parallel zum Weg (z.B. Reibungskraft). Dann wäre Arbeit W proportional zum zurückgelegten Weg r. Zwischen zwei Punkten sind aber viele verschiedene Wege möglich, d.h. für jeden der gewählten Wege mit Länge r würde eine andere Arbeit benötigt werden: Es gelte für eine fiktive Reibungskraft : F(x) dx und F(x) = F = const. Dann gilt : x1 x1 x1 x1 W = - ∫ F(x) ⋅ dx = - ∫ F(x) ⋅ dx = - ∫ F ⋅ dx = - ∫ F ⋅ dr = − Fr x0 x 0 2 2 dx = dx + dz = dr Weg 1 dr dx x0 dz x0 x0 x dx F(x) x1 Weg 2 Weg 3 Länge r von Weg 2 ist kürzer als Länge r von Weg 1, d.h. geleistete Arbeit beim Weg von Punkt x0 nach Punkt x1 ist bei Weg 2 kleiner als bei Weg 1 5.1.1) Arbeit 5.1.2) Arbeit bei konservativen Kräften (entnommen aus: http://de.wikipedia.org/wiki/Konservative_Kraft) 5.1.2) Arbeit bei konservativen Kräften 5.1.2) Arbeit bei konservativen Kräften z z1 Auf allen gezeigten Wegen wird Arbeit W = m⋅g⋅h benötigt, um Gewicht von Punkt P1 auf Punkt P2 zu bewegen: nur für Bewegungsabschnitte parallel zur z-Achse wird Arbeit geleistet, für Bewegungsabschnitte parallel zur x-Achse wird (Reibung vernachlässigt, nicht in Gravitation enthalten!) keine Arbeit verrichtet Weg 1 P1 Weg 2 z0 ∆z = z1-z0 =h Weg 3 P0 F = -mg z x x0 x1 5.1.2) Arbeit bei konservativen Kräften 5.1.2) Arbeit bei konservativen Kräften Arbeit entlang Weg 1 ist identisch zu Arbeit entlang Weg 2 y Bewegung entlang Äquipotentiallinien: es wird KEINE Arbeit verrichtet, da Kraft zum Mittelpunkt zeigt, und daher senkrecht auf Bewegungsrichtung zeigt. Bewegung senkrecht zu Äquipotentiallininen: es wird Arbeit verrichtet, da Kraft parallel zur Bewegung. Jeder Weg kann aus Wegstücken parallel und senkrecht zu den Äquipotentiallinien zusammengesetzt werden ⇒ Arbeit hängt NUR vom Anfangs und Endpunkt, NICHT vom Weg ab! 2 1 m1 x Trick: bei konservativen Kräften kann man immer zum Ausrechnen von Arbeit den EINFACHSTEN Weg aussuchen, da Arbeit nicht von gewähltem Weg abhängt 5.1.3) Zusammenhang Potential – potentielle Energie r E pot ( r ) = − ∫ F( r )d r ∞ r 1 F( r ) = − c ⋅ grad(ϕ ( r )) ⇔ ϕ ( r ) = − ∫ F( r )d r c∞ ⇒ E pot (r) = c ⋅ ϕ (r) 5.1.2) Arbeit bei konservativen Kräften Beispiel: Arbeit um eine bewegliche Masse m2 im Gravitationsfeld einer festen Masse m1 von P1 nach P2 zu verschieben: W1→2 Weg B r1 P1 m2 m1 r2 P2 Weg A r2 r2 1 1 dr = − ∫ Fd r = − γ ⋅ m1 ⋅ m 2 ⋅ ∫ 2 = − γ ⋅ m1 ⋅ m 2 ⋅ − r r2 r1 r1 r1 D.h., die Arbeit um m2 von P1 nach P2 zu verschieben hängt nur von den Beträgen r1 und r2 ab, aber nicht vom Weg. Jeder beliebige Weg S im Zentralpotential lässt sich aus kleinen Wegstücken ds in radialer bzw. tangentialer Richtung zusammensetzen jedes beliebige Massenverteilung lässt sich wegen der Additivität der Gravitationskraft aus Feldern von Punkmassen zusammensetzten. Das Potential r0 ϕ ( r0 ) = −c ⋅ ∫ F( r ) ⋅ d r ∞ am Ort r0 ist unabhängig davon, auf welchem Weg man von ∞ nach r0 gelangt ist. 5.1.2) Arbeit bei konservativen Kräften Arbeit und potentialle Energie bei Zentralkräften: Aus der Wegunabhängigkeit des elektrischen Potentials folgt unmittelbar: ∫ F( r ) ⋅ d r = 0 C Der Kreis im Integral bedeutet dabei, daß das (Linien-) Integral entlang einer geschlossenen Kurve C, d.h. einer Kurve, die wieder zu ihrem Ausgangspunkt zurückkehrt, berechnet wird. Diese Gleichung gilt für beliebige geschlossene Kurven CMan sagt auch: Die „Zirkulation“ des elektrischen Feldes ist null, oder das elektrische Feld ist „wirbelfrei“. m1 C Hinweis: Der Begriff „Zirkulation“ stammt aus der Strömungslehre. Unter der „Zirkulation“ einer Strömung versteht man: F ⋅ dr ∫ Mathematisch kann man die „Zirkulation“ nicht nur entlang einer geschlossenen Kurve berechnen, sondern auch an einem beliebigen Punkt. Man spricht dann von der „Rotation“: ∂ ∂x Fx ∂Fz ∂y − ∂Fy ∂z rot F = ∇ × F = ∂ ∂y × Fy = ∂Fx ∂z − ∂Fz ∂x ∂ ∂z F ∂F ∂x − ∂F ∂y x z y 5.1.3) Zusammenhang Potential – potentielle Energie (entnommen aus: Potential (Physik) – Wikipedia) 5.1.3) Zusammenhang Potential – potentielle Energie Kraft F( r ) F=cE r Feld E( r ) r E pot ( r ) = - ∫ F( r ) d r ϕ ( r ) = - ∫ E( r ) d r d F( r ) = - E pot ( r ) dr d E( r ) = - ϕ( r ) dr ∞ potentielle Energie E pot ( r ) ∞ E pot ( r ) = c ⋅ ϕ ( r ) Potential ϕ (r) 5.1.4) Leistung Definition Leistung P: P = dW/dt Leistung = Arbeit pro Zeit wenn dieselbe Arbeit in der doppelten Zeit verrichtet wurde, dann war Leistung nur die Hälfte Einheit der Leistung ist das Watt: 1 W = 1 J/s Beispiele für Leistungsangaben: Leistung eines Autos: 1 PS (Pferdestärke) = 736 W Leistung einer Glühbirne: 7 W - 100 W Spezialfall: W = const P = W/t 5.2) Energieerhaltung 5.2.1) Formen von Energie 5.2.2) Potentielle und kinetische Energie 5.2.3) Umwandlung kinetische ↔ potentielle Energie 5.2.4) Potentiallandschaften 5.2.1) Formen von Energie Es gibt verschiedene Formen von Energie (alle haben gleiche Einheit Joule): - mechanische Energie (Arbeit) W (vgl. Kap. 5.1.1) - elektrische Energie - Wärme Q - chemische Energie - kinetische Energie eines Massepunktes - potentielle Energie eines Massepunktes etc. Energien können ineinander umgewandelt werden (1. Hauptsatz; aber 2. HS berücksichtigen! Wärme kann z.B. nicht ohne Einschränkung in Arbeit umgewandelt werden). Es geht keine Energie verloren! (vgl. 5.2) Beispiele für Energieumwandlung: Elektromotor: elektrische Energie → mechanische Energie Wasserkraftwerk, Dynamo: mechanische Energie → elektrische Energie Herdplatte, Glühbirne: elektrische Energie → Wärme Kohlekraftwerk: chemische Energie → Wärme → elektrische E. Kernkraftwerk: (Masse → Wärme → elektrische E.) (E = mc2 vgl. Kap. 11) 5.2.1) Formen von Energie Die Gesamtenergie E eines geschlossenen Systems ist eine Erhaltungsgröße E = const. ( dE/dt = 0, d2E/dt2 = 0,....) Die Gesamtenergie eines Systems kann sich aus verschiedenen Arten von Energie zusammensetzen, z.B. kinetischer Energie, potentieller Energie, Wärme, etc. E = Ekin + Epot + Q + ... Es kann Energie der einen Art in eine andere Art gewandelt werden, z.B. kinetische Energie in potentielle Energie. Die Gesamtenergie bleibt konstant, aber nicht die Teilenergien. z.B. ist die kinetische Energie im Allgemeinen keine Erhaltungsgröße! Erhalten ist nur die Gesamtenergie! (vgl. auch 1. + 2. Hauptsatz der der Thermodynamik) 5.2.2) Potentielle und kinetische Energie Beispiel Feder: Feder mit der Federkonstante k (vgl. 3.1.2) wird um Strecke x ausgezogen. Dazu ist nach Hooke‘schem Gesetz die Kraft F = -k⋅x k = Federkonstante; x = Auslenkung der Feder Dazu ist nach Kap. 5.1.1 die mechanische Arbeit W = ½⋅k⋅x2 nötig: x ∫ W = - F(x) ⋅ dx (rücktreibenden Kraft F(x) = - k ⋅ x wirkt entgegen der Zugrichtung) 0 (Kraft und Zugrichtung sind (anti-) parallel in x - Richtung) x x x [ ] x 1 1 1 1 = - (-k ⋅ x) ⋅ dx = k ⋅ x ⋅ dx = k ⋅ x 2 = k ⋅ x 2 0 = k ⋅ ( x 2 − 0 2 ) = k ⋅ x 2 2 2 2 0 2 ∫ 0 ∫ 0 • Diese Energie ist nun "in der Feder gespeichert", die Feder hat potentielle Energie! • Diese Energie kann durch Loslassen der Feder wieder freigesetzt werden: Wenn Feder aus ihrer gestreckter Position losgelassen wird schnallt sie zurück. Dabei wird potentielle Energie in Bewegungsenergie (= kinetische Energie) umgewandelt potentielle Energie einer gespannten Feder: W = ½⋅k⋅x2 5.2.2) Potentielle und kinetische Energie • x • 0 F 0 x x • Feder in Ruhelage hat keine Energie Es wird an Feder gezogen; Feder wird dabei ausgedehnt. Nach dem Hookeschen Gesetz wirkt dabei rücktreibende Kraft proportional zur Auslenkung auf Feder: F=-k⋅x Beim Ausziehen der Feder wurde Arbeit W = ½⋅k⋅x2 > 0 geleistet. Diese Arbeit ist nun als potentielle Energie in Feder "gespeichert": Epot = ½⋅k⋅x2 Lässt man Feder los, schnellt sie zurück. Potentielle Energie wird in Bewegungsenergie (= kinetische Energie) umgewandelt. wenn Feder in Ausgangslage zurückkehrt ist sie nicht in Ruhe, sondern hat eine Geschwindigkeit durch mechanische Arbeit (z.B. Spannen einer Feder) kann in einem System potentielle Energie Epot gespeichert werden. Diese läßt sich als kinetische Energie ½mvm2 freisetzen (vgl. Kap. 5.2) Epot = ½mvm2 ⇒ vm2 = 2⋅Epot/m vm = (2⋅Epot/m )1/2 vm = maximale Geschwindigkeit der Kugel kleine Kugel bekommt (bei selber in Feder gespeicherter Energie) eine höhere Maximalgeschwindigkeit (wenn Gewicht fest an Feder gekoppelt wäre, dann würde es um Ruhelage hin-und-herschwingen und dabei laufend potentielle in kinetische Energie (und umgekehrt) umwandeln 5.2.2) Potentielle und kinetische Energie Anderer Aufbau: Masse auf Feder legen. Wie groß ist gespeicherte potentielle Energie? entspannte Feder 0 Kräfte auf Feder auf der Gewicht liegt: durch Gewicht • Gewichtskraft FG = mg in positive x-Richtung gestauchte • Rücktreibende Kraft FH = -k⋅x in negative xFeder Richtung (Hookesches Gesetz) Gesamtkraft F = FG + FH = mg - k⋅x Im Gleichgewicht kann Gewicht die Feder um Strecke x= ∆x nach unten drücken, bis rücktreibende Kraft nach oben genauso groß wie Gewichtskraft nach unten ist im Gleichgewicht gilt F = 0 0 = mg - k⋅ ∆x ∆x = mg/k FH ∆x FG x Wie viel mechanische Arbeit W wird verrichtet wenn Feder von x = 0 nach x = ∆x nach unten gedrückt wird? ∆x ∆x ∆x W=- ∫ 0 F(x)dx = - ∫ 0 1 (mg - kx)dx = − mgx − kx 2 2 0 1 = − mg∆x − k (∆x ) 2 − 0 + 0 2 m 2g 2 1 m 2g 2 1 m 2g 2 1 1 mg 2 mg ) =− ) + k( = −mg( + =− = − k ( ∆x ) 2 k 2 k 2 k 2 k 2 k 5.2.2) Potentielle und kinetische Energie Arbeit W beim Eindrücken der Feder durch Auflegen der Masse m: W = - ½k(∆x)2 (negatives Vorzeichen, weil Energie "gespeichert wird"; Gewicht ist durch Schwerkraft "freiwillig" nach unten gefallen) Feder wird hier nur durch Gewichtskraft gestaucht. Gestauchte Feder wird arretiert, Masse m entfernt. Nach Drücken (und Arretierung!) der Feder hat diese die potentielle Energie Epot = ½k(∆x)2 = ½m2g2/k (vgl. Seite vorher!) Je größer die Masse bei Stauchen der Feder war, umso höher potentielle Energie Achtung: die potentielle Energie kann erst freigesetzt werden, wenn die Masse die zum Stauchen verwendet wurde wieder entfernt wird. Solange Orginalmasse m auf Feder liegt, wird diese durch Schwerkraft gestaucht; Trick: Feder wird durch Auflegen von Masse m gestaucht, dann arretiert, Masse m kann entfernt werden, und potentielle Energie ist gespeichert (wegen Arretierung der Feder) Nun: auf arretierte Feder Kugel der Masse M legen, und Arretierung lösen Wie groß ist maximale Geschwindigkeit der Kugel nach Loslassen der Feder? Potentielle Energie wird vollständig in kinetische Energie umgewandelt: ½m2g2/k = ½Mvm2 vm2 = m2g2/Mk vm = (m2g2/Mk)1/2 (maximale Geschwindigkeit der Kugel) Wird Feder durch großes Gewicht m gespannt, bekommt Kugel M höhere Maximalgeschwindigkeit! 5.2.2) Potentielle und kinetische Energie Beispiel Heben und Fallen einer Kugel: Kugel der Masse m von Boden (z = 0) auf Höhe z = h heben. Dazu ist nach Kap. 5.1.1 die mechanische Arbeit W = m⋅g⋅h nötig (g = Gravitationskonstante); Diese Energie ist nun "in Kugel gespeichert", die Kugel hat potentielle Energie! Diese Energie kann durch Loslassen der Kugel freigesetzt werden: Wenn Kugel auf Höhe h gehoben wurde kann sie von dort herunterfallen. Dabei wird potentielle Energie in Bewegungsenergie (= kinetische Energie) umgewandelt z 0 h 0 z • Kugel liegt auf Boden • Kugel wird mit Kraft auf Höhe h gehoben. Die Kraft muss dabei die Schwerkraft F = -mg überwinden. Die geleistete Arbeit zum Heben der Kugel ist W = mgh Kugel hat nun diese Energie "gespeichert": Epot = mgh • Wird Kugel losgelassen, fällt sie nach unten auf Boden zurück. Dabei wird die potentielle Energie in Bewegungsenergie (= kinetische Energie) umgewandelt Kugel kommt auf Boden nicht in Ruhe sondern mit Geschwindigkeit v an (Test: Finger drunter halten... tut weh") F 5.2.2) Potentielle und kinetische Energie Wird an System mechanische Arbeit geleistet (z.B. Ziehen an Feder, Heben von Gewicht), kann geleistete Arbeit als potentielle Energie gespeichert werden. Energie kann später "beim Loslassen" (Ungleichgewichtszustand) in Bewegungsenergie (= kinetische Energie) umgewandelt werden. Kugel mit Masse m um Höhe h heben zum Heben war Arbeit W = mgh nötig, die nun als potentielle Energie "gespeichert„ ist. Fällt Kugel, wird die potentielle Energie in kinetische Energie umgewandelt. Wie groß ist Geschwindigkeit der Kugel wenn sie wieder auf Boden trifft (Strecke h nach unten gefallen ist)? 5.2.2) Potentielle und kinetische Energie Aus Kap. 4.3: fallende Kugel = geradlinige gleichmäßig beschleunigte Bewegung (a = -g); entspricht freier Fall: x(t) = -½⋅g⋅t2 + v0⋅t + x0 v0 = 0, Kugel ist beim Loslassen in Ruhe und auf Höhe x0 = h = h -½⋅g⋅t2 v(t) = -g⋅t + v0 = -g⋅t t = -v/g Beim Fallen auf Boden zurückgelegte Strecke (zur Zeit t' treffe Kugel auf Boden auf): x(t') = 0 0 = h - ½⋅g⋅t'2 h = ½⋅g⋅t'2 = ½⋅g⋅(-v/g)2 = ½⋅g⋅v2/g2 = ½⋅v2/g gh = ½⋅v2 m⋅g⋅h = ½⋅m⋅v2 Epot = mgh, Ekin = ½mv2 Nach Fallen der Höhe h wurde die potentielle Energie der Kugel mgh in die kinetische Energie ½mv2 umgewandelt: Kugel kommt mit Geschwindigkeit v auf Boden an 5.2.2) Potentielle und kinetische Energie Beispiel Beschleunigung einer Kugel der Masse von Geschwindigkeit v1 auf v2: v1 v2 x Zeitpunkt t2: Zeitpunkt t1: Dazu ist Arbeit W nötig : dv mit F = ma und a = dt x(t1 ) x(t2 ) x(t2 ) t2 t2 v(t2 ) v(t2 ) d x dv dx dv dv d x = − ∫ m ⋅ a ⋅ dx = - m ⋅ ∫ ⋅ dx = - m ⋅ ∫ ⋅ dt = - m ⋅ ∫ ⋅ ⋅ dt = - m ⋅ ∫ ⋅ dv = - m ⋅ ∫ v ⋅ dv dt dt dt dt dt dt x(t1 ) x(t1 ) t1 t1 v(t1 ) v(t1 ) x(t2 ) W = − ∫ F (x ) ⋅ d x v y2 v 2 v x dv x v z2 v x2 = - m ⋅ ∫ v ⋅ dv = - m ⋅ ∫ v y ⋅ dv y = - m ⋅ ∫ v x ⋅ dv x + ∫ v y ⋅ dv y + ∫ v z ⋅ dv z v x1 v1 v y1 v z1 v1 dv v z z 1 2 v x2 1 2 v y2 1 2 v z2 1 v x2 v y2 v z2 = - m ⋅ v x + v y + v z = - m ⋅ v 2x v x1 + v 2y v + v 2z v z1 y1 2 v x1 2 v y1 2 v z1 2 v2 1 1 mit v i = v i = v 2xi + v 2yi + v 2zi (i = 1, 2) = - m ⋅ v 2 v1 = - m ⋅ v 22 − v 12 2 2 1 1 = − ⋅ m ⋅ v 22 − ⋅ m ⋅ v 12 = - (Ekin2 − Ekin1 ) 2 2 v2 [[ [ ] ( ) ] [ ] [ ] ] 5.2.2) Potentielle und kinetische Energie potentielle Energie beim Heben einer Masse um Höhe h: kinetische Energie einer mit Geschwindigkeit v bewegten Masse m: Dies ist die allgemeine Definition der kinetischen Energie keine Bewegung (v = 0) kinetische Energie = 0 Epot = mgh Ekin = ½mv2 5.2.2) Potentielle und kinetische Energie Beispiel: Wie groß ist die Bewegungsenergie eines Autos der Masse m= 1000 kg bei einer Geschwindigkeit von v= 100 km/h (in Joule)? Bewegungsenergie = kinetische Energie: Ekin = ½⋅m⋅v2 = ½⋅1000kg ⋅(100km/h)2 = ½⋅1000kg ⋅(100km/h)2 = 500kg ⋅(100⋅ 1000m/ (60⋅60s) )2 = 500kg ⋅(100000m/3600s )2 ≈ 500kg ⋅(27,8 m/s )2 ≈ 500kg ⋅772m2/s2 ≈ 386000 kg⋅m2/s2 = 386000 N⋅m = 386000 J = 386 kJ 5.2.3) Umwandlung kinetische ↔ potentielle Energie Beispiel für Energieerhaltung: Springender Ball h hmax am Boden: nur kinetische Energie ½mv2 in maximaler Höhe: nur potentielle Energie mgh 0 t Bei jedem Stoß verliert Ball etwas kinetische Energie die in Wärme / Deformationsenergie gewandelt wird Gesamtenergie = kinetische Energie + potentielle Energie + Wärme/Reibungsenergie/Deformationsenergie...... Erhalten ist die Gesamtenergie! Dies gilt IMMER kinetische Energie i.A. NICHT erhalten! Falls Reibung etc. vernachlässigt wird, ist oft Summe aus kinetische und potentieller Energie erhalten 5.2.3) Umwandlung kinetische ↔ potentielle Energie • Ball wird aus Höhe h = hmax mit Anfangsgeschwindigkeit v = 0 auf Boden fallen gelassen. Ball hat in Höhe hmax potentielle Energie Epot = mghmax und kinetische Energie Ekin = ½mv2 = 0, also Gesamtenergie E = Epot + Ekin = mghmax + 0 = mghmax • Ball fällt nun im freien Fall (vgl. 4.3) wegen Schwerkraft nach unten. Dabei verliert der Ball laufend an Höhe, d.h. an potentieller Energie Epot = mgh. Dafür nimmt Geschwindigkeit zu (linear mit Zeit). Am Boden angekommen h = 0 hat Körper keine potentielle Energie mehr Epot = mg0 = 0, dafür hat er maximale Geschwindigkeit vmax (da Geschwindigkeit beim Fall permanent gewachsen ist) und damit die kinetische Energie Ekin = ½mvmax2. Die Gesamtenergie des Körpers bei Auftreffen auf Boden ist damit E = Epot + Ekin = 0 + ½mvmax2 • Es gilt Energieerhaltung: Energie in maximaler Höhe ist gleich wie Energie auf Boden, d.h. mghmax = ½mvmax2 vmax = (2ghmax)1/2. Es wurde beim Fall also potentielle Energie komplett in kinetische Energie gewandelt. Gesamtenergie bleibt dabei erhalten • Auf Boden wird Ball reflektiert (elastischer Stoß, vgl. Kap. 5.4). Dabei bleibt der Betrag der Geschwindigkeit erhalten, nur die Richtung der Geschwindigkeit dreht sich um (vorher ist der Ball nach unten gefallen, jetzt steigt er nach oben) 5.2.3) Umwandlung kinetische ↔ potentielle Energie • Ball steigt nun mit Anfangsgeschwindigkeit vmax nach oben entgegen der Schwerkraft. Dabei nimmt die Höhe h und damit die potentielle Energie mgh laufend zu. Die Geschwindigkeit v nimmt dagegen ab, solange bis der Ball auf maximaler Höhe angekommen ist. Dort ist die Geschwindigkeit v = 0, d.h. beim Steigen des Balls wurde die komplette kinetische Energie in potentielle Energie gewandelt • nun fällt der Ball wieder nach unten, d.h. potentielle Energie wird in kinetische gewandelt, u.s.w. • Die Steighöhe des Balls nimmt aber im Verlauf der Zeit ab, d.h. der Ball steigt immer weniger. Warum? Bei Stoß des Balls auf Boden geht in Realität kinetische Energie verloren (⇒ inelastischer Stoß, vgl. Kap. 5.4). Der Ball wird bei Aufprall deformiert und dabei entsteht Wärme Q. Dieser Energiebetrag (Wärme) fehlt jetzt in der kinetischen Energie, d.h. die Geschwindigkeit vmax wird verringert. Der Ball steigt also mit geringerer Geschwindigkeit nach oben, kommt also nur noch auf geringere Höhe. Die Energie bleibt dabei immer erhalten. E = Epot + Ekin + Q. Mit dem Laufe der Zeit entsteht immer mehr Wärme und der Teil der Energie der zyklisch zwischen potentieller und kinetischer Energie wechselt wird kleiner 5.2.3) Umwandlung kinetische ↔ potentielle Energie Ein Ball mit der Masse 1 kg fällt mit 1 m/s auf den Fußboden. Es gibt keine Deformation des Balles / Fußbodens. Wie hoch springt der Ball maximal (Abschätzung!) 25% 1. 2. 3. 4. 25% 25% 2. 3. 25% 0,025 m 0,05 m 0,1 m 0,22 m 1. 4. 5.2.3) Umwandlung kinetische ↔ potentielle Energie bei Auftreffen am Boden: nur kinetische Energie (Höhe h = 0!) Ekin = ½ m v2 nach Reflexion and Boden, wenn Ball auf maximaler Höhe ist (Geschwindigkeit v = 0): nur potentielle Energie Epot = mgh Energieerhaltung: alle kinetische Energie beim Auftreffen wird in potentielle Energie bei maximaler Höhe umgewandelt: Ekin = Epot ⇒ ½ m v2 = mgh ⇒ h = ½ v2 /g = 0.5⋅ (1m/s)2 / 10 m/s2 = 0.05 m 5.2.3) Umwandlung kinetische ↔ potentielle Energie Ein Ball mit der Masse 10 kg fällt mit 1 m/s auf den Fußboden. Es gibt keine Deformation des Balles / Fußbodens. Wie hoch springt der Ball maximal (Abschätzung!) 96% 1. 2. 3. niedriger als Ball mit 1 kg gleich wie Ball mit 1 kg höher als Ball mit 1 kg 4% 0% 1. 2. 3. 5.2.3) Umwandlung kinetische ↔ potentielle Energie bei Auftreffen am Boden: nur kinetische Energie (Höhe h = 0!) Ekin = ½ m v2 nach Reflexion am Boden, wenn Ball auf maximaler Höhe ist (Geschwindigkeit v = 0): nur potentielle Energie Epot = mgh Energieerhaltung: alle kinetische Energie beim Auftreffen wird in potentielle Energie bei maximaler Höhe umgewandelt: Ekin = Epot ⇒ ½ m v2 = mgh ⇒ h = ½ v2 /g Masse kürzt sich raus!!! ⇒ Sprunghöhe hängt nicht von Masse ab! 5.2.3) Umwandlung kinetische ↔ potentielle Energie Beispiel für zyklische Umwandlung von potentielle Energie in kinetische Energie: Konstruktion von Escher: • Am Wasserfall wird potentielle Energie in kinetische Energie gewandelt: Wassermoleküle fallen aus Höhe h herunter und gewinnen dabei an Geschwindigkeit • in Rinne wird kinetische Energie in potentielle Energie gewandelt: Wassermoleküle fließen durch ihre Anfangsgeschwindigkeit entgegen der Schwerkraft die Rinne nach oben. Dabei nimmt die Höhe laufend zu und die kinetische Energie (Geschwindigkeit) ab. • • Oben angekommen fallen die Wassermoleküle wieder den Wasserfall hinunter, etc. Würde dieses System für immer laufen wäre dies ein perpetuum mobile in welchem zyklische kinetische und potentielle Energie ineinander umgewandelt werden. Dies funktioniert aber nicht, da ein Teil der kinetischen Energie immer als Reibungsenergie / Deformationsenergie / Wärme verloren geht. 5.2.3) Umwandlung kinetische ↔ potentielle Energie •ausgelenktes Pendel hat potentielle Energie h = Höhe der ausgelenkten Kugel Epot = mgh •Kugel loslassen potentielle Energie wird in kinetische Energie umgewandelt •Kugel schwingt von linker Seite nach rechte Seite. Auf rechter Seite wird Kugel wieder bis zur Höhe h ausgelenkt. Bei maximaler Auslenkung ist alle kinetische Energie in potentielle Energie gewandelt •Kugel schwingt wieder von rechts nach links. Wegen Energieerhaltung kann Kugel nie mehr als auf Höhe h steigen, da die maximale Energie Epot = mgh ist •Kugel pendelt periodisch von hin und her. An Auslenkungspunkten ist jeweils potentielle Energie maximal und kinetische Energie 0 (v=0), am Mittelpunkt ist potentielle Energie 0 und kinetische Energie maximal •Wegen Reibung wird Auslenkungshöhe mit Zeit abnehmen, d.h. es geht potentielle/kinetische Energie als Reibungsenergie "verloren" 5.2.3) Umwandlung kinetische ↔ potentielle Energie An Ausgangsposition auf Höhe h hat Kugel maximale potentielle Energie Epot = mgh (m = Masse der Kugel) am Boden ist alle potentielle Energie in kinetische Energie Ekin = ½mvmaximal2 umgewandelt mgh = ½mvm2 2gh = vm2 vm = (2gh)1/2 h Die Maximalgeschwindigkeit hängt von der Starthöhe, aber nicht von der Masse der Kugel an, d.h. nur die Starthöhe entscheidet ob Kugel genügend Geschwindigkeit hat um Looping zu durchlaufen 5.2.3) Umwandlung kinetische ↔ potentielle Energie Beispiel: Achterbahn Auf einer Achterbahn bewegt sich ein Wagen (Gesamtmasse: m = 700 kg) mit der Geschwindigkeit 3 m/s durch den Punkt A und rollt dann ohne Antrieb über B nach C. a) Wie groß ist die Geschwindigkeit des Wagens je im Punkt C und Punkt B, wenn man von Reibungskräften absieht? b) Ändert ein Looping im Punkt B etwas an der Geschwindigkeit im Punkt C? Begründe! 5.2.3) Umwandlung kinetische ↔ potentielle Energie a) Energieerhaltung: In Punkt B ist die gesamte kinetische und potentielle Energie des Wagens, die dieser an Punkt A hatte, in kinetische Energie umgewandelt: Am Punkt C ist wird nur ein Teil der potentiellen Energie des Wagens in Punkt A in kinetische Energie umgewandelt: b) Solange keine Reibung vorhanden ist, ist es für die Geschwindigkeit des Wagens an Punkt C irrelevant, auf welchem Weg er dort hingefahren ist. 5.2.3) Umwandlung kinetische ↔ potentielle Energie Ein Puck (Eishockey-Ball) läuft eine Eisrampe reibungsfrei hinauf. Wird er es auf das obere Niveau schaffen? h = 1m v = 4m/s 48% 1. 2. 3. Ja Nein ohne Massenangabe nicht zu beantworten 37% 15% 1. 2. 3. 5.2.3) Umwandlung kinetische ↔ potentielle Energie Ein Puck (Eishockey-Ball) läuft eine Eisrampe reibungsfrei hinauf. Wird er es auf das obere Niveau schaffen? v = 4m/s h = 1m 5.2.3) Umwandlung kinetische ↔ potentielle Energie • Kugel an Schlauchspitze in Höhe h maximale potentielle Energie und keine kinetische Energie (Geschwindigkeit 0) • Saugen am Schlauch abstellen Kugel fällt im freien Fall nach unten potentielle Energie wird in kinetische Energie umgewandelt. Bei Ankunft auf Boden ist alle potentielle Energie (mgh) in kinetische Energie umgewandelt Kugel hat maximale Geschwindigkeit. An Boden wird Kugel reflektiert (elastischer Stoß, vgl. 5.4) Betrag der Geschwindigkeit bleibt erhalten, aber Richtung kehrt sich um. Geschwindigkeit bewegt Kugel jetzt entgegen Schwerkraft nach oben. Dabei verringert sich Geschwindigkeit bzw. kinetische Energie der Kugel. Kugel gewinnt Höhe und so potentielle Energie. • Kugel kommt an Schlauchspitze an, alle kinetische Energie ist jetzt in potentielle Energie gewandelt Geschwindigkeit der Kugel ist 0. Kugel fällt wieder nach unten, u.s.w. 5.2.3) Umwandlung kinetische ↔ potentielle Energie Beispiel: Armbrust Eine Armbrust kann einen Pfeil (m = 100g) h = 100 m hoch schießen. Der Spannweg l beträgt 10 cm. Mit welcher Maximalkraft Fmax muss die Armbrust gespannt werden? Lösung: Energieerhaltung: Die potentielle Energie Epot, die der Pfeil bei h=100m hat, muss mit der Spannarbeit WSpann der Armbrust gleichgesetzt werden. Über diesen Zusammenhängt ergibt ich die Federkonstante k der Armbrust. Bei maximaler Auslenkung ist die benötigte Kraft nach dem Hook‘schen Gesetz am größten, daraus folg der Wert für die Maximalkraft. WSpann = ½⋅k⋅l2 (Arbeit zum Spannen einer Feder, vgl. Kap. 5.2.2) (Potentielle Energie einer Masse die auf Höhe h gebracht wird) Epot = mgh WSpann(l = 10cm) = Epot(h = 100m) ⇒ ½⋅k⋅l2 = mgh ⇒ k = 2mgh/l2 = 2 ⋅0.1kg ⋅9,81N/kg ⋅100m /(0,1m)2 ≈ 20000 N/m Fmax = k⋅l = 20000 N/m ⋅ 0,1 m = 2000 N 5.2.3) Umwandlung kinetische ↔ potentielle Energie Beispiel: Schleuder: 2 Federn der Länge l0, Federkonstante k; Masse m wird in –y Richtung von y0 = 0 nach y1 = -l0 ausgelenkt (Spannen der Federn), vgl. Kap. 5.1.1. Wie groß ist die Geschwindigkeit der Masse bei y = 0 wenn die Schleuder losgelassen wird. l 5.2.4) Potentiallandschaften Beispiel: ortsabhängige potentielle Energie Epot(x) = k⋅x2 (vgl. Kap. 8 harmonischer Oszillator) Gesamtenergie E = const = Ekin(x) + Epot(x) ⇒ An jeder Stelle x kann kinetische Energie und damit Geschwindingkeit v(x) des Massepunktes angegeben werden: Ekin(x) = E - Epot(x) = ½mv2 Epot(x) E Ekin(x) 0 Epot(x) 0 x E 0 -x0 -½x0 0 ½x0 x0 x • Masse starte bei x = -x0 ⇒ Ekin = 0 ⇒ v = 0 (da E = Epot) Kraft in +x – Richtung: F = -dEpot(x)/dx > 0 maximale Kraft, da maximale Steigung dEpot/dx ⇒ maximale Beschleunigung der Masse nach rechts. • Masse erreicht x = -½x0 ⇒ Ekin(x) = E - Epot(x) > 0 Immer noch Kraft in x-Richtung, da Steigung dEpot/dx weiter negativ; v > 0 • Masse erreicht x = 0 ⇒ Ekin(x) = E > 0, da Epot = 0 ⇒ maximale Geschwindigkeit v = vmax nach rechts keine Kraft, da F = -dEpot(x=0)/dx = 0 • Masse erreicht x = ½x0 ⇒ Ekin(x) = E - Epot(x) > 0 Nun Kraft in -x-Richtung, da Steigung dEpot/dx negativ; v > 0 • Masse erreicht x = x0 ⇒ Ekin = 0 ⇒ v = 0 (da E = Epot) Kraft in -x – Richtung: F = -dEpot(x)/dx < 0 (vgl Kap. 5.1.3) maximale Kraft, da maximale Steigung dEpot/dx ⇒ maximale Beschleunigung der Masse nach links. Bewegungsrichtung dreht sich • Masse erreicht x = ½x0 ⇒ Ekin(x) = E - Epot(x) > 0 Kraft in -x-Richtung, da Steigung dEpot/dx negativ; v < 0 • Masse erreicht x = 0 ⇒ Ekin(x) = E > 0, da Epot = 0 ⇒ maximale Geschwindigkeit v = -v nach links; F = -dE (x=0)/dx = 0 5.2.4) Potentiallandschaften Epot(r) E>0 0 Ekin(r) 0 E<0 Ekin(r) E > 0 ⇒ ungebundener Zustand wenn Masse sich nach rechts bewegt gibt es keinen Umkehrpunkt (da keine ausreichende rücktreibende nach links), d.h. Masse wird sich für immer nach rechts bewegen 5.2.4) Potentiallandschaften Ein Objekt bewegt sich entlang der x-Richtung. Welche Aussage muß korrekt sein? EU(x) pot(x) x x=A 100% 1. 2. 3. 4. 5. Die Geschwindigkeit ist negativ, also entlang –x Die Beschleunigung ist negativ Die Gesamtenergie ist negativ Die kinetische Energie ist positiv Keine der Aussagen 1-4 muß richtig sein 0% 1. 0% 2. 0% 3. 0% 4. 5. 5.2.4) Potentiallandschaften EU(x) pot(x) 0 x1 x2 E x=A x