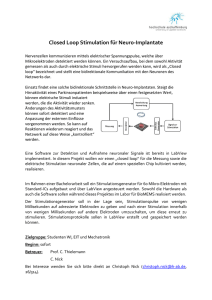
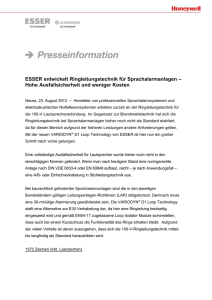
Steuerung und Regelung
Werbung

1 / 29
Controller
Aps
Aps
Aps
Aps
Aps
Aps
Aps
Aps
Middleware
rodos
RT-OS
rodos
Drivers
rodos
Hardware: Rechner + IO Devices
(zentralavionik)
2 / 29
Das ist KEINE
Regelungsvorlesung
... Auch keine Messtechnik
Schwerpunkt: Zustandserfassung, Schätzung: Estimator
Labor....
Wenn ich Sachen erzähle die Ihr kennt, einfach sagen!
3 / 29
Steuerung oder Regelung
Steuerung
Open Loop
Regelung
closed Loop
Wünscht:
1. Stock
Wünscht:
1. Stock
Loop:
Berechnen:
Wieviel
Hydrauliköl
braucht man dafür?
Wie lange pumpen?
Sensor
Pos.
+
-
diff.
Berechnen:
mehr oder weniger Öl?
Loop? nein!
Pumpe solange aktivieren
Pump Proportional zu diff
4 / 29
Steuerung oder Regelung
Steuerung
Open Loop
Regelung
closed Loop
Keine Sensoren?
was nicht da ist
kann auch nicht
kaputt gehen!
aber... Wir fahren blind
Zustand: Position, Geschwindigkeit
Stromverbrauch, Ölmenge, Ölfluss, ....
5 / 29
Steuern oder Regeln
Closed Loop:
Ansteuern und
überwachen
Aktuator
Open Loop:
Befehlen
Steuerman setze Kur 123.4321
Sensoren
6 / 29
Steuern oder Regeln
Closed Loop:
Ansteuern und
überwachen
Pilot-In-The-Loop
sensors
Open Loop:
Befehlen
Air Trafic Control
„Climb to FL 25“
Aktuator
7 / 29
Steuern oder Regeln
Jetzt ohne Menschen „in the Loop“
Maschinen „In the Loop“
Kommandant
Steuermann
8 / 29
Die Schleife
Zyklus
Zyklus
Zyklus
Zyklus
Lesen Sensoren A, B, C (Position 1,2,3, Geschwindigkeit, Beschleunigung, etc)
Berechenen (dauert lange, z.B. aus Sternbild bis zu Quaternion dauert....)
→ Estimator (Wo sind wir jetzt)
→ Prediktor (So wie es läuft, wo werde ich zu dieser Zeit sein)
→ Korrekturen Berechnene: Regelung
→ Aktuatoren Ansteuern
9 / 29
Hier „nur“ Zustand Schätzung
Sensoren
-> Fusion + Math. Model -> Estimation
Hauptthema hier:
Position & Lage
Echt so schwer? .... man sieht es einfach!
10 / 29
Hier „nur“ Zustand Schätzung
Sensoren
-> Fusion + Math. Model -> Estimation
Hauptthema hier:
Position & Lage
Echt so schwer? .... man sieht es einfach!
Einfach????
Das beste am „Computing“
und... es irrt sich!
11 / 29
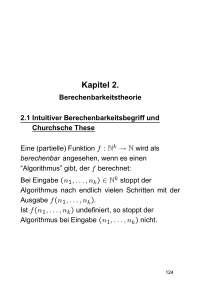
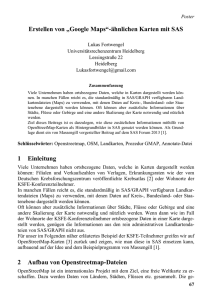
Typisches Regelungsdiagramm
Steuerung
(Open Loop)
Sollwert
reference
r
+
+ e
error
-
Regelung
(Closed Loop)
Ziel
z ~= r
genauer gesagt
x ~= r
Aufgabe
u setzen, so dass x ~= r
Stellwert
u
Strecke
x
(Process)
„Istwert“
x = Realer Zustand
(State)
z.B. 3D: v, a, lage, pos....
12 / 29
Typisches Regelungsdiagramm
Steuerung
(Open Loop)
Sollwert
reference
r
Für dies
sieht es wie ein Kommandant aus
es kann aber auch eine
übergeordnete Regelung sein!
+
+ e
error
-
Regelung
(Closed Loop)
Ziel
z ~= r
genauer gesagt
x ~= r
Aufgabe
u setzen, so dass x ~= r
Stellwert
u
Strecke
x
(Process)
„Istwert“
Kenne wir dies????
x = Realer Zustand
(State)
13 / 29
Typisches Regelungsdiagramm
unerwartet
unexpected
w
Steuerung
(Open Loop)
Sollwert
reference
r
+
+ e
error
-
Regelung
(Closed Loop)
geschätzte
„istWert“
Stellwert
u
rauschen
noise
v
Strecke
Senx
soren
(Process)
SensorFussion
z
oft wird es
y
genannt
x <- z
Ziel
z ~= r
genauer gesagt
x ~= r
Aufgabe
u setzen, so dass x ~= r
oft wird dies im Diagram
vergessen!
z = Messungen
x = Realer Zustand
(State)
14 / 29
Z != X
Mann misst xx? nein, man schätzt xx
Elektronisches Termometer
1. Top: misst Infrarot Strahlung
2. billig: misst Strom (eher Widerstand)
Pitot Tube
Luftdruck -> Spannung (Peltiet)
Spannung -> Gescnwindigkeit
Wie misst man 1200 Grad?
Loops: Messen Druck
Druck -> Spannung (Peltiet Elemente)
Spannung -> Temperatur
15 / 29
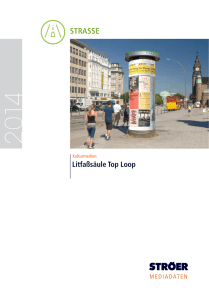
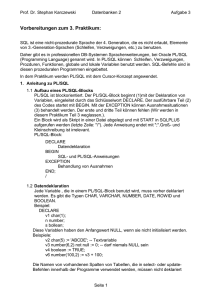
Typisches Regelungsdiagramm
unerwartet
unexpected
w
Steuerung
(Open Loop)
Sollwert
reference
r
+
+ e
error
-
Regelung
(Closed Loop)
geschätzte
„istWert“
Stellwert
u
rauschen
noise
v
Strecke
Senx
soren
(Process)
Estimator
z oder y
x <- z
Ziel
z ~= r
genauer gesagt
x ~= r
Aufgabe
u setzen, so dass x ~= r
Genauere
Schätzung
Mathematisches
Model
z = Messungen
x = Realer Zustand
(State)
16 / 29
Textuell
control(soll) {
x
= Prozess(w, u);
[z+v]
= Messung(x);
estim
= Estimator(z+v, modell(u));
u
= controll (e = estim - soll);
}
w:
v:
x:
u:
z:
e:
r:
Physikalische Störungen
Messrauschen & Messfehler
mein realer Zustand
meine Steuerungsbefehle, StellWert
Messung, Sensoren
Error, diff istWert - sollWert
Referenz, sollWert
// Realität, Phyisk
// Wie trenne ich Z und v???
// Das ist die Regelung
17 / 29
Steuerung / Regelung
Tempomat?
Wünscht:
120 km/h
v
r
w
u
z
x
Benzinpumpe
Modell:
motor: 1 ml/s Benzin -> 100 km/h
Sensor: 1 Volt -> 20 km/h
Straßenneigung -> ?
Sensorgenauigkeit?
was können wir messen?
18 / 29
Typisches Regelungsdiagramm
unerwartet
unexpected
w
Steuerung
(Open Loop)
Sollwert
reference
r
+
+ e
error
-
Regelung
(Closed Loop)
Stellwert
u
rauschen
noise
v
Strecke
Senx
soren
(Process)
y oder z,
„Istwert“
z -> x
Ziel
x ~= r
genauer gesagt
estimation ~= r
Aufgabe
u setzen, so dass x ~= r
Mathematisches
Model
x = Realer Zustand
(State)
Steuern:
Befehlen und vergessen
Willen -> Absicht -> Plan ->
rauschen
noise
v
Regeln
ansteuern und
soll
ständig überwachen
Steuerung r
u
Regelung
(Open Loop)
Aktuator
(Closed Loop) stell
x „ist“
(Schätzung)
unerwartet
unexpected
w
Strecke x
(process)
Sensoren
y
oder
z
Schätzer
Estimator
Pilot:
Regler
oder Kommandant?
Kapitän != Steuermann
Willen -> Absicht -> Plan ->
rauschen
noise
v
unerwartet
unexpected
w
Steuerung
(Open Loop)
soll
r
u
Regelung
Aktuator
(Closed Loop) stell
„ist“
(Schätzung)
x
Strecke x
(process)
Sensoren
y
oder
z
Schätzer
Estimator
In Software
App1:
Loop: 1x Sekunde
Loop???
Physik!
Willen -> Absicht -> Plan ->
App2:
Loop: 100x Sekunde
Steuerung
(Open Loop)
soll
r
Hardware
Loop: 500x Sekunde
u
Regelung
Aktuator
(Closed Loop) stell
x „ist“
(Schätzung)
App3:
Loop: 500x Sekunde
rauschen
noise
v
unerwartet
unexpected
w
Strecke x
(process)
Sensoren
y
oder
z
Schätzer
Estimator
22 / 29
Stimuli
=u
Bu
+
+
Zustand
=x
Cx
+
Messung
=z
Wo ist der Autopilot
in diesen Diagramm?
Wo ist die Regelung?
23 / 29
Bitte Erinnern...
Steuerung
(Open Loop)
Sollwert
reference
r
Für dies
sieht es wie ein Kommandant aus
es kann aber auch eine
übergeordnete Regelung sein!
+
+ e
error
-
Regelung
(Closed Loop)
Stellwert
u
Strecke
x
(Process)
„Istwert“
24 / 29
Geschachtelte Kontroll
Kaskaden Regelung
Plan
Steuerung
r
Regler 3
u r
Regler 2
u r
Regler 1
u
Aktuator
Strecke
(process)
Sensoren
z
Schätzer
Estimator
Schätzung gesamtes Zustands
(Estimation whole state/situation)
25 / 29
Geschachtelte Kontroll
Plan
Steuerung
r
Regler 3
u r
Regler 2
u r
Regler 1
u
Aktuator
Strecke
(process)
Sensoren
z
Schätzer
Estimator
Schätzung gesamtes Zustands
(Estimation whole state/situation)
Mathematisches
Modell
26 / 29
r
Weg
Regelung
r
V+ Kurs
Regelung
r
Lage
Regelung
u
x
Sensoren
MissionsPlan
Aktuatoren
z.b. Segelflieger
z
ZunstandsSchätzung
Lage
Schätzung
V + Kurs
Schätzung
PositionsSchätzung
27 / 29
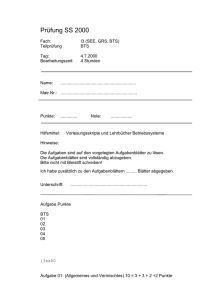
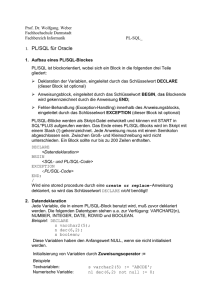
Geschachtelte Kontroll
Steuerung
z.B. Plan
Regelung
Höne
Höhe
Regelung
Speed
(V)-Speed
Regelung
Regelung
Pitch
Stellflächen
Pitsh
u
Aktuator
Prozess
Sensoren
Winkel der
Stellfäche
Schätzung gesamtes Zustands
(Estimation whole state/situation)
Schätzer
Estimator
1. Geschwindigkeit regelt man mit Pitsch, V-Speed regelt man mit Schub
2. Steuerung braucht nicht die Displays!
28 / 29
29 / 29
Aber ...
Hier „nur“ Zustand Schätzung
Position und Lage