Teil I Teil 1: Mechanik
Werbung

Teil I
Teil 1: Mechanik
9
Kapitel 1
Newtonsche Mechanik
1.1
Was versteht man unter einem Teilchen
(Massenpunkt)?
Als Teilchen (Massenpunkt) bezeichnen wir ein Objekt, dessen Abmessungen
man bei der Beschreibung der Bewegung vernachlässigen kann. Teilchen ist
also ein Näherungskonzept, eine Idealisierung. Aus der hier gegebenen Definition ist ersichtlich, dass man dabei nicht nur an die Teilchen denken muss,
aus denen die Materie zusammengesetzt ist. Zwar entsprechen z.B. Elektronen oder Protonen der Definition in fast allen Fällen, unter Umständen tun
es auch Atome oder Moleküle oder auch größere Objekte wie ein Auto. Das
Konzept ist also in einem viel größeren Bereich praktisch bzw. brauchbar.
Zur Verdeutlichung betrachten wir die folgenden einfachen Beispiele:
(1) Bewegung von Protonen (Protonradius ∼ 10−13 cm) in großen Kreisbeschleunigern (z.B. CERN-Beschleuniger bei Genf, dort gerade (2008)
der LHC (Large Hadron Collider) in Betrieb). Bahnradius 102 − 103 m,
Abweichungen von der Kreisbahn durch Schwingungen ∼ 1 cm. Im
Vergleich dazu spielt der Radius des Protons keine Rolle.
(2) Bewegung eines Satelliten (Abmessung einige m) um die Erde (Erdradius ∼ 6.000 km). Der Bahnradius betrage 3 Erdradien (∼ 18.000 km).
Im Vergleich dazu spielt die Abmessung des Satelliten sicher keine Rolle. Über den Einfluss der Abmessung der Erde muss man hingegen
nachdenken.
(3) Bewegung der Erde (r ∼ 6 · 103 km) um die Sonne (r ∼ 6.9 · 105 km).
Der mittlere Bahnradius beträgt ∼ 1.5 · 108 km; Unterschied größte kleinste Entfernung von der Sonne ∼ 6 · 106 km. Im Vergleich zu beiden
Bahndaten spielt die Abmessung der Erde keine Rolle.
11
Kapitel 1. Newtonsche Mechanik
Es kommt also auf die Abmessungen des Objektes im Vergleich zu charakteristischen Abmessungen für die Bewegung (Bahndaten) an. Die Modellvorstellung “Massenpunkt” ist also eine Idealisierung, die annimmt, dass
die Bahnkurve ohne Berücksichtigung der anderen Freiheitsgrade behandelt
werden kann. Die Anwendung des Modells ‘Massenpunkt” kann aber auch
fehlerhaft sein! (Beispiel: Die Drehung einer Billardkugel kann einen wesentlichen Einfluss auf die Bahn haben! Der Reiz des Billardspiels!)
Aber bereits bei der Bewegung eines Teilchens kann man zwischen zwei
Auffassungen unterscheiden. Man kann sich zunächst dafür interessieren, wie
die Bewegung zu beschreiben ist (Kinematik), ohne dass man fragt, warum
sie so und nicht anders erfolgt. Die vom Teilchen beschriebene Bahn wird
dann als vorgegebene Kurve im Raum aufgefasst, die zunächst rein geometrisch untersucht wird. Aus der Untersuchung, wie sie vom Teilchen durchlaufen wird (wo es sich in verschiedenen Zeitpunkten befindet), also aus der
Bahnkurve
x(t)
~r(t) = x(t) ~e1 + y(t) ~e2 + z(t) ~e3 = y(t) ,
(1.1)
z(t)
erhält man weitere mechanische Charakteristika der Bewegung, z.B. die Geschwindigkeit
ẋ(t)
d
~v (t) := ~r(t) = ~r˙ (t) = ẋ(t) ~e1 + ẏ(t) ~e2 + ż(t) ~e3 = ẏ(t)
(1.2)
dt
ż(t)
und die Beschleunigung
ẍ(t)
d
~a(t) := ~v (t) = ~r¨(t) = ẍ(t) ~e1 + ÿ(t) ~e2 + z̈(t) ~e3 = ÿ(t) .
dt
z̈(t)
(1.3)
Hier beschreiben ~e1/2/3 Einheitsvektoren im kartesisches Koordinatensystem.
Hinweis: Um viel Schreibarbeit zu vermeiden und eine Verallgemeinerung in
beliebige Dimensionen zu erleichtern, bedient sich der Theoretiker oft einer
Kurzschreibweise. Z.B. für die Bahnkurve kann man schreiben
~r(t) = xi (t) ~ei ,
(1.4)
wobei man bei gleichen Indizes
immer eine Summe über alle Koordinaten
P3
ei , und hier sind x1 (t) ≡ x(t), x2 (t) ≡
versteht, also xi (t) ~ei ≡
i=1 xi (t) ~
y(t), x3 (t) ≡ z(t).
12
1.2. Wie sehen Newtons 3 Axiome aus?
Anstatt sich die Kinematik anzuschauen kann man sich für die Dynamik
interessieren, um die Ursachen zeitlicher Änderungen und damit der Bewegung überhaupt. Man fragt nach dem Warum und nimmt die Bahnkurve
nicht einfach als vorgegeben hin: man trachtet, sie aus möglichst einfachen
Ursachen zu berechnen. Es ist einleuchtend, dass die Kinematik eine Vorstufe zur Dynamik ist: man lernt aus ihr, auf welche Bestimmungstücke es
ankommt. Auch historisch war die Kinematik eine wesentliche Vorstufe:
Keplers Gesetze gaben eine rein kinematische Beschreibung der Planetenbewegung; erst mit Newtons Dynamik war es möglich, die Bewegung der Planeten (und anderer Himmelskörper) aus der Schwerkraft als universeller Ursache zu berechnen.
Achtung: Die vertraute Beschreibung der Bahnkurve (1.1) ist in
keiner Weise trivial!
Sie setzt ganz wesentliche Dinge voraus, nämlich ein Längenmessung, eine Zeitmessung und eine physikalische Annahme über die Struktur unseres
Raumes.
Die Längen- und Zeitmessung erfolgt durch die Festlegung eines Verfahrens zur Messung. Ein kartesischen Koordinatensystems (KS) existiert nur
im euklidischen oder ebenen Raum. Der Gegensatz dazu ist ein gekrümmter
Raum, definiert dadurch, dass in ihm kein kartesisches Koordinatensystem
möglich ist (Beispiel: zweidimensionaler Raum der Kugeloberfläche). Allerdings kann man im euklidischen Raum natürlich auch gekrümmte Koordinaten (wie Kugelkoordinaten oder Zylinderkoordinaten) verwenden, was wir
natürlich immer dann machen, wenn die physikalische Situation dadurch einfacher zu beschreiben ist, z.B. Bewegung einer Masse auf einer Kreisbahn.
1.2
Wie sehen Newtons 3 Axiome aus?
Jede physikalische Theorie muss von gewissen unbewiesenen, grundlegenden
Gesetzen ausgehen, die man aus (endlich) vielen Beobachten gewinnt. Durch
Vorhersagen kann das Gesetz verifiziert, aber nicht bewiesen werden. Durch
eine einziges Experiment kann es falsifiziert werden.
In der (klassischen) Mechanik können Newtons Axiome (mit einigen Ergänzungen) als Naturgesetze aufgefasst werden.
13
Kapitel 1. Newtonsche Mechanik
1. Axiom: Es existieren Bezugssysteme (BS), so genannte Inertialsysteme (IS), in denen die kräftefreie Bewegung durch
~r˙ (t) = ~v = const (daher: ~a = ~r¨ = 0) geschrieben werden
kann.
Es ist klar, dass die beobachteten Bewegungen vom spezifizierten BS abhängt:
Ein Billardspieler wird ganz andere Beobachtungen machen, wenn sich der
Tisch auf einem Karussell befindet.
Achtung: Natürlich kann man auch mit nicht IS arbeiten und das ist auch
oft der Fall (wir wohnen ja auf einem rotierenden Planeten), aber es treten
dann noch zusätzliche Kräfte auf (siehe Abschnitt 1.13)!
In einem IS sind die physikalischen Gesetze besonders einfach: die gleichförmige Bewegung oder Ruhe ist ein Zustand, in dem der Körper verharrt. Ohne
Kräfte bewegen sich die Körper also gleichförmig, d.h. die Integration von
˙
~r(t)
= ~v = const ergibt:
~r(t) = ~v t + ~r(0) .
(1.5)
Falls Kräfte gelten, dann führt dies zu einer nicht gleichförmigen Bewegung,
die zum 2. Axiom führt:
2. Axiom:
d(m ~v )
dt
=
d~
p
dt
:= F~ im IS
Es beinhaltet die Definition der Masse und Kraft als Messgrößen und weiters
die physikalische Aussage über die Bahnbewegung.
Achtung: Für Geschwindigkeiten vergleichbar mit der Lichtgeschwindigkeit
c gilt diese Axiom nicht, es ist falsifiziert (siehe Kapitel 3)! Aber da es für
weite Bereiche korrekte Vorhersagen macht, arbeitet man weiterhin damit,
es ist sozusagen nützlich und brauchbar.
Das letzte Axiom lautet:
14
1.3. Die Newtonschen Gleichungen im Detail
3. Axiom: Der Kraft, mit der die Umgebung auf einem Massenpunkt wirkt, entspricht stets eine gleich große, entgegengesetzte Kraft, mit der der Massenpunkt auf seine Umgebung
wirkt:
F~actio = −F~reactio
1.2.1
Zu Newtons Axiomen und ihren Zusätzen
Für Systeme aus Massenpunkten braucht man zusätzliche Annahmen über
die auftretenden Kräfte:
1. Zusatz: Die Kräfte, die zwischen zwei Massenpunkten auftreten, wirken entlang der Verbindungslinie:
(~r1 − ~r2 ) × F~12 = 0
2. Zusatz: Wirken mehrere Kräfte F~i auf einen Massenpunkt, so
ist die Gesamtkraft F~ die Summe der Einzelkräfte:
X
F~i
F~ =
i
Die Zusätze gelten beispielsweise für die Newtonschen Gravitationskräfte
oder die Coulombkräfte, sie schränken aber die möglichen Kraftansätze ein.
Magnetische Kräfte zwischen bewegten Ladungen verletzen Zusatz 1, nichtlineare elektromagnetische Feldeffekte in einem Medium verletzen Zusatz 2.
1.3
Die Newtonschen Gleichungen im Detail
Ausgangspunkt für die Dynamik in der von Newton gegebenen Form ist das
Trägheitsprinzip von Galilei:
Ein Körper, der eine konstante Geschwindigkeit hat, ändert diese nicht, sofern er keinen äußeren Einwirkungen unterliegt (Axiom 1).
Das wesentliche Neue an diesem Prinzip war, dass zur Aufrechterhaltung
15
Kapitel 1. Newtonsche Mechanik
einer (geradlinigen und gleichförmigen) Bewegung keine Ursachen notwendig sind. Diese sind nur erforderlich, wenn die Geschwindigkeit (nach Betrag
und/oder Richtung!!) geändert werden soll. Unserer Alltagserfahrung und
der der Schüler entspricht das nicht gerade, da z.B. eine Kugel sehr schnell
zur Ruhe kommt (natürlich meist auf Grund der Reibung).
Aber mit der Modernität kennen wir mittlerweile solche Situationen: es
ist bekannt, dass man den Raketenantrieb eines Raumschiffes nur zum Starten, Bremsen und Manövrieren braucht. Nach Brennschluss bewegt sich das
Raumschiff mit der zuletzt erreichten Geschwindigkeit weiter, ohne dass dafür
ein Antrieb nötig ist.
Zu Galileis Zeiten war ein beträchtliches Maß an Abstraktion nötig, um
diesen Zusammenhang zu erkennen: man kannte nur Bewegungen, die unter
dem Einfluss von Reibungskräften verlaufen, wodurch die Geschwindigkeit
verändert wird (wie meist in unserem Alltag); daher hatte man lange Zeit
hindurch (zurecht) geglaubt, dass auch zur Aufrechterhaltung von Bewegung
Kräfte nötig sind (wenn ein Wagen nicht vom Pferd gezogen wird, bleibt er
stehen).
Eine Dynamik wird daher so zu fassen sein, dass Kräfte als Ursache von
Geschwindigkeitsänderungen anzusehen sind. Um zu einer quantitativen Beziehung zu kommen, braucht man ein Maß für die Trägheit des Körpers, dessen Geschwindigkeit sich ändern soll: es ist einleuchtend, dass dieselbe Kraft
auf verschieden schwere Körper verschieden wirkt. Für ein Teilchen (das per
definitionem keine innere Struktur hat) sollte eine einzige Zahl als mechanisches Charakteristikum ausreichen, um seine Trägheit zu beschreiben. Wir
nennen sie die träge Masse m und nehmen zur Kenntnis, dass verschiedene
Teilchen durch verschiedene Massen unterschieden werden können.
Mit Newton benützen wir zur Formulierung der Dynamik anstelle der
Geschwindigkeit des Teilchens den Impuls
p~ = m~v .
(1.6)
Dass diese Größe zweckmäßiger ist, wird sich später zeigen (Seite 40).
Newtons Bewegungsgleichungen zur Bestimmung der Bahn ~r(t) lauten dann (vergleiche Axiome)
m ~r˙ (t) = p~ (t)
p~˙ (t) = F~
(1.7)
(1.8)
Die auf das Teilchen wirkende Kraft F~ kann als Ursache der Bewegung angesehen wird.
16
1.3. Die Newtonschen Gleichungen im Detail
Im Allgemeinen reicht es in der Mechanik anzunehmen, dass die Kraft F~
vom Ort ~r(t) und der Geschwindigkeit ~v (t) und manchmal auch explizit von
t abhängt oder mathematisch hingeschrieben:
F~ = F~ (~r(t), ~v (t), t) .
(1.9)
Man schließ damit zum Beispiel aus, dass die Kraft von der Beschleunigung
oder von höheren Ableitungen oder der Bewegung des Teilchens zu früheren Zeiten abhängt. Geschwindigkeitsabhängige Kräfte sind zum Beispiel die
Lorentzkraft, mit der wir uns noch beschäftigen werden, und die Reibungskraft.
Soll die Bahnkurve durch Lösung der Newtonschen Gleichungen berechnet
werden, so muss die Kraft als Funktion seiner Argumente bekannt sein. Die
Bestimmung der Bewegung ist damit auf die Ermittlung der Kraft zurückgeführt. Man kann dabei phänomenologisch vorgehen: man macht einen Ansatz für die Kraft und untersucht, welche Bahnen damit aus den Newtongleichungen herauskommen; stimmen sie mit beobachteten Bahnen überein, so
ist man zufrieden; andernfalls verändert man den Ansatz solange, bis Übereinstimmung erreicht wird. Damit erreicht man eine gewisse erkenntnistheoretische “Ökonomie”, da ein einziger Ansatz für F~ sehr viele verschiedene
Bewegungen als Konsequenzen hat.
Schon Newton hat erkannt, dass aus einem einzigen Ansatz für die Schwerkraft die Bahnen aller Himmelskörper des Sonnensystems folgen (wie praktisch)! Die Schwerkraft auf den durch ~r(t) beschriebenen Himmelskörper wird
dabei durch alle übrigen Himmelskörper hervorgerufen. Die Sonne dominiert
dabei so stark, dass es in sehr guter Näherung genügt, die von ihr ausgeübte
Schwerkraft zu betrachten. Das werden wir noch genauer in Abschnitt 1.9
untersuchen.
1.3.1
Die Mathematik hinter den Newtongleichungen
oder wie Theoretiker gerne analysieren
Mathematisch sind die Newtongleichungen (1.7) und (1.8) ein System von
Differentialgleichungen 1. Ordnung für 6 Funktionen (3 Komponenten von
~r (t), 3 von p~ (t)). Die Bahn ist dadurch in Termen von 6 Anfangswerten,
~r (t0 ) und p~ (t0 ), festgelegt. Im Allgemeinen sind diese Differentialgleichungen nichtlinear. Ein lineares System resultiert nur, wenn F~ eine Linearkombination von ~r und p~ ist, d.h. nur für einen sehr speziellen Kraftansatz
(Fällt jemandem dazu eine physikalische Situation ein?). Für die Schwerkraft F~ ∼ r13 ~r (oder Coloumbkraft) ist das System bereits nichtlinear.
17
Kapitel 1. Newtonsche Mechanik
Man kann natürlich die erste Gleichung (1.7) in die zweite (1.8) einsetzen
und erhält ein System von drei Differentialgleichungen 2. Ordnung für ~r(t):
F~ = m ~r¨(t)
Dies ist natürlich die bekannte Formel für die Kraft “Kraft=Masse×Beschleunigung”!
Eine Voraussetzung dafür ist, dass die Masse m konstant ist, sonst kann man
die erste Gleichung nicht in die zweite einsetzen! Nur unter dieser Bedingung
gilt diese Formel!
1.3.2
Und wenn der Theoretiker weiter in diesem Sinne analysiert: Newtonschen Gleichungen für N
Teilchen
Die Verallgemeinerung der Newtongleichungen für N Teilchen ist leicht anzugeben. Die Massen der Teilchen können voneinander verschieden sein, m(n) ,
ebenso kann auf jedes Teilchen n eine andere Kraft F~ (n) wirken. Damit haben
wir die folgenden zwei Gleichungen für N Teilchen:
m(n) ~r˙ (n) (t) = p~ (n) (t)
p~˙ (n) (t) = F~ (n)
(1.10)
(1.11)
wobei n = 1, 2, . . . , N das jeweilige Teilchen bezeichnet. Um die N Bahnkurven durch Lösung dieser Gleichungen bestimmen zu können, müssen alle
Kräfte als Funktionen der Koordinaten und Geschwindigkeiten und unter
Umständen auch explizit von der Zeit bekannt sein. Die Newtongleichungen
sind dann (wie für ein Teilchen) ein (i.a. nichtlineares) System von Differentialgleichungen erster Ordnung für 6N Funktionen. Die Bahnen werden
dadurch in Termen von 6N Anfangswerten festgelegt (3N Anfangsorte, 3N
Anfangsimpulse).
Sind alle Massen konstant, so kann man die zwei Gleichungen wieder in
3N Differentialgleichungen 2. Ordnung umschreiben
m(n)~r¨ (n) (t) = F~ (n) .
(1.12)
Für numerische Lösungsverfahren sind Differentialgleichungen 1. Ordnung
oft von Vorteil, sonst macht es natürlich keinen Unterschied.
Jedoch sehr wichtig für die Struktur der Gleichungen ist, von welchen
Variablen die Kräfte wirklich abhängen. Würde man annehmen, dass in F~ (n)
nur Ort und Geschwindigkeit des n–ten Teilchens (und allenfalls die Zeit t)
vorkommen, so wäre das unrealistisch. Man könnte dann das Teilsystem für
18
1.3. Die Newtonschen Gleichungen im Detail
(~p (n) , ~r (n) ) für jeden einzelnen Wert von n lösen, also jedes Teilchen separat
betrachten, ohne sich um die übrigen Werte N − 1 kümmern zu müssen. Die
Teilchen würden voneinander nichts spüren, jedes würde sich auf einer Bahnkurve bewegen, die davon unabhängig ist, ob die übrigen Teilchen überhaupt
vorhanden sind oder nicht. Statt eines Einteilchenproblems hätte man also
N Einteilchenprobleme formuliert, d.h. man würde damit nur die Bewegung
von Teilchen ohne Wechselwirkung erfassen, eine wirklich fade oder wie der
Theoretiker so gerne sagt “triviale” Situation.
In Wirklichkeit oder was uns mehr interessiert ist natürlich die Wechselwirkung der Teilchen untereinander: ein herausgegriffenes Teilchen (Nr. n)
erfährt Kräfte von allen übrigen, d.h.
F~ (n) = F~ (n) (~r (1) , ~r (2) , . . . , ~r (N ) ; p~ (1) , p~ (2) , . . . , p~ (N ) , t) .
(1.13)
Dadurch werden die Newtonschen Gleichungen zu einem gekoppelten System
von Differentialgleichungen: in den Gleichungen für (~r (n) , p~ (n) ) kommen über
F~ (n) alle übrigen Orts– und Geschwindigkeitsvektoren vor und umgekehrt;
man muss das System als Ganzes betrachten.
Die Kräfte sind in der Newtonschen Mechanik als die Ursachen aufzufassen, auf die die Bewegungen zurückgeführt werden kann. Wie bereits für
ein Teilchen festgestellt wurde, können die Kräfte nicht “berechnet” werden,
sondern man muss sie in Form eines Ansatzes für die funktionale Abhängigkeit von F~ (n) von seinen Variablen in die Bewegungsgleichungen “hineinstecken”. Der “richtige” Kraftansatz resultiert mitunter erst nach einem längeren Erkenntnisprozess, by trial and error. D.h. man untersucht die aus einem
bestimmten Ansatz folgenden Bewegungen durch Lösung der Newtonschen
Gleichungen, vergleicht das Resultat mit beobachteten Bewegungen und korrigiert den Ansatz so lange, bis Theorie und Experiment übereinstimmen.
Dadurch lernt man etwas über die Ursachen der Bewegung, also über den
Mechanismus, der einem Bewegungsphänomen zugrunde liegt. Das Ziel dieses Prozesses ist es, auf phänomenologischem Weg zu immer “tieferen” Ursachen vorzudringen. Ein Kraftansatz ist dabei als “besser”, “tiefer” anzusehen, wenn er in dem Sinn “allgemeiner” ist, dass aus weniger zugrunde
liegenden Annahmen mehr Konsequenzen gezogen werden können, wenn also mehr Phänomene auf weniger Ursachen zurückgeführt werden.
Albert Einstein formulierte das etwa so: “Eine Theorie ist umso eindrucksvoller, je größer die Einfachheit ihrer Prämissen ist, je verschiedenartigere
Dinge sie verknüpft und je weiter ihr Anwendungsbereich ist.”
Übungsaufgabe: Es gibt nur 4 fundamentale Kräfte oder Wechselwirkungen (nach derzeitigem Stand des Wissens), die die Moderne Physik kennt: die
19
Kapitel 1. Newtonsche Mechanik
starke, die schwache, die elektomagnetische Wechselwirkung und die Gravitation (die schwache und elektromagnetische Wechselwirkung kann zur einer
Theorie vereinheitlicht werden, die elektroschwache Wechselwirkung). Überlege wie die Herkunft der folgenden Kräfte erklärt werden kann: Muskelkraft, Zwangskräfte (z.B. Körper auf Tischplatte), Rückstellkräfte (z.B. Feder, Festkörper möchte nach Verformung in ursprünglichen Zustand zurück),
Haftreibung, Gleitreibung, Scheinkräfte (siehe auch Kapitel 1.13), Druckkräfte (z.B. Auftrieb),. . .
1.4
Was versteht man unter einem Feld?
Das Gravitationsgesetz
~r1 − ~r2
,
F~12 = G m1 m2
|~r1 − ~r2 |3
(1.14)
lässt sich auf zweierlei Art interpretieren: Einerseits kann man sich vorstellen, dass die auf m1 wirkende Kraft F12 den zwischen den Massenpunkten m1
und m2 befindlichen Raum einfach überspringt und direkt auf m1 wirkt (und
natürlich umgekehrt). Die Frage nach einem Mechanismus der Kraftübertragung wird hier nicht gestellt. Die zur Newtons Zeit vertretene Auffassung
hieß Fernwirkungstheorie. Eine moderne Auffassung der Kraftübertragung
ist beim Studium der elektromagnetischen Phänomene entwickelt worden,
die so genannte Nahwirkungstheorie und kann in gleicher Weise auch auf die
Newton Theorie angewendet werden. Hier erzeugt die Masse m2 ein Feld, ein
materiefreies Medium, im ganzen Raum. Es existiert auch falls m1 nicht vorhanden ist. Bringt man m1 aus dem Unendlichen in einen endlichen Abstand
zu m2 , so wird durch das Feld auf die Masse m1 eine Kraft F~12 ausgeübt.
Dabei gilt: Das von m2 erzeugte Feld existiert im ganzen unendlichen Raum,
eine Kraftwirkung aber nur an Stellen im Raum, an denen sich Massen befinden. Siehe auch Seite 66.
Noch eine sehr praktische Eigenschaft: Das Gravitationsfeld einer kugelförmigen Masse mit dem Radius R außerhalb des Körpers bleibt gleich,
wenn man sich das Volumen des Körpers unverändert, die Gesamtmasse jedoch im Kugelmittelpunkt konzentriert vorstellt. (Beweis: siehe Literatur)
20
1.5. Ist die Masse träger als schwer oder schwerer als träg?
1.5
Ist die Masse träger als schwer oder schwerer als träg?
Betrachten wir die fundamentalen Gleichungen der Mechanik, die Newtonsche Bewegungsgleichung (Index t für träge)
F~ = mt ~r¨
(1.15)
und das Gravitationsgesetz
~ 2 = G m2 ~r ,
G
|~r|3
~2 .
F~12 = m1 G
(1.16)
(1.17)
In allen 3 Gleichungen kommen Massen vor allerdings im Zusammenhang mit
verschiedenen Eigenschaften. In (1.15) kommt zum Ausdruck, dass sich die
Masse unter dem Einfluss einer Kraft bewegt, wobei diese Bewegung gewissermaßen “träge” erfolgt: Starke Änderungen von F~ übertragen sich direkt
nur auf ~r¨, nicht jedoch auf die durch zweimalige Integration “geglättete”
Bewegung ~r. Masse besitzt sozusagen Trägheit und mt ist die träge Masse.
Das ist aber nur eine Seite der Medaille! Nach (1.16) ist die Masse auch
“felderzeugend” (siehe Abschnitt 1.4). Darüber hinaus wird durch (1.17) auf
einen Massenpunkt durch das Feld eine Kraft übertragen. Ein Körper im Gravitationsfeld der Erde drückt mit einem Gewicht m ~g (~g . . . Erdbeschleunigung)
auf die Erdoberfläche. Diese Gewichtseigenschaft (“Schwere”) stellt demnach
eine zur Trägheit unterschiedliche Eigenschaft dar. Die 3 Gleichungen beschreiben jeweils unterschiedliche Eigenschaft (Trägheit, Fähigkeit zur Felderzeugung, Schwere).
Aufgrund des 3. Axioms, “actio=reactio”, können wir (1.16) und (1.17)
als gleichartig auffassen und haben damit
~r1 − ~r2
F~12 = G m1 m2
,
|~r1 − ~r2 |3
(1.18)
wobei hier m1/2 die schwere Masse ist. Aber sind diese zwei Arten von Massen
identisch?
Experimente finden keinen messbaren Unterschied zwischen träger Masse
und schwerer Masse! Daher kommen wir durch Angabe eines einzigen skalaren
Wertes m aus, wie praktisch!!
Im Rahmen der Newtonschen Mechanik und der Gravitationstheorie ist
die Gleichheit der Massen ein Zufall. Dagegen nimmt sie die Allgemeine Relativitätstheorie zum zentralen Ausgangspunkt (Einsteinsches Äquivalenzprinzip)!
21
Kapitel 1. Newtonsche Mechanik
1.6
Beispiele gegebener Kräfte à la Newton
Wir beschäftigen uns nun mit Problemen, die sich in einer Dimension darstellen lassen, und kommen so auf den sehr praktischen Begriff “Potential”.
Dieser bildet die Grundlage der Diskussion sehr vieler verschiedener physikalischer Situationen auf eine einfache und einheitliche Weise ohne auf zu
viele Details, die einer speziellen physikalischen Situation entsprechen, eingehen zu müssen.. . .
1.6.1
Ein Massenpunkt im homogenen Schwerefeld oder
im homogenen elektrischen Feld
Die Kraft ist in diesem Fall gegeben durch
F = m z̈ = −m g ,
(1.19)
wobei g die Erdbeschleunigung ist und in der Nähe der Erdoberfläche als
konstant angesetzt werden kann. Die Kraft ist also weder von Ort, noch Geschwindigkeit, noch Zeit abhängig. Einmal integrieren ergibt (Warum kürzt
sich die Masse heraus?)
vz (t) := ż = −g t + vz (0) ,
wobei vz (0) die Integrationskonstante, bzw. die Geschwindigkeit zum Zeitpunkt t = 0 ist. Ein weiteres Mal integrieren ergibt
g
z(t) = − t2 + vz (0) t + z(0) ,
2
wobei z(0) wieder die Integrationskonstante, bzw. der Ort des Massenpunktes
zum Zeitpunkt t = 0.
Ein analoger Kraftanzatz ist für die Beschreibung eines geladenen Teilchens in einem homogenen elektrischen Feld, wie gegeben zwischen den Platten eines geladenen Kondensators. Hier ist die Masse durch die Ladung zu
ersetzen und g durch den Betrag der elektrischen Feldstärke. Im Gegensatz
zur Masse kann die Ladung natürlich positive oder negativ sein, daher kann
es sich nach oben oder unten bewegen.
1.6.2
Freie Schwingung oder Federkraft
Stellen wir uns eine Feder mit einer Masse vor, die in der x–Richtung ausgelenkt wird. Hier ist die Kraft proportional zur Auslenkung x aus der Ruhelage
m ẍ(t) = −k x(t)
und k ist die Federkonstante, die im Experiment zu bestimmen ist.
22
(1.20)
1.6. Beispiele gegebener Kräfte à la Newton
Die Bewegungsgleichung ist eine homogene lineare1 (gewöhnliche) Differentialgleichung (siehe Mathematik Vorlesung), deren allgemeine Lösung eine
Linearkombination von zwei linear unabhängigen Lösungen ist, d.h.
x(t) = A cos(ω t) + B sin(ω t)
(1.21)
q
k
mit ω = m
. Das lässt sich sofort verifizieren, indem man diese Lösung zweimal nach t differenziert und in die obige Bewegungsgleichung einsetzt. Die
Integrationskonstanten A und B erhält man durch einsetzen der Anfangsbedingungen x(0) = x0 und ẋ(0) = v0 , also lautet die Lösung
v0
x(t) = x0 cos(ω t) +
sin(ω t) .
(1.22)
ω
Dass bei der Lösung der sin oder cos auftritt sollte uns nicht verwundern,
eine Masse die sich auf einer rotierenden Scheibe befindet und von der Seite
betrachtet wird, führt genau die Bewegung aus, die eine Masse an einer Feder
ausführt.
1.6.3
Was kann für Kräfte, die nur vom Ort abhängen,
ausgesagt werden?
Der Theoretiker: Können wir allgemeiner Aussagen über Kräfte treffen, die
nur vom Ort abhängen, wie die Federkraft?
Wir suchen also die Lösung für die folgende Bewegungsgleichung
m ẍ(t) = F (x(t)) .
(1.23)
Multiplizieren wir beide Seiten mit ẋ(t), so kann die obige Gleichung auch
so geschrieben werden
d
md
ẋ(t) = − U (x(t)) ,
(1.24)
2 dt
dt
wobei U eine Funktion nur vom Ort ist und gewöhnlich Potential oder potentielle Energie (ahha!) genannt wird und sich allgemein so schreiben lässt
Z
U (x) = − dx F (x) + const ,
(1.25)
1
Die Kraft hängt nur linear von x ab.
23
Kapitel 1. Newtonsche Mechanik
wobei die Integrationskonstante ohne Bedeutung für die Bewegungsgleichung
ist (fällt beim Differenzieren weg!). Umgekehrt errechnet man klarerweise bei
gegebenen Potential die Kraft durch
F (x) = −
d
U (x)
dx
(1.26)
oder im 3–dimensionalen Fall
~ (~r)
F~ (~r) = −gradU (~r) = ~ei ∇i U (~r) = ∇U
∂
U (~r)
∂x
∂
∂
U (~r) = ∂y U (~r) ,
= ~ei
∂xi
∂
U (~r)
∂z
(1.27)
worauf wir später näher darauf eingehen.
Integrieren wir nun die die Bewegungsgleichung (1.23) nach der Zeit, erhalten wir
m
ẋ(t)2 = −U (x(t)) + E.
2
(1.28)
Die Integrationskonstante E ist hier nichts anderes als die Summe der potenziellen Energie und —richtig!!— der kinetischen Energie! Damit haben wir
ganz allgemein gezeigt, dass für Kräfte die nur vom Ort abhängen und als
Gradient eines Potentials geschrieben werden können, die Energieerhaltung
gilt.
Lösen wir die obige Gleichung nach ẋ auf, erhalten wir
dt = q
dx
(1.29)
2(E−U (x))
m
und integrieren
Z
x
q
t − t0 =
x0
dx0
2(E−U (x0 ))
m
.
(1.30)
Mit den Anfangsbedingungen x(t0 ) und ẋ(t0 ) haben wir die Lösung t = t(x)
gefunden und damit implizit x = x(t).
Nur in sehr speziellen Fällen kann man das Integral analytisch lösen,
wie für den harmonischen Oszillator U (x) = kx2 /2, bzw. der Federkraft
d
U (x) = −F (x) = kx) oder das Potential U (r) ∼ 1r . Der harmonische
( dx
Oszillator ist übrigens das “Lieblingsobjekt” eines Theoretikers (warum?).
24
1.6. Beispiele gegebener Kräfte à la Newton
Der harmonische Oszillator und der Potentialbegriff
2
Für das harmonische
Potential U (x)√= kx
/2 wollen wir jetzt das Integral
R
√
2
(1.30) lösen ( 1/(1 − ax ) = arcsin ax/ a) und nach x auflösen mit x0 =
0, t0 = 0:
r
x(t) =
2E
sin(
k
r
k
t) = ω −1
m
r
2E
sin(ωt) .
m
(1.31)
Dies ist natürlich dieqgleiche Lösung wie (1.22) für die gegebenen Randbe, die Anfangsgeschwindigkeit bei t0 = 0.
dingungen und v0 = 2E
m
Die Geschwindigkeit erhalten wir durch Differenzieren
v(t) = ẋ(t) = v0 cos(ωt)
(1.32)
und damit lautet die Energieerhaltung für alle Zeiten t
m v(t)2 k x(t)2
+
= E = const .
2 } | {z
2 }
| {z
Ekin =
p(t)2
2m
(1.33)
U (x)
Dies legt eine andere Betrachtungsweise nahe, da die Gleichung allgemein als
eine Funktion vom Ort und Impuls aufgefasst werden kann, d.h.
H(x, p) = Ekin + U =
p2
k x2
+
.
2m
2
(1.34)
Hier ist H die berühmte Hamilton-Funktion. Fassen wir Ort und Impuls als
Koordinaten auf, ein solcher Raum wir dann Phasenraum genannt, dann beschreibt diese Formel für verschiedene Zeiten die Bahn im Phasenraum. Da
die Funktion in unserem Falle konstant ist, ergibt die Bahn eine Ellipse oder
einen Kreis, siehe Fig. 1.2 (mit geeigneter Skalierung kann man immer einen
Kreis erreichen). Damit kann der harmonische Oszillator auch charakterisiert werden. Man erkennt sehr schön die formale Symmetrie, nämlich eine
Drehsymmetrie im Phasenraum. Allgemein wird die Bewegung damit zur
Geometrie von Phasentrajektorien und führt zum Verständnis struktueller
Eigenschaften der zugrundeliegenden Theorie.
Wir werden in den Übungen auch den gedämpften harmonischen Oszillator berechnen und später nochmals auf die Hamilton-Funktion zurückkommen, die auch der Ausgangspunkt für die Quantenmechanik ist.
25
Kapitel 1. Newtonsche Mechanik
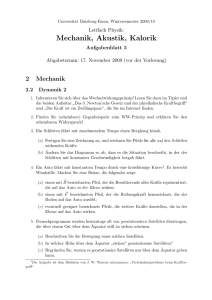
Abbildung 1.1: Die Lösungen des harmonischen
x(t), ẋ(t), Ekin (ẋ(t)), U (x(t)), E in Abhängigkeit der Zeit t.
Oszillators:
Wie behandelt man ortsabhängige Kräfte?
Ganz allgemein führt eine nur ortsabhängige Kraft zur Energieerhaltung und
damit zu der Möglichkeit einer graphischen Diskussion der Lösung. Diese Vorgehensweise ist auch bei komplizierteren Problemen eine bewährte Methode,
wie wir im Weiteren sehen werden.
1.7
Für welche Kräfte gilt die Energieerhaltung?
Starten wir mit der Newtonschen Bewegungsgleichung und multiplizieren
diese skalar mit ~r˙ , also
m ~r¨ · ~r˙ = F~ · ~r˙ ,
(1.35)
so können wir diese Gleichung auch in der Form
d m~r˙ 2
= F~ · ~r˙ = P ,
dt 2
26
(1.36)
1.7. Für welche Kräfte gilt die Energieerhaltung?
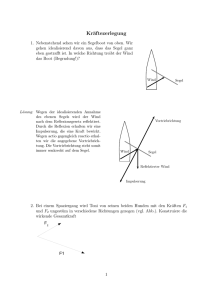
Abbildung 1.2: Der so genannte Phasenraum des harmonischen Oszillators:
Äußerste Kurve für E, innere für E/2. Wie ändert sich die Bahn eines Oszillators, falls E geändert wird?
27
Kapitel 1. Newtonsche Mechanik
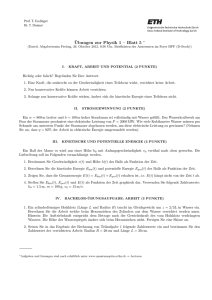
Abbildung 1.3: Die eindimensionale Bewegung eines Teilchens, das nur einer ortsabhängigen Kraft ausgesetzt ist, kann mit Hilfe des Energiesatzes
E = mẋ2 /2 + U (x) = const. graphisch diskutiert werden. Der vertikale Abstand zwischen U (x) und der Horizontalen E ergibt die kinetische Energie mẋ2 /2. Man kann weiters die Bewegungsrichtung wählen ẋ > 0 oder
< 0 und so die Änderung von ẋ2 anhand des vertikalen Abstandes ablesen. Die Schnittpunkte von E mit U (x) werden Umkehrpunkte genannt.
Warum? Verläuft die Bewegung zwischen zwei Umkehrpunkten kann dadurch
die Schwingungsdauer einer Periode bestimmt werden.
28
1.8. Warum macht es Sinn sich mit Potentialen “herumzuschlagen”?
wobei P klarer Weise eine skalare Größe ist und physikalisch nichts anderes
als die an das System übertragene Leistung. Teilen wir jetzt die Kraft in
einen so genannten konservativen und dissipativen Anteil auf (werden gleich
verstehen warum)
F~ = F~kons + F~diss ,
(1.37)
wobei wir den konservativen Anteil definieren durch alle Anteile der Kraft,
die sich auf die folgende Form bringen lassen:
d U (~r)
F~kons · ~r˙ = −
.
dt
(1.38)
Setzen wir diese Definition in die obigen Gleichungen ein, erhalten wir
Ã
!
d m~r˙ 2
+ U (~r)
= F~diss · ~r˙ .
(1.39)
dt
2
Daraus sieht man, haben wir keine dissipativen Kräfte, d.h. energieverlierenden Kräfte, nur konservative, energieerhaltende Kräfte ergibt sich der Energiesatz:
Kräfte konservativ −→
m~r˙ 2
+ U (~r) = E = konst.
2
(1.40)
Dissipative Kräfte führen also zur Umwandlung von mechanischer Energie
Ekin +U des betrachteten Teilchens in andere Energieformen, z.B. in Wärmeenergie.
Noch allgemeiner ist das Potential einer konservativen Kraft gegeben
durch
~ (~r) + ~r˙ × B(~
~ r, t) ,
F~kons = −∇U
(1.41)
~ ein beliebiges Vektorwie wir in Übungen nachprüfen werden. Hierbei ist B
feld, z.B. das Magnetfeld für ein geladenes Teilchen mit Geschwindigkeit ~r˙
( qc = 1 und damit die berühmte . . . . . . . . . -Kraft).
1.8
Warum macht es Sinn sich mit Potentialen “herumzuschlagen”?
Zusammenfassend können wir also “nur” konservative Kräfte durch ein Potential beschreiben, warum macht es trotzdem Sinn?
29
Kapitel 1. Newtonsche Mechanik
1. Die wichtigsten physikalische Kräfte sind konservative Kräfte (welche?).
Für diese Kräfte kann eigens eine andere Betrachtungsweise entwickelt
werden, beruhend auf der Potentialidee, einerseits der Hamilton– und
andererseits der Lagrange–Formalismus (siehe Kapitel 2). Wir werden
sehen, dass der Formalismus aber viel allgemeiner ist, man kann nicht
nur mechanische Systeme damit beschreiben, er ist die Grundlage, um
die z.B. die 4 Grundkräfte zu beschreiben.
2. Wir müssen für eine physikalische Situation nicht mehr ein Kraftanzatz erraten (einen Vektor!!), sondern nur einen Ansatz für das skalare
Potential U (~r), das eine skalare Größe ist und damit mathematisch
einfachere Größe als der Kraftvektor. Deswegen sind qualitative Überlegungen für U leichter durchzuführen als für F~ . Kennt man U für
ein System aus N Teilchen in der Umgebung einer bestimmten Stelle
(~r (1) , . . . , ~r (N ) ), so lässt sich der Verlauf von F~ (n) sofort angeben: die
Kraft zeigt in Richtung des steilsten Abfalls von U , mathematisch gerade gegeben durch Gradient (siehe auch Gl. (1.26))!! Natürlich ist ein
Preis dafür zu bezahlen: durch die Physik ist U nur bis auf eine Konstante bestimmt (= Integrationskonstante). Ändert man U um eine
Konstante U + C, so ändern sich die Bewegungsgleichungen nicht, weil
in ihnen nur die Kräfte = Gradienten des Potentials vorkommen und C
beim Differenzieren wegfällt. Die Änderung von U um eine Konstante
bedeutet, das man die Energie von einem anderen Wert an zählt. Die
Wahl des Energienullpunktes ist willkürlich. Sie hat keine Konsequenzen für die Newtonschen Bewegungsgleichungen, wie wir gesehen haben
und daher äquivalent zu den Newtonschen Bewegungsgleichungen.
3. Das “echte” skalare Potential U (~r), das man vielleicht gar nicht kennt,
kann man oft gut durch einen einfacheren funktionellen Zusammenhang
(z.B. harmonisches Potential) ersetzen und kann dann qualitative oft
erstaunlich gut die Physik des Problems beschreiben (z.B. graphische
Diskussion in Fig. (1.3)).
4. Der harmonischer Oszilator gibt für viele Potentiale und Probleme eine
erste, oft schon sehr gute Lösung.
5. In der Quantentheorie kann man ein Analogon zur Newtonkraft nicht
konstruieren, da auf Grund der Heisenbergschen Unschärferelation, wir
entweder den Ort genau bestimmen, dann ist aber der Impuls unscharf,
sogar noch schlimmer: unbestimmt, also nicht einmal prinzipiell durch
irgendeine Messung bestimmbar! Oder man bestimmt den Impuls genau, dann ist der Ort unbestimmt. Man muss also einen ganz anderen
30
1.9. Noch ein wichtiger Spezialfall: Zentralpotentiale und Kepler–Gesetze
Ansatz verfolgen, um die Bewegungsgleichung für Quantenteilchen aufstellen zu können, die berühmte Schrödingergleichung:
i~
d
ψ = Hψ
dt
(1.42)
wobei H die Hamiltonfunktion ist und meist durch
H =
p2
+ U (x)
2m
(1.43)
gegeben ist, wobei U (x) das Potential ist.
6. Aber es kommt in Zuge der Quantentheorie noch schlimmer: Schickt
man Elektronen durch einen Doppelspalt, deren Spalte so weit auseinander liegen, dass dahinter die beiden Elektronenwellen nicht überlappen können, also eine wellenfreie Region entsteht, und bringt man dort
eine sehr lange, dicht gewickelte Spule an. Diese erzeugt im Inneren
ein konstantes Magnetfeld, das Streufeld außerhalb kann verschwindend klein angenommen werden. Nach den Gesetzen der klassischen
~ das auf das elektronenfreie Gebiet
Physik kann dieses Magnetfeld B,
beschränkt ist, nicht die Bewegung der Elektronen beeinflussen. Quantenmechanisch beschreibt man das Magnetfeld durch das dazugehörige
~ dass außerhalb der Spule nicht Null ist, daher die
Vektorpotential A,
Bahn der Elektronen sehr wohl beeinflussen kann. 1959 schlugen Aharanov und Bohm dieses Experiment vor, das auch realisiert wurde. Das
Experiment zeigte, dass die Interferenzstreifen sich verschieben falls das
Magnetfeld einschaltet ist! Damit ist einerseits die quantenmechanische
Beschreibung die Richtigere, aber mehr noch das Potential muss in der
~ angesehen werQuantenphysik als fundamentaler als das Kraftfeld B
den! Es ist also nicht wie in der klassischen Physik und wie wir es hier
verwenden nur eine Hilfsgröße!
1.9
Noch ein wichtiger Spezialfall: Zentralpotentiale und Kepler–Gesetze
Allen sind die drei Kepler–Gesetze bekannt. Wir wollen sie hier als Folge der
Gravitationsanziehung mit Hilfe der in den vorigen Abschnitten erarbeiteten
Konzeptes des Potentials berechnen. Dabei werden wir bisweilen verallgemeinern, um erkennen zu können, welche spezielle Lösung von der Natur in
unserem Sonnensystem vorherrscht.
31
Kapitel 1. Newtonsche Mechanik
Das 1. Kepler–Gesetz lautet “Die Planeten bewegen sich auf Ellipsen mit
der Sonne in einem Brennpunkt”.
Wir haben es hier mit einem 2 Körperproblem (Sonne+Planet) zu tun. Wir
wählen den Koordinatenurspursprung im Massenmittelpunkt von Erde und
Sonne (das kann man immer tun, da die Schwerpunktbewegung und die Relativbewegung getrennt erhalten sind, was wir hier nicht beweisen). Somit
müssen wir uns nur mit den relative Koordinaten beschäftigen und haben
mM
die reduzierte Masse µ = m+M
einzusetzen, die aber bei Sonne und Planet
mM
im Wesentlichen m+M ≈ m ist, da m ¿ M .
Erfolgt die Bewegung in 3 Dimensionen reicht im Allgemeinen der Energiesatz für die analytische Lösung der Newtonschen Gleichungen nicht aus.
Die Integration gelingt allerdings, wenn auch der Drehimpuls
~ := ~r × p~
L
(1.44)
erhalten ist.
Multiplizieren wir die Bewegungsgleichungen für die Bahnkurve ~r(t) vektoriell mit ~r(t):
m ~r(t) × ~r¨(t) = ~r(t) × F~
(1.45)
~ durch
und definieren, das auf das Teilchen wirkende Drehmoment D
~ = ~r × F~
D
(1.46)
~ als auch D
~ ändern sich bei Verschiebung des Ursprungs,
(Achtung: Sowohl L
im Gegensatz zu F~ , p~) Da ~r˙ ×~r˙ immer Null ist, können wir die Gleichung (1.45)
so schreiben:
d~
~ .
L = D
(1.47)
dt
Die zeitliche Änderung des Drehimpulses ist also gleich dem Drehmoment.
Damit gilt, falls das Drehmoment verschwindet ist der Drehimpuls erhalten:
d~ ~
~
~ = (const)
~ = ~0 −→
L = 0 =⇒ L
.
(1.48)
D
dt
Für Kräfte F~ ungleich Null ist das Drehmoment nur Null, wenn die Kraft parallel oder antiparallel zu ~r ist, also muss die Kraft in Richtung zum Zentrum
des Bezugssystems wirken (oder entgegengesetzt). Für ein Teilchen unter dem
Einfluss einer so genannten Zentralkraft ist der Drehimpuls erhalten:
F~ k ± ~r −→
~ = ~0
D
−→
~
~ = (const)
L
(1.49)
Drehimpulserhaltung gilt daher für alle Potentiale die nur vom Betrag
von ~r abhängen.
32
1.9. Noch ein wichtiger Spezialfall: Zentralpotentiale und Kepler–Gesetze
Solche Potentiale, U = U (r), heißen Zentralpotentiale und ihre
Kraft ist gegeben durch
~ (r) = − ~r dU (r)
F~ = −∇U
r dr
(1.50)
und zeigt daher zum Zentrum (das wir als Ursprung unseres Koordinatensystems gewählt haben).
Falls der Drehimpuls erhalten ist, dann erfolgt die Bewegung immer in einer
Ebene. Wir haben damit zwei Erhaltungsgrößen
d
E = 0
dt
d~
L = 0.
dt
(1.51)
Betrachten wir zuerst den Drehimpulssatz. Erfolgt die Bewegung in der x, y–
Ebene
x(t)
px (t)
~r = y(t)
p~ = py (t) ,
(1.52)
0
0
dann zeigt der Drehimpuls in die z–Richtung. Für unser Problem werden
wir allgemein am besten die Zylinderkoordinaten bzw. Polarkoordinaten (zKoordinate ist ja Null) verwenden (sind dem Problem besser angepasst):
x(t) = r(t) cos(φ(t))
y(t) = r(t) sin(φ(t))
z(t) = 0
(1.53)
und damit sind die Geschwindigkeiten durch
ẋ(t) = ṙ(t) cos(φ(t)) − r(t) φ̇(t) sin(φ(t))
ẏ(t) = ṙ(t) sin(φ(t)) + r(t) φ̇(t) cos(φ(t))
(1.54)
gegeben. Dann ergibt sich der Betrag vom Drehimpuls zu (~r˙ 2 = ṙ2 + r2 φ̇2 )
~ = µ r2 φ̇
L = |L|
bzw. φ̇ =
L
,
µ r2
(1.55)
der so genannte Zentrifugalterm (warum?) und damit haben wir die folgende
Energieerhaltung (der Relativbewegung)
E=
µ ṙ2
µ ~r˙ 2
+ U (r) =
+ Uef f (r)
2
2
33
(1.56)
Kapitel 1. Newtonsche Mechanik
mit
L2
+ U (r) .
2µr2
Uef f (r) =
(1.57)
Das Gravitationspotential ist mit U (r) = − αr gegeben, wobei α = GM m,
1 q2
falls wir das Coulombpotential betrachten würden, dann wäre α = −q
.
4πε0
Weiters ist es ein 1–dimensionales Problem (Bewegung erfolgt in einer
Ebene), das heißt wir können es genauso behandeln, wie in Abschnitt 1.6. Wir
erhalten also ganz analog zu Gleichung (1.29) die Lösungen der Newtonschen
Bewegungsgleichungen durch
Z r
dr0
q
t − t0 =
,
(1.58)
0
r0 =r(t0 )
2(E−U (r ))
µ
welches als Inverses r(t) liefert und durch Integration von φ̇ =
L
dφ =
µ
Z
t
t0
dt0
,
r(t0 )2
φ0 = φ(t0 ) ,
L
,
µr2
also
(1.59)
erhält man φ(t). Damit haben wir dann die Bahnkurve (1.53) durch r(t) und
φ(t) bestimmt.
Wir interessieren uns im Folgenden nicht für die Zeitabhängigkeit direkt,
sondern mehr für die Form der Bahn (Kreis, Ellipse,. . . ), daher wählen wir
eine andere Parameterdarstellung und zwar wollen wir r(φ) bestimmen und
haben damit die Lösung in der Form (vergleiche mit (1.53)):
x(φ) = r(φ) cos(φ)
y(φ) = r(φ) sin(φ) .
(1.60)
Aus
√
q
2µ 2
r E − Uef f (r)
L
Z r
L
dr0
p
=⇒ φ − φ0 = √
,
2µ r0 r02 E − Uef f (r0 )
ṙ
dr
= =
dφ
φ̇
(1.61)
geben.
Die Newtonschen Bewegungsgleichungen lassen sich sogar analytisch Lösen,
allerdings gibt es eine elegantere Methode and die Bahnformen heranzukommen, die auch einen tieferen Einblick in die Physik des Problems gibt, den
wir daher hier wählen.
34
1.9. Noch ein wichtiger Spezialfall: Zentralpotentiale und Kepler–Gesetze
Schauen wir uns eine endliche Bewegung an, d.h. eine, bei der sich das
Teilchen in einem endlichen Raumgebiet bewegt. Damit eine solche Bewegung
möglich ist, muss es (mindestens) einen oberen und einen unteren Umkehrpunkt geben, die wir r> bzw. r< nennen. Für den unteren Umkehrpunkt r<
sorgt falls L 6= 0 im Allgemeinen das Zentrifugalpotential (warum?). Damit
es einen oberen Umkehrpunkt gibt, muss das effektive Potential für r > r<
(mindestens) ein Minimum haben. Eine endliche Bewegung wird auftreten,
wenn E richtig liegt (und die weiteren Details ergeben sich durch die Besonderheiten des exakten Potentialverlaufs), siehe Fig. 1.4.
Abbildung 1.4: Potential (hier U = V ) für radialsymmetrische Zentralpotentiale.
Für radialsymmetrische Zentralpontentiale verläuft die Bahnkurve zwischen zwei Kreisen mit den Radien r< (für Planeten heißt dieser Kreis Perihel) bzw. r> (für Planeten heißt dieser Kreis Aphel) und hat entweder die
Form einer Rosette oder einer Maanderkurve, vgl. Fig. 1.5.
Abbildung 1.5: Eine Rosettenbahn oder eine Mäanderbahn.
Wie man sieht ist eine Kreisbahn nur für sehr spezielle Werte von E und
35
Kapitel 1. Newtonsche Mechanik
~ möglich, nämlich dann wenn E = min Uef f entspricht, dann fallen die
|L|
zwei Umkehrpunkte r< und r> zusammen.
Wie kommt man jetzt zu den Keplerbahnen. Wir wissen die Bahnen sind
~
geschlossen. Es muss noch eine weiter Erhaltungsgrößen geben (außer E, L),
da wir wissen, dass die Bahn sich nicht dreht, d.h. wir suchen nach einer
Größe, deren Zeitkonstanz eine Drehung der Rosette verhindert. Was kann
das für ein Vektor sein?
Er wir in der Bahnebene zu suchen sein (also in der x, y–Ebene). Als
~ d (~r × L)
~ zur Verfügung. Die
“Kandidaten” haben wir nur ~r, p~, ~r × L,
dt
Zeitableitungen von Ort und Impuls kommen direkt in den Newtonschen
Bewegungsgleichungen vor, haben wir also schon behandelt. Bleibt also nur
der letzte Kandidat, seine Zeitableitung ergibt
d
~ = −∇U
~ (r) × L
~ = − α ~r × L
~
p~ × L
dt
r3
α
1
=
(~p − 2 ~r · (~r · p~)) .
r
r
(1.62)
Betrachten wir die Zeitableitung von
µα ·
d ~r
α
1
= (~p − 2 ~r · (~r · p~)) .
dt r
r
r
(1.63)
Beide Ausdrücke sind gleich, d.h. die Differenz ist Null und damit ist der
entsprechende Vektor
~ = p~ × L
~ − µα ~r
A
r
(1.64)
~ = 0 und wird Lenz–Runge–Vektor genannt.
zeitlich erhalten dtd A
~ ist es egal, an welchem Punkt der Bahn wir
Für die Berechnung von A
beginnen, wählen wir die x–Achse, dann folgt
36
1.9. Noch ein wichtiger Spezialfall: Zentralpotentiale und Kepler–Gesetze
~ · ~r = A r · cos φ
A
(1.65)
~ · ~r = L2 − µαr .
A
(1.66)
und
Durch Gleichsetzen beider Gleichung erhalten wir
2
A r · cos φ = L − µαr
=⇒
r(φ) =
1+
L2
µα
A
cos φ
µα
(1.67)
und damit die gesuchte Lösung für (1.60).
Wenn wir die Parameterdarstellungen von Kegelschnitten (Brennpunkt
im Ursprung), Fig. 1.6, betrachten, erkennen wir,—abhängig von den Werten
von E, L— ergeben sich unterschiedliche Lösungen. Ein Vergleich ergibt den
folgenden Halbparameter und die folgende Exzentrizität
L2
µα
A
ε =
µα
p =
(1.68)
• Betrachten wir den Fall α > 0, also eine anziehende Wechselwirkung
(Gravitation oder Coulombkraft mit q1 q2 < 0). Dann gilt p ≥ 0 und
ε ≥ 0 und wir haben (vgl. Fig. 1.6)
ε
0
ε
ε
=
<
=
>
0 . . . Kreis
ε < 1 . . . Ellipse
1 . . . Parabel
1 . . . Hyperbel
• Betrachten wir den Fall α < 0, also eine abstoßende Wechselwirkung
(Coulombkraft mit q1 q2 > 0), dann erhalten wir den folgenden Kegelschnitt (vgl. Fig. 1.6)
r(φ) =
|p|
.
−1 + |ε| cos φ
(1.69)
Natürlich muss der Radius positiv sein, daher −1 + |ε| cos φ > 0 und
das ist nur für |ε| > 1 der Fall. Damit haben wir eine Hyperbel Lösung.
37
Kapitel 1. Newtonsche Mechanik
Abbildung 1.6: Kegelschnitte
38
1.10. Weitere Erhaltungssätze
Welche Lösung gilt für das System Erde–Sonne?
Dazu müssen wir den Betrag vom Lenz–Runge Vektor bestimmen, dieser
ergibt mit
~ 2 = p~ 2 L2 ;
(~p × L)
und ~r˙ 2 = ṙ2 +
~ = (~r × p~) · L
~ = L2
~r · (~p × L)
L2
µ2 r2
p
µ2 α2 + 2µEL2 .
(1.70)
q
2
A
Damit haben wir die Exzentrizität ε = µα
= 1 + 2EL
durch die Gesamtµα2
energie und den Drehimpuls ausgedrückt.
Für eine gebundene Bewegung muss die Energie E negativ sein, der Ausdruck unter der Wurzel muss natürlich positiv sein
~ =
A = |A|
E≥
−µα2
= E min
2L2
(1.71)
und damit gilt
E min ≤ E < 0
⇔
0≤ε<1
(1.72)
und unsere Lösung ist eine Ellipse falls die Gesamtenergie nicht gleich E min
ist. Unter welchen Umständen wäre das der Fall?
1.10
Weitere Erhaltungssätze
Wie bereits bemerkt sind die Newtonschen Gleichungen nur in Ausnahmefällen (Beispiele?) linear. Eine allgemeine analytische Lösung ist daher
in der Regel nicht möglich. Unter Umständen, d.h. für bestimmte Kraftypen
kann man eine Lösung erhalten, wenn es gelingt aus Ort und Impuls Größen
zu konstruieren, die von der Zeit unabhängig sind (so genannte Erhaltungsgrößen), wie zum Beispiel der Drehimpuls, die Energie oder der Lenz–Runge–
Vektor. Hier befassen wir uns damit, welche es noch gibt?
Betrachten wir System von N Teilchen mit konstanten Massen. Für ein
einzelnes Teilchen n ist der Impuls p~ n nur erhalten, wenn die entsprechende
Kraft F~ (n) verschwindet. Nicht besonders interessant, aber wenn wir alle N
Teilchen betrachten, erhalten wir die folgende zweite Newtonsche Gleichung
N
X
n=1
p~˙ (n) =
N
N
X
d X (n)
p~
=
F~
dt n=1
n=1
39
(n)
.
(1.73)
Kapitel 1. Newtonsche Mechanik
Wir nennen die Summe der Impulse aller Teilchen den Gesamtimpuls
P~ =
N
X
p~
(n)
=
n=1
N
X
m (n) ~v (n)
(1.74)
n=1
und es gilt offenbar, falls die Kräfte einander insgesamt aufheben:
N
X
F~
(n)
= 0
=⇒
P~ = const.
(1.75)
n=1
Man sieht hier auch gleich, warum der Begriff des Impulses eines Teilchens
ein besseres Konzept als die Geschwindigkeit ist: die Summe der Geschwindigkeiten aller Teilchen ist nur dann erhalten, falls alle Teilchen die gleiche
Masse haben!
Die Erhaltung des Gesamtimpulses entspricht dem 3. Axiom: teilen wir
das System in zwei Teile, wobei das eine Teilsystem aus Teilchen Nr.1 bis Nr.k
besteht und das zweite aus den restlichen N −k Teilchen besteht, so bedeutet
das Verschwinden der Gesamtkraft, dass die Kraft auf das eine Teilsystem
genau entgegengesetzt gleich derjenigen ist, die auf das andere Teilsystem
wirkt. Der Erhaltungssatz für den Gesamtimpuls ist also gleichbedeutend
mit dem Verschwinden der Gesamtkraft und bildet ein Kriterium dafür, dass
das betrachtete System abgeschlossen, also als isoliert von der übrigen Welt
betrachtet werden kann.
Stellt man fest, dass für ein konkretes System der Erhaltungssatz nicht
gilt, dann kann man in der Regel darauf schließen, dass das System nicht
abgeschlossen ist. In der Teilchenphysik hat es dazu geführt, dass noch unbekannte Teilchen vorausgesagt wurden, die man später auch tatsächlich gefunden hat.
Aus der Erhaltung des Gesamtimpulses kann ein weiter wichtiger Satz
gefolgert werden. Definieren wir die Gesamtmasse unseres Systems durch
M =
N
X
m (n) ,
(1.76)
n=1
dann kann man den Gesamtimpuls so schreiben
P~ := M V~ ,
(1.77)
wobei der Geschwindigkeitsvektor V~ konstant ist (Gesamtimpuls ist ja konstant) und durch
V~
=
N
N
1 X (n) (n)
d 1 X (n) (n)
d ~
R
m ~v
=
m ~r
=:
M n=1
dt M n=1
dt
40
(1.78)
1.11. Schwarze Löcher
gegeben ist. Die auf der rechten Seite auftretende Größe ist der Ortsvektor
des Schwerpunktes des Systems. V~ ist die Geschwindigkeit, mit der sich der
Schwerpunkt bewegt. Da V~ konstant ist, können wir einfach integrieren und
erhalten
~ = R
~ 0 + V~ t .
R
(1.79)
Der Schwerpunkt bewegt sich daher geradlinig und gleichförmig, das ist der
Schwerpunktsatz.
1.11
Schwarze Löcher
Kann man Schwarze Löcher mit Hilfe von der Newtonschen Mechanik verstehen? Betrachten wir mal die Kenngrößen unserer Sonne, sie hat eine Masse
M = 1.99 · 1030 kg und einen Radius von R = 6.96 · 108 m und ist damit viel
viel größer als irgendein Planet, aber verglichen mit anderen Sonnen (Sternen) ist sie im guten Mittelfeld. Betrachten wir die Fluchtgeschwindigkeit
eines Körpers von der Sonne (siehe auch Übungen), dann gilt
r
v =
2GM
R
und hängt damit nur von der Masse und Radius der Sonne ab. An der Oberfläche der Sonne beträgt v = 6.18 · 105 m/s oder 1/500 der Lichtgeschwindigkeit c.
Halten wir jetzt die Masse fest und variieren den Radius, so folgt für
Sonnen, die einen ≈ 500 kleineren Radius haben als unsere Sonne, dass die
Fluchtgeschwindigkeit gleich c ist. Das hat 1783 Rev. John Mitchell erkannt.
Damit wurde die Idee eines schwarzen Loches geboren oder eines Objektes,
“das das gesamte Licht wieder einfangen würde”. Aus unseren Überlegungen
folgt also, dass, wenn wir in der obigen Gleichung v = c setzen, erhalten wir
, bei dem der Körper kein Licht mehr hergibt. Aber
den Radius RS = 2GM
c2
ist das korrekt?
Die Allgemeine Relativitätstheorie ergibt den gleichen Schwarzschildradius, gefunden 1916 vom Herrn Karl Schwarzschild. Wie ist das möglich?
Bei unserer Rechnung haben sich zwei Fehler kompensiert, einerseits ist die
kinetische Energie von Licht nicht mc2 /2 (sondern?) und das Gravitationspotential in der Nähe eines schwarzen Loches ist nicht U (r) = − αr .
41
Kapitel 1. Newtonsche Mechanik
1.12
Welches Raum-Zeit Konzept steckt hinter den Newtonschen Gleichungen?
Hier wollen wir uns damit befassen, welche Geometrie der “Newtonschen
Welt” zu Grunde liegt, in der die Bewegungsgleichungen formuliert wurden.
Zunächst haben wir mal ein vierdimensionale Welt vor uns, genauer eine
vierdimensionale Mannigfaltigkeit (t, ~r) (manche moderne Theorien gehen
durchaus davon aus, das es noch extra Dimensionen gibt, aber eindeutige
Beweise dafür gibt es noch nicht). Eine n–dimensionale Mannigfaltigkeit ist
ein Gebilde, das sich durch ein Koordinatensystem überdecken lässt, oder
anders ausgedrückt, sich lokal, also im Kleinen, wie der Rn (R . . . reelle
Zahlen) aussehen. Entspricht also unserem aus dem Alltag und der Schule geprägtem Bild unserer Welt. Der Punkt ist, dass im Großen die Gestalt
jedoch beliebig kompliziert sein kann, z.B. eine Kugel (Sphäre), ein Torus,
ein Möbiusband, eine Brezelfläche,. . . . Die Mannigfaltigkeit kann man sich
also aus lauter Punkten aufgebaut denken, wobei in jedem Punkt ein (z.B.
kartesisches) Koordinatensystem mit einer Uhr angebracht ist.
Prinzipiell erhält man Auskunft über die Struktur von Raum und Zeit,
indem man mit physikalischen Maßstäben und Uhren misst und aus den
Messdaten ein Koordinatennetz errichtet. Ob die erhaltenen Mannigfaltigkeit
euklidisch ist oder nicht, hängt von den physikalischen Gegebenheiten ab
(Beispiel einer nichteuklidischen Welt: z.B. beheizte Platte).
Solange man nur die Bewegung freier Teilchen betrachtet, sind die Galileitransformationen (siehe unten) nur Änderungen der mathematischen Beschreibung ohne Änderung der beschriebenen Physik (verschiedene Beobachter benützen nur unterschiedliche Koordinaten und beobachten das gleiche
Phänomen). Aber die Annahme, dass diese Eigenschaft auch dann noch gelten soll, wenn wir wechselwirkende Teilchen betrachten, erscheint sehr plausibel und entspricht auch der Struktur der Newtonschen Gleichungen, sie
ist aber eine nicht–triviale Hypothese und hat als Konsequenz, die Existenz
eines absoluten Raumes und einer absoluten Zeit.
Wie kommt man auf die Transformationen: Eine Lehrkraft führt
einen Versuch durch, bei dem die Bahn eines Teilchens aufgezeichnet wird.
Bob, der Eigenbrötler, besteht darauf sich ein anderes IS auszusuchen und
außerdem ist er auch noch ein Besserwisser und behauptet, dass für beliebige
IS das Relativitätsprinzip von Galilei gilt: “Alle IS sind gleichwertig”, also
darf ich mir auch ein Eigenes aussuchen! “Na gut”, sagt Anna und nimmt die
Herausforderung an. Beide beobachten die Bahn eines kräftefreien Teilchens,
Anna in ihrem KS (x, y, z, t) und Bob in seinem KS’ (x0 , y 0 , z 0 , t0 ). Anna findet
42
1.12. Welches Raum-Zeit Konzept steckt hinter den Newtonschen
Gleichungen?
folgende Bewegungsgleichungen
m ~r¨(t) = 0 ,
(1.80)
m ~r¨ 0 (t0 ) = 0 ,
(1.81)
und Bob diese
Beide haben sich ein IS ausgesucht (woran erkennt man das?). Um beide
Ergebnisse vergleichen zu können, muss man den Zusammenhang zwischen
den ungestrichenen und gestrichenen Koordinaten bestimmen, das führt dann
zu den berühmten Galileitransformationen.
Seien die beiden Koordinatensysteme wie in der folgenden Graphik gewählt,
also parallele Achsen und damit gleiche Basisvektoren und t0 = 0:
Der Ortsvektor eines bestimmten Massenpunktes P sei ~r = xi ~ei in IS und
0
0
~r = xi ~ei und der Zusammenhang ist
0
~ .
~r(t) = ~r (t) + d(t)
(1.82)
Betrachten wir ein kräftefreies Teilchen in IS, dann erhalten wir:
0
~¨ .
m ~r¨(t) = 0 = m ~r¨ (t) + m d(t)
(1.83)
Das neue Bezugssystem ist genau dann ein IS falls m ~r¨ (t) = 0 und damit
folgt
0
~¨ = ~0
d(t)
−→
~
d(t)
= ~v t + ~b ,
(1.84)
wobei ~b ein konstanter Vektor ist. Das bedeutet, dass sich IS’ gegenüber IS
mit konstanter Geschwindigkeit bewegt und um einen konstanten Vektor ~b
43
Kapitel 1. Newtonsche Mechanik
verschoben sein kann. Damit haben wir die Galileitransformationen hergeleitet:
0
~r = ~r − ~v t − ~b
(1.85)
t0 = t − t0 .
(1.86)
Bei Verwendung dieser Transformation bleiben Newtonsbewegungsgleichungen forminvariant oder kovariant, bzw. ändern ihre Form nicht. Galileis Relativitätsprinzip postuliert diese Kovarianz für alle grundlegenden Gesetze.
Wir haben bei der Herleitung nur eine beliebige Bewegung des Ursprungs
in Betracht gezogen, natürlich kann man auch zu einander konstant verdrehte Koordinatensysteme betrachten (zeitabhängige Rotationen würden zu Zusatztermen führen, siehe nächster Abschnitt 1.13).
Die allgemeinen Galileitransformationen lautet damit:
0
~r (t) = R ~r(t) − ~v t − ~b
t0 = t − t0 .
(1.87)
(1.88)
Sie setzt sich daher aus folgenden Transformationen zusammen:
1. Einer räumlichen Verschiebung um einen konstanten Vektor
~b,
2. einer räumlichen Verschiebung um ~v t,
3. einer Rotation, beschrieben durch die Rotationsmatrix R,
R RT = 1,
4. und einer konstanten zeitlichen Verschiebung um t0 .
Die Galileitransformationen hängt damit von 10 Parametern ab: Die Drehung wird zum Beispiel durch 3 Winkeln oder der Einheitsdrehachse plus
einem Winkel 2 + 1 = 3 beschrieben; dazu kommen dann 3 Parameter von
der Relativgeschwindigkeit ~v , 3 Parameter vom Verschiebungsvektor ~b und 1
Parameter von der Verschiebung der Zeit um t0 .
Zwei hintereinander durchgeführte Galileitransformationen IS zu IS’ und
IS’ zu IS” führen wieder zu einen IS”, sie definieren eine neue Galileitransformation von IS zu IS”. Natürlich gibt es auch die triviale Transformation von
IS zu IS. Damit bilden die Galileitransformationen ein Gruppe, sie wir auch
Galileigruppe genannt. Das interessante ist meist die Relativebewegung verschiedener IS und die kann man praktischer Weise auch nur in eine Koordinate legen, diese Transformationen, werden als spezielle Galileitransformation
bezeichnet.
44
1.13. Beschleunigte Bezugssysteme
Wann gelten die Galileitransformationen? Dieser Frage werden wir uns
dann später nochmals widmen.
1.13
Beschleunigte Bezugssysteme
Inertialsysteme (IS) haben wir dadurch definiert, dass in ihnen Newtons
Axiome gelten. Nicht IS sind also Systeme, die relative zu einem IS beschleunigt sind, es treten Zusatzterme auf, so genannte Trägheits- oder Scheinkräfte.
Achtung: Der Name Scheinkraft darf hier nicht missverstanden werden.
In beschleunigten Bezugssystemen (BS) sind diese Kräfte wirklich vorhanden
(also wirklich spürbar!). Sie unterscheiden sich von den “echten” Kräften aber
dadurch, dass sie durch den Übergang zu einem IS wegtransformiert werden
können.
Nicht-IS sind aber nicht unnötig oder gar unbrauchbar, falls sich der Beobachter in einem beschleunigten BS befindet, möchte dieser seine Beobachtungen natürlich von diesem System aus verstehen können. Wir bestimmen
hier die Zusatzterme, die auftreten falls wir zu eine IS linear beschleunigtes
BS oder ein rotiertes BS betrachten.
1.13.1
Linear beschleunigtes Bezugssystem
~
Unsere BS sei ein zu IS konstant in Richtung d(t)
= ~a2 t2 ; ~a = const.
beschleunigtes System, d.h. ein Ortsvektor in IS hat den Zusammenhang mit
dem BS durch:
~a
0
0
~
~r (t) = ~r (t) + d(t)
= ~r (t) + t2 .
2
(1.89)
Aus 1. Axiom folgt für die Bewegungsgleichung eines kräftefreien Teilchens
m ~r¨(t) =; 0 im IS und damit
0
m ~r¨ (t) = 0 = m ~r¨ (t) + m ~a
0
=⇒ m ~r¨ (t) = −m ~a im BS’ .
(1.90)
Der Zusatzterm auf der rechten Seite bedeutet, dass Newtons 1. Axiom im
BS’ (betrachten ja ein kräftefreies Teilchen) nicht gilt und entspricht einem
konstanten Kraftfeld, wenn wir die Bewegungsgleichung im BS’ mit der Form
des 2. Axioms vergleichen und werden daher Trägheitskräfte genannt. Ein
Beispiel sind die Kräfte, die ein Passagier im Flugzeug spürt.
Beispiel: “Beschleunigungsmesser”
45
Kapitel 1. Newtonsche Mechanik
Moderne Theorie “Allgemeine Relativitätstheorie”: Wie erwähnt
geht Einstein von der Äquivalenz von schwerer und träger Masse aus (siehe auch Abschnitt 1.5) und damit von der Äquivalenz von Trägheits– und
Gravitationskräften aus. Die Grundidee ist in etwa so: In einem lokal frei–
fallenden BS, also einem konstant beschleunigten BS (z.B. Satelliten–Labor)
laufen alle Prozesse so ab, als gäbe es keine Gravitation. Ausgehend von den
gewonnenen Gesetzen ohne Gravitation kann man durch Transformation zum
betrachteten BS, z.B. einem Labor auf der Erde, die entsprechenden Gesetze
mit Gravitation erhalten. Allerdings gibt es einen entscheidenden Unterschied
zu dem hier betrachteten Beispiel, Beschleunigungen sind im realen Gravitationsfeld ortsabhängig und man muss natürlich die relativistischen Gesetze
betrachten.
1.13.2
Rotierende Bezugssysteme
Da unsere Erde ein solches BS ist, ist dieser Fall von besonderen Interesse. Betrachten wir ein gegenüber einem IS mit der Winkelgeschwindigkeit ω
~
rotiertes BS’. Betrachten wir zunächst einen Vektor V~ , der vom BS’ aus gesehen zeitunabhängig ist, er soll konstante Länge haben und bildet konstante
Winkeln mit den Koordinatenachsen (oder Drehachsen).
Aus der obigen Abbildung kann man sehen, dass für die Änderung dieses
Vektors aufgrund der Rotation von BS’ gilt
|dV~rot | = |V~ | |d~
ϕ| sin θ, dV~rot ⊥ ω
~ , dV~rot ⊥ V~
(1.91)
und damit folgt
dV~rot = d~
ϕ × V~ = (~ω dt) × V~ .
(1.92)
Nun lassen wir den Vektor V~ von der Zeit abhängen. Im BS’ ändert er sich
während dt um dV~BS 0 und damit ist die Änderung von diesem Vektor aus IS
betrachtet
dV~IS = dV~BS 0 + dV~rot .
46
(1.93)
1.13. Beschleunigte Bezugssysteme
Mit der obigen Beziehung erhalten wir also
Ã
dV~
dt
!
Ã
=
IS
dV~
dt
!
+ω
~ × V~ .
(1.94)
BS 0
Jeder Ortsvektor eines Massenpunktes kann nach den Basisvektoren ~ei
von IS entwickelt werden, aber natürlich auch in den Basisvektoren ~e 0i (t) des
rotierten BS’
~r (t) =
3
X
xi (t) ~ei =
i=1
3
X
x0i (t) ~e 0i (t) .
(1.95)
i=1
Da wir voraussetzen, dass der Koordinatenursprung beider Systeme gleich
ist und wir Ortsvektoren betrachten, gilt ~r = ~r 0 . Die Basisvektoren des rotierten BS’ hängen von der Zeit ab, die aus IS nicht. Berechnen wir nun die
Geschwindigkeit, erhält man nach der Kettenregel
3
3
X
X
dx0i (t) 0
d~e 0i (t)
0
˙~r = d~r =
~ei (t) +
xi (t)
dt
dt
dt
i=1
i=1
= ~r˙ 0 + ω
~ × ~r 0 .
(1.96)
Wir wollen jetzt die Bewegungsgleichung eines kräftefreien Teilchens in
BS’ betrachten und beschränken uns auf eine Rotation mit konstanter Winkelgeschwindigkeit ω
~ = const. Dazu wenden wir Gl. 1.94 auf den Geschwin˙
digkeitsvektor ~r an und erhalten schlussendlich
Ã
d~r˙
dt
!
= r̈0 + 2 ω
~ × ~r˙ 0 + ω × (ω × ~r 0 ) .
IS
47
(1.97)
Kapitel 1. Newtonsche Mechanik
Damit haben wir hergeleitet, dass für ein kräftefreies Teilchen im
IS, also
µ 2 ¶
d ~r
¨
m ~r =
= 0,
(1.98)
dt2 IS
im rotierten System mit konstanter Winkelgeschwindigkeit gilt
m r̈
0
= −2 m ω
~ × ~r˙ 0 − m ω × (ω × ~r 0 ) .
(1.99)
Der erste Term auf der rechten Seite wir als Corioliskraft, der zweite
als Zentrifugalkraft bezeichnet.
Die Corioliskraft steht senkrecht zur Bewegungsrichtung (es ist
schwierig auf einem Karussell geradeaus zu gehen) und ist proportional zu ω.
Die Zentrifugalkraft ist proportional zu ω 2 und zum Abstand zur
Drehachse und zeigt von ihr weg (bei einem schnell rotierenden
Karussell muss man sich gut festhalten).
Die Coriolisbeschleunigung durch die Rotation der Erde ist zwar klein vom
Betrag her, hat jedoch deutliche Auswirkungen auf die Bewegung von Luft–
und Wassermassen (Passatwinde, stärkere Erosion des rechten Ufers auf Nordhalbkugel,. . . ).
48