Handbuch Elektrische Kleinantriebe
Werbung

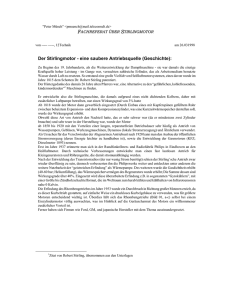
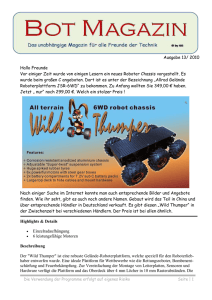
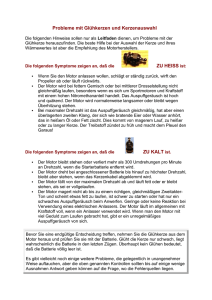
Handbuch Elektrische Kleinantriebe ISBN 3-446-40019-2 Leseprobe Weitere Informationen oder Bestellungen unter http://www.hanser.de/3-446-40019-2 sowie im Buchhandel 1 Einleitung Hans-Dieter Stölting 1.1 Allgemeines Die wirtschaftliche Bedeutung elektrischer Kleinantriebe (fractional horsepower drive), deren obere Leistungsgrenze bei etwa 1 kW liegt, ist erheblich. Allein die rotierenden Kleinmotoren unter 750 W, d. h. weder Magnete und Linearmotoren noch Stromrichter und mechanische Übertragungselemente einbezogen, erzielten nach der Statistik des Verbandes Elektrotechnik- und Elektronikindustrie e.V. (ZVEI) 2005 mit geschätzten 2,49 Milliarden EURO einen höheren Produktionswert als alle anderen Produktgruppen der Antriebstechnik (gesamter Produktionswert einschließlich Stromrichter für elektrische Antriebe ca. 6,76 Milliarden EURO). Das Bild 1.1 zeigt die Entwicklung des Produktionswertes von 1995 bis 2005. Darin sind entsprechend der ZVEI-Statistik Drehstrommotoren unter 750 W, die 2004 einen Produktionswert von 196 Millionen EURO erreichten, nicht berücksichtigt. Eine Studie der Marktforscher von Frost und Sullivan rechnet für das Jahr 2006 mit einem Umsatz an Kleinstmotoren (Leistungen unter 700 W) für Europa in Höhe von 5,4 Milliarden Dollar, d. h. mit einer Steigerung gegenüber 1999 um fast 23 Prozent. Danach wird der Großteil der Kleinstmotorenumsätze in Deutschland erzielt. Während der Markt der Wechselstrommotoren zunehmend in Sättigung gerät, sind in steigendem Maße bürstenlose Motoren gefragt (siehe auch Abschnitt 2.2.1.1). Bild 1.1 Produktion von Gleich- und Wechselstrommotoren von 1995 bis 2005 Der Produktionswert für 2005 ist geschätzt. Kennzeichen elektromagnetischer Kleinantriebe ist die außerordentliche Vielfalt ihrer Einsatzgebiete. Werden sie in Konsumgütern verwendet, sind bei zum Teil sehr großen Stückzahlen (> 1 Millionen Stück pro Jahr) die Fertigungskosten so gering wie möglich zu halten. Diese Gegebenheiten erfordern, dass kostengünstige Kleinantriebe (low-cost drives) nicht nur die elektromechanischen Bedingungen des speziellen Anwendungsfalles erfüllen, sondern auch konstruktiv möglichst gut sowohl an den anzutreibenden Mechanismus (Gerät) als auch an das wirt- schaftlichste Fertigungsverfahren angepasst sein müssen. Typische Bedingungen sind zum Beispiel: • keine überzogenen Anforderungen an Leistungsgewicht und Wirkungsgrad; • Integration in Gerät bzw. Übernahme von Gerätefunktionen durch Motorteile (z. B. ist Motorlagerschild gleichzeitig ein Teil eines Pumpengehäuses); • weitgehend automatische Fertigung in Großserie: – Stanz-Biege-Füge-Technik; – Verwendung handelsüblicher Bauteile (keine Sonderausführungen z. B. für Magnete, Lager, 14 1 Einleitung Kondensatoren), Ständer- und Läuferpakete aus unlegiertem Blech (Weißblech, oft ungeglüht eingesetzt), Ferritmagnete; grobe Stufung der Abmessungen bei Motorfamilien (Außen-, Innendurchmesser, Paketlänge), großer Luftspalt; geringer Nutfüllfaktor, möglichst einfache Wicklung, Backlackdraht; möglichst wenig gestufte Wellen, Gleitlager; möglichst einfache Elektronik. verarbeitenden Teilsystem, der Steuereinrichtung (control element), und energieübertragenden Funktionseinheiten, dem Stellelement (controlled element), dem Antriebselement (actuator), dem Übertragungselement (transfer element) und dem Wirkelement (effector, Bild 1.2). Je nach Aufgabe kann diese Struktur sehr komplex (mehrere Regler, mehrere Rückkopplungen, mehrere Beobachter usw.) sein. Außer kostengünstigen Antrieben gibt es hochwertige Kleinantriebe (high-grade drives), deren Ausführungen durch besondere, oft extreme Anforderungen bestimmt werden: • optimale elektromechanische und konstruktive Anpassung an das Gerät; • Kleinserie: spanabhebende Bearbeitung, Zusammenfügen durch Schrauben, hochwertige Bauteile: Dynamoblech oder verlustarmes Spezialblech, Seltenerd-Magnete (SmCo, zunehmend NdFeB), Wälzlager; • gegebenenfalls Vier-Quadranten-Betrieb; • besondere Eigenschaften bezüglich Leistungsgewicht, Wirkungsgrad (geringer Energiebedarf, geringe Erwärmung), Drehzahl, Rundlauf, Gleichlauf, Dynamik (geringe mechanische und/ oder elektrische Zeitkonstante), Positionierung, Überlastbarkeit, Lebensdauer, Robustheit, Wartungsfreiheit, Geräusch- und Schwingungsarmut, Elektromagnetische Verträglichkeit, Unempfindlichkeit gegenüber ungünstigen Umweltbedingungen (Temperatur, Schwingungen, Beschleunigungen, Druck, Verschmutzung (staub-, wasser-, gasdicht), elektrische und magnetische Felder). Aufgaben des informationsverarbeitenden Teilsystems (Steuereinrichtung): • Vergleich der vorgegebenen Führungsgrößen (reference variable) F (Sollwerte (setpoint value): Drehmoment, Drehzahl, Drehwinkel; Kraft, Geschwindigkeit, Position usw.) mit den entsprechenden Messwerten M (Istwert, actuell value) und Bildung der sich aus der Regelabweichung (control deviation) ergebenden Stellgrößen (controlled variable) S; • Erfassung der Störgrößen (disturbance) St und Überwachung sowie Schutz des Antriebssystems einschließlich des angetriebenen Elements; • Ausgabe von Meldegrößen (message value) Me an übergeordnete Überwachungseinrichtungen oder Systeme. – – – – Infolge dieser unterschiedlichen Bedingungen entwickelte sich im Laufe der Zeit eine fast unübersehbare Ausführungsvielfalt, die sich durch neuere Entwicklungen der Mikro- und Leistungselektronik sowie der Werkstoffe, und zwar insbesondere der Magnetwerkstoffe ständig erweitert. 1.2 Das elektromagnetische Antriebssystem Ein elektromagnetisches Antriebssystem (electromagnetic drive system) dient zur Erzeugung von Bewegungen. Es besteht aus einem informations- Aufgaben des elektrischen Energieumformers (Stellelement, Leistungsteil, Endstufe): • Umformung der elektrischen Energie (z. B. von Drehstrom- in Gleichstromenergie); • Anpassung der Motorspannung an die Versorgungsspannung; • Umsetzung der Eingangssignale (Stellgröße) in die vom Motor nutzbaren Ströme, d. h., im Stellelement treffen sich der Energie- und der Informationsfluss. Aufgaben des elektromechanischen Energiewandlers (Antriebselement, Motor): • Erzeugung eines Drehmomentes oder einer Kraft; • Erzeugung einer stetigen oder schrittweisen, rotatorischen oder translatorischen Bewegung. Aufgaben des mechanischen Energieumformers (Übertragungselement, Getriebe): • Änderung des Drehmoments und der Drehzahl; • Verringerung des Trägheitsmomentes der Last; • Umformung einer rotatorischen in eine translatorische Bewegung. 1.3 Die Antriebskomponenten 15 – Bild 1.2 Elektromagnetisches Antriebssystem 1.3 Die Antriebskomponenten 1.3.1 Motoren Die grundsätzlichen Schaltungen (circuit configuration) elektrischer Kleinmotoren bei direktem Netz- bzw. Batteriebetrieb einschließlich der typischen Drehzahl-Drehmoment-Kennlinien sowie die Möglichkeiten der Drehzahlstellung zeigt das Bild 1.3. 1.3.1.1 Motorsystematik Die grundsätzlichen Eigenschaften (fundamental characteristic) elektrischer Motoren hängen unter anderem mit dem Verfahren zusammen, mit dem ihre Wicklungen an Spannung gelegt werden. Das zyklische Einschalten der Wicklungsstränge selbstgeführter (positions-, feldgeführter) Motoren (self-commutated, self-clocked motors) erfolgt selbsttätig abhängig von der Läuferstellung, das zyklische Einschalten der Stränge fremdgeführter (netz-, frequenzgeführter) Motoren (externally commutated, line-clocked motors) zwangsweise durch das speisende Netz (line) bzw. die Steuerelektronik (control electronic). In der Tabelle 1.1 sind die wichtigsten Arten elektromagnetischer Kleinmotoren zusammengestellt. Die Aussagen bezüglich ihrer Eigenschaften gelten nur im Vergleich von Motortypen gleicher Größe bzw. Leistung. 1.3.1.2 Grundsätzliche Konstruktionsmöglichkeiten Im Folgenden sind wichtige Konstruktionsmöglichkeiten (basic design principles) mit ihren besonderen Eigenschaften stichwortartig beschrieben. Da jede elektrische Maschine in fast allen der folgenden Ausführungsvarianten und Kombinationen gebaut werden kann, ergibt sich die schon oben erwähnte fast unübersehbare Vielfalt. a) Ständer-Läufer-Konfiguration (Bild 1.4) Walzenläufer (cylindrical rotor): häufigste Bauform wegen kostengünstiger Fertigung, geringen Trägheitsmomentes (besonders bei schlankem Läufer) und geringeren Durchmessers; Scheibenläufer (disk rotor): geringe Baulänge, oft mit eisenloser Wicklung, Gefahr axialer 16 1 Einleitung Tabelle 1.1 Motorsystematik Selbstgeführte Motoren Fremdgeführte Motoren mechanischer Kommutator elektronischer Kommutator lastabhängige Drehzahl frequenzstarre Drehzahl Wechselstrommotoren Gleichstrommotoren Elektronik-(EC-) Motoren Asynchronmotoren Synchronmotoren WechselstromKommutatormotor (Universalmotor) Reihenschlussmotor, Nebenschlussmotor, fremderregter Motor, Doppelschlussmotor, permanentmagneterregter Motor Motor mit Magnetläufer: Blockstromtechnik, Sinusstromtechnik: AC-Servomotor Drehstrommotor Käfigläufer Drehstrommotor Magnetläufer Hybridläufer Wechselstrommotoren: Magnet-, Reluktanz-, Hysteresemotor Schrittmotoren: Magnet-, Reluktanz-, Hybridschrittmotor Geschalteter Reluktanzmotor (Switched Reluctance Motor) Wechselstrommotoren: Kondensatormotor, Widerstandshilfsstrangmotor Spaltpolmotor Drehzahl 3000 min–1 möglich ⇒ kleine, leichte Motoren; Drehzahlstellung und -regelung einfach Drehzahl ≤ 3 000 min–1 (bei 50-Hz-Netz) Drehzahlstellung und -regelung aufwendig Motor: weniger robust, geringere Lebensdauer, laut, vergleichsweise teuer Motor: robust, geräuscharm, kostengünstig Elektronik: kostengünstig Motor: robust, geräuscharm, mit Ferritmagneten bzw. Reluktanzläufer kostengünstig Elektronik: teuer Kräfte bei Läufern mit hart- oder weichmagnetischen Bauteilen (Lagerschäden), manchmal größeres mechanisches Trägheitsmoment; Innenläufer (inner, internal rotor): häufigste Bauform wegen guter Kühlung der Ständerwicklung, einfacherer Lagerung und einfachen Einbaus (kein rotierender Außenmantel); Zwischenläufer (intermediate rotor): Ausführung als Glockenläufer (bell rotor) oder Scheibenläufer (disk, axial rotor), insbesondere bei eisenloser Wicklung (moving coil) geringe elektrische und mechanische Zeitkonstanten, günstigere Kommutierung, gutes Rundlaufverhalten, Glockenläufer aus mechanischen Gründen nur für kleinere Leistungen (i. Allg. < 100 W) bzw. bei größeren Leistungen (bis 250 W) nur für geringere Drehzahlen, bei ECund Asynchronmotoren aufwendige Ständerfertigung (Blechpaket, Wicklung); Zwischenständer (intermediate stator): insbesondere bei nutenloser Ständerwicklung gutes Elektronik: sehr teuer Rundlaufverhalten, bei mitrotierendem magnetischem Rückschluss keine Wirbelstrommomente und -verluste; Außenläufer (outer, external rotor): für besondere Anwendungszwecke wie Lüfter und Wickler, Antriebe mit gutem Rundlaufverhalten (rotational accuracy), oft einfacheres Bewickeln des Ständers, schlechtere Ständerkühlung. b) Schnittsymmetrie (Bild 1.5) Zweiachsig symmetrische Schnitte (Ständer und Läufer liegen konzentrisch zueinander): oft günstiger einbaubar, bessere Ständerkühlung; Einachsig symmetrische Schnitte (unsymmetrische, U-Schnitte, skeleton type): meistens kostengünstiger zu fertigen, manchmal Geräuschprobleme dadurch, dass Wechselflüsse die einseitig befestigten Pole zum Schwingen anregen. 1.3 Die Antriebskomponenten ss ss ss ss ss ss Bild 1.3 Direkt am Netz betriebene Kleinmotoren ss 17 18 1 Einleitung Bild 1.4 Ständer-Läufer-Konfiguration Bild 1.5 Schnittsymmetrie c) Polfolge Heteropolar-(Wechselpol-)Motoren (Bild 1.6 links): entlang dem Umfang wechselnde Polarität, infolge des großen magnetischen Flusses günstiges Leistungsgewicht ⇒ daher überwiegend gefertigt; Homopolar-(Gleichpol-)Motoren (Bild 1.6 rechts): entlang der Achse wechselnde Polarität, wicklungsloser Läufer mit großer Anzahl von Zähnen ⇒ infolge der Luftspaltschwankungen zwar geringe, aber hochfrequente Flussschwankungen. Bild 1.6 Polfolge: links Wechselpolmotor, rechts Gleichpolmotor d) Wicklungsausführung In Nuten verteilte Wicklung (slot winding): teuer, aber i. Allg. günstigere Form des magnetischen Feldes (geringere Verluste); Konzentrierte Wicklung (concentrated winding) auf ausgeprägten Polen: einfache Fertigung, elektromagnetisch ungünstiger bei Synchronund Asynchronmotoren; Luftspaltwicklung (eisenlose, nutenlose, selbsttragende Wicklung, slotless winding): gutes Rundlaufverhalten, günstigere Kommutierung wegen geringerer Wicklungsinduktivität, Motorausnutzung geringer wegen größerem Luftspalt; Ringwicklung (ring winding): für Klauenpolsysteme (claw-pole system, siehe Abschnitt 2.4.2.2), einfachste Konstruktion für hohe Polzahlen; Nachteil von Klauenpolen: starke Streuung, hohe Wirbelstromverluste bei Wechsel- und Drehfeldern. e) Bewegungsart Motoren mit rotierendem Läufer (rotating motor) überwiegen wegen günstigerer Kosten; Linearmotoren (linear motor) wegen höherer Kosten im Konsumgüterbereich nicht verwendet (statt dessen rotierende Motoren mit Spindeln (auch als Hohlwelle), Zahnstangen oder Zahnriemen), begrenzte Bewegung, Antriebe individuell an Gerät angepasst (Direktantrieb, direct drive); Vorteil von Direktantrieben: Getriebeprobleme entfallen, z. B. kein Spiel bei Positionsantrieben; Nachteil: wegen fehlendem 1.3 Die Antriebskomponenten Getriebe keine Vergrößerung des Motormomentes bzw. Verringerung des Lastträgheitsmomentes möglich; Motoren mit sehr kurzer Bewegung: Elektromagnete (electromagnet), Schwinganker(oscillating armature) und Tauchspul-Motoren (voice-coil motor). 19 kreis, direct voltage intermediate circuit); Einstellung der für die gewünschte Drehzahl am GM benötigten Spannung über Pulsweitenmodulation (Variation des Verhältnisses von Einschaltzeit zu Taktzeit, pulse-width modulation, PWM). f) Betriebsart Stetig, schrittweise oder schwingend; dauernder, kurzzeitiger, aussetzender usw. Betrieb. Drehzahlstellung: Spannungsvorgabe beispielsweise über ein Potentiometer; Gleichstrom-Nebenschlussmotor (GNM, DC shunt-wound motor): Erweiterung des Drehzahlbereichs durch Feldschwächung (field weakening). 1.3.2 Elektronische Schaltungen Drehzahlregelung: zusätzlich (Tachogenerator) und Regler. Das Bild 1.7 zeigt die Möglichkeiten elektronisch betriebener Kleinantriebe, die im Folgenden für eine erste Orientierung stichwortartig beschrieben werden. 1.3.2.1 Schaltungen für selbstgeführte Motoren Gleichstrommotor (GM, DC motor) Betrieb am Wechselstromnetz: Gleichrichter (ungesteuerte Brücke, rectifier); Problem bei permanentmagneterregten Motoren: Ankerwicklung muss für Netzspannung ausgelegt sein, falls kein Vorwiderstand oder Spannungsteiler vorhanden ist ⇒ teurer Läufer. Bei einfachen Antrieben keine zusätzliche Glättung: Mischstrommotor. Betrieb mit Lineartransistor (im linearen Bereich arbeitender Transistor): Transistor wirkt wie Vorwiderstand; geringster Aufwand; hohe Verlustleistung durch Differenz zwischen Versorgungsund Motorspannung an der Kollektor/EmitterStrecke, insbesondere bei niedrigen Drehzahlen und hohen Drehmomenten ⇒ niedriger Wirkungsgrad; deshalb nur für Antriebe mit sehr kleinen Leistungen oder kurzen Einschaltzeiten. Chopperschaltungen: Betrieb der Transistoren als Schalter; Wirkungsgrad günstiger. Betrieb mit einem Transistor: Ein-QuadrantenBetrieb (single-quadrant drive); gegebenenfalls Drehrichtungsänderung durch mechanischen Umschalter; Freilaufdiode (free-wheeling diode) parallel zum Motor bzw. Anker, um Strom in Schaltpausen (Sperrphase) zu führen. Betrieb mit H-Brücke (full bridge, H-bridge): Vier-Quadranten-Betrieb (four-quadrant drive); bei Wechselstromanschluss Gleichrichter und Glättungskondensator (Gleichspannungszwischen- Drehzahlsensor Positionsregelung gegebenenfalls einschließlich Erzeugung eines Haltemomentes (holding torque): H-Brücke und Sensor zur Positionserfassung (Encoder); Reglerstruktur ist üblicherweise Kaskadenregelung (cascade control) mit Positionsregler (position regulator) und unterlagerter Drehzahlund Stromregelung (inner speed and current control loop); Vorteil von GM: nur ein Stromwert muss geregelt werden. Elektronik-Motor (electronically commutated (EC) motor, brushless DC motor) Betrieb am Wechselstromnetz: Gleichrichter, Gleichspannungszwischenkreis und H- oder Drehstrombrücke (constant-voltage DC-link converter): Elektronik schaltet die Wicklungsstränge im Stator in Abhängigkeit von der Rotorlage zyklisch weiter ⇒ Drehfeld; Erfassung der Rotorlage durch im Stator integrierte Sensoren (Rotorlagegeber) oder sensorlos durch Auswertung der im gerade nicht bestromten Statorstrang induzierten Spannung. Drehzahlstellung durch Änderung der Zwischenkreisspannung. Drehzahlregelung und Positionsregelung wie bei GM, allerdings müssen zwei oder drei Ströme geregelt werden; aber höhere Dynamik möglich, weil Kommutierung nicht mechanisch erfolgt. Universalmotor (UM, universalmotor) Anwendung hauptsächlich im Konsumgüterbereich, weil direkter Wechselstrombetrieb möglich und elektronische Drehzahlstellung (Phasenanschnittsteuerung, phase-angle control) besonders einfach (kostengünstig) ist; Halbwellensteuerung (half-wave control): geringster Aufwand, allerdings nur für kleine Leistungen; 20 1 Einleitung Bild 1.7 Elektronisch betriebene Kleinantriebe Vollwellensteuerung (full-wave control): Nutzung beider Stromhalbwellen, daher für größere Leistungen; Zündung des Triac zunehmend durch Phasenanschnittsteuer-IC; für höhere Ansprüche wird der Anschnittsteuerung eine Gleichrichtung nachge- schaltet ⇒ Strom lückt nicht mehr ⇒ Verbesserung der Kommutierung; Problem von UM: Drehzahl sinkt im gesteuerten Betrieb überproportional mit zunehmender Belastung ⇒ daher oft 1.3 Die Antriebskomponenten Drehzahlregelung erforderlich: Erweiterung der Phasenanschnittsteuerung um einen Drehzahlgeber (i. Allg. ein einfacher Tachogenerator) und einen Regler. 1.3.2.2 Schaltungen für fremdgeführte Motoren Asynchronmotor (AM, AC motor) Phasenanschnittsteuerung: einfachste Schaltung, aber Drehzahlstellbereich eingeschränkt wegen konstanter synchroner Drehzahl. Außerdem M ≅ U 2 und hohe Verlustleistung. Frequenzumrichter (frequency converter) nur für dreisträngige Motoren (Drehstrom-Asynchronmotoren, DAM): Stellung der Drehzahl von null bis Bemessungsdrehzahl; Feldschwächung, d. h. weitere Drehzahlerhöhung (wie bei GM) möglich; für konstante Motorausnutzung ist konstantes Verhältnis induzierte Spannung/Frequenz (Ui/f) Voraussetzung; mit zunehmender Drehzahl (Frequenz) verringert sich wegen des abnehmenden Spannungsabfalls an der Statorwicklung der Unterschied zwischen Ui und (konstanter) Klemmenspannung und damit Ui/f ⇒ daher gegebenenfalls Abhilfe z. B. durch I ∗ R-Kompensation oder Schlupffrequenzkompensation: Berechnung der Schlupffrequenz für die erwartete Belastung aus den Motordaten; die Summe aus erwarteter Drehzahl- und Schlupffrequenz ist die vom Frequenzumrichter zu liefernde Drehfeldfrequenz. Drehzahlregelung: Erweiterung des Frequenzumrichters um einen Drehzahlsensor (Tachogenerator) und einen Regler. Drehmomentregelung: Zweck ist schnelle und genaue Einstellung des Drehmomentes wie bei GM; da bei AM die Lage des Drehfeldes bezüglich der Läuferlage variabel ist, ist Umrechnung der Motorströme und -spannungen des dreiphasigen Systems in ein sich an einer elektrischen Größe (Fluss) orientierendes Koordinatensystem erfor- 21 derlich (feldorientierte Regelung, Vektorregelung, field-oriented control); Berechnung des Motorflusses und der Stellgrößen mit Motormodell. Positionsregelung: Ähnlich wie bei GM: Positionsregler mit unterlagerter Drehzahl- und Stromregelung sowie zusätzlich Flussregelung; Vektor- und Positionsregelung wegen hoher Kosten im unteren Leistungbereich zur Zeit noch nicht häufig. Drehstrom-Synchronmotor (DSM, three-phase synchronous motor) Drehzahlstellung mit Frequenzumrichter: Beschleunigung und Verzögerung entlang einer Frequenzrampe; Drehzahlerweiterung durch Feldschwächung im Gegensatz zu GM und AM nur bedingt möglich. Drehzahlregelung: zusätzlich Drehzahlgeber und Regler. Positionsregelung: einfacher als bei DAM, da Feld im Rotor eingeprägt ist; Zusätzlich Positionsgeber; Reglerstruktur identisch der für GM und DAM: Positionsregler mit unterlagertem Drehzahlund Stromregler. Steuerung oder Regelung von DSM nur bei höheren Leistungen üblich. Schrittmotor (stepper motor) Positionierung bei gegebener Schrittweite über Anzahl der Impulse (Voll- oder Halbschrittbetrieb, full- or half-step operation); Steuerfrequenz von Elektronik vorgegeben; offener Steuerkreis (openloop control), daher kostengünstig; angepasste Impulsfolge für Starten und Stoppen; feinere Positionierung durch Mikroschrittbetrieb (microstep operation): Unterteilung eines Vollschrittes in eine Anzahl Mikroschritte durch pulsweitenmodulierte (PWM) Ansteuerung benachbarter Wicklungen. Gelegentlich als Servoantrieb für Stellantriebe mit Positionsgeber und Reglerstruktur ähnlich der der anderen Antriebsarten.