Inhaltsangabe - Ihre Homepage bei Arcor
Werbung

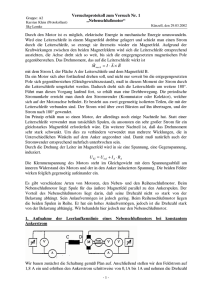
Seite 0 Inhaltsangabe: 1. Einsatzgebiete von Gleichstrommotoren Seite 2 2. Wann und Warum werden Gleichstrommotoren eingesetzt? Seite 2 3. Wie wird der Gleichstrommotor angeschlossen? Seite 3 3.1 Gleichstromnebenschlussmotor Seite 3 3.2 Gleichstromreihenschlussmotor Seite 5 3.3 Schrittmotor Seite 6 3.4 elektronisch kommutierte Motoren Seite 6 4. Datenblätter Seite 6 5. Quellen Seite 8 Seite 1 1. Einsatzgebiete von Gleichstrommotoren Überall wo drehzahlgesteuerte und geregelte Antrieb benötigt werden, lassen sich Gleichstrommotoren einsetzen. Diese werden in Fahrzeugen (Anlasser, Scheibenwischer, Gebläse- und Stellmotoren / Servomotor) eingesetzt. Ein typisches Einsatzgebiet sind Orte, wo nur Akkumulatoren oder Batterien für eine Stromversorgung möglich sind. Auch in der Industrie kommen Gleichstrommotoren in Werkzeugmaschinen, Hubgeräten, Walzstraßen, Förderanlagen und Robotern vor. Ihre Bandbreite geht von Antriebsmotoren für Nahverkehrsbahnen bis hin zu elektrischen Miniaturmodellen von wenigen Millimetern Größe. Durch den verstärkten Einsatz der Mikroelektronik in der Antriebstechnik wird die Bedeutung von Gleichstromantrieben zwar stetig geringer, jedoch ist der Einsatz von Frequenzumrichtern für Drehstromantriebe momentan noch nicht in jedem Fall wirtschaftlich sinnvoll. Seite 2 Wann und Warum werden Gleichstrommotoren eingesetzt? Die Drehzahl und das Drehmoment lassen sich bei Gleichstrommotoren sehr einfach steuern. Zusätzlich verfügt sie über eine hohe Rundlaufgüte. Es gibt sehr kleine Motoren mit einer Leistung von unter einem Watt, die für Feinwerktechnik konstruiert werden. Großmotoren, die mit einer Spannung von 1500 V betrieben werden nehmen über 10.000 kW Leistung auf. Sehr weit verbreitet sind Motoren bis ca. 100 W. Viele von ihnen werden durch Dauermagneten betrieben. Aufgrund des hohen Anlaufdrehmoments und der guten Steuerbarkeit der Fahrgeschwindigkeit über die Betriebsspannung findet dieser Motor vor allem in Straßenbahnen und Lokomotiven Verwendung. Da der Laststrom bei zunehmender Belastung nur mit der Wurzel des Drehmomentes steigt, eignet sich der Reihenschlussmotor besonders bei Schweranlauf. A: Ankerstrom (links) und B: Drehzahl (rechts) als Funktion des belastenden Moments beim Reihenschlussmotor. 3. Wie wird der Gleichstrommotor angeschlossen? 3.1 Gleichstromnebenschlussmotor Die Nebenschluss-Erregerwicklung ist parallel zum Ankerstromkreis geschaltet und an eine feste, gleich bleibende Spannung angeschlossen. Der Erregerstrom hängt somit nicht von der Belastung ab und beträgt nur wenige Prozent des Ankerstroms. Im Bereich der Industrieantriebe werden vor allem fremderregte Gleichstromnebenschlussmotoren angewandt, da die Drehzahl dieser Maschinen leicht zu regeln ist. Im Gegensatz zum selbsterregten Gleichstromnebenschlussmotor besitzt er einen vom Ankerstrom getrennten Stromkreis, der nur die Erregerwicklungen durchfließt (Fremderregung). Falls die Spannung dieses Stromkreises konstant ist, entspricht das Schaltbild des Gleichstromnebenschlussmotors dem des fremderregten Gleichstromnebenschlussmotors. Seite 3 Der Kreis mit dem Motorzeichen M stellt die eigentliche Leiterschleife dar, die im Magnetfluss F der Erregerspulen rotiert. Infolge dieser Drehbewegung, die mit der Winkelgeschwindigkeit W = 2p n erfolgt (n ist die Drehzahl des Ankers), wird in den Erregerspulen eine Urspannung induziert, die dem Ankerstrom IA entgegenwirkt (Lenzsche Regel). Die Urspannung E hat dieselbe Richtung wie die Ankerspannung U: Sie geht von der Plusklemme A1 über den Kollektor in die Leiterschleifen des Ankers, welche den Widerstand RA aufweisen und von dort wiederum zurück über den Kollektor zur Minusklemme A2. Ersatzschaltbild eines fremderregten Gleichstrommotors Folgende zwei Schaltungen (gleiche Funktion mit unterschiedlichen Transistortypen) liefern das Grundmuster für die meisten vorgestellten Motoren mit externer Versorgungsspannung Schaltung mit Darlington-Transistor BD645 (tauschbar gegen BD647, BD649) D* = 1N4004, R* = 100 Ohm (Richtwert), C* = 100 nF (Richtwert) Schaltung mit "smart Transistor" BUK100-50GL D* = 1N4004, R* = 100 Ohm (Richtwert), C* = 100 nF (Richtwert) Seite 4 Die Diode 1N4004 in der Versorgungsleitung der Sensorbox sperrt während der negativen Störimpulse an der Aktuator-Versorgung und hält diese von der Sensorbox fern. Der 100 uF Kondensator überbrückt die dabei eintretenden kurzen Unterbrechungen der Stromversorgung. Positive Störimpulse werden in der Sensorbox stabilisiert Der große Elektrolytkondensator 1000 uF puffert die Betriebsspannung am Motor und hält sie während der Belastungsspitzen stabil. Elektrolytkondensatoren haben allerdings eine gewisse Reaktionszeit, diese wird durch den kleineren aber schneller reagierenden keramischen Kondensator überbrückt. Die RC-Kombination R* C* dämpft die Schalt- und Kommutierungsimpulse des Motors und schließt dabei entstehende Hochfrequenzstörungen kurz, die insbesondere bei Gleichstrommotoren durch Funken an den Bürsten entstehen. Die angegebenen Werte sind optimiert für einen 12 Volt Mabuchi- Motor mittleren Kalibers. Diode D* ist hier extrem wichtig. 3.2 Gleichstromreihenschlussmotor Die Drehzahl n ist sehr Lastabhängig. Wird der Motor belastet, so steigt der Ankerstrom Ia und damit der Erregerstrom If an, denn es gilt I = Ia = If. Bei steigendem Erregerstrom If wird die Drehzahl n kleiner. Wird die Belastung des Motors kleiner so steigt seine Drehzahl stark an. Bei Leerlauf wird sie unzulässig hoch, „Der Motor geht durch“. Reihenschlussmotoren dürfen deshalb nicht ohne Belastung betrieben werden. Seite 5 3.3 Schrittmotor Schrittmotoren erzeugen ihre Rotation auch durch ein Drehfeld. Bei diesem Motorentyp ist das Drehfeld aber gezielt durch einzelne Impulse steuerbar. Beispielschaltung: 3.4 elektronisch kommutierte Motoren Elektronisch kommutierte Motoren ersetzen die störanfällige elektromechanische Polwendung durch Rotations- Sensoren und elektronische Schalter. Solche Motoren brauchen auf jeden Fall ein spezielles, herstellerspezifisches Steuergerät, teilweise bereits im Motor eingebaut. Je nach Ausführung kann dieses ein digitales oder analoges Steuerinterface haben. Analoge Interfaces können mit der Sensorbox gesteuert werden, dies erfordert aber jeweils spezielle Anpassung und wird hier nicht weiter verfolgt. Seite 6 Datenbläter Manuel sei Arbeit Seite 7 5. Quellen - Buch: Elektrotechnik Fachstufe 1 und 2 Energietechnik Verlag Westermann 5. Auflage 1986 - Programm (Lexikon): Microsoft Encarta Enzyklopädie 2006 Professional Internetseite: - www.google.de Seite 8