Schrittmotoren steuern
Werbung

Steuerung von Schrittmotoren mit dem ATmega32
Schrittmotoren besitzen einen Rotor mit einer ganzen Reihe permanentmagnetischer Pole. Die Bewegung des Rotors erfolgt durch eine Folge
elektrischer Ummagnetisierungen der Statorpole. Bei jedem
Ummagnetisierungsschritt bewegt sich der Rotor um einen definierten
Drehwinkel weiter. Dieser Drehwinkel hängt von der Anzahl der Rotor- und
Statorpolpaare ab.
Man unterscheidet unipolare und bipolare Schrittmotoren.
Unipolare Schrittmotoren haben 2 Wicklungen mit Mittelanzapfung. Sie haben 5
bis 6 Anschlüsse.
Bipolare Schrittmotoren haben 2 Wicklungen ohne Mittelanzapfung. Sie haben 4
Anschlüsse.
Unipolare Schrittmotoren lassen sich einfach mit einer Spannungspolarität
ansteuern, während bei bipolaren Schrittmotoren die Spannung zur Ansteuerung
umgepolt werden muss.
Man unterscheidet Vollschritt- und Halbschrittbetrieb.
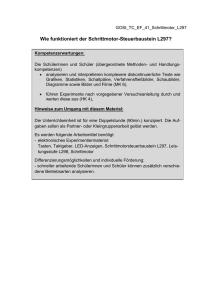
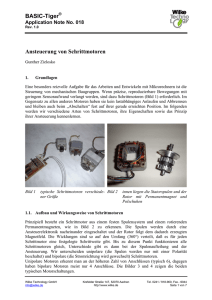
Unipolarer Schrittmotor: Vollschrittbetrieb
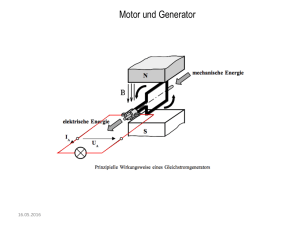
Die Abbildung veranschaulicht die Arbeitsweise. bei der Drehung des Motors
werden periodisch 4 Schritte durchlaufen. Der vereinfacht dargestellte Motor
mit einen Statorpolpaar dreht sich bei jedem Schaltschritt um 90 Grad nach
rechts.
Für die Ansteuerung des Motors vom Mikrocontroller her ist ein MotortreiberBaustein erforderlich. Hierzu eignet sich hervorragend das IC ULN2803A.
N
N
A
N
S
S
B
S
N
S
S
N
A
N
B
S
Schritt 1
DCBA
1001
Bytewert
9
DCBA
0101
D
C
D
S
N
S
S
Schritt 2
A
N
N
B
N
C
S
N
S
A
S
B
N
Schritt 3
DCBA
0110
D
Bytewert
5
Schritt 4
Bytewert
6
C
DCBA
1010
Bytewert
10
C
D
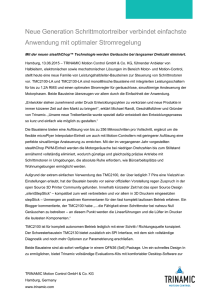
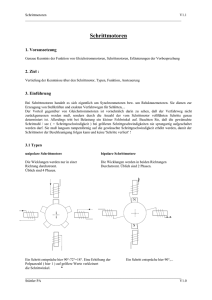
Unipolarer Schrittmotor: Halbschrittbetrieb
Während im Vollschrittbetrieb in den 4 Schritten immer beide Wicklungen
stromdurchflossen sind, werden im Halbschrittbetrieb 4 weitere Schritte
eingebaut, bei denen nur jeweils eine Wicklung eingeschaltet ist.
Bei jedem Schritt dreht sich unser Modellmotor um 45 Grad. Die Auflösung der
Drehbewegung in Einzelschritte wird damit verdoppelt (8 Schritte statt 4
Schritte). Der Motor dreht sich deshalb bei gleicher Schrittgeschwindigkeit nur
noch halb so schnell.
Bei der Ansteuerung eines Schrittmotors muss zwischen den Schaltschritten
eine kurze Wartezeit eingebaut werden. Bei zu kleiner Wartezeit kann der
Schrittmotor der Schrittgeschwindigkeit nicht mehr folgen. Die maximal
mögliche Schrittgeschwindigkeit muss bei fehlendem Datenblatt experimentell
ermittelt werden.
N
N
S
B
S
Schritt 1
DCBA
1001
B
S
Schritt 2
DCBA
0001
Bytewert
9
D
N
C
A
A
S
N
N
S
S
N
N
B
B
S
Schritt 4
Schritt 3
DCBA
0101
D
N
DCBA
0100
Bytewert
5
D
C
S
S
S
A
N
S
N
B
B
N
Schritt 5
DCBA
0110
D
Schritt 6
Bytewert
6
S
A
A
S
N
S
B
N
B
Schritt 7
C
D
DCBA
1010
Bytewert
2
C
N
S
S
DCBA
0010
D
C
N
Bytewert
4
C
S
A
N
N
Bytewert
1
C
D
S
N
S
S
N
A
N
A
Schritt 8
Bytewert
10
DCBA
1000
C
D
Bytewert
8
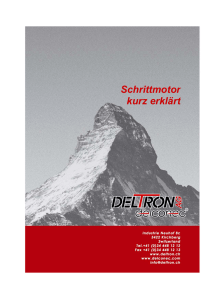
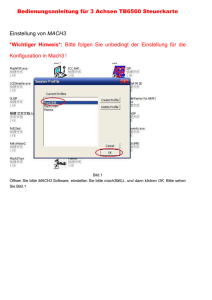
Bipolarer Schrittmotor: Vollschrittbetrieb
Beim bipolaren Schrittmotor müssen die Spannungen an den beiden
Statorwicklungen bei der Schrittsteuerung umgepolt werden können. Das macht
die elektronische Ansteuerung etwas komplizierter.
Bei geeigneter Ansteuerelektronik zum Beispiel mit den IC L298N Muliwatt-15
kann der bipolare Schrittmotor mit derselben Bytefolge angesteuert werden wie
der unipolare Schrittmotor:
A
N
S
S
B
S
N
B
S
Schritt 1
D C B A Bytewert
1001
9
+
D
C
D
C
+
S
A
N
N
B
N
S
S
Schritt 2
D C B A Bytewert
0101
5
N
S
N
S
+
A
S
B
N
Schritt 3
D C B A Bytewert
0110
6
D
C
+
+
S
S
N
A
N
+
N
N
+
Schritt 4
D C B A Bytewert
1010
10
D
+
C
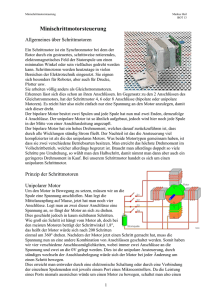
Bipolarer Schrittmotor: Halbschrittbetrieb
Auch hier ergibt sich durch die 4 zusätzlichen Zwischenschritte eine Halbierung
des Schrittwinkels und eine Halbierung der Drehzahl.
S
S
B
S
Schritt 1
DCBA
1001
+
D
A
S
N
D
S
D
N
S
Schritt 5
DCBA
0110
S
A
N
S
+
Bytewert
6
C
+
S
B
N
Schritt 6
DCBA
0010
D
S
C
N
S
N
N
Schritt 7
DCBA
1010
Bytewert
2
A
S
B
+
C
A
N
+
C
N
B
Bytewert
4
+
A
N
D
Schritt 4
DCBA
0100
Bytewert
5
C
S
N
N
B
+
D
A
B
Schritt 3
DCBA
0101
Bytewert
1
C
+
N
S
S
D
C
N
S
Schritt 2
DCBA
0001
Bytewert
9
+
B
S
N
S
N
N
A
N
+
N
S
A
N
S
B
+
Bytewert
10
Schritt 8
DCBA
1000
D
+
C
Bytewert
8
Schrittmotor-Steuerprogramm in C
In C schreibt man die Folge der Bytewerte zum Ansteuern des Schrittmotor am
besten in Arrays:
uint8_t vs[4]={9,5,6,10},
//Tabelle Vollschritt Rechtslauf
hs[8]={9,1,5,4,6,2,10,8}; //Tabelle Halbschritt Rechtslauf
Will man nun z.B. 1000 Schritte benötigt man eine Variable z zum Zählen der
Anzahl der durchgeführten Schritte und eine Variable n für die Schrittnummer:
uint16_t
z, n=0;
Das Programm für Vollschrittbetrieb kann dann so aussehen:
DDRA=0x0f; //Motor ist an Bit 0,1, 2 und 3 von Port A angeschlossen.
for (z=0; z<1000; z++){ PortA=vs[n & 3]; warte10ms(); n++;}
Mit der Und-Verknüpfung n & 3 werden aus der Schrittvariablen n die letzten
beiden Bits ausmaskiert. n & 3 durchläuft so beim Hochzählen von n periodisch
die Werte 0, 1, 2 und 3.
Mit PortA=vs[n & 3] wird der Bytewert aus der Tabelle vz gelesen und zum
Schrittmotor übertragen.
Die Funktion warte10ms() sorgt dann für notwendige die Schaltverzögerung von
10 ms.
Mit n++; wird der nächste Rechtslaufschritt vorbereitet. Setzt man hier n--; ein
läuft der Motor im Linksrichtung.
Oben wurde der Startwert der Schrittvariablen n einfach auf 0 gesetzt. Das ist
nicht ganz korrekt.
Denn man weiß nie, wie der Schrittmotor beim Start steht. Deshalb steuert man
üblicherweise nach dem Start des Programms einen Rererenzpunkt als Nullmarke
an, bei dem ein Endschalter betätigt wird. Danach hat die Schrittvariable n
einen exakten Startwert.
Meine Schaltung
Das vollständige Programm
#include <avr/io.h>
#include "warten.h"
void rechtslauf_Hschritte(uint16_t ns){
//Steuerung eines unipolaren Schrttmotors uint16_t z;
for (z=0;z<ns;z++){
(3.6 Grad/Vollschritt)
n++;
// W.Tschallener 4.10.2006
PORTD=hs[n&7];
warten10ms();
//Tabelle Vollschritt
}
uint8_t vs[4]={9,5,6,10},
}
void linkslauf_Hschritte(uint16_t ns){
//Tabelle Halbschritt
uint16_t z;
hs[8]={9,1,5,4,6,2,10,8},
for(z=0;z<ns;z++){
n;
n--;
void rechtslauf_Vschritte(uint16_t ns){ PORTD=hs[n&7];
warten10ms();
uint16_t z;
}
for ( z=0;z<ns;z++){
}
n++;
void main(){
PORTD=vs[n&3];
n=0;
warten10ms();
DDRD=15;
}
PORTB=0x0f;
}
void linkslauf_Vschritte(uint16_t ns){
uint16_t z;
for(z=0;z<ns;z++){
n--;
PORTD=vs[n&3];
warten10ms();
}
}
do{
rechtslauf_Hschritte(200);
warten1s();
linkslauf_Hschritte(200);
warten1s();
}while(1);
}