Aufbau und Steuerung von Schtrittmotoren
Werbung

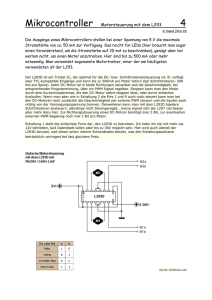
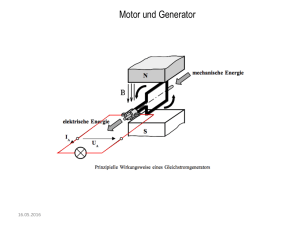
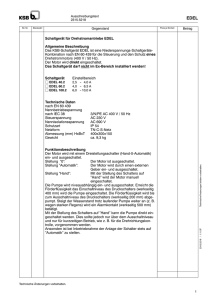
Minischrittmotorsteuerung Markus Heil BOT 13 Minischrittmotorsteuerung Allgemeines über Schrittmotoren Ein Schrittmotor ist ein Synchronmotor bei dem der Rotor durch ein gesteuertes, schrittweise rotierendes, elektromagnetisches Feld der Statorspule um einen minimalen Winkel oder sein vielfaches gedreht werden kann. Schrittmotoren werden heutzutage in vielen Bereichen der Elektrotechnik eingesetzt. Sie eignen sich besonders für Roboter, aber auch für Drucke, Plotter usw. Sie arbeiten völlig anders als Gleichstrommotoren. Erkennen lässt sich dies schon an ihren Anschlüssen. Im Gegensatz zu den 2 Anschlüssen des Gleichstrommotors, hat der Schrittmotor 4, 6 oder 8 Anschlüsse (bipolare oder unipolare Motoren). Es reicht hier also nicht einfach nur eine Spannung an den Motor anzulegen, damit sich dieser dreht. Der bipolare Motor besitzt zwei Spulen und jede Spule hat nun mal zwei Enden, demzufolge 4 Anschlüsse. Der unipolare Motor ist so ähnlich aufgebaut, jedoch wird hier noch jede Spule in der Mitte von einer Anschlussleitung angezapft. Der bipolare Motor hat ein hohes Drehmoment, welches darauf zurückzuführen ist, dass durch alle Wicklungen ständig Strom fließt. Der Nachteil ist das die Ansteuerung viel komplizierter ist als die des unipolaren Motors. Was beide Motortypen gemeinsam haben, ist dass sie zwei verschiedene Betriebsarten besitzen. Man erreicht das höchste Drehmoment im Vollschrittbetrieb, welcher allerdings begrenzt ist. Braucht man allerdings doppelt so viele Schritte pro Umdrehung, so wählt man den Halbschritt, damit nimmt man dann aber auch ein geringeres Drehmoment in Kauf. Bei unserem Schrittmotor handelt es sich um einen unipolaren Schrittmotor. Prinzip der Schrittmotoren Unipolarer Motor Um den Motor in Bewegung zu setzen, müssen wir an die Spule eine Spannung anschließen. Man legt die Mittelanzapfung auf Masse, jetzt hat man noch vier Anschlüsse. Legt man an zwei dieser Anschlüsse eine Spannung an, so fängt der Motor an sich zu drehen. Dies geschieht jedoch in kaum sichtbaren Schritten. Wie groß ein Schritt ist hängt vom Motor ab, doch bei den meisten Motoren beträgt der Schrittwinkel 1,8°, das heißt der Motor würde sich nach 200 Schritten einmal um 360° drehen. Nachdem der Motor jetzt einen Schritt gemacht hat, muss die Spannung nun an eine andere Kombination von Anschlüssen geschaltet werden. Somit haben wir vier verschiedene Anschlussmöglichkeiten, wobei immer zwei Anschlüsse an die Spannung und zwei an die 0V gelegt werden. Dies ist die unipolare Ansteuerung, durch ständiges wechseln der Anschlussbelegung würde sich der Motor bei jeder Änderung um einen Schritt bewegen. Dies erreicht man entweder durch eine elektronische Schaltung oder durch eine Verbindung der einzelnen Spulenenden mit jeweils einem Port eines Mikrocontrollers. Da die Leistung eines Ports niemals ausreichen würde um einen Motor zu bewegen, schaltet man also einen 1 Minischrittmotorsteuerung Markus Heil BOT 13 Verstärker dazwischen. Um den Motor nun ständig mit Spannung an seinen vier Anschlüssen zu versorgen, müsste der Mikrocontroller also nur noch eine vierstellige Bitkombination ausgeben. Somit würde sich der Motor bei jeder Portausgabe einen Schritt bewegen. Das Ganze könnte man dann in der Software mit einer Schleife machen, so, dass dieser Schleifenindex die Anzahl der Schritte wiedergibt. Hierdurch lässt sich genau festlegen wieweit sich der Schrittmotor dreht. Durch diesen Schrittmotor lassen sich sehr gut Roboter1 steuern, denn genauer als durch so einen Schrittmotor lässt er sich nur selten steuern. Nachteil dieser Motoren ist, dass sie auch im Stand mit Strom versorgt werden und dass bei der Steuerung von Robotern oft der Motor zu schwach ist, so dass es passieren kann, dass einige Schritte verloren gehen. Dadurch wäre die genaue Positionierung gestört. Bipolarer Motor Hier haben wir nur vier Anschlüsse, da die Mittelanzapfung wegfällt. Im Prinzip sind diese Motoren genauso angesteuert wie die unipolaren Motoren, nur das durch den Wegfall der Mittelanzapfung kein unterschiedliches Magnetfeld erreicht wird. Man erreicht es erst dadurch, dass man die Spannung immer umpolt. Dies war lange Zeit für Bastler zu kompliziert, doch durch neue integrierte Schaltkreise ist das heute kein Problem mehr. Was heute ebenfalls möglich ist das man einen Motor mit acht Anschlüssen hat, bei diesem sind die beiden Spulen aufgetrennt. Diese Motoren erlauben wahlweise eine bipolare wie eine unipolare Ansteuerung. Funktion des Schrittmotors An unserem Schrittmotor befinden sich drei Eingänge „CLOCK“, „DIR“ und „ENABLE“. Mit diesen Eingängen lassen sich alle Funktionen unseres Motors steuern. Des Weiteren haben wir einen Jumper, über welchen der Betriebsmodus wählbar ist. Jumper gesteckt = Halbschritt Jumper offen = Vollschritt Über die Spannung am „DIR“ Eingang lässt sich die Drehrichtung ändern. Bei einem High- Pegel wäre die Drehrichtung in Linksrichtung und bei einem Low- Pegel wäre sie in Rechtsrichtung (siehe Abbildung). Abschalten lässt sich der Motor über zwei Möglichkeiten: 1. Über den Eingang „ENABLE“, dieser führt nur Spannung, wenn dieser Eingang auf High-Pegel liegt. Ist dies nicht der Fall, bleibt der Motor stehen, allerdings befindet sich der Motor dann nur im Leerlauf, da nun kein Haltestrom mehr fließt. 2. Abschalten des Clock Signals. Hierdurch würde der Motor durch den fließenden Haltestrom gebremst werden. Ein Nachteil wäre die Erwärmung des Motors durch den Haltestrom. 1 Bei den verwendeten Robotern handelt es sich um Roboter für Hobbybastler die man im Haus benutzen kann. 2 Minischrittmotorsteuerung Markus Heil BOT 13 Schaltung In Abbildung 3 lässt sich sehr gut erkennen, dass die Schaltung nur aus sehr wenigen Bauteilen besteht. Über die beiden Schraubklemmen „12V-15V“ und „GND“ wird die mittels C1 gesiebte Betriebspannung zugeführt. IC1 erzeugt hieraus eine stabilisierte Spannung von 5V. Kern der Schaltung ist IC2, dies ist ein programmierbarer Logikbaustein vom Typ GAL16V8. Über diesen Logikbaustein werden die Steuersignale für den Schrittmotor gewonnen. Die Ausgangssignale des IC2 sind aber nicht direkt für den Schrittmotor einsetzbar. Da diese noch zu gering sind, müssen sie erst einmal über IC3 (ULN2003) verstärkt werden. IC3 hat 8 Open- Kollektor- Ausgänge und kann je Kanal max. 500 mA schalten. Über drei weitere Anschlussklemmen gelangen Steuersignale zur Schaltung („CLOCK“, „DIR“ und „ENABLE“). Das „CLOCK“- Signal wird über die Eingangsschutzschaltung, bestehend aus R1, R2, D1 und D2 direkt auf den Clock- Eingang des GALs geführt, während die Signale „DIR“ und „ENABLE“ zuvor IC3 zur Regelanpassung durchlaufen. CLOCK: Jeder Low- High- Übergang bewirkt ein Weiterdrehen des Motors um einen Schritt. DIR: Bei High- Pegel dreht der Motor in Linksrichtung, während sich bei LowPegel die Drehrichtung ändert. ENABLE: Im normalen Betrieb wird ENABLE auf High- Pegel gehalten. Dies bewirkt, dass alle Ausgänge aktiv sind. Bei Low- Pegel hingegen sind alle Ausgänge abgeschaltet, und der Motor befindet sich im Leerlauf. 3