2. drehzahlsteuerung beim drehstrom
Werbung

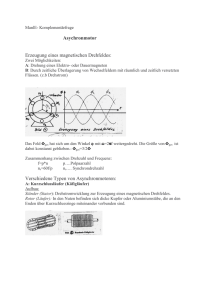
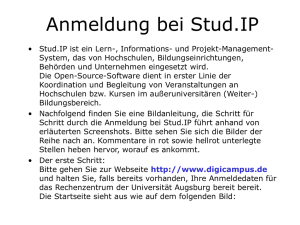
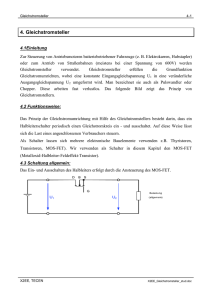
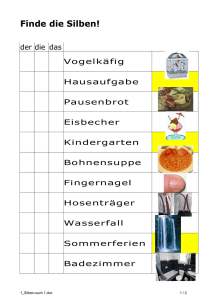
Drehzahlsteuerung der DASM 2. 2-1 DREHZAHLSTEUERUNG BEIM DREHSTROM-ASYNCHRONMOTOR 2.1 Übersicht der Möglichkeiten zur Drehzahlsteuerung der DASM Die Drehzahl n eines Drehstromsasynchronmotors DASM läst sich nach der Formel ___________________________ ___________________________ ___________________________ berechnen. Die Drehfelddrehzahl ns (synchrone Drehzahl, Umdrehungsfrequenz) bestimmt sich aus der Gleichung: ______________________________ ___________________________________ Aus den beiden Gleichungen ergibt sich somit die folgende Beziehung: Hieraus ist ersichtlich, dass die Drehzahl eines Asynchronmotors durch Verändern der folgenden Größen ebenfalls verändern lässt: 1. Die Drehzahl n ist in Abhängigkeit vom __________________________ 2. Die Drehzahl n ist in Abhängigkeit von der ________________________ 3. Die Drehzahl n ist in Abhängigkeit von der ________________________ 4. Des weitern ist durch unterschiedliche ___________________________ die Drehzahl ebenfalls veränderbar. Alle angegeben Verfahren haben praktische Bedeutung erlangt und werden in den folgenden Kapitel einzeln behandelt. X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-2 2.2 Drehzahlsteuerung beim DASM durch Verändern der Läufergrößen (Schlupfsteuerung) Nach der Gleichung ist erkennbar, dass die Motordrehzahl sich verringert beim ________________________________________ vergrößert sich beim ________________________________________ Gegeben ist folgende Drehmoment-Schlupf-Kennlinie eines Drehstromasynchronmotors: ___________________________ ___________________________ ___________________________ ___________________________ ___________________________ Die Theorie der Drehstromasynchronmaschine besagt, dass durch Verändern der Läufergrößen, der _______________________________ sich ebenfalls verändert. ____________________________________________________________________ ______________________________________________________ In der Ausführung der Maschine als Schleifringläufer besteht die Möglichkeit, an den Anschlüssen _____ des Läufers einen ___________________________________ zuzuschalten. Der Strangwiderstand der Läuferwicklung erhöht sich somit von __________________________________________ X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-3 (Die genauen Abläufe werden auf den Klassen 12TEE und 13TEE behandelt) Da der Läufer eines Käfigläufers nicht zugänglich ist, ist die Drehzahlsteuerung nach dem Prinzip der Schlupfsteuerung _________________________________________ Durch den zusätzlichen Läuferwiderstand verschiebt sich der Kippschlupf sK horizontal nach links. Drehmoment –Drehzahl- und Strom-Kennlinie eines Drehstromasynchronmotors für verschiedene Läuferwiderstände ________________________________________ Mit den Drehmomenten verschiebt sich auch ______________________________ und damit der ______________________________________, so dass der Motor einen _________________________________________________aufnimmt. Merksatz: Durch die angeschlossenen Zusatzwiderstände im Läuferkreis (Anlasswiderstände) werden ________________________________________________________ ________________________________________________________ _______________________________________________________________ _______________________________________________________________ __________________________________________ X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2.2.1 2-4 Schaltungsmöglichkeiten: Über die Schleifringe des Schleifringläufers wird ein einstellbarer dreisträngiger Widerstand zugeschaltet. Die einzelnen Stufen lassen sich durch _____________________ oder ___________________________ anwählen. (Siehe Bild 2 S.435 Europa Lehrmittel) Bild1: ____________________ Bild2: _____________________ _________________________ _________________________ _________________________ _________________________ Zu Bild2. Mit Mitteln der Leistungselektronik lässt sich eine kontaktlose, stetige Einstellung des Läuferstandes erreichen. Der dreiphasige Läuferstrom wird dabei ____________________ und danach einem __________________________zugeführt. Die Drossel dient zur Glättung des Gleichstromes Id. Parallel zum Festwiderstand liegt ein _______________________. Ist dieser geöffnet, so ________________ über den Widerstand, bei geschlossenem Schalter ist _______________________. Durch _______________________________ des Schalters S lässt sich somit _________________________ im Läuferkreis und damit ____________________________ des Asynchronmotors steuern. 2.2.2 Leistungsbilanz bei Drehzahlsteuerung durch Läuferwiderstände: Der entscheidende Nachteil dieser Steuermethode liegt ________________________ _____________________________________________________________ X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-5 Das nebenstehende Bild zeigt ________________ ___________________ bei der Drehzahlsteuerung durch Läufervorwiderstände. ____ ist die über den Luftspalt ________________________________________________ Für den Bemessungsbetrieb, d.h. _________ ergibt sich die Leistungsbilanz nach der ______________________________. Die Luftspaltleistung PLN teilt sich dabei in die ______________________________und die im Läufer _______________________________________________________ auf. Wird ein Vorwiderstand Rv zugeschaltet, so ________________________ und man erhält die _________________________________________. Für Dauerbetrieb und über einen größeren Bereich ist die Drehzahleinstellung über Läuferwiderstände daher ________________. Sie wird jedoch dort angewandt, wo__________________ _____________________, wie z.B. bei_________________________________ verlangt werden. 2.2.3 Abhängigkeit des Drehmomentes von der Läuferdrehzahl bei unterschiedlichen Läuferwiderständen. (Ergebnisse aus dem Versuch) Drehzahlsteuerung bei Schleifringläufern durch Zuschalten von Widerständen in den Läuferkreis Aus dem Bild ist ersichtlich, dass dieses Drehzahlsteuerungsverfahren _____________ _____________________________________________________________ X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-6 2.3 Drehzahlsteuerung beim DASM durch Verändern der Polpaarzahl Nach der Gleichung ist erkennbar, dass die Drehfelddrehzahl im Ständer bei konstanter Frequenz f sich _______________________________________________ _______________________________________________ Es gilt somit: Beispiel 1: a) Bestimme die Drehfelddrehzahl eines 4 poligen Drehstrommotors an einem 50HzDrehstromnetz? b) Bestimme die Drehfelddrehzahl eines 8 poligen Drehstrommotors an einem 50HzDrehstromnetz? Beispiel 2: a) Bestimme die Motordrehzahl des 4 poligen Drehstrommotors mit einem Schlupf von 4%. (f = 50Hz) b) Bestimme die Motordrehzahl des 8 poligen Drehstrommotors mit einem Schlupf von 4%. (f = 50Hz) Somit ist ersichtlich, dass eine Verdopplung der Polzahl eines Drehstrommotors eine Halbierung der Drehfelddrehzahl und der Motordrehzahl mit sich bringt. Bemerkung: Es gilt allgemein: X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM = 2-7 oder Am Leistungsschild des Drehstrommotors wird jeweils die Polzahl angegeben: Übersicht: Bei f = 50Hz sind die in der Tabelle angegebenen Drehfelddrehzahlen möglich: p 1 ns in min-1 Die effektiven Läuferdrehzahlen n liegen um die Schlupfdrehzahl ∆n = ns - n unter den in der Tabelle angegeben Werten. Man unterscheidet zwischen zwei Arten der Drehzahlsteuerung durch Verändern der Polpaarzahl: • • 2.3.1 DASM mit getrennten Wicklungen Es werden Motoren mit bis zu 3 unterschiedlichen Ständerwicklungen mit 3 unterschiedlichen Polpaarzahlen gebaut. Diese unterschiedlichen Polzahlzahlen ergeben somit jeweils eine andere Drehfelddrehzahl. Die Klemmen der einzelnen Ständerwicklungen werden zum Klemmbrett geführt. Mittels eines Drehschalters (Nockenschalter) oder mit Hilfe von Schützen werden die verschiedenen Ständerwicklungen an das Drehstromnetz angeschlossen. Die Bezeichnung Polumschaltbare Motoren beruht darauf, dass durch Umschalten über Schalter verschiedene Polzahlen am Motor und somit Motordrehzahlen gewählt werden können. Beispiel eines polumschaltbaren Motors mit zwei getrennten Ständerwicklungen X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-8 Polumschaltbarer Motor mit zwei getrennten Ständerwicklungen Klemmenbezeichnungen: Für p = 8: 1U 1V 1W niedrige Drehzahl Für p = 6: 2U 2V 2W hohe Drehzahl Das Verhältnis der Polpaarzahlen beträgt in diesen Fall bzw. Das Verhältnis der Drehfelddrehzahlen beträgt in diesen Fall wegen n s ≈ 1 : p Bemerkungen: • Die Ständerwicklungen sind stets in Stern geschaltet. Bei einer Dreieckschaltung würden in den nicht in Betrieb befindlichen Ständerwicklungen Induktionsströme fließen, welche den Motor unnötig erhitzen würden. • Das Drehmoment ist bei beiden Drehzahlen etwa gleich, die Leistungen des Motors verhalten sich etwa wie die Drehzahlen. • Die polumschaltbaren Motoren mit getrennten Wicklungen werden dort eingesetzt, wo das Drehzahlverhältnis 1:2 nicht genutzt werden kann. Schaltkurzzeichen: Polumschaltbarer Drehstrommotor mit getrennten Wicklungen p = 3 resp. 2 2.3.2 DASM mit Dahlander - Wicklung Bei der Dahlanderschaltung ist nur eine dreiphasige Ständerwicklung erforderlich. Jeder Wicklungsstrang ist allerdings in zwei Wicklungshälften aufgeteilt. Durch Umschaltung werden die Wicklungshälften entweder in Reihe oder parallel geschaltet. Bei der Umschaltung von der Reihenschaltung zur Parallelschaltung wird die Polzahl halbiert und 1 die Drehfelddrehzahl nach n s ≈ verdoppelt. p Es ergeben sich somit zwei Schaltungsmöglichkeiten: X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM • 2-9 Dreieckschaltung ∆ (Reihenschaltung der Wicklungshälften) Klemmenanschlüsse: L1 → L2 → L3 → → • ________________________ Doppelsternschaltung Υ Υ (Parallelschaltung der Wicklungshälften) Klemmenanschlüsse: L1 → L2 → L3 → Sternpunkt → → ________________________ Polumschaltbarer Motor mit Dahlanderwicklung (Dreieck-Doppelstern) Wirkungsweise: X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-10 Im oben stehenden Bild ist die Darstellung des Wicklungsstranges 1U-1V, unterteilt in die zwei Wicklungshälften 1U-2V und 2V-1V. Zum Vergleich werden die Stromverhältnisse zu einem Zeitpunkt betrachtet, zu dem die Spannung an L2 gegenüber L1 und dem Sternpunkt positiver ist. Es entstehen die im Bild dargestellten Magnetfelder. Bei der Dreieckschaltung entstehen 4 Magnetpole, d.h. p = 2 Bei der Doppelsternschaltung entstehen 2 Magnetpole, d.h. p = 1 Merke: Bemerkungen: • Das Drehmoment ist bei beiden Drehzahlen etwa gleich. • Die Leistung des Motors bei der hohen Drehzahl beträgt wegen reduzierten Spannung (200V pro Wicklungshälfte am 400V-Netz) nur den 1,5 fachen Wert der Leistung bei der niedrigen Drehzahl (230V an den parallel geschalteten Wicklungshälften). Einsatzgebiete: Wegen dem gleich bleibenden Drehmoment bei den beiden Drehzahlen eignet sich die Schaltung besonders für Antriebe mit konstantem Drehmoment, z.B. Werkzeugmaschinen Schaltkurzzeichen: X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-11 Polumschaltbarer Drehstrommotor mit Dahlanderwicklungen p = 2 resp. 1 2.4 Drehzahlsteuerung beim DASM durch Verändern der Ständerspannung Bei dem Drehstromasynchronmotor ist das Kippdrehmoment MK proportional zum Quadrat der Ständerspannung, d.h.: Der Kippschlupf sK bzw. Kippdrehzahl nK bleibt unverändert Bei Halbierung der Ständerspannung zum Beispiel verringert sich das Kippdrehmoment auf ein Viertel des Bemessungswertes. X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-12 Drehmoment-Drehzahlkennlinie eines DASM bei Drehzahleinstellung mit Hilfe unterschiedlicher Ständerspannungen. Feststellungen: • Ist der Motor an seiner Bemessungsspannung angeschlossen ergibt sich ein Kippmoment das dem 2 fachen des Bemessungsmomentes entspricht • Ist der Motor an 70% Bemessungsspannung angeschlossen ___________ ergibt sich ein Kippmoment das nach ___________________________ nur _________ des Kippmomentes entspricht bei der Bemessungsspannung entspricht. • __________________________ leiben unverändert bei den unterschiedlichen Ständerspannungen, hier nK = 0,8·ns Wird der Motor mit einer Arbeitsmaschine mit stark drehzahlabhängigem Lastmoment ML belastet, z.B. einen Lüfter, ergeben sich für die dargestellten Kennlinien die drei Arbeitspunkte mit den Drehzahlen n1 bis n3. Feststellungen: • Wird die Ständerspannung auf 50% des Bemessungswertes gesenkt, so liegt der Schnittpunkt der Lastkurve mit der M-n-Kennlinie vor dem Kipppunkt und ein Dauerbetrieb ist nicht möglich. • Die Drehzahl lässt sich nur in einem sehr begrenzten Raum steuern. 2.4.1 Möglichkeiten zur Steuerung der Ständerspannung: • Stern – Dreieck – Schaltung Bei der Stern-Schaltung ist der Motor an 1 3 seiner Bemessungsschaltung angeschlossen. Das Drehmoment sinkt somit auf 1 ab. Es ergibt sich somit eine Drehzahlreduzierung. 3 • Drehstrommotor mit Anlasstransformator Bei Hochspannungstransformatoren verwendet man Spartransformatoren zur Spannungsreduzierung X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM • 2-13 Drehstrommotor mit Drehstromsteller Mit Hilfe von einem Drehstromsteller, antiparallel geschalteten Thyristoren in den Motorzuleitungen, kann man durch geeignete Wahl des Steuerwinkels an den Thyristoren die Spannung kontaktlos und stufenlos verstellen. Dies erlaubt somit eine stufenlose Drehzahlsteuerung. Dieses Verfahren ist besonders bei drehzahlgeregelten Antrieben geeignet. Bei kleinen Motoren werden Triac’s anstatt Thyristoren benutzt 2.4.2 Einsatzgebiete: • Im Kurzzeitbetrieb mit festgelegter Einschaltdauer, z.B. für Kurzschlussläufer-Sanftanlauf. • Drehzahlsteuerung von Arbeitsmaschinen mit stark von der Drehzahl abhängigem Lastmoment, z.B. Lüfter, Pumpen. • Drehzahlsteuerung von kleinen Motoren mit großem Läuferwiderstand, z.B. Wicklerantriebe in der Textilindustrie. X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-14 2.5 Drehzahlsteuerung beim DASM durch Verändern der Ständerfrequenz Die bisher erwähnten Möglichkeiten der Drehzahlsteuerung haben einen gemeinsamen wesentlichen Nachteil: Die Drehzahlsteuerung des Motors ist nur unterhalb der Bemessungsfrequenz 50Hz möglich. Weitere Nachteile: • Polumschaltbare Motor: o ________________________________________ o ________________________________________ • Spannungs- und Schlupfsteuerung: o ________________________________________ o ________________________________________ Nach der Gleichung ist erkennbar, dass die Drehfelddrehzahl im Ständer bei konstanter Polpaarzahl p sich _____________________________________________________ _____________________________________________________ Es gilt somit: Der wesentlicher Vorteil dieser Drehzahlsteuerungsmöglichkeit besteht darin, dass Speisefrequenzen oberhalb der Bemessungsfrequenz von 50Hz ebenfalls Drehzahlen über der Leerlaufsdrehzahl bei 50Hz ermöglichen. _________________ → ________________ Worauf ist jedoch bei der Frequenzveränderung zu achten? Beim Drehstrommotor gilt die folgende Beziehung: X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-15 Φs ≈ U f d.h. der magnetische Drehfeldfluss Φs vergrößert sich beim Verringern der Frequenz. Dadurch vergrößert sich ebenfalls der Magnetisierungsstrom im Ständer, was zu höheren Verlusten der Maschinen führt. Bei vorgegebener Baugröße und Kühlung würde die Maschine unzulässig erwärmt werden. Aus dieser Ursache wird bei der Frequenzverringerung die Motorspannung im gleichen Maße verringert. Der magnetische Drehfeldfluss bleibt somit konstant. Bei fSpeise < 50Hz werden wegen der Spannungsreduzierung der Motorstrom und das Motormoment ebenfalls annähernd konstant gehalten. Wird der Motor mit Frequenzen fSpeise > 50Hz gespeist, so kann die Motorspannung jedoch nicht im gleichem Maße wie die Frequenz erhöht werden. Bei zunehmender Frequenz verringert sich der magnetische Drehfeldfluss und somit der Motorstrom und das Motormoment. Spannungskennlinie in Abhängigkeit von Speisefrequenz und Drehzahl Bemerkung: Eine zusätzliche feste Spannungsanhebung im unteren Drehzahlbereich ermöglicht eine Verbesserung der Anlauf- und Beschleunigungseigenschaften des Stromrichterantriebes. Betriebsverhalten des Drehstromasynchronmotors mit FU X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-16 Drehmoment-Drehzahlkennlinienschar eines umrichtergespeisten Käfigläufers Bei den Speisefrequenzen unterhalb der Bemessungsfrequenz von 50Hz verlaufen die Kennlinien parallel zum Verlauf des Motors bei 50Hz. Das Kippmoment bleibt konstant. Bei den Speisefrequenzen oberhalb von 50 Hz sinkt das Drehmoment des Motors infolge des geringeren magnetischen Drehflusses Φs. Dieses Drehzahlsteuerungsverfahren erlaubt unterhalb von 50Hz einen Einstellbereich von n = 0 bis n = nN bei gleichem Moment. Oberhalb von 50Hz kann die Drehzahl bis zur mechanischen Belastungsgrenze des Motors vergrößert werden. Das Moment verringert sich jedoch. X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-17 Statische Frequenzumrichter ( Genaue Wirkungsweise später ) Statische Frequenzumrichter sind dreiphasige Spannungsquellen mit variabler Frequenz. Je nach Typ sind Ausgangsfrequenzen von 200Hz möglich. Die Ausgangsleistung von Standartgeräten liegt bei 1kW bis 100kW Prinzipschaltbild eines Drehstromfrequenzumrichters mit Zwischenkreis Beim Zwischenkreisumrichter wird die Netzspannung zunächst gleichgerichtet, um danach in einem Wechselrichter in ein Drehstromsystem veränderlicher Frequenz und veränderlicher Spannung umgesetzt zu werden. Der Zwischenkreis ist als Spannungszwischenkreis ausgeführt. Einsatzgebiete: In der heutigen Industrie ist wird dieses Verfahren zur Drehzahlsteuerung in jedem Bereich eingesetzt wo Motoren mit unterschiedlichen Drehzahlen arbeiten müssen. Durch die stufenlose Steuerung ist das Verfahren einfach als Drehzahlregelung auszulegen. X2EE, TECEN X2EE_DASM_n_stud.doc Drehzahlsteuerung der DASM 2-18 Wiederholung - Vergleich Drehzahlsteuerung eines Drehstromasynchronmotors durch Verändern der Läufergrößen (Schlupfsteuerung) der Ständerspannung der Ständerfrequenz (ausschließlich für Schleifringläufer) Kippmoment ist konstant Kippmoment ~ U2 Kippmoment ist konstant Kippdrehzahl sinkt bei Verringerung der Drehzahl Kippdrehzahl ist konstant Kippdrehzahl sinkt/steigt proportional bei Verringerung/Steigerung der Drehzahl Großer Drehzahleinstellbereich Kleiner Drehzahleinstellbereich Großer Drehzahleinstellbereich n < nN (nN = Bemessungsdrehzahl bei R2 = 0) n < nN (nN = Bemessungsdrehzahl bei U = UN) n < nN und n ≥ nN (nN = Bemessungsdrehzahl bei f = 50Hz) X2EE, TECEN X2EE_DASM_n_stud.doc