Interferometrisches Tracking und Manipulation von Nanorods mit
Werbung

Dissertation zur Erlangung des Doktorgrades der
Technischen Fakultät der
Albert-Ludwigs-Universität Freiburg im Breisgau
Interferometrisches Tracking und
Manipulation von Nanorods mit
optischen Pinzetten
Markus Grießhammer
Februar 2013
Albert-Ludwigs-Universität Freiburg im Breisgau
Technische Fakultät
Institut für Mikrosystemtechnik
Dekan
Prof. Dr. Yiannos Manoli
Gutachter
Prof. Dr. Alexander Rohrbach
Prof. Dr. Margit Zacharias
Datum der Disputation
13. Juni 2013
Zusammenfassung
Nanorods sind stäbchenförmige Nanopartikel und weisen bedingt durch deren Größe und
Form außergewöhnliche physikalische Eigenschaften auf, die für viele Anwendungen
vorteilhaft sind. Die Verwendung einzelner Nanorods als Bausteine, um aus denselben
eine funktionelle Struktur aufzubauen, stellt eine große Herausforderung dar. Bausteine
dieser Größenordnung sind zum einen schwer lichtmikroskopisch zu sehen und
andererseits schwer zu handhaben.
Diese Arbeit beschäftigt sich mit der Manipulation und dem Tracking von Nanorods.
Dazu wurde ein experimenteller Aufbau mit integrierter optischer Falle konstruiert. Eine
optische Falle ist ein prädestiniertes Werkzeug, um (sub-)mikrometergroße Partikel zu
fangen. ZnO Nanorods mit einem Durchmesser von etwa 0.1µm und wenigen
Mikrometern Länge konnten in einem wässrigen Medium gefangen, translatiert und
orientiert und auf einem Substrat abgesetzt werden. Das reversible Umschalten eines
gefangenen Nanorods von vertikaler in eine horizontale Lage und das Ausrichten in der
Horizontalen wurde demonstriert.
Im Hauptteil der Arbeit wurde das Tracking von Nanorods untersucht. Diese unterliegen
der Brownschen Bewegung, welche sich durch Fluktuationen in der Position und der
Orientierung auszeichnet und auch innerhalb einer optischen Falle vorliegt. Mithilfe des
Trackings kann ein Nanorod bzw. dessen genaue momentane Raumlage beobachtet
werden. Das interferometrische Tracking von (sub-)mikrometergroßen Kügelchen in
optischen Fallen ist etabliert und funktioniert mit nanometergenauer Präzision und hoher
zeitlicher Auflösung. Hingegen gibt es kein entsprechendes Verfahren, das für
asphärische Partikel geeignet ist und zugleich unabhängig von der Position des Partikels
in der optischen Falle Information über dessen Orientierung gibt. Auf der Basis von
Berechnungen zur Lichtstreuung eines Nanorods in einer optischen Falle und der
kohärenten Überlagerung von gestreutem und ungestreutem Licht wurde ein
Trackingverfahren zur Raumlagebestimmung eines Nanorods entwickelt und analysiert.
Darüber hinaus wird in dieser Arbeit ein zweites, neues Trackingverfahren beschrieben,
welches sich für ein Nanorod in einer scannenden optischen Falle eignet, einer
sogenannten Linienfalle. Das Verfahren wurde experimentell an einem ZnO Nanorod
demonstriert und analysiert.
Im Rahmen eines Kooperations-Projekts konnte des Weiteren eine Dunkelfeldeinheit mit
hoher numerischer Apertur konzipiert werden, welche in einen Aufbau mit optischer
Falle und Trackingeinheit integriert werden kann. Es wurden Prototypen realisiert und
getestet. Das Konzept ermöglicht die Vorteile der Dunkelfeldmikroskopie zur
Sichtbarmachung sehr kleiner Strukturen mit einer optischen Falle zu vereinen ohne auf
eine interferometrische Detektionseinheit zum Tracken zu verzichten.
Abstract
Nanorods are cylindrical nanoscale objects and show extraordinary physical properties
due to their size and shape, which make them useful for various applications. However, it
is a great challenge to use nanorods as building blocks to assemble functional structures.
Building blocks of this order of magnitude are hard to see with light microscopy and
difficult to handle.
This work deals with the manipulation and the tracking of nanorods. To this end an
optical tweezers setup was build. Optical tweezers are a predestined tool to operate
(sub-)micron sized particles. ZnO nanorods with a diameter of 0.1µm and lengths of a
few microns could be trapped, translated and oriented in an aqueous medium and
deposited on a substrate. Reversible switching of a trapped nanorod from a vertical to a
horizontal orientation and the alignment in a horizontal plane was demonstrated.
The main part of this work investigates the tracking of nanorods. Their movement ist
dominated by Brownian motion, characterized by translational and rotational fluctuations
that also emerge in an optical trap. With the help of the tracking the instantaneous spatial
state of a nanorod can be monitored. Whereas the interferometric tracking of
microspheres in an optical trap is well established and enables nanometer precision and
high temporal resolution, no comparable technique exists for aspherical particles. The
goal was to find a method that provides the position and the orientation of a nanorod.
Therefore the light scattering of a nanorod in an optical trap and the coherent
superposition of scattered and unscattered light was calculated and a tracking method for
nanorods was developed and analysed. In addition, a second new tracking method is
described that is useful for a nanorod in a scanning optical trap. A tracking experiment
with a ZnO nanorod in a so called line trap is presented.
In the framework of a cooperative project an illumination lens with a high numerical
aperture was designed to be integrated in an optical tweezers setup with tracking unit.
Different prototypes were realised and tested. The new concept combines dark field
microscopy to visualize very small structures and optical tweezers with interferometric
particle tracking.
Inhaltsverzeichnis
1
Einführung ................................................................................................................. 9
2
Grundlagen zu optischen Fallen ............................................................................. 13
2.1 Optische Kräfte ................................................................................................. 13
2.2 Fourier transformierende Eigenschaft einer Linse ............................................ 16
2.3 Tracking mit BFP Interferometrie ..................................................................... 16
2.4 Brownsche Bewegung im externem Potential .................................................. 19
2.4.1 Langevin-Gleichung ................................................................................ 20
2.4.2 PSD – AC – MSD ................................................................................... 20
2.5 Kalibrationsmethoden ....................................................................................... 21
2.5.1 Detektorkalibration.................................................................................. 22
2.5.2 Fallenkalibration...................................................................................... 22
3
Streutheorie .............................................................................................................. 25
3.1 Streufeldberechnung ......................................................................................... 25
3.1.1 Beschreibung im Ortsraum...................................................................... 25
3.1.2 Rayleigh-Gans Näherung ........................................................................ 26
3.1.3 Beschreibung im Fourier-Raum .............................................................. 26
3.1.4 Spezialfall Rayleighstreuer...................................................................... 29
3.1.5 Modell: ausgedehnter Streuer aus Punkten ............................................. 31
3.2 Beschreibung des Laserfokus ............................................................................ 31
4
Manipulation mit optischen Fallen......................................................................... 33
4.1 Optische Manipulation von Nanorods............................................................... 33
4.1.1 Anisotrope Hydrodynamik eines Zylinders............................................. 35
4.1.2 Verhalten von zylindrischen Partikeln in einer optischen Falle .............. 37
4.2 Experimenteller Aufbau .................................................................................... 38
4.2.1 Lasereinheit und Optische Pinzette ......................................................... 39
4.2.2 Scanspiegel .............................................................................................. 42
4.2.3 Feedback.................................................................................................. 43
4.2.4 Mikroskop und Spektrometer .................................................................. 44
4.2.5 Detektionseinheit ..................................................................................... 44
4.2.6 QPD-Signalwege ..................................................................................... 45
4.2.7 MicPy ...................................................................................................... 46
4.3 Experimente zur Manipulation von Nanorods .................................................. 46
4.3.1 Manipulation von ZnO Nanorods mit Punkt- und Linienfalle ................ 46
4.3.2 Frequenzverdopplung durch Nanorods ................................................... 50
4.4 Aufbauen funktioneller Bausteine..................................................................... 52
5
Tracking von Nanorods ........................................................................................... 55
5.1 Nanorod in einer Punktfalle .............................................................................. 59
5.1.1 Analytisches Modell zur Streuung an einem Zylinder ............................ 60
5.1.2 BFP Intensitätsverteilungen von Nanorod in Laserfokus ........................ 66
5.1.3 Algorithmus zur Signalbestimmung ........................................................ 73
5.1.4 Ergebnisse ............................................................................................... 76
5.1.5 Diskussion und Ausblick ......................................................................... 81
5.2 Kalibration ........................................................................................................ 83
5.3 Bestimmung einer statischen Orientierung ....................................................... 85
5.4 Nanorod in einer Linienfalle ............................................................................. 88
5.4.1 Modell: 1D Nanorod aufgebaut aus Rayleighstreuern ............................ 89
5.4.2 Experimentelle QPD Signale eines fixierten Nanorods .......................... 93
5.4.3 Bestimmung der Schwerpunkt- und Orientierungssignale ...................... 95
5.4.4 Experimentelle Durchführung ................................................................. 97
5.4.5 Auswertung der Messdaten ..................................................................... 98
5.4.6 Ergebnisse ............................................................................................. 101
5.4.7 Diskussion und Ausblick ....................................................................... 103
6
Entwicklung einer Dunkelfeld-Linse.................................................................... 105
6.1 Prinzip der Dunkelfeld-Mikroskopie .............................................................. 105
6.2 Konzeption einer Dunkelfeldeinheit ............................................................... 106
6.2.1 Raytracing ............................................................................................. 107
6.2.2 Beleuchtung mit LED als Weißlichtquelle ............................................ 108
6.3 Fertigung der Dunkelfeldlinse......................................................................... 110
6.4 Tests an Prototypen von Dunkelfeldlinsen...................................................... 111
6.5 Diskussion und Ausblick................................................................................. 112
7
Fazit und Ausblick ................................................................................................. 115
8
Appendix ................................................................................................................. 119
8.1 Abkürzungsverzeichnis ................................................................................... 119
8.2 Setup: Bauteile und Spezifikationen ............................................................... 120
8.3 Viskosität von Wasser ..................................................................................... 122
8.4 Konturfunktionen und Formfaktoren .............................................................. 123
8.5 Kicking Effekt ................................................................................................. 124
8.6 Interferenz mehrerer Felder............................................................................. 125
8.7 Schwerpunktbestimmung einer BFP-Intensitätsverteilung ............................. 126
9
Literaturverzeichnis .............................................................................................. 129
1 Einführung
Greifen mit Licht - Optische Fallen sind ein faszinierendes Werkzeug mit Anwendungen
in der Biologie, Chemie und Physik. Licht ist nicht nur essentiell in den
Lebenswissenschaften, um sich mikroskopische Strukturen sichtbar zu machen, sondern
kann sogar zur aktiven Manipulation etwa von Viren oder Bakterien genutzt werden. Die
anwendbaren Kräfte im Piconewton-Bereich (1pN=10-12N) sind ideal geeignet, um Zellen
zu bewegen, Elemente des Zytoskeletts, wie Mikrotubuli zu krümmen, Zellmembranen
zu verformen, Organellen oder schwimmende Bakterien einzufangen oder die Kräfte von
biomolekularen Motoren auszutesten [1]. Mikrokügelchen, welche sich besonders gut
fangen lassen, können als Griffstücke verwendet werden, um Einzelmoleküle, wie etwa
DNA auseinander zu ziehen, um deren mechanische Eigenschaften zu erforschen.
Arthur Ashkin, der heute als der Urvater der sogenannten optischen Pinzette gilt, gab
kürzlich ein Interview [2] und erzählte, wie er als Student aus Spaß erstmals den
Strahlungsdruck einer Mikrowelle vermaß, wie sein erstes „PRL paper“ [3] im internen
Review Prozess abgelehnt wurde, er es dennoch erfolgreich einreichte und es später
anlässlich des hundertjährigen Jubiläums der American Physical Society als eines der
wichtigsten Studien zitiert wurde.
Seit ihrer Einführung im Jahre 1986 hat sich die klassische optische Falle [4] und deren
Anwendungen, auf Grundlage derer zwei Physik Nobelpreise (1997 und 2001)
hervorgegangen sind, stark weiterentwickelt. Eine wesentliche Erweiterung war die
Kombination mit einer interferometrischen Detektionseinheit, welche das (sub-)
nanometergenaue Tracking der Brownschen Bewegung eines optisch gefangenen
Kügelchens und das Messen von Kräften und Potentialen erlaubt, das photonische
Kraftmikroskop [5-10]. Es konnten die 3.4 Angstrom Schritte von einzelnen RNA
polymerase Molekülen aufgelöst werden, wenn diese sich von einem zum nächsten DNA
Basenpaar fortbewegen [11].
Somit kann das hochfokussierte Laserlicht einer optischen Falle sowohl zum Messen, als
auch zum aktiven Manipulieren, Halten, Bewegen und Ausüben von kalibrierten Kräften
verwendet werden [12]. Dabei liegt die Reichweite einer optischen Falle in der
Größenordnung einer Lichtwellenlänge. Seit der Einführung von beweglichen und
ansteuerbaren Spiegeln oder akusto-optischen Modulatoren können statt einer statischen
optischen Falle auch dynamische Fallen verwendet werden. Schnelles Versetzen einer
optischen Falle ermöglicht es effektiv mehrere oder ausgedehnte Fallen, wie etwa eine
Linienfalle, zu erzeugen. Mit Hilfe von spatialen Lichtmodulatoren können selbst dreidimensionale, optische Fallenlandschaften kreiert werden.
So ist die optische Pinzette ein vielseitiges Instrument zur Mikromanipulation und
Nanofabrikation. Dabei zeichnet sich die optische Falle gegenüber anderen Techniken
durch eine Reihe von Vorteilen aus. Objekte mit Größen von wenigen Nanometern bis
einigen 10µm können gefangen werden. Die optischen Kräfte können ultrapräzise
eingestellt werden und lassen sich mit sofortiger Wirkung ein und ausstellen, was auch
ein Loslassen eines gefangenen Objekts zulässt. Die optische Pinzette ist ein Instrument,
welches sich zum Erzeugen mikrofluidischer Flüsse, zum Sortieren, Organisieren, zum
Zusammenbauen und Anordnen mikroskopischer Strukturen eignet [13]. Weiterhin
können mit optischen Fallen Mikromaschinen angetrieben werden, wie etwa eine
Mikropumpe oder ein Mikropropeller. Darüber hinaus wurde von der in vitro Fertilisation
9
1 Einführung
oder intrazellulärer Operationen, wie dem Modifizieren von Chromosomen in lebenden
Zellen, berichtet [13].
Inzwischen ist die optische Falle gar ein Kaufprodukt geworden und wird von
verschiedenen Anbietern angeboten. Indessen sind noch viele Fragen offen und sicher
nicht alle Möglichkeiten ausgeschöpft. So sind zwar etwa die optischen Kräfte auf ein
Kügelchen in einer optischen Falle weitgehend erforscht. Hingegen sind aber die
optischen Kräfte auf ein zylindrisches Partikel Gegenstand aktueller Forschung. Dabei
sind etwa Stäbchen (Nanorods) oder Nanodrähte mit einem Durchmesser auf der
Nanometerskala und Längen bis zu einigen Mikrometern durch deren quasi 1D Struktur
besonders interessante Objekte.
Diese Arbeit beschäftigt sich mit dem Tracking und der Manipulation von Nanorods mit
optischen Pinzetten. Dabei ist die Arbeit von der Vision geleitet sich Nano-Partikel als
Bausteine verfügbar zu machen, aus welchen funktionelle, drei-dimensionale Strukturen
aufgebaut werden können. Das zu realisieren ist eine Herausforderung. Um
stäbchenförmige Bausteine gezielt zusammenfügen zu können, muss neben deren
Position zudem deren Orientierung bekannt sein. Weiterhin sind sehr kleine Strukturen
lichtmikroskopisch schwer zu beobachten, was spezielle phasen- oder Streulicht-selektive
Techniken erforderlich macht.
Erstmals werden Methoden zum 5D-Tracking eines Nanorods in einer optischen Falle
präsentiert. In verschiedenen Manipulations-Experimenten wird demonstriert, wie
Nanorods mit Hilfe von optischen Fallen gefangen, orientiert und abgesetzt werden
können. Daneben wird eine neuartige Linse vorgestellt, welche die schwierig vereinbare
Kombination von Dunkelfeldmikroskopie zur direkten Sichtbarmachung nanoskaliger
Objekte und einer optischen Pinzette mit Detektionseinheit ermöglicht.
Leitfaden der Arbeit
In Kapitel 2 Grundlagen zu optischen Fallen werden zunächst die optischen Kräfte
eingeführt, um zu erklären, weshalb Partikel in einem homogenen Medium mit einer
optischen Pinzette gefangen werden können. Weiterhin werden die Grundlagen zum
interferometrischen Tracking eines gefangenen sphärischen Partikels in einer optischen
Falle vermittelt.
In Kapitel 3 Streutheorie geht es darum, wie die Lichtstreuung an kleinen Partikeln
berechnet werden kann. Dabei wird eine explizite Schreibweise eingeführt, welche die
Raumlage eines asphärischen Streuers berücksichtigt. Es wird auf die Eigenschaften eines
hochfokussierten Laserstrahls eingegangen. Die theoretischen Überlegungen sind wichtig
für ein Verständnis der neu entwickelten Trackingmethoden.
Das Kapitel 4 Manipulation mit optischen Fallen fokussiert auf die optische
Manipulation von Nanorods und geht auf die anisotrope Hydrodynamik solcher
stäbchenförmiger Partikel ein. Weiterhin wird der experimentelle Aufbau geschildert, der
im Rahmen dieser Arbeit aufgebaut wurde. Die Manipulations-Experimente mit
Nanorods und mit in situ zusammengesetzten Bausteinen werden beschrieben und
diskutiert.
Das Kapitel 5 Tracking von Nanorods beschreibt zum einen eine neu entwickelte
Methode, wie die Raumlage eines Nanorods in einer Punktfalle getrackt werden kann.
Die theoretischen Trackingsignale eines Nanorods werden analysiert und die Methode
diskutiert. Weiterhin wird auf die Kalibration von Trackingsignalen eines Nanorods
eingegangen. Zum anderen wird eine zweite neue Methode beschrieben und
10
experimentell demonstriert, die zum Tracken der Raumlage eines Nanorods in einer
Linienfalle dient. Die Ergebnisse werden gezeigt und die Methode diskutiert.
In Kapitel 6 Entwicklung einer Dunkelfeld-Linse wird das Prinzip der DunkelfeldMikroskopie aufgegriffen. Darauf aufbauend wird die Konzeption und Realisierung einer
Dunkelfeld-Linse mit Beleuchtungseinheit für den Einbau in ein optische Fallen Setup
geschildert. Die Testergebnisse eines Prototyps werden präsentiert. Das Kapitel endet mit
einer Diskussion und einem Ausblick.
In Kapitel 7 Fazit und Ausblick werden die wichtigsten Ergebnisse dieser Arbeit
zusammengefasst und kommentiert.
11
2 Grundlagen zu optischen Fallen
Der US Amerikaner Arthur Ashkin gilt als der Urvater der optischen Falle [2], welche
1986 vorgestellt wurde [4]. Hochfokussiertes Laserlicht kann zum Fangen oder bildlicher
gesprochen zum Greifen von Partikeln verwendet werden. So hat sich ebenfalls der
Begriff der optischen Pinzette (engl. optical tweezers) etabliert. Optische Pinzetten haben
sich längst als ein wichtiges Instrument in der Forschung bestätigt [14] und liefern die
Basis für diese Arbeit.
In diesem Kapitel wird zunächst auf optische Kräfte eingegangen, welche die
Funktionsweise einer optischen Falle erklären. Im Anschluss werden die Grundlagen zum
Partikeltracking mittels BFP Interferometrie geschildert, und es wird die Bewegung eines
Partikels in einer optischen Falle betrachtet. Zuletzt wird auf die Kalibration von
Positionssignalen eingegangen, welche bei der BFP Interferometrie gewonnen werden.
2.1 Optische Kräfte
Mit einer optischen Falle macht man sich zu Nutze, dass Licht Kräfte auf ein Partikel
ausüben kann [4]. Die Kräfte, die mit der Wechselwirkung von Licht und Materie
einhergehen, können auf zwei verschiedene Weisen physikalisch erklärt werden,
strahlengeometrisch und elektromagnetisch.
Fällt Licht auf eine Fläche , wirkt ein Strahlungsdruck bzw. eine optische Kraft auf
diese.
(2.1)
mit einfallender Lichtleistung mit Intensität , Brechungsindex des Mediums ,
Vakuumlichtgeschwindigkeit und Druckeffizienz . Für eine vollständige
Lichtabsorption bzw. Reflexion der Fläche geht die Druckeffizienz als ein Faktor 1 bzw.
2 ein, gemäß einfacher bzw. doppelter Impulsübertragung. Beispielsweise kann ein Strahl
mit einer Leistung von 3mW eine Kraft von F=P/c=10 pN ausüben.
Für einen großen Streuer, dessen Ausdehnung ≫ der Wellenlänge ist, kann man
sich die Impulsübertragung strahlengeometrisch überlegen [15]. Dazu betrachte man das
auf einen Streuer einfallende Licht als Strahlen. Aufgrund von Strahlablenkung durch
einen Streuer ergeben sich Impulsänderungen proportional zu , mit
Wellenvektoren und , welche in Ausbreitungsrichtung des einfallenden und
austretenden Strahls zeigen. Die Impulsänderungen können zu einer Gesamtkraft
aufsummiert werden. Die Gesamtkraft kann in zwei Komponenten
aufgeteilt werden. Die Gradientenkraft , die senkrecht auf einen einfallenden Strahl
steht und die Streukraft , die in Richtung eines einfallenden Strahls zeigt.
13
2 Grundlagen zu optischen Fallen
z
Fallenzentrum
x
Fokuszentrum
Laser
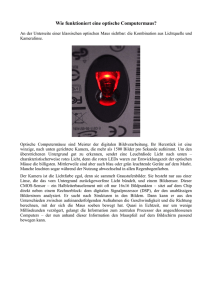
Abb. 2.1 Partikel in Laserfokus. Auf ein Partikel mit Schwerpunktposition in einem
Laserfokus wirkt eine optische Kraft . Die optische Kraft setzt sich aus einer
Gradienten- und einer Streukraft zusammen, und . Das Partikel wird zum
Fallenzentrum gezogen, welches aufgrund der Streukraft um Δ in Propagationsrichtung
des Lasers gegenüber des Fokuszentrums (Ursprung des Koordinatensystems)
verschoben ist.
In dieser Arbeit wurde hingegen mit Partikeln experimentiert, deren Ausdehnung im
Bereich der Wellenlänge des Lasers mit = 1064nm lag oder kleiner war. Hier gilt
keine Strahlenoptik mehr. Das Licht wird in Form von elektrischen und magnetischen
Feldern beschrieben. Daraus lassen sich elektromagnetische Kräfte ableiten. Der typische
Ansatz [16-18] die optische Kraft zu berechnen ist durch Integration des Maxwell‘schen
Spannungstensors [19], S. 261 über eine den Streuer umschließende Fläche. Eine andere
Möglichkeit bietet die diskrete Dipole Näherung (engl. discrete dipole approximation,
DDA). Dabei wird das Partikel, an welchem das einfallende Licht streut, als ein
Dipolgitter diskretisiert. Die auf das Partikel wirkenden Kräfte und Drehmomente werden
durch Summation der Beiträge der einzelnen Dipole erhalten [20-22]. Eine weitere
alternative Beschreibung zur Berechnung der optischen Kräfte, welche hier aufgegriffen
wird, lieferten Rohrbach et al. [23, 24].
Die Materie wird durch das einfallende elektrische Feld polarisiert. Im Rahmen der
linearen Optik sei hier nur der lineare Zusammenhang zwischen dem elektrischen Feld
und der elektrischen Polarisation berücksichtigt. Die Ladungen der Atome werden zu
Schwingungen angeregt und induzieren wiederum elektromagnetische Felder. Die
Gesamtfelder wechselwirken mit den Dipolen. Dabei treten Coulomb- und Lorentzkräfte
auf.
Das lokale elektrische Feld !, bestehend aus einfallendem und Polarisationsfeld, wirkt
auf ein Volumenelement des Streuers und erzeugt ein Dipolmoment
% '
" # $
&!
(2.2)
mit elektrischer Feldkonstante # , Brechungsindex $ des Mediums und Polarisierbarkeit
' , welche i. A. ein Tensor ist. Für einen isotropen, dielektrischen Streuer ist die
&
Polarisierbarkeit skalar und reell und lautet gemäß der Clausius-Mosotti Gleichung
( 3*
14
+% 1
+% 2
(2.3)
mit Volumen V, Verhältnis der Brechungsindizes + /$ , wobei und $ die
Brechungsindizes des Streuers und des Mediums sind.
Auf einen Dipol mit Dipolmoment " in einem elektrischen und einem magnetischen Feld,
! und /, wirkt eine elektromagnetische Kraft 0$ , die sich aus Coulomb und
Lorentzkraft zusammensetzt.
5"
0$ 1"23! 4 7 /8
56
(2.4)
Setzt man Gl. (2.2) in Gl. (2.4), verwendet die Identität 1!23! 9:2!% ! 7 1; 7 !3
<
und die Maxwell-Faraday Gleichung ; 7 ! < /, so folgt
%
0$ # $
Re ?( @%2!% A
5
1! 7 /3BC
56
2.5
)
Integriert man die Kraftdichte D /* über das Volumen * des Streuers, erhält man die
gesamte optische Kraft , die auf den Streuer wirkt.
%
%# $
ReE( F G %2|!|% IJ K
A
L
A
2.6
)
wobei der zweite Term aus Gl. (2.5) durch zeitliche Mittelung verschwindet und sich mit
dem Ansatz M M1N, 63 PQRM1N3Q S T der Faktor 9: ergibt. Ferner ist ( (/*.
Das lokale Feld ! ! ! setzt sich aus dem einfallenden und dem gestreuten Feld, !
und ! , zusammen. Daher kann die optische Kraft wieder in zwei Komponenten separiert
werden.
%
U# $
ReE( F VG 2|! |% IJ K G 21|! |% ! !∗ !∗ ! 3IJ KX
A
L
(2.7)
L
Der erste Summand wird gewöhnlich als Gradientenkraft , der zweite als Streukraft
(engl. scatter) bezeichnet. Die Gradientenkraft kann als Gradient des
Betragsquadrates des elektrischen Feldes dargestellt werden und ist daher
definitionsgemäß konservativ. Des Weiteren gilt der Zusammenhang 9:
# $ |!|%,
das Betragsquadrat des Feldes ist also proportional zur Lichtintensität. Somit kann
festgehalten werden, die Gradientenkraft wirkt entlang des Intensitäsgradienten,
zeigt also immer zum hellsten Punkt. definiert die Intensitätsverteilung des
Laserfokus als Potentiallandschaft. Ein Intensitätsmaximum bedeutet ein
Potentialminimum für den Streuer. Die Streukraft zeigt in Propagationsrichtung des
Lasers und bewirkt, dass das Fallenzentrum gegenüber dem Fokuszentrum um eine
Distanz Δ verschoben ist, siehe Abb. 2.1. Es ist bekannt, dass die optische Kraft nichtkonservativ ist [4], siehe auch [20].
15
2 Grundlagen zu optischen Fallen
Für ein sehr kleines Partikel innerhalb dessen der Intensitätsgradient 2 näherungsweise
konstant ist, folgt
%
Y U# $
ReE(F2 |NZ
A
(2.8)
Die Gradientenkraft ist direkt proportional zum Intensitätsgradienten am Ort des
Streuers.
Zudem kann Licht auch ein Drehmoment auf ein Partikel ausüben. Voraussetzung dafür
ist eine Form- oder Brechungsindex Anisotropie des Partikels. Bereits 1936 konnte Beth
[25] zeigen, dass Licht ein Drehmoment auf ein doppelbrechendes Plättchen ausübte.
2.2 Fourier transformierende Eigenschaft einer Linse
Im Allgemeinen wirkt eine Linse als Fourier Transformator. Der Zusammenhang von der
Feldverteilung in der Fokusebene einer Linse und der Feldverteilung in dessen hinterer
Brennebene kann mit einer Fourier Transformation beschrieben werden [26].
Die 1D Fourier und inverse Fourier Transformation [ und [ \A vom Ortsraum in den
k-Raum und umgekehrt seien definiert als
g
[]^1_3` ^a1bc 3 d ^1_3Q_e1fbc _3I_
[ \A h^a1bc 3i ^1_3 \g
g
1
d ^1_3Q_e1fbc _3Ibc
2j \g
(2.9)
(2.10)
Anschaulich gesprochen ist die Fourier Transformation einer Funktion ^1_3 im Ortsraum
die Zerlegung dessen in ebene Wellen mit komplexer Amplitude. Abhängig von der
Raumfrequenz bc enthält die Fourier Transformierte ^a1bc 3 die Information von
Amplitude und Phase der entsprechenden ebenen Welle.
Wendet man eine Fourier Transformation auf eine elektrische Feldverteilung an, ergibt
dies eine Funktion im k-Raum. Die tatsächliche Feldverteilung in der hinteren
Brennebene einer Linse hängt von Ortsvariablen x‘,y‘,z‘ eines gestrichenen
Koordinatensystems ab. Die folgende Gleichung beschreibt die Umrechnung.
%z
.
| y3
wobei xy 1{
M1_ k , l′3 1
Mn obc , bp q|rs Ztucv ,rw Ztupv
f ^
(2.11)
Die endliche Apertur einer Linse ist nicht berücksichtigt.
2.3 Tracking mit BFP Interferometrie
Die BFP Interferometrie in Kombination mit einer optischen Falle ist eine etablierte
Technik [9], um die Fluktuationen eines Beads (Mikrokügelchen) in einer optischen Falle
zu tracken, also den momentanen Ort des Partikels aufzuzeichnen.
16
Hierzu wird, wie in Abb. 2.2 gezeigt, das Laserlicht aus der optischen Falle eingefangen
und damit ein Sensor beleuchtet. Dieses besteht aus dem ungestreuten Licht der optischen
Falle und dem am Partikel vorwärts gestreuten Licht. Beide Komponenten können
interferieren. Auf dem Sensor entsteht ein Interferenzmuster, welche von der Lage des
gefangenen Partikels im Fokus abhängt. Aus diesem Muster kann die momentane
Partikelposition bestimmt werden. Weil der Laserfokus aus Teilstrahlen besteht, die aus
verschiedenen Richtungen kommen, kann auch die axiale Position bestimmt werden.
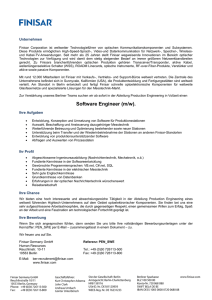
Abb. 2.2 Schema zur BFP Interferometrie für die Positionsbestimmung eines Beads in
einem Laserfokus. Das einfallende Licht wird am Partikel gestreut. Ungestreutes und
vorwärts gestreutes Licht werden von einer Detektionslinse (DL) eingefangen und
} und !
} sind eingezeichnet. Die
interferieren. Die Phasenfronten der Fernfelder !
Detektion mittels einer Quadrantenphotodiode (QPD) findet in der hinteren Brennebene
(engl. back focal plane, BFP) der Detektionslinse statt. Man erhält die drei Positionssignale
Sx, Sy, Sz. Die Objektivlinse (OL) und die Detektionslinse bilden ein 4-f System, deren
Brennweiten fOL und fDL sind eingezeichnet. Das Inset zeigt ein Bead mit Positionsvektor b
bzgl. des Koordinatensystems mit Ursprung im Fokuszentrum.
Die BFP Interferometrie zum Partikeltracking ist sehr elegant, weil als Sensor ein
Detektor mit vier Quadranten genügt. Das Interferenzmuster muss nicht fein aufgelöst
werden. Eine Integration der positions-empfindlichen Intensitätsverteilung über die vier
einzelnen Quadranten reicht aus. Man erhält drei Signale ~c , ~p , ~ für die entsprechenden
Auslenkungen c , p , eines Beads im Fokus. Da die Detektorsignale mit hoher
Frequenz ausgelesen werden können (~einige MHz), ist eine sehr hohe zeitliche
Auflösung möglich.
Orthogonalität und Linearität der Signale
Für kleine Beads und kleine Auslenkungen sind die drei Detektionssignale für die
Auslenkungen in x-, y- und z-Richtung in guter Näherung orthogonal, also voneinander
unabhängig und linear. Hier gilt
17
2 Grundlagen zu optischen Fallen
c
~c
0
V~p X Y 0 V
~
~
c
X Vp X
p
(2.12)
' . Diese muss bestimmt werden, siehe hierzu Abschnitt 2.5
mit Kalibrationsmatrix
Kalibrationsmethoden.
Ein analytisches Model für die laterale bzw. 3D Positionsbestimmung mittels BFP
Interferometrie findet sich in Ref. [27, 28], sowie eine neuere Studie bzgl. der axialen
Richtung in Ref. [29]. Typische Signalkurven für ein Bead, das lateral bzw. axial
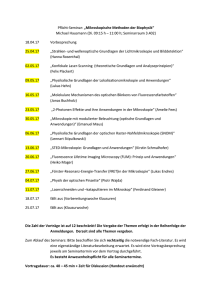
ausgelenkt wird sind in Abb. 2.3 dargestellt.
a)
b)
HL
0.0330
0.06
0.0325
0.04
0.0320
0.02
0.0315
- 1.0
- 0.5
0.5
- 0.02
1.0 λ
Sz0
0.0310
- 0.04
0.0305
- 0.06
-2
-1
1
2λ
Abb. 2.3 Signalkurven (in a. u.) eines Beads für laterale und axiale Auslenkungen (in
Einheiten einer Wellenlänge λ) bzgl. des Fokuszentrums. Die linearen Signalbereiche sind
hervorgehoben. a) ~c 1c 3 Signal mit Verlauf durch (0,0). b) Das ~ 1 3 Signal zeichnet sich
durch einen Offset ~ aus.
Detektion
Die Detektion der BFP-Interferometrie findet, wie der Name bereits verrät, in der
hinteren Brennebene (engl. back focal plane, BFP) einer Detektionslinse statt. Der Sensor
ist eine bzw. sind zwei Quadranten Photodioden (QPD), alternativ werden auch optische
Positionssensoren (engl. position sensitive device, PSD) [30] verwendet. Sie stehen in
einer zur Fokusebene reziproken Ebene (BFP), welche in Propagationsrichtung liegt. Die
QPD Signale ergeben sich als Summen- und Differenzsignale, wie aus Abb. 2.4
hervorgeht.
S1
A1
A2
A3
A4
ky
kx
S3
S2
S4
Abb. 2.4 Quadrantenphotodiode (QPD) in kxky-Ebene. Durch Integration der einfallenden
Intensität über die Quadrantenflächen A1 bis A4 ergeben sich die Quadrantensignale S1
bis S4. Eine elektronische Verschaltung kombiniert diese zu den drei Signalen ~c , ~p und
~ , wie sie für das Tracking mittels BFP Interferometrie verwendet werden.
18
Idealerweise werden zwei QPDs verwendet, da für die lateralen Signale ~c , ~p eine
höhere numerische Apertur NAdet, hingegen für das axiale Sigal ~ eine niedrigere NAdet
von Vorteil ist [29, 31]. Typischerweise wird die QPD2 zur axialen Positionsbestimmung
entsprechend überstrahlt, siehe Abschnitt 4.2.
Das Signal ~ 13 eines Quadranten ergibt sich aus der Integration der einfallenden
Intensität aobc , bp , q über die jeweilige Fläche mit Index 1, … ,4.
~ 13 aobc , bp , qIbc Ibp
(2.13)
Die positions-empfindliche Intensitätsverteilung aobc , bp , q in der BFP ergibt sich aus
der kohärenten Überlagerung des ungestreuten und des gestreuten Feldes, Mn obc , bp q und
Mn obc , bp , q, mit Partikelposition b. Sie berechnet sich aus dem Betragsquadrat beider
Fernfelder. Die Detektion findet in der BPF statt. Insofern bietet sich eine Beschreibung
im Fourier-Raum (auch mit k-Raum bezeichnet) an.
BFP-Intensitätsverteilung
Die Intensitätsverteilung in der Detektorebene lässt sich ganz allgemein mit der
Zweistrahl-Interferenz-Formel ansetzten
Es folgt
%
aobc , bp , q Mn obc , bp q Mn obc , bp , q
%
%
aobc , bp , q Mn obc , bp q Mn obc , bp , q
2Mn obc , bp qMn obc , bp , q
hΔΦobc , bp , qi
ΔΦobc , bp , q Φ obc , bp q Φ obc , bp , q
(2.14)
(2.15)
(2.16)
Die Modulationsfrequenz im Interferenzterm ist gegeben durch die Phasendifferenz
ΔΦobc , bp , q von gestreutem und ungestreutem Feld.
2.4 Brownsche Bewegung im externem Potential
In dieser Arbeit wird ein Schwerpunkt auf das Tracking von zylindrischen Partikeln
gelegt. Dieser Grundlagenabschnitt ist der Theorie gewidmet, welche die Bewegung eines
isotropen Partikels in einem homogenen, viskosen Medium und in einem externen
Potential beschreibt, was in guter Näherung der Situation eines Beads entspricht, welches
in Wasser in einer optischen Falle gefangen ist. Die Beschreibung wird sehr viel
komplexer für asphärische Partikel, siehe hierzu 4.1.1 und 4.1.2.
19
2 Grundlagen zu optischen Fallen
2.4.1
Langevin-Gleichung
Die Brownsche Bewegung kann mit der Langevin-Gleichung formuliert werden. Im
skalaren Fall lautet die Differentialgleichung für die zeitabhängige Ortskoordinate x(t)
eines Teilchens mit Masse m, Reibungskraft _ 163, mit Reibungskoeffizient und
der statistischen, thermischen Kraft Fth(t)
+_ 163 _ 163 163
(2.17)
+_ 163 _ 163 _163 163
(2.18)
% +_13 f_13 _13 n 13
(2.19)
Diffundiert ein gefangenes Partikel im Potential W(x) einer optischen Falle, wirkt eine
zusätzliche optische Kraft Fopt = - W(x)/dx. Für kleine Auslenkungen x(t) kann man ein
harmonisches Potential W(x) = 1/2 κ x2, mit Fallensteifigkeit κ und demzufolge die
lineare Kraft Fopt = - κ x annehmen. Die Langevin-Gleichung wird zu
Mit Exponentialansatz x(t) ~ exp(iωt) und Fourier Transformation folgt
Die Lösung der Gleichung im Frequenzraum lässt sich sofort hinschreiben
_13 n 13
+ % f
(2.20)
Eine rein rotatorische Diffusion kann analog zu Gl. (2.19) als Gleichung von
Drehmomenten, beschrieben werden.
163 163 163 163
(2.21)
mit Trägheitsmoment , zeitabhängiger Winkelauslenkung 163, Fallensteifigkeit für
Rotation (in Nm) und statistischem, thermischen Drehmoment 163.
2.4.2
PSD – AC – MSD
Wird ein Partikel getrackt, erhält man dessen zeitlich aufgelöste Trajektorie
typischerweise in Form großer Datensätze. Um daraus physikalische Information zu
gewinnen, bieten sich eine Frequenzanalyse, Korrelationen und die Bestimmung von
Erwartungswerten an. Dazu werden im Folgenden die spektrale Leistungsdichte (engl.
power spectral density, PSD), die Autokorrelierte (engl. autocorrelation, AC) und die
mittlere quadratische Verschiebung (engl. mean square displacement, MSD) vorgestellt.
Aus obiger Bewegungsgleichung (2.20) eines Partikels in einem viskosen Medium und in
einem harmonischen Potential erhält man die spektrale Leistungsdichte (engl. power
spectral density, PSD)
%
n 13
~]_163` |_13| 1 % +3% % %
%
20
(2.22)
Für die statistische thermische Kraft ist die spektrale Kraftdichte n 13 2b [.
Wie im vorliegenden Fall von mikro- und nanoskopischen Objekten im viskosen Medium
gilt der stark überdämpfte Fall, das heißt die Masse kann vernachlässigt werden. Man
erhält
%
~13 Y
2b [
2
%
%
%
%
%
(2.23)
mit Einstein-Relation für die Diffusionskonstante b [/ und Grenzfrequenz
/ bei der die PSD auf die halbe Amplitude abgefallen ist. Die PSD mit
Dimension ]+% /` hat die Form einer Lorentz Kurve und beschreibt welche
Partikelauslenkungen mit welcher Frequenz vorkommen.
Eine weitere wichtige Größe, um Informationen aus einer statistischen Trajektorie zu
gewinnen, ist die Autokorrelierte (engl. autocorrelation, AC). Nach Wiener-KhintchineTheorem ist die AC die invers Fourier Transformierte der PSD.
]_163` [ \A ]~13` 1 g
2
b [ \ / |
d
Q \S I Q
%
%
2j \g
(2.24)
mit Autokorrelationszeit ¡ /, für die die AC auf 1/e abgefallen ist. Physikalisch
betrachtet ist ¡ die charakteristische Zeit, die ein Teilchen benötigt, um sein Potential
auszutasten.
%
Der Zusammenhang von Autokorrelierter ⟨_163_16′3⟩und MSD ⟨o_163 _16′3q ⟩ist
%
linear, wobei 6 k 6 ¡. Aus ⟨o_163 _16′3q ⟩ ⟨_163% ⟩ 2⟨_163_16 k 3⟩ ⟨_16′3% ⟩ 2⟨_163% ⟩ 2⟨_163_16′3⟩, wobei ⟨_163% ⟩ ⟨_16′3% ⟩ folgt
~]_163` 2b [
o1 Q \ ¤/¥ q
(2.25)
Die mittlere quadratische Auslenkung gibt ein Maß für die Strecke, die ein Partikel im
Mittel in einer Zeit t zurücklegt. Im harmonischen Potential ist das MSD begrenzt. Es
nähert sich für große Zeitspannen ¡ ¦ ¡ einem Sättigungswert 2b [/.
2.5 Kalibrationsmethoden
Die Trackingsignale der BFP Interferometrie werden typischer als Spannungen
aufgezeichnet und müssen daher kalibriert werden, so dass die gesuchten Auslenkungen
und in einer Längeneinheit vorliegen. Das bezweckt die Detektorkalibration. Die
Fallenkalibration hingegen bestimmt die Fallensteifigkeit, der linearen Rückstellkraft
_ eines harmonischen Potentials. Die Kalibrationsmethoden für ein Bead in einer
optischen Falle sind etabliert [32-35].
21
2 Grundlagen zu optischen Fallen
2.5.1
Detektorkalibration
Die naheliegendste Methode ist ein Kalibrationsscan. Hier wird das Testobjekt oder ein
ihm identisches fixiert und präzise mit bekanntem Verfahrweg durch den Fokus gescannt.
Die parallel aufgezeichneten Signale sind direkt und (in ihrem monotonen Bereich)
eindeutig der Raumlage zuordenbar. Dies ist für kommerziell erhältliche und spezifizierte
Beads gut umsetzbar.
Der alternative Standardansatz ist, dass man von linearen und voneinander unabhängigen
(=orthogonalen) Signalen ~ ausgeht, was für kleine Auslenkungen meist berechtigt ist.
Damit gilt für alle zu bestimmenden Koordinaten mit Index i=x, y, z die Gleichung
~
(2.26)
Für ein harmonisches Potential §1_3 _ % /2 in einer Dimension gilt des Weiteren mit
Boltzmann Verteilung, dass eine Auslenkung _ normalverteilt ist
e1_3 e Q \¨1c3/1r© ª3 e Q \¤c
: /1%r ª3
©
e Q \c
: /o%«: q
(2.27)
mit Standardabweichung ¬ 1b [/3A/% . Die Varianz ¬ % ⟨_ % ⟩ ist gleich dem
mittleren Auslenkungsquadrat. Im thermischen Gleichgewicht, was bedeutet, dass die
Aufenthaltswahrscheinlichkeitsdichte p(x) sich im zeitlichen Mittel nicht ändert, ist die
Energie für jeden Freiheitsgrad gleichverteilt. Es gilt der Gleichverteilungssatz
A
⟨_ % ⟩
%
%b [
A
(2.28)
Durch den linearen Zusammenhang gemäß Gl. (2.26) müssen entsprechend auch die
Signale ~ gleichverteilt sein. Mit ⟨~% ⟩ ¬ ′% folgt für die gesuchte
Kalibrationskonstante
¬ ′
¬
(2.29)
Die Standardabweichung ¬ ′ des Signals ~ erhält man aus einem Gauß-Fit an das
Histogramm des Signals. Um die Standardabweichung ¬ der Koordinate zu
berechnen, muss die Temperatur [ und die Fallensteifigkeit bekannt sein.
Bei dieser Methode wird der eindeutige Detektionsbereich auf den linearen
Detektionsbereich eingeschränkt, siehe Abb. 2.3.
2.5.2
Fallenkalibration
1. Langevin-Methode
Die Fallensteifigkeit kann man aus der Grenzfrequenz /der ~13 2% /1% % 3des Signals erhalten, s. Abschnitt 2.4.1. Denn die Grenzfrequenz ist
unabhängig von der Skalierung des Signals. Dazu muss das Signal Fourier-tranformiert
und Betrags-quadriert werden. Ein Lorentz-Fit an die so erhaltene Kurve gibt .
22
Alternativ kann die Fallensteifigkeit aus der Autokorrelationszeit ¡ 1/ der
1¡3 % b [/Q \/ | gewonnen werden. Dazu muss das Signal autokorreliert
werden. An die erhaltene Kurve legt man einen Exponential-Fit an und erhält ¡ .
2. Reibungskraftmethode
Hierbei lenkt man ein in einer optischen Falle gefangenes Partikel relativ zur Falle um
eine bekannte Distanz aus und misst die Relaxationszeit ¡ des Partikels auf dem Weg
zurück in die Gleichgewichtslage. Setzt man die Reibungskraft und die Rückstellkraft
gleich, so folgt für die gesuchte Fallensteifigkeit /¡. Der Reibungskoeffizient
muss bekannt sein.
23
3 Streutheorie
Das Thema der Lichtstreuung ist besonders wichtig in Zusammenhang mit optischen
Fallen. Zum einen lassen sich die optischen Kräfte (siehe Abschnitt 2.1), die auf ein
Partikel in einer optischen Falle wirken, auf die Streuung zurückführen. Zum anderen
wird beim Tracking mittels BPF Interferometrie genau die Interferenz von gestreutem
und ungestreutem Licht ausgenutzt (siehe Abschnitt 2.3). Das Streuproblem eines
Zylinders in einem hochfokussierten Feld ist zentraler Bestandteil dieser Arbeit.
In der Streutheorie werden Streuer typischerweise anhand ihrer Größe in drei Regime
eingeteilt. Partikel mit einer Ausdehnung ≪ , die viel kleiner der Wellenlänge sind,
werden als Rayleighstreuer bezeichnet. Solche für die ® gilt, nennt man RayleighGans Streuer. Partikel mit ¦ sind sogenannte Mie Streuer. Die jeweiligen
Streuverhalten sind charakteristisch und können entsprechend einem der drei Regime
zugehörig mathematisch unterschiedlich beschrieben werden. Diese Arbeit beschäftigt
sich mit der Lichtstreuung von kleinen Partikeln im Rayleigh-Gans-Regime.
Zum Lösen eines Streuproblems muss das einfallende Feld beschrieben werden, was im
Fall eines engen Laserfokus sehr anspruchsvoll ist. Ferner ist die Streuung innerhalb
eines hochfokussierten Feldes komplexer, als die Streuung an einer ebenen Welle.
Weiterhin ist die Streuung an einem asphärischen Partikel schwieriger zu berechnen, als
die an einem kugelförmigen Streuer.
3.1 Streufeldberechnung
Dieser erste Abschnitt des Kapitels beschreibt in einer Dipolnäherung, wie das lineare
Streufeld eines Partikels, das von einem einfallenden Feld erzeugt wird, berechnet werden
kann. Insbesondere wird nur der Fall elastischer Streuung betrachtet, was bedeutet, dass
die Wellenlänge des einfallenden und des gestreuten Feldes identisch ist.
3.1.1
Beschreibung im Ortsraum
Als allgemeinen Startpunkt sei die rein ortsabhängige inhomogene Helmholtz-Gleichung
des elektrischen Feldes !1N3 gewählt [36]. Diese ergibt sich aus der Wellengleichung
nach Variablenseparation von Ort und Zeit und lautet
1∆ b % 3!1N3 &
' 1N3b % !1N3
(3.1)
Gl. (3.1) beschreibt elektrische Felder im inhomogenen Raum. Die Inhomogenität kann
etwa ein Partikel bzw. ein Streuer sein. Die Form, Größe und Lage des Streuers geht mit
der Konturfunktion 1N3 ein. Im einfachsten Fall, für ein homogenes Medium und einen
Streuer aus einem homogenen Material, ist die Konturfunktion 1N3 1/* innerhalb des
' ist die
Streuervolumens V und null sonst, siehe Anhang 8.4. Die Polarisierbarkeit &
25
3 Streutheorie
lineare Antwortamplitude der Materie auf das elektrische Feld und ist im Allgemeinen
richtungsabhängig und daher ein Tensor. Einen skalaren Ausdruck für die
Polarisierbarkeit (mit Dimension ](`= m3) liefert die Clausius-Mosotti Gleichung, siehe
Gl. (2.3). Mit der Wellenzahl b 2j/ wird die Wellenlänge des Feldes im Medium
berücksichtigt, wobei /$ mit Brechungsindex des Mediums $ und
Vakuumwellenlänge . Absorption kann durch den Imaginärteil eines komplexwertigen
Brechungsindex berücksichtigt werden.
Das Gesamtfeld !1N3 ist eine Funktion, die Gl. (3.1) löst und kann in ein einfallendes
Feld ! 1N3 und ein gestreutes Feld ! 1N3 separiert werden [36].
' b % G 1N′3!1N′3°1N N′3IJ K′
!1N3 ! 1N3 ! 1N3 ! 1N3 &
(3.2)
Im Wesentlichen ist das gestreute Feld ! 1N3 eine Superposition von Kugelwellen, die
von jedem Punkt des Streuervolumens ausgehen, was sich mathematisch als eine Faltung
des elektrischen Feldes mit der Green’schen Funktion beschreiben lässt. Die skalare
Green’sche Funktion °1N3, welche eine Kugelwelle beschreibt, ist eine Lösung der
skalaren Helmholtz Gleichung mit einer delta-Distribution als Inhomogenität oder in
anderen Worten, die Systemantwort auf eine delta-Punkt-artige Störung. Die skalare
Funktion °1N3 in (3.2) kann als Fernfeldnäherung der dyadischen Green’schen Funktion
verwendet werden.
3.1.2
Rayleigh-Gans Näherung
Falls die Phasenänderung ΔΦ Lk 1 $ 3 ≪ 2j des einfallenden Feldes durch den
Streuer klein ist bzw. die Differenz der Brechungsindizes von Medium und Streuer und
dessen größte Ausdehnung L klein sind, so findet die Rayleigh-Gans Näherung oder auch
Bornsche Näherung Anwendung [37].
Das Gesamtfeld!1N′3 im Faltungsintegral von Gl. (3.2) kann durch das einfallende Feld
ersetzt werden. Man geht davon aus, dass jeder Punkt bzw. jeder Dipol innerhalb des
Streuers lokal das gleiche Feld sieht, unbeeinflusst von dem induzierten Streufeld der
benachbarten Dipole. Das genäherte Streufeld lautet
' b % o! 1N31N3q ∗ °1N3
! 1N3 &
(3.3)
mit ∗ als Notation für die Faltung.
3.1.3
Beschreibung im Fourier-Raum
Vor dem Hintergrund, dass ein Verfahren gesucht wird, mit welchem unabhängig
voneinander die Position und die Orientierung eines zylindrischen Partikels mittels BFP
Interferometrie getrackt werden kann, wird nach einer Separierbarkeit von positions- und
orientierungsabhängigen Termen im Ausdruck des Streufeldes gesucht. Im Folgenden sei
eine Formulierung für das Streufeld eingeführt, die explizit die Raumlage des Streuers
beinhaltet.
} 1, 3 im k-Raum (s. Abschnitt 2.2) ergibt sich aus Gl. (3.3) gemäß
Das gestreute Feld !
Rayleigh-Gans Näherung über das Faltungstheorem. Es folgt
26
} 1, 3 !
' b %
&
} 13 ∗ ̃ 1, 3µ
°n 13 ³!
12j3J
(3.4)
} 13 mit reellem die Ewaldkugelschale mit Radius k. Sie enthält
Dabei repräsentiert ¶
alle ebenen Wellen des Fernfeldes. Evaneszente Wellen mit komplexen klingen
exponentiell ab und werden hier nicht betrachtet, da sie mit einer Linsenoptik nicht
übertragen werden. Der generalisierte Raumlage-Vektor 1 , 3 des Streuers, setzt
sich aus dem Translationsvektor oc , p , q und dem Rotationsvektor o· , ¸ , ¹ q zusammen.
Für einen rotationssymmetrischen Streuer, dessen Position sich nicht im
Koordinatenursprung befindet, kann man folgende Notation für die Konturfunktion
ansetzten
1N, 3 1N3 ∗ º1N 3 1N 3
(3.5)
̃ 1, 3 [E1N, 3F ̃ 13Q »
(3.6)
Die Streuerposition wird mit dem Translationsvektor oc , p , q berücksichtigt.
Die Konturfunktion 1N, 3 ergibt sich aus der Konturfunktion 1N3 des Streuers in
Position = 0 durch Faltung mit der delta-Distribution gemäß Verschiebungssatz.
Die Fourier Transformierte der Konturfunktion heißt Formfaktor ̃ 1, 3 und lautet
Der Formfaktor ist eine Art Filterfunktion, die bestimmt, wie Impulse übertragen werden.
Wie in Gl. (3.6) am komplexen Exponentialterm zu sehen ist, bewirkt eine Auslenkung
des Streuers um eine Modulation des Formfaktors.
Eine Rotation des Streuers um die im Allgemeinen drei Freiheitsgrade der Rotation kann
mit Hilfe der Eulerwinkel ¼, und ½ formuliert werden. Hier sei die „y-Konvention“
gewählt. Dabei wird zunächst um den Winkel ¼ um die z-Achse gedreht, dann um den
Winkel um die neue y‘-Achse und schließlich um den Winkel ½ um die neue z‘‘Achse. Die Orientierung eines asphärischen Steuers mit den Winkeln · , ¸ und ¹ , wird
beschrieben, indem in der Konturfunktion 1N3 der Ortsvektor N mit Nk ≡ Nk 1N, 3
ersetzt wird. Analog kann beim Formfaktor ̃ 13 (für Streuer in Position 0) der k-Vektor
mit k ≡ k 1, 3 ersetzt werden. Es gilt
Nk 1N, 3 P 1¼3 ∙ Ppk 13 ∙ Pkk 1½3 ∙ N
k 1, 3 P 1¼3 ∙ Ppk 13 ∙ Pkk 1½3 ∙ (3.7)
(3.8)
13 f13 0
P 1¼3 f13 13 0,
0
0
1
13 0 f13
Ppv 13 0
1
0 ,
f13 0 13
(3.9)
mit den Euler Rotationsmatrizen
27
3 Streutheorie
1½3 f1½3 0
Pkk 1½3 f1½3 1½3 0
0
0
1
Unter Berücksichtigung von Rotation und Translation folgt für die Konturfunktion
1N, 3 bzw. für den Formfaktor ̃ 1, 3
1N, 3 ]Nk 1N, 3` ∗ º1N 3 ]Nk 1N, 3 `
̃ 1, 3 [E1N, 3F ̃ ]k 1, 3`Q »
(3.10)
(3.11)
Wie aus der Gl. (3.11) hervorgeht, gehen eine Rotation des Streuers um und eine
Translation um in die Funktion des Formfaktors ̃ 1, 3 als zwei separate Terme ein.
Die Rotation um wird ausgedrückt, indem der Formfaktor (mit Streuer im Ursprung)
̃ 13 mit ̃ 1′3, dem gedrehten Formfaktor, ersetzt wird, wobei k ≡ k 1, 3. Die
Translation um ist, wie in Gl. (3.6) in dem komplexen Exponentialterm enthalten.
Für einen homogenen Zylinder ist eine Rotation um dessen Zylinderachse nicht
unterscheidbar. Eine Drehung um ¹ , also um die eigene Achse, wird daher nicht weiter
verfolgt.
Betrachtet man die Streuung einer ebenen Welle mit Feldverteilung M 1N3 M Q \À N ,
g
ergibt sich mit Á\g Q \rÀ c Q rs c I_ 2jº1bc b 3 und skalarer Polarisierbarkeit α
Mn 13 12j3J M º1 3
Mn 13 ∗ ̃ 1, 3 M ̃ ]k 1, 3 `Q 1\À 3»
Mn 1, 3 αb %
\À » n 13̃ ]k 1,
M
3 `Q »
ÃÄQ
ÄÅÄ
ÄÆ °
12j3J
ÇÀ 1» 3
(3.12)
(3.13)
(3.14)
Aus Gl. (3.14) geht hervor, dass die Abhängigkeit der Position und der Orientierung
des Streuers separierbar sind.
Für mehrere einfallende ebene Wellen Mn 13 12j3J ∑ M , ºo , q folgt hingegen
Mn 13 ∗ ̃ 1, 3 É M , ̃ hk 1, 3 , iQ o\À,qÊ
(3.15)
Mn 1, 3 É Mn, 1, 3
(3.16)
Das gestreute Feld Mn 1, 3 setzt sich aus der Summe der Streufelder Mn, 1, 3 der
einzelnen einfallenden ebenen Wellen mit Index j, Amplitude M , und Wellenvektor ,
zusammen.
28
Mn 1, 3 αb %
°n 13Q Ê É M , Q \À, » ̃ hk 1, 3 , i
12j3J
(3.17)
Die Terme im Ausdruck des Streufeldes, die rein von der Position und die Terme, die rein
von der Orientierung des Streuers abhängen können nicht mehr einfach separiert werden.
Für ein einfallendes Feld, welches sich aus einer kontinuierlichen Verteilung von Vektoren zusammen setzt, geht die Summe in ein Integral über, ein Faltungsintegral.
Mn 13 ∗ ̃ 1, 3 G Mn 1 3̃ ]k 1, 3 `Q 1\À 3Ê IJ b
Q Ê G Mn 1 3̃ ]k 1, 3 `Q \À Ê IJ b
(3.18)
} 1, 3 ergibt sich wieder gemäß Gl. (3.4).
Das Streufeld !
Im Anhang (siehe Abschnitt 8.4) sind Konturfunktionen 1N3 und Formfaktoren ̃ 13
für verschiedene Streuerformen (Streuer in Koordinatenursprung) aufgeführt.
Im Weiteren wird auf den Spezialfall des Rayleighstreuers eingegangen, für den sich der
Ausdruck des Streufeldes deutlich vereinfacht. Im Anschluss daran wird ein Modell
eingeführt, wie die Streuung eines ausgedehnten Streuers näherungsweise durch die
Streuung einzelner Punktstreuer beschrieben werden kann.
3.1.4
Spezialfall Rayleighstreuer
In diesem Abschnitt wird entwickelt, wie sich das gestreute (Fern-)Feld eines
Rayleighstreuers am Ort in einem beliebigen Feld aus einer Amplitude und einer
Phase zusammensetzt.
Der Formfaktor für einen Rayleighstreuer im Koordinatenursprung lautet einfach
̃ 13 1
(3.19)
̃ 1, 3 Q »
(3.20)
Der Formfaktor für einen Rayleighstreuer am Ort ergibt sich nach Gl. (3.6) zu
wobei der generalisierte Raumlagevektor ≡ ist, da für einen Punktstreuer keine
Orientierung definiert ist.
Somit vereinfacht sich für einen Rayleighstreuer in einem beliebigen Feld Mn 13 der
Ausdruck für die Faltung gemäß Gl. (3.18) erheblich.
29
3 Streutheorie
Mn 13 ∗ ̃ 1, 3 G Mn 1 3̃ ] `Q 1\À 3Ê IJ b
Q Ê G Mn 1 3Q \À Ê IJ b
(3.21)
Q Ê [ \A ]Mn 1 3`|NZ» Q Ê M 1 3
Das Faltungsintegral zerfällt und es resultiert die komplexe Feldamplitude M 1 3 mit
Phase und Feldamplitude am Ort des Streuers. Denn die Faltung reduziert sich auf ein
Integral über das einfallende Feld Mn 1 3, welches genau die Form der inversen Fourier
Transformation hat. Die Abhängigkeiten von Form, Größe und einer Orientierung gibt es
für einen Punktstreuer nicht.
Das Streufeld Mn 1, 3 für den Spezialfall eines Rayleighstreuers lautet
Mn 1, 3 αb %
°n 13M 1 3Q » 12j3J
(3.22)
Separiert
man
den
Ausdruck
des
komplexwertigen
Feldes
Mn 1, 3 Mn 1, 3Q ËÌ ors ,rw ,» q gemäß Euler’scher Formel in einen Betrags- und
einen Phasenterm, so lauten diese
Mn 1, 3 |α|b %
°n 13|M 1 3|
12j3J
Φ 1, 3 arg]M 1 3` arg1( 3
(3.23)
(3.24)
Der Betrag des Streufeldes eines Rayleighstreuers trägt nur mit einem konstanten Offset
bei. Eine Auslenkung des Streuers bewirkt keine Modulation des Betrags. Es bleibt
jedoch eine k-Abhängigkeit durch die Green‘sche Funktion.
In den Betrag Mn 1, 3 des Fern-Streufeldes eines Punktstreuers geht ein
1) der Betrag |M 1 3| der komplexen AnregungsamplitudeM 1 3 am Ort des
Punktstreuers.
2) der Betrag |α| der i.A. komplexen Antwortamplitude des Streuers, der skalaren
Polarisierbarkeit (.
3) die Ewaldkugelschale °n 13. Sie erlaubt nur propagierende ebene Wellen.
Für einen Rayleighstreuer setzt sich die Phase Φ obc , bp , q des Fern-Streufeldes
zusammen aus
1) der Phase arg]M 1 3` des einfallenden Feldes mit der der Punktstreuer angeregt
wurde. Dieser Wert hängt von der Position des Punktstreuers ab.
2) einer Phasenmodulation , die auch von der Position des Punktstreuers
abhängt.
3) evtl. einer Phasenverzögerung arg]( `, sofern der Streuer eine komplexwertige
Polarisierbarkeit hat.
30
3.1.5
Modell: ausgedehnter Streuer aus Punkten
Einen ausgedehnten Streuer kann man näherungsweise durch eine Anzahl von N
homogen, diskret verteilten Punktstreuern beschreiben. In erster Näherung kann man
deren Wechselwirkung vernachlässigen. Damit profitiert man zum einen von den
Vereinfachungen, die sich bei der Streufeldberechnung für einen Punktstreuer ergeben.
Zum anderen können durch entsprechende räumliche Anordnung wesentliche
Eigenschaften des modellierten Streuers berücksichtigt werden, wie dessen Ausdehnung
und dessen Raumlage , welche sich aus der Position und der Orientierung
zusammensetzt. Für das Streufeld Mn, o, q eines einzelnen solchen Punktstreuers mit
Position kann Gl. (3.22) entsprechend verwendet werden. Das gesamte Streufeld
Mn 1, 3 des ausgedehnten Streuers wird aus der Summe der Streufelder Mn, o, q der
einzelnen Punkte gebildet. Es ergibt sich
Ð
Mn 1, 3 É Mn, o, q
Ð
(b %
°n 13É Q M o q
J
12j3
(3.25)
Beispiel Nanorod
Ein Nanorod kann als eine lineare Kette von Punkten beschrieben werden. Es bietet sich
dabei an, die Position eines jeden Punktes als die Summe aus der Schwerpunktposition
des Streuers und der relativen Lage des jeweiligen Punktes in sphärischen Koordinaten
anzugeben. So hat die Raumlage des j-ten Punktes die Form ≡ oc , p , , · , ¸ q
mit den Komponenten
c, oc , · , ¸ q c If1· 3
o¸ q
p, op , · , ¸ q p If1· 3fo¸ q
, op , · q I
1· 3
(3.26)
(3.27)
(3.28)
wobei d die Distanz zwischen zwei benachbarten Punkten ist. · , ¸ bestimmen den
Polar- und Azimutwinkel.
3.2 Beschreibung des Laserfokus
Um Streuprobleme zu lösen, um etwa optische Kräfte auf einen Streuer in einer optischen
Falle zu berechnen oder Intensitätsverteilungen in der BFP, wie in dieser Arbeit, muss
das hoch fokussierte Feld mathematisch ausgedrückt werden. In der Literatur sind
zahlreiche unterschiedliche Formeln zu finden [38]. Ein fokussierter Gaußstrahl wird
häufig etwa aus einer Basis von vektoriellen Kugelflächenfunktionen (vector spherical
wave functions) formuliert [39]. Eine alternative Beschreibung [36, 40] liefert die Fourier
Optik.
Eine in vielerlei Hinsicht für qualitative Aussagen geeignete skalare Beschreibung ist die
paraxiale Gaußformel [40, 41], mit Feldverteilung M1_, l, 3 und Phase Φ1_, l, 3.
31
3 Streutheorie
M1_, l, 3 A W \oc : Óp: q⁄¨13: Ë1c,p,3
Q
Q
§13
k1_ % l % 3
Φ1_, l, 3 k tan\A 1⁄z 3
2P13
(3.29)
(3.30)
mit Feldamplitude A , Radius W der Strahltaille in z = 0 (engl. beam waist), Strahlradius
§13 W ]1 1⁄z 3% `A/% , Wellenzahl k n2π/λ , mit Vakuum-Wellenlänge λ ,
Brechungsindex n des Mediums, Krümmungsradius der Phasenfronten P13 ]1 1 ⁄3% ` und charakteristischer Länge z k§ % /2 nach welcher der Strahlradius
auf W1z3 √2§ angewachsen ist. Nach Ref. [42] lässt sich der Radius der Strahltaille
gemäß § √2/1jÛ3 in Abhängigkeit der numerischen Apertur Û eines Objektivs
ausdrücken.
Mit dieser Formel wird ein axialer und lateraler Intensitätsgradient, sowie eine axiale
Phasenanomalie und zudem eine Phasenfrontkrümmung berücksichtigt, s. Abb. 3.1.
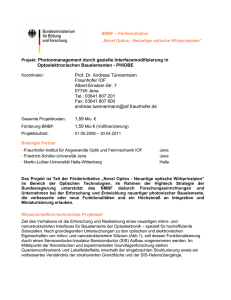
Abb. 3.1 Gaußstrahl mit Propagation in z-Richtung. Es sind die farbkodierte
Intensitätsverteilung 1, _3 |M1, _3|% und Isolinien der Phasenfronten Φ1, _3 eines
paraxialen Gaußstrahls mit Radius der Strahltaille W /2 1/2 dargestellt, sowie
Isolinien der Phasenfronten mit Φ1, _3 b einer ebenen Welle. Weiterhin sind
normierte Intensitätsprofile 1_3 und 13 des Gaußstrahls eingezeichnet. Längeneinheiten
in .
Insbesondere geht aus Gl. (3.30) hervor, dass die Phase des Gaußstrahls auf der optischen
Achse für große Abstände zum Fokus (z>>λ) gegenüber der Phase einer ebenen Welle in
z-Richtung um π/2 verschoben ist, was als Gouy-Phasenverschiebung [43, 44] bekannt
ist. Des Weiteren ist der Betrag der axialen Phasensteigung in der Nähe des Fokus
<¸1 , ,3
Y b kleiner, als der einer ebenen Welle in z-Richtung. Mit der Näherung
<
<¸1 , ,3
1/ folgt Ü < Ü Ý b. Eine ausführliche Diskussion der axialen Phasensteigung eines
Fokus im Hinblick auf axiales Tracking mittels BFP Interferometrie findet sich in Ref.
[42].
32
4 Manipulation mit optischen Fallen
In diesem Kapitel zur optischen Manipulation [12, 13, 45-47] wird speziell ein
Schwerpunkt auf die Manipulation von Nanorods in optischen Fallen gesetzt, sowie ein
Überblick des wissenschaftlichen Status Quo gegeben. Weiterhin wird die anisotrope
Hydrodynamik eines Zylinders näher beleuchtet, welche relevant für dessen Verhalten in
einem viskosen Medium in einer optischen Falle ist. Nachdem der experimentelle Aufbau
geschildert wurde, welcher im Rahmen dieser Arbeit entstanden ist, wird auf eigens
durchgeführte Experimente eingegangen. Es werden neue Möglichkeiten der optischen
Manipulation aufzeigen, welche zum Aufbauen einer funktionellen Nanostruktur dienen
können.
4.1 Optische Manipulation von Nanorods
Nanorods (NR) sind stäbchenförmige Partikel mit Durchmessern kleiner gleich 100nm
(die Definition wird nicht immer streng verwendet). Solche mit hohen
Aspektverhältnissen werden typischerweise als Nanodrähte (nanowires, NW) bezeichnet.
Nanorods, Nanodrähte, sowie auch Nanoröhrchen (nanotubes, NT) stellen gegenüber
Beads eine neue Klasse von Objekten dar, welche mit optischen Fallen manipuliert
werden können. Deren Nutzen liegt in Anwendungen unterschiedlicher Art und in
diversen Feldern, wie biologischen Studien [48], Mikroelektronik [49] oder Photonik [5052].
Beispielsweise hat die Rotation von Nickel Nanorods, welche an biomolekulare Motoren
befestigt wurden zum Verständnis dieser wichtigen biomechanischen Systeme
beigetragen [53]. Die Nickel-Nanorods, die zum Beobachten der Drehbewegung der
Molekularmotoren verwendet wurden, waren 0.75-1.4µm lang und 150nm im
Durchmesser. Ein optischer Drehmoment könnte, wie Bonin [54] vorschlug, dazu
verwendet werden die molekularen Motoren unter verschiedenen Bedingungen (ATP
Konzentrationen und externe Drehmomente) zu studieren.
Manipulationstechniken
Neben der Manipulation mit optischen Pinzetten gibt es verschiedene andere Techniken
Nanopartikel für unterschiedliche Anwendungen zu integrieren oder anzuordnen, wie
etwa die Langmuir-Blodgett Technik [55] oder die Dielektrophorese. Insbesondere
eignen sich optoelektrische Pinzetten (OET), welche auf dynamischen, durch Licht
aktivierte, virtuellen Elektroden basieren. Jamshidi et al. [56, 57] konnten mit OET eine
auf 2D beschränkte Gitteranordnung von halbleitenden (Si) und metallischen (Ag)
Nanodrähten aufbauen.
Manipulation von zylindrischen Partikeln mit optischen Fallen
Das Thema der Manipulation von NR, NW und NT mit optischen Fallen ist aktuell, was
sich durch die Anzahl neuerlicher Studien und beteiligter Gruppen zeigt. Dabei sind die
Materialien und Strukturen der gefangenen Objekte vielfältig. So wurden optische Fallen
Experimente mit dielektrischen oder doppelbrechenden Nanorods [58-62], Carbon-NT
[63-67], halbleitenden NR und NW [68-73], plasmonischen NR [74-77] oder
stäbchenförmigen biologischen Proben, wie Bakterien [78], durchgeführt.
33
4 Manipulation mit optischen Fallen
Photonische/biologische Anwendung
Pauzauskie et al. [70] konnten unterschiedliche halbleitende Nanodrähte mit hohen
Aspektverhältnissen und Durchmessern in Subwellenlänge mit einer optischen Falle
(λ0=1064nm) in Wasser fangen. In einem Kammersystem konnten NW, die auf das untere
Deckgläschen abgesunken waren zu einer Anordnung an einem oberen mit Lysin
beschichteten Deckgläschen zusammengesetzt und verschweißt werden. Die
mechanischen Kontakte wurden mit SEM bestätigt. Es wurde eine 3D Struktur aus
waagrecht liegenden GaN und SnO2 NWs aufgebaut. Erstere haben prinzipiell die
Eigenschaft, dass sie als UV Nanolaser und letztere als Lichtleiter fungieren können. Die
Präzision bei der Positionierung (10-60nm) war durch Brownsche Bewegung bestimmt.
Im Hinblick darauf, dass ein NW als Laserquelle zur lokalen Fluoreszenzanregung und
damit für hochauflösende Bildgebung in den Lebenswissenschaften genutzt werden
könne (siehe auch Ref. [71]), wurde ein GaN NW über eine HeLa Zelle gescannt.
Weiterhin konnte ein Ende des NW auf der Zellmembran abgesetzt und stabil in der
Position gehalten werden.
Elektronische Anwendungen
Eine einfache elektronische Anwendung kann sein, dass man etwa Nanodrähte dazu
benutzt eine Verbindung zweier Elektroden herzustellen. Wilson et al. [79] zeigten für
stark absorbierende Nanodrähte, wie mit einer schwachen optischen Falle mit NA=0.22
und in Kombination mit Konvektionskräften stabile Kontakte hergestellt werden können.
Lee et al. [49] konnten einen In2O3 NW stabil auf zwei Elektroden platzieren und durch
eine hohe Laserleistung fixieren. In2O3 NW können als halbleitende, transparente und
flexible Bauteile in elektronischen Schaltungen verwendet werden. Die NWs wurden
vertikal in einer Punktfalle und horizontal in einer Linienfalle gefangen. Jedoch konnten
die NWs nur in einer Linienfalle gefangen werden, wenn eine begrenzende Wand den
Strahlungsdruck kompensierte, welche ein oberes Deckgläschen in einer Probenkammer
war. Die Länge der Linienfalle wurde der Länge des gefangenen NW angepasst. Es
wurden Scanfrequenzen von 14-34Hz verwendet.
Weitere Anwendungen
Neves et al. [80] bestimmten Rotationsfrequenzen von PMMA Nanofasern (11.4 x
0.57µm, L/D=20). Solche könnten als aktives Element in der Mikrofluidik oder als lokale
Sonde in der Mikrorheologie oder für ein photonisches Kraftmikroskop (PFM) verwendet
werden. Das Abbilden einer Oberfläche durch Abrastern mit einer holographisch
gefangenen zigarrenförmigen Sonde zeigten Phillips et al. [81].
Di Leonardo et al. [62] untersuchten die hydrodynamische Kopplung zweier paralleler
frei diffundierender Glas Mikrorods (10±0.08µm x 0.3µm), welche mit holographischen
optischen Fallen angeordnet wurden. Die optischen Fallen wurden mit Chopper
unterbrochen. Die Brownsche Bewegung wurde mit Videotracking (300f/s)
aufgezeichnet. Die Abstände der Nanorods wurden variiert. Eine Kopplung von Rotation
und Translation wurde vernachlässigt, da die mittlere quadratische Winkelauslenkung für
die kurzen betrachteten Zeitskalen vernachlässigbar war.
Hydrodynamische Kopplung hängt vom Abstand, der Orientierung und der Form der
beteiligten Objekte ab und ist daher ein sehr kompliziertes Problem. Nanoröhrchen,
Nanodrähte oder in der Biologie Flagella und Mikrotubuli haben eine quasi 1d Struktur
und sind daher sehr ähnlich in deren hydrodynamischen Verhalten. Es wurde ein
Übergang von einem 3d- zu einem 2d-artigen logarithmischen Verhalten gefunden, wenn
34
der Abstand kleiner als die Länge des Nanorods war. Experimentelle Daten stimmten sehr
gut mit Finite Elemente Analyse (FEA) überein, eine analytische Beschreibung wurde
angegeben. Durch eine 5D Trackingmethode könnte zusätzlich die Kopplung von
Rotation und Translation betrachtet werden.
Spezielles Medium
Stabiles optisches Fangen und Manipulieren von Partikeln mit hohem Brechungsindex in
Medien mit kleinem Brechungsindex wird oft durch die Streukraft vereitelt, welche über
die Gradientenkraft dominiert. Ein geeignetes Medium kann die optische Manipulation
dennoch ermöglichen. Dies konnten Engström et al. [82] für GaN Nanodrähte zeigen,
indem sie ein Medium aus Flüssigkristallen verwendeten.
4.1.1
Anisotrope Hydrodynamik eines Zylinders
Die Symmetrie eines Zylinders ist gegenüber der einer Kugel reduziert. Infolgedessen ist
'
die Hydrodynamik richtungsabhängig. Für einen Zylinder ist der Reibungskoeffizient Þ
der Translation ein Tensor. In Ref [83] von Tirado et al. finden sich Formeln für die
Reibungskoeffizienten ß und ∥ der Translation für die Richtungen senkrecht und
parallel zur Zylinderachse, sowie der Reibungskoeffizient für eine Rotation
senkrecht zur Zylinderachse um den Schwerpunkt des Zylinders. Diese lauten
4jáâ
]Û/+`
â
ã ³ µ ºß
2jáâ
∥ ]Û/+`
ã1â/3 º∥
jáâJ
]Û+`
31ã1â/3 º 3
ß (4.1)
(4.2)
(4.3)
für einen Zylinder mit Länge â und Durchmesser , Viskosität á des Mediums und
Korrekturtermen gemäß [84, 85] für Zylinder mit Aspektverhältnis â/ > 4.6
ºß 0.866 0.15è 8.1è % 18è J 9è U
º∥ 0.114 0.15è 13.5è % 37è J 22è U
º 0.446 0.2è 16è % 63è J 62è U
(4.4)
wobei è 1/ã12â/3. Eine Rotation um die Zylinderachse wird in dieser Arbeit nicht
betrachtet.
Liegt eine Rotation nicht um den Schwerpunkt, aber um einen versetzten Drehpunkt mit
Versatz ë vor, so muss in Gl. (4.3) die Länge des Zylinders L mit â 2ë ersetzt werden,
vgl. [80].
Translatorische Reibungskoeffizienten in Richtungen, die nicht senkrecht oder parallel
zur Zylinderachse sind, bleiben unbekannt. In solchen Fällen bietet sich eine
'
Beschreibung im Bezugssystem des Zylinders an [86]. So hat der Reibungstensor Þ
Diagonalform, mit den Einträgen AA %% ß und JJ ∥ .
In Abb. 4.1 sind die Reibungskoeffizienten als Funktion der Länge für unterschiedliche
Durchmesser im Größenbereich der in dieser Arbeit verwendeten Nanorods dargestellt.
35
4 Manipulation mit optischen Fallen
Bezüglich der Translationen verhalten sich die Reibungskoeffizienten in guter Näherung
linear mit der Länge des Zylinders. Interessanterweise geht in den Reibungskoeffizient ∥
für eine Translation parallel zur Zylinderachse maßgeblich dessen Länge ein. Es kommt
nicht nur auf dessen Angriffsfläche, sondern auch auf die Strömung entlang des Zylinders
an. Des Weiteren haben die Reibungskoeffizienten ß und ∥ etwa gleich große Werte,
trotz des großen Aspektverhältnisses â/ > 4.6, z. B. ist ß /∥ = 1.4 für einen
Zylinder mit L = 2 µm und a = 20. Für die Rotation ist der Zusammenhang von
Zylinderlänge und Reibungskoeffizient deutlich nicht-linear.
Abb. 4.1 Reibungskoeffizienten ß und ∥ senkrecht und parallel zur Zylinderachse vs.
Zylinderlänge L, Parameter Zylinderdurchmesser D, in Wasser bei Raumtemperatur
T=25°.
Neben den Gleichungen (4.1)-(4.4) aus Ref. [83] sind weitere Ansätze zur Bestimmung
von Reibungskoeffizienten aus der Literatur bekannt. Zum Vergleich seien die etwas
abweichenden Werte für einen Zylinder mit L=5µm und D=0.2 µm angegeben, die
Simpson et al. [20] mit der „rough shell“ Methode nach Carrasco und Garcia de la Torre
[87] bestimmten. ß =1.83⋅10-8 Ns/m, ∥ =1.28⋅10-8 Ns/m, =6.29⋅10-20 Nsm. Der
Zylinder wurde durch ein Agglomerat von in der Größenordnung 104 kleinen Kugeln
modelliert. Pauzauskie et al. [70] berechneten einen translatorischen Reibungskoeffizient
6ájPí , wobei á die Viskosität des Mediums Wasser und Pí ein effektiver
hydrodynamischer Radius des Nanorods war. Zum einen wurde eine analytische Formel
von Perrin [88], zum anderen eine Monte Carlo Simulationsmethode nach Hansen [89]
verwand. Für einen Zylinder mit L=20µm und D=0.1µm wurde ein Pí von 2.1µm bzw.
1.9µm erhalten.
Um eine quantitative Vorstellung für die Dynamik von Translation und Rotation eines
Nanorods zu bekommen, kann man die mittlere quadratische Auslenkung (engl. mean
square displacement, MSD) in m² bzw. die mittlere quadratische Winkelauslenkung
(engl. rotational mean square displacement, RMSD) in rad² berechnen.
Die Formeln lauten für freie Diffusion
b [
6
b [
P~ 2
6
~ 2
(4.5)
(4.6)
mit Index f î, ∥ für Translation senkrecht und parallel zur Zylinderachse und Index K6
für Rotation senkrecht zur Zylinderachse um den Schwerpunkt.
Beim Tracking stellt sich die Frage, wie hoch zeitlich abgetastet werden muss, um eine
hohe spatiale Auflösung zu erhalten oder wie lange es dauert bis ein Objekt um eine
36
bestimmte Strecke ausgelenkt ist. In Abb. 4.2 finden sich hierzu Erwartungswerte. Der
zeitliche Erwartungswert für eine Auslenkung senkrecht zur Zylinderachse um c =10nm
für ein frei diffundierendes Nanorod mit L=3µm und D=0.1µm in Wasser bei
Raumtemperatur ist <t> = 100µs. Im Vergleich ist <t> = 37µs für ein Bead mit gleichem
Volumen. Eine Winkelauslenkung senkrecht zur Zylinderachse um · =1° um den
Schwerpunkt dauert <t> = 0.35ms.
Abb. 4.2 Erwartungswerte der mittleren Auslenkung bzw. Winkelauslenkung für einen frei
diffundierenden Zylinder in Wasser bei Raumtemperatur T=25° vs. Zeit. a) Auslenkung
senkrecht und parallel zur Zylinderachse. b) Winkelauslenkung für Rotation senkrecht zur
Zylinderachse um den Schwerpunkt, Parameter Länge L.
4.1.2
Verhalten von zylindrischen Partikeln in einer optischen Falle
Bereits 1987 untersuchten Ashkin et al. einen zylindrischen Tabakmosaikvirus
(L=0.32µm, D=20nm) in einer optischen Falle. Es wurde von einer Ausrichtung entlang
der Polarisationsrichtung berichtet. Gauthier et al. [90, 91] betrachteten optische Kräfte
und Drehmomente auf zylindrische Partikel in optischen Fallen mit Ausdehnungen
Größer als der Wellenlänge. Erst in den letzten Jahren wurden diesbezügliche Studien
veröffentlicht, welche Nanorods mit Durchmessern kleiner der Wellenlänge betrachteten.
Die Frage, ob ein zylindrisches Partikel mit einer optischen Falle gefangen werden kann
ist ungleich viel schwieriger zu beantworten, als die für ein Bead. Daneben stellt sich die
Frage in welcher Orientierung ein asphärisches Nanopartikel gefangen wird. Die
Formanisotropie macht das Problem komplexer. Es kommt ein entscheidender Parameter,
das Aspektverhältnis a=L/D hinzu. Eine Kategorisierung in Nanodrähte (a>>1), Nanorods
mit (a>1) und Scheiben (a≤1) ist aufgrund deren unterschiedlicher Verhalten in optischen
Fallen sinnvoll. Daneben nehmen noch eine Anzahl weiterer Parameter bzw.
Versuchsbedingungen Einfluss, wie etwa Größe, Brechungsindex, Absorption,
Resonanzen, NA, Wellenlänge oder Art der Polarisation (linear, zirkular, radial) des
Lasers. Im Übrigen ist die Querschnittsfläche eines Nanorods oder Nanodrahtes nicht
immer rund, sondern kann auch eine andere Form haben [70].
In den neuerlich veröffentlichten Studien von Rockstuhl et al. [92], Pauzauskie et al. [70],
Reece et al. [30], Borghese et al. [93], Bonin et al. [54], Ling et al. [94], Simpson et al.
[20], Li et al. [95], Bareil et al. [39] und Cao et al. [96] wurde das Verhalten, optische
Kräfte und Drehmomente von im weiteren Sinne zylindrischen Partikeln in einer
optischen Falle adressiert und insbesondere deren Fangpositionen relativ zum
Fokuszentrum und deren Orientierungen zur optischen Achse untersucht.
37
4 Manipulation mit optischen Fallen
Das Verhalten von Nanorods oder formverwandter Partikel speziell in holographischen
Fallen wurde von Simpson et al. [97-99] und Phillips et al. [100] untersucht.
4.2 Experimenteller Aufbau
Im Rahmen dieser und einer verwandten Doktorarbeit von B. Landenberger wurde ein
neues Setup zur optischen Manipulation aufgebaut. Es zeichnet sich insbesondere darin
aus, dass verschiedene Strahlengänge für unterschiedliche Anwendungen benutzt werden
können. Ein „kurzer“ ohne und ein Strahlengang mit spatialem Lichtmodulator (SLM).
Neuerlich kam noch ein weiterer dritter Strahlengang mit einem akusto-optischem
Modulator (AOD) hinzu.
Der Aufbau basiert auf einem invertiertem Lichtmikroskop in das via Scanspiegel ein
NIR Laser mit Wellenlänge =1064nm eingekoppelt wird, siehe Abb. 4.3. Der
Laserstrahl wird durch eine Objektivlinse des Mikroskops fokussiert. Der Laserfokus
bildet die optische Falle, mit der Partikel gefangen werden können. Durch Bewegen der
Scanspiegel kann die optische Falle lateral in der Fokusebene versetzt werden. Zum
Tracking mittels BFP Interferometrie (siehe Abschnitt 2.3) kann auf das
Mikroskopgehäuse eine Detektionseinheit aufgesetzt werden.
a)
b)
Abb. 4.3 Fotos des experimentellen Aufbaus. a) Gesamtübersicht des Aufbaus auf einem
optischen Tisch. Die wesentlichen Bestandteile sind ein Laser, dessen Strahl via
Scanspiegel (SM) in ein invertiertes Lichtmikroskop (Zeiss Axiovert 200 Mat) eingekoppelt
wird und eine selbst-konstruierte Detektionseinheit (DetUnit) zum Tracken, welche auf das
Mikroskop aufgesetzt werden kann. b) Seitenansicht der Detektionseinheit. Von unten
nach oben sieht man den Objektivrevolver OR mit einer Objektivlinse (OL) und die
Nanostage (ns) zum Verfahren einer Probe, welche innerhalb der ns gehaltert ist. Die
Detektionseinheit liegt auf einer kinematischen Halterung (kH) auf dem Mikroskopgehäuse
auf. Es sind die folgende Komponenten der Detektionseinheit zu erkennen: die
Detektionslinse (DL), die von unten das Laserlicht einfängt und die Beleuchtung von oben
durchlässt, ein dichroitischer Spiegel (DC), Linsen (L1-L4) von 4f-Systemen und die
Quadrantenphotodioden (QPD1 und QPD2), sowie eine Kamera (µeyeCam).
Abb. 4.4 zeigt schematisch den detaillierten experimentellen Aufbau. Eine Liste der
verwendeten Bauteile findet sich im Anhang, siehe 8.2. Der optische Aufbau befindet
sich auf einem schwingungsgedämpften optischen Tisch. Im Folgenden wird auf die
einzelnen Komponenten und zuletzt kurz auf die verwendete Software eingegangen.
38
4.2.1
Lasereinheit und Optische Pinzette
Der Laser (diodengepumpter Nd:YAG Laser, cw, λ=1064nm, 8 W, mit Feedback via
Leistungsverstärker) wird luftgekühlt und steht unterhalb des optischen Tisches, so dass
keine mechanischen Schwingungen des Ventilators auf das Setup übertragen werden. Der
Laserstrahl wird in einer optischen Faser zum Laserkopf auf den optischen Tisch geführt.
Innerhalb des Laserkopfes befindet sich eine optische Diode, die eine Rückstrahlung,
etwa durch Reflexion an einem späteren Bauteil, in den Laser verhindert. Eine
Kombination aus λ/2-Plättchen (λ/21) und polarisierendem Strahlteilerwürfel (PBS1)
dient dazu ungewünschte Strahlanteile auszufiltern. Diese werden in eine Strahlfalle
(engl. beam trap, BT1) abgelenkt. Der transmittierte Strahl ist parallel zur Tischplatte
polarisiert. Ein dielektrisch beschichteter Spiegel (dM1) transmittiert einerseits einen
kleinen Anteil (<0.2%), dieser wird von einem Absorber Filter (engl. attenuator, Att)
abgeschwächt und auf eine Referenzdiode geführt, die zur Leistungsmessung dient und
Teil des Feedbacks (siehe Abschnitt 4.2.3) ist. Andererseits lenkt der dielektrische
Spiegel (dM1) den Strahl um 90° um und dient zur Strahljustage. Eine weitere
Kombination von λ/2-Plättchen (λ/22) und polarisierendem Strahlteilerwürfel (PBS2)
kann zur Leistungsregulation verwendet werden. Der transmittierte Strahl geht in den
AOD Strahlengang bzw. wird von einer Strahlfalle (BT2) vernichtet. Der reflektierte
Strahl passiert einen variablen Strahlaufweiter (BE 2..8x). Mit diesem kann zum einen die
gewünschte Strahlaufweitung mit einem Vergrößerungsverhältnis von 2 bis 8 und zum
anderen die Kollimation des Strahls eingestellt werden. Ein weiteres λ/2-Plättchen (λ/23)
kann für eine Drehung der Polarisationsrichtung verwendet werden. Die dielektrisch
beschichteten Klappspiegel (dM2) und (dM3) können präzise in 0° und 45° Stellung
geklappt werden. In offener Stellung geht der Strahl in den SLM Strahlengang, welcher
hier nicht weiter beschrieben wird, da er in dieser Arbeit nicht verwendet wurde. In
geschlossener Stellung wird der Strahl zwei Mal reflektiert und geht den „kurzen“
Strahlengang. Ein rechtwinkliges, goldbeschichtetes Prisma (AuM) lenkt den Strahl
vertikal nach oben in den Rearport Anbau des hinteren Mikroskopeingangs (engl.
rearport). Der Strahl passiert zunächst eine Lochblende (engl. pinhole), die etwa in einer
konjugierten Ebene zur hinteren Brennebene der Objektivlinse steht. Die Lochblende
schneidet je nach Strahldurchmesser einen Teil des Strahls ab und dient zum Schutz des
Objektivs. Die Leistung des Strahlanteils, der die BFP überausleuchtet, wird somit nicht
in das Objektiv eingetragen. Die motorisierten Scanspiegel bestehen aus einem X- und
einem Y-Scanspiegel, s. Abb. 4.5 und können per Software (siehe Abschnitt 4.2.7) vom
PC aus angesteuert werden. Die Scanspiegel liegen etwa in einer konjugierten Ebene zur
hinteren Brennebene der Objektivlinse (OL). Durch Verkippen der Scanspiegel kann der
Laserfokus lateral in der Fokusebene versetzt werden. Eine spezielle Scanlinse (SL),
welche für schrägen Lichteinfall ausgelegt ist und eine Tubuslinse (TLrear) bilden ein 4-f
System, siehe Abb. 4.5. Der Laserstrahl wird zwischen der Scanlinse (SL) und der
Tubuslinse (TLrear) von einem dichroitischen Spiegel (DC1) um 90° umgelenkt. Ein
dichroitischer Spiegel (DC2) in dem motorisierten Reflektorrevolver des Mikroskops
reflektiert den Laserstrahl vertikal nach oben direkt in die Objektivlinse (OL). Zwei
Objektive mit unterschiedlicher Vergrößerung standen zur Verfügung. Diese wurden in
einen motorisierten Objektivrevolver geschraubt. Beide Objektive sind UV, VIS und NIR
korrigierte Wasserimmersions-Objektive mit einer numerischen Apertur von NA=1.2 und
einem Vergrößerungsverhältnis von M=40 bzw. M=63 (bzgl. der Tubuslinse (TLcam) vor
der Kamera). Meist und wenn nicht explizit anders erwähnt wurde das OL63x Objektiv
verwendet. Ein Wasserimmersions-Objektiv verursacht a priori keine sphärischen
Aberrationen,
im
Gegensatz
zu
einem
Ölimmersionsobjektiv
wegen
39
4 Manipulation mit optischen Fallen
Brechungsindexdiskrepanz zum Probenmedium. Sphärische Aberrationen führen zu
einem aufgeweiteten Fokus und schwächen daher die Fallenstärke [23]. Hingegen können
mit einem Ölimmersionsobjektiv höhere Maximalwinkel im Wasser erhalten werden,
etwa 77.8° für NA=1.3 mit nÖl=1.52, statt 64.5° für NA=1.2 und Wasserimmersion. Die
Fallensteifigkeit kann deutlich gesteigert werden für NA>1.2, vgl. [39]. Die maximal
sinnvolle NA ist wegen Totalreflexion auf 1.33 limitiert. Die Optik des verwendeten
Objektivs ist korrigiert für die Verwendung eines Deckgläschens. Ein Einstellring am
Objektiv für die Dicke des Deckgläschens ist vorgesehen.
Der Laserstrahl wird von dem Objektiv (OL63x) in die Probenkammer fokussiert und
kann als optische Pinzette dienen.
40
Hellfeld
Beleuchtung
M7
L5 Diff
Detektionseinheit
M6
QPD2
L4
Att4
AC40
L3
BT3
L2
BS1
AC25
DC3
λ/24
Probe
HXP120
PBS3 AC80
Att3
CCD2
AC20
Att2
QPD1
DL
Fluoreszenz
Beleuchtung
BS2
Nanostage
Filter
Rad
DC1
TLrear
OL63x
Mikroskop
DC2
Filterschieber1
SLM
TLcam
SL
M5
BE2 2..8x
SM
CCD1
AuM
Filterschieber2
pinhole
Rearport-Anbau
dM3
dM2
L7
λ/23
M7
BE1 2..8x
RD
s - polarisiert
Att
λ/22
dM1
(… AOD)
PBS2
PBS1
BT2
BT1
horizontaler Strahl
λ/21
Laser
Kopf
p - polarisiert
Laser
vertikaler Strahl
Abb. 4.4 Experimenteller optischer Aufbau mit NIR-Strahlengang des Laser mit
Wellenlänge λ0=1064 nm. Eine Liste der verwendeten Bauteile findet sich im Anhang,
siehe 8.2.
41
4 Manipulation mit optischen Fallen
4.2.2
Scanspiegel
Die Scanspiegel (SM, siehe Abb. 4.4) sind eine wesentliche Setupkomponente zur
optischen Manipulation. Mit den Scanspiegeln können manuell oder automatisiert
beliebige Trajektorien des Fokus in der Fokalebene erzeugt werden. Zum einen kann der
Fokus per Mausklick im Fenster des übertragenen Mikroskopkamerabildes geführt
werden, zum anderen können per Skript parametrisierte Trajektorien vorgegeben werden.
Insbesondere wurden die Scanspiegel zum Erzeugen einer Linienfalle verwendet. Die
Länge, die Position und der Winkel, sowie die Frequenz der Linienfalle, die Laserleistung
und ein Intensitätsprofil können eingestellt werden. Dafür wird ein Datensatz mit
Positionen, welche angefahren werden und dazugehörige Laserleistungen, übergeben. Die
Fokustrajektorie entlang einer Linie ist dabei in eine gewisse Anzahl Punkte diskretisiert.
Die Eigenschaften einer typischen Linienfalle sind in Tabelle 5.2, Seite 97 aufgeführt.
Im Übrigen können die Positionssignale der Scanspiegel ausgelesen werden. Hier gilt zu
beachten, dass die Signale aufgrund unterschiedlicher Signalwege i.A. nicht exakt mit
den QPD Signalen synchronisiert sind.
Als Scanspiegel (siehe Abb. 4.5a) wurden zwecks geringer Trägheit solche mit besonders
kleiner Apertur (für 4mm Strahldurchmesser) gewählt, so dass die optische Falle
möglichst schnell verfahren werden kann. Die motorisierten Scanspiegel werden über
eine digitale Ansteuerung (servo driver) betrieben, welche von einem externen Netzteil
versorgt wird.
Abb. 4.5 X- und Y-Scanspiegel zum Auslenken der optischen Falle in der Fokalebene. a)
Der Abstand d der Auftreffpunkte des Laserstrahls auf die Spiegel ist eingezeichnet. b)
Schemazeichnung von 6f-System mit Fokusversatz dx in der Fokalebene FP. Eine
Strahlverkippung durch die Scanspiegel SM in der konjugierten hinteren Brennebene BFP*
um den Winkel α führt zu einem Fokusversatz dx* in der konjugierten Fokalebene FP*.
Dieser Versatz wird mit der Vergrößerung 1/Mrear=1/53 des 4f-Systems aus Tubuslinse
TLrear und Objektivlinse OL63x in die Fokalebene übertragen. Im Rearport wurde nicht
die Standardtubuslinse von Zeiss verwendet.
Ein Fokusversatz I_ in der Fokalebene durch einen Auslenkwinkel ( der Scanspiegel,
(siehe Abb. 4.5b), berechnet sich mit Sinusbedingung aus der Brennweite ^ïð der
Scanlinse SL und der Vergrößerung 0 des 4f-Systems aus Tubuslinse TLrear im
Rearport und Objektivlinse OL63x gemäß
42
I_ ^ïð f1(3/0
(4.7)
Mit der verwendeten Optik wurde ein starker Hebel erreicht. Das Verkippen eines
Spiegels um 1µrad entspricht bereits einem Fokusversatz von etwa 1µm.
Beim Tracking mittels BFP-Interferometrie gilt zu berücksichtigen, dass eine konjugierte
hintere Brennebene der Objektivlinse zwischen den Scanspiegeln (siehe Abb. 4.5a) liegt.
Demzufolge wirkt sich ein Verkippen der Spiegel in einer Kombination aus
Strahlverkippung und Versatz in der detektionsseitigen BFP aus. Somit kann ein lateraler
Versatz des Fokus zu einem lateralen Positionssignal führen. Dieses muss gegebenenfalls
als Blindsignal abgezogen werden.
Abb. 4.6 Spektrale Leistungsdichte (PSD) von QPD Signalen für ein Bead in optischer
Falle. a) Die PSD des QPD1y Signals weist eine Störung auf. b) PSDs des QPD1y Signals
bei aus- und angeschalteter Ansteuerung der Scanspiegel (SM).
Frequenzanalysen von QPD Signalen eines gefangenen Beads (Polystyrol, Durchmesser
0.5µm) in einer optischen Falle ergaben, dass die Kurven der spektralen Leistungsdichte
für das QPD1x und vor allem für das QPD1y Signal von der zu erwartenden Form einer
Lorentz Kurve abwichen, siehe Abschnitt 2.4.2. Insbesondere zeigt die spektrale
Leistungsdichte des QPD1y Signals eine ausgeprägte Störung bei 6-8kHz, siehe Abb.
4.6a.
Die Ursache ist wahrscheinlich ein Vibrieren der Scanspiegel mit deren mechanischen
Resonanzfrequenzen. Diese störenden Vibrationen (engl. dither) liegen nicht vor, wenn
die Ansteuerung der Spiegel ausgeschalten ist, siehe Abb. 4.6b.
4.2.3
Feedback
Beim Tracking mittels BFP Interferometrie und insbesondere zum Aufzeichnen des Sz
Signals ist eine stabile Laserleistung wichtig. Die Laserleistung wurde über eine
Feedback Schleife stabilisiert, siehe Abb. 4.7. Dabei detektiert die Referenzdiode (RD)
den Laserstrahl und gibt ein Signal aus, das proportional zur Leistung ist. Das Ist-Signal
wird in einen PID Regler (NoiseEater) mit dem Soll-Signal verglichen. Bei einer
Abweichung von Ist- und Sollsignal wird eine proportionale Spannung ausgegeben. Diese
43
4 Manipulation mit optischen Fallen
wird über einen Spannungsteiler in den Laser Treiber weitergegeben. Das Feedback
Signal bewirkt eine Reduzierung des Laserdiodenstroms und damit eine geringere
Laserleistung.
Die Regelung ist negativ, d. h. es muss eine maximale Laserleistung eingestellt werden
und erst die Regelung reduziert die Leistung auf den gewünschten geringeren Wert.
Dieser Wert muss jedoch überhalb eines gewissen Schwellwerts liegen, so dass die
Regelung, welche über einen Leistungsverstärker funktioniert, überhaupt arbeitet. Die
minimale Ausgabeleistung des Lasers aus dem Laserkopf ist etwa 500mW.
Laser
Laserkopf
RD
NoiseEater
Laser Treiber
Rückseite
P I D
in (0..1 V)
in
set
out (0..5 V)
Feedback
Spannungsteiler
Abb. 4.7 Feedback Schleife zur Laserstabilisierung.
4.2.4
Mikroskop und Spektrometer
Das Mikroskop mit Hellfeld- oder Fluoreszenz-Beleuchtung (siehe Abb. 4.4) kann
sowohl mit als auch ohne Detektionseinheit betrieben werden. Ein Mikroskopbild wird
mit einer Kamera am Seitenausgang (engl. side port) des Mikroskops aufgenommen. Die
Fokusebene wird über ein 4f-System aus Objektivlinse (OL) und Tubuslinse (TLcam) auf
den Kamerasensor (CCD1) abgebildet. Alternativ kann das Mikroskopbild mit bloßem
Auge durch ein Okular betrachtet werden.
Als Hellfeld-Lichtquelle wurde entweder eine Halogenlampe mit Optik (HAL100) oder
eine grüne LED verwendet. Zusätzlich kann über den Rearport eine
Fluoreszenzbeleuchtung eingekoppelt werden. Hierzu steht eine fasergekoppelte
Quecksilberdampflampe (HXP120) und ein motorisiertes Filterrad mit unterschiedlichen
Filtern zur Verfügung. Der Beleuchtungsstrahl kann den dichroitischen Spiegel (DC1) im
Rearport in Transmission passieren.
Unterhalb des Reflektorrevolvers und nochmals direkt vor der Kamera gibt es je einen
Filterschieber mit unterschiedlichen optischen Filtern.
Optional und alternativ kann in den Vorder-Ein-/Ausgang (engl. front port) eine Optik für
ein fasergekoppeltes Spektrometer eingesetzt und betrieben werden. Ein motorisierter
Klappspiegel im Mikroskopgehäuse wird entsprechend orientiert.
4.2.5
Detektionseinheit
Für das BFP Interferometrie Tracking wird eine spezielle Detektionseinheit benötigt.
Diese ist kompakt auf einem kleinen Breadboard montiert (siehe Abb. 4.3) und kann in
44
eine kinematische Halterung (siehe Abb. 4.8) auf das Mikroskopgehäuse aufgesetzt
werden. Die Detektionslinse muss sehr präzise zentral, axial und ohne Verkippung
gegenüber der Objektivlinse justiert sein. Die Justagemöglichkeit ist in Abb. 4.8
veranschaulicht.
3
1
2
K
DetUnit
Abb. 4.8 Kinematische Halterung und Justiereinheit der Detektionseinheit. Drei nach unten
herausstehende Kugelkopffeingewindeschrauben (K) werden in die drei Stationen (1, 2, 3)
der kinematischen Halterung aufgesetzt. 2 und 3 können jeweils in eine Richtung
verfahren werden, somit lässt sich die Detektionseinheit lateral positionieren. Die
Schrauben K dienen zur Justage von Höhe und Winkel der Detektionseinheit.
Wie in Abb. 4.4 gezeigt, passiert das Licht aus dem Probenvolumen die Detektionslinse
(DL). Ein dichroitischer Spiegel (DC3) reflektiert den Laserstrahl in die horizontale
Ebene der Detektionseinheit. Eine Kombination aus λ/2-Plättchen (λ/24) und
polarisierendem Strahlteilerwürfel (PBS3) kann zur Leistungsregulation verwendet
werden und dient zur Filterung der Polarisation. Der reflektierte s-polarisierte Strahl wird
in eine Strahlfalle abgelenkt. Der transmittierte p-polarisierte Strahl passiert einen
Achromaten (AC80) und wird von zwei Strahlteilerwürfeln (BS1 u. BS2) in insgesamt
drei Teilstrahlen aufgeteilt. Am Ende der Strahlengänge stehen die Detektoren QPD1,
QPD2 und eine Kamera (CCD2). Die Detektoren befinden sich jeweils in einer zur
hinteren Brennebene (BFPDL) der Detektionslinse konjugierten Ebene eines 4f-Systems
mit den Achromaten (AC20, AC25, AC40). Die hohe Strahlintensität wird mit Absorbern
vor jedem Detektor auf entsprechendes Niveau abgeschwächt. Die BFPDL wird passgenau
mit entsprechender Vergrößerung auf die QPD1 abgebildet. Die QPD1 wird vornehmlich
für die Detektion der lateralen Positionssignale verwendet. Für das axiale Positionssignal
wird die QPD2 doppelt überstrahlt, siehe Abschnitt 2.3.
4.2.6
QPD-Signalwege
Die vier QPD Signale einer QPD werden vorverstärkt und anschließend in die drei
Positionssignale ~_, ~l und ~ umgewandelt. Die Stromversorgung einer Einheit aus
QPD und Vorverstärker, sowie die Umwandlung der Signale übernimmt ein dafür
konzipiertes Gerät (miniSupplyQuad, Fa. TEM). Auf ein Summensignal (~) kann ein
Offset gegeben werden, um das Signal zu Nullen. Dies ist vorteilhaft für optimale
Diskretisierung beim Digitalisieren, wenn der analoge Spannungsbereich auf eine Bittiefe
gemappt wird. Die Signale können über BNC Buchsen abgegriffen werden. Über eine
BNC Box werden die Signale an einen A/D-Wandler (NIDAQ) und schließlich digital zu
einem PC weitergeleitet.
Das Offset Signal, sowie das Summensignal können Tiefpass gefiltert werden. Der
eingebaute Tiefpass 1. Ordnung ist jedoch wenig effektiv. Ein Tiefpass höherer Ordnung
mit steil abfallendem Frequenzgang wäre notwendig, um effektiv Aliasing-Effekte hoher
Störfrequenzen zu unterdrücken. Insbesondere ist dabei darauf zu achten, dass die QPD
Signale synchronisiert sind. Es darf keine zeitliche Differenz der Signalwege geben. Hier
45
4 Manipulation mit optischen Fallen
wird angenommen, die gemessenen QPD Signale aller Kanäle sind gleichzeitig
entstanden.
4.2.7
MicPy
MicPy ist eine Software Umgebung mit der das Setup im Wesentlichen über einen PC
bedient werden kann. Sie wurde von Lars Friedrich, einem ehemaligen Doktoranden des
Lehrstuhls programmiert und wird fortwährend weiterentwickelt und aktualisiert. Der
Name „MicPy“ setzt sich aus den Wörtern Mikroskop und Python zusammen. Letzteres
ist der Name der Programmiersprache auf der die Software basiert. Somit konnten die
Scanspiegel, die Nanostage, die Kameras, die Quadrantenphotodioden, die
Referenzdiode, der Laser, sowie die Beleuchtung koordiniert angesteuert bzw. Signale
ausgelesen werden.
4.3 Experimente zur Manipulation von Nanorods
Eine wichtige Motivation der nachfolgend beschriebenen Experimente mit ZnO Nanorods
war die Vision eine funktionelle Struktur aufzubauen und insofern die Nanorods als
Bausteine zu verwenden, um ein größeres drei-dimensionales Gebilde zu erstellen. Die
dazu notwendigen Einzelschritte Fangen, Translatieren, Orientieren und Absetzten von
Nanorods konnten durchgeführt werden.
Abb. 4.9 Vision: Funktionelle Struktur aus Nanodrähten oder -Nanorods. Nanorods können
mit einer optischen Falle als Bausteine verwendet und zu einer funktionellen 3D Struktur
aufgebaut werden.
4.3.1
Manipulation von ZnO Nanorods mit Punkt- und Linienfalle
Es wurden ZnO Nanorods verwendet, welche uns freundlicherweise vom Lehrstuhl
Nanotechnologie von Prof. Zacharias am IMTEK zur Verfügung gestellt wurden. Der
Herstellungsprozess wird in Referenz [101] geschildert. Im Wesentlichen wurden die
Nanorods auf ein Substrat aufgewachsen. Die Länge der Nanorods kann durch
Prozessparameter eingestellt werden.
ZnO Nanorods auf kleinen Waferstückchen mit wenigen Millimetern Kantenlänge
wurden mit einem Tropfen deionisiertem Wasser in ein Eppendorfröhrchen gegeben,
siehe Abb. 4.10. Vermutlich ist eine Aufbewahrung in Aceton langfristiger, denn ZnO
Nanorods könnten in Wasser oxidieren. Nach wenigen Sekunden in einem Ultraschallbad
erhält man eine kolloidale Lösung. Die Stäbchen brechen durch die Ultraschallwellen
vom Substrat ab.
46
Abb. 4.10 ZnO Nanorods. Links: SEM Bild von ZnO Nanorods. Die Nanorods sind
ungerichtet auf einem Siliziumsubstrat aufgewachsen. Deren Durchmesser variieren,
D≈60-110nm. Rechts: Wenige Millimeter große Waferstückchen mit aufgewachsenen
Nanorods und Eppendorfröhrchen mit Probe in Wasser.
Die Nanorods sind in Durchmesser und Länge größenverteilt. In dem
Rasterelektronenmikroskop (SEM) Bild in Abb. 4.10 lassen sich unterschiedliche
Durchmesser D der Nanorods erkennen. Es war D≈60-110nm. Zudem zerbrechen die
Nanorods im Ultraschallbad in unterschiedliche Längen.
Die Probenlösung wurde in ein Kammersystem gegeben, bestehend aus zwei
Deckgläschen (22x22mm x 170±5µm und 18mm rund, Stärke 1), welche durch einen
Silikonring (~0.5mm hoch) voneinander getrennt waren. Dadurch wurde die Kammer gut
abgedichtet, was eine Evaporation und störende Strömungen unterdrückte.
Typischerweise richteten sich die ZnO Nanorods (L≈1.8µm) in den durchgeführten
Experimenten in der optischen Falle entlang der optischen Achse aus. Darin waren diese
stabil in 3D gefangen und konnten durch Verfahren des Fokus oder der Nanostage
translatiert werden. Als Beispiel ist in Abb. 4.11a dargestellt, wie ein Nanorod in einer
Punktfalle entlang einer definierten Trajektorie (Kreisbahn mit Radius r=5µm) mit einer
Translationsgeschwindigkeit von v=31µm/s geführt werden konnte. Des Weiteren konnte
ein ZnO Nanorod in der Fokusebene orientiert werden, wie in Abb. 4.11b gezeigt. Zum
Ausrichten eines Nanorods senkrecht zur optischen Achse kann eine Linienfalle
verwendet werden. Die Orientierung des Nanorods in der Fokalebene kann durch die
Scanrichtung der Linienfalle vorgegeben werden. Auch in der Linienfalle konnten die
Nanorods stabil in 3D gefangen werden.
Abb. 4.11 Manipulation eines ZnO Nanorods in Wasser mit einer optischen Falle. a)
Minimumsprojektion 13 aufeinander folgender Bilder eines Nanorods in einer Punktfalle,
welche eine Kreisbahn beschreibt. Bildrate 13f/s, Belichtungszeit 0.8ms. Scalebar 5µm. b)
Nanorod in Linienfalle. Die Scanrichtung der Linienfalle wurde von 0° (waagrecht im Bild)
auf 45° und 90° gedreht. Scalebar 2.5µm.
47
4 Manipulation mit optischen Fallen
Darüber hinaus war ein reversibles Umschalten der Orientierung des Nanorods parallel
und senkrecht zur optischen Achse möglich. Dies konnte durch Wechseln des Modus der
optischen Falle von Punktfalle zu Linienfalle bewirkt werden. Das Nanorod benötigte
eine Reaktionszeit von 6 Y 0.6s um jeweils die neue Gleichgewichtslage einzunehmen.
Die Periodendauer der Linienfalle bei einer Frequenz von f=100Hz war hingegen 10ms.
Abb. 4.12 zeigt Bilder eines Mikroskopvideos von einem Nanorod, welches von
paralleler zu senkrechter und zurück zu paralleler Ausrichtung (bzgl. optischer Achse in
z-Richtung) geschalten wurde. Der Vorgang der Umorientierung ist in einer
Schemaskizze verdeutlicht.
Abb. 4.12 Reversibles Umschalten eines Nanorods in die Ausrichtungen parallel und
senkrecht zur optischen Achse (entlang z-Richtung), Bilder eines Mikroskopvideos und
Schemaskizze. Vlnr: ZnO Nanorod in Punktfalle (Markierung) in Wasser ist entlang der
optischen Achse ausgerichtet. In einer scannenden Punktfalle (Linienfalle) richtet sich das
Nanorod innerhalb einer Dauer 6 Y 4∆6 horizontal und entlang der Scanrichtung der Falle
in der Fokalebene aus. Durch Anhalten der Punktfalle richtet sich das Nanorod wieder
entlang der optischen Achse aus. Zeitauflösung etwa ∆6 Y155ms, Belichtungszeit 0.8ms.
Scalebar 2.5µm.
Des Weiteren konnte ein ZnO Nanorod in wässriger NaCl Lösung auf einem
Deckgläschen abgesetzt werden, s. Abb. 4.13. Dazu wurde das Deckgläschen von unten
an das in der Fokusebene orientierte Nanorod in einer Linienfalle heran gefahren. Das
Nanorod blieb auf dem Deckgläschen kleben und konnte mit der Nanostage aus der
Linienfalle herausgefahren werden.
Abb. 4.13 Absetzen eines ZnO Nanorods in Linienfalle auf Deckgläschen (DG).
Bildabfolge eines Mikroskopvideos und Schemaskizze. a) Nanorod in Linienfalle
(Markierung) in wässriger NaCl Lösung überhalb von DG. b) DG mit fixem Nanorod (oben
rechts) wird hochgefahren. c) Nanorod in Linienfalle kontaktiert DG. d) Das abgesetzte
Nanorod klebt auf DG und kann mit der Nanostage aus der Linienfalle herausgefahren
werden. Scalebar 2.5µm.
48
Diskussion
Die Manipulation eines Nanorods mit einer Linienfalle im homogenen Medium und das
Umschalten der Orientierung des Nanorods parallel und senkrecht zur optischen Achse
sind neu. Dies gelang Lee et al. [49] nur mit beschränkender Wand in Vorwärtsrichtung
des Strahls. Jedoch kann die Länge des Nanorods darüber entscheiden, ob ein stabiles
Fangen möglich ist. Van der Horst et al. [72] berichteten davon, dass längere ZnO
Nanorods (L~6µm) nicht in einer Linienfalle gefangen werden konnten, wobei allerdings
Ethanol als Probenmedium verwendet wurde, was weniger Viskos als Wasser ist. Sie
konnten jedoch mit zwei Linienfallen aus entgegengesetzten Propagationsrichtungen
stabiles Fangen in 3D erzielen. Die erfolgreiche Manipulation von CdS Nanodrähten mit
holographischen optischen Fallen und insbesondere das Schneiden, Zusammenfügen und
Verschweißen wurden von Agarwal et al. [69] demonstriert. Hier wurde gezeigt, dass
ZnO Nanorods geeigneter Länge im homogenen Medium mit einer einfachen Linienfalle
in 3D positioniert werden können. Alternativ könnte die Multiplex Technik (auch time
sharing Methode) besonders zur Manipulation von Nanorods geeignet sein. Diese sieht
vor, dass der Fokus zwei oder mehrere ausgewählte Positionen anfährt, in diesen jeweils
kurzzeitig verweilt und dann zur nächsten Position springt. So könnten etwa zwei
Fangpunkte an den Enden eines Nanorods gewählt werden, um die Verweildauer der
optischen Falle dort, wo die Kraftausübung am größten ist, zu fokussieren. Bei der
Linienfalle hingegen oszilliert der Fokus kontinuierlich. Weiterhin denkbar wäre der
Einsatz eines spatialen Lichtmodulators (SLM), mit welchem zwei Fallen parallel in 3D
gesetzt werden können. Dies könnte eine Möglichkeit bieten Nanorods in beliebigen
Winkeln zur optischen Achse zu halten.
In bisherigen Studien [49, 70] wurden optisch manipulierte Nanorods nicht abgesetzt,
sondern durch den Strahlungsdruck gegen eine in Propagationsrichtung begrenzende
Oberfläche gedrückt. Hier wurde ein tatsächliches Absetzen eines ZnO Nanorods auf
einem Substrat gezeigt.
Nanorod in optischer Falle nahe begrenzender Wand
Ein interessantes Phänomen war zu beobachten, wenn ein Deckgläschen an ein ZnO
Nanorod in Wasser in einer Punktfalle heran gefahren wurde. Dabei richtete sich das
Nanorod gegen die optische Achse und entlang der Polarisationsrichtung aus. Durch
Drehen der Polarisationsrichtung konnte das Nanorod in der Polarisationsebene orientiert
werden. Das Nanorod richtete sich wieder entlang der optischen Achse aus, nachdem das
Deckgläschen weggefahren wurde.
Abb. 4.14 ZnO Nanorod in Punktfalle in der Nähe eines Deckgläschens. Bildabfolge eines
Mikroskopvideos und Schemaskizze. Vlnr: Nanorod ist wenige µm überhalb des
Deckgläschens (DG) vertikal in einer Punktfalle (Markierung) gefangen. Das DG wird
sukzessive nach oben gefahren. Das Nanorod neigt sich in die laterale Ebene. Die
Polarisationsrichtung des E-Feldes wurde gedreht. Das Nanorod dreht sich mit. Beim
Wegfahren des DG richtet sich das Nanorod wieder entlang der optischen Achse aus.
Scalebar 2.5µm.
49
4 Manipulation mit optischen Fallen
Wird das Nanorod durch das Deckgläschen hinreichend weit nach oben aus dem
Fokusvolumen herausgefahren, favorisiert es eine Orientierung in der lateralen Ebene.
Das Drehmoment ñ ò 7 ó [54, 61] auf das Nanorod verschwindet, wenn das
Dipolmoment ò des Nanorods (entlang dessen langer Achse) parallel zur
Polarisationsrichtung des E-Feldes ó ist und gibt damit die Ausrichtung des Nanorods
vor.
Eine eigenständige Rotation des Nanorods ohne Drehen der Polarisationsrichtung konnte
im Gegensatz zu Neves et al. [80] nicht festgestellt werden.
4.3.2
Frequenzverdopplung durch Nanorods
Im Rahmen der Manipulationsexperimente mit ZnO Nanorods wurde entdeckt, dass ein
ZnO Nanorod, welches durch einen Laserfokus (λ0=1064nm) gefahren wird dabei lokal
an der Stelle höchster Anregungsintensität leuchtet. Abb. 4.15a zeigt dazu eine
Bildabfolge eines in Agarosegel fixierten ZnO Nanorods. Eine Messung des
Emissionsspektrums zeigte einen einzigen Peak bei einer Wellenlänge von 532nm (siehe
Abb. 4.15b), was einen Beweis dafür liefert, dass Frequenzverdopplung (die Erzeugung
einer zweiten Harmonischen, SHG) vorlag. In Abschnitt 5.3 wird eine Methode
vorgestellt, wie diese zur Bestimmung einer statischen Orientierung eines Nanorods
ausgenutzt werden kann.
Abb. 4.15 ZnO Nanorod zeigt Frequenzverdopplung. a) Bildabfolge eines in Agarosegel
fixierten ZnO Nanorods. Bild1: das Nanorod befindet sich neben dem (unsichtbaren)
Laserfokus (Markierung). Weitere Bilder: Das Nanorod wurde durch den Laserfokus
(λ0=1064nm) gefahren und leuchtet lokal unter Aussendung von Photonen halber
Wellenlänge. Scalebar 3 µm. b) Emissions-Spektrum eines ZnO Nanorods in einem
Laserfokus. Ein einziger prominenter Peak liegt bei 532nm, der halben
Anregungswellenlänge (λ0=1064nm). Ein NIR Blockfilter vor dem Spektrometer blockte die
Anregungswellenlänge. Die Belichtungszeit war 500 ms.
Aus der Literatur geht hervor, dass die Frequenzverdopplung durch ZnO Nanorods
bekannt ist. Johnsen et al. [102] bestimmten mikroskopische nicht-lineare Koeffizienten
50
2. u. 3. Ordnung einzelner ZnO Nanorods mittels optischer Rasternahfeldmikroskopie
und des Weiteren Wellenleitereigenschaften von einzelnen ZnO Nanodrähten [103]. Chan
et al. untersuchten Frequenzverdopplung durch ZnO Nanorods bei gepulster Anregung
(λ0=800nm). ZnO ist ein Wurtzitkristall mit hexagonaler Struktur und
Punktgruppensymmetrie 6mm. Nach einer Näherung (nicht-resonante Wechselwirkung)
nach Kleinmann sind nur die zwei nicht-lineare Optik Koeffizienten zweiter Ordnung d333
und d311 relevant. |d333| liegt im Bereich von 7pm/V bis 18pm/V und |d311| im Bereich von
0.1pm/V bis 2.9pm/V abhängig vom Aspektverhältnis a=L/D des Nanorods. Je größer a,
desto größer d333 und d311. Eine SHG Verstärkung hängt eng zusammen mit lokalen
Feldeffekten und ist verbunden mit der länglichen Form der Nanorods. Eine Formel nach
Herman und Haydn wurde angegeben, mit der die SH Signalstärke unter
Berücksichtigung von Absorption berechnet wurde. [104]
Das et al. untersuchten die Frequenzverdopplung durch ZnO Nanorods unter
breitbandiger Anregung und insbesondere in Hinblick auf eine Polarisationsabhängigkeit.
Das SH Signal war abhängig von der Orientierung des Nanorods bzgl. der
Polarisationsrichtung, sowie von der Geometrie des Nanorods. Das maximale SH Signal
wurde für eine Orientierung des Nanorods senkrecht zur Polarisationsrichtung gefunden.
[105]
Die Frequenzverdopplung von Nanorods kann sehr interessant für photonische
Anwendungen sein. Um das große Potential aufzuzeigen, wird kurz auf die Studie von
Nakayama et al. [71] eingegangen. Im Sinne eines optischen Rasternahfeldmikroskops
(near-field scanning optical microscopy, NSOM) mit einem in Wasser in einer optischen
Falle gefangenen und gleichzeitig angeregten KNbO3 NW konnte eine künstliche,
subwellenlängen große Struktur abgebildet werden. NWs mit einer typischen Länge von
L=5.4µm und einer rechteckigen Querschnittsfläche von 0.17 x 0.19µm wurden mit
einem Fanglaser (λ0=1064nm) gefangen, richteten sich entlang der optischen Achse aus
und sendeten durch Frequenzverdopplung (engl. second harmonic generation, SHG)
Photonen doppelter Frequenz aus. Die Teststruktur wurde abgebildet, indem das
ortsabhängige SH Signal in Transmission aufgezeichnet wurde. Eine theoretische
maximale Quanteneffizienz von á%S ~10-5 wurde abgeschätzt, welche etwa doppelt so
hoch war, wie die experimentell erreichte. Mittels BFP Interferometrie wurde eine
typische laterale Auslenkung durch Fluktuationen von etwa 10nm bestimmt. Weiterhin
wurde festgestellt, dass der NW als Wellenleiter fungierte und das Licht an die Enden
leitete. Die Auflösung der Technik, als Nanodraht Rastermikroskopie (nanowire scanning
microscopy) bezeichnet, hing wesentlich von der Apertur der NWs ab. NWs mit der
kleinsten Querschnittsfläche lieferten die höchste Auflösung. Indem mit zwei
unterschiedlichen Wellenlängen angeregt wurde, konnten nach dem Prinzip von VierWellen-Mischung vier weitere Frequenzen erhalten werden. Das Abrastern einer Probe
mit NWs könnte stark parallelisiert werden mit mehreren NWs gleichzeitig in
holographischen optischen Fallen. SHG durch ZnO und Si NWs in Wasser in einer
optischen Falle konnte nicht festgestellt werden. Die zweite Ordnung Suszeptibilität ô 1%3 ,
welche zur Frequenzverdopplung notwendig ist, ist wesentlich abhängig von der
Kristallstruktur. [71]
In einer Studie von Dutto et al. [106], die nicht-lineare Antworten unterschiedlicher
Niobat NWs (NaNbO3, KNbO3, LiNbO3) in Wasser in einer optischen Falle untersuchte,
wurde gezeigt, dass LiNbO3 NWs die größte nicht lineare Antwort aufweist.
Darüber hinaus berichteten Wang et al. [107] davon, dass InP NWs in Wasser in einer
optischen Falle (λ=800nm, 30mW) nicht-linear angeregt werden konnten. Die Brownsche
51
4 Manipulation mit optischen Fallen
Bewegung der InP NWs (L=5-15µm) in der Falle wurde dabei mit BFP Interferometrie
getrackt.
4.4 Aufbauen funktioneller Bausteine
Mit optischen Fallen können Mikromaschinen betrieben werden [108, 109]. Einzelne
Komponenten einer Mikromaschine oder eines funktionalisierten Bauteils können auf
unterschiedliche Weise erschaffen werden. Kawata et al. [110] berichteten über 3D
Mikroformen mit subwellenlängen Strukturen, welche mittels laser-induzierter 2Photonen Polymerisation aus Volumenmaterial aus einem Stück gefertigt werden
konnten. Der beispielhafte wenige Mikrometer große Stier ist durch die Presse gegangen
[13]. Besonders interessant kann andererseits die in situ Komposition einzelner
Nanobausteine sein, welche mit optischen Fallen durchgeführt werden kann. MacDonald
et al. [111] berichteten von einer 3D Anordnung von 1µm Polystyrol Beads. Die Beads
wurden in einem Interferenzmuster von zwei überlagerten Gauß-Laguerre Strahlen mit
mehreren Fangpositionen gefangen. Die Anordnungen wurden allerdings nicht stabilisiert
und zerfielen, sobald die Strahlen unterbrochen wurden.
Hier wird beschrieben, wie sich funktionelle Mikroobjekte in einem „bottom-up“-Ansatz
aus einzelnen Komponenten aufbauen und kontrollieren lassen. Dazu wurden
verschiedene Beads als Bausteine verwendet, um eine größere Einheit aufzubauen. Mit
nur einer optischen Falle konnte aus einzelnen Beads eine stabile steife Kette definierter
Länge zusammengefügt werden. Die Beads wurden in eine wässrige NaCl Lösung
gegeben. Durch sukzessives Fangen einzelner Beads bildete sich in der optischen Falle
eine lineare Kette aus, welche sich entlang der optischen Achse ausrichtete. Das
Besondere ist, dass die neu gewonnene Struktur ohne optische Falle stabil war und nicht
zerfiel.
Abb. 4.16 Steife Kugelkette aus PS Beads. Sequenz von Mikroskopbildern einer steifen
Kugelkette in wässriger NaCl Lösung, die aus fünf einzelnen Polystyrol Beads mit
Durchmesser D=0.535 µm mit Hilfe einer optischen Falle aufgebaut wurde. Im ersten Bild
links ist die Kugelkette in einer Punktfalle gefangen und entlang der optischen Achse
ausgerichtet. Auf den weiteren Bildern sieht man die frei diffundierende Kugelkette ohne
optische Falle in unterschiedlichen Orientierungen. Im mittleren Bild liegt die Kugelkette
mit deren langer Achse etwa in der Fokusebene. Die einzelnen Beads lassen sich
erkennen.
52
Abb. 4.17 Zusammengebaute steife Kugelkette aus vier PS0.535 Beads mit Linienprofil.
Das Linienprofil der Intensitätsverteilung des Mikroskopbildes zeigt vier Maxima, eines für
jedes Bead in der Kette.
Für PS Beads mit D=0.535µm (Fa. Polysciences) ließen sich gerade Ketten bis zu einem
Aspektverhältnis von etwa L/D=7 formen. Längere Ketten neigten dazu eine Krümmung
oder Knicke aufzuweisen. Des Weiteren wurden Ketten aus noch kleineren Beads gebaut,
D~0.2µm. Außerdem konnten die Enden der Ketten fluoreszenz-markiert werden. Hierzu
wurde eine Mischung aus nicht-fluoreszenten Beads (PS 0.202µm, Fa. Polysciences) und
einer geringen Anzahl fluoreszenter Beads (PS 0.19µm, 480/520, Bangs Laboratories)
hergestellt. Zunächst wurde unter Hellfeldbeleuchtung eine Kette von nicht-fluoreszenten
Beads aufgebaut. Mit Fluoreszenzbeleuchtung konnten fluoreszente Beads sichtbar
gemacht werden. Durch Verfahren der Nanostage konnte ein fluoreszentes Bead in die
statische Punktfalle mit der bereits gefangenen Beadkette gezogen werden. Das
fluoreszente Bead ordnete sich an ein Ende der Kette an und somit war eine lineare
Struktur mit markiertem Ende aufgebaut. Eine solche Struktur könnte etwa als Hebel zum
Ausüben eines Drehmoments verwendet werden und die Fluoreszenzmarkierung könnte
zum Tracken der Orientierung dienen.
-ebnAbb. 4.18 Skizze und Mikroskopbilder einer Kette von Beads mit leuchtendem Ende
(fluoreszierendes Bead). Die Beads mit Durchmesser D=0.2µm in einer wässrigen NaCl
Lösung wurden nacheinander mit einer optischen Falle zusammengesetzt.
Diskussion und Ausblick
Das typische Fangobjekt bei optischen Fallenexperimenten ist ein Bead. Das Gros der
Versuche mit optischen Fallen wurde mit Beads durchgeführt. Ein Trend geht in die
Richtung sich kompliziertere Strukturen nützlich zu machen.
Zum einen ist es möglich mittels 2-Photonen Polymerisation dreidimensionale
Mikrostrukturen herzustellen [112]. Zum anderen können funktionelle Strukturen Stück
für Stück aufgebaut werden. Hong et al. [113] berichteten von der Zusammensetzung
53
4 Manipulation mit optischen Fallen
eines MOON (modulated optical nanoparticle) aus vier 1µm fluoreszenten Beads, welche
halbseitig mit Gold beschichtet waren. Damit konnte die Rotation entlang der langen
Achse eines zylindrischen Partikels gemessen werden.
Misawa et al. [114, 115] nutzten schon bereits Anfang der 90er Jahre optische Fallen in
Kombination mit einem UV-Anregungslaser, um in einer speziellen, wässrigen Lösung
mit Vinylmonomeren und weiterer photoreaktiver Chemie stabile, lineare Ketten aus 3µm
Polystyrol (PS) Beads zusammen zu bauen und zu manipulieren. Zwei Beads in der
Fokalebene wurden mit je einer Punktfalle zusammengeführt, mit einem UV Laser
(λ0=355nm) wurde auf die Kontaktstelle gepulst und eine stabile Verbindung entstand.
Längere Ketten konnten zusammengesetzt werden, indem eine bestehende Kette mit einer
scannenden Falle in der Ebene gehalten wurde und mit der anderen optischen Falle ein
neues Bead angehängt wurde.
Terray et al. [116] konnten durch Photopolymerisation mit Hilfe einer optischen Falle
(λ0=532nm) Strukturen aus Beads innerhalb eines mikrofluidischen Kanals aufbauen. Als
Anwendung wurde eine funktionierende Schleusenklappe gezeigt. Es wurde eine
spezielle Lösung verwendet, bestehend aus einem wässrigen Monomer und einer Lösung
zum Vernetzen (cross-linker solution). Es wurden lineare Ketten aus 0.64µm Glas Beads
und weitere komplexere Formen aus Beads unterschiedlicher Größe aufgebaut, welche in
der optischen Falle entlang der optischen Achse ausgerichtet waren. Durch die
Polymerisation ergibt sich jedoch ein Materialzuwachs an die Beads. Die minimale Breite
der Strukturen war etwa 1.5µm.
Hier wurde ein alternativer Ansatz aufgezeigt, mit welchem sich funktionelle
Mikrostrukturen in wässriger NaCl Lösung mit Hilfe einer optischen Pinzette aufbauen
lassen. Eine stabile Verbindung der Beads kommt vermutlich durch van der Waals Kräfte
zustande. Mit der ionischen Lösung können gleichartige Oberflächenladungen der Beads
abgeschirmt werden. Im Gegensatz zu anderen Studien [114-116] ist keine spezielle
Lösung für Polymerisation notwendig.
Interessant wäre weiterhin zu versuchen präparierte Beads direkt durch UV Anregung
und Polymerisation zu verbinden. Somit könnten stabile längere Ketten oder auch
beliebige Formen aufgebaut werden. Hierzu könnten etwa mehrdimensionalen
holographische Fallen verwendet werden. Zudem könnten Komponenten
unterschiedlicher Form kombiniert werden, wie etwa Beads und Nanorods [73, 117]. Eine
fixe Verbindung zwischen stark absorbierenden Nanodrähten konnten Agarwal et al. oder
auch Pauzauskie et al. [69, 70] durch lokales Erhitzen mit einer optischen Falle herstellen.
Zudem zeigten Agarwal et al. wie mehrere µm-lange CdS NWs in holographischen
optischen Fallen auf eine gewünschte Länge zurechtgeschnitten werden konnten.
Weiterhin interessant bleibt die Möglichkeit mit optischen Fallen Komponenten sowohl
zusammen zu fügen, als auch wieder voneinander entfernen zu können. Hernandez-Pozos
et al. [118] beschrieben eine Methode VOx Nanoröhrchen (NT) mit optischen Fallen zu
manipulieren, indem ein funktionalisiertes Glas Bead (D=2.7µm) als „Griffstück“
angehängt wurde. Dies bot eine Möglichkeit dafür die NTs zu manipulieren, welche
aufgrund hoher optischer Absorption nicht mit einer optischen Falle gefangen werden
konnten. Insbesondere konnte das Bead auch wieder entfernt werden. Die Rotation eines
VOx Bündels zwischen zwei Beads wurde gezeigt, sowie eine Anordnung von VOx
Bündeln in T- und Dreiecksform auf einem Deckgläschen.
Die Anwendbarkeit von Nanostrukturen kann insbesondere gesteigert werden in
Verbindung mit chemischer Manipulation, wenn Oberflächen funktionalisiert werden [48,
119, 120].
54
5 Tracking von Nanorods
Weshalb ist das Tracken von Nanorods ein wichtiges Thema in der heutigen
Wissenschaft und mit welchen unterschiedlichen Techniken wird gearbeitet? Der
folgende Einblick in aktuelle Studien soll Antworten auf diese zentralen Fragen geben.
Bevor der Fokus auf Studien mit Nanorods in optischen Fallen mit und ohne BFP
Interferometrie gerichtet wird, werden erst noch alternative Verfahren angesprochen.
Die naheliegendste Methode die Bewegung von Nanorods zu tracken ist mittels
konventioneller Videomikroskopie. Diese erlaubt insbesondere das simultane Tracking
mehrerer Partikel. Die zeitliche Auflösung, welche durch die Bildrate und die
Belichtungszeit texp des Detektors limitiert ist, wird mit HochgeschwindigkeitsVideotracking [121] durch immer schnellere und empfindlichere Kameras zusehends
höher. Otto et al. [122] berichteten von 6000 Bildern pro Sekunde (engl. frames per s,
f/s). Carberry et al. [117] erreichten sogar eine Bildrate von 50kHz.
Mit der Motivation Einsicht in fundamentale Diffusionsprozesse zu bekommen, um den
Transport in Membranen oder die Bewegung von anisotropen Makromolekülen zu
verstehen, bestimmten Han [123] et al. die Brownsche Bewegung von einzelnen
ellipsoidalen Partikeln in Wasser. Es wurde mittels Videomikroskopie (30f/s) die
Kopplung von Translation und Rotation, jedoch auf die xy-Ebene beschränkt, untersucht.
Colin et al. [124] konnten die Bewegung von Nanodrähten (NW) mit Längen L=1-100
µm, und einem Durchmesser von D=0.4µm für einen weiten Bereich von
Aspektverhältnissen mit einem ImageJ Plug-In auswerten, was hilfreich zur Bestimmung
von rheologischen Eigenschaften ist. Die Partikel diffundierten in einer Wasser-Glycerin
Lösung. Es wurde mit einer Bildrate von 10f/s aufgenommen. Insbesondere konnte die
Winkelauslenkung für Ѳ<50° aus der xy-Ebene bestimmt werden, mit Fehlern von ∆Ѳ<1°
bei Längen L>20 µm, ∆Ѳ<4° für L=10µm und ∆Ѳ<4° für L=2-3 µm. Die Bestimmung
der Translationen in der xy-Ebene wurde mit einer Genauigkeit von besser als 40nm
angegeben. Die Translation in z-Richtung konnte nicht bestimmt werden. Zudem wurden
Diffusionskonstanten ermittelt.
Mukhija et al. [125] untersuchten die 3D translatorische und rotatorische Bewegung von
fluoreszenten PMMA Nanorods (0.7 x 2.15 µm, L/D = 3.1, 0.5 x 3.65 µm, L/D = 7.0.)
mittels konfokaler Mikroskopie. Durch die Wahl eines viskosen Mediums mit Viskosität
von 2 Pa s konnte die Dynamik gedämpft und damit verzögert werden. Simultanes
Tracking von etwa 10 Nanorods in einem Volumen von 42 x 11 x 11 µm3, bei einer
Voxelgröße von 80nm wurde durchgeführt. Die bestimmten Diffusionskoeffizenten
wurden mit theoretischen von Doi [126] verglichen.
Mit Dunkelfeldmikroskopie konnten Xiao et al. [127] die Orientierung von Polar- und
Azimutwinkeln von plasmonischen Gold Nanorods (60 x 25nm) bestimmen, welche in
Wasser diffundierten. Mittels Entfaltung der experimentellen Bilder und Korrelation von
simulierten Bildern konnten die Winkel bestimmt werden. Dabei wurde ein Nanorod als
drei Dipole mit unterschiedlichen Polarisierbarkeiten entlang longitudinaler und
55
5 Tracking von Nanorods
transversaler Richtung betrachtet. Das Streufeld wurde aus einer Überlagerung der
Streufelder der drei Dipole erhalten.
Nanopartikel können dazu verwendet werden biologische Proben abzubilden. Speziell
sind solche aus Gold geeignet, da sie nicht blinken oder bleichen. Insbesondere können
Nanorods durch deren Form Orientierungsinformation geben und können daher als
Orientierungssensoren [128, 129] dienen. Chang et al. [130] zeigten eine statische
Bestimmung der Orientierung in der xy-Ebene von einzelnen Gold Nanorods (73 x 25nm)
mit einer polarisations-empfindlichen photothermischen Bildgebungsmethode.
Grier et al. [131, 132] verwendeten holographische Videomikroskopie (30f/s, texp=0.5ms),
um die 3D translatorische und rotatorische Diffusion von CuO Nanorods (5 x 0.2µm,
L/D=25) in Wasser zu tracken. Durch Rayleigh-Sommerfeld Rückpropagation wurde eine
3D Streuverteilung eines Nanorods erhalten, aus welcher sowohl dessen Dimensionen, als
auch dessen Raumlage bestimmt werden konnte. Es wurden Fehler von ∆θ = 1 °,
∆x = 10nm, ∆z = 50nm angegeben.
Ohmachi et al. [133] konnten die 2D Bewegung von Myosin V entlang eines
Aktinfilaments und zusätzlich die Rotation um dessen Achse bei jedem Schritt messen.
Dabei wurde die Polarisation eines stark fluoreszierenden Kern-Mantel Nanorods (CdSe
und CdS, 50 x 4nm) verwendet. Bei einer zeitlichen Auflösung von 33ms konnte eine
Winkelgenauigkeit von 10° erreicht werden.
Mit einer neuartigen Kombination von Interferometrie und Fluoreszenzmikroskopie
einzelner Moleküle konnten Kukura et al. [134] zum Verständnis der Bewegung von
Viren auf einer Plasmamembran beitragen. Bei einer zeitlichen Auflösung von 8ms
konnte die Position und Orientierung eines mit einem Quantenpunkt markierten
Simianvirus 40 verfolgt und somit Neues über dessen Dynamik auf einer
Doppellipidschicht gelernt werden.
Im Allgemeinen hat ein Partikel sechs Freiheitsgrade. Hong et al. [113] konnten zum
ersten Mal die Rotation entlang der langen Achse eines zylindrischen Partikels messen.
Dieses sogenannte MOON (modulated optical nanoparticle) war aus vier 1µm
fluoreszenten Beads, welche halbseitig mit Gold beschichtet waren, zusammengesetzt.
Der Rotationswinkel wurde anhand der Helligkeit jedes einzelnen Beads des Tetramers
mit einem Fehler von ∆Ψ<5° bestimmt. Eine Gaußsche Winkelverteilung wurde
festgestellt. Eine Simulation mit der Freeware HYDRO zeigte jedoch, die
Goldbeschichtung (~10% des Radius) nehme wahrnehmbaren Einfluss auf die
Hydrodynamik der Probe.
Tracking von zylindrischen Partikeln in einer optischen Falle
Wang et al. [58-60] nützten die Kopplung von Lichtpolarisation und einem
doppelbrechenden Quartzzylinder (1 x 0.5µm) zum Bestimmen der Orientierung (1D)
und Messen des übertragenen Drehmoments. Ein Quartzzylinder wurde mit einem DNA
Molekül verbunden und dessen Drehmoment bei einem Phasenübergang konnte bestimmt
werden.
Pelton et al. [74] gewannen quantitative Information über die Dynamik von frei
diffundieren und optisch gefangenen Goldnanorods (Au-NR) durch Autokorrelation (AC)
56
von 2-Photonensignalen (2PS). Dazu wurden ein in der Frequenz durchstimmbarer Laser
zum Fangen und ein zweiter Laser zum Anregen von 2-Photonenfluoreszenz verwendet.
Es wurde davon ausgegangen, dass sich die Au-NR in der Falle mit deren langer Achse
(48±9nm) entlang der Polarisation des elektrischen Feldes ausrichteten. Die AC des 2PS
von freien Nanorods zeigte zwei charakteristische Abfälle bei 5µs und 20µs, die auf
Rotation und Translation zurückgeführt wurden. Der 5µs Abfall fehlte bei gefangenen
Nanorods, was einen Beweis dafür lieferte, dass die optische Falle die rotatorische
Diffusion um die kurze Achse des Nanorods unterdrückte.
Neves et al. [80] gewannen Information über die Rotation in der xy-Ebene einer optisch
gefangenen PMMA Nanofaser (11.4 x 0.57µm, L/D=20) durch Detektion des
rückgestreuten Lichts mit einer Silizium QPD in der BFP. Die Nanofaser wurde in der
Nähe des Deckgläschens gefangen und war senkrecht zur optischen Achse orientiert. Mit
Fourier Analyse konnte eine Rotationsfrequenz bestimmt werden. Die verwendete
Detektion sei in Hinblick auf Genauigkeit und oberes Limit von detektierbaren
Rotationen und Frequenzen besser als Videomikroskopie.
Yogesha et al. [135] konnten die Rotation optisch gefangener asphärischer Mikropartikel
(6 x 4µm, Polystyrol Ellipsoid) bei Detektion des rückgestreutes Lichts im
Leistungsspektrum eines QPD Signals als charakteristische Frequenzen bestimmen.
Nanorod-Tracking mit optischer Falle und konventioneller BFP Interferometrie
Tatsächlich wurde das Tracking von zylindrischen Partikeln in einer optischen Falle
mittels konventioneller BFP Interferometrie theoretisch bereits 2004 von Kress et al.
[136] untersucht. Insbesondere wurde ein Vergleich mit einem Bead gleichen Volumens
vorgenommen mit Hinblick darauf, ob ein Nanorod eine geeignete Sonde zum Abtasten
von Oberflächen und zum Messen von Kräften und Drehmomenten sein könne, im Sinne
eines photonischen Kraftmikroskops (PFM) [5-7]. Es wurde ein Polystyrolrod (ns=1.57,
500x200nm, L/D=2.5) in einem hochfokussierten Laserfokus NA=1.2 mit einer
Wellenlänge von λ=800nm in Wasser betrachtet. Die QPD-Positionssignale wurden für
verschiedene Translationen im Fokusvolumen und verschiedene Orientierungen
bѲ=0°,5°,15°,30° und bФ=0°,45°, 90° analysiert. Während die Positionssignale des
Nanorods bei Ausrichtung entlang der optischen Achse sogar bessere Orthogonalität und
Linearität aufwiesen, als die des Beads, bei allerdings geringerer Sensitivität, wurde eine
starke Kopplung der Positionssignale verbunden mit einer Winkelauslenkung des
Nanorods gegen die optische Achse festgestellt. Durch Korrelieren der Positionssignale
könnte Information über die Orientierung gewonnen werden. Korrelationsanalysen von
Trackingsignalen sind eine Möglichkeit Rotation festzustellen und ein Drehmoment zu
messen. Das konnten Volpe et al. [137] theoretisch zeigen und experimentell an einem
optisch gefangenen 1µm Polystyrol Kügelchen bestätigen, mit Hilfe von
interferometrischem Tracking und einer geschickten Überlagerung eines Gaußschen
Fanglasers und einem zusätzlichen schaltbaren Laguerre Gaußstrahl mit optischen
Drehmoment.
Obwohl Kress et al. [136] eine Kopplung der Positionssignale bei der BFP
Interferometrie zeigte und Simpson et al. die nicht triviale anisotrope Bewegung von
asphärischen Objekten in einer optischen Falle [20] beschrieben, wurden Nanorods und
Nanodrähte unterschiedlicher Materialien und Ausdehnungen in Experimenten mit
57
5 Tracking von Nanorods
optischen Fallen mit konventioneller BFP Interferometrie getrackt. Insbesondere sei an
dieser Stelle noch darauf hingewiesen, dass sich das Problem der Orientierung eines
ausgedehnten Objekts in einer optischen Falle nicht ganz einfach beantworten lässt.
Prinzipiell sind Orientierungen parallel oder senkrecht zur optischen Achse möglich. Der
interessierte Leser sei auf Abschnitt 4.1.2 verwiesen.
Marago et al. [84] trackten die 3D Schwerpunktposition quasi eindimensionaler Bündel
(3µm x 11nm) einwändiger Carbon-Nanoröhrchen (CNTs) mit hohem Aspektverhältnis
a=L/D=273. (50kHz Abtastrate, über 2s, bei 20mW Fokusleistung). Unter Annahme
kleiner Winkelauslenkungen gegen die optische Achse wurden neue Funktionen der
Positionssignale aufgestellt. ~c ∝ ö sin1¼3, ~c ∝ ö sin1¼3 und ~ ∝ ù,
wobei X, Y, Z die Schwerpunktkoordinaten sind. a, b, c sind Kalibrationskontanten.
sin1¼3 und cos1¼3 sind die Projektionen auf die x- und y-Achse. Mit Hilfe von
Korrelationsanalysen konnten Fallensteifigkeiten für Translation und Rotation berechnet
werden.
In einer weiteren Studie berichteten Marago et al. [138] von BFP Interferometrie und
Korrelationsanalyse der QPD-Trackingsignale asphärischer Partikel zur Bestimmung
einer Rotationsfrequenz mit der Motivation von optischer Kontrolle über die Rotation
von Nanomaschinen. Mit der Trackingmethode könnten höhere Rotationsfrequenzen als
mit Videomikroskopie detektiert werden. Als Proben wurden zum einen ein längliches
mit einem Knick versehenes Bündel CNTs und zum anderen ein T-förmiges Aggregat aus
Gold-Nanorods mit einer optischen Falle gefangen. Für das CNT Bündel wurde eine
Orientierung entlang der optischen Achse festgestellt. Interessanterweise wurde für die
optische Falle eine schwache NIR Laserdiode verwendet, deren Strahlprofil erst mit
einem speziellen Prisma in runde Form gebracht wurde. Es konnte also nicht unbedingt
von einem TEM00 Gaußstrahl mit definierter Phasenfront ausgegangen werden. Dennoch
wurden für die QPD Signale folgende Funktionen aufgestellt: ~c 163 _163 1Ω63, ~p 163 l163 f1Ω63. Dabei wurde eine kontinuierliche Rotation um
die optische Achse angenommen. Eine Fluktuation von Polar- und Azimutwinkel wurde
vernachlässigt. Sowohl in der Autokorrelation, als auch in der Kreuzkorrelation der
Trackingsignale war eine Oszillation zu sehen. Daraus konnte eine Rotationsfrequenz des
CNT Bündels von wenigen Hz bestimmt werden. Für die T-förmige Goldprobe wurden
Trackingsignal-Funktionen mit einfacher und doppelter Frequenz aufgestellt, die auf
einen symmetrischen und einen nicht-symmetrischen Teil der Probe zurückgeführt
wurden und damit zwei Frequenzkomponenten erklären sollten.
In einer dritten Studie zeigten Marago et al. [139] wie optische Kräfte und Drehmomente,
sowie die Brownsche Dynamik von Nanodrähten (NW), welche mit einer optischen Falle
in Wasser gefangen wurden, von deren Länge abhing. Die Abhängigkeiten wurden mit
theoretischen Ergebnissen von Borghese et al. [140] verglichen. Dabei wurden Silizium
NWs (nSi=3.7, L=1, 2, 3, 4, 5µm x 10nm) mit Aspektverhältnissen L/D von 100 bis 500
verwendet und mit einer Laserleistung von 20mW @λ0=830nm gefangen. Die anisotrope
Hydrodynamik wurde mit einer Langevin-Gleichung beschrieben, jedoch wurde eine
Kopplung von Rotation und Translation vernachlässigt. Exponential- und
Doppelexponential-Fits an die Korrelationskurven ergaben laterale (max~11nm) und
axiale (max~70nm) mittlere Auslenkungen, sowie eine mittlere Winkelauslenkung von
7°. Die lateralen Fallensteifigkeiten κx,κy fielen mit zunehmender Länge ab und sättigten,
die axiale Fallensteifigkeit κz hingegen stieg zunächst mit der Länge an und sank wieder
58
ab, was auf eine dominierende Streukraft zurückgeführt wurde. Die Drehmoment
Konstante κθ stieg mit zunehmender Länge an.
Länge, Breite und Brechungsindex sowie Extiktionsquerschnitte beeinflussen die
optischen Kräfte, was wiederum die Bewegung in der optischen Falle beeinflusst.
Insofern könne man mit der Analyse der thermischen Bewegung mittels BFP
Interferometrie Eigenschaften von nanoskaligen Objekten charakterisieren [30]. Reece et
al. [30, 107, 141] untersuchten InP NWs (2-15µm x 30nm) unterschiedlicher Länge mit
hohen Aspektverhältnissen L/D=66.7-500 bzw. Bündel von NWs. NWs mit hohem
Brechungsindex und Längen, welche deutlich größer als die Fokusausdehnung waren,
richteten sich entlang der optischen Achse aus. Es wurden laterale Positionssignale
aufgezeichnet, welche mit Hilfe einer neuen „fast switching“ Methode kalibriert wurden,
vgl. Abschnitt 5.2. Die Detektorsignale zeigten eine charakteristische Form mit linearem
Bereich für kleine Auslenkungen (hier etwa ±200nm), wie sie von einem gefangenen
Bead bekannt ist [31]. Die lateralen Auslenkungen der NWs in der optischen Falle waren
Gaußsch verteilt, aber eine deutliche Polarisationsasymmetrie war erkennbar. Zur
Bestimmung der Fallensteifigkeiten wurden lineare Kräfte für kleine Auslenkungen
angenommen und Rotationen ausdrücklich vernachlässigt. Auf zwei unterschiedliche
Weisen wurden Fallensteifigkeiten bestimmt. Zum einen durch einen Lorentzfit an das
Leistungsspektrum (PSD), welche die Grenzfrequenz / gibt. Hier muss jedoch
der Reibungskoeffizient bekannt sein und daher die Geometrie des Objekts. Die zweite
Methode verwendete den Gleichverteilungssatz 1/2⟨_ % ⟩ 1/2b [. Die Auslenkungen
müssen in einer Längeneinheit vorliegen. Die Geometrie des Objekts muss indessen nicht
bekannt sein.
Selhuber-Unkel et al. [76] fingen und trackten Goldnanorods (Au-NR) in 3D. Es wurde
angenommen, dass die Au-NR (L=41…85nm, D = 8…44nm, L/D=1.7…5.6) sich mit
deren langer Achse entlang der Polarisationsrichtung des elektrischen Feldes ausrichteten
und Winkelfluktuationen wurden vernachlässigt. Die Fallensteifigkeiten für alle drei
Raumrichtungen wurden bestimmt. Au-NR könnten daher als Kraftsensoren und
biofunktionalisierte Au-NR könnten als Hebel zum Übertragen von Kräften im Bereich
von mehreren 10pN in Experimenten mit einzelnen Molekülen verwendet werden. Die
Fallensteifigkeiten hingen mit der Polarisierbarkeit der Au-NR zusammen. DDA
Simulationen mit der Freeware ADDA zeigten die Polarisierbarkeit hänge sowohl vom
Volumen, als auch vom Aspektverhältnis der Nanorods ab.
5.1 Nanorod in einer Punktfalle
Bisher gibt es kein Verfahren, sowohl die Position, als auch die Orientierung von nichtsphärischen Objekten mit BFP Interferometrie zu bestimmen. In vielen Anwendungen
kommen jedoch zylindrische Partikel vor, wie Nanorods, als elementare Bausteine von
Nanostrukturen, aber auch formverwandte Objekte, wie Ellipsoide oder stäbchenförmige
Bakterien. Deren Raumlage kann mit dem Raumlagevektor o , · , ¸ q mit oc , p , q, wie in Abb. 5.1 veranschaulicht, beschrieben werden.
59
5 Tracking von Nanorods
Abb. 5.1 Tracking eines Zylinders in einer optischen Falle mittels BFP-Interferometrie.
Eine Objektivlinse (OL) fokussiert einen Laserstrahl. Im Fokus ist ein Zylinder gefangen
mit Raumlagevektor o , · , ¸ q, bestehend aus dem Positionsvektor bzgl. des
Fokuszentrums und den Winkelkoordinaten · und ¸ , die den Polar- und Azimutwinkel
des Zylinders festlegen. Mit einer Detektionslinse (DL) wird gestreutes und ungestreutes
Licht aufgefangen und auf einen Sensor in der hinteren Brennebene BFPDL projiziert. Eine
Intensitätsverteilung aobc , bp , q wird detektiert. Daraus werden die Positions- und
Orientierungssignale ~c , ~p , ~ , ~· , ~¸ gewonnen.
In diesem Kapitel wird eine neue Methode zum Tracken der Raumlage eines Nanorods in
einer Punktfalle beschrieben und diskutiert. Darauf hinführend werden zunächst ein
analytisches Modell zur Streuung an einem Zylinder und eine Computersimulation zur
Berechnung von Intensitätsverteilungen in der BFP für einen Zylinder in einem
Laserfokus beschrieben.
Wie in Abschnitt 2.3 erläutert, können mit den vier Signalen einer Quadrantenphotodiode
die Auslenkungen eines Beads in die drei Raumrichtungen bestimmt werden. Jedoch
reichen vier Signale nicht zur Bestimmung von fünf voneinander unabhängigen
Unbekannten aus. Es stellen sich die beiden Fragen, a) wie wenigstens fünf Signale
generiert werden können und b) mit welcher Art von Detektor sich die Signalaufnahme
realisieren lässt.
Beim Tracken eines Beads mittels BFP Interferometrie wird die Positionsinformation aus
der Intensitätsverteilung in der hinteren Brennebene des Fokus gewonnen. Um die
Methode auf ein asphärisches Objekt anzuwenden, muss ein Zusammenhang zwischen
einer Änderung der Intensitätsverteilung und der Raumlage des streuenden Objekts im
Fokus gefunden werden.
5.1.1
Analytisches Modell zur Streuung an einem Zylinder
Die Berechnung der Streuung an einem Zylinder wird insbesondere komplex, wenn der
Zylinder in einem hoch fokussierten Feld ist. Ein solches setzt sich gemäß Fourier Optik
aus einer Überlagerung von ebenen Wellen zusammen, siehe Abschnitt 2.2. Um einen
Zugang zu diesem Streuproblem zu bekommen, lohnt es sich die Zylinderstreuung an nur
einer ebenen Welle zu betrachten.
60
Als anregendes Feld sei eine ebene Welle mit Wellenvektor ki angenommen, was eine
konstante Anregungsamplitude M impliziert. Damit gilt für das Streufeld im k-Raum,
gemäß Gl. (3.14)
Mn 1, 3 ' b %
&
M °n 13̃ ]k 1, 3 `Q 1\À 3»
12j3J
(5.1)
und somit ist das Streufeld proportional zum Formfaktor mal einem Phasenterm
Mn 1, 3~̃ ]k 1, 3 `Q 1\À 3»
(5.2)
Für einen symmetrischen Streuer im Koordinatenursprung ist der Formfaktor reell. Das
Streufeld ist also bereits in einen Betrag und einen Phasenterm Q 1\À 3» Q ËÌ 1,» 3
zerlegt.
Aus Gl. (5.2) lässt sich ersehen, dass durch die Form des Zylinders, welche mit dem
Formfaktor ̃ ]k 1, 3 ` eingeht, eine Amplitudenmodulation des Streufeldes
vorliegt, die insbesondere rein von der Orientierung o· , ¸ q abhängt. Für einen
Rayleighstreuer ist der Formfaktor ̃ 1þ3 1 hingegen konstant, vgl. Tabelle 8.1 im
Anhang.
Die Phasenfunktion Φ 1, 3 im Exponentialterm von Gl. (5.2) ist rein
positionsabhängig und setzt sich aus einer Phasenmodulation durch die Auslenkung des
Streuers und einer Phasenverschiebung mit der Phase, die der Streuer am Ort bt sieht,
zusammen.
Φ 1, 3 (5.3)
Für den Fall, dass der Streuer sich im Koordinatenursprung befindet ( =0), fällt der
komplexe Phasenterm in Gl. (5.2) weg und es folgt
Mn 1, 3~̃ ]k 1, 3 `
(5.4)
Geht man weiterhin von einer festen Phase von j/2 des ungestreuten Feldes in der BFP
aus, so verschwindet der Interferenzterm der Intensitätsverteilung, welcher allgemein aus
Gl. (2.15) resultiert. Die gesuchte Differenzintensitätsverteilung wird somit durch das
Betragsquadrat
des
Streufeldes
und
insbesondere
durch
dessen
rein
orientierungsabhängige Amplitudenmodulation bestimmt.
%
ayy obc , bp , N q Mn obc , bp , N q
(5.5)
Die Modulation ist durch die typischerweise kleine Amplitude des Streufelds schwach.
Dies erklärt, weshalb eine reine Winkelauslenkung nur eine betragsmäßig kleine
Modulation der Intensitätsverteilung bewirkt, siehe Abb. 5.7e weiter unten, Seite 69.
Der Formfaktor ̃ 13 eines Zylinders (im Koordinatenursprung) mit Länge L und
Durchmesser D lautet
61
5 Tracking von Nanorods
̃ 13 1/23% A 1b /23
âf
1b â/23
b /2
(5.6)
mit Besselfunktion A 1b /23 erster Ordnung und erster Gattung, wobei b bc% bp% .
Zur Vereinfachung eignet es sich einen dünnen Zylinder (D<λ) als delta-Linie
anzunähern mit Formfaktor
̃ 13 âf
1b â/23
(5.7)
Somit reduziert sich die Abhängigkeit im k-Raum auf die kz-Komponente. Eine Rotation
des Zylinders wird ausgedrückt, indem b mit bk 1, ¼3 Pp 13 ∙ Pk 1¼3 ∙ ∙ ersetzt
wird, mit den Rotationsmatrizen gemäß Gl. (3.9) und Einheitsvektor 10,0,13 . Unter
Berücksichtigung, dass · und ¸ für eine Rotation im Uhrzeigersinn definiert sind folgt
bk o· , ¸ q f1· 3
o¸ qbc f1· 3fo¸ qbp 1· 3b
(5.8)
Mit einer Ewaldkonstruktion [36] lässt sich für den Fall einer reinen Winkelauslenkung
des Zylinders (mit Schwerpunkt im Koordinatenursprung) der Einfluss von dessen
Orientierung auf das Streufeld Mn obc , bp , N q und damit auf die Intensitätsverteilung
ayy obc , bp , N q in der BFP anschaulich verständlich machen.
Hierzu sei beispielhaft ein Zylinder betrachtet (mit =0), der um =20° in die xz-Ebene
(¸ =0) geneigt ist und auf den eine ebene Welle mit Wellenvektor 10,0, b3 einfällt,
siehe Abb. 5.2a. Der Zylinder sei als delta-Linie genähert. In Abb. 5.2b ist der Formfaktor
̃ ]k 1, 3 ` gemäß Gl. (5.4) für die kxkz-Ebene bei ky=0 gezeigt. Entsprechend
dem Streuer im Ortsraum ist der Formfaktor als Funktion im k-Raum rotiert. Bei der
Ewaldkonstruktion zeichnet man einen Kreis mit Zentrum im Ursprung des kxkzKoordinatensystems und die um verschobene Verteilung des Formfaktors. Der Kreis
in der kxkz-Ebene repräsentiert die Ewaldkugelschale mit Radius k. Jeder Punkt auf dem
Kreis entspricht einer ebenen Welle des gestreuten Fernfeldes, welches durch genau die
ebene Welle mit Wellenvektor angeregt wurde. Die Amplitude einer ebenen Welle des
Streufeldes mit Wellenvektor ist proportional zum Wert des Formfaktors, der an
entsprechender Stelle farbkodiert hinterlegt ist. Typischerweise kann von einer
Detektionslinse mit Û $ f1(3 nur ein Teil der ebenen Wellen eingefangen
werden. Die detektierbaren Raumfrequenzen sind somit auf ein Kreissegment im
Winkelbereich ±α beschränkt. Projiziert man nun die Werte des Kreissegments auf die
kx-Achse, so erhält man ein kx-Linienprofil des Streufeldes. Abb. 5.2c zeigt das
%
Betragsquadrat des Streufeldes Mn 1bc 3 der delta-Linie. Der Schwerpunkt der Kurve ist
in kx-Richtung versetzt.
62
Abb. 5.2 Streuung von ebener Welle an Zylinder und Ewaldkonstruktion zur Berechnung
des Streufeldes. a) Einfallende ebene Welle mit Wellenvektor und Zylinder (Länge L)
mit Schwerpunkt im Koordinatenursprung, der um bѲ=20° in die xz-Ebene verkippt ist. b)
Formfaktor ̃ 1bc , b b, · 3 einer delta-Linie mit Raumlage des Zylinders und
Ewaldkonstruktion (siehe Text oben). c) kx-Projektion (betragsquadriert) des Streufeldes
Mn 1bc 3. In die Kurve ist zusätzlich ein Schwellwert valthresh eingezeichnet. Für die Werte der
Funktion, die größer als der Schwellwert sind, wurde ein Schwerpunkt kxc berechnet und
ebenfalls eingezeichnet. Die Kurve entspricht der Differenzintensitätsverteilung in der BFP
entlang kx (@ky=0) für einen dünnen verkippten Zylinder mit Länge L.
In der Formel des Formfaktors der delta-Linie, Gl. (5.7), lässt sich des Weiteren der
Einfluss der Zylinderlänge erkennen. Je länger der Zylinder ist, desto höher ist die
Frequenz der sinc-Funktion und desto schmäler ist in Folge die Breite der
Intensitätsmodulation (o. Abb.).
Eine quadrierte Projektion der Verteilung der Ewaldkonstruktion auf die kx-Achse kann
die erwartete Abhängigkeit für unterschiedliche Auslenkwinkel eines Zylinders in die xzEbene liefern. Je weiter der Zylinder in die xz-Ebene verkippt ist, desto weiter ist der
Schwerpunkt der Differenzintensitätsverteilung in der BFP in kx-Richtung ausgelenkt, s.
Abb. 5.3. Dazu wurden Intensitätsverteilungen ayy obc , bp , · q gemäß den Gl. (5.4) und
(5.5) für einen Zylinder, der als delta-Linie genähert wurde, berechnet.
63
5 Tracking von Nanorods
Abb. 5.3 a,b,c) Differenzintensitätsverteilungen ayy obc , bp , · q in der BFP für einen
dünnen Zylinder. Der Zylinder befindet sich im Koordinatenursprung und ist in die xzEbene mit unterschiedlichen Winkelauslenkungen bѲ verkippt. Der Zylinder wurde als
delta-Linie beschrieben. d) dazugehörige Linienprofile ayy obc , bp 0, · q in a.u..
Des Weiteren zeigt sich, dass der Schwerpunkt der Differenzintensitätsverteilung in der
BFP entsprechend des Azimutwinkels ¸ des Zylinders mit dreht. In Abb. 5.4 sind
Differenzintensitätsverteilungen für eine delta-Linie, welche gegen die z-Achse
ausgelenkt und um unterschiedliche Azimutwinkel rotiert ist, dargestellt.
Abb. 5.4 Differenzintensitätsverteilungen ayy obc , bp , · , ¸ q in der BFP für einen dünnen
Zylinder. Der Zylinder befindet sich im Koordinatenursprung und ist bei unterschiedlichen
Azimutwinkeln ¸ um · =20° gegen die z-Achse ausgelenkt. Der Zylinder wurde als deltaLinie beschrieben. Zudem sind jeweils ein Schwerpunkt der Intensitätsverteilung, sowie
dessen Abstand vom Ursprung und dessen Winkelauslenkung von der kx-Achse
eingezeichnet.
Des Weiteren sollen die Auswirkungen auf die Intensitätsverteilungen in der BFP für eine
reine Translation des Zylinders und für eine Kombination von einer Translation und einer
Rotation betrachtet werden. Abb. 5.5 zeigt Differenzintensitätsverteilungen
ayy obc , bp , q für eine delta-Linie mit Länge L, welche um bx=0.1µm ausgelenkt ist. Es
werden drei Auslenkwinkel in die xz-Ebene · = -11.5°; 0; +11.5° betrachtet. Die
Differenzintensitätsverteilungen berechnen sich als Summe zweier Terme gemäß
%
ayy obc , bp , q Mn obc , bp , q Mn obc , bp , qfhΦ obc , bp , qi
(5.9)
Die Linienprofile in Abb. 5.5 zeigen die Differenzintensitätsverteilung ayy 1bc , 3,
%
sowie deren Summanden, das Betragsquadrat des Streufeldes Mn obc , bp , q und den
Interferenzterm Mn 1bc , N 3f]Φ 1bc , 3` jeweils für die drei Raumlagen der delta-
64
Linie und an der Stelle bp =0. Der Betrag des ungestreuten Feldes in der BFP wurde
angenommen als Mn 1 und erscheint daher nicht im Interferenzterm. Das Streufeld
lautet
Mn obc , bp , q ∝ M M âf
hobk obc , bp , q b$ qâ/2iQ ËÌ ors ,rw ,»q
(5.10)
mit Phase Φ obc , bp , q bc c bc c ob obc , bp q b$ q , wobei b obc , bp q A/%
ob % bc% bp% q . Für die Notation in Gl. (5.9) wurde berücksichtigt, dass der Betrag
des Streufeldes in der vorgenommenen Näherung rein von der Rotation, die Phase des
Streufeldes hingegen rein von der Translation abhängt. Die Parameter wurden
folgendermaßen gesetzt: Anregungsamplitude M 1, Antwortamplitude M 0.05,
b 2j/ mit 1, Länge â 3 und Wellenzahl der einfallenden ebenen Welle
b$ b.
Abb. 5.5 Differenzintensitätsverteilungen ayy obc , bp , q in der BFP für einen dünnen
Zylinder, der bei drei unterschiedlichen Orientierungen in die xz-Ebene mit · um c (in
Einheiten von 0.1) ausgelenkt ist. Der Zylinder wurde als delta-Linie (mit Länge L)
beschrieben. In jeder Reihe sind jeweils die Lage der delta-Linie im
Koordinatensystemsystem, ayy obc , bp , q und Linienprofile dargestellt.
Aus den Differenzintensitätsverteilungen in Abb. 5.5 geht hervor, dass eine Auslenkung
der delta-Linie in x-Richtung eine Modulation in kx-Richtung bewirkt, wie aus Gl. (5.9)
aufgrund des Interferenzterms zu erwarten ist. Zusätzlich kann man feststellen, dass bei
einer Winkelauslenkung · der delta-Linie die Modulation in kx-Richtung versetzt. Es
gilt jedoch herauszustellen, dass der Interferenzterm sich aus zwei Komponenten
zusammensetzt. Da sind zum einen der Sinusterm, welcher die phasenbedingte
Modulation bewirkt, und zum anderen der Betrag des Streufeldes, welcher den Sinusterm
gewichtet. In dem vorliegenden Fall, bei dem die delta-Linie in die xz-Ebene orientiert
und um c ausgelenkt ist, wird der Sinusterm asymmetrisch gewichtet. Insofern liegt eine
65
5 Tracking von Nanorods
Kopplung zwischen Rotaion und Translation vor. Es liegt hingegen keine Kopplung vor,
falls bei einer Orientierung in die xz-Ebene die Auslenkung in y-Richtung ist (Abb. 5.6).
Abb. 5.6 Differenzintensitätsverteilung ayy obc , bp , q in der BFP für einen dünnen
Zylinder, der bei einer Orientierung in die xz-Ebene mit · um p (in Einheiten von 0.1)
ausgelenkt ist. Der Zylinder wurde als delta-Linie (mit Länge L) beschrieben. Es sind die
Lage der delta-Linie im Koordinatensystemsystem, ayy obc , bp , q und Linienprofile
dargestellt.
Für eine allgemeinere Aussage lassen sich ein Orientierungsvektor definieren, der vom
Schwerpunkt der delta-Linie zu deren Spitze zeigt, und ein weiterer 2D Vektor ,cp , der
sich aus der Projektion von in die xy-Ebene ergibt. So kann man zusammenfassen,
dass eine Kopplung von Orientierung und Auslenkung vorliegt, falls der Vektor oc , p q
für eine Auslenkung der delta-Linie in der xy-Ebene nicht senkrecht auf den projizierten
Richtungsvektor steht, also falls ,cp ∙ oc , p q 0 gilt. Eine solche Kopplung bewirkt,
dass die phasenbedingte Modulation der Intensitätsverteilung nicht sinusförmig ist.
Mit der starken Vereinfachung des vorliegenden Problems eines Nanorods in einem
hochfokussierten Feld durch Annahme einer delta-Linie, die an einer entlang der
optischen Achse propagierenden ebenen Welle streut, konnte ein Versatz der Modulation
der Intensitätsverteilung in der BFP, welcher von der Orientierung des Streuers im
Koordinatenursprung abhängt, erklärt werden.
5.1.2
BFP Intensitätsverteilungen von Nanorod in Laserfokus
In diesem Abschnitt werden die numerischen Berechnungen mit einer
Computersimulation vorgestellt. Es wurde die Vorwärtsstreuung eines hochfokussierten
Laserstrahls an dielektrischen Zylindern im Rayleigh Gans-Regime (siehe Abschnitt
3.1.2) berechnet und daraus mit kohärenter Überlagerung von gestreutem und
ungestreutem Feld die Intensitätsverteilung in der BFP der Detektionslinse. Die zur
Berechnung angewendete Kombination aus Rayleigh-Gans Streutheorie und Fourier
Optik wird ausführlich in Ref. [36, 136] beschrieben.
Folgende Gegebenheiten wurden angenommen: ein vektorieller, hochfokussierter
Gaußstrahl mit einer Vakuumwellenlänge von λ0=1064nm und eine numerische Apertur
der Objektivlinse von NA=1.2 bei Wasserimmersion. Die hintere Brennebene der
Objektivlinse wurde zweifach überstrahlt. Das einfallende Licht war linear x-polarisiert.
Das Probenmedium war Wasser mit einem Brechungsindex von $ =1.33 (Wellenlänge
in Wasser /$ =800nm). Die numerische Apertur der Detektionslinse war
Ûð $ f1(3 1.2. Der Detektionsradius in der BFP der Detektionslinse war
66
somit etwa 0.9b, mit Wellenzahl b 2j/. Das entspricht einem maximalen
Auffangwinkel von (=64.5°. Die berechnete BFP war als ein Array mit 33x33 Pixel
diskretisiert, wobei nur diejenigen Pixel innerhalb einer Kreisfläche (wegen der
kreisförmigen Apertur eines Objektivs) mit Pixelradius ≤ 16 Information enthielten.
Des Weiteren wurde eine Wahrscheinlichkeitsdichteverteilung e13 der Raumlagen des Zylinders im Fokus angenommen. Mit dieser kann ein Maß dafür angegeben werden,
wie relevant welcher Bereich im 5D Aufenthaltsvolumen des Nanorods ist. Somit ließ
sich insbesondere der Parameterraum der Simulationen, welcher den Bereich der fünf
Variablen definiert, sinnvoll eingrenzen. Die Wahrscheinlichkeitsdichteverteilung ist über
alle Raumlagen integriert auf 1 normiert.
Vernachlässigt man eine Kopplung von Translation und Rotation des Zylinders, ergibt
sich die gesamte Wahrscheinlichkeitsdichteverteilung aus dem Produkt derjenigen von
Positionen und Orientierungen.
e13 e1 3eo¸ qe1· 3
(5.11)
Unter Annahme linearer, optischer Rückstellkräfte für kleine Auslenkungen des Zylinders
sind die Ortsauslenkungen gemäß Gl. (2.26) normalverteilt. Ebenso sei ein lineares
Rückstellmoment für kleine Winkelauslenkung gegen die optische Achse angenommen.
Damit ist die Koordinate · normalverteilt. Der Azimutwinkel des Zylinders sei hingegen
(unter Näherung eines radialsymmetrischen Fokus) gleichverteilt.
e1 3 ∏ e1· 3 A
√%z«
Q
\9:
9 :
\ 4 8
A
Q : √/:« 13
(5.12)
:
(5.13)
eo¸ q 1/12j3
(5.14)
wobei ö = x, y, (z-z0) mit axialer Auslenkung z0 des Fallenzentrums vom Fokuszentrum,
: s:
sowie ¬ = ¬c , ¬p , ¬ und QK^1ë3 √
c mit ë .
Á| 0
√:
Unter Annahme kleiner Ortsauslenkungen und kleiner axialer Winkelauslenkung, sowie
unter Berücksichtigung der Symmetrie wurde ein Parameterraum gewählt, wie in Tabelle
5.1 aufgelistet. Dies ergibt 6300 Zustände bzw. Raumlagen eines Zylinders mit Länge L,
Durchmesser D und Brechungsindex ns im Fokusvolumen.
67
5 Tracking von Nanorods
Koordinate
Bereich
Inkrement
bx
by
bz
bθ
bФ
-0.2 … 0.2µm
-0.2 … 0.2µm
-0.2 … 0.6µm
0 … 30°
0 … 90°
dx = 0.1µm
dy = 0.1µm
dz = 0.1µm
dθ = 10°
dФ = 15°
Anzahl
Zustände
5
5
9
4
7
Tabelle 5.1 Parameterraum der Simulation mit Definitionsbereich der fünf Variablen,
welche die Raumlage des Zylinders im Fokus bestimmen.
Darüber hinaus wurden unterschiedliche Brechungsindizes, Zylinderlängen und
Durchmesser variiert. Sofern nicht explizit erwähnt, wird stets auf einen Zylinder mit
Länge L=0.8µm und Durchmesser D=0.1µm Bezug genommen.
Die Intensitätsverteilung in der BFPDL lässt sich prinzipiell mit der
Zweistrahlinterferenzformel gemäß Gl. (2.15) formulieren. Für typische Proben ist das
gestreute Feld betraglich zwei bis drei Größenordnungen kleiner, als das ungestreute.
Hieraus geht hervor, dass Änderungen bezüglich unterschiedlicher Raumlagen eines
Streuers im Fokus nur eine schwache Modulation auf einem hohen Offset ausmachen.
%
Daher bietet es sich an, die Intensität a obc , bp q Mn obc , bp q des ungestreuten Feldes
zu subtrahieren und somit eine Differenzintensitätsverteilung ayy obc , bp , q zu
betrachten.
%
ayy obc , bp , q Mn obc , bp q Mn obc , bp , q a obc , bp q
(5.15)
Simulationsergebnisse
In Abb. 5.7 sind berechnete Differenzintensitäten für einen Zylinder mit Länge L=0.8µm
und Durchmesser D=0.1µm für unterschiedliche Raumlagen im Fokus dargestellt.
Hieraus lassen sich einige wichtige Eigenschaften herauslesen. Im Gegensatz zum Fall
eines Rayleighstreuers sind die Intensitätsmodulationen nicht über den ganzen
Detektionsbereich ausgedehnt, sondern konzentrieren sich auf einen kleineren
kreisförmigen Bereich. Ist der Zylinder nur ausgelenkt und nicht verkippt (Abb. 5.7a-d),
ist also die lange Zylinderachse mit der optischen Achse parallel (· 0), so gleichen
die Intensitätsmuster prinzipiell denen, wie sie für ein entsprechend ausgelenktes Bead
bekannt sind. Für eine reine axiale Auslenkung (Abb. 5.7b) ist die Intensitätsverteilung
radialsymmetrisch. Bei einer Auslenkung in eine laterale Richtung ergibt sich eine
Modulation entlang der Auslenkrichtung. Der Schwerpunkt der Intensitätsmodulation ist
zentral.
Für den Fall hingegen, dass der Zylinder gegen die optische Achse verkippt ist (· ¦ 0),
versetzt der Schwerpunkt der Intensitätsverteilung. Eine Definition des Schwerpunkts
findet sich im Anhang 8.7. Der Schwerpunktversatz ist in kx-Richtung, falls ¸ =0 (siehe
Abb. 5.8). Ist der Zylinder um einen Polarwinkel · und um einen Azimutwinkel ¸
ausgelenkt (Abb. 5.7e,f), so ist auch der Schwerpunkt der Intensitätsverteilung zusätzlich
um den Winkel ¸ ausgelenkt. Weiter lässt sich feststellen, je größer die
Winkelauslenkung · ist, desto weiter ist der Schwerpunktversatz.
68
Abb. 5.7 Berechnete Differenzintensitätsverteilungen aobc , bp , q in BFPDL für einen
Zylinder mit Länge L=0.8µm und Durchmesser D=0.1µm bei unterschiedlichen Raumlagen
oc , p , , · , ¸ q im Fokus. Die Farbkodierung (in a. u.) ist jeweils autoskaliert.
Translationen sind in Einheiten von 0.1µm angegeben. a-d) Der Zylinder ist bei
unterschiedlichen Auslenkungen parallel zur optischen Achse (entlang der z-Richtung)
ausgerichtet. e) Der Zylinder ist um einen Polarwinkel · und um einen Azimutwinkel ¸
ausgelenkt. f) Der Zylinder ist sowohl translatorisch um c , als auch rotatorisch um · und
¸ ausgelenkt. In die Differenzintensitätsverteilungen e,f sind ein Schwerpunkt (SP),
dessen Abstand vom Ursprung und dessen Winkelauslenkung von der kx-Achse
eingezeichnet.
In Abb. 5.8 sind weitere Differenzintensitäten für den simulierten Zylinder mit einer
festen Orientierung in die xz-Ebene mit · =20° abgebildet. Der Schwerpunkt der
Intensitätsmodulation ist in kx-Richtung versetzt. Für eine reine laterale Auslenkung des
Zylinders liegt eine Modulation entlang der Achse vor, in die der Zylinder ausgelenkt
wurde. Dies ist nicht mehr erfüllt für eine zusätzliche axiale Auslenkung des Zylinders
außer für den Fall b=(1,0,2). Auf diesen Spezialfall wird weiter unten noch genauer
eingegangen.
In Abb. 5.9 sind weitere Differenzintensitäten für den simulierten Zylinder mit einer
festen Orientierung mit · =20° und ¸ =45° abgebildet. Der Schwerpunkt der
Intensitätsmodulation ist versetzt und um 45° gegen die kx-Richtung rotiert. Für eine
reine laterale Auslenkung des Zylinders liegt eine Modulation entlang der Achse vor, in
die der Zylinder ausgelenkt wurde. Dies ist nicht mehr erfüllt für eine zusätzliche axiale
Auslenkung des Zylinders.
69
5 Tracking von Nanorods
=0
bt=(0, 1, 0)
ky
0.0
ky
0.0
0
0
0.5k
-10
-0.5k
Idiff(kx,ky)
0
ky
0.0
0.5
Idiff(kx,ky)
5
0
-5
bt=(1, 1, 2)
bt=(0, 1, 2)
bt=(1, 0, 2)
-5
0.5k
0.5k
0.5k
0.5k
bt=(0, 0, 2)
5
bt=(1, 1, 0)
5
-2
-5
10
kx
0.0
2
0.5
-0.5
-0.5
0
-0.5k
Idiff(kx,ky)
kx
0.0
5
0.5
kx
0.0
-0.5k
Idiff(kx,ky)
-0.5
0.5
kx
0.0
-0.5k
Idiff(kx,ky)
-0.5
bt=(1, 0, 0)
0.5
-5
-5
ky
0.0
ky
0.0
-0.5
0
bt=(0, 0, 0)
-0.5k
Idiff(kx,ky)
kx
0.0
0.5
5
-5
0.5k
0.5k
ky
0.0
-0.5
0
-0.1
-0.5k
Idiff(kx,ky)
kx
0.0
0.5
0.5k
0.0
ky
0.0
5
0.1
kx
0.0
-0.5k
Idiff(kx,ky)
-0.5
0.5
-0.5
-0.5k
ky
0.0
kx
0.0
=20°,
Abb. 5.8 Berechnete Differenzintensitätsverteilungen aobc , bp , q in BFPDL für einen
Zylinder (L=0.8µm, D=0.1µm) mit fester Orientierung · =20°, ¸ =0 bei unterschiedlichen
Auslenkungen oc , p , q relativ zum Fokuszentrum. Die Farbkodierung (in a. u.) ist
jeweils autoskaliert. Translationen sind in Einheiten von 0.1µm angegeben. Die
Verteilungen in der oberen Reihe sind ohne ( =0), die in der unteren Reihe mit axialer
Auslenkung ( =0.2µm).
=45
-0.5
0
kx
0.0
bt=(1, 0, 0)
bt=(0, 1, 0)
ky
0.0
ky
0.0
-5
bt=(1, 0, 2)
-0.5
0
Idiff(kx,ky)
10
5
0
-5
-10
-0.5k
Idiff(kx,ky)
0
-10
bt=(0, 1, 2)
0.5
b1.0_1.0_0.0_45_20
t=(1, 1, 0)
10
kx
0.0
-0.5
5
0.5
0.5k
0.5k
-5
-0.5k
Idiff(kx,ky)
kx
0.0
kx
0.0
0
0.5
0.5k
-0.5
5
bt=(0, 0, 2)
-0.5k
Idiff(kx,ky)
ky
0.0
0.5k
-5
ky
0.0
0.5
-0.5k
5
bt=(0, 0, 0)
-0.5k
Idiff(kx,ky)
ky
0.0
0.5
Idiff(kx,ky)
10
-0.5
0.5k
0.5k
-5
0.5
0
kx
0.0
0
ky
0.0
-10
0.5k
5
-0.1
-0.5k
Idiff(kx,ky)
-0.5
0.5
kx
0.0
0.0
ky
0.0
0.5k
0.1
kx
0.0
-0.5k
Idiff(kx,ky)
-0.5
0.5
-0.5
-0.5k
ky
0.0
kx
0.0
=20°,
bt=(1, 1, 2)
Abb. 5.9 Berechnete Differenzintensitätsverteilungen aobc , bp , q in BFPDL für einen
Zylinder (L=0.8µm, D=0.1µm) mit fester Orientierung · =20°, ¸ =45° bei unterschiedlichen
Auslenkungen oc , p , q relativ zum Fokuszentrum. Die Farbkodierung (in a. u.) ist
jeweils autoskaliert. Translationen sind in Einheiten von 0.1µm angegeben. Die
Verteilungen in der oberen Reihe sind ohne ( =0), die in der unteren Reihe mit axialer
Auslenkung ( =0.2µm).
Es stellte sich heraus, dass insbesondere eine Kombination von axialer Ortsauslenkung in
Kombination mit einer Winkelauslenkung zu einer Kopplung der Signale führt. Abb. 5.10
zeigt Differenzintensitäten in der BFP für einen Zylinder, der sowohl axial ausgelenkt, als
70
auch um bѲ = 20° gegen die optische Achse in die xz-Ebene verkippt ist. Der Zylinder ist
nicht in y-Richtung ausgelenkt. Die betrachteten Auslenkungen in x-Richtung sind bx
= -0.1 µm, 0 und 0.1 µm. In allen drei Fällen liegt eine Modulation in kx-Richtung vor.
Die Projektionen der Intensitätsverteilungen auf die kx-Achse sind dargestellt.
a)
e)
Parameter bx
- 0.1µm
0.1µm
0
0.05
z
0.00
x
-0.05
-0.5
kx
0.0
0
0.5k
-10
d)
0.5
5
0
-5
0.0_0.0_2.0_0_20
bx
=0
-0.5k
Idiff(kx,ky)
ky
0.0
0.5
-0.5
ky
0.0
Idiff(kx,ky)
2
0
kx
0.0
-0.5
10
bx = - 0.1µm
-0.5k
Idiff(kx,ky)
0.5
-2
0.5k
c)
0.5
-0.5
ky
0.0
kx
0.0
-0.5k
0.0
0.5k
b)
kxc
by =Ikx_1_2_4_0_20
0, bz = 0.2µm,
Ikx_2_2_4_0_20
bθ =Ikx_3_2_4_0_20
20°, bφ = 0
-0.10
bx1.0_0.0_2.0_0_20
= 0.1µm
Abb. 5.10 Kopplung des Sx Signals mit einer Winkelauslenkung des Zylinder in die xzEbene bei zusätzlicher axialer Auslenkung. a) Skizze des Zylinders im Fokus mit
angedeuteter Intensitätsverteilung des Fokus. b,c,d) Differenzintensitätsverteilungen
aobc , bp , q mit Raumlage des Zylinders 1c , 0,0.2μ+, 20°, 03 für drei unterschiedliche
Auslenkungen c . e) dazugehörige Projektionen a1bc 3. Der mit Schwellwertverfahren
berechnete Schwerpunkt bc und die Grenzen der lokalen QPD sind eingezeichnet.
Die Differenzintensitätsverteilung für einen Zylinder, der ausschließlich axial ausgelenkt
und in die xz-Ebene verkippt ist (Abb. 5.10c) zeigt eine Modulation in kx-Richtung, wie
sie sonst typisch für eine Auslenkung des Zylinders in -x-Richtung ist (Abb. 5.10b). Das
Sx Signal gibt eine vermeintliche Auslenkung in -x-Richtung an. Dies lässt sich
geometrisch erklären. Gewichtet man den Zylinder mit der Intensitätsverteilung im
Fokus, wie in Abb. 5.10a, bleibt im Wesentlichen ein Streuer übrig, dessen Schwerpunkt
in -x-Richtung ausgelenkt ist. Ist der Zylinder zusätzlich in -x-Richtung ausgelenkt, so
überlagert die daraus resultierende kx-Intensitätsmodulation in der BFP mit der kxIntensitätsmodulation durch die axiale Auslenkung des Zylinders und dessen
Winkelauslenkung in die xy-Ebene. Die gesamte daraus resultierende kxIntensitätsmodulation ist verstärkt. Die Überlagerung ist entsprechend einer Auslenkung
in –x- bzw. +x-Richtung konstruktiv bzw. destruktiv, wie es in Abb. 5.10e anhand von
Projektionen ayy 1bc , 3 zu erkennen ist. Es kann festgestellt werden, dass die
Differenzintensitätsverteilungen unterschiedlicher Raumlagen, wie etwa die in Abb. 5.10c
und d, sehr ähnlich sein können, was eine Signalauswertung, die orthogonale Signale
71
5 Tracking von Nanorods
liefern soll, sehr schwierig macht. Insbesondere, ist zu bedenken, dass unter
experimentellen Bedingungen noch Abweichungen vorhanden sein können.
Abb. 5.11 zeigt Differenzintensitätsverteilungen ayy obc , bp , q dreier Zylinder mit
unterschiedlichen Aspektverhältnissen a = L/D = 1; 4; 8 bei gleicher Raumlage
b = (0.1µm, 0, 0, 30°, 165°) und einem festen Zylinderdurchmesser D = 0.1µm. Aus
einem Vergleich der Bilder lassen sich zwei Zusammenhänge erkennen. Erstens, der
kreisförmige Bereich innerhalb des Detektionsbereichs auf den sich die
Intensitätsmodulation (im Folgenden Modulationsfläche MF genannt) konzentriert, ist am
kleinsten für den Zylinder mit dem größtem Aspektverhältnis a = 8. Die Größe der MF
nimmt mit kleinerem Aspektverhältnis zu. Für ein Aspektverhältnis von a = 1 erstreckt
sich die Intensitätsmodulation über den gesamten Detektionsbereich. Zweitens, der
Bereich der Intensitätsmodulation ist am stärksten vom Zentrum der kx-ky Ebene
ausgelenkt für den Zylinder mit a = 8. Die Auslenkung nimmt ab mit kleinerem
Aspektverhältnis.
Abb. 5.11 Einfluss des Zylinder Aspektverhältnisses auf die Differenzintensitätsverteilung
in der BFPDL. a=L/D=1, 4, 8
Beides kann damit erklärt werden, dass je kleiner das Aspektverhältnis eines Zylinders
ist, desto ähnlicher wird dessen Geometrie derjenigen einer Kugel und desto weniger
stark ist in Folge der Einfluss einer Orientierung. Wie weiter oben festgestellt, ist die
Auslenkung der MF durch den Polarwinkel des Zylinders beeinflusst.
Weiterhin wurde festgestellt (ohne Abb.), dass der Radius der MF deutlich wächst mit
kleinerem Zylinderdurchmesser. Beispielsweise ist der Radius der MF eines Zylinders
mit D=0.1µm und Aspektverhältnis a = 4, wie in Abb. 5.11b, etwa so groß wie der eines
Zylinders mit D = 0.02 µm und a = 20.
Die festgestellten Auswirkungen unterschiedlicher Raumlagen eines Nanorods im Fokus
auf die Intensitätsverteilung in der BFPDL können dazu verwendet werden Orientierungsund Positionsignale zu bestimmen, die das 5D Tracking eines Nanorods ermöglichen.
Im nächsten Abschnitt wird eine Methode zum Tracking eines Nanorods vorgestellt, die
auf der Annahme beruht, dass 1. die Auslenkung des Nanorods relativ zum Fokuszentrum
72
gegeben ist durch eine sinusförmige Modulation der Intensitätsverteilung und 2. die
Orientierung eines Nanorods gegeben ist durch einen Schwerpunkt der
Intensitätsmodulation, welcher proportional zu · versetzt und um ¸ gegen die kxRichtung rotiert ist.
5.1.3
Algorithmus zur Signalbestimmung
Mit dem Ziel die Auslenkungen und Winkelauslenkungen eines Nanorods aus linearen
und orthogonalen Signalen gemäß ∝ ~ berechnen zu können, wird in diesem
Abschnitt ein Algorithmus zur Signalbestimmung vorgeschlagen. Im Wesentlichen
beruht die neue Methode zur Bestimmung der fünf Signale Sx, Sy, Sz und SѲ und SФ auf
der Auswertung einer „lokalen QPD“, die im Folgenden eingeführt wird, siehe Abb. 5.12.
Die lokale QPD ist eine Kreisfläche mit Radius r innerhalb des Detektionsbereichs in der
BFPDL mit Radius R = k0 NADL und besteht aus vier Quadranten, die entsprechend der
Achsen des kxky-Koordinatensystems ausgerichtet sind. Die Fläche der lokalen QPD
deckt sich mit der, auf die sich die Modulation der Intensitätverteilung konzentriert. Das
Zentrum der lokalen QPD liegt im Schwerpunkt der betrachteten Intensitätsverteilung in
der BFPDL.
Der Algorithmus zur Signalbestimmung beinhaltet die folgenden sechs Schritte
-
Bilden der Differenzintensität durch Subtraktion der Intensität des leeren Fokus
Betrag nehmen
Schwellwertverfahren
Berechnen des Schwerpunkts kc = (kxc, kyc) der Intensitätsverteilung. Daraus
können die Orientierungssignale bestimmt werden.
Festlegen der lokalen QPD, durch Multiplikation mit einer Kreisblende, deren
Zentrum gleich der Schwerpunktposition kc ist.
Bestimmen der Positionssignale, aus der Intensitätsverteilung auf der lokalen
QPD.
Abb. 5.12 Signalbestimmung mit lokaler QPD. a) berechnete Differenzintensität in BFPDL
vs. kx und ky für einen Zylinder mit Länge L = 0.8 µm, Durchmesser D = 0.1 µm und
Raumlagevektor b = (0.1 µm, 0, 0, 165 °, 30 °). b) Schema zur Auswertung der BFPIntensitätsverteilung mit lokaler QPD am Ort des Schwerpunkts (kxc,kyc) der
Intensitätsverteilung, Aperturradien r und rz.
73
5 Tracking von Nanorods
Um die Position der lokalen QPD zu bestimmen, wird der Schwerpunktvektor obc , bp q der BFP-Intensitätsverteilung berechnet. Eine genaue Beschreibung findet sich
im Anhang, s. 8.7.
Aus dem berechneten Schwerpunktvektor in der kxky-Ebene können die
Orientierungssignale extrahiert werden.
~· obc , bp q
(5.16)
~¸ ∢1 , rc 3 K
] ∙ rc /| |`
(5.17)
Das ~· Signal bezüglich des Polarwinkels · des Nanorods im Fokus ist gleich dem
Betrag des Schwerpunktvektors . Das ~¸ Signal bezüglich des Azimutwinkels ¸ ist
direkt der Winkel zwischen dem Schwerpunktvektor und dem Einheitsvektor rc 11,03 in kx-Richtung.
Die Positionssignale ~$ 13, mit m = x, y, z werden berechnet durch Integration der BFPIntensitätsverteilung über Flächen, welche durch Filterfunktionen [n$ obc , bp q festgelegt
sind.
~$ 13 aobc , bp , q [n$ obc , bp qIbc Ibp
(5.18)
Diese Filterfunktionen [n$ obc , bp q lauten
} obc , bp , K, bc , bp q]1 2Θ1bc , bc 3`
[nc obc , bp q
(5.19)
} obc , bp , K, bc , bp qh1 2Θobp , bp qi
[np obc , bp q
(5.20)
} obc , bp , K , bc , bp q
[n obc , bp q
(5.21)
} obc , bp , K, bc , bp q eine spatiale Filterfunktion definiert, die physikalisch eine
wobei
Kreisblende mit Radius r und Mittelpunkt obc , bp q in der BFP beschreibt,
gewissermaßen eine circ-Funktion.
} obc , bp , K, bc , bp q 1, 1bc bc 3% obp bp q ® K
0,
6
%
(5.22)
Mit Hilfe der 1D Stufenfunktion
1, bc bc
Θ1bc , bc 3 ?
0,
6
(5.23)
kann letztlich eine linke und rechte bzw. obere und unter Hälfte der lokalen QPD
selektiert werden für das ~c bzw. ~p Signal.
74
Die Aperturradien für die laterale und axiale Positionsbestimmung sind unterschiedlich.
Typischerweise ist K Ý K.
Somit werden die Positionssignale eines Nanorods aus Differenzsignalen für die lateralen
Richtungen und einem Summensignal für die axiale Richtung extrahiert, wie solche eines
Beads. Jedoch wird hier eine lokale QPD verwendet, deren Position die Information der
Zylinderorientierung enthält. Darüber hinaus ist der Radius K ≡ K1, 3 der Apertur der
lokalen QPD abhängig von erstens dem Aspektverhältnis a = L/D des Zylinders und
zweitens von dem Durchmesser D des Zylinders. Um aus den Signalen schließlich
(Winkel-)Auslenkungen ~ / mit f _, l, , , ¼ berechnen zu können, müssen
Kalibrationskonstanten bestimmt werden.
Fazit
Dieses verallgemeinerte Verfahren kann prinzipiell sowohl zum Tracking für Beads, als
auch für Partikel mit zylindrischer Geometrie, wie etwa Nanorods, Ellipsoide oder
stäbchenförmige Bakterien, angewendet werden.
75
5 Tracking von Nanorods
5.1.4
Ergebnisse
In diesem Abschnitt werden die berechneten Positions- und Orientierungssignale
überblicksweise dargestellt und beschrieben. Es sei daran erinnert, dass jedes der fünf
Signale eine Funktion von fünf Variablen ist und aus einer 2D Intensitätsverteilung
extrahiert wird. Nachdem sich fünf dimensionale Abhängigkeiten schwer darstellen
lassen und für den betrachteten Parameterraum eine große Anzahl an Kombinationen
vorliegt, mussten einzelne Exempel ausgewählt werden, um wichtige Zusammenhänge
aufzuzeigen. Insbesondere sind orthogonale Signalfunktionen erwünscht, also solche die
nur von einer Koordinate abhängen und unabhängig von allen anderen sind. Durch die
systematische Selektion lassen sich folgende Fragen beantworten:
Wie verhält sich die Orthogonalität und Linearität bzw. welche Zusammenhänge bestehen
bei
-
lateralen und axialen Positionssignalen bei reiner Translation (keine
Winkelauslenkung des Zylinders)?
Orientierungssignalen bei reiner Winkelauslenkung (keine Translation des
Zylinders)?
lateralen Positionssignalen und Polarwinkelsignalen für laterale Translationen
und Winkelauslenkungen gegen die optische Achse für einen Zylinder, mit und
ohne axialer Auslenkung vom Fokuszentrum?
axialen Positionssignalen und Polarwinkelsignalen für axiale Translationen und
Winkelauslenkungen gegen die optische Achse für einen Zylinder, mit und ohne
lateraler Auslenkung vom Fokuszentrum?
lateralen Positionssignalen und Azimutwinkelsignalen für laterale Translationen
vom azimutalen Winkelauslenkungen des Zylinders, mit und ohne axialer
Auslenkung vom Fokuszentrum?
axialen Positionssignalen und Azimutwinkelsignalen für axiale Translationen
von azimutalen Winkelauslenkungen des Zylinders, mit und ohne lateraler
Auslenkung vom Fokuszentrum?
lateralen und axialen Positionssignalen für laterale und axiale Translationen bei
unterschiedlichen Polarwinkeln?
lateralen Positionssignalen für laterale und axiale Translationen bei
unterschiedlichen Azimutwinkeln und festem Polarwinkel?
In Abb. 5.13a sind die Positionssignale ~_ und ~ in Form von Isolinien als Funktion der
Zylinderposition in der xy-Ebene mit by=0 dargestellt. Der Zylinder ist entlang der
optischen
Achse
ausgerichtet.
Die
graue
Einfärbung
markiert
die
Aufenthaltswahrscheinlichkeitsdichte im Fangvolumen. Die Positionssignale ~_ und ~
sind innerhalb des Fangvolumens in guter Näherung linear und orthogonal.
In Abb. 5.13b sind die Orientierungssignale SѲ und SФ als Funktion der
Winkelauslenkungen gezeigt. Der Zylinderschwerpunkt befindet sich im Fokuszentrum.
Die Orientierungssignale sind innerhalb des Fangvolumens in guter Näherung linear und
orthogonal.
76
a)
b)
bxX
0.4
15
SФ(bФ,bѲ)
SѲ(bФ,bѲ)
80
80 °
70
60
60
50
40
40
30
20
20
0
10
1
theta
20
10 15 20 25 30 °
0.0
z
0.2
bθ
10
0.6µm
bphiФ
Sx(bx,bz)
Sz(bx,bz)
@ by = bФ = bθ = 0
5
bZ
0
0.2
0.5
0.0
-1
-0.5
-0.2µm
6
5
4
3
@ bt = 0
Abb. 5.13 Positions- und Orientierungssignale von Zylinder in Fokus. Eine
Aufenthaltswahrscheinlichkeitsdichteverteilung ist farbkodiert in Grauwerten. a) Isolinien
(in a.u.) des ~c 1c , 3 und ~ 1c , 3 Signals eines Zylinder, der nicht in y-Richtung
ausgelenkt ist und dessen lange Achse parallel zur optischen Achse steht. b) Isolinien des
~· o· , ¸ q und ~¸ o· , ¸ q Signals eines Zylinders, mit Schwerpunkt im Fokuszentrum. Die
Darstellung beginnt mit dem kleinsten berechneten Auslenkwinkel · = 10°, da für · =0
kein Azimutwinkel ¸ definiert.
In Abb. 5.14a,b sind die lateralen Positionssignale ~_ o, _ q und Polarwinkelsignale
~ o , _ q gezeigt. Der Zylinder ist nicht in y-Richtung ausgelenkt. Der Azimutwinkel ist
null. Ohne axiale Zylinderauslenkung fächern die für kleine Polarwinkel horizontalen ~_
Isolinien mit größer werdenden Polarwinkeln auseinander. Mit axialer Auslenkung
( =0.2µm) sind die ~_ Isolinien zudem geneigt. Die SѲ Isolinien sind ohne und mit
axialer Zylinderauslenkung im Wesentlichen vertikal, aber durch die x-Position des
Zylinders beeinflusst.
In Abb. 5.14c,d sind die axialen Positionssignale ~o, q und Polarwinkelsignale
~ o , q gezeigt. Der Zylinder ist nicht in y-Richtung ausgelenkt. Der Azimutwinkel ist
null. Die ~ und ~ Isolinien bilden ohne und mit lateraler Zylinderauslenkung ein
annähernd rechtwinkliges Gitter, welches aber unregelmäßig gestört ist.
77
5 Tracking von Nanorods
a)
b)
bbθθ
-1
bx
bx
@ by = bФ = 0
1
0
@ bz = 0.2µm
d)
20
30 °
bbθθ
6
10
0
4
10
15
6
bz
bz
0.2
0.2
0.4
0.6 µm
6
4
2
Sθ(b θ, bz)
Sz(b θ, bz)
@ by = bФ = 0
0.6 µm
0.4
bz
10
@ bx = 0
30 °
5
5
bz
20
0
0.0
0.0
0
2
10
-0.2
-0.2
bbθθ
0
-1
30 °
0.5
@ bz = 0
c)
20
-0.5
0.2 µm 0.1
bx
0.0
0
0.5
0.2 µm 0.1
bx
10
2
6
2
Sx(bθ, bx)
Sθ(bθ, bx)
0
6
30 °
4
20
-0.1 -0.2
10
0.0
0
4
-0.1 -0.2
bbθθ
20
@ bx = 0.1µm
Abb. 5.14 Kopplung des ~c bzw. ~ und des ~· Signals mit Ortsauslenkung und axialer
Winkelauslenkung. a, b) Isolinien (in a.u.) der Positions- und Orientierungssignale
~_ 1 , _ 3 und ~ 1 , _ 3 ohne und mit axialer Auslenkung. c, d) Isolinien (in a.u.) der
Positions- und Orientierungssignale ~ 1· , 3 und ~· 1· , 3 ohne und mit lateraler
Auslenkung.
In Abb. 5.15a,b sind die lateralen Positionssignale ~c o¸ , c q und Azimutwinkelsignale
~¸ o¸ , c q gezeigt. Der Zylinder ist nicht in y-Richtung ausgelenkt. Der Polarwinkel ist
· =20°. Ohne axiale Zylinderauslenkung sind die ~c Signale in guter Näherung
orthogonal und linear. Mit axialer Auslenkung ( =0.2µm) neigen sich die ~c Isolinien
gegen die Horizontale. Die ~¸ Isolinien sind ohne und mit axialer Zylinderauslenkung im
Wesentlichen vertikal, aber durch die x-Position des Zylinders beeinflusst.
In Abb. 5.15c,d sind die axialen Positionssignale ~ o¸ , q und Azimutwinkelsignale
~¸ o¸ , q gezeigt. Der Zylinder ist nicht in y-Richtung ausgelenkt. Der Polarwinkel ist
· =20°. Ohne laterale und bei kleiner axialer Zylinderauslenkung ist ~ in guter
Näherung konstant unter Änderung des Azimutwinkels. Dies gilt nicht mehr für größere
axiale Auslenkungen und in Kombination mit einer lateralen Auslenkung.
Die SФ Signale sind in guter Näherung linear und orthogonal ohne laterale
Zylinderauslenkung. Mit lateraler Auslenkung (c =0.1µm) sind die ~¸ Isolinien im
Wesentlichen noch vertikal, aber durch die z-Position des Zylinders deutlich beeinflusst.
78
1
SФ(bФ, bz)
Sz(bФ, bz)
60
80 °
d)
0
20
40
20
10
0.6 µm
60
15
0.4
60
50
0.6 µm
@ bx = 0
70
60
10
20
40
bz
0.2
bz
40
80
70
30
20
10
0.4
15
20
50
50
0.0
0.0
bz
0.2
10
80 °
5
5
bz
60
0
30
0
bφ
bФ
80
40
70
20
30
0
@ by = 0, bѲ = 20°
-0.2
-0.2
0
-1
-0.5
80 °
@ bz = 0.2µm
bφ
c)
60
0.5
@ bz = 0
bФ
40
80
bx
20
80
30
20
70
60
0.2 µm 0.1
bx
20
0.2 µm 0.1
50
0
0.5
0
40
0.0
10
-1
-0.5
bbφФ
b)
80 °
10
60
-0.1 -0.2
40
90
-0.1 -0.2
20
40
bx
0
@ by = 0, bѲ = 20°
0.0
bφbФ
a)
bx
Sx(bФ, bx)
SФ(bФ, bx)
@ bx = 0.1µm
Abb. 5.15 Kopplung des ~c bzw. ~ und des ~¸ Signals mit Ortsauslenkung und lateraler
Winkelauslenkung. a, b) Isolinien (in a.u.) der Positions- und Orientierungssignale
~c o¸ , c q und ~¸ o¸ , c q ohne und mit axialer Auslenkung. c, d) Isolinien (in a.u.) der
Positions- und Orientierungssignale ~ o¸ , q und ~¸ o¸ , q ohne und mit lateraler
Auslenkung.
Abb. 5.16 zeigt ~_ o_ , q und ~o_, q Signale in Abhängigkeit der Zylinderposition in
der xz-Ebene für verschiedene Polarwinkel · . Der Zylinder ist nicht in y-Richtung
ausgelenkt. Der Azimutwinkel ist null. Die ~_ Isolinien sind jeweils in allen drei Fällen
geneigt. Der Neigungswinkel nimmt mit steigendem Polarwinkel zu. Näherungsweise
lässt sich dieser Zusammenhang der Kopplung des ~ Signals beschreiben mit
~c ~ f1
· · 3, wobei 1 Ý · Ý 2. Die ~ Isolinien für einen Polarwinkel von · =10°
sind gekrümmt, für größere Polarwinkel sind sie deutlich gegen die Horizontale geneigt.
79
5 Tracking von Nanorods
a)
b)
c)
bx
0.2
-0.2µm
0.0
0.2
0
0
5
-0.
0.0
-0.2µm
0.2
0.5
0
-1
0.0
bxx
0.0
-5
1
0.5
-1
0
0.0
0.0
-0.2µm
bx
Sx(bx,bz)
Sz(bx,bz)
@ b y = bФ = 0
0
15
0.6µm
0.6µm
5
-0.
@ bθ = 10°
0.4
0.4
0.4
10
20
5
5
-1.
15
bz
5
10
15
0.6µm
bz
z
0.2
z
0.2
10
z
0.2
-1
bz
@ bθ = 20°
@ bθ = 30°
Abb. 5.16 Kopplung des ~c und des ~ Signals mit Ortsauslenkung bei axialer
Winkelauslenkung. Isolinien (in a.u.) des ~c 1c , 3 und ~ 1c , 3 Signals für
unterschiedliche Auslenkwinkel · . Eine Aufenthaltswahrscheinlichkeitsdichteverteilung
eoc , p qe1· 3 ist farbkodiert in Grauwerten.
In Abb. 5.17 sind Isolinien ~c 1c , 3=0 für unterschiedliche Azimutwinkel ¸
dargestellt. Der Zylinder ist nicht in y-Richtung ausgelenkt. Der Polarwinkel ist · =20°.
Für den Azimutwinkel ¸ =90°, der Zylinder ist in die yz-Ebene verkippt, ist die ~c
Isolinie vertikal. Für kleinere Azimutwinkel sind die Isolinien gegen die Vertikale
geneigt, wobei der Neigungswinkel für kleinere Azimutwinkel größer wird. Für ¸ =0°,
der Zylinder ist in die xz-Ebene verkippt, ist die ~_ Isolinie maximal geneigt. Alle ~_
Isolinien schneiden sich in c = =0. Diese Abhängigkeit des ~c Signals lässt sich
näherungsweise beschreiben, als ~c ~ f1 3 mit Neigungswinkel ¸ o90° ¸ q, wobei 0.23 Ý ¸ Ý 0.3.
-0.2µm
bx x
0.0
0.2
@ by = 0, bѲ = 20°
z
0.2
0.0
Sx(bx,bz) = 0
0.6µm
0.4
bz
Parameter bФ
90°
60°
45°
30°
0°
Abb. 5.17 Kopplung des ~c Signals mit Ortsauslenkung und azimutaler Winkelauslenkung.
Isolinien der Positionssignale ~c 1c , 3 eines Zylinder, der um =20° gegen die optische
Achse verkippt ist, mit Parameter ¼ .
Die Ergebnisse der Signalauswertung zeigen, dass sich die Orientierung eines Zylinders
tracken lässt. Die Orientierungssignale sind für einen Zylinder mit Schwerpunkt im
Fokuszentrum in guter Näherung linear und orthogonal. Ein Mindestfehler Δ· der
axialen Winkelauslenkung lässt sich abschätzen aus der projizierten Breite den eine ~·
80
Isolinie einnimmt, wenn über · aufgetragen ist. So erhält man aus Abb. 5.13b etwa ein
Δ· = ±0.5° für ¸ = 0…90° und =0. Ebenso ergibt sich ein Fehler Δ¸ = ±1° für · =
10…30°. Für einen ausgelenkten Zylinder hingegen sind die Orientierungssignale von der
Position
beeinflusst.
Es
ergibt
sich
ein
positionsabhängiger
Fehler.
Größenordnungsmäßig lässt sich ein Fehler von etwa Δ· = ±3° ablesen, betrachtet man
etwa exemplarisch die Isolinie ~· 1· , 3=2 in Abb. 5.14c. Bei der Bestimmung des
Azimutwinkels ist der Fehler davon abhängig, ob neben einer axialen eine laterale
Ortsauslenkung vorliegt. Gegenüber axialer Auslenkung ohne laterale Auslenkung ist der
Fehler Δ¸ = ±1° für · =20°. Hingegen ist Δ¸ = ±4°, falls c =0.1µm, vgl. Abb. 5.15c,d.
Die Positionssignale sind für einen Zylinder, der parallel zur optischen Achse
ausgerichtet ist und bis zu einer axialen Auslenkung von etwa 0.4µm in guter Näherung
linear und orthogonal. Hier liegt die Fehlerbreite lateral und axial etwa bei Δc =±5nm
und Δ =±10nm. Für noch größere axiale Auslenkungen in Strahlausbreitungsrichtung
steigt die Fehlerbreite stark auf Δc =±12nm und Δ =±50nm an. Ohne axiale
Auslenkung ist die Kopplung der lateralen Positionssignale bzgl. einer kleinen
Winkelauslenkung · <15° gegen die optische Achse gering. Kommt eine axiale
Auslenkung des Zylinders hinzu, so liegt eine starke Kopplung bzgl. · vor. Ebenso ist
die Kopplung der lateralen Positionssignale mit dem Azimutwinkel klein ohne axiale
Auslenkung und stark in Kombination mit axialer Auslenkung. Des Weiteren sind die
lateralen Positionssignale gegenüber einer axialen Auslenkung in Kombination mit einer
Winkelauslenkung gegen die optische Achse gekoppelt. Die Kopplungstärke wächst mit
zunehmenden · . Das axiale Positionssignal für einen Zylinder, der gegen die optische
Achse verkippt ist, ist gekoppelt bzgl. der Winkelauslenkungen. Die Kopplung bzgl. der
lateralen Auslenkung wächst mit zunehmendem Winkel gegen die optische Achse.
5.1.5
Diskussion und Ausblick
Die bisherige BFP Interferometrie mit drei Positionssignalen einer bzw. zweier
Quadrantenphotodioden oder eines positionsempfindlichen Sensors zur Bestimmung
einer Ortsauslenkung wurde sowohl zum Tracken von Beads, als auch in ganz
neuerlichen Studien von Nanorods, verwendet. Wie bereits Kress et al. [136] zeigen
konnten werden die Positionssignale jedoch durch eine Winkelauslenkung eines
zylindrischen Partikels beeinflusst und es ergeben sich Fehler bei der Bestimmung von
Translationen. Die von der Orientierung abhängigen Kopplungen der Positionssignale
wurden entweder vernachlässigt [30, 76, 107, 141] oder in einer Weise berücksichtigt, um
durch Korrelationsanalysen quantitativ Rotationen und Drehmomente zu bestimmen [84,
138, 139]. In keiner der Studien hingegen konnten Polar- und Azimutwinkel als vierte
und fünfte Koordinaten zeitlich aufgelöst bestimmt werden. Nur außerhalb von
Experimenten mit optischen Pinzetten ist eine Bestimmung der 5D Raumlage bekannt,
welche aber auf holographischer Videomikroskopie basiert und damit in ihrer zeitlichen
Auflösung beschränkt ist [131, 132]. Die vorgestellte, neue, verallgemeinerte Methode
der BFP Interferometrie kann zur Positionsbestimmung sphärischer Partikel verwendet
werden und liefert zudem die erweiterte Möglichkeit beides die Position und die
Orientierung von zylindrischen Partikeln zu tracken. Jedoch sind weiterhin eine
Kombination von Orts- und Winkelauslenkung problematisch und wirken sich in einer
Kopplung der Raumlagesignale aus, was zu Fehlern bei der Bestimmung der Raumlage
führt. Prinzipiell wächst der Fehler mit der Winkelauslenkung · der langen
Zylinderachse zur optischen Achse, und in Kombination mit einer Auslenkung in zRichtung. Vorteilhafterweise wirkt gegenüber einer solchen Winkelauslenkung ein
81
5 Tracking von Nanorods
Rückstellmoment [39] durch die optischen Kräfte in der Falle, was große
Winkelauslenkungen weniger wahrscheinlich macht. Jedoch gibt es hier ein stark von den
Dimensionen des Zylinders abhängiges Verhalten [93, 96]. Weiterhin können Fehler in
Abhängigkeit der Orientierung angegeben werden. Die typischerweise aufgrund des
Strahlungsdrucks vorliegende Fangposition in z0>0 könnte im Experiment etwa mit
einem zur optischen Falle gegenläufigen zweiten Laserstrahl kompensiert werden. Das
Verfahren ist insbesondere geeignet für zylindrische Partikel mit hohem
Aspektverhältnis, bei denen der Einfluss einer Orientierung auf das Streuverhalten groß
ist. In Anlehnung an die Auswertung der berechneten Intensitätsverteilungen in Arrays
von nur 33 Pixeln Kantenlänge, kann für eine experimentelle Umsetzung mit dem
Bestreben hoher zeitlicher Auflösung beim Tracking ein Detektor in Form eines 32x32
Pixel Arrays vorgeschlagen werden. Im Unterschied zur Videomikroskopie ist keine
große Pixelzahl notwendig. Beispielsweise könnte ein eingeschränkter Pixelbereich
(region of interest) einer gewöhnlichen Kamera verwendet werden und/oder
zusammenhängende Pixel im Verbund ausgelesen werden (binning). Alternativ und
insbesondere interessant bei NIR Laseranwendung sind InGaAs Sensoren, welche eine
höhere Sensitivität in diesem Wellenlängenbereich als Siliziumsensoren haben. 64x64
Pixel InGaAs Sensoren der Firma Hamamatsu sind am Markt erhältlich.
Die Kombination von optischen Fallen und einer 5D-Trackingmethode ist insbesondere
sehr interessant für die Nanotechnologie. Prinzipiell ist es möglich eine drei dimensionale
funktionelle Nanostruktur Baustein für Baustein („bottom-up approach“) mit optischen
Fallen aufzubauen, wie in Kapitel 4 gezeigt wurde. Jedoch werden die einzelnen
Bausteine aufgrund des Größenregimes von Brownscher Dynamik beherrscht und
fluktuieren in allen Freiheitsgraden. Dabei ist es unabdingbar die Position und die
Orientierung eines nanoskaligen Bauteils in dem Moment zu kennen, in dem es mit hoher
Präzision mit anderen zusammen geführt und zu einem funktionellen System aufgebaut
werden soll. Ganz ebenso, wie es in unserer makroskopischen Welt nötig ist einen Faden
zu sehen, der mit zittriger Hand in ein Nadelöhr geführt werden soll.
Im Übrigen müssen die Signale, welche a priori nicht in Grad und Nanometern vorliegen
noch kalibriert werden. Dieser Problematik wird sich im nächsten Abschnitt zugewendet.
82
5.2 Kalibration
Die Fallen- und Detektorkalibration für ein asphärisches Partikel in einer optischen Falle,
wie etwa eines Nanorods, ist deutlich komplexer gegenüber der eines Beads und bedarf
einiger zusätzlicher Überlegungen.
Bei dem standard Kalibrationsverfahren [32] für ein Objekt in einer optischen Falle (siehe
Abschnitt 2.5) mit Gleichverteilungssatz und Langevin-Methode werden Annahmen
getroffen.
1. Die Bewegung des Teilchens in der optischen Falle sei in all ihren
Freiheitsgraden voneinander unabhängig. Das schließt insbesondere auch eine
Kopplung von Translation und Rotation aus.
2. Auf das Teilchen in der optischen Falle wirke für jede Auslenkung bzw.
Winkelauslenkung von der Gleichgewichtslage eine lineare Rückstellkraft bzw.
ein lineares Drehmoment. Dies entspricht einer Diffusion im harmonischen
Potential §1_3 _ % /2 für jede Koordinate _ .
Diese Annahmen können für asphärische Objekte durchaus unzutreffend sein. Im
Allgemeinen koppeln Translationen und Rotationen. Die generalisierte 6D LangevinBewegungsgleichung lässt sich nach Simpson et al. [20] für einen Zylinder in der
optischen Falle in vier unabhängige Gleichungssysteme zerlegen. Die ersten zwei
beschreiben die gekoppelte Bewegung x-Translation und y-Rotation, sowie y-Translation
und x-Rotation. Die dritte beschreibt die ungekoppelte Bewegung in z-Richtung. Die
vierte die Rotation um die Zylinderachse.
Des Weiteren werden standardmäßig lineare und orthogonale Signale angenommen. Für
asphärische Partikel werden mit Annahme der Signalorthogonalität sämtliche
Kopplungen der Signale ignoriert, bzw. für den Fall eines zylindrischen Partikels die
' vernachlässigt.
Nebendiagonalelemente der 5x5 Kalibrationsmatrix
~c
~c
cc
~p
~p
# & #
& #
" ~ % " ~ % "
~·
~·
!~¸ $ !~ ¸ $ !
pp
··
c
p
&# &
% " %
·
¸¸ $
! ¸$
(5.24)
Die Detektorkalibration kann alternativ durch einen Kalibrationsscan (siehe Abschnitt
2.5.1) durchgeführt werden. Das ist jedoch für Nanorods aus mehreren Gründen
schwierig
a) oft sind keine identischen Nanorods vorhanden oder
b) ein Fixieren würde die eigentliche Messung vereiteln, weil ein anschließendes
Lösen nicht möglich ist.
c) ein Kalibrationsscan nach der Messung ist riskant, da das Teilchen verloren
gehen kann.
83
5 Tracking von Nanorods
d) Für einen Kalibrationsscan der alle Orientierungen mit einschließt, muss das
fixierte Testobjekt gedreht werden, was mit dem vorhandenen Probenhalter nicht
gezielt möglich war.
e) Eine Vielzahl von Kalibrationsscans von etwa in Gel fixierten Nanorods müsste
durchgeführt werden, um unterschiedlichen Raumorientierungen Rechnung zu
tragen (z. B. 10x10, wenn der Polar- und Azimutwinkel je in Abständen von 10°
für einen Bereich von jeweils 0 bis 90 ° abgetastet werden soll). Zudem ist die
tatsächlich vorliegende Orientierung im Allgemeinen unbekannt.
In Abschnitt 5.3 wird die Bestimmung der Orientierung eines statischen Nanorods
geschildert.
Für den Fall, dass Winkelauslenkungen vernachlässigbar sind kann eine Kalibration nach
Greanleaf et al. [142] mit zwei Lasern unterschiedlicher Wellenlänge eine Lösung sein.
Mit einem ersten Laser kann die Probe gefangen und bei bekannter Auslenkung durch
einen zweiten statischen Laser gescannt werden.
Reece et al. [30] berichteten von einer neuen „fast switching“ Methode zur Detektor
Kalibration, welche nur einen Laser benötigt. Diese Methode wurde nur für die xy-Ebene
angewandt, könnte aber prinzipiell auf 3D erweitert werden. Dabei wurde ein gefangenes
Nanorod mit einem AOD um eine bekannte Auslenkung versetzt. Der Laser sprang
schnell und für kurze Zeit in die Ausgangslage zurück. Alsbald wurde das Positionssignal
eines positions-empfindlichen Sensors (PSD) detektiert. Die Synchronisation des PSD
und der AODs wurde über eine FPGA (field programmable gate array) Karte
sichergestellt. Aus einem statistischen Mittel von 2000 Wiederholungen konnte das
Signal kalibriert werden. Das Verfahren wurde für verschiedene Auslenkungen in die xund y-Richtung durchgeführt. Es wurde eine konstante Orientierung angenommen. Der
Einfluss der Orientierung eines Nanorods müsste jedoch für solche mit größeren
Aspektverhältnissen stärker sein. Die Rate, mit welcher der Laser versetzt wird, muss
deutlich höher sein, als die Diffusionsrate des Objekts, wenn der Laser zurückgesetzt
wird. Die Verfahrzeit wurde mit 25µs angegeben. Eine mittlere Auslenkung (2Dt)1/2 von
3.2nm für einen Nanodraht mit L=10µm und D=30nm wurde abgeschätzt. Durch die
Statistik ist der Fehler geringer, jedoch aber durch die festgelegte Richtung beim
Zurücksetzen ungleich Null.
84
5.3 Bestimmung einer statischen Orientierung
Es wurden zwei Methoden herausgefunden, mit welchen die Orientierung eines fixierten
Nanorods bestimmt werden kann. Dies kann nützlich sein, um etwa Kalibrationsscans
eines fixierten Nanorods bei bekannter Raumorientierung durchzuführen. Beide
Methoden werden im Folgenden anhand von experimentellen Daten erläutert.
Bei der ersten Methode wird unter Hellfeldbeleuchtung ein Bilderstapel eines Nanorods
aufgenommen. Dazu wird das Nanorod für jedes Bild um eine feste Distanz dz in axialer
Richtung verfahren. Es bietet sich an dz entsprechend der abgebildeten Pixelgröße des
Kamerasensors zu wählen, um kubische Voxel zu erhalten. Abb. 5.18 zeigt eine
Bildabfolge eines fixierten Nanorods in unterschiedlichen axialen Ebenen. Wie der
Bildabfolge zu entnehmen ist, war das Nanorod etwa in x-Richtung orientiert und gegen
die Bildebene geneigt. Das Ende, welches in Beleuchtungsrichtung unterhalb der
Fokusebene lag erschien hell, das andere Ende hingegen dunkel.
Abb. 5.18 Mikroskopbilder eines Nanorods, welches gegen die Bildebene geneigt ist. Die
Bilder wurden in unterschiedlichen axialen Ebenen mit einem Abstand von dz=0.6µm
aufgenommen. Scalebar 2µm.
Aus einem solchen Bilderstapel kann eine 3D Intensitätsverteilung gewonnen werden.
Abb. 5.19 zeigt sowohl einen xz-, als auch einen yz-Schnitt der Intensitätsverteilung.
Diese entsprechen Schnittebenen, welche zum einen etwa parallel und zum anderen etwa
senkrecht durch das Nanorod verlaufen. Die Raumorientierung des Nanorods kann in der
Verteilung der maximalen Intensität wieder gefunden werden. Passt man den Schwellwert
der darzustellenden Intensitätswerte an, kann eine plastische Darstellung der
Raumorientierung des Nanorods erhalten werden (Abb. 5.19c). Aus dieser können der
Polar- und Azimutwinkel des Nanorods ausgemessen werden, wie in Abb. 5.19d,e
gezeigt.
85
5 Tracking von Nanorods
Abb. 5.19 3D Intensitätsverteilung von Bilderstapel eines Nanorods unter
Hellfeldbeleuchtung. a) xz-Schnitt. b) yz-Schnitt. c-e) Pseudo3D Darstellung der
Intensitätsverteilung. Der Polarwinkel · und der Azimutwinkel ¸ des Nanorods sind
eingezeichnet.
Abb. 5.20 3D Intensitätsverteilung von Bilderstapel eines Nanorods bei Beleuchtung mit
einem scannenden Laserfokus. a) xy-Schnittebenen mit lateraler Mäandertrajektorie des
Laserfokus. b) Mikroskopbilder des leuchtenden Nanorods, welches gegen die Bildebene
geneigt ist. Die Bilder wurden in unterschiedlichen axialen Ebenen mit einem Abstand von
dz=0.3µm aufgenommen. Der Azimutwinkel ¸ des Nanorods ist eingezeichnet Scalebar
2µm. c) Pseudo3D Darstellung der Intensitätsverteilung. Der Polarwinkel · des Nanorods
ist eingezeichnet.
Bei der zweiten Methode wird gegebenenfalls das Leuchten eines Nanorods ausgenutzt.
Speziell wurde hier ein ZnO Nanorod mit einem Laserfokus bei einer Wellenlänge von
86
λ0=1064nm angeregt. Aufgrund von Frequenzverdopplung emittierte das Nanorod
Photonen mit halber Wellenlänge, siehe Abschnitt 4.3.2. Es wurde ein Bilderstapel
aufgenommen, wobei der Laserfokus innerhalb der Belichtungszeit eines Kamerabildes
mäanderförmig eine Bildebene abrasterte, wie in Abb. 5.20 skizziert. Die Bilder wurden
in unterschiedlichen axialen Ebenen mit einer Distanz von dz=0.1µm aufgenommen.
Abb. 5.20b zeigt Bilder des leuchtenden ZnO Nanorods in unterschiedlichen axialen
Ebenen. Aus der 3D Intensitätverteilung lässt sich die Raumlage bestimmen, wie es in
Abb. 5.20c für den Polarwinkel des Nanorods gezeigt ist.
Ergebnis
Die Orientierung mit Polarwinkel · =42° und Azimutwinkel ¸ =2° eines etwa 4.5µm
langen ZnO Nanorods, welches gegen die Bildebene geneigt und in Agarosegel fixiert
war konnte mit Aufnahme eines Bilderstapels unter Hellfeldbeleuchtung bestimmt
werden.
Die Orientierung eines weiteren etwa 2.2µm langen leuchtenden Nanorods konnte
bestimmt werden. Das Nanorod wurde mit einem Laserfokus abgescannt und leuchtete
aufgrund von Frequenzverdopplung. Es wurde ein Polarwinkel von · =42° und ein
Azimutwinkel von ¸ =2 ermittelt.
Diskussion
Es wurden zwei Methoden zur Bestimmung einer statischen Orientierung eines Nanorods
gezeigt. Die Orientierung eines Nanorods aus einzelnen Mikroskopbildern ist schwierig
oder nur stark fehlerbehaftet zu bestimmen. Dies gilt insbesondere, wenn die Länge des
Nanorods nicht bekannt ist und für kleine Winkel des Nanorods zur optischen Achse. Bei
beiden Methoden wurden daher 3D Intensitätsverteilungen verwendet, die aus
Bilderstapeln generiert wurden. Die Methode 1 beruht auf Lichtstreuung. Eine
inhomogene oder schräge Beleuchtung kann daher problematisch sein. Im Gegensatz zur
Methode 2 muss die Probe nicht leuchten. Beide Methoden lassen eine Bestimmung der
Orientierung mit einer Genauigkeit von kleiner gleich einem Grad zu. Die zweite
Methode nutzt das Leuchten der Probe durch Frequenzverdoppelung, welche bei ZnO
Nanorods gegeben und auch für andere Materialien bekannt ist, siehe Abschnitt 4.3.2.
Insofern ist keine Fluoreszenzmarkierung nötig. Die Frequenzverdopplung verlangt
jedoch hohe Intensitäten. Alternativ könnten Nanorods auch unter geeigneter Anregung
durch Photolumineszenz zum Leuchten gebracht werden. ZnO Nanorods lumineszieren
unter UV Anregung [143]. Weiterhin ist etwa die Photolumineszenz von InP
Nanodrähten bekannt [141].
87
5 Tracking von Nanorods
5.4 Nanorod in einer Linienfalle
In Kapitel 4 wurde beschrieben, dass ein zylindrisches Partikel, wie etwa ein
stäbchenförmiges Bakterium oder ein Nanorod mit einer Linienfalle gefangen und
manipuliert werden kann. Ein solches richtet sich mit dessen langer Achse entlang der
Linienfalle aus und fluktuiert um die Gleichgewichtslage in allen Freiheitsgraden, siehe
Abb. 5.21.
Abb. 5.21 Fluktuierendes ZnO Nanorod in weicher Linienfalle. Das Nanorod nimmt
sichtbar unterschiedliche Orientierungen und Positionen ein. Bildrate 12f/s, Belichtungszeit
5ms. Scalebar 2.5µm.
In diesem Kapitel wird eine neu entwickelte Methode vorgestellt, mit der sich die
Raumlage, siehe Abb. 5.22, also die Orientierung und die Position eines Nanorods in
einer Linienfalle, aus den üblichen QPD Signalen (siehe Abschnitt 2.3) extrahieren lässt.
BFP Interferometrie Tracking von Beads in einer Linienfalle wurde bereits verwendet,
um den Abstand zweier Beads zu bestimmen [144] und von Speidel et al. [145] und
Tränkle et al. [146] zur Untersuchung hydrodynamischer Wechselwirkungen. Koch et al.
[147] konnten Konfigurationsänderungen eines Spiroplasma Bakteriums in einer
Linienfalle untersuchen.
Mit Hilfe dieses zeitlich hoch aufgelösten Trackings können unter gewissen Annahmen
zudem die Fallensteifigkeiten (engl. force and torque constants) für die fünf Dimensionen
des Nanorods bestimmt werden. Nanorods könnten somit als Sonde dienen, um Kräfte zu
messen, wie in einem photonischen Kraft-Mikroskop (engl. photonic force microscope,
PFM) [10]. Darüber hinaus können auch Drehmomente bestimmt werden, was insofern
eine Erweiterung darstellt.
Abb. 5.22 Schematische Darstellung eines Nanorods in einer Linienfalle. a) Nanorod
diffundiert im Potential einer Linienfalle der Länge len. Die X-Linienfalle entsteht durch
schnelles Oszillieren des Laserfokus entlang der x-Richtung. b) Raumlagekoordinaten des
Zylinders im Koordinatensystem mit Ursprung im Zentrum der Linienfalle, mit
Translationsvektor , Polarwinkel · und Azimutwinkel ¸ des Nanorods.
88
Die Position eines Nanorods sei durch dessen Schwerpunktlage 163 bzgl. des
Fallenzentrums definiert. Die Orientierung des Nanorods sei festgelegt durch den
Auslenkwinkel · 163 zwischen langer Zylinderachse und der z-Achse und durch den
Auslenkwinkel ¸ 163 zwischen langer Zylinderachse und der x-Achse. Für eine
Linienfalle entlang der x-Richtung ergibt sich eine Gleichgewichtsorientierung von
· =90°, ¸ =0°.
In diesem Kapitel folgt zunächst ein Modell zur Erklärung der QPD Signale eines
Nanorods in einer Linienfalle. Anschließend werden Messdaten eines durch einen
Laserfokus gescannten, fixierten Nanorods gezeigt und diskutiert. Im Haupteil des
Kapitels wird der entwickelte Algorithmus zur Bestimmung der Raumlagekoordinaten
beschrieben. Außerdem werden experimentelle Ergebnisse präsentiert und besprochen, in
denen ein in einer Linienfalle diffundierendes Nanorod getrackt wurde.
5.4.1
Modell: 1D Nanorod aufgebaut aus Rayleighstreuern
Die Intensitätsverteilungen in der BFP bzw. die QPD Signale für einen Halbscan einer
Linienfalle mit gefangenem Nanorod können berechnet werden, wie diejenigen für ein
Nanorod, welches (entgegen der Scanrichtung der Linienfalle) durch einen statischen
Fokus fährt, siehe Abb. 5.23.
a)
b)
Sx(x)
CM
Xpos_max
1
bx
Xpos_min
0
-1
z
x
x
-3
-2
-1
0
1
2
3
Abb. 5.23. Fokus mit Modellrod und ~c Signal. a) Ein Nanorod mit Länge L=4, aufgebaut
aus einer linearen Kette von Punktstreuern, ist in x-Richtung orientiert und wird in –xRichtung durch den Fokus gefahren. Der Schwerpunkt (engl. centre of mass, CM) des
Nanorods ist eingezeichnet. b) dazugehöriges ~c Signal, Einheiten in a.u..
Zur Berechnung von BFP Intensitätsverteilungen und QPD Signalen wurde ein Nanorod
mit Länge â 4 als eine lineare Kette von 41 Punktstreuern mit Abstand I 0.1
dargestellt, wie in 3.1.5 beschrieben.
Die BFP-Intensitätsverteilung für einen Punktstreuers im Fokus wurde dabei
folgendermaßen berechnet.
BFP-Intensitätsverteilung für einen Punktstreuers im Fokus
Unter Verwendung der Zweistrahl-Interferenz-Formel gemäß Gl. (2.14) und der Phase
Φ j/2 des ungestreuten Feldes [42] aufgrund der Gouy Phasenverschiebung [43, 44]
und 1j/2 Φ 3 f1Φ 3 kann die Intensitätsverteilung a ≡ aobc , bp , q in der
BFP beschrieben werden durch
89
5 Tracking von Nanorods
%
%
a Mn Mn 2Mn Mn f1Φ 3
(5.25)
mit ungestreutem und gestreutem Feld Mn ≡ Mn obc , bp q, Mn ≡ Mn obc , bp , q und der
Phase des gestreuten Feldes Φ ≡ Φ obc , bp , q.
Φ obc , bp , q Φ 13 Φ obc , bp , q
(5.26)
ergibt sich aus zwei Termen, der Phase Φ 13 mit der der Streuer angeregt wird und der
A/%
Phase Φ obc , bp , q bc c bp p ob % bc% bp% q aus der Modulation des
Formfaktors gemäß Gl. (3.6) durch eine Auslenkung des Streuers vom Ursprung des
Koordinatensystems.
Zum Zweck einer rein analytischen Berechnung eines Streufeldes gemäß Gl. (3.22) und
damit einer Intensitätsverteilung in der BFP wurde die E-Feld Verteilung M 1'3 des Fokus
als paraxialer Gaußstrahl, siehe Abschnitt 3.2, beschrieben. Diese Fokusbeschreibung ist
weniger geeignet für exakte quantitative Aussagen. Dennoch, werden mit Gl. (3.29)
folgende wesentliche Eigenschaften eines hochfokussierten Feldes qualitativ
berücksichtigt:
1)
2)
3)
4)
Gouy-Phasenverschiebung
axiale Phasensteigung
Phasenfrontkrümmung
Intensitätsgradienten in axiale und laterale Richtung.
Die Parameter zur Beschreibung des Fokus waren 1, =1.33, A =1, W = .
Der Betrag des Streufeldes eines Punktstreuers wurde auf Mn, =0.1 M o q gesetzt,
wobei sich M o q nach Gl. (3.29) mit der Phase des anregenden Feldes Φ 13 gemäß Gl.
(3.30) berechnet.
Die Fernfeldverteilung des ungestreuten Feldes kann als konstant gleich eins angesetzt
werden, Mn obc , bp q 1 und ergibt somit lediglich einen Offset in der Intensität. Es wird
zwar die BFPOL der Objektivlinse typischerweise mit einem Gaußprofil bestrahlt und
entsprechendes gilt aufgrund des 4-f-Systems und ohne Streuer auch für die BFP der
Detektionslinse. Die Vernachlässigung des Gaußprofils ist jedoch für eine starke
Überausleuchtung der BFPOL (Verhältnis der Durchmesser von Gaußstrahl mit Intensität
auf 1/e2 abgefallen und der der BFP) eine gute Näherung. Dies gilt insbesondere, wenn
die numerische Apertur der Detektionslinse kleiner als die der Objektivlinse ist,
NADL<NAOL. Daher kann eine homogene Ausleuchtung der BFP durch das ungestreute
Feld angenommen werden.
BFP-Intensitätsverteilung mehrerer Punktstreuer im Fokus
Vernachlässigt man die Interferenz der Punktstreuer untereinander und subtrahiert das
Amplitudenquadrat des ungestreuten Feldes, so lässt sich die Intensität in der BFP als
Summe der Beiträge der einzelnen Punktstreuer schreiben, als
90
%
ayy ∑ 4Mn, 2Mn Mn, foΦ, q8
(5.27)
Die BFP Intensitätsverteilung ayy obc , bp , q eines Nanorods mit Länge â 1Û 13I,
beschrieben durch Û 2 +1 Punktstreuer, berechnet sich aus einer Summe über j=-j0 …
j 0.
Die QPD Signale wurden durch numerische Integration erhalten, wobei
z/%
~c d
\z/%
r(
z
~p d d
r(
d
ayy 1b , ¼, 3b Ib I¼
J/%z
d
z/%
r(
d
ayy 1b , ¼, 3b Ib I¼
ayy 1b , ¼, 3b Ib I¼ d
%z
%z
~ d
r(
d
z
r(
d
ayy 1b , ¼, 3b Ib I¼
ayy 1b , ¼, 3b Ib I¼
(5.28)
(5.29)
(5.30)
mit bc b 1¼3 und bp = b f1¼3. Es wurde b$ =0.9b verwendet.
Es wurde b$ f1(3b 0.9b verwendet, was für Wasserimmersion und n=1.33 einer
numerischen Apertur Û0 = f1(3 1.2 entspricht.
2
2
Sx(x,y)
1
0
2
1
0
Sx(x,z)
1
2
SxNxy
1
0
2
0
2
0
Sx(y,z)
1
2
SxNxz
0
2
0
1
2
SyNxy
Sy(x,z)
1
2
0
0
2
0
1
2
Sz(x,z)SzNxy
Sx,Sy,Sz
(a.u.)
1
0
1
2
SyNxz
Sy(y,z)
1
0
Sz(x,y)
1
1
1
0
2
Sy(x,y)
0
2
0
1
2
Sz(y,z) SzNxz
1
0
1
2
0
0
1
2
Abb. 5.24. Berechnete 2D Signalverteilungen der QPD Signale ~c , ~p und ~ für drei
orthogonale Schnittebenen zentral durch einen Punktstreuer. Es ist jeweils das erste
Argument horizontal, das zweite Argument vertikal aufgetragen, Einheiten in a.u..
91
5 Tracking von Nanorods
Abb. 5.24 zeigt die berechneten 2D Signalverteilungen der QPD Signale ~_, ~l und ~ für
drei orthogonale Schnittebenen zentral durch einen einzigen Punktstreuer. Diese stimmen
gut mit den erwarteten Signalverteilungen [9] überein.
Abb. 5.25. Orthogonale Schnittebenen durch Nanorod. a) Nanorod mit Raumlage
b=(0,0,0,90°,0), b) Nanorod mit Raumlage b=(0,0,0,80°,0).
Sx(x)
Sy(x)
0
2
4
4
2
0
2
0
20
6
SyNxy00
1
Sy(x,z)
4
Sx(y,z)
2
2
4
0
SxNxz00
Sy(y,z)
0
0.0
1.0
2
2
6
4
6
4
6
2
SzNxy00
1
Sz(x,z)
4
0
6
2
SyNxz00
1
Sz(y,z)
0
0.0
2.0
Sx(x)
4
0
6
1
2
1
0
0
1.0
2
SzNxz00
Sx,Sy,Sz
(a.u.)
1
0
0.0
2.0
Sy(x)
1.0
2.0
Sz(x)
1
1
0
105
0
-1
-1
2
104
2
2
0
Sy(x,y)
1
0
20
Sx(x,z)
6
Sz(x,y)
0
20
0
Sx(x,y)
4
1
6
SxNxy00
1
2
0
Sy(x,y)
2
104.4
2
6
1
0
20
Sx(x,z)
104.6
0
-1
2
Sx(x,y)
Sz(x)
1
1
0
-1
2
4
1
Sy(x,z)
0
4
6
Sz(x,y)
1
0
20
6
SxNxyt80
2
2
4
6
SyNxyt80
1
Sz(x,z)
Sx(y,z)
2
2
4
0
SxNxzt80
Sy(y,z)
1
0
0.0
6
1.0
2.0
2
0
20
2
4
6
4
6
4
6
SzNxyt80
1
0
0
0
0
1
2
2
4
1
0
0.0
6
0
2
SyNxzt80
Sz(y,z)
1.0
2.0
2
SzNxzt80
1
0
0.0
1.0
2.0
Abb. 5.26 Berechnete 2D Signalverteilungen der QPD Signale Sx, Sy und Sz für drei
orthogonale Schnittebenen und zwei unterschiedliche Raumlagen des Nanorods (vgl. Abb.
5.25). Es ist jeweils das erste Argument horizontal, das zweite Argument vertikal
aufgetragen, Einheiten in a.u.. Des Weiteren sind Linienprofile entlang der x-Richtung und
zentral durch das Nanorod abgebildet.
Betrachtet man das ~_ 1_3 Detektionssignal eines Nanorods, wie in Abb. 5.23, nicht nur
für eine Auslenkung entlang der x-Richtung, sondern etwa ~_ 1_, l3 für eine xy-Ebene, so
92
sind ebenso die Fälle abgedeckt, dass das Nanorod gegenüber der Linienfalle parallel mit
unterschiedlichen Auslenkungen in y-Richtung verschoben ist.
In Abb. 5.26 sind die 2D Signalverteilungen der ~_, ~l und ~ Signale für drei
orthogonale Schnittebenen zentral durch das Nanorod für zwei unterschiedliche
Raumlagen, siehe Abb. 5.25, gezeigt. Die Signalverteilungen des modellierten Nanorods
aus Punktstreuern ergeben sich offensichtlich aus der Überlagerung der Signale der
einzelnen Punktstreuer.
Nun sei der Fall betrachtet, bei dem das Nanorod genau entlang der x-Richtung orientiert
ist. Zunächst soll das ~_ 1_, l3 Signal verstanden werden. Überlagert man die
Detektionssignale für jeden Rayleighstreuer aus dem das beschriebene Nanorod besteht,
so löschen sich positive und negative Signalbeiträge zum Teil aus. Es verbleibt ein
Signalmaximum am Anfang und ein Minimum am Ende des Nanorods. Die
Schwerpunktposition bx des Nanorods mit Länge L muss aus Symmetriegründen mittig
liegen.
Analog ergibt sich das Sy(x,y) Signal. Hier gibt es jedoch keine Auslöschungen. Es
überlappen sich die positiven, sowie auch die negativen Signalbeiträge der Punktstreuer
zu breiten Bändern ober- und unterhalb des Nanorods. Das ~1_, l3 Signal des Nanorods
in der XY-Ebene ist entsprechend ausgedehnt entlang der langen Achse des Nanorods
und das Linienprofil ist flach.
Weiterhin ergeben sich ganz analog auch die Signale für ein Nanorod, welches in der XZEbene um einen Winkel · gegen die x-Achse ausgelenkt ist. Insbesondere sei hier auf
die Steigung im Linienprofil ~1_3 hingewiesen. Hieraus kann der axiale Auslenkwinkel
bestimmt werden, wie weiter unten beschrieben wird.
5.4.2
Experimentelle QPD Signale eines fixierten Nanorods
In diesem Abschnitt werden experimentelle Signale besprochen, die sich für ein fixiertes
Nanorod ergaben, das durch einen Fokus gescannt wurde. Dies ist nützlich um später die
Messsignale von einem Nanorod in einer Linienfalle zu verstehen. Des Weiteren werden
die Daten mit berechneten Signalverteilungen verglichen. Vorab sei noch auf die
experimentelle Umsetzung des Mäanderscans eingegangen.
Bei einem Mäanderscan wird ein fixes Objekt (z. B. auf einem Deckgläschen fixiert oder
in ein Gel eingebettet) mit der Nanostage, siehe Abschnitt 4.2, durch den Fokus gescannt.
Dieses Verfahren ist als Kalibrationsscan für Beads üblich, vgl. Abschnitt 2.5 und liefert
Signalverteilungen, wie in Abb. 5.24 gezeigt. Die Nanostage fährt dabei festgelegte
Punkte auf einer mäanderförmigen Trajektorie ab. In jeder Position werden QPD Signale
aufgezeichnet. Aus den Daten können Signal-Scan-Plots generiert werden.
Einstellparameter – Dauer eines 2D-Signal-Scans
Für jede Position (x,y,z) der Nanostage und parallel für alle Kanäle ch_i zum Einlesen der
QPD Signale ~ 163 mit i=x, y,z wurden bei einer Abtastrate von 2 kHz eine Anzahl von
200 Signalen ~ 163 aufgezeichnet, was 0.1 s = 100 ms dauerte. Anschließend wurde die
Messung für eine Ruhezeit von 50 ms eingestellt, damit die Nanostage erneut verfahren
konnte. Für einen quadratischen Scanbereich mit Kantenlänge 2 µm und einer
93
5 Tracking von Nanorods
Diskretisierung von dx = 0.1 µm dauert ein Scan somit 66.15 s. Für die Signal-Scan-Plots
wurden Mittelwerte der QPD Signale verwendet.
Abb. 5.27 Mäanderscan eines fixierten Nanorods. a) Mikroskopbild von Nanorods auf
einem Deckgläschen. Eingerahmtes Nanorod (L=5.2µm, D=0.1µm) wird durch statischen
Fokus (weißer Punkt) gescannt. b) Mäander-Trajektorie der Nanostage in einer Ebene mit
Schrittweite dx=0.1µm. c) Nanorod mit xy-, xz und yz-Schnittebenen. Das Nanorod liegt in
einer xy-Ebene und ist um einen Azimutwinkel ¸ ausgelenkt. Die xy-Schnittebene liegt
genau unterhalb des Nanorods.
Sy(x)
6
0
2
Sy(x,z)
6
Sz(x,z)
6
0
2
3
4
6
0
0.0
1
0
0
-1
4
6
Sx(x,y) 1
2
4
6
2
0
104.8
104.6
104.4
2
0
2
4
0
2 0
2
4
6
SyNxyZ104
Sy(x,z) 1
0
2
4
6
0
20
2
2
Sy(y,z)
1.0
2.0
4
6
4
6
4
6
SzNxyZ104
4
6
0
2
2
1
0
0.0
2
0
0
2
Sx(y,z)
0
Sz(x,z) 1
0
0
2
6
Sz(x,y) 1
SxNxyZ104
Sx(x,z) 1
1.5
Sz(x)
Sy(x,y) 1
0
2 0
6
Sx,Sy,Sz
(a.u.)
0.0
1.5
-1
2
4
1
Sz(y,z)
0.0
1
6
Sz2xz
µm
1
1.5
Sy(x)
0
2
Sy1xz
µm
0
0
1
Sy(y,z)
Sx(x)
4
Sz2xy
µm
2
2
Sx1xz
µm
Sx(y,z)
2
3
4
3
2
0
0
0
0
0
2
4
Sy1xy
µm
2
2
0
3
4
Sx1xy
µm
2
2
1
0
3
0
Sz(x,y)
1
3
0.7
1
1
Sy(x,y)
1
Sx(x,z)
0.8
-0.2
0
Sx(x,y)
Sz(x)
0.9
0.0
1
Sx(x)
0.1
0.0
-0.1
2
Sz(y,z)
1
0
0.0
1.0
2.0
1
0
0.0
1.0
2.0
Abb. 5.28 Signal-Scan-Plots eines fixierten Nanorods für drei orthogonale Schnittebenen
durch das Nanorod (vgl. Abb. 5.27), experimentelle (oben) und theoretische Daten (unten).
Es ist jeweils das erste Argument horizontal, das zweite Argument vertikal aufgetragen,
mit Skalierung in µm. Des Weiteren sind Linienprofile entlang x und zentral durch das
Nanorod abgebildet. Die Länge des Nanorods war L=5.2µm (im Experiment) und L=4µm
(in Berechnung).
94
Vor dem Aufzeichnen der QPD Signale wurden die QPDs derart justiert, dass die
lateralen Positionssignale des leeren Fokus verschwanden, so dass ~_ = ~l = 0. Die axiale
Position der XY-Scanebene lag für die gezeigten Messdaten etwas unterhalb des
Nanorods, siehe Abb. 5.27, was insofern interessant ist, als ein Objekt in einer optischen
Falle typischerweise aufgrund des Strahlungsdrucks in axiale Richtung ausgelenkt ist.
Die experimentell bestimmten Signalverteilungen stimmen sehr gut mit den berechneten
überein. Insbesondere sei hier auf die Steigung im Linienprofil ~l1_3 hingewiesen.
Hieraus kann der Auslenkwinkel ¸ bestimmt werden, wie weiter unten beschrieben. Die
Steigung im Linienprofil ~1_3 ist erwartungsgemäß flach, da das Nanorod in der XY
Ebene lag.
5.4.3
Bestimmung der Schwerpunkt- und Orientierungssignale
In diesem Abschnitt wird eine neue Methode vorgestellt, mit der man für ein
stäbchenförmiges Objekt in einer Linienfalle die Raumlage tracken kann.
Vorteilhafterweise können hierzu die standard QPD-Signale aus der BFP-Interferometrie
verwendet werden, vgl. Abschnitt 2.3. Für die Detektion muss die Richtung der
Linienfalle parallel zur x- bzw. y-Richtung sein, da die QPD Signale auf diese
Richtungen ausgelegt sind.
Die Signale einer QPD werden typischerweise mit ~c , ~p und ~ bezeichnet und wurden
auch als solche eingeführt. Solche (Roh)Signale einer QPD1 und einer QPD2 können
entsprechend als 1c , 1p und 2 Signal bezeichnet werden. Dies ist
nützlich, da für das gefangene Nanorod in der Linienfalle aus den gemessenen QPD
Signalen aus einem Messintervall eines Halbscans erst fünf Signale ~ mit f _, l, , , ¼
berechnet werden müssen, welche proportional zu einer Koordinate des Nanorods sind.
Die Bestimmung der Schwerpunktkoordinate in Richtung parallel zur Linienfalle wird als
erstes beschrieben und unterscheidet sich wesentlich gegenüber der von
Schwerpunktkoordinaten in Richtungen senkrecht zur Linienfalle.
Bestimmung der Auslenkungen parallel zur Linienfalle
Das ~_ 1_3 Signal, wie in Abb. 5.23, für einen Halbscan der Linienfalle zeichnet sich
durch ein Minimum und ein Maximum aus, welche den Anfang und das Ende des
Nanorods indizieren. Die Schwerpunktposition c wird aus der Mitte der
Extremapositionen Xpos_min und Xpos_max bestimmt.
c 1öe_+_ öe_+f3/2
(5.31)
Über die drei bekannten Größen Fallenfrequenz f, Länge len der Falle und Abtastrate Sr
kann das ~_ 163 Signal in Volt als Funktion der Zeit von seiner Zeitabhängigkeit direkt in
die gewünschte Positionsabhängigkeit mit Abtastweite ∆x = 2f len/Sr umskaliert werden.
Damit erhält man c bereits in einer Längeneinheit.
Bestimmung der Auslenkungen senkrecht zur Linienfalle
Die Schwerpunktauslenkung p 163 eines Nanorods kann aus dem Wert des Signals
1p 1_3 eines Halbscans an der Stelle _ c der ermittelten Schwerpunktposition c
des Nanorods in der Linienfalle bestimmt werden. Wegen des zugrundeliegenden
Rauschens auf den experimentellen Signalen ist es zur Fehlerreduzierung jedoch sinnvoll
95
5 Tracking von Nanorods
die Statistik mehrerer Messpunkte in der Umgebung von _ c zu nutzen. Daher wird
p 163 aus einem mittleren 1p 1_3 Signal bestimmt. Theoretisch ist der Bereich
entlang der X-Linienfalle von 1p 1_3 Signalen mit Werten ungleich Null kürzer, als
der Abstand der Extrema des 1c 1_3 Signals. Das mittlere 1p 1_3 Signal wird
daher aus einem geeigneten, möglichst weiten Bereich von n+1 Punkten um _ c
bestimmt. Die axiale Schwerpunktposition eines Nanorods wird analog aus dem
mittleren Wert des 2 1_3 Signals ermittelt.
p /%
1
1
1
É
1p 1c f3 ~p
p 1 Z\/%
p
(5.32)
/%
1
1
1
É
2 1c f3 ~
1
Z\/%
(5.33)
mit den Kalibrationskontanten p , . Diese können etwa mittels Langevin-Kalibration
bestimmt werden, siehe Abschnitt 5.4.5.
Bestimmung der Orientierung
Die Orientierung erhält man direkt als die gesuchten Auslenkwinkel, wenn die
Kalibrationskontanten p und bereits ermittelt wurden. Zur Bestimmung des
Azimutwinkels ¸ werden dieselben 1p 1_3 Signale eines Halbscans, wie bei der
Bestimmung von p verwendet. Ein Linearfit gemäß einer Funktion ^1_3 +_
liefert die mittlere Steigung + ∆1p /1∆_3 des 1p 1_3 Signals im gewählten
Bereich um _ c . Der Steigungswinkel ist gleich dem gesuchten Azimutwinkel ¸ des
Nanorods. Analog kann der Polarwinkel ¸ eines Nanorods aus dem 2 1_3 eines
Halbscans gewonnen werden.
¸ 6\A hp ∆1p /1∆_3i
(5.34)
· 6\A ] ∆2 /1∆_3`
(5.35)
Die geschilderte Raumlagebestimmung eines Nanorods basiert auf der Bestimmung der
Schwerpunktlage des Nanorods in Richtung der Linienfalle. Hierzu werden die
Extremapositionen im 1c 1_, 63 Signal verwendet, welche von den Enden des
Nanorods herrühren. Diese Extremapositionen verschwinden, für große Abstände der
Enden des Nanorods zur Achse der Linienfalle. Der Abstand I eines Endes mit Position
" für ein dünnes Nanorod (1D Näherung), zu einer Achse des Koordinatensystems mit
Einheitsvektoren mit f _, l, lautet
I |" 7 |
wobei
" â/2
mit
Schwerpunktsposition
= oc , p , q
Richtungsvektor = hf1· 3
o¸ q, f1· 3fo¸ q, 1· 3i.
Ic 1, â3 = *hp â/2f1· 3fo¸ qi ] â/2
1· 3`% +
%
96
A/%
(5.36)
und
(5.37)
Insofern ist der Detektionsbereich begrenzt und hängt von einem maximalen Abstand
I 1, â3 eines Endes des Nanorods zur Achse der Linienfalle ab. Dieser wiederum ist
sowohl von den Auslenkungen senkrecht zur Achse der Linienfalle, den
Winkelauslenkungen, als auch von der Länge des Nanorods abhängig.
5.4.4
Experimentelle Durchführung
Das Ziel war, experimentell zu zeigen, dass die Auslenkungen und Winkelauslenkungen
eines Nanorods in einer Linienfalle zeitlich aufgelöst bestimmt werden können.
In den durchgeführten Experimenten wurde ein einzelnes Nanorod (ZnO, L=3.46µm,
DY0.1µm) in Wasser in einer Linienfalle gefangen. Der experimentelle Aufbau ist in
Abschnitt 4.2, die Probenpräparation in Abschnitt 4.3 beschrieben. Die Linienfalle war in
x-Richtung (parallel zur Polarisationsrichtung des Lasers) ausgerichtet. Das Nanorod
orientierte sich mit seiner langen Achse entlang der X-Linienfalle, die länger als das
Nanorod dimensioniert war. Die Scangeschwindigkeit der Falle war groß, so dass das
Nanorod im Wesentlichen eine statische Potentiallandschaft sah, innerhalb dessen es
diffundieren konnte. Die Diffusion wird allgemein beherrscht durch die Brownsche
Bewegung, das externe Potential der optischen Falle und der Reibungskraft durch das
Medium, s. Abschnitt 2.4.
Die Raumlage (Position und Orientierung) des Nanorods konnte getrackt werden. Dazu
wurden mit fester Abtastrate QPD Signale aufgezeichnet. Jedes QPD Signal ist damit
einer Fallenposition zuordenbar. Für einen Halbscan, währenddessen die Falle von einem
Ende der Linienfalle zur anderen verfährt, wurden entsprechend der Abtastrate, der Länge
und der Frequenz der Linienfalle eine gewisse Anzahl von QPD Signalen aufgezeichnet.
Ein solcher Linienscan wurde zur Bestimmung der Raumlage des Nanorods verwendet.
Im Anschluss an eine Messung wurde noch ein Leerscan durchgeführt, zum Aufzeichnen
Setup-spezifischer Offset-Signale, welche von der Fallenposition abhingen. Diese wurden
von der tatsächlichen Messung abgezogen. Für eine Echtzeit Raumlagebestimmung kann
ein solcher Leerscan bereits vorab durchgeführt werden.
Die Zusammenhänge und die verwendeten Werte wichtiger Einstellparameter sind in
Tabelle 5.2 aufgeführt.
Größe
Länge der Linienfalle
Winkel in XY-Ebene zur x-Achse
Frequenz (hin u. zurück)
Ausgaberate
Anzahl der Punkte pro Halbscan
Intensitätsprofil entlang Linienfalle
Laserleistung (im Fokus)
Dauer eines Halbscans
Scangeschwindigkeit
Abtastrate
Anzahl Messpunkte pro Halbscan
Abtastweite
Messdauer
Anzahl Messpunkte
Anzahl Scans
Symbol
len
phi
f
Or
No = Or/f
Int(x)
Imax
T/2 = 1/(2f)
v = 2 len/T = 2f len
Sr
nb = Sr T/2 = Sr/(2f)
∆x = len/nb = 2f len/Sr
tges
N = tges*Sr
nb_scans = f tges
Wert
5 µm
0°
100 Hz
104 Hz
100
konstant
63 mW
5 ms
1 µm/ms
104 Hz
50
100 nm
1s
104
100
Tabelle 5.2 Einstellparameter für Linienfalle und Datenaufzeichnung.
97
5 Tracking von Nanorods
5.4.5
Auswertung der Messdaten
In diesem Abschnitt wird die Auswertung der Messdaten zur Bestimmung der
Schwerpunkt- und Orientierungssignale eines Nanorods in einer X-Linienfalle erklärt und
exemplarisch für das beschriebene Experiment vorgeführt. Die 1c , 1p , 2
Signale und das Positionssignal ö$ des X-Scanspiegels liegen aus dem Experiment
vor. Die Signale sind des Weiteren vorhanden für eine Messung mit Objekt und für eine
Leermessung. Die Leermessung dient als Referenz. Die Signale beider Messungen
müssen aus verschiedenen Gründen miteinander verrechnet werden. Diese werden an
entsprechender Stelle diskutiert.
Das Vorgehen gliedert sich folgendermaßen auf
1. Phasenabgleich von Messung mit Objekt und Leermessung
2. Festlegung des ersten Umkehrpunktes t=0 und Zerlegung der Messdaten in
Halbscans
3. Synchronisation (einmalig) der einzelnen Signale einer Messung
4. Subtraktion des Leersignals
5. Raumlagebestimmung gemäß Anleitung aus Abschnitt 5.4.3
Da eine Messung bei unbestimmter Fokusposition gestartet wurde, mussten die Signale
aus der Messung mit Objekt und der Leermessung zeitlich abgestimmt werden, so dass
die Umkehrpunkte der Linienfalle zeitlich zusammenfielen. Der Phasenabgleich beider
Messungen kann mit einer Kreuzkorrelation KK der Xmirror Signale durchgeführt
werden. Der zeitliche Versatz ergibt sich aus der Maximumsposition der KK.
Praktischerweise startet man eine Messung besser genau an einem Umkehrpunkt der
Linienfalle.
Signal (mV)
-10
Xmirror
Xmirror_0
-15
x10
-20
-25
-30
-35
-40
t (ms)
-10
0
10
ms
20
30
40
Abb. 5.29 Positionssignale von X-Scanspiegel vs. Zeit für X-Linienfalle aus einer Messung
mit Nanorod und einer Leermessung. Die Phasen der Signale wurden abgeglichen, dass
deren erste Minima bei t = 0 liegen. Damit ist für den Zeitpunkt t = 0 die Linienfalle gerade
in einem Umkehrpunkt.
Als nächsten Schritt erweist es sich als praktisch für die weitere Auswertung die Signale
in Zeitabschnitte einzelner Halbscans zu zerlegen. Dazu muss ein Nullpunkt t=0 an einem
Umkehrpunkt der Linienfalle gefunden werden. Ist der Nullpunkt korrekt gewählt, liegen
die mittleren Xmirror Signale aller geraden und ungeraden Halbscans idealerweise
übereinander. Ein Versatz von höchstens 1/Sr kann vorkommen und kann durch eine
hohe Abtastrate Sr (sampling rate) oder durch Interpolation minimiert werden. Durch
einen Versatz werden die Raumlagekoordinaten mit einem systematischen Fehler nicht
exakt der Fallenposition zugeordnet. So können infolgedessen etwa das letzte QPD Signal
eines Halbscans in die Hinrichtung fälschlicherweise dem ersten des Halbscans in die
98
Rückrichtung der Linienfalle zugeordnet werden. Das wirkte sich in einer daraus
bestimmten Schwerpunktposition in Richtung der Linienfalle derart aus, als würde
vermeintlich ein verstärktes Kicking, siehe 8.5, vorliegen.
Weiterhin müssen die Signale der einzelnen Kanäle einer Messung synchronisiert
werden. Insbesondere kann sich die Dauer der Signalwege der Scanspiegel Signale von
denen der QPD Signale unterscheiden. Folgerichtig müssen die Scanspiegel Signale mit
den QPD Signalen einer Messung synchronisiert werden. Gegebenenfalls muss eine
relative zeitliche Verzögerung bestimmt werden. Dies war nicht der Fall. Ferner wurde
angenommen, dass die Signale einer QPD, sowie auch die Signale von QPD1 gegenüber
denen von QPD2 synchronisiert sind. Begründet werden kann dies damit, dass baugleiche
QPDs und Signalverarbeitungselektronik verwendet wurden. Sofern Bandpassfilter
verwendet werden, können allerdings Verzögerungen in der Signalverarbeitung auftreten.
Als nächsten Schritt erweist es sich als praktisch die aufgezeichneten 1D Signale in 2D
Arrays umzuordnen, so dass die Signale eines Halbscans in einer Zeile stehen, siehe
Kymographen in Abb. 5.30. Um die Scanrichtung zu berücksichtigen wurde jede zweite
Zeile umgedreht. Die Halbscans liegen zeitlich T/2 auseinander. Gegebenenfalls ist es
sinnvoll die Halbscans in Hin- und Rückrichtung getrennt voneinander auszuwerten, etwa
wenn Kicking vorliegt.
a)
Xpos_max(t)
4
0.0
2
0
2
0.4
0.6
x (µm)
4
Xpos_min(t)
bx(t)
0
Signal (x,t)
in a.u.
Zeit (s)
0.4
0.6
0.8
x (µm)
e)
0.8
0.8
0.4
0.2
0
0.6
0.8
Zeit (s)
4
d)
0.2
2
0.2
0
0.0
c)
0.0
b)
x (µm)
0
x (µm)
Abb. 5.30 Schwerpunkttrajektorie c 163 von Nanorod in X-Linienfalle in x-Richtung. a)
Mittleres Signal ⟨1c 1_3⟩ aller Halbscans der Leermessung. b-d) Kymographen des
Leersignals, des Signals mit Nanorod und des Differenzsignals (vlnr). Nach rechts ist die
Fokusposition innerhalb eines Halbscans und nach unten ist die Zeit aufgetragen. e)
Extrahierte Maxima- und Minimapositionen des Differenzsignals und daraus berechnete
Schwerpunktpositionen c 163 des Nanorods.
Subtraktion des Leersignals
Aus den Signalen der Leermessung werden jeweils mittlere Signale berechnet. Damit
wird ein Referenzsignal erzeugt, das weitgehend vom Rauschen befreit ist und im
Folgenden als Offset von den entsprechenden Messsignalen mit Objekt subtrahiert wird.
Subtrahierte man stattdessen direkt das Leersignal von dem Messsignal mit Objekt in der
Falle, so addierten sich die Rauschamplituden.
99
5 Tracking von Nanorods
Eine Subtraktion des Leersignals ist notwendig, sofern ein Fokusversatz eine Änderung
der QPD Signale mit sich bringt. Ein geringfügiger Einfluss kann daher rühren, dass ein
Versatz des Fokus eine Verkippung des einfallenden Lichtes in der BFP bedeutet. Damit
fällt der Laserstrahl unter verschiedenen Winkeln auf die QPD und aufgrund
winkelabhängiger Reflektivität werden unterschiedliche Intensitäten detektiert. Bei dem
verwendeten Aufbau liegt die BFP zwischen den Scanspiegeln, siehe Abschnitt 4.2.2.
Daher führt ein Verkippen der Spiegel sowohl zu einer Verkippung, als auch zu einem
Versatz des Strahls in der detektionsseitigen BFP.
Auslenkungen entlang der Richtung der Linienfalle
In Abb. 5.30 sind die Schritte der Auswertung und die Extraktion der Bewegung des
Nanorods in der X-Linienfalle in x-Richtung veranschaulicht. Die 1c 1_3 Signale der
Leermessung, der Messung mit Objekt und das Differenzsignal sind in Form von
Kymographen dargestellt. Aus dem Differenzsignal wird für jeden Halbscan, wie in
Abschnitt 5.4.3 beschrieben, die Schwerpunktposition c des Nanorods gefunden.
b)
0
2
4
0.4
0.6
Zeit (s)
bz (nm)
500
0.10
0.2
0.0
a)
Zpos_even_calib
400
0.00
300
-0.10 V
200
0.8
100
0
x (µm)
0.0
0.2
0.4
0.6
0.8
t (s)
s
c)
d)
Hist (#)
(a.u.)
Zpos_even_calib_Hist
fit_Zpos_even_calib_Hist
Zpos_even_corr_resca
fit_Zpos_even_corr_resca
Coefficient values ± one standard deviation
A
=17.527 ± 0.864
x0
=2.1335e-007 ± 6.87e-009
sigma =1.2098e-007 ± 7.22e-009
Coefficient values ± one standard deviation
y0
=0 ± 0
A
=0.00019721 ± 1.83e-005
invTau =30.221 ± 4.58
0.0
0.2
0.4
0.6
0.8
t(s)
bz(nm)
0
100
200
300
400
500
Abb. 5.31 Schwerpunkttrajektorie 163 von Nanorod in X-Linienfalle. a) Kymograph des
2 1_, 63 Signals mit Nanorod (das mittlere Leersignal ⟨2 1_3⟩ wurde subtrahiert).
b) Extrahierte Schwerpunktauslenkungen 163, mit Langevin-Kalibration kalibriert. c)
Autokorrelierte
]~ 163`
und
Exponential-Fit.
d)
Histogramm
der
Schwerpunktauslenkungen 163 und Gauß-Fit.
Auslenkungen senkrecht zur Richtung der Linienfalle und Winkelauslenkungen
Die zwei weiteren zu bestimmenden Bewegungen senkrecht zur Richtung der Linienfalle
l163 und 163, sowie die zwei Winkelauslenkungen ¼ 163 und 163, werden zunächst
aus den entsprechenden Differenzsignalen aller Halbscans als unkalibrierte Signale in
Volt aus den 1p 1_, 63 und 2 1_, 63 Signalen ermittelt (wie in Abschnitt 5.4.3
beschrieben). Diese können schließlich unter Annahme eines harmonischen Potentials
100
und kleiner (Winkel-)Auslenkungen durch Langevin-Kalibration (siehe Abschnitt 2.5) in
die gesuchten (Winkel-)Auslenkungen in einer Winkel- bzw. Längeneinheit umgerechnet
werden. Zudem können Fallensteifigkeiten bzgl. Translation und Rotation bestimmt
werden. Abb. 5.31 zeigt exemplarisch das Differenzsignal des 2 1_, 63 Signals als
Kymograph, sowie die daraus extrahierte Trajektorie 163 des Nanorods in der
Linienfalle und ein Histogramm der Auslenkungen in z-Richtung. Zudem ist die
Autokorrelierte des ~ 163 Signals mit einem Exponentialfit abgebildet.
Abschätzung der Reibungskoeffizienten
Zur Berechnung der Reibungskoeffizienten (siehe Abschnitt 4.1.1) müssen Angaben zur
Temperatur-abhängigen Viskosität des Mediums, welche linear einfließt, zur Länge L
und zum Durchmesser D des Zylinders gemacht werden. Für eine Temperatur von 25 °C,
einer Länge von L = 3.46 µm und einem Durchmesser von D = 0.1 µm ergibt sich ∥ =
6.3 10-9 Ns/m. Für den Reibungskoeffizient ß bzgl. einer Translation senkrecht zur
Zylinderachse ergibt sich ß = 9.4 10-9 Ns/m. Für den Reibungskoeffizienten bzgl.
einer Rotation um den Schwerpunkt ergibt sich = 1.4 10-20 Nms.
5.4.6
Ergebnisse
Als Ergebnis kann festgehalten werden, dass ein ZnO Nanorod (L=3.46µm, DY0.1µm) in
einer Linienfalle gefangen wurde und dessen 5D Raumlage mit einer neuen Methode
zeitlich aufgelöst werden konnte, siehe Abb. 5.32.
Abb. 5.32 5D-Raumlage vs. Zeit von Nanorod in X-Linienfalle. Die zeitlich farbkodierte
Überlagerung zeigt das gefangene Nanorod mit Aspektverhältnis 3.46/0.1 für jeden
zweiten Messpunkt mit momentaner Orientierung und am Ort von dessen momentaner
Schwerpunktposition 163 zum Zeitpunkt t.
Das Experiment wurde als Machbarkeitsbeweis durchgeführt. Die Frequenz f=100Hz der
Linienfalle war gering und damit infolge auch die zeitliche Auflösung ∆t=1/(2f)=5ms und
die Statistik (200 Messpunkte) der bestimmten Dynamik des Nanorods in der Linienfalle.
Idealerweise ist die zeitliche Auflösung kleiner der Relaxationszeit ¡ , um diese bei der
Langevin-Kalibration möglichst exakt aus einem Exponential-Fit an die Autokorrelierte
101
5 Tracking von Nanorods
des entsprechenden Signals zu bestimmen. Die erhaltenen Relaxationszeiten mit
relativem Fehlern (entspricht einer Standardabweichung) waren ¡ p =4.9ms±26%,
¡ =30.4ms ±15%, ¡ ¸ =9.7ms ±15%, ¡ · =15.4±14%.
Abb. 5.33a zeigt, die Schwerpunktpositionen des Nanorods liegen in einem kleinen
Bereich mittig im Volumen der Linienfalle verteilt. Die Verteilung ist ellipsoidal. Die
Projektionen lassen unterschiedliche Standardabweichungen der Auslenkungen in die drei
Raumrichtungen erkennen. Am breitesten ist die Verteilung entlang der Linienfalle, hier
die x-Richtung. In z-Richtung ist die Verteilung breiter als in y-Richtung. Bezieht man
die Länge des Nanorods und die der Linienfalle mit ein, stellt man fest, dass das Nanorod
sich mit dessen ganzer Länge ausschließlich innerhalb der Linienfalle aufhielt. Dies wird
deutlich, geht man zurück zur Abb. 5.30. Die Figur d) zeigt einen Kymograph des
1c 1_, 63 Signals mit Maxima und Minima, welche die Enden des Nanorods in der
Linienfalle markieren. Daraus lässt sich bereits visuell qualitativ die Bewegung des
Nanorods in x-Richtung erfassen. Zu Beginn von t=0 bis etwa 0.3 s war das Nanorod am
linken Ende der Linienfalle gefangen. Dann löste es sich los, driftete zur anderen Seite
der Linienfalle (t = 0.5 s) und zurück (t = 0.6s) und hielt sich im letzten Viertel der
Messzeit im mittleren Bereich in der Linienfalle auf.
Abb. 5.33 Experimentell bestimmte Positionen und Orientierungen eines Nanorods in einer
X-Linienfalle. a) Pseudo-3D Darstellung der Schwerpunktpositionen oc , p , q in
einem Koordinatensystem bzgl. des Zentrums der Linienfalle mit Länge len=5µm und
deren Projektionen in die XY-, XZ- und YZ-Ebene. b) Scatterplot der Orientierungen
o· , ¸ q des Nanorods, welche über den Azimutwinkel ¸ und den Winkel 90° · gegen
die xy-Ebene aufgetragen sind.
Die Winkelverteilung, siehe Abb. 5.33b, zeigt eine Asymmetrie bzgl. Azimut- und
Polarwinkelauslenkung des Nanorods. Die Standardabweichung der Winkelauslenkungen
· ist größer, als die der Winkelauslenkungen ¸ .
Unter Annahme eines harmonischen Potentials und einer Temperatur von T=25° wurden
gemäß Gl. (2.28) aus den Standardabweichungen (¬p =49nm, ¬ =111nm) der kalibrierten
102
Auslenkungen Fallensteifigkeiten (p =1.7pN/µm, =0.3pN/µm) bzgl. der Translationen
senkrecht zur Richtung der Linienfalle bestimmt. Weiterhin wurden aus den
Standardabweichungen (¬¸ =2.6°, ¬· =7°) der kalibrierten Winkelauslenkungen
Fallensteifigkeiten (¸ =2.0pN/µm, · =0.3pNµm) bzgl. lateraler und axialer Rotationen
berechnet.
5.4.7
Diskussion und Ausblick
Bei der Langevin-Kalibration ist zu beachten, dass durch die verwendeten
Reibungskoeffizienten ein Fehler eingeht. Bzgl. des verwendeten Wertes von ß werden
in untenstehender Tabelle 5.3 relative Änderungen Δß in Prozent aufgeführt für einen
Durchmesser von D ± 40 nm (∆D = ± 40%) eine Länge von L ± 100 nm (∆L = ± 2.9%)
und eine Temperatur von T +1 °C, + 10 °C, +20 °C. Der Durchmesser kann nicht mit
dem Lichtmikroskop aufgelöst werden. Daher blieb nur die Angabe der breiten
Verteilung der Durchmesser aus einer SEM Messung. Die Länge kann
auflösungsbegrenzt aus einem Mikroskopbild bestimmt werden. Die Temperaturangabe
ist am schwierigsten. Die lokale Temperatur kann durch Aufheizen des Nanorods im
Laserfokus (Wellenlänge λ0 = 1064nm) durch Absorption gegenüber der Raumtemperatur
erhöht sein. Hier kann ein großer Fehler gemacht werden. Eine Angabe zum komplexen
Brechungsindex von Bulk ZnO bzw. von ZnO Nanorods wurde nicht gefunden.
Δß
D + 40 nm
D - 40 nm
L +100 nm
L – 100 nm
+8.8 %
-13.3 %
+2.1 %
-2.2 %
T + 1 °C
T + 10 °C
T + 20 °C
-2.3 %
-23.9 %
-49.9 %
Tabelle 5.3 Änderung Δß des Reibungskoeffizienten senkrecht zur Zylinderachse bei
Änderung des Durchmessers D, der Länge L und der Temperatur T, für einen Zylinder mit
L = 3.46µm, D = 0.1µm in Wasser bei T = 25 °C.
Eine Temperaturerhöhung durch Absorption könnte festgestellt werden, indem
aufeinanderfolgende Messungen evaluiert werden. Je länger ein Nanorod der Strahlung
ausgesetzt ist, desto größer müsste die Temperatur werden bis ein Gleichgewicht erreicht
ist und desto kleiner müsste die Viskosität werden, weil das Nanorod Wärme an die
Umgebung abgibt.
Das Tracking der Raumlage eines Nanorods in einer Linienfalle mittels BFP
Interferometrie ist neu. Es kann nützlich sein beim Aufbauen von funktionellen
Strukturen aus Nanorods, welche in horizontaler Lage (senkrecht zur optischen Achse)
mit optischen Pinzetten manipuliert werden, siehe Abschnitt 4.3.1. Ein wichtiger Vorteil
der vorgestellten Methode gegenüber dem Videotracking (siehe Einführung von Kapitel
5) ist, dass man die Raumlage eines Nanorods in einer Linienfalle inklusive der zPosition und dem Auslenkwinkel · zur z-Achse erhält. Die zeitliche Auflösung ist
durch die Scanfrequenz der Linienfalle beschränkt. Mit den verwendeten Scanspiegeln
und der optischen Übersetzung kann eine maximale Scanfrequenz von wenigen kHz bei
einer Linienfalle von wenigen µm Länge erreicht werden. Zur Steigerung der
Scanfrequenz kann eine Linienfalle alternativ auch sehr elegant ohne bewegliche
103
5 Tracking von Nanorods
Mechanik mit einem akusto-optischer Deflektor (AOD) erzeugt werden. Hier wird im
Wesentlichen der Effekt von Beugung am Gitter ausgenützt. Dazu wird eine akustische
Welle durch ein Trägermedium, typischerweise ein Kristall, geschickt. Die einhergehende
Modulation der optischen Dichte wirkt für den dazu senkrecht einfallenden Strahl als
Beugungsgitter. Während die nullte Beugungsordnung unbeeinflusst bleibt, wird die erste
Beugungsordnung entsprechend der Gitterfrequenz abgelenkt. Lässt man die Frequenz
der akustischen Welle oszillieren, wird der verwendete Strahl der ersten
Beugungsordnung abgelenkt, wie mit einem oszillierendem Kippspiegel. In Ref [144]
wird von Frequenzen von 10-40kHz berichtet. Zudem kann eine Linienfalle etwa
einseitig betrieben werden. Einseitig heißt dabei, die Linie in der Fokusebene wird Punkt
für Punkt von Anfang bis Ende abgefahren und ein Zyklus endet damit, dass der Fokus
direkt zum Anfang zurück springt. Problematisch allerdings vor allem für die BFP
Interferometrie kann sein, dass die Wellenfront des Gaußstrahls hinter dem AOD mit
Artefakten versehen ist, die das Tracking negativ beeinträchtigen können.
Das neue Verfahren könnte prinzipiell auch auf mehrere in Scanrichtung benachbarte
Partikel in einer Linienfalle angewendet werden. Das Trackingverfahren ist nicht limitiert
auf ein einziges Partikel in der Falle. In Kombination mit dem Trackingverfahren von
Speidel et al. [145] könnte etwa die hydrodynamische Wechselwirkung eines Nanorods
und eines Beads in einer Linienfalle untersucht werden.
Die gezeigte Methode zur Berechnung von Detektionssignalen eines Nanorods in einer
Linienfalle sollte auch anwendbar auf nicht geradlinige 1D Strukturen sein, wie sie von
Koch et al. [147] untersucht wurden. So ließen sich etwa Formabweichungen von
Nanostrukturen oder dynamische Konformationsänderungen von lebender Materie
feststellen.
104
6 Entwicklung einer Dunkelfeld-Linse
In diesem Kapitel wird das Prinzip der Dunkelfeld Mikroskopie vorgestellt, welche sich
als Streulicht-selektive Technik besonders zum Beobachten kleiner Strukturen eignet. So
konnten etwa Sönnichsen et al. [128] die Orientierung einzelner Nanorods bestimmen,
indem die polarisierte Lichtstreuung mit einem Dunkelfeld Mikroskop beobachtet wurde.
Die Kombination von optischen Fallen und Dunkelfeld Mikroskopie ist bekannt [148,
149]. Im Rahmen dieser Arbeit wurde eine Dunkelfeldeinheit konzipiert, welche in einen
optischen Fallenaufbau integriert und welche zudem parallel mit BFP Interferometrie
genutzt werden kann. Der Hauptteil des Kapitels beschreibt erstens die Konzeption der
Dunkelfeldeinheit, welche sich aus einer ringförmigen LED Beleuchtung und einer
speziellen Dunkelfeldlinse zusammensetzt. Zweitens wird auf die Fertigung der
Dunkelfeldlinse eingegangen, sowie auf verschiedene Tests eines Prototyps, deren
Ergebnisse besprochen und diskutiert werden. Abschließend wird ein Ausblick gegeben.
6.1 Prinzip der Dunkelfeld-Mikroskopie
Die Dunkelfeld-Mikroskopie ist eine Mikroskopietechnik zur Visualisierung von kleinen
und kontrastarmen Proben. Das Prinzip der Dunkelfeld-Mikroskopie nützt die
Lichtstreuung einer Probe. Die Beleuchtung ist dabei so eingestellt, dass nur das gestreute
Licht beobachtet wird [150]. Eine Probe erscheint hell vor dunklem Hintergrund. Abb.
6.1 zeigt schematisch den Beleuchtungsstrahlengang.
∆ OL = NAstop − NAOL
∆ Kond = NAKond − NAstop
Ei
∆ Kond , NA=0.07
2
Blende, NA=0.8
Kond, NA=0.95
Probe
Es
OL, NA=0.75
Ei
∆ OL , NA=0.025
2
Abb. 6.1 Prinzip der Dunkelfeldmikroskopie. Ein Kondensor (Kond) wird ringförmig
beleuchtet, indem der zentrale Teil eines kollimierten Beleuchtungsstrahls (Ei) mit einer
Blende geblockt wird. Den Aperturradien der Blende und des Kondensors entsprechen
numerische Aperturen (NA), welche größer sind (mit Redundanz), als die NA der
Objektivlinse. Dadurch werden die Strahlen, die unter hohen Winkeln in die Fokalebene
einfallen nicht von der Objektivlinse eingefangen, sondern ausschließlich das gestreute
Licht (Es) einer Probe. Die Ringbreite der Beleuchtung, sowie die Redundanzbreite ∆OL
sind in numerischen Aperturen anhand eines Zahlenbeispiels ausgedrückt und
eingezeichnet.
Der zentrale Teil der Beleuchtung wird mit einer Blende in der anregungsseitigen BFP
geblockt und eine ringförmige Beleuchtung verbleibt. Der Aperturradius der Blende
105
6 Entwicklung einer Dunkelfeld-Linse
entspricht dabei einer numerischen Apertur (NA), die größer ist als diejenige der
Objektivlinse. Die Beleuchtungsstrahlen, die unter hohen Winkeln in die Fokalebene
einfallen werden nicht von der Objektivlinse eingefangen. Das Bildfeld ohne Streuer
erscheint daher dunkel. Typischerweise wird ein spezieller Dunkelfeldkondensor
verwendet. Dieser muss eine höhere NA haben, als die Objektivlinse.
6.2 Konzeption einer Dunkelfeldeinheit
Die erste Herausforderung war ein Konzept für eine Dunkelfeldbeleuchtung zu finden,
die sich mit den vorliegenden Wasserimmersions-Objektiven umsetzten lässt. Diese
waren eine Detektionslinse (entspricht Kondensor in Abb. 6.1) mit NADL=1.0 und eine
Objektivlinse mit einer höheren numerischen Apertur von NAOL = 1.2, was einem
maximalen Auffangwinkel von ($c =64.5° entspricht. Mit dem Ziel, dass die hohe
numerische Apertur der Objektivlinse für eine hochauflösende Bildgebung ausgenützt
wird, folgt aufgrund von NADL<NAOL, dass eine Dunkelfeldbeleuchtung nicht durch die
Detektionslinse bereitgestellt werden kann. Eine Beleuchtungsoptik außerhalb der
Detektionslinse musste konzipiert werden, die sich zudem in den knappen Raum
integrieren lässt, welcher begrenzt ist durch das Breadboard der Detektionseinheit und
das Fenster der Nanostage, in dem sich zwischen den zwei gegenüberstehenden
Objektiven die Probe befindet, siehe Abb. 4.4 auf Seite 41. Daher musste eine kompakte
Lösung gefunden werden. Des Weiteren müssen die Beleuchtungsstrahlen unter
definierten Winkeln ( ¦ ($c in das Immersionswasser eingekoppelt werden, siehe
Abb. 6.2. Zudem wurde eine Beleuchtung mit weißem Licht für plasmonische
Partikelanregung anvisiert.
H2O
DL
DFL
2.5
2.4
AH
OL
Abb. 6.2 Detailausschnitt des optischen Aufbaus in Seitenansicht. Zentral im Bild zwischen
den zwei gegenüberstehenden Objektiven, Detektionslinse (DL) und Objektivlinse (OL), ist
die Probenkammer (grau) dargestellt, welche aus zwei Deckgläschen besteht, die durch
einen Abstandhalter (AH) voneinander getrennt sind. Die vertikale Linie markiert die
optische Achse. Der besseren Übersichtlichkeit wegen sind weitere Details nur in den
rechten Teil eingezeichnet. Es ist eine Klammer, welche die Probenkammer fixiert und der
Bereich, der mit Immersionswasser gefüllt ist, skizziert. Zudem ist ein unterer Teil der
Dunkelfeldlinse (DFL) mit einem Strahl der Dunkelfeldbeleuchtung eingezeichnet. Der
Arbeitsabstand der DL, sowie der Abstand der DFL zur Fokusebene sind in mm
angegeben.
Zur Umsetzung der Dunkelfeldeinheit wurde zum einen eine Dunkelfeldlinse (DFL)
konzipiert, welche die Detektionslinse umgibt und in welcher ein
Beleuchtungsstrahlengang geführt werden kann, der die gegebenen Randbedingungen
erfüllt. Als Linsenmaterial wurde Polymethylmethacrylat (PMMA, besser bekannt als
Plexiglas) festgelegt. Zum anderen wurden für die Beleuchtung LEDs ausgesucht, die in
Form eines konzentrischen Ringes um die DFL angeordnet werden können.
106
In Zusammenarbeit mit Prof. Dr. Herbert Gross (ehemals Zeiss Oberkochen, mittlerweile
Uni Jena), wurde eine Geometrie der Dunkelfeldlinse festgelegt. Zur Definition der
optischen Flächen führte Gross mit der Software Zemax ein Raytracing durch.
6.2.1
Raytracing
Es wurde eine Konfiguration gefunden, bei der der Beleuchtungsstrahl ausgehend von
einer LED waagrecht in die DFL eingekoppelt und innerhalb dieser dreifach umgelenkt
wird, um schließlich unter einem hohen Winkel zur optischen Achse in die
Probenkammer eintreten zu können, siehe Abb. 6.3. Der Chip der LED befindet sich in
einer Epoxidharzlinse. Die Leuchtfläche wurde als quadratisch mit einer Kantenlänge von
100µm angenommen mit einer Distanz von 5mm zum Scheitelpunkt der Epoxidharzlinse,
der wiederum 2mm von der Eintrittsfläche der DFL entfernt war. Weiterhin wurde
vorgesehen, das Eintrittsfenster durch eine direkt davor befindlichen Rechteckblende
(0.5mm hoch, 0.9mm breit) zu limitieren. Mit Eintritts- und Austrittsfläche hat die
Dunkelfeldlinse fünf optische Grenzflächen. Die Strahlausbreitung in Aufsicht (Abb.
6.3a) ist unproblematisch, das Licht wird in die Fokalebene fokussiert. Die kritische
Strahlausbreitung zeigt sich in Seitenansicht (Abb. 6.3b). Der größte und der kleinste
Winkel zur optischen Achse sind eingezeichnet.
Abb. 6.3 Strahlausbreitung der Dunkelfeldbeleuchtung. a) In Aufsicht: Die
Beleuchtungsstrahlen gehen von einem LED-Chip in einer Linse aus. Die fünf optischen
Grenzflächen der Dunkelfeldlinse sind beschriftet. b) Schnitt in Seitenansicht: Der größte
und der kleinste Winkel zur optischen Achse sind eingezeichnet. Überarbeitete Graphik,
Quelle: H. Gross.
107
6 Entwicklung einer Dunkelfeld-Linse
Konturen der Grenzflächen in Seitenansicht
Der Chip (die Leuchtfläche) ist plan. Als Radius für die Epoxidharzlinse wurde R=5mm
angenommen. Die Grenzflächen 1 bis 3 sind plan.
Die Grenzfläche 4 ist asphärisch, deren Kontur lässt sich mit einer Asphärengleichung
definieren.
y1_3 _ % /P
1 -1 11 b31_/P3%
U _ U . _ .
(6.1)
mit Scheitelradius P=40.04, konischer Konstane b=12.35 und asphärischer Parameter
U =2.47⋅10-5, . =-2.06⋅10-7.
Die Austrittsfläche ist sphärisch mit Radius R=8.
Die beim Raytracing definierten Raumlagen der optischen Grenzflächen können der Abb.
6.7 auf Seite 110 entnommen werden und wurden bei der Fertigung exakt übernommen.
Verspiegelung
Die optischen Grenzflächen 2-4 werden in Reflexion genutzt. Die Grenzflächen 2 und 3
reflektieren theoretisch aufgrund von Totalreflexion, siehe Abb. 6.4. Der kritische Winkel
der Totalreflexion beim Übergang von PMMA auf Luft ist f\A oðy /
/00 q Y42°, wobei nach Quelle: www.refractiveindex.info der Brechungsindex von
PMMA für unterschiedliche Wellenlängen im sichtbaren Spektralbereich folgende Werte
annimmt: nPMMA(λ=435.8nm) = 1.5025, nPMMA(λ=500nm) = 1.49651, nPMMA(λ=780nm) =
1.4846. Es wurde unpolarisiertes Licht angenommen.
RH q L
1.0
Totalreflexion PMMA - Luft
0.8
0.6
0.4
0.2
0
10
20
30
40
50°
Abb. 6.4 Reflektivitat P13 als Funktion des Einfallswinkels bei Übergang von PMMA auf
Luft. Der kritische Winkel der Totalreflexion ist eingezeichnet.
Durch den kleinen Einfallswinkel von 21.7° auf die Asphäre (siehe Abb. 6.3) ist die
Reflektivität an der Grenzfläche PMMA – Luft gering (<5%, siehe Abb. 6.7), was eine
Verspiegelung notwendig macht.
6.2.2
Beleuchtung mit LED als Weißlichtquelle
Als Weißlichtquelle wurde eine Nichia NSPW500GS-K1 ausgewählt mit 5mm
Standardgehäuse, wie in Abb. 6.5 dargestellt. Diese zeichnete sich aufgrund der hohen
Lichtstärke (30cd) und des kleinen Abstrahlwinkels (bei =15° ist die Intensität 13 auf
1/10 der Intensität in Vorwärtsrichtung abgefallen, siehe Abb. 6.5b) im Vergleich zu
sonstigen zu dem Zeitpunkt am Markt verfügbaren LEDs aus.
108
Abb. 6.5 LED-Weißlichtquelle. a) Schnittzeichnung mit Abmessungen in mm. b)
Abstrahlcharakteristik: Leuchtintensität 13 als Funktion des Winkels, auf
Vorwärtsrichtung normiert. c) Foto der LED mit Typ-Bezeichnung. Die vertikale Linie
deutet die Lage des Chips an. d) Abbildung der Leuchtfläche, die einen kreisrunden
Leuchtfleck mit einem darin zentral, schräg liegendem, hellen, blauen Rechteck
(Leuchtfläche des Chips) mit zwei dunklen Punkten (Bonddrähte) und einem gelblichen
äußeren Teil (Fluoreszenzschicht) aufweist. a,b Überarbeitete Graphiken, Quelle:
Datenblatt NSPW500GS-K1 - WHITE LED - NICHIA CORPORATION.
Zur Beleuchtung der Dunkelfeldlinse werden mehrere LEDs in regelmäßigen Abständen
in einem Ring gefasst, welcher die Dunkelfeldlinse konzentrisch umgibt, siehe Abb. 6.6.
In die ringförmige Halterung können mindestens 32 LEDs mitsamt Blenden integriert
werden. Somit wird eine radialsymmetrische Beleuchtung erzielt und die
Beleuchtungsstärke vervielfacht sich mit der Anzahl der LEDs.
Abb. 6.6 Ringförmige LED-Beleuchtung. Die Dunkelfeldlinse wird von mehreren LEDs
beleuchtet. Die LEDs sind radialsymmetrisch angeordnet und in einem Ring gefasst,
welcher die Dunkelfeldlinse konzentrisch umgibt.
109
6 Entwicklung einer Dunkelfeld-Linse
6.3 Fertigung der Dunkelfeldlinse
Die Herstellung von Prototypen der Dunkelfeldlinse aus „Plexiglas GS“ Stabmaterial der
Firma Evonik konnte mit einer Ultrapräzisions-Mikrofräse (UPM) am IMTEK in
Kooperation mit Prof. Dr. Claas Müller und Herrn Wölfle durchgeführt werden. Dabei
wurde ein Rohkörper (mit Geometrie der DFL und Aufmaß an den vorgesehenen
optischen Flächen) auf eine Spindel aufgespannt und rotiert. Ein Diamantfräser nahm
unter hoher Präzision das Aufmaß ab. Abb. 6.7 zeigt einen maßstabsgetreuen Schnitt in
Seitenansicht der Dunkelfeldlinse mit Längenangaben.
Abb.
6.7
Schnittzeichnung
der
Dunkelfeldlinse
in
Seitenansicht
mit
Beleuchtungsstrahlengang. Längenangaben in mm. Die Koordinaten der Auftreffpunkte
des Zentralstrahls auf die optischen Grenzflächen 1-5 sind gelb markiert. Zusätzlich sind
eine LED und zwei Blenden eingezeichnet. Überarbeitete Graphik, Quelle: M. Wölfle.
Abb. 6.8 Dunkelfeldlinse (DFL) mit Detektionslinse und Probenkammer. Die DFL
(halbtransparent dargestellt) ist ein rotationssymmetrischer Hohlkörper, der eine
Detektionslinse (mittig) umgibt, um Licht unter hohen Winkeln zur optischen Achse in die
Probenkammer (unten) einzukoppeln. Des Weiteren ist die Halterung (oben) der
Detektionslinse eingezeichnet und eine mögliche Halterung (oben rechts) der DFL.
110
Abb. 6.8 zeigt eine Pseudo3D Visualisierung der Dunkelfeldlinse mit gehaltertem
Detektionsobjektiv und Probenkammer.
Die Verspiegelung der Asphäre wurde am Imtek von Herrn Aatz (Lehrstuhl Mikrooptik)
vorgenommen, indem eine dünne Schicht (~30nm) Aluminium aufgedampft wurde.
Abb. 6.9 zeigt zwei Fotos des ersten Prototyps der Dunkelfeldlinse.
Abb. 6.9 Dunkelfeldlinse Prototyp I mit verspiegelter Asphäre.
6.4 Tests an Prototypen von Dunkelfeldlinsen
In diesem Abschnitt werden zunächst verschiedene Testexperimente beschrieben, die zur
Charakterisierung eines Prototyps durchgeführt wurden. Im Anschluss sind die daraus
resultierenden Ergebnisse zusammen gefasst.
Die Funktion der Dunkelfeldlinse (DFL) ist nur dann erfüllt, wenn alle Strahlen unter
höheren Winkeln zur optischen Achse herauskommen, als die Objektivlinse auffangen
kann. Insofern musste der emittierte Winkelbereich der DFL getestet werden. In Abb.
6.10 ist ein Testaufbau gezeigt. Zur Beleuchtung wurde ein kollimierter Laserstrahl
verwendet. Dieser passierte eine Rechteckblende (mit einem Laser aus Tonpapier
ausgeschnitten) und wurde so justiert, dass er senkrecht auf den Scheitelpunkt der
Eintrittsfläche der DFL auftraf. Auf einem Schirm wurde das Licht aus der DFL
aufgefangen.
Abb. 6.10 Testaufbau zur Bestimmung der Austrittswinkel der Strahlen aus der
Dunkelfeldlinse. a) Fotos von Testaufbau und Rechteckblende mit Abmessungen in mm.
b) Schirm mit Intensitätsverteilung von aus der Dunkelfeldlinse austretenden Strahlen. c)
Linienprofil der gemessenen Intensitätsverteilung. Die Position des minimal erlaubten
Winkels von 64.5° und ein zweiter Winkel sind eingezeichnet.
111
6 Entwicklung einer Dunkelfeld-Linse
Des Weiteren wurde die Lichteffizienz betrachtet, die sich aus dem Verhältnis ergibt von
in die DFL eingekoppelter Lichtintensität und der Lichtintensität, die nach der DFL zur
Beleuchtung der Probe bereit steht. Dazu wurde eine Kamera zum einen kurz hinter die
Rechteckblende gestellt, zum anderen kurz hinter die Austrittsfläche der DFL.
Drittens wurde die Rauigkeit der optischen Grenzflächen der Dunkelfeldlinse mittels
Weißlichtinterferometrie (kommerzielles Gerät, Firma Zygo) untersucht. Abb. 6.11 zeigt
ein Höhenprofil von einem Ausschnitt der Eintrittsfläche. Der Krümmungsradius der
Eintrittsfläche, welche auf der Mantelfläche der zylindrischen Dunkelfeldlinse liegt
wurde für die Darstellung in Abb. 6.11a herausgerechnet.
Abb. 6.11 Oberflächenrauigkeit von optischer Grenzfläche der Dunkelfeldlinse. a)
Höhenprofil eines Ausschnitts der Eintrittsfläche. Die Höhe ist farbkodiert. b) Zentrales
Linienprofil des Profils in a) von links nach rechts (entlang Scheitellinie). Der
Krümmungsradius wurde herausgerechnet.
Ergebnisse
1. Die gemessene Intensitätsverteilung auf dem Schirm zeigte, dass ein großer Teil der
Gesamtintensität auf Winkel verteilt war, welche kleiner als der minimal erlaubte Winkel
von 64.5° waren.
2. Die integrierten Pixelwerte der Bilder beider Kamerapositionen zum Bestimmen der
Lichteffizienz ergaben ein Verhältnis von etwa 1/500.
3. Aus der Messung der Oberflächenrauigkeit geht hervor, dass die optischen
Grenzflächen eine Rillenstruktur aufweisen. Aus dem Linienprofil (entlang der
Scheitellinie) kann eine maximale Höhendifferenz PV=0.149µm abgelesen werden.
6.5 Diskussion und Ausblick
Der getestete Prototyp I kann nicht als Dunkelfeldlinse verwendet werden, da
Lichtstrahlen aus verbotenen Winkeln kommen, welche von der Objektivlinse
aufgefangen würden. Das Hauptproblem war, dass die eingekoppelten Strahlen nicht den
gemäß Raytracing vorgesehenen Verlauf annahmen. Stattdessen wurde das eingekoppelte
Licht bereits an der rauen Eintrittsfläche gestreut. Dadurch entstand zum Teil
„vagabundierendes“ Licht, welches unvorhergesehene Wege ging. Der Streueffekt trat an
jeder der optischen Grenzflächen auf. Durch die starke Abweichung zum idealen
Strahlverlauf verfehlten Strahlen innerhalb der DFL zum Teil sogar die optischen
Grenzflächen. In Abb. 6.10b kann man gestreutes Licht sehen, welches etwa von den
112
Kanten der DFL ausgeht, die die Asphäre begrenzen oder den Kanten der Austrittsfläche
der DFL. Somit trat das gewünschte Licht zur Beleuchtung einer Probe nicht unter den
definierten Winkeln aus der DFL aus. Dies erklärt größtenteils die geringe Lichteffizienz
von 1/500. Die Ursache der rauen optischen Grenzflächen war fertigungsbedingt, da ein
technisches Problem mit der UPM vorlag. Es wurde förmlich eine Rillenstruktur in die
optischen Flächen gefräst, siehe Abb. 6.11a.
Zudem ging Licht aufgrund schlechter Reflektivität der verspiegelten Flächen verloren.
Die Verspiegelung war nicht beständig und löste sich zum Teil mechanisch oder
oxidierte. Es wurde angedacht die Verspiegelung extern von Spezialisten durchführen zu
lassen. Dazu wurde unter anderem das Fraunhofer IOF in Jena und S1Optics in Nürtingen
konsultiert. Es stellte sich heraus, dass die Verspiegelung sehr aufwendig ist. Zum einen
muss geometrisch bedingt eine dynamische Beschichtung vorgenommen werden, bei der
die DFL rotiert wird, so dass eine homogene Beschichtung entsteht. Zum anderen weist
PMMA sehr schlechte Hafteigenschaften auf. Dies hat zur Folge, dass eine dreifache
Beschichtung notwendig ist. Diese sieht erstens einen Haftvermittler (IOF hält Patent),
zweitens eine Metallisierung und drittens eine Passivierung vor. Des Weiteren ist eine
chemische Oberflächenvorbehandlung notwendig. Zur Metallisierung eignet sich etwa
Aluminium oder Silber. Zur Passivierung, um einer Oxidation vorzubeugen und einen
mechanischen Schutz zu bieten, könnte etwa Al2O3 oder SiO2 verwendet werden.
Alternativ könnte statt PMMA als Linsenmaterial Zeonex oder Topas verwenden werden,
welche vergleichbare optische Eigenschaften aufweisen und leichter zu beschichten sind.
Es stellte sich jedoch heraus, dass es schwierig werden kann Halbzeuge im gewünschten
Format zu bekommen, da das Material typischerweise als Granulat verkauft wird. Die
Herstellung von Halbzeugen mit homogenen optischen Eigenschaften (ohne Schlieren
oder Lufteinschlüsse) aus Granulat ist aufwendig.
Eine weitere Schwierigkeit birgt die Lichteinkopplung in die DFL. Da die Leuchtfläche
der zu Verfügung stehenden LEDs tatsächlich eine komplexere ist (siehe Abb. 6.5b), als
die theoretisch angenommene, quadratische Leuchtfläche mit 100µm Kantenlänge, muss
dafür gesorgt werden, dass ausschließlich die von Prof. Gross beim Raytracing
angenommenen definierten Strahlen in die DFL eingekoppelt werden. Als Lösung für
eine geeignete Lichteinkopplung bietet sich eine Anordnung aus zwei Blenden an, wie in
Abb. 6.7 gezeigt. Die zweite zusätzliche Blende direkt vor der LED limitiert in
Kombination mit der Rechteckblende den maximalen Divergenzwinkel der
Beleuchtungsstrahlen. Darüber hinaus gilt zu beachten, dass das Raytracing kaum eine
Winkelredundanz der Strahlen aus der DFL in die Fokusebene vorsieht. Der kleinste
Winkel zur optischen Achse mit theoretisch 64.6°, siehe Abb. 6.3, ist nur geringfügig
größer, als der größte Winkel (64.5°), den die Objektivlinse noch einfangen kann.
Der kommerzielle Ultrakondensor (NA1.2-1.4, Öl-Immersion) der Firma Carl Zeiss wird
hingegen in Kombination mit einem Objektiv mit maximaler numerischer Apertur von
NA=1.0 vom Hersteller empfohlen. Das entspricht für Öl-Immersion einem
Redundanzwinkel von >10°. Es muss also in Verbindung mit der konzipierten DFL damit
gerechnet werden, dass möglicherweise nicht die volle numerische Apertur des
vorliegenden Objektivs mit NA=1.2 ausgeschöpft werden kann. Gegebenenfalls muss in
einer detektionsseitigen BFP der Objektlinse entsprechend mit einer Irisblende
abgeblendet werden.
113
6 Entwicklung einer Dunkelfeld-Linse
Zuletzt wurden unter Variation von Einstellparametern bei der Fertigung mit der UPM
neue Prototypen angefertigt. Deren Charakterisierung kann in einer Fortführung an diese
Arbeit durchgeführt werden. Ein Vorbild für ein funktionelles und kompaktes Design der
Halterung und der elektronischen Verschaltung von LEDs zur Beleuchtung einer
funktionierenden Dunkelfeldlinse kann sich an kommerziell erhältlichen
Ringbeleuchtungen (z. B. Qioptiq, Edmund Optics) genommen werden.
Des Weiteren ist eine Reihe von Alternativen denkbar, um Dunkelfeld-Mikroskopie mit
dem optischen Pinzetten-Setup (Abschnitt 4.2) in Kombination mit einer
Detektionseinheit für BFP Interferometrie zu vereinen.
Einerseits ist eine Dunkelfeldeinheit zu erwägen, bei der die Beleuchtung mittels
optischer Fasern (speziell sogenannter lensed fibers) eingekoppelt wird, wie in Abb. 6.12
dargestellt.
1a
2
3
1b
4
5
7
1a Faser mit 1b Linse
2 Faserhalterung
3 Wasser
4 Beleuchtungstrahl
5 Streulicht von Probe
6 Objektiv
7 Deckgläschen
6
Abb. 6.12 Alternative Dunkelfeldbeleuchtung mittels optischer Fasern. Schnitt in
Seitenansicht von Dunkelfeldbeleuchtung und Objektivlinse.
Andererseits könnte die Fluoreszenzbeleuchtung genutzt werden, siehe Abb. 4.4. Hierzu
seien ein i) Durchlicht und ein ii) Auflichtmodus beschrieben. Eine beleuchtungsseitige,
konjugierte BFP der Objektivlinse müsste ringförmig ausgeleuchtet werden. i) Die
Objektivlinse würde mit NA=1.2 als Kondensor, die Detektionslinse mit NA=1.0 als
Objektivlinse fungieren und mit einer Kamera in der Detektionseinheit in einer
konjugierten Fokusebene würde detektiert werden. ii) Um die vorliegende
Mikroskopkamera zu nützen, könnte man stattdessen in einer detektionsseitigen BFP der
Objektivlinse mit einer Irisblende unter Reduzierung der numerischen Apertur die
Ringbeleuchtung abblenden.
114
7 Fazit und Ausblick
In dieser Arbeit wurden zwei sich ergänzende Methoden zum Tracking von Nanorods
entwickelt. Damit kann die Raumlage, bestehend aus der Position und der Orientierung
stäbchenförmiger Partikel bestimmt und zeitlich aufgelöst werden. Mit der Vision eine
drei dimensionale funktionelle Nanostruktur aufzubauen, konnten Nanorods bei
kontaktloser, optischer Manipulation erfolgreich positioniert, orientiert und abgesetzt
werden.
Zur optischen Manipulation und zum Tracken von Nanorods wurden ein komplexer
optischer Aufbau geplant und konstruiert. Die Kombination aus einer optischen Pinzette
und einer interferometrischen Detektionseinheit zum Auslesen der Brownschen
Bewegung eines gefangenen Partikels macht den Aufbau zu einem photonischen
Kraftmikroskop. ZnO Nanorods in Wasser mit Durchmessern von D≈0.1µm und Längen
von wenigen Mikrometern konnten sowohl mit einer Punktfalle, wie auch mit einer
Linienfalle gefangen werden. Ein Nanorod in einer Punktfalle orientierte sich dabei
entlang der optischen Achse, ein Nanorod in einer Linienfalle hingegen entlang der Achse
der Linienfalle. So kann ein Nanorod in vertikaler Richtung und in einer horizontalen
Ebene ausgerichtet und etwa als Baustein für eine gewünschte Struktur verwendet
werden. Zudem konnte das reversible Umschalten beider orthogonaler Ausrichtungen
eines optisch gefangenen Nanorods durch Wechseln der Fallenmodi gezeigt werden. In
einer optischen Falle gefangen könnte ein Nanorod als Hebel zum Ausüben eines
Drehmoments verwendet werden.
In einer theoretischen Untersuchung wurde ein Konzept entwickelt, wie die Position und
die Orientierung eines Nanorods in einer Punktfalle getrackt werden kann. Das Prinzip
nutzt die Interferenz von gestreutem und ungestreutem Licht in Vorwärtsrichtung, wie sie
gewöhnlich zum Tracken eines Kügelchens in einer optischen Falle genutzt wird. Erstens
wurde eine Verknüpfung zwischen beliebigen Raumlagen des asphärischen Streuers im
hoch fokussierten Feld und einem dazugehörigen Interferenzmuster in einer FourierEbene (hintere Brennebene, BFP) der Fokalebene erkannt. Die Streuung wurde mit
Fourier Optik und im Rahmen Bornscher Näherung berechnet. Zweitens wurde ein
Algorithmus definiert, mit dem sich aus den Intensitätsverteilungen der Interferenzmuster
fünf Signale extrahieren lassen, welche die Auslenkungen in 3D, sowie die axiale und
laterale Winkelauslenkung relativ zum Fokuszentrum abbilden. Die Positionssignale
werden dabei im Wesentlichen erhalten, wie beim Tracking eines Beads, jedoch werden
lokale Quadranten einer beschränkten Kreisfläche innerhalb der BFP ausgewertet. Aus
dem Schwerpunkt der Kreisfläche in der BFP kann die Orientierung gewonnen werden.
Eine Auswertung der Signale eines Glas Nanorods (0.1µm x 0.8µm) zeigte, dass eine
Kombination aus Translation und Winkelauslenkung des Nanorods zu einer Kopplung
der Signale führt. Der dadurch bedingte Fehler bei der Raumlagebestimmung ist im
Wesentlichen gering für kleine und wächst mit größeren Winkelauslenkungen des
Nanorods zur optischen Achse. Der Vorteil zur bisherigen Trackingmethode mittels BFPInterferometrie ist, dass zusätzlich zur Position die Orientierung eines Nanorods bestimmt
werden kann. Die neue Methode deckt das Tracking eines Beads mit ab und kann daher
als Erweiterung verstanden werden.
115
7 Fazit und Ausblick
Als Detektor wurde ein Sensor mit etwa 32x32 Pixeln vorgeschlagen, was eine hohe
zeitliche Auflösung ermöglichen soll, die über der von HochgeschwindigkeitsVideotracking liegt. Eine Verbesserung des Trackingverfahrens könnte erzielt werden,
indem die polarisationsabhängige Streuung bei der BFP-Interferometrie mit ausgenutzt
wird.
Weiterhin wurde ein zweites Trackingverfahren zur Raumlagebestimmung eines
Nanorods in einer Linienfalle erarbeitet und anhand eines Nachweisexperiments
präsentiert. Dabei scannt ein Laserfokus oszillierend über ein Nanorod in der Fokalebene.
Die Trackingsignale werden gemäß konventioneller BFP Interferometrie gemessen und
sind einer Fokusposition zuordenbar. Aus der Signalantwort eines Scans über den
näherungsweise 1D Streuer kann dessen Auslenkung relativ zum Zentrum der Linienfalle,
sowie dessen Auslenkwinkel aus der Fokalebene und dessen Auslenkwinkel zur Achse
der Linienfalle bestimmt werden. Die zeitliche Auflösung ist durch die Scanrate der
optischen Falle gegeben. Mit einem akusto-optischen Modulator können einige 10kHz
erreicht werden. Das kontinuierliche Auslesen der Trackingsignale an lokalen Stellen des
gefangenen
Objekts
ermöglicht
potentiell
das
Beobachten
dynamischer
Strukturveränderungen, vorausgesetzt die laterale Ausdehnung des Fokus ist viel kleiner,
als die Länge des gefangenen Objekts. Dies kann neben dem Feld der Nanotechnik auch
besonders interessant in den Lebenswissenschaften sein.
Die zwei neuen Trackingmethoden sind insofern komplementär, als die Ruhelagen der
untersuchten Nanorods in einer Punkt- und einer Linienfalle senkrecht aufeinander
stehen. In beiden Fällen können unter Annahme eines harmonischen Potentials bezüglich
einer Auslenkung bzw. einer Winkelauslenkung translatorische und rotatorische
Fallensteifigkeiten bestimmt werden. Verwendet man ein Nanorod als Sonde können im
Sinne eines photonischen Kraftmikroskops somit Kräfte und in Ergänzung dazu
Drehmomente gemessen werden.
Darüber hinaus wurde eine Linse für Dunkelfeld-Mikroskopie entwickelt. Im Rahmen
eines Kooperations-Projekts konnten zwei Generationen von Prototypen realisiert
werden. Die kompakte Linse ist mitsamt einer ringförmigen LED Beleuchtung dafür
ausgelegt in einen optischen Aufbau mit einer optischen Falle und einer
interferometrischen Detektionseinheit eingebaut zu werden, um ein photonisches
Kraftmikroskop mit einem Dunkelfeldmikroskop zu vereinen und deren Vorzüge zu
kombinieren. Die zwei Prototypen der ersten Generation konnten den optischen
Anforderungen nicht entsprechen. Mit Hilfe optischer Messverfahren wurden dafür
verantwortliche fertigungsbedingte Probleme erkannt. Diese lagen einerseits bei der
Fertigung des Linsenkörpers mit einer Ultrapräzisions-Mikrofräse (UPM) und
andererseits bei der notwendigen Verspiegelung der Dunkelfeldlinse. Der
Fertigungsprozess der UPM wurde optimiert und ein zweiter Satz Prototypen steht zur
Verfügung, der in einer Nachfolgearbeit getestet werden kann.
Die erfolgreiche Manipulation von Nanorods, sowie die ausgearbeiteten Methoden, um
die Raumlage eines stäbchenförmigen Partikels zu tracken und die Kombination mit
Dunkelfeld Mikroskopie können helfen gezielt mit einzelnen Nanopartikeln zu arbeiten.
So können diese lichtmikroskopisch beobachtet und wie Bausteine zusammengesetzt
werden.
116
117
8 Appendix
8.1 Abkürzungsverzeichnis
1D
ein dimensional
a. u.
willkürliche Einheiten (engl.: arbitrary units)
Abb.
Abbildung
AC
Autokorrelation (engl.: autocorrelation)
ATP
Adenosintriphosphat
BFP
hintere Brennebene (engl.: back focal plane)
DDA
diskrete Dipole Näherung (engl.: discrete dipole approximation)
DFL
Dunkelfeldlinse
DNA
Desoxyribonukleinsäure (engl.: deoxyribonucleic acid)
Gl.
Gleichung
LED
Leuchtdiode (engl.: light-emitting diode)
MSD
mittlere quadratische Verschiebung (engl.: mean square displacement)
NA
Numerische Apertur
NIR
Nahinfrarot
NR
Nanorod, stäbchenförmiges Nanopartikel (engl.: nanorod)
NT
Nanoröhrchen (engl.: nanotube)
NW
Nanodraht (engl.: nanowire)
PFM
photonisches Kraftmikroskop
PMMA
Polymethylmethacrylat
PS
Polystyrol
PSD
spektrale Leistungsdichte (engl.: power spectral density)
QPD
Quadranten Photodiode
RNA
Ribonukleinsäuren (engl.: ribonucleic acid)
SEM
Rasterelektronenmikroskop (engl.: scanning electron microscope)
UPM
Ultrapräzisions-Mikrofräse
UV
Ultraviolett
vs.
versus
119
8 Appendix
8.2 Setup: Bauteile und Spezifikationen
Name
Bauteil
Mikroskop
Firma
Zeiss
Art.Nr
Axiovert 200 Mat
Laser
Alphalas
MonopowerTM1064-10W-SM
Laserkopf
opt. Faser
λ/2 Plättchen
polarisierender
Strahlteilerwürfel
Strahlfalle
Spiegel
Alphalas,
Thorlabs
Corning
Thorlabs
Edmund
Optics
Eigenbau
LINOS
Hamamatsu
TEM
Thorlabs
LINOS
G8370
PDA-S
InGaAs Pin Photodiode
Att
BE 2..8x
Referenzdiode,
Vorverstärker
Absorber Filter
Strahlaufweiter
4401-359-000-20
AuM
Prisma
Thorlabs
MRA25-M01
ph
SM
Lochblende
Scanspiegel
Eigenbau
GSI
Beam-Expander 2-8x, Laser-line
λ=1064nm
rechtwinkliges Prisma,
goldbeschichtet, R>97% (0.8-2µm)
Rundloch, Ø 2,5 mm
VM500+, 4 mm, Silber beschichtet
SL
DC1
Scanlinse
Dichroitischer
Spiegel
Zeiss
Laser
Components
TLrear
DC2
Zeiss
Zeiss
OL63x
Tubuslinse
Dichroitischer
Spiegel
Objektivlinse
OL40x
Objektivlinse
Zeiss
TLcam
CCD1
Tubuslinse
Kamera
Zeiss
Zeiss
AxioCam MRm
CCD1
Kamera
Andor
Clara
λ/2
PBS
BT1
dM
RD
IO-K-1064-CO
HI1060
WPH05M-1064
NT48-577 (10 mm)
NT48-578 (15 mm)
G340761000
710-755701,
710-755711
15AZ106818,
ChargenNr 2070231
FT 495 (HE)
Zeiss
Spezifikation
invertiertes, motorisiertes
Lichtmikroskop
dreistufig verstärkter (seed laser,
Vorverstärker, Leistungsverstärker)
diodengepumpter Nd:YAG Laser,
cw, λ=1064nm, 8W mit Feedback
über Leistungs-verstärker, linear
polarisiert
nachgerüstet,
mit optischem Isolator
Single-Mode Faser
Verzögerungsplättchen, 0. Ordnung
TECHSPEC® Laser-line
polarisierender Strahlteilerwürfel
Rasierklingenstapel
Planspiegel mit dielektrischer
Beschichtung DLHS IR 1064nm
fSL = 52.5mm
Vis Transmission, NIR Reflektion
fTL rear = 138.4mm
Strahlteiler aus Filtersatz 38HE
„C-Apochromat“ 63x/1,20 W Korr
M27
„C-Apochromat“ 40x/1,20 W Korr
M27
fTLcam = 164.5mm
CCD Sensor Sony ICX285,
1388x1040 Pixel, Pixelgröße 6.45
µm, 12 bit.
CCD Sensor Sony ICX285,
1392x1040 Pixel, Pixelgröße 6.45
µm, 16 bit.
Probenpositionierer
Name
120
Bauteil
Microstage und
Nanostage
Firma
MCL
Art.Nr
Nano-View/M
300-3
Spezifikation
mit Feinverstellerschrauben
piezo-elektrische Nanostage mit
300µm max. Verfahrweg
Ansteuerung
Nanostage
MCL
Nano-DriveTM 3USB 20 3 - ISS
3 Achsen Ansteuerung, 20 bit
Detektionseinheit
Name
DL
Bauteil
Detektionslinse
Firma
Zeiss
Art.Nr
DC3
Dichroitischer
Spiegel
725dcspxr
λ/2
PBS3
λ/2 Plättchen
polarisierender
Strahlteilerwürfel
Strahlfalle
Achromat
Strahlteilerwürfel
Strahlteilerwürfel
Achromat
Achromat
Achromat
Absorber Filter
AHF
Analysetech
nik
Thorlabs
Spezifikation
W „Plan-Apochromat“ 40x/1,0 DIC
M27
Vis Transmission, NIR Reflektion
WPH05M-1064
Verzögerungsplättchen, 0. Ordnung
BT3
AC80
BS1
BS2
AC20
AC40
AC25
Att
QPD
CCD2
Quadrantenphotodio
de,
Vorverstärker
Kamera
Eigenbau
Thorlabs
Rasierklingenstapel
antireflexbeschichtete Achromaten
Thorlabs
Thorlabs
Thorlabs
Thorlabs
Achromat, antireflexbeschichtet
Achromat, antireflexbeschichtet
Achromat, antireflexbeschichtet
absorbierende Neutraldichte Filter,
650-1050nm
InGaAs Pin Photodiode
Hamamatsu,
TEM
NE03B,NE010B,
NE020B
G6849
Prosilica
GC1380H
CCD Sensor Sony ICX285,
1360x1040 Pixel, Pixelgröße 6.45 µm,
12 bit.
Bauteil
miniSupplyQuad
Firma
TEM
Art.Nr
NoiseEater 2.1
TEM
NIDAQ1
Datenwandlerkarte
NIDAQ2
Datenwandlerkarte
National
Instruments
National
Instruments
National
Instruments
Vicor
Spezifikation
Netzgerät mit Signal Ein- und
Ausgang für QuadrantenPhotodioden
StrahlleistungsstabilisierungsElektronik
Datenwandlerkarte (data aquiring
device)
Datenwandlerkarte (data aquiring
device)
Steckplatzleiste
Elektronik
Name
BNC Box
Netzteil für servo
driver
servo driver
GSI
NI-PCI-6133
NI-PCIe-6259
BNC-2110
FlatPACTM VIPU22-EXX
LightningTM
Digital Servo
Driver
2x75W
Elektronik zur digitalen Ansteuerung
der Scanspiegel, 16bit
Sonstiges
Name
Bauteil
Spektrometer
Firma
AVANTES
Leistungsmessgerät
Coherent
Art.Nr
AVASPEC-2048USB2
FieldMax II-TO
Spezifikation
CCD Sensor, Sony ILX554A, 2048
Pixel
thermische Leistungsmessung
121
8 Appendix
Sensor PM10
8.3 Viskosität von Wasser
Für die temperaturabhängige Viskosität á1[3 von Wasser stehen zwei unterschiedliche
empirische Formeln zur Verfügung. Für Raumtemperatur gilt á1[ 25°3 0.89 ∙
10\J Û/+% [151].
á 2.414 ∙ 10\% ∙ 10o%U1.2/1ªÓ%1J.%\AU
á 1.006Q \J.UU1ª\% 3/1AA3Óª3
3q
(8.1)
(8.2)
h H10-3 N sêm2L
h_Formel1
1.0
0.9
0.8
0.7
0.6
0.5
0.4
h_Formel2
40
60
80
100
T H°CL
Abb. 8.1 Temperaturabhängige Viskosität von Wasser. Viskosität η vs. Temperatur für
zwei unterschiedliche empirische Formeln.
122
8.4 Konturfunktionen und Formfaktoren
Nachfolgend sind die Konturfunktionen 1N3 und Formfaktoren ̃ 13 für verschiedene
Streuerformen (Streuer in Koordinatenursprung) aufgeführt.
Form des Streuers
Dimension
des Streuers
Punktstreuer
d=0
1N3 º1N3
̃ 13 1
Delta-Linie entlang
z
d=1
1N3 º1_3º1l3KQ
61/â3
̃ 13 âf
1b â/23
Zylinder
d =3
1N3 fK
1K/3KQ
61/â3
Konturfunktion
Formfaktor
̃ 13 1/23% A 1b /23
âf
1b â/23
b /2
Tabelle 8.1 Konturfunktionen 1N3 und Formfaktoren ̃ 13 für drei ausgewählte
Streuerformen (Streuer in Koordinatenursprung), mit Länge L, Durchmesser D. Es ist
K -_ % l % und b = bc% bp% , mit Besselfunktion A 1b /23 erster Ordnung, erster
Gattung.
Die circ-Funktion ist definiert als
fK
1K/3 = ?
1 , ^ããK Ý /2
0
6
(8.3)
wobei K -_ % l % . Sie definiert eine Kreisfläche mit Durchmesser D.
Die rect-Funktion ist definiert als
KQ
61/3 ?
1 , ^ãã|| Ý /2
0
6
(8.4)
Sie definiert eine 1D-Rechteckfunktion mit Breite b.
123
8 Appendix
8.5 Kicking Effekt
Speziell bei dynamischen Fallen, wie etwa der Linienfalle, kommt der Effekt des
Kickings hinzu. Fährt die Falle über das Objekt, so wird dieses in Bewegungsrichtung der
Falle ein Stück mitgezogen.
Grundsätzlich kann die Art der Bewegung eines Partikels in einer oszillierenden Falle
abhängig von dessen Geschwindigkeit v in drei Regime aufgeteilt werden [152]. Für
kleine v wird das Partikel in der Falle mitgeführt. Für mittlere v entkommt das Partikel
der Falle und wird von der wiederkehrenden Falle aufgegriffen. Für große v sieht das
Partikel ein effektives Potential innerhalb dessen es diffundieren kann.
Hierzu kurz eine anschauliche Erklärung mit Beispiel einer Punktfalle, die von links nach
rechts gescannt wird. Zunächst wird ein Partikel, das den Fokus von links sieht nach links
gezogen. Im klassischen Modell hat das Partikel eine Massenträgheit. Scannt der Fokus
weiter über das Partikel hinweg bewegt sich das Partikel entgegen der Scanrichtung.
Effektiv hat das Partikel die attraktive Kraft zum Fallenzentrum länger von links als von
rechts gesehen und bewegt sich damit im Gesamten ein Stück gegen die Scanrichtung.
Im tatsächlich vorliegenden stark überdämpften Fall kann die Partikelmasse
vernachlässigt werden. Das Partikel wird ab dem Zeitpunkt in dem es sich im
Fallenzentrum befindet ein Stück in Scanrichtung mitgeführt. Effektiv sieht das Partikel
die attraktive Kraft zum Fallenzentrum länger von rechts und wird ein Stück in
Scanrichtung ausgelenkt. Das wird als Kicking bezeichnet.
a)
Feff
m>0
b)
Feff
m→0
Abb. 8.2 Schematische Darstellung zum Kicking von Partikel in Linienfalle. a) Klassisches
Model, Partikel hat Masse m und wird effektiv gegen die Scanrichtung der Linienfalle
gezogen. b) Stark überdämpfter Fall, Masse von Partikel in viskosem Medium kann
vernachlässigt werden. Effektiv wird das Partikel in Scanrichtung gekickt.
124
8.6 Interferenz mehrerer Felder
Die Intensitätsverteilung, die bei der Interferenz zweier Felder entsteht, kann mit der
Zweistrahlinterferenzformel Gl. (2.14) berechnet werden. Sie besteht aus der Summe der
Betragsquadrate der Felder und einem Mischterm, dem Interferenzterm. Bei Interferenz
%
von N+1 Feldern ergibt sich eine Anzahl ∑Ð
ZA an Mischtermen, z. B. ∑ZA 1 2 3 Interferenzterme für drei Felder.
Die Intensitätverteilung für drei interferierende Felder lautet
|M MA M% |%
(8.5)
o|M |Q ¸| |MA |Q ¸9 |M% |Q ¸: qo|M |Q \¸| |MA |Q \¸9 |M% |Q \¸: q
(8.6)
|M |% |MA |% |M% |% 2|M ||MA |
1Δ¼ A 3 2|M ||M% |
1Δ¼ % 3
2|MA ||M% |
1Δ¼A% 3
(8.7)
mit Phasendifferenz Δ¼
¼ ¼ .
Für den Fall, dass die Beträge der N Streufelder M viel kleiner sind, als der des
einfallenden Feldes |M | ≫ M , mit j>0 gilt
Y 2|M ||MA |
1Δ¼ A 3 2|M ||M% |
1Δ¼ % 3
(8.8)
Es bleiben nur eine Anzahl Û 2 Mischterme übrig, die wesentlich zur
Intensitätsverteilung beitragen.
Für eine beliebige Anzahl N von Streuern, deren Interferenz untereinander
vernachlässigbar ist, folgt somit
%
Ð
M ∑Ð
ZA M Y 2|M | ∑ZAM
oΔ¼ q
(8.9)
Die Intensitätsverteilung kann also für kleine Streufeldbeträge dargestellt werden als
Summe der Mischterme aus Interferenzen des einfallenden Feldes mit einem Streufeld
und einem Offset, der Intensität des einfallenden Feldes.
125
8 Appendix
8.7 Schwerpunktbestimmung einer BFP-Intensitätsverteilung
0
Hier ist die Schwerpunktbestimmung einer Intensitätsverteilung ayy
obc , bp , q in der
BFPDL beschrieben, wie sie beim Tracking eines Zylinders in einem hoch fokussierten
Feld verwendet werden kann. Der Schwerpunkt sei
0
= obc , bp q = Rayy
obc , bp , qT
Es wird zum einen die Differenzintensitätsverteilung verwendet,
Schwerpunktberechnung (center of mass, CM) Offset-abhängig ist. Es sei
ayy obc , bp , q = aobc , bp , q Ia obc , bp q
(8.10)
da
die
(8.11)
mit Gesamtintensitätsverteilung aobc , bp , q, die von der Raumlage des Zylinders
}6 obc , bp q% des leeren Fokus.
abhängt und konstanter Intensitätsverteilung aI obc , bp q E
Zum anderen wird ein Schwellwertverfahren (thresholding) angewendet, um störende
Nebenmaxima des Interferenzmusters zu unterdrücken. Beides zusammen liefert
0
ayy
obc , bp , q, den Betrag der Differenzintensitätsverteilung mit Threshold
7ã0 .
Das Schwellwertverfahren wird nach folgender Vorschrift durchgeführt.
a
ob , b , q, ayy obc , bp , q 7ã0
0
ayy
obc , bp , q = ? yy c p
0,
6
7ã0 = Q \A ayy obc , bp , q
wobeiayy obc , bp , q
$c
$c
(8.12)
(8.13)
der Maximalwert von ayy obc , bp , q ist.
Die Bestimmung der bc Schwerpunktkomponente lässt sich folgendermaßen formulieren
0
1bc , 3T =
bc Rayy
0
1bc , 3bc Ibc Á ayy
0
Á ayy 1bc , 3Ibc
0
0
1bc , 3 = d ayy
ayy
obc , bp , qIbp
0
0
1bc , 3 die Projektion von ayy
wobei ayy
obc , bp , q auf die kx-Achse ist.
Die Berechnung der bp Schwerpunktkomponente funktioniert analog.
126
(8.14)
(8.15)
127
9 Literaturverzeichnis
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
Block, S.M., Making light work with optical tweezers. Nature, 1992. 360(6403): p. 493495.
Won, R. and A. Ashkin, How it all began. Nature Photonics, 2011. 5(6): p. 316-317.
Ashkin, A., Accerleration and Trapping of Particles by Radiation Pressure. Physical
Review Letters, 1970. 24(4): p. 156-&.
Ashkin, A., J.M. Dziedzic, J.E. Bjorkholm, and S. Chu, Observation of a single-beam
gradient force optical trap for dielectric particles. Optics Letters, 1986. 11(5): p. 288290.
Florin, E.L., J.K.H. Horber, and E.H.K. Stelzer, High-resolution axial and lateral
position sensing using two-photon excitation of fluorophores by a continuous-wave Nd
alpha YAG laser. Applied Physics Letters, 1996. 69(4): p. 446-448.
Florin, E.L., A. Pralle, J.K.H. Horber, and E.H.K. Stelzer, Photonic force microscope
based on optical tweezers and two-photon excitation for biological applications. Journal
of Structural Biology, 1997. 119(2): p. 202-211.
Pralle, A., M. Prummer, E.L. Florin, E.H.K. Stelzer, and J.K.H. Horber, Threedimensional high-resolution particle tracking for optical tweezers by forward scattered
light. Microscopy Research and Technique, 1999. 44(5): p. 378-386.
Ghislain, L.P. and W.W. Webb, Scanning-force microscope based on an optical trap.
Optics Letters, 1993. 18(19): p. 1678-1680.
Rohrbach, A., C. Tischer, D. Neumayer, E.L. Florin, and E.H.K. Stelzer, Trapping and
tracking a local probe with a photonic force microscope. Review of Scientific
Instruments, 2004. 75(6): p. 2197-2210.
Rohrbach, A., Switching and measuring a force of 25 femtoNewtons with an optical trap.
Optics Express, 2005. 13(24): p. 9695-9701.
Abbondanzieri, E.A., W.J. Greenleaf, J.W. Shaevitz, R. Landick, and S.M. Block, Direct
observation of base-pair stepping by RNA polymerase. Nature, 2005. 438(7067): p. 460465.
Dholakia, K., P. Reece, and M. Gu, Optical micromanipulation. Chemical Society
Reviews, 2008. 37(1): p. 42-55.
Grier, D.G., A revolution in optical manipulation. Nature, 2003. 424(6950): p. 810-816.
Neuman, K.C. and S.M. Block, Optical trapping. Review of Scientific Instruments, 2004.
75(9): p. 2787-2809.
Ashkin, A., Forces of a single-beam gradient laser trap on a dielectric sphere in the ray
optics regime. Biophysical Journal, 1992. 61(2): p. 569-582.
Mazolli, A., P.A.M. Neto, and H.M. Nussenzveig, Theory of trapping forces in optical
tweezers. Proceedings of the Royal Society of London Series a-Mathematical Physical
and Engineering Sciences, 2003. 459(2040): p. 3021-3041.
Neves, A.A.R., A. Fontes, L.d.Y. Pozzo, A.A. de Thomaz, E. Chillce, E. Rodriguez, L.C.
Barbosa, and C.L. Cesar, Electromagnetic forces for an arbitrary optical trapping of a
spherical dielectric. Optics Express, 2006. 14(26): p. 13101-13106.
Nieminen, T.A., V.L.Y. Loke, A.B. Stilgoe, G. Knoener, A.M. Branczyk, N.R.
Heckenberg, and H. Rubinsztein-Dunlop, Optical tweezers computational toolbox.
Journal of Optics a-Pure and Applied Optics, 2007. 9(8): p. S196-S203.
Jackson, J.D., Classical Electrodynamics. 3rd ed1999: John Wiley & Sons, Inc.
Simpson, S.H. and S. Hanna, First-order nonconservative motion of optically trapped
nonspherical particles. Physical Review E, 2010. 82(3).
129
9 Literaturverzeichnis
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
41.
42.
43.
44.
130
Simpson, S.H. and S. Hanna, Application of the discrete dipole approximation to optical
trapping calculations of inhomogeneous and anisotropic particles. Optics Express, 2011.
19(17): p. 16526-16541.
Loke, V.L.Y., T.A. Nieminen, N.R. Heckenberg, and H. Rubinsztein-Dunlop, T-matrix
calculation via discrete dipole approximation, point matching and exploiting symmetry.
Journal of Quantitative Spectroscopy & Radiative Transfer, 2009. 110(14-16): p. 14601471.
Rohrbach, A. and E.H.K. Stelzer, Trapping forces, force constants, and potential depths
for dielectric spheres in the presence of spherical aberrations. Applied Optics, 2002.
41(13): p. 2494-2507.
Rohrbach, A., Stiffness of optical traps: Quantitative agreement between experiment and
electromagnetic theory. Physical Review Letters, 2005. 95(16).
Beth, R.A., Mechanical Detection and Measurement of the Angular Momentum of Light.
Physical Review, 1936. 50(2): p. 115-125.
Goodman, J.W., Introduction to Fourier Optics, 2005, Roberts & Company Publishers.
Gittes, F. and C.F. Schmidt, Interference model for back-focal-plane displacement
detection in optical tweezers. Optics Letters, 1998. 23(1): p. 7-9.
Rohrbach, A. and E.H.K. Stelzer, Three-dimensional position detection of optically
trapped dielectric particles. Journal of Applied Physics, 2002. 91(8): p. 5474-5488.
Friedrich, L. and A. Rohrbach, Tuning the detection sensitivity: a model for axial
backfocal plane interferometric tracking. Optics Letters, 2012. 37(11): p. 2109-2111.
Reece, P.J., W.J. Toe, F. Wang, S. Paiman, Q. Gao, H.H. Tan, and C. Jagadish,
Characterization of Semiconductor Nanowires Using Optical Tweezers. Nano Letters,
2011. 11(6): p. 2375-2381.
Rohrbach, A., H. Kress, and E.H.K. Stelzer, Three-dimensional tracking of small spheres
in focused laser beams: influence of the detection angular aperture. Optics Letters, 2003.
28(6): p. 411-413.
Gittes, F. and C.F. Schmidt, Signals and noise in micromechanical measurements.
Methods in Cell Biology, Vol 55, 1998. 55: p. 129-156.
Dutra, R.S., N.B. Viana, P.A. Maia Neto, and H.M. Nussenzveig, Absolute calibration of
optical tweezers including aberrations. Applied Physics Letters, 2012. 100(13).
Viana, N.B., M.S. Rocha, O.N. Mesquita, A. Mazolli, P.A.M. Neto, and H.M.
Nussenzveig, Towards absolute calibration of optical tweezers. Physical Review E, 2007.
75(2).
Viana, N.B., A. Mazolli, P.A.M. Neto, H.M. Nussenzveig, M.S. Rocha, and O.N.
Mesquita, Absolute calibration of optical tweezers. Applied Physics Letters, 2006.
88(13).
Rohrbach, A. and E.H.K. Stelzer, Optical trapping of dielectric particles in arbitrary
fields. Journal of the Optical Society of America a-Optics Image Science and Vision,
2001. 18(4): p. 839-853.
Bohren, C.F. and D.R. Huffman, Absorption and Scattering of Light by Small Particles,
2004, Wiley-VCH.
Sheppard, C.J.R. and S. Saghafi, Electromagnetic Gaussian beams beyond the paraxial
approximation. Journal of the Optical Society of America a-Optics Image Science and
Vision, 1999. 16(6): p. 1381-1386.
Bareil, P.B. and Y. Sheng, Angular and position stability of a nanorod trapped in an
optical tweezers. Optics Express, 2010. 18(25): p. 26388-26398.
Novotny, L. and B. Hecht, Principles of Nano-Optics, 2006, Cambridge University Press.
Saleh, B.E.A. and M.C. Teich, Fundamentals of Photonics, 2007, Wiley.
Friedrich, L., Surface scanning using optically trapped probes, 2011, University of
Freiburg.
Feng, S.M. and H.G. Winful, Physical origin of the Gouy phase shift. Optics Letters,
2001. 26(8): p. 485-487.
Born, M. and E. Wolf, Principles of Optics, 2002, Cambridge University Press.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
64.
65.
66.
67.
Molloy, J.E. and M.J. Padgett, Lights, action: optical tweezers. Contemporary Physics,
2002. 43(4): p. 241-258.
Dienerowitz, M., M. Mazilu, and K. Dholakia, Optical manipulation of nanoparticles: a
review. Journal of Nanophotonics, 2008. 2.
Dholakia, K. and T. Cizmar, Shaping the future of manipulation. Nature Photonics, 2011.
5(6): p. 335-342.
Wang, J., Biomolecule-Functionalized Nanowires: From Nanosensors to Nanocarriers.
Chemphyschem, 2009. 10(11): p. 1748-1755.
Lee, S.-W., G. Jo, T. Lee, and Y.-G. Lee, Controlled assembly of In2O3 nanowires on
electronic circuits using scanning optical tweezers. Optics Express, 2009. 17(20): p.
17491-17501.
Sirbuly, D.J., M. Law, H.Q. Yan, and P.D. Yang, Semiconductor nanowires for
subwavelength photonics integration. Journal of Physical Chemistry B, 2005. 109(32): p.
15190-15213.
Pauzauskie, P.J. and P. Yang, Nanowire photonics. Materials Today, 2006. 9(10): p. 3645.
Yan, R., D. Gargas, and P. Yang, Nanowire photonics. Nature Photonics, 2009. 3(10): p.
569-576.
Soong, R.K., G.D. Bachand, H.P. Neves, A.G. Olkhovets, H.G. Craighead, and C.D.
Montemagno, Powering an inorganic nanodevice with a biomolecular motor. Science,
2000. 290(5496): p. 1555-1558.
Bonin, K.D., B. Kourmanov, and T.G. Walker, Light torque nanocontrol, nanomotors
and nanorockers. Optics Express, 2002. 10(19): p. 984-989.
Yang, P.D., Wires on water. Nature, 2003. 425(6955): p. 243-244.
Jamshidi, A., P.J. Pauzauskie, P.J. Schuck, A.T. Ohta, P.-Y. Chiou, J. Chou, P. Yang, and
M.C. Wu, Dynamic manipulation and separation of individual semiconducting and
metallic nanowires. Nature Photonics, 2008. 2(2): p. 85-89.
Rogers, J.A., Optoelectronic tweezers - Organizing nanowires. Nature Photonics, 2008.
2(2): p. 69-70.
La Porta, A. and M.D. Wang, Optical torque wrench: Angular trapping, rotation, and
torque detection of quartz microparticles. Physical Review Letters, 2004. 92(19).
Deufel, C., S. Forth, C.R. Simmons, S. Dejgosha, and M.D. Wang, Nanofabricated
quartz cylinders for angular trapping: DNA supercoiling torque detection. Nature
Methods, 2007. 4(3): p. 223-225.
Inman, J., S. Forth, and M.D. Wang, Passive torque wrench and angular position
detection using a single-beam optical trap. Optics Letters, 2010. 35(17): p. 2949-2951.
Shelton, W.A., K.D. Bonin, and T.G. Walker, Nonlinear motion of optically torqued
nanorods. Physical Review E, 2005. 71(3).
Di Leonardo, R., E. Cammarota, G. Bolognesi, H. Schaefer, and M. Steinhart, ThreeDimensional to Two-Dimensional Crossover in the Hydrodynamic Interactions between
Micron-Scale Rods. Physical Review Letters, 2011. 107(4).
Zhang, J., H.I. Kim, C.H. Oh, X.D. Sun, and H. Lee, Multidimensional manipulation of
carbon nanotube bundles with optical tweezers. Applied Physics Letters, 2006. 88(5).
Zhang, J., T.G. Kim, S.C. Jeoung, F. Yao, H. Lee, and X. Sun, Controlled trapping and
rotation of carbon nanotube bundle with optical tweezers. Optics Communications, 2006.
267(1): p. 260-263.
Marago, O.M., P.G. Gucciardi, F. Bonaccorso, G. Calogero, V. Scardaci, A.G. Rozhin,
A.C. Ferrari, P.H. Jones, R. Saija, F. Borghese, P. Denti, and M.A. Iati, Optical trapping
of carbon nanotubes. Physica E-Low-Dimensional Systems & Nanostructures, 2008.
40(7): p. 2347-2351.
Tan, S.D., H.A. Lopez, C.W. Cai, and Y.G. Zhang, Optical trapping of single-walled
carbon nanotubes. Nano Letters, 2004. 4(8): p. 1415-1419.
Plewa, J., E. Tanner, D.M. Mueth, and D.G. Grier, Processing carbon nanotubes with
holographic optical tweezers. Optics Express, 2004. 12(9): p. 1978-1981.
131
9 Literaturverzeichnis
68.
69.
70.
71.
72.
73.
74.
75.
76.
77.
78.
79.
80.
81.
82.
83.
84.
85.
86.
132
Yu, T., F.C. Cheong, and C.H. Sow, The manipulation and assembly of CuO nanorods
with line optical tweezers. Nanotechnology, 2004. 15(12): p. 1732-1736.
Agarwal, R., K. Ladavac, Y. Roichman, G.H. Yu, C.M. Lieber, and D.G. Grier,
Manipulation and assembly of nanowires with holographic optical traps. Optics Express,
2005. 13(22): p. 8906-8912.
Pauzauskie, P.J., A. Radenovic, E. Trepagnier, H. Shroff, P.D. Yang, and J. Liphardt,
Optical trapping and integration of semiconductor nanowire assemblies in water. Nature
Materials, 2006. 5(2): p. 97-101.
Nakayama, Y., P.J. Pauzauskie, A. Radenovic, R.M. Onorato, R.J. Saykally, J. Liphardt,
and P. Yang, Tunable nanowire nonlinear optical probe. Nature, 2007. 447(7148): p.
1098-U8.
van der Horst, A., A.I. Campbell, L.K. van Vugt, D.A.M. Vanmaekelbergh, M.
Dogterom, and A. van Blaaderen, Manipulating metal-oxide nanowires using counterpropagating optical line tweezers. Optics Express, 2007. 15(18): p. 11629-11639.
Ikin, L., D.M. Carberry, G.M. Gibson, M.J. Padgett, and M.J. Miles, Assembly and force
measurement with SPM-like probes in holographic optical tweezers. New Journal of
Physics, 2009. 11.
Pelton, M., M.Z. Liu, H.Y. Kim, G. Smith, P. Guyot-Sionnest, and N.E. Scherer, Optical
trapping and alignment of single gold nanorods by using plasmon resonances. Optics
Letters, 2006. 31(13): p. 2075-2077.
Toussaint, K.C., Jr., M. Liu, M. Pelton, J. Pesic, M.J. Guffey, P. Guyot-Sionnest, and
N.F. Scherer, Plasmon resonance-based optical trapping of single and multiple Au
nanoparticles. Optics Express, 2007. 15(19): p. 12017-12029.
Selhuber-Unkel, C., I. Zins, O. Schubert, C. Soennichsen, and L.B. Oddershede,
Quantitative optical trapping of single gold nanorods. Nano Letters, 2008. 8(9): p. 29983003.
Tong, L., V.D. Miljkovic, and M. Kall, Alignment, Rotation, and Spinning of Single
Plasmonic Nanoparticles and Nanowires Using Polarization Dependent Optical Forces.
Nano Letters, 2010. 10(1): p. 268-273.
Hoerner, F., M. Woerdemann, S. Mueller, B. Maier, and C. Denz, Full 3D translational
and rotational optical control of multiple rod-shaped bacteria. Journal of Biophotonics,
2010. 3(7): p. 468-475.
Wilson, B.K., M. Hegg, X. Miao, G. Cao, and L.Y. Lin, Scalable nano-particle assembly
by efficient light-induced concentration and fusion. Optics Express, 2008. 16(22): p.
17276-17281.
Neves, A.A.R., A. Camposeo, S. Pagliara, R. Saija, F. Borghese, P. Denti, M.A. Iati, R.
Cingolani, O.M. Marago, and D. Pisignano, Rotational dynamics of optically trapped
nanofibers. Optics Express, 2010. 18(2): p. 822-830.
Phillips, D.B., J.A. Grieve, S.N. Olof, S.J. Kocher, R. Bowman, M.J. Padgett, M.J. Miles,
and D.M. Carberry, Surface imaging using holographic optical tweezers.
Nanotechnology, 2011. 22(28).
Engstrom, D., M.C.M. Varney, M. Persson, R.P. Trivedi, K.A. Bertness, M. Goksor, and
I.I. Smalyukh, Unconventional structure-assisted optical manipulation of high-index
nanowires in liquid crystals. Optics Express, 2012. 20(7): p. 7741-7748.
Tirado, M.M., C.L. Martinez, and J.G. Delatorre, Comparison of theories for the
translational and rotational diffusion coefficients of rod-like macromolecules.
Applications to short DNA fragments. Journal of Chemical Physics, 1984. 81(4): p. 20472052.
Marago, O.M., P.H. Jones, F. Bonaccorso, V. Scardaci, P.G. Gucciardi, A.G. Rozhin, and
A.C. Ferrari, Femtonewton Force Sensing with Optically Trapped Nanotubes. Nano
Letters, 2008. 8(10): p. 3211-3216.
Broersma, S., Viscous force and torque constants for a cylinder. Journal of Chemical
Physics, 1981. 74(12): p. 6989-6990.
Happel, J. and H. Brenner, Low Reynolds Number Hydrodynamics, 1981, Berlin:
Springer.
87.
88.
89.
90.
91.
92.
93.
94.
95.
96.
97.
98.
99.
100.
101.
102.
103.
104.
105.
Carrasco, B. and J.G. de la Torre, Hydrodynamic properties of rigid particles:
Comparison of different modeling and computational procedures. Biophysical Journal,
1999. 76(6): p. 3044-3057.
Perrin, F., Mouvement Brownien d'un ellipsoide (II). Rotation libre et dépolarisation des
fluorescences. Translation et diffusion de molécules ellipsoidales. Journal De Physique Et
Le Radium, 1936. 7(1): p. 1-11.
Hansen, S., Translational friction coefficients for cylinders of arbitrary axial ratios
estimated by Monte Carlo simulation. Journal of Chemical Physics, 2004. 121(18): p.
9111-9115.
Gauthier, R.C., Theoretical investigation of the optical trapping force and torque on
cylindrical micro-objects. Journal of the Optical Society of America B-Optical Physics,
1997. 14(12): p. 3323-3333.
Gauthier, R.C., M. Ashman, and C.P. Grover, Experimental confirmation of the opticaltrapping properties of cylindrical objects. Applied Optics, 1999. 38(22): p. 4861-4869.
Rockstuhl, C. and H.P. Herzig, Calculation of the torque on dielectric elliptical cylinders.
Journal of the Optical Society of America a-Optics Image Science and Vision, 2005.
22(1): p. 109-116.
Borghese, F., P. Denti, R. Saija, M.A. Iati, and O.M. Marago, Radiation torque and force
on optically trapped linear nanostructures. Physical Review Letters, 2008. 100(16).
Ling, L., F. Zhou, L. Huang, and Z.-Y. Li, Optical forces on arbitrary shaped particles in
optical tweezers. Journal of Applied Physics, 2010. 108(7).
Li, J. and X. Wu, FDTD simulation of trapping nanowires with linearly polarized and
radially polarized optical tweezers. Optics Express, 2011. 19(21): p. 20736-20741.
Cao, Y., A.B. Stilgoe, L. Chen, T.A. Nieminen, and H. Rubinsztein-Dunlop, Equilibrium
orientations and positions of non-spherical particles in optical traps. Optics Express,
2012. 20(12): p. 12987-96.
Phillips, D.B., S.H. Simpson, J.A. Grieve, G.M. Gibson, R. Bowman, M.J. Padgett, M.J.
Miles, and D.M. Carberry, Position clamping of optically trapped microscopic nonspherical probes. Optics Express, 2011. 19(21): p. 20622-20627.
Simpson, S.H. and S. Hanna, Holographic optical trapping of microrods and nanowires.
Journal of the Optical Society of America a-Optics Image Science and Vision, 2010.
27(6): p. 1255-1264.
Simpson, S.H. and S. Hanna, Optical trapping of microrods: variation with size and
refractive index. Journal of the Optical Society of America a-Optics Image Science and
Vision, 2011. 28(5): p. 850-858.
Phillips, D.B., D.M. Carberry, S.H. Simpson, H. Schaefer, M. Steinhart, R. Bowman,
G.M. Gibson, M.J. Padgett, S. Hanna, and M.J. Miles, Optimizing the optical trapping
stiffness of holographically trapped microrods using high-speed video tracking. Journal
of Optics, 2011. 13(4).
Wongchoosuk, C., K. Subannajui, A. Menzel, I.A. Burshtein, S. Tamir, Y. Lifshitz, and
M. Zacharias, Controlled Synthesis of ZnO Nanostructures: The Role of Source and
Substrate Temperatures. Journal of Physical Chemistry C, 2011. 115(3): p. 757-761.
Johnson, J.C., H.Q. Yan, R.D. Schaller, P.B. Petersen, P.D. Yang, and R.J. Saykally,
Near-field imaging of nonlinear optical mixing in single zinc oxide nanowires. Nano
Letters, 2002. 2(4): p. 279-283.
Johnson, J.C., H.Q. Yan, P.D. Yang, and R.J. Saykally, Optical cavity effects in ZnO
nanowire lasers and waveguides. Journal of Physical Chemistry B, 2003. 107(34): p.
8816-8828.
Chan, S.W., R. Barille, J.M. Nunzi, K.H. Tam, Y.H. Leung, W.K. Chan, and A.B.
Djurisic, Second harmonic generation in zinc oxide nanorods. Applied Physics B-Lasers
and Optics, 2006. 84(1-2): p. 351-355.
Das, S.K., M. Bock, C. O'Neill, R. Grunwald, K.M. Lee, H.W. Lee, S. Lee, and F.
Rotermund, Efficient second harmonic generation in ZnO nanorod arrays with
broadband ultrashort pulses. Applied Physics Letters, 2008. 93(18).
133
9 Literaturverzeichnis
106.
107.
108.
109.
110.
111.
112.
113.
114.
115.
116.
117.
118.
119.
120.
121.
122.
123.
124.
125.
126.
134
Dutto, F., C. Raillon, K. Schenk, and A. Radenovic, Nonlinear Optical Response in
Single Alkaline Niobate Nanowires. Nano Letters, 2011. 11(6): p. 2517-2521.
Wang, F., P.J. Reece, S. Paiman, Q. Gao, H.H. Tan, and C. Jagadish, Nonlinear Optical
Processes in Optically Trapped InP Nanowires. Nano Letters, 2011. 11(10): p. 41494153.
Galajda, P. and P. Ormos, Complex micromachines produced and driven by light.
Applied Physics Letters, 2001. 78(2): p. 249-251.
Di Leonardo, R., A. Buzas, L. Kelemen, G. Vizsnyiczai, L. Oroszi, and P. Ormos,
Hydrodynamic synchronization of light driven microrotors. Physical Review Letters,
2012. 109(3): p. 034104-034104.
Kawata, S., H.B. Sun, T. Tanaka, and K. Takada, Finer features for functional
microdevices - Micromachines can be created with higher resolution using two-photon
absorption. Nature, 2001. 412(6848): p. 697-698.
MacDonald, M.P., L. Paterson, K. Volke-Sepulveda, J. Arlt, W. Sibbett, and K. Dholakia,
Creation and manipulation of three-dimensional optically trapped structures. Science,
2002. 296(5570): p. 1101-1103.
Palima, D., A.R. Banas, G. Vizsnyiczai, L. Kelemen, P. Ormos, and J. Gluckstad, Waveguided optical waveguides. Optics Express, 2012. 20(3): p. 2004-2014.
Hong, L., S.M. Anthony, and S. Granick, Rotation in suspension of a rod-shaped colloid.
Langmuir, 2006. 22(17): p. 7128-7131.
Misawa, H., K. Sasaki, M. Koshioka, N. Kitamura, and H. Masuhara, Multibeam laser
manipulation and fixation of microparticles. Applied Physics Letters, 1992. 60(3): p.
310-312.
Misawa, H., K. Sasaki, M. Koshioka, N. Kitamura, and H. Masuhara, Laser Manipulation
and Assembling of Polymer Latex Particles in Solution. Macromolecules, 1993. 26(2): p.
282-286.
Terray, A., J. Oakey, and D.W.M. Marr, Fabrication of linear colloidal structures for
microfluidic applications. Applied Physics Letters, 2002. 81(9): p. 1555-1557.
Carberry, D.M., S.H. Simpson, J.A. Grieve, Y. Wang, H. Schafer, M. Steinhart, R.
Bowman, G.M. Gibson, M.J. Padgett, S. Hanna, and M.J. Miles, Calibration of optically
trapped nanotools. Nanotechnology, 2010. 21(17).
Luis Hernandez-Pozos, J., W.M. Lee, L. Irais Vera-Robles, A. Campero, and K.
Dholakia, Controlled three-dimensional manipulation of vanadium oxide nanotubes with
optical tweezers. Applied Physics Letters, 2008. 93(24).
Lu, Z., C. Gao, Q. Zhang, M. Chi, J.Y. Howe, and Y. Yin, Direct Assembly of
Hydrophobic Nanoparticles to Multifunctional Structures. Nano Letters, 2011. 11(8): p.
3404-3412.
Wang, Y., Y. Wang, D.R. Breed, V.N. Manoharan, L. Feng, A.D. Hollingsworth, M.
Weck, and D.J. Pine, Colloids with valence and specific directional bonding. Nature,
2012. 491(7422): p. 51-55.
Gibson, G.M., J. Leach, S. Keen, A.J. Wright, and M.J. Padgett, Measuring the accuracy
of particle position and force in optical tweezers using high-speed video microscopy.
Optics Express, 2008. 16(19): p. 14561-14570.
Otto, O., J.L. Gornall, G. Stober, F. Czerwinski, R. Seidel, and U.F. Keyser, High-speed
video-based tracking of optically trapped colloids. Journal of Optics, 2011. 13(4).
Han, Y., A.M. Alsayed, M. Nobili, J. Zhang, T.C. Lubensky, and A.G. Yodh, Brownian
motion of an ellipsoid. Science, 2006. 314(5799): p. 626-630.
Colin, R., M. Yan, L. Chevry, J.F. Berret, and B. Abou, 3D rotational diffusion of
micrometric wires using 2D video microscopy. Epl, 2012. 97(3).
Mukhija, D. and M.J. Solomon, Translational and rotational dynamics of colloidal rods
by direct visualization with confocal microscopy. Journal of Colloid and Interface
Science, 2007. 314(1): p. 98-106.
Doi, M. and S.F. Edwards, The Theory of Polymer Dynamics, 1986, New York: Oxford
Univ. Press.
127.
128.
129.
130.
131.
132.
133.
134.
135.
136.
137.
138.
139.
140.
141.
142.
143.
144.
145.
146.
Xiao, L., Y. Qiao, Y. He, and E.S. Yeung, Three Dimensional Orientational Imaging of
Nanoparticles with Darkfield Microscopy. Analytical Chemistry, 2010. 82(12): p. 52685274.
Sonnichsen, C. and A.P. Alivisatos, Gold nanorods as novel nonbleaching plasmonbased orientation sensors for polarized single-particle microscopy. Nano Letters, 2005.
5(2): p. 301-304.
Chang, W.-S., J.W. Ha, L.S. Slaughter, and S. Link, Plasmonic nanorod absorbers as
orientation sensors. Proceedings of the National Academy of Sciences of the United
States of America, 2010. 107(7): p. 2781-2786.
Chang, W.-S., J.W. Ha, L. Slaughter, and S. Link, Plasmonic nanorod absorbers as
orientation sensors. Abstracts of Papers of the American Chemical Society, 2010. 239.
Cheong, F.C. and D.G. Grier, Rotational and translational diffusion of copper oxide
nanorods measured with holographic video microscopy. Optics Express, 2010. 18(7): p.
6555-6562.
Dixon, L., F.C. Cheong, and D.G. Grier, Holographic deconvolution microscopy for
high-resolution particle tracking. Optics Express, 2011. 19(17): p. 16410-16417.
Ohmachi, M., Y. Komori, A.H. Iwane, F. Fujii, T. Jin, and T. Yanagida, Fluorescence
microscopy for simultaneous observation of 3D orientation and movement and its
application to quantum rod- tagged myosin V. Proceedings of the National Academy of
Sciences of the United States of America, 2012. 109(14): p. 5294-5298.
Kukura, P., H. Ewers, C. Mueller, A. Renn, A. Helenius, and V. Sandoghdar, High-speed
nanoscopic tracking of the position and orientation of a single virus. Nature Methods,
2009. 6(12): p. 923-U85.
Yogesha, S. Bhattacharya, and S. Ananthamurthy, Characterizing the rotation of non
symmetric objects in an optical tweezer. Optics Communications, 2012. 285(10-11): p.
2530-2535.
Kress, H., E.H.K. Stelzer, and A. Rohrbach, Tilt angle dependent three-dimensionalposition detection of a trapped cylindrical particle in a focused laser beam. Applied
Physics Letters, 2004. 84(21): p. 4271-4273.
Volpe, G. and D. Petrov, Torque detection using Brownian fluctuations. Physical Review
Letters, 2006. 97(21).
Jones, P.H., F. Palmisano, F. Bonaccorso, P.G. Gucciardi, G. Calogero, A.C. Ferrari, and
O.M. Marago, Rotation Detection in Light-Driven Nanorotors. Acs Nano, 2009. 3(10): p.
3077-3084.
Irrera, A., P. Artoni, R. Saija, P.G. Gucciardi, M.A. Iati, F. Borghese, P. Denti, F. Iacona,
F. Priolo, and O.M. Marago, Size-Scaling in Optical Trapping of Silicon Nanowires.
Nano Letters, 2011. 11(11): p. 4879-4884.
Borghese, F., P. Denti, and R. Saija, Scattering from Model Nonspherical Particles, 2007,
Berlin: Springer.
Reece, P.J., S. Paiman, O. Abdul-Nabi, Q. Gao, M. Gal, H.H. Tan, and C. Jagadish,
Combined optical trapping and microphotoluminescence of single InP nanowires.
Applied Physics Letters, 2009. 95(10).
Greenleaf, W.J., M.T. Woodside, E.A. Abbondanzieri, and S.M. Block, Passive alloptical force clamp for high-resolution laser trapping. Physical Review Letters, 2005.
95(20).
Lyu, S.C., Y. Zhang, H. Ruh, H.J. Lee, H.W. Shim, E.K. Suh, and C.J. Lee, Low
temperature growth and photoluminescence of well-aligned zinc oxide nanowires.
Chemical Physics Letters, 2002. 363(1-2): p. 134-138.
Nambiar, R. and J.C. Meiners, Fast position measurements with scanning line optical
tweezers. Optics Letters, 2002. 27(10): p. 836-838.
Speidel, M., L. Friedrich, and A. Rohrbach, Interferometric 3D tracking of several
particles in a scanning laser focus. Optics Express, 2009. 17(2): p. 1003-1015.
Tränkle, B., M. Speidel, and A. Rohrbach, Interaction dynamics of two colloids in a
single optical potential. Physical Review E, 2012. 86(2): p. 021401.
135
9 Literaturverzeichnis
147.
148.
149.
150.
151.
152.
136
Koch, M. and A. Rohrbach, Object-adapted optical trapping and shape-tracking of
energy-switching helical bacteria. Nat Photon, 2012. 6(10): p. 680-686.
Pearce, K., F. Wang, and P.J. Reece, Dark-field optical tweezers for nanometrology of
metallic nanoparticles. Optics Express, 2011. 19(25): p. 25559-25569.
Prikulis, J., F. Svedberg, M. Kall, J. Enger, K. Ramser, M. Goksor, and D. Hanstorp,
Optical spectroscopy of single trapped metal nanoparticles in solution. Nano Letters,
2004. 4(1): p. 115-118.
Singer, W., M. Totzeck, and H. Gross, Handbook of Optical Systems - Physical Image
Formation - Vol 2, 2005, Wiley-VCH.
Atkins, P. and J. De Paulo, Physical Chemistry, 2009, Oxford University Press.
Faucheux, L.P., G. Stolovitzky, and A. Libchaber, Periodic forcing of a brownian
particle. Physical Review E, 1995. 51(6): p. 5239-5250.
Danksagung
An erster Stelle möchte ich mich bei Prof. Dr. Alexander Rohrbach für die
ausgezeichnete Betreuung während meiner Doktorarbeit bedanken. Alex sei Dank, dass
ich mich mit dem faszinierenden Thema der optischen Pinzetten auseinander gesetzt und
sehr viel gelernt habe, auf internationale Konferenzen fahren und in einem tollen Team
arbeiten durfte.
Ich danke Prof. Dr. Margit Zacharias dafür die Zweitkorrektur zu übernehmen. Vielen
Dank vor allem auch für die ZnO Nanorods, die ich von ihrem Lehrstuhl
Nanotechnologie bekommen durfte.
Besonderen Dank geht an Andreas Menzel vom Lehrstuhl Nanotechnologie für das
selbstlose Engagement mir ZnO Nanorods herzustellen. Wie hätte ich ohne Proben sonst
Experimente machen sollen?
Großen Dank möchte ich Dr. Lars Friedrich aussprechen, der von seinen enormen
Kenntnissen in Optik und Programmierung und vielem mehr gerne abgibt und von dem
ich in unserer gemeinsamen Zeit am BNP Lehrstuhl viel lernen konnte.
Danke für die großartige und relaxte Stimmung in unserem Vier-Mann-Büro.
Ich danke Philipp von Olshausen, als Kollegen und verdammt guten Freund für Tipps
und Tricks zur Arbeit und fürs Leben.
Ich danke Benjamin Landenberger, meinem Setup Partner, der mir immer bei MicPy
Problemen aushalf.
Ich danke Felix Kohler für erkenntnisreiche Diskussionen zur Optik, Streuung, Mathe,
Konstruktion und übers Wetter oder die Schneelage.
Vielen Dank für die gute Zeit am Lehrstuhl möchte ich auch noch Anne Rottler und
allen weiteren BNPlern aussprechen.
In Zusammenhang mit dem Projekt Dunkelfeldlinse danke ich
Prof. Dr. Herbert Gross für die gute Zusammenarbeit und das Raytracing.
Prof. Dr. Claas Müller, für die Kollaboration und die Bereitstellung der UPM zur
Fertigung von Prototypen.
Michael Wölfle für sein Engagement die trickreichen Linsenkörper tatsächlich zu fräsen.
Bernd Aatz für die Verspiegelung der ersten Prototypen und für die äußerst freundliche
und große Hilfe bei der Charakterisierung.
Khaled Aljasem für einen Kurs in Zemax Raytracing.
137