1 Tr5gheitstensor (Fortsetzung)
Werbung
")
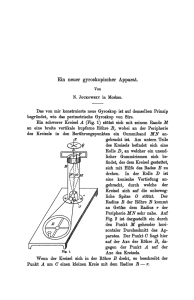
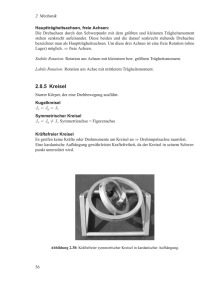
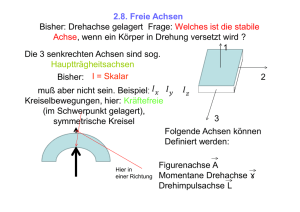
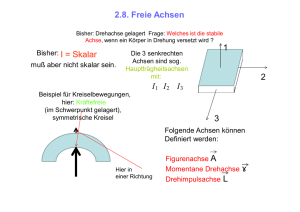
1 Trägheitstensor (Fortsetzung) Wir verallgemeinern den in der letzten Stunde gefundenen Trägheitstensor auf den Fall einer kontinuierlichen Massenverteilung durch die Einführung der Integration über das Körpervolumen: ~I = Z 0 B (~ r) @ y2 + z2 yx zx mit den Komponenten ~Ixx = ~Ixy = Z 1 xy xz C x2 + z 2 yz A dV zy x2 + y 2 y2 + z2 Z (~ r) dV; xz (~ r) dV; etc. Wie gesehen, stellt diese Matrix einen linearen Zusammenhang zwischen Drehimpuls und Winkelgeschwindigkeit her: ~ = ~I ! L ~: Diese Beziehung gilt in beliebigen Koordinatensystemen, allerdings verändern sich die Komponenten von ~I und von ! ~ dabei in genau de…nierter Weise. Matrizen, die solche physikalischen Zusammenhänge wiedergeben, nennt man "Tensoren" (genauer Tensoren 2.Stufe, Vektoren und Skalare sind entsprechend Tensoren 1. und 0. Stufe). Für die Rotationsenergie kann man durch komponentenweises schreiben ebenfalls einen entsprechenden Term …nden. Er lässt sich aber auch durch den Vergleich mit der entsprechenden Beziehung bei der linearen Bewegung motivieren, denn es gilt 1 1 1 Ekin = m 2 = m~ ~ = ~ p ~ 2 2 2 und man überträgt dies zu Erot = 1 ~ =1! ! ~ L ~ ~I ! ~: 2 2 Im Allgemeinen sind alle Komponenten von ~I von Null ~ in der verschieden, d.h. insbesondere auch, dass ! ~ und L Regel nicht parallel sind. Gibt es ein Koordinatensystem in dem ~I eine besonders einfache Form hat? Tatsächlich teilt uns die lineare Algebra mit, dass man jeden symmetrischen Tensor, d.h. die Komponenten von ~I erfüllen die Forderung ~Ijk = ~Ikj , durch geschickte Drehung des Koordinatensystems auf Diagonalform bringen kann, d.h. 0 1 Ia 0 0 C ~I 0 = B @ 0 Ib 0 A : 0 0 Ic Die Koordinatenachsen dieses Systems werden als Hauptträgheitsachsen bezeichnet, die Komponenten Ia; Ib; und Ic heissen Hautträgheitsmomente. Man sortiert sie nach aufsteigender Reihenfolge Ia Ib Ic : Sind alle Hauptträgheitsmomente verschieden, handelt es sich bei dem Körper um einen asymmetrischen Kreisel (z.B. Quader mit drei ungleich langen Seiten), sind zwei von ihnen gleich, spricht man von einem symmetrischen Kreisel (z.B. Zylinder) und wenn alle drei den gleichen Wert besitzen, ist es ein sphärischer Kreisel (Kugel, Würfel, Tetraeder, Oktaeder). Der Trägheitstensor eines sphä- rischen Kreisels besitzt die besonders einfache Form 0 1 1 0 0 C ~I 0 = I B @ 0 1 0 A 0 0 1 und reduziert sich damit quasi zu einem Skalar. Jeder rotationssymmetrsiche Körper ist ein symmetrischer Kreisel, aber nicht jeder symmetrische Kreisel ist rotationssymmetrisch (z.B. eine quadratische Säule). ~ parallel: In folgenden Spezialfällen sind ! ~ und L Rotation eines sphärischen Kreisels um eine beliebige Achse durch den Schwerpunkt Rotation des symmetrischen Kreisels um seine Symmetrieachse (Figurenachse) oder eine beliebige Achse senkrecht dazu (durch den Schwerpunkt) Rotation um eine Hautptträgheitsachse. ~ nicht parallel sind, wird die Bewegung des Wenn ! ~ und L Körpers bei der Rotation sehr viel komplizierter. 1. freie Rotation ohne äuß ere Kräfte (Drehmomente) In diesem Fall ist ~ fest im Raum die Drehimpulsachse L die momentane Drehachse ! ~ rotiert um die raum~ feste Achse von L im Falle eines symmetrischen Kreisels rotiert die ~ . Diese Bewegung Figurenachse ebenfalls um L der Figurenachse wird als Nutation bezeichnet. Wenn der Körper nicht frei rotiert sondern die Drehachse durch äuß ere Zwangsbedingungen, z.B. in einem Lager, stabilisiert wird, bedeutet dies, dass nun der Drehimpuls um ! ~ rotieren muss. Diese Änderung ~ muss gemäß von L d~ ~ L=M dt ~ , welche von den Ladurch äuß ere Drehmomente M gern aufzubringen sind, bewirkt werden. Solche "Unwuchten" müssen bei allen rotierenden Maschinenteilen vermieden werden, um einen schnellen Verschleiss der Lager zu unterbinden. Dazu werden die rotierenden Teile "ausgewuchtet" (z.B. Autoräder). Man unterscheidet zwischen der statischen Unwucht und der dynamischen Unwucht (Deviationsmoment) Eine statische Unwucht wird dadurch verursacht, dass die Drehachse nicht durch den Schwerpunkt verläuft. In diesem Fall tritt eine Zwangskraft auf, die die Fliehkraft Fz = m! 2RA aufgrund der Rotation des Schwerpunktes kompensieren muss. Die dynamischen Unwucht tritt durch eine ungleiche Massenverteilung auf, auch wenn der Schwerpunkt auf der Drehachse liegt: (a) Zylindrische Welle mit Deviationsmoment bezüglich der Zylinderachse durch zwei diametrale Nocken (b) Annulierung des Deviationsmomentes durch zwei entgegengesetzte Nocken (E.W. Otten, Repititorium der Experimentalphysik) Die Kräfte Ft führen zu einem rotierenden Drehmoment, welches an der Welle angreift und unangenehme Kräfte auf die Lager ausübt die mit dem Quadrat der Drehzahl anwachsen. Solche Drehmomente werden als Deviationsmomente bezeichnet und können ebenfalls durch Zusatzgewichte kompensiert werden. 2. Bewegung eines Kreisels beim Einwirken eines äuß eren Drehmomentes ~ weicht einer äuß Die Drehimpulsachse L eren Kraft senkrecht zu dieser aus (Grund: Das verursachte ~ =~ ~ und damit senkrecht Drehmoment ist M r F ~ ). Dies führt dazu, dass ein schief stehender zu F Kreisel, der nicht im Schwerpunkt unterstützt ist, im Gravitationsfeld präzediert, d.h. seine Figurenachse (Drehimpulsachse) beschreibt eine kreisförmige Bewegung (Präzession) um die Senkrechte (www.greiergreiner.at/hc/praezession.htm): Beispiele: Die Erdachse führt durch die Gezeitenkräfte der Sonne eine Präzessionsbewegung mit einer Periode von rund 26,000 Jahren aus. Die Präzessionsfrequenz des magnetischen Dipolmomentes eines Atomkerns um die Richtung eines angelegten Magnetfeldes wird bei der kernmagnetischen Resonanzspektroskopie gemessen. Da die exakte Frequenz von der chemischen Umgebung des Atoms abhängt, dient diese Methode zur Strukturaufklärung komplizierter organischer Moleküle. Satz von Steiner Das Trägheitsmoment eines Körpers um eine beliebige Achse im Abstand RA vom Schwerpunkt ist gleich dem Trägheitsmoment um eine parallele Achse durch den Schwerpunkt Is plus dem Produkt aus Masse m des Körpers 2 und RA 2: I (RA) = Is + m RA Aufgaben: 1. Ein senkrecht stehender starrer Stab der Länge `, dessen Dicke gegen seine Länge zu vernachlässigen sei, wird durch eine leichte Berührung zum Umfallen gebracht. Berechnen Sie die Geschwindigkeit und Beschleunigung des oberen Endes beim Aufschlag (Hinweis: bei Drehung der Stange um den Schw1 m`2 ). erpunkt gilt für das Trägheitsmoment I = 12 2. Berechnen Sie die Beschleunigung der Masse m2, wenn der Radius des Rades R und dessen Masse m ist. Die Rotation des Rades ist durch die Reibung des Seils bedingt. Die Reibung vom m1 auf der Unterlage werde vernachlässigt. (Zahlenbeispiel: m1 = 40 kg, m2 = 200 kg, m = 20 kg, R = 10 cm)