Optimale Steuerung ökonomischer Prozesse am Beispiel eines
Werbung

Westfälische Wilhelms-Universität Münster
Institut für numerische und instrumentelle Mathematik
Diplomarbeit
Optimale Steuerung ökonomischer
Prozesse am Beispiel eines
komplexen Unternehmensmodells mit
bang-bang, singulären Steuerungen
und Zustandsbeschränkungen
Nadja Balzer
Betreuer: Prof. Dr. H. Maurer
Februar 2006
Inhaltsverzeichnis
1 Einleitung
1
2 Theorie der optimalen Steuerprozesse
2.1 Formulierung optimaler Steuerprozesse . . . . . . . . . . . . . . . .
2.2 Äquivalente Umformungen eines Steuerprozesses . . . . . . . . . . .
2.2.1 Transformation eines Bolza-Problems auf ein MayerProblem . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2 Transformation einer freien Endzeit auf eine feste Endzeit .
2.2.3 Transformation nicht-autonomer Probleme auf autonome Probleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 Das Minimumprinzip von Pontryagin . . . . . . . . . . . . . . . . .
2.4 Probleme mit linear auftretender Steuerung - Bang-bang und singuläre Steuerungen . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
5
5
8
.
.
8
9
. 10
. 10
. 12
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
15
3.1 Grundbegriffe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Direkte Methode - Direct adjoining approach“ . . . . . . . . . . . . 18
”
3.3 Indirekte Methode - Indirect adjoining approach“ . . . . . . . . . . . 20
”
4 Hinreichende Optimalitätsbedingungen
24
4.1 Exkurs in die nichtlineare Optimierung . . . . . . . . . . . . . . . . . 24
4.2 Konvexe Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3 Hinreichende Optimalitätsbedingungen für unbeschränkte Steuerprozesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.4 Hinreichende Optimalitätsbedingungen für OSP mit Zustandsbeschränkungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5 Numerische Lösung optimaler Steuerprozesse mittels direkter Verfahren 37
5.1 Diskretisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2 Vor- und Nachteile der direkten Verfahren . . . . . . . . . . . . . . . 39
ii
Inhaltsverzeichnis
6 Das
6.1
6.2
6.3
6.4
6.5
modifizierte Modell von Lesourne und Leban
Beschreibung des Modells von Lesourne und Leban . . .
Formulierung des modifizierten Steuerungsproblems . . .
Auswertung des Minimumprinzips . . . . . . . . . . . . .
Numerische Ergebnisse . . . . . . . . . . . . . . . . . . .
Überprüfung der hinreichenden Optimalitätsbedingungen
7 Ein
7.1
7.2
7.3
7.4
komplexes Unternehmensmodell
Beschreibung des komplexen Unternehmensmodells . . . . . . . . .
Formulierung des komplexen Steuerungsproblems . . . . . . . . . .
Auswertung des erweiterten Minimumprinzips . . . . . . . . . . . .
Numerische Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.1 Optimale Steuerung des komplexen Unternehmensmodells bei
variierendem Preis . . . . . . . . . . . . . . . . . . . . . . .
7.4.2 Optimale Steuerung des komplexen Unternehmensmodells bei
konstantem Preis . . . . . . . . . . . . . . . . . . . . . . . .
7.4.3 Optimale Steuerung des komplexen Unternehmensmodells bei
Verdoppelung der Planungsperiode . . . . . . . . . . . . . .
8 Schlussbemerkung
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
41
41
44
45
48
57
.
.
.
.
61
61
66
68
71
. 71
. 84
. 92
99
A Beispieldateien: AMPL-Code
100
A.1 Komplexes Modell beim variierenden Preis mit Heun-Verfahren . . . 100
A.2 Komplexes Modell beim variierenden Preis mit Euler-Verfahren . . . 106
B Eidesstattliche Erklärung
112
C Danksagung
113
D Literaturverzeichnis
114
iii
Abbildungsverzeichnis
3.1
6.1
6.2
6.3
6.4
6.5
7.1
7.2
7.3
7.4
7.5
7.6
7.7
7.8
7.9
7.10
7.11
7.12
7.13
7.14
7.15
7.16
7.17
7.18
7.19
7.20
7.21
Zustandsbeschränkung xmin ≤ x(t) ≤ xmax
. . . . . . . . . . . 16
Die optimalen Steuerungen des modifizierten Modells . . . . . . . .
Die optimalen Trajektorien des modifizierten Modells . . . . . . . .
Die optimalen Adjungierten des modifizierten Modells . . . . . . .
Die Schaltfunktionen des modifizierten Modells . . . . . . . . . . .
Multiplikatorfunktion: (links) mittels IPOPT erhaltene µ(t), (rechts)
theoretisch ausgerechnete µ(t) . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
Die steigende Lohnkostenfunktion . . . . . . . . . . . .
Veranschaulichung des komplexen Unternehmensmodells
x1 bei variierendem Preis . . . . . . . . . . . . . . . . .
x3 bei variierendem Preis . . . . . . . . . . . . . . . . .
x5 bei variierendem Preis . . . . . . . . . . . . . . . . .
x2 bei variierendem Preis . . . . . . . . . . . . . . . . .
x4 bei variierendem Preis . . . . . . . . . . . . . . . . .
x6 bei variierendem Preis . . . . . . . . . . . . . . . . .
x7 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ2 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ4 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ1 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ3 beim variierenden Preis . . . . . . . . . . . . . . . . .
λ5 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ6 bei variierendem Preis . . . . . . . . . . . . . . . . .
u1 bei variierendem Preis . . . . . . . . . . . . . . . . .
u3 bei variierendem Preis . . . . . . . . . . . . . . . . .
λ7 bei variierendem Preis . . . . . . . . . . . . . . . . .
u2 bei variierendem Preis . . . . . . . . . . . . . . . . .
u4 bei variierendem Preis . . . . . . . . . . . . . . . . .
Σ1 bei variierendem Preis . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
iv
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
49
50
51
52
. 53
63
65
72
72
72
72
72
72
73
73
73
73
73
73
74
74
74
74
74
74
75
Abbildungsverzeichnis
7.22
7.23
7.24
7.25
7.26
7.27
7.28
7.29
7.30
7.31
7.32
7.33
7.34
7.35
7.36
7.37
7.38
7.39
7.40
7.41
7.42
7.43
7.44
7.45
7.46
7.47
7.48
7.49
7.50
7.51
7.52
7.53
7.54
7.55
7.56
7.57
7.58
7.59
Σ3 bei variierendem Preis . . . . . . . . . .
µ1 bei variierendem Preis . . . . . . . . . .
Σ2 bei variierendem Preis . . . . . . . . . .
Σ4 bei variierendem Preis . . . . . . . . . .
µ2 bei variierendem Preis . . . . . . . . . .
Variierende Preisfunktion p2 (t). . . . . . . .
Zinsfunktionen (links); Inflationsrate (rechts)
x1 bei konstantem Preis . . . . . . . . . . .
x3 bei konstantem Preis . . . . . . . . . . .
x5 bei konstantem Preis . . . . . . . . . . .
x2 bei konstantem Preis . . . . . . . . . . .
x4 bei konstantem Preis . . . . . . . . . . .
x6 bei konstantem Preis . . . . . . . . . . .
x7 bei konstantem Preis . . . . . . . . . . .
λ2 bei konstantem Preis . . . . . . . . . . .
λ4 bei konstantem Preis . . . . . . . . . . .
λ1 bei konstantem Preis . . . . . . . . . . .
λ3 bei konstantem Preis . . . . . . . . . . .
λ5 bei konstantem Preis . . . . . . . . . . .
λ6 bei konstantem Preis . . . . . . . . . . .
u1 bei konstantem Preis . . . . . . . . . . .
u3 bei konstantem Preis . . . . . . . . . . .
λ7 bei konstantem Preis . . . . . . . . . . .
u2 bei konstantem Preis . . . . . . . . . . .
u4 bei konstantem Preis . . . . . . . . . . .
Σ1 bei konstantem Preis . . . . . . . . . . .
Σ3 bei konstantem Preis . . . . . . . . . . .
µ1 bei konstantem Preis . . . . . . . . . . .
Σ2 bei konstantem Preis . . . . . . . . . . .
Σ4 bei konstantem Preis . . . . . . . . . . .
µ2 bei konstantem Preis . . . . . . . . . . .
x1 bei Verdoppelung der Planungsperiode .
x3 bei Verdoppelung der Planungsperiode .
x5 bei Verdoppelung der Planungsperiode .
x2 bei Verdoppelung der Planungsperiode .
x4 bei Verdoppelung der Planungsperiode .
x6 bei Verdoppelung der Planungsperiode .
x7 bei Verdoppelung der Planungsperiode .
v
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
75
75
75
75
75
77
83
85
85
85
85
85
85
86
86
86
86
86
86
87
87
87
87
87
87
88
88
88
88
88
88
93
93
93
93
93
93
94
Abbildungsverzeichnis
7.60
7.61
7.62
7.63
7.64
7.65
7.66
7.67
7.68
7.69
7.70
7.71
7.72
7.73
7.74
7.75
7.76
λ2 bei Verdoppelung der Planungsperiode
λ4 bei Verdoppelung der Planungsperiode
λ1 bei Verdoppelung der Planungsperiode
λ3 bei Verdoppelung der Planungsperiode .
λ5 bei Verdoppelung der Planungsperiode
λ6 bei Verdoppelung der Planungsperiode
u1 bei Verdoppelung der Planungsperiode
u3 bei Verdoppelung der Planungsperiode
λ7 bei Verdoppelung der Planungsperiode
u2 bei Verdoppelung der Planungsperiode
u4 bei Verdoppelung der Planungsperiode
Σ1 bei Verdoppelung der Planungsperiode
Σ3 bei Verdoppelung der Planungsperiode
µ1 bei Verdoppelung der Planungsperiode
Σ2 bei Verdoppelung der Planungsperiode
Σ4 bei Verdoppelung der Planungsperiode
µ2 bei Verdoppelung der Planungsperiode
vi
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
94
94
94
94
94
95
95
95
95
95
95
96
96
96
96
96
96
Tabellenverzeichnis
6.1
6.2
6.3
Liste der gewählten Parameter für modifiziertes Modell . . . . . . . . 45
Optimale Schaltstruktur des modifizierten Problems . . . . . . . . . 48
Schaltpunkte des modifizierten Problems . . . . . . . . . . . . . . . . 48
7.1
7.2
Liste der Parameter des komplexen Unternehmensmodells . . . . .
Vergleich der Rechenzeiten für unterschiedliche Parameter bei 5000
Diskretisierungspunkten. . . . . . . . . . . . . . . . . . . . . . . . .
Schaltstruktur der optimalen Steuerungen bei variierendem Preis .
Schaltstruktur der optimalen Steuerungen bei konstantem Preis . .
Schaltstruktur der optimalen Steuerungen bei variierendem Preis .
7.3
7.4
7.5
vii
. 68
.
.
.
.
71
76
89
97
1 Einleitung
Die Theorie der optimalen Steuerprozesse kann dem Oberbegriff Optimierung“ un”
tergeordnet werden, sie beschäftigt sich mit der Minimierung bzw. Maximierung
eines Leistungsmaßes in einem Zeitintervall unter Berücksichtigung bestimmter Nebenbedingungen. Einen wichtigen Teil dieser Nebenbedingungen bildet das dynamische System, welches einen realen Vorgang meist durch gewöhnliche Differentialgleichungen beschreibt. Durch die Einführung einer so genannten Steuerfunktion kann
auf die Dynamik des Prozesses von außen Einfluss genommen werden. Nicht zuletzt
dank dieser Eigenschaften gewinnen die Steuerprozesse in den unterschiedlichsten
Gebieten immer mehr an Bedeutung. Die Anwendung der Theorie der optimalen
Steuerprozesse findet man heute sowohl in der Medizin, Physik, Chemie als auch in
der Ökonomie.
In den Wirtschaftswissenschaften ist die Optimierung ein fester Bestandteil der Lehre. Im Laufe der letzten Jahrzehnte hat sich unter dem Namen Operations Research
ein eigenständiger Zweig, der sich unter anderem mit den Optimierungsproblemen
befasst, entwickelt. Zu den Aufgaben des Operations Research gehören:
• die Ermittlung relevanter Einflussgrößen für ein reales Problem,
• die Erstellung eines (typischerweise mathematischen) Modells, das ein vereinfachtes Abbild der Realität darstellt,
• das Lösen des Problems,
• die anschließende Auswertung der Ergebnisse.
Die meisten in Operations Research angewendeten Methoden sind statischer“ Art,
”
d. h. der zugrunde liegende Sachverhalt wird nur zu einem Zeitpunkt oder während
eines relativ kurzen Zeitintervalls ohne jegliche zeitliche Änderung betrachtet. Die
Vernachlässigung des dynamischen Elements in der wirtschaftlichen Planung zählt
jedoch zu den größten Nachteilen der besagten Methoden. Die Theorie der optimalen Steuerprozesse bietet dagegen das richtige Instrumentarium zur Behandlung
der Probleme, bei denen die Veränderung des Systems im Zeitablauf eine signifikante Rolle spielt. In der Ökonomie beschränkten sich die Berechnungen der optimalen Steuerung lange Zeit auf vergleichsweise einfache Modelle, die man analytisch
1
1 Einleitung
lösen konnte. Durch die Entwicklung leistungsfähigerer Verfahren, die auf modernen
Rechnern Aufgaben mit einer Vielzahl von Variablen und Nebenbedingungen mit
vertretbarem Aufwand lösen können, ist die Berechnung der optimalen Steuerung
für komplexe Modelle ermöglicht worden.
In dem hier behandelten Unternehmensmodell, das den Schwerpunkt der vorliegenden Arbeit bildet, geht es um solch einen komplexen optimalen Steuerprozess
aus dem Bereich des Unternehmenswachstums. Das komplexe Unternehmensmodell
wurde, ausgehend von dem Modell von Lesourne und Leban, von B. Koslik in ihrer
Diplomarbeit im Jahre 1994 aufgestellt. Die Problematik besteht darin ein Unternehmen mithilfe von Investitionen, Kreditauf-/abbau, gegebenenfalls Änderung des
Lagerbestandes und/oder der Anzahl der Beschäftigten so zu steuern, dass der Gewinn der Eigenkapitalgeber am Ende der Planungsperiode maximiert wird. Wie bei
den meisten ökonomischen Modellen sind auch hier bestimmte Ressourcen nur beschränkt verfügbar, z. B. sind die Beschaffung des Kapitals sowie die Lagerung der
Ware nur begrenzt möglich, außerdem dürfen die Zustandsvariablen nicht negativ
werden. Somit handelt es sich hier also um einen optimalen Steuerprozess mit reinen
Zustandsbeschränkungen.
Doch bevor man mit der Bearbeitung ausgewählter praxisbezogener Beispiele aus der
Wirtschaft beginnt, ist eine theoretische Basis der optimalen Steuerprozesse nötig.
Im zweiten Kapitel werden alle zur Formulierung und Lösung der unbeschränkten
Steuerprozesse benötigten Definitionen und Sätze vorgestellt. Diese beinhalten das
Pontryaginsche Minimumprinzip, welches die notwendigen Optimalitätsbedingungen
der optimalen Steuerprozesse darstellt. Darüber hinaus wird in Abschnitt 2.4 näher
auf die Prozesse mit linear auftretender Steuerung eingegangen. Bei solchen Problemen können zwei verschieden Arten der Steuerung vorkommen, nämlich bang-bang
Steuerungen und die singulären Steuerungen. Die bang-bang Steuerungen sind unstetig, sie nehmen nur Werte auf dem Rand des Steuerbereiches an. Die singulären
Steuerungen dagegen können einen beliebigen Verlauf innerhalb des zulässigen Steuerbereiches aufzeigen und sind schwerer zu bestimmen.
Die Bearbeitung von Steuerprozessen mit Zustandsbeschränkungen bedarf einiger
Erweiterungen der notwendigen Optimalitätsbedingungen der unbeschränkten Prozesse. Dabei spielt der Begriff der Ordnung einer Beschränkung eine wichtige Rolle.
In Rahmen dieser Arbeit werden zwei verschiedene Methoden zur Behandlung von
optimalen Steuerprozessen mit reinen Zustandsbeschränkungen beschrieben: die direkte und die indirekte Methode. Beide Verfahren führen auf die Begriffsbildung der
erweiterten Hamiltonfunktion zurück. Die direkte Methode ist dadurch gekennzeichnet, dass die Zustandsbeschränkung mit einem Multiplikator direkt an die Hamiltonfunktion angehängt wird. Bei der indirekten Methode wird erst die Beschränkung
2
1 Einleitung
solange total differenziert bis die Steuerungsvariable explizit in der Ableitung auftaucht und diesen Term koppelt man dann an die Hamiltonfunktion an. Die indirekte
Methode wird in der vorliegenden Arbeit hauptsächlich der Vollständigkeit halber
vorgestellt, zur Behandlung der praktischen Beispiele wird ausschließlich die direkte
Methode verwendet.
Mittels der notwendigen Optimalitätsbedingungen werden nur Kandidaten für das
Vorliegen eines Optimums bestimmt. Um sicher zu stellen, dass es sich bei der berechneten Lösung tatsächlich um eine Minimal- bzw. Maximalstelle handelt, ist man
auf hinreichenden Optimalitätsbedingungen angewiesen. Für viele Probleme wurde jedoch bis heute noch keine umfassende Theorie der hinreichenden Bedingungen entwickelt. So gibt es z. B. auch keine hinreichenden Kriterien, um die Lösung
des komplexen Unternehmensmodells prüfen zu können. Es existiert aber eine sehr
große Klasse der optimalen Steuerprozesse, bei denen gezeigt werden kann, dass
die notwendigen Optimalitätsbedingungen auch hinreichend sind. Dabei handelt es
sich, falls die Minimierung eines Zielfunktionals gefordert wird, um die so genannten
konvexen Probleme“. Diese sind in den ökonomischen Anwendungen besonders oft
”
vertreten, dazu zählt z. B. auch das modifizierte Modell. Aus diesem Grund wird in
Kapitel 4 erst der Begriff der Konvexität definiert und näher erläutert. Anschließend
werden die Beweise der hinreichenden Optimalitätsbedingungen unter zusätzlichen
Konvexitätsannahmen für unbeschränkte und zustandsbeschränkte Steuerprozesse
durchgeführt.
Aufgrund der Komplexität sind viele praktische Probleme analytisch nicht mehr
lösbar, wie z. B. komplexes Unternehmensmodell, welches in Kapitel 7 behandelt
wird. Deshalb wird in Kapitel 5 kurz die Vorgehnsweise bei numerischer Bearbeitung der optimalen Steuerprozesse erläutert.
Im Kapitel 6 wird zuerst ein von Lesourne und Leban (1978) entwickeltes Modell
vorgestellt. Dieses, aus dem Bereich des Firmenwachstums stammende Modell, verfolgt das Ziel den diskontierten Zahlungsstrom an Dividenden zu minimieren. Der
Zustand des Unternehmens wird durch das Eigenkapital und das Fremdkapital beschrieben. Dabei kann das dynamische System durch die Steuerungen, wie Beschäftigungsänderung, Investitionen und Dividendenzahlungen, beeinflusst werden. Den
Kern der vorliegenden Arbeit bilden die optimalen Steuerprozesse mit Zustandsbeschränkungen und linear eingehenden Steuerungen. Da aber eine der genannten
Steuerungen, nämlich die Beschäftigungsänderung im Ursprungsmodell von Lesourne und Leban nicht linear auftritt, wird das Beispiel in Abschnitt 6.2 ein wenig
verändert. In den nachfolgenden Abschnitten 6.3, 6.4 werden die notwendigen Optimalitätsbedingungen diskutiert und die optimale Lösung des modifizierten Problems
vorgestellt. Zudem wird in Abschnitt 6.5 gezeigt, dass dieses Beispiel die zusätzlichen
3
1 Einleitung
Konvexitätsannahmen erfüllt. Somit erweisen sich hier die notwendigen Bedingungen für ein Minimum als hinreichend.
Schließlich wird in Kapitel 7 das oben angesprochene komplexe Unternehmensmodell bearbeitet. Hier wird zunächst eine Lösung des Modells mit einem variierenden
Produktpreis bei zehnjähriger Planung, inklusive einer ausführlichen Diskussion der
Theorie, vorgestellt. Anschließend wird die Lösung bei konstantem Preis angegeben
und beide optimalen Strategien miteinander verglichen. Als Letztes wird geprüft
wie empfindlich die optimalen Trajektorien (am Beispiel mit variierendem Preis)
gegenüber einer Änderung der Planungszeitdauer sind. Anhand einer Analyse der
erhaltenen Ergebnisse wird veranschaulicht, dass dieses komplexe Unternehmensmodell sehr realitätsnahe und aussagekräftig ist.
Alle Beispiele in dieser Arbeit wurden mithilfe der beiden Optimierungssolver LOQO von Prof. R. J. Vanderbei und/oder IPOPT von A. Wächter und L. T. Biegler
bearbeitet. Eine CD mit den Kopien der entsprechenden Eingabedateien ist am Ende
der Arbeit beigefügt, außerdem findet man zwei ausgewählte Beispiele im Anhang.
4
2 Theorie der optimalen
Steuerprozesse
In diesem einführenden Kapitel werden in Anlehnung an Maurer [10] die wesentlichen Definitionen und Sätze der unbeschränkten optimalen Steuerprozesse bereitgestellt. Eine zentrale Rolle dabei spielt das Minimumprinzip von Pontryagin, welches die notwendigen Optimalitätsbedingungen für eine optimale Steuerung angibt.
Außerdem wird ein besonderer Schwerpunkt auf Probleme mit linear auftretender
Steuerung gelegt.
2.1 Formulierung optimaler Steuerprozesse
Betrachtet wird ein System, das durch n Differentialgleichungen erster Ordnung
bestimmt ist. Der Zustandsvektor
x(t) = (x1 (t), . . . , xn (t))T ∈ Rn
des Systems beinhaltet alle Variablen, welche das Verhalten des Systems auf dem
Zeitintervall [0, tf ] beschreiben. Die Endzeit tf wird, je nach Problemstellung, entweder fest vorgegeben oder fungiert als eine freie zusätzliche Variable. Durch den
Steuervektor
u(t) = (u1 (t), . . . , um (t))T ∈ Rm
kann der Zustand zu jedem Zeitpunkt t beeinflusst werden.
Definition 2.1.1 Das System von Differentialgleichungen
ẋ(t) =
dx(t)
= f (t, x(t), u(t))
dt
wird als Dynamik des Systems bezeichnet. Hierbei sei
f : [0, tf ] × Rn × Rm −→ Rn
stetige und bzgl. x ∈ Rn , u ∈ Rm stetig partiell differenzierbare Funktion.
5
(2.1)
2 Theorie der optimalen Steuerprozesse
Definition 2.1.2 Ein Funktionenpaar (x, u) mit x : [0, tf ] −→ Rn stückweise stetig
differenzierbar und u : [0, tf ] −→ Rm stückweise stetig heißt Lösung von (2.1), falls
gilt
dx(t)
= f (t, x(t), u(t))
ẋ(t) =
dt
für alle Stetigkeitsstellen t ∈ [0, tf ] von u(t).
In der Regel muss der Zustandsvektor x(t) an bestimmten Stellen gewisse Nebenbedingungen, etwa
x(ti ) ∈ Mti , ti ∈ [0, tf ], i = 1, . . . , k
(2.2)
mit abgeschlossenen Mengen Mti ⊂ Rn , erfüllen. In den praktischen Beispielen sind
diese häufig nur für den Anfangszustand x(0) und den Endzustand x(tf ) in der Form
von Gleichungen
M0 := {x ∈ Rn | ϕ(x) = 0}
Mtf := {x ∈ Rn | ψ(x) = 0}
mit den stetig differenzierbaren Funktionen ϕ : Rn → Rs , ψ : Rn → Rr , 0 ≤ s, r ≤ n
vorgegeben. Die Randbedingungen (2.2) bedeuten demnach:
ϕ(x(0)) = 0 ,
ψ(x(tf )) = 0
(2.3)
Für den Fall s = 0, bzw. r = 0 ergibt sich dann M0 = Rn , bzw. Mtf = Rn , dass also
x(0) bzw. x(tf ) frei ist. In den meisten Anwendungen treten jedoch die Randbedingungen in einer einfacheren Struktur auf, als so genannte Standard-Randbedingungen.
Definition 2.1.3 Die Randbedingungen der Form
x(0) = x0
,
ψ(x(tf )) = 0
(2.4)
mit x0 ∈ Rn fest, ψ : Rn → Rr wie oben, nennt man Standard-Randbedingungen.
Eine weitere wichtige Komponente eines optimalen Steuerprozesses bildet der Steuerbereich U , durch den für die Steuerung u der zulässige Wertebereich festgelegt
wird.
Definition 2.1.4 Eine nichtleere, konvexe und abgeschlossene Teilmenge U ⊂ Rm ,
die die zulässige Wertemenge für den Steuervektor
u(t) ∈ U
∀ t ∈ [0, tf ]
(2.5)
enthält, nennt man Steuerbereich.
Definition 2.1.5 Ein Funktionenpaar (x(·), u(·)) heißt zulässig zur Endzeit tf > 0,
wenn die Nebenbedingungen (2.1)-(2.5) erfüllt sind.
6
2 Theorie der optimalen Steuerprozesse
Schließlich wird durch das Zielfunktional die zu optimierende Größe eines optimalen
Steuerprozesses gegeben. Dabei wird in der Literatur je nach Verfasser unter opti”
miere“ entweder minimiere“ oder auch maximiere“ verstanden. In der vorliegenden
”
”
Arbeit handelt es sich jedoch stets um die Minimierung einer Funktion.
Definition 2.1.6 Die Funktion
F (x, u) := g (x(tf )) +
Z
tf
f0 (t, x(t), u(t)) dt
(2.6)
0
wird als Zielfunktional bezeichnet. Hierbei seien g : Rn → R stetig differenzierbar
und f0 : [0, tf ] × Rn × Rm → Rn stetige und bzgl. x ∈ Rn , u ∈ Rm stetig partiell
differenzierbare Funktionen.
Mit den obigen Bezeichnungen und Definitionen kann man nun einen optimalen
Steuerprozess in eine Kurzform zusammenfassen.
Definition 2.1.7 Kompakte Form eines Optimalen Steuerprozesses:
M inimiere F (x, u) := g (x(tf )) +
Z
tf
f0 (t, x(t), u(t)) dt
0
unter
dx(t)
= f (t, x(t), u(t))
dt
x(0) = x0 , ψ(x(tf )) = 0
ẋ(t) =
u(t)
∈
U
(2.7)
∀ t ∈ [0, tf ].
Definition 2.1.8 Ein zulässiges Paar (x∗ , u∗ ) zur einer festen Endzeit tf > 0 heißt
optimale Lösung bzw. globale Minimalstelle von (2.7), wenn
F (x∗ , u∗ ) ≤ F (x, u)
für alle zulässigen Paare (x, u) zur Endzeit tf gilt.
Ein zulässiges Paar (x∗ , u∗ ) zur einer freien Endzeit t∗f > 0 heißt optimale Lösung
bzw. globale Minimalstelle von (2.7), wenn
F (x∗ , u∗ ) ≤ F (x, u)
für alle zulässigen Paare (x, u) zu einer beliebigen Endzeit tf > 0 gilt. Hier ist tf
eine zusätzliche Optimierungsvariable.
Die Funktion x∗ (t) heißt optimale Trajektorie und die Funktion u∗ (t) optimale
Steuerung des Steuerprozesses (2.7).
7
2 Theorie der optimalen Steuerprozesse
2.2 Äquivalente Umformungen eines Steuerprozesses
In den bisherigen Betrachtungen wurden die Steuerprozesse in der so genannten
Bolza-Form eingeführt. In diesem Fall besteht das Zielfunktional aus zwei Komponenten: der Funktion g und dem Integral. Es gibt jedoch viele verschiedene Möglichkeiten zur Formulierung eines optimalen Steuerprozesses. Z. B. kann erreicht werden,
dass in dem Zielfunktional nur das Integral bzw. nur die Funktion g vorkommt. Dabei
spricht man von einem Lagrange-Problem bzw. von einem Mayer-Problem. Außerdem können Probleme mit freier Endzeit auf Probleme mit fester Endzeit zurückgeführt werden. Letztendlich kann jedes Steuerproblem in ein autonomes Problem
transformiert werden. Hierbei werden mit autonom diejenigen Prozesse bezeichnet,
die nicht explizit von der Zeit t abhängen. Häufig kann es von großem Nutzen sein,
ein Steuerproblem in eine andere Form zu transformieren. Aus diesem Grund werden
im Nachfolgenden einige Möglichkeiten zur Überführung eines optimalen Steuerprozesses in eine andere Darstellungsform aufgezeigt.
2.2.1 Transformation eines Bolza-Problems auf ein MayerProblem
Bei der Mayer-Form besteht das Zielfunktional nur aus dem Term g(x(tf )). Um diese Konstruktion zu bekommen muss demnach das Integral im Funktional eliminiert
werden. Dies erreicht man durch die Definition einer neuen Zustandsvariablen. Gegeben sei also der optimale Steuerprozess (2.7). Man definiere:
x0 (t) :=
Z
t
f0 (s, x(s), u(s))ds,
0 ≤ t ≤ tf ,
0
und erweitere den Zustandsvektor zu:
x̃(t) :=
x0 (t)
x(t)
!
∈ Rn+1 .
Das transformierte Problem lässt sich damit folgendermaßen in der gewünschten
Mayer-Form formulieren:
M inimiere
unter
g̃(x̃(tf )) = g(x(tf )) + x0 (tf )
dx̃(t)
= f˜(t, x̃(t), u(t)), t ∈ [0, tf ],
dt
x̃(0) = x̃0 , ψ̃(x̃(tf )) = 0,
u(t) ∈ U
∀ t ∈ [0, tf ].
8
(2.8)
2 Theorie der optimalen Steuerprozesse
Dabei gilt
f˜(t, x̃(t), u(t)) :=
x̃0 :=
0
x0
!
f0 (t, x, u)
f (t, x, u)
!
,
und ψ̃(x̃(tf )) := ψ(x(tf )).
2.2.2 Transformation einer freien Endzeit auf eine feste Endzeit
Gegeben sei ein optimaler Steuerprozess der Form (2.7) mit freier Endzeit tf .
Mit der Einführung einer neuen Zeitvariablen s ∈ [0, 1] durch:
t = s · tf ,
0 ≤ s ≤ tf .
werden die Zustands- und Steuervariablen in der Abhängigkeit von s folgendermaßen
definiert:
x̄(s) := x(s · tf ) = x(t) und ū(s) := u(s · tf ) = u(t).
Für die Dynamik des Systems erhält man daraus:
dx̄
dx dt
=
·
= f (s · tf , x̄(s), ū(s)) · tf
ds
dt ds
und für das Zielfunktional:
Z tf
Z
g(x(tf )) +
f0 (t, x(t), u(t))dt = g(x̄(1)) +
0
1
f0 (s · tf , x̄(s), ū(s))tf ds.
0
Zudem wird die freie Endzeit tf als zusätzliche Zustandsvariable durch
xn+1 (s) := tf
mit in die Dynamik aufgenommen. Für den erweiterten Zustandsvektor ergibt sich:
!
x̄(s)
x̃(s) :=
∈ Rn+1 .
tf
Insgesamt kann nun folgender optimaler Steuerprozess mit fester Endzeit sf = 1
formuliert werden:
Z 1
f˜0 (s, x̃(s), ũ(s)) ds
M inimiere
F̃ (x̃, ũ) = g̃(x̃(1)) +
0
unter
dx̃(s)
= f˜(s, x̃(s), ũ(s)), s ∈ [0, 1],
ds
x̃(0) = x̃0 , ψ̃(x̃(1)) = 0,
ũ(s) ∈ U
∀ s ∈ [0, 1].
9
(2.9)
2 Theorie der optimalen Steuerprozesse
Mit den Bezeichnungen
g̃(x̃(1)) := g(x̄(1)), f˜0 (s, x̃(s), ũ(s)) := tf · f0 (s · tf , x̄(s), ū(s)),
!
!
t
·
f
(s
·
t
,
x̄(s),
ū(s))
x
f
f
0
f˜(s, x̃(s), ũ(s)) :=
, x̃0 :=
, ξ frei
0
ξ
ũ(s) := ū(s),
ψ̃(x̃) := ψ(x̄).
2.2.3 Transformation nicht-autonomer Probleme auf autonome
Probleme
Ein nicht-autonomer Steuerprozess läßt sich in ein autonomes Problem umwandeln,
indem man die Zeitvariable t, die explizit in f0 oder f auftaucht, als zusätzliche
Zustandsvariable einführt. Mit dem neuen erweiterten Zustandsvektor
!
x(t)
x̃(t) :=
∈ Rn+1
t
erhält man folgenden autonomen Steuerprozess:
M inimiere
F̃ (x̃, ũ) = g̃(x̃(tf )) +
Z
tf
f˜0 (t, x̃(t), u(t)) dt
0
unter
dx̃(t)
= f˜(t, x̃(t), u(t)), t ∈ [0, tf ],
dt
x̃(0) = x̃0 , ψ̃(x̃(tf )) = 0,
u(t) ∈ U
(2.10)
∀ t ∈ [0, tf ]
mit
g̃(x̃) := g(x),
f˜(x̃, u) :=
f˜0 (x̃, u) := f0 (x̃n+1 , x̃, u),
!
!
f (x̃n+1 , x̃, u)
x0
, x̃0 :=
,
1
x̃n+1
ψ̃(x̃) := ψ(x).
2.3 Das Minimumprinzip von Pontryagin
Nachdem nun alle wichtigen Grundbegriffe und Bezeichnungen aufgelistet worden
sind, kann das Minimumprinzip von Pontryagin formuliert werden. Doch zuvor wird
noch folgende Definition benötigt.
Definition 2.3.1 Sei das Steuerproblem (2.7) gegeben. Des Weiteren sei λ0 ∈ R
und λ : [0, tf ] → Rn ein Zeilenvektor. Die Funktion
H (t, x(t), λ(t), u(t)) = λ0 f0 (t, x(t), u(t)) + λf (t, x(t), u(t))
10
(2.11)
2 Theorie der optimalen Steuerprozesse
wird als Hamilton-Funktion des Steuerprozesses (2.7) bezeichnet. Die Variablen
λi , i = 1, . . . , n werden als adjungierte Variablen oder Kozustand bezeichnet.
Bemerkung 2.3.2 Im Falle eines Steuerprozesses in Mayer-Form vereinfacht sich
die Hamilton-Funktion zu:
H (t, x(t), λ(t), u(t)) = λf (t, x(t), u(t)) .
(2.12)
Satz 2.3.3 (Minimumprinzip von Pontryagin) Sei (x*,u*) eine optimale Lösung
von (2.7). Dann gibt es eine Zahl λ0 ≥ 0, eine stetige und stückweise stetig differenzierbare Funktion λ : [0, tf ] → Rn und einen Zeilenvektor ν ∈ Rr mit (λ0 , λ(t), ν) 6= 0
für alle t ∈ [0, tf ], so dass die folgenden Aussagen gelten:
(i) An allen Stetigkeitsstellen t ∈ [0, tf ] von u∗ (t) gilt die Minimumbedingung:
H (t, x∗ (t), λ(t), u∗ (t)) = min H (t, x∗ (t), λ(t), u)
u∈ U
und die adjungierten Differentialgleichungen:
λ̇(t) = −Hx (t, x∗ (t), λ(t), u∗ (t)) .
(ii) Im Endzeitpunkt tf gilt die Transversalitätsbedingung:
λ(tf ) = λ0 gx (x∗ (tf )) + νψx (x∗ (tf )).
(iii) Im Falle einer freien Endzeit tf gilt für die optimale Endzeit tf ∗ :
H (tf ∗ , x∗ (tf ∗ ), λ∗ (tf ∗ ), u∗ (tf ∗ )) = 0.
(iv) Für autonome Probleme gilt außerdem:
H (x∗ (t), λ(t), u∗ (t)) ≡ const.
Für λ0 unterscheidet man zwischen λ0 = 0, dem so genannten abnormalen Fall und
λ0 > 0. Man rechnet leicht nach, dass in dem normalen Fall λ0 > 0 eine Skalierung
des Vektors (λ0 , λ) der Form (λ0 , λ) → (1, λλ0 ) keine Auswirkung auf die Aussagen
des Minimumprinzips hat. Man kann also, sofern λ0 > 0 gilt, die Bedingungen
aus Satz (2.3.3) durch Setzen von λ0 = 1 vereinfachen. Außerdem kann für den
Fall λ0 = 1 unter zusätzlichen Konvexitätsannahmen gezeigt werden, dass durch das
Pontryaginsche-Minimumprinzip auch eine hinreichende Bedingung für die Existenz
einer optimalen Lösung gegeben ist. Allerdings stellt sich der Nachweis von λ0 > 0
im Allgemeinen als problematisch dar. In einigen konkreten Anwendungen ist das
folgende Lemma vom großen Nutzen.
Lemma 2.3.4 Bei freiem Endzustand x(tf ), d. h., wenn formal ψ ≡ 0 gilt, ist
λ0 > 0, d. h. im Pontryaginschen Minimumprinzip kann λ0 = 1 gesetzt werden.
11
2 Theorie der optimalen Steuerprozesse
2.4 Probleme mit linear auftretender Steuerung Bang-bang und singuläre Steuerungen
Im Allgemeinen unterscheidet man in der Theorie der optimalen Steuerprozesse zwischen Problemen mit linear und nichtlinear auftretender Steuerung. Während bei
den Problemen mit linearer Steuerung diese häufig in einigen Punkten unstetig ist,
ist die optimale Steuerung bei nichtlinearen Prozessen stetig und für U = Rm sogar
eine C k -Funktion. Den Schwerpunkt der vorliegenden Arbeit bilden die Probleme
mit linear eingehender Steuerung (d. h. die Steuerung tritt sowohl in der Dynamik
als auch im Zielfunktional linear auf). Deshalb werden diese im nachfolgenden Abschnitt näher behandelt.
Es liegt also ein Problem der Form
Z tf
(a0 (t, x) + b0 (t, x)u) dt
M inimiere F (x, u) := g (x(tf )) +
0
unter
dx(t)
= a(t, x) + b(t, x)u
dt
x(t0 ) = x0 , ψ(x(tf )) = 0
ẋ(t) =
u(t)
∈
U
∀ t ∈ [t0 , tf ]
vor. Hierbei seien a0 ein Skalar, b0 ∈ Rm ein Zeilenvektor, a ∈ Rn , b eine (n × m)
Matrix und U ⊂ Rm konvex und kompakt. Für die zugehörige Hamiltonfunktion
mit λ0 = 1 ergibt sich dann:
H (t, x(t), λ(t), u(t)) = λ0 (a0 (t, x) + b0 (t, x)u) + λ(t)(a(t, x) + b(t, x)u)
= λ0 a0 (t, x) + λ(t)a(t, x) + [λ0 b0 (t, x) + λ(t)b(t, x)] u.
Eine bedeutende Rolle bei der Behandlung von optimalen Steuerprozessen mit linear
eingehender Steuerung spielt der Begriff der Schaltfunktion.
Definition 2.4.1 Die Funktion
Σ(t) := Hu (t, x(t), u(t), λ(t)) = λ0 b0 (t, x) + λ(t)b(t, x)
(2.13)
heißt Schaltfunktion.
Insbesondere kann man somit die Hamiltonfunktion folgendermaßen zusammenfassen
H(t, x(t), u(t), λ(t)) = λ0 a0 (t, x) + λ(t)a(t, x) + Σ(t)u
(2.14)
und man sieht, dass diese Funktion genau dann minimal bezüglich u wird, wenn
Σ(t)u minimal wird. Die Minimumbedingung
H (t, x∗ (t), λ(t), u∗ (t)) = min H (t, x∗ (t), λ(t), u)
u∈ U
12
2 Theorie der optimalen Steuerprozesse
ist somit äquivalent zu dem linearen Optimierungsproblem:
minimiere
{Σ(t)u | u ∈ U }
∀ t ∈ [0, tf ].
(2.15)
Aus Gründen der Vereinfachung beschränken sich alle weiteren Betrachtungen auf
den skalaren Fall m = 1, U = [umin , umax ] ∈ R (im Falle einer vektorwertigen
Steuerfunktion erfolgt die Auswertung komponentenweise). Die optimale Steuerung
kann direkt an der Schaltfunktion abgelesen werden, es gilt:
, Σ(t) > 0
umin
∗
u (t) =
(2.16)
umax
, Σ(t) < 0 .
unbestimmt , Σ(t) = 0
Definition 2.4.2 Sei [t1 , t2 ] ⊂ [0, tf ] mit t1 < t2
(i) Die Steuerung u(t) heißt bang-bang in [t1 , t2 ], wenn Σ(t) nur isolierte Nullstellen in [t1 , t2 ] hat, d. h. u(t) ∈ {umin , umax }. Die Nullstellen von Σ(t) heißen
Schaltpunkte.
(ii) Die Steuerung u(t) heißt singulär in [t1 , t2 ], wenn Σ(t) ≡ 0 auf dem gesamten
Intervall [t1 , t2 ] gilt.
Für Σ(t) 6= 0 liegt demnach eine bang-bang Steuerung vor, die gemäß (2.16) angegeben werden kann. Sobald jedoch singuläre Stücke auftreten, bedarf es weiterführender nachfolgender Überlegungen.
Es sei Σ(t) ≡ 0 für t ∈ [t1 , t2 ].
Man definiere rekursiv die Funktionen Σ(k) (t, x, λ, u), 0 ≤ k ≤ ∞ durch:
Σ(0) (t, x, λ, u) := Σ(t, x, λ),
∂ (k)
∂
∂ (k)
∂
∂
Σ (t, x, λ, u) +
Σ (t, x, λ, u) .
Σ(k+1) (t, x, λ, u) := Σ(k) (t, x, λ, u) +
∂t
∂x
∂t ∂λ
∂t
Entweder gilt dann
k > 0 mit
∂
Σ(k) (t, x, λ, u)
∂u
≡ 0 für alle k, 0 ≤ k ≤ ∞ oder es existiert ein
∂ (k)
Σ (t, x, λ, u) ≡ 0,
∂u
∂ (k)
Σ (t, x, λ, u) 6= 0.
∂u
für k = 0, . . . , k − 1
∂
Σ(k) (t, x, λ, u) eine Darstellung
Aufgrund der Linearität der Steuerung u gibt es für ∂u
der Form:
∂ (k)
Σ (t, x, λ, u) = A(t, x(t), λ(t)) + B(t, x(t), λ(t))u
∂u
mit geeigneten Funktionen A : [t1 , t2 ] × Rn × Rn → R und B : [t1 , t2 ] × Rn × Rn → R.
Außerdem gilt wegen
Σ(t, x, λ, u) ≡ 0
13
2 Theorie der optimalen Steuerprozesse
offensichtlich
Σ(k) (t, x, λ, u) ≡ 0.
Somit ergibt sich für die singuläre Steuerung:
using = −
A(t, x(t), λ(t))
B(t, x(t), λ(t))
für alle t ∈ [t1 , t2 ] mit B(t, x(t), λ(t)) 6= 0.
Satz 2.4.3 (Ordnung einer singulären Steuerung)
1. Gilt k < ∞, so ist k = 2q, q ∈ N+ eine gerade Zahl. Die Zahl q ≥ 1 heißt die
Ordnung der singulären Steuerung.
2. Für eine optimale Lösung (x(t), using (t), λ(t)) gilt die verallgemeinerte LegendreClebsch-Bedingung:
2q
d
q
q ∂
Hu (t, x(t), using (t), λ(t)) . (2.17)
0 ≤ (−1) B(t, x(t), λ(t)) = (−1)
∂u dt2q
Einen Beweis dieses Satzes findet man z.B. in Knobloch [6].
14
3 Optimale Steuerprozesse mit
reinen Zustandsbeschränkungen
Bisher wurden allgemeine Steuerprozesse und notwendige Optimalitätsbedingungen
für Probleme ohne Beschränkungen betrachtet. Doch in den meisten praktischen Anwendungen treten solche öfters im Zustandsbereich sowie in der gemischten Form,
im Zustands-Steuerbereich auf. Man unterscheidet demnach zwischen reinen Zustandsbeschränkungen und gemischten Beschränkungen. Für die vorliegende Arbeit
und die hier behandelten Beispiele aus der Unternehmenspolitik ist jedoch nur der
erste Typ der besagten Beschränkungen von Interesse. Bei solchen Steuerprozessen
können die Beschränkungen einen entscheidenden Einfluss auf die Optimalitätsbedingungen ausüben. Außerdem ist die Struktur der Lösung in der Regel komplexer.
Zur Bearbeitung der zustandsbeschränkten Steuerprozesse bedarf es des erweiterten
Pontryaginschen Minimumprinzips, welches in den Abschnitten 3.2 und 3.3 formuliert wird.
3.1 Grundbegriffe
Zunächst werden in diesem Abschnitt die Grundbegriffe und wichtige Definitionen
der optimalen Steuerprozesse mit reinen Zustandsbeschränkungen bereitgestellt.
Gegeben sei also ein optimaler Steuerprozess:
Z tf
f0 (t, x(t), u(t)) dt
M inimiere F (x, u) := g (x(tf )) +
0
dx(t)
= f (t, x(t), u(t))
unter ẋ(t) =
dt
x(0) = x0 , ψ(x(tf )) = 0
u(t)
∈
U
(3.1)
∀ t ∈ [0, tf ]
mit der reinen Zustandsbeschränkung
S(x(t)) ≤ 0,
t ∈ [0, tf ].
(3.2)
Dabei sei S : Rn → Rk , k ∈ N+ eine hinreichend oft stetig differenzierbare Funktion.
15
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
x(t)
xmax
Kontaktpunkt
Eintrittspunkt
Austrittspunkt
Verbindungspunkte
xmin
inneres
Teilstück
Randstück
ti
ti+1
ti+2
ti+3
ti+4
ti+5
ti+6
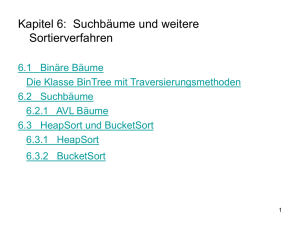
t
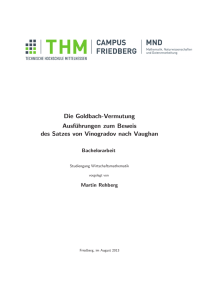
Abbildung 3.1: Zustandsbeschränkung xmin ≤ x(t) ≤ xmax
Bei der Lösung solcher Steuerprozesse unterscheidet man zwischen inneren Teilstücken
und Randstücken.
Definition 3.1.1 Ein Intervall [ti , ti+1 ] ∈ [0, tf ] wird inneres Teilstück genannt,
wenn
S(x(t)) < 0
∀ t ∈ [0, tf ]
(3.3)
gilt.
Per Definition ist die Zustandsbeschränkung auf inneren Teilstücken im gesamten
Zeitintervall nicht aktiv, daher gelten für die optimale Lösung die notwendigen Bedingungen von Satz (2.3.3). Wirklich interessant für dieses Kapitel sind also nur die
Probleme, in denen die Beschränkung (3.2) aktiv wird.
Definition 3.1.2 Die abgeschlossene Menge
I0 := { t ∈ [0, tf ] | S(x(t)) = 0 }
(3.4)
heißt Menge der aktiven Zeitpunkte.
Definition 3.1.3 Ein Intervall [te , ta ] ∈ [0, tf ] wird Randstück genannt, wenn
S(x(t)) ≡ 0
∀
t ∈ [te , ta ]
gilt. Der Zeitpunkt te heißt Eintrittspunkt, falls gilt
S(x(te − ε)) < 0 f ür ε > 0 hinreichend klein.
16
(3.5)
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
Der Zeitpunkt ta heißt Austrittspunkt, falls gilt
S(x(ta + ε)) < 0 f ür ε > 0 hinreichend klein.
Ein Punkt τ ∈ [0, tf ] heißt Kontaktpunkt, falls gilt
S(x(τ )) = 0,
S(x(τ ± ε)) < 0 f ür ε > 0 hinreichend klein.
Definition 3.1.4 Ein Eintritts- bzw. Austrittspunkt heißt Verbindungspunkt zwischen dem inneren Teilstück und dem Randstück.
Definition 3.1.5 Die Steuerung auf einem Randstück [te , ta ] wird als Randsteuerung bezeichnet.
Im Folgenden soll die Randsteuerung für den skalaren Fall m = 1 genauer untersucht
werden. Eine wichtige Rolle hierbei spielt die Ordnung der Zustandsbeschränkung.
Man definiere rekursiv die Funktionen S i , i ∈ N durch:
S 0 := S,
(3.6)
S i+1 := (S i )x f.
Definition 3.1.6 Die Zustandsbeschränkung S(x(t)) ≤ 0 heißt p-ter Ordnung
falls gilt:
∂S i
≡0
∂u
∂S p
6≡ 0.
=
∂u
(S i )u =
(S p )u
für i = 0, ..., p − 1
und
Anders ausgedrückt enthalten die ersten p − 1 totalen Ableitungen nach der Zeit t
keine Steuervariable, die Steuerung u tritt erstmals in der p-ten Ableitung explizit
auf, d. h.:
S i = S i (x)
S p = S p (x, u).
(3.7)
Daher gilt auf einem Randstück für alle t ∈ [te , ta ]:
S i (x(t)) = 0,
i = 0, . . . , p − 1
S p (x(t)) = 0.
(3.8)
Diese Bedingungen sind aufgrund des Eindeutigkeitssatzes für Differentialgleichungen äquivalent zu:
S i (x(te )) = 0,
i = 0, . . . , p − 1
S p (x(t)) = 0,
t ∈ [te , ta ].
17
(3.9)
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
Bevor nun die notwendigen Optimalitätsbedingungen für Steuerprozesse mit reinen
Zustandsbeschränkungen im nächsten Abschnitt formuliert werden, wird noch folgende Voraussetzung benötigt.
Voraussetzung 3.1.7
1. Die Gleichung S p (x, u) = 0 ist eindeutig auflösbar nach u = u(x) mit einer
C p+1 -Funktion u(x).
2. Auf jedem Randstück [te , ta ] gelte:
∂S p
(x, u) 6= 0,
∂u
∀ t ∈ [te , ta ].
3. Die Randsteuerung liege echt im Inneren des Steuerbereiches, d. h.:
u(t) ∈ int U,
∀ t ∈ [te , ta ].
Demnach gilt auf einem Randstück [te , ta ] eine eindeutige Beziehung u(t) = u(x(t)).
3.2 Direkte Methode - Direct adjoining approach“
”
Zur Behandlung von Problemen mit reinen Zustandsbeschränkungen existieren mehrere verschiedene Verfahren. Eine der meist angewandten Methoden, die in diesem
Abschnitt erläutert werden soll, ist die direkte Methode. Hierbei wird die Funktion
S(x(t)) mit einem Multiplikator versehen und direkt zur Hamiltonfunktion adjungiert.
Definition 3.2.1 Es seien das Steuerproblem (5.1), λ : [0, tf ] → Rn , λ0 ∈ R und
µ : [0, tf ] → Rk gegeben. Die Funktion
H̃ (t, x, λ, µ, u) = λ0 f0 (t, x, u) + λf (t, x, u) + µS(x)
(3.10)
H̃ (t, x, λ, µ, u) = H (t, x, λ, u) + µS(x)
heißt die erweiterte Hamilton-Funktion zum Steuerprozess (5.1).
Satz 3.2.2 (erweitertes Minimumprinzip)
Sei (x*,u*) eine optimale Lösung des zustandsbeschränkten Steuerprozesses (5.1).
Außerdem erfülle das Paar (x*,u*) die Voraussetzung (3.1.7). Dann existieren
1. eine Konstante λ0 ∈ R, λ0 ≥ 0,
2. stückweise stetige und stückweise stetig differenzierbare Funktion λ : [0, tf ] → Rn ,
18
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
3. ein Zeilenvektor ρ ∈ Rr ,
4. eine stückweise stetige Multiplikator-Funktion µ : [0, tf ] → Rk ,
5. in jedem Verbindungs- und Kontaktpunkt Multiplikatoren ν(ti ) ∈ R, ν(ti ) ≥ 0,
sodass folgende Aussagen gelten:
(i) An allen Stetigkeitsstellen t ∈ [0, tf ] von u∗ (t) gilt die Minimumbedingung:
H̃ (t, x∗ (t), λ(t), µ(t), u∗ (t)) = min H̃ (t, x∗ (t), λ(t), µ(t), u)
u∈ U
und die adjungierten Differentialgleichungen:
λ̇(t) = −H̃x (t, x∗ (t), λ(t), µ(t), u∗ (t)) .
(ii) Im Endzeitpunkt tf gilt die Transversalitätsbedingung:
λ(tf ) = λ0 gx (x∗ (tf )) + ρψx (x∗ (tf )) + γSx (x∗ (tf )),
γ ≥ 0,
γS(x∗ (tf )) = 0.
(iii) Für alle t ∈ [0, tf ] gilt die Vorzeichenbedingung:
µ(t) ≥ 0
und die Komplementaritätsbedingung:
µ(t)S(x∗ (t)) ≡ 0.
(iv) In jedem Verbindungs- und Kontaktpunkt gelten die Sprungbedingungen:
−
∗
λ(t+
i ) = λ(ti ) − ν(ti )Sx (x (ti )).
(v) Im Falle einer freien Endzeit tf gilt für die optimale Endzeit tf ∗ :
H̃ (tf ∗ , x∗ (tf ∗ ), λ∗ (tf ∗ ), µ∗ (tf ∗ ), u∗ (tf ∗ )) = 0.
Einen Beweis findet man in [11].
Für Probleme mit linear eingehender Steuerung lässt sich die optimale Steuerung
formal wie folgt berechnen:
Auf einem Randstück [te , ta ] ∈ [0, tf ] gilt nach Definition:
S(x(t)) = 0,
19
t ∈ [te , ta ].
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
Da S p (x, u) affin-linear in u ist, existiert eine Darstellung der Form:
S p (x, u) = α(x) + β(x)u
mit geeigneten Funktionen α(x) und β(x).
Außerdem gilt auf dem Randstück [te , ta ] nach Voraussetzung (3.1.7):
∂S p
(x, u) 6= 0,
∂u
∀ t ∈ [te , ta ]
und die Randsteuerung urand kann in Abhängigkeit von x ermittelt werden:
urand (x) = −
α(x)
.
β(x)
In dem Minimumprinzip wird vorausgesetzt, dass die optimale Steuerung auf einem
Randstück echt im Inneren des Steuerbereiches U liegt:
u(t) ∈ int U,
∀ t ∈ [te , ta ].
Nach der Minimumbedingung wird die Hamiltonfunktion im Optimum bezüglich der
Steuerung u minimiert. Dies impliziert:
0 = H̃(t) = Σ(t).
(3.11)
Die Randsteuerung verhält sich somit formal wie eine singuläre Steuerung.
Im Gegensatz zu unbeschränkten Problemen können bei den Steuerprozessen mit
Zustandsbeschränkungen Unstetigkeiten in den adjungierten Variablen auftreten.
Bei linear auftretender Steuerung kann der folgende Satz eine wichtige Rolle spielen.
Satz 3.2.3 Sei p = 1 und u(t) unstetig in einem Verbindungspunkt ti , dann gilt
ν(ti ) = 0. λ(t) ist also stetig in ti und es gilt Σ(ti ) = 0.
Einen Beweis findet man in Maurer [12].
3.3 Indirekte Methode - Indirect adjoining
”
approach“
Eine weitere Möglichkeit zur Auswertung zustandsbeschränkter Steuerprozesse bietet die indirekte Methode. Bei diesem Ansatz, der historisch gesehen älter als der Direkte ist, wird nicht die reine Beschränkung S(x(t)) ≤ 0 an die Hamilton-Funktion
angekoppelt, sondern die p-te Ableitung der Zustandsbeschränkung nach der Zeit
t, wobei p der Ordnung der Beschränkung entspricht. In dieser Arbeit werden die
notwendigen Bedingungen der indirekten Methode nur für den Fall p = 1 formuliert,
20
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
außerdem soll zur Vereinfachung die Steuerung u wieder skalar vorliegen.
Zunächst wird der in 3.2.1 eingeführte Begriff der erweiterten Hamilton-Funktion
modifiziert.
Definition 3.3.1 Es sei das Steuerproblem (5.1) mit der Zustandsbeschränkung
(3.2) der Ordnung p = 1 gegeben. Die Funktion
H 1 t, x, λ1 , µ1 , u
H1
= λ10 f0 (t, x, u) + λ1 f (t, x, u) + µ1 S 1 (x)
t, x, λ1 , µ1 , u = H t, x, λ1 , u + µ1 S 1 (x)
(3.12)
heißt die erweiterte Hamilton-Funktion der indirekten Methode zum Steuerprozess (5.1). Hierbei sind λ1 : [0, tf ] → Rn und µ1 : [0, tf ] → Rk .
Um den Zusammenhang zwischen den beiden Verfahren herzustellen, muss man
folgende Beziehungen zwischen den verwendeten Multiplikatoren beachten.
1. Die Multiplikatoren λ1 , µ1 aus 3.3 werden durch Integration der Multiplikatoren λ0 := λ und µ0 := µ aus dem Abschnitt 3.2 erzeugt.
2. Der Multiplikator λ1 (t) ist definiert durch:
λ1 (t) = λ0 (t) − µ1 (t)(S 0 )x (x(t)).
3. Für den Multiplikator µ1 gilt:
(
Rt
ν(ta ) + t a µ0 (s)ds, für t ∈ [te , ta ]
1
µ (t) =
0,
sonst.
(3.13)
(3.14)
4. Für den Multiplikator ν 1 gilt:
ν 1 (te ) = ν 0 (te ) + µ1 (te ).
(3.15)
Man beachte, dass hier angeführten Beziehungen zwischen den Multiplikatoren in
beide Richtungen gelten, d. h. wenn die Multiplikatoren der indirekten Methode
hinreichend glatt sind, können aus ihnen mittels der obigen Gleichungen die Multiplikatoren der direkten Methode gewonnen werden.
Mit den Bezeichnungen aus der Definition (3.3.1) lauten die notwendigen Optimalitätsbedingungen:
Satz 3.3.2 (erweitertes Minimumprinzip der indirekten Methode)
Sei (x*,u*) eine optimale Lösung des zustandsbeschränkten Steuerprozesses (5.1)
mit der Zustandsbeschränkung S(x(t) ≤ 0 der Ordnung p=1. Außerdem seien f und
S C 2 -Funktionen und die beiden folgenden Bedingungen erfüllt:
21
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
1. Auf jedem Randstück [te , ta ] gelte:
∂S 1 ∗ ∗
(x , u ) 6= 0,
∂u
∀ t ∈ [te , ta ].
2. Die Randsteuerung liege echt im Inneren des Steuerbereichs, d. h.:
u(t) ∈ int U,
∀ t ∈ [te , ta ].
Dann existieren
1. eine Konstante λ0 ∈ R, λ0 ≥ 0,
2. stückweise stetige und stückweise stetig differenzierbare Funktion λ1 : [0, tf ] → Rn ,
3. ein Zeilenvektor ρ1 ∈ Rr ,
4. eine stückweise stetige Multiplikator-Funktion µ1 : [0, tf ] → R,
5. in jedem Verbindungs- und Kontaktpunkt Multiplikatoren ν 1 (ti ) ∈ R, ν 1 (ti ) ≥ 0,
sodass folgende Aussagen gelten:
(i) An allen Stetigkeitsstellen t ∈ [0, tf ] von u∗ (t) gelten die Minimumbedingung:
H 1 t, x∗ (t), λ1 (t), µ1 (t), u∗ (t) = min H 1 t, x∗ (t), λ1 (t), µ1 (t), u
u∈ U
und die adjungierten Differentialgleichungen:
λ̇1 (t) = −Hx1 t, x∗ (t), λ(t)1 , µ1 (t), u∗ (t) .
(ii) Im Endzeitpunkt tf gilt die Transversalitätsbedingung:
λ1 (tf ) = λ10 gx (x∗ (tf )) + ρ1 ψx (x∗ (tf )),
(f alls
S(x∗ (tf )) < 0)
(iii) Für alle t ∈ [0, tf ] gilt die Komplementaritätsbedingung:
µ1 (t) ≥ 0,
µ(t)1 S(x∗ (t)) ≡ 0
und für alle t ∈ [te , ta ] die Vorzeichenbedingung:
µ1 (t) ≥ 0
∀ t ∈ [te , ta ].
(iv) In jedem Eintrittspunkt gilt die Sprungbedingung:
1 −
1
∗
λ1 (t+
e ) = λ (te ) − ν (te )Sx (x (ti )).
22
3 Optimale Steuerprozesse mit reinen Zustandsbeschränkungen
(v) In jedem Kontaktpunkt gilt:
λ1 (τ + ) = λ1 (τ − ) − νk1 Sx (x∗ (τ )),
νk1 ≥ 0.
(vi) In jedem Austrittspunkt gilt die Stetigkeitsbedingung:
1 −
λ1 (t+
a ) = λ (ta ).
(vii) Im Falle einer freien Endzeit tf gilt für die optimale Endzeit tf ∗ :
H 1 tf ∗ , x∗ (tf ∗ ), λ1 (tf ∗ ), µ1 (tf ∗ ), u∗ (tf ∗ ) = 0.
Einen Beweis hierzu findet man in Maurer [11] und Hartl, Sethi und Vickson [4].
Im Gegensatz zum direkten Ansatz gilt die Sprungbedingung für die adjungierten
Variablen beim indirekten Ansatz nur in den Eintrittspunkten. Demnach ist die
adjungierte Funktion λ1 (t) bei der Anwendung der indirekten Methode in den Austrittspunkten stetig.
23
4 Hinreichende
Optimalitätsbedingungen
Durch das Minimumprinzip von Pontryagin und dessen Erweiterung auf die Probleme mit Beschränkungen werden notwendige Optimalitätsbedingungen für das Vorliegen einer Extremalstelle gegeben. Um nachweisen zu können, dass es sich bei der
berechneten Lösung tatsächlich um ein Optimum handelt, werden die hinreichenden Bedingungen benötigt. In einigen Fällen kann jedoch gezeigt werden, dass unter
zusätzlichen Konvexitätsannahmen durch das Pontryaginsche Minimumprinzip auch
hinreichende Optimalitätsbedingungen gegeben sind. Diese Tatsache erweist sich besonders für ökonomische Probleme als sehr hilfreich. Denn in den meisten wirtschaftlichen Modellen geht man von einer Maximierung des Zielfunktionals aus und somit
werden für hinreichende Bedingungen zusätzliche Konkavitätsannahmen gefordert.
Diese Voraussetzung wird, da viele ökonomische Funktionen einen konkaven Verlauf
aufweisen, sehr häufig erfüllt. Als ein Beispiel wäre z.B. die Nutzenfunktion1 , die in
zahlreichen Problemen eine wichtige Rolle spielt, zu nennen.
4.1 Exkurs in die nichtlineare Optimierung
Um zu beweisen, dass die notwendigen Bedingungen unter zusätzlichen Konvexitätsannahmen auch hinreichend sind, werden die Kuhn-Tucker-Bedingungen der nichtlinearen Optimierung benötigt. Aus diesem Grunde wird zunächst ein kleiner Rückblick auf die nichtlineare Optimierung gegeben.
Definition 4.1.1 Gegeben seien die differenzierbare Abbildung f : Rn → R und die
stetig differenzierbare Abbildung g : Rn → Rm . Dann lautet das Standardproblem
der nichtlinearen Optimierung:
M inimiere
unter
1
f (x)
gi (x) ≤ 0,
i = 1, ..., k,
gi (x) = 0,
i = k + 1, ..., m.
(4.1)
Die Nutzenfunktion ist in der Volkswirtschaftslehre eine häufig gewählte Modellierung der Präferenzen einzelner Wirtschaftssubjekte.
24
4 Hinreichende Optimalitätsbedingungen
Definition 4.1.2 Erfüllt ein Punkt x ∈ Rn die Bedingungen:
gi (x) ≤ 0 f ür i = 1, ..., k
gi (x) = 0 f ür i = k + 1, ..., m,
so heißt er zulässig für das Optimierungsproblem (4.1).
Definition 4.1.3 Die Mengen
I(x̄) := {i ∈ {1, ..., k} | gi (x̄) = 0}
J(x̄) := I(x̄) ∪ {k + 1, ..., m}
werden als Mengen der aktiven Indizies bezeichnet.
Definition 4.1.4 Ein zulässiger Punkt x̄ des Standardproblems (4.1) heißt regulär,
wenn gilt:
(a) Die Gradienten (gk+1 )x (x̄), ..., (gm )x (x̄) sind linear unabhängig,
(b) ∃ v ∈ Rn mit : (gi )x (x̄)v < 0 f ür i ∈ I(x̄),
(gi )x (x̄)v = 0 f ür i ∈ {k + 1, ..., m}.
Definition 4.1.5 Ein zulässiger Punkt x̄ des Standardproblems (4.1) heißt normal,
wenn gilt: Die Gradienten (gi )x (x̄), i ∈ J(x̄) sind linear unabhängig.
Mit den obigen Definitionen können nun die notwendigen Optimalitätsbedingungen
der nichtlinearen Optimierung angegeben werden.
Satz 4.1.6 (Satz von John und Karush-Kuhn-Tucker)
Sei x̄ eine lokale Minimalstelle des Optimierungsproblems (4.1). Dann gilt:
(i) Es existiert ein Zeilenvektor (λ0 , λ) ∈ R × Rm \ {0, 0m } mit:
X
λ0 fx (x̄) +
λi (gi )x (x̄) = 0,
i∈J(x̄)
λ0 ≥ 0,
λi ≥ 0 f ür i ∈ I(x̄),
λi = 0 f ür i ∈
/ J(x̄).
(ii) Ist x̄ regulär, d. h. es gelte:
(a) Die Gradienten (gk+1 )x (x̄), ..., (gm )x (x̄) sind linear unabhängig,
(b) ∃ v ∈ Rn mit : (gi )x (x̄)v < 0 f ür i ∈ I(x̄),
(gi )x (x̄)v = 0 f ür i ∈ {k + 1, ..., m},
so kann λ0 = 1 gesetzt werden.
25
4 Hinreichende Optimalitätsbedingungen
(iii) Ist x̄ normal, d. h. die Gradienten (gi )x (x̄), i ∈ J(x̄) sind linear unabhängig,
so ist λ ∈ Rm mit λ0 = 1 eindeutig bestimmt.
Einen Beweis dieses Satzes findet man z. B. in Luenberger [9].
Definition 4.1.7 Die Komponenten λi , i = 0, 1, ..., m aus den Bedingungen des
Satzes (4.1.6) heißen Lagrange-Multiplikatoren und die Funktion
L(x, λ0 , λ) := λ0 f (x) + λg(x),
(4.2)
mit λ ∈ Rm Zeilenvektor, λ0 ∈ R heißt Lagrange-Funktion.
4.2 Konvexe Funktionen
Im folgenden Abschnitt werden zunächst die Begriffe der Konvexität und der QuasiKonvexität, die in diesem Kapitel eine sehr wichtige Rolle spielen, vorgestellt. Es
werden einige Sätze formuliert, die zum Beweis der hinreichenden Bedingungen notwendig sind. Zum Schluss wird ein ausgewähltes Kriterium zur Überprüfung der
Konvexität eingeführt. Dieses wird zur Behandlung des modifizierten Modells von
Lesourne und Leban in Kapitel 5 verwendet.
Definition 4.2.1 Eine nicht-leere Teilmenge D ⊆ Rn heißt konvex, wenn für alle
α mit 0 ≤ α ≤ 1 und für alle x1 , x2 ∈ D gilt:
αx1 + (1 − α)x2 ∈ D.
Definition 4.2.2 Sei D eine konvexe Teilmenge des Rn . Eine auf D definierte Funktion f : D → R heißt konvex, wenn für alle x1 , x2 aus ihrem Definitionsbereich D
und für alle α ∈ [0, 1] gilt:
f (αx1 + (1 − α)x2 ) ≤ αf (x1 ) + (1 − α)f (x2 )).
Falls f differenzierbar ist, so ist ihre Konvexität äquivalent zu:
fx (x1 )(x2 − x1 ) ≤ f (x2 ) − f (x1 ).
Gilt in diesen Ungleichungen anstelle von ≤ das ≥ Zeichen, so ist die Funktion f
konkav.
Definition 4.2.3 Eine Funktion f : Rn → R heißt quasi-konvex auf dem konvexen Definitionsbereich D ∈ Rn , wenn für alle x1 , x2 ∈ D und für alle ζ ∈ [0, 1]
gilt:
f (ζx1 + (1 − ζ)x2 ) ≤ min {f (x1 ), f (x2 )}
Gilt in diesen Ungleichungen anstelle von ≤ das ≥ Zeichen, so ist die Funktion f
quasi-konkav.
26
4 Hinreichende Optimalitätsbedingungen
Bemerkung 4.2.4 Jede konvexe Funktion ist auch quasi-konvex.
Bemerkung 4.2.5 Eine lineare Funktion f : D → R ist auf jeder konvexen Menge
D ⊆ Rn sowohl konvex als auch konkav.
Satz 4.2.6 Sei f : D → R quasi-konvex und differenzierbar auf der konvexen Menge
D ⊆ Rn . Dann gilt für alle x, x∗ ∈ D mit f (x) ≤ f (x∗ ):
fx (x∗ )(x − x∗ ) ≤ 0.
(4.3)
Satz 4.2.7 Sei f : D → R quasi-konvex und differenzierbar auf der konvexen Menge
D ⊆ Rn . Ferner existiere ein Vektor x∗ und ein Skalar γ mit
f (x∗ ) ≤ 0,
γ ≥ 0,
f (x∗ )γ = 0.
(4.4)
Dann gilt für alle x ∈ D mit f (x) ≤ 0:
γfx (x∗ )(x − x∗ ) ≤ 0.
(4.5)
Ein Beweis des Satzes (4.2.6) folgt unmittelbar aus der Definition einer quasikonvexen Funktion. Die Behauptung des Satzes (4.2.7) kann mittels des Satzes
(4.2.6) direkt nachvollzogen werden.
Des Weiteren werden einige Sätze über konvexe und quasi-konvexe Funktionen angegeben, deren Beweise sich direkt aus den jeweiligen Definitionen ergeben.
Satz 4.2.8 f (x) ist genau dann quasi-konvex, wenn die Menge
Aα = {x | f (x) ≤ α}
für jedes α ∈ Rn konvex ist.
Satz 4.2.9 Seien K ∈ Rn eine konvexe Menge und f1 , . . . , fm : K → Rn konvexe
Funktionen. Dann ist auch jede nichtnegative Linearkombination der Funktionen:
f :=
m
X
αi fi ,
αi ≥ 0
i = 1, . . . , m
i=1
eine konvexe Funktion.
Satz 4.2.10 Sind D1 , . . . , Dk ⊆ Rn konvexe Mengen, so ist deren Durchschnitt
T
T
D1 , . . . , Dk ebenfalls konvex.
Schließlich wird für den Beweis der hinreichenden Optimalitätsbedingungen noch
folgendes Resultat, entnommen aus Rockafellar [15], verwendet.
27
4 Hinreichende Optimalitätsbedingungen
Satz 4.2.11 Sei f (x) eine konvexe Funktion auf einem konvexen Definitionsbereich
D ⊆ Rn . Dann existiert für jedes x∗ aus D ein Zeilenvektor a = a(x∗ ), so dass für
alle f ∈ D gilt:
f (x) − f (x∗ ) ≥ a(x − x∗ ).
(4.6)
a wird als Subgradient von f bezeichnet. Ist f differenzierbar in x∗ , dann ist a
eindeutig bestimmt und gleich dem Gradienten, also a = fx (x∗ ). Ist φ konkav, so gilt
für alle x ∈ D:
f (x) − f (x∗ ) ≤ a(x − x∗ )
(4.7)
und a wird als Supergradient von x bezeichnet.
Um eine Funktion auf Konvexität zu überprüfen, benötigt man den Begriff der Defintheit einer Matrix:
Definition 4.2.12 Sei A eine symmetrische Matrix in Rn×n .
(i) A heißt positiv semidefinit, wenn xT Ax ≥ 0 für alle x ∈ Rn \0 gilt.
(ii) A heißt positiv definit, wenn sogar xT Ax > 0 für alle x ∈ Rn \0 gilt.
(iii) A heißt negativ semidefinit, wenn xT Ax ≤ 0 für alle x ∈ Rn \0 gilt.
(iv) A heißt negativ definit, wenn sogar xT Ax < 0 für alle x ∈ Rn \0 gilt.
Satz 4.2.13 Sei D ⊆ Rn eine konvexe Menge und sei f : D → R zweimal stetig
differenzierbar. Es gilt:
(i) Eine Funktion f ist genau dann auf D konvex, wenn die Hesse-Matrix ∇2 f (x)
für alle x ∈ D positiv semidefinit ist.
(ii) Eine Funktion f ist genau dann auf D konkav, wenn die Hesse-Matrix ∇2 f (x)
für alle x ∈ D negativ semidefinit ist.
(iii) Eine Funktion f ist genau dann auf D streng konvex, wenn die Hesse-Matrix
∇2 f (x) für alle x ∈ D positiv definit ist.
(iv) Eine Funktion f ist genau dann auf D streng konkav, wenn die Hesse-Matrix
∇2 f (x) für alle x ∈ D negativ definit ist.
Zur Überprüfung der Definitheit einer symmetrischen Matrix kann das Eigenwertkriterium zur Rate gezogen werden.
Satz 4.2.14 Sei A ∈ Rn×n eine symmetrische Matrix A ∈ Rn×n .
(i) A ist genau dann positiv definit, falls für alle Eigenwerte λi von A gilt: λi > 0.
28
4 Hinreichende Optimalitätsbedingungen
(ii) A ist genau dann positiv semidefinit, falls für alle Eigenwerte λi von A gilt:
λi ≥ 0.
(iii) A ist genau dann negativ definit, falls für alle Eigenwerte λi von A gilt: λi < 0.
(iv) A ist genau dann negativ semidefinit, falls für alle Eigenwerte λi von A gilt:
λi ≤ 0.
(v) A ist genau dann indefinit, wenn A mindestens einen positiven und einen
negativen Eigenwert besitzt.
4.3 Hinreichende Optimalitätsbedingungen für
unbeschränkte Steuerprozesse
Die hinreichenden Optimalitätsbedingungen können nun folgendermaßen formuliert
werden:
Satz 4.3.1 Sei (x*,u*) ein zulässiges Paar für das Problem (2.7). Es existiere eine Funktion λ : [0, tf ] → Rn , sowie ein Vektor ν ∈ Rr , so dass die notwendigen
Optimalitätsbedingungen von Satz (2.3.3) mit λ0 = 1 erfüllt sind. Ferner seien:
(i) g(x) konvex,
(ii) ψ(x) affin-linear,
(iii) H 0 (t, x, λ) konvex in x für alle (t, λ(t)), t ∈ [0, tf ], wobei
H 0 (t, x, λ) := min H (t, x∗ (t), λ(t), u) ,
u∈ U
t ∈ [0, tf ].
Dann ist (x*,u*) eine optimale Lösung.
Bemerkung 4.3.2 Die Konvexität von H 0 in x kann durch die stärkere Voraussetzung der Konvexität von H in (x, u) ersetzt werden.
In diesem Abschnitt wird zunächst ein Beweis des Satzes (4.3.1) über das so genannte Enveloppentheorem geführt. Hierbei wird jedoch die Differenzierbarkeit der
minimierten Hamiltonfunktion in x vorausgesetzt. Ein allgemeinerer Beweis, der auf
diese Bedingung verzichtet, wird im nächsten Abschnitt im Rahmen zustandsbeschränkter Steuerprozesse vorgestellt.
29
4 Hinreichende Optimalitätsbedingungen
Lemma 4.3.3 (Enveloppentheorem)
Eine Funktion φ : Rn × Rm → R sei definiert für (x, u) ∈ D × U , wobei D offen sei.
φ0 : Rn → R sowie u∗ : Rn → Rm seien gegeben durch:
φ0 (x) = min φ(x, u),
u∈U
u∗ (x) = arg min φ(x, u).
u∈U
Sind φ0 und φ stetig differenzierbar in x, so gilt:
φx (x, u) |u=u∗ (x) = φ0x (x).
Einen Beweis hierzu findet man bei Derzko at al. [2].
Für die minimierte Hamiltonfunktion
H 0 (t, x, λ) := min H (t, x, λ, u)
u∈U
(4.8)
ergibt sich aus dem Hilfssatz, dass für
u∗ (x, λ, t) = arg min H (t, x, λ, u)
u∈U
folgende Beziehungen gelten:
H 0 (t, x, λ) = H(t, x, λ, u∗ ),
Hx0 (t, x, λ) = Hx (t, x, λ, u∗ ).
(4.9)
Beweis zu Satz 4.3.1
Gemäß (2.1.8) ist die Behauptung des Satzes (4.3.1) bewiesen, falls gezeigt werden
kann, dass die Differenz
∆ := F (x, u) − F (x∗ , u∗ )
(4.10)
nicht negativ ist. Es sei (x(t), u(t)) ein beliebiges, zulässiges Funktionenpaar auf
[0, tf ]. Mittels der Hamiltonfunktion, mit λ0 = 1, lässt sich die Funktion f0 (t, x(t), u(t))
schreiben als
f0 (t, x(t), u(t)) = H(t, x, λ, u) − λf (t, x, u) .
Damit kann man die obige Differenz folgendermaßen umformulieren:
30
4 Hinreichende Optimalitätsbedingungen
∆ = g (x(tf )) +
Z
tf
f0 (t, x(t), u(t)) dt
0
Z
tf
f0 (t, x∗ (t), u∗ (t)) dt
− g (x (tf )) −
0
Z tf
(H(t, x, λ, u) − λf (t, x, u))dt
= g (x(tf )) +
0
Z tf
∗
− g (x (tf )) −
(H(t, x∗ , λ, u∗ ) − λf (t, x∗ , u∗ ))dt
Z 0tf
= g (x(tf )) +
(H(t, x, λ, u) − λẋ)dt
0
Z tf
∗
(H(t, x∗ , λ, u∗ ) − λẋ∗ )dt
− g (x (tf )) −
∗
0
= g (x(tf )) − g (x∗ (tf ))
Z tf
+
(H(t, x, λ, u) − H(t, x∗ , λ, u∗ ) − λ(ẋ − ẋ∗ ))dt.
(4.11)
0
Aus der Konvexitätsannahme von H 0 (t, x, λ) bezüglich x und (4.8)-(4.9) folgt nun:
H(t, x, λ, u) − H(t, x∗ , λ, u∗ ) ≥ H 0 (t, x, λ) − H 0 (t, x∗ , λ)
≥ Hx0 (t, x∗ , λ)(x − x∗ )
(4.12)
= Hx (t, x∗ , λ)(x − x∗ )
und aus der Konvexität von g(x) erhält man die Ungleichung:
g (x(tf )) − g (x∗ (tf )) ≥ gx (x∗ (tf ))(x(tf ) − x∗ (tf )).
(4.13)
Durch das Einsetzen der beiden Abschätzungen und der adjungierten Differentialgleichungen in die Differenz ergibt sich nun folgendes:
∗
∗
∆ ≥ gx (x (tf ))(x(tf ) − x (tf )) +
= gx (x∗ (tf ))(x(tf ) − x∗ (tf )) −
= gx (x∗ (tf ))(x(tf ) − x∗ (tf )) −
Z
tf
(Hx (t, x∗ , λ)(x − x∗ ) − λ(ẋ − ẋ∗ ))dt
Z0 tf
Z0 tf
(λ̇(x − x∗ ) + λ(ẋ − ẋ∗ ))dt
(
0
∗
∗
d
λ(x − x∗ ))dt
dt
t
= gx (x (tf ))(x(tf ) − x (tf )) − [λ(t)(x(t) − x∗ (t))]0f
= gx (x∗ (tf ))(x(tf ) − x∗ (tf )) − λ(0) [x(0) − x∗ (0)] + λ(tf ) [x(tf ) − x∗ (tf )] .
31
4 Hinreichende Optimalitätsbedingungen
Beachtet man die Transversalitätsbedingung, die Linearität von ψ(x), sowie die Tatsache, dass stets x(0) = x∗ (0) gilt, folgt unmittelbar:
∆ ≥ gx (x∗ (tf ))(x(tf ) − x∗ (tf )) − λ(0) [x(0) − x∗ (0)] + λ(tf ) [x(tf ) − x∗ (tf )]
= gx (x∗ (tf ))(x(tf ) − x∗ (tf )) + [gx (x∗ (tf ∗ )) + ρψx (x∗ (tf ))] [x(tf ) − x∗ (tf )]
= ρψx (x∗ (tf )) [x(tf ) − x∗ (tf )]
= ρ [ψ(x(tf )) − ψ(x∗ (tf ))]
= 0.
Insgesamt ergibt sich somit:
∆ := F (x, u) − F (x∗ , u∗ ) ≥ 0.
2
4.4 Hinreichende Optimalitätsbedingungen für OSP
mit Zustandsbeschränkungen
Auch für zustandsbeschränkte Steuerprozesse können, analog zu unbeschränkten
Problemen aus den notwendigen Optimalitätsbedingungen, im Falle einer konvexen
minimierten Hamiltonfunktion, hinreichende Bedingungen gewonnen werden. Dabei
wird von der reinen Zustandsbeschränkung die Quasi-Konvexität gefordert.
Die hinreichenden Optimalitätsbedingungen für beschränkte Probleme lassen sich
nun im folgenden Satz zusammenfassen.
Satz 4.4.1 Sei (x*,u*) ein zulässiges Paar für das Problem (5.1), welches die Voraussetzung 3.1.7 erfüllt. Es existiere eine Funktion λ : [0, tf ] → Rn , µ : [0, tf ] → R
sowie Multiplikatoren ν(ti ), ρ ∈ Rr , so dass die notwendigen Optimalitätsbedingungen von Satz (2.3.3) mit λ0 = 1 erfüllt sind. Ferner seien:
(i) g(x) konvex,
(ii) ψ(x) affin-linear,
(iii) S(x) quasi-konvex,
(iv) H 0 (t, x, λ) sei konvex in x für alle (t, λ(t)), t ∈ [0, tf ], wobei
H 0 (t, x, λ) := min H (t, x∗ (t), λ(t), u) ,
u∈ U
Dann ist (x*,u*) eine optimale Lösung.
32
t ∈ [0, tf ].
4 Hinreichende Optimalitätsbedingungen
Der Beweis des Satzes (4.4.1) wird mittels des folgenden Satzes geführt.
Satz 4.4.2 Sei (x*,u*) ein zulässiges Paar für das Problem (5.1) mit (3.2). Es
existiere eine stückweise stetig differenzierbare Funktion λ : [0, tf ] → Rn , so dass
mit der Hamiltonfunktion H (t, x, λ, u) und λ0 = 1 für jedes andere zulässiges Paar
(x,u) folgende Bedingungen erfüllt sind:
(i) Für fast alle t ∈ [0, tf ] gilt:
H (t, x, λ, u) − H (t, x∗ , λ, u∗ ) ≥ λ̇ [x∗ (t) − x(t)] .
(4.14)
(ii) An allen Unstetigkeitsstellen τ von λ gilt die Sprungbedingung:
−
λ(τ ) − λ(τ + ) [x∗ (τ ) − x(τ )] ≥ 0.
(4.15)
(iii) Im Endzeitpunkt tf gilt:
λ(tf ) [x∗ (tf ) − x(tf )] − g(x∗ (tf )) + g(x(tf )) ≥ 0.
(4.16)
Dann ist (x*,u*) eine optimale Lösung.
Beweis: Analog zu dem Beweis des Satzes (4.3.1) ist die Aussage dieses Satzes
bewiesen, wenn gezeigt wird, dass für alle zulässige (x, u) die Ungleichung
∆ := F (x, u) − F (x∗ , u∗ ) ≥ 0
erfüllt ist. Auch hier kann die Differenz mittels der Definition der Hamiltonfunktion
umgeformt werden. Es gilt also:
∗
∆ = g (x(tf )) − g (x (tf )) +
Z
tf
(H(t, x, λ, u) − H(t, x∗ , λ, u∗ ) − λ(ẋ − ẋ∗ ))dt.
t0
Aus der Bedingung (4.14 ) ergibt sich somit:
∗
∆ ≥ g (x(tf )) − g (x (tf )) +
= g (x(tf )) − g (x∗ (tf )) +
= g (x(tf )) − g (x∗ (tf )) +
Z
tf
Z0 tf
Z0 tf
0
33
(λ̇(x∗ − x) − λ(ẋ − ẋ∗ ))dt
(λ̇(x∗ − x) + λ(ẋ∗ − ẋ))dt
(
d
λ(x − x∗ ))dt.
dt
4 Hinreichende Optimalitätsbedingungen
Unter Berücksichtigung möglicher Unstetigkeitsstellen τi der adjungierten Variablen
λ(t) erhält man:
∆ ≥ g (x(tf )) − g (x∗ (tf )) + λ(tf ) [x∗ (tf ) − x(tf )]
X
λ(τi− ) − λ(τi+ ) [x∗ (τi ) − x(τi )] − λ(0) [x∗ (0) − x(0)] .
+
i
Beachtet man, dass stets x∗ (0) = x(0) = x0 gilt, folgt aus (4.15) und (4.16) direkt
die Behauptung:
F (x, u) − F (x∗ , u∗ ) ≥ 0.
2
Beweis zu Satz 4.4.1: Es sei der Steuerbereich U durch Ungleichungen der Form:
U := {u ∈ Rm |
mit h(t, u) ≤ 0}
gegeben.
Nach Voraussetzung ist U konvex. Außerdem ist die minimierte Hamiltonfunktion
H 0 (t, x, λ) ebenfalls konvex. Demnach existiert laut Satz (4.2.11) ein Subgradient
a(t) mit
H 0 (t, x, λ) − H 0 (t, x∗ (t), λ) ≥ a(t) [x − x(t)∗ ]
(4.17)
für alle x ∈ Rn .
Mittels Definition der minimierten Hamiltonfunktion gilt somit die Abschätzung:
H(t, x, λ, u) − H(t, x∗ (t), λ, u∗ ) ≥ H 0 (t, x, λ) − H 0 (t, x∗ (t), λ) ≥ a(t) [x − x(t)∗ ]
⇒ H(t, x, λ, u) − a(t)x ≥ H(t, x∗ (t), λ, u∗ ) − a(t)x∗ .
(4.18)
Daher ist das Paar (x∗ , u∗ ) zu jedem Zeitpunkt t eine optimale Lösung für das
nichtlineare Optimierungsproblem:
M inimiere
unter
H(t, x, λ, u) − a(t)x
h(t, u) ≤ 0.
(4.19)
Die Lagrange-Funktion zu diesem Problem lautet:
L(t, x, η) = H(t, x, λ, u) − a(t)x + η(t)h(t, u)
Nach dem Satz von Karusch-Kuhn-Tucker gilt für die optimale Lösung (x∗ , u∗ ) unter
anderem folgende Bedingung:
Lx (t, x∗ , u∗ η) = Hx (t, x∗ , λ, u∗ ) − a(t) = 0.
34
(4.20)
4 Hinreichende Optimalitätsbedingungen
Des Weiteren folgt aus der adjungierten Differentialgleichung des Minimumprinzips
λ̇ = −H̃x (t, x∗ , λ, u∗ ) = −Hx (t, x∗ , λ, u∗ ) − µ(t)Sx (x∗ (t))
⇒ Hx (t, x∗ , λ, u∗ ) = −λ̇ − µ(t)Sx (x∗ (t)).
(4.21)
Durch das Einsetzen von (4.21) in (4.20) erhält man für den Subgradienten a(t):
a(t) = −λ̇ − µ(t)Sx (x∗ (t)).
(4.22)
Und damit kann die Ungleichung (4.18) weiter umgeformt werden:
H(t, x, λ, u) − H(t, x∗ (t), λ, u∗ ) ≥ [−λ̇ − µ(t)Sx (x∗ (t))][x − x(t)∗ ]
∗
∗
∗
(4.23)
∗
H(t, x, λ, u) − H(t, x (t), λ, u ) ≥ [λ̇ + µ(t)Sx (x (t))][x(t) − x]
H(t, x, λ, u) − H(t, x∗ (t), λ, u∗ ) ≥ λ̇[x(t)∗ − x] + µ(t)Sx (x∗ (t))[x(t)∗ − x].
Zudem ist der Term µ(t)Sx (x∗ (t))[x(t)∗ − x] nach Satz (4.2.8) nicht negativ. Somit
gilt:
H(t, x, λ, u) − H(t, x∗ (t), λ, u∗ ) ≥ λ̇[x(t)∗ − x]
(4.24)
und die Bedingung (4.14) des Satzes (4.4.2) ist erfüllt.
Laut der Sprungbedingung des erweiterten Minimumprinzips gilt für jede Verbindungsstelle τ von λ(t):
λ(τ − ) − λ(τ + ) = ν(τ )Sx (x∗ (τ ))
(4.25)
mit ν(τ ) ≥ 0. Laut Satz (4.2.7) ist der Ausdruck ν(τ )Sx (x∗ (τ ))(x − x∗ ) für alle x mit
S(x(t)) ≤ 0 nicht positiv, da S(x(t)) nach Voraussetzung quasi-konvex ist. Somit
kann (4.25) folgendermaßen abgeschätzt werden.
(λ(τ − ) − λ(τ + ))[x∗ − x] = [ν(τ )Sx (x∗ (τ ))][x∗ − x]
(λ(τ − ) − λ(τ + ))[x∗ − x] = −[ν(τ )Sx (x∗ (τ ))][x − x∗ ]
(4.26)
⇒ (λ(τ − ) − λ(τ + ))[x∗ − x] ≥ 0.
Damit ist die Ungleichung (4.15) des Satzes (4.4.2) sichergestellt und es bleibt nur
noch (4.16) zu zeigen. Hierfür wird die Transversalitätsbedingung verwendet. Mit
λ0 = 1 lautet diese:
λ(tf ) = λ0 gx (x∗ (tf )) + ρψx (x∗ (tf )) + γSx (x∗ (tf )),
γ ≥ 0,
γS(x∗ (tf )) = 0
35
4 Hinreichende Optimalitätsbedingungen
und aufgrund der Quasi-Konvexität von S(x) folgt mittels des Satzes (4.2.7):
γSx (x∗ (tf ))(x∗ (tf ) − x(tf )) ≥ 0.
(4.27)
Ferner ist g(x) konvex, d.h. es gilt:
g (x(tf )) − g (x∗ (tf )) ≥ gx (x∗ (tf ))(x(tf ) − x∗ (tf ))
⇔ −g (x(tf )) + g (x∗ (tf )) ≤ −gx (x∗ (tf ))(x(tf ) − x∗ (tf ))
∗
∗
(4.28)
∗
⇔ −g (x(tf )) + g (x (tf )) ≤ gx (x (tf ))(x (tf ) − x(tf )).
Außerdem folgt aus der Linearität von ψ(x)
ρψx (x∗ (tf )) [x(tf ) − x∗ (tf )] = ρ [ψ(x(tf )) − ψ(x∗ (tf ))] = 0.
(4.29)
Unter Beachtung der obigen Abschätzungen ergibt sich:
λ(tf ) = gx (x∗ (tf )) + ρψx (x∗ (tf )) + γSx (x∗ (tf ))
⇔ λ(tf )(x∗ (tf ) − x(tf )) = (gx (x∗ (tf )) + ρψx (x∗ (tf )) + γSx (x∗ (tf )) (x∗ (tf ) − x(tf ))
⇔ λ(tf )(x∗ (tf ) − x(tf )) ≥ −g (x(tf )) + g (x∗ (tf )) + γSx (x∗ (tf ))(x∗ (tf ) − x(tf ))
⇔ λ(tf )(x∗ (tf ) − x(tf )) − g (x∗ (tf )) + g (x(tf )) ≥ γSx (x∗ (tf ))(x∗ (tf ) − x(tf ))
⇔ λ(tf )(x∗ (tf ) − x(tf )) − g (x∗ (tf )) + g (x(tf )) ≥ 0.
(4.30)
Damit sind alle Voraussetzungen des Satzes (4.4.2) erfüllt. Das Paar (x∗ , u∗ ), welches den notwendigen Optimalitätsbedingungen des erweiterten Minimumprinzips
genügt, ist optimal.
2
36
5 Numerische Lösung optimaler
Steuerprozesse mittels direkter
Verfahren
Bei der Bearbeitung optimaler Steuerprozesse spielen numerische Verfahren eine
sehr wichtige Rolle, denn viele praktische Probleme sind so komplex, dass sie nicht
mehr analytisch gelöst werden können. Im wesentlichen lassen sich die numerischen
Lösungsmethoden der optimalen Steuerprozesse in zwei Klassen einteilen: direkte
und indirekte Verfahren1 . Bei den indirekten Verfahren werden die notwendigen Optimalitätsbedingungen aus der Theorie verwendet, um den Steuerprozess auf ein
Randwertproblem zurückzuführen. Zur numerischen Lösung des erhaltenen Randwertproblems kann dann eines der existierenden Verfahren, wie z.B.
• Einfach-Schießverfahren,
• Mehrfach-Schießverfahren,
• Kollokationsverfahren,
• Differenzverfahren
eingesetzt werden. Ein Vorteil indirekter Verfahren ist, dass mit deren Hilfe sehr
gute Ergebnisse, mit einer Genauigkeit der Größenordnung 10−10 , erzielt werden
können. Deren Verwendung ist jedoch auch mit sehr großen Nachteilen verbunden.
Der Benutzer sollte sich mit der Theorie der optimalen Steuerprozesse, um z. B. die
adjungierten Differentialgleichungen aufstellen zu können, gut auskennen. Zudem
wird eine anfängliche Schätzung adjungierter Variablen, die unter Umständen Unstetigkeitsstellen aufweisen, benötigt. Des Weiteren muss die Struktur der Lösung
dem Anwender bekannt sein. Es ist jedoch im Allgemeinen nicht möglich diese a
priori zu bestimmen. Besonders bei komplexen Modellen ist der Verlauf der optimalen Steuerung meistens dem Problem von vornherein nicht anzusehen.
1
Man beachte, dass die Namensgebung nichts mit dem Direkten und dem Indirekten Ansatz zur
Behandlung der reinen Zustandsbeschränkungen hat.
37
5 Numerische Lösung optimaler Steuerprozesse mittels direkter Verfahren
Bei den direkten Verfahren wird ein unendlich dimensionales Steuerungsproblem
durch Diskretisierung in ein endlich dimensionales, im Allgemeinen nichtlineares
Optimierungsproblem überführt, welches dann mit einem numerischen Algorithmus
gelöst werden kann. Auf diese Weise wurden auch die praktischen Beispiele der vorliegenden Arbeit behandelt.
5.1 Diskretisierung
Zur Diskretisierung der optimalen Steuerprozesse wird das Zeitintervall [0, tf ] in ein
Gitter mit den Gitterpunkten ti , an denen schließlich alle relevanten Größen ausgewertet werden, eingeteilt. Die einfachste Art der Diskretisierung ist die äquidistante
Aufteilung der Gitterpunkte.
Gegeben sei also ein autonomer optimaler Steuerprozess mit fester Endzeit tf 2 der
Form:
M inimiere
g (x(tf )) +
Z
tf
f0 (t, x(t), u(t)) dt
0
unter
dx(t)
= f (t, x(t), u(t))
dt
x(0) = x0 , ψ(x(tf )) = 0 ∈ Rr
ẋ(t) =
S(x(t), u(t)) ≤ 0,
t ∈ [0, tf ],
(5.1)
wobei S : Rn × Rm → Rk , k ∈ N+ eine hinreichend oft stetig differenzierbare
Funktion ist.
Sei N ∈ N+ und seien ti die Gitterpunkte des Zeitintervalls [0, tf ] mit
0 = t1 < t2 < · · · < tN −1 < tN = tf ,
des Weiteren seien die Näherungswerte für x(ti ), bzw. u(ti ) mit
xi := x(ti )
bzw.
ui := u(ti )
bezeichnet.
Dann kann ein Steuerprozess als ein Optimierungsproblem in den Variablen
(x1 , . . . , xN , u1 , . . . , uN ) ∈ R(n+m)N
2
In Abschnitt 2.2 wurde gezeigt, dass jeder Steuerprozess in so eine Form überführt werden kann.
38
5 Numerische Lösung optimaler Steuerprozesse mittels direkter Verfahren
folgendermaßen formuliert werden:
M inimiere
g (xN ) +
N
−1
X
(ti+1 − ti )f0 (xi , ui )
i=1
unter
xi+1 = xi + (ti+1 − ti )f (xi , ui ),
x1 = x0 ,
S(xi , ui ) ≤ 0,
i = 1, . . . , N − 1
(5.2)
ψ(xN ) = 0 ∈ Rr
(5.3)
i = 1, . . . , N.
(5.4)
Dabei wurde hier zur Approximation der Differentialgleichungen das Euler-Verfahren
verwendet und das Integral durch eine Treppenfunktion angenähert. Natürlich können
neben diesen Verfahren auch andere Verfahren höherer Ordnung eingesetzt werden.
Bei der Erstellung einer Lösung der praktischen Beispiele in dieser Arbeit wurde
z. B. zur Approximation des Zustandes auf das Euler-Verfahren der Ordnung O(h)
und auf das Heun-Verfahren, welches die Fehlerordnung O(h2 ) besitzt, zurückgegriffen. Beide Verfahren zeichnen sich dadurch aus, dass zur Berechnung die Werte
der Steuerung im Inneren der Teilintervalle [ti , ti+1 ] nicht benötigt werden. Bei einigen anderen Verfahren (z. B. das Runge-Kutta-Verfahren) bedarf es jedoch einer
Bestimmung der Näherungen der Steuerfunktion in den Intervallinnenpunkten. Die
zusätzlichen Werte können in solchen Fällen z. B. durch Interpolation oder auch
konstante, lineare oder kubische Splines gewonnen werden.
Eine detaillierte Beschreibung verschiedener Verfahren zur Approximation der Steuerung, des Zustandes, des Zielfunktionals, sowie der Beschränkungen kann in Kim [5]
oder Büskens [1] gefunden werden.
5.2 Vor- und Nachteile der direkten Verfahren
Die wesentlichen Vorteile der direkten Verfahren im Vergleich zu den indirekten
Verfahren sind:
• Es werden dem Anwender keine Kenntnisse der Theorie optimaler Steuerprozesse abverlangt.
• Die Schaltstruktur muss nicht bekannt sein.
• Direkte Verfahren zeichnen sich durch einen sehr großen Konvergenzradius aus.
• Die adjungierten Differentialgleichungen werden nicht benötigt.
• Eine Startschätzung der kritischen Punkte (wie z. B. Unstetigkeitsstellen, Verbindungspunkte) sowie eine Startschätzung der adjungierten Variablen sind
nicht erforderlich.
39
5 Numerische Lösung optimaler Steuerprozesse mittels direkter Verfahren
Zudem konnten höhere Rechenzeiten und geringere Genauigkeiten, die sich nachteilig
auf direkte Verfahren auswirkten, in der Vergangenheit dank neuer Entwicklungen
und Technologien soweit verbessert werden, dass sie kaum noch ins Gewicht fallen.
Die direkten Verfahren haben allerdings den Nachteil, dass sie relativ viel Speicherplatz verbrauchen. Dies macht sich insbesondere bei größeren Problemen (wie z. B.
komplexes Unternehmensmodell aus Kapitel 7 mit sieben Zustandsvariablen und
vier Steuerungen) bemerkbar.
Das Fehlen der adjungierten Variablen erweist sich nicht als ein Nachteil, denn diese
können nachträglich leicht berechnet werden.
Zur Bearbeitung der praktischen Beispiele dieser Arbeit wurden Optimierungsalgorithmen LOQO von Prof. R. J. Vanderbei sowie IPOPT von A. Wächter und
L. T. Biegler eingesetzt. Dabei wurden beide Solver unter der Programmierumgebung AMPL (AMPL ist eine algebraische Modellierungssprache zur Formulierung
von Optimierungsproblemen.) aufgerufen. Beide Programme benutzen das InnerePunkte-Verfahren zur Lösung nichtlinearer Optimierungsprobleme. Die genauen Details zur Implementierung der beiden Optimierer können in [16] bzw. [17] nachgeschlagen werden.
40
6 Das modifizierte Modell von
Lesourne und Leban
Nachdem in den vorherigen Kapiteln die benötigten Instrumente zur Lösung optimaler Steuerprozesse mit reinen Zustandsbeschränkungen vorgestellt wurden, werden nun zwei praktische Probleme aus dem Bereich der Ökonomie behandelt. Beide
Beispiele basieren auf dem in der Literatur weit verbreiteten Modell von Lesourne
und Leban [8], welches in Abschnitt 6.1 beschrieben wird. In diesem Kapitel wird
zunächst eine numerische Lösung, inklusive ausführlicher Diskussion des erweiterten
Pontryaginschen Minimumprinzips, eines abgeänderten Modells von Lesourne und
Leban vorgestellt. Die durchgeführte Modifikation war für die vorliegende Arbeit
erforderlich, um ein Problem mit nur linear auftretenden Steuerungen zu erhalten.
Das modifizierte Modell dient in dieser Arbeit vor allem als Beispiel eines ökonomischen Steuerprozesses, bei dem die notwendigen Optimalitätsbedingungen auch
hinreichend sind. Dies wird in Abschnitt 6.5 gezeigt.
6.1 Beschreibung des Modells von Lesourne und
Leban
Betriebswirtschaftlich gesehen kann das Modell von Lesourne und Leban dem Sektor
Unternehmenswachstum: Investition, Finanzierung und Beschäftigung“ zugeordnet
”
werden. Im Vordergrund des Modells steht das Firmenwachstum in einer bestimmten
Planungsperiode [0, tf ] unter Berücksichtigung der Finanz- und Beschäftigungspolitik. Die signifikante Größe des Problems, die sich in der Unternehmensdynamik
niederschlägt, ist die Kapitalstruktur des Unternehmens. Der Kapitalstock K(t)
wird aus den Finanzierungsmitteln Eigenkapital x1 (t) und Fremdkapital x2 (t) gebildet. Als Steuerungsmöglichkeiten stehen den Unternehmenseignern das Beschäftigungsniveau u1 (t), die Investitionen u2 (t) und die Dividendenauszahlung u3 (t) zur
Verfügung. Das Wachstum des Unternehmens wird am diskontierten Zahlungsfluss
der Dividenden gemessen. Das Zielfunktional lautet somit:
Z tf
Maximiere:
e−rt u3 (t)dt.
0
41
6 Das modifizierte Modell von Lesourne und Leban
Die Änderung des Eigenkapitals wird als Differenz zwischen dem mit dem Steuersatz
τ versteuerten Gewinn G und der Dividendenauszahlung u3 bestimmt:
ẋ1 (t) = (1 − τ )G(t) − u3 (t).
Zur Berechnung des reinen Gewinns wird der Erlös, der sich aus der Produktionsmenge F und dem Produktpreis p berechnen lässt, den angefallenen Kosten gegenübergestellt. Dabei wird in dem Modell davon ausgegangen, dass die gesamte
Produktionsmenge F (t) auf dem Markt umgehend absetzbar ist. Die Kosten setzen sich aus Zinsauszahlungen an die Fremdkapitalgeber, Abschreibungen auf das
Kapital und Lohnkosten zusammen. Es gilt also:
G(t) = pF (t) − ωu1 (t) − ρk x2 (t) − δK(t).
Dabei repräsentiert ω die jährliche Lohnrate, ρk den Fremdkapitalzins und δ die
Abschreibungsrate. Als Produktionsfunktion wird die in der Volkswirtschaft weit
verbreitete sublineare Cobb-Douglas-Produktionsfunktion gewählt:
F (t) = α(x1 (t) + x2 (t))α1 u1 (t)α2 ,
α, α1 , α2 > 0 und α1 + α2 < 1.
Die Veränderung des Gesamtkapitals K̇ = ẋ1 + ẋ2 ergibt sich aus der Gleichung:
K̇(t) = ẋ1 (t) + ẋ2 (t) := u3 (t) − δK(t).
Somit gilt für die Fremdkapitaländerung:
ẋ2 (t) = u3 (t) − δK(t) − ẋ1 (t) = u3 (t) − δ(x1 (t) + x2 (t)) − ẋ1 (t).
Von den beiden Zustandsvariablen x1 (t) und x2 (t) wird die Nichtnegativität verlangt.
Außerdem erwarten die Fremdkapitalgeber gewisse Sicherheiten von den Kreditnehmern. Üblicherweise wird von den Kreditgebern ein maximaler Verschuldungsgrad
κ > 0, dessen Höhe von der angestrebten Rendite des Unternehmens abhängt, festgelegt. Somit wird gesichert, dass das maximale Darlehen einen durch den Verschuldungsgrad κ gegebenen Anteil des Eigenkapitals nicht überschreitet. Mathematisch
betrachtet bedeutet das:
x2 (t) ≤ κx1 (t).
Die Randbedingungen sind für die Anfangswerte x1 (0) und x2 (0) gegeben. Da negative Beschäftigung, Investitionsrate sowie negative Dividendenauszahlung realitätsfremd sind, wird verständlicherweise von allen drei Steuerungen gefordert:
0 ≤ u1 (t)
0 ≤ u2 (t)
0 ≤ u3 (t).
42
6 Das modifizierte Modell von Lesourne und Leban
Für die Investitionsrate u2 (t) gilt zusätzlich:
u2 (t) ≤ u2max ,
denn auf einem unvollkommenen Kapitalmarkt1 sind die Investitionsmöglichkeiten
begrenzt.
Insgesamt erhält man ein Problem der Form:
Maximiere
Z
tf
e−rt u3 (t)dt
0
unter
ẋ1 = (1 − τ )(pα(x1 + x2 )α1 u1 α2 − ωu1 − ρk x2 − δ(x1 + x2 )) − u3
ẋ2 = u2 − δ(x1 + x2 ) − ẋ1
x1 (0) = x10 ,
x2 (0) = x20
0 ≤ x2
0 ≤ κx1 − x2
0 ≤ u1
0 ≤ u2 ≤ u2max
0 ≤ u3 .
Man beachte, dass das zeitliche Argument bei den Zustandsvariablen sowie den
Steuerungsvariablen aus Gründen der Vereinfachung und zur besseren Lesbarkeit
weggelassen wurde. Diese Schreibweise wird in diesem Kapitel beibehalten. Die übrigen Größen werden auf dem gesamten Planungszeitraum [0, tf ] als feste Parameter
vorgegeben und sind somit von der Zeit t unabhängig.
1
Die Prämissen für einen vollkommenen Kapitalmarkt (nach [14]) sind:
• es stehen unbeschränkte Kreditaufnahme- und Finanzmittelanlagemöglichkeiten zur
Verfügung,
• keine Differenzierung des Marktes hinsichtlich Eigen- oder Fremdkapitals und unterschiedlicher Bonität der Kunden,
• es herrscht vollständige Markttransparenz,
• es existiert einheitlicher Soll- und Habenzinssatz,
• es gibt keine Steuern und/oder keine Transaktionskosten.
43
6 Das modifizierte Modell von Lesourne und Leban
6.2 Formulierung des modifizierten
Steuerungsproblems
In dem Modell, das im oberen Abschnitt beschrieben wurde, wird das dynamische
System unter anderem auch über die Beschäftigung u1 gesteuert. Diese taucht aber
als klassischer Produktionsfaktor in der Cobb-Douglas-Produktionsfunktion als nicht
lineare Variable auf. Für die vorliegende Arbeit sind jedoch die Probleme mit linear
auftretender Steuerung von besonderem Interesse. Daher ist eine leichte Modifikation des beschriebenen Modells von Lesourne und Leban nötig. Hierfür wird die
Beschäftigung, die zuvor als Steuerungsvariable fungierte, als zusätzliche Zustandsvariable x3 unter Berücksichtigung deren Veränderung in der Dynamik eingeführt.
Auf diese Weise wird auch der Beschäftigungssektor neben dem Kapitalsektor in die
Unternehmensdynamik einbezogen. Außerdem ist die Betrachtung der Beschäftigung
als eine stetige Zustandsgröße viel realitätsnäher. Somit erhält man eine weitere Differentialgleichung:
ẋ3 = u1 ,
mit einem geeigneten Anfangswert x3 (0). Um den Beschäftigungsabbau nicht zu
vernachlässigen, werden für die Steuerung u1 auch negative Werte bis zu einem
bestimmten u1min < 0 zugelassen. Zusätzlich wird der Beschäftigungsaufbau durch
u1max begrenzt. Des Weiteren wird für die Dividendenauszahlung u3 eine obere Grenze u3max gesetzt. Die Beschäftigung x3 darf wiederum aus ökonomischen Gründen
nicht negativ werden. Für die Produktionsfunktion gilt jetzt:
F = α(x1 + x2 )α1 xα3 2 ,
α, α1 , α2 > 0 und α1 + α2 < 1.
Das so entstandene modifizierte Steuerungsproblem in Mayer-Form lautet:
Minimiere:
− x4
unter: ẋ1 = (1 − τ )(pα(x1 + x2 )α1 xα3 2 − ωx3 − ρk x2 − δ(x1 + x2 )) − u3
ẋ2 = u2 − δ(x1 + x2 ) − ẋ1
ẋ3 = u1
ẋ4 = e−rt u3
0 ≤ x2 ,
0 ≤ x3 ,
u1min ≤ u1 ≤ u1max ,
x1 (0) = x10 ,
0 ≤ κx1 − x2
0 ≤ u2 ≤ u2max ,
x2 (0) = x20 ,
0 ≤ u3 ≤ u3max
x3 (0) = x30 ,
x4 (0) = 0.
Für numerische Berechnungen müssen noch konkrete Werte der einzelnen Parameter angegeben werden. Die benötigten Angaben wurden aus [7] entnommen und
44
6 Das modifizierte Modell von Lesourne und Leban
tf
p
κ
ω
δ
τ
α
α1
α2
ρk
r
10
Planungszeitraum
0.05
konstanter Produktpreis
0.8
maximaler Verschuldungsgrad
2.0
jährliche Lohnrate
0.440
Abschreibungsrate
0.5
Steuersatz
100
Effizienzparameter
0.35
Produktionselastizität des Kapitals
0.5 Produktionselastizität der Beschäftigung
0.11
Fremdkapitalzins
0.112
Kalkulationszinssatz
Tabelle 6.1: Liste der gewählten Parameter für modifiziertes Modell
sind in der Tabelle 6.1 erfasst. Die Anfangswerte für x1 (0) und x2 (0), sowie die
Ober- und Untergrenzen für die Steuerungen wurden ebenfalls wie in [7] festgelegt.
Der Anfangswert für die neu eingeführte Zustandsvariable x3 (0), welche für den Lagerbestand steht, wurde letztendlich von der entsprechenden Variable aus dem im
nächsten Kapitel beschriebenen komplexen Unternehmensmodell übernommen. Die
gewählten Werte lauten:
x1 (0) = 100
x2 (0) = 50
x3 (0) = 30
u1min = −10
u1max = 10
u2min = 0
u2max = 100
u3min = 0
u3max = 300.
6.3 Auswertung des Minimumprinzips
Bei dem eben vorgestellten modifizierten Modell von Lesourne und Leban handelt
es sich um einen optimalen Steuerprozess mit drei reinen Zustandsbeschränkungen.
45
6 Das modifizierte Modell von Lesourne und Leban
Während die beiden Nicht-Negativitätsbedingungen,
0 ≤ x2
0 ≤ x3 ,
durch die optimale Trajektorie nicht verletzt werden und somit irrelevant sind, ist
die Beschränkung für den maximalen Verschuldungsgrad,
S(x) = x2 − κx1 ≤ 0
aktiv. Dabei handelt es sich um eine Beschränkung der ersten Ordnung, denn es gilt:
S 1 = ẋ2 − κẋ1
(6.1)
= u2 − δ(x1 + x2 ) − ẋ1 − κẋ1
= u2 − δ(x1 + x2 ) − ẋ1 (1 + κ),
d. h. S 1 ist die erste Ableitung von S, die die Steuerung u explizit enthält.
Zunächst wird die Hamiltonfunktion aufgestellt, wobei angesichts des freien Endzustandes x(tf ), λ0 = 1 gesetzt werden kann.
H = λ1 ((1 − τ )(pα(x1 + x2 )α1 xα3 2 − ωx3 − ρk x2 − δ(x1 + x2 )) − u3 )
+ λ2 (u2 − δ(x1 + x2 ) − ẋ1 ) + λ3 u1 + λ4 e−rt u3 .
Für die erweiterte Hamiltonfunktion folgt mittels des direkten Verfahrens
H̃ = λ1 ((1 − τ )(pα(x1 + x2 )α1 xα3 2 − ωx3 − ρk x2 − δ(x1 + x2 )) − u3 )
+ λ2 (u2 − δ(x1 + x2 ) − ẋ1 ) + λ3 u1 + λ4 e−rt u3 + µ(x2 − κx1 ).
Die adjungierten Differentialgleichungen lauten:
λ̇1 = −(λ1 − λ2 )(1 − τ ) pαα1 (x1 + x2 )α1 −1 xα3 2 − δ − λ2 δ − κµ
λ̇2 = −(λ1 − λ2 )(1 − τ ) pαα1 (x1 + x2 )α1 −1 xα3 2 − ρk − δ − λ2 δ + µ
λ̇3 = −(λ1 − λ2 )(1 − τ ) pαα2 (x1 + x2 )α1 xα3 2 −1 − ω
λ̇4 = 0.
Durch partielle Ableitung der erweiterten Hamiltonfunktion nach den Steuerungen
u1 , u2 , u3 erhält man folgende Schaltfunktionen:
Hu1 = Σ1 = λ3
Hu2 = Σ2 = λ2
Hu3 = Σ3 = λ4 e−rt − λ1 + λ2 .
46
6 Das modifizierte Modell von Lesourne und Leban
Nach der Minimumbedingung des Pontryaginschen Minimumprinzips (??) wird die
erweiterte Hamiltonfunktion durch optimale Steuerungen u1 , u2 , u3 minimiert. Somit
ergibt sich die folgende Struktur für optimale Steuerungen:
, Σi (t) > 0
uimin
∗
ui (t) =
uimax
, Σi (t) < 0
unbestimmt , Σi (t) = 0
,
i = 1, 2, 3.
(6.2)
Ein Schaltpunkt tk wird durch die Bedingung Σi (tk ) = 0 festgelegt.
Aufgrund des freien Endzustands x(tf ) erhält man aus der Transversalitätsbedingung folgende Randbedingungen für die adjungierten Differentialgleichungen:
λ1 (tf ) = 0
λ2 (tf ) = 0
λ3 (tf ) = 0
(6.3)
λ4 (tf ) = −1.
Man beachte jedoch, dass die Endbedingungen (6.3) nur dann ihre Gültigkeit behalten, wenn die Zustandsbeschränkung am Ende der Planungsperiode inaktiv ist.
D. h. falls gilt:
S(x∗ (tf )) < 0.
Für den Fall S(x∗ (tf )) = 0, welcher bei dem betrachteten Problem tatsächlich auftritt, gilt:
λ1 (tf ) = −κγ
λ2 (tf ) = γ
λ3 (tf ) = 0
(6.4)
λ4 (tf ) = −1,
mit γ ∈ R, γ ≥ 0.
Außerdem gilt nach Komplementaritätsbedingung im Optimum für die Multiplikatorfunktion µ(t):
µ(t) ≥ 0,
µ(t) = 0,
f alls S(x∗ (t)) < 0.
47
6 Das modifizierte Modell von Lesourne und Leban
t
[ 0 , t1
[ t1 , t2
[ t2 , t3
[ t3 , t4
[ t4 , tf
u1
]
]
]
]
]
u2
u3
x2 − κx1 ≤ 0
u1max
u2min
u3max
u1max
u2min
singulär
u1min
u2min
singulär
singulär singulär singulär
singulär
u2min
singulär
n.a
a.
a.
a.
a.
Tabelle 6.2: Optimale Schaltstruktur des modifizierten Problems
t1
t2
t3
t4
0.062 0.9051 1.76 6.57
Tabelle 6.3: Schaltpunkte des modifizierten Problems
6.4 Numerische Ergebnisse
Bei der Erstellung einer numerischen Lösung des oben beschriebenen Modells wurden
zuerst die Fortran-Routine NUDOCCCS und der Optimierungsalgorithmus LOQO
zu Rate gezogen. Doch konnten die beiden Solver das vorliegende Problem nicht
lösen. NUDOCCCS lieferte immerhin einige Ergebnisse, die der später erhaltenen
optimalen Lösung ähnelten. Der Löser LOQO gab dagegen nur Fehlermeldungen
aus, er könne mit den gewählten Anfangswerten nicht rechnen. Auch eine Vorgabe
der Anfangswerte bei der Deklaration der Variablen, die erfahrungsgemäß schon mal
(beim Lösen des komplexen Modells2 ) geholfen hatte, führte nicht zum Ziel. Darauf wurde der Optimierungssolver IPOPT, der sich genau wie LOQO mit AMPL
schneidet und auf dem Innere-Punkte-Verfahren basiert, eingesetzt. Dabei wurde
dieselbe Quelldatei benutzt, die vorher mit LOQO nicht funktionierte. Schließlich
bekam man mithilfe des neu gewählten Solvers eine Lösung, die im nachfolgenden
vorgestellt wird. Die Rechenzeit betrug ca. 296.45 Sekunden, wobei zur Approximation des Zustandes das Euler-Verfahren bei 10000 Diskretisierungspunkten verwendet
wurde.
In der Tabelle (6.2) ist die Schaltstruktur der optimalen Steuerungen zusammengefasst. Die zugehörigen Schaltpunkte können der Tabelle (6.3) entnommen werden.
Die optimalen Zustände und die adjungierten Variablen sind in den Abbildungen
(6.2), (6.3) zu finden. Die Abbildung (6.1) zeigt den Verlauf der optimalen Steuerungen, während in der Abbildung (6.4) die Schaltfunktionen des modifizierten Modells
2
Im Entstehungsprozess dieser Arbeit wurde erst komplexes Unternehmensmodell, welches im
nächsten Kapitel behandelt wird, bearbeitet.
48
6 Das modifizierte Modell von Lesourne und Leban
10
40
8
6
4
30
u_2
u_1
2
0
20
-2
-4
-6
10
-8
-10
0
0
1
2
3
4
5
t
6
7
8
9
10
0
1
2
3
4
5
t
5
t
6
7
8
9
10
6
7
8
9
10
300
270
240
210
u_3
180
150
120
90
60
30
0
0
1
2
3
4
Abbildung 6.1: Die optimalen Steuerungen des modifizierten Modells
dargestellt sind. In der Abbildung (6.5) ist die Multiplikatorfunktion zu sehen.
Zunächst wird überprüft, ob die von dem Programm gelieferte optimale Lösung des
Problems die notwendigen Optimalitätsbedingungen tatsächlich erfüllt. Hierfür wird
jedes Zeitintervall einzeln betrachtet.
1. Zeitintervall [0, t1 ]
Auf dem ersten Intervall [0, t1 ] weisen alle drei Steuerungen eine bang-bang Struktur
auf. Für die Schaltfunktionen gilt hier:
Σ1 (t) < 0,
∀ t ∈ [0, t1 )
Σ2 (t) > 0,
∀ t ∈ [0, t1 )
Σ3 (t) < 0,
∀ t ∈ [0, t1 ).
49
6 Das modifizierte Modell von Lesourne und Leban
70
100
60
50
40
60
x_2
x_1
80
30
40
20
20
10
0
0
0
1
2
3
4
5
t
6
7
8
9
10
0
40
1
2
3
4
5
t
6
7
8
9
10
4
5
t
6
7
8
9
10
160
140
35
120
30
x_4
x_3
100
25
80
60
20
40
15
20
10
0
0
1
2
3
4
5
t
6
7
8
9
10
0
1
2
3
Abbildung 6.2: Die optimalen Trajektorien des modifizierten Modells
Die Steuerung u∗1 und u∗3 nehmen ihren Maximalwert und die Steuerung u∗2 ihren Minimalwert an. In diesem kleinen Zeitraum, der in den Grafen zwar schlecht
zu erkennen ist, aber dennoch vorhanden, findet demnach die maximal mögliche
Ausschüttung der Dividenden statt.
Die Verschuldungsbeschränkung ist auf [0, t1 ] nicht aktiv, d. h. es handelt sich hier
also um ein inneres Teilstück. Die Komplementaritätsbedingung ist mit µ(t) = 0 für
alle t ∈ [0, t1 ) erfüllt.
2. Zeitintervall [t1 , t2 ]
Der Zeitpunkt t1 = 0.062 ist der Eintrittspunkt der Verschuldungsbeschränkung,
welche ab t1 bis zum Ende der Planungsperiode tf = 10 aktiv ist, d. h. es gilt:
x2 − κx1 = 0,
∀ t ∈ [t1 , tf ].
Demnach liegt bei dem gegebenen Problem auf dem Intervall [t1 , tf ] ein Randstück
vor. Man beachte hier insbesondere, dass sich dadurch die Endbedingungen für die
50
0
0.2
-0.2
0.16
{/Symbol l_2^1}
{/Symbol l_1^1}
6 Das modifizierte Modell von Lesourne und Leban
-0.4
-0.6
-0.8
0.12
0.08
0.04
-1
0
0
1
2
3
4
5
t
6
7
8
9
10
0
0.02
1
2
3
4
5
t
6
7
8
9
10
4
5
t
6
7
8
9
10
-1.01
0
-1.005
-0.04
{/Symbol l_3^1}
{/Symbol l_3^1}
-0.02
-0.06
-1
-0.08
-0.1
-0.995
-0.12
-0.14
-0.99
0
1
2
3
4
5
t
6
7
8
9
10
0
1
2
3
Abbildung 6.3: Die optimalen Adjungierten des modifizierten Modells
adjungierten Differentialgleichungen, die man mittels der Transversalitätsbedingung
erhält, ändern. In t1 = 0.062 ändert sich auch das Verhalten der Steuerung u∗3 ,
diese zeigt von da an einen singulären Verlauf. Die erste bzw. die zweite Steuerung
nimmt auf [t1 , t2 ) weiterhin ihre Ober- bzw. ihre Untergrenze an. Die Grafen der
Schaltfunktion (6.4) zeigen, dass die Minimumbedingung auch hier erfüllt wird, denn
es gilt:
Σ1 (t) < 0,
∀ t ∈ [t1 , t2 ),
Σ2 (t) > 0,
∀ t ∈ [t1 , t2 ],
Σ3 (t) = 0,
∀ t ∈ [t1 , tf ].
Des Weiteren sieht man an dem Grafen (6.5), dass die Vorzeichen- und Komplementaritätsbedingung ebenfalls eingehalten werden. Die Multiplikatorfunktion µ(t)
weist folgenden Verlauf auf:
µ(t) = 0,
∀ t ∈ [0, t1 ]
µ(t) > 0,
∀ t ∈ [t1 , tf ].
51
6 Das modifizierte Modell von Lesourne und Leban
0.02
0.2
0
0.16
-0.04
{/Symbol l_2^1}
{/Symbol l_3^1}
-0.02
-0.06
-0.08
0.12
0.08
-0.1
0.04
-0.12
-0.14
0
0
1
2
3
4
5
t
6
7
8
9
10
0
1
2
3
4
5
t
6
7
8
9
10
0
{/Symbol s_1^4}
-0.05
-0.1
-0.15
-0.2
0
1
2
3
4
5
t
6
7
8
9
10
Abbildung 6.4: Die Schaltfunktionen des modifizierten Modells
Mit Hilfe der Minimumbedingung lässt sich die Multiplikatorfunktion berechnen,
denn auf dem gesamten Randstück [t1 , tf ] gilt Σ3 (t) = 0. Daraus folgt unmittelbar,
dass auch die Ableitung der Schaltfunktion auf diesem Stück verschwindet, d. h. es
gilt:
Σ̇3 (t) = λ̇4 e−rt − rλ4 e−rt − λ̇1 + λ̇2 = 0.
Wie man der nachfolgenden Rechnung entnehmen kann, ist der Multiplikator µ in
dem obigen Term enthalten.
⇒ 0 = Σ̇3 (t) = −rλ4 e−rt + (λ1 − λ2 )(1 − τ ) pαα1 (x1 + x2 )α1 −1 xα3 2 − δ − λ2 δ
− κµ − (λ1 − λ2 )(1 − τ ) pαα1 (x1 + x2 )α1 −1 xα3 2 − ρk − δ − λ2 δ + µ
= −rλ4 e−rt − ρk (λ2 − λ1 )(1 − τ ) + (1 + κ)µ.
52
4
4
3.5
3.5
3
3
10^2 x {/Symbol m_1}
10^2 x {/Symbol m_1}
6 Das modifizierte Modell von Lesourne und Leban
2.5
2
1.5
2.5
2
1.5
1
1
0.5
0.5
0
0
0
2
4
6
8
10
0
2
t
4
6
8
10
t
Abbildung 6.5: Multiplikatorfunktion: (links) mittels IPOPT erhaltene µ(t), (rechts)
theoretisch ausgerechnete µ(t)
Durch Auflösen der Gleichung nach µ erhält man schließlich:
⇒ µ(t) =
rλ4 e−rt + ρk (λ2 − λ1 )(1 − τ )
.
(1 + κ)
In dem rechten Grafen der Abbildung (6.5) ist die theoretisch ausgerechnete Multiplikatorfunktion µ(t) auf dem Intervall [t1 , tf ] dargestellt. Diese stimmt auf [t1 , tf ]
exakt mit der, von dem Optimierungssolver IPOPT gelieferten µ(t) überein.
Außerdem lässt sich die optimale Steuerung u∗3 auf dem gesamten Randstück in
Abhängigkeit von x1 , x2 , x3 , u2 bestimmen. Laut (6.1) handelt es sich bei der Verschuldungsbeschränkung um eine Zustandsbeschränkung der Ordnung p = 1. Die
Voraussetzung (3.1.7) ist mit
∂S 1
(x, u) = −(1 − τ )(1 + κ) 6= 0 ∀ t ∈ [t1 , tf ]
∂u3
erfüllt. Somit gilt auf [t1 , tf ] folgendes:
x2 − κx1 = 0
⇒ ẋ2 − κẋ1 = 0
⇒ u2 − δ(x1 + x2 ) − ẋ1 − κẋ1 = 0
⇒ u2 − δ(x1 + x2 ) − ẋ1 (1 + κ) = 0
⇒ −((1 − τ )(pα(x1 + x2 )α1 xα3 2 − ωx3 − ρk x2 − δ(x1 + x2 )) − u3 )(1 + κ) −
−δ(x1 + x2 ) + u2 = 0.
Bedenkt man noch, dass auf dem Randstück x2 = κx1 gilt, so resultiert offensichtlich
daraus:
u2 − δx1 (1 + κ)
. (6.5)
u3 = (1−τ )(pα(x1 (1+κ))α1 x3α2 −ωx3 −ρk κx1 −δx1 (1+κ))−
1+κ
53
6 Das modifizierte Modell von Lesourne und Leban
Die oben ausgerechnete Gleichung für u3 gilt auf dem gesamten Randstück [t1 , tf ].
Durch Einsetzen des optimalen Wertes u∗2 = 0, erhält man auf dem betrachteten
Zeitintervall [t1 , t2 ] folgende Vorschrift für u∗3 :
u∗3 = (1 − τ )(pα(x1 (1 + κ))α1 xα3 2 − ωx3 − ρk κx1 − δx1 (1 + κ)) + δx1 .
(6.6)
3. Zeitintervall [t2 , t3 ]
Im Zeitpunkt t2 = 0.9051 springt der Wert der Steuerung u∗1 von u1max auf u1min .
Für den Schaltpunkt t2 gilt:
Σ1 (t2 ) = 0,
und die Schaltfunktion der ersten Steuerung nimmt auf dem ganzen Intervall nur
streng positive Werte an,
Σ1 (t) > 0 ∀ t ∈ (t2 , t3 ).
4. Zeitintervall [t3 , t4 ]
Auf diesem Zeitintervall verhalten sich alle drei Steuerungen singulär, was durch den
Verlauf der Schaltfunktionen, wie man den Grafen der Abbildung (6.4) entnehmen
kann, bestätitgt wird:
Σ1 (t) = 0
Σ2 (t) = 0
Σ3 (t) = 0.
Da es sich bei dem betrachteten Intervall immer noch um einen Randstück handelt,
bleibt die für die Steuerung u3 berechnete Vorschrift auch hier erhalten. Es müssen
nur noch die Steuerungen u1 und u2 bestimmt werden. Laut Kapitel 2.4 kann der
Verlauf einer singulären Steuerung in einigen Fällen mittels der Schaltfunktion ausgerechnet werden. Dazu wird die Schaltfunktion solange nach der Zeit t differenziert
bis die gesuchte Steuerung in der Ableitung auftaucht. Bei dem gegebenen Problem
treten die benötigten Steuerungen schon in der zweiten Ableitung auf. Es gilt hier:
Σ1 (t) = 0 ⇒ Σ̇1 (t) = λ̇3 = 0
⇒
Σ̈1 (t) = λ̈3 = 0
Σ2 (t) = 0 ⇒ Σ̇2 (t) = λ̇2 = 0
⇒
Σ̈2 (t) = λ̈2 = 0,
54
6 Das modifizierte Modell von Lesourne und Leban
mit
Σ̈1 = (1 − τ )[((λ2 − λ1 )(1 − τ )ρk + µ(1 + κ)) pαα2 (x1 + x2 )α1 x3α2 −1 − ω
α1 (u2 − δ(x1 + x2 )) (α2 − 1)u1
+ (λ2 − λ1 )pα2 F (
+
)]
(x1 + x2 )x3
x23
Σ̈2 = (1 − τ )[((λ2 − λ1 )(1 − τ )ρk + µ(1 + κ))(pαα1 (x1 + x2 )α1 −1 xα3 2 − ρk − δ)
α2 u1
(α1 − 1)(u2 − δ(x1 + x2 ))
+
)]
+ (λ2 − λ1 )pα1 F (
2
(x1 + x2 )
(x1 + x2 )x3
+ δ((λ1 − λ2 )(1 − τ ) pαα1 (x1 + x2 )α1 −1 xα3 2 − ρk − δ − λ2 δ + µ) + µ̇.
Dabei stehen G bzw. F für die Gewinnfunktion bzw. die Produktionsfunktion, die
in dem vorliegenden Beispiel folgendermaßen gewählt wurden3 :
G = pF − ωx3 − ρk x2 − δ(x1 + x2 )
F = pα(x1 + x2 )α1 xα3 2 .
Nach einigen Umformulierungen der beiden Gleichungen erhält man ein lineares
(2 × 2) Gleichungssystem der Form:
a11 u1 + a12 u2 = b1
a21 u1 + a22 u2 = b2
mit den Koeffizienten
b1 =
b2 =
−
+
a11 =
a12 =
a21 =
a22 =
((λ1 − λ2 )(1 − τ )ρk + µ(1 + κ)) pαα2 (x1 + x2 )α1 x3α2 −1 − ω
δα1
+
α2 pF (λ2 − λ1 )
x3
α1 −1 α2
δ((λ2 − λ1 )(1 − τ ) [pαα1 (x1 + x2 )
x3 − ρk − δ − λ2 δ + µ) + µ̇]
α1 pF (λ2 − λ1 )(1 − τ )
((λ2 − λ1 )(1 − τ )ρk + µ(1 + κ))(pαα1 (x1 + x2 )α1 −1 xα3 2 − ρk − δ)
α1 pF (λ2 − λ1 )
δ(α1 − 1)
(x1 + x2 )
α2 − 1
x23
α1
(x1 + x2 )x3
α2
(x1 + x2 )x3
α1 − 1
.
(x1 + x2 )2
Unter Zuhilfenahme des Gauß-Eliminationsverfahrens ergibt sich folgende Lösung:
3
siehe Abschnitt (6.2)
55
6 Das modifizierte Modell von Lesourne und Leban
u∗1 =
u∗2 =
b1 − a12 u2
a11
21
b2 − aa11
b1
a22 −
(6.7)
.
a21
a
a11 12
(6.8)
Man beachte, dass in dem Term b2 sowohl der Multiplikator µ als auch dessen Ableitung,
−r2 λ4 e−rt + ρk (1 − τ ) [(λ2 − λ1 )(1 − τ )ρk + µ(1 + κ)]
,
(1 + κ)
auftauchen. Beide enthalten keine Steuerungsvariablen.
µ̇ =
5. Zeitintervall [t4 , tf ]
Auf dem letzten Intervall springt die Steuerung u∗2 im Schaltpunkt t4 = 6.57 wiederum auf ihren Minimalwert. Es gilt:
Σ2 (t4 ) = 0
Σ2 (t) > 0 ∀ t ∈ (t4 , tf ].
Die Steuerung u∗1 und u∗3 weisen weiterhin einen singulären Verlauf auf. Die beiden
Schaltfunktionen verschwinden auch auf dem letzten Zeitintervall:
Σ1 (t) = 0 ∀ t ∈ [t4 , tf ]
Σ3 (t) = 0 ∀ t ∈ [t4 , tf ].
Für die optimale Steuerung u∗3 gilt weiterhin die Vorschrift (6.5). Die Berechnung
der Steuerung u∗1 erfolgt genau wie im 4. Zeitintervall, wobei in die Gleichung (6.7)
für die Steuerung u∗2 der neue optimale Wert u∗2 = 0 eingesetzt wird. Demnach sieht
die u∗1 auf [t4 , tf ] folgendermaßen aus:
b1
.
(6.9)
a11
In den obigen Ausführungen wurde nun gezeigt, dass sowohl die Minimumbedingung
als auch die Vorzeichen- Komplementaritätsbedingung überall eingehalten werden.
Es bleibt also nur noch die Transversalitätsbedingung (6.4) zu prüfen. Hierfür werden die Werte der adjungierten Variablen an den Grafen der Abbildung (6.3) im
Endzeitpunkt tf = 10 abgelesen, diese lauten:
u∗1 =
λ1 (tf ) = −0.145,
λ2 (tf ) = 0.181,
λ3 (tf ) = 0,
λ4 (tf ) = −1.
Somit ist auch die Transversalitätsbedingung mit γ = 0.181 erfüllt.
Die von dem Optimierungsalgorithmus IPOPT gelieferte Lösung genügt also auf der
ganzen Planungsperiode [0, tf ] den notwendigen Optimalitätsbedingungen.
56
6 Das modifizierte Modell von Lesourne und Leban
6.5 Überprüfung der hinreichenden
Optimalitätsbedingungen
Um zu zeigen, dass die notwendigen Optimalitätsbedingungen auch hinreichend sind,
müssen die Voraussetzungen von Satz (4.4.1) nachgeprüft werden. Die ersten drei
Bedingungen sind trivialerweise erfüllt, denn es gilt:
1. g(x) ist als eine lineare Funktion konvex,
2. ψ(x) = 0,
3. S(x) = x2 − κx1 ist ebenfalls linear.
Es bleibt noch zu zeigen, dass die minimierte Hamiltonfunktion konvex in x ist, bzw.
gemäß Bemerkung (4.3.2), dass die Hamiltonfunktion konvex in x und u ist.
Die Hamiltonfunktion zu dem modifizierten Modell von Lesourne und Leban lautet:
H = (λ1 − λ2 ) ((1 − τ )(pα(x1 + x2 )α1 xα3 2 − ωx3 − ρk x2 − δ(x1 + x2 )) − u3 )
+ λ2 (u2 − δ(x1 + x2 )) + λ3 u1 + λ4 e−rt u3 .
Beim näheren Betrachten der obigen Funktion fällt auf, dass sowohl x als auch u
mit der Ausnahme des ersten Terms
T := (λ1 − λ2 )(1 − τ )pα(x1 + x2 )α1 xα3 2
linear auftreten. Nach Satz (4.2.9) ist eine positive Linearkombination konvexer
Funktionen wiederum konvex. Demnach ist die Hamiltonfunktion konvex, falls die
Funktion T auf ihrem Definitionsbereich konvex ist. Dies wird anhand folgender
Überlegungen nachgewiesen.
Zuerst betrachte man die Funktion F1 , die durch
F1 := (x1 + x2 )α1 xα3 2
definiert sei. Die Hesse-Matrix der Funktion F1 lautet:
α
α
(x1 +x2 )α1 x3 2
(x +x2 )α1 x3 2
α
(α
−
1)
α1 (α1 − 1) 1(x1 +x
1
1
2
2
)
(x
+x
)
2
1
2
α
α
(x1 +x2 )α1 x3 2
(x1 +x2 )α1 x3 2
∇2 F1 =
α
(α
−
1)
α
(α
−
1)
1
1
(x1 +x2 )2
(x1 +x2 )2
1 1
α
α
(x1 +x2 )α1 x3 2
(x1 +x2 )α1 x3 2
α1 α2 (x1 +x2 )x2
α1 α2 (x1 +x2 )x2
Oder mit den Bezeichnungen:
(x1 + x2 )α1 xα3 2
(x1 + x2 )2
(x1 + x2 )α1 xα3 2
b := α1 α2
(x1 + x2 )x2
(x1 + x2 )α1 xα3 2
c := α2 (α2 − 1)
x22
a := α1 (α1 − 1)
57
α
(x1 +x2 )α1 x3 2
(x1 +x2 )x2
α
(x1 +x2 )α1 x3 2
α1 α2 (x1 +x2 )x2
α
(x +x )α1 x 2
α2 (α2 − 1) 1 x2 2 3
2
α1 α2
.
6 Das modifizierte Modell von Lesourne und Leban
a a b
∇2 F1 := a a b .
b b c
Für die Trajektorien x1 (t), x2 (t), x3 (t) gilt für alle t ∈ [0, tf ] die Nichtnegativitätsbedingung. Aufgrund der Wahl der Parameter α1 = 0.35 und α2 = 0.5 gilt:
α1 − 1 < 0
und
α2 − 1 < 0.
Somit ergeben sich für die Komponenten der Hesse-Matrix der F1 Funktion folgende
Abschätzungen:
a < 0
b > 0
c < 0.
Da die Matrix ∇2 F1 symmetrisch ist, kann zur Überprüfung der Definitheit dieser Matrix das Eigenwertkriterium (4.2.14) benutzt werden. Man rechnet für die
Eigenwerte EW von ∇2 F1 leicht nach:
EW1 = 0
p
(2a − c)2 + 8b2
2a + c
−
EW2 =
2
2
p
(2a − c)2 + 8b2
2a + c
+
.
EW3 =
2
2
Aufgrund der Negativität von a und c folgt für EW2 unmittelbar EW2 ≤ 0. Für
EW3 gilt:
p
(2a − c)2 + 8b2
2a + c
EW3 =
+
≤0
2
p 2
(2a − c)2 + 8b2
2a + c
)≥
⇔ −(
2
2
p
⇔ −(2a + c) ≥ (2a − c)2 + 8b2
⇔ (2a + c)2 ≥ (2a − c)2 + 8b2
⇔ (2a + c)2 ≥ (2a + c)2 − 8ac + 8b2
⇔ 0 ≥ −8ac + 8b2
⇔ 0 ≥ −ac + b2 .
Die letzte Ungleichung wird mit den gewählten Parametern erfüllt, denn es gilt:
F1
−ac + b2 = −α1 (α1 − 1)α2 (α2 − 1) + α12 α22
{z
} (x1 + x2 )2 x23
|
{z
}
|
:=−0.02625
≥0
58
6 Das modifizierte Modell von Lesourne und Leban
Die Eigenwerte EW der Hesse-Matrix sind also kleiner bzw. gleich Null. Damit ist
die Funktion F1 laut Satz (4.2.14) konkav in x.
Des Weiteren ist die Differenz:
(λ1 − λ2 )
wegen λ1 < 0, λ2 ≥ 0 auf dem gesamten Zeitintervall [0, tf ] negativ. Die Parameter
(1 − τ ), p und α sind positive Konstanten. Demnach ist T konvex in x. Somit ist die
Hamiltonfunktion konvex in x und u.
Alle Voraussetzungen von Satz (4.4.1) sind erfüllt und ein Paar (x∗ , u∗ ), welches
den notwendigen Bedingungen des erweiterten Pontryaginschen Minimumprinzips
genügt, ist optimal.
Interpretation der Ergebnisse
Die erhaltene Lösung des modifizierten Modells von Lesourne und Leban zeigt, dass
bei Anwendung der optimalen Strategie die Verschuldungsbeschränkung sehr früh
aktiv wird. Der Anfangsbestand von 100 GE an Eigenkapital wird schnell abgebaut
und der Fremdkapitalbestand rasch aufgebaut, bis man bei maximaler Fremdkapitalaufnahme von x2 = κx1 angelangt ist. Außerdem erfolgt in der Zeit maximale Auszahlung der Dividenden, u∗3 = u3max . Danach (im Zeitraum [t2 , t3 ]) wird der gesamte
Kapitalstock x1 + x2 des Unternehmens solange verringert bis die optimalen Werte
von ungefähr 39 GE an x1 und 31 GE an x2 erreicht sind. Dieses Verhalten weist eindeutig darauf hin, dass die gewählten Anfangswerte der beiden Kapitalbestände viel
zu hoch sind. In den ersten zwei Jahren (bis t3 = 1.76) werden keine Investitionen
getätigt (u∗2 = u2min = 0). Es findet eine sehr hohe Dividendenausschüttung statt
und die anfängliche Fremdkapitalaufnahme kann damit erklärt werden, dass es für
die Eigenkapitalgeber stets von Vorteil ist, die maximale Verschuldungsmöglichkeit
auszuschöpfen. Denn deren Kalkulationszinssatz r = 0.112 liegt deutlich über dem
Fremdkapitalzins ρk = 0.11. Demnach ist es für die Unternehmenseigner günstiger“
”
Fremdkapital aufzunehmen als Eigenkapital zu verarbeiten. Genau dies begründet
auch das Aktivsein der Verschuldungsbeschränkung (fast) auf der ganzen Planungsperiode.
Sobald der optimale Kapitalstock erreicht ist, werden alle Größen auf einem konstanten Wert gehalten. Auch an der Anzahl der Beschäftigten x2 ändert sich in dieser
Zeitspanne [t3 , t4 ] nichts. Es finden fortwährend gleich bleibende Investitionen von
annährend 30.8 GE sowie Dividendenauszahlungen in Höhe von ca. 13 GE statt.
Schließlich kann gegen Ende der Planungsperiode wiederum ein deutlicher Abbau
an allen dem Unternehmen zur Verfügung stehenden Kapitalbeständen beobachtet werden. Die beiden Zustandsvariablen x1 , x2 fallen monoton. Das Verhalten der
59
6 Das modifizierte Modell von Lesourne und Leban
optimalen Steuerungen und Trajektorien auf [t4 , tf ] hängt offensichtlich mit dem
anvisierten Ziel, die diskontierten Dividendenauszahlungen in tf zu maximieren, zusammen. Die Investitionsrate u∗2 springt in t4 erneut auf Null, wo sie auch auf dem
letzten Zeitintervall [t4 , tf ] bleibt. Außerdem nimmt die Beschäftigungsänderung u∗1
negative Werte an, d. h. die Anzahl der Arbeitskräfte wird reduziert. Dies sieht man
selbstverständlich auch an dem Grafen der optimalen Beschäftigung x2 .
Der Wert des betragsmäßig zu minimierenden Zielfunktionswerts liegt bei |148.06047|
GE.
60
7 Ein komplexes
Unternehmensmodell
In diesem Kapitel geht es um die Lösung eines komplexen Unternehmensmodells,
welches von B. Koslik in [7] aufgestellt wurde. Dabei handelt es sich um ein ökonomisches Modell mit vier linear auftretenden Steuerungen, sieben Zustandsvariablen
und zwei aktiven Zustandsbeschränkungen.
Bei der Modellierung des komplexen Unternehmensproblems war man bemüht, ausgehend von dem Beispiel von Lesourne und Leban, einen optimalen Steuerprozess
aufzustellen, welcher die realen wirtschaftlichen Vorgänge möglichst gut abbildet.
Dabei wurde das ursprüngliche Modell, das nur die Kapitalstruktur eines Unternehmens einbezieht, um die Größen aus dem Beschäftigungs- und Produktionsbereich
erweitert. Zusätzlich wurden die konjunkturellen Schwankungen in den Zinssätzen
und in der Inflationsrate berücksichtigt. Das so entstandene sehr realitätsnahe Modell erlaubt die Wiedergabe und Erklärung bekannter realer Phänomene.
In der Diplomarbeit von B. Koslik wurden zur Vermeidung von Oszillationen die
wirksamen Zustandsbeschränkungen in härtere Steuerungsbeschränkungen transformiert. Hier aber wird komplexes Unternehmensmodell unter Berücksichtigung der
beiden reinen Zustandsbeschränkungen behandelt. Außerdem wird anstatt konstanter Lohnkosten mit im laufe der Zeit steigenden Lohnkosten gerechnet.
In dieser Arbeit werden erst die Lösungen des komplexen Modells bei variierendem
sowie bei konstantem Produktpreis vorgestellt und miteinander verglichen. Anschließend wird am Fall des variierenden Preises gezeigt, dass sich bei einer Verdoppelung
der Planungsperiode an dem optimalen Verhalten nur wenig ändert.
7.1 Beschreibung des komplexen
Unternehmensmodells
In diesem Abschnitt werden zunächst die wichtigsten Erweiterungen von dem Modell von Lesourne und Leban auf komplexes Unternehmensmodell kurz erläutert.
Da es sehr unwahrscheinlich ist, dass ein Unternehmen seine gesamten Produkti61
7 Ein komplexes Unternehmensmodell
onsgüter sofort auf dem Markt absetzen kann, wird in dem komplexen Problem
die Möglichkeit der Lagerhaltung der produzierten Güter berücksichtigt. Der Lagerbestand x1 (t) kann durch die neue Steuerungsvariable u1 (t), die Lageränderung,
organisiert werden:
ẋ1 (t) = u1 (t).
Für den Lagerbestand x1 (t) werden minimaler x1min und maximaler Wert x1max
eingeführt. Denn um eventuellen Engpässen bei der Nachfrage entgegen zu steuern,
muss ein Mindestbestand definiert werden. Zudem kann nur eine begrenzte Menge
an Waren deponiert werden.
Des Weiteren geht die Beschäftigung x2 (t) wie schon im modifizierten Modell in das
dynamische System als eine Zustandsvariable, die über die Beschäftigungsänderung
u2 (t) gesteuert wird, ein:
ẋ2 (t) = u2 (t).
Einen großen Vorteil des komplexen Unternehmensmodells bildet die genauere Differenzierung im Finanzierungsbereich. So wird hier, im Gegensatz zu dem Ursprungsmodell, zwischen der Fremdkapitaländerung u3 (t) und der Eigenkapitaländerung
u4 (t) als Steuerungsmaßnahmen des Geldflusses unterschieden. Die Dividendenauszahlung ist trivialerweise in der Eigenkapitaländerung enthalten. Zudem beinhaltet
der Zustandsvektor die neuen Größen: alternative (sichere) Anlagen x5 (t) und Risikozahlung x6 (t). Während durch die Fremdkapitaländerung der Aufbau/Abbau
(u3 (t) > 0/u3 (t) < 0) des Fremdkapitalbestandes x3 (t) geregelt wird, wird mittels
der neuen Steuerung, Eigenkapitaländerung, das Eigenkapital x4 (t) auf die Investitionen (u4 (t) > 0) in das eigene Unternehmen oder in die alternativen Anlagen
(u4 (t) < 0) unterteilt. Die Entwicklung der vier Kapitalgrößen unterliegt der folgenden Dynamik:
ẋ3 (t) = u3 (t)
ẋ4 (t) = u4 (t) + (1 − τ )(G(t) − ρr (t)x4 (t))
ẋ5 (t) = −u4 + (1 − τ )ρm (t)x5 (t)
ẋ6 (t) = (1 − τ )ρr (t)x4 (t).
Dabei ist G(t) die Gewinnfunktion des Unternehmens mit
G(t) =
1
((p(t)(F (t) − u1 (t)) − σx1 (t) − ωx2 (t)) − ρk (t)x3 (t) − δ(x3 (t) + x4 (t))
x7 (t)
und F (t) die Cobb-Douglas-Produktionsfunktion
F = α(x3 (t) + x4 (t))α1 xα2 2 (t),
α, α1 , α2 > 0
62
α1 + α2 < 1.
7 Ein komplexes Unternehmensmodell
2.45
2.4
2.35
2.3
2.25
2.2
2.15
2.1
2.05
2
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.1: Die steigende Lohnkostenfunktion
Durch σ werden die jährlichen Lagerhaltungskosten pro aufbewahrte Einheit gegeben und durch ω die jährliche Lohnrate. δ steht für die Abschreibungsrate auf das
Kapital und τ für den Steuersatz. Mit ρk wird der Fremdkapitalzins, mit ρm der
Geldmarktzins und mit ρr die Risikoversicherung der Eigenkapitalgeber bezeichnet.
Schließlich sind α, α1 , α2 produktionsspezifische Parameter und p der Preis, zu dem
die Ware auf dem Markt abgesetzt wird.
Für numerische Berechnungen müssen für alle diese Parameter konkrete Werte vorgegeben werden. Dabei gilt, je realitätsnäher diese gewählt werden, desto realitätsnäher
und aussagekräftiger sind die Ergebnisse. Aus diesem Grunde wurden bei der Modellierung des vorliegenden Beispiels für den Fremdkapitalzinssatz und den Geldmarktzinssatz reale ökonomische Werte eingesetzt. Diese wurden durch trigonometrische
Funktionen approximiert. Bei der ersten Lösung des Problems in der Diplomarbeit
von B. Koslik wurden die übrigen Parameter, um das Problem nicht zu komplex
zu gestalten, auf der ganzen Planungsperiode als konstante Größen gesetzt. Dies ist
jedoch nicht sehr wirklichkeitsnahe. Deswegen wird z. B. in der später erschienen
Publikation [18] von S. Winderl und B. Naumer dieses komplexe Unternehmensmodell mit einer variierenden Preisfunktion p(t) bearbeitet.
Um das Modell weiter den herrschenden Marktverhältnissen anzupassen, wird in
dieser Arbeit statt konstanter Lohnkosten ω = 2.0 eine steigende Lohnkostenfunktion eingeführt. Diese soll sich gemäß der folgenden exponentiellen Funktion, die sich
durch strenges monotones Wachstum auszeichnet, entwickeln:
ω(t) = 2.0 exp(0.02t).
Für alle anderen Parameter werden die Werte aus [7] bzw. [18] übernommen. Diese sind in der Tabelle (7.1) zusammengefasst. Dabei werden in den nachfolgenden
Abschnitten die Lösungen für den Fall der konstanten Preisfunktion p1 (t) ≡ 0.05
und der variierenden Preisfunktion p2 (t) = 0.05 + 0.01 sin(kp − π2 ) bei steigenden
63
7 Ein komplexes Unternehmensmodell
Lohnkosten diskutiert. Zunächst soll jedoch das Modell weiter beschrieben werden.
Ein großer Nachteil des Modells von Lesourne und Leban ist, dass die Inflation
vernachlässigt wird. Im komplexen Unternehmensmodell dagegen werden die permanenten Schwankungen des Marktes mit einkalkuliert. Dazu wird die Diskontierungsfunktion, die in der Wirtschaft folgendermaßen definiert ist,
x7 (t) =
1
,
(1 + i)t
x7 (0) = 1,
als zusätzliche Zustandsvariable, um die zeitabhängige Inflationsrate zu ermöglichen,
eingeführt. Nach der Definition des Differenzquotients gilt
x7 (t + dt) − x7 (t)
dt→0
dt
x˙7 = lim
und wegen
x7 (t + dt) = (1 + i)−(t+dt) =
= x7 (t)(1 + i)−dt =
dt(dt + 1) 2 dt(dt + 1)(dt + 2) 3
·i −
· i + ... =
= x7 (t) 1 − dt · i +
2!
3!
i2 i3
2
= x7 (t) 1 − dt i − + − . . . + O(dt ) =
2
3
= x7 (t) − dt · x7 (t) ln(1 + i) + O(dt2 ),
da − 1 < i ≤ 1
folgt für dt → 0
ẋ7 (t) = −x7 (t)ln(1 + i(t)).
Als neue zu maximierende Größe wird der Gewinn der Eigenkapitalgeber am Ende
des Planungszeitraumes gesetzt. Dieser entspricht der Summe aus dem Eigenkapital, den sicheren Anlagen und dem besteuerten Verkaufswert des Lagerbestandes,
bezogen auf den Endzeitpunkt tf :
x4 (tf ) + x5 (tf ) + (1 − τ )p
x1 (tf )
.
x7 (tf )
Alle vier Steuerungen des komplexen Unternehmensmodells sind sowohl nach unten
als auch nach oben begrenzt. Denn unbeschränkte Lager, - Beschäftigungs, - Fremdkapital, - Eigenkapitaländerung sind realitätsfremd. An alle Zustandsvariablen wird
erneut die Nicht-Negativitätsforderung gestellt. Außerdem wird die Beschränkung
des maximalen Verschuldungsgrades
κx4 (t) − x3 (t) ≥ 0
aus dem Modell von Lesourne und Leban übernommen.
64
7 Ein komplexes Unternehmensmodell
Risikozahlung
x6
M
A
u4
Eigenkapital
x4
u3
Sichere Anlagen
x5
Fremdkapital
x3
R
Produktion
F (x2 , x3 , x4 )
u1
K
T
u2
Lagerbestand
x1
Beschäftigung
x2
Abbildung 7.2: Veranschaulichung des komplexen Unternehmensmodells
65
7 Ein komplexes Unternehmensmodell
7.2 Formulierung des komplexen Steuerungsproblems
Mit den Bezeichnungen
x1 (t) : Lagerbestand
x2 (t) : Beschäftigung
x3 (t) : Fremdkapital
x4 (t) : Eigenkapital
x5 (t) : sichere Anlagen
x6 (t) : Risikozahlung
x7 (t) : Diskontierungsfunktion
u1 (t) : Lagerbestandsänderung
u2 (t) : Beschäftigungsänderung
u3 (t) : Fremdkapitaländerung
u4 (t) : Eigenkapitaländerung
für den Zustandsvektor
x(t)T = (x1 (t), x2 (t), x3 (t), x4 (t), x5 (t), x6 (t), x7 (t))
und die Steuerfunkftion
u(t)T = (u1 (t), u2 (t), u3 (t), u4 (t))
kann nun das komplexe Unternehmensmodell folgendermaßen formuliert werden:
Minimiere:
x1 (tf )
− x4 (tf ) + x5 (tf ) + (1 − τ )p
x7 (tf )
unter:
ẋ1 = u1
ẋ2 = u2
ẋ3 = u3
ẋ4 = u4 + (1 − τ )(G − ρr (t)x4 )
ẋ5 = −u4 + (1 − τ )ρm (t)x5
ẋ6 = (1 − τ )ρr (t)x4
ẋ7 = −x7 ln(1 + i(t))
mit der Gewinnfunktion
G(t) =
1
((p(t)(F − u1 ) − σx1 − ω(t)x2 ) − ρk (t)x3 − δ(x3 + x4 )
x7
66
7 Ein komplexes Unternehmensmodell
und der Cobb-Douglas-Produktionsfunktion
F = α(x3 + x4 )α1 xα2 2 ,
α, α1 , α2 > 0
α1 + α2 < 1
Steuerbeschränkungen:
−100 ≤ u1 ≤ 100
−10 ≤ u2 ≤ 10
−100 ≤ u3 ≤ 100
−100 ≤ u4 ≤ 100
Zustandsbeschränkungen:
50 := x1min ≤
x1
0≤
x2
0≤
x3
0≤
x5
0≤
x6
0≤
x7
≤ x1max := 200
0 ≤ κx4 − x3
Randbedingungen:
x1 (0) = 100 , x2 (0) = 30
x3 (0) = 50 , x4 (0) = 100
x5 (0) = 100 , x6 (0) = 0
x7 (0) = 1
Die Bedeutung der Parameter und die in dieser Arbeit verwendeten Werte sind
der Tabelle (7.1) zu entnehmen. Zudem beachte man bei der Schreibweise des optimalen Steuerprozesses, dass die Zustandsvariablen, die Steuerungsvariablen sowie
die Gewinn- und die Produktionsfunktion von der Zeit t abhängen. Dies wird jedoch aus Gründen der besseren Lesbarkeit im weiteren Verlauf der Arbeit nicht
explizit erwähnt. Um Verwirrungen zu vermeiden, wird bei den übrigen ökonomischen Größen, falls diese mit der Zeit t variieren (z. B. die Umlaufrendite), die
Zeitabhängigkeit ausdrücklich genannt.
67
7 Ein komplexes Unternehmensmodell
tf
p1
p2
κ
ω
δ
τ
σ
α
α1
α2
kl
kp (t)
10
0.05
0.05 + 0.01 sin(kp − π2 )
0.8
2.0 exp(0.02t)
0.322
0.5
0.01
100
0.35
0.5
8
π
+ 2π
·t
2
kl
Planungszeitraum
konstanter Produktpreis
variierender Produktpreis
maximaler Verschuldungsgrad
jährliche Lohnrate
Abschreibungsrate 2
Steuersatz
Lagerhaltungskosten
Effizienzparameter
Produktionselastizität des Kapitals
Produktionselastizität der Arbeit
Konjukturzykluslänge
Konjukturposition
i(t)
ρk (t)
ρm (t)
ρr (t)
0.019 + 0.029 sin kp (t)
0.110 + 0.030 sin kp (t)
0.074 + 0.018 sin kp (t)
ρk (t) − 0.05
Inflationsrate
Fremdkapitalzins
Geldmarktzins
Risikoversicherung für risikoscheue EKG.
Tabelle 7.1: Liste der Parameter des komplexen Unternehmensmodells
7.3 Auswertung des erweiterten Minimumprinzips
Bevor in den nachfolgenden Abschnitten die Lösungen des komplexen Unternehmensmodells für verschiedene Parameter vorgestellt und ausdiskutiert werden, werden hier vorab die notwendigen Optimalitätsbedingungen für das vorliegende Beispiel aufgestellt. Zur Behandlung der Randstücke wird die direkte Methode verwendet.
Die Hamilton-Funktion des betrachteten Problems lautet:
λ4 (1 − τ )
(pα(x3 + x4 )α1 xα2 2 − pu1 − x1 σ − x2 ω)
H = λ 1 u1 + λ 2 u2 + λ 3 u3 + λ 4 u4 +
x7
− λ4 (1 − τ ) (x3 (ρk (t) + δ) − x4 (ρr (t) + δ)) − λ5 (u4 − x5 (1 − τ )ρm (t))
+ λ6 (1 − τ )ρr (t)x4 − λ7 x7 ln(1 + i(t)).
An die Variablen des komplexen Unternehmensmodells werden mehrere Zustandsbeschränkungen gestellt (siehe Abschnitt 7.2), doch nur die Beschränkungen des
maximalen Verschuldungsgrades
S1 := x3 − κx4 ≤ 0
68
(7.1)
7 Ein komplexes Unternehmensmodell
und des minimalen Lagerbestandes
S2 = 50 − x1 ≤ 0
(7.2)
werden aktiv. Somit können alle anderen außer Acht gelassen werden. Beide Beschränkungen sind von der Ordnung p = 1. Denn für die Verschuldungsbeschränkung
gilt:
S11 = x˙3 − κẋ4
(7.3)
= u3 − κ(u4 + (1 − τ )(G − ρr (t)x4 )),
und für den minimalen Lagerbestand egibt sich:
S21 = −ẋ1 = −u1 .
(7.4)
In beiden Fällen tauchen die Steuerungsvariablen schon in der ersten Ableitung
explizit auf.
Für die erweiterte Hamiltonfunktion ergibt sich:
λ4 (1 − τ )
(pα(x3 + x4 )α1 xα2 2 − pu1
x7
− x1 σ − x2 ω) − λ4 (1 − τ ) (x3 (ρk (t) + δ) − x4 (ρr (t) + δ)))
H̃ = u1 λ1 + u2 λ2 + u3 λ3 + u4 λ4 +
− λ5 (u4 − x5 (1 − τ )ρm (t)) + x4 λ6 (1 − τ )ρr (t)
− x7 λ7 ln(1 + i(t)) + µ1 (x3 − κx4 ) + µ2 (50 − x1 ).
Die adjungierten Differentialgleichungen für den zustandsbeschränkten Steuerprozess lauten:
λ4 (1 − τ )σ
− µ2
x7
α2 λ4 (1 − τ )
α1 x 2
=
ω − pαα2 (x3 + x4 )
x7
x2
p
(x3 + x4 )α1 α2
= λ4 (1 − τ ) ρk (t) + δ − αα1
+ µ1
x
x7
(x3 + x4 ) 2
(x3 + x4 )α1 α2
p
− κµ1
x
= (1 − τ ) λ4 (ρr (t) + δ) − λ6 ρr (t) − λ4 αα1
x7
(x3 + x4 ) 2
λ̇1 =
λ̇2
λ̇3
λ̇4
λ̇5 = −λ5 (1 − τ )ρm (t)
λ̇6 = 0
λ̇7 = λ7 ln(1 + i(t)) +
λ4 (1 − τ )
(pF − pu1 − x1 σ − x2 ω) .
x27
69
7 Ein komplexes Unternehmensmodell
Zudem ergeben sich durch partielle Differentation von H̃ nach u folgende Schaltfunktionen:
Σ1 (t) = λ1 −
(1 − τ )λ4 p
x7
Σ2 (t) = λ2
Σ3 (t) = λ3
Σ4 (t) = λ4 − λ5 .
Nach dem Minimumprinzip wird die erweiterte Hamiltonfunktion durch die Steuerung u minimiert, d. h. für die optimalen Steuerungen des komplexen Unternehmensmodell gilt:
, Σi (t) > 0
uimin
∗
ui (t) =
i = 1, 2, 3, 4.
(7.5)
uimax
, Σi (t) < 0 ,
unbestimmt , Σi (t) = 0
Ein Schaltpunkt tk wird durch die Bedingung Σi (tk ) = 0 festgelegt.
Die beiden Multiplikatorfunktionen µ1 (t) und µ2 (t) müssen die Vorzeichen-/Komplementaritätsbedingung erfüllen:
µ1 (t) ≥ 0;
µ1 (t) ≡ 0,
f alls S1 (x∗ (t)) < 0
µ2 (t) ≥ 0;
µ2 (t) ≡ 0,
f alls S2 (x∗ (t)) < 0.
Da beide Beschränkungen zum Endzeitpunkt tf aktiv sind, führt die Transversalitätsbedingung für zustandsbeschränkte Probleme auf folgende Endbedingungen
für die adjungierten Variablen:
λ1 (tf ) = −
(1 − τ )p
− γ1
x7
λ2 (tf ) = 0
λ3 (tf ) = γ2
λ4 (tf ) = −1 − κγ2
λ5 (tf ) = −1
λ6 (tf ) = 0
(1 − τ )x1 (tf )p
λ7 (tf ) =
x27 (tf )
mit γ1 , γ2 ∈ R und γ1 , γ2 ≥ 0.
70
(7.6)
7 Ein komplexes Unternehmensmodell
N=5000
LOQO(Euler-Verfahren)
LOQO(Heun-Verfahren)
IPOPT(Euler-Verfahren )
IPOPT(Heun-Verfahren)
konstanter Preis variierender Preis
7.39 sec.
23.64 sec.
25.23 sec.
247.88 sec.
11.88 sec.
37.45 sec.
45.96 sec.
5108.94 sec.
tf = 20
9.75 sec.
39.08 sec.
282.02 sec.
566.57 sec.
Tabelle 7.2: Vergleich der Rechenzeiten für unterschiedliche Parameter bei 5000 Diskretisierungspunkten.
7.4 Numerische Ergebnisse
Bei dem Versuch eine numerische Lösung des vorliegenden Problems zu erstellen,
wurde zunächst die Fortran-Routine NUDOCCCS, die zu direkten numerischen
Lösungsmethoden der optimalen Steuerprozesse zählt, eingesetzt. Leider lieferte diese keine brauchbaren Ergebnisse, denn die Struktur der optimalen Steuerungen war
nicht erkennbar. Auch die Wahl größerer Anzahl der Diskretisierungspunkte sowie
Verfahren höherer Ordnung zur Approximation der Zustände (wie z.B. das RungeKutta-Verfahren) halfen nicht weiter. Schließlich ist es nach Überwindung einiger
Schwierigkeiten gelungen das Problem in diskretisierter Form mit dem Optimierungssolver LOQO zu lösen. So mussten z. B. die Anfanswerte der Zustände schon
bei deren Deklaration angegeben werden. Diese Lösungen wurden auch hinterher
durch das Optimierungspaket IPOPT bestätigt. Dabei wurde erst einmal zur Approximation des Zustandes das Euler-Verfahren verwendet und anschließend auch
das Heun-Verfahren. In der Tabelle (7.2) sind zum Vergleich die Rechenzeiten beider
Verfahren für unterschiedliche Parameter bei 5000 Diskretisierungspunkten angegeben.
Alle erstellten Programme sind auf einer CD am Ende dieser Arbeit beigefügt. Außerdem sind zwei (Approximation der Zustände mit Euler und Heun Verfahren)
ausgewählte Beispiele des AMPL-Codes im Anhang zu finden.
7.4.1 Optimale Steuerung des komplexen Unternehmensmodells
bei variierendem Preis
Als erstes wird die Lösung des komplexen Modells im Falle eines schwankenden
Preises vorgestellt. Der Verlauf der Preisfunktion p2 (t) ist in der Abbildung (7.27)
zu sehen. Die Schaltstruktur der optimalen Steuerungen u∗1 , u∗2 , u∗3 , u∗4 für dieses
Problem ist in der Tabelle (7.3) zusammengefasst. Die Grafen der optimalen Trajektorien, der Adjungierten, der optimalen Steuerungen, sowie die Grafen der Schaltund der Multiplikatorfunktionen sind in den Abbildungen (7.3)-(7.26) zu sehen.
71
7 Ein komplexes Unternehmensmodell
65
Lagerbestand
Beschaeftigung
100
60
55
80
50
45
60
40
35
40
30
25
0
1
2
3
4
5
6
7
8
9
10
0
2
4
6
8
10
Abbildung 7.3: x1 bei variierendem Preis Abbildung 7.6: x2 bei variierendem Preis
180
220
Fremdkapital
Eigenkapital
200
160
180
140
160
120
140
100
120
80
100
60
80
40
60
20
40
0
2
4
6
8
10
0
2
4
6
8
10
Abbildung 7.4: x3 bei variierendem Preis Abbildung 7.7: x4 bei variierendem Preis
400
40
sichere Anlagen
Risikoabsicherung
350
30
300
250
20
200
10
150
100
0
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.5: x5 bei variierendem Preis Abbildung 7.8: x6 bei variierendem Preis
72
7 Ein komplexes Unternehmensmodell
1
-0.024
Diskontierung
-0.026
-0.028
0.95
-0.03
-0.032
0.9
-0.034
-0.036
-0.038
0.85
-0.04
-0.042
0.8
-0.044
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
Abbildung 7.9: x7 bei variierendem Preis Abbildung 7.12: λ1 bei
Preis
0.4
8
9
10
variierendem
0.006
0.2
0.005
0
0.004
-0.2
-0.4
0.003
-0.6
0.002
-0.8
-1
0.001
-1.2
0
-1.4
-1.6
-0.001
0
1
2
3
4
5
6
7
Abbildung 7.10: λ2 bei
Preis
8
9
10
0
1
2
3
4
5
6
7
8
9
10
variierendem Abbildung 7.13: λ3 beim variierenden
Preis
-1
-1.05
-1.1
-1.15
-1.2
-1.25
-1.3
-1.35
-1.4
-1.45
-1.5
0
1
2
3
4
5
6
Abbildung 7.11: λ4 bei
Preis
7
8
9
10
0
1
2
3
4
5
6
variierendem Abbildung 7.14: λ5 bei
Preis
73
7
8
9
10
variierendem
7 Ein komplexes Unternehmensmodell
0.5
1000
800
0.25
600
0
400
-0.25
200
-0.5
0
0
1
2
3
4
5
6
7
Abbildung 7.15: λ6 bei
Preis
8
9
10
0
2
3
4
5
6
7
variierendem Abbildung 7.18: λ7 bei
Preis
Lagerveraenderung
100
1
8
9
10
variierendem
Besch.veraenderung
10
8
75
6
50
4
25
2
0
0
-2
-25
-4
-50
-6
-75
-8
-100
-10
0
1
2
3
4
5
6
7
Abbildung 7.16: u1 bei
Preis
8
9
10
0
1
2
3
4
5
6
7
variierendem Abbildung 7.19: u2 bei
Preis
FK-Veraenderug
100
75
50
50
25
25
0
0
-25
-25
-50
-50
-75
-75
-100
9
10
variierendem
Investition
100
75
8
-100
0
1
2
3
4
5
6
Abbildung 7.17: u3 bei
Preis
7
8
9
10
0
1
2
3
4
5
6
variierendem Abbildung 7.20: u4 bei
Preis
74
7
8
9
10
variierendem
7 Ein komplexes Unternehmensmodell
0.0035
0.4
0.2
0.003
0
0.0025
-0.2
0.002
-0.4
0.0015
-0.6
-0.8
0.001
-1
0.0005
-1.2
0
-1.4
-0.0005
-1.6
0
1
2
3
4
5
6
7
Abbildung 7.21: Σ1 bei
Preis
8
9
10
0
1
2
3
4
5
6
7
variierendem Abbildung 7.24: Σ2 bei
Preis
0.006
8
9
10
variierendem
0.018
0.016
0.005
0.014
0.004
0.012
0.01
0.003
0.008
0.002
0.006
0.004
0.001
0.002
0
0
-0.001
-0.002
0
1
2
3
4
5
6
7
Abbildung 7.22: Σ3 bei
Preis
8
9
10
0
1
2
3
4
5
6
7
variierendem Abbildung 7.25: Σ4 bei
Preis
0.018
8
9
10
variierendem
0.014
0.016
0.012
0.014
0.01
0.012
0.008
0.01
0.008
0.006
0.006
0.004
0.004
0.002
0.002
0
0
0
1
2
3
4
5
6
Abbildung 7.23: µ1 bei
Preis
7
8
9
10
0
1
2
3
4
5
6
variierendem Abbildung 7.26: µ2 bei
Preis
75
7
8
9
10
variierendem
7 Ein komplexes Unternehmensmodell
t
u∗1
[0.0000,0.16603] u1min
[0.1660,0.3947 ] u1min
[0.3947,0.4998 ] u1min
[0.4981,2.8529 ]
0
[2.8529,6.1988 ]
0
[6.1988,10.000 ]
0
u∗2
u∗3
u∗4
u2max
u2max
u2max
u2max
u2min
u2max
u3min
u3max
singulär
singulär
singulär
singulär
u4min
u4min
singulär
singulär
singulär
singulär
x1 − 50 ≤ 0 x3 − 0.8x4 ≤ 0
n.a.
n.a.
n.a.
a.
a.
a.
n.a
n.a.
a.
a.
a.
a.
Tabelle 7.3: Schaltstruktur der optimalen Steuerungen bei variierendem Preis
Zunächst wird geprüft, ob die vorliegende Lösung das (erweiterte) Pontryaginsche
Minimumprinzip nicht verletzt. Hierzu werden, wie schon beim modifizierten Problem, die notwendigen Optimalitätsbedingungen auf jedem Zeitintervall ausgewertet.
1. Zeitintervall [0, t1 ]
In diesem Intervall ist weder die Lagerbeschränkung noch die Verschuldungsbeschränkung aktiv. Es gilt nach der Komplementaritätsbedingung µ1 (t) = 0 und
µ2 (t) = 0 für alle t in [0, t1 ], dieses wird auch durch die Grafen der beiden Multiplikatorfunktionen in den Abbildungen 7.23, 7.26 bestätigt.
Alle vier Steuerungen weisen eine Bang-Bang-Struktur auf. Es gilt:
Σ1 (t) > 0
∀ t ∈ [0, t1 ),
⇒ u∗1 = u1min
Σ2 (t) < 0
∀ t ∈ [0, t1 ),
⇒ u∗2 = u2max
Σ3 (t) > 0
∀ t ∈ [0, t1 ),
⇒ u∗3 = u3min
Σ4 (t) > 0
∀ t ∈ [0, t1 ),
⇒ u∗4 = u4min .
2. Zeitintervall [t1 , t2 ]
Im ersten Schaltpunkt t1 = 0.16603 springt die Steuerung u∗3 von u3min auf u3max .
Die Schaltfunktion Σ3 (t) hat in t1 eine isolierte Nullstelle, Σ3 (t1 ) = 0. Die Minimumbedingung wird auch hier eingehalten, denn alle vier Schaltfunktionen weisen
folgenden Verlauf auf:
Σ1 (t) > 0
∀ t ∈ [t1 , t2 ],
Σ2 (t) < 0
∀ t ∈ [t1 , t2 ],
Σ3 (t) < 0
∀ t ∈ (t1 , t2 ),
Σ4 (t) > 0
∀ t ∈ [t1 , t2 ].
76
7 Ein komplexes Unternehmensmodell
0.06
0.058
0.056
0.054
0.052
0.05
0.048
0.046
0.044
0.042
0.04
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.27: Variierende Preisfunktion p2 (t).
Beide Beschränkungen sind inaktiv. Die Werte der Multiplikatorenfunktionen µ1 (t),
µ2 (t) liegen für alle t in [t1 , t2 ) bei Null.
3. Zeitintervall [t2 , t3 ]
Der Zeitpunkt t2 = 0.3947 ist der Eintrittspunkt der Verschuldungsbeschränkung.
Diese wird in t2 aktiv und bleibt es bis zum Ende der Planungsperiode tf = 10, d. h.
es gilt:
x3 − κx4 = 0,
∀ t ∈ [t2 , tf ].
Die optimale Trajektorie von x3 kann also in Abhängigkeit von x4 angegeben werden.
Die Steuerungen u∗3 , u∗4 nehmen in t2 = 0.3947 einen singulären Verlauf an. Die
notwendige Bedingung, die besagt, dass die Schaltfunktionen auf diesem Zeitintervall
verschwinden müssen, ist erfüllt.
Σ3 (t) = 0
∀ t ∈ [t2 , t3 ],
Σ4 (t) = 0
∀ t ∈ [t2 , t3 ].
Des Weiteren zeigen die Multiplikatorfunktionen folgenden Verlauf:
µ1 (t) ≥ 0
∀ t ∈ [t2 , tf ]
µ2 (t) = 0
∀ t ∈ [t2 , t3 ].
Die Funktion µ1 (t) kann mittels der Schaltfunktionen Σ3 (t) und Σ4 (t) bestimmt
werden, denn es gilt folgendes:
Σ3 (t) = λ3 = 0 ⇒ Σ̇3 (t) = λ̇3 = 0
Σ4 (t) = λ4 − λ5 = 0 ⇒ Σ̇4 (t) = λ̇4 − λ̇5 = 0.
77
7 Ein komplexes Unternehmensmodell
In den beiden Termen ist der Multiplikator µ1 enthalten und durch Auflösen nach
µ1 erhält man:
µ1 (t) =
(1 − τ )
[0.05λ4 + λ6 ρr (t) − λ5 ρm (t)] .
(1 + κ)
Für die optimalen Steuerungen u∗1 , u∗2 gilt auf diesem Stück weiterhin:
u∗1 = u1min
u∗2 = u2max ,
die jeweiligen Schaltfunktionen bleiben im positiven, bzw. negativen Bereich:
Σ1 (t) > 0
∀ t ∈ [t2 , t3 ],
Σ2 (t) < 0
∀ t ∈ [t2 , t3 ].
Im Abschnitt 7.3 wurde schon nachgerechnet, dass es sich bei der Verschuldungsbeschränkung um eine Zustandsbeschränkung erster Ordnung handelt. Nach (3.9) gilt
dann folgendes:
S(x) ≡ 0 ⇒ S 1 (x) ≡ 0 ⇒ ẋ3 − κẋ4 = u3 − κẋ4
⇒ u3 = κẋ4
⇒ u3 = κ(u4 + (1 − τ )(G − ρr (t)x4 ))
(7.7)
1
⇒ u3 = κ(u4 + (1 − τ )(( (p(t)(F − u1 ) − σx1 − ωx2 )
x7
− ρk (t)x3 − δ(x3 + x4 )) − ρr (t)x4 )).
Die Steuerung u∗3 kann auf dem Randstück in Abhängigkeit von u1 , u4 , xi ermittelt
werden.
u∗3 = κ(u4 + (1 − τ )((
1
(p2 (t)(α(x3 + x4 )α1 xα2 2 − u1 ) − σx1 − ωx2 ) − ρr (t)x4 )).
x7
Die oben berechnete Gleichung für die Steuerung u3 gilt auf dem gesamten Randstück
der Verschuldungsbeschränkung. Um u4 zu bestimmen, wird wiederum die Schaltfunktion Σ4 (t) solange differentiert bis die gesuchte Steuerung in der Ableitung auftaucht. In dem vorliegenden Beispiel ist das für k = 2, also q = 1 der Fall.
Σ4 (t) = λ4 − λ5 = 0,
⇒ λ̇4 − λ̇5 = 0,
⇒ λ̈4 − λ̈5 = 0,
78
∂
(λ4 − λ5 ) = 0
∂u
∂
(λ̇4 − λ̇5 ) = 0
∂u
∂ ¨
(λ4 ) 6= 0.
∂u
7 Ein komplexes Unternehmensmodell
Dies sieht man anhand folgender Berechnungen:
λ̈4 − λ̈5 = (1 − τ )[λ̇4 (ρr (t) + δ) + (λ4 − λ6 )ρ̇r (t) − λ̇5 ρm (t) − λ5 ρ̇m ]
i
h
λ̇
p(t)
+
λ
ṗ(t)
+
λ
p(t)ln(1
+
i(t))
4
4
α1 F (1 − τ ) 4
−
(x3 + x4 )
x7
λ4 p(t)
(α1 − 1)(u3 + u4 + (1 − τ )(G − ρr (t)x4 ))
− (1 − τ )
α1 F
x7
(x3 + x4 )2
α2 u2
λ4 p(t)
− κµ̇1
α1 F
− (1 − τ )
x7
(x3 + x4 )x2
Durch Auflösen der obigen Gleichung nach u4 erhält man:
(x3 + x4 )2
[λ̇4 (ρr (t) + δ) + (λ4 − λ6 )ρ̇r (t) − λ̇5 ρm (t) − λ5 ρ̇m ]
α1 (α1 − 1)p(t)λ4 F
"
#
(x3 + x4 )
λ̇4 p(t) + λ4 ṗ(t) + λ4 p(t)ln(1 + i(t))
−
(α1 − 1)p(t)λ4
x7
u4 =
(x3 + x4 ) λ4 α2 u2
(x3 + x4 )2
κµ̇1 − u3
(7.8)
−
(α1 − 1)λ4 x7 x2
α1 (α1 − 1)(1 − τ )p(t)λ4 F
1
+ (1 − τ )( ((p(t)(F − u1 ) − σx1 − ωx2 ) − ρk (t)x3 − δ(x3 + x4 ) − ρr (t)x4 ))
x7
−
Dabei gilt:
i
(1 − τ ) h
0.05λ̇4 + λ6 ρ̇r (t) − λ̇5 ρm (t) − λ5 ρ̇m (t)
(1 + κ)
π
π
ṗ(t) =
cos( t)
400
4
π
π π
ρ̇m (t) =
0.018 cos( + t)
4
2
4
π
π π
ρ̇r (t) =
0.030 cos( + t).
4
2
4
µ̇1 (t) =
4. Zeitintervall [t3 , t4 ]
In t3 = 0.4998 wird die Lagerbeschränkung
S2 = 50 − x1 ≤ 0,
welche von der Ordnung p = 1 ist, aktiv. Diese bleibt bis zum Ende der Planungsperiode tf = 10 in Kraft. Es gilt demnach x1 (t) = 50 für alle t ∈ [t3 , tf ].
Laut Bedingung (3.9) muss dann auch für alle t ∈ [t3 , tf ] folgendes erfüllt sein:
S21 = −ẋ1 = −u1 = 0.
79
7 Ein komplexes Unternehmensmodell
Außerdem gilt offensichtlich
∂S21
= −1 6= 0.
∂u1
Somit wird der optimale Verlauf der Steuerung u∗1 durch die Lagerbeschränkung
festgelegt:
u∗1 = 0 ∈ int U
∀ t ∈ [t3 , tf ].
(7.9)
Der Graf der Steuerung u∗1 (7.16) bestätigt dies, der Zeitpunkt t3 ist gleichzeitig
ein Schaltpunkt von u∗1 . Eine Randsteuerung verhält sich formal wie eine singuläre
Steuerung und die Schaltfunktion Σ1 (t) ist auf [t3 , tf ] überall gleich Null.
Des Weiteren sieht man in der Abbildung (7.26), dass die Multiplikatorfunktion
µ2 (t) die Vorzeichen-/Komplementaritätsbedingung tatsächlich erfüllt. Der Verlauf
von µ2 (t) auf [t3 , tf ] kann durch Differentation der Schaltfunktion Σ1 (t) bestimmt
werden. Man rechnet leicht nach:
i
(1 − τ ) h
λ̇4 p(t) + λ4 ṗ(t) + λ4 p(t)ln(1 + i(t)) = 0
Σ̇1 (t) = λ̇1 −
x7
i
(1 − τ ) h
λ4 (1 − τ )σ
− µ2 −
λ̇4 p(t) + λ4 ṗ(t) + λ4 p(t)ln(1 + i(t)) = 0
Σ̇1 (t) =
x7
x7
(1 − τ ) λ4 [σ − ṗ2 (t) − p2 (t)ln(1 + i(t))] − λ̇4 p2 (t) .
⇒ µ2 (t) =
x7
Für die Steuerung u∗2 gilt weiterhin u∗2 = u2max und die Steuerungen u∗3 , u∗4 zeigen
einen singulären Verlauf auf. Die Schaltfunktionen zeigen, dass die Minimumbedingung erfüllt ist.
Σ1 (t) = 0
∀ t ∈ [t3 , t4 ],
Σ2 (t) < 0
∀ t ∈ [t3 , t4 ),
Σ3 (t) = 0
∀ t ∈ [t3 , t4 ],
Σ3 (t) = 0
∀ t ∈ [t3 , t4 ].
Die Berechnungen, die für die beiden letzten Steuerungen im Zeitintervall [t2 , t3 ]
durchgeführt wurden, behalten ihre Gültigkeit. In den erhaltenen Gleichungen für
u∗3 , u∗4 muss jedoch der neue Wert der ersten Steuerung eingegeben werden.
Man beachte, dass der oben beschriebene Sachverhalt unabhängig von der Wahl der
Parameter immer seine Gültigkeit behält. Sobald die Lagerbeschränkung aktiv wird,
springt u∗1 auf Null.
4. Zeitintervall [t4 , t5 ]
Die Steuerung u∗2 , die bis t4 = 2.8529 konstant bei u2max lag, springt auf u2min . Die
Schaltfunktion von u∗2 hat in t4 eine isolierte Nullstelle, Σ2 (t4 ) = 0 und für t ∈ (t4 , t5 )
80
7 Ein komplexes Unternehmensmodell
gilt Σ2 (t) > 0. Die Schaltfunktionen von u1 , u3 , u4 verschwinden auch auf diesem
Zeitintervall. Der Verlauf der drei Steuerungen kann genau wie in den vorherigen
Intervallen bestimmt werden. Dabei muss in die Gleichung (7.8) von u∗4 der neue
Wert der Steuerung u∗2 eingesetzt werden. Diese Änderung der Steuerung u∗2 hat eine
direkte Auswirkung auf u∗3 und u∗4 . Der ausgerechnete Term für u∗3 hängt zwar nicht
von u∗2 ab, aber dafür von u∗4 . Beide Funktionen u∗3 , u∗4 weisen Unstetigkeitsstellen
in den Schaltpunkten von u∗2 , dies ist in den Grafen (7.17) und (7.20) deutlich zu
sehen.
5. Zeitintervall [t5 , tf ] mit tf = 10
Im letzten Zeitintervall springt u∗2 in t5 = 6.1988 erneut auf u2max . Es gilt:
Σ1 (t) = 0
∀ t ∈ [t4 , tf ],
Σ2 (t) > 0
∀ t ∈ (t5 , tf ) und Σ2 (t5 ) = 0,
Σ3 (t) = 0
∀ t ∈ [t4 , tf ],
Σ3 (t) = 0
∀ t ∈ [t4 , tf ].
Die Berechnung der singulären Steuerung erfolgt analog zum vorletzten Intervall. In
die Gleichung von u∗4 muss diesmal u∗2 = u2max eingesetzt werden.
Die Minimumbedingung sowie Vorzeichen- und Komplementaritätsbedingung werden also von der vorliegenden Lösung erfüllt. Es bleibt nur noch die Transversalitätsbedingung zu überprüfen.
Die Werte der adjungierten Variablen in tf = 10 lauten:
λ1 (tf ) = −0.03753,
λ2 (tf ) = 0,
λ3 (tf ) = 0,
λ4 (tf ) = −1,
λ5 (tf ) = −1,
λ6 (tf ) = 0,
λ7 (tf ) = 2.34.
Somit wird auch die Bedingung (7.6) mit γ1 = γ2 = 0 eingehalten.
Nachdem die notwendigen Optimalitätsbedingungen eingehend untersucht wurden,
müssten die hinreichenden Bedingungen überprüft werden. Doch leider gibt es in diesem Fall kein bekanntes Kriterium, welches zu Rate gezogen werden könnte. Obwohl
das komplexe Unternehmensmodell ausgehend vom Modell von Lesourne und Leban
konstruiert wurde, werden hier im Gegensatz zum Ursprungsmodell die zusätzlichen
Konvexitätsannahmen nicht erfüllt. Das neu gewählte Zielfunktional
x1 (tf )
− x4 (tf ) + x5 (tf ) + (1 − τ )p
x7 (tf )
81
7 Ein komplexes Unternehmensmodell
ist nicht konvex. Denn die Hesse Matrix der letzten Komponenten
!
1
0
−
2
x
1
x7
:=
∇2
.
2x1
1
x7
− x2 x3
7
x1 (tf )
x7 (tf )
lautet:
7
Diese Matrix ist symmetrisch und hat folgende Eigenwerte:
p
p
x1 − x21 + x27
x1 + x21 + x27
,
EW2 =
.
EW1 =
x37
x37
Wegen x1 > 0, x7 > 0 auf [0, tf ] gilt EW1 > 0 und EW2 < 0und nach Satz (4.2.14)
ist die Hesse- Matrix indefinit.
Man muss sich also beim komplexen Unternehmensmodell erst einmal mit den notwendigen Bedingungen zufrieden geben.
Interpretation der Ergebnisse
In der Wirtschaft spielen die individuellen Präferenzen eines Marktakteurs eine große
Rolle. Insbesondere wird das Verhalten der einzelnen Teilnehmer stark von deren Risikobereitschaft beeinflusst. Bei der Behandlung des komplexen Modells in dieser Arbeit wurde stets von den risikoscheuen Eigenkapitalgebern ausgegangen. Damit wird
diesen unterstellt, dass sie den Nutzen eines sicheren Ereignisses (z.B. Bundesanleihe) höher einschätzen als den Nutzen eines unsicheren Ereignisses. Eine Investition in
ein Unternehmen (auch das Eigene) ist in der Regel mit größeren Gefahren behaftet
als eine sichere Geldanlage und muss daher, um attraktiv zu sein, höhere Gewinne
abwerfen. Die erwartete Rendite lässt sich aus der Sicht der Eigenkapitalgeber als
Summe des Geldmartktzinses ρm und der verlangten Risikoversicherung ρr berechnen. Aufgrund der Risikoscheue der Eigenkapitalgeber liegt der Wert ρm + ρr , mit
den hier gewählten Funktionen ρm , ρr , allzeit über dem Fremdkapitalzinssatz ρk . Der
Profit der Unternehmenseigner wird also durch die Aufnahme vom Fremdkapital, das
sie für sich immer noch Gewinn bringend arbeiten lassen können, weiter gesteigert.
Dies spiegelt sich auch in der erhaltenen optimalen Strategie des Unternehmens wider. Denn sie besagt gerade, dass der maximale Verschuldungsgrad beinahe auf der
ganzen Planungsperiode, mit Ausnahme des ersten sehr kurzen Zeitintervalls [0, t2 ],
ausgeschöpft werden soll. Die kurze Einschwingphase der Kapitalbestände kann darauf zurückgeführt werden, dass die gewählten Anfangswerte nicht optimal sind. Es
bedarf erst einer Umschichtung des Kapitals. Die Eigenkapitaländerung u4 nimmt,
bis zum Aktivwerden der Verschuldungsbeschränkung, ihren Minimalwert an. Dies
entspricht gerade den Investitionen in die alternativen Anlagen x5 , die in dieser
Zeit sehr rasch anwachsen. Danach steigt die ersten ca. 2.85 Jahre der Eigenkapitalbestand des Unternehmens. Auch der Fremdkapitalbestand x3 wird in dieser Zeitspanne, nach einer kurzen Abbauphase (u∗3 = u3min < 0) bis t1 = 0.166, permanent
82
7 Ein komplexes Unternehmensmodell
0.2
0.05
"rhokv.dat"
"rhormv.dat"
0.18
0.04
0.16
0.03
0.14
0.02
0.12
0.01
0.1
0
0.08
0.06
-0.01
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.28: Zinsfunktionen (links); Inflationsrate (rechts)
erhöht. Die Steuerung u∗3 nimmt nur positive Werte an. Außerdem wird auf [0, t4 ] die
maximal mögliche Beschäftigungsänderung (u2 = u2max ) ausgeschöpft, die Anzahl
der Beschäftigten x2 steigt linear an. Schließlich werden auf [t4 , t5 ] alle Unternehmensbestände (x2 , x3 , x4 ) abgebaut. Ab dem Zeitpunkt t5 = 6.1988 wachsen sowohl
die Beschäftigung als auch die Kapitalbestände erneut monoton an. Dieses Verhalten der drei Steuerungen u2 , u3 , u4 sowie der Trajektorien x2 , x3 , x4 kann eindeutig
auf den Verlauf der Zinssätze ρm + ρr , ρk und der Preisfunktion p2 (t) zurückgeführt
werden. Denn ab dem zweiten bis zum sechsten Jahr fällt der Produktpreis monoton.
Zudem ist in dieser Zeitperiode die erwartete Rendite der Eigenkapitalgeber am niedrigsten. Demnach hängt die Aufschwungs/Abschwungsphase des Unternehmens sehr
eng mit der Entwicklung der Zinssätze zusammen. In der Hochzinsperiode wächst
der Betrieb, es wird vermehrt neues Personal eingestellt. Außerdem wird der Kapitalstock ständig erhöht. Teilweise werden sogar die Bestände an sicheren Anlagen x5
(u∗4 > 0) abgebaut. Demnach wird in diesem Zeitraum in wachsendem Maße produziert, denn die Werte der beiden Produktionsfaktoren (Beschäftigung und Kapital)
und damit auch die Ausbringungsmenge steigen. In der Niedrigzinsphase schrumpft
das Unternehmen, die Anzahl der Beschäftigten sowie der Kapitalbestand sinken.
Es wird zunehmend in alternative Anlagen investiert.
Der oben beschriebene Sachverhalt hat keinen Einfluss auf den Verlauf des Lagerbestandes x1 und der Diskontierungsfunktion x7 . Denn die Differentialgleichungen
der beiden Zustandsvariablen sind von den anderen entkoppelt. Die Diskontierungsfunktion x7 nimmt, mit Ausnahme des Zeitintervalls mit negativer Inflationsrate,
ständig ab. Das hängt damit zusammen, dass die zukünftigen Zahlungen niedriger
als die gegenwärtigen bewertet werden.
Der berechnete optimale Lösungsverlauf des Lagerbestandes x1 zeigt, dass zur Ma83
7 Ein komplexes Unternehmensmodell
ximierung des Gewinns der Unternehmenseigner der anfängliche Bestand von 100
Produktionseinheiten so schnell wie möglich auf den minimalen Wert von 50 PE
reduziert werden muss. Die Lageränderung u∗1 nimmt, bis der minimale Bestand erreicht ist, ihren kleinstmöglichen Wert u1min an. Dies bedeutet aber, dass in der Zeit
der maximal mögliche Abbau des Lagers stattfindet. Danach liegt u∗1 konstant bei 0,
d. h., der Lagerbestand bleibt in dem übrigen Zeitraum, von ungefähr 9.5 Jahren,
auf dem Minimalbestand von 50 PE, der zur Vermeidung des eventuellen Engpasses bei der Nachfrage vorgegebenen wurde. Diese Taktik ist aus ökonomischer Sicht
sehr sinnvoll, denn erstens verursacht die Einlagerung der Ware Kosten und diese
mindern natürlich den Gewinn. Außerdem binden alle deponierten Produktionsgüter
das schon investierte Kapital. Aus diesen Gründen ist ein wirtschaftlich handelnder
Unternehmer stets bestrebt, die Lagerbestände so gering wie möglich zu halten.
Die Änderung der Risikoversicherung x6 hängt nur von der Entwicklung des Eigenkapitals x4 ab, dementsprechend ist diese auf der ganzen Planungsperiode monoton
wachsend.
Der reine Gewinn der Unternehmenseigner am Ende der Planungsperiode tf = 10
beträgt bei Anwendung der eben geschilderten Strategie |591.247| GE.
Die durchgeführte Analyse zeigt, dass das komplexe Unternehmensmodell tatsächlich
sehr realitätsnah ist. Alle erhaltenen Ergebnisse sind wirtschaftlich gesehen gut nachvollziehbar und äußerst rational.
7.4.2 Optimale Steuerung des komplexen Unternehmensmodells
bei konstantem Preis
Nachdem nun die Lösung des komplexen Unternehmensmodells im Falle eines variierenden Produktpreises vorgestellt wurde, wird hier das optimale Verhalten der Unternehmenseigner bei konstantem Preis p1 = 0.05 aufgezeigt. Dabei werden die notwendigen Optimalitätsbedingungen nur beiläufig diskutiert. Der besondere Schwerpunkt dieses Abschnittes wird auf den Vergleich der beiden Lösungen gelegt.
In der Tabelle (7.4) ist die optimale Schaltstruktur der Steuerungen zusammengefasst. Die Abbildungen (7.29) - (7.35) zeigen die Grafen der optimalen Trajektorien.
Die zugehörigen adjungierten Variablen sind in den Abbildungen (7.38) - (7.41),
(7.44) zu finden. Die Verläufe der optimalen Steuerungen u∗1 , u∗2 , u∗3 , u∗4 sind in den
Abbildungen (7.42), (7.45), (7.43), (7.46) veranschaulicht. Schließlich sind in den
Abbildungen (7.47) - (7.52) die Schaltfunktionen der vier Steuerungen sowie die
beiden Multiplikatorfunktionen dargestellt.
84
7 Ein komplexes Unternehmensmodell
100
70
Lagerbestand
Beschaeftigung
95
65
90
60
85
55
80
75
50
70
45
65
40
60
35
55
50
30
0
2
4
6
8
10
0
2
4
6
8
10
Abbildung 7.29: x1 bei konstantem Preis Abbildung 7.32: x2 bei konstantem Preis
130
160
Fremdkapital
Eigenkapital
120
150
110
140
100
130
90
120
80
110
70
100
60
90
50
80
40
70
30
60
0
2
4
6
8
10
0
2
4
6
8
10
Abbildung 7.30: x3 bei konstantem Preis Abbildung 7.33: x4 bei konstantem Preis
450
35
sichere Anlagen
Risikoabsicherung
400
30
350
25
300
20
250
15
200
10
150
5
100
0
0
2
4
6
8
10
0
2
4
6
8
10
Abbildung 7.31: x5 bei konstantem Preis Abbildung 7.34: x6 bei konstantem Preis
85
7 Ein komplexes Unternehmensmodell
1
-0.031
Diskontierung
0.98
-0.032
0.96
0.94
-0.033
0.92
0.9
-0.034
0.88
-0.035
0.86
0.84
-0.036
0.82
0.8
-0.037
0
2
4
6
8
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.35: x7 bei konstantem Preis Abbildung 7.38: λ1 bei konstantem Preis
0.05
0.007
0
0.006
-0.05
0.005
-0.1
0.004
-0.15
0.003
-0.2
0.002
-0.25
0.001
-0.3
0
-0.35
-0.4
-0.001
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.36: λ2 bei konstantem Preis Abbildung 7.39: λ3 bei konstantem Preis
-1
-1
-1.05
-1.05
-1.1
-1.1
-1.15
-1.15
-1.2
-1.2
-1.25
-1.25
-1.3
-1.3
-1.35
-1.35
-1.4
-1.4
-1.45
-1.45
-1.5
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.37: λ4 bei konstantem Preis Abbildung 7.40: λ5 bei konstantem Preis
86
7 Ein komplexes Unternehmensmodell
1
800
700
0.5
600
500
0
400
300
-0.5
200
100
-1
0
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.41: λ6 bei konstantem Preis Abbildung 7.44: λ7 bei konstantem Preis
10
Lagerveraenderung
100
Besch.veraenderung
8
75
6
50
4
25
2
0
0
-25
-2
-4
-50
-6
-75
-8
-100
-10
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.42: u1 bei konstantem Preis Abbildung 7.45: u2 bei konstantem Preis
100
20
FK-Veraenderug
Investition
80
0
60
40
-20
20
0
-40
-20
-60
-40
-60
-80
-80
-100
-100
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.43: u3 bei konstantem Preis Abbildung 7.46: u4 bei konstantem Preis
87
7 Ein komplexes Unternehmensmodell
0.0035
0.05
0.003
0
-0.05
0.0025
-0.1
0.002
-0.15
0.0015
-0.2
0.001
-0.25
0.0005
-0.3
0
-0.35
-0.0005
-0.4
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.47: Σ1 bei konstantem Preis Abbildung 7.50: Σ2 bei konstantem Preis
0.007
0.02
0.018
0.006
0.016
0.005
0.014
0.012
0.004
0.01
0.003
0.008
0.002
0.006
0.004
0.001
0.002
0
0
-0.001
-0.002
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
5
6
7
8
9
10
Abbildung 7.48: Σ3 bei konstantem Preis Abbildung 7.51: Σ4 bei konstantem Preis
0.012
0.018
0.016
0.01
0.014
0.008
0.012
0.01
0.006
0.008
0.004
0.006
0.004
0.002
0.002
0
0
0
1
2
3
4
5
6
7
8
9
0
10
1
2
3
4
5
6
7
8
9
10
Abbildung 7.49: µ1 bei konstantem Preis Abbildung 7.52: µ2 bei konstantem Preis
88
7 Ein komplexes Unternehmensmodell
t
u∗1
[0.00,0.20140] u1min
[0.2014,0.4273 ] u1min
[0.4273,0.4998 ] u1min
[0.4981,3.8550 ]
0
[3.8550,6.4872 ]
0
[6.4872,10.00]
0
u∗2
u∗3
u∗4
u2max
u2max
u2max
u2max
u2min
singulär
u3min
u3max
singulär
singulär
singulär
singulär
u4min
u4min
singulär
singulär
singulär
singulär
x1 − 50 ≤ 0 x3 − κx4 ≤ 0
n.a.
n.a.
n.a.
a.
a.
a.
n.a
n.a.
a.
a.
a.
a.
Tabelle 7.4: Schaltstruktur der optimalen Steuerungen bei konstantem Preis
Der optimale Verlauf der Steuerung u∗1 wird, wie es im letzten Abschnitt erläutert
wurde, durch die Lagerbeschränkung festgelegt und ist von der Wahl der Parameter
unabhängig. Es gilt hier wiederum:
(
u1min ,
∀ t ∈ [0, t3 ]
u∗1 (t) =
0,
∀ t ∈ [t3 , tf ].
Σ1 (t) =
(
> 0,
= 0,
∀ t ∈ [0, t3 ]
∀ t ∈ [t3 , tf ].
(
= 0,
> 0,
∀ t ∈ [0, t3 ]
∀ t ∈ [t3 , tf ].
Für den Multiplikator µ2 gilt:
µ2 (t) =
Der Eintrittspunkt der Lagerbeschränkung (t3 = 0.4998) stimmt ebenfalls überein.
Denn das Lager wird mit maximaler Geschwindigkeit, bis der Minimalbestand erreicht ist, abgebaut und in beiden Fällen wird von den gleichen Anfangswerten ausgegangen.
Die Struktur der beiden letzten Steuerungen, mittels denen der Geldfluss des Unternehmens geregelt wird, bleibt unverändert. Am Anfang nehmen u∗3 , u∗4 nur ihre
Grenzwerte an und mit dem Aktivwerden der Verschuldungsbeschränkung weisen
beide wieder singulären Verlauf auf. Die Schaltfunktionen haben folgende Form:
(
∀ t ∈ [0, t1 )
> 0,
> 0,
∀ t ∈ [0, t1 )
Σ3 (t) =
< 0,
∀ t ∈ (t1 , t2 ) und Σ4 (t) =
= 0,
∀ t ∈ [t2 , tf ].
= 0,
∀ t ∈ [t2 , tf ]
Aber die Schaltpunkte t1 , t2 (bzw. Eintrittspunkt t2 ) liegen diesmal etwas weiter
hinten.
Da die erwartete Rendite auch hier stets über dem Fremdkapitalzinssatz liegt, wird
89
7 Ein komplexes Unternehmensmodell
im Falle eines konstanten Preises die Verschuldungsbeschränkung früh aktiv (in
t2 = 0.4273) und bleibt es bis zum Ende der Planungsperiode. Die zugehörige Multiplikatorfunktion erfüllt die Vorzeichen- und Komplementaritätsbedingung:
(
= 0,
∀ t ∈ [0, t2 ]
µ1 (t) =
> 0,
∀ t ∈ [t2 , tf ].
Im Gegensatz zu den übrigen Steuerungen tritt bei der Beschäftigungsänderung u∗2
eine wesentliche Änderung auf. Diese hat nicht mehr reine bang-bang Struktur, sondern enthält im Zeitintervall [t5 , tf ] (mit t5 = 6.4872) auch ein singuläres Teilstück.
Die Schaltfunktion Σ2 (t) hat folgende Gestalt:
∀t ∈ [0, t4 )
< 0,
Σ2 (t) =
> 0,
∀t ∈ (t4 , t5 )
= 0,
∀t ∈ [t5 , tf ],
mit Σ2 (t4 ) = 0. Darüber hinaus wird mit t4 = 3.8550 ca. ein Jahr später auf maximalen Beschäftigungsabbau (u∗2 = u2min ) umgeschaltet, als im Falle der variierenden
Preisfunktion. Dort liegt der Schaltpunkt t4 bei 2.8522. Vor allem aber wird in der
Zeitspanne [t5 , tf ] nicht sofort mit dem maximalen Beschäftigungsaufbau angefangen, die Beschäftigtenanzahl wird fast bis zum achten Jahr weiter reduziert (u∗2 < 0).
Alle Konsequenzen der eingetretenen Veränderungen sowie die möglichen Gründe
hierfür werden noch zum späteren Zeitpunkt detaillierter diskutiert. Erst sollen die
theoretischen Ausführungen beendet werden.
Die Transversalitätsbedingung (7.6) wird auch von der Lösung des komplexen Modells bei konstantem Preis mit γ1 = γ2 = 0 eingehalten. Die Endwerte der adjungierten Variablen lauten hier:
λ1 (tf ) = −0.03125,
λ2 (tf ) = 0,
λ3 (tf ) = 0,
λ4 (tf ) = −1,
λ5 (tf ) = −1,
λ6 (tf ) = 0,
λ7 (tf ) = 1.949.
Zudem zeigen die obigen Ausführungen, dass sowohl die Minimumbedingung als auch
die Vorzeichen- und Komplementaritätsbedingung überall erfüllt werden. Demnach
genügt die vorliegende Lösung den notwendigen Optimalitätsbedingungen.
Die beiden Multiplikatorfunktionen können erneut durch Differentation der entsprechenden Schaltfunktionen gewonnen werden. Beim direkten Vergleich der Funktionen µ1 (t) beider Lösungen (siehe Abbildungen 7.49,7.23) fällt auf, dass deren
Verläufe identisch sind. Dies wird auch durch den theoretisch ausgerechneten Term
bestätigt, denn dieser hängt nicht vom Preis ab.
µ1 (t) =
(1 − τ )
[0.05λ4 + λ6 ρr (t) − λ5 ρm (t)] .
(1 + κ)
90
7 Ein komplexes Unternehmensmodell
Die Funktion µ2 (t) enthält dagegen den Preis p1 (bzw. p2 (t)) als eine Variable. Diese
lautet hier (da ṗ1 = 0):
µ2 (t) =
(1 − τ ) λ4 [σ − p1 ln(1 + i(t))] − λ̇4 p1 .
x7
Auch die Berechnung der singulären Steuerungen erfolgt analog zu den durchgeführten Rechnungen bei variierendem Preis. Diesmal muss jedoch zusätzlich der Verlauf
von u∗2 auf dem letzten Zeitintervall bestimmt werden. Dazu wird die Funktion Σ2 (t)
nach der Zeit t abgeleitet bis die gesuchte Steuerung darin auftaucht. Es gilt hier:
∂
∂
λ̇2 = 0
Σ̇2 (t) =
∂u
∂u
∂
∂
λ̈2 6= 0.
Σ̈2 (t) =
∂u
∂u
Demnach muss auf dem Zeitintervall [t5 , tf ] zur Bestimmung der singulären Steuerungen u∗2 , u∗4 ein (2 × 2) - Gleichungssystem gelöst werden. Auf die Angabe der
ausgerechneten Lösung wird an dieser Stelle jedoch verzichtet. Es wird nur darauf
hingewiesen, dass u∗2 , u∗4 sowohl von dem Verlauf der Zustände xi abhängen als auch
von den adjungierten Variablen λi .
Vergleich der Lösungen für verschiedene Preisfunktionen
In den obigen Ausführungen wurde schon deutlich, dass der wohl markanteste Unterschied der beiden optimalen Strategien in dem Beschäftigungsbereich des Untenehmens liegt. Doch auch in dem Kapitalsektor können erhebliche Abweichungen
festgestellt werden. Die anfängliche Wachstumsphase der beiden Ressorts (x2 , x3 , x4 )
endet im Falle eines variierenden Preises schon nach ca. 2.85 Jahren, bei konstantem
Preis dagegen erst ein Jahr später. Dafür ist aber die anschließende Abschwungsphase im ersten Beispiel etwa um sieben Monate kürzer als im zweiten. Außerdem fällt
bei konstantem Preis der erneute Zuwachs an Kapitalbeständen und Arbeitskräften
am Ende der Planungsperiode geringer aus.
Dieses Verhalten ist erstaunlich, wenn man den Verlauf der Preisfunktion p2 (t)
(Abbildung 7.27) berücksichtigt. Denn die ersten vier Jahre liegt der variierende
Produktpreis über dem konstanten und vom vierten bis zum achten Jahr unter
p1 = 0.05. Somit hätte man erwarten können, dass bei schwankendem Preis die
erste Aufschwungsphase länger andauert und die zweite erst später eintritt. Doch
offensichtlich spielt nicht nur der Preis selbst, sondern auch die zukünftige Tendenz
(p2 (t) ist auf [2, 6] monoton fallend und auf [6, 10] monoton steigend) eine Rolle.
Die Werte der Ableitung ṗ2 (t) sind auch in den berechneten Steuerungen (sieh 7.8)
enthalten und wirken sich somit tatsächlich auf den optimalen Lösungsverlauf aus.
91
7 Ein komplexes Unternehmensmodell
Da aber bei beiden Lösungen verschiedene Wachstumsphasen zu beobachten sind,
wird deutlich, dass diese nicht auf den schwankenden Preis zurückgeführt werden
können, sondern eindringlich mit der Entwicklung der Zinssatze zusammenhängen.
Des Weiteren ist anzumerken, dass auch die beiden Vermögensgrößen x5 , x6 geringfügig abweichende Verläufe annehmen. So hat die Risikoversicherung x6 bei konstantem Produktpreis fast überall die gleiche Steigung. Im Falle einer variierenden
Preisfunktion dagegen schwankt die Höhe des Anstiegs, in Abhängigkeit von der
jeweiligen Wachstumsphase.
Während die alternativen Anlagen x5 bei schwankendem Preis in beiden Wachstumsperioden zugunsten des Unternehmens abgebaut werden, sind sie bei der Wahl
eines konstanten Preises fast überall streng monoton wachsend. Nur zwischen dem
zweiten und dem dritten Jahr bleibt das Guthaben unverändert. Zwar nimmt die
Steuerung u∗4 auf den Zeitintervallen [0.5, 3] und [9, 10] positive Werte an, was einem
Abzug der sicheren Anlagen gleicht, aber offensichtlich wird diese Differenz durch
anfallende Zinserträge gedeckt.
Der Verlauf des Lagerbestandes x1 sowie die Diskontierungsfunktion x7 stimmen
in beiden Lösungen vollkommen überein. Dies ist auch nicht weiter verwunderlich,
denn beide sind von der Preisentwicklung unabhängig. Zudem sind die Differentialgleichungen dieser Zustandsvariablen von den anderen entkoppelt.
Ein direkter Vergleich der Lösungen zeigt also, dass in beiden Fällen das zu steuernde Unternehmen in 10 Jahren drei Phasen durchläuft: Aufschwung - Abschwung
- Aufschwung. Bei der Wahl eines konstanten Preises ist die letzte Phase sehr kurz
und eher gering. Dies macht sich auch in dem betragsmäßigen Zielfunktionswert bemerkbar. Denn dieser liegt mit |522.566| GE etwa 13% unter dem erwirtschafteten
Gewinn bei varriierendem Preis, der |591.247| GE beträgt. Demnach ist es ökonomisch unvorteilhaft den Produktpreis auf dem ganzen Planungszeitraum, insbesondere bei gleichzeitig steigenden Kosten, konstant zu setzen. Dies bestätigt erneut die
altbekannten Wirtschaftsprinzipien und somit die ausgesprochene Realitätsnähe des
komplexen Unternehmensmodells.
7.4.3 Optimale Steuerung des komplexen Unternehmensmodells
bei Verdoppelung der Planungsperiode
Jedes Unternehmen strebt generell eine dauerhafte Existenz an. Aus diesem Grunde
ist es von äußerster Wichtigkeit zu prüfen, ob eine kurzzeitig ausgelegte (optimale) Strategie nicht zu erheblichen Defiziten in der Zukunft führt. Daher wird hier
noch zum Schluss die Lösung des komplexen Modells bei einer Verlängerung der
Planungsperiode im Falle eines variierenden Preises demonstriert.
92
7 Ein komplexes Unternehmensmodell
100
65
Lagerbestand
Beschaeftigung
60
90
55
50
80
45
70
40
35
60
30
25
50
20
40
15
0
5
10
15
20
0
5
10
15
20
Abbildung 7.53: x1 bei Verdoppelung der Abbildung 7.56: x2 bei Verdoppelung der
Planungsperiode
Planungsperiode
220
300
Fremdkapital
Eigenkapital
200
250
180
160
200
140
120
150
100
100
80
60
50
40
20
0
0
5
10
15
20
0
5
10
15
20
Abbildung 7.54: x3 bei Verdoppelung der Abbildung 7.57: x4 bei Verdoppelung der
Planungsperiode
Planungsperiode
1000
80
sichere Anlagen
Risikoabsicherung
900
70
800
60
700
50
600
40
500
30
400
20
300
10
200
100
0
0
5
10
15
20
0
5
10
15
20
Abbildung 7.55: x5 bei Verdoppelung der Abbildung 7.58: x6 bei Verdoppelung der
Planungsperiode
Planungsperiode
93
7 Ein komplexes Unternehmensmodell
1
-0.03
Diskontierung
0.95
-0.035
0.9
-0.04
0.85
-0.045
0.8
-0.05
0.75
-0.055
0.7
-0.06
0.65
-0.065
0
5
10
15
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.59: x7 bei Verdoppelung der Abbildung 7.62: λ1 bei Verdoppelung der
Planungsperiode
Planungsperiode
1
0.009
0.008
0.5
0.007
0
0.006
0.005
-0.5
0.004
-1
0.003
0.002
-1.5
0.001
-2
0
-2.5
-0.001
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.60: λ2 bei Verdoppelung der Abbildung 7.63: λ3 bei Verdoppelung der
Planungsperiode
Planungsperiode
-1
-1
-1.2
-1.2
-1.4
-1.4
-1.6
-1.6
-1.8
-1.8
-2
-2
-2.2
-2.2
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.61: λ4 bei Verdoppelung der Abbildung 7.64: λ5 bei Verdoppelung der
Planungsperiode
Planungsperiode
94
7 Ein komplexes Unternehmensmodell
1
2500
2000
0.5
1500
0
1000
-0.5
500
-1
0
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.65: λ6 bei Verdoppelung der Abbildung 7.68: λ7 bei Verdoppelung der
Planungsperiode
Planungsperiode
10
10
0
8
-10
6
-20
4
-30
2
-40
0
-50
-2
-60
-4
-70
-6
-80
-8
-90
-100
-10
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.66: u1 bei Verdoppelung der Abbildung 7.69: u2 bei Verdoppelung der
Planungsperiode
Planungsperiode
100
40
80
20
60
0
40
20
-20
0
-40
-20
-40
-60
-60
-80
-80
-100
-100
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.67: u3 bei Verdoppelung der Abbildung 7.70: u4 bei Verdoppelung der
Planungsperiode
Planungsperiode
95
7 Ein komplexes Unternehmensmodell
0.0007
1
0.0006
0.5
0.0005
0
0.0004
-0.5
0.0003
-1
0.0002
-1.5
0.0001
-2
0
-2.5
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.71: Σ1 bei Verdoppelung Abbildung 7.74: Σ2 bei Verdoppelung
der Planungsperiode
der Planungsperiode
0.009
0.03
0.008
0.025
0.007
0.006
0.02
0.005
0.004
0.015
0.003
0.01
0.002
0.001
0.005
0
-0.001
0
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.72: Σ3 bei Verdoppelung Abbildung 7.75: Σ4 bei Verdoppelung
der Planungsperiode
der Planungsperiode
0.025
0.025
0.02
0.02
0.015
0.015
0.01
0.01
0.005
0.005
0
0
0
2
4
6
8
10
12
14
16
18
20
0
2
4
6
8
10
12
14
16
18
20
Abbildung 7.73: µ1 bei Verdoppelung der Abbildung 7.76: µ2 bei Verdoppelung der
Planungsperiode
Planungsperiode
96
7 Ein komplexes Unternehmensmodell
t
u∗1
[0.0000,0.16603] u1min
[0.1660,0.3947 ] u1min
[0.3947,0.4998 ] u1min
[0.4981,2.8529 ]
0
[2.8529,6.1988 ]
0
[6.1988,10.00 ]
0
[10.000,14.321 ]
0
[14.321,18.790 ]
0
[18.790,18.873 ]
0
[18.873,19.522 ]
0
[19.522,20.00 ]
0
u∗2
u∗3
u∗4
u2max
u2max
u2max
u2max
u2min
u2max
u2min
u2max
u2max
u2min
u2min
u3min
u3max
singulär
singulär
singulär
singulär
singulär
singulär
singulär
singulär
singulär
u4min
u4min
singulär
singulär
singulär
singulär
singulär
singulär
u4min
u4min
u4min
x1 − 50 ≤ 0 x3 − 0.8x4 ≤ 0
n.a.
n.a.
n.a.
a.
a.
a.
a.
a.
a.
a.
a.
n.a
n.a.
a.
a.
a.
a.
a.
a.
a.
a.
n.a.
Tabelle 7.5: Schaltstruktur der optimalen Steuerungen bei variierendem Preis
Diesmal wird auf die Überprüfung der notwendigen Optimalitätsbedingungen ganz
verzichtet. Es sei aber darauf hingewiesen, dass diese auch hier eingehalten werden.
Das primäre Ziel dieses Abschnittes besteht darin herauszufinden, welche Konsequenzen eine Verdoppelung der Planungsperiode nach sich zieht.
In den Abbildungen (7.53) - (7.70) sind die Grafen der optimalen Trajektorien,
der zugehörigen Adjungierten sowie der optimalen Steuerungen dargestellt. Die Abbildungen (7.71) - (7.76) zeigen den Verlauf der Schaltfunktionen und der beiden
Multiplikatorfunktionen. Die Schaltstruktur der optimalen Steuerungen ist in der
Tabelle (7.5) zusammengefasst.
Bei näherem Betrachten der optimalen Lösung in den Abbildungen (7.53) - (7.76)
stellt man erfreulicherweise fest, dass diese auf den ersten 10 Jahren mit den Grafen (7.3) - (7.26) übereinstimmen. Sogar die Schaltpunkte optimaler Steuerungen
für unterschiedlich lange Planungsperioden sind in den ersten zehn Jahren identisch
(siehe Tabellen 7.3, 7.5). Dies bedeutet gerade, dass die für kürzere Periode empfohlene Taktik auch auf lange Sicht erfolgsversprechend ist.
Somit hängt die optimale Strategie der Unternehmenseigner zur Maximierung der
Gewinne nicht von der Dauer des Planungszeitraumes ab.
Die Gründe dafür lassen sich in mehreren (realen) Voraussetzungen dieses Modells
finden. Zunächst ein Mal hängt der Verlauf der Diskontierungsfunktion nur von der
Inflationsrate i(t) ab und ist dadurch zu jedem Zeitpunkt festgelegt. Des Weiteren stellt der Lagerbestand x1 in der Gewinnfunktion G(t) einen Kostenfaktor dar,
deswegen wird dieser mittels der Steuerung u∗1 soweit wie möglich reduziert. Die
Entwicklung der übrigen drei Steuerungen wird von dem Verlauf der Zinsfunktionen
97
7 Ein komplexes Unternehmensmodell
ρm +ρr , ρk bestimmt. Durch Berücksichtigung der konjunkturellen Schwankungen in
den Zinsfunktionen wird die aktuelle Marktlage, an welcher sich die Entwicklung des
Unternehmens letztendlich richtet, bewertet. Dementsprechend wird zu jedem Zeitpunkt eine Entscheidung aufgrund der gegenwärtigen Wirtschaftsbedingungen und
des Markttrends getroffen. Der Letzte wird mittels der Ableitungen der Zinsfunktionen einbezogen, welche sich ebenfalls in den optimalen Steuerungen auswirken.
Dies wird insbesondere anhand der theoretischen Berechnungen ersichtlich.
Die ausschlaggebende Größe dieses Modells ist also die Zinsstruktur, anhand welcher
bestimmt wird, ob das Unternehmen wächst oder schrumpft.
Diese Feststellung wird auch durch den Verlauf der optimalen Trajektorien auf dem
Zeitintervall [10, 20] (bei einer Verdoppelung der Planungsperiode) untermauert.
Auch hier lösen sich die Aufschwungs- und Abschwungsphase nacheinander ab. Dabei kommt die Steuerung u∗4 immer näher an ihre Grenzen, sodass diese in t = 18.79
sogar ihren Minimalwert annimmt, d. h. es werden maximal mögliche Investitionen
in alternative Anlagen getätigt. Damit ist auch der Austrittspunkt (t = 19.522) der
Verschuldungsbeschränkung zu erklären. Da das Unternehmen sich gerade in einer
Abschwungsphase befindet, ist es vom Vorteil alle Betriebsbestände (Beschäftigung,
Kapital) zu reduzieren. In den früheren Abbauperioden wurde die maximale Verschuldungsbeschränkung trotzdem noch ausgeschöpft, denn es bestand die Möglichkeit das Geld für die sicheren Anlagen zu verwenden. Diesmal wird jedoch die Kapazität der Eigenkapitaländerung u∗4 vollkommen ausgenutzt. Demnach wird hier nicht
mehr das maximal zur Verfügung stehende Kapital benötigt.
Die oben genannten Sachverhalte spiegeln sich auch in dem Zielfunktionswert wider.
Dieser ist im Falle einer zwanzigjährigen Planung mit |1174.71| GE fast doppelt so
hoch wie bei einer zehnjährigen Planungsperiode.
98
8 Schlussbemerkung
In dieser Arbeit wurden zunächst, um eine tragende Basis für das Verständnis der
vorgeführten Beispiele zu schaffen, die theoretischen Hintergründe der optimalen
Steuerprozesse näher erläutert. Hierbei wurde insbesondere der interessante Fall,
in welchem durch das Pontrayginsche Minimumprinzip unter zusätzlichen Konvexitätsannahmen auch hinreichende Bedingungen gegeben werden, hervorgehoben.
Denn solche Probleme sind gerade in den wirtschaftlichen Anwendungen öfters vertreten. Anschließend wurden zwei ökonomische Beispiele aus dem Bereich des Unternehmenswachstum vorgestellt. Dabei war die Behandlung des ersten Beispiels,
modifizierten Modell von Lesourne und Leban, für die vorliegende Arbeit aus zwei
unterschiedlichen Gründen vom Interesse. Erstens bildet dieses den Ausgangspunkt
des komplexen Modells und zweitens gehört es zu der Klasse der Probleme, welche
die zusätzlichen Konvexitätsannahmen erfüllen.
Den Kern der vorliegenden Arbeit bildete die Bearbeitung eines komplexen Unternehmensmodells. Dabei handelt es sich um einen wirklich komplexen parameterreichen optimalen Steuerprozess mit vier linearen Steuerungen, sieben Zustandsvariablen und zwei aktiven Zustandsbeschränkungen. Solche Anwendungen sind in der
Literatur eher selten vertreten. Mit diesem Modell konnte ein sehr aufschlussreiches
Beispiel, welches in der Lage ist wirtschaftliche Vorgänge äußerst realitätsnahe zu
repräsentieren, demonstriert werden.
Im Rahmen dieser Arbeit wurde eingehend untersucht, welchen Einfluss eine Änderung der Parameter, mämlich Produktpreis sowie die Dauer der Planungsperiode,
auf den optimalen Lösungsverlauf hat. Doch auch eine Analyse der anderen Parameter wäre mit Sicherheit lehrreich. Z. B. wäre interessant zu sehen inwieweit die
optimale Lösung von der Wahl der Koeffizienten der Produktionsfunktion abhängt,
denn mit höherer Produktionselastizität (α1 , α2 ) steigt die Ausbringungsmenge. Dies
führt zu höheren Gewinnen und könnte eventuell einen raschen Abbau der Unternehmensbestände in den Niedrigzinsphasen verhindern.
Die fundierten Ergebnisse dieser Arbeit zeigen deutlich, dass es in der Behandlung
ökonomischer Modelle mittels optimaler Steuerprozesse sehr viel Potenzial steckt.
99
A Beispieldateien: AMPL-Code
A.1 Komplexes Modell beim variierenden Preis mit
Heun-Verfahren
####################################################################
#
Komplexes Modell für risikoscheue EK-Geber
#
#
HEUN-Verfahren
#
#
beim variierenden Preis
#
####################################################################
####################################################################
# DEKLARATION DER PARAMETER:
#
####################################################################
param t_0
:= 0.0;
param t_f
:= 10.0;
param n
:= 5000;
param h
:= (t_f-t_0)/n;
param u1_min := -100.0;
param u1_max := 100.0;
param u2_min := -10.0;
param u2_max := 10.0;
param u3_min := -100.0;
param u3_max := 100.0;
param u4_min := -100.0;
param u4_max := 100.0;
param tau
:= 0.5;
param alpha
:= 100.0;
param alpha1 := 0.35;
param alpha2 := 0.5;
param sigma
:= 0.01;
param delta
:= 0.322;
param kappa
:= 0.8;
100
A Beispieldateien: AMPL-Code
param kl
:= 8.0;
param pi
:= 3.1415927;
####################################################################
# DEKLARATION DER VARIABLEN:
#
####################################################################
var x_1 {i in 0..n}:=100;
var x_2 {i in 0..n}:=30;
var x_3 {i in 0..n}:=50;
var x_4 {i in 0..n}:=100;
var x_5 {i in 0..n}:=100;
var x_6 {i in 0..n}:=0.0;
var x_7 {i in 0..n}:=1.0;
var u_1 {i in 0..n-1};
var u_2 {i in 0..n-1};
var u_3 {i in 0..n-1};
var u_4 {i in 0..n-1};
param k
{i in 0..n} := (pi/2.0)+(2.0*pi/kl)*i*h;
param w
{i in 0..n} := 2*exp(0.02*i*h);
param zin {i in 0..n} := 0.019+0.029*sin(k[i]);
param rhok {i in 0..n} := 0.110+0.030*sin(k[i]);
param rhom {i in 0..n} := 0.074+0.018*sin(k[i]);
param rhor {i in 0..n-1} := rhok[i]-0.05;
param p
{i in 0..n} := 0.05+0.01*sin(k[i]-(pi/2.0));
var dgl_1 {i in 0..n-1} = u_1[i];
var dgl_2 {i in 0..n-1} = u_2[i];
var dgl_3 {i in 0..n-1} = u_3[i];
var dgl_4 {i in 0..n-1} = u_4[i]+(1-tau)*((1.0/x_7[i])*(p[i]*
(alpha*(x_3[i]+x_4[i])^alpha1*x_2[i]^alpha2-u_1[i])-sigma*x_1[i]w[i]*x_2[i])-rhok[i]*x_3[i]-delta*(x_3[i]+x_4[i])-rhor[i]*x_4[i]);
var dgl_5 {i in 0..n-1} = -1.0*u_4[i]+(1-tau)*rhom[i]*x_5[i];
var dgl_6 {i in 0..n-1} = (1-tau)*rhor[i]*x_4[i];
var dgl_7 {i in 0..n-1} = log(1+zin[i])*(-x_7[i]);
var euler_1 {i in 0..n-1} = x_1[i] + h * (u_1[i]);
var euler_2 {i in 0..n-1} = x_2[i] + h * (u_2[i]);
var euler_3 {i in 0..n-1} = x_3[i] + h * (u_3[i]);
var euler_4 {i in 0..n-1} = x_4[i] + h * (u_4[i]+(1-tau)*((1.0/x_7[i])
*(p[i]*(alpha*(x_3[i]+x_4[i])^alpha1*x_2[i]^alpha2-u_1[i])-sigma*x_1[i]
-w[i]*x_2[i])-rhok[i]*x_3[i]-delta*(x_3[i]+x_4[i])-rhor[i]*x_4[i]));
101
A Beispieldateien: AMPL-Code
var euler_5 {i in 0..n-1}=x_5[i]+h*(-1.0*u_4[i]+(1-tau)*rhom[i]*x_5[i]);
var euler_6 {i in 0..n-1}=x_6[i]+h*((1-tau)*rhor[i]*x_4[i]);
var euler_7 {i in 0..n-1}=x_7[i]+h*(log(1+zin[i])*(-x_7[i]));
####################################################################
# ANGABE DES ZIELFUNKIONALS:
#
####################################################################
minimize Zielfkt: -(x_4[n]+x_5[n]+(1-tau)*p[n]*(x_1[n]/x_7[n]));
####################################################################
# ANGABE DER ANFANGSWERTE:
#
####################################################################
s.t. aw_1 : x_1[0] = 100.0;
s.t. aw_2 : x_2[0] = 30.0;
s.t. aw_3 : x_3[0] = 50.0;
s.t. aw_4 : x_4[0] = 100.0;
s.t. aw_5 : x_5[0] = 100.0;
s.t. aw_6 : x_6[0] = 0.0;
s.t. aw_7 : x_7[0] = 1.0;
####################################################################
# DIE DYNAMIK DES SYSTEMS:
#
####################################################################
s.t.heun_1 {i in 0..n-1}: x_1[i+1]=x_1[i]+0.5*h*(dgl_1[i]+u_1[i]);
s.t.heun_2 {i in 0..n-1}: x_2[i+1]=x_2[i]+0.5*h*(dgl_2[i]+u_2[i]);
s.t.heun_3 {i in 0..n-1}: x_3[i+1]=x_3[i]+0.5*h*(dgl_3[i]+u_3[i]);
s.t.heun_4 {i in 0..n-1}: x_4[i+1]=x_4[i]+0.5*h*(dgl_4[i]+(u_4[i]+
(1-tau)*((1.0/euler_7[i])*(p[i]*(alpha*(euler_3[i]+euler_4[i])^alpha1*
euler_2[i]^alpha2-u_1[i])-sigma*euler_1[i]-w[i]*euler_2[i])rhok[i]*euler_3[i]-delta*(euler_3[i]+euler_4[i])rhor[i]*euler_4[i])));
s.t. heun_5 {i in 0..n-1}: x_5[i+1] = x_5[i] + 0.5*h * (dgl_5[i]+
(-1.0*u_4[i]+(1-tau)*rhom[i]*euler_5[i]));
s.t. heun_6 {i in 0..n-1}: x_6[i+1] = x_6[i] + 0.5*h * (dgl_6[i]+
((1-tau)*rhor[i]*euler_4[i]));
s.t. heun_7 {i in 0..n-1}: x_7[i+1] = x_7[i] + 0.5*h * (dgl_7[i]+
log(1+zin[i])*(-euler_7[i]));
####################################################################
102
A Beispieldateien: AMPL-Code
# ANGABE DER ZUSTANDS- UND STEUERBESCHRAENKUNGEN
#
####################################################################
s.t. beschr_1 {i in 0..n-1} : u1_min <= u_1[i] <= u1_max;
s.t. beschr_2 {i in 0..n-1} : u2_min <= u_2[i] <= u2_max;
s.t. beschr_3 {i in 0..n-1} : u3_min <= u_3[i] <= u3_max;
s.t. beschr_4 {i in 0..n-1} : u4_min <= u_4[i] <= u4_max;
s.t. beschr_5a {i in 0..n-1} : 50.0 - x_1[i] <= 0.0;
s.t. beschr_5b {i in 0..n-1} : x_1[i]<=200;
s.t. beschr_6 {i in 0..n-1} : 0.0 <= x_2[i];
s.t. beschr_7 {i in 0..n-1} : 0.0 <= x_3[i];
s.t. beschr_8 {i in 0..n-1} : 0.0 <= kappa*x_4[i]-x_3[i];
s.t. beschr_9 {i in 0..n-1} : 0.0 <= x_5[i];
####################################################################
# ANGABE DER ANFANGSSCHAETZUNGEN
#
####################################################################
let {i in 0..n-1} u_1[i] := u1_min;
let {i in 0..n-1} u_2[i] := u2_max;
let {i in 0..n-1} u_3[i] := u3_min;
let {i in 0..n-1} u_4[i] := u4_min;
####################################################################
# AUSWAHL DES SOLVERS
#
####################################################################
# option solver loqo;
option solver ipopt;
# option abs_boundtol 1;
#option rel-boundtol 1e-4;
####################################################################
# ANGABE DER OPTIONALEN LOQO-OPTIONS
#
####################################################################
option loqo_options "verbose=2 timing=1 maxit=2000";
option rel_boundtol 1;
option abs_boundtol 1;
####################################################################
# BEFEHL ZUM LOESEN DES PROBLEMS
#
####################################################################
solve;
####################################################################
# AUSGABE IN DIE JEWEILIGEN DATEIEN
#
103
A Beispieldateien: AMPL-Code
####################################################################
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_1[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx1h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_2[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx2h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_3[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx3h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_4[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx4h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_5[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx5h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_6[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx6h.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_7[i]
> ’/u/balzern/LOQO/
Risikoscheu/vx7h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_1[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda1h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_2[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda2h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_3[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda3h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_4[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda4h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_5[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda5h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_6[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda6h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_7[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda7h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_4[i]-heun_5[i] > ’
/u/balzern/LOQO/Risikoscheu/vsigma4h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, heun_1[i]-(heun_4[i]*tau*
p[i])/x_7[i] > ’/u/balzern/LOQO/Risikoscheu/vsigma1h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_1[i] > ’/u/balzern/LOQO/
Risikoscheu/vu1h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_2[i] > ’/u/balzern/LOQO/
Risikoscheu/vu2h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_3[i] > ’/u/balzern/LOQO/
104
A Beispieldateien: AMPL-Code
Risikoscheu/vu3h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_4[i] > ’/u/balzern/LOQO/
Risikoscheu/vu4h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, -(1.0/h)*beschr_5a[i]
>
’/u/balzern/LOQO/Risikoscheu/vmju1h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_5b[i]
>
’/u/balzern/LOQO/Risikoscheu/vmju1bh.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_6[i]
>
’/u/balzern/LOQO/Risikoscheu/vmju2ah.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_7[i]
>
’/u/balzern/LOQO/Risikoscheu/vmju3h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, -(1.0/h)*beschr_8[i]
>
’/u/balzern/LOQO/Risikoscheu/vmju2h.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, ((1-tau)/(1+kappa))*
(0.05*heun_4[i]+heun_6[i]*rhor[i]-heun_5[i]*rhom[i])
>
’/u/balzern/LOQO/Risikoscheu/vmju1theoh.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h,0.8*(u_4[i]+(1-tau)*
((1.0/x_7[i])*(p[i]*(alpha*(x_3[i]+x_4[i])^alpha1*x_2[i]^alpha2u_1[i])-sigma*x_1[i]-w[i]*x_2[i])-rhok[i]*x_3[i]-delta*(x_3[i]+x_4[i])
-rhor[i]*x_4[i]))
> ’/u/balzern/LOQO/Risikoscheu/vu3theoh.dat’;
105
A Beispieldateien: AMPL-Code
A.2 Komplexes Modell beim variierenden Preis mit
Euler-Verfahren
####################################################################
#
Konzernmodell für risikoscheuen EK-Geber
#
#
beim variierenden Preis
#
#
Euler-Verfahren
#
####################################################################
####################################################################
# DEKLARATION DER PARAMETER:
#
####################################################################
param t_0
:= 0.0;
param t_f
:= 10.0;
param n
:= 1000;
param h
:= (t_f-t_0)/n;
param u1_min := -100.0;
param u1_max := 100.0;
param u2_min := -10.0;
param u2_max := 10.0;
param u3_min := -100.0;
param u3_max := 100.0;
param u4_min := -100.0;
param u4_max := 100.0;
param tau
:= 0.5;
param alpha
:= 100.0;
param alpha1 := 0.35;
param alpha2 := 0.5;
param sigma
:= 0.01;
param delta
:= 0.322;
param kappa
:= 0.8;
param pi
:= 3.1415927;
param kl
:= 8.0;
####################################################################
# DEKLARATION DER VARIABLEN:
#
####################################################################
var x_1 {i in 0..n}:=100;
var x_2 {i in 0..n}:=30;
106
A Beispieldateien: AMPL-Code
var x_3 {i in 0..n}:=50;
var x_4 {i in 0..n}:=100;
var x_5 {i in 0..n}:=100;
var x_6 {i in 0..n}:=0.0;
var x_7 {i in 0..n}:=1.0;
var u_1 {i in 0..n-1};
var u_2 {i in 0..n-1};
var u_3 {i in 0..n-1};
var u_4 {i in 0..n-1};
param k
{i in 0..n} := pi/2.0+(2.0*pi/kl)*i*h;
param w
{i in 0..n} := 2*exp(0.02*i*h);
param zin {i in 0..n} := 0.019+0.029*sin(k[i]);
param rhok {i in 0..n} := 0.110+0.030*sin(k[i]);
param rhom {i in 0..n} := 0.074+0.018*sin(k[i]);
param p
{i in 0..n} := 0.05+0.01*sin(k[i]-(pi/2.0));
param rhor {i in 0..n-1} := rhok[i]-0.05;
var x_22 {i in 0..n}:=(1-tau)*(dgl_4[i]);
####################################################################
# ANGABE DES ZIELFUNKIONALS:
#
####################################################################
minimize Zielfkt: -(x_4[n]+x_5[n]+(1-tau)*p[n]*(x_1[n]/x_7[n]));
####################################################################
# ANGABE DER ANFANGSWERTE:
#
####################################################################
s.t. aw_1 : x_1[0] = 100.0;
s.t. aw_2 : x_2[0] = 30.0;
s.t. aw_3 : x_3[0] = 50.0;
s.t. aw_4 : x_4[0] = 100.0;
s.t. aw_5 : x_5[0] = 100.0;
s.t. aw_6 : x_6[0] = 0.0;
s.t. aw_7 : x_7[0] = 1.0;
####################################################################
# DIE DYNAMIK DES SYSTEMS:
#
####################################################################
s.t. dgl_1 {i in 0..n-1}: x_1[i+1] = x_1[i] + h * (u_1[i]);
s.t. dgl_2 {i in 0..n-1}: x_2[i+1] = x_2[i] + h * (u_2[i]);
107
A Beispieldateien: AMPL-Code
s.t. dgl_3 {i in 0..n-1}: x_3[i+1] = x_3[i] + h * (u_3[i]);
s.t. dgl_4 {i in 0..n-1}: x_4[i+1] = x_4[i] + h * (u_4[i]+(1-tau)*
((1.0/x_7[i])*(p[i]*(alpha*(x_3[i]+x_4[i])^alpha1*x_2[i]^alpha2-u_1[i])
-sigma*x_1[i]-w[i]*x_2[i])-rhok[i]*x_3[i]-delta*(x_3[i]+x_4[i])rhor[i]*x_4[i]));
s.t. dgl_5 {i in 0..n-1}: x_5[i+1] = x_5[i] + h * (-1.0*u_4[i]+
(1-tau)*rhom[i]*x_5[i]);
s.t. dgl_6 {i in 0..n-1}: x_6[i+1] = x_6[i] + h * ((1-tau)*rhor[i]
*x_4[i]);
s.t. dgl_7 {i in 0..n-1}: x_7[i+1] = x_7[i] + h * (log(1+zin[i])*
(-x_7[i]));
####################################################################
# ANGABE DER ZUSTANDS- UND STEUERBESCHRAENKUNGEN
#
####################################################################
s.t. beschr_1 {i in 0..n-1} : u1_min <= u_1[i] <= u1_max;
s.t. beschr_2 {i in 0..n-1} : u2_min <= u_2[i] <= u2_max;
s.t. beschr_3 {i in 0..n-1} : u3_min <= u_3[i] <= u3_max;
s.t. beschr_4 {i in 0..n-1} : u4_min <= u_4[i] <= u4_max;
s.t. beschr_5 {i in 0..n-1} : 50.0 - x_1[i] <= 0.0;
s.t. beschr_6 {i in 0..n-1} : 0.0 <= x_2[i];
s.t. beschr_7 {i in 0..n-1} : 0.0 <= x_3[i];
s.t. beschr_8 {i in 0..n-1} : -kappa*x_4[i]+x_3[i]<= 0;
s.t. beschr_9 {i in 0..n-1} : -x_5[i] <= 0.0;
####################################################################
# ANGABE DER ANFANGSSCHAETZUNGEN
#
####################################################################
let {i in 0..n-1} u_1[i] := u1_min;
let {i in 0..n-1} u_2[i] := u2_min;
let {i in 0..n-1} u_3[i] := u3_min;
let {i in 0..n-1} u_4[i] := u4_min;
####################################################################
# AUSWAHL DES SOLVERS
#
####################################################################
# option solver loqo;
option solver ipopt;
option abs_boundtol 1;
#option rel-boundtol 1e-4;
####################################################################
108
A Beispieldateien: AMPL-Code
# ANGABE DER OPTIONALEN LOQO-OPTIONS
#
####################################################################
#
option loqo_options "verbose=2 timing=1 maxit=500";
####################################################################
# BEFEHL ZUM LOESEN DES PROBLEMS
#
####################################################################
solve;
####################################################################
# AUSGABE IN DIE JEWEILIGEN DATEIEN
#
####################################################################
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_1[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx1e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_2[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx2e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_3[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx3e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_4[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx4e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_5[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx5e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_6[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx6e.dat’;
printf {i in 0..n} "%12.6f %12.6f\n", i*h, x_7[i]
> ’/u/balzern/
LOQO/Risikoscheu/vx7e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_1[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda1e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_2[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda2e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_3[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda3e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_4[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda4e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_5[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda5e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_6[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda6e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_7[i] > ’/u/balzern/
LOQO/Risikoscheu/vlambda7e.dat’;
109
A Beispieldateien: AMPL-Code
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_4[i]-dgl_5[i] > ’
/u/balzern/LOQO/Risikoscheu/vsigma4e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, dgl_1[i]-(dgl_4[i]*tau
*p[i])/x_7[i] > ’/u/balzern/LOQO/Risikoscheu/vsigma1e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_1[i]
> ’/u/balzern/
LOQO/Risikoscheu/vu1e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_2[i]
> ’/u/balzern
LOQO/Risikoscheu/vu2e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_3[i]
> ’/u/balzern/
LOQO/Risikoscheu/vu3e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, u_4[i]
> ’/u/balzern/
LOQO/Risikoscheu/vu4e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, rhok[i]
> ’/u/balzern/
LOQO/Risikoscheu/rhokv.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, rhor[i] +rhom[i] > ’
/u/balzern/LOQO/Risikoscheu/rhormv.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, ((1-tau)/(1+kappa))*
(0.05*dgl_4[i]+dgl_6[i]*rhor[i]-dgl_5[i]*rhom[i])
> ’/u/balzern/LOQO/
Risikoscheu/vmju1theo.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, ((1-tau)*dgl_4[i]*(p[i]
-sigma))/x_7[i]
> ’/u/balzern/LOQO/Risikoscheu/vmju2theo.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, -(1.0/h)*beschr_5[i] > ’
/u/balzern/LOQO/Risikoscheu/vmju1e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_6[i] > ’
/u/balzern/LOQO/Risikoscheu/vmju1be.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_7[i] > ’
/u/balzern/LOQO/Risikoscheu/vmju3e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, -(1.0/h)*beschr_8[i] > ’
/u/balzern/LOQO/Risikoscheu/vmju2e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, (1.0/h)*beschr_9[i] > ’
/u/balzern/LOQO/Risikoscheu/vmju5e.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, 0.8*(u_4[i]+(1-tau)*
((1.0/x_7[i])*(p[i]*(alpha*(x_3[i]+x_4[i])^alpha1*x_2[i]^alpha2u_1[i])-sigma*x_1[i]-w[i]*x_2[i])-rhok[i]*x_3[i]-delta*(x_3[i]+x_4[i])rhor[i]*x_4[i])) > ’/u/balzern/LOQO/Risikoscheu/vu3theo.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, 0.05+0.01*sin(k[i]-(pi/2))
> ’/u/balzern/LOQO/Risikoscheu/preis.dat’;
printf {i in 0..n-1} "%12.6f %12.6f\n", i*h, 2*exp(0.02*i*h) > ’
110
A Beispieldateien: AMPL-Code
/u/balzern/LOQO/Risikoscheu/kosten.dat’;
111
B Eidesstattliche Erklärung
Ich versichere hiermit, dass ich diese Arbeit selbständig verfasst habe und neben
der beiden Optimierungspakete, LOQO von Prof. R. J. Vanderbei und IPOPT von
A. Wächter und L. T. Biegler, keine weiteren als die im Literaturverzeichnis angegebenen Hilfsmittel verwendet habe.
Münster, den 30. Juli 2006
112
C Danksagung
Herrn Prof. Dr. Maurer danke ich für die interessante Themenstellung und stets
wohlwollende und freundliche Betreuung. Des Weiteren gilt mein Dank Herrn Georg
Vossen sowie Herrn K. Theißen für die zahlreichen Hilfestellungen.
113
D Literaturverzeichnis
[1] Ch. Büskens: Optimierungsmethoden und Sensitivitätsanalyse für optimale
Steuerprozesse mit Steuer- und Zustandsbeschränkungen, Dissertation am Institut für numerische und instrumentelle Mathematik der Universität Münster,
1998.
[2] N. A. Derzko, S. P. Sethi, G. L. Thompson: Necessary and sufficient conditions for optimal control of quasulinear partial differential systems, Journal of
Optimization Theory and Applications, S. 89-101, 1984.
[3] G. Feichtinger, R. F. Hartl: Optimale Kontrolle ökonomischer Prozesse, Walter
de Gruyter, Berlin, New-York, 1986.
[4] R. F. Hartl, S. P. Sethi, R. G. Vickson: A Survey of the Maximum Principle
for Optimal Control Problems with State Constraints, SIAM Review, Vol. 37,
S. 181-218, Juni 1995.
[5] J. R. Kim:Optimierungsmethoden und Sensitivitätsanalyse für optimale bangbang Steuerungen mit Anwendungen in der Nichtlinearen Optik, Dissertation
am Institut für numerische und instrumentelle Mathematik der Universität
Münster, 2002.
[6] H. W. Knobloch, F. Kappel: Gewöhnliche Differentialgleichungen, B. G. Teubner Verlagsgesellschaft, Stuttgart, 1974.
[7] B. Koslik: Entwicklung eines komplexen Unternehmensmodells und numerische
Berechnung optimaler Steuerungen mit direkten und indirekten Verfahren, Diplomarbeit, Technische Universität München, Mai 1994.
[8] J. Lesourne, R. Leban: La Substitution Capital-Travail au Cours de la
Croissance de l‘Entreprise, Revue d‘Economie Politique, Vol. 4, S. 540-564,
1978.
[9] D. G. Luenberger: Introduction to Linear and Nonlinear Programming,
Addison-Wesley Publishing Company, Inc., Reading, Massachusetts, 1973.
114
D Literaturverzeichnis
[10] H. Maurer: Optimale Steuerprozesse, Vorlesung der Westfälischen Wilhelms
Universität Münster, WS 02/03.
[11] H. Maurer: On the Minimum Principle for Optimal Control Problems with State
Constraints, Schriftenreihe des Rechenzentrums der Universität Münster, ISSN
o344-o842, Oktober 1979.
[12] H. Maurer: On Optimal Control Problems with Bounded State Variables and
Control Appearing Linearly, SIAM Journal on Control and Optimization, Vol.
15, No. 3, 1976.
[13] H. Maurer: Optimierung, Vorlesung der Westfälischen Wilhelms Universität
Münster, WS 01/02.
[14] L. Perridon, M. Steiner: Finanzwirtschaft der Unternehmung, Verlag Vahlen,
11 Auflage.
[15] R. T. Rockafellar: Convex Analysis, Princeton Univ. Press, Princeton, 1970.
[16] R. J. Vanderbei, D. F. Shanno: An Interior-Point Algorithm for Nonkonvex
Nonlinear Programming, Computational Optimization and Applications, Vol.
13, S. 231-252, 1999.
[17] A. Wächter, L. T. Biegler: On the Implementation of an Interior-Point Filter
Line-Search Algorithm for Large-Scale Nonlinear Programming, Mathematical
Programming 106(1), pp. 25-57, 2006 (As Research Report RC 23149, IBM T.
J. Watson Research Center, Yorktown, USA.
[18] S. Winderl, B. Naumer: On a State Constrained Optimal Control
Problem in Economics with Four Linear Controls, Preprint 00-9,
< http://www.zib.de/dfg-echtzeit/Publikationen >.
115