Grundlagen elektromechanischer Energiewandler
Werbung

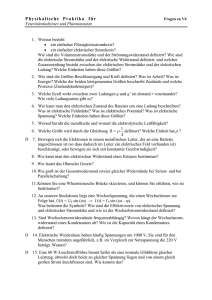
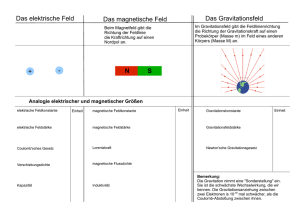
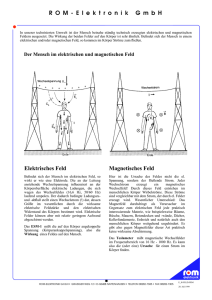
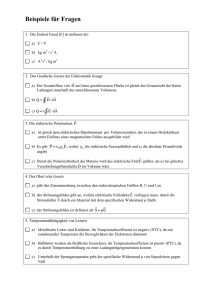
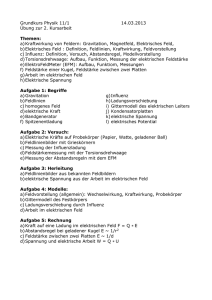
1 Grundlagen elektromechanischer Energiewandler In Kapitel 1 werden nach einem Überblick über die Vielfalt unterschiedlicher elektromechanischer Energiewandler und Schwerpunkte ihrer Einsatzgebiete die elektrotechnischen Grundlagen zusammengestellt, die für das Verständnis der Funktionsweise der elektromechanischen Energiewandlung notwendig sind. Auf weiterführende Literatur wird in allen Kapiteln durch Nennung entsprechender Literaturstellen im Text verwiesen, die im Anhang detailliert aufgelistet sind. Dabei wurde hauptsächlich deutschsprachige und englischsprachige Literatur aufgeführt. Eine Übersetzung englischer Fachbegriffe ins Deutsche (und umgekehrt) gelingt ausgezeichnet mit dem Fachwörterbuch Bezner (1993). 1.1 Ü berblick und Bedeutung elektromechanischer Energiewandler Elektrische Maschinen sind elektromechanische Energiewandler und formen als Motoren elektrische Energie in mechanische Bewegungsenergie um, während sie als Generatoren umgekehrt mechanische Bewegungsenergie in elektrische Energie umwandeln. a ) Mechanische Charakterisierung der Energiewandler: Bei elektromechanischen Energiewandlern kann die mechanische Bewegung linear oder rotierend erfolgen, so dass zwischen Linearmaschinen und rotierenden elektrischen Maschinen unterschieden wird. Dabei muss das bewegte Medium nicht notwendigerweise ein Festkörper sein. Bei den magnetohydrodynamischen (MHD-) Wandlern wird ein elektrisch leitfähiges Fluid, zumeist ein heißes, ionisiertes Gas, in einem Magnetfeld bewegt (MHD-Generator: Schmidt EF 1975; Komarek 1995), oder durch elektromagnetische Kräfte bewegt (z. B. MHD-Plasmaantrieb für Satelliten). Das feststehende Teil der elektrischen Maschine heißt i. A. Stator (Ständer), das bewegte Teil Rotor (Läufer). Beim Beispiel des MHD-Generators ist der Läufer ein bewegtes Fluid. Erfolgt die Bewegung nicht kontinuierlich, sondern diskontinuA. Binder, Elektrische Maschinen und Antriebe, DOI 10.1007/978-3-540-71850-5_1, © Springer-Verlag Berlin Heidelberg 2012 1 2 1 Grundlagen elektromechanischer Energiewandler Bild 1.1-1 Elektrische Maschine als Antrieb einer mit ihr gekuppelten Arbeitsmaschine: a) rotatorisches Prinzip, b) translatorisches Prinzip (Linearprinzip) ierlich in Bewegungsschritten, spricht man von Schrittantrieben, die hauptsächlich im kleinen Leistungsbereich unter typisch 100 W eingesetzt werden. Beispiel 1.1-1: Elektromotor (Bild 1.1-1a) Der Elektromotor ist ein rotatorischer elektromechanischer Energiewandler, der elektrische Energie aus dem elektrischen Netz entnimmt und in mechanische Energie umformt. Diese Energie wird zum Antrieb einer mechanischen Arbeitsmaschine, z. B. einer mit dem Elektromotor gekuppelten Pumpe benötigt. Die Drehzahl des rotierenden Läufers (Rotors) des Elektromotors nM ist bei direkter Kupplung mit der Arbeitsmaschine auch die Drehzahl nA dieser Arbeitsmaschine. Beispiel 1.1-2: Linearmotor (Bild 1.1-1b) Linear bewegende Elektromotoren (Linearmaschinen) sind durch die Geschwindigkeit vM ihres bewegten Sekundärteils gekennzeichnet, die in der Regel auch die Geschwindigkeit vA der angetriebenen Arbeitsmaschine ist. Linearmaschinen werden z. B. in Werkzeugmaschinen verwendet, aber auch bei Hochgeschwindigkeitszügen im Verbund mit magnetischem Schweben (z. B. Transrapid-Versuchsstrecke im Emsland: vM, max = 500 km/h, Transrapid in Schanghai/China: vM, max = 430 km/h, Yamanashi-Projekt in Japan: vM, max = 550 km/h). b) Elektrische Charakterisierung der Energiewandler: Die elektrische Energie wird überwiegend entweder in Gleichstromsystemen oder in Wechselstromsystemen bzw. Drehstromsystemen verwendet. Demgemäß wird zwischen Gleichstrom- oder Wechselstrom- bzw. Drehstrommaschinen unterschieden. Für diese unterschiedlichen Systeme unterscheiden sich die Bauweisen der elektrischen Maschinen grundsätzlich. Die elektrische Energie kann dabei in der Form konstanter Gleich- oder Wechselspannungen, im letzteren Fall mit konstanter Frequenz, für den Betrieb der elektrischen Maschinen verwendet werden. Man spricht vom Netzbetrieb z. B. am Batterienetz bei Gleichstrommaschinen oder am öffentlichen Drehstromnetz bei Drehstrommaschinen. Mit Hilfe rotierender elektrischer Umformer – das sind wieder elektrische Maschinen – oder mit Hilfe leis- 1.1 Überblick und Bedeutung elektromechanischer Energiewandler 3 tungselektronischer Schaltungen können die Amplituden der Gleich- und Wechselspannungen und im letzteren Fall auch ihre Frequenz verändert werden, so dass die damit gespeisten elektrischen Maschinen ebenfalls ihr Betriebsverhalten verändern, z. B. eine in weiten Bereichen veränderbare Drehzahl aufweisen. Dabei überwiegen in der Anwendung heute die Wechsel- und Drehstrommaschinen, so dass in diesem Buch nach einer Zusammenstellung der wichtigsten elektrotechnischen Grundlagen in diesem Kapitel 1 mit den Grundlagen für das Verständnis der Wechsel- und Drehstrommaschinen begonnen wird (Kapitel 2 bis 4). Da eine elektromechanische Energiewandlung mit Mehrphasensystemen (Drehstromsysteme) im Vergleich zum Einphasensystem (Wechselstromsystem) einen deutlich besseren Wirkungsgrad aufweist und keine zeitlich pulsierende Leistung verursacht, sind die meisten größeren elektrischen Maschinen ab einer Bemessungsleistung von ca. 1 kW mehrphasig ausgeführt. Diese mehrphasigen elektrischen Maschinen funktionieren auf der Basis rotierender magnetischer Felder, die in der Regel von im Stator ruhenden, elektrisch betriebenen Spulensystemen erregt werden. Es werden zwei Gruppen unterschieden. Bei den Synchronmaschinen bewegt sich der Läufer gleich schnell wie das magnetische Feld, bei den Asynchronmaschinen ist der Läufer i. A. entweder langsamer oder schneller als das Magnetfeld. Kapitel 5 bis 7 sind den Asynchronmaschinen gewidmet, Kapitel 8 bis 10 den Synchronmaschinen. Kapitel 11 beschreibt die Gleichstrommaschinen. Alle diese Maschinentypen können als Linear- oder als Rotationsmaschinen ausgeführt werden. Wegen der überwiegend rotativ eingesetzten elektrischen Maschinen sind die Darstellungen hauptsächlich auf die Rotationsbewegungen beschränkt. c) Charakterisierung der Energiewandler anhand der Betriebsweise: Man unterscheidet das stationäre und das dynamische Betriebsverhalten elektromechanischer Energiewandler. Beim stationären Betriebsverhalten sind die wesentlichen mechanischen und elektrischen Betriebsgrößen Drehzahl, Drehmoment, Spannungs- und Stromamplitude bzw. bei Wechsel- und Drehstrommaschinen auch deren Frequenz oder Phasenwinkel zeitlich konstant. In den Kapiteln 5 bis 11 wird dieses stationäre Betriebsverhalten der Wechselstrom-/Drehstrommaschinen und Gleichstrommaschinen anhand der stationären Betriebskennlinien beschrieben. Beim Einschalten oder Ausschalten elektrischer Maschinen, bei plötzlichen Laständerungen, aber auch bei Betriebsstörungen wie dem elektrischen plötzlichen Kurzschluss, ändern sich die Betriebsgrößen u. U. sehr rasch (z. B. im Millisekundenbereich). Dieses dynamische Betriebsverhalten kann in der Regel nicht mehr durch Kennlinien beschrieben werden, sondern wird durch den Zeitverlauf der Betriebsgrößen charakterisiert. Die Grundlagen zum Verständnis des dynamischen Betriebsverhaltens werden für die drei Grundtypen Gleichstrommaschine, Asynchronmaschine, Synchronmaschine in den Kapiteln 12 bis 16 dargestellt. d) Bedeutung der elektromechanischen Energiewandler: Der effiziente Bau und der verlustarme Betrieb moderner Energiewandler fußt nicht nur auf der profunden Kenntnis der elektromagnetischen Grundgesetze, die 4 1 Grundlagen elektromechanischer Energiewandler bereits in der zweiten Hälfte des vorigen Jahrhunderts bekannt waren, sondern auch auf dem Fortschritt der Werkstofftechnologie, der Fertigungstechnik und des Maschinenbaus, sowie auf dem vermehrten Einsatz ausgefeilter numerischer Berechnungsmethoden wie z. B. mechanischer und elektromagnetischer Berechnungen mit der Methode der Finiten Elemente, der erst durch die moderne Computertechnologie möglich ist (Eriksson 2001). Die Wirkungsprinzipien elektromechanischer Energiewandler sind als überliefertes Wissensgut der Elektroingenieure der ersten Stunde aus der zweiten Hälfte des 19. Jahrhunderts anzusehen. Neben der elektromechanischen Energiewandlung waren übrigens nahezu alle uns heute bekannten Wandlerprinzipien bereits zur vorigen Jahrhundertwende bekannt, so z. B. auch das Funktionsprinzip der Brennstoffzelle, der elektrochemischen Batterien und Akkumulatoren, aber auch der MHD-Wandler (Schmidt 1975). Ihr effizienter Einsatz ist jedoch nur durch das unermüdliche Bestreben, die Umsetzung dieser Wirkprinzipien zu verbessern und durch den Einsatz der Leistungselektronik, um den Energiewandlern neue Einsatzbereiche zu eröffnen, möglich geworden (Leijon 1998). Aktuelle Entwicklungen bei den elektromechanischen Energiewandlern wie • Hochdrehzahlantriebe, Bild 1.1-2a (Canders W-R 1998; Schneider et al. 2006), • supraleitende Generatoren, Bild 1.1-2b (Komarek P 1995; Eckels et al. 2005), • Plasma- und Ionenantriebe (Auweter-Kurtz 1992), • Erhöhung der Ausnutzung der Wandler zwecks Volumenverringerung, • Ersatz von verschleißbehafteten mechanischen Komponenten (z. B. Getriebe, Ventile) durch elektrische Antriebselemente (Direktantriebe (Gißler 2005), Magnetlager (Schweitzer et al. 1993)), • Erhöhung des Wirkungsgrads zwecks Senkung der Kosten und Schonung der Umwelt (Doppelbauer 2007), • Anpassung an das Optimum des Prozesses durch Drehzahlveränderbarkeit (z. B. bei Pumpen und Schiffsantrieben als Ersatz von Festdrehzahlantrieben), wiederum verbunden mit deutlichen Wirkungsgradvorteilen (Auinger 2000), kennzeichnen diesen Fortschritt. Basis dazu sind der Elektromagnetismus und sein Zusammenwirken mit der Leistungselektronik, der Regelungs- und Automatisierungstechnik, der Mikroelektronik und Sensortechnik und den vielfältigen Anwendungen im Maschinenbau, die im unteren Leistungsbereich unter dem Schlagwort mechatronische Antriebslösungen zusammengefasst werden. Dank der ständigen Weiterentwicklung dieser elektromechanischen Energiewandler in der Form von Generatoren als wesentliche Komponenten der elektrischen Energieerzeugung und -verteilung, und in der Form von Motoren für die elektrische Energieanwendung in der Industrie, in Gewerbe und Haushalt ist es uns möglich, die komfortable elektrische Energie nutzbringend für unsere Gesellschaft flächendeckend, kostengünstig, mit gleichbleibender Qualität und zu jeder Zeit gesichert zur Verfügung zu haben. Elektrische Energiewandler haben damit einen bedeutenden Anteil am hohen Niveau des Wohlstands unserer Gesellschaft. 1.2 Vielfalt elektrischer Maschinen 5 Bild 1.1-2 a Magnetgelagerter 40 kW-Permanentmagnet-Synchronmotor mit Kohlefaserbandage zur Läufermagnetbefestigung bei 40000/min als Kompressorantrieb, oben: PM-Läufer mit zwei Radialmagnetlagern, unten: axialer Schnitt durch den Motor (Mitte) und die beiden Radialmagnetlager (links und rechts). (Quelle: Klohr 2007), b Zweipoliger 4 MW-Synchrongenerator für Schiffe, 3600/min, 60 Hz, Hochtemperatur-Supraleiterwicklung im Läufer, Neon-Kaltgaskühlung, 30 K. (Quelle: Siemens AG) 1.2 Vielfalt elektrischer Maschinen a ) Unterschiedliche Bauarten elektrischer Maschinen: Elektrische Maschinen werden in einem weiten Leistungsbereich von ca. 12 Zehnerpotenzen von ca. 1 mW bei Kleinstantrieben bis ca. 2 GW bei den weltgrößten Kernkraftwerksgeneratoren gebaut und eingesetzt (Sedlazeck et al. 2009). Neben den bereits erwähnten Grundtypen der Gleichstrom- und Wechselstrommaschinen sind eine Vielzahl weiterer Kombinationen bekannt und viele davon auch in größeren Stückzahlen im Einsatz. Diese Sonderbauarten elektrischer Maschinen wurden u. A. deshalb erfunden, um auch am Drehstromnetz ohne Einsatz der Leistungselektronik oder rotierender Umformer drehzahlveränderbare Antriebe zu erhalten. Wesentliche Vertreter sind die Drehstrom-Kommutatormaschinen, deren Aufbau dem der Gleichstrommaschinen ähnlich ist, aber die am Drehstromnetz drehzahlveränderbar betrieben werden (Richter 1950; Andresen 1960). Ebenfalls auf der Bauweise der Gleichstrommaschine basiert der für den drehzahlveränderbaren Betrieb am Wechselstromnetz geeignete Repulsionsmotor. Eine Sonderform der Gleichstrommaschine ist die Unipolarmaschine, die – anders als die Gleichstrommaschine – nicht nur an ihren Klemmen, sondern auch in ihrem „Inneren“ – nur elektrische Gleichgrößen aufweist. Für die Umwandlung von Gleichstrom in Wechselstrom und umgekehrt wurden – wieder auf Basis der Gleichstrommaschinen-Bauform – Einankerumformer entwickelt, für die Umformung von Einphasenin Mehrphasensysteme größerer Leistung rotierende Umformersätze, die sich der Sonderbauform der Scherbius-Hintermaschine als einer Komponente des Umformersatzes bedienten. Für die Erzeugung oder den Betrieb bei deutlich höheren Frequenzen als 50 Hz oder 60 Hz wurden als Sonderformen der Synchronmaschinen 6 1 Grundlagen elektromechanischer Energiewandler „Mittelfrequenzmaschinen“ im Bereich bis ca. 2 kHz erfunden, die als Hetero- oder Homopolarmaschinen ausgeführt wurden (Richter et al. 1963). Diese und weitere neuere Sonderbauformen (z. B. Binder 1996) sind aber im Vergleich zu den unten angeführten Grundtypen elektrischer Maschinen weit weniger verbreitet. Vor allem sind sie durch den zunehmenden Einsatz der Leistungselektronik, die eine Umformung von Gleichstrom- und Wechselstromsystemen ohne bewegte mechanische Teile gestattet, verdrängt worden. Durch die Kombination leistungselektronischer Steller mit den drei Grundtypen elektrischer Maschinen Gleichstrommaschine, Synchron- und Asynchronmaschine lassen sich alle wesentlichen Betriebscharakteristiken am Gleichstrom- und Wechselstrom- bzw. Drehstromnetz darstellen, so dass auf die erwähnten Sonderbauformen in der Regel verzichtet werden kann. Deshalb ist dieses Buch nur den drei Grundtypen der elektrischen Maschine gewidmet, der Asynchronmaschine, der Synchronmaschine und der Gleichstrommaschine. Ihr Einsatzbereich ist sehr breit gefächert (Binder et al. 2003, 2005) und wird im Folgenden – ohne Anspruch auf Vollständigkeit – stichwortartig überflogen. b) Unterschiedliche Einsatzgebiete elektrischer Maschinen: b1) Gleichstrommaschinen: Kleinmotoren: Kleinmotoren mit Permanentmagneterregung (Bild 1.2-1a) sind im Bereich von wenigen Watt bis einigen 100 Watt Leistung im Einsatz z. B. als Hilfsantriebe im Kraftfahrzeug (Fensterheber, Spiegelverstellung, …), als Spielzeugmotoren (Modellbahn, Modellflug, …), in Konsumgütern (Videogeräte, HiFi-Anlagen, …), in feinmechanischen Instrumenten, … (Lazaroiu 1976; Stölting et al. 2001). Drehzahlveränderbare Antriebe: In der drehzahlveränderbaren Antriebstechnik im Leistungsbereich von einigen hundert Watt bis mehreren Megawatt Maschinenleistung sind Gleichstrommaschinen (Bild 1.2-1b) zumeist in Kombination mit Stromrichtern im Einsatz. Die Veränderung der Drehzahl ist auf Grund der variablen Gleichspannung durch den Stromrichter möglich, daher ergibt sich ein vielfältiger Einsatz in Elektroautos und Gabelstaplern, als Antrieb in Kranen, Drahtziehmaschinen, Walzwerken, Papierund Druckmaschinen, Extrudern, Kalandern, Prüfstandsgeneratoren, als U-BootUnterwasserantriebe, Straßenbahn-, U-Bahn-, Vollbahnantriebe,… (Auernhammer et al. 1992; Heil 1995). b2) Wechselstrommaschinen: Diese Maschinen werden direkt am Einphasen-Wechselstromnetz (z. B. 230 V, 50 Hz) betrieben. Kleinmotoren: Der Leistungsbereich der Wechselstrom-Kleinmotoren umfasst wenige Watt bis einige hundert Watt bzw. einige kW (Lazaroiu 1976; Stölting et al. 2001), wobei unterschiedliche Bauweisen unterschieden werden. 1.2 Vielfalt elektrischer Maschinen 7 Bild 1.2-1 a Gleichstrom-Kleinstmotoren für Präzisionsantriebe im Wattbereich. (Quelle: Faulhaber), b Fremderregte Gleichstrommaschine vierpolig mit aufgebautem Fremdlüfter als drehzahlveränderbarer Industrieantrieb 0 … 4500/min, 100 kW, 400 V. (Quelle: Siemens AG) Universalmotoren: Universalmotoren sind Gleichstrommotoren mit Reihenschluss-Erregerwicklung mit einfachem Stromrichter als Phasenanschnittsteuerung (Triac-Schaltung) als drehzahlveränderbarer Antrieb in einer Vielzahl von Haushaltsgeräten (Staubsauger, Mixer, Waschmaschinen, Elektrowerkzeuge wie Bohr- und Schleifmaschinen, Elektrorasenmäher,…), Einphasen-Asynchronmaschinen und Spaltpol-Asynchronmaschinen: Diese Käfigläufer-Asynchronmaschinen sind Konstantdrehzahlantriebe in Kleingeräten als Lüfterantriebe, in Klimageräten, Haushaltspumpen, Waschmaschinen. Großmaschinen: Wechselstrommaschinen wurden als Motoren bis ca. 1.5 MW gebaut, und zwar nur als Einphasen-Reihenschluss-Kommutatormotoren (= „überdimensionaler Universalmotor“) bei Vollbahnen als Lokomotivantrieb älterer Bauart, der noch bei zahlreichen Bahngesellschaften vor allem in Deutschland, Österreich, Schweiz, Norwegen, … in Betrieb ist. Als Stromerzeuger sind einphasige Synchrongeneratoren zur Einspeisung in das einphasige Bahnnetz im MW-Bereich im Einsatz. b3) Drehstrommaschinen: b3.1) Synchronmaschinen Kleinmotoren: Der Leistungsbereich der Kleinmotoren umfasst wenige Watt bis einige hundert Watt. Der Läufer der Synchron-Kleinmotoren ist zumeist permanentmagneterregt. Bei Netzspeisung ist die Drehzahl direkt zur Netzfrequenz (z. B. 50 Hz oder 60 Hz) proportional und wird als Antrieb z. B. für Synchronuhren (auch mit Einphasenspeisung) verwendet. Mit einem Umrichter, der Spannungen variabler Amplitude und Frequenz erzeugt, entsteht ein drehzahlveränderbarer Motor (Gutt 1990) mit kontinuierlicher 8 1 Grundlagen elektromechanischer Energiewandler Drehbewegung oder bei schrittweiser Anspeisung mit Ruckbewegungen als Schrittmotor (Rummich (Hsg.) 1992; Kenjo et al. 1995). Schrittmotoren werden entweder mit Permanentmagnet-Läufer oder Reluktanzläufer oder einer Mischung aus beiden als Hybrid-Schrittmotoren ausgeführt. Bei Rückführung der Information über die Läuferlage an den speisenden Umrichter wird eine höhere Kurzzeit-Überlastbarkeit erreicht. Es entsteht der im kleinen Leistungsbereich „Elektronikmotor“ genannte Umrichter-Antrieb mit Permanentmagnet-Synchronmaschine mit Einsatzgebieten z. B. in HiFi- und Multimediageräten (z. B. Antrieb im CD-Player, in Kameras), in der Medizintechnik (Merwerth 2003), als Lüftermotor in Computern o. ä. mit dem Vorteil gegenüber Gleichstrom-Kleinmotoren, keine Bürstenkontakte zu benötigen. Industrieantriebe: Mit Permanentmagnetläufer und Umrichterspeisung (Mohan 1995) wird die Synchronmaschine von ca. 100 Watt bis einige kW („brushless DC“-Antrieb) als drehzahlveränderbarer Antrieb und Positionierantrieb (mit Positionslagegeber) in Werkzeugmaschinen, Elektroautos, Verpackungsmaschinen, Robotern, Spinnmaschinen, Textilfasererzeugung, ... eingesetzt. a) Mit Reluktanzläufer wird der Synchronmotor im gleichen Leistungsbereich ebenfalls eingesetzt, ist dadurch kostengünstiger, hat aber dafür eine geringere Leistung bei gleicher Motorgröße (Gutt 1988). b)Mit elektrischer Läufererregung und Umrichterspeisung wird die Synchronmaschine als Großantrieb im Bereich von ca. 1 MW… 100 MW in Walzwerken anstelle der älteren Gleichstromtechnik (von Musil et al. 1988) eingesetzt; weitere Einsatzgebiete sind Kompressor- und Großgebläseantriebe (Bathia et al. 1998; Neidhöfer et al. 1999), elektrische Schiffsantriebe (Bild 1.2-2a, Jokinen et al. 2005), Rohrmühlen- und Drehofenantriebe (Salzmann et al. 1980), Bahnantriebe (Steimel 2004). Stromerzeuger: Als Stromerzeuger mit i. A. elektrisch erregtem Läufer sind Synchrongeneratoren von wenigen kW bis ca. 2 GW in Kraftwerken im Einsatz. Mit ca. 2 GW Bemessungsleistung sind sie die größten bis dato gebauten elektrischen Maschinen überhaupt. Sie finden Einsatz in einem weiten Bereich der Stromerzeugung als Notstromaggregate, Lichtmaschinen in Kraftfahrzeugen, Bordnetzgeneratoren in Schiffen und Flugzeugen, in Kleinwasserkraftwerken, Windkraftanlagen, vor allem als Kraftwerksgeneratoren als der Generatortyp schlechthin in allen Kraftwerken ab ca. 1 MW bis 1.8 GW Leistung, mit Wasserturbinen-, Dampfturbinen- und Gasturbinenantrieb je nach Kraftwerkstyp (Bild 1.2-2b). b3.2) Asynchronmaschinen Kleinmotoren: Als Drehstrommotoren werden kleine Asynchronmaschinen wegen der zu hohen Kosten eher selten eingesetzt. Hier dominiert die o. g. billigere Einphasen-Asynchronmaschine. 1.2 Vielfalt elektrischer Maschinen 9 Bild 1.2-2 Synchronmaschinen: a Getriebelose Schiffspropellerantriebe, umrichtergespeist, 2 × 14 MW, 0… 150/min, Kreuzfahrtschiff M/S „Elation“. (Quelle: Pakaste et al. 1999), b Kraftwerks-„Upgrading“ von 50 MVA auf 60 MVA: Einbau des 10-poligen Generatorläufers, Pumpspeicher-Kraftwerk Kaprun, Österreich. (Quelle: Andritz Hydro, Österreich) Industrieantrieb: Mit Käfigläufer ist der Asynchronmotor der Standard-Industriemotor schlechthin von wenigen hundert Watt bis ca. 30 MW Bemessungsleistung. Vor allem im unteren und mittleren Leistungsbereich bis ca. 500 kW als „Norm-“ und „Transnormmotor“ mit herstellerunabhängig genormten Hauptabmessungen ist er am weitesten verbreitet von allen elektrischen Motortypen. Am Drehstromnetz arbeitet er als Konstant-Drehzahl-Antrieb für Pumpen, Transportbänder, Sägen, Ventilatoren, … Mit Umrichterspeisung als drehzahlveränderbarer Antrieb ist er im Einsatz für Elektroautos, Extruder, Kalander, Aufzüge, Straßenbahn-, U-Bahn- und Vollbahnantriebe (Bild 1.2-4, Moritz et al. 1979; Maiß 1981; Steimel 2004), Kräne, Prüfstände, Werkzeugmaschinen (Binder et al. 2009), wird aber auch als Großantrieb im Bereich mehrerer MW z. B. in Bahnumformerwerken, bei Kesselspeisepumpen und Saugzuggebläsen in Kraftwerken in vielfältigster Weise verwendet. Als drehzahlveränderbarer Antrieb verdrängt er den auf Grund seiner Bürsten wartungsintensiveren Gleichstromantrieb (Kleinrath 1980). Stromerzeuger: Bis ca. 1 MW ist die Asynchronmaschine als Stromerzeuger im Einsatz als Käfigläufer (Bild 1.2-3a) und bis ca. 6 MW in der Bauform als doppeltgespeister Schleifringläufer-Asynchrongenerator mit Umrichterspeisung im Läufer und Netzspeisung im Ständer (Müller et al. 2002; Stupin et al. 2005). Bei Kleinwasserkraftanlagen und Windkraftanlagen ist er im System mit dem Umrichter i. A. kostengünstiger als der vergleichbare Synchrongenerator. Als Sonderbauform für große Leistungen in Pumpspeicher-Kraftwerken als drehzahlveränderbarer Motor-Generator wird er neuerdings auch eingesetzt z. B. mit ca. 300 MW im Pumpspeicher-Kraftwerk Goldisthal/Deutschland (Bild 1.2-3b), und an einigen Standorten in Japan. Weitere Projekte sind z. B. in der Schweiz in Planung. 10 1 Grundlagen elektromechanischer Energiewandler Bild 1.2-3 Asynchrongeneratoren: a Windgeneratoren mit Käfigläufer und Getriebe für direkten Netzbetrieb. (Quelle: Siemens AG), b Doppeltgespeiste Asynchronmaschine als Motor-Generator mit vertikaler Welle im Pumpspeicherkraftwerk Goldisthal, Deutschland, SN = 340 MVA, 2p = 18, f = 50 Hz, nsyn = 333/min, s = +10% … –5% (300 ... 346/min). Oben Schleifringe, darunter Asynchronmaschine, unten Pumpturbine. (Quelle: Andritz Hydro) Bild 1.2-4 Asynchronmotoren: a Wassergekühlte 100 kW-Fahrmotoren für die U-Bahn in Wien, Österreich (Alu-Käfig-Läufer), (Quelle: ELIN EBG Motoren GmbH), b Umrichtergespeister Industriemotor, 1 MW, Kupferkäfig, aufgesetzter Luft-Luft-Kühler, dahinter: Umrichter. (Quelle: Siemens AG) 1.3 G rundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik In diesem Abschnitt werden die für das Verständnis der Funktionsweise elektrischer Maschinen erforderlichen physikalischen Grundgesetze zusammenfassend und so einfach wie möglich dargestellt. 1.3 Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik 11 Bild 1.3.1-1 Zweites Newton’sches Axiom für a linear bewegte und b rotierende Massen 1.3.1 Mechanische Grundgesetze a) Kraft und Drehmoment Das zweite Newton’sche Axiom (1.3.1-3) besagt, dass die Kraft F, die auf eine Masse m wirkt, diese beschleunigt (Bild 1.3.1-1a), wobei die Beschleunigung a die Änderung der Geschwindigkeit v mit der Zeit t ist. Dabei ist die Geschwindigkeit v die Änderung des Ortes x der Masse m mit der Zeit t (Parkus 1966). v = dx/dt (1.3.1-1) a = dv/dt = d 2 x/dt 2 (1.3.1-2) F =m· d 2x dt 2 (1.3.1-3) Wird die Masse m im Abstand r von einem Drehpunkt starr mit einer „masselosen“ Verbindung befestigt (Bild 1.3.1-1b), so kann sie sich nur auf einer Kreisbahn bewegen. Die Verbindungslinie vom Drehpunkt zum Massenmittelpunkt (Schwerpunkt) überstreicht bei dieser Bewegung den Winkel γ. Aus dem zurückgelegten Weg x auf einem Kreisbogen folgt die Bahngeschwindigkeit v und die Beschleunigung a. (1.3.1-4) x =γ ·r a = ẍ = r · d 2 γ /dt 2 v = ẋ = r · dγ /dt, (1.3.1-5) Aus (1.3.1-3) folgt durch Multiplikation mit der Länge des Hebelarms r das 2. Newton’sche Axiom für rotierende Massen (1.3.1-6): „Drehmoment = Trägheitsmoment · Winkelbeschleunigung“. Dabei sind J das Trägheitsmoment, M das mechanische Drehmoment und Ωm die mechanische Winkelgeschwindigkeit. F ·r =m·r · 2 d 2x 2 d γ = m · r · dt 2 dt 2 ⇒ M=J · J = m · r 2 , M = F · r, d 2γ dΩm =J · dt 2 dt Ωm = dγ /dt (1.3.1-6) (1.3.1-7) 12 1 Grundlagen elektromechanischer Energiewandler Bei einer mechanischen Drehfrequenz (Drehzahl) n von einer Umdrehung je Sekunde wird genau der Winkel γ = 2π überstrichen. Daher ist die mechanische Winkelgeschwindigkeit Ωm das 2π-fache der mechanischen Drehzahl n. (1.3.1-8) Ωm = 2π · n b ) Arbeit und Leistung Die z. B. von einem Linearmotor geleistete Arbeit W, wenn er die Masse m mit einer konstanten Kraft F längs des Wegs x bewegt, ist die mechanische Energie, die dieser Linearmotor an die Arbeitsmaschine abgibt: „Arbeit = Kraft · Weg“. bei F = F · ex : W = W = F · d x, F · dx, bei F = konst.: (1.3.1-9) W =F ·x Die je Zeiteinheit t geleistete Arbeit W ist die vom Linearmotor erbrachte mechanische Leistung P: „Leistung = Kraft · Geschwindigkeit“. P = dW/dt = F · dx/dt = F · v ⇒ P = F · v (1.3.1-10) Durch Erweiterung von (1.3.1-10) mit der Länge des Hebelarms r und dessen Kehrwert 1/r wird die entsprechende Formel für die rotatorische Bewegung abgeleitet: „Leistung = Drehmoment × Winkelgeschwindigkeit“ P = F · r · dx/dt · dγ 1 =M· = M · Ωm ⇒ P = M · Ωm r dt (1.3.1-11) Die von der bewegten Masse m gespeicherte mechanische Bewegungsenergie heißt kinetische Energie, die aus (1.3.1-10) für die Bewegung in x-Richtung durch Integration berechnet wird. dx · dt = dt v2 = m · v · dv = m · 2 W = P · dt = F· m· dv · v · dt dt (1.3.1-12) Für rotierende Massen entsteht aus (1.3.1-12) durch die angegebene Umformung der Ausdruck der kinetischen Energie für rotierende Massen (1.3.1-13). In Schwungmassenspeichern (das sind rasch rotierende Massen mit hohem Trägheitsmoment) wird dieser Effekt zur Speicherung von kinetischer Energie genutzt (Hibbeler 2006a). 1.3 Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik W = m · r2 · 1 v2 Ω2m · J · = r2 2 2 13 (1.3.1-13) 1.3.2 Elektromagnetische Grundgesetze im Überblick Die Wirkprinzipien der elektromechanischen Energiewandlung beruhen auf der Anwendung der folgenden elektromagnetischen Grundgesetze (Prechtl 1995; Hambley 2008). • Die Erzeugung der magnetischen Feldstärke H durch stromdurchflossene Spulen wird durch den Ampère’schen Durchflutungssatz beschrieben. • Die berührungslose Energieübertragung von ruhenden auf bewegte Teile oder von einer Spule auf eine zweite, galvanisch getrennte Spule durch Spannungsinduzierung wird durch das Faraday’sche Induktionsgesetz bestimmt. • Die Erzeugung mechanischer Kräfte F durch die Wirkung magnetischer Felder auf stromdurchflossene Leiter beschreibt das Lorentz’sche Kraftgesetz. • Die Feldlinien der magnetischen Flussdichte B sind stets geschlossen, d. h. Nordund Südpole treten immer paarweise auf. Es sind bis jetzt keine magnetischen „Monopole“ bekannt. Die Werkstoffgesetze beschreiben: • die Wirkung von Permanentmagneten zur Magnetfelderzeugung (Hystereseschleife B( H ) in Bild 1.3.5-1), • den Stromfluss I in Leiterwerkstoffen mit dem elektrischen Widerstand R bei angelegter elektrischer Spannung U (Ohm’sches Gesetz (1.3.2-1)), lokal ausgedrückt als Verknüpfung von elektrischer Stromdichte J und elektrischer Feldstär ke E über die elektrische Leitfähigkeit κ: J = κ · E. • die Verringerung der für eine bestimmte magnetische Flussdichte B erforderlichen magnetischen Feldstärke H in magnetisierbaren (ferromagnetischen) Stof =µ·H , fen (z. B. Eisen) B • die isolierende Wirkung von elektrisch nicht leitfähigen Werkstoffen z. B. zwischen spannungsführenden Leitern und dem geerdetem metallischen Gehäuse der elektrischen Maschine. • Als Isolierwerkstoffe kommen Kunststoffe, Glas, Glimmer und Kunstharze zum Einsatz. Als Leiterwerkstoffe sind hauptsächlich Kupfer und Aluminium, fallweise auch Legierungen wie Bronzen oder Silumin, in Verwendung. Der elektrische Widerstand R der Leiterwerkstoffe nimmt mit steigender Temperatur ϑ zu (Tab. 1.3.2-1). U = R(ϑ) · I (1.3.2-1) Mit der elektrischen Stromdichte J durch die Stromdurchtrittsfläche A erhalten wir die elektrische Stromstärke. I = J · dA A (1.3.2-2) 14 1 Grundlagen elektromechanischer Energiewandler Tabelle 1.3.2-1 Vergleich von Stoffwerten der Metalle Silber, Kupfer, Aluminium, Eisen (reine Stoffe) bei ϑ = 20°C. Die Zunahme des ohm’schen Widerstands R mit der Temperatur ϑ (gemessen in °C) ist im Temperaturbereich von ca. –40°C bis + 250°C linear Silber Kupfer Aluminium Eisen R = R20°C · [1 + α · ( ϑ − 20°C)] Elektrische Leitfähigkeit κ Dichte ρ Widerstandskoeffizient α Wärmedehnung (linear) αl [S/m] [kg/dm3] [1/K] [1/K] 62.5 · 106 10.5 0.0036 19.3 · 10–6 57.0 · 106 8.9 0.0039 16.8 · 10–6 34.0 · 106 2.7 0.0040 24 · 10–6 10.0 · 106 7.9 0.0045 11.5 · 10–6 Die elektrische Spannung U als Potentialdifferenz zwischen zwei Punkten 1 und 2 ist das Wegintegral der elektrischen Feldstärke E längs des Wegs l zwischen 1 und 2. · ds U= E (1.3.2-3) l Beispiel 1.3.2-1: (1) Elektrischer Widerstand eines Leiters mit der Länge l und dem Querschnitt A, der gleichmäßig vom Strom I durchflossen wird: I= A = J · A, J · dA U = l · ds = E · l ⇒ E R = U /I = (E/J ) · l/A = l/(κ · A) (2) Verlustdichte (= Stromwärmeverluste/Volumen) im elektrischen Widerstand: p = P/V = (U · I )/(A · l) = E · J = J 2 /κ 1.3.3 Erzeugung magnetischer Felder In Abschn. 1.4 wird gezeigt, dass die elektromechanische Energiewandlung mit magnetischen Feldern - außer im Bereich der Mikromotoren – zu deutlich höheren Energiedichten führt als jene mit elektrischen Feldern. Die Erregung magnetischer Felder erfolgt mit stromdurchflossenen Spulen gemäß dem Ampère’schen Durchflutungssatz (Abschn. 1.3.4) oder mit Permanentmagneten (Abschn. 1.3.5 und Kapitel 9). a) Magnetfelderzeugung durch stromdurchflossene Spulen Vorteile: • beliebig hohe Felder möglich • Magnetfeld veränderbar über den Strom • bei großen Wandlern kostengünstiger als Permanentmagnete 1.3 Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik 15 Nachteile: • Stromwärmeverluste in den Spulen (Ausnahme: Supraleitende, gleichstromdurchflossene Spulen) • Stromversorgung nötig b) Magnetfelderzeugung durch Permanentmagnete Vorteile: • keine „Erregerverluste“ • einfacher Aufbau des Wandlers Nachteile: • Magnetfeld nicht veränderbar • Magnetwerkstoffe mit hoher Energiedichte sind relativ teuer • B-Felder auf etwa 1.2 T begrenzt • Gefahr der Entmagnetisierung im großen Gegenfeld anderer stromführender Spulen 1.3.4 Ampère’scher Durchflutungssatz und magnetischer Fluss Die Berechnung elektromagnetischer, niederfrequenter stromerregter Felder in elektrischen Maschinen erfolgt mit dem Ampère’schen Durchflutungssatz. Der Ampère’scher Durchflutungssatz lautet: In einem magnetischen Feld mit der Feldstärke H ist das Linienintegral über die magnetische Feldstärke H entlang einer geschlossenen Linie C stets gleich der gesamten elektrischen Durchflutung Θ, die durch die von der Linie C aufgespannten Fläche AC hindurch tritt. H · ds = Θ (1.3.4-1) C Ein positiver Durchtrittssinn des Stroms durch die Fläche ist gegeben, wenn der gewählte Durchlaufsinn der Kurve C die Stromflussrichtung von I rechtswendig umläuft. Wenn die vier gekrümmten Finger der rechten Hand (ab dem Zeigefinger) in Richtung des Durchlaufsinns der Kurve C weisen, so zeigt der Daumen in die Richtung des positiven Durchtrittssinns durch die von der Kurve C aufgespannte Fläche („Rechte-Hand-Regel“). Beispiel 1.3.4-1: Bestimmen Sie die elektrische Durchflutung für die Fläche und Leiteranordnung gemäß Bild 1.3.4-1! Lösung: Die Durchflutung ist Θ = N · I1 − I2, da die Windungszahl für den ersten Stromkreis N und für den zweiten Eins ist Die beiden Stromrichtungen sind unterschiedlich. Strom I1 durchfließt die Fläche gemäß der Rechten-Hand-Regel positiv, Strom I2 negativ. 16 1 Grundlagen elektromechanischer Energiewandler Bild 1.3.4-1 Geschlossene Kurve C um stromdurchflossene Leiter, Stromstärken I1, I2. Die Kurve C ist beliebig gewählt, also nicht notwendig eine „Feldlinie“ von H, so dass der Winkel zwischen dem Vektor der magnetischen Feldstärke H und der Tangente an die Kurve C i. A. nicht Null ist. (Quelle: Prechtl 1995) Wir definieren den magnetischen Fluss Φ durch eine Fläche A als das Flächenintegral des Vektorfelds der magnetischen Flussdichte B über dieser Fläche. Φ = B · dA (1.3.4-2) A Der Fluss durch eine geschlossene Oberfläche A eines Volumens V wird magnetischer Hüllenfluss genannt. Da die Flussröhren („Feldlinien“) des Vektorfelds von B stets geschlossen sind, treten eben so viele Feldlinien in positiver wie negativer Richtung durch die geschlossene Hüllfläche, so dass der Hüllenfluss als Summe aller Teilflüsse Null ist. Es gilt somit für die magnetische Flussdichte B das Gesetz vom magnetischen Hüllenfluss: Der magnetische Hüllenfluss ist stets Null! B · dA = Φ = 0 (1.3.4-3) A Anschaulich interpretiert heißt das, dass ebensoviel magnetischer Fluss Φ aus dem Volumen V aus- wie eintritt, da der Gesamtfluss über die geschlossene Oberfläche A Null ist. Folglich sind die Flussröhren von B (im Zweidimensionalen die „Feldlinien“ von B ) in sich geschlossen (Bild 1.3.4-2). Daher ist die auf die Fläche A normal stehende Komponente Bn innerhalb des Volumens V und außerhalb gleich groß („Konstanz der B-Normalkomponente)“: Bn,1 = Bn,2 (1.3.4-4) Regionen austretender Flussröhren werden „Nordpole“, Regionen eintretender Flussröhren „Südpole“ genannt. Somit besagt (1.3.4-3), dass es stets nur Nord- und Südpole gemeinsam gibt. Magnetische Monopole sind bis dato noch nicht entdeckt worden. Das magnetische Feld – auch das in elektrischen Maschinen – ist zumindest ein Dipolfeld. Die Mindest-Polzahl ist 2, nämlich ein Nord- und ein Südpol. Die Anzahl der Magnetpole wird mit 2p angegeben; es wird die Polpaarzahl p = 1, 2, 3,… verwendet. 1.3 Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik 17 Bild 1.3.4-2 Es treten ebenso viele Flussröhren bzw. Feldlinien der Flussdichte B aus dem Volumen V durch die geschlossene Oberfläche A aus wie ein, da die Flussröhren der Flussdichte geschlossen sind Beispiel 1.3.4-1: Magnetischer Eisenkreis mit Luftspalt und Erregerspule: Der Durchflutungssatz wird für die spezielle Geometrie von Bild 1.3.4-3 gemäß (1.3.4-5) vereinfacht. Die geschlossene Kurve C wird identisch mit der gestrichelten Feldlinie von H gewählt, so dass der differentielle Tangentenvektor ds in Bild 1.3.4-1 stets parallel mit dem Vektor H ist. Daher wird das Skalarprodukt der Vek · ds durch das Produkt der Algebra H · ds ersetzt. Das Feld in den torrechnung H einzelnen Jochabschnitten mit den Längen li, i = 1, …, n (Bild 1.3.4-3: n = 6 Abschnitte inklusive Luftspalt δ) ist nahezu homogen, daher wird das Integral durch eine Summe ersetzt. C H · ds = Θ = N · I ≈ n i=1 Hi li = H1 · l1 + H2 · l2 + · · · + Hn · ln (1.3.4-5) Bild 1.3.4-3 Eisenjoch (Eisenkern) mit Luftspalt und Erregerspule: Im Luftspalt soll eine magnetische Flussdichte B erregt werden. a Gestrichelt: Idealisierte Feldlinie von B (geschlossene Kurve C). b Numerisch berechnete Feldlinien der Flussdichte B als Vektorfeld. Der B-Vektor variiert ortsabhängig nach Betrag, Richtung und Orientierung 18 1 Grundlagen elektromechanischer Energiewandler Der Strom fließt in die von C aufgespannte Fläche AC in Blickrichtung hinein. Dabei bedeuten die Symbole ⊗ eine in die Papierebene weisende Stromrichtung (Gefieder des Richtungspfeils, Strom negativ), während Symbole mit • die umgekehrte Richtung (Spitze des Richtungspfeils, Strom positiv) andeuten. Das zugehörige Magnetfeld mit der in Bild 1.3.4-3 eingetragenen positiven Feldrichtung umkreist die Durchflutung im Rechtsdrehsinn. Gemäß der Rechte-Hand-Regel ist die Stromrichtung positiv zu zählen. In Bild 1.3.4-3 sind N = 4 Spulenwindungen gegeben: Θ = N · I = 4I. Wegen den geschlossenen B-Feldlinien ist bei Vernachlässigung von aus dem Eisenkreis austretenden Streufeldern der magnetische Fluss Φ in jedem Querschnitt A des Eisens konstant. Da die Flussdichte in den einzelnen Jochabschnitten als homogen angenommen wurde (was in etwa der Realität entspricht), ist sie über dem Querschnitt A konstant. Φ= B · dA ≈ B · A (1.3.4-6) A 1.3.5 V erminderung des Magnetisierungsbedarfs durch den Einsatz von Eisen Wir betrachten ein Stück Eisen im Magnetfeld einer vom Strom I erregten Spule ähnlich wie in Bild 1.3.8-1, wenn wir dort den Stabmagneten durch ein zylindrisches Eisenstück ersetzen. Der Spulenstrom I erregt eine magnetische Feldstärke H. In Luft ist die zugehörige Flussdichte B der Feldstärke H über μ0 direkt proportional. = µ0 H B (1.3.5-1) Eisen besteht aus vielen kleinen „Elementarmagneten“, den Weiss’schen Bezirken, die sich auf Grund der auf sie wirkenden Kraft im Feld H der Spule möglichst parallel zu dieser Feldrichtung auszurichten versuchen und so eine eigene resultierende Magnetflussdichte J erzeugen. Diese zusätzliche Flussdichte J wird als magnetische als zusätzliche magnetische FeldstärPolarisation oder alternativ über J = µ0 · M ke, die Magnetisierung M, bezeichnet. Die magnetische Polarisation J verstärkt im Eisen das H-Feld der Spule zur resultierenden magnetischen Flussdichte B. Die verstärkende Wirkung kommt durch die relative Permeabilität μr > 1 zum Ausdruck, die in isotropen Materialien eine reelle Zahl ist. = µr · µ0 H = µ0 H + J = µ · H >> µ0 · H B (1.3.5-2) Diese feldverstärkend wirkende „spontane“ Magnetisierbarkeit heißt Ferromagnetismus, eine Eigenschaft von Eisen, Nickel, Kobalt und den Heusler-Legierungen. Bei gleicher Flussdichte B in Luft und Eisen ist die magnetische Feldstärke H im Eisen viel kleiner als in Luft, so dass der Magnetisierungsbedarf N · I in Bild 1.3.4-3 dank des Eisenjochs deutlich kleiner für eine bestimmte Flussdichte B im Luftspalt ausfällt als ohne dieses Joch. Oberhalb der Curie-Temperatur, die z. B. für Eisen 744 °C beträgt, erlischt diese spontane Magnetisierbarkeit (Fasching 1994). Da in 1.3 Grundgesetze der Mechanik, Elektromagnetik und Drehstromtechnik 19 Bild 1.3.5-1 B(H)-Kennlinien ferromagnetischer Werkstoffe: Kurve 1: weichmagnetische Werkstoffe (z. B. Reineisen), Kurve 2: hartmagnetische Werkstoffe (Permanentmagnete), BR: Remanenzflussdichte, HCB: Koerzitivfeldstärke für das B-Feld elektrischen Maschinen die Isolierwerkstoffe der Erregerspulen schon ab ca. 180… 240 °C geschädigt werden können, ist die deutlich darüber liegende Curie-Temperaturgrenze i. A. als Temperaturgrenzwert für den Betrieb elektrischer Maschinen irrelevant. Wenn alle „Elementarmagnete“ parallel zum äußeren H-Feld ausgerichtet sind, ist der Maximalwert von J, die Sättigungspolarisation Js erreicht. Dieser Sättigungseffekt tritt bei Eisen ab ca. 1.7 T auf. Die Permeabilität μ ist daher bei kleinen Werten von B, im ungesättigten Betrieb, mit μ = ca. 5000μ0 groß, und nimmt H → ∞) = Js + µ0 H dem mit steigenden B-Werten ab, um im Grenzfall wegen B( Grenzwert μ0 zuzustreben, was als vollständige Sättigung bezeichnet wird. Bild 1.3.5-1 zeigt mit Kurve 1 qualitativ die B( H)-Abhängigkeit von weichmagnetischen Werkstoffen wie z. B. reinem Eisen. Nach dem Abschalten des Spulenstroms I verschwindet wegen des Durchflutungssatzes das Feld H, aber es verbleibt eine Restpolarisation JR, da nicht alle „Elementarmagnete“ sich beliebig regellos im Eisen ausrichten. Dies ist die Remanenzflussdichte BR = JR. Erst durch Anlegen eines negativen Felds –HCB, der Koerzitivfeldstärke für das B-Feld, wird B als resultierende Flussdichte Null. Wegen HCB = −J/μ0 ist dabei die magnetische Polarisation J noch positiv. Bei der noch größer negativen Feldstärke –HCJ, der Koerzitivfeldstärke für das J-Feld, wird J Null, wobei die Flussdichte mit B = −μ0· HCJ dann bereits negativ ist. Die so entstehende B( H )-Schleife in Bild 1.3.5-1 heißt Hystereseschleife (hysteresis (griechisch): Nachhinken, da B dem H „nachhinkt“, denn es ist noch positiv, wenn H schon negativ ist, und umgekehrt). Die im ­ma­thematisch positiven Zählsinn (Gegenuhrzeigersinn) umfahrene Fläche innerhalb der B-H-Schleife während eines Zyklus mit der Dauer T einer zeitlichen HSchw­ingung in jedem Raumpunkt des magnetisierbaren Materials entspricht der pro Volumen V und Zeit T im magnetisierbaren Material umgesetzten Wärme whys durch innere „Reibungsprozesse“ der Weiss’schen Bezirke beim Ummagnetisieren. Beim Durchlaufen eines vollen Zyklus von + Hmax auf –Hmax und wieder zurück zu + Hmax, etwa wenn I ein Wechselstrom ist, entstehen somit im magnetisierbaren Material die Hystereseverluste Phys = V whys · dV/T . Diese Verluste Phys steigen somit linear mit der Ummagnetisierungsfrequenz f = 1 / T. Bei Eisen als „weichmagnetischem Werkstoff“ ist HCB klein, so dass die Hystereseschleife schmal ist und die Hystereseverluste klein sind. Die B( H)-Kurve wird dann in der Regel ohne die schmale Schleife dargestellt (Bild 1.3.9-2). Bei Permanentmagneten als „hartmagnetischem Werkstoff “ ist durch geeignete Werkstoff- 20 1 Grundlagen elektromechanischer Energiewandler Bild 1.3.5-2 Nichtsinusförmige B-Änderung bei zeitlich sinusförmiger H-Änderung durch die nichtlineare B( H)Kennlinie: Es kann über die Sinusgrundschwingung B1 eine Ersatzkennlinie gebildet werden, die näherungsweise ein Rechnen mit zeitlich sinusförmig veränderlichen B- und H-Größen erlaubt wahl HCB stark vergrößert (Bild 1.3.5-1, Kurve 2). Die Hystereseschleife ist deutlich verbreitert. So sind z. B. beim Permanentmagnetwerkstoff Neodymium-EisenBor (NdFeB) eine Remanenzflussdichte von ca. 1…1.3 T und eine B-Koerzitivfeld­ stärke von ca. 900 … 1000 kA/m möglich. Die Permanentmagnete werden beim Betrieb elektrischer Maschinen nicht ummagnetisiert, sondern dienen zur Erzeugung von magnetischen Gleichfeldern z. B. in Gleichstrommaschinen oder im Polrad von Synchronmaschinen. Für die Permanentmagnete interessiert dann nur der Arbeitsbereich mit positiver Flussdichte B (für Nordpole) unter dem Einfluss entmagnetisierender (negativer) äußerer Felder H, also der zweite Quadrant der B( H)Schleife, und der dritte Quadrant für den Arbeitsbereich mit negativer Flussdichte B (für Südpole) (siehe Kapitel 9). Ändert sich der Spulenstrom i( t) zeitlich sinusförmig, so ändert sich auch die von ihm erregte magnetische Feldstärke H( t) in jedem Punkt des Magnetkreises in gleicher Weise: H (t) = Ĥ · sin(2π t/T ). Wegen des nichtlinearen Zusammenhangs B( H) im Eisen in Bild 1.3.5-1 ändert sich die Flussdichte B( t) nicht sinusförmig. In Bild 1.3.5-2 ist bei vernachlässigtem Hystereseeinfluss der Zeitverlauf B( t) für die positive Halbschwingung aus der Sinushalbschwingung H( t) graphisch ermittelt und zeigt eine abgeplattete Kurve B( t). Eine Rechnung mit Sinusgrößen ist nicht mehr möglich. Ermittelt man zu der Kurve B( t) die zugehörige Sinusgrundschwingung B1( t), indem man die periodische Funktion B( t) durch eine FourierReihe darstellt (Kapitel 3), so kann zu jeder Amplitude Ĥ die zugehörige Amplitude der Sinusgrundschwingung B̂1 ermittelt werden. Anstelle der B( H)-Kennlinie wird ersatzweise die Kennlinie B̂1 (Ĥ ) verwendet, die eine näherungsweise Rechnung mit Sinusgrößen ermöglicht. Wegen des abgeplatteten Verlaufs von B( t) ist gemäß Bild 1.3.5-2 B̂ < B̂1 , so dass die Ersatzkennlinie B̂1 (Ĥ ) über der magnetischen Kennlinie B( H) liegt. Alternativ ist der Fall einer zeitlich sinusförmig eingeprägten Flussdichte (z. B. über Induzierung, siehe Abschn. 1.3.6) möglich: B(t) = B̂ · sin(2πt/T ). Mit der gleichen graphischen Methode wie in Bild 1.3.5-2 http://www.springer.com/978-3-540-71849-9