Elektrische Antriebe Grundlagen und Anwendungen Übung 1
Werbung

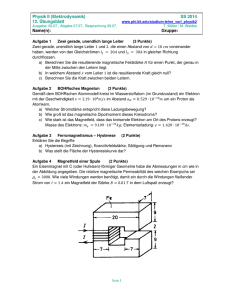
Lehrstuhl für Elektrische Antriebssysteme und Leistungselektronik Fakultät für Elektrotechnik und Informationstechnik Technische Universität München Elektrische Antriebe Grundlagen und Anwendungen Übung 1 Elektromagnetismus, Aufbau und Funktionsprinzip der Gleichstrommaschine 1 1 1.1 Theorie Leiter im Magnetfeld → − − Eine mit der Geschwindigkeit → v in einem magnetischen Feld mit der Flussdichte B bewegte Ladung q, erfährt eine Kraft. Diese sogenannte Lorentzkraft wird entsprechend Gleichung (1.1) berechnet. → − → − − F = q · (→ v × B) 1.1.1 [N ] (1.1) Kraftentstehung Ein Teil eines stromdurchflossenen Leiters erfährt in einem Magnetfeld eine Kraft −→ → − − dF = dQ · (→ v × B ). (1.2) Die Geschwindigkeit der Ladungen ist → − dl → − v = . dt Heraus ergibt sich Gleichung (1.2) → − −→ − dl → dF = dQ · ( × B ) dt → − → − dQ · (d l × B ) = dt → − → − = I · ( dl × B ) Abbildung 1.1: Stromdurchflossener Leiter im Magnetfeld. Schlussendlich ergibt sich Gl. (1.3) für die Lorentzkraft, die auf den Leiter wirkt (motorisches Prinzip). → − → → − − ⇒ F = I ·( l × B) 2 [N ] (1.3) 1.1.2 Spannungsinduktion Wird der Leiter aus Abb. 1.1 bewegt, wirkt die Kraft aus Gl. (1.1) auf die Ladungen und es wird eine Spannung induziert (generatorisches Prinzip). Diese Spannung kann mithilfe des energetischen Ansatzes berechnet werden: Arbeit ist in der Mechanik das Produkt aus Kraft und Weg: − → − → dW = F · d l Die elektrische Spannung ist die Arbeit pro Ladung U= dW dQ Die induzierte Spannung ist dann − → − → F ·d l Ui = dQ → − → − dl ·F = dQ → − → − l ·F = Q Mit Gleichung (1.1) folgt → − − → − Ui = l · (→ v × B) [V ] (1.4) Abbildung 1.2: Bewegter Leiter im Magnetfeld. 1.2 Induktionsgesetz Der magnetische Fluss Φ ist die Anzahl der Feldlinien, die eine Fläche A durchsetzen → − → − Φ = B · A = B · A · cos(θ) 3 [W b] (1.5) → − → − Sollte sich das Magnetfeld B durch eine Leiterschleife oder die Fläche A der Leiterschleife die vom Magnetfeld durchsetzt wird ändern (Abb. 1.3), wird eine Spannung in der Leiterschleife induziert, die gleich der zeitlichen Änderung des Flusses mal der Windungszahl ist Ui = −N · dΦ dt [V ]. (1.6) Abbildung 1.3: Induktion bei steigender Fläche. In Abb. 1.3 stellt sich die Richtung des Stromes so ein, dass das neue durch den Strom induzierte magnetische Feld dem ursprünglichen entgegen wirkt (in diesem Fall nach der Rechte-HandRegel im Uhrzeigersinn). 1.3 Magnetischer Kreis Zwischen den Gesetzen des magnetischen Flusses und den Gesetzen im elektrischen Stromkreis kann man eine Analogie bilden. Diese Analogie ist in Tabelle 1.1 dargestellt. Tabelle 1.1: Analogie zwischen magnetischen und elektrischen Gesetzen. elektrische Größe magnetische Größe elektrische Spannung, U magnetische Spannung, Θ elektrischer Strom, I magnetischer Fluß, Φ Widerstand, R Reluktanz, < ohmsches Gesetz, U = R · I Θ = <·Φ Konduktivität, σ Permeabilität, µ Abbildung 1.4 stellt einen magnetischen Kreis dar, erregt durch eine Spule mit Strom I und Windungszahl N , sowie einem Luftspalt der Länge g. Die Reluktanz des Luftspalts ist <g = g µ0 · A [H −1 ], (1.7) µ0 ist die Permeabilität der Luft (µ0 = 4π · 10−7 H/m), l ist die durchschnittliche Länge, und A ist die Fläche. Die Reluktanz des Eisenkerns ist <c = l , µ0 µr · A 4 (1.8) µr ist die Relativpermeabilität des Eisenkerns. Die magnetische Spannung ist Θ = N · I, und der Fluss ist Φ= Θ <summe = N ·I . <g + <c (1.9) [H] (1.10) Die Induktivität ist L= N ·Φ I und die gespeicherte magnetische Energie ist Wm = 1 · L · I2 2 [J]. (1.11) Abbildung 1.4: Magnetischer Kreis. In elektromechanischen Systemen unterscheidet man zwei Kräfte: Reluktanzkraft (Ausrichtung von Flüssen) und Lorentzkraft (stromdurchflossener Leiter im Magnetfeld). In Abb. 1.5 kann sich ein kleiner Eisenkern (Kolben) im Luftspalt des Kreises von Abb. 1.4 frei bewegen. Wenn die Spule mit einem Strom I erregt ist, bewegt sich der Kolben wodurch die Flusslinien sich ausrichten und die gesamte Länge der Linien minimiert wird. Der Fluss versucht den Weg mit der minimalen Reluktanz zu nehmen was zu einer Reluktazkraft führt, die mit Gleichung (1.12) berechnet wird. F = 1 dL dW = · I2 · dx 2 dx [N ]. (1.12) Auf diesem Konzept wird ein Hubmagnet aufgebaut. Dieser Grundaufbau hat aber einen Nachteil: der Tauchkern kann sich nur in eine Richtung bewegen. Deshalb wird immer eine Feder eingebaut, wie es in Abb. 1.6 dargestellt ist. Abbildung 1.7 zeigt einen Lautsprecher der auf dem Prinzip der Lorentzkraft aufgebaut wird. Der Vorteil bei diesem Aufbau ist die Bewegung in beide Richtungen beim umpolen des Stroms. 5 Abbildung 1.5: Reluktanzkraft im magnetischen Kreis. Abbildung 1.6: Hubmagnet. Abbildung 1.7: Lautsprecher. 6 1.4 Aufbau Gleichstrommaschine Die zwei im vorangegangen Kapitel genannten Prinzipien der Kraftentstehung und der Spannungsinduktion, stellen die wichtigsten Konzepte dar auf denen eine elektrische Maschine aufgebaut ist. In Abbildung 1.8 ist die Querprofilansicht einer zweipoligen fremderregten Gleichstrommaschine dargestellt. Die drei wesentlichen Bestandteile sind: der Stator, der Rotor, und der Kollektor. Die Erregerwicklung im Stator erzeugt das Erregerfeld, welches den Rotor durchsetzt. Durch die am Rotor angebrachte Ankerwicklung fließt der Ankerstrom. Damit wird eine Lorentzkraft erzeugt, die auf die Ankerwicklung wirkt und zu einem Drehmoment M und Drehzahl ω führt1 . Das Bürsten-Kollektor-System stellt den Kommutator der Maschine dar und hat zwei Funktionen: der Ankerstrom soll nur im Bereich des Erregerfeldes fließen und nach einer halben Umdrehung so umgepolt werden, dass die Kraft immer in die gleiche Richtung wirkt. Erregerfeld Stator Erregerwicklung Bürste Rotor Ankerwicklung Kollektor Abbildung 1.8: Querprofilansicht einer zweipoligen Gleichstrommaschine. 1 Gilt nur wenn die Ankerwicklungen in der Luft statt in Nuten angebracht sind. 7 1.4.1 Ersatzschaltbild (ESB) des Erregerkreises 1.4.1.1 Magnetisches ESB Abb. 1.9 stellt das magnetische Ersatzschaltbild des Erregerkreises dar. Der Index s steht für Stator, r für Rotor, und δ für Luftspalt. Abbildung 1.9: Magnetisches ESB des Erregerkreises. Das ohmsche Gesetz im magnetischen Kreis ist in Gleichung (1.13) dargestellt, Θe Φe = P . R Die Summe aller Reluktanzen ist P (1.13) R = Rs + Rr + 2 · Rδ . Die Flussdichte, B, ist durch B= Φe Aδ (1.14) gegeben. Aδ ist die Fläche des Luftspalts. 1.4.1.2 Elektrisches ESB Abb. 1.10 stellt das elektrische Ersatzschaltbild des Erregerkreises dar und kann mit Gl. (1.15) beschrieben werden Abbildung 1.10: Elektrisches ESB des Erregerkreises. Ue = Re · Ie + Le · 8 dIe dt (1.15) 1.4.2 Ankerrückwirkung Ein im Allgemeinen unerwünschter Effekt bei elektrischen Maschinen ist der durch die Ankerinduktivität verzögerte Stromaufbau, da er die Dynamik des gesamten Systems verschlechtert. Bei Belastung der Maschine fließt der Ankerstrom in der Ankerwicklung und erzeugt sein eigenes magnetisches Feld das das Erregerfeld stört, wie es in Abbildung 1.11 dargestellt wird. Wenn der Ankerstrom gleich null ist, überschneiden sich die geometrische neutrale Zone (GNZ) und die magnetische neutrale Zone (MNZ). Bei der Belastung der Maschine ist die magnetische neutrale Zone um einen Winkel verschoben sodass sich die Ankerwicklungen, die jeweils kommutiert werden, nicht mehr in einer feldfreien Zone befinden, was zur Induktion der Spannung in den Wicklungen und der Verzögerung des Stromaufbaus führt. Kollektor Abbildung 1.11: Ankerrückwirkung in der Gleichstrommaschine. Bei der Gleichstrommaschine führt der verzögerte Stromaufbau bei hohen Drehzahlen zu einem weiteren Nachteil am Kommutator: Wird drehzahlbedingt die für die Stromkommutierung vorgesehene Zeit kürzer als sich der Strom in der Ankerinduktivität abbauen kann, fließt der am Ende verbleibende Strom nach der Kontaktunterbrechung zwischen Bürste und Kollektorlamelle zwangsläufig über die Luft weiter und bildet dort einen Lichtbogen. Dieses sog. Bürstenfeuer bestimmt den Verschleiß des Kommutators maßgeblich mit. Da sich die Bürste immer an der magnetischen neutralen Zone ausrichten soll, ist die lastabhängige Verschiebung der Bürste nicht praktisch. Zur Minimierung dieser Effekte werden deshalb zwei konstruktive Maßnahmen ergriffen: wie in Abbildung 1.12 dargestellt, werden neben den großen Lufträumen links und rechts des Rotors zur Optimierung Wendepole (rot) und Kompensationswicklungen (blau) integriert, die in Reihe zur Ankerwicklung geschaltet sind und vom gleichen Ankerstrom durchflossen werden. Dabei rufen sie ein gegenläufiges Feld hervor, das das Ankerfeld φa idealerweise vollständig kompensiert. In Summe entsteht damit aus dem Ankerstrom deutlich weniger Fluss, was zu einer Senkung der Ankerinduktivität und damit der Ankerzeitkonstante führt. 1.4.3 Drehmoment und Spannungsinduktion Die Kraft die auf die Ankerwicklung in der Gleichstrommaschine wirkt ist gegeben durch 9 Abbildung 1.12: Maßnahmen zur Verkleinerung der Ankerzeitkonstante F = 2 · Ia · l · B (1.16) Das Drehmoment, das auf eine Ankerwicklung mit Windungszahl N und Radius r wirkt, ist dann M = 2·N ·F ·r = 2 · N · r · Ia · l · B Die Fläche des Luftspalts unter den Polschuhen ist Aδ = r · θp · l (1.17) θp ist der Winkel den die Polschuhe umfassen. Das Drehmoment ergibt sich somit zu Φe Aδ Φe = 2 · N · r · Ia · l · r · θp · l 2·N = · Ia · Φe θp M = 2 · N · r · Ia · l · wobei Φe der magnetische Fluss ist. Zur Vereinfachung wird das Drehmoment durch Gl. (1.18) berechnet (k1 ist die Maschinenkonstante). M = k1 · Ia · Φe [N · m] (1.18) Dreht sich der Rotor mit der Drehzahl ω[rad/s], wird eine Spannung im Ankerleiter induziert Ui (Leiter) = l · v · B 10 (1.19) Die induzierte Spannung Ea in einer Ankerwicklung mit Windungszahl N ist dann Ea = 2 · N · l · v · B Φe Aδ Φe = 2 · N · l · (r · ω) · r · θp · l 2·N · ω · Φe = θp = 2 · N · l · (r · ω) · Ea = k1 · Φe · ω 1.4.4 [V ] (1.20) 4-Polige Maschine Bei der in Abb. 1.8 dargestellten Gleichstrommaschine handelt sich um eine zwei polige Maschine (Polpaarzahl p = 1). Sollte die Maschine 4 oder mehr Pole haben (wie in Abb. 1.13 dargestellt), muss zwischen mechanischer Drehzahl ω und elektrischer Drehzahl ωelek unterschieden werden Abbildung 1.13: 4-Polige Gleichstrommaschine. welek = p · w (1.21) Gleichung (1.18) und (1.20) gelten noch, jedoch muss die Maschinenkonstante k1 mit p multipliziert werden. 1.4.5 Leistung und Verluste Abbildung 1.14 zeigt den Leistungsfluss durch einen Motor. Im motorischen Betrieb ist die elektrische Leistung die Eingangsleistung P1 , die mit Gleichung (1.22) berechnet wird, und die mechanische Leistung ist die verfügbare Leistung P2 , die mit Gleichung (1.23) berechnet wird. Elektrische Leistung Pelek = Ua · Ia 11 (1.22) Abbildung 1.14: Leistungsfluß durch einen Motor (Schröder, D. (2013). Elektrische Antriebe Grundlagen. Springer.). Mechanische Leistung Pmech = M · ω (1.23) Die elektrischen Verluste, auch Kupfer-(Stromwärme-)Verluste genannt, sind im Vergleich zu den anderen Verluste lastabhängig und werden mit Gleichung (1.24) berechnet PeV = Ra · Ia2 . Der Wirkungsgrad η = P2 P1 (1.24) wird dann im motorischen Betrieb mit Gleichung (1.25) berechnet η= Pmech . Pelek 12 (1.25) 2 2.1 Übungsaufgaben Aufgabe 1: Bewegter Leiter im Magnetfeld Ein Leiterstab mit der Länge l = 20 cm und Masse m = 50 g rutscht in einem Magnetfeld B = 2,5 T mit Geschwindigkeit v auf einer Rampe die einen Winkel α = 30◦ mit der Horizontalen einnimmt (Abb. 2.1). Abbildung 2.1: Leiterstab im Magnetfeld. (a) Erklären Sie warum ein Strom induziert wird und zeichnen Sie die Stromrichtung im elektrischen Kreis ein. (b) Berechnen Sie die induzierte Spannung Ui in Abhängigkeit von v. (c) Berechnen Sie die Lorentzkraft die auf den Leiterstab in Abhängigkeit von v wirkt wenn R = 10 Ω gilt und zeigen Sie die Richtung. (d) Mit welcher konstanten Geschwindigkeit v rutscht der Leiterstab? (Erdbeschleunigung g = 9, 81m/s2 ) 13 2.2 Aufgabe 2: Magnetischer Kreis Abb. 2.2 stellt einen halbierten Ringkern mit Innenradius ri = 10 cm, Außenradius ra = 12 cm und kreisförmiger Querschnittfläche dar. Ein Strom I = 2 A fließt durch die Spule mit Windungszahl N = 50. Ein Luftspalt mit Länge g = 5 mm trennt die zwei Hälften. Die relative Permeabilität des Kerns ist µr = 2 · 105 und die Permeabilität des Luftspalts ist µ0 = 4π · 10−7 H/m. Abbildung 2.2: Reluktanzkraft beim halbierten Ringkern. (a) Zeichnen Sie das Ersatzschaltbild des magnetischen Kreises. (b) Berechnen Sie die gesamte Reluktanz des Kreises (zur Vereinfachung wird das mag. Feld im Luftspalt als eine Gerade angenommen), den magnetischen Fluss und die magnetische Flussdichte im Kreis. (c) Welche Kraft entsteht im Luftspalt? (d) Eine Feder mit Konstante K = 25 N/m und entspannter Länge L0 = 20 mm wird im Luftspalt angebracht (Abb. 2.3). Berechnen Sie die Gleichgewichtslage g0 < 5 mm (die Wirkung der Feder auf das mag. Feld wird vernachlässigt). Abbildung 2.3: Reluktanzkraft beim halbierten Ringkern. 14 2.3 Aufgabe 3: Aufbau GSM (a) Beschreiben Sie den Zusammenhang zwischen der Ankerspannung, Ua , dem Ankerstrom, Ia und der Drehzahl ω einer fremderregten Gleichstrommaschine. Stellen Sie außerdem das elektrische Ersatzschatbild (ESB) des Ankerkreises dar. (b) Tragen Sie in das M −ω Diagramm in Abb. 2.4 die Kennlinie der Maschine. Die Kennlinie gibt die Drehzahl in Abhängigkeit vom Drehmoment an. Nehmen Sie einen konstanten Ankerstrom an. (c) Eine Reihenschlussmaschine ist (im Vergleich zur fremderregten Maschine) eine Gleichstrommaschine, in der der Erreger und der Anker in Serie geschaltet sind. Der Anker und der Erreger werden durch die gleiche Spannung versorgt. (i) Stellen Sie das elektrische ESB der Maschine dar. (ii) Beschreiben Sie den Zusammenhang zwischen Drehzahl und Ankerstrom, sowie Drehmoment und Ankerstrom im stationären Betrieb (Strom als konstant annehmen). (iii) Warum darf die Reihenschlussmaschine nicht ohne Last gestartet werden? Abbildung 2.4: M − ω Diagramm 15 Appendix: Physikalische Größen und Einheiten Größe Formel- Einheit Beziehung zeichen Name Zeichen Kraft F Newton N 1N=1 Energie W Joule J 1 J = 1 Ws = 1 Leistung P Watt W 1W=1 kg m2 J =1 s s3 Elektrische Spannung U Volt V 1V=1 kg m2 W =1 A A s3 Elektrischer Widerstand R Ohm Ω 1Ω=1 V kg m2 =1 2 3 A A s Elektrischer Leitwert G Siemens S 1S= Elektrische Ladung Q Coulomb C 1 C = 1 As Kapazität C Farad F 1F=1 Magnetischer Fluss Φ Weber Wb Magnetische Flussdichte B Tesla T 1T=1 kg Wb =1 2 m A s2 Induktivität L Henry H 1H=1 kg m2 Wb =1 2 2 A A s kg m s2 1 A A2 s3 =1 =1 Ω V kg m2 C A2 s4 =1 V kg m2 1 Wb = 1 Vs = 1 Tabelle 2.1: Physikalische Größen und Einheiten. 16 kg m2 s2 kg m2 A s2