Aufgabe 1
Werbung

Topologie – Serie 8 & 9
Olaf Merkert, 2. Mai 2011
Aufgabe 1
Lemma 1. Seien X, Y wegzusammenhängende topologische Räume. Dann gilt
Π1 (X × Y ) ≃ Π1 X × Π1 Y
Beweis. Das Produkt kommt mit zwei stetigen Projektionen p1 : X × Y → X, p2 :
X × Y → Y . Haben wir eine stetige Abbildung f : Z → X × Y , so bilden wir damit
stetige Abbildungen f1 = p1 ◦ f : Z → X und f2 = p2 ◦ f : Z → Y . Man erinnere: f ist
stetig genau wenn sowohl f1 als auch f2 stetig sind.
Umgekehrt, haben wir stetige Abbildungen f1 : Z → X und f2 : Z → Y , so können wir
eine stetige Abbildung f = (f1 , f2 ) : Z → X × Y definieren, durch f (z) = (f1 (z), f2 (z)),
mit der Eigenschaft f1 = p1 ◦ f und f2 = p2 ◦ f .
Nach diesen allgemeinen Überlegungen konstruieren wir die gesuchten Isomorphismen.
Dazu wählen wir x0 ∈ X, y0 ∈ Y und (x0 , y0 ) ∈ X × Y als Endpunkte der Schlaufen.
f : Π1 (X × Y ) → Π1 X × Π1 Y
g : Π1 X × Π1 Y → Π1 (X × Y )
[γ] 7→ ([p1 ◦ γ], [p2 ◦ γ])
([γ1 ], [γ2 ]) 7→ [(γ1 , γ2 )]
Diese Abbildungen sind wohldefiniert: Für eine Homotopie H rel{0, 1} zwischen α, β sind
H1 = p1 ◦ H rel{0, 1} resp. H2 = p2 ◦ H rel{0, 1} Homotopien zwischen p1 ◦ α und p1 ◦ β
resp. p2 ◦ α und p2 ◦ β. Für Homotopien H1 , H2 rel{0, 1} zwischen α1 , β1 sowie α2 , β2 ist
H = (H1 , H2 ) rel{0, 1} Homotopie zwischen (α1 , α2 ) und (β1 , β2 ).
Diese Abbildungen sind auch Gruppenhomomorphismen:
(
pi (α(2 t))
t ∈ 0, 12
= (pi ◦ α) ⋆ (pi ◦ β)(t)
pi ((α ⋆ β)(t)) =
pi (β(2 t − 1)) t ∈ 12 , 1
(
(α1 (2 t), α2 (2 t))
(α1 , α2 ) ⋆ (β1 , β2 )(t) =
(β1 (2 t − 1), β2 (2 t − 1))
t ∈ 0, 21
= (α1 ⋆ β1 , α2 ⋆ β2 )
t ∈ 12 , 1
Nach den anfänglichen Überlegungen ist auch schnell klar, dass f ◦ g = idΠ1 X×Π1 Y
und g ◦ f = idΠ1 (X×Y ) .
Korrolar 1. Sei X ein wegzusammenhängender topologischer Raum. Dann gilt
Π1 (X ×
Beweis. Π1
R) ≃ Π1 X
R ≃ {1}, also mit Lemma 1 folgt
Π1 (X × R) ≃ Π1 X × {1} ≃ Π1 X
1
Topologie – Serie 8 & 9
Olaf Merkert, 2. Mai 2011
Direkter Beweis. X ist eine Retraktion (als X × {0} sogar starker Deformationsretrakt)
von X × :
R
f :X →X×
R
g:X×
x 7→ (x, 0)
R→X
(x, t) 7→ x
Klar ist g ◦ f = idX und f ◦ g : (x, t) 7→ (x, 0) homotop zu idX×R via
H:X×
R × [0, 1] → X × R
(x, t, s) 7→ (x, s · t)
R
Damit sind X × und X homotopieäquivalente Räume, nach einem Korollar aus der
Vorlesung sind dann ihre Fundamentalgruppen isomorph.
Aufgabe 2
Behauptung 1. Für n ∈
N, n ≥ 2 ist S n einfach zusammenhängend.
Beweis. Wir wollen Aufgabe 3 von Blatt 7 benutzen. Da S n Hausdorff ist, so sind sowohl
U = S n \ N und V = S n \ S offene Teilmengen, wo N = (0, . . . , 0, +1) den Nord- und
S = (0, . . . , 0, −1) den Südpol bezeichnet. Klar ist U ∪ V = S n und klar auch U ∩ V 6= ∅,
solange n ≥ 1.
Durch die stetige Involution σ : S n → S n , (x0 , . . . , xn ) 7→ (x0 , . . . , xn−1 , −xn ), die
Spiegelung an der Hyperebene xn = 0, wissen wir, dass U und V homöomorph sind. Es
reicht also zu zeigen, dass U einfach zusammenhängend und U \ S = U ∩ V wegzusammenhängend ist.1
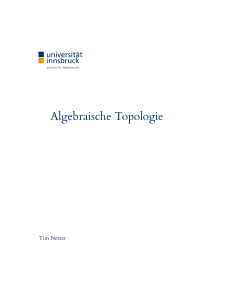
Dies geht über die stereographische Projektion, die S n \ N homöomorph auf n abbildet. Dazu denke n als Hyperebene E = {x ∈ n+1 | xn = h}, mit h 6= 1, hier h = 0.
Punkte von E und U stehen dann über die Geraden durch N , die E und U jeweils genau einmal treffen, in Bijektion. Wir werden diese Bijektion in Formeln fassen, um ihre
Stetigkeit (in beiden Richtungen) zu beweisen.
R
R
R
N
b
b
b
b
b
Abbildung 1: Stereographische Projektion in
1
Tatsächlich wird nur die letzte Bedingung im Fall n = 1 verletzt.
2
R2
Topologie – Serie 8 & 9
R
Olaf Merkert, 2. Mai 2011
Für ϕ : S n \ N → n sei also x ∈ S n , x 6= N . Wegen kxk2 = 1 gilt dann xn 6= 1. Die
Gerade durch x und N ist durch t ∈ , t x + (1 − t) N gegeben. Der Schnittpunkt mit
E findet sich durch
1
t xn + (1 − t) 1 = t (xn − 1) + 1 = 0 ⇐⇒ t =
1 − xn
R
1
(x0 , . . . , xn−1 ). Dies ist dank xn 6= 1 klar eine stetige Abbildung.
So definiere ϕ(x) = 1−x
n
n
n
Für ψ :
→ S \ N sei x = (x0 , . . . , xn−1 ) ∈ n . Setze x′ = (x0 , . . . , xn−1 , 0) ∈ E.
Die Gerade durch x′ und N sei wieder durch t ∈ , t x′ + (1 − t) N gegeben. Den
Schnittpunkt mit S n finden wir durch
2
1 = t x′ + (1 − t) N 2 = t2 kxk22 + (1 − t)2 ⇐⇒ t t(kxk22 + 1) − 2 = 0
R
R
R
2
t = 0 ergibt den Nordpol N , der uns hier nicht interessiert. Wir wollen t = 1+kxk
2 . Also
2
2
2
′ + 1−
x
N
.
Dies
ist
auch
offensichtlich
eine
stetige
definiere ψ(x) = 1+kxk
2
1+kxk22
2
Abbildung.
Durch Nachrechnen kann prüfen, dass die beiden Abbildungen zueinander invers sind,
wenn das nicht schon durch die geometrischen Randbedingungen ersichtlich sein sollte.
Damit sind U und V homöomorph zu n welches zusammenziehbar ist; also auch
einfach zusammenhängend.
Ferner ist offensichtlich ϕ(S) = 0, also U \ S homöomorph zu n \ 0. Solange n ≥ 2,
kann man sich leicht überzeugen, dass n \ 0 wegzusammenhängend ist. Für n = 1 ist
das aber nicht der Fall: \ 0 hat offensichtlich die Zusammenhangskomponenten >0
und <0 .
R
R
R
R
R
R
Aufgabe 6
Satz 1 (von Heine). Seien X, Y metrische Räume, X zudem kompakt und f : X → Y
eine stetige Abbildung. Dann ist f gleichmäßig stetig, d.h.
∀ε > 0 : ∃δ > 0 : ∀x, x′ ∈ X : d(x, x′ ) < δ ⇒ d(f (x), f (x′ )) < ε.
Beweis. Sei ε > 0. Setze ∀y ∈ Y : Vy = kε/2 (y), Uy = f −1 (Vy ). Da f stetig ist, ist
S
X = y∈Y Uy eine offene Überdeckung von X. Da X kompakt und metrisch ist, hat
diese Überdeckung eine Lebesguezahl δ > 0.
Seien nun x, x′ ∈ X mit d(x, x′ ) < δ. Dann ist diam{x, x′ } = d(x, x′ ) < δ, somit gibt
es y ∈ Y mit {x, x′ } ⊂ Uy , also f ({x, x′ }) ⊂ Vy = kε/2 (y). D.h.
d(f (x), f (x′ )) ≤ d(f (x), y) + d(y, f (x′ )) < ε/2 + ε/2 = ε
Bemerke, dass die Definition von gleichmäßig stetig nur Sinn macht, wenn X und
Y metrische Räume sind. Natürlich gibt es auf nicht kompakten metrischen Räumen
gleichmäßig stetige Abbildungen, z.B. die konstanten Abbildungen.
Für ein Beispiel einer stetigen Funktion, die jedoch nicht gleichmäßig stetig ist, siehe
Forster, Analysis I, §11, Gleichmäßige Stetigkeit, wo das Beispiel f :]0, 1] → , x 7→ x1
untersucht wird.
R
3