Technische Universität Ilmenau
Werbung

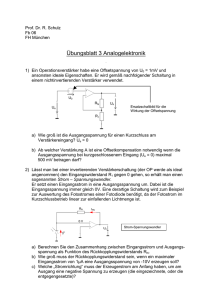
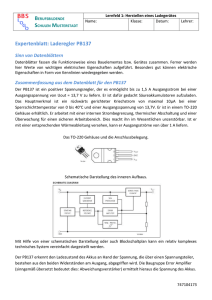
Technische Universität Ilmenau Fakultät für Elektrotechnik und Informationstechnik Praktikum zur Lehrveranstaltung Elektrische Energietechnik Lesender: Univ.-Prof. Dr.-Ing. Frank Berger, ET-Studenten (Bachelor 4. Fachsemester) Stand: März 2013 Versuchsnummer: EET 1 Institut: Elektrische Energie- und Steuerungstechnik Kurzthema: Prinzipien der Netzeinspeisung regenerativer Energien verantwortliches Fachgebiet: Leistungselektronik und Steuerungen Standort: Kirchhoff-Bau, Laborgebäude Elektrotechnik (Maschinenhalle ET) Raum 121 Tel.: 1529 (Zugang über Treppenhaus Kirchhoffbau, Telefon an der Tür) 1 Ziele des Versuches 2 Kennenlernen der Baugruppen zur Netzeinspeisung regenerativer Energien Erkennen des Grundprinzips der leistungselektronischen Energieumformung Kennenlernen von Schaltungsprinzipien leistungselektronischer Stellglieder Einsatz von Computertechnik für Datenkopplung und Datenauswertung Theoretische Grundlagen 2.1 Nutzung regenerativer Energien Die Lösung der Energieproblematik für zukünftige Generationen zwingt zur Nutzung aller Energieressourcen. Dazu bieten sich erneuerbare (regenerative) Energien besonders an. Zum breiten Einsatz muss das Problem der Verfügbarkeit gelöst werden. Da die Solar- und auch die Windenergie nicht kontinuierlich zur Verfügung stehen, ist entweder eine Speicherung der Energie notwendig, oder es muss direkt ins Elektroenergieversorgungsnetz eingespeist werden, wenn Energie bereit steht. Eine Speicherung ist mit Hilfe von Akkumulatoren möglich, die Anschaffungs- und Wartungskosten dazu und die Verluste durch die zweimalige Energiewandlung sind jedoch erheblich. Eine Speicherung ist auch durch Wasserstofferzeugung mit Hilfe eines Elektrolyseurs möglich. Zur Energieversorgung abgelegener Verbraucher (Inselsysteme, wie z. B. Wetterstationen oder einzeln stehende Höfe), die nicht an das Stromversorgungsnetz angeschlossen sind, ist die Nutzung von Wind-, Solaranlagen und Brennstoffzellen oft die einzige Möglichkeit. Ein Batteriespeicher ist dort immer vorhanden. Die effektivste Lösung zur Nutzung der Solar- und Windenergie ist die direkte Einspeisung ins Elektroenergienetz, weil damit jederzeit die gesamte zur Verfügung stehende Leistung ans Netz lieferbar ist. Eine Netzeinspeisung von Solarenergie ist nur möglich, wenn die zur Verfügung stehende Spannung größer als die Netzspannung ist und gleiche Frequenz und Phasenlage hat. Die Solarzellen (Solargeneratoren) haben jedoch eine Kennlinie, bei der der Strom stark von den Einstrahlungsverhältnissen und der Temperatur abhängig ist. Um einen möglichst hohen System1 EET 1 wirkungsgrad und geringe ohmsche Verluste zu haben, werden die einzelnen Solarzellen so miteinander verschaltet (Reihen- und Parallelschaltung), dass eine möglichst hohe Gleichspannung entsteht, aus der dann die Wechselspannung zur Netzeinspeisung mit Hilfe eines Pulsbreitenmodulators generiert wird. Diese Energiewandlungen müssen mit möglichst hohem Wirkungsgrad erfolgen, da beispielsweise die Solaranlage nur mit einem Wirkungsgrad von 10-12% arbeitet und nicht noch Energie durch Verluste verlorengeht. Dazu sind nur modernere Leistungshalbleiter in gepulsten leistungselektronischen Schaltungen in der Lage. Durch den Einsatz intelligenter Ansteuerautomaten ist es gleichzeitig möglich, durch die gezielte Beeinflussung der Stromform und der Phasenlage des ins Netz gespeisten Stromes bezüglich der Netzspannung eine Oberschwingungs- und Blindleistungskompensation zu realisieren. Zur Lösung dieser Aufgaben bietet die Leistungselektronik vielfältige Möglichkeiten, von denen eine im Versuch vorgestellt wird. 2.2 Aufgaben und Einsatzgebiete der Leistungselektronik Die Hauptaufgabe der Leistungselektronik besteht in der kontaktlosen, gesteuerten Umformung der Parameter der elektrischen Energie. Die Leistungselektronik vereint damit Teilgebiete der energieorientierten Elektrotechnik, der Elektronik und der Informationstechnik. Die Leistungselektronik ist somit das wichtigste Bindeglied zwischen Informationstechnik und den elektrischen Energiewandlern, die in technologische Prozesse eingebunden sind. Wesentliche Einsatzgebiete der Leistungselektronik sind: Elektrische Antriebe (Gleich- und Wechselstromantriebe) Elektrowärmetechnik, Galvanotechnik, Schweißtechnik Stromversorgungseinrichtungen, Schaltnetzteile Blindleistungskompensation Netzeinspeisung regenerativer Energien unterbrechungsfreie Stromversorgungen 2.3 Grundprinzipien der leistungselektronischen Energieumformung Die Abbildung 1 veranschaulicht die Wirkungsweise einer leistungselektronischen Einheit. Sie formt die Parameter der elektrischen Energie nach einer vorgegebenen Zeitfunktion um. Sie ist mit einer Steuereinheit verbunden, die diese Zielfunktion aus Mess-, Vorgabe- und Synchronisationsgrößen bildet. Die leistungselektronische Einheit arbeitet demzufolge wie ein Verstärker, der die Steuersignale in Ströme und Spannungen des gewünschten zeitlichen Verlaufes verstärkt. In der Vergangenheit wurde diese Verstärkerfunktion in vielen Fällen durch rotierende Umformer im oberen Leistungsbereich realisiert, wobei relativ niedrige Wirkungsgrade erreichbar waren. Die leistungselektronischen Bauelemente arbeiten verlustminimal im Schalterbetrieb. Das bedeutet, es gibt zwei stabile Arbeitspunkte: Schalter geschlossen (Leitzustand) Schalter geöffnet (Sperrzustand) und zwischen diesen beiden Zuständen als Übergänge den Ein- und Ausschaltvorgang. Nach diesem Prinzip arbeitende Schaltungen erreichen Wirkungsgrade von weit über 90%. 2 EET 1 mittlerer Leistungsfluß Netz Verbraucher LE Steuergrößen Meßgrößen Meßgrößen Steuereinheit Vorgabegrößen übergeordnetes Automatisierungssystem Abbildung 1 Wirkungsweise leistungselektronischer Baugruppen 3 Versuchsaufbau Die Gesamtschaltung der Versuchsanordnung ist auf Abbildung 11 angegeben. Ein Solargenerator dient als regenerative Energiequelle. Energiequelle kann ebenfalls ein Windgenerator, eine Pufferbatterie o.ä. sein. Die vom Solargenerator bereitgestellte Energie steht als Spannung am Puffergenerator bereit. Die Höhe dieser Spannung hängt in starkem Maße von den Einstrahlungsverhältnissen an den Solarzellen ab. Damit eine Einspeisung dieser Energie ins Netz möglich ist, muss eine konstante Gleichspannung erzeugt werden, die bei Einspeisung ins Einphasennetz ca. 350-400 V und bei Einspeisung ins Dreiphasennetz 700-800 V betragen muss. Diese konstante Gleichspannung ist mit einem Hochsetzsteller realisierbar, der je nach vorhandener Eingangsspannung (Spannung des Solargenerators) durch automatische Veränderung des Tastverhältnisses eine konstante Ausgangsspannung realisiert. An dieser konstanten Spannung UZ wird ein Pulswechselrichter betrieben, der eine pulsbreitenmodulierte Wechselspannung mit hoher Pulsfrequenz erzeugt. Ein auf die Pulsfrequenz abgestimmtes Filter vermindert die Stromoberschwingungen und verringert die Störabstrahlung des Wechselrichters. Die Grundfrequenz der Ausgangsspannung des Wechselrichters u L muss gleich der Netzfrequenz sein. Durch die Höhe dieser Spannung ist der ins Netz gespeiste Strom i L steuerbar. Die Phasenlage des eingespeisten Stromes bestimmt die Leistungsverhältnisse am Netzanschlusspunkt. Durch eine Veränderung der Phasenlage des Netzstromes bezüglich der Netzspannung ist eine Blindleistungskompensation möglich. 3.1 Hochsetzsteller L id i Tr uL ud D Tr u Tr i out i Last = const i uz R Last Abbildung 2 Schaltung Hochsetzsteller 3 EET 1 u Tr uz te ud ta t Tp Tr ein Tr aus t uL ud uz t id I max I min t i out t i Tr t Abbildung 3 Charakteristische Zeitverläufe im Hochsetzsteller Die Prinzipschaltung des Hochsetzstellers ist auf Abbildung 2 dargestellt. Eine Eingangsspannung Ud, die immer kleiner als die Ausgangsspannung Uz ist, kann z.B. durch einen Solargenerator bereitgestellt werden. Wird der Transistor Tr eingeschaltet, und damit die Induktivität L an die Spannung ud angeschlossen, steigt der Strom id annähernd linear an. Die Spannung am Transistor ist Null und die Diode D sperrt. Wird der Transistor ausgeschaltet, fließt der Strom id aufgrund der in der Induktivität gespeicherten Energie weiter und die Diode D wird leitend. Der Strom id fließt in die Spannungsquelle Uz und lädt den Kondensator auf. Dabei sinkt der Strom durch die Induktivität ab. Der Transistor wird mit der Spannung Uz belastet. Der Mittelwert der Spannung an der Induktivität muss über eine Pulsperiode gleich Null sein, wenn ein stationärer Zustand vorliegt. Für nichtlückenden Strom id gilt demzufolge: U d t e U d U z t a 0 3.1 Werden beide Terme durch Tp dividiert, ergibt sich die Steuerkennlinie des Hochsetzstellers. U z Tp 1 Ud t a 1 - vT 3.2 mit 4 EET 1 vT te Tp 3.3 Der Zusammenhang ist in Abbildung 4 dargestellt. Bei großen Tastverhältnissen steigt die Ausgangsspannung sehr stark an, was zur spannungsmäßigen Überlastung des Ausgangskondensators und der Diode führt und damit zur Zerstörung der Bauelemente. Deshalb ist entweder eine Regelung des Tastverhältnisses notwendig oder das Tastverhältnis wird auf einen oberen Wert begrenzt. Im vorliegenden Fall ist eine obere Grenze bei 0,79 eingestellt. Damit ist das Verhältnis von Ausgangsspannung zur Eingangsspannung nicht größer als 5. Die Welligkeit des Stromes id hängt von der Größe der Induktivität L sowie von der Pulsfrequenz fp = 1/Tp ab. Der zeitliche Verlauf der Ströme durch den Transistor i Tr und durch die Diode iout ist in Abbildung 3 ebenfalls dargestellt. Daraus ist ersichtlich, dass bei kleinen Tastverhältnissen hauptsächlich die Diode den Strom führt, während bei großen Tastverhältnissen hauptsächlich der Transistor leitend ist. Abbildung 4 Steuerkennlinie des Hochsetzstellers 3.2 Wechselrichter Den Stromlaufplan des realisierten Leistungsteils zeigt die Abbildung 5. Abbildung 5 Schaltung des Wechselrichters 5 EET 1 Die an den Eingangsklemmen bereitgestellte Zwischenkreisspannung U z wird durch die beiden Zwischenkreiskondensatoren C1 und C2 geglättet. Sie kann z. B. durch eine geeignete Gleichspannungsquelle bereitgestellt (Gleichrichter, Akkumulator o.ä.) oder auch durch einen vorgeschalteten Hoch- bzw. Tiefsetzsteller erzeugt werden. Der Mittelpunkt der Spannung Uz ist herausgeführt und wird zum Anschluss der Belastung benutzt. Damit entsteht eine Mittelpunktschaltung. Abbildung 6 Der eigentliche Wechselrichter besteht aus den IGBT-Transitorschaltern T1 und T2 mit den integrierten antiparallelen Dioden D1 und D2. An den Ausgangsklemmen des Wechselrichters ist über ein Filter, bestehend aus LF und CF eine ohmsch-induktive Last (R, L) angeschlossen. Die Wechselrichterausgangsspannung wird sowohl vor dem Filter (uwr), als auch nach dem Filter (uL) gemessen. Die prinzipiellen zeitlichen Verläufe bei einer alternierenden Betriebsweise verdeutlicht Abbildung 7. Wird z. B. der Schalter T2 aus- und gleichzeitig T1 eingeschaltet, und der Laststrom iL war vorher negativ, dann kann nur die Diode D1 den noch negativen Laststrom führen, da der Transistor T2 bereits gesperrt ist. Dies geschieht solange, bis der Laststrom seine Polarität wechselt und der Strom von D1 auf T1 kommutiert (übergeht). Dann führt T1 solange den Strom, bis er ausgeschaltet wird und gleichzeitig T2 einschaltet. Der erneute Stromwechsel von iL erfolgt in gleicher Weise. Die dargestellten Zeitverläufe ergeben sich für gleiche Einschaltzeiten für beide Transistoren. 6 EET 1 Abbildung 7 prinzipielle Zeitverläufe im Wechselrichter Der Anstieg des Laststromes ist von der Pulsfrequenz und von der Lastzeitkonstante (L/R) abhängig. Durch unterschiedliche Einschaltzeiten der Transistoren T1 und T2 ist es theoretisch möglich, jeden beliebigen zeitlichen Verlauf des Laststromes zu modulieren, vorausgesetzt die Taktfrequenz fT ist ausreichend hoch. Die Leitdauer der Transistoren wird durch das Tastverhältnis vT von einem übergeordneten Ansteuerautomaten (hier ein Microcontroller) vorgegeben und hängt von der gewünschten Ausgangsspannung, der gewünschten Grundfrequenz und dem Modulatiosverfahren (Betriebsart) ab. Die Taktfrequenz fT = 1/T beträgt für die vorliegende Schaltung maximal 25 kHz. Die Frequenz des Referenzwertes fG entspricht der Ausgangsfrequenz und beträgt für Netzstrom 50 Hz. 3.3 Modulationsverfahren Die Modulation der Ansteuersignale und damit der Ausgangsspannung erfolgt nach dem in Abbildung 8 gezeigten Prinzip. Abbildung 8 Bildung der Ansteuersignale Der Referenzwert stellt den zu realisierenden Stromverlauf dar. Der aktuelle Zählerstand eines digitalen Zählers wird mit einem Referenzwert verglichen und bei Gleichheit der Transistor T 2 eingeschaltet, während zum gleichen Zeitpunkt T1 ausgeschaltet wird. Die Ausgangsspannung des Stromrichters Ud wird zu diesem Zeitpunkt negativ und der Laststrom sinkt ab. Beim Überlauf des Zählers erfolgt die Umschaltung so, dass die Ausgangsspannung wieder positiv wird und damit der Strom wieder ansteigt. Damit stellt sich ein welliger Ausgangsstrom ein, dessen zeitlicher Verlauf von den Lastparametern und vom Verlauf des Referenzwertes abhängig ist. Wird der Referenzwert sinusförmig verändert, stellt sich auch ein sinusförmiger Laststrom ein. Die Welligkeit des Laststromes ist umso kleiner, je größer das Verhältnis von Pulsfrequenz (Schaltfrequenz der Transistoren) zur Grundfrequenz (Frequenz der Grundschwingung des Ausgangsstromes) und je größer die Induktivität im Lastkreis ist. 7 EET 1 Für die Sägezahnmodulation verändert sich der Referenzwert sägezahnförmig, wobei die Amplitude mit dem Parameter amp eingestellt wird. Für zwei mögliche Modulationsarten sind die zeitlichen Verläufe der Referenzwerte in Abbildung 9 dargestellt. Abbildung 9 zeitlicher Verlauf des Referenzwertes 3.4 Steuersystem Das Blockschaltbild der Steuerung für den Stromrichter zeigt die Abbildung 10. Als ein Hauptbestandteil ist ein Steuersystem in Form eines Personal-Computers vorhanden, der über einen seriellen Kanal die Verbindung mit dem Ansteuerautomaten bildet. Der Ansteuerautomat, bestehend aus einem 8bit-Microcontroller und einer stromrichternahen Steuerung, die z.B. eine programmierbare Logik sein kann, realisiert die Verbindung zum Prozess. Die durch den Ansteuerautomaten bereitgestellten Ansteuerimpulse werden über eine Potentialtrennstelle, die entweder mit einem Übertrager oder mittels Optokoppler ausgeführt sein kann, zu den Ansteuerbausteinen geführt. Diese bilden dann die notwendige Gate-Emitter-Spannung für die IGBTLeistungshalbleiter, damit diese sicher und mit möglichst wenig Verlusten ein- und ausschalten. Im einfachsten Fall besteht der Ansteuerautomat nur aus einem Microcontroller oder einer entsprechenden Analogschaltung. Im vorliegenden Fall wird mit dem Ansteuerautomaten eine Pulsbreitenmodulation realisiert, mit der sowohl eine sinusförmige Modulation der Ausgangsspannung des Wechselrichters, als auch eine Sägezahn- und Rechteckmodulation wahlweise einstellbar sind. Die Vorgabe der durch den Ansteuerautomaten zu realisierenden Parameter erfolgt durch das PC-Steuersystem. Das PCSteuersystem ist für den Betrieb des Ansteuerautomaten nicht zwingend erforderlich. Durch die Analogwertaufbereitung der Meßwerte für den Ansteuerautomaten ist ein eigenständiger Betrieb möglich. Die Verbindung zum PC-Steuersystem ist für die Entwicklungs- und Inbetriebnahmephase günstig und gestattet insbesondere während der Systementwicklung und -untersuchung eine effektive Arbeit. 8 EET 1 Abbildung 10 Blockschaltbild Stromrichtersteuerung 9 EET 1 3.5 Kommunikation zwischen PC und Microcontroller (Ansteuerautomat) Mit einem Kommunikationsprogramm „kom51“ ist es möglich, dem Ansteuerautomaten vom PC aus Parameter vorzugeben. Dazu gehören: Pulsfrequenz des Wechselrichters, über den Parameter „pulsfre“ einstellbar pulsfre = 10 pulsfre = 1 Pulsfrequenz 10 kHz Pulsfrequenz 1 kHz Amplitude der Ausgangsspannung uL, über den Parameter „amp“ einstellbar amp = 0ffh amp = 0 Amplitude maximal Amplitude gleich Null Grundfrequenz der Ausgangsspannung, über den Parameter „fre“ einstellbar Modulationsverfahren über den Parameter „mode“ einstellbar mode = 1 mode = 2 mode = 3 Sinusmodulation Sägezahnmodulation Rechteckmodulation Die notwendigen Parameter werden mit der Tastatur vorgegeben. Über den Rückmeldekanal vom Ansteuerautomaten können sowohl die aktuelle Einstellung von Parametern als auch die aktuellen Werte von im Microcontroller vorhandenen Variablen auf dem PC kontrolliert und gegebenenfalls geändert werden. Damit ist eine gezielte Beeinflussung der Ansteuerung vom PC aus möglich, was insbesondere bei der Inbetriebnahme von neuen Programmen bzw. Verfahren vorteilhaft ist. Aufgabenstellung 4 Versuchsdurchführung 4.1 Hochsetzsteller Schließen Sie an den Eingang des Hochsetzstellers die Spannungsquelle an und wählen Sie die Spannung Ud mit dem Drehschalter aus. Es sind folgende Messungen durchzuführen: 1. Aufnahme der Steuerkennlinie Uz f(v T ) Ud mit vT te und Ud = 25V, 50V Tp 2. Aufnahme der Kennlinie vT = f(ILast) für konstante Ausgangsspannung Uz = 150 V und Eingangsspannung Ud = 50 V und 100 V. 3. Der Parameter ILast ist in folgenden Schritten (1 A; 1,5 A; 2 A; 2,5 A; 3 A) einzustellen und zeitgleich in den Arbeitspunkten der Eingangsstrom zu notieren. 4. Diskutieren Sie die aufgenommenen Kennlinien. Berechnen Sie aus den Messwerten von 2. den Wirkungsgrad. 5. Wie ist die Steuerung des Hochsetzstellers zu realisieren, wenn am Eingang ein Solarfeld angeschlossen wird, dessen Spannung zwischen 150 V und 300 V schwankt, am Ausgang des Hochsetzstellers aber eine konstante Spannung von 360 V gehalten werden muss, um einen Wechselrichter zu speisen? 10 EET 1 4.2 Wechselrichter Zur Inbetriebnahme des Wechselrichters sind folgende Aktivitäten notwendig: Laden des Steuerprogrammes vom PC in den Microcontroller Starten des Steuerprogrammes Anschließen der Spannungsquelle an den Wechselrichter Einstellen der erforderlichen Eingangsspannung UZ an der Spannungsquelle (UZ = 150 V) Es sind folgende Messungen durchzuführen: Sinusmodulation: Pulsfrequenz 10 kHz: Oszillografieren Sie die zeitlichen Verläufe von Lastspannung u L und Laststrom iL, sowie die Ausgangsspannung des Wechselrichters uWR ohne Filterkondensator CF. Grundfrequenz 50 Hz; Sinusmodulation Schalten Sie im gleichen Arbeitspunkt den Filterkondensator zu. Pulsfrequenz 1 kHz: Oszillografieren Sie die zeitlichen Verläufe von Lastspannung u L und Laststrom iL, sowie die Ausgangsspannung des Wechselrichters uWR ohne Filterkondensator CF. Grundfrequenz 50 Hz; Sinusmodulation Diskutieren Sie den Verlauf des Laststromes. Was verändert sich bei Verringerung der Pulsfrequenz? Sägezahnmodulation Oszillografieren Sie die zeitlichen Verläufe von Lastspannung und Laststrom iL ohne Filterkondensator. Grundfrequenz 50 Hz; Pulsfrequenz 10 kHz Diskutieren Sie die Messergebnisse. Welche Veränderungen stellen Sie gegenüber der Sinusmodulation fest? Rechteckmodulation Oszillografieren Sie die zeitlichen Verläufe von Lastspannung und Laststrom i L ohne Filterkondensator. Grundfrequenz 50 Hz; Pulsfrequenz 10 kHz Diskutieren Sie die Messergebnisse. Welche Veränderungen stellen Sie gegenüber der Sinusmodulation fest? 11 EET 1 Abbildung 11 Gesamtschaltung der Versuchsanordnung 5 Vorbereitung und Literaturhinweise 5.1 Vorbereitung Zur Vorbereitung auf die Versuchsdurchführung setzen Sie sich mit der Funktionsweise der Grundschaltungen auseinander. Eine schriftliche Vorbereitung oder Ausarbeitung wird für diesen Versuch nicht erwartet. 5.2 Literaturhinweise Die frei verfügbare webbasierte Lernplattform iPES (Interactive Power Electronics Seminar) wird von der ETH Zürich bereitgestellt. Interactive Power Electronics Seminar (iPES) www.ipes.ethz.ch (Aufruf am 27.03.2013) - (Java notwendig) 12 EET 1