Lösungen ¨Ubung 12 - Institut für Mathematik
Werbung

Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Lösungen Übung 12
2 −1
−5
Aufgabe 1.
a) Die Darstellungsmatrix ist
. Das Bild von P ist
.
1 1
2
3 0
−3
b) Die Darstellungsmatrix ist
. Das Bild von P ist
.
0 3
9
0 −1
−3
c) Die Darstellungsmatrix ist
. Das Bild von P ist
.
2 1
1
v1
Aufgabe 2. Der Kern von A ist die Menge aller Vektoren ~v =
so, dass A~v = 0. Diese
v2
Matrixgleichung ist äquivalent zum Gleichungssystem
(
2v1 + 6v2 = 0,
4v1 + 12v2 = 0.
1 3
. Die zwei obenstehenden Gleichungen
0 0
sind also äquivalent zu einander und zur Gleichung
Die reduzierte Dreiecksstufenform von A ist
v1 + 3v2 = 0.
Die Variable v2 ist frei wählbar, und wenn wir
v2 = t ∈ R
setzen, so erhalten wir
v1 = −3t.
Der Kern ist also
−3
Kern(A) = t
1
(t ∈ R).
Sei ~v ein Vektor im Bild der Matrix A. Es gibt also r, s ∈ R so, dass
6
2
r
.
~v = A
=r
+s
12
4
s
Mit t = 2r + 6s können wir ~v auch als
1
1
1
1
~v = 2r
+ 6s
= (2r + 6s)
=t
2
2
2
2
1
r
1
schreiben. Umgekehrt ist jeder Vektor der Form t
im Bild von A, da A
=t
ist,
2
s
2
r
t/2
wenn wir zum Beispiel
=
wählen. Es gilt also
s
0
1 Bild(A) = t
t∈R .
2 HS12
1/9
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
Die Matrix B ist invertierbar mit Inverse
B −1
J. Schönenberger-Deuel
1/2 1/2
=
. Wir haben die Äquivalenzen
−1
0
B~v = ~0 ⇐⇒ ~v = B −1~0 ⇐⇒ ~v = ~0.
Hieraus folgt, dass Kern(B) = {~0} ist.
Des Weiteren haben wir die Äquivalenz
B~v = w
~ ⇐⇒ ~v = B −1 w.
~
Das bedeutet, dass für jeden Vektor w
~ ∈ R2 genau ein Vektor ~v existiert, der B~v = w
~ erfüllt,
−1
nämlich ~v = B w.
~ Hieraus folgt, dass Bild(B) = R2 ist.
Aufgabe 3.
a) Rotation um 45◦ (um den Nullpunkt): Die Darstellungsmatrix ist (Seite
125 im Skript)
√ 1√
1
2
−
cos 45◦ − sin 45◦
2
2
√2 .
A=
= 1√
◦
◦
1
sin 45
cos 45
2 2
2 2
Die inverse Abbildung ist die Rotation um −45◦ ; ihre Darstellungsmatrix ist
√ 1√
1
2
−1
2 √
2 √2 .
A =
− 21 2 12 2
b) Spiegelung
der Geraden y = x: Diese Abbildung vertauscht die Einheitsvektoren
an
0
1
. Die Darstellungsmatrix ist also
und
1
0
0 1
.
B=
1 0
Die inverse Abbildung ist gleich der ursprünglichen Abbildung; ihre Darstellungsmatrix
ist
0 1
−1
.
B =B=
1 0
c) Scherung entlang der x-Achse um 45◦ : Die Darstellungsmatrix ist (Seite 127 im Skript)
1 tan 45◦
1 1
C=
=
.
0
1
0 1
Die inverse Abbildung ist die Scherung entlang der x-Achse um −45◦ ; ihre Darstellungsmatrix ist
1 −1
−1
C =
.
0 1
d) Orthogonalprojektion auf die Gerade y = x: Die Darstellungsmatrix ist
1/2 1/2
D=
.
1/2 1/2
Diese Abbildung ist nicht invertierbar.
HS12
2/9
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Aufgabe 4. Für die Matrix A berechnen wir
1−λ
2
det(A − λE) = det
= (1 − λ)(2 − λ).
0
2−λ
Die Eigenwerte sind also
λ1 = 1
und λ2 = 2.
Um die Eigenvektoren zum Eigenwert λi zu finden, müssen wir den Kern von A − λi E bestimmen. Es gilt
0 2
A − λ1 E =
.
0 1
1
Der Kern dieser Matrix enthält den Vektor
; ein Eigenvektor von A zum Eigenwert λ1 = 1
0
1
ist also ~v1 =
. Es gilt
0
−1 2
A − λ2 E =
.
0 0
2
; ein Eigenvektor von A zum Eigenwert λ2 = 2
Der Kern dieser Matrix enthält den Vektor
1
2
.
ist also ~v2 =
1
Kontrolle:
4
2
1
1
= λ2~v2 .
=
= λ1~v1 , A~v2 = A
=
A~v1 = A
2
1
0
0
Für die Matrix B berechnen wir
1 − λ −2
det(B − λE) = det
= (1 − λ)(−λ) − 4 = λ2 − λ − 4.
−2 −λ
Die Diskriminante der quadratischen Gleichung λ2 − λ − 4 = 0 ist (−1)2 − 4 · 1 · (−4) = 17,
und die Eigenwerte sind
√
√
1 + 17
1 − 17
λ1 =
und λ2 =
.
2
2
Es gilt
B − λ1 E =
√
1− 17
2
−2
√
−1− 17
2
−2
2√
!
.
!
Der Kern dieser Matrix enthält den Vektor 1− 17 ; ein Eigenvektor von A zum Eigen2
!
√
2
wert λ1 = 1+2 17 ist also ~v1 = 1−√17 . Eine ähnliche Berechnung gibt: Ein Eigenvektor
2
!
√
2
von A zum Eigenwert λ2 = 1−2 17 ist ~v2 = 1+√17 .
2
HS12
3/9
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
Kontrolle:
B~v1 = B
2√
!
1− 17
2
=
√
√ 1 + 17
1 + 17
=
−2
2
J. Schönenberger-Deuel
2√
1− 17
2
!
= λ1~v1
und ähnlich für λ2 .
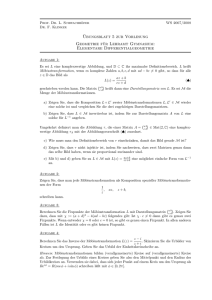
Aufgabe 5.
a) Zustandsübergangsdiagramm (R = Regen, S = schönes Wetter):
b) Übergangsmatrix:
0.4 0.2
.
A=
0.6 0.8
c) Wir suchen den stationären Zustand. Wir berechnen zuerst
−0.6 0.2
.
A−E =
0.6 −0.2
1
mit t ∈ R. Das bedeutet, dass
Der Kern dieser Matrix besteht aus den Vektoren t
3
es drei mal so viele Tage gibt, an denen es schön ist, als Tage, an denen es regnet.
Prozentual bedeutet dass, das es an 25% der Tage regnet und es an den übrigen 75%
der Tage schön ist.
Aufgabe 6.
a) Wir berechnen
1−λ
0.2
det(A − λE) = det
0
0.8 − λ
= (1 − λ)(0.8 − λ).
Das ist genau dann gleich Null, wenn λ = 1 oder λ = 0.8 ist; die Eigenwerte sind also 1
und 0.8.
Die stationären Zustände sind die Lösungsvektoren ~v des Systems (A − E)~v = ~0, oder
0 0.2
v1
0
=
.
0 −0.2
v2
0
Hieraus folgt, dass v2 = 0 ist und dass v1 frei wählbar ist. Die stationären Zustände
sind also
t
~v =
, t ∈ R.
0
HS12
4/9
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Eine ähnliche Berechnunggibt
für B die Eigenwerte λ1 = 1 und λ2 = −0.8, und
5t
die stationären Zustände
, t ∈ R. Für C finden wir die Eigenwerte λ1 = 1 und
4t
t
λ2 = 0.25 (wobei λ2 die Multiplizität 2 hat), und die stationären Zustände t, t ∈ R.
t
1
b)
i) Bei (a) haben wir den Eigenvektor ~v1 =
zum Eigenwert λ1 = 1 gefunden. Die
0
Eigenvektoren zum Eigenwert λ2 = 0.8 sind die Vektoren (ungleich Null) im Kern
der Matrix
0.2 0.2
A − λ2 E =
.
0
0
1
Hieraus folgt, dass ~v2 =
ein Eigenvektor von A zum Eigenwert λ2 = 0.8 ist.
−1
Wir nehmen also
1 1
,
P = (~v1 ~v2 ) =
0 −1
1 0
λ1 0
.
=
D=
0 0.8
0 λ2
Eine Berechnung gibt
AP = P D = λ1~v1
λ2~v2
1 0.8
.
=
0 0.8
Das Resultat gilt allgemein: Sei P eine Matrix, in der die i-te Spalte ein Eigenvektor
~vi zu einem Eigenwert λi von A ist. Dann ist sowohl in der Matrix AP als in der
Matrix P D die i-te Spalte gleich λi~vi . Hieraus folgt, dass AP = P D ist.
ii) Aus AP = P D folgt durch Multiplikation von rechts mit P −1 , dass A = P DP −1
ist. Wir schreiben das Produkt An = (P DP −1 )n um als
An = P DP −1 P DP −1 P DP −1 · · · P DP −1
= P DDD · · · DP −1
= P Dn P −1 .
Weil D eine Diagonalmatrix ist, gilt
n n
1 0
1
0
1
0
n
D =
=
=
.
0 0.8
0 (0.8)n
0 (0.8)n
Auch gilt
P
HS12
−1
1 1
=
0 −1
5/9
(= P ).
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Wir finden also
An = P Dn P −1
1 1
1
0
1 1
=
0 −1
0 (0.8)n
0 −1
1 1
1
1
=
0 −1
0 −(0.8)n
1 1 − (0.8)n
=
.
0
(0.8)n
Weil |0.8| < 1 ist, konvergiert (0.8)n für n → ∞ gegen Null. Der Grenzwert von
An ist daher
1 1 − limn→∞ (0.8)n
1 1
n
lim A =
=
.
n→∞
0
limn→∞ (0.8)n
0 0
x
Für jeden Vektor ~v =
gilt
y
x + (1 − (0.8)n )y
lim (A ~v ) = lim
n→∞
n→∞
(0.8)n y
x + limn→∞ (1 − (0.8)n )y
=
limn→∞ (0.8)n y
x+y
=
0
n
= ( lim An )~v .
n→∞
Aufgabe 7.
a) Die Darstellungsmatrix der Rotation um 90◦ bezüglich der y-Achse ist
0 0 1
cos 90◦ 0 sin 90◦
0
1
0 = 0 1 0 .
Ry,90◦ =
◦
− sin 90 0 cos 90◦
−1 0 1
Die Darstellungsmatrix der Projektion auf die Aufrissebene (yz-Ebene) ist
0 1 0
Pyz =
.
0 0 1
Die Matrix der zusammengesetzten Abbildung ist
0 1 0
M = Pyz Ry,90◦ =
.
−1 0 0
Die Bilder der Punkte sind
A B C D E F G H S R U
y −1 1 1 −1 −1 1 1 −1 0 0 0
z −1 −1 1 1 −1 −1 1 1 0 0 0
HS12
6/9
T
1
2
0
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Zeichnung:
b) Die Darstellungsmatrix der Rotation um 45◦ bezüglich der x-Achse ist
1
0
0
1
0
0
√
√
Rx,45◦ = 0 cos 45◦ sin 45◦ = 0 12 √2 12 √2 .
0 − sin 45◦ cos 45◦
0 − 12 2 12 2
Die Darstellungsmatrix der Rotation um 30◦ bezüglich der
1√
cos 30◦ 0 sin 30◦
2 3
0
1
0 = 0
Ry,30◦ =
− sin 30◦ 0 cos 30◦
− 12
y-Achse ist
1
0
2
1
0 .
√
1
0 2 3
Die Darstellungsmatrix der zusammengesetzten Abbildung ist
N = Pyz Ry,30◦ Rx,45◦
√
1
1 3 0
1
0
2
2
√
0 1 0
0 1 2
0
1
0
=
2 √
√
0 0 1
− 12 0 12 3
0 − 12 2
1
0
0
√
√
0 1
0
0 1 2 1 2
√
=
1
1
2
2
√
√
−2 0 2 3
0 − 12 2 12 2
√
√ 1
1
0
2
2 √
2 √2
=
− 12 − 14 6 41 6
0.000
0.707 0.707
≈
.
−0.500 −0.612 0.612
0
√
1
2 √2
1
2 2
Die Bilder der Punkte sind
A
√
y − 2
z − 12
HS12
B
0√
−1− 6
2
C
0√
1− 6
2
D
√
− 2
1
2
E
0√
−1+ 6
2
F √
G
√
2
2
1
1
−2 2
7/9
H
0√
1+ 6
2
S
√
2
√
1
2 6
R
√
7
6 √2
7
12 6
U
√
4
3 √2
2
3 6
T
√
3
2 √2
1
2 6
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
Zeichnung:
Aufgabe 8.
a) Die PageRank-Matrix ist
0 0
12 0
1
2 0
0 1
P =
0 0
0 0
0 0
0 0
0
0
1
2
1
3
0
0
0
0
1
2
1
3
1
3
0
0
0
0
0
0
0
0
0
0
1
3
1
3
1
3
0
0
0
0
0
0
0
1
1
3
0
0
0
0
0
0
.
0
1
2
1
1
3
0
0
0
0
1
3
2
Da P eine stochastische Matrix ist, besitzt sie einen Eigenvektor zum Eigenwert 1. Wir
bestimmen den Kern der Matrix P − E mit dem Gauss-Algorithmus und finden den
Eigenvektor
0.0600
24
27 0.0675
12 0.0300
0.0675
1
27
.
=
~v =
400
39 0.0975
81 0.2025
72 0.1800
0.2950
118
Dieser Eigenvektor ist bis auf Multiplikation
mit einem Skalar eindeutig bestimmt; wir
P
haben ihn so normalisiert, dass 8i=1 vi = 1 ist.
Die Seiten werden also wie folgt rangiert:
(Seite 8) > (Seite 6) > (Seite 7) > (Seite 5) > (Seiten 2 und 4) > (Seite 1) > (Seite 3).
HS12
8/9
18. Dezember 2012
Institut für Mathematik
Geometrie und Lineare Algebra
J. Schönenberger-Deuel
b) Die (nicht-modifizierte) PageRank-Matrix P ist
0 1 0 0 0
1 0 0 0 0
1
P =
0 0 0 1 21 .
0 0 1 0
2
0 0 0 0 0
Sei S die 5 × 5-Matrix, in der alle Elemente gleich 1/5 sind. Die modifizierte PageRankMatrix mit α = 0.85 ist
G = 0.85P + 0.15S
0.03 0.88 0.03 0.03
0.88 0.03 0.03 0.03
=
0.03 0.03 0.03 0.88
0.03 0.03 0.88 0.03
0.03 0.03 0.03 0.03
3
22
3
3
3
100
22
25
3
=
100
3
100
3
100
25
3
100
3
100
3
100
3
100
100
3
100
3
100
22
25
3
100
100
3
100
22
25
3
100
3
100
0.03
0.03
0.455
0.455
0.03
100
3
100
91
200 .
91
200
3
100
Wir bestimmen den KernPder Matrix G − E mit dem Gauss-Algorithmus und finden
(mit der Normalisierung 5i=1 vi = 1)
0.200
0.200
.
0.285
~v =
0.285
0.030
Die Seiten werden also wie folgt rangiert:
(Seiten 3 und 4) > (Seiten 1 und 2) > Seite 5.
Bemerkung: In diesem Fall lässt die nicht-modifizierte PageRank-Matrix P nicht nur
einen Eigenvektor (bis auf Multiplikation mit einem Skalar), sondern unendlich viele
Eigenvektoren zum Eigenwert 1 zu. Das bedeutet, dass wir die modifizierte Matrix G
brauchen, um ein eindeutiges Ranking zu erhalten.
HS12
9/9
18. Dezember 2012