Nr. 5 Trägheitsmoment , Direktionsmoment Teil A
Werbung

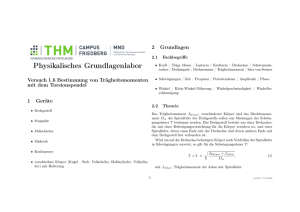
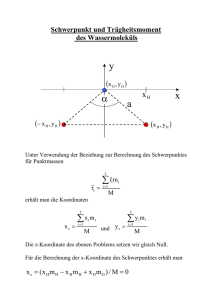
KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 5 Trägheitsmoment , Direktionsmoment Teil A Das Trägheitsmoment von Körpern und das Direktionsmoment von Torsionsdrähten ist mithilfe eines Drehpendels zu bestimmen. Frei schwingende Scheibe Torsionsdraht Fixierte Scheibe 1. Notwendiges Basiswissen Grundlagen der Schwingungslehre: Freie Schwingung, freie gedämpfte Schwingung, Unterschied zw. linearer Schwingung und Drehschwingung. Aufstellen der Schwingungsdifferentialgleichung für harmonische Schwingungen und Lösung derselben. Kenntnis der Begriffe: Schwingungsdauer, Frequenz, Kreisfrequenz, Eigenfrequenz, Kennfrequenz, Trägheitsmoment, Hook´sches Gesetz, Torsion, Steiner´scher Satz. 2. Aufgabenstellung a) Das Direktionsmoment des Torsionsdrahtes und das Trägheitsmoment der Drehscheibe sind aus der Schwingungsdauer des Drehpendels mithilfe zusätzlicher definierter Trägheitsmomente zu bestimmen. b) Die Hauptträgheitsmomente eines Stahlquaders sind mithilfe des Drehpendels zu bestimmen. c) Verifiziere den Satz von Steiner Vorgangsweise ad a) Durch Anstoßen der Drehscheibe wird diese in Schwingung gebracht. Diese Schwingung kann mithilfe des Speicheroszilloskopes dargestellt und in den Computer zum Ausdrucken übertragen werden. Vorher ist in der Ruhestellung durch Betätigung der Reset Taste der D/A Wandler zurückzustellen. Die Schwingungsdauer tP kann direkt am Oszilloskop und/oder am entsprechend kalibrierten Ausdruck bestimmt werden. Nun werden zusätzliche Gewichte an der Drehscheibe befestigt, deren Erhöhung des Gesamtträgheitsmomentes bekannt sind. Die nun geänderte Schwingungsdauer tP' ist in gleicher Weise zu bestimmen. Unter Vernachlässigung der Dämpfung (man sollte hier mit möglichst ungedämpften P. Knoll. Trägheitsmoment, Direktionsmoment 1 KFUG, Inst. f. Experimentalphysik, ad b) ad c) Laborübungen aus Experimentalphysik I Schwingungen arbeiten) kann durch Auftragen von (tP'/2π)2 gegen die verschiedenen zusätzlichen Trägheitsmomente I´ (dabei ist auch jene Schwingung ohne zusätzlichem Trägheitsmoment mit I´ = 0 gemeint) durch einen linearen Fit Direktionsmoment und Trägheitsmoment der Drehscheibe gleichzeitig bestimmt werden. Beim Quader liegen die Hauptträgheitsmomente bezüglich der Hauptachsen (Drehachsen höchster Symmetrie) des Quaders. Durch Montage des Quaders an der Drehachse des Drehpendels mit einer seiner Hauptachsen, kann die Erhöhung des Trägheitsmomentes aus der Schwingungsdauer bei bekanntem Direktionsmoment bestimmt werden. Durch Abzug des Trägheitsmomentes der Drehscheibe (Addition der Trägheitsmomente bei gleicher Drehachse) kann das Hauptträgheitsmoment bestimmt werden. In gleicher Weise kann auch jedes unbekannte Trägheitsmoment bezüglich der gewählten Drehachse bestimmt werden. Ein Körper (z.B. Kreisscheibe) mit bekanntem Trägheitsmoment bezüglich seines Mittelpunktes wird im Abstand a von der Drehachse der Drehscheibe auf dieser direkt montiert. Das Gesamtträgheitsmoment ergibt sich aus dem Steiner´schen Satz und kann über die Periodendauer der Drehschwingung und der Kenntnis des Direktionsmomentes des Torsionsdrahtes verifiziert werden. 3. ad a) Zur Auswertung notwendige Zusammenhänge ad b) I ges = I + I ´ ad c) I ges = I + I ´+ M ´a 2 Dr I + I´ ω= − γ 2 , t P ´≈ 2 π Dr I 2 t ´ 1 1 , P ≈ I+ I´ Dr Dr 2π P. Knoll. Trägheitsmoment, Direktionsmoment 2 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 5 Trägheitsmoment , Direktionsmoment 4. 4.1. Teil B Beschreibung des Geräts Geräteliste 1. Drehpendel mit eingebautem Drehwinkelsensoren (Lichtschranken) (1,2 in der Abbildung). 2. Steuergerät mit D/A Wandler und Ausgang für das Oszilloskop (3 in der Abbildung). 3. Speicheroszilloskop Hameg HM 205-2 mit IEEE Computerschnittstelle (5 in der Abbildung). 4. BNC-Kabel (1 St). 5. PC mit IEEE Schnittstelle mit Oszilloskop verbunden, zur Datenerfassung, Auswertung und Darstellung (Ausdruck). In einem Rahmengestell (a) befinden sich 2 in vertikaler Achse gelagerte Aluminiumscheiben (b,c). Die untere Scheibe (b) ist fixiert. Die obere Scheibe (c) ist mit dem Torsionsdraht (e) an die fixierte Scheibe mechanisch gekoppelt. Seitlich im Rahmen befindet sich jeweils ein Drehwinkelsensor (g), von denen nur der der oberen Scheibe (c) gebraucht wird. Der Versuch wird ohne Wirbelstrombremse (h) durchgeführt. Werkzeug für Umbauten und zusätzliche Gewichte für die Drehscheibe befinden sich in der Ablage (i). 2 1 5 h g a c 4 f e 3 6 d g b P. Knoll. Trägheitsmoment, Direktionsmoment i 3 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I 4.2. Detailbeschreibungen Drehwinkelsensoren: Jede der Scheiben enthält an ihrem Umfang eine Verzahnung mit 180 Zähnen (und ebenso vielen Lücken). Dreht sich die Scheibe, liefert eine drehrichtungserkennende Lichtschranke entsprechende Impulse, die in einem Zähler hinaufbzw. hinuntergezählt werden. Der Zählerstand wird mittels D/A-Wandler in ein winkelproportionales, analoges Spannungssignal umgewandelt (+/-12V pro +/-180 Grad). Mittels der Taste „Clear“ am Bediengerät kann der Zähler bei jeder beliebigen Drehstellung auf null gesetzt werden, sinnvollerweise erfolgt dies in der Ruhelage des Pendels um Sättigungseffekte zu vermeiden. (systematischer Fehler?). Das Analogsignal steht am Ausgang „B“ des Steuergerätes für die frei schwingende Scheibe zur Verfügung und kann zwecks Beobachtung und Registrierung einem Oszilloskop zugeführt werden (siehe linkes Bild). Zusätzliche Gewichte: In der Werkzeugablage sind zusätzliche Gewichte vorhanden, welche mit dem beiliegenden Imbusschlüssel und den Senkkopfschrauben an der Drehscheibe montiert werden können. Dabei entspricht die Form des monierten Zusatzgewichtes (1 oder 2) einem Hohlzylindersegment, wodurch aus der bestimmten Masse und den bestimmten Abständen von der Drehachse (Radien) das zusätzliche Trägheitsmoment berechnet werden kann. Weitere Gewichte können ebenfalls mit den Senkkopfschrauben montiert werden; das wirkende Trägheitsmoment ist mithilfe des Steiner´schen Satzes zu ermitteln. Körper mit unbekanntem Trägheitsmoment können auch direkt auf der Drehachse montiert werden. 5. Besondere Hinweise zum Umgang mit dem Gerät, Sicherheitshinweise Vor Beginn der Arbeit ist das Gerät entsprechend der Abbildung auf- bzw. umzubauen: Abbau nicht benötigter Teile, Einbau des richtigen Torsionsdrahtes. Auf möglichst reibungsfreie Drehbarkeit der Scheibe ist zu achten. Axiale Kräfte rufen vergrößerte Lagerreibung hervor, daher darf der Torsionsdraht nicht gespannt sein (vom Betreuer überprüfen lassen)! Vorsicht! Beim Hantieren mit den Torsionsdrähten besteht Verletzungsgefahr! P. Knoll. Trägheitsmoment, Direktionsmoment 4 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Nr. 5 Trägheitsmoment, Direktionsmoment 6. • • • • 7. • • • • • • • • 8. Teil C Literatur W. Demtröder, Experimentalphysik I, Kapitel 10. Berkeley Physik Kurs 3, Schwingungen und Wellen, Kapitel 3 Eichler/Kronfeld/Sahm, Das neue physikalische Praktikum, Kapitel 7 W. Walcher, Praktikum der Physik, Kapitel 7. Kontrollfragen Wie kann das Trägheitsmoment eines Körpers experimentell ermittelt werden? Wie kann das Trägheitsmoment eines Körpers berechnet werden? Wie lautet der Ansatz der Differentialgleichung für die freie Drehschwingung? Wie könnte man das Experiment unter Berücksichtigung der Dämpfung auswerten? Unter welchen Bedingungen können Trägheitsmomente von Körpern einfach addiert werden? Wann muss der Steiner´sche Satz angewendet werden? Was sind die Hauptträgheitsmomente eines Körpers und wie können sie bestimmt werden? Welche Einheiten haben Trägheitsmoment und Direktionsmoment? Grundlagen 8.1 Mechanik rotierender starrer Körper r r Wir gehen von dem Gesetz F = M&x& aus, welches aus den Newton'schen Axiomen gewonnen r r wurde. Für mehrere Massepunkte lässt es sich erweitern zu: ∑ Fi − M&x&i = 0 . Rotationen sind i nun dadurch charakterisiert, dass dabei alle Punkte auf einer Geraden, der Drehachse, unverändert bleiben. Wir wählen nun einen Punkt auf der Drehachse als Bezugspunkt und r betrachten für alle i Massepunkte den Ortsvektor ri bezüglich dieses Bezugspunktes. Wir r erweitern die letzte Gleichung indem wir mit den Vektoren ri von links das Vektorprodukt r r r r r r r r r r r bilden und erhalten: r × F − M &x& = 0 = r × F − r × M &x& = r × F − r × p& . Dabei ∑ i ( i i i i ) ∑ i i i i i i ∑ i i i i i r r r r r r wird die Größe Ti = ri × Fi das Drehmoment und li = ri × pi der Drehimpuls des i-ten Massepunktes genannt. Damit haben wir bereits eine Formulierung des Newton'schen r& r Gesetzes für Rotationen gefunden: ∑ Ti = ∑ li . Weiters ist es zweckmäßig bei Rotationen i i anstelle der Ortskoordinate eine Winkelkoordinate einzuführen, welche entsprechend des Drehsinnes (Rechtssystem) ebenfalls ein Vektor ist. Für eine infinitesimale Verschiebung r r r r gilt: dx = dϕ × r + dr . Für Winkelgeschwindigkeit und Winkelbeschleunigung des i-ten r r r r r r r r r r r r r r r Massepunktes erhält man: vi = x& i = ϕ& i × ri + r&i = ω i × ri + r&i und bi = &x&i = ω& i × ri + ω i × r&i + &r&i . Damit kann man auf reine Winkelgrößen transformieren und erhält für den Drehimpuls: r r r r r r r r r r tr li = ri × pi = ri × M i vi = M i ri × ω i × ri + M i ri × r&i = I iω i + 0 . Dabei wurde aus dem etwas P. Knoll. Trägheitsmoment, Direktionsmoment 5 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I komplizierten Ausdruck mit dem doppelten Kreuzprodukt der Vektor der Winkelgeschwindigkeit herausgezogen, wofür ein Tensor 2. Stufe eingeführt werden musste. Dieser Tensor wird Trägheitsmoment genannt und kann durch komponentenweisen Vergleich bestimmt werden: ri 2,y + ri 2,z t I i = M i − ri , x ri , y −r r i,x i ,z − ri , x ri , y r +r − ri , y ri , z 2 i,x 2 i ,z − ri , x ri ,z − ri , y ri , z . ri 2,x + ri 2,y Dieser Tensor des Trägheitsmomentes ist symmetrisch und ein wichtiges Hilfsmittel bei der Beschreibung von Drehbewegungen. Wir betrachten nun wiederum die eigentliche Bewegungsgleichung und transformieren den Term mit der Drehimpulsänderung ebenfalls r& r r r r r r t r t& r r r auf Winkelgrößen: l = r × M &x& = r × M ω& × r + r × M ω × r& = I ω& + I ω . Damit erhalten i i i i i i i i i i i i i i i wir bereits die Bewegungsgleichung ausgedrückt in Winkelgrößen: ( ) ( ) r r& r t r t& r r t r t& r r r r r 0 = ∑ ri × Fi − ri × p& i = ∑ Ti − li = ∑ Ti − I iω& i − I ω i = ∑ Ti − I iϕ&&i − I ϕ& i . i i i i Wichtig ist zu betonen, dass bis jetzt nur mathematische Umformungen auf Winkeländerungen durchgeführt wurden, und daher auch in dieser Form beliebige Bewegungen beschrieben werden können. Dabei ist die Wahl des Bezugspunktes auf der Drehachse nicht unbedingt notwendig. Von Vorteil ist diese Art der Beschreibung allerdings bei reinen Rotationen, da dann alle Massepunkte die gleiche Winkelgeschwindigkeit besitzen. Wählt man dann den Bezugspunkt auf der Drehachse und betrachtet Drehungen um den Schwerpunkt, dann werden die Gleichungen besonders einfach und auch der Tensor des Trägheitsmomentes wird während dieser reinen Rotation eine recht einfach zu berechnende konstante Größe. Interpretieren wir die Änderung des Drehimpulses ebenfalls als Drehmoment, so erhält man noch folgende Gleichung: r ∑T = 0. j j Diese letzten beiden Gleichungen stellen die Newton'schen Axiome in Winkelgrößen dar. Damit lässt sich jedes mechanische Problem genauso in Winkelgrößen lösen. Für reine Rotationen, wo alle Massepunkte die gleiche Winkelgeschwindigkeit besitzen, vereinfachen sie sich zu: ( ) r tr r r t r tr r tr 0 = ∑ Ti − I iϕ&&i = ∑ Ti − ϕ&&∑ I i = T − I ϕ&& = T − I ω& = 0 . i i i Dabei kann bezogen auf eine Achse ein Gesamtträgheitsmoment des Körpers angegeben werden, welches konstant ist. 8.2 Trägheitsmomente einfacher Körper Bei der Beschreibung von Bewegungen mit Hilfe von Winkelgrößen spielt das Trägheitsmoment eine entscheidende Hilfe. Als Tensor 2. Stufe kann er durch geeignete Wahl der Achsen auf reine Diagonalform gebracht werden (Hauptachsenform). Dies ist bei P. Knoll. Trägheitsmoment, Direktionsmoment 6 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I einfachen Körpern für Achsen durch den Massenschwerpunkt, welche gleichzeitig Symmetriehauptachsen sind, der Fall. Dann berechnen sich die 3 Trägheitsmomente ganz einfach als die Summe über alle Massenpunkte multipliziert mit dem Quadrat des kürzesten Abstandes zu der jeweiligen Drehachse. Aus diesen Hauptträgheitsmomenten IH einfacher Körper lassen sich dann die Trägheitsmomente beliebiger Körper bezüglich beliebiger Achsen IB mithilfe folgender Gesetzmäßigkeiten ermitteln: (1) Transformation von Hauptachsen auf beliebige Achsen durch den Schwerpunkt mit tt t t Hilfe einer orthogonalen Transformation: I B = OI H O −1 . (2) Berechnung des Trägheitsmomentes Ia für Achsen außerhalb des Schwerpunktes aus dem Trägheitsmoment I bezüglich des Schwerpunktes mit Hilfe des Satzes von Steiner. Ist a der Abstand des Schwerpunktes von der Drehachse und M die Gesamtmasse des Körpers so ist I a = I + Ma 2 . (3) Zusammensetzung der Trägheitsmomente komplizierter Körper aus einfachen Körpern mithilfe der Addition von Trägheitsmomenten bezüglich der gleichen Drehachse. 8.2.1 Kugel Wir gehen von einer homogenen Kugel aus mit konstanter Dichte innerhalb des Kugelradius R. Am zweckmäßigsten werden Kugelkoordinaten r, ϕ, ϑ verwendet, welche durch x=rcosϕsinϑ, y=rsinϕsinϑ und z=rcosϑ definiert sind. Das infinitesimale Volumselement dV lautet dann in Kugelkoordinaten: dV=r2sinϑdrdϕdϑ. Die Masse der Kugel ergibt sich zu: R 2π π M = ∫ ρdV = ∫ 0 V r3 ∫0 ∫0 ρr sin ϑdrdϕdϑ = ρ 3 R 2 4πR 3 = ρV . 2 ⋅ 2π = ρ 3 3 (− cosϑ ) π0 ϕ 02π = ρ R 0 3 Das Trägheitsmoment bezüglich einer Achse durch den Mittelpunkt (Schwerpunkt) kann leicht mit Hilfe des Abstandsquadrates a2 eines infinitesimalen Massepunktes von der Drehachse berechnet werden. Wir wählen die Drehachse in z-Richtung und erhalten: I zz = ∫ ρa dV = ∫ ρ (r sin ϑ ) dV = ∫ V =ρ 5 R 5 R R 2π π 2 2 V 0 π 1 r5 2π ρ ϑ ϕ ϑ ρ sin r drd d = − cosϑ + cos3 ϑ ϕ 0 = ∫0 ∫0 5 0 3 0 4 3 2 8πR 2 2 4πR 3 2 2 π ρ 2 ⋅ 2 = = = R M R ρ − 3 5 5 3 5 5 Daraus lassen sich auch die Trägheitsmomente komplizierterer kugelförmiger Körper berechnen. Die Hohlkugel, welche nur Masse zwischen den Radien R1 < R2 aufweist ergibt sich zu: I 1, 2 ( ) 8π R2 − R1 = I 2 − I1 = ρ , 15 5 5 ganz analog zur Masse: M 1, 2 = M 2 − M 1 = ( ) 4π 3 3 R2 − R1 . 3 P. Knoll. Trägheitsmoment, Direktionsmoment 7 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I 8.2.2 Hohlzylindersegment Für die Beschreibung eines Zylinders werden zweckmäßigerweise Zylinderkoordinaten r, ϕ und z verwendet. Ein infinitesimales Volumselement ergibt sich dann zu: dV=rdrdϕdz. Wir wollen ein Zylindersegment betrachten, dass zwischen den Radien R1 < R2 und zwischen den Winkeln α1 und α2 über die Dicke d homogen mit der Dichte ρ ausgefüllt ist. Die Masse des Hohlzylindersegmentes ergibt sich zu: R2 α 2 d r2 M = ∫ ∫ ∫ ρrdrdϕdz = ρ 2 R1 α1 0 R2 α2 d ϕα z0 = 1 R1 ( ) dρ 2 2 R2 − R1 (α 2 − α1 ) . 2 Für das Trägheitsmoment bezüglich der z-Achse erhält man: R2 α 2 d r4 I zz = ∫ ∫ ∫ r ρrdrdϕdz = ρ 4 R1 α1 0 R2 ( d 1 R1 ) ( 2 ) dρ 4 4 R2 − R1 (α 2 − α1 ) = 4 R2 + R1 dρ R + R1 2 2 R2 − R1 (α 2 − α1 ) = M 2 2 2 2 2 = α2 ϕα z0 = 2 2 2 8.3 Beispiel: Rotierender Massepunkt Als einfaches Beispiel betrachten wir einen mit konstanter Winkelgeschwindigkeit ω im festen Abstand r zur Drehachse rotierenden Punkt mit der Masse M. Zunächst behandeln wir das Problem im herkömmlichen kartesischen Koordinatensystem und den darauf formulierten Newton'schen Gesetzen. Die rotierende Bewegung soll in der x-y-Ebene stattfinden und wir erhalten für Ortsvektor, Geschwindigkeit und Beschleunigung: − rω 2 cos ωt r cos ωt − rω sin ωt r r r x = r sin ωt , v = rω cos ωt und b = − rω 2 sin ωt . 0 0 0 Aus den Newton'schen Axiomen folgt ein Kraftvektor, welcher für die Beschleunigung verantwortlich sein muss: − rω 2 cos ωt F r r x F = Fy = Mb = M − rω 2 sin ωt . F 0 z Diese Kraft ist auf die Drehachse gerichtet und wird von der starren Verbindung des Massepunktes zur Drehachse aufgenommen. Sie wird Zentripedalkraft genannt. Der Betrag r der Kraft ist F = F = Mrω 2 . Die entsprechend gegengesetzte Kraft ist die Trägheitskraft und weist vom Drehmittelpunkt weg, ist gleich groß und ist die allgemein bekannte Fliehkraft. Diese auftretenden Kräfte, die nicht a priori vorgegeben wurden und erst zwanghaft entstanden sind um einen bestimmten Bewegungsvorgang (Rotation) zu ermöglichen, werden Zwangskräfte genannt. Eine weitere Zwangskraft, die Corioliskraft, tritt bei diesem einfachen Problem nicht auf, weil der Abstand zur Drehachse konstant ist. Wichtig ist anzumerken, dass der Ortsvektor zwar den augenblicklichen Ort des Massepunktes beschreibt, aber sein Betrag nicht dem zurückgelegten Weg entspricht. Diesen P. Knoll. Trägheitsmoment, Direktionsmoment 8 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I erhalten wir als Integration über den Betrag der Geschwindigkeit: t s (t ) = ∫ 0 t r v (t ) dt = ∫ 0 t r ω sin ωt + r ω cos ωt dt = ∫ rωdt = rωt . 2 2 2 2 2 2 0 Die Integrationskonstante wurde hier mit Null angenommen (abhängig von den Randbedingungen). In gleicher Weise lässt sich dieses Problem mit Hilfe der vorhin abgeleiteten Gesetze für Winkeländerungen beschreiben. Der Massepunkt rotiert mit konstanter Winkelgeschwindigkeit und man erhält: I T r x t v xx T = T y = I ω& = I xy I T z xz I xy I yy I yz I xz 0 I yz 0 . I zz ω& = 0 Demnach handelt es sich um eine drehmomentfreie gleichförmige Rotation in Analogie zur kräftefreien gleichförmigen linearen Bewegung. Hier sieht man bereits den Vorteil der Verwendung der Gleichungen in Winkelgrößen, da die Beschreibung wesentlich einfacher ist. Allerdings nur solange, als man nur in dem Verhalten der makroskopischen Drehbewegungen interessiert ist. Zwangskräfte, wie z.B. die Fliehkraft sind hier nicht explizit ersichtlich. Etwas tieferen Einblick erhält man noch, wenn nun die einzelnen Drehgrößen wie Drehmomente, Drehimpulse und Trägheitsmomente auch tatsächlich ausgerechnet werden. In unserem Fall der einfachen Rotation in einer Ebene sind nur die zKomponenten von Bedeutung. Wir berechnen: − rω 2 cos ωt 0 r cos ωt r v r 2 0 T = r × F = r sin ωt × M − rω sin ωt = M 2 2 2 2 0 0 − r ω cos ωt sin ωt + r ω sin ωt cos ωt = 0 , ry2 + rz2 t I = M − rx ry −r r x z − rx ry rx2 + rz2 − ry rz r 2 sin 2 ωt − r 2 sin ωt cos ωt 0 − rx rz 0 . r 2 cos 2 ωt − ry rz = M − r 2 sin ωt cos ωt rx2 + ry2 0 0 r 2 Der Trägheitstensor besteht nur aus der zz-Komponente als zeitlich stabile Größe, während die anderen Komponenten nur zeitweise auftreten und für den Bewegungsvorgang im Mittel nicht maßgebend sind. Das Trägheitsmoment eines einzelnen Massepunktes ist daher Mr2, wobei r den Normalabstand zur Drehachse bedeutet. Die Kreisfrequenz hat nur eine zKomponente, da nur der Winkel des Massepunktes in der x-y-Ebene sich ändert: 0 ω = 0 , mit ϕ = ωt + ϕ 0 . ω = ϕ& r Die weiteren Größen ergeben sich zu: P. Knoll. Trägheitsmoment, Direktionsmoment 9 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I r cos ωt − rω sin ωt 0 r r r r tr r l = r × p = r × Mv = r sin ωt × M rω cos ωt = M 0 = I ω . 0 r 2ω 0 Zur Vereinfachung ist in nachstehender Tabelle nochmals die Analogie zwischen den einzelnen Größen angegeben: lineare Bewegung r x , Ort r r v = x& , Geschwindigkeit r r b = &x& , Beschleunigung r F , Kraft M , Masse Rotation ϕ , Winkel r r ω = ϕ& , r Winkelgeschwindigkeit r ϕ&& , Winkelbeschleunigung r T , Drehmoment r r r T =r×F t r r r tr I , Trägheitsmoment Mr × ω × r = I ω ry2 + rz2 − rx ry − rx rz 2 2 M − rx ry rx + rz − ry rz −r r − ry rz rx2 + ry2 x z r p , Impuls bzw. in einfachen Systemen 2 wo I diagonal: I αα = M rα r l , Drehimpuls r r r F = Mb = p& r r& t& r t r T = l = I ω + I ω& r F ∑ i =0 r T ∑ i =0 i Zusammenhang r r r r dx = dϕ × r + dr r r r r v = ω × r + r& , r r r r r r b = ω& × r + ω × r& + &r& r r r r r l = r × p = r × Mv = r r tr r = r × Mω × r = I ω i 8.4 einfache Drehschwingung Eine einfache praktische Realisierung einer harmonischen Schwingung kann durch eine Drehschwingung einer Metallscheibe verwirklicht werden. Die periodische veränderliche Größe ist der Drehwinkel ϕ der Metallscheibe um eine vorgegebene Achse. Dies ist möglich, wenn auf den Körper ein Drehmoment T wirkt, das eine Funktion des Drehwinkels ist. Der Wert des Winkels ϕ, bei dem T gleich null wird, heißt in Analogie zur linearen Schwingung Ruhelage. Das Drehmoment ist jeweils so gerichtet, dass der Körper gegen die Ruhelage hin beschleunigt wird. Für die Winkelbeschleunigung gilt dann ϕ&& = T I worin I das Trägheitsmoment des Körpers in Bezug auf die Drehachse ist. P. Knoll. Trägheitsmoment, Direktionsmoment 10 KFUG, Inst. f. Experimentalphysik, Laborübungen aus Experimentalphysik I Wird eine Masse über einen Torsionsdraht um einen Winkel verdreht, so besteht ein Zusammenhangs zwischen Drehwinkel und Drehmoment in Analogie zum Hook´schen Gesetz: T = − D rϕ . Der Proportionalitätsfaktor Dr heißt das Direktionsmoment. Dieser lineare Zusammenhang zwischen Winkel und Drehmoment ist häufig eine gute Näherung der wirklichen Verhältnisse, da jede beliebige Auslenkung um die Ruhelage in eine Potenzreihe entwickelt und für genügend kleine Winkel nach dem ersten Glied abgebrochen werden kann. Wird das rücktreibende Drehmoment durch Verdrillung eines Drahtes der Länge l und des Radiuses r bewirkt, so gilt für das Direktionsmoment: Dr = πr 4 G 2l . Dabei ist G der Torsionsmodul, welcher durch das Material des Drahtes bestimmt wird. Die Bewegungsgleichung erhalten wir wiederum aus dem Newton´schen Axiom, dass die Summe aller Kräfte verschwinden muss: Iϕ&& + TR + DRϕ = 0 = Iϕ&& + g ϕ& + Drϕ . Dabei wurde noch zusätzlich ein Drehmoment der Reibung Winkelgeschwindigkeit hinzugefügt. Nach Division durch I erhält man: proportional zur ϕ&& + 2 γ ϕ& + ω 02 ϕ = 0 mit: D g = 2 γ und r = ω 02 . I I γ heißt die Dämpfungskonstante des schwingenden Systems. Die Lösung erhält man durch den Ansatz: ϕ (t ) = Ae iωt . Die Eigenfrequenz ergibt sich dabei als komplexe Zahl mit ω = iγ ± ω 0 2 − γ 2 . ϕ (t ) = Re Ae −γt e it Die ( allgemeine Lösung lautet daher: ) = Re Ae −γt e iω0 (γ ) t . Durch die Dämpfung wird daher einerseits die Amplitude exponentiell abklingen, und andererseits die Schwingungsdauer zu: tP = 2π Dr g2 − 2 I 4I = ω 0 2 −γ 2 2π ω02 − γ 2 vergrößert. Für kleine Dämpfungen kann man meist unter Vernachlässigung von γ die Periodendauer interpretierten. Es gilt: P. Knoll. Trägheitsmoment, Direktionsmoment 11 KFUG, Inst. f. Experimentalphysik, tP ≈ 2 π Laborübungen aus Experimentalphysik I I Dr Mittels der angegebenen Beziehung kann das Direktionsmoment oder das Trägheitsmoment bestimmt werden, wenn die Schwingungsdauer und die jeweils andere Größe bekannt sind. Das Direktionsmoment kann im Prinzip auch direkt ermittelt werden, wenn zu einem bekannten von außen angelegten Drehmoment die Winkelauslenkung gemessen wird. Häufig ist dies aus messtechnischen Gründen nicht möglich. Auch die direkte Ermittlung des Trägheitsmomentes ist bei beliebig geformten Körpern schwierig. Um beide Größen aus reinen Messungen der Schwingungsdauer zu ermitteln, kann man das Trägheitsmoment I des Körpers um einen definierten Wert I' verändern und die dadurch geänderte Schwingungsdauer tP' bestimmen. Noch genauere Ergebnisse erhält man, wenn man das Trägheitsmoment in mehreren Schritten um definierte Werte erhöht und dann durch geeignete Auftragung von Periodendauer und zusätzlichem Trägheitsmoment mit Hilfe einer Ausgleichsgeraden gleichzeitig unbekanntes ursprüngliches Trägheitsmoment und Direktionsmoment bestimmt. Das Trägheitsmoment erhöht sich dabei mit Iges= I + I'. Daraus ergibt sich eine geänderte Periodendauer: t P ( I ´) = 2π I + I' . Dr Durch Quadrieren erhält man einen linearen Zusammenhang: 2 t P ( I ´) = 4π 2 I 4π 2 I ' + . Dr Dr Trägt man nun in einem Diagramm tP2(I´) als y-Wert und I´ als x-Wert auf, so kann man aus der ermittelten Ausgleichsgeraden Dr und I bestimmen. Ebenso kann man auch die Dämpfung der Schwingung berücksichtigen. Unter Verwendung der Kreisfrequenz ω und der Dämpfungskonstanten γ erhält man: 1 I I' = + . 2 ω + γ I ´ Dr Dr 2 I´ 9. Experimentpate: P. Knoll P. Knoll. Trägheitsmoment, Direktionsmoment 12