Torsionspendel
Werbung

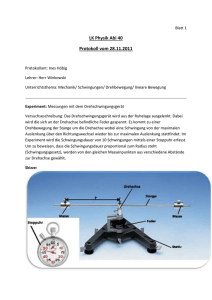
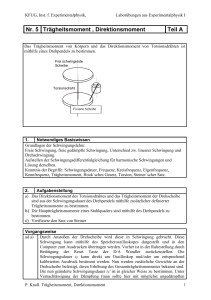
2 Grundlagen 2.1 Physikalisches Grundlagenlabor • Kraft / Träge Masse / Lastarm / Kraftarm / Drehachse / Schwerpunktachse / Drehimpuls / Drehmoment / Trägheitsmoment / Satz von Steiner • Schwingungen / Zeit / Frequenz / Periodendauer / Amplitude / Phase Versuch 1.6 Bestimmung von Trägheitsmomenten mit dem Torsionspendel 1 Fachbegriffe • Winkel / Klein-Winkel-Näherung / Winkelgeschwindigkeit / Winkelbeschleunigung Geräte 2.2 Theorie • Drehgestell Das Trägheitsmoment JK örper verschiedener Körper und das Direktionsmoment Dm der Spiralfeder des Drehgestells sollen aus Messungen der Schwingungsdauer T bestimmt werden. Das Drehgestell besteht aus einer Drehachse, die mit einer Befestigungsvorrichtung für die Körper versehen ist, und einer Spiralfeder, deren eines Ende mit der Drehachse und deren anderes Ende mit dem Drehgestell fest verbunden ist. Wird ein auf der Drehachse befestigter Körper nach Verdrillen der Spiralfeder in Schwingungen versetzt, so gilt für die Schwingungsdauer T : • Stoppuhr • Meßschieber • Maßstab • Kraftmesser r T =2·π· • verschiedene Körper (Kugel , Stab, Vollscheibe, Hohlzylinder, Vollzylinder) mit Halterung JK örper + JAchse , Dm (1) mit JAchse : Trägheitsmoment der Achse mit Spiralfeder. 1 erstellt: 7.10.2016 2.3 Bestimmung des Direktionsmomentes Dm der Feder 3 und des Trägheitsmoments JAchse 1. Vor Versuchsbeginn ist die Drehachse mit Hilfe der Fußschrauben und der Libelle senkrecht auszurichten, warum? Außerdem ist zu beachten, daß die maximale Auslenkung der Feder 180◦ nicht überschreitet. Aus Messungen der Schwingungsdauer eines Stabes wird das Direktionsmomentes Dm der Feder und des Trägheitsmoments der Achse JAchse bestimmt. Für das Trägheitsmoment in der Mitte eingespannten symmetrischsen Stabes der Länge l und der Masse m gilt: JStab (x = 0) = 1 · m · l2 12 2. Bestimmung von Dm und JAchse : Zur Bestimmung des Direktionsmoments der Spiralfeder und dem Massenträgheitsmoment der Achse wird die Periondeauer T in Abhängigkeit unterschiedlicher Einspannpositionen bestimmt. Die geometrische Mitte des Stabes soll hierbei Bezugspunkt sein. Tragen Sie T 2 als Funktion von x2 auf und ermitteln Sie das Direktionsmoment aus der Steigung, sowie das Massenträgheitsmoment der Achse JAchse aus dem Achsenabschnitt der Regressionsgeraden. (2) Wird der Stab an einer Position x bezüglich der Stabmitte eingespannt, so ergibt sich für sein Massenträgheitsmoment mit dem Satz von Steiner: 1 JStab (x) = · m · l 2 + m · x2 12 Zusätzlich wird eine statische Messung durchgeführt. Dazu ist das Direktionsmoment aus Messungen des Drehmoments für 12 verschiedene Hebelarme r mit dem Auslenkwinkel ϕ = − π2 zu ermitteln. Auch hier ist die Auswertung über die Berechnung einer Ausgleichsgeraden durchzuführen (Hinweis: die Kraft F ist eine Funktion von 1r ) (3) Mit Hilfe der Gleichung (1) für die Schwingungsdauer kann sowohl das Richtmoment der Feder Dm als auch das Masseträgheitsmoment der Achse JAchse berechnet werden. 2.4 Aufgabe 3. Bestimmung der Trägheitsmomente J verschiedener Körper Zur Bestimmung der Trägheitsmomente J der verschiedenen Körper sind je 5 Messungen der Schwingungsdauern durchzuführen. Für die Auswertung wird das mit dem kleinsten Fehler bestimmte Direktionsmoment Dm benutzt. Bestimmung des Direktionsmoments Dm aus Messungen des Drehmoments M 4. Auswertung: Berechnen Sie die Trägheitsmomente der Körper aufgrund ihrer Geometrie aus Messungen ihrer Massen und Abmessungen. Vergleichen Sie die berechneten Massenträgheitsmomente mit den über die Periodendauermessung bestimmten Massenträgheitsmomenten der Körper. Auf den an seinem Ende eingespannten Stab wird mit Hilfe des im Abstand r senkrecht zum Stab angreifenden Kraftmessers die Kraft F ausgeübt. Aus ~ = ~r × F~ wird das Direkdem Auslenkungswinkel ϕ und dem Drehmoment M tionsmoment Dm bestimmt. 5. Führen Sie Fehlerrechnungen zu allen Berechnungen durch. 2 erstellt: 7.10.2016