VU Technische Grundlagen der Informatik Übung 4
Werbung

VU Technische Grundlagen der Informatik
183.579, 2014W
Übung 4: Schaltwerke
Übungsgruppen: Mo., 24.11. – Mi., 26.11.2014
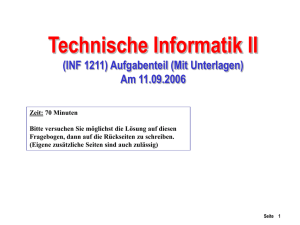
Aufgabe 1: ROM-Erweiterung
ROM
32x4
EN
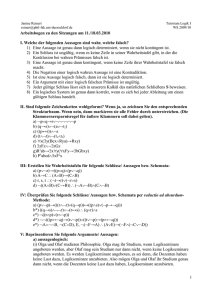
Ein 64x16 ROM soll aus mehreren 32x4 ROMs (vgl. Abbildung rechts:
ADDR = Adressleitungen, DATA = Datenleitungen, EN = EnableLeitung) aufgebaut werden.
5
ADDR
DATA
4
a) Wie viele ROM-Bausteine benötigen Sie für den Aufbau des 64x16 ROMs?
b) Wie viele Adress- bzw. Datenleitungen benötigt der 64x16 ROM?
c) Wie viele Bytes Daten können im 64x16 ROM insgesamt gespeichert werden?
d) Skizzieren Sie den Aufbau des 64x16 ROM, bestehend aus der entsprechenden Anzahl von 32x4 ROMBauteilen und dem unten vorgedruckten (2 zu 1) Multiplexer. Weitere Bauteile (Decoder, NOT-Gatter,
etc.) stehen Ihnen nicht zur Verfügung. Achten Sie auf eine korrekte Beschriftung der Leitungen!
EN
MUX
S
16
16
0
1
16
Allgemeiner Hinweis: Zwecks Vereinfachung entfällt bei den nachfolgenden Aufgabenstellungen
mit Automaten die Kennzeichnung von Endzuständen – es können jeweils alle Zustände als gültige
Endzustände betrachtet werden. Startzustände sind aber immer zu kennzeichnen!
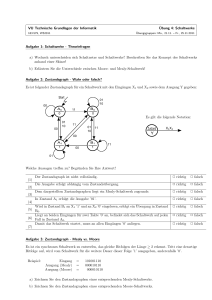
Aufgabe 2: Zustandsgraph – Wahr oder falsch?
Gegeben ist der folgende Automat:
Start
11,10
A0
0
10
01
01
00
B0
B0
0
Notation:
11
10
11
00
11
Zustand
a
e 1e 2
00
A1
B0
1
00
B1
B0
1
01
01,10
Welche Aussagen treffen zu? Begründen Sie Ihre Antwort!
(1)
Beim dargestellten Automaten handelt es sich um einen Mealy-Automaten.
2 richtig
2 falsch
(2)
Der dargestellte Automat ist vollständig und deterministisch.
2 richtig
2 falsch
(3)
Der dargestellte Automat ist endlich.
2 richtig
2 falsch
(4)
Der dargestellte Automat verfügt über einen Eingang und zwei Ausgänge.
2 richtig
2 falsch
(5)
Sobald der Automat gestartet wurde gibt er ’0’ aus.
2 richtig
2 falsch
(6)
Im Zustand B1 erfolgt die Ausgabe ’01’.
2 richtig
2 falsch
(7)
Liegt nach dem Start an beiden Eingängen einen Takt lang ’0’ an, befindet
sich der Automat im Zustand A1 .
2 richtig
2 falsch
(8)
Liegt an beiden Eingängen für zwei Takte lang ’1’ an, befindet sich der
Automat jedenfalls im Zustand A0 .
2 richtig
2 falsch
(9)
Liegt nach dem Start am Eingang e2 konstant ’1’ an, verharrt der Automat
im Zustand A0 .
2 richtig
2 falsch
(10)
Die Zustände des dargestellten Automaten können bei 1 aus n-Codierung
mit drei Flip-Flops realisiert werden.
2 richtig
2 falsch
(11)
Die Zustände des dargestellten Automaten können bei dichter Codierung mit
zwei Latches realisiert werden.
2 richtig
2 falsch
Aufgabe 3: Entwurf eines Zustandsgraphen
Zeichnen Sie den Zustandsgraphen eines Mealy-Schaltwerks, das der nachfolgenden Beschreibung entspricht. Verwenden Sie die rechts angeführte Notation.
Zustand
e / a 2a 1a 0
Das Schaltwerk soll in Abhängigkeit von einem binären Eingang e die Zahlen im Intervall [−3; +4] als drei
Bit lange Exzess-codierte Zahl (a2 a1 a0 )2 mit Exess = (3)10 und a0 als lsb wie folgt ausgeben:
• Ist der Eingang ’0’, sollen die Zahlen 0 → +1 → +2 → +3 → +4 → 0 → +1 → . . . ausgegeben werden.
• Ist der Eingang ’1’, sollen die Zahlen 0 → −1 → −2 → −3 → 0 → −1 → . . . ausgegeben werden.
• Wenn sich der Eingang ändert, soll unmittelbar mit der nächsten Zahl in die andere Sequenz gewechselt
werden (siehe Beispiel).
• Vom Startzustand ausgehend soll, abhängig von e, die Zahl ±1 ausgegeben werden.
e=1
e=0
e=0
e=1
e=0
e=0
e=1
e=0
e=0
Beispiel: −−→ −1 −−→ +2 −−→ +3 −−→ 0 −−→ +1 −−→ +2 −−→ −3 −−→ +4 −−→ 0 → . . .
Aufgabe 4: Timing-Diagramm
Es ist folgende Schaltung gegeben:
D 1 Q1
A
1
B
&
D 2 Q2
=1
Takt
Überlegen Sie sich die Funktionsweise der Schaltung, sodass Sie diese in der Übung erklären können und
vervollständigen Sie das nachfolgende Timing-Diagramm! Achten Sie dabei auf die Flankentriggerung!
Takt
Q1
Q2
A
B
Aufgabe 5: Maximale Taktfrequenz
a) Bestimmen Sie die Komponenten von Übergangs- und Ausgangsfunktion der Schaltung! Welche dieser
beiden Funktionen muss bei der Berechnung der maximalen Taktfrequenz wie berücksichtigt werden?
b) Berechnen Sie die maximale Taktfrequenz für das Schaltwerk aus Aufgabe 4! Es gelten folgende Werte:
Durchlaufzeit NOT-Gatter: 15 ns
Durchlaufzeit AND-Gatter: 20 ns
Durchlaufzeit XOR-Gatter: 25 ns
Durchlaufzeit D-Flip-Flop: 75 ns
Vorbereitungszeit D-Flip-Flop: 5 ns
Haltezeit D-Flip-Flop: 3 ns
Maximale Taktfrequenz D-Flip-Flop: 10 MHz
Aufgabe 6: Analyse eines Schaltwerks mit JK-Flip-Flops
Der Zustandsgraph eines Schaltwerks ist gegeben, es gilt folgende Notation:
e1e0/a
Zustand
11/1
Start
00/1
Z0
01/1
Z1
01,10,11/0
10/1
Z2
00,10,11/0
Z3
00,01,11/0
00,01,10/0
a) Analysieren Sie den Zustandsgraphen. Um welche Art von Schaltwerk handelt es sich? Welche Funktion
realisiert dieses Schaltwerk, wenn die Eingänge als zweistellige Binärzahl (e1 e0 )2 aufgefasst werden?
b) Tragen Sie in der unten vorgedruckten Tabelle zunächst die Zuständsübergänge und die Ausgangsfunktion a des Schaltwerks ein! Qi bezeichnet
dabei den aktuellen Zustand und Q0i den Nachfolgezustand des i-ten
Zustandsspeichers. Es gilt die rechts vorgegebene dichte Zustandscodierung.
Q2
Q1
Zustand
0
0
1
1
0
1
0
1
Z0
Z1
Z2
Z3
c) Wie Sie später herausfinden, wurden die Zustandsspeicher des Schaltwerks mit JK-Flip-Flops realisiert,
wobei die Beschaltung J=0, K=1 für Reset bzw. J=1, K=0 für Set verwendet wurde. Tragen Sie die
resultierenden Werte für die Vorbereitungseingänge J2 , K2 , J1 und K1 in die Tabelle ein!
e1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
e0
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Q2
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
Q1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
Zustand
Q02
Q01
a
J2
K2
J1
K1
Aufgabe 7: Realisierung eines Schaltwerks mittels PLD
Entwerfen Sie eine taktgesteuerte Schaltung mit einem Eingang e und drei Ausgängen a1 , a2 und a3 , die die
Funktion des folgenden Moore-Automaten realisiert:
1
Z0
Z1
1
1
Z2
100
000
0
0
0
1
0
Z3
1
0
Start
010
111
Z4
010
1
0
Zustand
e
Z5
a 1a 2a 3
110
a) Vervollständigen Sie für den Automaten die nachfolgende Tabelle der Zustandsübergänge!
Es wird dichte Zustandscodierung verwendet, entsprechend sind 23 = 8 Codierung möglich. Überlegen
Sie sich, wie mit den unbenutzten Codierungen am besten umgegangen wird!
Hinweis: Die Ausgabe (a1 bis a3 ) ist immer vom aktuellen Zustand (Q1 bis Q3 ) anzugeben!
e
0
1
0
1
0
1
0
1
0
1
0
1
Q1
0
0
1
1
0
0
1
1
0
0
1
1
Q2
0
0
0
0
1
1
1
1
0
0
0
0
Q3
0
0
0
0
0
0
0
0
1
1
1
1
Z0
Z1
Z2
Z3
Z4
Z5
D1
D2
D3
a1
a2
a3
b) Bringen Sie die Übergangsfunktion mit den folgenden KV-Diagrammen in minimale disjunktive Form!
D1
¬Q1
Q1 ¬Q1
z }| {
¬e
D2
Q
2
¬Q2
(
e
¬e
| {z } | {z }
¬Q3
Q3
¬Q1
Q1 ¬Q1
z }| {
¬e
D3
Q
2
¬Q2
(
e
¬e
| {z } | {z }
¬Q3
Q3
¬Q1
Q1 ¬Q1
z }| {
¬e
Q
2
¬Q2
(
e
¬e
| {z } | {z }
¬Q3
Q3
c) Realisieren Sie das Schaltwerk mit dem vorgegebenen PLD! Für die Realisierung der Ausgangsfunktion
stehen Ihnen ein AND-Gatter sowie ein OR-Gatter zur Verfügung. Vergessen Sie nicht, sämtliche Einund Ausgänge der Schaltung entsprechend zu beschriften! (Takt, Reset und a1 sind bereits beschriftet.)
1
1
1
1
1
1
1
&
&
&
&
>1
D Q
&
Reset
&
&
&
&
&
&
>1
D Q
&
Reset
&
&
&
&
&
&
>1
D Q
&
Reset
&
&
Takt
Reset
1
a1
Aufgabe 8: Schaltwerksentwicklung – Hexapod Roboter / Teil 1
Entwerfen Sie Zustandsgraphen für die Steuerung des nachfolgend beschriebenen sechsbeinigen Roboters
(Hexapod). Der schematische Aufbau der Konfiguration ist wie folgt:
Drehen
Gehen
G
Rotieren
Fernsteuerung
D
Steuerung
R
F
L
V
Fehler
LED
Vorwärts
Mittels einer Fernsteuerung hat man die Möglichkeit, die Fortbewegung des Hexapods zu kontrollieren.
Es stehen zwei Tasten zur Verfügung: Wird die Taste ”Gehen” gedrückt, bewegt sich der Hexapod vorwärts.
Wird die Taste ”Rotieren” oder werden beide Tasten gleichzeitig gedrückt, dreht sich der Hexapod um die
eigene Achse. Wird keine Taste gedrückt, verharrt der Hexapod ohne Bewegung.
Zusätzlich befindet sich auf der Fernsteuerung eine LED, die beim Auftreten eines technischen Fehlers rot
aufleuchtet. Ist der Hexapod betriebsbereit, leuchtet sie grün auf.
Die Erkennung der technischen Fehler erfolgt über Sensoren, die zwecks Vereinfachung auf ein einziges
Signal zusammengeschaltet sind. Tritt ein Fehler auf, wechselt der Automat in den Fehler-Zustand und
verbleibt dort, bis der Fehler beseitigt wurde. Wurde der Fehler beseitigt, verharrt der Hexapod einen
Moment bewegungslos, ehe er bereit ist, die nächste Bewegung auszuführen.
Die Ein- bzw. Ausgänge der Steuerung sind wie folgt festgelegt:
• Der Eingang G liefert logisch ’0’, wenn die ”Gehen”-Taste gedrückt wird, anderenfalls logisch ’1’.
• Der Eingang R liefert logisch ’0’, wenn die ”Rotieren”-Taste gedrückt wird, anderenfalls logisch ’1’.
• Am Eingang F liegt bei Vorliegen eines Fehlers logisch ’0’ an, anderenfalls logisch ’1’.
• Liegt am Ausgang V logisch ’1’ an, geht der Hexapod vorwärts.
• Liegt am Ausgang D logisch ’1’ an, dreht sich der Hexapod um die eigene Achse.
• Das Signal L steuert die Anzeige-LED. Bei logisch ’1’ leuchtet die LED rot, bei logisch ’0’ grün.
a) Zeichnen Sie einen entsprechenden Mealy-Automaten unter Verwendung der
rechts angegebenen Notation.
b) Zeichnen Sie einen entsprechenden Moore-Automaten unter Verwendung
der rechts angegebenen Notation.
Zustand
Zustand
VDL
GRF/VDL
GRF