Computer unterstützte Navigation für minimal invasive Intervention
Werbung

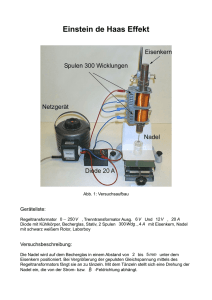
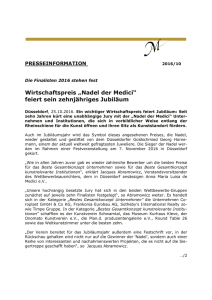
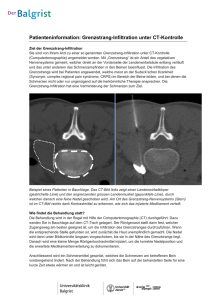
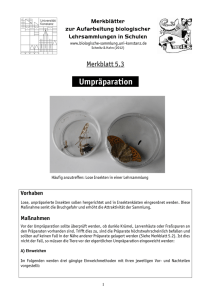
39. DGMP Tagung 2008 in Oldenburg Computer unterstützte Navigation für minimal invasive Intervention mit CT und C-Arm Systemen Markus Nagel1 1CAS innovations AG, Erlangen, Deutschland Einleitung Bildgestützte, minimal-invasive Interventionen gehören in der heutigen Zeit zum klinischen Standard in der Radiologie. Minimal-invasive Techniken reduzieren das Risiko von Komplikationen, sind patientenschonend und lassen sich schnell umsetzen. Auf der anderen Seite verlangen solche Interventionen viel Erfahrung und Geschicklichkeit des Radiologen. Relevante Appliktionen in der interventionellen Radiologie erstrecken sich von minimal-invasiven perkutanen Interventionen wie Biopsien, Vertebroplastien / Kyphoplastien / Drainagen bis hin zur Radiofrequenzablation. Im Allgemeinen also jegliche medizinische Applikationen, bei denen eine Nadel an eine bestimmte Stelle im Körper vorgeschoben werden muss. Bei Interventionen, die eine hohe Genauigkeit erfordern und bei denen eine fehlerhafte Positionierung der Nadel zu gefährlichen Komplikationen führen kann, muss die Position der Nadel während des Vorschubs im Patienten durch wiederholte Kontrollscans überprüft und gegebenenfalls korrigiert werden. Dabei sind fünf bis zehn oder sogar mehr Kontrollaufnahmen keine Seltenheit. Dies erhöht zum einen die gesamte Interventionszeit als auch die Strahlenexposition für den Patienten und den Arzt. Darüber hinaus werden bei perkutan durchgeführten Interventionen oftmals genaue Kenntnisse über die zu Grunde liegende Anatomie benötigt. 3D-Informationen sind für die optimale Planung eines Zugangsweges nötig. Insbesondere schräg liegende Zugangswege lassen sich oft nicht in ein oder zwei transversalen CT-Bildern darstellen. Dies erschwert die gesamte Planung oder solche Trajektorien sind letztendlich nicht umsetzbar, da die Gefahr einer Komplikation durch ein fehlerhaftes Positionieren der Nadel zu groß ist. Schwierigkeiten ergeben sich auch beim Nadelvorschub. Hier muss der Arzt entlang einer gedachten 3D-Linie die Nadel ohne Führungshilfe vorschieben. Ermüdungserscheinungen und das Zittern der Hand stellen hier weitere Probleme dar. Während computerunterstützte Navigationssysteme in der Orthopädie sich bereits bewährt haben, sind solche System im Bereich der interventionellen Radiologie noch sehr rar. In der Orthopädie kommen größtenteils optisch arbeitende Navigationssysteme zum Einsatz, die für minimal-invasive Anwendungen aufgrund ihrer Hardwarevorraussetzungen und Komplexität nicht besonders geeignet sind. Neu entwickelte computerunterstützte Navigationssysteme mit elektromagnetischem Tracking dagegen sind klein, handlich und in der Lage den Arzt bei der Durchführung von minimal-invasiven Interventionen zu unterstützen. Beim elektromagnetischen Tracking werden Instrumente, wie Beispielsweise eine Biopsienadel, mit einer kleinen Spule in der Spitze ausgerüstet. Diese Spule kann in dem elektromagnetischen Feld geortet werden. Auf diese Weise ist es möglich, die Position einer Nadel direkt in einem präoperativ erstellten Datensatz virtuell am Bildschirm darzustellen. Das Ziel der neuen computerunterstützten Navigationssystemen ist es, den Arzt bei perkutanen Interventionen zu unterstützen und gleichzeitig ohne zusätzliche Röntgenstrahlung die Nadel präzise zu positionieren. Verfahren Das elektromagnetische Navigationssystem (CAPPA IRAD EMT, CAS innovations AG, Erlangen, Deutschland) besteht aus einem Trackingsystem, einem Standard PC mit Touchscreen Funktionalität für Interaktionen und einem mobilen Rack. Ein Feldgenerator, Teil des Trackingsystems, erzeugt ein elektromagnetisches Feld mit einem Arbeitsvolumen von ca. 500500500 mm. Bringt man eine Spule in dieses Feld, wird eine Spannung in der Spule induziert. Die Spannung wird von einer Kontrolleinheit (CIU) gemessen. Je nach induzierter Spannung kann somit festgestellt werden, wo sich die Spule in dem Feld befindet. Die Bilddaten werden mit einem CT-Scan oder einem CT-fähigen C-Bogen erhoben und nach der Bildaufnahme über das TCP/IP Netzwerk an das Navigationssystem gesendet. In der Abbildung 1 sind alle Komponenten des Navigationssystems und ihre Zusammenhänge dargestellt. 39. DGMP Tagung 2008 in Oldenburg R ac k F ield g enerator T ools C IU Imag ing s ys tem S erial P ort Input/O utput T C P /IP (DIC O M network applic ation) Abbildung 1:Navigationskomponenten: Tools (Nadeln, Hautsensor), Feldgenerator (Field generator), Kontrolleinheit (CIU), Bildgebung (Imaging system) und das Rack mit Touchscreen Monitor und integriertem PC. Um die Spitze einer Interventionsnadel zu „tracken“, werden kleine Spulen in die Spitze der Nadel eingebracht (Abbildung 2). Auf diese Weise ist es möglich, auch bei einem Verbiegen der Nadel während des Vorschubes durch Gewebe die exakte Position der Nadelspitze zu bestimmen, die dann im Datensatz eines Patienten zur Verfolgung angezeigt wird. Abbildung 2: Spule mit einem Durchmesser von 0.8 mm und einer Länge von 9 mm, wie sie Beispielsweise in der abgebildeten Nadelspitze oben im Bild, eingebaut ist. Ein am Patient befestigter Hautsensor erfasst während des gesamten Eingriffs ständig die Bewegungen des Patienten und meldet diese an das Navigationssystem. Der Sensor besteht aus zwei orthogonal angeordneten Spulen. Somit ist die Position des Sensors im Arbeitsfeld des Trackingsystems bestimmbar. Ein weiterer baugleicher Sensor ist zusammen mit CT-Markern in einer Patientenplatte fest eingebaut. Der eingebaute Sensor dient dem Navigationssystem als Referenz und wird gleichzeitig für die Patientenregistrierung verwendet. Vor der Datenakquise mit einem CT oder C-Arm mit CT Option wird die Platte zusammen mit dem Sensor am Patienten angebracht. Die Position der CT-Marker relativ zum Sensor (Trackingkoordinatensystem) ist fest und bekannt. Nach der Bildaufnahme bestimmt ein Marker-Detektions-Algorithmus innerhalb der Navigationssoftware die Position der CT-Marker im Bildkoordinatensystem. Anschließend kann eine 39. DGMP Tagung 2008 in Oldenburg vollautomatische Patienten-zu-Bild-Registrierung durchgeführt werden. Ab diesem Zeitpunkt ist die Position der Nadel relativ zum Datensatz des Patienten bestimmt und am Monitor sichtbar (siehe Abbildung 3). Abbildung 3: Screenshot einer navigiert durchgeführten Intervention. Eine trackbare Nadel wird für eine anschließende Radiofrequenzablation unmittelbar vor den Tumor in der Wirbelsäule vorgeschoben. Klinische Ergebnisse Bisher wurden mehr als 25 Interventionen mit dem vorgestellten Navigationssystem CAPPA IRAD EMT erfolgreich durchgeführt. Das Anwendungsgebiet erstreckte sich von Lungenbiopsien, Nierenbiopsien, Biopsien am Knochen, Vertebroplastien und Kyphoplastien, Drainagen bis hin zu Radiofrequenzablationen an der Wirbelsäule. Bei keiner navigiert durchgeführten Intervention traten Komplikationen auf und alle Interventionen konnten erfolgreich abgeschlossen werden. Die Gesamtzahl der gefahrenen Scans reduzierte sich auf einen Planungsscan und einen Kontrollscan, bei bereits finaler Position der Nadel. Lediglich bei einer Intervention wurde während des Nadelvorschubs ein weiterer Kontrollscan zur Sicherheit durchgeführt. Somit konnte die Anzahl der Kontrollscans während der Intervention im Vergleich zum konventionellen Vorgehen ohne Navigation deutlich reduziert werden. Mit Hilfe des Planungsmoduls war es möglich auch komplexe doppelt schräge Zugangswege in einer vergleichbaren Interventionszeit umzusetzen, wie bei einfachen Zugangswegen innerhalb einer Schicht. Die gesamte Navigation (Ausrichten der Nadel und Nadelvorschub zur Zielposition) war bei allen Interventionen in weniger als 3 Minuten abgeschlossen. Diskussion Die vorgestellte Navigationsmethode mit elektromagnetischem Tracking (EMT) eignet sich besonders für minimal-invasive Interventionen in der interventionellen Radiologie. Standard Biopsienadeln mit einem Durchmesser von 11 – 18G und einer Länge von 50 mm – 200 mm können heutzutage problemlos mit einer trackbaren Spule in der Spitze ausgerüstet werden. Auch spezielle Nadeln für Vertebroplastien oder Knochenbiopsien kommen zum Einsatz. Aufgrund der Tatsache, dass das elektromagnetische Trackingsystem im Gegensatz zum optisch arbeitenden Navigationssystem keinen direkten Sichtkontakt zum Navigationswerkzeug (Nadel) benötigt, kann es unkompliziert direkt in die Bildgebungsmodalität integriert werden (z.B. angebracht unter dem Tisch). Über die DICOM-Schnittstelle können die Navigationssysteme an verschiedene Bildgebungsmodalitäten wie CT oder CArm Systeme mit CT Option problemlos über das LAN Netzwerk angeschlossen werden. Erste klinische Einsätze zeigten, dass eine Vielzahl von Interventionen sicher und präzise durchgeführt werden können. Besonders die Interventionszeit und die Strahlenbelastung lassen sich mit einem solchen Navigationssystem weiter reduzieren.