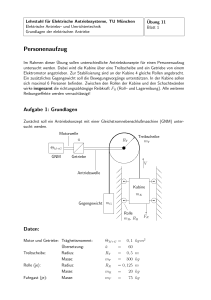
Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 1 Personenaufzug Im Rahmen dieser Übung sollen unterschiedliche Antriebskonzepte für einen Personenaufzug untersucht werden. Dabei wird die Kabine über eine Treibscheibe und ein Getriebe von einem Elektromotor angetrieben. Zur Stabilisierung sind an der Kabine 4 gleiche Rollen angebracht. Ein zusätzliches Gegengewicht soll die Bewegungsvorgänge unterstützen. In der Kabine sollen sich maximal 6 Personen befinden. Zwischen den Rollen der Kabine und den Schachtwänden wirke insgesamt die richtungsabhängige Reibkraft FR (Roll– und Lagerreibung). Alle weiteren Reibungseffekte werden vernachlässigt! Aufgabe 1: Grundlagen Zunächst soll ein Antriebskonzept mit einer Gleichstromnebenschlußmaschine (GNM) untersucht werden. Motorwelle ü ΘM +G GNM ¡ Treibscheibe mT µ RT ¡ ¡ ¡ ¡ x ¡ Getriebe 6 V Antriebswelle Gegengewicht mG ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ rm rm Kabine mK A A Rolle mR , R R ? FR Daten: Motor und Getriebe: Trägheitsmoment: Übersetzung: Treibscheibe: Radius: Masse: Rolle (je): Radius: Masse: Fahrgast (je): Masse: ΘM +G ü RT mT RR mR mF = 0, 1 kg m2 = 60 = 0, 5 m = 300 kg = 0, 125 m = 20 kg = 75 kg @ @ @ @ rm @ @ @ @ @ @ @ @ rm @ @ @ @ @ @ @ @ Masse der leeren Kabine: Masse des Gegengewichts: Maximale Geschwindigkeit der Kabine : Reibkraft (an der Kabine angreifend): mK mG Vmax FR Erdbeschleunigung: g = = = = 500 750 1, 5 600 kg kg m s−1 N · sign (V ) = 9, 81 m s−2 Die Treibscheibe und die Rollen sollen jeweils als Vollzylinder mit den angegebenen Werten betrachtet werden. Das Seil soll in den Berechnungen vernachlässigt werden. 1.1 Berechnen Sie das gesamte auf den Motor wirkende Trägheitsmoment Θges (Kabine voll besetzt). 1.2 Wie groß ist das gesamte auf den Motor wirkende Widerstandsmoment MW ges in Aufwärtsbewegung bei einer vollbesetzten Kabine ? Berechnen Sie diesen Wert auch für die Abwärtsbewegung ! 1.3 Ab wieviel Fahrgästen befindet sich der Motor bei aufwärts fahrendem Aufzug im motorischen Betrieb ? 1.4 Berechnen Sie die Nennleistung PN des Motors für folgende Auslegungskriterien: Beim Anfahren mit Nennmoment (Kabine voll besetzt, Aufwärtsfahrt) soll zusätzlich der zweifache Wert des stationären Widerstandsmoments zur Beschleunigung zur Verfügung stehen. Außerdem soll der Motor bei halber Maximalgeschwindigkeit der Kabine mit Nenndrehzahl fahren. Die folgenden Aufgaben sind unabhängig von den bisherigen Ergebnissen lösbar. 1. Quereinstieg: allgemeine Fragen 1.5 Skizzieren und erläutern sie qualitativ das Grundprinzip einer DC–DC–Wandlung. 1.6 Welche Stellgrößen bzw. Stelleingriffe stehen dem Anwender zur Beinflussung des Verhaltens einer GNM zur Verfügung ? Skizzieren Sie den Einfluß der jeweiligen Stellgrößenänderung in einem n–m–Diagramm. Die folgenden Aufgaben sind unabhängig von den bisherigen Ergebnissen lösbar. 2. Quereinstieg: Fahrvorgänge Es soll nun das dynamische Verhalten der GNM bei Aufwärtsfahrt untersucht werden. Für die GNM gelten nun allgemein neue Zahlenwerte (alle auf den Motor bezogen und bereits normiert): rA ηmech = 0, 2 = 1 mW 6 mW 1 = 0, 5 = 0, 1 TΘN TA = ≈ 0, 8 s 0 ψ = 1 Dabei entspricht mW 6 dem gesamten Widerstandsmoment bei voller Kabine und mW 1 dem Widerstandsmoment bei nur einem Fahrgast in der Kabine. Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 2 Vom Erdgeschoß aus wird die vollbesetzte Kabine zunächst mit Nennmoment beschleunigt (Phase a) bis die natürliche Motorkennlinie (uA = 1) bei der Drehzahl na erreicht wird. Danach wird auf dieser Kennlinie bis zur stationären Drehzahl n∞ b weitergefahren (Phase b). 1.7 Nach welcher Zeit ta erreicht der Motor die Drehzahl na ? 1.8 Berechnen Sie für die Fahrt in Phase b den genauen Drehzahlverlauf nb (t). Leiten Sie dazu die Drehzahl–Differentialgleichung her (keine Laplace–Transformation) ! Zum Abbremsen im ersten Stock wird der Motor auf iA = 0 geregelt, bis der Aufzug zum Stillstand kommt (Phase c). Bei Drehzahl nc = 0 wird dieser mechanisch festgehalten. 1.9 Skizzieren Sie den Bremsvorgang ausgehend von n∞ b quantitativ in ein n–t–Diagramm. Nachdem fünf Personen den Aufzug verlassen haben, fährt dieser weiter nach oben. Dazu wird er zunächst mit dem Ankerstrom iA d = konstant beschleunigt (Phase d) bis die Kennlinie bei uA e erreicht wird. Auf dieser wird wieder bis zur stationären Drehzahl n∞ e weitergefahren. 1.10 Wie muß iA d gewählt werden, um das selbe Beschleunigungsmoment zu erhalten wie in Phase a? Wie muß uA e gewählt werden, so daß n∞e = n∞b gilt ? 1.11 Zeichnen sie den kompletten Fahrvorgang (Phase a–e) ins vorgegebene n–m–Diagramm. Kennzeichnen Sie hierbei deutlich die einzelnen Phasen ! Aufgabe 2: Regelkreisanalyse Für ein möglichst genaues Anfahren jedes Stockwerks wird die GNM mit einer dreifachen Kaskadenstruktur lagegeregelt (Stromregler, Drehzahlregler, Lageregler). Zudem soll eine EMK–Aufschaltung realisiert werden. Der Motor sei nennerregt (ψ = 1). Der Stromregler soll P I–Verhalten, der Drehzahlregler und der Lagerregler sollen jeweils P – Verhalten aufweisen. Das Widerstandsmoment mW wird als konstant angenommen. Daten: Motor (GNM): rA TA TΘN mW VRi TRi VRn VRx xsoll VStr Trägheitsmoment der Last: Widerstandsmoment: Stromregler (P I–Verhalten): Drehzahlregler (P –Verhalten): Lageregler (P –Verhalten): Stromrichter (P –Verhalten): = 0, 2 = 20 ms = 0, 5 s = 0, 5 = 2 = 20 ms = 50 = (gesucht) = 1 = 1 2.1 Welchen Vorteil bringt eine EMK–Aufschaltung ? Nennen Sie drei Vorteile einer Kaskadenreglerstruktur ! 2.2 Zeichnen Sie den kompletten Signalflußplan der Gleichstromnebenschlußmaschine und deren Regelung mit xsoll , mW und ψ als unabhängige Eingangsgrößen, sowie der Lage x als Ausgangsgröße. Kennzeichnen Sie dabei deutlich die EMK–Aufschaltung ! 2.3 Wie groß muß die Reglerverstärkung VRx mindestens gewählt werden, um maximal eine stationäre Regelabweichung von 1 % zu erreichen ? Warum darf VRx nicht beliebig erhöht werden ? 2.4 Schlagen Sie mögliche Maßnahmen vor, wie eine höhere stationäre Genauigkeit erzielt werden kann. Aufgabe 3: Asynchronmaschinen–Antrieb Bei Modernisierungsmaßnahmen soll der Gleichstrommaschinenantrieb des Aufzugs durch einen modernen umrichtergespeisten Asynchronmaschinen–Antrieb (ASM) mit Kurzschlußläufer ersetzt werden. Diese Lösung bietet hinsichtlich Wartungsaufwand und Kosten einige Vorteile. Folgende Daten der ASM mit Kurzschlußläufer sind gegeben : L1 F1N NN R1 = = = → 72 mH 60 Hz 1 1720 min 0 L2 Zp MiN R2 = = = = 72 mH 2 60 N m 0.2 Ω M = 68.3 mH ηmech = 1 |Ψ1N | = 0.98 V s Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 3 Alle Teilaufgaben sind unabhängig voneinander lösbar ! 3.1 Berechnen Sie folgende Kenngrößen der vorgeschlagenen ASM: NsynN , σ, U1N , PN , MKN , sKN und sN . 3.2 Skizzieren Sie die stationäre Drehmoment–Drehzahl–Kennlinie dieser ASM für Nennspeisung. Kennzeichnen Sie dabei markante Punkte der Kennlinie (Schlupf!) und wichtige Betriebsbereiche. 3.3 Welche prinzipiellen Möglichkeiten der Kennlinienbeeinflussung bei Asynchronmaschinen kennen Sie? Charakterisieren Sie diese Verfahren kurz (Betriebsbereich, Kennlinienskizze, eventuelle Nachteile). 3.4 Zum Beschleunigen des Aufzugs soll die ASM das 3–fache Widerstandsmoment aufbringen (MW = 24 N m). Berechnen Sie den dafür notwendigen Schlupf bei Nennspeisung. 3.5 U1 ~ 1 = U1 = reell) (U Ω1 σL1 normierte Ortskurve für den Raumzeiger des Statorstromes I~1 (Heyland–Kreis) für die vorgeschlagene ASM. a) Zeichnen Sie auf das beiliegende Hilfsblatt die auf b) Bei einem Schlupf von s = 0.1 ergebe sich ein normierter Stromraumzeiger von I~1 U1 Ω1 σL1 = 0.27 − j0.19 Zeichnen Sie diesen Stromzeiger in das Hilfsblatt ein. c) Bestimmen Sie nun graphisch den Wert des Kippschlupfs sK . Bestimmen Sie weiterhin die Punkte s = 0, s = 1 und s → ∞ auf dem Heylandkreis. d) Zeichnen Sie die Leistungslinie in das Hilfsblatt ein. Bestimmen Sie damit das Verhältnis von abgegebener mechanischer Leistung zu eingespeister Wirkleistung in dem eingezeichneten Betriebspunkt (siehe Punkt a)). e) Mit welcher Frequenz F1 wird die Maschine in diesem Betriebspunkt gespeist, und mit welcher mechanischen Drehzahl Nm dreht sie sich? 3.6 Welche beiden prinzipiellen Verfahren zur Regelung von Drehfeldmaschinen kennen Sie, und wodurch unterscheiden sich diese grundsätzlich? Aufgabe 4: Umrichterantriebe Alle Teilaufgaben sind unabhängig voneinander lösbar ! 4.1 Der netzseitige Stromrichter von Umrichterschaltungen ist meist als B6–Brücke mit Thyristoren realisiert. a) Wie groß ist der maximale Gleichspannungsmittelwert am Ausgang einer solchen B6–Brücke abhängig vom Effektivwert der anliegenden Phasenspannung U ? Bei welchem Zündwinkel wird diese maximale Ausgangsspannung erreicht? b) Wie ist der natürliche Zündzeitpunkt α = 0o definiert? c) Erklären Sie die Betriebsarten Gleichrichterbetrieb“ und Wechselrichterbetrieb“ ” ” einer B6–Brücke? 4.2 Erklären Sie die Begriffe netzgeführt“, lastgeführt“, selbstgeführt“, Vierquadranten” ” ” ” betrieb“. 4.3 Umrichter können ohne und mit Energiespeicherung in einem Zwischenkreis aufgebaut sein. Wie bezeichnet man diese beiden Bauformen? Nennen Sie jeweils Vor– und Nachteile beider Varianten. 4.4 Für die Aufzuganlage mit Asynchronmaschinenantrieb (Kurzschlußläufer) soll ein geeignetes Stellglied gefunden werden, das Vierquadrantenbetrieb ermöglicht. Dafür werden I–Umrichter und U–Umrichter näher betrachtet. a) Wodurch unterscheiden sich prinzipiell I–Umrichter und U–Umrichter hinsichtlich Aufbau und Funktion? Skizzieren Sie beide Varianten und benennen Sie die Funktionen der einzelnen Schaltungsteile. b) Welchen Vorteil bietet der U–Umrichter hinsichtlich elektrischer Belastung der Maschine? c) Welche Steuereingriffe hat man jeweils mit beiden Umrichtertypen auf die ASM, und mit welchen Teilen der Schaltungen werden diese realisiert? 4.5 Welche Vorteile bietet ein mit abschaltbaren Ventilen (z.B. GTOs) aufgebauter maschinenseitiger Stromrichter beim I– oder U–Umrichter im Vergleich zu einem mit Thyristoren aufgebauten maschinenseitigen Stromrichter hinsichtlich Aufbau, Kommutierung und erreichbarer Taktfrequenz? Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 4 Lösung zu Aufgabe 1: 1.1 Die auf die Motorwelle bezogenen Teil–Trägheitsmomente ΘT (Treibscheibe), ΘK+G+F (Kabine, Gegengewicht und Fahrgäste), ΘR (Rollen translatorisch und rotatorisch) sowie das Gesamt–Trägheitsmoment Θges ergeben sich mit der Anzahl ZF der Fahrgäste zu: 1 ü2 1 = 2 ü 1 = 2 ü ΘT = ΘK+G+F ΘR · RT2 mT 2 RT2 (mK + mG + ZF mF ) 2 mR 1 RT2 RR 4 · 2 ü2 RR 2 RT2 4 mR + Θges = ΘM +G + ΘT + ΘK+G+F + ΘR R2 = ΘM +G + 2T ü µ 3 mT + m K + m G + ZF mF + 4 m R 2 2 ¶ = 0, 237 kg m2 1.2 Widerstandsmoment bei Aufwärtsfahrt MW auf und Abwärtsfahrt MW ab : RT ü RT = ü MW auf = MW ab ³ (mK − mG )g + ZF mF g + 4 mR g + |FR | = 27, 89 N m ´ ³ (mK − mG )g + ZF mF g + 4 mR g − |FR | = 17, 89 N m ´ 1.3 Die Bedingung für motorischen Betrieb lautet MW auf > 0: Auflösen der Gleichung nach der Anzahl der Fahrgäste ZF ergibt, daß sich die GNM bei 2 oder mehr Fahrgästen im motorischer Betrieb befindet: ZF mF g > −(mK − mG )g − 4 mR g − |FR | ZF > 1, 45 1.4 Zunächst wird die Nenndrehzahl NN und das Nennmoment MM iN der GNM aus den Angaben bestimmt und auf die GNM bezogen. Die Nenngeschwindigkeit VN des Aufzugs ist mit VN = Vmax /2 = 0, 75 m s−1 gegeben. ü Vmax ü = · = 14, 32 s−1 2π RT 2 2π RT = 3 · MW auf = 83, 67 N m NN = V N MM iN PN = 2π NN MM iN = 7, 53 kW 1.5 Prinzip der DC–DC–Wandlung: Periodisches Ein– und Ausschalten des Schalters S erzeugt eine variable mittlere Gleichspannung ŪV an der Last (siehe auch Buch 1, Seite 99, und 4. Übung). Mit der Periodendauer T , der Einschaltdauer te (bzw, dem Tastverhältnis a) und der gegebenen Speisespannung UQ ergibt sich ŪV = te UQ = a U Q T S UV UQ Id DF = Last 1.6 Mögliche Stelleingriffe ergeben sich aus der Gleichung der normierten Kennlinie der GNM rA (1 + rV ) mM i = ψ uA − ψ 2 n Die folgende Abbildung zeigt die Auswirkung bei • reduzierter Ankerspannung uA , • Einführung eines Vorwiderstands rV , • abnehmendem Fluß ψ (Feldschwächung !). n n n y¯ uA ¯ rV ­ mMi mMi mMi 1.7 Die Bestimmung der Schaltdrehzahl na aus der normierten GNM–Kennlinie mit dem Motormoment mM i = 1 ergibt: n = uA − mM i rA = 1 − 1 · 0, 2 = 0, 8 = na Mit dem während Phase a konstanten Beschleunigungsmoment mB = mM i − mW 6 = 0, 5 kann der Schaltzeitpunkt ta aus der Bewegungs–Differentialgleichung bestimmt werden: TΘN dn = mB = mM i − mW 6 dt TΘN na = 1, 28 s ta = mB 1.8 Wird die umgeformte Kennlinien–Gleichung mM i = (uA − n)/rA in die Bewegungs– Differentialgleichung der GNM eingesetzt, erhält man: TΘN uA n dn = mM i − mW 6 = − − mW 6 dt rA rA Mit der Anfangsdrehzahl n0 = na = 0, 8, der Enddrehzahl n∞ b = uA − rA mW 6 = 0, 9 und der Zeitkonstante TΘSt = rA TΘN = 0, 16 ergibt sich als Lösung der Differentialgleichung: ³ ´ nb (t) = n∞ b + n0 − n∞ b e−t/TΘSt = 0, 9 − 0, 1 e−t/0,16 s Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 5 1.9 Da das Motormoment mM i = iA = 0 ist, ergibt sich ein negatives Beschleunigunsmoment mB = mM i − mW 6 = −0.5. Analog zu Aufgabe 1.7 kann der Drehzahlverlauf bei konstantem Motormoment berechnet werden. Die Dauer tBremsen des Bremsvorgangs ergibt sich daraus als Lösung für die Drehzahl n∞ c = 0. Der Drehzahlverlauf ist linear. mB t + n∞ b TΘN (n∞ b − n∞ c ) TΘN = 1, 44 s = mB nc (t) = tBremsen n n¥b t tBremsen 1.10 Während Phase d beträgt das Beschleunigungsmoment mB = 0, 5 und das Widerstandsmoment mW 1 . iA d = mM i = mB + mW 1 = 0, 6 Im stationären Fall gilt mB = 0. Mit der stationären Enddrehzahl n∞ e = n∞ b = 0, 9 und dem Motormoment mM i = mW 1 ergibt sich uA e = n∞ e + rA mM i = 0, 92 1.11 Fahrvorgänge der einzelnen Phasen: n 1 n¥b = n¥e nS Phase b Phase e 0,5 Phase d Phase c 0,1 mW1 0,5 mW6 Phase a 1 mMi Lösung zu Aufgabe 2: 2.1 EMK–Aufschaltung: • Kompensation der (physikalisch bedingten) EMK–Rückkopplung, • Einfache Regelkreisstruktur und –auslegung möglich. Kaskadenstruktur: • Einfache Regelkreise, • Einfache Inbetriebnahme (von innen“ nach außen“), ” ” • Begrenzung der Zwischengrößen möglich. 2.2 VRx xsoll VRn nsoll VRi TRi iA soll (TStr®0) VStr=1 uA soll mW 1/rA TA uA iA eA TqN mB 1 n x y EMKAufschaltung 2.3 Zur Analyse werden alle Integrator–Eingänge zu Null gesetzt: Für den P I–Stromregler folgt iA soll = iA , für den Drehzahlintegrator folgt iA ψ = mW . Die Drehzahl (= Eingang des Lageintegrators) ist ebenfalls stationär Null. Damit folgt für xsoll = 1: mW iA soll = = nsoll VRn VRn nsoll mW ∆x = xsoll − x = = ≤ 0, 01 VRx VRx VRn mW 0, 5 VRx ≥ = = 1 0, 01 · VRn 0, 01 · 50 ∆n = nsoll − n = VRx darf u.a. aus Gründen der Stabilität nicht beliebig erhöht werden. 2.4 • Entsprechende Korrektur von xsoll , so daß x∞ = 1 wird; • Erweiterung des Lagereglers um einen I–Anteil zu einem P I–Regler. Lösung Aufgabe 3: Asynchronmaschinen–Antrieb 3.1 F1N 1 = 30 = 1800 min−1 Zp s 2 M (68, 3 mH)2 σ = 1− =1− = 0, 1 L1 L2 (72 mH)2 1 U1N = Ω1N · |Ψ1N | = 2π · 60 · 0, 98 Vs = 369, 45 V s 1720 1 PN = 2π · MiN · NN = 2π · 60 Nm · = 10, 8 kW 60 s NsynN = Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe M2 3 U1N · Zp · 2 4 σL1 L2 Ω1N R2 = = 0, 0737 Ω1N σL2 NN = 1− = 0, 044 NsynN µ MKN = sKN sN 3.2 ¶2 Übung 11 Blatt 6 = 180 Nm MMi MK MMi(N=0) s N Nsyn N=0 s=0 sK s=1 motorisch generatorisch -MK instabil stabil instabil 3.3 Rotorvorwiderstände (nur mit Schleifringläufer möglich): Kennlinie wird flacher (weicher), erhöhte Verluste MMi MK bleibt gleich flacher Nsyn bleibt gleich s K' N sK sK verschiebt sich ohne Vorwiderstand mit Vorwiderstand Ankerstellbereich: Ψ1 = ΩU11 bleibt konstant Grenze: Ω1 = Ω1N , da dann U1 = U1N MMi MK bleibt gleich N Nsyn verschiebt sich s K' sK sK verschiebt sich Feldschwächbereich: U1 = U1N , Ω1 > Ω1N , d.h. Ψ1 sinkt Kennlinie wird flacher (weicher) MMi MK MK' Nsyn N Nsyn' Feldschwächbereich Nennspeisung 3.4 2ssK s2 + s2K = MKN = 180 Nm = sKN = 0, 0737 = 3 · MW = 72 Nm Kloss’sche Gleichung: MM i = MK · Nennspeisung: MK sK MM i ⇒ s2 − s = = ⇒s = s = 2MKN sKN · s + s2KN = 0 3MW v uµ 1u t 2MKN 2 2MKN sKN ± sKN − 4s2KN 2 · 3MW 2 3MW ³ ´ √ sKN 5 ± 25 − 4 2 sKN · 0, 2087 bzw. (sKN · 4, 79) sKN · 0, 2087 = 0, 0154 da s < sKN gelten muß für stabilen Betrieb ¶ Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe 3.5 Übung 11 Blatt 7 = 0, 55 a) Mittelpunkt = 1+σ 2 1−σ Radius = 2 = 0, 45 b) siehe Hilfsblatt c) Schlupfgerade → skalieren → sK = 0, 3 Rest siehe Hilfsblatt d) Pm = 3 · U1 · AB P1 = 3 · U1 · AC Pm AB 4, 85 cm ⇒ = = = 0, 898 P1 5, 4 cm AC e) R2 R2 0, 2 Ω = 14, 736 Hz ⇒ F1 = = Ω1 σL2 2πσL2 sK 2π · 0, 1 · 72 mH · 0, 3 Ωm · Zp Nm · Z p = = Ω1 F1 Pm F1 14, 736 s−1 = · = 0, 898 · = 6, 616 s−1 = 397 min−1 P 1 Zp 2 sK = Pm P1 ⇒ Nm 3.6 • Entkopplung: Regelung der Drehzahl, Steuerung des Flusses • Feldorientierung: Regelung von Fluß und Drehzahl Lösung Aufgabe 4: Umrichterantriebe 4.1 a) Udi0 √ √ √ √ 3· 2 3· 2 3 3· 6 = · Uv = ·U = ·U π π π Ausgangsspannung maximal bei Zündwinkel α = 0◦ b) Der natürliche Zündzeitpunkt ergibt sich, wenn die Spannung am Thyristor in Vorwärtsrichtung positiv wird, wenn also die Amplitude der folgenden Phasenspannung größer wird als die aktuelle Phasenspannung. c) Gleichrichterbetrieb: 0◦ ≤ α < 90◦ Ausgangsspannung Ud positiv Wechselrichterbetrieb: 90◦ ≤ α < 180◦ Ausgangsspannung Ud negativ 4.2 netzgeführt: Kommutierungsblindleistung kommt aus dem Netz lastgeführt: Kommutierungsblindleistung kommt von der Last selbstgeführt: Kommutierungsblindleistung kommt vom lastseitigen Stromrichter Vierquadrantenbetrieb: Betrieb eines Antriebs in beiden Drehrichtungen (Spannungsrichtungen) bei beiden Momentenrichtungen (Stromrichtungen), d.h. Motor– und Generatorbetrieb bei beiden Drehrichtungen und beiden Momentenrichtungen. 4.3 Direktumrichter: Vorteile: einfacher Aufbau, hohe Leistungen, preiswert Nachteile: nur für niedrige Frequenzen (= kleine Drehzahlen) Zwischenkreisumrichter: Vorteile: Entkopplung von Netz– und Maschinenseite, beliebige Ausgangsfrequenzen Nachteile: erhöhter Aufwand durch zusätzliche Bauelemente → teurer 4.4 a) Aufbau: beim U–Umrichter netzseitig 2 B6–Brücken, im Zwischenkreis ein Kondensator beim I–Umrichter netzseitig eine B6–Brücke, im Zwischenkreis eine Zwischenkreisdrossel Funktion: I–Umrichter: ausgangsseitig eingeprägter Strom U–Umrichter: ausgangsseitig eingeprägte Spannung I–Umrichter: Iz LD V2 1 V2 3 C1 V11 V1 3 V1 5 V2 5 C2 C3 V3 1 V3 3 V3 5 L1 L2 L3 ASM 3~ UN , fN V3 4 V3 6 C4 V3 2 C5 U1 , f1 variabel N , MMi C6 V1 4 V1 6 V1 2 STR I V2 4 V2 6 V2 2 STR II STR I: netzgeführter Stromrichter, Gleichrichtung der dreiphsigen Netzspannung Zwischenkreisdrossel LD : Erzeugung des konstanten Zwischenkreisstroms (Stromglättung) STR II: selbstgeführter Stromrichter, Erzeugung des Ausgangsstroms mit variabler Frequenz Lehrstuhl für Elektrische Antriebssysteme, TU München Elektrische Antriebs– und Umrichtertechnik Grundlagen der elektrischen Antriebe Übung 11 Blatt 8 U–Umrichter: 62798;: <=?>A@4B4CD-E!F2G4D->A@ 6!798H:4: 5 ! #"%$'&("*)%+-,/. +-02143 STR I: 2 netzgeführte B6–Brücken für beide Stromrichtungen Zwischenkreis: Erzeugung einer konstanten Zwischenkreisspannung (Glättung über LD und C) STR II: selbstgeführter Stromrichter für Ausgangsspannung mit variabler Frequenz und Amplitude b) Beim I–Umrichter entsteht durch Einprägung von Stromblöcken in den Wicklungen nach U = L · di/dt hohe Spannungsspitzen, die beim U–Umrichter durch Einprägung von Spannungsblöcken vermieden werden. c) 1. Eingriff: Einstellung der Amplitude des Stroms (I–Umrichter) bzw. der Spannung (U–Umrichter) mit netzgeführtem Stromrichter. 2. Eingriff: Einstellung der Frequenz der Ausgangsgröße mit selbstgeführtem Stromrichter 4.5 Aufbau: Bauelemente zur Erzeugung der Kommutierungsblindleistung (Kondensatoren, Dioden) entfallen. Kommutierung: Zweige können in freier Reihenfolge getaktet werden (keine Phasenfolge, keine erzwungene Kommutierung) Taktfrequenz: Höhere Taktfrequenz und schnellere Kommutierung, dadurch sinusförmigere Ausgangsgrößen Hilfsblatt:






![OFF ROAD 06-16_48-50_Service_Amarok_ThoK[...]](http://s1.studylibde.com/store/data/010848746_1-c9cb786280ccc863fd422157dbc6189c-300x300.png)