ppt
Werbung

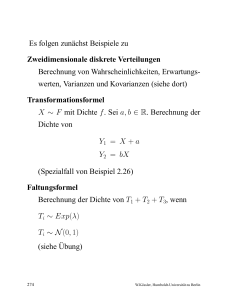
MATHEMATISCHE MODELLIERUNG AM BEISPIEL VERSCHIEDENER FALLSTUDIEN Seminar Angewandte Mathematik für LAK Professor Schmitt Maria Hutsteiner, Kerstin Kranz ÜBERBLICK Was ist Modellierung? Fallbeispiele: 1. Müllabfuhr – Optimierungsproblem 2. Rettungshubschrauber – Standortbestimmung Zusammenfassung MODELLIERUNG Modellbildung Reales Problem Mathematisches Problem Analyse Überprüfung Simulation Interpretation Reale Lösung Mathematische Lösung MÜLL MÜLL MÜLL Stadtreinigungen entsorgten 2007: Hamburg: ~754000 t, 587 kg pro Einwohner, 2066 t täglich Österreich: ~430 kg pro Einwohner Optimale Route: Spart Treibstoff, Zeit Geld Mei Go Guan „Chinesisches- Postboten-Problem“ ROUTENPLANUNG -MÜLLABFUHR Optimierungskriterien: Sackgasse Einbahnstraße jede Straße mind. einmal abfahren Anfangspunkt = Endpunkt MODELLIERUNG- GRAPHENTHEORIE aus Straßennetz Graph erstellen Graph: Ein Graph besteht aus einer Menge von Knoten, Kanten und einer Zuordnung, die jeder Kante ein Knotenpaar zuweist (Knoten sind Endpunkte der Kante) Grad: Anzahl der Kantenenden an einen Knoten MODELLIERUNG- GRAPHENTHEORIE Straßen gerade Kanten Kreuzungen, Ende Sackgasse Knoten Kantengewichte (verschiedene Parameter wie z.B. Weglänge, Durchfahrtszeit usw.) EULERGRAPHEN- EULERTOUREN Eulerweg: Ein Weg, der durch jede Kante eines zusammenhängenden Graphen genau einmal führt, heißt Eulerweg Eulergraph: Ein Graph, der eine Eulertour enthält, heißt Eulergraph Eulertour: Eulerweg mit gleichem Start-und Zielpunkt Algorithmen: Zwiebelschalen- Algorithmus (Hierholzer-Algorithmus) Fleurys Algorithmus ZWIEBELSCHALEN-ALGORITHMUS 1. Schritt: Wähle einen Startknoten 2. Schritt: Gehe auf unmarkierten Kanten und markiere diese Falls alle markiert Schritt 3 Falls nicht, suche neuen Startknoten, wiederhole Schritt 2 3. Schritt: Gehe entlang des ersten Kreises bis er einen weiteren berührt; gehe weiter auf dem neuen bis dieser wieder einen weiteren berührt usw. Gehe den zuletzt begonnenen zu Ende, dann den vorhergehenden, usw. bis alle Kanten besucht wurden FLEURYS- ALGORITHMUS Brücke: Kante in einem Graphen, bei deren Wegnahme der Graph in zwei Komponenten zerfallen würde 1. Schritt: beginne mit beliebiger Kante 2. Schritt: wähle nächste Kante so, dass sie im Restgraphen keine Brücke bildet … grün = Brücke UNGERADE KNOTEN Knoten besitz ungeraden Grad Bsp. 2 ungerade Knotengrade Mehr als 2 ungerade Knotengrade: Anzahl gerade: wie oben Anzahl ungerade: ???? UNGERADE KNOTEN Satz: In jedem Graphen ist die Anzahl der Knoten mit ungeradem Grad gerade. Satz: Die Summe aller Knotengrade eines Graphen = doppelte Anzahl der Kanten, (da jede Kante die Summe aller Knotengrade genau um 2 erhöht (Anfangs- und Endknoten)) aus jedem Graph lässt sich Eulergraph entwickeln THE PERFECT MATCH Matching: Teilgraph, in dem alle Knoten höchstens Grad 1 haben Minimal: Summe der Kantengewichte ≤ Summe der Kantengewichte bei jedem anderen Matching, das diese Knoten verbindet Perfektes Matching: nur Knoten vom Grad 1, alle Knoten sind zu Paaren verbunden STANDORTWAHL FÜR RETTUNGSHUBSCHRAUBER AUSGANGSPROBLEM: Ein Rettungshubschrauber soll mehrere Einsatzgebiete optimal versorgen. Was heißt „optimal“? BEISPIEL: gleichmäßig schnelle Versorgung der Unfallopfer BSP.: Gleichmäßig schnelle Versorgung Vereinfachte Modellannahmen: Modellieren Einsatzgebiete sowie Hubschrauberstandort als Punkte in der Ebene Flugzeit zw. A und B – proportional zur Länge der geraden Strecke zw. A und B Es wird nur die Zeit bis zur Erstversorgung des Unfallopfers berücksichtigt Unfallhäufigkeit ebenfalls nicht berücksichtigt BSP.: Gleichmäßig schnelle Versorgung Wenn wir annehmen, dass M Einsatzorte Ex1(a11 | a12), Ex2(a21 | a22),..., ExM(aM1 | aM2) zu beachten sind und X(x1 | x2) irgendein Standort für den Hubschrauber ist, so ist für m = 1,…, M die Euklidische Entfernung zwischen dem m-ten Standort Exm(am1 | am2) und X BSP.: Gleichmäßig schnelle Versorgung CENTER ZIELFUNKTION CENTER STANDORTPROBLEM ZWEI EINSATZORTE: Mittelpunkt der Strecke zw. den beiden Einsatzorten Ex2(-1,5 | 10) 10 8 X(1 | 8) Ex1(3,5 | 6) 6 4 2 -4 -2 2 4 6 8 10 4 3 r* 2 Ex1(1 | 2) r* Ex2(5 | 2) X*(3 | 2) 1 1 2 3 4 5 In der (gelben) Kreisscheibe um Ex1 mit Radius r* hat jeder Punkt X außer X* eine Entfernung von Ex2, die größer als r* ist. Analog hat jeder Punkt X außer X* in der (grünen) Kreisscheibe um Ex2 mit Radius r* eine Entfernung von Ex1, die größer als r* ist. Außerhalb der beiden Kreisscheiben ist die Entfernung sowohl von Ex1 als auch von Ex2 größer als r*. DREI EINSATZORTE – FALL1:(Spitzwinkeliges Dreieck) Umkreismittelpunkt 10 Ex2(5 | 9) 8 6 X(3 | 4) 4 Ex1(-2 | 2) -4 2 2 -2 -2 4 6 8 Ex3(-5 | -1) 10 Ex2(2 | 6) 6 4 X*(4 | 2) 2 Ex3(8 | 0) 2 -2 4 6 8 10 Ex1(2 | -2) Der einzige Punkt mit Euklidischer Entfernung kleiner oder gleich r* zu allen drei existierenden Standorten ist X*. FALL2:(Stumpfwink. Dreieck) 6 4 Ex2(1 | 3) Ex1(-5 | 3) 2 XM(0 | 1) -8 -6 -4 2 -2 -2 XU(-2 | -4) -4 -6 4 6 Ex3(5 | -1) FALL2:(Stumpfwink. Dreieck) Seien Ex1 und Ex2 die Endpunkte der längsten Seite und X* der Mittelpunkt dieser Seite. Dann gilt für jeden Standort X, der von X* verschieden ist: FALL 3 (?) – rechtwinkeliges Dreieck SATZ: MEHR ALS DREI EINSATZORTE: Lösung durch Probieren? Ex4(4 | 15) 14 Ex3(7 | 13) 12 100 10 8 6 X1(4 | 5) 4 2 Ex1(0 | 0) -2 2 4 6 8 10 Ex2(9 | -2) Ex4(4 | 15) 14 Ex3(7 | 13) 12 10 122 8 6 X2(5 | 4) 4 2 Ex1(0 | 0) -2 2 4 6 8 10 Ex2(9 | -2) Ex4(4 | 15) 14 Ex3(7 | 13) 12 101 10 8 6 X3(5 | 5) 4 2 Ex1(0 | 0) -2 2 4 6 8 10 Ex2(9 | -2) Ex4(4 | 15) 14 Ex3(7 | 13) 12 100 10 8 6 X1(4 | 5) 4 2 Ex1(0 | 0) -2 2 4 6 8 10 Ex2(9 | -2) MEHR ALS DREI EINSATZORTE: Zurückführung auf das Problem mit zwei oder drei Einsatzorten Für alle Paare und Tripel in der Menge Ex mache das folgende: Schritt 1: Bestimme den optimalen Center Standort X‘ und den optimalen Zielfunktionswert r‘ für das Center Standortproblem mit zwei bzw. drei Einsatzorten. Schritt 2: Bestimme den Kreis mit Radius r‘ um X‘. Falls die entsprechende Kreisscheibe alle Punkte in Ex enthält, ist X‘=X* und r‘=r* (X*... Optimaler Center Standort, r*... Optimaler Center Zielfunktionswert) 15 12 9 Ex2(14 | 7) r* ≈ 15,8 6 Ex1(-12 | 4) 3 -12 -9 -6 3 6 X*(3 | -1) -3 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) > 90° 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 > 90° Ex4(-9 | -5) 3 -3 6 9 12 15 18 -3 -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) 6 Ex1(-12 | 4) 3 -12 -9 -6 3 -3 6 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 15 12 9 Ex2(14 | 7) r* ≈ 15,8 6 Ex1(-12 | 4) 3 -12 -9 -6 3 6 X*(3 | -1) -3 9 12 15 18 -3 Ex4(-9 | -5) -6 Ex3(18 | -6) -9 Optimierung bei Kenntnis der Unfallhäufigkeit EIN HUBSCHRAUBER – ZWEI EINSATZORTE 1) Intuitive Lösungsfindung w1, w2 ... Unfallhäufigkeiten in Ex1 u. Ex2 Bsp.: w1< w2 , etwa w1=1, w2=2 Ex1 - Hubschrauber wird näher an Ex2 heranrücken w1 w2 1 2 X* Ex1 Ex2 Ex1 Ex2 w1 w2 w1 w2 3 3 Schwerpunkt Ex2 Optimierung bei Kenntnis der Unfallhäufigkeit EIN HUBSCHRAUBER – ZWEI EINSATZORTE 2) Zielfunktion und Optimierung Optimierung bei Kenntnis der Unfallhäufigkeit EIN HUBSCHRAUBER – ZWEI EINSATZORTE 2) Zielfunktion und Optimierung F ( X ) : w1d ( Ex1 , X ) 2 w2 d ( Ex2 , X ) 2 Optimierung bei Kenntnis der Unfallhäufigkeit EIN HUBSCHRAUBER – ZWEI EINSATZORTE 2) Zielfunktion und Optimierung F ( X ) : w1d ( Ex1 , X ) 2 w2 d ( Ex2 , X ) 2 Minimierung der Zielfunktion führt zur Lösung: w1 w2 X* Ex1 Ex2 w1 w2 w1 w2 Schwerpunkt Optimierung bei Kenntnis der Unfallhäufigkeit EIN HUBSCHRAUBER – N EINSATZORTE Zielfunktion: N F (Q ) : wi d ( Pi , Q ) 2 i 1 N Bedingung: gradF (Q) 2 wi ( Pi Q ) 0 i 1 Q N Lösung: i 1 N wi Pi i 1 wi n Hubschrauber – m Einsatzorte LÖSUNGSALGORITHMUS: Wähle n verschiedene Einsatzorte als Hubschrauberstandorte zufällig aus. Ordne jeden Einsatzort einem ihm nächstgelegenen Hubschrauberstandort zu. Verlege jeden Hubschrauber in den optimalen Standort der ihm zugeordneten Einsatzorte. Bewegt sich dabei kein Hubschrauber mehr, halte an, andernfalls gehe zu 2. n Hubschrauber – m Einsatzorte - BEISPIEL ZUSAMMENFASSUNG Optimierung des Weges in vielen Bereichen anwendbar (Busrouten, Speditionen, Postboten, Museen) Ortlieb et. al. Mathematische Modellierung. Vieweg und Teuber, Wiesbaden, 2007. Hamacher, E. Korn, R. Korn, Schwarze. Mathe und Ökonomie. Universum Verlag, Wiesbaden, 2004. Gritzmann, Brandenberg. Das Geheimnis des kürzesten Weges. 3. Auflage, Verlag Springer, Berlin, Heidelberg, 2005.