Vortrag
Werbung

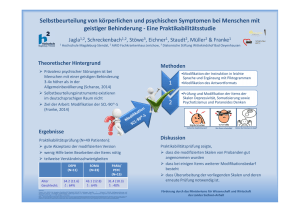
ASURO WS08/09 Magdalena Kowalcze Thomas Litzinger Übersicht Einleitung Zusammenbau Technik Modifikationen Projekt Ausblick/Fazit Einleitung Der ASURO ASURO ist die Abkürzung für „Another Small and Unique Robot from Oberpfaffenhofen“ Dieser kleine Roboter wurde am Deutschen Zentrum für Luft- und Raumfahrt (DLR), im Institut für Robotik und Mechatronik in Oberpfaffenhofen für die Lehre entwickelt Ursprünglich für ein Experiment des DLR School Lab konzipiert Zusammenbau Hardware Beim Hersteller Arexx Engineering sowie im Internet und in speziellen Elektronik-Fachmärkten zu erwerben ASURO ist als Bausatz erhältlich und besteht zum größten Teil aus handelsüblichen Elektronikbauteilen Ausführliche Bauanleitung mit Schaltplan, Lötanleitung und passender Software ist im Gesamtpaket enthalten Zusammenbau Hardware ASURO-Bausatz besteht aus: • 1 Hauptplatine • 1 RISC-Prozessor • Zahnräder • Gummibereifung • Motoren • große Anzahl verschiedener elektronischer Bauteile Zusammenbau Hardware Zu beachten: • Beim Zusammenbau ist auf die Richtige Polung der elektrischen Bauteile zu achten • Vor Handhabung eines elektrostatisch gefährdeten Bauteils ist es sinnvoll sich zu erden - Dazu gehören: der Prozessor ATMega8L und der Gatterbaustein Technik Hardware Sensorik 2 Lichtsensoren zur Linienverfolgung 6 Tastsensoren (signalisieren Kontakt mit Hindernissen) 2 Lichtschranken (Odometrie) Motorik 2 Motoren 4 Leuchtdioden zur Statusanzeige Sonstiges Batteriehalter für 4 Batterien 8 Bit Microcontroller (ATmega8) 8 kB Flash-Speicher Infrarot-Schnittstelle Technik Software Programmers Notepad Programmeditor zur Programmierung des ASURO in ANSI C Für die Erstellung von Programmen wird vom Hersteller eine Programmbibliothek mitgeliefert - Besteht insbesondere aus denn beiden Dateien: asuro.h und asuro.c Neue Asuro Library wurde für unser Projekt verwendet Technik Software ASURO Flash Tool 1.2 Wird zur Übertragung eines Programms in Form einer kompilierten hex-File in den Mikrocontroller des ASURO verwendet Technik Software HyperTerminal Kommunikationsprogramm um Daten zu empfangen, die der ASURO über die Schnittstelle sendet Diese können eingesehen und bestimmte Messungen durchführt werden Modifikation Verkleidung der Liniensensoren - Abdeckung der Liniensensoren - Vollverkleidung Modifikation Verkleidung der Odometrie Sensoren Modifikation Achsenspiel verringern durch das einsetzen von Unterlegscheiben Projekt Sensortests Regelung Tempomat Multitasking Visualisierung Linienverfolgung Test mit Vollverkleidung 80,0 60,0 Helligkeitswert 40,0 links 20,0 rechts 0,0 diff -4,0 -3,0 -2,5 -2,0 -1,5 -1,0 -0,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0 4,0 -20,0 -40,0 -60,0 Entfernung zum Linienmittelpunkt Odometrieauswertung Odometrietest 800 700 Helligkeit 600 500 links rechts 400 300 200 100 0 1 11 21 31 41 51 61 71 81 91 101 111 121 Zeit in ms Regelung Verwendet PI(D)-Regler für Linientreue - genau - sehr schnell Vergleich mit 3 Punkt Regelung Tempomat Ziel: ASURO soll mit konstanter Geschwindigkeit Steigung/Gefälle zurücklegen Zählen der s/w Übergänge an der Encoderscheibe Parallele DV Vorgabe: ASURO soll gleichzeitig Regeln und Senden Umsetzung: Threads und Semaphore Eigene Write-Funktion entwickeln Multitasking durch Zeitgeber Ausblick Umsetzung der Streckenvisualisierung Homepage erstellen Fazit Guter Einstieg in die Robotik Erweiterbarkeit (Kosten) Bauteile sind individuell geringer Speicher