Magnetometer FGM-3
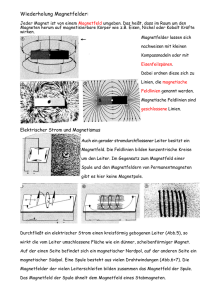
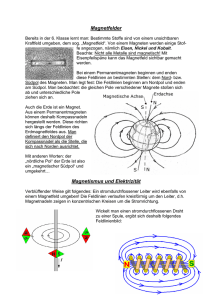
Werbung

Magnetometer FGM-3 Kalibrierung und Untersuchungen mit dem Selbstbaumagnetometer FGM-3 von Speake & Co. 11TG1 2. Trimester 2008/09 LTAM 2008/09 Kneip R. 1 1. Physikalische Grundlagen Jeder Magnet hat zwei Pole: Nord- und Südpol. Gleichartige Pole stossen sich ab, ungleichartige Pole ziehen sich an. Den Raum, in dem ein Magnet Kraftwirkungen ausübt, nennt man magnetisches Feld. Die magnetischen Feldlinien zeigen in einem Feld die Richtung der wirkenden Kraft an. 2 1. Physikalische Grundlagen Die Feldlinien sind geschlossene Linien. Ausserhalb des Magneten verlaufen sie vom Nord- zum Südpol. 3 2. Das Magnetfeld der Erde Der magnetische Südpol der Erde liegt in der Nähe des geographischen Nordpols! 4 2. Das Magnetfeld der Erde 5 2. Das Magnetfeld der Erde Eine frei bewegliche Magnetnadel stellt sich unter der Wirkung des magnetischen Feldes in Richtung der Feldlinien ein. Deklination: Abweichung der Magnetnadel von der geographischen Nord-Süd-Richtung. Inklination: Abweichung von der Horizontalen 6 2. Das Magnetfeld der Erde 7 2. Das Magnetfeld der Erde 8 2. Das Magnetfeld der Erde 9 2. Das Magnetfeld der Erde Stärke des Magnetfeldes am Aquator: 30 μT in Mitteleuropa: 48 μT, wovon: 44 μT in der Vertikalen und 20 μT in der Horizontalen Bestimme aus diesen Werten die Inklination! 10 2. Das Magnetfeld der Erde 11 3. Physikalische Grössen Magnetische Feldstärke H [H] = A/m ( = Ampère / Meter) alte Einheit Oersted: 1 Oe = 1000/(4π) A/m = 79.58 A/m 12 3. Physikalische Grössen Magnetische Induktion B [B] = Vs/m2 = T (Tesla) Im Vakuum gilt: B = μ0 μr H mit: μ0 = 4π 10-7 (Vs)/(Am) alte Einheit Gauss: 1 G = 10-4 T Material Supraleiter Vakuum Luft Eisen amorphe Metalle μr 0 1 ≈1 300 ... 10 000 700 … 500 000 13 4. Prinzip der Schaltung Sensor FGM-3 Integrator DA-Wandler 14 5. Zusammenbau Spannungsstabilisation 5 V Sensor FGM-3 Empfindlichkeit Integrator (8 Sekunden) DA-Wandler (8 Bit) Reset Output 15 5. Zusammenbau 16 5. Zusammenbau 17 5. Zusammenbau 18 5. Zusammenbau 19 5. Zusammenbau Pos. 1: geringste Empfindlichkeit Pos. 4: maximale Empfindlichkeit 20 6. H in Zylinderspule Magnetische Feldstärke in einer Luftspule H=IN/l I: Stromstärke (A) N: Windungszahl l: Länge der Spule 21 7. Messreihen – Vorschläge (Gr2) 22 7. Messreihen – Vorschläge (Gr1) Feldstärke in Abhängigkeit von der Zeit Einfluss von elektrischen Apparaten (Störungen) Messung mit Luftspule; bekanntes magn. Feld → Messen Ausgangsspannung; Einfluss von Beta und Gamma Strahlung Einfluss von UV-Strahlung 23 7. Messreihen - Vorschläge Verschiebung innerhalb der Spule B = f(s) Stromstärke in der Spule (Pos. 1..4) B = f(I) Entfernung eines Permanentmagneten B = f(d) Abhängigkeit vom Azimut Wirkung möglicher Störquellen Schwankungen der Ausgangsspannung B = f(ψ) 24 8. zu bedenken ... Ausgang am AD-Wandler: 0 V bis 2.56 V Reset: Zurücksetzen auf 2.56 V / 2 = 1.28 V Bei einer Auflösung von 8 Bit entspricht ein Schritt: 2.56 V / 256 = 0.01 V also: 10 mV Auflösung Integrationsdauer: 8 Sekunden! 25 9. Schaltung B = f(I) Erzeugung eines variablen Magnetfeldes innerhalb der Spule durch einen variablen Strom 6 kOhm 100 kOhm Spule A U≤6V 26